Budowa, sterowanie i programowanie robota‡wiczenie-PAR5... · Budowa, sterowanie i programowanie...
14
Ćwiczenie PAR5 Budowa, sterowanie i programowanie robota Spis treści 1. Wprowadzenie 2. Konstrukcja robota przemysłowego RV- M1 2.1. Opis konstrukcji 2.2. Opis jednostki sterującej 2.3. Opis panelu programowania 3. Sterowanie i programowanie robota RV-M1 z ręcznego panelu 4. Przykładowy przebieg ćwiczenia 5. Programowanie robota RV-M1 z wykorzystaniem programu Cosimir ®
-
Upload
vuongkhuong -
Category
Documents
-
view
256 -
download
0
Transcript of Budowa, sterowanie i programowanie robota‡wiczenie-PAR5... · Budowa, sterowanie i programowanie...

Ćwiczenie PAR5
Budowa, sterowanie i programowanie robota
Spis treści
1. Wprowadzenie 2. Konstrukcja robota przemysłowego RV- M1
2.1. Opis konstrukcji
2.2. Opis jednostki sterującej
2.3. Opis panelu programowania 3. Sterowanie i programowanie robota RV-M1 z ręcznego panelu
4. Przykładowy przebieg ćwiczenia 5. Programowanie robota RV-M1 z wykorzystaniem programu Cosimir®

2
1. Wprowadzenie
Robot przemysłowy MOVEMASTER EX RV-M1 jest produkowany przez japońską
firmę Mitsubishi Electric. Cechą charakterystyczną tego robota jest jego zwarta budowa oraz
mała masa 19 kg. Manipulatory RV-M1 chętnie stosowane są przy robotyzacji zadań
transportowych, przy takich czynnościach jak np.: podawanie i odbieranie, pakowanie i
paletyzacja obiektów, obsługa maszyn i różnych urządzeń.
Robot MOVEMASTER EX RV-M1 składa się z:
manipulatora, sztywno mocowanego do podłoża,
jednostki sterującej, połączonej przewodami z robotem,
ręcznego panelu programowania manipulatora.
Rys. 1. Schemat stanowiska z robotem RV-M1:
manipulator, jednostka sterująca, ręczny panel programowania
2. Konstrukcja robota przemysłowego RV- M1
2.1. Opis konstrukcji
Rys. 2. Część manipulacyjna robota przemysłowego RV-M1: 1 – podstawa, 2 – korpus obrotowy,
