2. PROBLEMY GŁÓWNE DIAGNOSTYKI DRGANIOWEJwimpoig.utp.edu.pl/Opracowania/Diagnostyka...
51
...dobre rzeczy, zawsze jaśnieją w mroku... 2. PROBLEMY GŁÓWNE DIAGNOSTYKI DRGANIOWEJ 2.1. GENEZA DZIEDZINY Diagnostyka w ogólności zajmuje się rozpoznawaniem stanu obiektu na podstawie objawów lub symptomów, gdzie „symptom to uszkodzeniowo zorientowana miara sygnału”. Wykorzystanie informacji zawartych w procesie drganiowym bądź sygnale falowym interesującego nas elementu jest obszarem zainteresowań diagnostyki drganiowej. Pracy obiektów mechanicznych towarzyszy przepływ energii i informacji, których nośnikiem są procesy drganiowe, nieodłącznie towarzyszące ich funkcjonowaniu i stwarzające szansę bezdemontażowej (a nawet bezkontaktowej) oceny stanu technicznego. Jednym z podstawowych zagadnień dotyczących poprawnego funkcjonowania maszyn i urządzeń jest zagadnienie wykrywania, lokalizacji i klasyfikowania uszkodzeń oraz optymalizacja procesów kontroli ich aktualnych, przeszłych lub przyszłych stanów technicznych. Celom tym służy diagnostyka techniczna, a w szczególności diagnostyka drganiowa - dynamicznie rozwijana w ciągu ostatnich lat. Diagnostyka drganiowa umożliwia więc ocenę stanu dynamicznego maszyn za pomocą generowanych przez nie procesów drganiowych, poprzez jednoznaczne skojarzenie parametrów funkcjonalnych (cech stanu) ocenianego obiektu ze zbiorem miar i ocen generowanych procesów drganiowych (parametrów diagnostycznych). Każdy przypadek zmiany stanu obiektu jest reakcją obiektu materialnego na wymuszenia spowodowane bezpośrednim lub pośrednim oddziaływaniem energetycznym. Diagnostyka jest więc badaniem reakcji obiektu na oddziaływania energetyczne wywołujące zmianę jego stanu. Ilościowa lub jakościowa zmiana samej energii może być źródłem informacji o stanie obiektu, podobnie jak zmiana w systemie wywołana przez oddziaływanie energetyczne. Pozwala to na korzystanie z energii jako nośnika informacji wtedy, kiedy jest ona immanentnie związana z istnieniem obiektu, a także wtedy, kiedy jest ona doprowadzona z zewnątrz wyłącznie po to, aby na jej podstawie określić stan systemu. Możliwości określenia stanu materiału elementu, bądź maszyny w ruchu (bez wyłączania) w ujęciu energetycznym dobrze charakteryzują ultradźwięki. Tutaj elementy płaskie i o małej grubości można wprost prześwietlać jak w metodzie rentgenowskiej, na- tomiast dla określenia wewnętrznych wad elementów grubszych stosuje się metody echa (odbicie od wady) lub cienia akustycznego (osłabienie fali przez wadę). Technologia nieniszczących badań ultradźwiękowych stosowana jest w wielu dziedzinach inżynierii, od wstępnej kontroli jakości materiału, po kontrolę eksploatacyjną elementów maszyn i urządzeń, np. kontrolę spoistości zbiorników ciśnieniowych [14,81]. Zatem, mówiąc o roli drgań w inżynierii mechanicznej trzeba wyróżnić ich trzy aspekty i wynikające stąd cele analizy dynamicznej obiektów mechanicznych. Pierwszy aspekt szkodliwego działania drgań na obiekty mechaniczne i ludzi narzuca konieczność redukcji amplitud szkodliwych. Drugi aspekt drgań użytecznych w technologii określa cel analizy dynamicznej jako optymalizację efektywności przetwarzania energii drganiowej w pracę użyteczną. Trzeci aspekt wykorzystania informacji zawartych w drganiach stwarza konieczność optymalizacji zagadnień odbioru drgań maszyn i ekstrakcji informacji użytecznych w nich zawartych (diagnostyka drganiowa).
Transcript of 2. PROBLEMY GŁÓWNE DIAGNOSTYKI DRGANIOWEJwimpoig.utp.edu.pl/Opracowania/Diagnostyka...
...dobre rzeczy,
zawsze jaśnieją w mroku...
2. PROBLEMY GŁÓWNE DIAGNOSTYKI DRGANIOWEJ
2.1. GENEZA DZIEDZINY
Diagnostyka w ogólności zajmuje się rozpoznawaniem stanu obiektu na podstawie
objawów lub symptomów, gdzie „symptom to uszkodzeniowo zorientowana miara sygnału”.
Wykorzystanie informacji zawartych w procesie drganiowym bądź sygnale falowym
interesującego nas elementu jest obszarem zainteresowań diagnostyki drganiowej.
Pracy obiektów mechanicznych towarzyszy przepływ energii i informacji, których
nośnikiem są procesy drganiowe, nieodłącznie towarzyszące ich funkcjonowaniu i
stwarzające szansę bezdemontażowej (a nawet bezkontaktowej) oceny stanu technicznego.
Jednym z podstawowych zagadnień dotyczących poprawnego funkcjonowania maszyn
i urządzeń jest zagadnienie wykrywania, lokalizacji i klasyfikowania uszkodzeń oraz
optymalizacja procesów kontroli ich aktualnych, przeszłych lub przyszłych stanów
technicznych. Celom tym służy diagnostyka techniczna, a w szczególności diagnostyka
drganiowa - dynamicznie rozwijana w ciągu ostatnich lat.
Diagnostyka drganiowa umożliwia więc ocenę stanu dynamicznego maszyn za
pomocą generowanych przez nie procesów drganiowych, poprzez jednoznaczne skojarzenie
parametrów funkcjonalnych (cech stanu) ocenianego obiektu ze zbiorem miar i ocen
generowanych procesów drganiowych (parametrów diagnostycznych).
Każdy przypadek zmiany stanu obiektu jest reakcją obiektu materialnego na
wymuszenia spowodowane bezpośrednim lub pośrednim oddziaływaniem energetycznym.
Diagnostyka jest więc badaniem reakcji obiektu na oddziaływania energetyczne wywołujące
zmianę jego stanu. Ilościowa lub jakościowa zmiana samej energii może być źródłem
informacji o stanie obiektu, podobnie jak zmiana w systemie wywołana przez oddziaływanie
energetyczne. Pozwala to na korzystanie z energii jako nośnika informacji wtedy, kiedy jest
ona immanentnie związana z istnieniem obiektu, a także wtedy, kiedy jest ona doprowadzona
z zewnątrz wyłącznie po to, aby na jej podstawie określić stan systemu.
Możliwości określenia stanu materiału elementu, bądź maszyny w ruchu (bez
wyłączania) w ujęciu energetycznym dobrze charakteryzują ultradźwięki. Tutaj elementy
płaskie i o małej grubości można wprost prześwietlać jak w metodzie rentgenowskiej, na-
tomiast dla określenia wewnętrznych wad elementów grubszych stosuje się metody echa
(odbicie od wady) lub cienia akustycznego (osłabienie fali przez wadę). Technologia
nieniszczących badań ultradźwiękowych stosowana jest w wielu dziedzinach inżynierii, od
wstępnej kontroli jakości materiału, po kontrolę eksploatacyjną elementów maszyn i
urządzeń, np. kontrolę spoistości zbiorników ciśnieniowych [14,81].
Zatem, mówiąc o roli drgań w inżynierii mechanicznej trzeba wyróżnić ich trzy
aspekty i wynikające stąd cele analizy dynamicznej obiektów mechanicznych. Pierwszy
aspekt szkodliwego działania drgań na obiekty mechaniczne i ludzi narzuca konieczność
redukcji amplitud szkodliwych. Drugi aspekt drgań użytecznych w technologii określa cel
analizy dynamicznej jako optymalizację efektywności przetwarzania energii drganiowej w
pracę użyteczną. Trzeci aspekt wykorzystania informacji zawartych w drganiach stwarza
konieczność optymalizacji zagadnień odbioru drgań maszyn i ekstrakcji informacji
użytecznych w nich zawartych (diagnostyka drganiowa).

Nie wdając się bliżej w różne techniki badawcze przejdźmy do diagnostyki
drganiowej, gdzie źródłem informacji są drgania o częstotliwości od kilku herców do kilku
kiloherców. W chwili obecnej powstała już cała dziedzina zwana diagnostyką wibroakusty-
czną z oczywistymi jej zastosowaniami w diagnostyce eksploatacyjnej maszyn [4,33,34].
Obserwacja drgań eksploatacyjnych wielu maszyn, że poziom drgań mierzonych na
korpusie, obsadzie łożyska itp. zmienia się ogólnie w ujęciu modelowym w sposób
przedstawiony na rys.2.1.
Obserwując więc stan maszyny za pomocą pomiarów procesu drganiowego (zależnie
od typu maszyny i elementu mierzymy przyspieszenie a, prędkość v, przemieszczenie x),
można przewidzieć czas wystąpienia ewentualnej awarii i zapobiec jej przez wykonanie
właściwej naprawy. Co więcej, obserwując skład widmowy drgań w porównaniu z
częstotliwością obrotową fo i znajomością kinematyki maszyny potrafimy określić element,
który należy poddać odnowie. Przykładowo składowe widmowe o częstotliwościach
podanych niżej są symptomami: f – niewyważenia, 2f - luzy, 2f - 3f – nieosiowość, nfo -
częstotliwość zębowa koła o liczbie zębów n i obrotach fo. Śledząc więc amplitudy
poszczególnych składowych widmowych będących symptomami drganiowymi elementów
możemy oceniać ich stan eksploatacyjny.
Rys.2.1. Krzywa życia maszyny obserwowana za pomocą pomiarów drganiowych
Patrząc syntetycznie na ogół możliwych zastosowań diagnostyki drganiowej w kolejnych
fazach istnienia obiektu, trzeba wyróżnić potrzebę znajomości wiedzy o obiekcie, o
sygnałach, syndromach i symptomach oraz elementy teorii decyzji w zakresie wnioskowania
diagnostycznego, niezbędnych do prawidłowej oceny stanu technicznego obiektu [1,8,20,25].
Wibroakustyka – jest dziedziną wiedzy zajmującą się wszelkimi procesami
drganiowymi, akustycznymi i pulsacyjnymi zachodzącymi w przyrodzie, technice, maszynach
[1,24,25,32]. Procesy wibroakustyczne to nie tylko procesy szkodliwe czy też pasożytnicze.
Odpowiednio zastosowane mogą stać się nośnikiem energii, która może zostać wykorzystana
do realizacji różnorodnych procesów technologicznych. Do głównych zadań wibroakustyki
zaliczyć można:
identyfikację źródeł energii wibroakustycznej - która polega na zlokalizowaniu
poszczególnych źródeł w obrębie obiektu, maszyny czy środowiska, określenie
charakterystyk i współzależności pomiędzy poszczególnymi źródłami, określenie mocy
wibroakustycznej, a także charakteru generacji drgań i dźwięków,
opracowanie dróg propagacji energii wibroakustycznej w rzeczywistych
konstrukcjach i środowisku (budowlach, maszynach, obiektach itp.), opracowanie teorii
przenoszenia i transformacji energii, opracowanie biernych i czynnych kontroli zjawisk,
opracowanie metod badań na pograniczu falowego i dyskretnego ujęcia zjawisk,

opracowanie metod kontroli energii wibroakustycznej (emisji, propagacji, imisji) w
maszynach i środowisku, a także opracowanie metod sterowania tymi zjawiskami co
łączy się z rozwijanymi w cały świecie metodami aktywnymi,
wykorzystanie sygnałów wibroakustycznych dla celów diagnostyki technicznej,
gdyż są one dobrym nośnikiem informacji o stanie obiektu o raz realizowanym procesie
technologicznym (diagnostyka wibroakustyczna),
synteza wibroakustyczna maszyn i obiektów, prowadzona dla uzyskania optymalnej
aktywności wibroakustycznej. Obejmująca:
syntezę parametrów opisujących pola akustyczne, względnie syntezę wielkości
wibroakustycznych stosowanych w aktywnych metodach redukcji drgań i hałasu oraz
syntezę dźwięków w akustyce mowy;
syntezę maszyn i obiektów, przez co rozumie się syntezę strukturalną, kinematyczną i
dynamiczną prowadzącą do uzyskania optymalnej aktywności wibroakustycznej;
czynne zastosowania energii wibroakustycznej - począwszy od spawania
ultradźwiękowego, czyszczenia ultradźwiękowego, poprzez transport materiałów i
elementów maszyn na liniach technologicznych, do zagęszczania mas formierskich,
wybijania i czyszczenia odlewów aż do zagęszczania gruntów i betonów.
Celem utylitarnym wibroakustyki jest obniżenie poziomu zakłóceń drganiowych i
akustycznych maszyn i urządzeń oraz ich otoczenia do minimum, możliwego na danym etapie
wiedzy i poziomie technologii. Procesy wibroakustyczne towarzyszące funkcjonowaniu
maszyny, z punktu widzenia zastosowań diagnostycznych są dobrymi nośnikami informacji o
stanie technicznym danego obiektu [1,24,24,30]. Zastosowanie procesów wibroakustycznych
do diagnozowania urządzeń mechanicznych wynika z następujących powodów:
procesy wibroakustyczne są odzwierciedleniem najistotniejszych zjawisk fizycznych
zachodzących w maszynach, od których zależy ich poprawne funkcjonowanie, co
wynika z charakteru rozprzestrzeniania się procesu drganiowego generowanego w
parach kinematycznych,
łatwość pomiaru procesów wibroakustycznych w warunkach rzeczywistych pracy
obiektu bez konieczności wyłączania go z ruchu oraz specjalnego przygotowania,
umożliwia bezdemontażową ocenę stanu;
procesy wibroakustyczne cechują się dużą prędkością przekazywania informacji w
jednostce czasu,
procesy wibroakustyczne cechują się złożoną strukturą czasową, amplitudową i
częstotliwościową, co zapewnia im dużą informacyjność ora umożliwia ocenę stanu
całego urządzenia, jak również pojedynczych jego elementów i zespołów.
W zastosowaniu diagnostycznym, niezależnie od formy, w jakiej został wprowadzony
sygnał wibroakustyczny do systemu diagnostycznego, musi zostać przetworzony do postaci
zbiorów parametrów, których wartości są podstawą opisu cech stanów obiektów
diagnostycznych. Wybór tych parametrów zasadniczo wpływa na efektywność procesów
diagnozy. Opisując ewolucyjny proces zużycia oraz uszkodzeń elementów obiektu
mechanicznego należy zbudować jego holistyczny model energetyczny, opisujący jego
zachowanie w funkcji czasu , będącego czasem ewolucji dynamicznej, tj. w całym cyklu
życia obiektu.
Czynnikiem determinującym oddziaływania energetyczne i ich efektywność w systemie
mechanicznym jest charakterystyka drganiowa złożonego układu mechanicznego, na ogół
wielorezonansowego, często nieliniowego i o zmiennych parametrach w skali czasu życia
systemu lub czasu własnego procesu technologicznego. Zatem, minimalizacja oddziaływań
energetycznych źródeł musi prowadzić przez identyfikację charakterystyk dynamicznych i
utworzenie dostatecznie dokładnego, ale jednocześnie możliwie prostego, modelu
energetycznego do wiarygodnej symulacji i minimalizacji obciążeń dynamicznych poprzez
np. zmianę parametrów mechanicznych lub parametrów procesu technologicznego.
Rzeczywistości techniczna to wynik analizy modeli, które ją mniej lub bardziej
poprawnie opisują. Proces, którego celem jest zbudowanie najlepszego modelu operacyjnego
(matematycznego lub empirycznego) nazywany jest procesem identyfikacji, a w skład jego
wchodzą zagadnienia: modelowania, eksperymentu, estymacji i weryfikacji modelu.
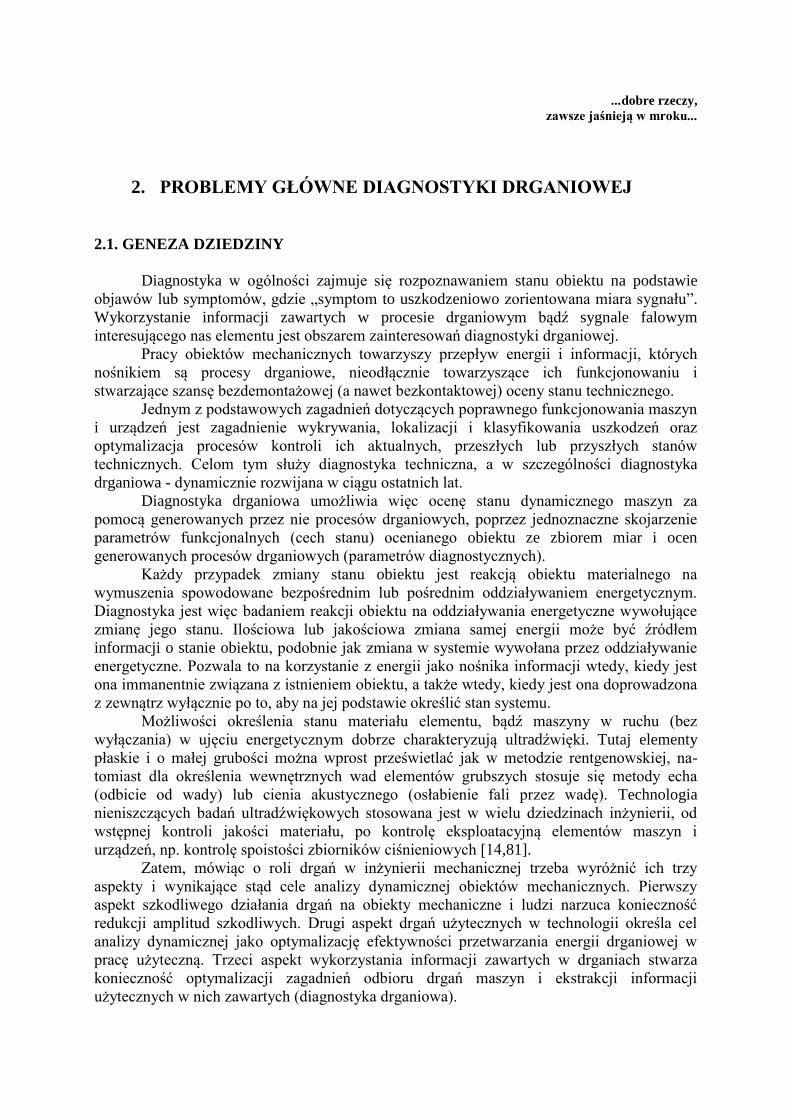
Podstawowe badania modelowania zmian stanu obiektu oparte są na analizie sygnałów
wejściowych i wyjściowych, wykorzystując do tego założenia modelu cybernetycznego
obiektu – rys.2.2. Obejmują one badanie liniowości układu, badanie dyskretności układu oraz
badanie liczby stopni swobody. W literaturze opisano wiele różnych metod o różnym stopniu
skomplikowania, a poniżej podano opisy najprostszych z nich możliwych do realizacji prawie
w każdych warunkach laboratoryjnych.
Rys.2.2. Model cybernetyczny obiektu
Badanie liniowości układu - zasada superpozycji (rys.2.3):
"Jeżeli odpowiedzią układu liniowego na zaburzenie u1(t)jest sygnał x1(t) oraz odpowiedzią
na zaburzenie u2(t) jest sygnał x2(t), to odpowiedzią tego układu na zaburzenie będące sumą
u1(t)+ u2(t) jest sygnał x1(t)+ x2(t)".
Rys.2.3. Badanie liniowości układu
u1(t) = A1sin t x1(t)
u2(t) = A2 sin t x2(t)
u1(t) + u2(t) = (A1 + A2) sin t u3(t) = x1(t) + x2(t)
dla układu liniowego
Badanie dyskretności układu - wszystkie układy mechaniczne są układami o parametrach
rozłożonych (ciągłość parametrów masowo-sprężystych), ale w wielu przypadkach można z
dobrym przybliżeniem traktować je jako układy dyskretne.
Założenie o dyskretności układu powinno być doświadczalnie weryfikowane - czy badany
element układu można traktować jako bryłę sztywną. Jednakowe wartości liczbowe
parametrów ruchu w trzech punktach odbioru traktowane jako wynik wymuszenia
harmonicznego z generatora sygnałów stanowią kryterium sztywności układu – rys.2.4.
Rys.2.4. Badanie dyskretności (sztywności) układu
Należy pamiętać: "natura układów mechanicznych pozwala zazwyczaj dla niższych
częstości ruchu przyjmować modele dyskretne, natomiast dla wyższych - modele o ciągłym
rozłożeniu parametrów".
Określenie liczby stopni swobody - dla modelu dyskretnego.
Badanie liczby rezonansów w układzie dla przyjętego zakresu częstotliwości - jest
równa liczbie stopni swobody. Należy więc z charakterystyki amplitudowo -
F(t) FRF
..
x H(f)
Obiekt
G 1 2 badanie parametrów ruchu
3
A sin t

