Elektroniczne Układy i Systemy Zasilania
6
Elektroniczne Układy Elektroniczne Układy i Systemy Zasilania i Systemy Zasilania Politechnika Śląska w Gliwicach Politechnika Śląska w Gliwicach Wydział Automatyki, Elektroniki i Wydział Automatyki, Elektroniki i Informatyki Informatyki dr inż. Ryszard Siurek dr inż. Ryszard Siurek Wykład 3 Wykład 3
description
Elektroniczne Układy i Systemy Zasilania. Wykład 3. Politechnika Śląska w Gliwicach Wydział Automatyki, Elektroniki i Informatyki dr inż. Ryszard Siurek. Porównanie stabilizatora ciągłego i impulsowego. Podstawowy schemat funkcjonalny. Stabilizator klasyczny ciągły. Stabilizator impulsowy. - PowerPoint PPT Presentation
Transcript of Elektroniczne Układy i Systemy Zasilania

Elektroniczne Układy i Elektroniczne Układy i Systemy ZasilaniaSystemy Zasilania
Politechnika Śląska w GliwicachPolitechnika Śląska w GliwicachWydział Automatyki, Elektroniki i InformatykiWydział Automatyki, Elektroniki i Informatyki
dr inż. Ryszard Siurekdr inż. Ryszard Siurek
Wykład 3Wykład 3

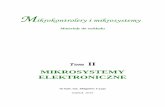
Porównanie stabilizatora ciągłego i impulsowego Porównanie stabilizatora ciągłego i impulsowego Podstawowy schemat funkcjonalnyPodstawowy schemat funkcjonalny
Stabilizator klasyczny ciągły Stabilizator impulsowy
--++
VrVr
USUS
wzmwzm RoRo
R1R1
R2R2
Uwe
UwyUwy(Uo)(Uo)
IoIoUwyUwy(Uo)(Uo)
RoRo
Uwe
fpfp
fgfg
KuKu
IoIo
Uce
Uo = Uwe – Uce = const. Po = Uo.Io Pstr = Uce.Io
TT
=== = = =
PoPoPwePwe
Uo.IoUwe.Io
Uwe - UceUwe
sprawność:sprawność:
Uce > Ucemin (~2,5V)Uce > Ucemin (~2,5V)0,3 < 0,3 < < 0,5 typowe wartości < 0,5 typowe wartości
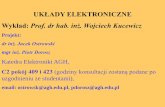
fp =fp = 11TT
U1
U1
TT
U1= U= U1śr + + UUisin(2isin(2iffpt)t)i=1i=1
UweU1śrU1śr == UweUwe == UweUwe
TT
– – współczynnikwspółczynnik wypełnieniawypełnienia
odfiltrowaneodfiltrowane
T1T1T1T1
Straty mocy w T1 - dużeStraty mocy w T1 - duże
straty mocy w T1 = 0straty mocy w T1 = 0straty mocy w filtrze (LC) = 0straty mocy w filtrze (LC) = 0
U1śrU1śr
= 1 (100%)= 1 (100%)

T L
D C Ro
IoIL
ICID
IT
Uwe U0
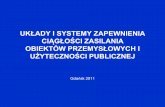
Założenia:Założenia:
1.1. Dioda D i tranzystor T są idealnymi elementami przełączającymiDioda D i tranzystor T są idealnymi elementami przełączającymi
2.2. Rezystancja szeregowa dławika L jest pomijalna (Rezystancja szeregowa dławika L jest pomijalna (rrL = 0= 0))
3.3. Pojemność kondensatora C jest bardzo duża (Pojemność kondensatora C jest bardzo duża (UUc << << UUo))EEL
EECDD
TT EEL
EECDD
TT
Uwe UweI taktI takt II taktII takt
T – przewodzi, D – nie przewodziT – przewodzi, D – nie przewodzi T – nie przewodzi, D – przewodziT – nie przewodzi, D – przewodzi
IoIo
STEROWNIK IMPULSOWY „STSI”STEROWNIK IMPULSOWY „STSI”SSzeregowy zeregowy TTranzystor ranzystor SSzeregowa zeregowa IIndukcyjnośćndukcyjność
U1U0
UC
~~
UC