3 – ramię dolne, 4 – ramię górne, 5 – przegub
1
2
3 4
5
3
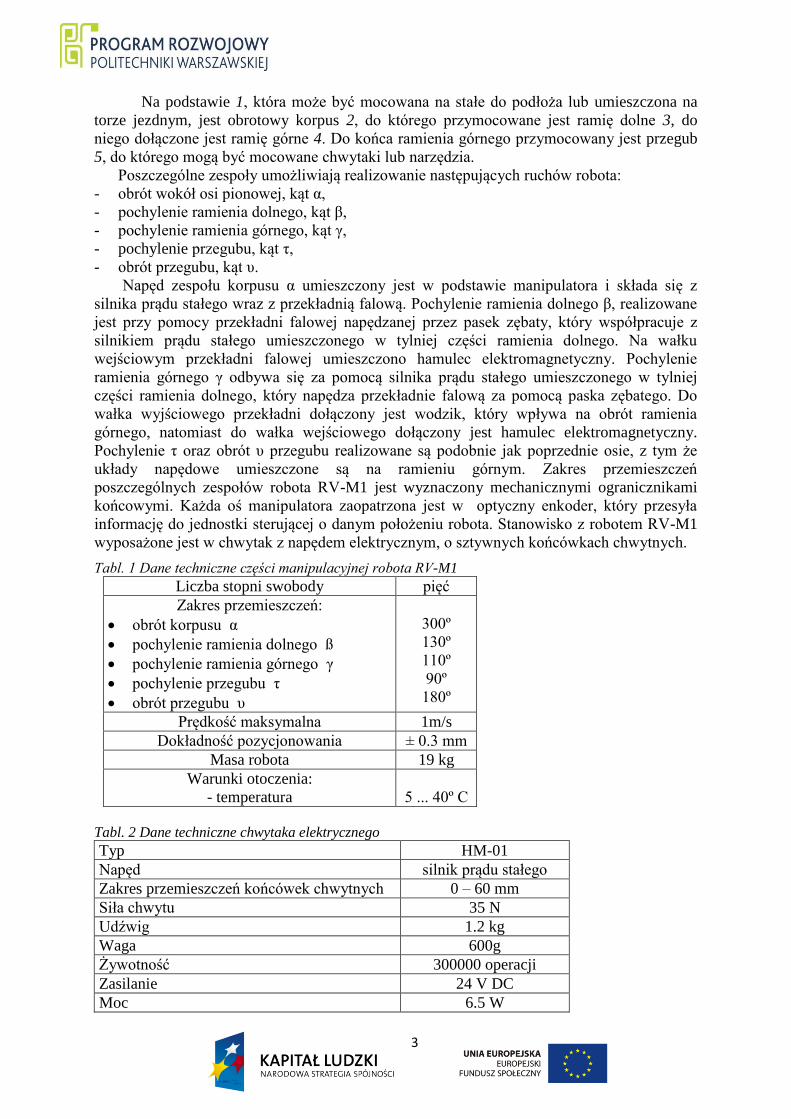
Na podstawie 1, która może być mocowana na stałe do podłoża lub umieszczona na
torze jezdnym, jest obrotowy korpus 2, do którego przymocowane jest ramię dolne 3, do
niego dołączone jest ramię górne 4. Do końca ramienia górnego przymocowany jest przegub
5, do którego mogą być mocowane chwytaki lub narzędzia.
Poszczególne zespoły umożliwiają realizowanie następujących ruchów robota:
- obrót wokół osi pionowej, kąt α,
- pochylenie ramienia dolnego, kąt β,
- pochylenie ramienia górnego, kąt γ,
- pochylenie przegubu, kąt τ,
- obrót przegubu, kąt υ.
Napęd zespołu korpusu α umieszczony jest w podstawie manipulatora i składa się z
silnika prądu stałego wraz z przekładnią falową. Pochylenie ramienia dolnego β, realizowane
jest przy pomocy przekładni falowej napędzanej przez pasek zębaty, który współpracuje z
silnikiem prądu stałego umieszczonego w tylniej części ramienia dolnego. Na wałku
wejściowym przekładni falowej umieszczono hamulec elektromagnetyczny. Pochylenie
ramienia górnego γ odbywa się za pomocą silnika prądu stałego umieszczonego w tylniej
części ramienia dolnego, który napędza przekładnie falową za pomocą paska zębatego. Do
wałka wyjściowego przekładni dołączony jest wodzik, który wpływa na obrót ramienia
górnego, natomiast do wałka wejściowego dołączony jest hamulec elektromagnetyczny.
Pochylenie τ oraz obrót υ przegubu realizowane są podobnie jak poprzednie osie, z tym że
układy napędowe umieszczone są na ramieniu górnym. Zakres przemieszczeń
poszczególnych zespołów robota RV-M1 jest wyznaczony mechanicznymi ogranicznikami
końcowymi. Każda oś manipulatora zaopatrzona jest w optyczny enkoder, który przesyła
informację do jednostki sterującej o danym położeniu robota. Stanowisko z robotem RV-M1
wyposażone jest w chwytak z napędem elektrycznym, o sztywnych końcówkach chwytnych.