częstotliwościowej (rys.2.5) określić liczbę maksimów (rezonansów). Dla układów
nieliniowych mogą wystąpić maksima dodatkowe.
Rys.2.5. Określenie liczby stopni swobody
Badanie liniowości, dyskretności i liczby stopni swobody modelowanych układów, to
podstawowe i proste metody wstępnych charakterystyk modelowanych obiektów badań.
Szansa oceny drganiowej stanu technicznego maszyn podczas konstruowania,
wytwarzania lub eksploatacji, często bez potrzeby wyłączania ich z ruchu - a nawet w sposób
bezkontaktowy, umożliwia udzielenie odpowiedzi na podstawowe pytania:
- jaka jest maszyna (element, zespół) podczas konstruowania?
- jaka jest maszyna po jej wytworzeniu?
- jaka jest maszyna w czasie użytkowania i / lub obsługiwania?
- jak przebiega proces technologiczny realizowany przez maszynę?
Odpowiedzi na te pytania uzyskać można z opracowanych procedur diagnostycznych,
zawierających szczegółowe algorytmy badania, dających odpowiedzi na pytania:
- co mierzyć? (jaki proces, dlaczego ten, w którym miejscu);
- jak mierzyć? (sposób akwizycji sygnału, parametry procesu, jakie cechy stanu, jak często);
- czym mierzyć? (oprzyrządowanie, przygotowanie sygnału, sposób przetwarzania);
- jak wnioskować? (modele, stany graniczne, decyzje).
Określane metodami diagnostyki drganiowej w procesie diagnozowania decyzje
diagnostyczne o stanie maszyny są wyróżniane za pomocą różnego rodzaju wskaźników
(cech, symptomów). Zawsze jednak ich forma prezentacji powinna być dostosowana do
możliwości percepcyjnych, decyzyjnych i wykonawczych użytkowników diagnozowanego
obiektu. Stąd dużą rolę przypisuje się w tym zakresie nowoczesnym technologiom
informatycznym.
2.2. STAN DYNAMICZNY MASZYNY
Istnieje potrzeba doskonalenia charakterystyk dynamicznych konstruowanych maszyn,
szczególnie w przypadku maszyn realizujących procesy technologiczne, którym towarzyszą
duże obciążenia dynamiczne. Wprowadzane są bowiem do budowy maszyn nowe technologie
oraz nowe rozwiązania konstrukcyjne, umożliwiające zwiększenie wydajności procesów, lecz
towarzyszą im często duże obciążenia dynamiczne. Czynnikiem determinującym
oddziaływania energetyczne są charakterystyki dynamiczne (zwykle wielorezonansowe)
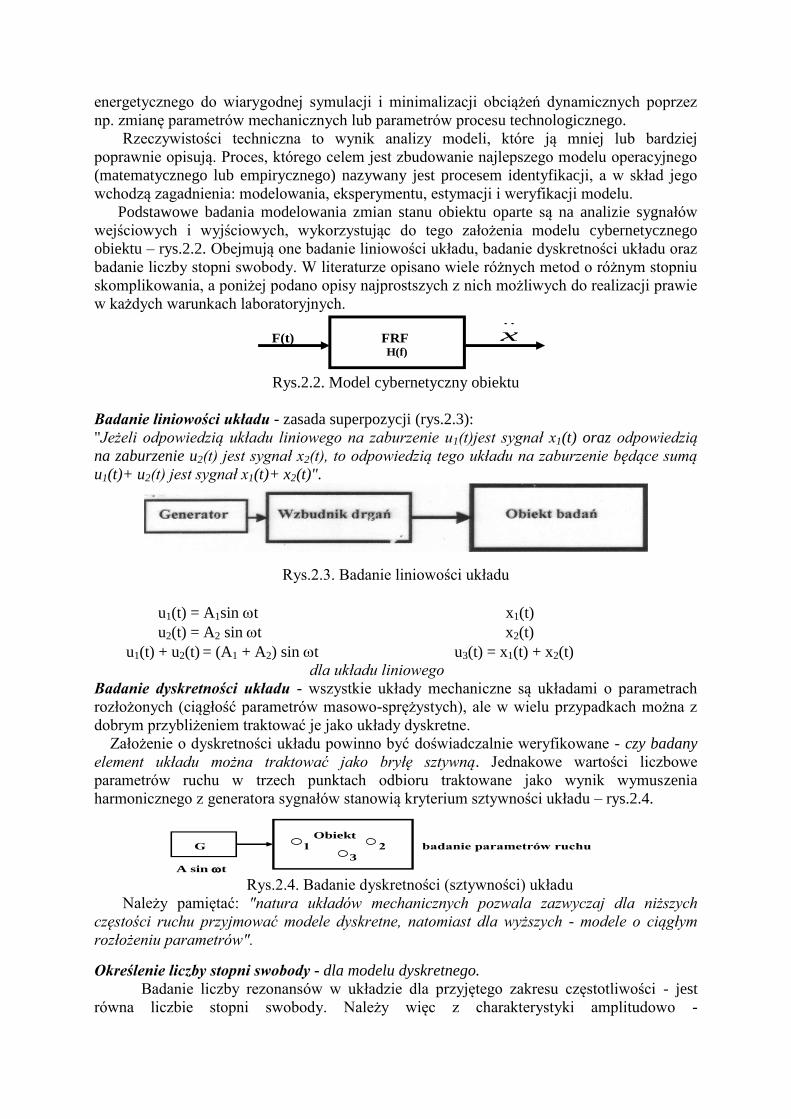
maszyny oraz wektor wymuszeń. Analiza dynamiki układu składa się z następujących etapów [5,6,14,17]:
- etap I - dokładne określenie układu, jego istotnych cech i budowa modelu fizycznego, którego
własności dynamiczne będą w dostatecznym stopniu zgodne z własnościami rzeczywistego obiektu;
- etap II – analityczny opis zjawisk dynamicznych odzwierciedlanych modelem fizycznym,
czyli model matematyczny (układ równań różniczkowych opisujących model fizyczny);
- etap III - przestudiowanie własności dynamicznych na podstawie rozwiązania równań
różniczkowych ruchu, ustalenie przewidywanego ruchu układu;
- etap IV - podjęcie decyzji projektowych, tj. przyjęcie fizycznych parametrów układu z
modernizacją przystosowaną do oczekiwań; synteza i optymalizacja prowadząca do osiągnięcia
wymaganych własności dynamicznych konstrukcji.
A
G Obiekt
A sin t widmo f
Przedstawiona procedura opiera się na znajomości modelu układu, a wnioski płynące z działań
na modelach zależą od ich jakości. Budową modeli zajmuje się identyfikacja, która utożsamia systemy
rzeczywiste z ich modelami.
Na rys.2.6 przedstawiono etapy studium dynamiki układu z zaznaczeniem sprzężeń
zwrotnych dotyczących poprawiania modelu fizycznego oraz porównania projektu z
wykonaną konstrukcją. Przy opracowywaniu zadań studium dynamiki konstrukcji szeroko
wykorzystywane są schematy blokowe. Mają one na celu przedstawienie kolejności zdarzeń
lub wzajemne ich powiązania, ułatwiają pokazanie skomplikowanych układów za pomocą
schematu blokowego zależności i związków między częściami tych układów. Złożone układy
mogą więc być studiowane oddzielnie, by w końcu złożyć to w całość. Dla każdego bloku
można podać model matematyczny opisujący własności dynamiczne, a schemat lokowy
wskaże drogę zespolenia bloków i odpowiadających im modeli, umożliwiając analizę
własności dynamicznych całego układu.
Rys.2.6. Etapy studium dynamiki układu
Funkcjonowanie maszyn i urządzeń mechanicznych nieodłącznie jest związane z
przekazywaniem różnorakich oddziaływań siłowych. Oddziaływania te można podzielić na
statyczne (stałe w czasie, zapewniające projektowane położenia lub projektowany ruch) i
dynamiczne (na ogół o charakterze oscylacyjnym). Analizując zachowanie się obiektów
mechanicznych pod wpływem części statycznej (stan naprężeniowy, położenie równowagi,
średni ruch na torze) przyjmuje się, że jest ono znane i nie stanowi problemu. Problemem jest
zatem zrozumienie i przewidywanie zachowania się obiektu pod wpływem części
dynamicznej oddziaływań, czyli analiza dynamiczna obiektu.
Kluczem do określenia dynamiki czyli drgań obiektu mechanicznego jest znajomość
możliwych odpowiedzi układu dynamicznego, do którego można zredukować badany obiekt.
Uzyskanie modelu fizycznego obiektu jest pierwszym krokiem jego analizy
dynamicznej. W wielu przypadkach otrzymany układ dynamiczny będzie układem
elementarnym, podstawowym, zwanym układem lub modelem o jednym stopniu swobody.
Procedura dojścia od obiektu rzeczywistego do jego zastępczego układu dynamicznego,
zwanego często modelem lub modelowaniem jest pierwszym krokiem analizy dynamicznej.
Wagę tego kroku dla całej analizy dynamicznej niech uzmysłowi fakt, że dla jednego obiektu
mechanicznego można obmyślić nieskończenie wiele modeli, od bardzo prostych do
niezwykle skomplikowanych, a do tego żaden może nie oddawać dostatecznie precyzyjnie
poszukiwanych własności obiektu. Tak więc procedurę modelowania, czyli dojścia do modelu
zastępczego obiektu mechanicznego należy przeanalizować na przykładzie i wyciągnąć
ogólne wnioski metodyczne.
Własności mechaniczne, które będą nas interesować przy modelowaniu to: masa
(inercja), sztywność i dyssypacja energii maszyny, urządzenia. Własności te, jak łatwo
spostrzec, rozłożone są w sposób ciągły na rozpiętości obiektu. Dążąc jednak do możliwej
prostoty opisu modelu i dalszej jego analizy własności te będziemy skupiać w określonych
punktach obiektu zwanych punktami redukcji.
Poprawki modelu fizycznego
UKŁAD Etap I Etap II Etap III WYJŚCIOWY MODELOWANIE PRZYJĘCIE STUDIUM
rzeczywisty FIZYCZNE RÓWNAŃ RUCHU WŁAŚCIWOŚCI RUCH
DYNAMICZNYCH UKŁADU
Warunki techniczne Etap IV DECYZJE
KONSTRUKCYJNE

