Metody Symulacyjne w Telekomunikacji (MEST) Wykład 4: Generowanie zdarzeń

BADANIA EKSPERYMENTALNE I SYMULACYJNE WĘŻYKOWANIA PRZEGUBOWYCH POJAZDÓW PRZEMYSŁOWYCH NA PODWOZIU
KOŁOWYM Część 1. Badania eksperymentalne
Piotr Dudziński, Aleksander Skurjat1
1 Prof. dr hab. inż. Piotr Dudziński, prof. zw. P. Wr. jest kierownikiem Zakładu Inżynierii Maszyn Roboczych i Pojazdów Przemysłowych Politechniki Wrocławskiej dr inż. Aleksander Skurjat jest adiunktem w Zakładzie Inżynierii Maszyn Roboczych i Pojazdów Przemysłowych Politechniki Wrocławskiej
WPROWADZENIE
W literaturze istnieje wiele umownych klasyfikacji
pojazdów, jak na przykład: pojazdy samochodowe, transportowe, terenowe, budowlane, komunalne, rolnicze, leśne, wojskowe, specjalne itp. W ostatnich latach, zwłaszcza w piśmiennictwie zagranicznym, np. „The Magazine for Industrial Vehicle Technology, Design & Engineering”, w celu usystematyzowania terminologii, stosowane jest powszechnie, dla grupy pojazdów nie samochodowych, określenie pojazdy przemysłowe. Do grupy pojazdów przemysłowych zaliczane są przede wszystkim mobile maszyny robocze (np. ładowarki), definiowane w zastosowaniach wojskowych jako maszyny inżynieryjne, oraz pojazdy transportowe (np. tzw. wozidła). W sumie jest to zbiór pojazdów od wózków widłowych, służących do mobilnego wewnątrzzakładowego transportu bliskiego dowolnej firmy, do pojazdów mających zastosowanie w określonych gałęziach przemysłu, np. w budownictwie, górnictwie, rolnictwie, leśnictwie itp. Mając na uwadze powyższe przesłanki, można sądzić, że w polskiej literaturze fachowej termin pojazdy przemysłowe znajdzie również swoje trwałe miejsce.
Jednym z aktualnych trendów w tej klasie
pojazdów jest wzrost ich mobilności czyli możliwości przemieszczania się z prędkościami 50-60 a nawet 100 km/h, np. wojskowe maszyny inżynieryjne [1-2]. Wymagania te ujawniły szereg nieznanych dotychczas problemów dynamicznych w tych pojazdach.
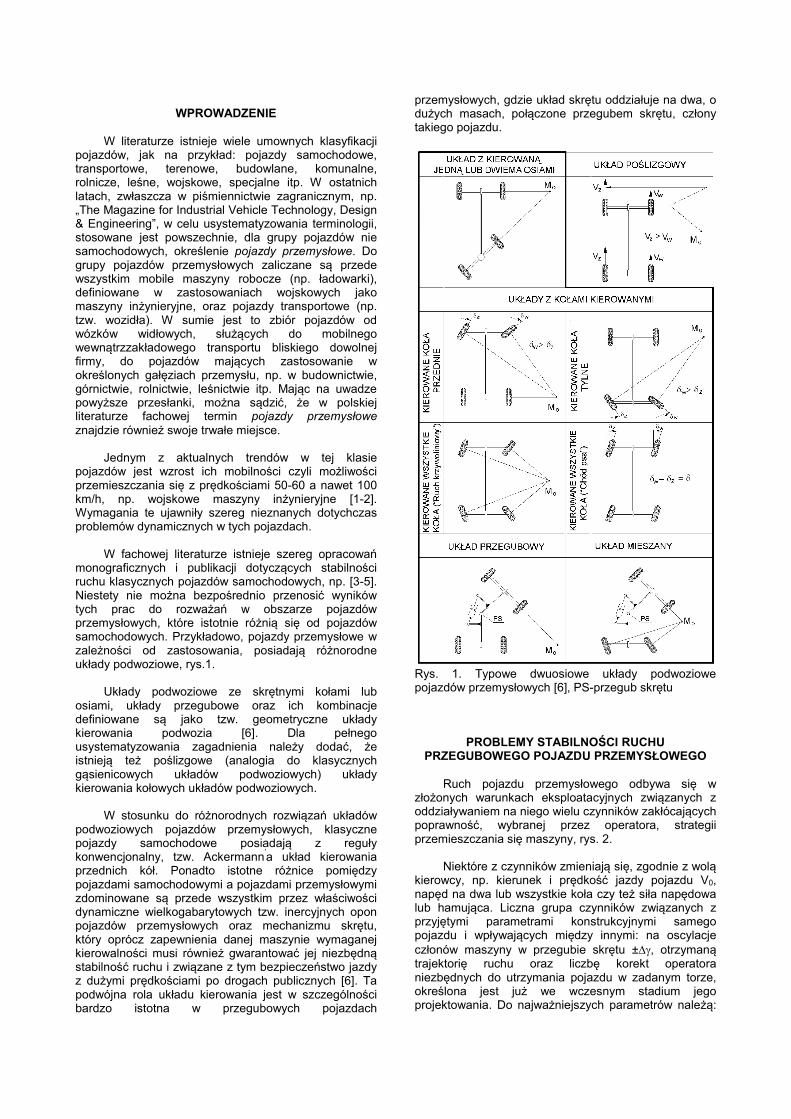
W fachowej literaturze istnieje szereg opracowań monograficznych i publikacji dotyczących stabilności ruchu klasycznych pojazdów samochodowych, np. [3-5]. Niestety nie można bezpośrednio przenosić wyników tych prac do rozważań w obszarze pojazdów przemysłowych, które istotnie różnią się od pojazdów samochodowych. Przykładowo, pojazdy przemysłowe w zależności od zastosowania, posiadają różnorodne układy podwoziowe, rys.1.