Tabl. 1 Dane techniczne części manipulacyjnej robota RV-M1
Liczba stopni swobody pięć
Zakres przemieszczeń:
obrót korpusu α
pochylenie ramienia dolnego ß
pochylenie ramienia górnego γ
pochylenie przegubu τ
obrót przegubu υ
300º
130º
110º
90º
180º
Prędkość maksymalna 1m/s
Dokładność pozycjonowania ± 0.3 mm
Masa robota 19 kg
Warunki otoczenia:
- temperatura
5 ... 40º C
Tabl. 2 Dane techniczne chwytaka elektrycznego
Typ HM-01
Napęd silnik prądu stałego
Zakres przemieszczeń końcówek chwytnych 0 – 60 mm
Siła chwytu 35 N
Udźwig 1.2 kg
Waga 600g
Żywotność 300000 operacji
Zasilanie 24 V DC
Moc 6.5 W

4
Rys. 3. Konstrukcja robota RV-M1: 1,4,9,14,18 – silnik DC, 2,6,16,19 – przekładnia falowa,
3,8,13,17,20 – wyłącznik krańcowy, 5,10,15 – pasek zębaty, 7,12 – hamulec elektromagnetyczny,
11 – wodzik

5
2.2. Opis jednostki sterującej
Jednostka sterująca robota przemysłowego RV-M1 zawiera: procesor, płytę główną,
pamięci RAM oraz EPROM.
Rys. 4. Jednostka sterująca robota RV-M1: a) przednia strona, b) tylna strona
Jednostka sterująca zawiera następujące bloki i przyciski funkcjonalne:
1 zasilanie (lampka),
2 STOP AWARYJNY (przycisk) – natychmiastowe zatrzymanie robota,
3 błąd (lampka) – sygnalizuje wykrycie przez system błędu,
4 praca (lampka) – sygnalizuje, że robot jest w trakcie wykonywania programu,
5 start (przycisk) – naciśnięcie powoduje wystartowanie programu,
6 stop (przycisk) – wciśniecie powoduje zatrzymanie wykonywanego programu,
7 reset (przycisk) – kasowanie wykonywanego programu, służy także do kasowania błędu.
8 złącze Centronics – złącze umożliwiające połączenie jednostki z komputerem PC,
9 złącze RS- 232C – złącze szeregowe umożliwiające połączenie jednostki sterującej z PC,
10 złącze I/O – złącze do podłączenia zewnętrznych urządzeń, np. wyłączniki, kontrolery,
11 złącze ręcznego panelu programowania, 12 złącze zasilania – do podłączenia kabla zasilania do robota,
13 złącze sygnałowe – do podłączenia jednostki sterującej z robotem,
14 złącze dodatkowego przycisku STOP AWARYJNY, 15 uziemienie,
16 przycisk wyboru chwytaka – AC (napęd pneumatyczny), DC (napęd elektryczny),
17 bezpieczniki – (10A),
18 przycisk zasilania,
19 złącze zasilania jednostki sterującej.
2.3. Opis panelu programowania
Ręczny panel programowania ułatwia programowanie robota RV-M1 i uwalnia
operatora od konieczności korzystania z komputera PC. Dzięki niemu możliwe jest uzyskanie
wszystkich potrzebnych funkcji umożliwiających napisanie programu a także jego
monitorowanie.