Pierwszym krokiem modelowania jest określenie punktu redukcji własności
mechanicznych obiektu. Punkt ten musi spełniać trzy istotne warunki:
1° drgania muszą mieć amplitudy zauważalne, nie może to być więc punkt podpory
nieruchomej,
2° musi być spełniona względna łatwość redukcji rozciągłych własności inercyjnych,
sztywności i dyssypacji obiektu do własności dyskretnych,
3° musi istnieć bezpośredni związek między amplitudą drgań w punkcie redukcji a celem
analizy dynamicznej.
Następnym krokiem analizy dynamicznej obiektu jest zastosowanie praw mechaniki i
fizyki do uzyskania równań różniczkowych ruchu. Analiza rozwiązań tych równań w funkcji
parametrów modelu daje znajomość własności dynamicznych modelu. Wnioski płynące z
analizy zachowania się modelu winny dalej być skonfrontowane z wynikami eksperymentu na
obiekcie. W przypadku istotnych różnic zmieniamy model tak dalece, by otrzymać zgodne
zachowanie się obiektu i jego modelu. Wymaga to dodatkowo pełnej wiedzy i umiejętności
prowadzenia eksperymentu.
Suma założeń daje: model dyskretny liniowy, o kilku stopniach swobody, stacjonarny,
zdeterminowany. Podczas analizy stanu dynamicznego maszyn można poszukiwać
odpowiedzi w zakresie:
- oceny stateczności układu;
- wartości amplitud drgań lub występujących sił;
- opisu stanu ustalonego lub procesów przejściowych;
- określenia częstości rezonansowych.
W zależności od celu prowadzonej analizy dynamicznej obiektu stawia się różne
wymagania budowanym modelom, a ich ocenę przeprowadza się różnymi metodami
eksperymentalnymi.
Do badań dynamiki obiektów stosuje się następujące metody:
Metoda elementów skończonych (MES)
Cechą charakterystyczną MES jest modelowanie i obliczanie własności dynamicznych
obiektu oraz możliwość szybkiego wprowadzania zmian w konstrukcji obudowy i oceny ich
wpływu na drgania.
Metoda sztywnych elementów skończonych (MSES)
Metoda ta w porównaniu z MES jest metodą uproszczoną, ale znacznie szybszą i
mniej pracochłonną. Może ona być stosowana przy użyciu małych komputerów, dając
konstruktorowi pewien pogląd na zachodzące zależności. Główną jej zaletą jest łatwość
interpretacji i obliczeń.
Odtworzenie drgań z wykorzystaniem interferometrii laserowej (VPI)
Metoda ta umożliwia szybkie seryjne sprawdzanie dynamiki maszyn, poprzez
uzyskanie kolorowego - trójwymiarowego obrazu drgań obudowy. Wykonanie pomiaru
możliwe jest dzięki wykorzystaniu zjawiska interferencji fal, przy czym jako źródło
promieniowania stosuje się laser. Promień laserowy sprawdza bezstykowo stan
przemieszczeń drgań powierzchni obudowy.
Holografia akustyczna
Holografia akustyczna zajmuje się sporządzaniem i wykorzystaniem zapisu informacji
o amplitudzie i fazie promieniowania spójnego odbitego od danego obiektu. Stosując dwie
wiązki promieniowania i wykorzystując zjawisko interferencji uzyskuje się stan
przemieszczeń powierzchni obudowy utrwalony na hologramie.
Analiza modalna
Celem analizy modalnej jest pobudzenie struktury obiektu do drgań i pomiar
odpowiedzi (przyspieszenia drgań) w jednym lub wielu punktach obudowy, służący ustaleniu
struktury modelu oraz wyznaczeniu jego parametrów. Parametry modelu modalnego to:
częstości własne, tłumienie oraz wektory własne (zwane postaciami drgań) określane podczas
identyfikacji w eksperymencie. Cechą charakterystyczną analizy modalnej jest animacja
postaci drgań obudowy, umożliwiająca optymalizację dynamiki przekładni.
OPIS STANU MASZYNY
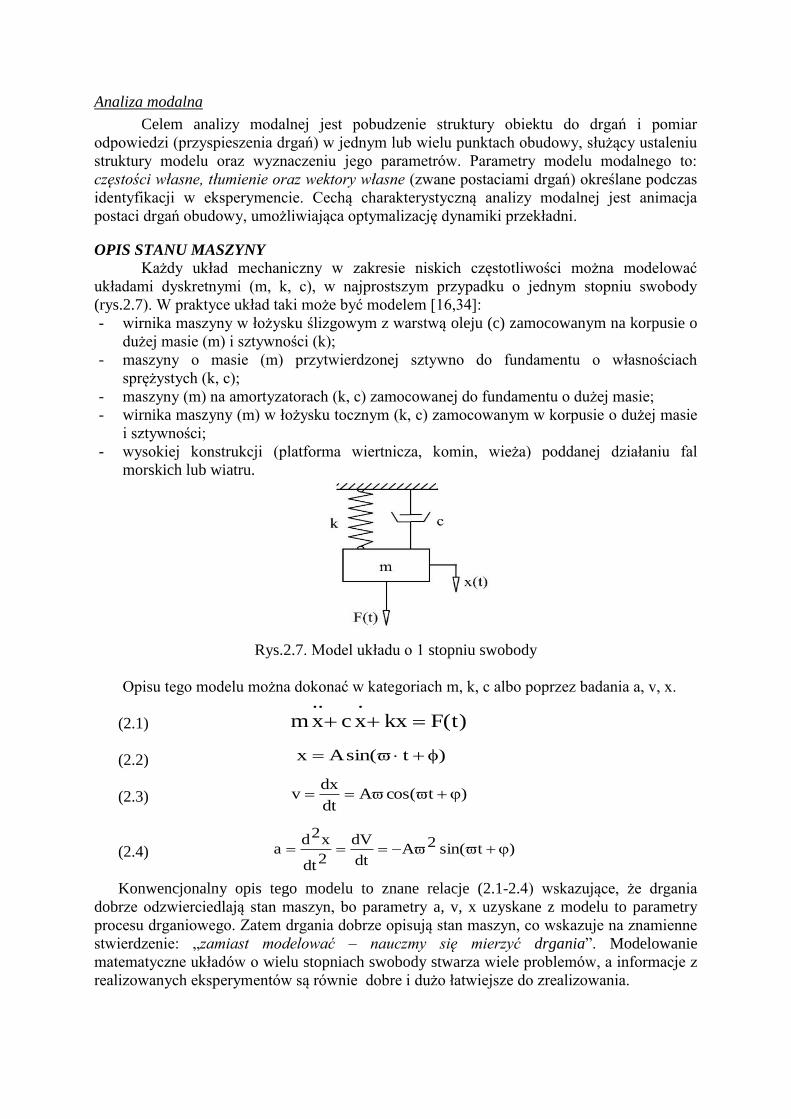
Każdy układ mechaniczny w zakresie niskich częstotliwości można modelować
układami dyskretnymi (m, k, c), w najprostszym przypadku o jednym stopniu swobody
(rys.2.7). W praktyce układ taki może być modelem [16,34]:
- wirnika maszyny w łożysku ślizgowym z warstwą oleju (c) zamocowanym na korpusie o
dużej masie (m) i sztywności (k);
- maszyny o masie (m) przytwierdzonej sztywno do fundamentu o własnościach
sprężystych (k, c);
- maszyny (m) na amortyzatorach (k, c) zamocowanej do fundamentu o dużej masie;
- wirnika maszyny (m) w łożysku tocznym (k, c) zamocowanym w korpusie o dużej masie
i sztywności;
- wysokiej konstrukcji (platforma wiertnicza, komin, wieża) poddanej działaniu fal
morskich lub wiatru.
Rys.2.7. Model układu o 1 stopniu swobody
Opisu tego modelu można dokonać w kategoriach m, k, c albo poprzez badania a, v, x.
(2.1)
(2.2)
(2.3)
(2.4)
Konwencjonalny opis tego modelu to znane relacje (2.1-2.4) wskazujące, że drgania
dobrze odzwierciedlają stan maszyn, bo parametry a, v, x uzyskane z modelu to parametry
procesu drganiowego. Zatem drgania dobrze opisują stan maszyn, co wskazuje na znamienne
stwierdzenie: „zamiast modelować – nauczmy się mierzyć drgania”. Modelowanie
matematyczne układów o wielu stopniach swobody stwarza wiele problemów, a informacje z
realizowanych eksperymentów są równie dobre i dużo łatwiejsze do zrealizowania.
)t(Fkx.xc
..xm
)tsin(Ax
)tcos(Adt
dxv
)tsin(2Adt
dV
2dt
x2da

Identyfikacja tego modelu (2.1) ze strony eksperymentalnej to pomiary a, v, x dla różnych
chwil czasowych, co odzwierciedla zmiany stanu obiektu i jest szeroko stosowane w
diagnostyce drganiowej wielu zakładów przemysłowych. Natomiast rozwiązanie zadania w
kategoriach m, k, c wymaga szeregu przekształceń rozwiązań równania (2.1) dla określenia:
m2ckr mfckr 4
(2.5) 2mk 22mf4k
Określenie wartości (2.5) wymaga zrealizowania eksperymentu identyfikacyjnego, z
którego można wyznaczyć częstotliwość f albo częstość drgań ω. Tu właśnie przydatna jest
identyfikacja prosta lub analiza modalna (opisane w końcu rozdziału) dające wprost wartości
częstotliwości albo częstości drgań własnych ω z diagramu stabilizacji – rys.2.8.
Rys.2.8. Diagram stabilizacji do wyznaczania ω
Problem komplikuje się dla modeli o wielu stopniach swobody (więcej niż 3), gdzie
zawodzi metodyka zapisu macierzowego i metoda Sarrusa. Tu także problem identyfikacji
stanu obiektu można rozwiązać od strony pomiarowej (a,v,x), natomiast od strony
wyznaczania (m, k, c) trzeba rozwiązywać zagadnienie własne:
(2.6) 00
2 qMK
Równanie (2.6) przedstawia układ liniowych jednorodnych równań algebraicznych:
01
2
1212
2
12111
2
11 nnn qmkqmkqmk
02
2
2222
2
22121
2
21 nnn qmkqmkqmk
(2.7) ….. …… ……. ……. ……
02
242
2
42141
2
41 nnnnn qmkqmkqmk
Rozwiązanie dla 0q istnieje, gdy wyznacznik główny macierzy 02 MK , czyli:
0det 2 MK . Rozwiązując układ równań (2.7) wyznaczyć można wartości własne, a z
nich częstości drgań własnych niezbędnych do identyfikacji obiektu (m
k 2 ).
W przypadku występowania obciążeń dynamicznych przekraczających dopuszczalne
wartości istnieje potrzeba budowy modelu systemu, którego analiza pozwala wskazać trafnie
środki i sposoby obniżania nadmiernych obciążeń [67,68,71]. Zastosowanie nowych metod
badania podatności dynamicznej pozwala rozdzielić złożony układ na prostsze elementy,
umożliwiając przeprowadzenie analizy wpływu zmian podatności poszczególnych elementów
na ogólną charakterystykę drganiową układu złożonego i odpowiedni dobór (elementów)
parametrów układu podczas jego kształtowania. Minimalizacja oddziaływań energetycznych

wymaga tworzenia możliwie prostych modeli do symulacji obciążeń dynamicznych,
umożliwiających minimalizację obciążeń poprzez zmianę parametrów mechanicznych
maszyny lub zmianę parametrów procesu technologicznego.
Stan dynamiczny maszyny opisują związki, jakie zachodzą między rodzajem
wymuszenia, własnościami dynamicznymi układu mechanicznego, a amplitudą drgań, czyli
ogólnie odpowiedzią układu na wymuszenie (rys.2.9).
wymuszenie BADANY amplituda drgań
UKŁAD
p(t) MECHANICZNY w(t)
dopwtw )( ; ?min)( tw
Rys.2.9. Modelowy opis stanu dynamicznego maszyny [14]
Założenia umożliwiające zastosowanie prostego aparatu matematycznego do opisu stanu
dynamicznego maszyn są następujące:
1. wymuszenie działające na układ jest zdeterminowaną funkcją czasu i przestrzeni lub też
jest czasowo-przestrzennym stacjonarnym ergodycznym procesem losowym;
2. układ mechaniczny jest przyczynowym, liniowym, stacjonarnym i statecznym układem
dynamicznym.
Kierując się przytoczonymi wyżej założeniami można znaleźć relacje między
wymuszeniem a odpowiedzią układu, traktując go jako układ dynamiczny o dyskretnym lub
ciągłym rozkładzie mas, dyssypacji i sztywności (m,c,k).
Bazując na mocy przyjętych założeń, zwłaszcza liniowości i stacjonarności układu,
można obecnie szeroko korzystać z zasady superpozycji, gdyż odpowiedź układu (skutek) jest
sumą odpowiedzi na wymuszenia składowe (przyczyny). Warto tu przypomnieć, że dowolną
funkcję okresową można rozwinąć w szereg Fouriera:
,22
,)()( 000 f
TeTtxtx
tjn
nn
,1,)(1
0
2/
2/
jdtetxT
tjnT
Tn
(2.8)
Zaś dla funkcji nieokresowych, wydłużając ich okres T do nieskończoności (T), można
otrzymać ich przedstawienie całkowe:
,)(2
1)(
deXtx tj
(2.9)
gdzie: ,)()( dtetxX tj
jest transformatą Fouriera lub obrazem fourierowskim funkcji
x(t). Dla funkcji okresowych jak w (2.81) ich transformata przyjmuje szczególną postać ciągu
dystrybucji:
,2)()( 0 nXTtxtxn
n
T
20 (2.10)
Z powyższego wynika, że każde wymuszenie oraz odpowiedź można przedstawić jako
sumę drgań harmonicznych składowych. Stąd wniosek, że wymuszenie harmoniczne typu
sint, cost, ejt
, (sint = Im[ejt
]) posiada szczególne znaczenie w dynamice liniowych
układów mechanicznych. Dalszy ważny wniosek to, że wymuszenie harmoniczne daje
odpowiedź harmoniczną, to następstwo poprzednich.
Działanie sił na dowolny układ mechaniczny (rys.2.9) w dziedzinie czasu i częstości,
dla pk(t) = 0 można opisać zależnością:

Wi() = ii() Pi(),Wk() = ki() Pi(), (2.11)
gdzie: ii(), ki() są dla danego = 0 współczynnikami proporcjonalności między
wymuszeniem i odpowiedzią.
Jeśli wymuszenie ma charakter siły [p(t)] = N, zaś odpowiedź jest przemieszczeniem
drgań [w(t)] = m, to ki(0) przedstawia zespoloną amplitudę przemieszczenia w punkcie k.
Załóżmy, że ,0Recos 0
tj
iii eAtAtp skąd Pi()=2Ai(-o). Obliczając
transformatę odwrotną (2.11) według (2.9) otrzymuje się:
Wk() = 2Aiki()( - o)
Wk(t) =
2
12Aiki()( - o)e
jwt dt = Aiki(0) .0tjw
e (2.12)
Wprowadzając amplitudę zespoloną odpowiedzi wk(t) według relacji:
wk(t) = 000 cos)(Re
k
tj
k WeW o t (2.13)
można napisać:
,)( 00 kiik AW stąd
.0
0
i
k
kiA
W (2.14)
W podobny sposób można wykazać, że:
.
00
iA
iW
ii
(2.15)
Zatem podatność jest stosunkiem amplitudy przemieszczeń przy drganiach harmonicznych do
odpowiedniej amplitudy siły wymuszającej, przy czym jednostka tej wielkości ma postać
.N
mki Tak zdefiniowana podatność dynamiczna ma prostą interpretację mechaniczną
typu przyczynowo - skutkowego, a ponadto jest funkcją dogodną do operacji w dziedzinie
przedstawień Fouriera. Postępując zgodnie z zasadą superpozycji można napisać rozszerzone
relacje (2.11):
Wi() = ii()Pi() + ik()Pk(),
Wk() = ki()Pi() + kk()Pk(), (2.16)
przy czym ki() = ik(), zgodnie z zasadą o wzajemności przemieszczeń.
Dalsza korzyść z opisu własności układów mechanicznych za pomocą podatności
dynamicznej to łatwość syntezy i znajdowania właściwości układów złożonych z elementów
prostych o znanych podatnościach.
METODYKA BUDOWY MODELU DYNAMICZNEGO
Idea metodyki budowy modelu dynamicznego systemu mechanicznego oparta jest na
danych z eksperymentu modalnego i danych z pomiaru wielkości drganiowych (przyspieszeń
drgań, momentu obrotowego, sił itp.) w warunkach eksploatacyjnych. Modele analizy
obciążeń budowane są ze względu na zastosowanie ich w procedurach optymalizacji
dynamicznej i diagnostyki eksploatacyjnej. Podstawą budowanych modeli dynamicznych jest
ich przydatność do realizacji badań metodami analizy modalnej, omówionej w punkcie 2.7.
Algorytm systemu identyfikacji modelu struktury systemu mechanicznego
zamieszczono na rys.2.10.

