Autoreferat ROZPRAWY DOKTORSKIEJ · ∆I −i j =κ( ) ij k ⋅∆Ik (4.1) gdzie: κ( ) ij k -...
32
POLITECHNIKA WARSZAWSKA Wydzial Elektryczny Autoreferat ROZPRAWY DOKTORSKIEJ mgr inż. Konrad Gryszpanowicz Badanie i poprawa stabilności systemu elektroenergetycznego na etapie planowania jego rozwoju Promotor Dr hab. inż. Sylwester Robak, Prof. nzw. PW Warszawa 2016
Transcript of Autoreferat ROZPRAWY DOKTORSKIEJ · ∆I −i j =κ( ) ij k ⋅∆Ik (4.1) gdzie: κ( ) ij k -...

POLITECHNIKA WARSZAWSKA Wydział Elektryczny
Autoreferat ROZPRAWY DOKTORSKIEJ
mgr inż. Konrad Gryszpanowicz
Badanie i poprawa stabilności systemu elektroenergetycznego na etapie planowania jego rozwoju
Promotor Dr hab. inż. Sylwester Robak, Prof. nzw. PW
Warszawa 2016

2
1 WSTĘP System elektroenergetyczny (SEE) jest bardzo złożonym obiektem, podlegającym nieustannemu rozwojowi i modernizacji mającym na celu dostosowywanie się do rosnących potrzeb odbiorców energii elektrycznej przy zapewnieniu bezpiecznej pracy i zachowaniu wymaganej jakości energii elektrycznej (w tym niezawodności dostawy). W takim żywym i bardzo złożonym organizmie zachodzą procesy adaptacji, samo-organizacji i ewolucji, mające dostosować parametry, strukturę i przeznaczenie systemu do zmieniających uwarunkowań technicznych. W systemie elektroenergetycznym ryzyko nietrafionych inwestycji jest większe niż po stronie konsumentów energii elektrycznej. Niezmiennie ważne jest więc odpowiednie dostosowywanie struktury i funkcjonalności elementów SEE do pełnienia podstawowej roli i utrzymania odpowiednich marginesów bezpieczeństwa. System elektroenergetyczny jest wyposażony w rozmaite urządzenia przeznaczone do ochrony przed skutkami zakłóceń (zabezpieczenia), regulacji automatycznej (automatyka regulacyjna), sterowania elementami SEE (automatyka sterownicza), a także ośrodków nadzoru i monitorowania pracy (dyspozytorskie centra sterowania). Wszystkie wymienione urządzenia pozwalają na bezpieczną pracę SEE w stanach normalnych oraz w przypadku powstania typowych zakłóceń. Po ich wystąpieniu, w wyniku działania zabezpieczeń następuje wyłączenie uszkodzonego elementu SEE, zaś automatyka regulacyjna, korygowana działaniami dyspozytorów sprowadza SEE do pożądanego stanu normalnego. Mimo istnienia wymienionych urządzeń nietypowe silne zakłócenia lub pojawiające się stany nienormalne pracy SEE mogą doprowadzić do awarii systemowej polegającej na utracie zdolności SEE do zasilania odbiorców na dużym obszarze lub nawet w całym SEE. Przykładami zjawisk prowadzących do awarii systemowych mogą być:
• utrata stabilności napięciowej objawiająca się nadmiernym zmniejszeniem napięć w sieci, a w skrajnym przypadku ich załamaniem (lawina napięcia),
• utrata stabilności kątowej objawiająca się utratą synchronizmu generatorów synchronicznych,
• kaskadowe wyłączenie elementów sieci i utrata integralności sieci przesyłowej (rozpadnięcie się sieci przesyłowej),
• utrata stabilności częstotliwościowej objawiająca się nadmiernym zmniejszeniem częstotliwości w SEE, a w skrajnym przypadku jej załamaniem (lawina częstotliwości).
Przeciwdziałanie zjawiskom utraty stabilności SEE należy podejmować na każdym możliwym etapie, a więc w trakcie planowania rozwoju SEE, w trakcie wdrażania poszczególnych inwestycji w sektorze wytwarzania i inwestycjach sieciowych, w trakcie eksploatacji SEE. Należy tu podkreślić, że wszelkie środki poprawy stabilności (zarówno sieciowe jak i elektrowniane) powinny być traktowane jako środki dodatkowe poprawiające stabilność i łagodzące stany nieustalone, a nie środki zapewniające stabilność. Stabilność SEE przy typowych zakłóceniach powinna być zapewniona przez rozwój sieci stosowny do rozwoju sektora wytwarzania. Tak więc podstawową drogą zapewnienia bezpiecznej pracy SEE powinno być planowanie rozwoju sieci przesyłowej dostosowane do planowania wzrostu zapotrzebowania i planowanych inwestycji w sektorze wytwarzania. Mimo istnienia obszernej literatury dotyczącej analiz statycznych i dynamicznych wykonywanych na potrzeby planowania rozwoju SEE oraz dużych wieloletnich doświadczeń w wykonywaniu tych analiz w tej dziedzinie nadal istnieją zagadnienia wymagające rozwiązania.

3
2 CEL I TEZA PRACY Zasadniczym celem tej rozprawy jest zidentyfikowanie zagadnień wymagających rozwiązania i zaproponowanie odpowiednich rozwiązań a także ich praktyczne zweryfikowanie w ramach analiz wykonywanych na rzecz PSE SA dotyczących rozwoju KSE w najbliższych latach. W oparciu o krytyczny przegląd literatury oraz analizy KSE wykonane przez autora tej rozprawy formułuje się następujące tezy: (a) Istniejące rozwiązania automatyki odciążającej można udoskonalić stosując
algorytmy decyzyjne opracowane w tej rozprawie oparte na identyfikowaniu współczynników węzłowo - gałęziowych (współczynniki odciążania).
(b) Wyłączanie części generatorów jako środek przeciwdziałania utracie synchronizmu nie jest skuteczne w przypadku zwarć likwidowanych z opóźnieniem wywołanym awarią wyłącznika lub zabezpieczeń.
(c) W przypadku zwarć likwidowanych z opóźnieniem skutecznym sposobem ograniczenia liczby zespołów wytwórczych tracących synchronizm może być szybka zmiana konfiguracji sieci polegająca na szybkim podziale sekcji szyn stacji lub przyspieszonym wykonaniu operacji lokalnej rezerwy wyłącznikowej. Działanie takie można zrealizować za pomocą specjalnych sygnałów zaproponowanych w tej rozprawie.
(d) Załączanie rezystorów szeregowych może być skutecznym sposobem przeciwdziałania utracie synchronizmu w przypadku zwarć likwidowanych z opóźnieniem wywołanym awarią wyłącznika. Znaczące zwiększenie krytycznego czasu trwania zwarcia tą metodą można uzyskać stosując algorytm aktywacji rezystora szeregowego zaproponowany w tej rozprawie.
3 ASPEKTY PLANOWANIA W LITERATURZE Badania zachowania się SEE pod wpływem rozmaitych zdarzeń (zakłóceń i ich likwidacji) można podzielić na statyczne i dynamiczne. Z przeglądu literatury wynika, że zakres badań statycznych i dynamicznych SEE wykonywanych na potrzeby planowania rozwoju i/lub pracy SEE zależy od przyjmowanego horyzontu czasowego. Ogólnie im dłuższy horyzont czasowy tym większy nacisk kładzie się na badanie wystarczalności mocy wytwórczych na pokrycie zapotrzebowania, zaś mniejszy nacisk kładzie się na badania sieciowe i systemowe polegające na analizie zachowania się SEE pod wpływem zakłóceń i ich likwidacji.
3.1 Horyzont czasowy analiz i raportowanie Najwięcej analiz dynamiki SEE (i w tym stabilności) wykonuje się w planowaniu operacyjnym i krótkookresowym (horyzont do 3-5 lat) oraz planowaniu średniookresowym (horyzont do 10-15 lat). W planowaniu długookresowym (horyzont 15-30 lat) badań dynamiki SEE nie przeprowadza się lub przeprowadza sporadycznie w bardzo ograniczonym zakresie.
3.2 Kryteria planowania ogólnie Poprzez "kryteria planowania" (ang. planning criteria) rozumie się następujący zestaw: (a) standardy akceptowalnego zachowania się SEE, (b) wiarygodne zdarzenia (zakłócenia i ich sposoby likwidacji), (c) dopuszczalne działania regulacyjne (działania systemowe łagodzące skutki zdarzeń).

4
3.2.1 Ogólne sformułowanie standardów Ogólne standardy zachowania się SEE pod wpływem zdarzeń formułowane są zwykle w postaci kilku postulatów. Łącznie, po przeanalizowaniu literatury, można wymienić następujące postulaty:
• nie występowanie przeciążeń termicznych elementów sieci (przeciążenia krótkotrwałe i długotrwałe),
• ograniczenie zmian wartości napięć w węzłach (zmiany statyczne i dynamiczne), • ograniczenie przejściowego obniżenia się częstotliwości i czasu trwania tego
obniżenia, • brak lub zminimalizowanie ograniczeń zasilania odbiorców (usługi przesyłowe
gwarantowane, gwarantowane warunkowo, nie gwarantowane), • zachowanie stabilności napięciowej (odbiorów lub obszarów odbiorczych)
z odpowiednim zapasem stabilności, • zachowanie stabilności kątowej lokalnej z odpowiednim zapasem stabilności oraz
zapewnienie odpowiedniego tłumienia kołysań mocy, • zachowanie stabilności kątowej przejściowej z odpowiednim zapasem stabilności, • nie występowanie kaskadowych wyłączeń.
Trzeba tu jednak podkreślić, że nie wszystkie dokumenty zajmują się wszystkimi wyżej wymienionymi postulatami. Niektóre dokumenty koncentrują się tylko na kilku postulatach, a pozostałe postulaty omawiają tylko pobieżnie. 3.2.2 Przeciążenia termiczne Postulat nie występowania i/lub ograniczenia przeciążeń termicznych elementów sieci w kryteriach planowania jest jednym z głównych postulatów odnoszących się do stanów ustalonych sprawdzanych w ramach analiz statycznych. W licznych dokumentach (w tym amerykańskich) wprowadza się pojęcie dopuszczalnego obciążenia termicznego normalnego oraz awaryjnego. Dopuszczalne obciążenie termiczne normalne (ang. normal thermal ratings) zakłada brak zagrożenia uszkodzenia danego elementu SEE oraz skrócenia czasu jego życia. Dopuszczalne obciążenie termiczne awaryjne (ang. emergency thermal ratings) dopuszcza częściowe skrócenie czasu życia elementu lub jego osłabienie przy założeniu ograniczonego czasu pracy przy tym obciążeniu.
3.2.3 Stabilność kątowa przejściowa Badanie stabilności kątowej przejściowej (równowagi dynamicznej) metodą komputerowej symulacji stanów nieustalonych jest zalecane przez większość instrukcji i standardów na świecie. Najdłuższy czas trwania zwarcia, dla którego układ jest jeszcze stabilny nazywa się krytycznym czasem trwania zwarcia i oznacza krt . Dla danego czasu likwidacji zwarcia określa się współczynnik zapasu stabilności w następujący sposób:
zw
zwkrt t
ttk
−= (3.1)
gdzie, kt≥(10÷20), tkr - krytyczny czas trwania zwarcia, tzw- rzeczywisty czas likwidacji zwarcia.
3.3 ZDARZENIA PLANISTYCZNE I EKSTREMALNE Dla potrzeb analiz związanych z planowaniem rozwoju SEE zdarzenia można podzielić (jak w Tab. 3.1) na:
• zdarzenia prawdopodobne (wiarygodne), • zdarzenia mniej prawdopodobne (mniej wiarygodne), • zdarzenia ekstremalne (mało prawdopodobne).

