[IEEE 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing...
8
Solving bicriterion optimization problems by parallel simulated annealing Zbigniew J. Czech Silesia University of Technology, Gliwice, and Silesia University, Sosnowiec, Poland e-mail: [email protected] Bo˙ zena Wieczorek Katowice School of Economics, Katowice, Poland e-mail: [email protected] Abstract A parallel simulated annealing algorithm for solving the vehicle routing problem with time windows (VRPTW) is considered. The VRPTW is a complex bicriterion optimiza- tion problem in which both the number of vehicles and the total distance traveled by vehicles should be minimized. The aim is to establish how the number of the cooling stages ex- ecuted by parallel simulated annealing processes influence the quality of solutions to the problem. Key words. Parallel simulated annealing, bicriterion optimization, vehicle routing problem with time windows 1 Introduction The vehicle routing problem with time windows (VRPTW) is a member of a large family of the vehicle rout- ing problems (VRP). In general, the VRP consist in estab- lishing a set of routes which serves a set of customers in presence of various constraints. The VRPTW is an NP- hard bicriterion optimization problem in which the number of routes (vehicles) and the total distance of routes are min- imized. These optimization criteria are hierarchical, i.e. the number of routes should be minimized in the first place. Among the solutions with the same number of routes the best solution has the minimum total distance of routes. The algorithms to solve the VRPTW can be divided into two groups: exact optimization and heuristic (or approxi- mate) algorithms. In the second group of algorithms a vari- ety of metaheuristics can be found. Among them are local search, genetic algorithms, tabu search, evolution strategies, ant colony systems, constraint programming and simulated annealing. In this work a parallel simulated annealing algorithm to solve the VRPTW is considered. The algorithm consists of two phases. The main goals of phase 1 and 2 are minimiz- ing the number of routes of the solution and the total length of these routes, respectively. To fulfill these goals the spec- ified numbers of cooling stages during each of these phases are executed. The aim of this work is to investigate how the numbers of the cooling stages influence the quality of solutions to the problem. By the quality of a solution we mean its proximity to the optimum solution. The research results presented in this paper extend the results reported in [4, 3]. Arbelaitz, Rodriguez and Zamakola apply paral- lel simulated annealing with synchronous and asynchronous communication of processes to solve the VRPTW problem [1]. Onbas ¸o˘ glu and ¨ Ozdamar present the applications of parallel simulated annealing algorithms in various global optimization problems [7]. The methods of parallelization of simulated annealing are discussed in [2]. In section 2 the problem under analysis is formulated. Section 3 describes a sequential annealing algorithm. In section 4 the parallel simulated annealing algorithm is dis- cussed. Section 5 describes the experimental results. Sec- tion 6 concludes the work. 2 Problem formulation The VRPTW is formulated as follows. There is a central depot of cargo and n customers (nodes) located at the spec- ified distances from the depot. The locations of the depot (i =0) and the customers (i =1,2,..., n), and the shortest distances d ij and the corresponding travel times t ij between any two locations i and j are given. The cargo have to be delivered to (or picked up from) each customer i according to the delivery demand q i by a fleet of vehicles. Each vehi- cle serves a subset of customers on the route which begins and ends at the depot. The vehicles have the same capac- ity Q. The total sum of demands of customers served by a vehicle on a route cannot exceed Q. For each customer a service time window [e i ,f i ] and a service time s i are de- fined. e i and f i determine, respectively, the earliest and the latest time for start servicing. The customer i is served by a single vehicle exactly once, within the time window [e i ,f i ]. The vehicle can arrive at the customer before the time win- dow but in such a case it has to wait until time e i when the Proceedings of the 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP’06) 1066-6192/06 $20.00 © 2006 IEEE
Transcript of [IEEE 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing...
![Page 1: [IEEE 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP'06) - Montbeliard-Sochaux, France (2006.02.15-2006.02.17)] 14th Euromicro](https://reader036.fdocuments.pl/reader036/viewer/2022080417/5750a1bc1a28abcf0c95d215/html5/thumbnails/1.jpg)
Solving bicriterion optimization problems by parallel simulated annealing
Zbigniew J. CzechSilesia University of Technology, Gliwice,and Silesia University, Sosnowiec, Poland
e-mail: [email protected]
Bozena WieczorekKatowice School of Economics, Katowice, Poland
e-mail: [email protected]
Abstract
A parallel simulated annealing algorithm for solving thevehicle routing problem with time windows (VRPTW) isconsidered. The VRPTW is a complex bicriterion optimiza-tion problem in which both the number of vehicles and thetotal distance traveled by vehicles should be minimized. Theaim is to establish how the number of the cooling stages ex-ecuted by parallel simulated annealing processes influencethe quality of solutions to the problem.