Rys.2.10. Schemat procedury identyfikacji modelu systemu dla potrzeb analizy stanu obciążeń [47]
Opracowanie modelu analitycznego systemu mechanicznego sprowadza się do
przyjęcia szeregu założeń upraszczających, ułatwiających opis matematyczny i analizę
procesów dynamicznych w obiekcie. Często korzystniejsze jest identyfikowanie

analitycznego modelu uproszczonego przy świadomości założeń upraszczających i dokładna
analiza modelu, niż identyfikacja modelu złożonego i jego analiza metodami przybliżonymi.
W modelowaniu takim stosowane są zwykle przybliżenia techniczne, które nie
obniżają istotnie cech układu rzeczywistego [48]. Główne z nich to: stacjonarność modelu
(niezależność własności dynamicznych modelu od czasu t), liniowość modelu, zastąpienie
modelu ciągłego modelem dyskretnym, pomijanie oddziaływań zewnętrznych o względnie
niskiej amplitudzie, mało istotnych ze względu na cel opisu modelu.
Do modelowania analitycznego obciążeń dynamicznych systemu mechanicznego buduje
się układ zastępczy, możliwie odpowiadający rzeczywistemu modelowi fizycznemu systemu.
Przyjęcie metody wielokryterialnej redukcji modelu prowadzi do jego uproszczenia:
- traktując maszynę jak hierarchiczny układ transformacji energii [51,53,54], dokonuje się
redukcji modelu stosując kryterium malejącego prawdopodobieństwa uszkodzeń i w
konsekwencji brak potrzeby diagnozowania;
- liniowość lub quasi-liniowość obiektu oraz zastosowanie odpowiedniego rodzaju
wymuszenia przy teście wyznaczającym charakterystyki dynamiczne ,jH ik obiektu
pozwala przyjąć założenie liniowości modelu;
- redukcja modelu ciągłego do modelu dyskretnego metodami analizy modalnej z
uwzględnieniem składowych charakterystyk dynamicznych ,jH ik o najwyższych
amplitudach. Oznacza to zastąpienie ciągłego modelu maszyny rozprzężonym zbiorem
układów o jednym stopniu swobody;
- ograniczenie pasma częstotliwości opisu modelu do zakresu częstotliwości składowych
charakterystyk eksploatacyjnych odpowiedzi o wysokich amplitudach;
- w opisie tych układów wystarczające jest przyjęcie modelu modalnego w postaci układu
dyskretnego o niewielkiej ilości stopni swobody (redukcja modelu). O ocenie zachowania
dynamicznego złożonych układów mechanicznych w warunkach eksploatacyjnych rozstrzyga
zwykle kilka, lub kilkanaście składowych widma dynamicznych wielkości mechanicznych
(sił, drgań, ciśnień, hałasu itp). Oznacza to, iż parametry masowo-sprężyste oraz tłumiące
tylko niektórych elementów maszyny rozstrzygają o dużym zwielokrotnieniu amplitud
sygnałów przyjętych do oceny stanu. Parametry te są zależne od stopnia degradacji
eksploatacyjnej {D()}, stąd potrzeba lokalizacji uszkodzeń i korygowanie własności;
- możliwość składania sił pozwala zredukować ilość punktów przyłożenia sił zewnętrznych
do punktów, w których umiejscowione przyłożenia wypadkowych sił wymuszających.
Realizacja badań dynamiki obiektów dla potrzeb analizy stanu obciążeń prowadzi do
przyjęcia następujących założeń [48,49]:
- wektory stanu systemu są funkcją deterministyczną zmiennej przestrzennej. Założenie to
warunkuje metoda wyznaczania macierzy charakterystyk dynamicznych { ,jH ik }
struktury, w której punkty (i,k) maszyny są dowolne, ale ustalane na początku procedury
budowy dyskretnego modelu maszyny. Założenie to nie powinno wpływać na wyniki badań;
- quasi-liniowość zachowania obiektu oraz zastosowanie odpowiedniego rodzaju wymuszenia
przy teście wyznaczającym charakterystyki dynamiczne ,jH ik obiektu pozwala przyjąć
założenia o liniowości modelu;
- rodzaje wymuszeń: przypadkowe, impulsowe;
- budując model energetyczny danej konstrukcji przyjmuje się a priori wektor wymuszeń
zewnętrznych F(,), tzn. ilość elementów wektora oraz punkty przyłożenia wypadkowych
poszczególnych sił i kierunki ich działania.
Ze względu na to, iż zachowania dynamiczne maszyny są funkcją wektora wymuszeń,
F(,), w deklarowanym modelu stanu dynamicznego (modelu modalnym) nie można
pominąć żadnego z jego elementów.

Własności dynamiczne konstrukcji mają zatem bezpośredni wpływ na poziom drgań,
emitowany hałas, wytrzymałość zmęczeniową, sterowalność i stabilność konstrukcji. Analizę
własności dynamicznych konstrukcji przeprowadza się na podstawie budowanych modeli
dynamicznych z jednej strony oraz na podstawie modeli strukturalnych w diagnostyce
holistycznej lub na podstawie eksperymentów na rzeczywistym obiekcie w diagnostyce
symptomowej.
2.3. ŹRÓDŁA PROCESÓW DRGANIOWYCH
Wiele ruchów przyrody ożywionej i nieożywionej ma charakter powtarzający się,
prawie okresowy. Oznacza to, że po pewnym ustalonym odcinku czasu historia położeń
obserwowanego obiektu, a tym samym i zjawisko ruchu, powtórzy się. Takie powtarzające się
ruchy odniesione do konkretnych obiektów nazywamy drganiami. Z tego wynika, że zjawiska
drganiowe obejmują swym zasięgiem środowisko naturalne, jak i techniczne człowieka, np.
zjawiska drganiowe obiektów mechanicznych. Można powiedzieć, że drgania zachodzą w
każdym obiekcie mechanicznym, zwłaszcza wypełniającym swą funkcję celu w dynamicznie
zmieniającym się otoczeniu /obciążeniu/. Drgania te zaczynają być istotne dopiero po
przekroczeniu pewnego poziomu wyznaczonego przez amplitudę i częstotliwość przebiegu
zjawiska. Po przekroczeniu tego progu drgania mogą być szkodliwe dla obiektu i jego
otoczenia /np. następuje zmniejszenie trwałości materiału/.
Drgania - okresowe zmiany stanu układu zachodzące dokoła pewnego położenia
równowagi pod wpływem energii dostarczonej do tego układu [31].
Drgania lub ruch drgający – to powtarzające się zmiany położenia, charakteryzujące się
powtarzalnością w czasie. Ze względu na swą naturę fizyczną drgania są bardzo różnorodne:
drgania mechaniczne, akustyczne, elektromagnetyczne i inne [25].
Drgania okresowe (periodyczne) – występują wtedy, gdy wartości wielkości fizycznych
zmieniających się w procesie drgań powtarzają się w równych przedziałach czasu. Opisują je:
amplituda drgań A – jest to maksymalne wychylenie w czasie drgania,
faza drgań - określająca wartość wychylenia x w danej chwili t w czasie drgania,
okres drgań T – jest to najmniejszy przedział czasu, po którym powtarzają się wartości
wszystkich wielkości fizycznych charakteryzujących ruch drgający oraz w tym czasie
zostaje wykonane jedno pełne drganie,
częstotliwość drgań f – jest to ilość całkowitych drgań wykonanych w jednostce czasu.
Drgania swobodne (własne) - są to drgania występujące w układzie, na który nie
działają zmienne siły zewnętrzne i powstające w wyniku początkowego odchylenia tego
układu od stanu równowagi stałej.
Drgania wymuszone - są to drgania układu wywołane działaniem na układ okresowych
sił zewnętrznych.
W odniesieniu do każdej maszyny lub urządzenia jakość określają następujące
czynniki: trwałość, niezawodność, dokładność, poziom zakłóceń zewnętrznych.
Trwałość elementów mechanicznych jest to zdolność elementu do przenoszenia
zadanych obciążeń mechanicznych mierzona w jednostkach czasu bądź pochodnych /ilość
cykli obciążenia/. Obciążenie elementu, tzn. naprężenia w nim panujące, w ogólności można
podzielić na dwie składowe: naprężenie średnie robocze oraz amplitudę zmiennego
dynamicznego naprężenia.
Niezawodność z definicji to prawdopodobieństwo wypełniania przewidzianej misji w
zadanym czasie i warunkach zewnętrznych. Istotnym składnikiem tych warunków jest poziom
drgań, na które narażone jest urządzenie. Prostym przykładem tej różnicy mogą być
wszelkiego rodzaju mierniki wskazówkowe pracujące w warunkach drgań. Przy pewnych
częstotliwościach tych drgań jest prawie niemożliwe odczytanie wskazań miernika. Mimo, że

spoistość fizyczna miernika nie jest zagrożona, to niezawodność urządzenia spada wraz ze
wzrostem amplitudy drgań.
Z przytoczonych wyżej faktów wynika jasny związek między trwałością i
niezawodnością maszyn i amplitudą drgań. Stąd też w każdym wypadku należy zmniejszać
amplitudy drgań, zwłaszcza jeśli zbliżają się do wartości granicznych.
Znaczenie zagadnień dynamicznych, szczególnie drgań, związane jest w głównej
mierze z powszechnością ruchu cyklicznego /a więc zmiennego/ maszyn oraz
odkształcalnością elementów maszyn i związanych z nimi konstrukcji. Pierwsze powoduje
powszechne występowanie sił zmiennych działających na elementy maszyn i konstrukcji,
drugie zaś powstawanie drgań, a wiec dynamicznych przemieszczeń i odkształceń tych
elementów. Efekt ten może być przy tym zwielokrotniany lub zmniejszany, zależnie od
rozkładu ich masy, sztywności, tłumienia.
Drgania są przyczyną rozprzestrzeniania się na otoczenie efektów dynamicznych
występujących w czasie pracy maszyny. Praktycznie występujące przypadki drgań maszyn i
związanych z nimi konstrukcji są albo drganiami wymuszonymi, albo drganiami
samowzbudnymi. Jeśli drgania swobodne zostaną wzbudzone to zanikają wkrótce w wyniku
tłumienia. Mają one jednak doniosłe znaczenie jako charakterystyka dynamiczna układu,
mająca istotny wpływ na przebieg lub występowanie obu wymienionych typów drgań.
Drgania wymuszone dowolnego układu mechanicznego są wynikiem działania nań
siły zewnętrznej zmiennej istniejącej i mającej określoną częstość. Układ wykonuje drgania z
częstością tej siły zewnętrznej. Jeśli częstość wymuszenia pokryje się z częstością własną
układu, to występuje rezonans, stan charakteryzujący się gwałtownym wzrostem amplitudy
drgań, a więc poza przypadkami specjalnymi wielce niepożądany. Prowadzi to bowiem do
dużych przemieszczeń i odkształceń, a przez to i obciążeń dynamicznych elementów maszyn i
konstrukcji. Drgania wymuszone towarzyszą powszechnie ruchowi maszyn.
Do powstania i utrzymania się drgań samowzbudnych niezbędne jest źródło energii
nie mające jednak cech zmienności. Energia ta może np. pochodzić z energii napędowej
maszyny, czy urządzenia. Wykorzystując tę energię układ sam generuje siłę zmienną
warunkującą jego drgania w konsekwencji tegoż ruchu drgającego. Drgania samowzbudne nie
tylko wpływają na jakość maszyn i dokładność ich działania, ale mogą być również
przyczyną poważnych awarii. Maszyna, konstrukcja lub jakaś jej część, której stan
równowagi lub ruchu ustalonego jest w określonych warunkach niestateczny, może rozwinąć
silne, niedopuszczalne drgania.
Drgania samowzbudne mogą być wynikiem przepływu cieczy lub gazu. Drgania
łopatek turbin, skrzydeł samolotu (flatter) mogą być wynikiem bardzo złożonego mechanizmu
samowzbudzenia. Układy mechaniczne o ruchach sprzężonych mogą generować drgania
samowzbudne kosztem energii np. napędowej.
W przypadku wystąpienia drgań jakiejś maszyny pierwszym i naczelnym zadaniem
jest ustalenie czy te drgania są wymuszone czy samowzbudne. Ma to duże znaczenie, gdyż
środki zaradcze, które można zastosować, są całkowicie różne w każdym z tych dwóch
możliwych przypadków.
W przypadku drgań wymuszonych maszyna może zostać pobudzona do silnych,
niedopuszczalnych drgań, szczególnie w warunkach bliskich rezonansu (w praktyce
maszynowej zwykle groźnych jest tylko kilka pierwszych rezonansów); do poprawy tej
sytuacji podstawowym działaniem jest:
a) wykrycie i eliminacja lub ograniczenie wymuszenia, tj. tej siły lub sił wymuszających
(np. przez wyważenie w przypadku sił bezwładności);
b) możliwość zmiany charakterystyki układu (rozkład masy, sztywności) w celu zmiany
jego częstości własnych i oddalenia się od rezonansu; wynika stąd znaczenie analizy
drgań własnych maszyn i konstrukcji;

c) tłumienie drgań, w szczególności przez zastosowanie tłumika dynamicznego.
W przypadku drgań samowzbudnych maszyna, której stan równowagi lub ruchu
ustalonego jest w określonych warunkach niestateczny, może rozwinąć silne, niedopuszczalne
drgania. Dla poprawy tej sytuacji podstawowym działaniem może być:
a) wykrycie i jeśli to możliwe wyeliminowanie lub ograniczenie mechanizmu
samowzbudzenia; z uwagi na różnorodne możliwe przyczyny często przysparza to
znacznych trudności i wyeliminowanie mechanizmu samowzbudzenia może być
praktycznie niemożliwe;
b) poszukiwanie możliwości spełnienia kryteriów stateczności;
c) tłumienie drgań.
Drgania mogą być wymuszone nie tylko jawnym działanie siły okresowej, lecz także
ruchem środowiska, tzn. otaczających ciał, z którymi połączony jest układ. Przykładem mogą
być drgania przyrządów i urządzeń znajdujących się w sąsiedztwie pracujących maszyn,
drgania przedmiotów transportowych itp.
Wały korbowe silników i maszyn roboczych, maszyn elektrycznych, wały napędowe
śrub okrętowych poddawane są drganiom skrętnym. Skręcanie czopów korbowych i
jednoczesne zginanie powoduje przesunięcie względne czopów głównych. Z wyjątkiem
maszyn wirnikowych momenty wymuszające we wszystkich innych maszynach mają
charakter bardziej złożony, ale okresowy. Momentami wymuszającymi drgania skrętne wału
będą zredukowane na wał momenty sił napędowych i odpowiadający im moment oporu na
sprzęgle. Dla maszyn roboczych, których cykl pracy odpowiada jednemu obrotowi wału,
rezonanse będą występować tak jak dla silnika dwusuwowego. Jest więc nieograniczenie
dużo prędkości rezonansowych odpowiadających każdej częstości własnej. W przypadku
drgań giętnych dynamiczne obciążenia poprzeczne rosną z kwadratem prędkości oraz rośnie
podatność dynamiczna układu na zginanie przy zbliżaniu się zakresu prędkości wirnika do
obszaru częstości jego drgań własnych.
Stwierdzono, że zniszczenia (pęknięcia) tarcz turbinowych, które nie mogą być
wyjaśnione wadami materiału lub zbyt wysokimi naprężeniami od sił odśrodkowych, są
zwykle wynikiem poprzecznych drgań giętnych tarczy. Przy określonej prędkości obrotowej
drgania takie mogą stać się bardzo gwałtowne i prowadzić do pęknięć zmęczeniowych i
zniszczenia tarczy. Najważniejszą przyczyną, która może powodować drgania giętne tarcz
jest nierównomierność ciśnienia czynnika na obwodzie tarczy.
W maszynach wirnikowych z łożyskami ślizgowymi olejonymi hydrodynamicznie
ważną rolę odgrywa efekt łożyskowy. Poza obniżaniem prędkości krytycznych wirnika może
on prowadzić do utraty stateczności i ustalonego ruchu obrotowego wirnika i powstania drgań
samowzbudnych. Znaczenie zagadnienia drgań wirników w łożyskach ślizgowych wzrasta
gwałtownie ze wzrostem szybkobieżności maszyny lub zmniejszeniem względnej sztywności
wirnika, tzn. ze zmniejszeniem jego prędkości krytycznych w stosunku do prędkości
roboczej, jak ma to miejsce w przypadku generatorów wielkiej mocy.
Wpływ filmu olejowego na drgania ma efekt podwójny. Z jednej strony klin olejowy,
działając jako element podatny, zmniejsza prędkości krytyczne wirnika, tj. obniża częstość
rezonansowych drgań wymuszonych, które odbywają się z częstością sił wymuszających, a
więc z częstością obrotów. Z drugiej strony wpływ ten może prowadzić do utraty stateczności
ruchu obrotowego czopów wirnika w łożyskach i powstania drgań samowzbudnych.
Drgania potęgują naprężenia dynamiczne które są przyczyną zjawisk zmęczeniowych
w maszynach i ich elementach. Duży poziom drgań, zarówno wewnętrznych jak i
zewnętrznych, obniża dokładność działania maszyn poprzez zwiększenie ich dynamicznych
błędów kształtu i położenia.
Dla maszyn i urządzeń nadmierne drgania dają zmniejszenie trwałości, niezawodności,
dokładności oraz zwiększenie emisji hałasu i drgań w otoczeniu. Hałas wywołany drganiami