Układy podwoziowe ze skrętnymi kołami lub
osiami, układy przegubowe oraz ich kombinacje definiowane są jako tzw. geometryczne układy kierowania podwozia [6]. Dla pełnego usystematyzowania zagadnienia należy dodać, że istnieją też poślizgowe (analogia do klasycznych gąsienicowych układów podwoziowych) układy kierowania kołowych układów podwoziowych.
W stosunku do różnorodnych rozwiązań układów podwoziowych pojazdów przemysłowych, klasyczne pojazdy samochodowe posiadają z reguły konwencjonalny, tzw. Ackermann
’a układ kierowania
przednich kół. Ponadto istotne różnice pomiędzy pojazdami samochodowymi a pojazdami przemysłowymi zdominowane są przede wszystkim przez właściwości dynamiczne wielkogabarytowych tzw. inercyjnych opon pojazdów przemysłowych oraz mechanizmu skrętu, który oprócz zapewnienia danej maszynie wymaganej kierowalności musi również gwarantować jej niezbędną stabilność ruchu i związane z tym bezpieczeństwo jazdy z dużymi prędkościami po drogach publicznych [6]. Ta podwójna rola układu kierowania jest w szczególności bardzo istotna w przegubowych pojazdach
przemysłowych, gdzie układ skrętu oddziałuje na dwa, o dużych masach, połączone przegubem skrętu, człony takiego pojazdu.
Rys. 1. Typowe dwuosiowe układy podwoziowe pojazdów przemysłowych [6], PS-przegub skrętu
PROBLEMY STABILNOŚCI RUCHU PRZEGUBOWEGO POJAZDU PRZEMYSŁOWEGO
Ruch pojazdu przemysłowego odbywa się w
złożonych warunkach eksploatacyjnych związanych z oddziaływaniem na niego wielu czynników zakłócających poprawność, wybranej przez operatora, strategii przemieszczania się maszyny, rys. 2.