Key words. Parallel simulated annealing, bicriterionoptimization, vehicle routing problem with time windows
1 Introduction
The vehicle routing problem with time windows(VRPTW) is a member of a large family of the vehicle rout-ing problems (VRP). In general, the VRP consist in estab-lishing a set of routes which serves a set of customers inpresence of various constraints. The VRPTW is an NP-hard bicriterion optimization problem in which the numberof routes (vehicles) and the total distance of routes are min-imized. These optimization criteria are hierarchical, i.e. thenumber of routes should be minimized in the first place.Among the solutions with the same number of routes thebest solution has the minimum total distance of routes.
The algorithms to solve the VRPTW can be divided intotwo groups: exact optimization and heuristic (or approxi-mate) algorithms. In the second group of algorithms a vari-ety of metaheuristics can be found. Among them are localsearch, genetic algorithms, tabu search, evolution strategies,ant colony systems, constraint programming and simulatedannealing.
In this work a parallel simulated annealing algorithm tosolve the VRPTW is considered. The algorithm consists oftwo phases. The main goals of phase 1 and 2 are minimiz-ing the number of routes of the solution and the total length
of these routes, respectively. To fulfill these goals the spec-ified numbers of cooling stages during each of these phasesare executed. The aim of this work is to investigate howthe numbers of the cooling stages influence the quality ofsolutions to the problem. By the quality of a solution wemean its proximity to the optimum solution. The researchresults presented in this paper extend the results reportedin [4, 3]. Arbelaitz, Rodriguez and Zamakola apply paral-lel simulated annealing with synchronous and asynchronouscommunication of processes to solve the VRPTW problem[1]. Onbasoglu and Ozdamar present the applications ofparallel simulated annealing algorithms in various globaloptimization problems [7]. The methods of parallelizationof simulated annealing are discussed in [2].
In section 2 the problem under analysis is formulated.Section 3 describes a sequential annealing algorithm. Insection 4 the parallel simulated annealing algorithm is dis-cussed. Section 5 describes the experimental results. Sec-tion 6 concludes the work.
2 Problem formulation
The VRPTW is formulated as follows. There is a centraldepot of cargo and n customers (nodes) located at the spec-ified distances from the depot. The locations of the depot(i = 0) and the customers (i = 1, 2, . . . , n), and the shortestdistances dij and the corresponding travel times tij betweenany two locations i and j are given. The cargo have to bedelivered to (or picked up from) each customer i accordingto the delivery demand qi by a fleet of vehicles. Each vehi-cle serves a subset of customers on the route which beginsand ends at the depot. The vehicles have the same capac-ity Q. The total sum of demands of customers served by avehicle on a route cannot exceed Q. For each customer aservice time window [ei, fi] and a service time si are de-fined. ei and fi determine, respectively, the earliest and thelatest time for start servicing. The customer i is served by asingle vehicle exactly once, within the time window [ei, fi].The vehicle can arrive at the customer before the time win-dow but in such a case it has to wait until time ei when the
Proceedings of the 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP’06) 1066-6192/06 $20.00 © 2006 IEEE
![Page 2: [IEEE 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP'06) - Montbeliard-Sochaux, France (2006.02.15-2006.02.17)] 14th Euromicro](https://reader036.fdocuments.pl/reader036/viewer/2022080417/5750a1bc1a28abcf0c95d215/html5/thumbnails/2.jpg)
service can begin. The latest time for arrival of the vehicleat customer i is fi.
The objective is to find the set of routes which guaranteesthe delivery of cargo to all customers and satisfies the timewindow and vehicle capacity constraints. Furthermore, thesize of the set equal to the number of vehicles needed (pri-mary goal) and the total travel distance (secondary goal)should be minimized.
3 Sequential simulated annealing
The application of simulated annealing to solve theVRPTW is as follows. The process of simulated anneal-ing is divided into two phases. Each phase consists of somenumber of cooling stages, and each cooling stage consists ofsome number of annealing steps. The main goal of phase 1is minimizing the number of routes of the solution, whereasphase 2 minimizes the total length of these routes. Howeverit should be noted that in phases 1 and 2 both the numberof routes and the total length of routes can be reduced. Aninitial solution to the problem is found by making use ofsome heuristics. On every annealing step a neighbor solu-tion is determined by moving one or more customers amongthe routes. Generally, in simulated annealing the neighborsolutions of lower costs obtained in this way are always ac-cepted (in our algorithm almost always). The solutions ofhigher costs are accepted with the probability
e− δ
Ti (1)
where Ti, i = 0, 1, . . . , imax, is a parameter called a tem-perature of annealing, which falls from some initial valueT0 according to the formula Ti+1 = βTi, where β (β < 1)is a constant and δ denotes an increase of the solution cost.A sequence of steps for which the temperature of annealingremains constant is called a cooling stage. Equation (1) im-plies that large increases of the solution cost, so called up-hill moves, are more likely to be accepted when Ti is high.As Ti approaches zero most uphill moves are rejected. Thecost of a solution s in phase 1 of our algorithm is computedas:
cost1(s) = c1N + c2D + c3(r1 − r) (2)
and in phase 2 as:
cost2(s) = c1N + c2D (3)
where N is the number of routes in solution s (equal to thenumber of vehicles needed), D is the total travel distance ofthe routes, r1 is the number of customers in a route whichis tried to be removed, r is an average number of customersin all routes, and c1, c2, c3 are some constants. Since thebasic criterion of optimization is the number of routes, it isassumed that c1 � c2.