(powyżej 130 dB) powoduje zjawiska akustycznego zmęczenia konstrukcji, a przekroczenie
nominalnego poziomu drgań jest przyczyną awarii maszyn. Aby uniknąć szkodliwego
wpływu drgań na wytrzymałość konstrukcji należy już na etapie prac projektowych i budowy
prototypów zmniejszać obciążenia dynamiczne, które są ich główną przyczyną.
Drgania mechaniczne są jednym z bardziej skomplikowanych zjawisk w mechanice (ISO
5349.2:1984), a do wywołania emisji drgań mechanicznych konieczna jest zmiana
parametrów obciążenia ośrodka (np. siły, masy, naprężenia) spowodowana dostarczeniem
pewnej ilości energii. Obszar (obiekt), do którego jest dostarczona energia staje się źródłem
drgań, a zamiana parametrów obciążenia w obszarze źródła powoduje powstanie drgań
mechanicznych. [25,30,32,33]
Można łatwo zauważyć, że sinusoidalna zmiana parametrów obciążenia wywoła drgania,
ale impuls obciążenia, to jest nagłe wychylenie obiektu obserwacji z położenia równowagi i
równie szybki powrót do stanu początkowego, wywoła powstanie zjawiska, które w
potocznym rozumieniu trudno jest nazwać drganiami mechanicznymi. Takie impulsowe
zjawiska określa się jako wstrząsy mechaniczne. Wprowadzenia pojęcia wstrząsu
mechanicznego umożliwia sformułowanie następujących wniosków:
w następstwie działania wstrząsu powstają drgania gasnące. Jeżeli impuls wymuszający
zmianę obciążenia źródła powtarza się dostatecznie rzadko, np. 1 raz/h, to niewątpliwie
jest to wstrząs (ponieważ wywołane drgania gasnące zmaleją do zera),
jeżeli kolejne impulsy pojawiać się będą w coraz krótszych odstępach czasu, to przy
pewnej częstotliwości ich powtarzania kolejny impuls pojawia się wcześniej niż
wygasną drgania wzbudzone przez impuls poprzedni. Kolejne drgania będą się nakładać
na siebie tak, że ich amplituda będzie narastała Pewna wartość amplitudy będzie się
utrzymywać, aż do ustania kolejnych impulsów wywołujących to zjawisko.
W drugim przypadku nie ma już drgań gasnących, a przeprowadzony eksperyment
obrazuje często spotykany w praktyce sposób generacji drgań mechanicznych, jakim jest
superpozycja kolejnych mechanicznych pobudzeń impulsowych. Wprowadzenie podziału na
drgania mechaniczne (wibracje) i wstrząsy jest nie tylko problemem teoretycznym; warunkuje
on zarówno różnicowanie reakcji organizmu, jak i wymusza szereg przedsięwzięć
metodycznych w ocenie zagrożenia, a także decydujące o wyborze sposobów jego redukcji.
Na rysunku 2.11 przedstawiono podział drgań ze względu na ich przebieg w funkcji czasu,
zaś odpowiadające temu podziałowi przebiegi czasowe przedstawiono na rysunku 2.12.
Rys. 2.11. Podział drgań ze względu na ich przebieg w funkcji czasu [32]
Według przytoczonej klasyfikacji wyróżnia się dwie grupy drgań:
drgania określone dzielone dalej na drgania okresowe, w których wyróżnia się: drgania
sinusoidalne (harmoniczne) i poliharmoniczne (składające się z kilku drgań
DRGANIA
określone
okresowe
sinusoidalne poliharmo-
niczne
nieokre-sowe
transien-towe
wstrząsy
losowe
stacjonarne
ergodyczne nieergodyczne
nie-stacjonarne
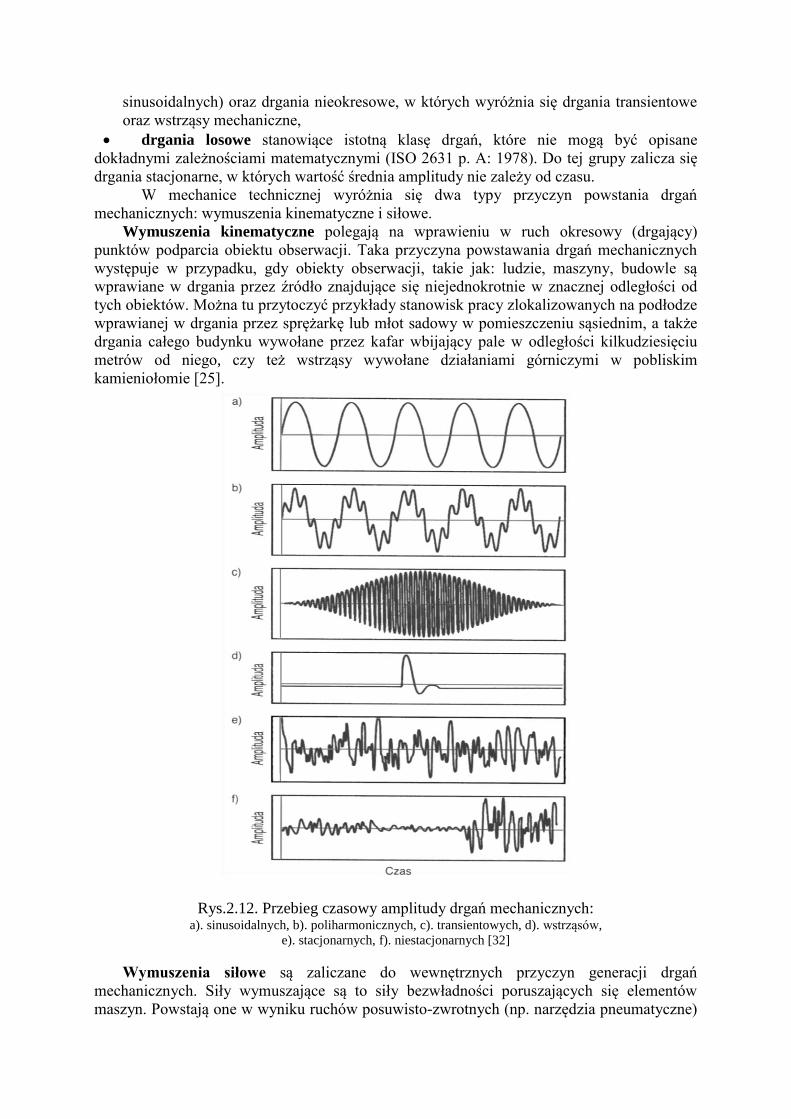
sinusoidalnych) oraz drgania nieokresowe, w których wyróżnia się drgania transientowe
oraz wstrząsy mechaniczne,
drgania losowe stanowiące istotną klasę drgań, które nie mogą być opisane
dokładnymi zależnościami matematycznymi (ISO 2631 p. A: 1978). Do tej grupy zalicza się
drgania stacjonarne, w których wartość średnia amplitudy nie zależy od czasu.
W mechanice technicznej wyróżnia się dwa typy przyczyn powstania drgań
mechanicznych: wymuszenia kinematyczne i siłowe.
Wymuszenia kinematyczne polegają na wprawieniu w ruch okresowy (drgający)
punktów podparcia obiektu obserwacji. Taka przyczyna powstawania drgań mechanicznych
występuje w przypadku, gdy obiekty obserwacji, takie jak: ludzie, maszyny, budowle są
wprawiane w drgania przez źródło znajdujące się niejednokrotnie w znacznej odległości od
tych obiektów. Można tu przytoczyć przykłady stanowisk pracy zlokalizowanych na podłodze
wprawianej w drgania przez sprężarkę lub młot sadowy w pomieszczeniu sąsiednim, a także
drgania całego budynku wywołane przez kafar wbijający pale w odległości kilkudziesięciu
metrów od niego, czy też wstrząsy wywołane działaniami górniczymi w pobliskim
kamieniołomie [25].
Rys.2.12. Przebieg czasowy amplitudy drgań mechanicznych: a). sinusoidalnych, b). poliharmonicznych, c). transientowych, d). wstrząsów,
e). stacjonarnych, f). niestacjonarnych [32]
Wymuszenia siłowe są zaliczane do wewnętrznych przyczyn generacji drgań
mechanicznych. Siły wymuszające są to siły bezwładności poruszających się elementów
maszyn. Powstają one w wyniku ruchów posuwisto-zwrotnych (np. narzędzia pneumatyczne)

lub obrotowych określonych podzespołów maszyn. W drugim przypadku siły bezwładności są
następstwem niewyważenia statycznego i dynamicznego wirujących mas [25].
Ważną grupą wymuszeń siłowych są wzajemne zderzenia elementów maszyn, zarówno
robocze (uderzenia młotów, narzędzi udarowych, a także przekazywanie energii z jednego
elementu do drugiego, np. przekładni zębatych, łożysk tocznych itp.), jak i „pasożytnicze”
(niedokładność montażu). Krótkotrwałe impulsy siłowe, powstające w momencie zetknięcia
się mas, mają na ogół duże wartości. Im krótszy czas trwania zderzenia, tym bardziej
szerokopasmowe jest widmo drgań. Istotne znaczenie mają także pulsacje ciśnienia. Gazowe
lub cieczowe czynniki robocze w ograniczonej przestrzeni maszyny lub instalacji
przemysłowej, na ogół w trakcie przekształcania energii z jednej postaci w drugą, stają się
źródłami drgań o dużych wartościach amplitud.
Takie urządzenia, jak: silniki spalinowe, pompy, wentylatory, rurociągi są
charakterystycznymi źródłami generacji drgań pochodzących od pulsacji ciśnień
różnorodnych mediów energetycznych. Należy podkreślić, że w praktyce często występują
jednocześnie dwie lub wszystkie wymienione przyczyny generacji drgań. Jednym z bardzo
istotnych zadań przy pracach ograniczających ich emisję jest jakościowe oraz jeszcze
trudniejsze, ilościowe określenie udziału poszczególnych przyczyn generacji w procesie
wynikowym.
Źródła drgań o oddziaływaniu przez kończyny górne [32]:
narzędzia ręczne (młotki), narzędzia udarowe o napędach: elektrycznym,
pneumatycznym i hydraulicznym (młotki pneumatyczne, ubijaki mas formierskich,
nitowniki, wiertarki udarowe i udarowo-obrotowe, klucze udarowe),
narzędzia ręczne obrotowe (wiertarki, piły łańcuchowe) o napędach jak wyżej,
dźwignie sterujące maszyny i pojazdów obsługiwane rękami lub nogami,
źródła technologiczne (np. obrabiane elementy trzymane w dłoniach przy procesach
szlifowania, gładzenia i polerowania),
maszyny do obróbki drewna obsługiwane ręcznie (piły tarczowe, strugarki).
Źródła drgań o oddziaływaniu ogólnym:
prasy mechaniczne i hydrauliczne,
przesiewacze sitowe,
wtryskarki i prasy do tworzyw sztucznych i gumy,
maszyny do produkcji, transportu i układania mieszanki betonowej, zapraw oraz zbrojeń
i kruszyw mineralnych,
maszyny do robót ziemnych, fundamentowych i zagęszczania gruntów,
urządzenia i elementy wentylacji miejscowej,
urządzenia filtracyjno-wentylacyjne.
Bardzo ważne w tej grupie, a przy tym słabo rozpoznane od strony wytwarzanego
zagrożenia są pojazdy drogowe, a zwłaszcza: samochody ciężarowe, ciągniki rolnicze,
autobusy, tramwaje, trolejbusy. Natomiast w grupie pojazdów kolejowych do źródeł drgań
zaliczyć należy lokomotywy elektryczne, spalinowe, parowe. Przytoczony podział należy
traktować jako przykładowy. Wymienione źródła drgań nie wyczerpują całości zagadnienia.
Wynika to zarówno z liczebności spotykanych w praktyce maszyn i urządzeń, jak i szeregu
niejasności w samym podziale na drgania o oddziaływaniu ogólnym i miejscowym [25,30].

2.4. MODEL GENERACJI SYGNAŁU DRGANIOWEGO
Drgania mechaniczne są niejednokrotnie celowo generowanym niezbędnym czynnikiem
do realizacji określonych procesów technologicznych, często jednak stanowią tzw. czynnik
resztkowy, który w sposób niezamierzony towarzyszy eksploatacji maszyn i urządzeń. W obu
przypadkach drgania mechaniczne generowane przez różnego rodzaju źródła mogą
powodować uszkodzenia konstrukcji, hal fabrycznych, a także samych maszyn i urządzeń.
Mogą też zakłócać procesy technologiczne, często są również źródłem hałasu. Ponadto, przy
bezpośrednim kontakcie człowieka z drgającym źródłem, drgania te są przekazywane do jego
organizmu bez udziału środowiska powietrznego i zależnie m.in. od ich intensywności oraz
czasu narażenia mogą stanowić zagrożenie dla zdrowia, a nawet życia ludzkiego.
Procesy wibroakustyczne są to zjawiska dynamiczne zachodzące w środowisku lub
urządzeniu technicznym z częstotliwością od zera do kilkudziesięciu tysięcy herców. Są one
bogate w informacje o zagrożeniach środowiska lub o stanie maszyny, stosunkowo łatwe do
obserwacji i rejestracji, przetwarzania i identyfikacji. Procesy wibroakustyczne możemy
przedstawić w następującej postaci [5, 27,31]:
generacja sił zmiennych w czasie, działających na strukturę i otaczające środowisko,
propagacja i transformacja energii w strukturach i płynach oraz elementach środowiska,
promieniowanie dźwięków i poprzez elementy stref środowiska i struktur
mechanicznych.
Badania procesów wibroakustycznych są w wielu przypadkach bardzo skomplikowane a
w szczególności wówczas, kiedy procesy wibroakustyczne występują w rzeczywistych
układach fizycznych. Badania procesów odbywają się na drodze teoretycznej, przy
zastosowaniu różnych metod analizy oraz na drodze empirycznej. W analizie procesów
wibroakustycznych bierze się pod uwagę takie aspekty jak:
czasowy i przestrzenny rozkład energii pochodzącej ze źródła,
odpowiedź układu oraz przenoszenie przez propagujące media,
współzależność między źródłami.
Do badań procesów drganiowych stosuje się metody energetyczne, metody
dyskretyzacyjne, a w szczególności metodę elementów brzegowych, metodę elementów
skończonych (MES), metody analizy modalnej oraz metodę analizy przepływu mocy
akustycznej [21,33].
Wytyczne do konstrukcji i wytwarzania maszyn płyną głównie z planowanego
sposobu realizacji zadania, które ma ona wykonywać w systemie produkcyjnym. Z jednej
strony projekt maszyny musi być dostosowany do możliwości inżynierii materiałowej
(dostępność odpowiednich tworzyw) oraz musi uwzględniać poziom technologiczności
wytwarzania zakładu produkcyjnego. Z drugiej strony należy dostosować konstrukcję i
sposób wykonania maszyny do struktury systemu produkcyjnego i sposobu eksploatacji,
który wynika z wybranego sposobu realizacji zadania. Ujawnia się tu zatem nadrzędne
stanowisko eksploatacji maszyny w systemie produkcyjnym w stosunku do projektowania i
wytwarzania maszyny. Można powiedzieć, że eksploatacja niejako determinuje strukturę
maszyny oraz procesy główne w niej zachodzące podczas pracy.
Ocena stanu dynamicznego maszyn za pomocą generowanych przez nie procesów
fizycznych wymaga jednoznacznego skojarzenia parametrów funkcjonalnych ocenianego
obiektu ze zbiorem miar i ocen procesów wyjściowych wykorzystywanych w diagnostyce, co
stanowi podstawę budowanych procedur diagnostyki maszyn.
Chcąc w pełni skorzystać z informacji o stanie technicznym maszyny zawartych w
emitowanych procesach wyjściowych, należy najpierw zapoznać się z mechanizmem ich
generacji oraz z ich charakterem.

