Ieee Ie Jun02

of 12
-
Upload
manochehr123 -
Category
Documents
-
view
215 -
download
0
Transcript of Ieee Ie Jun02
-
7/31/2019 Ieee Ie Jun02
1/12
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 49, NO. 3, JUNE 2002 665
Proposition of an Offline Learning CurrentModulation for Torque-Ripple Reductionin Switched Reluctance Motors: Design
and Experimental EvaluationLuis Oscar de Araujo Porto Henriques, Member, IEEE, P. J. Costa Branco, Member, IEEE,
Lus Guilherme Barbosa Rolim, and Walter Issamu Suemitsu, Member, IEEE
AbstractA new offline current modulation using a neuro-fuzzycompensation scheme for torque-ripple reduction in switched re-luctance motors is presented. The main advantage of the proposedtechnique is that the torque signal is unnecessary. The compen-sating signal is learned prior to normal operation in a self-commis-sioning run, capturing the necessary current shape to reduce the
torque ripple.Simulation results verify first theeffects of speed andthen load changes on the compensator performance. Implementa-tion of the proposed technique in a laboratory prototype shows thefeasibility and accuracy of the respective offline scheme.
Index TermsAutomatic learning, fuzzy neural networks, intel-ligent control, switched reluctance drives, torque-ripple minimiza-tion.
I. INTRODUCTION
T ORQUE-RIPPLE reduction in switched reluctance motors(SRM) has become a major research theme for this ma-chine today. In servo control applications or when smooth con-
trol is required at low speeds, reduction of the torque ripple
becomes the main issue in an acceptable control strategy. In
this case, even using a fuzzy proportional-plus-integral (PI)-like
control such as the one described in [1], the results are not sat-
isfactory because the controllers output signal, which is usedas a reference signal for the current control in the power con-
verter, causes sustained torque oscillations in steady state. Fur-
thermore, torque ripple alters with the speed of the SRM and
with the magnitude of the load applied to it.
The first approach for torque-ripple reduction in SRMs using
an offline learning technique is proposed in [2]. A step-forward
offline approach is presented in [3] and [4], which also uses
soft-computing techniques to learn the best function to reduce
the ripple. Recently, more sophisticated learning control algo-rithms were proposed [5][7] that enhanced online approaches
adapting the controller to changes in the motors characteristics.
Manuscript received February 23, 2001; revised October 24, 2001. Abstractpublished on the Internet March 7, 2002.
L. O. A. P. Henriques, L. Rolim and W. I. Suemitsu are with the UniversidadeFederal do Rio de Janeiro/COPPE-Eltrica, CEP 21945-970 Rio de Janeiro,Brazil (e-mail: [email protected]).
P. J. Costa Branco is with the Mechatronics Laboratory, Instituto SuperiorTcnico, Lisbon 1049-01, Portugal (e-mail: [email protected]).
Publisher Item Identifier S 0278-0046(02)04916-X.
However, these approaches need to be improvedconcerning two
aspects.
Instead of starting from a zero knowledge (all rules at a
zero value), the fuzzy system responsible for the ripple
reduction can be initialized with rules obtained from a
previous simulation study with the SRM. In this paper, anew offline learning strategy, which has used a simulation
model of the SRM to acquire the initial knowledge rule
base, is proposed.
The use of the machine torque, measured or estimated, to
implement the torque-ripple reduction techniques online,
decreases their robustness and limits the application of the
online control algorithm mainly due to costs. Hence, a
compensation scheme that allows its online use without
measurement or estimation of the torque signal needs to
be researched.
Based on these two aspects, we have decided to take a step
backward and, first, redesign an offline approach that will allow
us to design a compensation scheme using a learning scheme
that does not use a torque signal. In the technique proposed in
this paper, the compensating signal is added to the output of a
PI controller, in a current-regulated speed control loop, which
adjusts automatically the machine currents to reduce the torque
ripple of the motor. The simulated study and the implementation
of the proposed technique are presented in this paper. The ex-
perimental results achieved show how the motor phase currents
are shaped to reduce the torque ripple, also considering different
load values.