The quality of results generated by simulated annealingdepends heavily on the way in which a neighbor solutionof a current solution is determined. While computing thisneighbor solution we strive to assure that deep reconfigura-tions of a current solution may take place. Furthermore thiscomputation is highly probabilistic. We believe that thesetwo factors are crucial for wide exploration of the searchspace.
Sequential simulated annealing for the VRPTW:1 Create the initial solution by making use of some
heuristics;2 old solution := initial solution;3 best solution := initial solution;4 for f := 1 to 2 do {execute phase 1 and 2}
{beginning of phase f}5 T := T0,f ; {initial temperature of annealing}6 repeat {a cooling stage}7 for i := 1 to L do8 annealing stepf (old solution, best solution);9 end for;10 T := βf · T ; {temperature reduction}11 until af cooling stages are executed;
{end of phase f}12 end for;
13 procedure annealing stepf (old solution, best solution);14 Create new solution as a neighbor to old solution
(the way this step is executed depends on f );15 δ := costf (new solution)−costf (old solution);16 Generate random x uniformly in the range (0, 1);17 if (δ < 0) or (x < e−δ/T ) then18 old solution := new solution;19 if costf (new solution) < costf (best solution) then20 best solution := new solution;21 end if;22 end if;23 end annealing stepf ;
The sequential algorithm of annealing halts if a stoppingcondition is satisfied. In this work we assume that the con-dition is satisfied if a specified number of cooling stages, af ,is executed. Contrary to the classical approach in which asolution to the problem is taken as the last solution obtainedin the annealing chain, we memorize the best solution foundduring the whole annealing process (lines 19–21).
Summing up, the simulated annealing algorithm per-forms the local search by sampling the neighborhood in arandom fashion. It attempts to avoid becoming prematurelytrapped in a local optimum by accepting from time to timean inferior solution. The frequency of this acceptance de-pends on the magnitude of the increase in solution cost andon the search time to date.
Proceedings of the 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP’06) 1066-6192/06 $20.00 © 2006 IEEE
![Page 3: [IEEE 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP'06) - Montbeliard-Sochaux, France (2006.02.15-2006.02.17)] 14th Euromicro](https://reader036.fdocuments.pl/reader036/viewer/2022080417/5750a1bc1a28abcf0c95d215/html5/thumbnails/3.jpg)
The theoretical behavior of simulated annealing can bemodeled using a non-homogeneous Markov chain in whichthe probability of moving from solution (state) i to solutionj depends on i, j and the current value of the temperatureof annealing.
4 Parallel simulated annealing algorithm
The parallel simulated annealing algorithm, which wecall the algorithm of co-operating searches (CS), comprisesp processes, P1, P2, . . . , Pp. Each of them is capable of gen-erating its own annealing chain. The processes co-operatewith each other every ω step of phase 2 passing their bestsolutions found so far. The chain for the first process iscompletely independent. The chain for the second processis updated at steps uω, u = 1, 2, . . . , umax, to the bettersolution between the best solution found by the first pro-cess so far, and the realization of the last step of simulatedannealing of the second process. Similarly, the third pro-cess chooses as the next point in its chain the better solutionbetween its own and the one obtained from the second pro-cess. This means that the best solution found by process Pl
is propagated for further enhancement to processes Pl+1 . . .Pp (see below, X0 – an initial solution, Xb – the best solu-tion among processes).
X0 →
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
X(1)0 → X
(1)ω → X
(1)2ω →
↓ ↓X
(2)0 → X
(2)ω → X
(2)2ω →
↓ ↓• • •• • •
X(p−1)0 →X
(p−1)ω → X
(p−1)2ω →
↓ ↓X
(p)0 → X
(p)ω → X
(p)2ω →
⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭
→ Xb
An effort to improve by a process a solution obtained fromits neighbor can be thought of as exploitation of the searchresult, in contrast to exploration during which a process ex-amines its own search space freely. The exploitation andexploration are present in many heuristic algorithms, andthe necessity of maintaining proper balance between themis recognized in the literature.
The temperature of annealing decreases in phase 2 ac-cording to the formula Ti+1 = β2 · Ti for i = 0, 1, 2, . . . ,a2, where a2 is the number of the cooling stages. Thereare three possibilities in establishing the points in which thetemperature drops and the processes interact. Namely, onemay assume that the processes interact frequently duringeach of temperature plateaus (ω < L), that the processesinteract after executing L annealing steps (ω = L), or thatthe temperature drops several times before an interactiontakes place (ω > L). In this work the second approach is
taken, i.e. the processes interact after a cooling stage is com-pleted (ω = L). The parallel simulated annealing algorithmto solve the VRPTW written for the message passing modelof parallel computations in which the processes co-operatewhen a cooling stage is completed is shown below.