5
Zdarzenia prawdopodobne (wiarygodne) oraz mniej prawdopodobne (mniej wiarygodne) nazywa się zdarzeniami planistycznymi.
Tab. 3.1. Klasyfikacja zdarzeń Rodzaj zdarzenia Spełnienie standardów Wykonywanie analiz
planistyczne prawdopodobne wymagane
obligatoryjne w pełnym zakresie mniej prawdopodobne wymagane z uwzględnieniem działań regulacyjnych
ekstremalne mało prawdopodobne zalecane ale nie wymagane zalecane w ograniczonym zakresie
3.4 DZIAŁANIA ZARADCZE I REGULACYJNE Działania zaradcze - wszystkie możliwe i ekonomicznie opłacalne czynności (w tym także inwestycje), które można podjąć dla poprawy bezpieczeństwa pracy SEE w przypadku stwierdzenia takiej potrzeby. Przykładami działań zaradczych mogą być:
• Zainstalowanie nowych, modyfikacja lub wycofanie starych urządzeń przesyłowych i/lub wytwórczych,
• Zainstalowanie nowych, modyfikacja lub wycofanie starych zabezpieczeń elektroenergetycznych,
• Zainstalowanie lub modyfikacja automatyki przeciwawaryjnej (typu APK, BR, FV, przyspieszenie działania zabezpieczeń i/lub LRW dla bliskich zwarć K3) w celu złagodzenia zagrożenia stabilności SEE po zdarzeniach wielokrotnych,
• Zainstalowanie lub modyfikacja automatyki odciążania podnapięciowego SNO i częstotliwościowego SCO,
• Zainstalowanie urządzeń FACTS do szybkiej regulacji przepływów w sieciach i poprawy stabilności,
• Wprowadzenie szczególnych procedur ruchowych z podaniem jak długo będą one obowiązywały w ramach planu działań zaradczych,
• Aktywne zarządzanie stroną wytwórczą i popytową (ang. demand side management), • Nowe technologie, inne inicjatywy.
Działania regulacyjne - wszystkie możliwe działania automatyczne oraz ręczne, które można podjąć po wystąpieniu zdarzenia dla złagodzenia jego skutków i poprawy zachowania się SEE. Zalicza się tu następujące działania:
• wyłączenia części odbiorów za pomocą automatyki odciążania częstotliwościowego SCO i/lub napięciowego SNO,
• zmiany połączeń sekcji szyn stacji lub konfiguracji sieci, • wyłączenia części generatorów po zwarciu dla ratowania synchronizmu generatorów
pozostałych (ang. generator tripping) nazywane w Polsce APK (automatyka przeciwkołysaniowa),
• szybkie regulowanie turbin parowych FV (ang. fast valving) polegające na chwilowym zamknięciu zaworów turbiny po wystąpieniu zwarcia,
• krótkotrwałe załączanie rezystorów hamujących BR (ang. braking resistors) w celu ratowania synchronizmu po wystąpieniu zwarcia (zwłaszcza hydrogeneratorów).
4 Automatyka odciążająca Automatyka odciążająca (AO) jest środkiem zaradczym, który można stosować dla poprawy bezpieczeństwa SEE przy zdarzeniach wielokrotnych polegających na wyłączeniu więcej niż jednego elementu sieci. Takie zdarzenia zalicza się do zdarzeń ekstremalnych.

6
Zadaniem automatyki odciążającej jest likwidowanie dużych przeciążeń sieci, zwłaszcza linii wyprowadzenia mocy z elektrowni. Odciążanie sieci może być dokonywane zarówno przez wyłączanie części generatorów jak również regulację wartości zadanej mocy turbin wykorzystywaną w regulacji wtórnej mocy i częstotliwości. Efektywność odciążania gałęzi sieci (linia lub transformator) można określić w następujący sposób:
kkijji II ∆⋅=∆ − )(κ (4.1)
gdzie: kij)(κ - współczynnik węzłowo-gałęziowy, ijI∆ - zmiana prądu w gałęzi łączącej węzły
i,j, kI∆ - zmiana prądu w k-tym węźle tj. prądu zespołów wytwórczych.
4.1 Algorytm AO z pomiarem prądów bez predykcji Na potrzeby opisania algorytmu decyzyjnego AO wprowadza się następujące oznaczenia:
dI - obciążalność długotrwała (wartości prądu zależne od temperatury otoczenia zadane
charakterystykami np. w postaci prostych łamanych),
aI , at - obciążalność awaryjna (wartości prądu i dopuszczalny czas obciążenia).
W tym wariancie zakłada się, że automatyka odciążająca AO działa na zasadzie pomiaru prądów w wytypowanych elementach sieci wyprowadzającej moc z elektrowni. Prądy zmierzone w elementach sieci Ipom są porównywane do wartości obciążalności długotrwałej Id oraz obciążalności awaryjnej Ia przy zdanym czasie ta. Przewiduje się trzy warianty wprowadzania danych liczbowych o obciążalności długotrwałej i awaryjnej:
• Dla danej temperatury otoczenia wartości dotyczące Id, Ia, ta będą odczytywane z charakterystyk temperaturowych (temperatura otoczenia),
• Wartości obciążalności Id, Ia, ta będą zadawane jako dane stałe w całym zakresie zmiany temperatury otoczenia,
• Wartości Id, Ia, ta będą wczytywane z zewnętrznego dla AO systemu monitorowania i diagnostyki (na razie tylko dla transformatorów, ale w przyszłości może także i dla linii przesyłowych).
Charakterystyki temperaturowe w postaci prostych łamanych oraz wartości stałe dla obciążalności będą zapamiętywane w komputerze sterującym i będą mogły być zmieniane przez personel. Charakterystyki temperaturowe muszą być ciągłe.
Dla linii dodaje się indeks L, zaś dla transformatora indeks T, czyli uzyskuje się odpowiednio następujące wielkości: L dI , T dI , L aI , L at , T aI , T at .
Wg danych PSE SA wartości awaryjne typowo przyjmuje się:
(a) dla linii przesyłowej L dL a %120 II = przez .min20L a =t przy założeniu, że linia
była obciążona poniżej L d%85 I ,
(b) dla transformatora T dT a %120 II = przez .min60T a =t lub wg normy
T dT a %150 II = przez .min30T a =t
Opisany algorytm decyzyjny AO został pomyślany w taki sposób by był niezależny od tego w jaki sposób wczytano dane o obciążalności. Algorytm ten ma podejmować decyzję o odciążaniu w oparciu o dane Id, Ia, ta niezależnie od tego w jaki sposób dane te wczytano. Takie podejście zapewnia elastyczność funkcjonowania AO oraz umożliwia jej rozwój. Przy takim założeniu można w przyszłości wprowadzać dane o obciążalności dynamicznej także dla linii (o ile zostaną dla nich wprowadzone systemy monitorowania obciążalności dynamicznej).

7
Algorytm decyzyjny Nr 1 (oparty na pomiarach warto ści pr ądów) Algorytm wykonywany jest jednocześnie dla każdej gałęzi monitorowanej sieci, zaś sygnał wyjściowy automatyki jest tworzony na zasadzie "jeden z wielu" tzn. sygnał wyjściowy automatyki (odciążanie lub wyłączanie zespołów wytwórczych) jest tworzony gdy powstaje co najmniej dla jednej gałęzi sieci (linii lub transformatora) monitorowanej przez automatykę. Zakłada się następujące stany działania:
a) Stan czuwania i pomiarów Blok pomiarowy odczytuje pomiary prądów pomI w poszczególnych monitorowanych
gałęziach sieci oraz temperaturę otoczenia. Blok danych (zależnie od opcji) odczytuje dane domyślne o obciążalności długotrwałej dI i awaryjnej aI , at lub wyznacza je z charakterystyk
temperaturowych (dla zmierzonej temperatury otoczenia) lub przyjmuje aktualne wartości dynamiczne z systemów monitorowania i diagnostyki.
b) Stan alertu Gdy dla którejkolwiek z gałęzi d%pom II α≥ (gdzie %100% <α ) następuje pobudzenie AO
i podanie komunikatu o wysokim obciążeniu tej gałęzi (linii lub transformatora). Następnie powrót do stanu (a).
c) Stan odci ążania regulacyjnego
Gdy apomd III ≤< odliczany jest czas zwłoki równy rucht podczas którego powinny zostać
podjęte czynności ruchowe niezbędne dla zniwelowania powstałego przeciążenia. Jeśli przeciążenie ustąpiło, powrót do stanu (a). Jeśli przeciążenie nie ustąpiło automatyka wysyła rozkazy regulacyjne na zaniżenie mocy zespołów wytwórczych wybranych do regulacji.
(c1) Jeśli przeciążenie nie ustąpiło i licząc od pobudzenia automatyki upłynął czas at
dozwolony dla takiego przeciążenia lub moc zredukowano do minimum technologicznego, automatyka powoduje wyłączanie do PPW regulowanych zespołów wytwórczych (lub innych zespołów jeśli regulowane zespoły nie przewidziano w logice automatyki do wyłączenia). Przejście do stanu (e).
(c2) Jeśli w wyniku regulacji przeciążenie ustąpiło, powrót do stanu (a) czuwania i pomiarów.
d) Stan odci ążania szybkiego Gdy apom II > automatyka podaje komunikat, że po upływie krótkiego czasu (np. 2 min.)
nastąpi wyłączanie do PPW jednego z zespołów wytwórczych. Jeśli działanie AO nie jest anulowane przez obsługę, po upływie tego czasu zostaje wysłany sygnał na wyłączenie do PPW danego zespołu wytwórczego. Następuje przejście do stanu (e) w celu oceny sytuacji.
e) Kontrola zako ńczenia odci ążania
Gdy d%pom II β< (gdzie %100% <β oraz %% αβ > ) następuje podanie komunikatu
o zakończeniu odciążania. Powrót do stanu (a). Przykładowe wartości: %85% =α ,
%98% =β .
4.2 Algorytm AO ze współczynnikami węzłowo-gałęziowymi Z punktu widzenia racjonalności postępowania dobrze by było aby algorytm decyzyjny AO mógł od razu przewidzieć, czy przy danym przeciążeniu jest sens podejmować odciążanie poprzez regulację tj. czy w zadanym czasie odciążanie w dostępnym tempie będzie wystarczające, czy od razu podjąć decyzję wyłączenia. Niżej opisany jest algorytm mający takie właściwości.

8
4.2.1 Współczynniki węzłowo-gałęziowe
Współczynniki węzłowo-gałęziowe kij)(κ występujące w równaniu (4.1) można obliczyć
korzystając z równania impedancyjnego węzłowego. Rozważa się ogólny przypadek wpływu prądu węzłowego kI dowolnego węzła k na prąd ijI w dowolnej gałęzi i-j.
Dla potrzeb opisu tego algorytmu wprowadza się dodatkowo (w stosunku do poprzedniego algorytmu) szybkość odciążania zespołu wytwórczego p oraz współczynnik odciążania. Współczynnik węzłowo-gałęziowy kij)(κ określa efektywność odciążania gałęzi sieci (linii
lub transformatora) za pomocą zmiany prądu zespołów wytwórczych. Z tego względu w dalszej części przy opisywaniu algorytmu współczynnik ten będzie nazywany "współczynnikiem odciążania". W algorytmie decyzyjnym AO współczynnik odciążania dla danej gałęzi sieci i węzła wytwórczego mógłby służyć do stwierdzenia a priori jak duża musi być redukcja wytwarzania (moc regulowanych lub wyłączanych zespołów wytwórczych), aby uzyskać wymagane odciążenie danej gałęzi sieci: κ/LG II ∆=∆ lub κ/TG II ∆=∆ , gdzie indeksy G,L,T
oznaczają odpowiednio generator, linię, transformator. W praktyce mówiąc o obciążeniu linii przesyłowych ma się na myśli prąd, zaś w przypadku zespołów wytwórczych i transformatorów odpowiednio moc. Z tego względu współczynniki odciążania dla linii i transformatorów można zdefiniować następująco:
mLL PI ∆⋅=∆ κ lub mTT PS ∆⋅=∆ κ (4.2)
gdzie mP∆ -zmiana mocy mechanicznej turbiny danego zespołu wytwórczego, LI∆ -zmiana
obciążenia linii w kA, TS∆ -zmiana obciążenia transformatora w MVA, Lκ -współczynnik
odciążania linii przesyłowej w kA/MW, Tκ -współczynnik odciążania transformatora w MVA/MW.
4.2.2 Algorytm decyzyjny
Mając oszacowanie mP∆ można sprawdzić czy zaniżenie mocy wybranych zespołów wytwórczych do minimum technologicznego będzie wystarczające dla odciążenia sieci. Jeśli nie będzie, należy podjąć decyzję o wyłączeniu wybranego zespołu wytwórczego i nie podejmowaniu działań regulacyjnych. Można także sprawdzić, czy przy danej szybkości regulacji p czas regulacji pPt /mr ∆= wymagany do zredukowania mocy turbin
o oszacowaną wartość mP∆ jest mniejszy od czasu przewidzianego w algorytmie na regulację.
Algorytm decyzyjny nr 2 (wykorzystuj ący współczynniki w ęzłowo-gał ęziowe)
Zakłada się następujące stany działania:
a) Stan czuwania i pomiarów (a1) Blok pomiarowy odczytuje pomiary prądów pomI w poszczególnych monitorowanych
gałęziach sieci oraz temperaturę otoczenia. Blok danych (zależnie od opcji) odczytuje dane domyślne o obciążalności długotrwałej dI i awaryjnej aI , at lub wyznacza je
z charakterystyk temperaturowych (dla zmierzonej temperatury otoczenia) lub przyjmuje aktualne wartości dynamiczne z systemów monitorowania i diagnostyki.
(a2) Blok danych sprawdza konfigurację sieci wyprowadzenia mocy z elektrowni. Jeśli stan jest normalny (N-0), odczytuje z pamięci wartości współczynników odciążania κ dla stanu normalnego. Jeśli nastąpiło wyłączenie gałęzi sieci (linii lub transformatora) wyprowadzenia mocy z elektrowni współczynniki odciążania są modyfikowane.