Niektóre z czynników zmieniają się, zgodnie z wolą
kierowcy, np. kierunek i prędkość jazdy pojazdu V0, napęd na dwa lub wszystkie koła czy też siła napędowa lub hamująca. Liczna grupa czynników związanych z przyjętymi parametrami konstrukcyjnymi samego pojazdu i wpływających między innymi: na oscylacje członów maszyny w przegubie skrętu ±∆, otrzymaną trajektorię ruchu oraz liczbę korekt operatora niezbędnych do utrzymania pojazdu w zadanym torze, określona jest już we wczesnym stadium jego projektowania. Do najważniejszych parametrów należą:
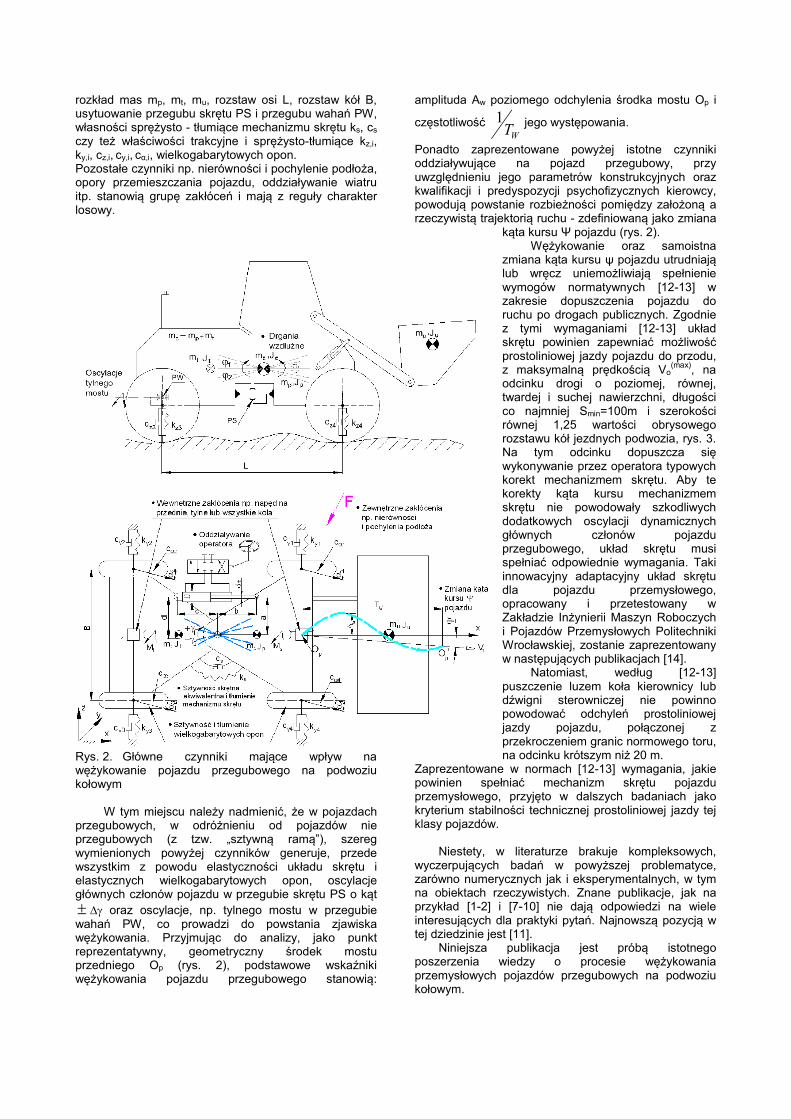
rozkład mas mp, mt, mu, rozstaw osi L, rozstaw kół B, usytuowanie przegubu skrętu PS i przegubu wahań PW, własności sprężysto - tłumiące mechanizmu skrętu ks, cs czy też właściwości trakcyjne i sprężysto-tłumiące kz,i, ky,i, cz,i, cy,i, cα,i, wielkogabarytowych opon. Pozostałe czynniki np. nierówności i pochylenie podłoża, opory przemieszczania pojazdu, oddziaływanie wiatru itp. stanowią grupę zakłóceń i mają z reguły charakter losowy.
Rys. 2. Główne czynniki mające wpływ na wężykowanie pojazdu przegubowego na podwoziu kołowym
W tym miejscu należy nadmienić, że w pojazdach przegubowych, w odróżnieniu od pojazdów nie przegubowych (z tzw. „sztywną ramą”), szereg wymienionych powyżej czynników generuje, przede wszystkim z powodu elastyczności układu skrętu i elastycznych wielkogabarytowych opon, oscylacje głównych członów pojazdu w przegubie skrętu PS o kąt
∆ oraz oscylacje, np. tylnego mostu w przegubie wahań PW, co prowadzi do powstania zjawiska wężykowania. Przyjmując do analizy, jako punkt reprezentatywny, geometryczny środek mostu przedniego Op (rys. 2), podstawowe wskaźniki wężykowania pojazdu przegubowego stanowią:
amplituda Aw poziomego odchylenia środka mostu Op i
częstotliwość WT
1 jego występowania.