Podczas funkcjonowania maszyn, na skutek istnienia szeregu czynników
zewnętrznych (wymuszenia środowiska, od innych maszyn) oraz wewnętrznych (starzenie,
zużycia, współpraca elementów) w maszynie następują zaburzenia stanów równowagi, które
rozchodzą się w ośrodku sprężystym - materiale, z którego zbudowana jest maszyna.
Zaburzenia mają charakter dynamiczny i zachowują warunki równowagi pomiędzy stanem
bezwładności, sprężystości, tłumienia i wymuszenia. Zaburzenia rozchodzą się od źródeł w
postaci fal w sposób zależny od własności fizycznych oraz granic konfiguracji, wymiarów i
kształtów maszyny. Powoduje to w konsekwencji rozpraszanie energii fal, ich ugięcia,
odbicia i wzajemne nakładanie się. Istnienie źródeł i rozprzestrzenianie się zaburzeń
powoduje występowanie drgań elementów maszyny i otaczającego je środowiska.
Zależnie od źródeł i warunków propagacji wyjściowe procesy dynamiczne
odzwierciedlają w praktyce wiele istotnych własności konstrukcyjnych, wykonawczych i
montażowych elementów i par kinematycznych maszyny oraz warunki jej funkcjonowania we
współpracy z innymi urządzeniami w systemie produkcyjnym.
Procesy tarcia i zużycia towarzyszą nieodłącznie procesowi użytkowania maszyn,
zakłócając, a w końcu uniemożliwiając wykorzystanie maszyny. Współczynnik tarcia, siła lub
moment tarcia charakteryzują własności maszyny związane ze stanem powierzchni (mikro-
nierówności, falistość), jakością obróbki cieplnej tych powierzchni (ziarnistość, stan
struktury), stanem obróbki plastycznej (zgniot, nagniatanie, pneumokulowanie), stanem
środowiska (warunki smarowania, aktywność chemiczna, temperatura), stanem obciążeń
(wartość, charakter) itd. Zagadnienia dotyczące zużycia powierzchniowego, konstytuowania
własności warstwy wierzchniej oraz wyznaczania warunków jej pracy, w świetle generowania
informacji diagnostycznej, nabierają znaczenia pierwszoplanowych poczynań.
Procesy termodynamiczne jako główne w wielu maszynach (np. silniki spalinowe,
turbiny cieplne) są źródłem wielu skomplikowanych w opisie procesów dynamicznych,
kształtujących procesy wyjściowe wykorzystywane w diagnostyce. Ich wpływ na warunki
smarowania, chłodzenia, kształtowanie zużywania się warstwy wierzchniej jak i często
dominujący charakter procesów cieplnych (spalanie w silniku spalinowym) wyznaczają
znaczącą ich rolę w kształtowaniu procesów wyjściowych.
Inne procesy (elektryczne, magnetyczne, objętościowe), których opis i wykorzystanie
w diagnostyce jest jeszcze niewielkie, są źródłem wielu obciążeń dynamicznych znajdujących
swoje odzwierciedlenie w analizie i opisie zmiennych stanów dynamicznych maszyny.
Wyodrębniając w analizie stanu dynamicznego maszyny procesy wejściowe, strukturę
i procesy wyjściowe, należy pamiętać o ich losowym charakterze. Wejście wewnętrzne,
traktowane jako zbiór wielkości wymuszających określających strukturę maszyny (kształt,
jakość wykonania, luzy itd.) i sposób współpracy elementów jest kształtowane w warunkach
losowych podczas wytwarzania i ujawnia się tymi własnościami losowymi podczas
funkcjonowania. Wejście zewnętrzne, określające warunki współpracy maszyny z innymi
elementami systemu produkcyjnego (zmiany obciążeń, prędkości, wpływ środowiska) ma w
praktyce również charakter losowy.
Charakter tych wymuszeń oraz sposób w jaki przebiegają procesy przez nie
generowane stanowią z reguły o własnościach losowych wykorzystywanych w diagnostyce
proce-sów wyjściowych, prowadząc do budowy deterministyczno-probabilistycznych modeli
diagnostycznych. Składowa deterministyczna modelu reprezentuje idealną strukturę i sposób
działania maszyny, niezbędne do realizacji zadania i pozostaje niezmienna w czasie
funkcjonowania. Składowa probabilistyczna reprezentuje indeterminizm powstały w wyniku
istniejących odchyłek od ideału, na skutek losowości struktury i zdarzeń podczas
funkcjonowania.

Bogactwo możliwości losowości i istnienia zakłóceń jest przyczyną dodatkowych
założeń dotyczących wejść oraz zachodzących transformacji stanów maszyny. Dotyczą one
założeń o liniowości, stacjonarności i ergodyczności obiektów i procesów [1,2,3].
W wyniku istnienia wejścia i realizacji transformacji stanów odzwierciedlających
procesy zachodzące w obiekcie, powstaje szereg dających się mierzyć objawów
charakterystycznych, zawartych w procesach wyjściowych z maszyny. Procesy te są
podstawą do budowy modelu generacji sygnałów, determinującego sposób budowy,
funkcjonowania i zmian stanów diagnozowanego obiektu technicznego lub maszyny.
Cechy modelu generacji sygnałów drganiowych dla maszyn o stacjonarnym ruchu
okresowym T i losowych zakłóceniach [2, 25]:
1. Stan maszyny określony jest jednoznacznie przez sygnał charakterystyczny (t,), 0 t T,
0 aw, generowany oddzielnie przy każdym obrocie. Sygnał ten ulega zmianom w czasie
dynamicznym „t” oraz ewolucji w czasie wolnym „”.
2. Sygnał charakterystyczny jest złożony z procesu zdeterminowanego o i przypadkowego „n”,
zaś jego intensywność i dynamika zmian charakteryzują stan maszyny. Tak więc podczas i –
tego obrotu wygenerowany jest sygnał:
i(t,) = o(t,) + ni(t,) , t (, T) (2.17)
3. Ruch obrotowy maszyny (okresowy) przekształca sygnał charakterystyczny przez tzw.
transformację kinematyczną na sygnał x(t,). W pierwszym przybliżeniu transformację tę
można rozumieć jako T – okresowe powtarzanie sygnału okresowego, według zależności:
x(t,) =i
1
i(t – iT, ) u(t – iT) =i
1
i(t, ) (t – iT) (2.18)
gdzie: ,0)iTt(,1
0)iTt(,0)iTt(u
zaś gwiazdka „” oznacza operację splotu oraz (t – iT) –
okresową dystrybucję Diraca.
4. Przekształcony sygnał charakterystyczny będący odwzorowaniem oddziaływań
dynamicznych jest odbierany jako y(t,) i w najprostszym przypadku jest odpowiedzią układu
dynamicznego o charakterystyce impulsowej h(t,) na wymuszenie x(t,). Uwzględniając
rozległość przestrzenną „r” maszyny można napisać:
y(,r) = i
1
i(t,,r) h(t,,r) (t - iT) (2.19)
5. Procesy wyjściowe maszyny (selektywnie) wpływają zwrotnie na procesy zużyciowe, a stan
eksploatacyjny maszyny przez dodatnie, destrukcyjne sprzężenie zwrotne, zniekształcając
sygnał i(t,).
6. Dla ustalonej wartości czasu eksploatacji = const wszystkie obiekty dynamiczne traktowane
są jako liniowe, stacjonarne układy, których własności opisuje jednoznacznie odpowiedź
impulsowa h(t,,r) albo jej transformaty: operatorowa Laplace’a H(p,) lub widmowa
Fouriera H(j,).
Zaburzenia takie mają charakter dynamiczny i zachowują warunki równowagi pomiędzy
stanem bezwładności, sprężystości, tłumienia i wymuszenia i rozchodzą się od źródeł w
postaci fal w sposób zależny od własności fizycznych oraz granic konfiguracji, wymiarów i
kształtów maszyny. W konsekwencji powoduje to rozproszenie energii fal, ich ugięcia,
wzajemne nakładanie się i odbicia. Występowanie źródeł i rozprzestrzenianie się zaburzeń
powoduje występowanie drgań obiektu technicznego i otaczającego go środowiska.
Zależnie od źródeł i warunków rozprzestrzeniania się zaburzeń wyjściowe procesy
dynamiczne odzwierciedlają wiele istotnych własności konstrukcyjnych, wykonawczych i
montażowych par kinematycznych i elementów maszyny. Wyodrębniając w analizie stanu
dynamicznego procesy wejściowe, strukturę oraz procesy wyjściowe, należy zwrócić
szczególną uwagę na fakt, iż posiadają one losowy charakter. Bogactwo wystąpienia
losowości oraz możliwych zakłóceń stanowi przyczynę do określenia dodatkowych założeń,
dotyczących wejść oraz zachodzących transformacji stanów obiektów technicznych.
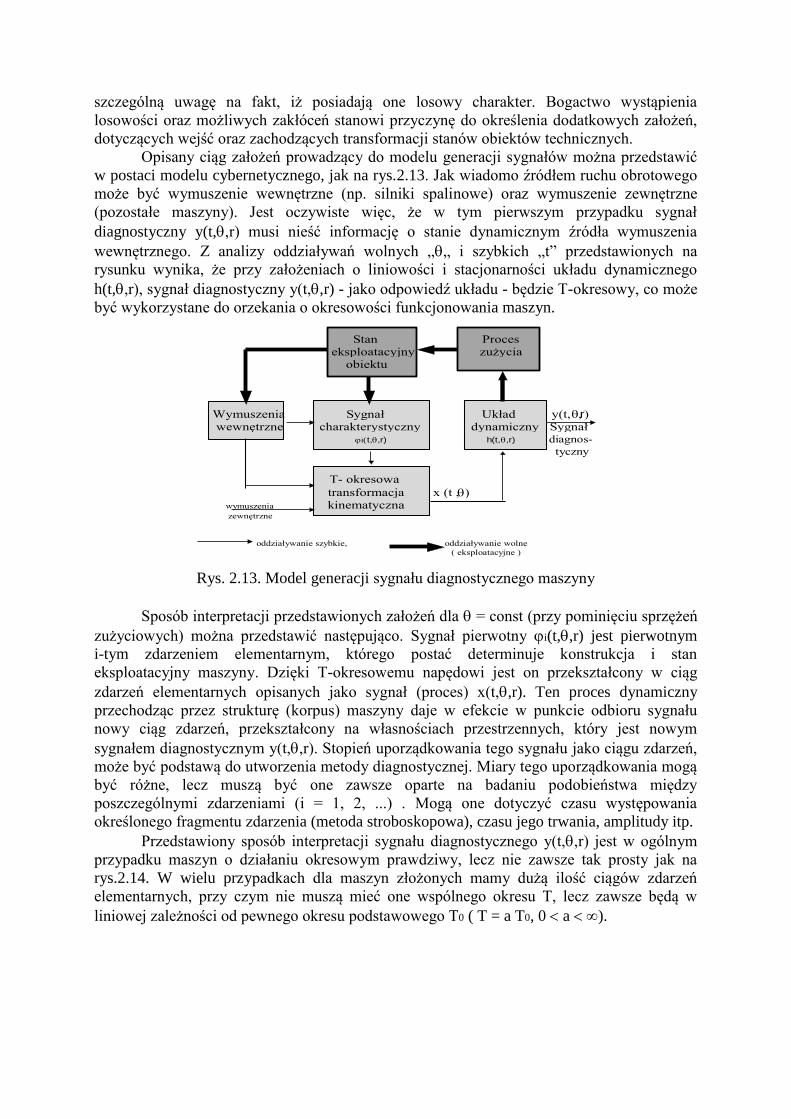
Opisany ciąg założeń prowadzący do modelu generacji sygnałów można przedstawić
w postaci modelu cybernetycznego, jak na rys.2.13. Jak wiadomo źródłem ruchu obrotowego
może być wymuszenie wewnętrzne (np. silniki spalinowe) oraz wymuszenie zewnętrzne
(pozostałe maszyny). Jest oczywiste więc, że w tym pierwszym przypadku sygnał
diagnostyczny y(t,,r) musi nieść informację o stanie dynamicznym źródła wymuszenia
wewnętrznego. Z analizy oddziaływań wolnych „„ i szybkich „t” przedstawionych na
rysunku wynika, że przy założeniach o liniowości i stacjonarności układu dynamicznego
h(t,,r), sygnał diagnostyczny y(t,,r) - jako odpowiedź układu - będzie T-okresowy, co może
być wykorzystane do orzekania o okresowości funkcjonowania maszyn.
Rys. 2.13. Model generacji sygnału diagnostycznego maszyny
Sposób interpretacji przedstawionych założeń dla = const (przy pominięciu sprzężeń
zużyciowych) można przedstawić następująco. Sygnał pierwotny i(t,,r) jest pierwotnym
i-tym zdarzeniem elementarnym, którego postać determinuje konstrukcja i stan
eksploatacyjny maszyny. Dzięki T-okresowemu napędowi jest on przekształcony w ciąg
zdarzeń elementarnych opisanych jako sygnał (proces) x(t,,r). Ten proces dynamiczny
przechodząc przez strukturę (korpus) maszyny daje w efekcie w punkcie odbioru sygnału
nowy ciąg zdarzeń, przekształcony na własnościach przestrzennych, który jest nowym
sygnałem diagnostycznym y(t,,r). Stopień uporządkowania tego sygnału jako ciągu zdarzeń,
może być podstawą do utworzenia metody diagnostycznej. Miary tego uporządkowania mogą
być różne, lecz muszą być one zawsze oparte na badaniu podobieństwa między
poszczególnymi zdarzeniami (i = 1, 2, ...) . Mogą one dotyczyć czasu występowania
określonego fragmentu zdarzenia (metoda stroboskopowa), czasu jego trwania, amplitudy itp.
Przedstawiony sposób interpretacji sygnału diagnostycznego y(t,,r) jest w ogólnym
przypadku maszyn o działaniu okresowym prawdziwy, lecz nie zawsze tak prosty jak na
rys.2.14. W wielu przypadkach dla maszyn złożonych mamy dużą ilość ciągów zdarzeń
elementarnych, przy czym nie muszą mieć one wspólnego okresu T, lecz zawsze będą w
liniowej zależności od pewnego okresu podstawowego T0 ( T = a T0, 0 a ).
Stan Proces eksploatacyjny zużycia obiektu
Wymuszenia Sygnał Układ y(t,r wewnętrzne charakterystyczny dynamiczny Sygnał
it,,r) h(t,,r) diagnos-
tyczny
T- okresowa
transformacja x (t , wymuszenia kinematyczna zewnętrzne
oddziaływanie szybkie, oddziaływanie wolne
( eksploatacyjne )

napęd
u x y T 2T
T T 2T
t t t
T - okresowa
transformacja Układ
kinematyczna dynamiczny
i(t,,r) x(t,)=iri h(t,,r) y=hiri
Rys. 2.14. Transformacja sygnału charakterystycznego i w sygnał diagnostyczny y
(dla = const) jako model generacji sygnału w maszynach o ruchu obrotowym
Przykładem takiego ujęcia zagadnienia jest przekładnia główna mostu pojazdu, której
model generacji przedstawiono na rys.2.15. Odbierany sygnał wyjściowy w dowolnym
miejscu obudowy przekładni jest ważoną sumą odpowiedzi na wszystkie zdarzenia
elementarne Un(t,,r), występujące zawsze w tej samej sekwencji w poszczególnych układach
dynamicznych cząstkowych o impulsowej funkcji przejścia hn(t,,r). Oddziaływania te po
przejściu przez właściwe układy dynamiczne sumują się i ulegają dodatkowemu
przekształceniu na korpusie przekładni, przy czym zmiana miejsca odbioru sygnału „r”
związana jest również ze zmianą transmitancji. Przez n(t,) oznaczono tu przypadkowe
oddziaływanie występujące z tytułu obecności mikrozjawisk dynamicznych takich jak tarcie,
nierówności itp.
Rys.2.15. Model generacji sygnału diagnostycznego przekładni zębatej
Sygnał wyjściowy dowolnego punktu odbioru można wyrazić w przybliżeniu wzorem: k
yk(t,,r) = a (k) hi (t,,r) [ui (t,,r) + n (t,,r)] (2.20) i=1 gdzie: - impulsowa funkcja przejścia h(*) ujmuje również własności korpusu,
- a(k) daje różne wagi sumowania związane z miejscem odbioru „r”.
Ciąg zdarzeń Układ dynamicz- Korpus Możliwe miejsca
pierwotnych ny cząstkowy przekładni odbioru sygnału
+ wałek atakujący- x1 (t,) 1
u1 (t,) łożyska
h1 (t,)
wałek atakujący- x2 (t,) 2
+ koło talerzowe
n (t,) wejście zęba h2 (t,) + y (t,,r)
w przypór obudowa mech.
różnicowego - x3 (t,) 3
+ łożyska
u3 (t,) h3 (t,)
r
półosie - xn (t,) 4
+ mech. różnicowy
un (t,) hn (t,)

