Generowanie fotomapy i ortofotomapy ze zdj ę lotniczego z...
16
Generowanie fotomapy i ortofotomapy ze zdjęcia lotniczego z wykorzystaniem oprogramowania ILWIS 2008-11-25 _________________________________________________________________________________ Lukasz Kulesza, modyfikacja Beata Hejmanowska, Andrzej Wróbel Generowanie fotomapy i ortofotomapy ze zdjęcia lotniczego z wykorzystaniem oprogramowania ILWIS Spis treści 1. Cel ćwiczenia i wykaz danych 2. Wprowadzenie do ILWIS-a i zapoznanie się z danymi 3. Generowanie fotomapy, przetwarzanie rzutowe 4. Przyklady fotomap 5. Generowanie ortofotomapy 6. Zawartość sprawozdania 7. Zalączniki 1. Cel ćwiczenia Poznanie procesu rektyfikacji zdjęć lotniczych. Pokazanie róŜnicy pomiędzy przetwarzaniem rzutowym które jest moŜliwe dla terenów plaskich a ortorektyfikacją uwzględniająca rzeźbę terenu. Dane • Zeskanowane zdjecie w skali 1:13000: zdjecie • Protokól kalibracji kamery (metryka_kamery-RC30.TXT) (zal. 3) • NMT: nmtropsim • Punkty osnowy fotogrametrycznej (wspólrzędne w ukladzie 1992, powiększenia) (zal. 1 i 2) • Dane do weryfikacji dokladności (plik wektorowy drogi_77)
Transcript of Generowanie fotomapy i ortofotomapy ze zdj ę lotniczego z...
-
Generowanie fotomapy i ortofotomapy ze zdjęcia lotniczego z wykorzystaniem oprogramowania ILWIS 2008-11-25 _________________________________________________________________________________
Łukasz Kulesza, modyfikacja Beata Hejmanowska, Andrzej Wróbel
Generowanie fotomapy i ortofotomapy ze zdj ęcia lotniczego z wykorzystaniem oprogramowania ILWIS
Spis tre ści
1. Cel ćwiczenia i wykaz danych
2. Wprowadzenie do ILWIS-a i zapoznanie się z danymi
3. Generowanie fotomapy, przetwarzanie rzutowe
4. Przykłady fotomap
5. Generowanie ortofotomapy
6. Zawartość sprawozdania
7. Załączniki
1. Cel ćwiczenia
Poznanie procesu rektyfikacji zdjęć lotniczych. Pokazanie róŜnicy pomiędzy przetwarzaniem rzutowym które jest moŜliwe dla terenów płaskich a ortorektyfikacją uwzględniająca rzeźbę terenu.
Dane
• Zeskanowane zdjecie w skali 1:13000: zdjecie
• Protokół kalibracji kamery (metryka_kamery-RC30.TXT) (zał. 3)
• NMT: nmtropsim
• Punkty osnowy fotogrametrycznej (współrzędne w układzie 1992, powiększenia) (zał. 1 i 2)
• Dane do weryfikacji dokładności (plik wektorowy drogi_77 )
-
2. Wprowadzenie do ILWIS-a i zapoznanie si ę z danymi
Środowisko ILWIS operuje na domenach. Domena (ikona ) jest to dziedzina w której zawierają się wartości prezentowane na mapach lub w tabelach. ILWIS umoŜliwia istnienie kilku typów domen:
Class – domena klas, zawiera listę nazw jakie mogą przyjmować piksele na mapie. MoŜe występować z opcją Group, wtedy oprócz nazwy definiować moŜna górną granicę przedziału wartości, jakie moŜe przyjmować domena.
Identifier – kaŜdemu elementowi na mapie przypisywany jest unikalny numer. Mapa wektorowa „drogi_77” (ikona ) występuje w tej domenie, kaŜdej linii przypisany jest unikalny numer. UmoŜliwia to jednoznaczną identyfikację kaŜdej linii a co za tym idzie przypisaniem do mapy tabeli z atrybutami
(tabela „drogi_77” – ikona ).
Bool – domena zawiera rodzaje wartości: True oraz False, czyli prawda i fałsz.
Value – kaŜdemu elementowi na mapie przyporządkowana jest jakaś konkretna wartość. Domena najczęściej wykorzystywana do prezentacji danych wysokościowych. W tej domenie występuje mapa „nmtropsim” (ikona ).
Dodatkowo kaŜda domena moŜe posiadać wartości nieokreślone oznaczane w ILWIS jako „?”.
Mapa „nmtropsim” posiada równieŜ plik georeferencji (ikona ). Plik łączy układ pikselowy mapy rastrowej z układem współrzędnych terenowych.