Ponadto zaprezentowane powyżej istotne czynniki oddziaływujące na pojazd przegubowy, przy uwzględnieniu jego parametrów konstrukcyjnych oraz kwalifikacji i predyspozycji psychofizycznych kierowcy, powodują powstanie rozbieżności pomiędzy założoną a rzeczywistą trajektorią ruchu - zdefiniowaną jako zmiana
kąta kursu Ψ pojazdu (rys. 2). Wężykowanie oraz samoistna
zmiana kąta kursu ψ pojazdu utrudniają lub wręcz uniemożliwiają spełnienie wymogów normatywnych [12-13] w zakresie dopuszczenia pojazdu do ruchu po drogach publicznych. Zgodnie z tymi wymaganiami [12-13] układ skrętu powinien zapewniać możliwość prostoliniowej jazdy pojazdu do przodu, z maksymalną prędkością Vo
(max), na
odcinku drogi o poziomej, równej, twardej i suchej nawierzchni, długości co najmniej Smin=100m i szerokości równej 1,25 wartości obrysowego rozstawu kół jezdnych podwozia, rys. 3. Na tym odcinku dopuszcza się wykonywanie przez operatora typowych korekt mechanizmem skrętu. Aby te korekty kąta kursu mechanizmem skrętu nie powodowały szkodliwych dodatkowych oscylacji dynamicznych głównych członów pojazdu przegubowego, układ skrętu musi spełniać odpowiednie wymagania. Taki innowacyjny adaptacyjny układ skrętu dla pojazdu przemysłowego, opracowany i przetestowany w Zakładzie Inżynierii Maszyn Roboczych i Pojazdów Przemysłowych Politechniki Wrocławskiej, zostanie zaprezentowany w następujących publikacjach [14].
Natomiast, według [12-13] puszczenie luzem koła kierownicy lub dźwigni sterowniczej nie powinno powodować odchyleń prostoliniowej jazdy pojazdu, połączonej z przekroczeniem granic normowego toru, na odcinku krótszym niż 20 m.
Zaprezentowane w normach [12-13] wymagania, jakie powinien spełniać mechanizm skrętu pojazdu przemysłowego, przyjęto w dalszych badaniach jako kryterium stabilności technicznej prostoliniowej jazdy tej klasy pojazdów.
Niestety, w literaturze brakuje kompleksowych, wyczerpujących badań w powyższej problematyce, zarówno numerycznych jak i eksperymentalnych, w tym na obiektach rzeczywistych. Znane publikacje, jak na przykład [1-2] i [7-10] nie dają odpowiedzi na wiele interesujących dla praktyki pytań. Najnowszą pozycją w tej dziedzinie jest [11].
Niniejsza publikacja jest próbą istotnego poszerzenia wiedzy o procesie wężykowania przemysłowych pojazdów przegubowych na podwoziu kołowym.

Rys. 3. Wymagania, zgodnie z normami [12-13], dotyczące mechanizmu skrętu pojazdu przemysłowego na podwoziu kołowym BADANIA EKSPERYMENTALNE WŁAŚCIWOŚCI SPRĘŻYSTYCH MECHANIZMU SKRĘTU ORAZ OPON PRZEGUBOWEJ ŁADOWARKI ŁYŻKOWEJ
Eksperymentalne badania pilotujące, przeprowadzone w Zakładzie Inżynierii Maszyn Roboczych i Pojazdów Przemysłowych Politechniki Wrocławskiej na przegubowej ładowarce Ł220, będącej na wyposażeniu Zakładu, potwierdziły istotny wpływ na proces stabilności jazdy takiego pojazdu podatności mechanizmu skrętu jak również podatności wielkogabarytowych opon. Badania przeprowadzano, podczas jazdy maszyny z różnymi prędkościami, na podłożu betonowym. Jako wymuszenie kinematyczne zastosowano przeszkodę o wymiarach jak na rys. 4.
Rys. 4. Schemat zastosowanego toru do badań procesu wężykowania przegubowej ładowarki Ł220
W celu identyfikacji wpływu tylko mechanizmu skrętu na proces wężykowania, stosowano podczas badań również mechaniczną blokadę tego mechanizmu, uzyskując, na czas takiego wariantu pomiaru, pojazd z tzw. ramą sztywną. Podczas eksperymentalnych badań procesu wężykowania ładowarki przegubowej mierzono oscylacje kątowe ± członów maszyny w przegubie skrętu, siły (za pomocą specjalnych sworzni pomiarowych [15]) w siłownikach skrętu, przemieszczenia tłoczysk tych siłowników, moment generowany w mechanizmie skrętu jak również zmianę kąta kursu maszyny.
Sumaryczną (ekwiwalentną) sztywność mechanizmu skrętu ks ładowarki Ł220 wyznaczano na postoju maszyny, generując znany moment MS w przegubie skrętu, oraz mierząc kąt wychylenia (skrętu) członów tego pojazdu. Pomiary realizowano z uwzględnieniem i bez uwzględnienia elastycznych przewodów hydraulicznych jak również z uwzględnieniem i bez uwzględnienia kontaktu z podłożem wielkogabarytowych opon maszyny, rys.5.
Zaprezentowane wyniki badań eksperymentalnych wykazały bardzo istotny wpływ podatności przewodów hydraulicznych oraz podatności wielkogabarytowych opon na sumaryczną (ekwiwalentną) sztywność kS mechanizmu skrętu a w związku z tym również na proces wężykowania tej klasy pojazdów.
