gruparectan · Kratownica Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą...
22
gruparectan.pl Strona:1 1. Kratownica Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów 2. Szkic projektu 3. Ustalenie warunku statycznej niewyznaczalności układu Warunek konieczny geometrycznej niezmienności i statycznej wyznaczalności kratownicy o strukturze prostej: p=2w-r gdzie: p= liczba prętów kratownicy w= liczba węzłów kratownicy r= liczba stopni swobody odbieranych przez podpory Kratownica: warunek: 7=7, warunek jest spełniony
Transcript of gruparectan · Kratownica Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą...

gruparectan.pl
Strona:1
1. Kratownica
Dla danej kratownicy wyznaczyć siły we wszystkich prętach metodą równoważenia węzłów
2. Szkic projektu
3. Ustalenie warunku statycznej niewyznaczalności układu
Warunek konieczny geometrycznej niezmienności i statycznej wyznaczalności kratownicy o strukturze prostej:
p=2w-r
gdzie:
p= liczba prętów kratownicy
w= liczba węzłów kratownicy
r= liczba stopni swobody odbieranych przez podpory
Kratownica:
warunek: 7=7, warunek jest spełniony

gruparectan.pl
Strona:2
4. Obliczenie kątów nachylenia prętów do osi X wariant z sin i cos
Pręt Nr 2-5=45°
Pręt Nr 1-2=(-45)°

gruparectan.pl
Strona:3
5. Wyznaczenie Reakcji Podporowych
siły i reakcje będziemy przyjmować za dodatnie, gdy są skierowane zgodnie z układem osi XY
siły i reakcje będziemy przyjmować za ujemne, gdy są skierowane niezgodnie z układem osi XY
siły i reakcje będziemy rzutować na oś X i oś Y wyliczając odpowiednie składowe rzutów
gdzie β to kąt zawarty pomiędzy siłą lub reakcją a osią X na podstawie tego kąta można określić zwrot siły lub
reakcji
.................................................................................................................................................................
Uwalniamy daną kratownicę od więzów i wyznaczamy reakcje podporowe.
Ogólne warunki równowagi
.................................................................................................................................................................
suma wszystkich momentów od składowych reakcji i obciążeń siłowych w punkcie, w którym Moment = 0
przyjmujemy punkt, w którym znajduje się podpora przegubowa, w tym punkcie Moment = 0
.................................................................................................................................................................
suma wszystkich składowych reakcji i obciążeń siłowych rzutowana na oś X
.................................................................................................................................................................

gruparectan.pl
Strona:4
suma wszystkich składowych reakcji i obciążeń siłowych rzutowana na oś Y
6. Szkic projektu
7. Sprawdzenie Reakcji Podporowych
Sprawdzenia poprawności wyznaczenia reakcji podporowych dokonamy w punkcie [(-1);(-1)] w naszym układzie
XY
(Punkt musi być tak dobrany, aby wszystkie siły i reakcje brały udział w obliczaniu Sumy Momentów )
W punkcie tym Suma Momentów od wszystkich sił i reakcji powinna wynosić M=0
suma wszystkich momentów od składowych reakcji i obciążeń siłowych w punkcie, w którym Moment = 0

gruparectan.pl
Strona:5
8. Sprawdzenie Reakcji Podporowych Rzut X
9. Sprawdzenie Reakcji Podporowych Rzut Y
10. Obliczenie kątów nachylenia prętów do osi X wariant z tan
Xb-Xa i Yb-Ya to różnica pomiędzy współrzędnymi końca pręta
Pręt Nr 0-2=0°
Pręt Nr 2-3=90°
Pręt Nr 1-3=0°
Pręt Nr 1-0=(-90)°

gruparectan.pl
Strona:6
Pręt Nr 3-5=0°
Pręt Nr 2-5=45°
Pręt Nr 1-2=(-45)°
11. Obliczenie sił w Prętach
Aby Węzeł był w równowadze to suma jego składowych sił i reakcji rzutowana na oś X i oś Y musi być równa zero
To suma sił prętowych rzutowana na oś X w Węźle.
To suma reakcji podporowych rzutowana na oś X w Węźle - jeżeli jest istnieje.
To suma odziaływania zewnętrznego rzutowana na oś X w Węźle - jeżeli jest przyłożona.
To suma sił prętowych rzutowana na oś Y w Węźle.
To suma reakcji podporowych rzutowana na oś Y w Węźle - jeżeli jest istnieje.
To suma odziaływania zewnętrznego rzutowana na oś Y w Węźle - jeżeli jest przyłożona.
Obliczenia rozpoczynamy od Węzła, dla którego liczba niewiadomych sił w Prętach jest najmniejsza i wynosi
maksymalnie 2
.................................................................................................................................................................