II. SR DRIVE MODELING
The electromagnetic equation of each SRM phase
is given by
(1)
with each phase torque originated by the respective magnetic
co-energy variation as
(2)
0278-0046/02$17.00 2002 IEEE
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?- -
7/31/2019 Ieee Ie Jun02
2/12
666 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 49, NO. 3, JUNE 2002
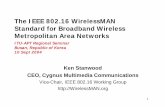
Fig. 1. (a) Inductance profile . (b) Magnetic flux . (c) Phase torque .
The mechanic equation of the SRM using the phase torque ex-
pression in (2) results in
(3)
where
inertia;rotor speed;
phase voltage;
stator phase resistance;
phase current;
flux linkage;
phase torque;
load torque;
rotor position;
magnetic co-energy.
Equation (1) consists of the instantaneous voltage across the
terminal of each phase of the machine winding, which is divided
into a voltage drop at stator resistance plus the voltage induced
in the winding by flux linkage variation. The SRM has a varia-
tion of the magnetic co-energy due to its doubly salient structure
and, therefore, produces the reluctance torque given by (2).
The linkage flux, and thus each phase inductance, is a func-
tion of position and current due to SRM mechanical structure
and the nonlinearity of the SRM magnetic characteristic
. I n [8], the 6/4 SR machine used in this work was modeled
by finite-element analysis (FEM) providing us with its magneticdata. Each phase inductance profile and respective flux
linkage are shown in Fig. 1(a) and (b), respectively. The
phase torque is computed by (2) using the well-known defini-
tion of co-energy given by
(4)
resulting in the phase torque profile shown in Fig. 1(c).
To energize the SRM, shown in Fig. 2(b), a -bridge asym-
metric-type converter has been used, as seen in Fig. 2(a). The
converter uses insulated gate bipolar transistors (IGBTs) with
http://-/?-http://-/?- -
7/31/2019 Ieee Ie Jun02
3/12
HENRIQUES et al.: PROPOSITION OF AN OFFLINE LEARNING CURRENT MODULATION 667
Fig. 2. (a) -bridge power converter. (b) 6/4 SR machine.
freewheeling diodes, and the continuous voltage is obtained
from a diode rectifier. A hysteresis current controller was used,
with a microcomputer establishing the energizing and deen-
ergizing angles, and the reference current signal . Some-
times, for a high-speed motor operation, the induced voltageelectromotive force (EMF) can have the same order of magni-
tude of the voltage . In this case, a voltage reserve becomes
necessary to maintain the voltage supply high enough to guar-
antee the hysteresis current control. When this is not possible,
the current control scheme has to be changed to single-pulse op-
eration.
Using the above prototype, tests [9] were made to verify the
respective SR drive model developed. These tests were per-
formed with the prototype operating in open-loop mode and
for a set of operating conditions. Fig. 3(a) shows the phase
current simulated for a reference of 2 A, nominal dc voltage
V, and with and . In Fig. 3(b),the same conditions have been used in the prototype, showing
the phase current measured during the machine operation with
a close correlation with the simulated currents.
For comparison of the machine steady-state operation ob-
tained with the model and with the experimental prototype, two
tests were performed. In these tests, we considered two refer-
ence current values, A and A, and varia-
tion of the angle from 40 to 67 , maintaining the value
constant. Fig. 3(c) and (d) shows the measured and simulated
motor speeds obtained for 1.5 and 2.5 A, respectively. From the
results achieved, it is shown that the steady-state responses of
the model match well the measured data.
III. PROPOSED TECHNIQUE
A. Compensation Scheme
The SR drive has been designed to operate in a speed control
mode. Fig. 4 shows, in a block diagram, the proposed compen-
sation scheme. The basic idea for the proposed ripple compen-
sation scheme is described in Fig. 5. The output signal produced
by the compensator, , is added to the PI controllers
output signal , which, ideally, should be constant in steady
state but producing significant ripple, as shown in Fig. 5(a). The
resulting signal after the addition is used as a compensated
current signal for the SR drive, as shown in Fig. 5(b). The com-
pensating signal should then be adjusted in order to produce a
ripple-free output torque. As shown in Fig. 4, this signal can be
a function of rotor position, motor speed, torque load value, and
the phase current
(5)
In fact, (5) is a function that possesses high mathematical com-
plexity and, therefore, the production of this signal is quite com-
plicated. As a first solution to decrease the function complexity,
the number of variables was reduced to only two: rotor position
and the current , which was replaced by the PI current signal
also correlated with the magnitude of the load torque . Hence,
(5) becomes
(6)
The compensating function should then be learned in order
to produce the necessary adjustments to the PI current signal,
thus reducing the torque ripple.