Ręczny panel programowania składa się z przycisków, które oznaczają:
1 przycisk zasilania – w momencie naciśnięcia klawisze panelu stają się dostępne; kiedy
korzystamy z komputera PC należy panel wyłączyć,
2 przycisk STOP AWARYJNY,
3 INC (+ENT ) – przesunięcie manipulatora do pozycji o jeden numer większej od obecnej,
4 DEC (+ENT ) –przesunięcie manipulatora do pozycji o jeden numer mniejszej od obecnej,

6
5 P.S (+NUMER+ENT) – definiowanie numeru pozycji, który przypisany będzie do
aktualnej pozycji robota; jeśli ten sam numer zostanie przypisany do np. dwóch różnych
pozycji manipulatora to pod tym numerem będzie aktywna ostatnia zapisana pozycja,
6 P.C (+NUMER+ENT) – kasowanie numeru pozycji wybranej przez operatora,
7 NST (+ ENT) – bazowanie robota,
8 ORG (+ENT) – przemieszczenie manipulatora do pozycji w układzie kartezjańskim,
9 TRN (+ENT) – zapisanie programu przechowywanego na EPROM-ie operatora do
pamięci RAM jednostki sterującej,
10 WRT (+ENT) – zapisanie programu przechowywanego w pamięci RAM jednostki
sterującej do EPROM-u operatora,
11 MOV (+NUMER+ENT) – przemieszczenie robota do zdefiniowanej pozycji ze stałą
prędkością SP4,
12 STEP (+NUMER+ENT) – wykonywanie programu krok po kroku poczynając od pozycji
zdefiniowanej przez operatora,
13 PTP – włączenie pracy robota w układzie biegunowym (układ odniesienia regionalny),
14 XYZ – włączenie pracy robota w układzie kartezjańskim (układ odniesienia globalny),
15 TOOL – układ odniesienia lokalny, dotyczący przemieszczania chwytaka robota,
16 ENT – przycisk zatwierdzający wszystkie komendy,
Rys. 5. Ręczny panel programowania
17 X+/B+ – przemieszczenie chwytaka robota w lewo patrząc od przodu dla układu
kartezjańskiego, lub obrót korpusu w kierunku zgodnym z ruchem wskazówek zegara dla
układu biegunowego,

7
18 X-/B- – przemieszczenie chwytaka robota w prawo patrząc od przodu dla układu
kartezjańskiego, lub obrót korpusu w kierunku przeciwnym do ruchu wskazówek zegara
dla układu biegunowego,
19 Y+/S+ – przemieszczenie chwytaka robota do przodu patrząc od przodu robota dla układu
kartezjańskiego, lub pochylenie ramienia dolnego w górę dla układu biegunowego,
20 Y-/S- – przemieszczenie chwytaka robota do tyłu patrząc od przodu robota dla układu
kartezjańskiego, lub pochylenie ramienia dolnego w dół dla układu biegunowego,
21 Z+/E+4 – przemieszczenie chwytaka robota do góry patrząc od przodu robota dla układu
kartezjańskiego, lub pochylenie ramienia górnego w górę dla układu biegunowego;
klawisz służy także jako przycisk numeryczny „4”,
22 Z-/E-9 – przemieszczenie chwytaka robota do dołu patrząc od przodu robota dla układu
kartezjańskiego, lub pochylenie ramienia górnego w dół dla układu biegunowego; klawisz
służy także jako przycisk numeryczny „9”,
23 P+3 – przemieszczenie chwytaka robota do przodu patrząc od przodu robota dla układu
kartezjańskiego, lub pochylenie przegubu w górę dla układu biegunowego; klawisz służy
także jako przycisk numeryczny „3”,
24 P-8 – przemieszczenie chwytaka robota do tyłu patrząc od przodu robota dla układu
kartezjańskiego, lub pochylenie przegubu w dół dla układu biegunowego; klawisz służy
także jako przycisk numeryczny „8”,
25 R+2 – obrót przegubu w kierunku zgodnym z ruchem wskazówek zegara patrząc od
przodu robota; klawisz służy także jako przycisk numeryczny „2”,
26 R-7 – obrót przegubu w kierunku przeciwnym do ruchu wskazówek zegara patrząc od
przodu robota; klawisz służy także jako przycisk numeryczny „7”,
27 OPTION+1 – przemieszczenie dodatkowej osi w kierunku dodatnim; klawisz służy także
jako przycisk numeryczny „1”,
28 OPTION-6 – przemieszczenie dodatkowej osi w kierunku ujemnym; klawisz służy także
jako przycisk numeryczny „6”,
29 ◄O► 0 – otwarcie chwytaka; klawisz służy także jako przycisk numeryczny „0”,
30 ►C◄ 5 – zamknięcie chwytaka; klawisz służy także jako przycisk numeryczny "5".
Wyświetlacz LED 4-cyfrowy informuje operatora o:
a) numerze linii programu aktualnie wykonywanego,
b) informuje o poprawnym wprowadzeniu komendy,
c) informuje o niepoprawnym wprowadzeniu komendy.
3. Sterowanie i programowanie robota RV-M1 z ręcznego panelu
Programowanie robota RV-M1 odbywa się przy pomocy ręcznego panelu sterowania
lub przy pomocy komputera klasy PC.