9
b) Stan alertu Gdy dla którejkolwiek z gałęzi d%pom II α≥ (gdzie %100% <α ) następuje pobudzenie AO
i podanie komunikatu o wysokim obciążeniu tej gałęzi (linii lub transformatora). Następnie powrót do stanu (a).
c) Stan odci ążania regulacyjnego
Gdy apomd III ≤< w oparciu o współczynniki odciążania obliczana jest szacunkowa wartość
wymaganej mocy odciążania mP∆ oraz wymagany czas regulacji pPt /mr ∆= . Sprawdzane są następujące kryteria dalszego działania:
(c1) Gdy dostępna moc regulacyjna jest za mała lub wymagany czas regulacji jest za długi automatyka nie podejmuje odciążania regulacyjnego i podaje komunikat, że nie będzie wykonywana regulacja i ostrzega, że po upływie czasu at nastąpi automatyczne
wyłączenie do PPW zespołu wytwórczego wybranego z listy zespołów zadeklarowanych do wyłączeń. W takim przypadku cały czas at może być wykorzystany na czynności
ruchowe. Jeśli przeciążenie ustępuje, powrót do stanu (a). Jeśli przeciążenie nie ustępuje podawany jest sygnał na wyłączenie zespołu wytwórczego do PPW. Powrót do stanu (a).
(c2) Gdy dostępna moc regulacyjna jest wystarczająca i wymagany czas regulacji nie jest za długi automatyka podaje komunikat, że po upływie krótkiego czasu (np. 2 min.) podjęte zostanie odciążanie regulacyjne. Gdy taka decyzja AO nie jest ręcznie anulowana przez obsługę, po upływie zadanego czasu automatyka wysyła rozkazy regulacyjne na zaniżenie mocy zespołów wytwórczych wybranych do regulacji. Jeśli przeciążenie ustępuje, powrót do stanu (a). Jeśli wyczerpano zakres regulacyjny następuje przejście do stanu (e) w celu oceny sytuacji i podjęcia dalszych decyzji.
d) Stan odci ążania szybkiego Gdy apom II > automatyka podaje komunikat, że po upływie krótkiego czasu (np. 2 min.)
nastąpi wyłączanie do PPW jednego z zespołów wytwórczych. Jeśli działanie AO nie jest anulowane przez obsługę, po upływie tego czasu zostaje wysłany sygnał na wyłączenie do PPW danego zespołu wytwórczego. Następuje przejście do stanu (e) w celu oceny sytuacji.
e) Kontrola zako ńczenia odci ążania
Gdy d%pom II β< (gdzie %100% <β oraz %% αβ > ) następuje podanie komunikatu o
zakończeniu odciążania. Powrót do stanu (a). Przykładowe wartości: %85% =α , %98% =β
W celu oszacowania wpływu wyłączeń gałęzi sieci w pracy [6] w ramach analiz wykonanych dla jednego z węzłów wytwórczych KSE zbadano zakresy zmian wartości współczynników węzłowo-gałęziowych przy wyłączeniach pojedynczych oraz wielokrotnych. Do analizy przyjęto węzeł wytwórczy przedstawiony na Rys. 4.1. Ze względu na poufność danych KSE oznaczenia gałęzi na rysunku są fikcyjne.
Rys. 4.1. Uproszczony schemat węzła wytwórczego AAA

10
Uzyskane wartości współczynników odciążania zestawiono w Tab. 4.1.
Tab. 4.1. Przykłady wartości współczynników odciążania
Kod (N-0) (N-1) (N-2)
Min Max Min Max
L42 0,479 0,506 0,620 0,663 0,873
L01 0,059 0,082 0,116 0,127 0,232
L41 0,231 0,246 0,428 0,325 0,768
AAA-A2 0,231 0,231 0,456 0,337 0,790
Powyższy sposób obliczenia współczynników odciążania tj. w A/A nie zaburza analizy, a pozwala na lepszą obserwację zjawisk zachodzących w analizowanym węźle. Warto zwrócić uwagę, że dla stanów wyłączeń brano pod uwagę wyłączenia rozmaitych gałęzi sieci. Stąd rozrzuty w wartościach podanych w kolumnach min oraz max. Z przeprowadzonych obliczeń wynika, że w stosunku do stanu normalnego (N-0) w stanach wyłączeń wartości współczynników odciążania ulegają znaczącym zmianom i powyższy algorytm mógłby być stosowany tylko z metodą odpowiedniego modyfikowania wartości współczynników przy zmianach konfiguracji sieci.
4.3 Algorytm AO z identyfikowaniem współczynników odciążania Ponieważ proces odciążania poprzez regulację mocy wytwarzanej nie jest szybki, w algorytmie decyzyjnym AO zamiast obliczania współczynników odciążania na podstawie parametrów sieci, można zastosować identyfikowanie współczynników odciążania na podstawie rzeczywistych skutków odciążania uzyskanych w zadanym krótkim przedziale czasu regulacji (np. w ciągu jednej minuty). Korzystając z wzorów (4.2) można napisać:
)()(
rm
rLL tP
tI
∆∆∆∆=κ lub
)()(
rm
rTT tP
tS
∆∆∆∆=κ (4.3)
gdzie rt∆ -przedział czasu regulacji przeznaczony na identyfikację skutków odciążania,
)( rm tP ∆∆ - zmiana mocy mechanicznej turbiny danego zespołu wytwórczego w danym
czasie, )( rL tI ∆∆ -zmiana obciążenia linii w danym czasie w kA, )( rT tS ∆∆ -zmiana obciążenia transformatora w danym czasie w MVA.
4.3.1 Algorytm decyzyjny Mając oszacowanie współczynników odciążania można podjąć decyzję, czy dalsze odciążanie regulacyjne będzie skuteczne przy danym minimum technologicznym zespołów wytwórczych i danej szybkości regulacji.
Algorytm decyzyjny nr 3 (z identyfikowaniem współczynników odci ążania)
Zakłada się następujące stany działania:
a) Stan czuwania i pomiarów a1) Blok pomiarowy odczytuje pomiary prądów pomI w poszczególnych monitorowanych
gałęziach sieci oraz temperaturę otoczenia. Blok danych (zależnie od opcji) odczytuje dane domyślne o obciążalności długotrwałej dI i awaryjnej aI , at lub wyznacza je
z charakterystyk temperaturowych (dla zmierzonej temperatury otoczenia) lub przyjmuje aktualne wartości dynamiczne z systemów monitorowania i diagnostyki.

11
a2) Blok danych sprawdza konfigurację sieci wyprowadzenia mocy z elektrowni. Jeśli stan jest normalny (N-0), odczytuje z pamięci wartości współczynników odciążania κ dla stanu normalnego. Jeśli nastąpiło wyłączenie gałęzi sieci (linii lub transformatora) wyprowadzenia mocy z elektrowni współczynniki odciążania są modyfikowane.
b) Stan alertu Gdy dla którejkolwiek z gałęzi d%pom II α≥ (gdzie %100% <α ) następuje pobudzenie AO
i podanie komunikatu o wysokim obciążeniu tej gałęzi (linii lub transformatora). Następnie powrót do stanu (a).
c) Stan odci ążania regulacyjnego
(c1) Gdy apomd III ≤< podjęcie odciążania regulacyjnego przez krótki czas rt∆ . Obliczenie
współczynników odciążania w oparciu o uzyskane odciążenie. Obliczenie wymaganej
mocy odciążania mP∆ oraz wymaganego czasu regulacji pPt /mr ∆= . Sprawdzane są następujące kryteria dalszego działania:
(c2) Gdy dostępna moc regulacyjna jest za mała lub wymagany czas regulacji jest za długi automatyka nie podejmuje odciążania regulacyjnego i podaje komunikat, że nie będzie wykonywana regulacja i ostrzega, że po upływie czasu at nastąpi automatyczne
wyłączenie do PPW zespołu wytwórczego wybranego z listy zespołów zadeklarowanych do wyłączeń. W takim przypadku cały czas at może być wykorzystany na czynności
ruchowe. Jeśli przeciążenie ustępuje, powrót do stanu (a). Jeśli przeciążenie nie ustępuje podawany jest sygnał na wyłączenie zespołu wytwórczego do PPW. Powrót do stanu (a).
(c3) Gdy dostępna moc regulacyjna jest wystarczająca i wymagany czas regulacji nie jest za długi automatyka podaje komunikat, że po upływie krótkiego czasu (np. 2 min.) podjęte zostanie odciążanie regulacyjne. Gdy taka decyzja AO nie jest ręcznie anulowana przez obsługę, po upływie zadanego czasu automatyka wysyła rozkazy regulacyjne na zaniżenie mocy zespołów wytwórczych wybranych do regulacji. Jeśli przeciążenie ustępuje, powrót do stanu (a). Jeśli wyczerpano zakres regulacyjny następuje przejście do stanu (e) w celu oceny sytuacji i podjęcia dalszych decyzji.
d) Stan odci ążania szybkiego Gdy apom II > automatyka podaje komunikat, że po upływie krótkiego czasu (np. 2 min.)
nastąpi wyłączanie do PPW jednego z zespołów wytwórczych. Jeśli działanie AO nie jest anulowane przez obsługę, po upływie tego czasu zostaje wysłany sygnał na wyłączenie do PPW danego zespołu wytwórczego. Następuje przejście do stanu (e) w celu oceny sytuacji.
e) Kontrola zako ńczenia odci ążania
Gdy d%pom II β< (gdzie %100% <β oraz %% αβ > ) następuje podanie komunikatu o
zakończeniu odciążania. Powrót do stanu (a). Przykładowe wartości: %85% =α , %98% =β .
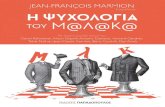
4.3.2 Weryfikacja założenia stałości współczynników odciążania W celu weryfikacji założenia o stałości współczynników odciążania przeprowadzono wszechstronne badania dotyczące węzła wytwórczego przedstawionego na Rys. 4.1. Na rysunku Rys. 4.2 przedstawiono przykładowe wyniki dla stanu (N-0) oraz wybranych stanów z wyłączeniem pojedynczym lub wielokrotnym, przy założeniu, że współczynniki odciążania były wyznaczane co )( rm tP ∆∆ = 10 MW.

12
Rys. 4.2. Zależność współczynników odciążania κL, κT od mocy odciążenia, stan (N-1) - wyłączenie linii L01
Dla ujednolicenia podejścia współczynniki odciążania obliczono w A/A (zmiana prądu w linii/transformatorze do zmiany prądu w węźle wytwórczym). Na podstawie otrzymanych wyników można sformułować następujące wnioski:
1. Wykresy współczynników odciążania κL, κT mają w przybliżeniu charakter liniowy; 2. Wartości współczynników odciążania κL, κT mają w przybliżeniu stałą wartość
(niewielkie zmiany wartości współczynników mogą wynikać z przyjętego modelu symulacyjnego systemu elektroenergetycznego oraz właściwości programu symulacyjnego – PLANS).
4.4 Przykłady wyników symulacji Badania symulacyjne, weryfikujące algorytmy odciążania przeprowadzono dla węzła wytwórczego przedstawionego na Rys. 4.1. W trakcie badań analizie poddano jedynie algorytm 2 oraz algorytm 3.
4.4.1 Słabe przeciążenia - odciążanie regulacyjne Jako jednostki regulacyjne przyjęto generatory G1 oraz G2. Przyjęto założenie, że każda jednostka wytwórcza G1 oraz G2 w trakcie czasu ta =20 min. Może zredukować wytwarzanie o ∆Pm = 160 MW, co łącznie daje 320 MW. Wyniki obliczeń symulacyjnych przedstawiono w Tab. 4.3 oraz Tab. 4.4.
Tab. 4.3. Ilustracja działania algorytmu 2 w zakresie łagodzenia słabych przeciążeń. Stan sieci, gałąź wyłączona
Wymagane odciążenie
AAA-A2 L42 L01 L41
∆Pm [MW] κT %Sd κL %Id κL %Id κL %Id (N-0) 0,231 27,7 0,479 103,2 0,059 44,9 0,231 82
70,6 24,8 100,6 43,9 79,1 (N-1), AAA-A2
0 0 0,620 109,4 0,084 48,9 0,296 88 165,3 0 101,7 45,6 79,4
(N-1), L01
0,249 37,7 0,506 108,3 0 0 0,246 89 181 32,9 101,5 0 81,1
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0,5
10 60 110
κT , κL
ΔPm
AAA-A2
L42
L41