http://-/?-http://-/?- -
7/31/2019 Ieee Ie Jun02
4/12
668 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 49, NO. 3, JUNE 2002
Fig. 3. Steady-state performance. (a) Simulated and (b) experimental phase currents. Measured and simulated motor speeds for (c) A and (d)A.
Fig. 4. Block diagram of the SR drive system with the compensating signal.
B. Offline Learning of Compensating Function
Fig. 5(c) shows the proposed compensation scheme. The
neuro-fuzzy compensation block uses the rotor position and
the PI current signal as inputs, with its output being the
compensating current increment. The first step of compen-
sation corresponds to the offline training of the neuro-fuzzy
compensator. This is adjusted iteratively through the learning
algorithm, with the torque ripple signal used as the
training error information.
-
7/31/2019 Ieee Ie Jun02
5/12
HENRIQUES et al.: PROPOSITION OF AN OFFLINE LEARNING CURRENT MODULATION 669
(a)
(b)
(c)
Fig. 5. Basic idea of proposed torque-ripple compensation technique.(a) Torque ripple produced by constant current reference. (b) Ripple-free torqueproduced by compensated phase current. (c) Block diagram of the proposedneuro-fuzzy torque-ripple compensator.
1) Neuro-Fuzzy System Structure: The adaptive-networksbased fuzzy inference system (ANFIS) [12] has been
used to implement the compensator. Fig. 6(a) shows
its network structure, which maps the inputs by the
membership functions and their associated parameters,
and therefore through the output membership functions
and corresponding associated parameters. These will
be the synaptic weights and bias, being associated to
the membership functions adjusted during the learning
process. The computational work for the parameters
acquisition (and their adjustments) is helped by the
gradient-descendent technique, which shows how much
the error decreases. When the gradient is obtained,
any optimization routine can be applied to adjust the
parameters and, therefore, decrease the error.
The ANFIS neuro-fuzzy system operation can be sum-
marized in two steps.
a) The set of membership functions has to be chosen,
i.e., their number and corresponding shape.
b) The inputoutput training data are used by the
ANFIS system. Initially, this system makes a clus-
tering study of the data to identify natural groups
of data, to obtain a concise and significant repre-
sentation of the systems behavior. As we do not
know how many clusters exist (the number of rules
composing the neuro-fuzzy compensator), another
technique must be used, the subtractive clustering
[13], which quickly estimates the number of clus-
ters.
2) Learning Scheme: A second part consists in the iterative
training of the neuro-fuzzy compensator. The presence ofthis iteration comes from the capability to simulate the
system and, after a predefined simulation time, to ob-
tain the simulation results and use them in the learning
process.
Training data were obtained from simulations of steady-state
operation of the complete SR drive system. At each training
iteration, the dc component was removed from the torque signal
so that only the ripple remains. This torque ripple data is then
tabulated against the mean value of the PI current and against
the rotor angular position. This data set is then passed to the
training algorithm, so that the torque ripple is interpreted by the
compensator as error information for each currentangle pair.The compensator output is then readjusted to reduce the error
(which is, in fact, the torque ripple), and this process is repeated
until some minimum value torque ripple has been reached.
Fig. 6(b) shows the process for training the neuro-fuzzy com-
pensator. The output of the training block comprehends all main
variables from the system, and only is used in the simulated
system to train it again. The compensating current [shown as
the dotted line in Fig. 6(b)] is also produced and used in the
system for the next training iteration. The halting criterion to
stop is, in this case, the maximum number of iterations set
a priori. When the iteration counter reaches the learning
process stops. Note that the training time will depend on themicrocomputer speed and mainly on the set maximum number
of iterations .
The choice of stopping criteria is very important for the sta-
bility of the method, since the converter may not be able to pro-
duce the required compensated currents at any speed or load. In
this case, persisting on training may lead to output windup in
the compensator. The main reason for this is that, after training,
the compensator can require current magnitudes that could not
be reached by the converter. Therefore, a compromise between
the converter capabilities and the currents required by the com-
pensator is needed.