gruparectan.pl
Strona:7
Wybrano Węzeł =0
Rzutowanie na oś X
Rzutowanie na oś Y
Układ równań
.................................................................................................................................................................
.................................................................................................................................................................
gruparectan.pl
Strona:8
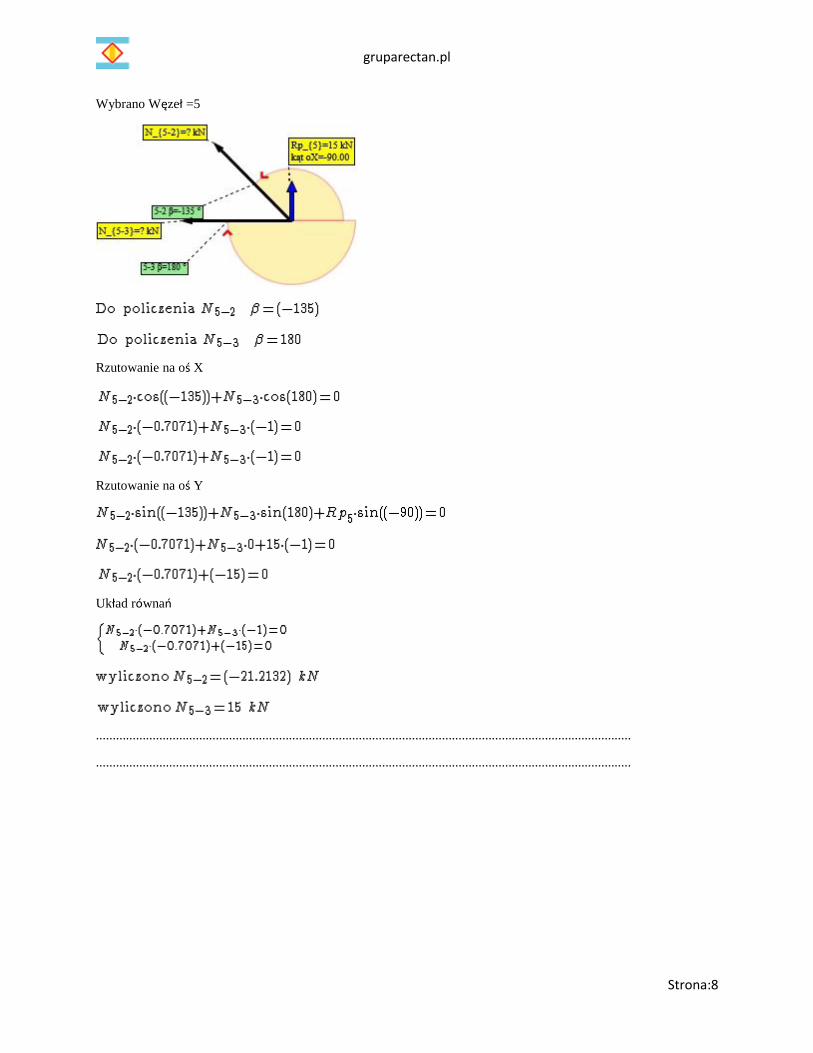
Wybrano Węzeł =5
Rzutowanie na oś X
Rzutowanie na oś Y
Układ równań
.................................................................................................................................................................
.................................................................................................................................................................

gruparectan.pl
Strona:9
Wybrano Węzeł =1
Rzutowanie na oś X
Rzutowanie na oś Y
Układ równań
.................................................................................................................................................................
.................................................................................................................................................................

gruparectan.pl
Strona:10
Wybrano Węzeł =2
Rzutowanie na oś X
Rzutowanie na oś Y
równanie
lub równanie
.................................................................................................................................................................