Rys. 5. Wyniki badań eksperymentalnych sumarycznej (ekwiwalentnej) sztywności mechanizmu skrętu kS ładowarki Ł220 z udziałem i bez udziału elastycznych przewodów hydraulicznych oraz z udziałem i bez udziału kontaktu wielkogabarytowych opon z podłożem
Niestety w dostępnej literaturze i katalogach firm z
elastycznymi przewodami hydraulicznymi brak jest informacji dotyczących zmian ich objętości („puchnięcia”) w funkcji ich geometrii i ciśnienia wewnątrz przewodu. W tym celu na specjalnym stanowisku badawczym wykonano badania różnych rodzajów przewodów i o różnej ich geometrii: z jedną warstwą osnowy (1SN), z dwoma warstwami osnowy (2SN), o średnicach nominalnych DN10, DN16, DN20 oraz o długości L=0,45 m, L=0,60 m, L=0,64 m L=0,84 m [11]. Podczas pomiarów badano przewody proste oraz zakrzywione normatywnym promieniem, przy czym wyniki tych pomiarów były zbliżone.
W celu ilościowej oceny podatności powyższych przewodów wprowadzono wskaźnik rozszerzalności objętościowej przewodu p, zdefiniowany jako:
0V
Vpp
1)
przy czym: V0 – początkowa wewnętrzna objętość przewodu [m
3],
∆Vp – zmiana wewnętrznej objętości przewodu w wyniku działania ciśnienia pw czynnika roboczego [m
3].
Wobec powyższego moduł sprężystości objętościowej Bp przewodu, ze względu na nieliniowość zjawiska, można zdefiniować jako [6]:
- styczny moduł sprężystości objętościowej
p
wp
pB
(2)
lub - sieczny moduł sprężystości objętościowej
p
wp
pB
(3)
gdzie: pw – ciśnienie wewnętrzne w przewodzie [N/m
2]
Oczywiście w badaniach uwzględniono również zjawisko ściśliwości cieczy roboczej, którą można zdefiniować następująco:
c
wc
B
pVV 0 (4)
przy czym: ∆Vc - ilość czynnika roboczego niezbędna do kompensacji ściśliwości cieczy roboczej [m
3],
Bc - moduł sprężystości objętościowej cieczy roboczej [N/m
2].