The optimization of the neuro-fuzzy system was performedby a hybrid technique that uses the backpropagation and the
mean-squared error method. The rule set was initially gener-
ated by the grid partition technique. After training, the compen-
sator signal can be generated and added to the reference cur-
rent from the PI controller. By varying the PI current in dis-
crete values and the rotor position, the compensating relation
was extracted and is shown in Fig. 6(c). In
this figure, the compensation values below 1 A are smaller then
the values found with currents near 3 A. This happens because,
for the low speed produced with this current, there is no need
for high compensation current values.
http://-/?-http://-/?-http://-/?-http://-/?- -
7/31/2019 Ieee Ie Jun02
6/12
-
7/31/2019 Ieee Ie Jun02
7/12
HENRIQUES et al.: PROPOSITION OF AN OFFLINE LEARNING CURRENT MODULATION 671
(a)
(b)
(c)
(d)
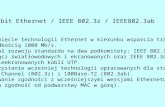
Fig. 7. Phase current for 1800 r/min: (a) without and (b) with compensation.Phase current for 500 r/min: (c) without and (d) with compensation.
plotted in Fig. 9(c). Since the machine has a 6/4 structure, the
converter produces 12 current pulses per rotor turn. Therefore,
torque pulsation occurs at a frequency 12 times higher thanthe frequency of rotation. This is the reason why the harmonic
spectrum exhibits nonzero components only for orders multiple
of 12. The magnitudes of the harmonics are expressed as per-
centage of the mean value.
It should be noticed in Fig. 9(c) that the first nonzero har-
monic (12th) exhibits a quite high magnitude (approximately
13%). However, after ten training iterations of the neuro-fuzzy
compensator, the harmonic content of the output torque be-
comes significantly lower, as shown in Figs. 8(d) and 9(d). It
can be seen that the total harmonic content is now very low,
and the 12th harmonic becomes lower than 0.5% of the mean
torque.
(a)
(b)
(c)
(d)
Fig. 8. Total torquefor 1800 rpm: (a)without and(b) with compensation. Totaltorque for 500 rpm: (c) without and (d) with compensation.
After ten training iterations, the compensated current reference
produces phase current pulses like those shown in Fig. 7(d). As
expected, the current values are higher at the beginning and at
the end of the current pulse. This pulse shape is consistent withthe torque characteristics of the SR motor shown in Fig. 1(c),
which produces less torque at the beginning of pole overlapping
and just before the aligned position.
B. Generalization Tests
We show the compensator action for two different motor
speeds. Results are presented as current in phase A, total torque,
and corresponding frequency spectrum.
1) Current in Phase A: Fig. 7(a) and (b) shows the cur-
rent signal in phase A before and after the addition of
the compensating signal for the nominal speed operation
-
7/31/2019 Ieee Ie Jun02
8/12
672 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 49, NO. 3, JUNE 2002
(a)
(b)
(c)
(d)
Fig. 9. Frequency spectrum of the total torque for 1800 r/min: (a) without and(b) with compensation. Frequency spectrum of the total torque for 500 r/min:(c) without and (d) with compensation.
(1800 r/min), respectively. In a similar way, Fig. 7(c) and
(d) shows the current for a speed of 500 r/min.
2) Total torque: The total torque before and after compensa-tion is shown in Fig. 8. The variance signal of torque was
used as a quantitative measurement of torque ripple as in-
dicated in each result. The results clearly show the effects
of the compensating signal, mainly Fig. 8(d) where it can
be seen that this technique is very efficient to low speeds.
3) Frequency Spectrum: Fig. 9 shows the frequency spec-
trum of the total torque for both motor speeds before
[Fig. 9(a) and (c)] and after [Fig. 9(b) and (d)] the com-
pensation. As the converter has 12 pulses by rotation, it is
clear that the predominant harmonic is of the 12th order
and its multiples, and is then reduced after the compensa-
tion process.
V. TEST DRIVE AND EXPERIMENTAL RESULTS
A switched reluctance drive prototype was built for our tests.