gruparectan.pl
Strona:11
12. Szkic projektu
Tabela 1 Siły Prętowe
Pręt N [kN] kąt [ °] L [m] funkcja
0-2 -20.0000 0.0000 1.0000 ściskany
2-3 0.0000 90.0000 1.0000 jest zerowy
1-3 15.0000 0.0000 1.0000 rozciągany
0-1 0.0000 90.0000 1.0000 jest zerowy
3-5 15.0000 0.0000 1.0000 rozciągany
2-5 -21.2132 45.0000 1.4142 ściskany
1-2 7.0711 -45.0000 1.4142 rozciągany

gruparectan.pl
Strona:12
13. Obliczenie sił w Prętach Metodą Rittera
Punkt Rittera jest to punkt w którym przecinają się linie działania pozostałych dwóch sił. W naszym przypadku
oznaczono je żółtym prostokątem.
Wyliczając Moment Statyczny w Punkcie Rittera od sił i reakcji należących do odciętej części Kratownicy
redukujemy w równaniach te niewiadome siły które się przecinają, ponieważ ramię działania momentu tych sił
wynosi zero.
Odcięta Kratownica jest w równowadze kiedy suma jej składowych sił i reakcji rzutowana na oś X i oś Y jest równa
zero.
.................................................................................................................................................................
.................................................................................................................................................................
gdzie:
To suma sił odciętej kratownicy rzutowana na oś X.
To suma reakcji podporowych odciętej kratownicy rzutowana na oś X - jeżeli reakcje należą do części.
To suma odziaływania zewnętrznego odciętej kratownicy rzutowana na oś X - jeżeli siły są przyłożone do części.
To suma sił prętowych odciętej kratownicy rzutowana na oś Y.
To suma reakcji podporowych odciętej kratownicy rzutowana na oś Y - jeżeli reakcje należą do części.
To suma odziaływania zewnętrznego odciętej kratownicy rzutowana na oś Y - jeżeli siły są przyłożone do części.
.................................................................................................................................................................

gruparectan.pl
Strona:13
Wybrano Przecięcie =0
W tym przypadku są dwa punkty Rittera i do policzenia sił należy rozwiązać układ równań:
1: Suma Momentu Statycznego względem punktu Rittera
2: Rzutując niewiadome siły oraz oddziaływania P na oś X
3: Rzutując niewiadome siły oddziaływania P na oś Y
Oczywiste jest że wyznaczenie siły w pręcie nie przecinającym się w punkcie Rittera jest natychmiastowe ponieważ
tylko ta siła tworzy równanie z jedną niewiadomą
Moment względem Punktu Rittera [0;1]

gruparectan.pl
Strona:14
Moment względem Punktu Rittera [1;0]
Moment względem Punktu Rittera [0;0]
Rzutowanie na oś X
Rzutowanie na oś Y
.................................................................................................................................................................

gruparectan.pl
Strona:15
Wybrano Przecięcie =1
W tym przypadku są trzy punkty Rittera i do policzenia sił należy rozwiązać pojedyncze równanie:
1: Suma Momentu Statycznego względem punktu Rittera nr.1
2: Suma Momentu Statycznego względem punktu Rittera nr.2
3: Suma Momentu Statycznego względem punktu Rittera nr.3
Oczywiste jest że wyznaczenie siły w pręcie nie przecinającym się w punkcie Rittera jest natychmiastowe ponieważ
tylko ta siła tworzy równanie z jedną niewiadomą.
Wygodnie jest policzyć od razu ramię działania siły nieznanej ze wzoru na przekątną trójkąta prostokątnego.
Gdzie bokami trójkąta są różnice współrzędnych X i Y pomiędzy Punktem Rittera a danym punktem siły szukanej.
I jeżeli siła prętowa nie działa pod kątem prostym to cosinus kąta działania siły jest pomiędzy prętem a rzutem
prostopadłym na kierunek prostej ramienia.
Oczywiście można również obliczyć moment tej siły obliczając jej składowe względem osi X i względem osi Y.

gruparectan.pl
Strona:16
Moment względem Punktu Rittera [1;1]
.................................................................................................................................................................
Moment względem Punktu Rittera [1;0]
.................................................................................................................................................................
Moment względem Punktu Rittera [2;1]
.................................................................................................................................................................