Dane do tematu zawierają równieŜ plik „ukl1992” definiujący odwzorowanie (ikona ), dzięki któremu moŜliwe jest równieŜ wyświetlanie w oknie mapy współrzędnych geograficznych.
Zapoznanie z danymi
Utworzyć katalog „Rektyfikacja” i wgrać do niego dane
Wyświetlić plik „zdjęcie” w układzie pikselowym – wybierając strzałkę , po kliknięciu lewym klawiszem myszy zaobserwować jak zmieniają się współrzędne w prawym dolnym rogu okna mapy.
Wyświetlić plik NMT - wybierając strzałkę , po kliknięciu lewym klawiszem myszy zaobserwować jak zmieniają się współrzędne w prawym dolnym rogu okna mapy oraz wysokość wyświetlana obok
znaczka .
º Zaobserwować zróŜnicowany charakter terenu (por. lewy górny naroŜnik z prawym dolnym)
º Zaplanować 2 obszary, zróŜnicowane pod względem morfologii terenu, dla których wygenerowane zostaną fotomapy i ortofotomapy – zapisać minimalne i maksymalne wartości X i Y (wielkość obszaru około: ∆X 2500 m, ∆Y 600 m)
- Ograniczenie obszaru wynika z czasochłonności procedury resamplingu
Uproszczony protokół kalibracji kamery – współrzędne znaczków tłowych, stała kamery.
-
Generowanie fotomapy i ortofotomapy ze zdjęcia lotniczego z wykorzystaniem oprogramowania ILWIS 2008-11-25 _________________________________________________________________________________
Łukasz Kulesza, modyfikacja Beata Hejmanowska, Andrzej Wróbel
3. Generowanie fotomapy, przetwarzanie rzutowe
Niezbędne dane: zdjęcie, minimum 4 pary fotopunktów (znane x, y (na zdjęciu) i X, Y (terenowe)).
1. Wyświetlić plik „zdjecie”.
2. W oknie mapy – wybrać: File/Create/Georeference. (tworzenie georeferencji dla pliku „zdjecie”). Nazwa georeferencji „rzutowa-plaski”, GeoRef Tiepoints, Coordinate System „ukl1992”, Sub-Pixel Precision.
3. Narzędziem kliknąć na fotopunkt, wprowadzić współrzędne XY. W ten sposób dodać 4 punkty (2 górne i 2 dolne) dla obszaru płaskiego, opcja transformacji Projective.
4. Kliknąć ikonę - zostanie obliczona transformacja
5. NałoŜyć warstwę (Layers - Add layer) „drogi_77”, przyglądnąć się im w obszarze objętym fotopunktami (prawy dolny naroŜnik). Sprawdzić obszar pagórkowaty (lewy górny naroŜnik).
6. Narzędziem kliknąć na piąty fotopunkt w środku obszaru. Program podstawi jego współrzędne terenowe obliczone za pomocą transformacji rzutowej (parametry transformacji wyznaczone na podstawie czterech punktów pomierzonych wcześniej). Porównać proponowane współrzędne ze współrzędnymi z wykazu. Zanotować róŜnice. Wpisać współrzędne z wykazu i wykonać transformację. Zanotować odchyłki na poszczególnych punktach (dwie ostatnie kolumny tabelki pod obrazem). Odchyłki te wynikają z faktu wyrównania przy obliczeniach współczynników transformacji, poniewaŜ wykorzystaliśmy pięć fotopunktów przy czterech koniecznych. Odchyłki te są w pikselach a piksel przetworzonego zdjęcia wynosi około 20 cm. Zastanowić się nad wysokościami fotopunktów – czy leŜą na jednej wysokosci.
7. Zatwierdzić transformację rzutową i zamknąć okno mapy.
8. W oknie głównym ILWIS utworzyć następną georeferencję: File/Create/Georeference. Nazwa „fotomapa-pł”; Georef Corners; Coordinate System „ukl1992”; rozmiar piksela 0.2; wprowadzić zakres współrzędnych spisany wcześniej; odznaczona opcja „Center of Corner pixels”.
9. Utworzenie fotomapy: Z zakładki Operation-List wybrać Resample. Parametry: mapa rastrowa „zdjecie”; metoda najbliŜszego sąsiada; wynik zapisać z nazwą: „nazwisko_rzutowa-pł”; georeferencja „fotomapa-pł”. Zatwierdzić przyciskiem „Show” i czekać cierpliwie.