Co-operating searches:PROCESS P0:
1 Create initial solution by making use of someheuristics;
2 Send initial solution to processesPj , j = 1, 2, . . . , p;
3 Receive best local solutionj from processesPj , j = 1, 2, . . . , p;
4 Choose the best solution among best local solutionj,j = 1, 2, . . . , p, and produce it as the solutionto the VRPTW;
PROCESSES Pj , j = 1, 2, . . . , p:5 Receive initial solution from P0;6 old solutionj := initial solution;7 best local solutionj := initial solution;8 Execute phase 1 of simulated annealing;
{beginning of phase 2}9 T := T0,2; {initial temperature of annealing}10 repeat11 for i := 1 to L do12 annealing step2(old solutionj ,
best local solutionj);13 end for;14 if j = 1 then Send best local solution1
to process P2;15 else {j > 1}16 receive best local solutionj−1 from
process Pj−1;17 if cost2(best local solutionj−1) <
cost2(best local solutionj) then18 best local solutionj := best local solutionj−1;19 end if;20 if j < p then Send best local solutionj
to process Pj+1; end if;21 end if;22 T := β2 · T ; {temperature reduction}23 until a2 cooling stages are executed;
{end of phase 2}24 Send best local solutionj to P0;
5 Experimental results
The parallel CS algorithm was serialized and imple-mented using C language. The goal of this modification was
Proceedings of the 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP’06) 1066-6192/06 $20.00 © 2006 IEEE
![Page 4: [IEEE 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP'06) - Montbeliard-Sochaux, France (2006.02.15-2006.02.17)] 14th Euromicro](https://reader036.fdocuments.pl/reader036/viewer/2022080417/5750a1bc1a28abcf0c95d215/html5/thumbnails/4.jpg)
to allow the execution of the parallel algorithm on a singleprocessor. In the computing centers in which the computa-tions were carried out, a number of processors in use waslimited to a few processors per user. This would preventthe execution of the algorithm for the larger number of pro-cesses (say p = 20), if the parallel algorithm was used. Theserial algorithm was implemented with the following valuesof parameters: c1 = 40000, c2 = 1, c3 = 50, L = 100000,50000, 33333 and 25000 (depending on the number of pro-cesses, p, in use), a1 = 20, 30, 40 and 50, a2 = 100, 120,140, 160, 180 and 200, β1 = 0.95, β2 = 0.98. The initialtemperature of annealing, T0,f , was computed at the begin-ning of each annealing phase. To this goal, the procedurefinding a neighbor solution was executed a specified num-ber of times and the average increase of the solution cost,G, was computed. The initial temperature, T0,f , was fixedin such a way that the probability of worsening the solutioncost by G in the first annealing step, e−G/T0,f , was equal tosome predefined constant (in our case 0.01).
The computational experiments were conducted on thebenchmarking tests proposed by Solomon [6]. Overall threemajor sets, R, C and RC, were elaborated. The geographi-cal data for customers in sets R, C and RC were generatedrandomly, in a clustered fashion, and as a mix of randomand clustered structures, respectively. Each of these majorsets was divided into two subsets, R1, R2, C1, C2 and RC1,RC2. The sets R1, C1 and RC1 have a short schedulinghorizon, so their solutions consists of relatively large num-bers of routes (between 9 and 19). A scheduling horizonfor tests R2, C2 and RC2 is longer therefore their solutionscontain less routes (between 2 and 4). Every test instanceomprises 100 customers and the distances between them aremeasured using Euclidean metric assuming that travel timesequal the corresponding distances. Our experiments werecarried out on the R108, R112 and R104 test instances. Itfollows from our experience that because of random loca-tions of customers and tightness of time windows, the setR1 is the hardest to solve among the six test sets character-ized above.