It consisted of the 6/4 SR motor, 750 W, with nominal speed
equal to 1800 r/min shown in Fig. 2(a), and the H-bridge power
converter shown in Fig. 2(b). The converter used IGBTs with
freewheeling diodes, and the continuous voltage was ob-
tained from a diode rectifier. A hysteresis current controller was
used with a microcomputer establishing the energizing and
deenergizing angles, and the reference current . Note
that the signal , used by the hysteresis controller with an hys-
teresis band of 0.1 A, is the sum of the compensation signal and
the current produced by the PI controller.
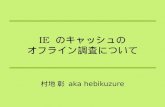
A. Open-Loop Compensation
The first experimental test was done with the SR drive op-
erating in the open-loop mode, without the PI speed controller,
for a constant reference current of 2 A and without external load
applied. The reason for this test was to verify the pulse current
modulation and the consequent ripple reduction without influ-
ence of the PI controller dynamics on the speed control loop.Two situations were taken into consideration: one without
compensation and other when the neuro-fuzzy compensator is
inserted into the SR drive system. For this test, Fig. 10(a) shows
the phase current signal when there is no compensation, and
Fig. 10(b) shows the current when the neuro-fuzzy compensator
is inserted. The current shape is modified following the curve
previously learned and stored in the compensating function in
Fig. 6(c) for A. The current correction follows the
shape of the compensation curve in Fig. 10(c) between 45 90 ,
which are the necessary increments to be added in the reference
current of 2 A. Note that all current pulse shapes follow the left
side of the compensation curve since the motor during the tests
had its speed reversed. Fig. 10(d) shows the frequency spectrumof the motor speed signal before the compensator has been in-
serted, and Fig. 10(e) the spectrum after the compensation.
B. Closed-Loop Compensation
In this second test, the PI speed controller was inserted in
the SR drive system. The essay was performed for a reference
motor speed of r/min, equal to that reached in the
previous test, and since no external load was applied, the current
reference to be achieved was also about 2 A, as before. Again,
two situations have to be observed: before and after the neuro-
fuzzy compensation. Fig. 11(a) shows the current signal when
there is no compensation and Fig. 11(b) shows the current signal
when the compensator was inserted.
C. Closed-Loop Compensation External Load
This test was made with an external load applied to the SR
motor by a PM synchronous generator, which was connected
to an external resistance of 500 W through a three-phase diode
bridge. The PM generator has a high inertia constant. Therefore,
there was not a significant torque ripple in the SR motor pro-
voked by the PM generator. Fig. 11(c) and (d) shows the phase
current before and after compensation, respectively. When the
compensator was inserted, the current shape was changed to
follow the learned compensating curve shown in Fig. 11(e),
-
7/31/2019 Ieee Ie Jun02
9/12
HENRIQUES et al.: PROPOSITION OF AN OFFLINE LEARNING CURRENT MODULATION 673
Fig. 10. Phase current (a) without and (b) with compensation (vertical: 1 A/div and horizontal: 50 ms/div 40 mechanical degrees). (c) Compensation signal forA. Frequency spectrum of the motor speed (d) before and (e) after compensation.
which shows the necessary increment to be added to the new
reference current of about 3 A.
A second test was done with a double load applied.
Fig. 12(a) and (b) shows the current pulses before and after
-
7/31/2019 Ieee Ie Jun02
10/12
674 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 49, NO. 3, JUNE 2002
Fig. 11. PI closed-loop (a) without and (b) with compensation. PI controller external load for (c) no compensation and (d) compensation (vertical: 1 A/div andhorizontal: 50 ms/div 40 mechanical degrees). (e) Compensation signal for A.
compensation, respectively. The current shape was changed
to follow the compensating curve in Fig. 12(c). Fig. 12
shows the frequency spectrum of the motor speed signal
before [Fig. 12(d)] and after [Fig. 12(e)] the compensator
was inserted, revealing again the torque-ripple reduction in
the motor operation.
-
7/31/2019 Ieee Ie Jun02
11/12
HENRIQUES et al.: PROPOSITION OF AN OFFLINE LEARNING CURRENT MODULATION 675
Fig. 12. PI controller double external load for (a) no compensation and (b) compensation (vertical: 1 A/div and horizontal: 50 ms/div 40 mechanical degrees).(c) Compensation signal for A. Frequency spectrum of the motor speed (d) before and (e) after compensation.