10. Powtórzyć punkty od 1 do 7 dla obszaru pagórkowatego (lewy górny róg zdjęcia). Przy czym: w pkt. 2 nową georeferencję nazwać „rzutowa-pagórki”, a w pkt. 8 nową georeferencję nazwać „fotomapa-pag”. Wynik resamplingu nazwać „nazwisko_rzutowa-pag”.
11. Porównać wartości odchyłek przy transformacji rzutowej dla obszaru płaskiego i pagórkowatego. Czy istnieje zaleŜność wielkości odchyłek transformacji od wielkości róŜnic wysokości pomiędzy fotopunktami.
-
12. Wyświetlić utworzone mapy i nałoŜyć na nie warstwę wektorową dróg, zwrócić uwagę na rozbieŜności.
4. Przykłady fotomap
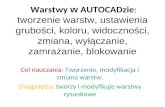
Rysunek 1. Fotomapa wraz z siecią dróg, po wybraniu opcji: transformacja rzutowa – teren
płaski
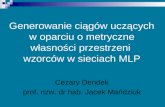
Rysunek 2. Fotomapa wraz z siecią dróg, po wybraniu opcji: transformacja rzutowa – teren o
urozmaiconej rzeźbie
-
Generowanie fotomapy i ortofotomapy ze zdjęcia lotniczego z wykorzystaniem oprogramowania ILWIS 2008-11-25 _________________________________________________________________________________
Łukasz Kulesza, modyfikacja Beata Hejmanowska, Andrzej Wróbel
5. Generowanie ortofotomapy
1. Wcześniej wykonana rektyfikacja zdjęcia spowodowała, Ŝe została dołączona do pliku: zdjęcie georeferencja: fotomapa-... Przed przystąpieniem do tworzenia nowej georeferencji naleŜy odłączyć wcześniejszą. Wykonuje się to następująco: w oknie głównym programu ILWIS naleŜy stanąć myszą na obrazie zdjęcie, przycisnąć prawy przycisk myszy, wybrać properties – w zakładce Raster Map ustawić georeferencję NONE
2. Wyświetlić plik „zdjecie”.
3. W oknie mapy – File/Create/Georeference. (tworzenie georeferencji dla pliku „zdjecie”) ustawić: Nazwa georeferencji „ortofoto”, GeoRef Ortho Photo, wybrać DTM nmtropsim , Sub-Pixel Precision.
4. Wykonać orientację wewnętrzną zdjęcia: Narzędziem kliknąć na znaczek tłowy, wprowadzić współrzędne xy tłowe z raportu kalibracji kamery. W ten sposób dodać 8 znaczków tłowych. Ustawić transformację biliniową, przeanalizować odchyłki na znaczkach po transformacji, wcisnąć OK
5. Wykonać orientację zewnętrzną zdjęcia (wyznaczyć elementy orientacji zewnętrznej na
podstawie pomierzonych fotopunktów): Narzędziem kliknąć na fotopunkt, wprowadzić
współrzędne XYZ. W ten sposób dodać 6 punktów następnie zatwierdzić i zamknąć okno mapy.
6. W oknie głównym ILWIS utworzyć drugą georeferencję File/Create/Georeference. Nazwa „ortofotomapa-pł”, Georef Corners, Coordinate System „ukl1992”,rozmiar piksela 0.2, wprowadzić zakres współrzędnych spisany wcześniejdla obszaru płaskiego (jak przy rzutowej), odznaczona opcja „Center of Corner pixels”.
7. Utworzenie ortofotomapy: Z zakładki Operation-List wybrać Resample, mapa rastrowa „zdjecie”, metoda najbliŜszego sąsiada, wynik zapisać jako „orto-pł-nazwisko”, georeferencja „ortofotomapa-pł”. Zatwierdzić przyciskiem „Show” i czekać cierpliwie.
8. Wyświetlić mapę i nałoŜyć na nią warstwę wektorową dróg, zwrócić uwagę na rozbieŜności, podobnie jak w przypadku fotomapy.