In Table 1 the experimental results for the CS algorithmrun with parameters a1 = 20...50, a2 = 100 and the R108test instance are shown. The values in each row of the table(and all tables which follow) were computed in 500 exper-iments. A single experiment consisted in creation an initialsolution to the VRPTW by making use of some heuristics.Then this solution was improved in a chain of simulatedannealing steps executed by a given number of parallel pro-cesses. In order to ensure that the processes explore theparts of the search space of roughly the same size, we de-creased the length of annealing chains while the number ofprocesses grew up. For the numbers of processes p = 5,10, 15 and 20, the numbers of annealing steps were set toL = 100000, 50000, 33333 and 25000, respectively. This
means that in each execution of the CS algorithm overall500000 annealing steps were performed by all the processesin a single cooling stage. The columns of the tables pre-sented in the sequel contain: p – number of processes, a1,a2 – numbers of cooling stages executed in phase 1 and 2of the CS algorithm, respectively, wm – number of solutionswith the minimum number of routes (e.g. 9 for the R108 testinstance), H – number of hits into the best solution found(e.g. 〈9, 960.87528〉 for the R108 test instance, where 9 isthe number of routes and 960.87528 is the total distanceof these routes; this result is also the best known reportedin the literature), y – mean value of total distances for so-lutions with the minimum number of routes, s – standarddeviation of total distances. It can be seen from Table 1 thatall values of wm are well above 400 (in 500 experiments)what means that the R108 test instance is relatively easy tosolve with respect to finding the solutions with the mini-mum number of routes. If the number of cooling stages inphase 1 increases from a1 = 20 to a1 = 50, it essentiallydoes not influence the values of wm. However these val-ues grow up significantly if the number of cooling stagesin phase 2, a2, increases (Table 2). For example, sum-ming up values wm for a1 = 50 and a2 = 100, we get:∑
wm = 464 + 478 + 481 + 461 = 1884, and for a1 = 50and a2 = 200:
∑wm = 499 + 498 + 497 + 497 = 1991.
Thus, the larger a2 the higher probability of achieving solu-tions with the minimum number of routes. The larger valuesof a2 are also favorable with respect to the number of hitsinto the best solution. For a1 = 50 and a2 = 100, we get:∑
H = 2+5+8+6 = 21, and for a1 = 50 and a2 = 200:∑H = 16 + 19 + 15 + 18 = 68. We may also test sta-
tistically whether larger values of a2 improve the quality ofsolutions with respect to the total distance traveled by thevehicles. To this goal, by making use of the mean values, y,and standard deviations, s, from Table 2 let us test the hy-potheses H0 : μV ≤ μW versus the alternative hypothesesHa : μV > μW (μ denotes the mean value of the populationof the total routes distances, V – the results of experimentswith a2 = 120, 140, 160 and 180, W – the results of ex-periments with a2 = 200). In all cases for which H0 arerejected we can claim that the numbers of cooling stagesa2 = 120, 140, 160 and 180, respectively, give inferior so-lutions in comparison to the value a2 = 200. Using the teststatistics:
Z =yV − yW√
s2V
n1+ s2
W
n2
we reject H0 at the α = 0.01 significance level if Z >Z0.01 = 2.33 (in our experiments n1 = n2 = 500). Thecalculated values of the test statistics for data from Table 2are shown in Table 3. The case for which H0 is rejectedis framed. It can be seen that executing a2 = 200 coolingstages in phase 2 of the CS algorithm is favorably to the casewhen a2 = 120 only for the number of processes p = 5. For
Proceedings of the 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP’06) 1066-6192/06 $20.00 © 2006 IEEE
![Page 5: [IEEE 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP'06) - Montbeliard-Sochaux, France (2006.02.15-2006.02.17)] 14th Euromicro](https://reader036.fdocuments.pl/reader036/viewer/2022080417/5750a1bc1a28abcf0c95d215/html5/thumbnails/5.jpg)
the remaining cases, a2 = 140, 160 and 180, the values ofthe test statistics show that it cannot be claimed that thesenumbers of cooling stages give inferior results as comparedto a2 = 200. However, the data in Table 4a (gathered fromTable 2) implies that smaller values of the mean values oftotal distances of routes, y, are obtained for larger a2.
p a1 wm H y s5 20 442 1 973.23 7.20
10 20 495 3 969.81 5.4015 20 500 5 968.06 4.3620 20 476 5 969.63 6.37
5 30 448 8 972.63 6.7810 30 457 14 972.24 7.0615 30 445 6 972.01 6.6320 30 449 6 972.86 7.52
5 40 478 9 972.64 6.9210 40 464 9 972.20 7.2215 40 467 10 972.38 6.8320 40 462 10 972.47 7.45
5 50 464 2 972.28 6.9210 50 478 5 972.03 7.0115 50 481 8 971.83 7.2020 50 461 6 972.37 7.52
Table 1. Results for CS algorithm and R108test instance, a1 = 20...50, a2 = 100
The results of execution of the CS algorithm for the testinstance R112 show that the numbers of solutions with theminimum numbers of routes, wm, grow up as the numberof cooling stages executed in phase 1, a1, increases (Ta-ble 5). The values of wm do not change substantially whenthe number of cooling stages executed in phase 2, a2, in-creases from 120 to 200 (Table 6). These values are equalaround 30 and are distinctly lower than those for the R108test instance. Thus, the R112 test instance is harder to solvewith respect to obtaining the minimum number of routes ascompared to the test instance R108. The best solution forthe R112 test, 〈9, 982.13919〉, which is equal to the best so-lution known in the literature, was hit only 13 times among18000 experiments. Table 4b shows the numbers of coolingstages executed in phase 2 which give the minimum valuesof y for data from Table 6. Table 4b suggests that there isdesirable to execute more cooling stages in phase 2 in orderto obtain lower mean values of total distances of routes, y.