VI. CONCLUSIONS
An offline torque-ripple reduction scheme using aneuro-fuzzy compensation mechanism has been presentedin this paper. The proposed technique adds a compensating
signal to the PI speed controller, which has been offline learnedby a neuro-fuzzy system.
During the simulation tests, torque ripple was used as thetraining error variable. However, this approach would not bevery practical for online implementation in a real system since
-
7/31/2019 Ieee Ie Jun02
12/12
676 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 49, NO. 3, JUNE 2002
torque is a variable that is difficult to measure. For continuousonline training, other variables could be more appropriate, suchas acceleration or speed ripple, which are now being studied.However, the torque could still be used directly in an offlinetraining system, e.g., for converter programming on a test rig atthe factory.
Simulation results of the switched reluctance drive have
shown the good ripple reduction achieved by the incorporationof the compensating signal in the current waveform, whichchanges its shape according to the machines operation.
The presented offline technique has been tested experimen-tally. The results have shown clearly how the current has beenmodulated to reduce torque ripple for different motor speedsand load values. However, the applicability of the scheme con-sidered in this paper is restricted due to the need for an of-fline training and the use of a torque sensor. To overcome thisproblem, the machine needs to be operated in a test-bench groupusing a torque sensor to allow the offline training of the compen-sator. In addition, since different SRMs have diverse inductanceprofiles because of the construction features and varied mate-rials, the scheme proposed in this paper cannot be applied to amotor without a pretraining process to obtain the compensationfunction. The authors are currently researching the system withonline training [10], [11].
ACKNOWLEDGMENT
The authors would like to express their gratitude to
CAPES/Brazil and ICCTI/ Portugal for their support.
REFERENCES
[1] S. Bolognani and M. Zigliotto, Fuzzy logic control of a switched reluc-tance motor drive, IEEE Trans. Ind. Applicat., vol. 32, pp. 10631068,Sept./Oct. 1999.
[2] R. C. Kavanaugh, J. M. D. Murphy, and M. Egan, Torque ripple mini-
mization in switched reluctance drives using self-learning techniques,in Proc. IEEE IECON91, 1991, pp. 289294.
[3] D. S. Reay, M. M. Moud, T. C. Green, and B. W. Williams, Switchedreluctance motor control via fuzzy adaptive systems, IEEE Contr. Syst.
Mag., vol. 15, pp. 200206, June 1995.[4] J. Donovan, P. Roche, R. C. Kavanaugh, M. Egan, and J. M. D. Murphy,
Neural network based torque ripple minimization in a switchedreluctance motor, in Conf. Rec. IEEE-IAS Annu. Meeting, 1994, pp.12261231.
[5] S. Mir, M. E. Elbuluk, and I. Husain, Torque-ripple minimization inswitched reluctance motors using adaptive fuzzy control, IEEE Trans.
Ind. Applicat., vol. 35, pp. 461468, Mar./Apr. 1999.[6] A. D. Cheok and N. Ertugrul, Use of fuzzy logic for modeling, estima-
tion, and prediction in switched reluctance motor drives, IEEE Trans.Ind. Electron., vol. 46, pp. 12071224, Dec. 1999.
[7] S. Russa, I. Husain, and M. E. Elbuluk, Torque-ripple minimization inswitched reluctance machines over a wide speed range, IEEE Trans.
Ind. Applicat., vol. 34, pp. 11051112, Sept./Oct. 1998.[8] J. M. L. Nascimento, L. G. B. Rolim, P. Heidrich, W. I. Suemitsu, and
R. Hanitsch, Design and simulation results of a switched reluctancemotor,in Proc. 3rd Brazilian PowerElectronicsConf., COBEP95,SoPaulo, Brazil, Dec. 1995, pp. 7983.
[9] F. Soares and P. J. Costa Branco, Simulation of a 6/4 switched re-luctance motor based on Matlab/Simulink environment, IEEE Trans.