Odbierany w wybranym miejscu korpusu sygnał jest ważoną sumą odpowiedzi na
wszystkie zdarzenia elementarne un (t,,r). Funkcje wagi przy tym sumowaniu mogą w naj-
prostszym przypadku mieć charakter współczynników an, lecz ogólnie będzie to mnożenie
splotowe (dwukrotne) przez impulsowe funkcje przejścia korpusu, od punktu wzbudzenia do
punktu odbioru. W wielu zatem przypadkach szczegółowych modeli generacji sygnałów,
sygnały te mogą mieć bardzo skomplikowany charakter, a co za tym idzie mogą nieść
ogromną ilość informacji - nie zawsze koniecznych.
W pewnych przypadkach diagnostyki maszyn udaje się, poprzez model generacji
sygnałów, wyodrębnić ciąg zdarzeń elementarnych o stosunkowo niewielkich
zniekształceniach z tytułu przejścia przez układy dynamiczne pośrednie. Dobrym przykładem
może tu być silnik spalinowy i problem oceny stanu przestrzeni nadtłokowej za pomocą
następujących zjawisk: 1. pulsacje podciśnienia w gardzieli gaźnika; 2. pulsacja ciśnienia w
skrzyni korbowej; 3. pulsacje nadciśnienia w rurze wydechowej. W każdym z tych
przypadków sygnał diagnostyczny niewiele odbiega od elementarnego ciągu zdarzeń i jako
mało zniekształcony ma duży ładunek informacji o interesującym układzie. W przypadku
pierwszym informacje te dotyczą szczelności w układzie cylindrów i stanu zaworów
wlotowych, w drugim - szczelności w układzie cylindrów, w trzecim - stanu całego układu
łącznie z charakterem procesu spalania.
Powyższe rozważania dowodzą, że dla maszyn i mechanizmów o prostej strukturze
kinematycznej i funkcjonalnej możliwe jest utworzenie prostego i skutecznego modelu
generacji symptomów uszkodzenia. Umożliwia on analityczne bądź jakościowe rozróżnienie
między symptomami maszyny zdatnej i narastającego na tym tle symptomu uszkodzenia.
W przypadkach bardziej skomplikowanych modele takie dają możność adaptacji
znanych miar sygnału do celów diagnostyki, opracowanie nowych miar, a także analityczne
przebadanie wrażliwości miar sygnałów lub też celowości stosowania niektórych operacji
przetwarzania sygnałów. Modele takie dają możność zdeterminowanego określenia relacji
stan - sygnał, a tym samym udzielenie odpowiedzi na pytanie co mierzyć.
Odrębnym problemem są maszyny o skomplikowanej strukturze konstrukcyjnej i
funkcjonalnej, gdzie proste modele generacji nie zdają egzaminu z racji dużego poziomu
zakłóceń. W tych przypadkach rozwiązania problemu należy szukać na drodze długotrwałych
obserwacji maszyny, bądź poprzez właściwe zaprojektowanie eksperymentów na grupie
obiektów. W wyniku uzyskuje się efekty statystycznego próbkowania krzywych życia, z
których specjalizowane procedury statystyczne pozwalają wyróżnić miary i charakterystyki
sygnału, przydatne w diagnozowaniu. Niezależnie od trudności i złożoności omawianych zagadnień, każdorazowo analiza
modeli generacji procesów (sygnałów) diagnostycznych winna wskazać miary oraz zakres ich
zmienności, które najlepiej odzwierciedlają zmiany stanu i zachowanie się maszyny w
określonych warunkach. W zastosowaniu diagnostycznym, niezależnie od formy, w jakiej został wprowadzony
sygnał wibroakustyczny do systemu diagnostycznego, musi zostać przetworzony do postaci
zbiorów parametrów, których wartości są podstawą opisu cech stanów obiektów
diagnostycznych. Wybór tych parametrów zasadniczo wpływa na efektywność procesów
diagnozy, przy czym często brakuje przesłanek dla optymalizacji tego wyboru.
Wiele rozpatrywanych przypadków szczegółowych modeli generacji sygnałów może
posiadać skomplikowany charakter sygnału a w związku z tym sygnał może nieść ogromną
ilość informacji. Maszynom o prostej strukturze kinematycznej i funkcjonalnej odpowiadają
proste a zarazem skuteczne modele generacji symptomów uszkodzenia, co umożliwia
analityczne lub jakościowe różnicowanie pomiędzy symptomami maszyny zdatnej i
narastającymi na jej tle symptomami uszkodzenia.

Dla obiektów o bardziej skomplikowanej strukturze konstrukcyjnej i funkcjonalnej, w
których proste modele generacji nie sprawdzają się z racji dużego poziomu zakłóceń,
rozwiązanie problemu szuka się na drodze długotrwałych obserwacji maszyny lub poprzez
właściwe zaprojektowanie eksperymentów na grupie obiektów. W wyniku takiego
rozwiązania otrzymujemy efekt statystyczny próbkowania krzywych życia, z których
specjalne procedury statystyczne pozwalają wyróżnić miary i charakterystyki sygnału
przydatne w procesie diagnozowania stanu obiektu [4,5].
Nowoczesne systemy pomiarowe stosowane do celów diagnostyki wibroakustycznej
maszyn składają się z dwóch części: sprzętu z wbudowanymi modułami akwizycji danych
oraz oprogramowania z wbudowanymi modułami analizy, archiwizacji i zarządzania danymi
pomiarowymi jak i pracą całego systemu. Taka struktura systemu pomiarowego umożliwia
łatwą rozbudowę systemu o kolejne specjalistyczne moduły, co umożliwi włączenie takiego
systemu do dowolnych struktur systemów diagnostycznych [1,9,13,25, 26, 32].
2.5. MIARY PROCESÓW DRGANIOWYCH
Do opisu sygnałów drganiowych emitowanych przez maszyny lub ich otoczenie,
wyodrębnia się ich przebieg w postaci funkcji x(t) przyjmującej wartości rzeczywiste, które
można scharakteryzować w dziedzinie czasu, częstotliwości i amplitud. Rejestracja takiej
funkcji podczas badań, a następnie jej analiza pozwala dla skończonego przebiegu czasu
wyznaczyć cechy sygnału, które są zawsze pewnymi przybliżeniami rzeczywistych wartości.
Wszystkie badane sygnały, charakteryzujące procesy wyjściowe z obiektów
technicznych, można podzielić w ogólny sposób na zdeterminowane, zwane
deterministycznymi i niezdeterminowane, zwane losowymi lub stochastycznymi. Do
zdeterminowanych zaliczamy te, które mogą być opisane za pomocą ścisłych zależności
matematycznych. W wielu przypadkach trudno jest rozstrzygnąć, czy rozpatrywany sygnał
analizowanego procesu fizycznego można opisać w sposób zdeterminowany czy losowy.
Praktycznie o sposobie opisu (zdeterminowanym łub losowym charakterze sygnału) można
rozstrzygnąć próbując odtworzyć go w danych warunkach. Jeżeli wielokrotne powtarzanie
doświadczenia daje jednakowe wyniki (z dokładnością uwzględniającą błąd pomiaru), to
sygnał można uważać za zdeterminowany. W przypadku gdy powtarzanie doświadczenia, w
możliwie dokładnie takich samych warunkach, powoduje otrzymywanie różnych wyników, to
przyjmuje się opis sygnału jako losowy.
Większość sygnałów, z którymi mamy do czynienia w rzeczywistych warunkach
eksploatacyjnych obiektów technicznych, ma charakter losowy. W takim przypadku opisem
badanego zjawiska będzie proces stochastyczny. Proces stochastyczny może być
przedstawiony jako zbiór wszystkich realizacji tego procesu, będących funkcjami czasu. W
praktyce zmierzony sygnał losowy można uważać za odcinek jednej realizacji procesu
losowego, gdy tymczasem wartości cech sygnału losowego powinny być wyznaczane na
podstawie analizy wszystkich jego realizacji.
Aby usunąć tę przeszkodę, wprowadzono pojęcie estymacji, tj. oceny wartości cechy
zmiennej losowej dokonanej na podstawie próby o ograniczonej liczności, a otrzymaną w ten
sposób ocenę nazwano estymatorem. Każdy estymator może dotyczyć jednego lub wielu
procesów zachodzących jednocześnie, będą zatem to estymatory własne lub estymatory
wzajemne.
Inną, wykorzystywaną w diagnostyce drganiowej właściwością procesów losowych jest
ich stacjonarność i ergodyczność [1]. W zastosowaniach praktycznych przyjmujemy, że
sygnały stacjonarne to takie, których uśrednione cechy są stałe w czasie, czyli stała jest
wartość średnia, a funkcja autokorelacji zależy tylko od przesunięcia czasowego.

Ergodyczność natomiast pozwala nam wyznaczać wszystkie cechy probabilistyczne sygnału
losowego, wykorzystując proces uśredniania w czasie jednej tylko funkcji losowej (sygnału
obserwowanego). Opis głównych właściwości sygnałów losowych może być prowadzony w
dziedzinie amplitud, czasu i częstotliwości, przy czym interesować nas mogą funkcje
statystyczne (miary sygnału diagnostycznego) opisujące własności tylko pojedynczego
sygnału lub pary sygnałów (miary wzajemne).
Jeśli funkcja czasowa sygnału x(t) jest określona dla przedziału czasu T, lub jest
periodyczna, to można ją przedstawić w postaci szeregu Fouriera [1,5,13,25,32]:
n
1n
n0 tT
n2sinax)t(x (2.21)
Szereg Fouriera jest sumą przebiegów sinusoidalnych o częstotliwościach równych
kolejnym wielokrotnościom częstotliwości podstawowej f0 = 1/T. Amplitudy an tworzą
dyskretne widmo amplitud sygnału. W praktycznych badaniach maszyn drgania złożone
możemy zatem rozpatrywać jako sumę skończonej lub nieskończonej liczby drgań prostych.
W przypadku, gdy obserwowane w trakcie badań przebiegi sygnałów nie są dokładnie
okresowe i posiadają charakter losowy, wówczas amplitudowe widmo dyskretne traci sens
fizyczny i dlatego wprowadza się widmową gęstość mocy sygnału jako moc sygnału zawartą
w wąskim paśmie częstotliwości B, o częstotliwości środkowej f, uśrednioną w nieskończenie
długim czasie T trwania sygnału w postaci [1,24,25,32]:
dt)B,f,t(xBT
1limlim)f(G
T
0
2
T0Bxx
(2.22)
Widmowa gęstość mocy przedstawia rozkład energii w rozpatrywanym zakresie
częstotliwości, przy czym charakter przebiegu widmowej gęstości mocy zależy od szerokości
pasma analizy. Zastosowanie węższej szerokości pasma prowadzi do uzyskania w wyniku
przeprowadzanej analizy bardziej szczegółowych wyników, jednak w konsekwencji znacznie
wydłuża czas takiej analizy. Częstotliwość i amplitudy widma często podaje się w skali
logarytmicznej, uzyskując dzięki temu rozszerzenie zakresu niskich i zagęszczenie wysokich
wartości analizowanej częstotliwości.
Z dotychczasowych omówionych wielkości oraz zależności wynika, że możliwa jest
także prezentacja drgań w funkcji częstotliwości. Prowadzi to do istotnego w analizie drgań
pojęcia widma drgań, definiowanego jako: zbiór wartości wielkości zmiennej
charakteryzującej drgania (przemieszczenia, prędkości, przyspieszenia), odpowiadający
składowym harmonicznym, przy czym wymienione wartości rozłożone są w rosnący szereg
częstotliwości składowych harmonicznych. Upraszczając tę definicję można powiedzieć, że
widmo drgań przedstawia drgania złożone, rozłożone na proste składowe sinusoidalne.
Analiza widmowa jest jedną z głównych metod badania drgań. Przykładowe przebiegi
czasowe drgań i odpowiadające im widma przedstawiono na rysunku 2.16, gdzie drgania
sinusoidalne w prezentacji częstotliwościowej są przedstawione (przykład a na rys.2.16) za
pomocą pojedynczej linii – prążka, której pozycja na osi częstotliwości (odciętych)
odpowiada częstotliwości drgań. Drgania okresowe – poliharmoniczne (przykład b na
rysunku 2.16) przedstawia widmo wieloprążkowe. W omawianym przykładzie poszczególne
prążki widma rozłożone są w jednakowej odległości od siebie. Ten rodzaj widma nosi nazwę
widma harmonicznego. W praktyce pomiarów wibroakustycznych najczęściej spotyka się
drgania nieokresowe (przykład c na rysunku 2.16). W uproszczeniu można powiedzieć, że
stanowią one sumę nieskończonej liczby drgań sinusoidalnych. W prezentacji
częstotliwościowej poszczególne prążki położone są tak gęsto, że obrazem jest widmo ciągłe.
Opis i sposoby wyznaczania różnych miar procesu drganiowego w dziedzinach: czasu,
częstotliwości i amplitud przedstawiono we wcześniejszych opracowaniach [7,74,75,76,78].