tt
tt
tt
tt
tt
tt
U1
IT
IL
ID
IC
UC~~
TT
I I takt - schemat zastępczy 0 takt - schemat zastępczy 0 << t < t <
U1 = Uwe
rrL= 0= 0~ ~ ILL IILmin
U0
Ro
II0
0
00 I
UI
L0 r
LT
Obliczamy Obliczamy IIL korzystając z metody superpozycjikorzystając z metody superpozycji
‘‘
,,
)e(1r
UUeI(t)i 00 T
t
L
0weT
t
Lmin'L
IILmin
...)T
t1(1
r
UU.....)
T
t(1I(t)i
0L
0we
0Lmin
'L
<<1<<1
tL
UUI
rLt
r
UUI(t)i 0we
Lmin
L
L
0weLmin
'L
L
U-UΔI 0we'
L zmiana prądu w dławikuzmiana prądu w dławiku
ILmin
ILmin
Analiza podstawowych przebiegów w stabilizatorze STSIAnaliza podstawowych przebiegów w stabilizatorze STSI
'LΔI
ILmax
0
20weC
t
0
CC t2LC
UU(0)Udt(t)i(t)u
~~UC
UC~~ << U<< U00
UUc(0)(0)

tt
tt
tt
tt
tt
tt
U1
IT
IL
ID
IC
UC~~
TT
ILmin
ILmin
'LΔI
ILmax
Τ20
C
-t
CC )-(t2LC
U)(Udt)-(ti(t)u
rrL= 0= 0~ ~ ILL IILmax
U0
Ro
II0
0
00 R
UI
L0 r
LT
~~UC
UC~~ << U<< U00
II II takt - schemat zastępczy takt - schemat zastępczy ttTT
U0
„„
)00 T
-t
L
0T
-t
Lmax''
L e(1r
UeI(t)i
Obliczamy Obliczamy IIL korzystając z metody superpozycjikorzystając z metody superpozycji„„
)-(tL
UI(t)i 0Lmax
''L
analogicznie jak poprzednio:analogicznie jak poprzednio:
)(TL
UΔI 0''
L zmiana prądu w dławikuzmiana prądu w dławiku
w stanie ustalonym: w stanie ustalonym: ''L
'L ΔIΔI
ILmax
ILmin
0ICsr
II0
)(TL
U
L
U-U 00we
UUc(())we0 U
TU
Funkcja przejścia sterownika STSI Funkcja przejścia sterownika STSI
we0UU

Dobór indukcyjności i pojemności, Dobór indukcyjności i pojemności, przykładowe obliczenia dla regulatora impulsowego STSIprzykładowe obliczenia dla regulatora impulsowego STSI
Założenia: Uwe = 10 – 15V, Uo = 5V, Io = 10A, f = 100kHzZałożenia: Uwe = 10 – 15V, Uo = 5V, Io = 10A, f = 100kHz
z reguły przyjmuje się: z reguły przyjmuje się: IILL < 0,1 – 0,2 I < 0,1 – 0,2 I0max0max
zakładamy: zakładamy: IILL < 1A < 1A
z danych wejściowych wynika:z danych wejściowych wynika:
weminU
0U
wemaxU0
U 0,50,33
s5s3,3 s10Τ
)-(TI
UL )-(T
L
UI
L
00L
dla dla minmin
dla dla maxmax
H][ 3,35s])0,33[-s](10[1[A]
5[V]L
H][ 2,5s])0,5[-s](10[1[A]
5[V]L
Przyjmujemy L = 3 Przyjmujemy L = 3 H – 4 H – 4 HH
Załóżmy w przybliżeniu, że składowa zmienna napięcia na kondensatorze wynosi:Załóżmy w przybliżeniu, że składowa zmienna napięcia na kondensatorze wynosi:
2max
0wemax0wemax
2LUU
C2tdt
LUU
C12UΔ C
max
0
F] [ 6252L
UU
UΔ
2C 2max
0wemax
C
Przyjmujemy C = 1000 Przyjmujemy C = 1000 FF
Przyjmijmy:Przyjmijmy:
0,1VUΔ C