Po włączeniu zasilania jednostki sterującej oraz panelu programowania należy
przeprowadzić bazowanie robota (kombinacja klawiszy ręcznego panelu sterowania
NST+ENT). Robot RV-M1 programowany jest metodą uczenia, tj. w ten sposób, że za
pomocą przycisków 17 - 26 do naprowadzania robota w wymagane położenie, można
sterować serwonapędami każdej osi robota w przestrzeni roboczej, doprowadzając do
żądanego położenia i orientacji chwytaka. Przez przyciśniecie przycisku 5 wpisuje się do
pamięci układu sterowania informacje o pozycjach poszczególnych osi robota w danym
punkcie. Przyciskami ruchu doprowadzamy robota do zajęcia kolejnego położenia, ponownie
naciskamy przycisk 5 - położenie to ponownie zostaje zapamiętane. I tak postępując dalej
można zaprogramować wymagany tor ruchu robota, który następnie należy przesłać do
pamięci jednostki sterującej.

8
4. Przykładowy przebieg ćwiczenia
Rys. 6 Widok stanowiska z robotem RV-M1
Na stanowisku z robotem RV-M1 (rys. 6) realizować można różnorodne zadania
transportowe w przestrzeni będącej w zasięgu ramion robota (gdy robot ma nieruchomą
podstawę) oraz w przestrzeni robota poruszającego się po torze jezdnym. Na stanowisku
można zainstalować system wizyjny (kamera na wysięgniku nad stolikiem) i realizować
zadania związane z analizą obrazu.
Podstawowe zadania wykonywane podczas ćwiczenia laboratoryjnego realizowane są
w ustalonym położeniu robota, bez korzystania z toru jezdnego i systemu wizyjnego.
Przykładowe zadania do zrealizowania podczas ćwiczenia:
1. zaprogramować robota realizującego zadanie paletyzacji sześciu elementów
ustawionych w stosie,
2. zaprogramować robota realizującego zadanie depaletyzacji sześciu elementów
i ustawianie ich w stos,
3. korzystając z pisaka trzymanego przez chwytak robota zaprogramować robota
wykonującego proste napisy lub rysunki figur geometrycznych.

9
Przykładowe zdefiniowanie pozycji przy pomocy ręcznego panelu sterowania:
doprowadza się manipulator robota do żądanej pozycji, następnie zapisuje się jako pozycja
np. 10 za pomocą klawiszy panelu: P.S 10 ENT. Jeśli chce się zweryfikować pozycje naciska
się kombinację klawiszy MOV 10 ENT. Aby program wykonywał się w sposób automatyczny
należy przepisać zawartość pamięci RAM do EPROM-u zainstalowanego w jednostce
sterującej.
5. Programowanie robota RV-M1 z wykorzystaniem programu Cosimir®
Jednostka sterująca robota Mitsubishi RV-M1 może realizować około 60 rozkazów,
ale tylko z 13 można korzystać za pomocą ręcznego panelu sterowania. Resztę rozkazów
można wykorzystać tworząc projekty sterowania robotem za pomocą programu Cosimir® na
komputerze PC. Dzięki tym rozkazom możliwe jest tworzenie programów sekwencyjnych
oraz programów korzystających z wyspecjalizowanych funkcji. Instrukcja obsługi programu
Cosimir® w załączniku nr 1.