Natomiast, ze względu na to, że moduł sprężystości Est przewodów stalowych jest ok. 200 razy większy od modułu sprężystości Bp przewodów elastycznych, dla typowych ciśnień w układzie hydraulicznym skrętu pojazdu, można go w badaniach pominąć.
Wybrane wyniki badań eksperymentalnych przedstawiono na rys. 6 i rys. 7.
Rys. 6. Wyniki badań wskaźnika rozszerzalności objętościowej p przewodów elastycznych w funkcji ciśnienia pw cieczy roboczej dla różnych ich rozwiązań, o jednej warstwie osnowy (1SN) i o dwóch warstwach osnowy (2SN), oraz różnej ich średnicy i długości
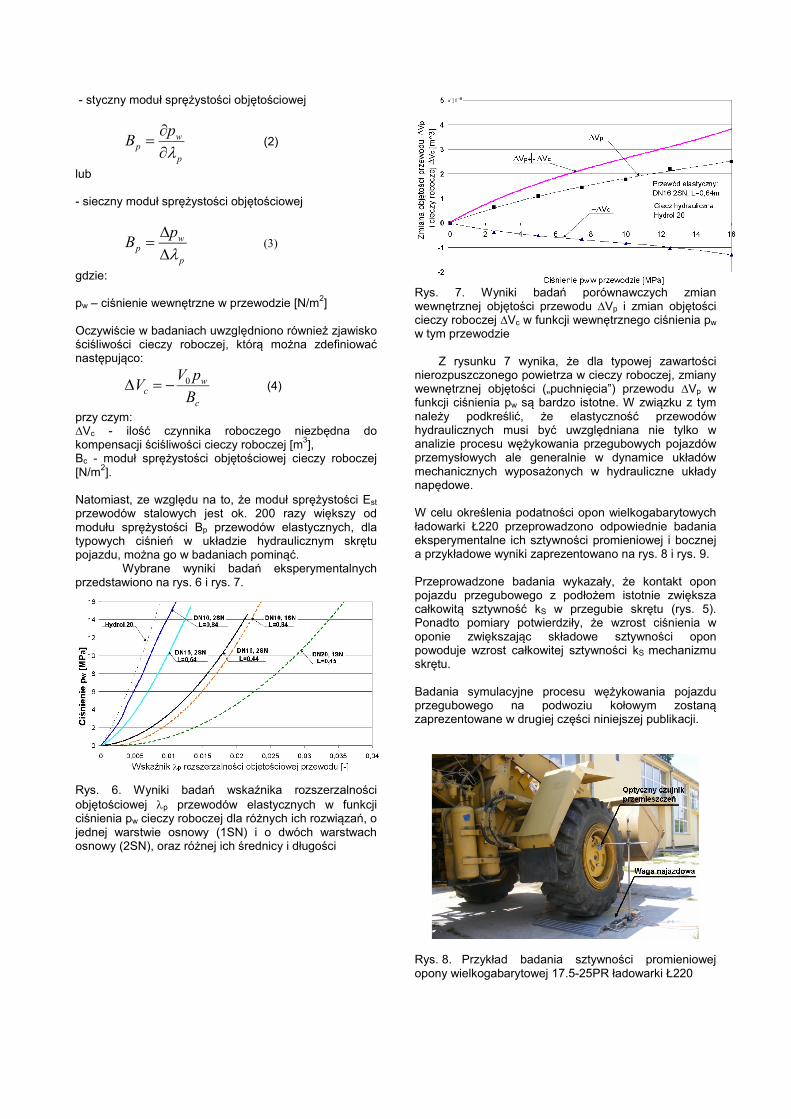
Rys. 7. Wyniki badań porównawczych zmian wewnętrznej objętości przewodu ∆Vp i zmian objętości cieczy roboczej ∆Vc w funkcji wewnętrznego ciśnienia pw w tym przewodzie
Z rysunku 7 wynika, że dla typowej zawartości
nierozpuszczonego powietrza w cieczy roboczej, zmiany wewnętrznej objętości („puchnięcia”) przewodu ∆Vp w funkcji ciśnienia pw są bardzo istotne. W związku z tym należy podkreślić, że elastyczność przewodów hydraulicznych musi być uwzględniana nie tylko w analizie procesu wężykowania przegubowych pojazdów przemysłowych ale generalnie w dynamice układów mechanicznych wyposażonych w hydrauliczne układy napędowe.
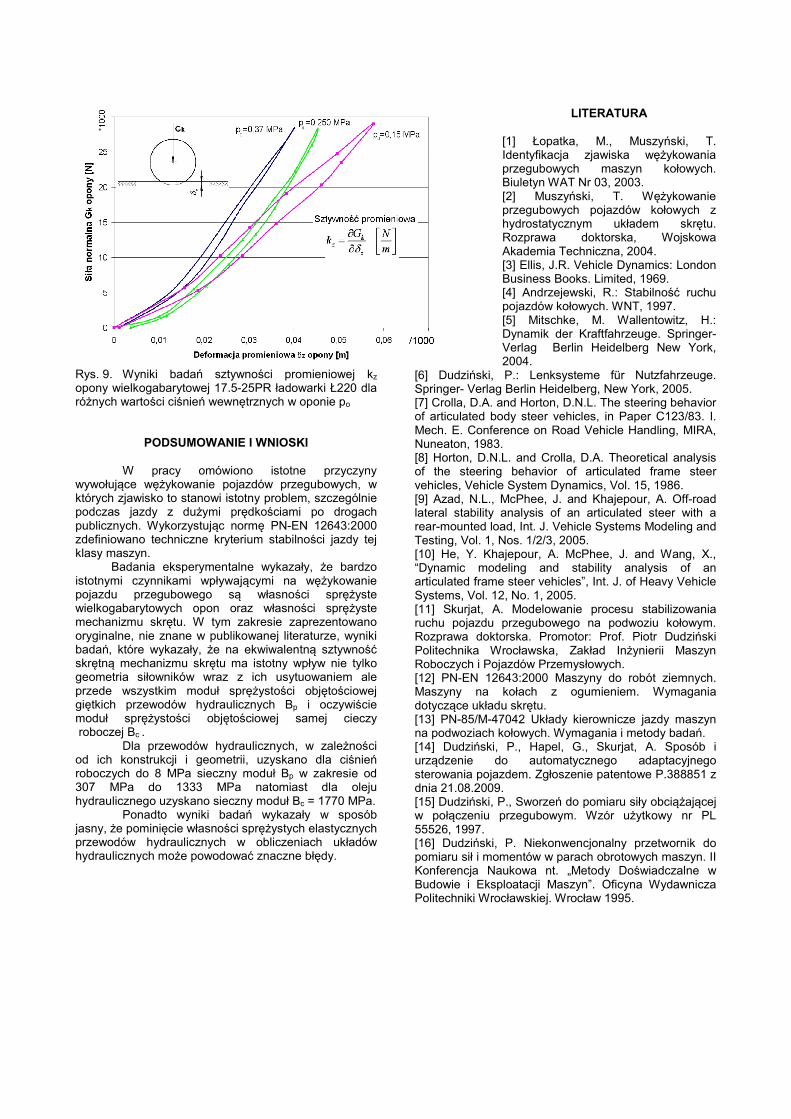
W celu określenia podatności opon wielkogabarytowych ładowarki Ł220 przeprowadzono odpowiednie badania eksperymentalne ich sztywności promieniowej i bocznej a przykładowe wyniki zaprezentowano na rys. 8 i rys. 9. Przeprowadzone badania wykazały, że kontakt opon pojazdu przegubowego z podłożem istotnie zwiększa całkowitą sztywność kS w przegubie skrętu (rys. 5). Ponadto pomiary potwierdziły, że wzrost ciśnienia w oponie zwiększając składowe sztywności opon powoduje wzrost całkowitej sztywności kS mechanizmu skrętu. Badania symulacyjne procesu wężykowania pojazdu przegubowego na podwoziu kołowym zostaną zaprezentowane w drugiej części niniejszej publikacji.