13
Tab. 4.4. Ilustracja działania algorytmu 3 w zakresie łagodzenia słabych przeciążeń. Stan sieci, gałąź wyłączona
Wymagane odciążenie
AAA-A2 L42 L01 L41
∆Pm [MW] κTpom %Sd κLpom %Id κLpom %Id κLpom %Id (N-0) 0,201 27,7 0,404 103,2 0,057 44,9 0,318 82
83,7 24,3 100,1 43,8 78,5 (N-1), AAA-A2
197,1 0 0 0,520 109,4 0,087 48,9 0,392 88 0 100,2 45,0 77,8
(N-1), L01
216,8 0,235 37,7 0,422 108,3 0 0 0,334 89 31,4 100,2 0 79,5
Przedstawione w Tab. 4.3 oraz Tab. 4.4 przykładowe wyniki badań dotyczące likwidacji słabych przeciążeń, za pomocą regulacji mocy turbiny pokazują, że już w stanie (N-0), dla danych warunków pracy sieci elektroenergetycznej, następuje przeciążenie linii L42.W pozostałych stanach (N-1) to przeciążanie się pogłębia. Zastosowanie algorytmu 2 pozwala na dość precyzyjne określenie wymaganej wartości mocy odciążenia (lekkie niedoszacowanie mocy odciążenia). Z kolei dzięki zastosowaniu pomiarowej identyfikacji wartości współczynników odciążania (algorytm 3) możliwe jest bardzo precyzyjne wyznaczenie wartości wymaganego odciążenia regulacyjnego. Błąd odciążania na poziomie 0,2%Id jest na niskim poziomie. Większa niedokładność oszacowania wymaganego odciążania ∆Pm w przypadku algorytmu 2, może wiązać się z dokładnością obliczeń zwarciowych, a precyzyjniej modeli zwarciowych, które posłużyły do określenia węzłowo-gałęziowych współczynników odciążania.
4.4.2 Silne przeciążenia - odciążanie szybkie W przypadku silnych przeciążeń proponowane badane algorytmy podejmują decyzję o wyłączeniu jednostki wytwórczej i jej przejściu do pracy na potrzeby własne. W Tab. 4.5. przedstawiono przykładowe wyniki dotyczące silnych przeciążeń.
Tab. 4.5. Ilustracja łagodzenia silnych przeciążeń (odciążanie szybkie). Stan sieci, gałąź wyłączona
Wymagane odciążenie/ odciążenie szybkie
AAA-A2 L42 L01 L41
∆Pm [MW] κTpom %Sd κLpom %Id κLpom %Id κLpom %Id (N-1), L41
0,345 69,2 0,559 130,6 0,095 59,8 0,000 0,0 604,4/538 35,9 103,2 49,9 0,0
(N-2), AAA-A2 oraz L42
0,000 0,0 0,000 0,0 0,218 114,8 0,781 212,7
1088,7/1076 0,000 0,0 0,000 0,0 61,7 96,2
Powyższe badania zarówno dla silnych jak i słabych przeciążeń pokazuję dużą skuteczność zaproponowanych algorytmów. Ze względu na wykorzystanie współczynników węzłowo-gałęziowych wyznaczonych w sposób pomiarowy, dla rzeczywistych warunków, jako lepszy algorytm odciążania należy wskazać algorytm 3.
4.5 WADY I ZALETY ALGORYTMÓW Wady i zalety algorytmów automatyki odciążającej przedstawiono w Tab.4.2.

14
Tab. 4.2. Wady i zalety algorytmów automatyki Algorytm Zalety Wady
AO-1 oparty na pomiarach wartości prądów
Prostota algorytmu.
Czas regulacji (ta- truch ) jest krótki, gdyż czas truch przeznacza się na umożliwienie podjęcia czynności ruchowych i tylko czas (ta- truch ) przeznacza się na zaniżanie mocy.
AO-2 wykorzystujący współczynniki węzłowo-gałęziowe
W stanie c1), jeśli regulacja jest podejmowana, to na czas regulacji można przeznaczyć prawie cały czas ta. Jeśli działania regulacyjne nie są podejmowane, to na działania ruchowe operator ma również więcej czasu niż w poprzednim algorytmie, bo cały czas ta.
Konieczność wprowadzania z zewnątrz odpowiednich wartości współczynników. (współczynniki ulegają zmianom wraz ze zmianą min. konfiguracji sieci.
AO-3
z identyfikowaniem współczynników odciążania
Zalety poprzedniego algorytmu (AO-2) oraz tę istotną cechę, że decyzja o kontynuacji odciążania regulacyjnego podejmowana jest w oparciu o realne wartości współczynników odciążania
Układ nie wymaga transmisji danych o całym SEE z centralnego systemu SCADA (działa na podstawie pomiarów lokalnych)
Algorytm opiera się na założeniu, że w trakcie odciążania regulacyjnego współczynniki odciążania nie ulegają istotnym zmianom, co nie zawsze musi być słuszne.
5 Automatyka przeciwkołysaniowa Automatyka przeciwkołysaniowa (APK) jest środkiem zaradczym, który można stosować dla poprawy bezpieczeństwa SEE i zapobieżenia utracie synchronizmu w szczególnych przypadkach. W procesie planowania rozwoju SEE omawianą tu APK można stosować w okresach przejściowych, gdy rozwój sieci przesyłowej nie nadąża za rozwojem wytwarzania i stabilność dla zdarzeń wiarygodnych można zapewnić dzięki zastosowaniu dodatkowych środków takich jak APK. Utrata stabilności kątowej przejściowej systemu elektroenergetycznego polegająca na utracie synchronizmu generatorów synchronicznych może wystąpić wskutek dużego chwilowego zaburzenia bilansu mocy czynnej spowodowanego zwarciem w sieci przesyłowej bliskim elektrowni. Metody ratowania synchronizmu nazywa się metodami poprawy stabilności przejściowej. Są one szczegółowo opisane w podręcznikach [7], [4] oraz artykułach [3]. Najlepszą (naturalną) metodą poprawy stabilności przejściowej jest skracanie czasu trwania zwarcia poprzez stosowanie możliwie jak najszybszych zabezpieczeń oraz ostrożne prowadzenie pracy SEE przez zaniżanie mocy wytwarzanej w stanach wyłączeń remontowych, gdy z analiz stabilności wynika, że istnieje zagrożenie synchronizmu. Inne metody ratowania synchronizmu polegają na:
(1) zastosowaniu szybkiej regulacji turbin parowych FV (ang. fast valving), (2) załączaniu rezystorów hamujących BR (ang. braking resistors), (3) zastosowaniu szeregowych urządzeń FACTS (ang. flexible AC transmission systems), (4) wykorzystaniu szybkiej zmiany konfiguracji sieci wyprowadzenia mocy z elektrowni, (5) zastosowaniu wyłączania części generatorów pracujących na wspólne szyny.

15
Układ testowy Do analizy przyjęto węzeł wytwórczy przedstawiony na Rys. 5.1. Ze względu na poufność danych KSE oznaczenia gałęzi na rysunku są fikcyjne.
Rys.5.1. Schemat stacji BBB 400kV
5.1 ZDARZENIA ZAB-DOD
Zdarzenie Zab-dod należy rozumieć jako zwarcie 3-fazowe K3 szyn stacji likwidowane z czasem opóźnionym przez działanie dodatkowej (wydłużonej) strefy zabezpieczenia odległościowego (przypadek odstawienia zabezpieczeń podstawowych szyn stacji) tdod=300 ms, ts=200 ms, tAT=tTB=350 ms, tII=500 ms
Rys. 5.2. Schemat przedstawiający zdarzenie Zab-dod.
W pierwszym etapie przyjęto, że w sytuacji czasowego odstawienia zabezpieczeń podstawowych szyn stacji sąsiednich do stacji wyprowadzenia mocy z badanych elektrowni KSE może pracować przy założeniu, że ewentualne zwarcia tych szyn będą eliminowane przez rezerwę zdalną przekaźnikową z czasem 500 ms typowym dla II stref zabezpieczeń odległościowych. Przy tak długich czasach występowały przypadki w których dopuszczenie tak długich czasów trwania zwarcia prowadziło do utraty synchronizmu wszystkich generatorów danej elektrowni bez możliwości uratowania synchronizmu części generatorów za pomocą APK wyłączającej część generatorów tracących synchronizm. Przy omawianym czasie 500 ms poważne zagrożenie pracy KSE wynika także z faktu, że w przypadku zwarć szyn stacji istotnych dla sporej części KSE utrata synchronizmu następuje równocześnie w kilku elektrowniach, co jest już bardzo groźną sytuacją prowadzącą do awarii o charakterze systemowym. Na Rys. 5.3. pokazano przykładowo przebiegi kątów wirników i mocy generatorów trzech bliskich siebie elektrowni w przypadku opóźnionej likwidacji zwarcia szyn stacji połączonej z tymi elektrowniami. Postanowiono zbadać możliwość zastosowania dodatkowych stref działających z czasem 300 ms uaktywnianych w przypadku czasowego odstawienia podstawowych zabezpieczeń szyn stacji.

Analiza wykonana dla omawianego tu zdarzenia typu Zab300 ms znacząco zmalała liczba przypadków zagroistotnych dla wyprowadzenia mocy z du
(a)
(b)
Rys. 5.3. Przebiegi kątów wirników (a) oraz mocy czynnej generatorów (b) dla zwarcia K3 szyn stacji AAA421 likwidowanego przez działanie rezerwy zdalnej z czasem drugich stref zabezpiecze
Z wykonanej analizy wynika, zabezpieczeniu podstawowym szyn mimo zapewnienia rezerwy zdalnej działaj300 ms. Dla takich stacji należlikwidację zwarcia z czasem normalnym
(a)
(b)
Rys. 5.4. Przebiegi kątów wirników (a) oraz mocy czynnej generatorów (b) dla zwarcia K3 szyn stacji AAA421 likwidowanego przez działanie zabezpiecze
δ[o]
Pg[MW]
δ[o]
Pg[MW]
16
Analiza wykonana dla omawianego tu zdarzenia typu Zab-dod pokazała, co zmalała liczba przypadków zagrożenia synchronizmu lecz dla stacji
istotnych dla wyprowadzenia mocy z dużych elektrowni sytuacja nadal jest niedopuszczalna.
tów wirników (a) oraz mocy czynnej generatorów (b) dla zwarcia K3 szyn 21 likwidowanego przez działanie rezerwy zdalnej z czasem drugich stref zabezpiecze
odległościowych tII=500 ms.
wykonanej analizy wynika, że niektóre stacje nie mogą pracować przy odstawionym zabezpieczeniu podstawowym szyn mimo zapewnienia rezerwy zdalnej działaj
ms. Dla takich stacji należy zdublować zabezpieczenia podstawowe szyn zapewniajczasem normalnym ≤100 ms.
tów wirników (a) oraz mocy czynnej generatorów (b) dla zwarcia K3 21 likwidowanego przez działanie zabezpieczeń z czasem
t[s]
t[s]
t[s]
t[s]
dod pokazała, że przy czasach enia synchronizmu lecz dla stacji
ych elektrowni sytuacja nadal jest niedopuszczalna.
tów wirników (a) oraz mocy czynnej generatorów (b) dla zwarcia K3 szyn
21 likwidowanego przez działanie rezerwy zdalnej z czasem drugich stref zabezpieczeń
ć przy odstawionym zabezpieczeniu podstawowym szyn mimo zapewnienia rezerwy zdalnej działającej z czasem
zabezpieczenia podstawowe szyn zapewniające
tów wirników (a) oraz mocy czynnej generatorów (b) dla zwarcia K3 z czasem tII=120 ms.
[s]
[s]

17
Na Rys. 5.4. pokazano przebiegi kątów wirników i mocy czynnych generatorów tych samych elektrowni i dla tego samego miejsca zwarcia jak na Rys. 5.3. lecz przy założeniu likwidacji zwarcia z czasem 120 ms. Jak widać w tym przypadku synchronizm jest zachowany.
5.2 ZDARZENIA WYŁ -K3 Zdarzenie Wył-K3 należy rozumieć jako bliskie zwarcie 3-fazowe linii wyprowadzenia mocy z elektrowni oraz zablokowanie wyłącznika i likwidacja zwarcia przez działanie lokalnej rezerwy wyłącznikowej tLRW=300 ms oraz tLRW(3/2)=200 ms dla układu 3/2 wyłącznikowego. W układzie 3/2 wyłącznikowym należy rozpatrzyć przypadek zablokowania wyłącznika szynowego (wyłączenie linii zwartej) oraz przypadek zablokowania wyłącznika mostkowego (wyłączenie obu gałęzi danego mostka).
Rys. 5.5. Schemat przedstawiający zdarzenie Wył-K3.
Analiza wykazała, że dla czasów tLRW=300 ms występują analogiczne problemy jak dla wyżej omówionego zdarzenia Zab-dod z czasem tdod=300 ms, tzn. w wielu przypadkach dochodzi do utraty synchronizmu dużej liczby generatorów bez możliwości ratowania synchronizmu za pomocą APK. Rys. 5.6. ilustruje jeden z takich przypadków. Przy zwarciu bliskim w linii (BBB411-CCC423) i działaniu LRW z czasem tLRW=300 ms oraz czasie otwarcia wyłącznika sprzęgła poprzecznego ts=200 ms synchronizm tracą generatory pracujące zarówno na szyny 400 kV jak i szyny 220 kV.
Analiza stanów nieustalonych w trakcie zdarzeń Wył-K3 pokazała, że problemy związane z tego typu zdarzeniem mogą być w wielu przypadkach zlikwidowane, a w niektórych najtrudniejszych przypadkach złagodzone przez przyspieszenie otwarcia wyłączników sprzęgłowych szyn. W przypadku awarii wyłącznika sygnał świadczący o braku otwarcia wyłącznika jest dostępny z lokalnej rezerwy wyłącznikowej LRW typowo z czasem tLRW=300 ms dla trój-systemowego sekcjonowanego układu szyn oraz tLRW(3/2)=200 ms dla 3/2 wyłącznikowego układu szyn.