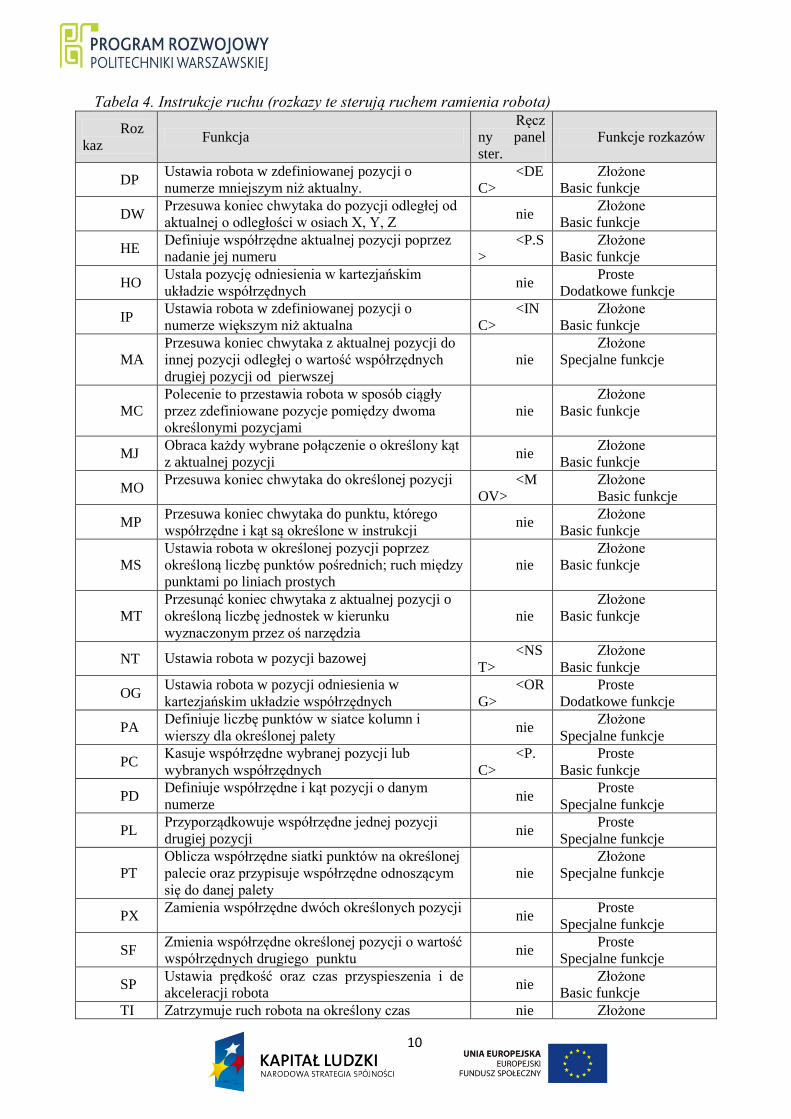
Wszystkie rozkazy można pogrupować w sześć podstawowych kategorii, które
przedstawione są poniżej w formie tabel z zamieszczonymi dodatkowymi komentarzami. Nie
wszystkie rozkazy są odpowiednie do użycia we wszystkich pisanych programach i nie
wszystkie są dostępne z ręcznego panelu sterowania.
Komentarze w tabelach 3 – 6 w rubryce funkcje rozkazów:
„Proste” – proste zadania wykonywane na robocie, redagując program lub podczas
uczenia robota,
„Złożone” – rozkazy z tą nominacją mogą być używane bez ograniczeń w robocie,
„Basic funkcje” – rozkazy w kategorii "podstawowe funkcje" ułatwiają projektowanie
prostych programów robota (nie jest możliwe programowanie złożonych programów);
te rozkazy są szczególnie odpowiednie dla szybkiego zaznajomienia się z robotem,
„Dodatkowe funkcje" – dodatkowe funkcje zawierają wszystkie rozkazy logiczne dla
zapewnienia wewnętrznej kontroli programu robota; z tymi funkcjami możliwe jest
rozdzielenie program robota oraz definiowanie pętli wykonywanych wielokrotnie,
"Specjalne funkcje"– rozkazy w kategorii "Specjalne funkcje" zwiększają osiągnięcia
kontrolera robota; te rozkazy upraszczają na przykład programowanie zadań
paletyzowania.