9. Punkty 6, 7 i 8 powtórzyć dla pagórkowatego obszaru ( nazwa georeferencji: „ortofotomapa-gr) .
6. Zawarto ść sprawozdania
1. Opis przebiegu zajęć
2. Opis numerycznego modelu terenu oraz opis wykorzystywanego zdjęcia w nawiązaniu do ukształtowania terenu
3. Wyniki transformacji rzutowej dla obszaru płaskiego i pagórkowatego (odchyłki na punkcie środkowym, odchyłki w pikselach na wszystkich (wielkość terenowa piksela = ?) Porównanie wartości średniej wielkości odchyłek z średnia z róŜnic wysokości fotopunktów dla obu obszarów
4. Ocena dokładności wpasowania wektorów dróg w obraz fotomapy
5. Opis przebiegu opracowania ortofotomapy
6. Ocena dokładności wpasowania wektorów dróg w obraz ortofotomapy dla obu obszarów
-
7. Załączniki
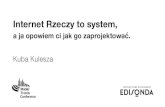
1. Załącznik 1 – Fotopunkty do przetwarzania rzutowego
Teren płaski
Do transformacji wybra ć początkowo cztery punkty naro Ŝne: 15, 27, 33, 32, potem doda ć piąty środkowy - 34
-
Generowanie fotomapy i ortofotomapy ze zdjęcia lotniczego z wykorzystaniem oprogramowania ILWIS 2008-11-25 _________________________________________________________________________________
Łukasz Kulesza, modyfikacja Beata Hejmanowska, Andrzej Wróbel
-
Teren pagórkowaty
Do transformacji wybra ć początkowo cztery punkty naro Ŝne: 21, 22, 23, 24 potem doda ć środkowy – 35.
-
Generowanie fotomapy i ortofotomapy ze zdjęcia lotniczego z wykorzystaniem oprogramowania ILWIS 2008-11-25 _________________________________________________________________________________
Łukasz Kulesza, modyfikacja Beata Hejmanowska, Andrzej Wróbel
-
Generowanie fotomapy i ortofotomapy ze zdjęcia lotniczego z wykorzystaniem oprogramowania ILWIS 2008-11-25 _________________________________________________________________________________
Łukasz Kulesza, modyfikacja Beata Hejmanowska, Andrzej Wróbel
Wykazy współrz ędnych
Teren płaski
Nr X Y Z 15 591 122.79 231 206.21 220.67 27 590 760.35 230 341.72 216.15 32 589 826.48 231 201.49 223.24 33 589 478.20 230 418.17 222.48 34 590 435.07 230 715.03 218.72
Teren pagórkowaty
Nr X Y Z 21 588 331.52 231 759.28 273.01 22 588 669.87 233 181.20 268.49 23 590 287.19 233 275.17 246.10 24 590 185.15 231 999.88 232.42 35 589 021.18 232 344.03 276.42
-
2. Załącznik 2 - Zestawienie współrz ędnych fotopunktów do ortofotografii, powi ększenia
nr X Y Z 1 590947.40 232457.00 222.50 2 591088.40 231395.10 221.50 3 589007.00 231796.50 260.40 4 588846.90 230617.90 229.60 5 588641.10 233166.30 270.00 6 590674.67 230761.63 219.15
-
Generowanie fotomapy i ortofotomapy ze zdjęcia lotniczego z wykorzystaniem oprogramowania ILWIS 2008-11-25 _________________________________________________________________________________
Łukasz Kulesza, modyfikacja Beata Hejmanowska, Andrzej Wróbel
-
Generowanie fotomapy i ortofotomapy ze zdjęcia lotniczego z wykorzystaniem oprogramowania ILWIS 2008-11-25 _________________________________________________________________________________
Łukasz Kulesza, modyfikacja Beata Hejmanowska, Andrzej Wróbel
3. Załącznik 3 - Metryka kamery
Metryka kamery RC20. Jako współrzędne punktu głównego przyjąć: ppac. Numeracja znaczków tłowych (fiudcial) od lewego górnego naroŜnika w prawo.
begin camera_parameters RC20
focal_length: 153.17
ppac: 0.008 0.001
ppbs: 0.004 -0.001
film_format: 230 230
fiducial: 1 -106.004 106.006
fiducial: 2 106.004 106.005
fiducial: 3 106.005 -106.006
fiducial: 4 -106.004 -106.004
fiducial: 5 0.001 110.003 (środkowy górny)
fiducial: 6 110.003 -0.001
fiducial: 7 0.000 -110.003
fiducial: 8 -110.000 0.000
lens_distortion_flag: on
input_mode: linear
-
distortion_spacing: 10 20 30 40 50 60 70 80 90 100 110 120 130 140 148
distortion_deltas: 0.5 0.7 0.5 0.7 0.6 0.6 0.2 0.2 0 -0.1 -0.6 -1.4 -0.9000000000000004 -0.1 1.2
distortions: 0.5 0.7 0.5 0.7 0.6 0.6 0.2 0.2 0 -0.1 -0.6 -1.4 -0.9000000000000004 -0.1 1.2
io_required: yes
camera_type: frame
media_type: film
focal_length_calibration_flag: off
calibrated_focal_length_stddev: 0.03
ppac_calibration_flag: off
calibrated_ppac_stddevs: 0.003 0.003
self_calibration_enabled_params: 4095
antenna_offsets: 0.072 -0.046 1.092
end camera_parameters