Aerosp. Electron. Syst., vol. 37, pp. 9891009, July 2001.[10] L. O. P. Henriques, P. J. Costa Branco, L. G. Rolim, and W. I. Suemitsu,
Automatic learning of pulse current shape for torque ripple minimiza-tion in switched reluctance machines,in Proc. European Control Conf.,Porto, Portugal, Sept. 2001, pp. 232237.
[11] 6th Online World Conf. Soft Computing in Industrial Applications(WSC6) (2001, Sept.). [Online]. Available: http://vision.fhg.de/wsc6
[12] J. R. Jang, ANFIS: Adaptive-networks based fuzzy inference system,IEEE Trans. Syst., Man, Cybern., vol. 23, pp. 191197, May/June 1993.
[13] S. Chiu, Fuzzy model identification based on cluster estimation, J.Intell. Fuzzy Syst., vol. 2, no. 3, 1994.
Luis Oscar de Arauj o Porto Henriques(S95M99) was born in Juiz de Fora, Brazil, in1973. He received the B.Sc. degree in electricalengineering in 1997 from the Federal Universityof Juiz de Fora, Juiz de Fora, Brazil, and the M.Sc.degree in electrical engineering and the Ph.D. degreein 1999 from the Federal University of Rio deJaneiro, Rio de Janeiro, Brazil.
Since December 2000, he has been with the Insti-
tuto Superior Tcnico, Lisbon, Portugal, where he iscurrently a Research Student. His main research in-terests include power electronics, electrical motor drives and intelligent control.
Dr. Henriques is a member of the Brazilian Society for Automatic Controland Brazilian Power Electronics Society.
P. J. Costa Branco (M92) is currently an AssistantProfessor in the Section of Electrical Machinesand Power Electronics, Department of Electricaland Computing Engineering, Instituto SuperiorTcnico (IST), Lisbon, Portugal, where he hasbeen with the Mechatronics Laboratory/DEEC-ISTsince 1992. His research interests include soft-com-puting techniques, and he is presently engagedin research on advanced learning control tech-niques for electromechanical systems. He hasbeen a referee of international scientific journals
and participated on the boards of international meetings. He has authorednumerous articles published in international scientific journals such as theIEEE TRANSACTIONS ON MAGNETICS, IEEE TRANSACTIONS ON SYSTEMS,MAN, AND CYBERNETICS, IEEE TRANSACTIONS ON FUZZY SYSTEMS, IEEETRANSACTIONS ON INDUSTRIAL ELECTRONICS, Pattern Recognition Letters,Fuzzy Sets and Systems, and European Transactions on Electrical Power
Engineering.
Lus Guilherme Barbosa Rolim was born inNiteri, Brazil, in 1966. He received the B.S. and
M.S. degrees from the Federal University of Riode Janeiro (UFRJ), Rio de Janeiro, Brazil, andthe Dr.-Ing. degree from the Technical UniversityBerlin, Berlin, Germany, in 1989, 1993, and 1997,respectively, all in electrical engineering.
Since 1990, he has been a Faculty Member ofthe Electrical Engineering Department, EscolaPolitcnica, UFRJ, where he teaches and conductsresearch on power electronics, drives, and micropro-
cessor control. He is a member of the Power Electronics Research Group atCOPPE/UFRJ and has authored more than 20 papers published in Brazilianand international conference proceedings and technical journals.
Walter Issamu Suemitsu (M81) received theElectrical Engineer degree in 1975 from the EscolaPolitcnica da Universidadede SoPaulo, SoPaulo,Brazil, the M.Sc. degree in electrical engineeringfrom COPPE/Federal University of Rio de Janeiro,Rio de Janeiro, Brazil, and the Doctor degree inelectrical engineering from the Institut NationalPolytechnique de Grenoble, Grenoble, France.
Since 1977, he has been teaching and conductingresearch in the Departamento de Eletrotcnica,Escolade Engenharia, UFRJ, where he is currently an As-
sociate Professor. Since 1986, he has also been an Associate Professor in thePrograma de Engenharia Eltrica, COPPE/UFRJ. His research interests includeelectric machine drives and applications of power electronic converters to elec-trical drives, in particular, applications of digital control using DSPs and oflearning-based control methodologies, such fuzzy logic, neural networks, andneuro-fuzzy methods.
http://-/?-http://-/?-http://-/?-http://-/?-