Tabela 3. Instrukcje kontroli portu wejścia/wyjścia
Rozkaz Funkcja Ręczny
panel ster. Funkcje rozkazów
ID Wczytuje dane z portu wejścia (nie
musi być spełniony żaden warunek). nie
Złożone
Dodatkowa funkcje
IN
Pobiera synchronicznie dane z portu
wejścia (używa linii kontrolnych
sygnału).
nie
Złożone
Specjalne funkcje
OB Ustawia w odpowiedni stan
określony bit w porcie wyjścia nie
Złożone
Basic funkcje
OD Wysyła dane do portu wyjścia nie Złożone
Specjalne funkcje
OT
Wysyła synchronicznie dane do
portu wyjścia (używa linii
kontrolnych sygnału).
nie
Złożone
Specjalne funkcje
TB
Powoduje skok warunkowy do
określonej linii, jeśli dany bit na
porcie wejścia jest taki sam jak wartość w rejestrze wewnętrznym
nie
Złożone
Specjalne funkcje
10
Tabela 4. Instrukcje ruchu (rozkazy te sterują ruchem ramienia robota)
Roz
kaz Funkcja
Ręcz
ny panel
ster.
Funkcje rozkazów
DP Ustawia robota w zdefiniowanej pozycji o
numerze mniejszym niż aktualny.
<DE
C>
Złożone
Basic funkcje
DW Przesuwa koniec chwytaka do pozycji odległej od
aktualnej o odległości w osiach X, Y, Z nie
Złożone
Basic funkcje
HE Definiuje współrzędne aktualnej pozycji poprzez
nadanie jej numeru
<P.S
>
Złożone
Basic funkcje
HO Ustala pozycję odniesienia w kartezjańskim
układzie współrzędnych nie
Proste
Dodatkowe funkcje
IP Ustawia robota w zdefiniowanej pozycji o
numerze większym niż aktualna
<IN
C>
Złożone
Basic funkcje
MA
Przesuwa koniec chwytaka z aktualnej pozycji do
innej pozycji odległej o wartość współrzędnych
drugiej pozycji od pierwszej
nie
Złożone
Specjalne funkcje
MC
Polecenie to przestawia robota w sposób ciągły
przez zdefiniowane pozycje pomiędzy dwoma
określonymi pozycjami
nie
Złożone
Basic funkcje
MJ Obraca każdy wybrane połączenie o określony kąt
z aktualnej pozycji nie
Złożone
Basic funkcje
MO Przesuwa koniec chwytaka do określonej pozycji <M
OV>
Złożone
Basic funkcje
MP Przesuwa koniec chwytaka do punktu, którego
współrzędne i kąt są określone w instrukcji nie
Złożone
Basic funkcje
MS
Ustawia robota w określonej pozycji poprzez
określoną liczbę punktów pośrednich; ruch między
punktami po liniach prostych
nie
Złożone
Basic funkcje
MT
Przesunąć koniec chwytaka z aktualnej pozycji o
określoną liczbę jednostek w kierunku
wyznaczonym przez oś narzędzia
nie
Złożone
Basic funkcje
NT Ustawia robota w pozycji bazowej <NS
T>
Złożone
Basic funkcje
OG Ustawia robota w pozycji odniesienia w
kartezjańskim układzie współrzędnych
<OR
G>
Proste
Dodatkowe funkcje
PA Definiuje liczbę punktów w siatce kolumn i
wierszy dla określonej palety nie
Złożone
Specjalne funkcje
PC Kasuje współrzędne wybranej pozycji lub
wybranych współrzędnych
<P.
C>
Proste
Basic funkcje
PD Definiuje współrzędne i kąt pozycji o danym
numerze nie
Proste
Specjalne funkcje
PL Przyporządkowuje współrzędne jednej pozycji
drugiej pozycji nie
Proste
Specjalne funkcje
PT
Oblicza współrzędne siatki punktów na określonej
palecie oraz przypisuje współrzędne odnoszącym
się do danej palety
nie
Złożone
Specjalne funkcje
PX Zamienia współrzędne dwóch określonych pozycji
nie Proste
Specjalne funkcje
SF Zmienia współrzędne określonej pozycji o wartość
współrzędnych drugiego punktu nie
Proste
Specjalne funkcje
SP Ustawia prędkość oraz czas przyspieszenia i de
akceleracji robota nie
Złożone
Basic funkcje
TI Zatrzymuje ruch robota na określony czas nie Złożone

11
Basic funkcje
Tabela 5. Instrukcje programowe
Rozkaz Funkcja Ręczny
panel ster.