Rys. 8. Przykład badania sztywności promieniowej opony wielkogabarytowej 17.5-25PR ładowarki Ł220
Rys. 9. Wyniki badań sztywności promieniowej kz opony wielkogabarytowej 17.5-25PR ładowarki Ł220 dla różnych wartości ciśnień wewnętrznych w oponie po
PODSUMOWANIE I WNIOSKI W pracy omówiono istotne przyczyny wywołujące wężykowanie pojazdów przegubowych, w których zjawisko to stanowi istotny problem, szczególnie podczas jazdy z dużymi prędkościami po drogach publicznych. Wykorzystując normę PN-EN 12643:2000 zdefiniowano techniczne kryterium stabilności jazdy tej klasy maszyn.
Badania eksperymentalne wykazały, że bardzo istotnymi czynnikami wpływającymi na wężykowanie pojazdu przegubowego są własności sprężyste wielkogabarytowych opon oraz własności sprężyste mechanizmu skrętu. W tym zakresie zaprezentowano oryginalne, nie znane w publikowanej literaturze, wyniki badań, które wykazały, że na ekwiwalentną sztywność skrętną mechanizmu skrętu ma istotny wpływ nie tylko geometria siłowników wraz z ich usytuowaniem ale przede wszystkim moduł sprężystości objętościowej giętkich przewodów hydraulicznych Bp i oczywiście moduł sprężystości objętościowej samej cieczy roboczej Bc .
Dla przewodów hydraulicznych, w zależności od ich konstrukcji i geometrii, uzyskano dla ciśnień roboczych do 8 MPa sieczny moduł Bp w zakresie od 307 MPa do 1333 MPa natomiast dla oleju hydraulicznego uzyskano sieczny moduł Bc = 1770 MPa. Ponadto wyniki badań wykazały w sposób jasny, że pominięcie własności sprężystych elastycznych przewodów hydraulicznych w obliczeniach układów hydraulicznych może powodować znaczne błędy.
LITERATURA
[1] Łopatka, M., Muszyński, T. Identyfikacja zjawiska wężykowania przegubowych maszyn kołowych. Biuletyn WAT Nr 03, 2003. [2] Muszyński, T. Wężykowanie przegubowych pojazdów kołowych z hydrostatycznym układem skrętu. Rozprawa doktorska, Wojskowa Akademia Techniczna, 2004. [3] Ellis, J.R. Vehicle Dynamics: London Business Books. Limited, 1969. [4] Andrzejewski, R.: Stabilność ruchu pojazdów kołowych. WNT, 1997. [5] Mitschke, M. Wallentowitz, H.: Dynamik der Kraftfahrzeuge. Springer-Verlag Berlin Heidelberg New York, 2004.