Rys. 5.6. Przebiegi mocy czynnej oraz k(BBB411-CCC423) przy czasie otwarcia wył
z czasem tLRW=300 ms (wył
Z punktu widzenia ratowania synchronizmu przy uszkodzeniach wyłjednak zbyt długie. Z tego wzglzabezpieczenia odległościowego za pomoc
sygnał BOW = Brak otwarcia wyłsygnał WZB = Wielofazowe Zwarcie Bliskie
Sygnał BOW można uzyskać w sposób nast
(a) pierwszą strefę zabezpieczenia odległodługości zabezpieczanej linii jako bezzwłocznszacowanym na 30 ms,
(b) czas otwierania wyłącznika szacuje si(c) dodatkową strefę (zależnie od znaczenia danej linii dla stabilno
się na (0,20÷0,50) długośz czasem >80 ms np. (90÷100)
Uznaje się, że wyłącznik nie otworzył sinastąpiło podanie sygnału od dodatkowej strefy tj. nie nasttej strefy. Sygnał BOW definiuje si
BOW = wielofazowe zadziałanie w I strefie
Przy wykorzystaniu tak zdefiniowanego sygnału z duzałożyć, że pojawienie się takiego sygnału jest spowodowane brakiem otwarcia wyłSygnał taki można wykorzystaćlub do wyłączenia generatorów z czasem Sygnał WZB można pozyskać z zabezpieczestrefę nastawioną na krótki zasiDziałanie tej krótkiej strefy przy zwarciach wielofazowych generuje sygnał WZB. Sygnał WZB można wykorzystać do przyspieszenia działania lokalnej rezerwy wyłw układzie stacji 3/2 wyłącznikowym. Sygnał WZB moi następnie przy braku otwarcia wył
Pg[MW]
δ[o]
18
Przebiegi mocy czynnej oraz kąta obciążenia generatorów przy zwarciu bliskim w linii CCC423) przy czasie otwarcia wyłącznika sprzęgła szyn ts=200 ms i działaniu LRW
ms (wyłączenie YBBB-G6 oraz YBBB-G7 z czasem t
Z punktu widzenia ratowania synchronizmu przy uszkodzeniach wyłączników takie czasy sjednak zbyt długie. Z tego względu w zaproponowano dwa specjalne sygnały pozyskiwane z
ciowego za pomocą dodatkowej strefy: = Brak otwarcia wyłącznika = Wielofazowe Zwarcie Bliskie
ć w sposób następujący:
zabezpieczenia odległościowego nastawia się typowo na 0,85 ci zabezpieczanej linii jako bezzwłoczną z czasem własnym zabezpieczenia
ącznika szacuje się na 50 ms, żnie od znaczenia danej linii dla stabilności KSE) nastawia
na (0,20÷0,50) długości linii z czasem wydłużonym do wartości >(ms np. (90÷100) ms. cznik nie otworzył się, jeśli po podaniu sygnału na otwarcie wył
piło podanie sygnału od dodatkowej strefy tj. nie nastąpiło przerwanie naliczania czasu iniuje się następująco:
wielofazowe zadziałanie w I strefie ∩ zadziałanie w dodatkowej krótkiej opóstrefie
Przy wykorzystaniu tak zdefiniowanego sygnału z dużym prawdopodobieę takiego sygnału jest spowodowane brakiem otwarcia wył
na wykorzystać do otwarcia wyłączników sprzęgłowych z czasem czenia generatorów z czasem tAPK=150 ms.
na pozyskać z zabezpieczeń odległościowych przeznaczają na krótki zasięg (np. na (0,20÷0,50) długości linii) działają
ej strefy przy zwarciach wielofazowych generuje sygnał WZB. Sygnał ć do przyspieszenia działania lokalnej rezerwy wyłącznikowym. Sygnał WZB można podać na cewk
twarcia wyłącznika już bez próby ponownego otwarcia wył
t[s]
t[s]
enia generatorów przy zwarciu bliskim w linii
ms i działaniu LRW tLRW=300 ms)
ączników takie czasy są du w zaproponowano dwa specjalne sygnały pozyskiwane z
typowo na 0,85 em własnym zabezpieczenia
ści KSE) nastawia ści >(30+50) tj.
li po podaniu sygnału na otwarcie wyłącznika piło przerwanie naliczania czasu
zadziałanie w dodatkowej krótkiej opó źnionej
ym prawdopodobieństwem można takiego sygnału jest spowodowane brakiem otwarcia wyłącznika.
głowych z czasem ts=150 ms
ciowych przeznaczając na ten cel jedną ci linii) działającą bezzwłocznie.
ej strefy przy zwarciach wielofazowych generuje sygnał WZB. Sygnał do przyspieszenia działania lokalnej rezerwy wyłącznikowej LRW
na cewkę wyłącznika bez próby ponownego otwarcia wyłącznika

dokonać przełączeń przypisanych do LRW. W ten sposób dla bliskich zwarczas likwidacji zwarcia bliskiego przy awarii wyłkilkadziesiąt milisekund. W przypadku zabezpieczesygnał WZB można wykorzystadostępny szybciej niż sygnały od pierwszej strefy pomiarowej algorytmu odległoPrzydatność zaproponowanych sygnałów zbadano w ramach wykonywania pracy dotyczącej zainstalowania w KSE duJako punkt wyjścia do analiz przyts=200 ms. Tak długi czas połątakże generatory przyłączone do sekcji szyn w których nie ma zwarW badaniach symulacyjnych ssprzęgłowego znacząco poprawia sytuacjRacjonalnym działaniem przy zdarzeniach typu Wył(otwarcie wyłącznika sprzęgła) bez oczekiwania na rezultat próby ponouszkodzonego wyłącznika przez LRW. Lepiej jest nawet zbędnie rozcigeneratorów.
Rys. 5.7. Przebiegi mocy czynnej oraz k(BBB411-CCC423) przy czasie otwarcia wył
z czasem tLRW=300 ms (wył
W celu przyspieszenia rozcinania szyn mootworzyć wyłącznik sprzęgłowy z efektywnym czasem do przyjętego ts=200 ms daje skrócenie czasu o 50Skuteczność szybszego otwarcia wyłwyprowadzenia mocy z dużz Rys. 5.7. Gdy wyłącznik sprzęsynchronizmu kilku generatorówz czasem ts=150 ms, to po odłtLRW=300 ms system jest stabilny (
Pg[MW]
δ[o]
19
przypisanych do LRW. W ten sposób dla bliskich zwarczas likwidacji zwarcia bliskiego przy awarii wyłącznika skróci się
W przypadku zabezpieczeń opartych na komparatorze fazy jako na wykorzystać sygnał identyfikacji zwarcia bliskiego. Sygnał ten jest
sygnały od pierwszej strefy pomiarowej algorytmu odległowanych sygnałów zbadano w ramach wykonywania pracy
cej zainstalowania w KSE dużych zespołów wytwórczych. cia do analiz przyjęto efektywny czas otwarcia wyłącznika sprz
ms. Tak długi czas połączenia sekcji szyn jest przyczyną dla której synchronizm tracczone do sekcji szyn w których nie ma zwarć
badaniach symulacyjnych stwierdzono, że każde przyspieszenie otwarcia wyłco poprawia sytuację.
Racjonalnym działaniem przy zdarzeniach typu Wył-K3 jest możliwie szybkie rozcięgła) bez oczekiwania na rezultat próby pono
cznika przez LRW. dnie rozciąć sekcje szyn niż doprowadzić do utraty synchronizmu wielu
Przebiegi mocy czynnej oraz kąta obciążenia generatorów przy zwarciu bliskim w linii CCC423) przy czasie otwarcia wyłącznika sprzęgła szyn ts=150 ms i działaniu LRW
ms (wyłączenie YBBB-G6 oraz YBBB-G7 z czasem t
przyspieszenia rozcinania szyn można wykorzystać sygnał BOW pozwalajęgłowy z efektywnym czasem ts=150 ms, co w stosunku
ms daje skrócenie czasu o 50 ms czyli o 25%. szybszego otwarcia wyłącznika sprzęgła poprzecznego szyn stacji 400
wyprowadzenia mocy z dużej elektrowni ilustruje porównanie powycznik sprzęgła szyn był otwierany z czasem ts=200 ms
synchronizmu kilku generatorów (Rys. 5.6.). Gdy wyłącznik sprzęgła zostaje otwarty szybciej ms, to po odłączeniu szyny z uszkodzonym wyłącznikiem z czasem
ms system jest stabilny (Rys. 5.7.).
t[s]
t[s]
przypisanych do LRW. W ten sposób dla bliskich zwarć wielofazowych cznika skróci się o co najmniej
opartych na komparatorze fazy jako sygnał identyfikacji zwarcia bliskiego. Sygnał ten jest
sygnały od pierwszej strefy pomiarowej algorytmu odległościowego. wanych sygnałów zbadano w ramach wykonywania pracy [6]
ącznika sprzęgła szyn dla której synchronizm tracą
czone do sekcji szyn w których nie ma zwarć ani uszkodzeń. de przyspieszenie otwarcia wyłącznika
liwie szybkie rozcięcie szyn gła) bez oczekiwania na rezultat próby ponownego otwarcia
do utraty synchronizmu wielu
enia generatorów przy zwarciu bliskim w linii ms i działaniu LRW
tLRW=300 ms)
sygnał BOW pozwalający ms, co w stosunku
gła poprzecznego szyn stacji 400 kV ej elektrowni ilustruje porównanie powyższego Rys. 5.6.
ms następowała utrata gła zostaje otwarty szybciej
ącznikiem z czasem

Z powyższych względów wykonano dodatkowe symulacje sprawdzajdziałania zabezpieczeń od poślizgu biegunów w przypadku, gdyby mimo szybkiego rozciszyn doszło do utraty synchronizmu. Wnioski z tych badaNa Rys. 5.8. pokazano przebiegi mocy czynnej przy zwarciu bliskim w linii (BBB421DDD414) w stanie (N-1) ruchowego odstawienia linii (BBB421otwarcia wyłącznika sprzęgła szyn z działaniem LRW wyłączane ssekcji szyn z uszkodzonym wyłtakże generatory YBBB-G9 oraz YBBBrysunku trzecim założono, że generatory te sbiegunów PSP. Po takim działaniu pozostałe w pracy generatory zachowuja (a) wyłączenie YBBB-G11 oraz YBBB
(b) wyłączenie YBBB-G9 oraz YBBB
Rys. 5.8. Przebiegi mocy czynnej przy zwarciu bliskim w(N-1) ruchowego odstawienia linii
sprzęgła szyn ts(wyłączenie YBBB
Pg[MW]
Pg[MW]
20
dów wykonano dodatkowe symulacje sprawdzające jaki byłby rezultat od poślizgu biegunów w przypadku, gdyby mimo szybkiego rozci
y synchronizmu. Wnioski z tych badań są optymistyczne. pokazano przebiegi mocy czynnej przy zwarciu bliskim w linii (BBB421
1) ruchowego odstawienia linii (BBB421-AAA421) przy czasie ęgła szyn ts=0,150 s i działaniu LRW z czasem tczane są generatory YBBB-G11 oraz YBBB-G12 przył
sekcji szyn z uszkodzonym wyłącznikiem. Po wyłączeniu zwarcia z synchronizmu wypadajG9 oraz YBBB-G10 przyłączone do sąsiedniej sekcji szyn. Na że generatory te są wyłączane przez zabezpieczenia od po
biegunów PSP. Po takim działaniu pozostałe w pracy generatory zachowują
G11 oraz YBBB-G12 przez LRW z czasem tLRW=0,300s
G9 oraz YBBB-G10 przez zabezpieczenia od poś
. Przebiegi mocy czynnej przy zwarciu bliskim w linii (BBB421- DDD4141) ruchowego odstawienia linii (BBB421- AAA421) przy czasie otwarcia wył
s=150 ms i działaniu LRW z czasem tLRW=300czenie YBBB-G11 oraz YBBB-G12 z czasem tLRW=300
t[s]
t[s]
t[s]
ące jaki byłby rezultat lizgu biegunów w przypadku, gdyby mimo szybkiego rozcięcia
optymistyczne. pokazano przebiegi mocy czynnej przy zwarciu bliskim w linii (BBB421-
AAA421) przy czasie tLRW=0,300 s. Wraz
G12 przyłączone do czeniu zwarcia z synchronizmu wypadają
siedniej sekcji szyn. Na czane przez zabezpieczenia od poślizgu
biegunów PSP. Po takim działaniu pozostałe w pracy generatory zachowują synchronizm.
=0,300s
G10 przez zabezpieczenia od poślizgu biegunów
DDD414) w stanie czasie otwarcia wyłącznika
=300 ms =300 ms).