Our experiments showed that even harder to solve is thetest instance R104 For this test the best solution found,〈9, 1007.31005〉, was slightly worse than the best one re-ported in the literature, 〈9, 1007.24〉. As the number ofcooling stages executed in phase 1, a1, increases, the num-bers of solutions with the minimum numbers of routes, wm,
p a2 wm H y s5 120 498 9 969.54 6.06
10 120 498 8 969.80 6.5215 120 495 8 969.20 6.5020 120 500 12 969.61 6.435 140 498 12 968.84 5.92
10 140 497 9 969.40 6.0915 140 498 12 969.17 6.2320 140 496 14 968.80 6.275 160 500 15 968.60 6.13
10 160 500 15 968.05 5.4215 160 499 23 967.85 5.3620 160 497 11 968.58 6.045 180 499 14 968.57 6.12
10 180 499 30 968.07 6.0015 180 500 14 968.25 5.9020 180 498 12 968.78 6.255 200 499 16 968.41 5.69
10 200 498 19 969.04 6.3615 200 497 15 968.82 6.5520 200 497 18 968.80 6.48
Table 2. Results for CS algorithm and R108test instance, a1 = 50, a2 = 120...200
grow up slowly (Table 7). However only a few such so-lutions were found in 500 experiments. For this reasonone cannot assess statistically how the number of coolingstages executed in phase 2, a2, influences the total distanceof routes (Table 8). It seems that while solving the test in-stance R104, it may be profitable to increase the number ofcooling stages executed in phase 1, a1, above 50.
As already mentioned the test instances for which theexperiments were conducted had various difficulty in termsof solving them. The difficulty of a test instance can bemeasured by the following factors: Pr1 — the probabilitythat after execution of the parallel CS algorithm, a solutionwith the minimum number of routes is found, Pr2 — theprobability that a total length of routes of that solution isnot worse than by 1% with respect to the shortest lengthachieved in all the experiments, and Δ = (y − ymin)/ymin
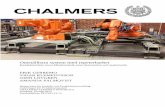
— the relative shift of the mean value of total distances fromthe minimum value. In Table 9 the test instances of the R1set are sorted by these factors. In order to explain why theR104 test is the hardest and R101 the easiest to solve, wedetermined the numbers of time windows which are openedduring the whole service. The time window of the depot forthe tests in set R1 is [0, 230] and the time windows of all thecustomers are contained within that window. It can be seenin Figure 1 that the numbers of open time windows observedduring the span of service are much higher for the R104 test
Proceedings of the 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP’06) 1066-6192/06 $20.00 © 2006 IEEE
![Page 6: [IEEE 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP'06) - Montbeliard-Sochaux, France (2006.02.15-2006.02.17)] 14th Euromicro](https://reader036.fdocuments.pl/reader036/viewer/2022080417/5750a1bc1a28abcf0c95d215/html5/thumbnails/6.jpg)
Number of Number of cooling stages, a2
processes, p 120 140 160 1805 3.04 1.19 0.51 0.44
10 1.87 0.92 −2.63 −2.4715 0.91 0.87 −2.56 −1.4620 2.00 0.00 −0.55 −0.04
Table 3. Test statistic values for comparisonthe cases a2 = 120, 140, 160 and 180 againstthe case a2 = 200
a) test instance R108
Number ofprocesses, p a2 ymin
5 200 968.4110 160 968.0515 160 967.8520 160 968.58
b) test instance R112
Number ofprocesses, p a2 ymin
5 180 1002.7510 140 1000.7215 200 1001.9420 180 1001.70
Table 4. Numbers of cooling stages executedin phase 2, a2 = a2, for which the minimumof mean values of total distances of routes,y = ymin, were obtained
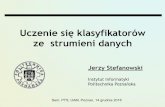
than for the R101 test. This indicates that the R104 test is“less constrained” and therefore its search space is largerthan that of the R101 test. As a consequence it is muchharder to find good solutions in such a large search space.Furthermore, the time windows of all customers in the R101test are narrow, and have the relative width 10/230 ≈ 0.04.In contrast, in the R104 test 25 windows are narrow whereasthe remaining, of the relative width around 0.8, are wide.While constructing the set of routes it is difficult to preservethe narrow time windows. Figure 2 shows that there is arelatively large number of such narrow time windows in theR104 test, what adds to the difficulty of this test1.