[6] Dudziński, P.: Lenksysteme für Nutzfahrzeuge. Springer- Verlag Berlin Heidelberg, New York, 2005. [7] Crolla, D.A. and Horton, D.N.L. The steering behavior of articulated body steer vehicles, in Paper C123/83. I. Mech. E. Conference on Road Vehicle Handling, MIRA, Nuneaton, 1983. [8] Horton, D.N.L. and Crolla, D.A. Theoretical analysis of the steering behavior of articulated frame steer vehicles, Vehicle System Dynamics, Vol. 15, 1986. [9] Azad, N.L., McPhee, J. and Khajepour, A. Off-road lateral stability analysis of an articulated steer with a rear-mounted load, Int. J. Vehicle Systems Modeling and Testing, Vol. 1, Nos. 1/2/3, 2005. [10] He, Y. Khajepour, A. McPhee, J. and Wang, X., “Dynamic modeling and stability analysis of an articulated frame steer vehicles”, Int. J. of Heavy Vehicle Systems, Vol. 12, No. 1, 2005. [11] Skurjat, A. Modelowanie procesu stabilizowania ruchu pojazdu przegubowego na podwoziu kołowym. Rozprawa doktorska. Promotor: Prof. Piotr Dudziński Politechnika Wrocławska, Zakład Inżynierii Maszyn Roboczych i Pojazdów Przemysłowych. [12] PN-EN 12643:2000 Maszyny do robót ziemnych. Maszyny na kołach z ogumieniem. Wymagania dotyczące układu skrętu. [13] PN-85/M-47042 Układy kierownicze jazdy maszyn na podwoziach kołowych. Wymagania i metody badań. [14] Dudziński, P., Hapel, G., Skurjat, A. Sposób i urządzenie do automatycznego adaptacyjnego sterowania pojazdem. Zgłoszenie patentowe P.388851 z dnia 21.08.2009. [15] Dudziński, P., Sworzeń do pomiaru siły obciążającej w połączeniu przegubowym. Wzór użytkowy nr PL 55526, 1997. [16] Dudziński, P. Niekonwencjonalny przetwornik do pomiaru sił i momentów w parach obrotowych maszyn. II Konferencja Naukowa nt. „Metody Doświadczalne w Budowie i Eksploatacji Maszyn”. Oficyna Wydawnicza Politechniki Wrocławskiej. Wrocław 1995.

Dudziński P., Skurjat A.: BADANIA EKSPERYMENTALNE I SYMULACYJNE WĘŻYKOWANIA
PRZEGUBOWYCH POJAZDÓW PRZEMYSŁOWYCH NA PODWOZIU KOŁOWYM Część 1. Badania eksperymentalne
Słowa kluczowe: pojazdy przegubowe, wężykowanie, badania eksperymentalne, podatność układu
skrętu, podatność opon,
W artykule scharakteryzowano problem wężykowania pojazdów przegubowych podczas jazdy z dużymi prędkościami w aspekcie, zdefiniowanego odpowiednimi normami, bezpieczeństwa jazdy po drogach publicznych. Przeprowadzone badania eksperymentalne wykazały, że do głównych czynników, mających dominujący wpływ na stabilność jazdy tej klasy pojazdów należą: podatność mechanizmu skrętu - w tym elastycznych przewodów hydraulicznych i cieczy roboczej oraz podatność wielkogabarytowych opon. W artykule zamieszczono szereg oryginalnych, nieznanych dotąd w literaturze, wyników badań eksperymentalnych z tego zakresu. Dudziński P., Skurjat A. : EXPERIMENTAL AND SIMULATION STUDIES ON SNAKING MOVEMENT
OF WHEELED ARTICULATED BODY STEER VEHICLES Part. 1. Experimental studies
Key words: articulated body steer vehicles, snaking, experimental studies, elasticity of steering gear, Elasticity of multi-dimensional tyres
The paper characterizes snaking movement of articulated body steer vehicles during high speed travel in terms of travel safety norms on public roads. The experimental studies established that the main factors which have significant effect on travel stability for this type of vehicles are: steering gear elasticity – including elastic hydraulic pipes and hydraulic fluid and the elasticity of multi-dimensional tyres. The paper presents a number of respective original results of experimental studies, unknown in the subject literature so far.











![BADANIA EKSPERYMENTALNE I MODELOWANIE …rozszerzeniem kryterium płynięcia von Misesa poprzez wprowadzenie naprężeń hydrostatycznych do naprężeń ekwiwalentnych. Motz i Pippan[9]](https://static.fdocuments.pl/doc/165x107/5e493bd2c6002c0d3224f157/badania-eksperymentalne-i-modelowanie-rozszerzeniem-kryterium-pynicia-von-misesa.jpg)
![BADANIA SYMULACYJNE I STANOWISKOWE SILNIKA PMSM … · SMwsa 200 S-4 są następujące [2]: Pn - 18kW Un - 88V In - 140A fn - 50Hz nn - 1500obr./min. Mn - 115Nm 2. Badania symulacyjne](https://static.fdocuments.pl/doc/165x107/5f6671858ec1b252631898d6/badania-symulacyjne-i-stanowiskowe-silnika-pmsm-smwsa-200-s-4-s-nastpujce.jpg)