21
6 Załączanie rezystorów hamujących Rezystory hamujące są to rezystory załączane w SEE krótkotrwale w celu dociążenia mocą czynną generatorów, które wskutek zwarcia uzyskują znaczące przyspieszenia mogące prowadzić do utraty synchronizmu. Rezystory hamujące można podzielić na bocznikowe i szeregowe. Rezystory bocznikowe (głównie stosowane w hydroelektrowniach) są załączane w momencie powstania zwarcia bliskiego elektrowni na ułamek sekundy na czas wybiegania wirników generatorów (dodatni poślizg). Następnie rezystory te są wyłączane. Zastosowanie oraz sterowanie rezystorów hamujących bocznikowych jest opisane w podręcznikach [7], [4].
6.1 Przykład zastosowania rezystorów szeregowych Rezystory szeregowe są mniej popularne i w literaturze jest mało informacji na temat ich praktycznych zastosowań, zwłaszcza dla dużych elektrowni. Zastosowanie szeregowych rezystorów hamujących do ratowania synchronizmu dużych generatorów elektrowni jądrowej opisano w referacie [10].
Rys. 6.1. Schemat ideowy załączenia szeregowego rezystora hamującego w polu blokowym
(a) z wyłącznikiem zwierającym, (b) z dwoma wyłącznikami
Jest kilka możliwych sposobów włączania szeregowego rezystora do obwodu zespołu wytwórczego. Dwa z nich pokazano na Rys. 6.1. Odnośnie zakresu zastosowania w artykule [10] przyjęto, że rezystor ma być wykorzystywany jako środek poprawy stabilności kątowej przejściowej dla bliskich zwarć trójfazowych w liniach przesyłowych likwidowanych z czasem opóźnionym wskutek uszkodzenia wyłącznika w polu liniowym.
6.2 Dobór rezystancji rezystora szeregowego Rezystor włączony do obwodu połączenia zespołu wytwórczego z SEE wpływa nie tylko na przebieg ruchu wirnika w trakcie i po danym zwarciu, ale także na przebieg wszystkich wielkości elektrycznych. Z tego względu dobierając rezystor hamujący powinno się uwzględnić następujące czynniki:
(a) Intensywność hamowania wirnika generatora w trakcie zwarcia (likwidowanego z czasem opóźnionym),
(b) Oddziaływanie rezystora na ruch wirnika po wyłączeniu zwarcia, (c) Wpływ rezystora na przebieg napięcia generatora w trakcie zwarcia i po jego likwidacji, (d) Momenty udarowe na wale zespołu wytwórczego w trakcie załączania i wyłączania
rezystora.

22
6.2.1 Schematy zastępcze analizowanego układu
Analityczne analizowanie kryteriów doboru rezystora hamującego oraz określenie algorytmu sterowania tego rezystora wymaga sformułowania i zbadania zależności matematycznych opisujących model układu. Trzeba przy tym rozważać zarówno stan zwarcia bliskiego szyn stacji wyprowadzenia mocy z elektrowni jak również stan po wyłączeniu zwarcia. Odpowiednie schematy oraz wykres fazorowy dla stanu po wyłączeniu zwarcia podano na Rys. 6.2. Lewa strona schematów odpowiada schematowi zastępczemu zespołu wytwórczego
przy czym )( T"dg XXX += jest reaktancją zastępczą generatora dla stanu przejściowego
i transformatora blokowego, E jest zastępczą siłą elektromotoryczną generatora dla stanu przejściowego, R jest rezystancją rezystora hamującego, sX jest reaktancją zastępczą
systemu elektroenergetycznego, sU jest napięciem zastępczym systemu
elektroenergetycznego.
Rys. 6.2. Schematy zastępcze i wykres fazorowy układu z rezystorem szeregowym
(a) stan przed zakłóceniem, (b) stan przy wystąpieniu bliskiego zwarcia trójfazowego, (c) stan po wyłączeniu zwarcia przed wyłączeniem rezystora, (d) wykres fazorowy
Przy typowych parametrach generatora i transformatora blokowego reaktancja
zastępcza zespołu wytwórczego )( T"dg XXX += jest większa od reaktancji zastępczej
systemu sX , tj. zachodzi:
sg XX ≥ (6.1)
Dla typowych stanów obciążenia generatora mocą czynną i bierną indukcyjną przejściowa siła elektromotoryczna generatora jest większa od napięcia generatora i tym samym większa od napięcia zastępczego systemu, czyli zachodzi: sUE > .
6.2.2 Stan bliskiego zwarcia trójfazowego
W stanie bliskiego zwarcia trójfazowego generator jest obciążony mocą czynną odpowiadającą stratom mocy czynnej na rezystancji R wywołanej prądem zwarcia (Rys. 6.2.),
czyli RIP 2K3K3 = , gdzie: 22
gK3 / RXEI += . Stąd otrzymuje się:

23
)(1
1g
2
2g
2
2
g
g
g
2
22g
2
K3 rfX
E
r
r
X
E
X
R
X
R
X
ER
RX
EP =
+=
+
=
+= (6.2)
gdzie:
1)(
2 +=
r
rrf oraz
gX
Rr = (6.3)
6.2.3 Stan po likwidacji zwarcia
Do dalszych rozważań przyjmuje się następujące oznaczenia:
sg XXX +=Σ ; ΣΣ += XRZ j ; 222ΣΣ += XRZ (6.4)
Zgodnie z wykresem fazorowym (Rys. 6.2d) składowe prądu i napięcia wyrażone są wzorami:
( )δδ cossin1
ss2ga UXEXRUZ
I ΣΣΣ
−+−= (6.5)
( )δδ cossin1
ss2gb RUREUXZ
I −+= ΣΣ
(6.6)
Moc czynna generatora dana jest wzorem )cos( g ϕδ += EIP , gdzie )( ϕδ + jest kątem
między fazorem siły elektromotorycznej E a fazorem prądu generatora gI (Rys. 6.2.).
Z wykresu fazorowego wynika także, że gb EIP = , czyli po uwzględnieniu (6.6) otrzymuje
się:
ΣΣΣΣΣΣ
Σ +−==Z
E
Z
R
Z
EU
Z
R
Z
EU
Z
XPP
2ss
RR cossin)( δδδ (6.7)
gdzie indeks R dodano dla podkreślenia, że powyższy wzór określa charakterystykę układu z załączonym rezystorem szeregowym. Dla stanu normalnego gdy rezystor szeregowy jest wyłączony zachodzi 0=R oraz ΣΣ = XZ i powyższy wzór (6.7) przyjmuje następującą postać.
δδ sin)( s
Σ==
X
EUPP (6.8)
Powyższe wzory (6.8) i (6.7) określają kątową charakterystykę mocy dla stanu normalnego oraz stanu załączenia rezystora przy braku zwarcia. Wpływ rezystora na kątową charakterystykę mocy jest następujący:
(a) Rezystor zmniejsza amplitudę składnika zależnego od δsin , gdyż stosunek amplitudy
tego składnika w (6.7) do amplitudy w (6.8) dany jest wzorem 22 / ΣΣ ZX , przy czym dla
0>R , zachodzi ΣΣ > XZ , czyli 1)/( 22 <ΣΣ ZX . (b) Dla kątów 2/π0 <≤ δ drugi składnik wzoru (6.7) zależny od δcos pomniejsza moc
czynną generatora oraz powiększa moc czynną generatora dla kątów π2/π << δ . (b) Trzeci składnik wzoru (6.7) nie zależy od kąta i podnosi kątową charakterystykę mocy
powiększając moc czynną generatora.

24
6.3 Algorytmy sterowania rezystorów szeregowych Sterowanie rezystora hamującego polega na jego załączeniu i wyłączeniu, przy czym istotny jest algorytm decyzyjny wybierający moment w którym następuje załączenie i wyłączenie.
6.3.1 Algorytmy proponowane
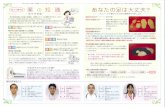
Wpływ szeregowego rezystora hamującego na stabilność można omówić za pomocą metody równych pól, co ilustruje Rys. 6.3. Oba rysunki Rys. 6.3a oraz Rys. 6.3b są dla tych samych danych lecz różnią się mocą mechaniczną mP .
Rys. 6.3. Ilustracja wpływu szeregowego rezystora hamującego na stabilność układu
generator-sieć sztywna dla: 1s =U ; 2,1=E ; 0,1g =X ; 5/gs XX = ; g8,0 XR = oraz
(a) 66,0m =P , (b) 76,0m =P
Na Rys. 6.3b przyjęto moc mechaniczną większą niż dla rysunku Rys. 6.3a. W obu przypadkach przed wystąpieniem bliskiego zwarcia trójfazowego układ pracuje w punkcie równowagi 1, tj. na przecięciu prostej mP oraz kątowej charakterystyki mocy )(δP dla stanu bez rezystora. Wskutek bliskiego zwarcia trójfazowego moc czynna maleje do zera do punktu 2. Wirnik przyspiesza i w krótkim czasie pokonuje drogę 2-3. Zakłada się, że w punkcie 3 następuje załączenie rezystora hamującego i układ przechodzi do punktu 4 tj. moc czynna zwiększa się do mocy K3P odpowiadającej wzorowi (6.2). Ponieważ zakłada się, że zwarcie
trwa nadal (opóźniony czas likwidacji zwarcia) wirnik nadal przyspiesza wykonując drogę 4-5. W punkcie 5 następuje likwidacja zwarcia i układ przechodzi do punktu 7 leżącego na

25
charakterystyce )(R δP odpowiadającej wzorowi (6.7). Dla tak dużych kątów charakterystyka ta leży znacznie wyżej od charakterystyki )(δP bez rezystora odpowiadającej wzorowi (6.8). W rezultacie dostępne pole hamowania jest duże i układ nie traci synchronizmu. Wirnik wychyla się do punktu 8 w którym pole hamowania 6,7,8,9 równoważy pole przyspieszenia 1,2,3,4,5,6. W punkcie 8 wirnik ma zerowy poślizg. Następuje tu zmiana znaku poślizgu tzn. poślizg z dodatniego (wybieganie wirnika) zmienia się na ujemny (powrót wirnika). Poniżej punkt 8 nazywany będzie punktem zmiany znaku poślizgu. W obu przypadkach pokazanych na Rys. 6.3. układ jest stabilny. Przypadki te dobrano jednak tak by pokazać dwa bardzo istotne następujące fakty:
(a) wyłączenie rezystora hamującego przed dojściem wirnika do punktu zmiany poślizgu może prowadzić do utraty synchronizmu,
(b) wyłączenie rezystora hamującego w punkcie zmiany poślizgu może prowadzić do utraty synchronizmu.
Wynika z tego, że: • Wyłączenie rezystora hamującego przed dojściem wirnika do punktu zmiany poślizgu
może prowadzić do utraty synchronizmu. • Wyłączenie rezystora hamującego w punkcie zmiany poślizgu może prowadzić
do utraty synchronizmu. • Dopóki wirnik wybiega (dodatni poślizg) tj. kąt położenia wirnika (kąt obciążenia)
zwiększa się korzystne jest utrzymywanie rezystora hamującego w stanie załączenia. • Gdy wirnik zaczyna wracać (ujemny poślizg) tj. kąt położenia wirnika maleje
utrzymywanie rezystora w stanie załączenie jest niekorzystne dla dalszego przebiegu kołysań wirnika.
Kwadrat prądu generatora można wyrazić wzorem 2gb
2ga
2g III += , gdzie gaI , gbI są
składowymi ortogonalnymi fazora prądu. Jak wynika z analizy tych wzorów oraz przebiegu
funkcji )(2g δI pokazanej na Rys 6.4., w całym przedziale dodatnich wartości kąta funkcja ta
jest monotoniczna tzn. kwadrat prądu maleje gdy kąt maleje. Śledzenie w trakcie kołysań
wirnika wartości funkcji )(2g δI i jej pochodnej pozwala zidentyfikować kierunek ruchu
wirnika tj. czy wirnik wybiega (wtedy 0d/)(d 2g >tI ) czy też znajduje się w ruchu wstecznym
(wtedy 0d/)(d 2g <tI ).
Rys. 6.4. Zależność mocy czynnych i kwadratu prądu od kąta obciążenia
Pomiar mocy czynnej i jej pochodnej w danym momencie pozwala stwierdzić po której stronie charakterystyki )(R δP znajduje się wirnik i w którym kierunku zmierza. Ilustruje to Rys 6.5. Przykładowo. Wirnik znajduje się po lewej stronie charakterystyki i wybiega, gdy obie pochodne są dodatnie (Rys 6.5a.). Wirnik znajduje się po lewej stronie charakterystyki i jest w ruchu wstecznym, gdy obie pochodne są ujemne (Rys 6.5b.)