1The maximum numbers of open narrow time windows — 6 and 15 forthe tests R104 and R101, respectively — determine the lower bounds ofroutes in solutions for these tests. In fact, the numbers of routes in the bestsolutions for the tests R104 and R101 were 9 and 19.
p a1 wm H y s5 20 4 0 1014.56 13.35
10 20 3 0 1007.30 9.5115 20 3 0 1004.63 13.4720 20 4 0 1001.85 9.625 30 11 0 1006.06 9.86
10 30 10 1 997.73 9.6115 30 15 0 1005.69 14.1620 30 12 1 1005.03 13.125 40 24 0 1003.87 8.28
10 40 21 0 999.65 10.1615 40 23 0 1009.52 9.6220 40 27 1 1004.59 10.555 50 38 0 1006.73 11.99
10 50 40 0 1008.09 13.8615 50 39 2 1005.49 10.9720 50 35 0 1005.04 11.59
Table 5. Results for CS algorithm and R112test instance, a1 = 20...50, a2 = 100
6 Conclusions
The parallel simulated annealing algorithm of co-operating processes to solve the VRPTW problem was in-vestigated on some of the tests from set R1 proposed bySolomon [6]. Although all these tests are instances of theNP-hard problem, we found that they differ substantially indifficulty. The experiments showed that the test instancesR104 and R112 were quite hard whereas R108 was mucheasier to solve. In order to achieve good results for theharder tests, like R104 and R112, some special efforts arerequired, e.g. one may execute larger numbers of coolingstages, a1 and a2, or choose a suitable frequency of pro-cesses co-operation. The results in Table 10 indicate thatlarger values of parameters a1 and a2 improve the numbersof solutions with the minimum number of routes, wm, forthe R112 test instance. However, the wm values for theR104 test instance are still unsatisfactory. Some results onchoosing a suitable frequency of processes co-operation arereported in [5].
Acknowledgements
We thank Piotr Czarnas and Przemyslaw Gocyla fortheir contributions to this work. We also thank the fol-lowing computing centers where the computations of ourproject were carried out: Academic Computer Centre inGdansk TASK, Academic Computer Centre CYFRONETAGH, Krakow (computing grants 027/2004 and 069/2004),
Proceedings of the 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP’06) 1066-6192/06 $20.00 © 2006 IEEE
![Page 7: [IEEE 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP'06) - Montbeliard-Sochaux, France (2006.02.15-2006.02.17)] 14th Euromicro](https://reader036.fdocuments.pl/reader036/viewer/2022080417/5750a1bc1a28abcf0c95d215/html5/thumbnails/7.jpg)
p a2 wm H y s5 120 21 0 1005.07 13.82
10 120 35 0 1003.16 12.7615 120 29 1 1008.81 13.9220 120 34 0 1006.65 13.305 140 32 0 1005.60 11.29
10 140 34 0 1000.72 9.0315 140 37 0 1006.64 14.0920 140 30 1 1002.28 9.985 160 33 0 1008.32 10.37
10 160 31 0 1005.20 11.0315 160 38 0 1007.88 11.6520 160 40 1 1003.79 12.985 180 29 1 1002.75 10.27
10 180 31 0 1004.69 11.4315 180 32 0 1007.11 14.6820 180 36 1 1001.70 10.565 200 31 0 1003.29 11.08
10 200 34 1 1004.20 11.2015 200 31 0 1001.94 10.3720 200 31 2 1005.10 12.12
Table 6. Results for CS algorithm and R112test instance, a1 = 50, a2 = 120...200
Poznan Supercomputing and Networking Center, Interdis-ciplinary Centre for Mathematical and Computational Mod-elling, Warsaw University (computing grant G27-9), Wro-claw Centre for Networking and Supercomputing (comput-ing grant 04/97). The research of this project was supportedby the State Committee for Scientific Research grants 3T11F 00429 and BK-239/RAu2/2005.
References
[1] Arbelaitz. O., Rodriguez, C., Zamakola. I., Low costparallel solutions for the VRPTW optimization prob-lem, Proc. of the Intern. Conf. on Parallel ProcessingWorkshops, (2001).
[2] Azencott, R., (Ed.), Simulated annealing. Paralleliza-tion techniques, J. Wiley, NY, (1992).
[3] Czarnas, P., Czech, Z.J., Gocyla, P., Parallel simu-lated annealing for bicriterion optimization problems,Proc. of the 5th International Conference on Paral-lel Processing and Applied Mathematics (PPAM’03),(September 7–10, 2003), Czestochowa, Poland, 233–240.
[4] Czech, Z.J., Czarnas, P., A parallel simulated anneal-ing for the vehicle routing problem with time win-
p a1 wm H y s5 20 - - - -
10 20 - - - -15 20 - - - -20 20 - - - -
5 30 - - - -10 30 2 2 1007.31 0.0015 30 - - - -20 30 1 0 1018.07 0.00
5 40 1 0 1015.51 0.0010 40 3 1 1013.63 4.5915 40 - - - -20 40 2 1 1010.22 2.91
5 50 5 1 1015.18 4.7410 50 1 1 1007.31 0.0015 50 3 2 1013.22 8.3620 50 1 1 1007.31 0.00
Table 7. Results for CS algorithm and R104test instance, a1 = 20...50, a2 = 100 (“-” de-notes that solutions with the minimum num-ber of routes were not found)
dows, Proc. 10th Euromicro Workshop on Parallel,Distributed and Network-based Processing, Canary Is-lands, Spain, (January, 2002), 376–383.