gruparectan.pl
Strona:17
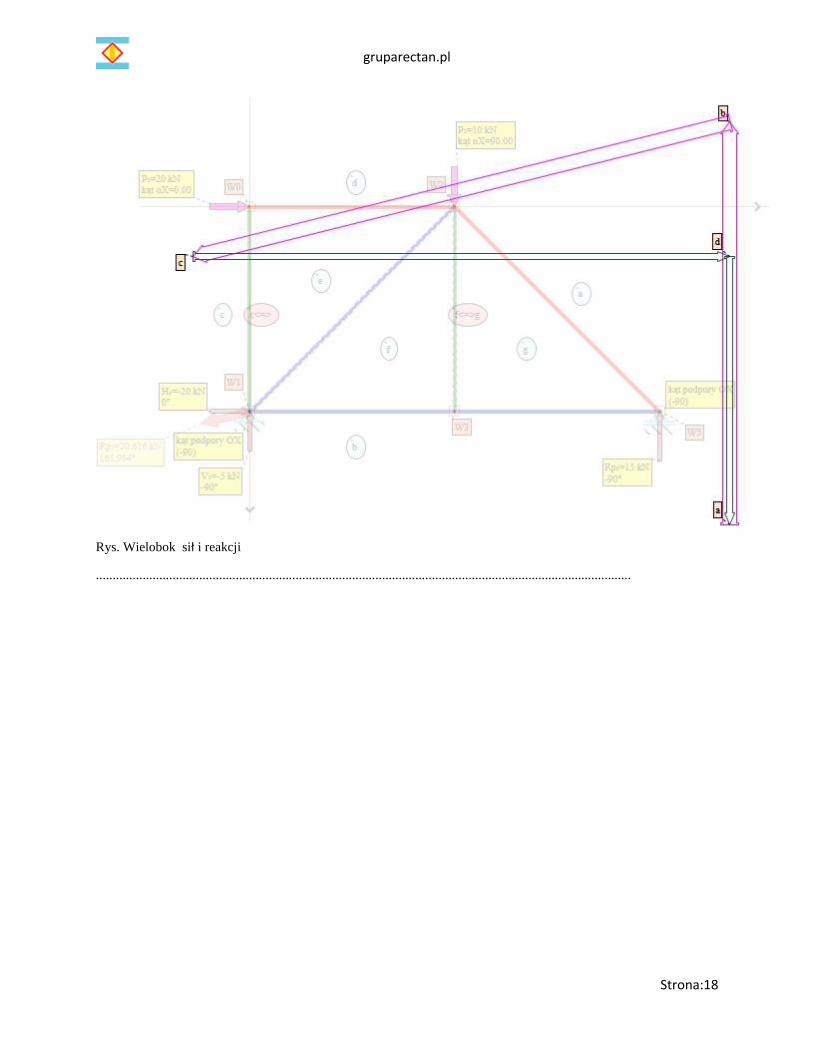
14. Obliczenie sił w Prętach Metodą Cremony
grot wektora jest oznaczony numerem pręta, pokazane są tylko pierwsze wektory iteracji
(wektor drugiej iteracji będzie miał oczywiście zwrot przeciwny do pierwszego )
Obliczamy reakcje podporowe kratownicy i rysujemy wielobok sił i reakcji
Porządek rysowania przyjmujemy zgodnie z ruchem wskazówek zegara
Rys. Plan Maxwell
gruparectan.pl
Strona:18
Rys. Wielobok sił i reakcji
.................................................................................................................................................................

gruparectan.pl
Strona:19
Wybrano Węzeł =0

gruparectan.pl
Strona:20
Wybrano Węzeł =5

gruparectan.pl
Strona:21
Wybrano Węzeł =1
.................................................................................................................................................................

gruparectan.pl
Strona:22
Rys. Wykres Cremony
.................................................................................................................................................................
Aby określić wartości sił należy porównać wykreślone wektory sił ze skalownikiem
.................................................................................................................................................................
.................................................................................................................................................................
Wydruk wygenerowany w programie Kratos
Copyright © 2018 Grupa Rectan