26
Rys. 6.5. Znaki pochodnych mocy czynnej i kwadratu prądu przy: (a) wybieganiu wirnika, (b) ruchu wstecznym
Warto tu dodać, że w technice cyfrowej pomiar kwadratu prądu jest prosty np. za pomocą algorytmu Phadke-Ibrahim [9], [8]. Z przebiegu sinusoidalnego z zadaną częstotliwością próbkowania pobierane są próbki (wartości chwilowe) z których oblicza się składowe ortogonalne fazora prądu, a następnie kwadrat prądu. Analogicznie można obliczyć składowe ortogonalne napięcia. Wymnażając odpowiednio składowe ortogonalne prądu i składowe ortogonalne napięcia otrzymuje się odpowiednio moc czynną i moc bierną.
Algorytm1 . Wyłączenie rezystora wykonuje się w ruchu wstecznym w pobliżu stabilnego punktu równowagi (punkt 1 na Rys. 6.3). Korzystając z pochodnych mocy czynnej i kwadratu prądu kryterium decyzyjne tego algorytmu można wyrazić za pomocą następującego iloczynu logicznego (koniunkcja trzech warunków):
0d
)(d 2g <t
I∩ 0
dd R <
t
P ∩ P0R )( ∆<− εPP (6.9)
gdzie m0 PP = jest mocą czynną dla stanu przed wystąpieniem zakłócenia, 0P ≥∆ε jest małą
wartością pozwalającą stwierdzić, że moc jest bliska wartości w punkcie równowagi. Algorytm oparty na kryterium (6.9) zapewnia możliwość maksymalnego wykorzystania dostępnego pola hamowań uzyskanego dzięki rezystorowi hamującemu. Tym samym algorytm ten pozwala uzyskać maksymalny możliwy krytyczny czas trwania zwarcia. Algorytm ma tę wadę, że w ruchu wstecznym zbyt długo utrzymuje w pracy rezystor hamujący, co powoduje, że w ruchu wstecznym wykonywana jest duża praca hamowania (na Rys. 6.3 pole 8,7,1,9) i wsteczne zakołysanie wirnika jest duże. Oczywiście to zakołysanie i dalsze kołysania mogą być zmniejszane dzięki działaniu stabilizatora systemowego (PSS), który dla dużych zespołów wytwórczych jest obligatoryjny [1]. Algorytm2 . wyłączenie rezystora wykonuje się w ruchu wstecznym na lewo od ekstremum charakterystyki )(R δP tj. poniżej mocy maksymalnej z załączonym rezystorem (punkt 12 na Rys. 6.3b oznaczony gwiazdką). Kryterium decyzyjne tego algorytmu polega na sprawdzeniu czy spełnione są równocześnie trzy następujące kryteria pomiarowe:
0d
)(d 2g <t
I∩ dP
Rd
d ε<t
P ∩ 0)( 0R >− PP (6.10)
gdzie 0dP <ε jest małą liczbą ujemną. Algorytm ten powoduje podanie sygnału na
wyłączenie rezystora hamującego w ruchu wstecznym wirnika zaraz po przejściu przez wierzchołek charakterystyki )(R δP z załączonym rezystorem (punkt 12 na Rys. 6.3b). Dobór
liczby dPε decyduje też o tym jak daleko za wierzchołkiem charakterystyki wyłączenie to
nastąpi.

27
Algorytm oparty na kryterium (6.10) również zapewnia możliwość maksymalnego wykorzystania dostępnego pola hamowań uzyskanego dzięki rezystorowi hamującemu i pozwala uzyskać maksymalny możliwy krytyczny czas trwania zwarcia. Zakołysanie wsteczne jest mniejsze niż w przypadku algorytmu 1. Powstaje pytanie czy przy zastosowaniu algorytmu 2 istnieje realne ryzyko przełączenia układu na charakterystykę )(δP poniżej mocy mechanicznej mP , co prowadziłoby do utraty
synchronizmu. Ryzyko to zależy od tego na ile wierzchołek charakterystyki )(R δP z załączonym rezystorem (punkt 12 na Rys. 6.3b oznaczony gwiazdką) jest wysunięty na prawo poza niestabilny punkt równowagi leżący na charakterystyce )(δP dla danego
obciążenia, gdzie m0 PP = .
6.4 Przykłady wyników symulacji Badania symulacyjne działania proponowanych algorytmów sterowania wykonano dla dwóch systemów testowych: (a) układu generator - sieć sztywna oraz (b) cztero - generatorowego systemu testowego Kundura zaczerpnietego z podręcznika [2].
6.4.1 Układ generator sieć sztywna
Badany model układu generator - sieć sztywna pokazano na Rys. 6.6. składa się z generatora o mocy Sn=1127 MVA, transformatora blokowego, linii przesyłowych L1 i L2 o napięciu znamionowym 400 kV i reaktancji XL=29,2 Ω każda, źródła zastępującego system o mocy zwarciowej SK3=27022 MVA tj. reaktancji zastępczej Xs=5,9 Ω. W stanie poprzedzającym zwarcie generator obciążony jest mocą znamionową P=Pn=965 MW.
Rys. 6.6. Schemat badanego układu generator – sieć sztywna
Założono, że w linii L1 blisko szyn stacji powstaje zwarcie trójfazowe i w trakcie likwidacji zwarcia następuje uszkodzenie wyłącznika w polu liniowym. W rezultacie działania lokalnej rezerwy wyłącznikowej zwarcie jest likwidowane przez otwarcie wyłącznika sprzęgła i generator może pracować na sieć sztywną poprzez linie L2, oczywiście o ile zachowa synchronizm.
Tab. 6.1. Porównanie czasów krytycznych dla trzech wartości rezystancji rezystora hamującego
Lp. Przebieg zdarzenia dla r=R/Xg=0,268 dla r=R/Xg=0,455 dla r=R/Xg=1,0 t kr [s] tak [s] t kr [s] tak [s] t kr [s] tak [s]
1 z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie likwidacji zwarcia
0,367 0,197 2,046 1,876 0,820 0,650
2 z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie zmiany znaku poślizgu wirnika
0,433 0,513 0,823 0,653 0,600 0,219
3
z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie przekroczenia stabilnego punktu równowagi PR(t)=P0 (algorytm 1)
0,451 1,489 2,122 3,830 0,785 2,412
4
z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w ruchu wstecznym wirnika w momencie przekroczenia mocy maksymalnej (zmian znaku pochodnej PR) (algorytm 2)
0,451 1,341 2,122 3,693 0,785 2,184
tkr = krytyczny czas trwania zwarcia, tak = czas aktywacji rezystora. Bez złączania rezystora t kr = 0,281 s

28
Bez aktywacji rezystora hamującego (Tab. 6.1) czas krytyczny (0,281s) jest mniejszy od opóźnionego czasu likwidacji zwarcia (0,350 s) i układ traci synchronizm. Dla małej wartości rezystancji r=R/Xg=0,268 gdy rezystor jest wyłączany w momencie likwidacji zwarcia (pozycja 1 w Tab. 6.1) czas krytyczny (0,367 s) jest większy od opóźnionego czasu likwidacji zwarcia (0,350 s) i układ jest stabilny z zapasem stabilności:
%8,4048,0350,0
350,0367,0
zw
zwkrt ==−=−=
t
ttk
gdzie tkr, tzw są odpowiednio czasem krytycznym i czasem likwidacji zwarcia wynikającym z działania zabezpieczeń (w tym przypadku opóźniony czas likwidacji zwarcia). Zapas ten jest za mały, gdyż wg przepisów [5] dla opóźnionego czasu likwidacji zwarć wymaga się minimum 10% zapasu stabilności. Ocenę poszczególnych wyżej omówionych wariantów wyłączania rezystora wykonano za pomocą wyliczenia całki z bezwzględnej wartości odchylenia kilku wielkości od wartości w stanie ustalonym:
( ) tIt
tx d
k
∫=
=0
1 tε
gdzie ( )txε jest odchyleniem danej wartości. Do oceny przyjęto odchylenia następujących
wielkości: ( ) )(tωεω ∆=t ; ( ) 0)( δδεδ −= tt ; ( ) 0)( PtPP −=tε ;
( ) HVRTtU −= )(HVRT tε ; ( ) LVRTtU −= )(LVRT tε
czyli odpowiednio: poślizg wirnika )(tω∆ , kąt położenia wirnika )(tδ , moc czynną )(tP , napięcie U(t), gdzie HVRT oraz LVRT są ograniczeniami wartości napięcia odpowiednio od góry i od dołu. Do oceny jakości tłumienia kołysań przyjęto przypadek z czasem likwidacji zwarcia tzw=0,350 s wynikającym z uszkodzenia wyłącznika i działania lokalnej rezerwy wyłącznikowej. Zachowanie się modelu układu generator - sieć sztywna symulowano dla 5 s przebiegu stanu nieustalonego. Wyniki zestawiono w Tab. 6.2.
Tab. 6.2. Ocena tłumienia kołysań w przypadku tzw=0,35 s oraz r=R/Xg=1,0
Lp. Przebieg zdarzenia Całka
tak [s] ∆ω ∆δ ∆P HVRT LVRT
1 z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie likwidacji zwarcia
4,505 1,098 1,284 0,144 0 0,180
2 z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie zmiany znaku poślizgu wirnika
4,281 1,046 1,221 0,127 0 0,209
3
z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie przekroczenia stabilnego punktu równowagi PR(t)=P0 (algorytm 1)
3,768 0,816 1,123 0,045 0 0,440
4
z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w ruchu wstecznym wirnika w momencie przekroczenia mocy maksymalnej (zmian znaku pochodnej PR) (algorytm 2)
4,152 1,015 1,185 0,118 0 0,225
tak = czas aktywacji rezystora
6.4.2 Model testowy Kundur'a
System testowy (nazywany systemem Kundur'a) składa się w czterech generatorów i prostego układu przesyłowego. Oryginalny schemat i dane podane są w podręczniku [2].
f

29
Rys. 6.7. Schematy systemu testowego Kundur'a wersja zmodyfikowana
W opisywanym teście założono, że w jednej z równoległych linii 10-11 blisko szyn stacji powstaje zwarcie trójfazowe i w trakcie likwidacji zwarcia następuje uszkodzenie wyłącznika w polu liniowym (na rysunku oznaczono to symbolem x). W rezultacie działania lokalnej rezerwy wyłącznikowej zwarcie jest likwidowane przez otwarcie wyłącznika sprzęgła i generator może pracować na sieć sztywną poprzez drugą z linii 10-11, oczywiście o ile zachowa synchronizm. Zadaniem szeregowego rezystora hamującego jest ratowanie synchronizmu generatora mimo, że likwidacja zwarcia następuje z czasem opóźnionym odpowiadającym czasowi działania lokalnej rezerwy wyłącznikowej. Bez aktywacji rezystora hamującego (Tab. 6.3) przy rozważanym zakłóceniu czas krytyczny (0,245 s) jest mniejszy od opóźnionego czasu likwidacji zwarcia (0,350 s) i układ traci synchronizm. Załączanie rezystora o wartości r=R/Xg=0,566 daje możliwość zwiększenia tego czasu nawet o 40%, lecz jest to jeszcze za mało (0,345 s) by układ zachował synchronizm przy założonym opóźnionym czasie likwidacji zwarcia (0,350 s). Znacznie lepszą poprawę stabilności uzyskuje się w przypadku rezystora o wartości r=R/Xg=1,0. W takim przypadku przy wszystkich rozważanych rodzajach algorytmów sterowania system jest stabilny (Tab. 6.3). Najdłuższe krytyczne czasy trwania zwarcia uzyskuje się dla obu proponowanych algorytmów, przy czym w tym przypadku najlepiej zachowuje się algorytm 1 (wyłączenie rezystora w momencie przekroczenia stabilnego punktu równowagi). Warto przy tym przypomnieć, że algorytm ten cechuje się też bardzo małym skokiem mocy czynnej przy wyłączaniu rezystora.
Tab. 6.3. Porównanie czasów krytycznych dla trzech wartości rezystancji rezystora hamującego
Lp.
Przebieg zdarzenia
dla r=R/Xg=0,566
dla r=R/Xg=1,0
t kr [s] tak [s] t kr [s] tak [s]
1 z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie likwidacji zwarcia 0,332 0,162 0,363 0,193
2 z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie zmiany znaku poślizgu wirnika 0,338 0,674 0,428 0,817
3 z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie przekroczenia stabilnego punktu równowagi PR(t)=P0 (algorytm 1)
0,345 0,876 0,534 1,497
4 z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w ruchu wstecznym wirnika w momencie przekroczenia mocy maksymalnej (zmian znaku pochodnej PR) (algorytm 2)
0,336 0,619 0,523 1,049
tkr = krytyczny czas trwania zwarcia, tak = czas aktywacji rezystora. Bez złączania rezystora tkr = 0,245 s