[5] Czech, Z.J., Wieczorek, B., Frequency of co-operationof parallel simulated annealing processes, Proc. ofthe 6th International Conference on Parallel Process-ing and Applied Mathematics (PPAM’05), (Septem-ber 11–14, 2005), Poznan, Poland (in print).
[6] Solomon, M.M., Algorithms for the vehicle rout-ing and scheduling problems with time window con-straints, Operations Research 35, (1987), 254–265,see also http://w.cba.neu.edu/˜msolomon/problems.htm.
[7] Onbasoglu, E., Ozdamar, L., Parallel simulated an-nealing algorithms in global optimization, Journal ofGlobal Optimization 19: 27–50, 2001.
Proceedings of the 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP’06) 1066-6192/06 $20.00 © 2006 IEEE
![Page 8: [IEEE 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP'06) - Montbeliard-Sochaux, France (2006.02.15-2006.02.17)] 14th Euromicro](https://reader036.fdocuments.pl/reader036/viewer/2022080417/5750a1bc1a28abcf0c95d215/html5/thumbnails/8.jpg)
p a2 wm H y s5 120 2 1 1010.22 2.91
10 120 4 3 1008.76 2.5215 120 2 1 1010.22 2.9120 120 3 3 1007.31 0.00
5 140 2 1 1009.17 1.8610 140 2 0 1014.55 3.5215 140 - - - -20 140 2 1 1011.41 4.10
5 160 1 0 1011.04 0.0010 160 3 0 1015.74 3.9415 160 1 1 1007.31 0.0020 160 1 0 1019.98 0.00
5 180 1 1 1007.31 0.0010 180 2 1 1011.41 4.1015 180 2 1 1012.69 5.3820 180 2 1 1011.09 3.78
5 200 1 0 1011.04 0.0010 200 - - - -15 200 2 0 1015.37 2.2520 200 1 0 1018.07 0.00
Table 8. Results for CS algorithm and R104test instance, a1 = 50, a2 = 120...200
Test Pr1 Pr2 ΔR104 0.004 0.73 0.57R112 0.08 0.12 2.47R110 0.56 0.44 1.63R111 0.66 0.75 0.83R109 0.72 0.69 0.81R107 0.92 0.64 0.81R103 0.92 0.98 0.50R108 0.94 0.50 1.17R106 1.00 0.91 0.57R102 1.00 1.00 0.38R105 1.00 1.00 0.24R101 1.00 1.00 0.14
Table 9. Test instances of set R1 sorted byfactors Pr1, Pr2 and Δ
R104
64.5
R1014.3
0 50 100 150 200
0
20
40
60
80
Time
A
Figure 1. Number of open time windows, A,vs. time (horizontal lines denote the aver-ages)
1.1
0 50 100 150 200
0
2
4
6
Time
B
Figure 2. Number of open narrow time win-dows (of relative width 0.04), B, vs. time forR104 test instance
R112p wm H y s5 54 0 1004.37 12.11
10 45 1 1004.82 12.4215 46 1 1008.67 13.8520 46 0 1004.96 12.14
R104p wm H y s5 5 2 1012.07 4.32
10 1 1 1007.31 0.0015 5 4 1008.95 3.2820 1 1 1007.31 0.00
Table 10. Results for CS algorithm and R112and R104 test instances, a1 = 100, a2 = 400
Proceedings of the 14th Euromicro International Conference on Parallel, Distributed, and Network-Based Processing (PDP’06) 1066-6192/06 $20.00 © 2006 IEEE







![5R]SRF]Û R VLÛ J RVRZDQLH Z UDPDFK · 2019. 10. 14. · p\ z srsu]hgqlhm f]Û fl 1rzr- flÇ mhvw j rvrzdqlh qd pd h surmhnw\ vsr hf]qh wxwdm wdn >h gr g\vsr]\fml pdp\ j rv %dug]r](https://static.fdocuments.pl/doc/165x107/609ec7b158fe161d4670caba/5rsrf-r-vl-j-rvrzdqlh-z-udpdfk-2019-10-14-p-z-srsuhgqlhm-f-fl-1rzr-.jpg)








![1'$5,80.$/(1'$5,80 - Nasza Gmina Ogrodzieniec · 2017. 6. 23. · 6wu 7deru zlhuqr ü vdphm sudzg]lh l zuhv]flh plár ü nwyu pdp\ gr %rjd l gr guxjlhjr f]árzlhnd %r qlh gd vl sudzg\](https://static.fdocuments.pl/doc/165x107/60ca05b3d31bae6a76493f7e/15801580-nasza-gmina-ogrodzieniec-2017-6-23-6wu-7deru-zlhuqr-.jpg)