Funkcje
rozkazów
CP Ładuje wartość określonego licznika do
wewnętrznego rejestru porównawczego nie
Złożone
Dodatkowe funkcje
DA Wyłącza przerwanie wywoływane bitem z
zewnętrznego urządzenia nie
Złożone
Dodatkowe funkcje
DC Odejmuje l od wartości określonego licznika nie Złożone
Dodatkowe funkcje
DL Kasuje zawartość określonej linii lub
określonych linii nie
Proste
Basic funkcje
EA
Włącza przerwanie wywoływane bitem z
zewnętrznego urządzenia i określa numer
linii, do której następuje skok, gdy zostanie
podany sygnał
nie
Proste
ED Kończy program nie Złożone
Basic funkcje
EQ
Powoduje skok w programie, gdy zawartość
wewnętrznego rejestru jest równa
porównywanej wartości
nie
Złożone
Dodatkowe funkcje
GS Pozwala na skok do podprogramu, który
zaczyna się linią o określonym numerze nie
Złożone
Dodatkowe funkcje
GT Pozwała na nie uwarunkowany skok do
dowolnej linii programu nie
Złożone
Dodatkowe funkcje
IC Dodaje l do wartości określonego licznika nie Złożone
Dodatkowe funkcje
LG
Powoduje skok w programie, gdy zawartość
wewnętrznego rejestru jest większa od
porównywanej wartości
nie
Proste
NE
Powoduje skok w programie, gdy zawartość
wewnętrznego rejestru nie jest równa
porównywanej wartości
nie
Złożone
Dodatkowe funkcje
NW Kasuje cały program i dane dotyczące
pozycji nie
Proste
Basic funkcje
NX Określa zasięg pętli w programie
wykonywanej po poleceniu RC nie
Proste
Dodatkowe funkcje
RC Powtarza pętlę określoną przez polecenie
NX określoną liczbę razy nie
Tnie
Basic funkcje
RN Wykonuje określoną część instrukcji
programu nie
Proste
Basic funkcje
RT Kończy podprogram i wraca do programu
głównego nie
Złożone
Dodatkowe funkcje
S.C. Ładuje określoną wartość do określonego
licznika nie
Złożone
Dodatkowe funkcje
SM
Powoduje skok w programie, gdy zawartość
wewnętrznego rejestru jest mniejsza od
porównywanej wartości
nie
Złożone
Dodatkowe funkcje

12
Tabela 6. Instrukcje obsługi chwytaka
Rozkaz Funkcja Ręczny
panel ster. Funkcje rozkazów
GC Zamyka chwytak <O> Złożone
Basic funkcje
GF
Definiuje stan chwytaka
(zamknięty/otwarty) - używany
łącznie z poleceniem PD.
nie
Złożone
Basic funkcje
GO Otwiera chwytak >C< Złożone
Basic funkcje
GP
Definiuje siłę chwytu, gdy robot
zaopatrzony jest w chwytak
napędzany silnikiem
nie
Złożone
Specjalne funkcje

13
Problemy i zadania do rozwiązania:
o Narysować schemat kinematyczny manipulatora RV-M1.
o Obliczyć ruchliwość i manewrowość manipulatora RV-M1.
o Narysować schemat napędu górnego ramienia manipulatora.
o Narysować dowolny schemat kinematyczny chwytaka o równoległym ruchu
końcówek chwytnych – wyznaczyć liczbę stopni swobody układu
przeniesienia napędu.
o Narysować przestrzeń roboczą robota RV-M1.
o Narysować schemat kinematyczny oraz wyznaczyć manewrowość robota
umieszczonego na torze jezdnym (rysunek)
o Narysować schemat kinematyczny chwytaka robota RV-M1 (na rysunku
widok od czoła)

14
Dodatek
Instrukcja użytkowania programu COSIROP 95
Programowanie robota RV-M1 firmy Mitsubishi
Warszawa 2009