30
Tab. 6.4. Ocena tłumienia kołysań przy doborze rezystora r=R/Xg=1,0
Lp. Przebieg zdarzenia Całka
tak [s] ∆P HVRT LVRT
1 z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie likwidacji zwarcia
0,922 0,126 0,005 0,180
2 z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie zmiany znaku poślizgu wirnika
0,830 0,075 0,010 0,731
3 z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w momencie przekroczenia stabilnego punktu równowagi PR(t)=P0 (algorytm 1)
0,789 0,076 0,019 0,909
4
z rezystorem załączanym po 170 ms od momentu powstania zwarcia i wyłączanym w ruchu wstecznym wirnika w momencie przekroczenia mocy maksymalnej (zmian znaku pochodnej PR) (algorytm 2)
0,866 0,082 0,009 0,676
tak = czas aktywacji rezystora
Do oceny jakości tłumienia kołysań przyjęto przypadek z czasem likwidacji zwarcia tzw=0,350 s wynikającym z uszkodzenia wyłącznika i działania lokalnej rezerwy wyłącznikowej. Zachowanie się modelu symulowano dla 5 s przebiegu stanu nieustalonego. Wyniki zestawiono w Tab. 6.4. Oba proponowane algorytmy dają najmniejsze wartości całek ∆P oraz HVRT. Z punktu widzenia calki LVRT w tym przypadku algorytm 2 jest lepszy od algorytmu 1.
7 Podsumowanie i wnioski Niniejsza rozprawa dotyczy zagadnień z zakresu poprawy bezpieczeństwa, a także badania i poprawy stabilności systemu elektroenergetycznego. Przeprowadzono w pracy analizę aspektów planowania rozwoju systemu elektroenergetycznego obejmującą takie zagadnienia jak: kryteria planowania systemu elektroenergetycznego, standardy akceptowanego zachowania się systemu elektroenergetycznego, dobór zdarzeń dla analiz systemu elektroenergetycznego. Określono między innymi zestaw zdarzeń uznanych za wiarygodne, które zostały wykorzystane do przeprowadzenia badań stabilności SEE. Wykonana analiza zagadnień z zakresu planowania rozwoju SEE była podstawą do zaproponowania autorskich rozwiązań w zakresie automatyki odciążającej (AO) oraz automatyki przeciwkołysaniowej (APK).W zakresie automatyki odciążającej, przedstawiono trzy algorytmy, przy czym dwa z nich wykorzystują współczynniki węzłowo-gałęziowe. Opracowane algorytmy mogą być wykorzystane do niwelowania słabych i silnych przeciążeń w liniach wyprowadzenia mocy z elektrowni. Dzięki zastosowaniu współczynników węzłowo-gałęziowych możliwe jest oszacowanie wielkości wymaganej redukcji mocy wytwarzanej, a przez to podjęcie odpowiednich działań wynikających ze zdolności regulacyjnych jednostek wytwórczych. Wykonane badania symulacyjne dla wybranego węzła wytwórczego potwierdziły skuteczność zaproponowanych algorytmów AO. W zakresie automatyki przeciwkołysaniowej, wykonano wszechstronne badania symulacyjne z wykorzystaniem modeli planistycznych Krajowego Systemu Elektroenergetycznego (KSE). Badania oraz analizy wykazały, że przy planowanym wzroście generacji w KSE i planowanym rozwoju sieci przesyłowej dla przyjętych zdarzeń (uznanych za wiarygodne typu zwarcia w liniach przesyłowych istotnych dla wyprowadzenia mocy z dużych

31
elektrowni, uszkodzenia wyłączników lub uszkodzenia zabezpieczeń) w przypadku niektórych scenariuszy rozwoju może wystąpić zagrożenie utraty synchronizmu. Dokładne wielowariantowe badanie krytycznych czasów trwania zwarć wykazały, że wyłączanie części generatorów przez APK w momencie likwidacji zwarcia nie jest skuteczną metodą ratowania synchronizmu. Dla przyjętych do badania zdarzeń, przy normalnych (krótkich) czasach likwidacji zwarć, APK nie jest potrzebna, zaś dla zdarzeń ciężkich, przy opóźnionym (długim) czasie likwidacji zwarć, APK nie jest skuteczna. Z analizy wynika, że dla KSE, w planowanych scenariuszach rozwoju (oprócz zwiększenia inwestycji w sieć przesyłową), racjonalnym środkiem zaradczym, zapewniającym bezpieczną pracę KSE jest doskonalenie działania elektroenergetycznej automatyki zabezpieczeniowej (EAZ) i inwestowanie w jej rozwój. W tym zakresie głównymi zalecanymi działaniami powinny być:
1. Możliwie jak największe skrócenie czasu likwidacji zwarć. 2. Dla linii wyprowadzenia mocy z elektrowni stosowanie SPZ z kontrolą napięcia od
strony elektrowni. 3. W przypadku bliskich zwarć trójfazowych i zidentyfikowania zablokowania
wyłącznika w polu linii zwartej w stacjach z sekcjonowanymi szynami zastosowanie przyspieszenia rozcinania szyn za pomocą dodatkowego sygnału BOW (brak otwarcia wyłącznika).
4. W przypadku bliskich zwarć trójfazowych i zidentyfikowania zablokowania wyłącznika szynowego lub mostkowego w stacjach w układzie 3/2 wyłącznikowym przyspieszanie wykonywania operacji łączeniowych LRW za pomocą dodatkowego sygnału WZB (wielofazowe zwarcie bliskie).
5. Nie dopuszczenie do pracy KSE przy odstawionym zabezpieczeniu podstawowym szyn stacji istotnych dla wyprowadzenia mocy z dużych elektrowni,
6. Dla mniej istotnych stacji przy odstawionym zabezpieczeniu podstawowym szyn, można stosować dodatkowe strefy zabezpieczeń odległościowych (rezerwa zdalna o skróconym czasie działania).
Oprócz doskonalenia działania EAZ, w zakresie poprawy stabilności kątowej przejściowej zastosować można załączanie szeregowego rezystora hamującego. W rozprawie omówiono wpływ szeregowego rezystora hamującego na kątowe charakterystyki mocy, a także zaproponowano dwa algorytmy sterowania wykorzystujące sygnały wejściowe mierzalne lokalnie. Właściwości regulacyjne proponowanych algorytmów zostały ocenione w oparciu o wielowariantowe badania symulacyjne, które potwierdziły dużą skuteczność szeregowego rezystora hamującego w zakresie poprawy stabilności kątowej przejściowej. Za wkład własny autor niniejszej rozprawy uważa:
1. Opracowanie analizy porównawczej kryteriów planowania systemu elektroenergetycznego.
2. Opracowanie algorytmu automatyki odciążającej(AO) ze współczynnikami odciążania (na impedancjach).
3. Opracowanie algorytmu AO z predykcją współczynników odciążania. 4. Symulacyjne zweryfikowanie zaproponowanych algorytmów AO. 5. Wykazanie braku skuteczności wyłączania części generatorów jako metody
ratowania synchronizmu po zdarzeniach ekstremalnych. 6. Zaproponowanie dwóch sygnałów oraz metody ich wykorzystania do
(a) przyspieszania rozcinania szyn stacji, (b) wykonania operacji lokalnej rezerwy wyłącznikowej(LRW),

32
jako alternatywy dla wyłączania części generatorów. Wykonanie analiz potwierdzających skuteczność obu metod przeciwdziałania utracie synchronizmu przy opóźnionym wyłączaniu zwarcia spowodowanym uszkodzeniem wyłącznika.
7. Opracowanie algorytmu sterowania szeregowego rezystora hamującego instalowanego w linii wyprowadzenia mocy z elektrowni.
8. Przeprowadzenie wszechstronnych badań zaproponowanego algorytmu sterowania szeregowego rezystora hamującego, które potwierdziły jego skuteczność w zakresie poprawy stabilności kątowej przejściowej.
Problematyka badania oraz poprawy stabilności systemu elektroenergetycznego jest bardzo ważnym zagadnieniem naukowo-badawczym. Celowe jest dalsze prowadzenie badań w tej dziedzinie. Autor rozprawy zamierza kontynuować badania w obszarze metod poprawy stabilności przejściowej między innymi w kierunku powiązania działania szeregowego rezystora hamującego z innymi układami automatyki zabezpieczeniowej i regulacyjnej, a także w kierunku zastosowania rezystora szeregowego o zmiennej wartości rezystancji w trakcie stanu nieustalonego. LITERATURA [1] Instrukcja Ruchu i Eksploatacji Sieci Przesyłowej. Warunki korzystania, prowadzenia
ruchu, eksploatacji i planowania rozwoju sieci Wersja 1.0 zatwierdzona decyzją Prezesa URE nr DPK-4320-1(16)/2010/LK z dnia 30. 12. 2010 r. Tekst jednolity uwzględniający zmiany wprowadzone Kartą aktualizacji nr CK/1/2011 z dnia 15. 06.2011 r. zatwierdzoną decyzją Prezesa URE nr DPK-4320-1(2)/2011/LK z dnia 28 06 2011 r. http://www.pse-operator.pl/uploads/kontener/IRiESP-Korzystanie_ver_1.0_tekst_jedn_po_KA_CK1-2011.pdf
[2] Kundur P.: Power System Stability and Control McGraw-Hill, New York, 1994 [3] Machowski J. Automatyka przeciwkołysaniowa APK przeciwdziałająca pracy asynchro-
nicznej generatorów synchronicznych. Część I. Algorytmy restytucyjne Automatyka Elektroenergetyczna Nr 4, 2005, str.29-37, Część II. Algorytmy prewencyjne Automaty-ka Elektroenergetyczna Nr 1, 2006, str.35-41
[4] Machowski J., Bialek J., Bumby J.: Power System Dynamics. Stability and Control. John Wiley & Sons, Chichester, New York, 2008
[5] Machowski J., Kacejko P., Robak S., Miller P., Wancerz M.: Analizy systemu elektroenergetycznego w średniookresowym planowaniu rozwoju, Przegląd Elektrotechniczny (Electrical Review), R. 89 NR 6/2013
[6] Machowski J., Robak S., Baczyński D., Gryszpanowicz K.: Opracowanie koncepcji i algo-rytmu automatyki przeciwkołysaniowo-odciążajacej stacji 400/220 kV Rogowiec oraz automatyki przeciwkołysaniowo-odciążajacej stacji 400/220/110 kV Kozienice Praca na zlecenie PSE Innowacje S.A.
[7] Machowski J.: Regulacja i stabilność systemu elektroenergetycznego Oficyna Wydawnicza Politechniki Warszawskiej, Warszawa 2007
[8] Rosołowski E., Cyfrowe przetwarzanie sygnałów w automatyce elektroenergetycznej, Warszawa: Akademicka Oficyna Wydawnicza EXIT, 2001.
[9] Szafran J. , Wiszniewski A.: Algorytmy pomiarowe i decyzyjne cyfrowej automatyki elektroenergetycznej, Warszawa: WNT, 1999.
[10] Wämundson M., Lindahl S., Hagman J., Johansson D., Heyman F.: Dimensioning of EHV Series Braking Resistor for Large Thermal Generators, 2013 IREP Symposium-Bulk Power System Dynamics and Control –IX (IREP), August 25–30, 2013, Rethymnon, Greece





![r , ru,.: n w r:, o s n** h#Hffi-,#-ffi 5#3#'ffischooleducation.uk.gov.in/files/LT_KUMAYUN_MANDAL.pdf · nolo\coio -rra,r m--oq, n ere s1r 3 t " u't --+"#;iiJ *+ry_Hr]reml to-To q](https://static.fdocuments.pl/doc/165x107/5ec401563ba5fd1f0c485864/r-ru-n-w-r-o-s-n-hhffi-ffi-53-nolocoio-rrar-m-oq-n-ere-s1r.jpg)







![JoW PORADNIA ZAWODOWA - rcin.org.plrcin.org.pl/Content/31277/WA004_20499_P10774_Poradnia-zawodowa-pa.pdfporrdnir zru/odoujf] prtronrtu hrd (dŁo- dzieŻr rĘkodzielniczĄ. j o w ij.](https://static.fdocuments.pl/doc/165x107/5c780f3909d3f229578c75fc/jow-poradnia-zawodowa-rcinorg-zruodoujf-prtronrtu-hrd-dlo-dziezr-rekodzielnicza.jpg)