Rys.2.16. Przykładowe przebiegi drgań w funkcji czasu i odpowiadające im widma:
a) dla drgania sinusoidalnego, b) dla przebiegu prostokątnego, c) dla drgania nieokresowego [32]
Obecnie nowoczesne analizatory wyznaczają te wielkości samoczynnie zaraz po
doprowadzeniu analizowanego sygnału. Program analizatora umożliwia przetworzenie
sygnału drganiowego z postaci amplitudy drgań przebiegu czasowego do wybranych
estymatorów procesu drganiowego. Podstawowe funkcje statystyczne pojedynczego sygnału
(rys.2.17) to:
Rys.2.17. Charakterystyki sygnału sinusoidalnego w przedziale zmienności amplitudy: aRMS – wartość skuteczna przyspieszenia, apeak – wartość maksymalna (szczytowa), aśr – wartość średnia,
T – okres drgań, a – wartość chwilowa [32]
- wartość średnia xave:
T
0t
ave dt)t(xT
1limx (2.23)
Estymacja wartości średniej sygnału - wskazuje wartość centrowania informacji. Duże
wahania wartości nominalnej wskazują, że system znajduje się w stanie anormalnym.
Występujący w zależnościach definicyjnych czas T jest interwałem czasu dynamicznego t, w
którym przeprowadzono obserwację zdefiniowanej wielkości. Wartość średnia, ze względu na
najmniejszą wartość diagnostyczną, jest rzadko wykorzystywana, ale z uwagi na jej
podstawowe znaczenia w późniejszych definicjach innych charakterystyk warto ją zapisać,
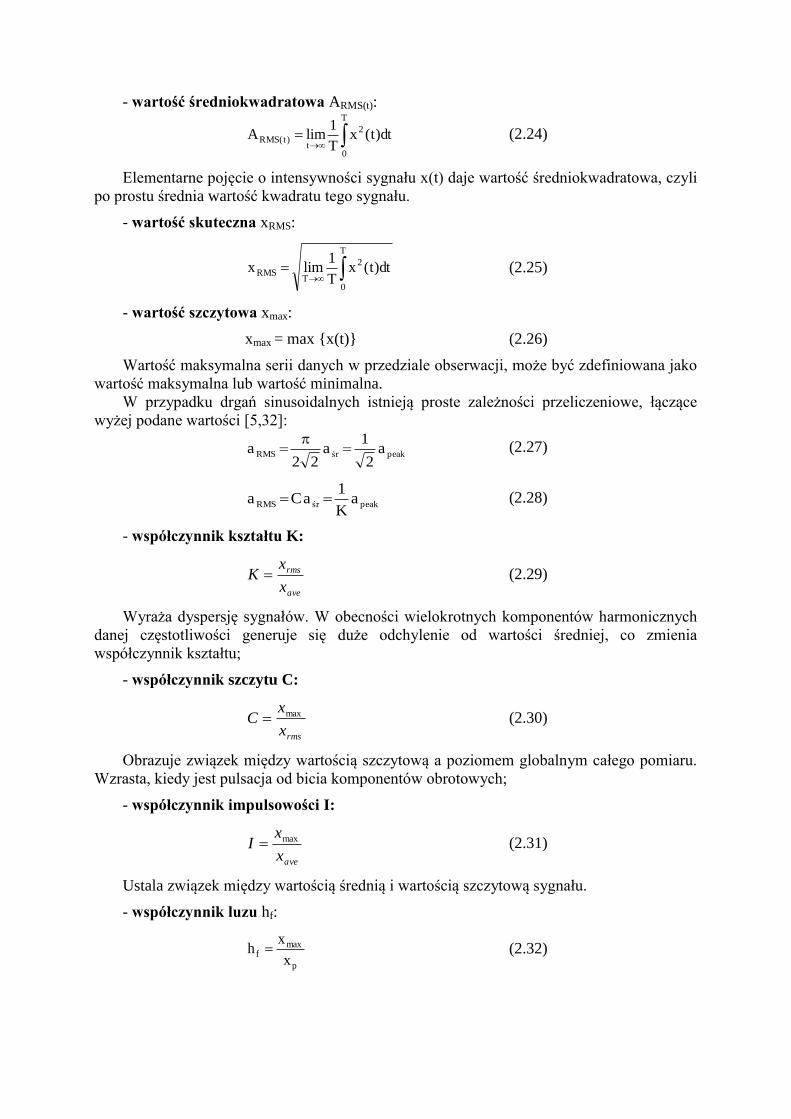
- wartość średniokwadratowa ARMS(t):
T
0
2
t)t(RMS dt)t(x
T
1limA (2.24)
Elementarne pojęcie o intensywności sygnału x(t) daje wartość średniokwadratowa, czyli
po prostu średnia wartość kwadratu tego sygnału.
- wartość skuteczna xRMS:
T
0
2
TRMS dt)t(x
T
1limx (2.25)
- wartość szczytowa xmax:
xmax = max {x(t)} (2.26)
Wartość maksymalna serii danych w przedziale obserwacji, może być zdefiniowana jako
wartość maksymalna lub wartość minimalna.
W przypadku drgań sinusoidalnych istnieją proste zależności przeliczeniowe, łączące
wyżej podane wartości [5,32]:
peakśrRMS a
2
1a
22a
(2.27)
peakśrRMS a
K
1aCa (2.28)
- współczynnik kształtu K:
ave
rms
x
xK (2.29)
Wyraża dyspersję sygnałów. W obecności wielokrotnych komponentów harmonicznych
danej częstotliwości generuje się duże odchylenie od wartości średniej, co zmienia
współczynnik kształtu;
- współczynnik szczytu C:
rmsx
xC max (2.30)
Obrazuje związek między wartością szczytową a poziomem globalnym całego pomiaru.
Wzrasta, kiedy jest pulsacja od bicia komponentów obrotowych;
- współczynnik impulsowości I:
avex
xI max (2.31)
Ustala związek między wartością średnią i wartością szczytową sygnału.
- współczynnik luzu hf:
p
maxf
x
xh (2.32)

gdzie w powyższym wzorze:
2N
1i
i
pN
x
x
(2.33)
Wzrastanie wartości współczynnika luzu wykazuje akumulację energii lub występuje,
kiedy zmienia się dyspersja danych.
Powyższe funkcje opisujące sygnał drganiowy przedstawiono schematycznie na rysunku
2.19. Jeżeli powyższe funkcje po uśrednieniu dla danej chwili czasu t będą liczbami. Jeżeli te
same funkcje mierzone będą dla różnych czasów życia obiektu, to przedstawiać będą zmiany
zachodzące w danym obiekcie dzięki którym możliwym do wyznaczenia staje się trend zmian
danej wielkości.
Rys 2.19. Estymatory amplitudowe sygnału drganiowego
Dla maszyn o prostej strukturze kinematycznej estymator liczbowy jakim jest miara
amplitudy drgań jest dobrą wielkością diagnostyczną. Na podstawie pomiaru jedynie
amplitudy prędkości drgań nie jesteśmy w stanie dokonać diagnozy szczegółowej badanego
obiektu (wskazać element maszyny wymagający naprawy). Takie informacje zawarte są w
rozkładzie częstościowym sygnałów wibroakustycznych, a więc w widmach sygnału, których
wartość wyznacza się zgodnie z równaniem 2.22.
Diagnozowanie na podstawie zmian widma w procesie eksploatacji jest bardzo
powszechne. Badając okresowo amplitudę prędkości drgań w wybranych punktach maszyny
oraz analizując każdorazowo skład widma sygnału drganiowego można ustalić stan
eksploatacyjny zarówno całej maszyny jak i wybranych jej elementów dzięki
przyporządkowaniu poszczególnych prążków widmowych odpowiednim elementom i
mechanizmom. Przykładowe widmo sygnału przedstawiono na rysunku 2.20.
Rys 2.20. Widmo sygnału drganiowego
0 10 20 30 40 50 60 700
0.1
0.2
0.3
0.4
0.5
Spectrum Output System
Frequency [Hz]
Ampl
itude
Na podstawie tych informacji można szczegółowo zaplanować prace konserwacyjne jak i
regeneracje wybranych elementów maszyn bez nagłego wyłączania z procesu produkcyjnego
i demontażu maszyny, co skutkuje wymiernym efektem ekonomicznym dla zakładu.
Innymi statystycznymi estymatorami sygnału drganiowego są:
- miara asymetrii s:
3
N
1i
3avei
)1N(
)xx(s
(2.34)
Miara asymetrii informacji przybliżonej do wartości średniej. Wzrasta, kiedy jest pulsacja
od bicia komponentów obrotowych;
- wariancja σx2:
T
0
2
aveT
2x dtx)t(x
T
1lim (2.35)
W niektórych przypadkach wygodnie jest rozpatrywać sygnał diagnostyczny w postaci
sumy składowej statycznej, tzn. niezależnej od czasu i składowej dynamicznej lub
fluktuacyjnej. Składowa statyczna to wartość średnia sygnału, natomiast składowa
dynamiczna to wariancja równa średniemu kwadratowi odchyleniu jego wartości od wartości
średniej. Wartość bezwzględną pierwiastka kwadratowego z wariancji nazywamy
odchyleniem standardowym;
- odchylenie standardowe σ:
N
1x
2
avex)t(x1N
1 (2.36)
Pierwsza miara dyspersji informacji wokół wartości średniej. Im mniejsza wartość
odchylenia tym obserwacje są bardziej skupione wokół średniej.
Do innych estymatorów sygnału drganiowego, stosowanych w procesach
diagnostycznych zaliczymy następujące funkcje:
- funkcja autokorelacji sygnału Rxx:
T
0T
xx dt)t(x)t(xT
1lim)(R (2.37)
To miara wyznaczająca podobieństwa procesu drganiowego sygnału w jednym punkcie
pomiarowym dla dwu różnych czasów jego trwania. W zastosowaniach praktycznych czas
obserwacji T dobiera się dostatecznie duży, aby własność estymatora była niezależna od
czasu uśredniania T. Dzięki transformacie Fouriera korelacja sygnału jest związana z
gęstością widmową mocy sygnału, jednakże pomimo swojego podobieństwa dziedzina ich
określania jest inna.
W aspekcie badań diagnostycznych funkcja korelacji daje możliwość wykrycia zmiany
stosunku mocy sygnału zdeterminowanego do wartości szumu zakłócającego. Jest zatem
miarą funkcyjną uporządkowania chwilowych wartości badanego procesu;
- funkcja korelacji wzajemnej sygnału Rxy:
T
0T
xy dt)t(y)t(xT
1lim)(R (2.38)
Jedną z podstawowych metod działania w diagnostyce wibroakustycznej obiektów jest
porównywanie dwóch stanów - badanego i wzorcowego. Można to robić badając oddzielnie
estymatory dwóch sygnałów opisujących te stany lub tworząc miary łączne tych sygnałów.

Jedną z takich miar łącznych jest funkcja korelacji wzajemnej, opisująca zależność wartości
sygnału x(t) w chwili t od wartości drugiego sygnału y(t) w chwili t + . W zastosowaniach
diagnostycznych bywa wykorzystywana do pomiaru czasu opóźnienia, wyznaczania toru
sygnału czy wykrywania sygnałów w szumie i ich odtwarzanie;
- wzajemna gęstość widmowa Gxy(f):
de)(R)f(G ft2jxyxy (2.39)
Wyznaczanie funkcji wzajemnej gęstości widmowej mocy stosuje się w wielu
praktycznych zadaniach. Jednym z nich jest pomiar transmitancji, podstawowej
charakterystyki badanych układów fizycznych. Innym przykładem wykorzystania tej miary
jest problem liniowej predykcji i filtracji;
- funkcja koherencji zwyczajnej γ2
xy(f):
)f(G)f(G
)f(G)f(
yyxx
2
xy2xy (2.40)
Miara ta jest „pochodną" gęstości widmowych mocy sygnałów x(t) i y(t). Jest lokalną
miarą podobieństwa sygnałów pochodzących z różnych źródeł drgań. W praktycznych
działaniach, mierzona w różnych czasach życia obiektu, wykrywa pojawienie się uszkodzenia
oraz zmiany transmitancji. Funkcja, która spośród dwóch punktów wyznacza ten, który
dostarcza większą ilość informacji o stanie technicznym obiektu. Przykładowy przebieg
funkcji przedstawiono na rysunku 2.21.
Rys 2.21. Funkcja koherencji sygnału
- częstotliwość Rice’a Fu:
2
1
uu
2uu
u
df)f(G
dff)f(G
2
1F
(2.41)
Podaje wartość częstotliwość, która jest najbardziej reprezentatywna w widmie.
Szczególne znaczenie częstotliwość Rice’a znajduje w diagnostyce maszyn obrotowych, w
których jedną z przyczyn drgań może być niewyważenie wirnika. Jeżeli stan maszyny ulega
zmianie to częstotliwość Rice’a również ulega zmianie, którą można uzyskać wprost z
pomiaru wartości skutecznych prędkości i przemieszczenia.
0 10 20 30 40 50 60 70 80 90 1000
0.1
0.2
0.3
0.4
0.5
0.6
Coherence
Frequency [Hz]
Am
plit
ude

- bispectrum B(f1,f2):
21
)fjf2(2121 dde),(C)f,f(B 2211 (2.42)
Miara, która jest wrażliwa na zmiany poziomu amplitudy procesów drganiowych
spowodowanych przesunięciem kątowym dwóch sygnałów o różnej częstotliwości. Jest to
widmo dwuwymiarowe z dwiema niezależnymi częstotliwościami f1, f2 i ma ono bardzo
istotne cechy diagnostyczne. Po pierwsze likwiduje wszystkie zakłócenia dodatkowe typu
szumu gaussowskiego, gdyż dla procesu normalnego jest ono z definicji zerowe. Po drugie
jest szczególnie czułe na występowanie częstotliwości harmonicznych w badanym procesie
jak i zawartości sygnałów modulowanych. Po trzecie bispectrum jest czułe na zmiany fazy
poszczególnych składowych.
Aby w badaniach diagnostycznych uniezależnić się od amplitudy sygnału wprowadzono
normalizacje bispectrum, otrzymując tzw. bikoherencję;
- bikoherencja b2 (f1,f2):
)ff(G)f(G)f(G
)f,f(B)f,f(b
21uu2uu1uu
2121
2
(2.43)
W zastosowaniach diagnostycznych np. dla silników spalinowych mierząc bikoherencję
możemy określić stopień odchylenia od równomiernego biegu w myśl zasady, iż maksimum
bikoherencję odpowiada sygnałowi maksymalnie okresowemu. Podobne zastosowanie
funkcja ta znajduje dla innych maszyn o ruchu okresowym;
- kurtoza βkurt:
4
RMS
N
1i
41
kurtx
)ss(N
1
(2.44)
Kurtoza rozkładu prawdopodobieństwa jest miarą która wskazuje, gdzie występuje
koncentracja danych rozkładu z odniesieniem do rozkładu normalnego;
- wavelet C(τ,s):
dt)t()t(f)s,(C s,* (2.45)
Miara pozwalająca obserwować procesy drganiowe równocześnie w dziedzinie
częstotliwościowej i czasowej. Przydatna jest do analizy procesów niestacjonarnych obiektów
technicznych.
Ψt,s - reprezentacja funkcji falkowej.
Przedstawione wybrane estymatory sygnału drganiowego można zastosować do badań
diagnostycznych tego samego obiektu technicznego w różnych czasach jego życia. Pozwala
to prześledzić jego stan techniczny na przestrzeni czasu jego eksploatacji, planować z
odpowiednim wyprzedzeniem moment jego przeglądów technicznych oraz czas wyłączenia z
eksploatacji. Dzięki zastosowanym badaniom diagnostycznym minimalizujemy koszty jego
eksploatacji oraz mamy wgląd w aktualny stan techniczny wybranych elementów i
podzespołów maszyn. Obecnie istnieje wiele dostępnych programów komputerowych z
obszaru akwizycji i przetwarzania sygnałów, w których symptomy własne i wzajemne
procesów drganiowych są pozyskiwane i szeroko wykorzystywane.

2.6. SELEKCJA MIAR PROCESU DRGANIOWEGO
Ocena stanu dynamicznego maszyn za pomocą miar i ocen sygnałów diagnostycznych
zależy od zawartości informacyjnej odbieranych sygnałów (rys.2.22). Przy wyborze sygnału
mającego stanowią o danej własności maszyny niezwykle istotne jest właściwe odtworzenie
modelu informacyjnego, umożliwiającego opis rozwijających się uszkodzeń.
Opis sygnału dokonywany jest za pomocą zbioru jego cech (ocen), którymi mogą być
liczby lub funkcje. Działanie, w wyniku którego otrzymuje się zbiór cech sygnału, nazywane
jest analizą sygnału. Wybór metod analizy oraz wybór cech sygnału w tej analizie dokonany
powinien być odpowiednio do celu badań oraz odpowiednio do klasy sygnału, czyli z
uwzględnieniem ogólnych właściwości rozpatrywanego zadania diagnostycznego. Wybór
procedury przetwarzania sygnału od rodzaju żądanych informacji, od klasy analizowanego
sygnału i od technicznych możliwości realizacji.
Sygnał zdeterminowany można jednoznacznie opisać za pomocą zależności
matematycznych, nie zawierających wielkości losowych. Można więc dokonać jego opisu za
pomocą funkcji (czasu, częstotliwości, położenia) o wartościach rzeczywistych lub
zespolonych. Większość sygnałów ma charakter losowy, ze względu na kilka czynników, z
których najważniejsze to: obecność zakłóceń wnoszonych przez aparaturę, losowość
obserwowanych zjawisk dynamicznych maszyny, losowość zakłóceń zewnętrznych itd.
Sygnałowi losowemu, w celu jego opisu, należy przyporządkować proces stochastyczny.
Sygnały losowe określane są na zbiorze realizacji w ograniczonym przedziale czasu.
Zmierzony sygnał losowy można uważać za odcinek jednej realizacji procesu losowego, a
wartości cech sygnału losowego powinny być wyznaczane na podstawie analizy wszystkich
jego realizacji. Z tego powodu wprowadzono pojęcie estymatora, tj. oceny wartości cechy
zmiennej losowej, dokonanej na podstawie analizy próby o ograniczonej licznością wartości
tej zmiennej.
Rys.2.22. Przebieg czasowy sygnału drganiowego rejestrowanego czujnikiem drgań
Estymator powinien w szczególności być nieobciążony i zgodny [25,30]:
nieobciążony, gdy jego wartość oczekiwana jest równa wartości ocenianej cechy,
zgodny, jeśli ze wzrostem liczności próby, wartość estymatora dąży do wartości
ocenianej cechy (z prawdopodobieństwem dążącym do jedności).
Teoria przetwarzania sygnałów obejmuje działania zmierzające do wybrania ze
zmierzonego sygnału istotnych informacji o przebiegu badanego zjawiska. Przetwarzanie
sygnałów można podzielić na etapy [18,25]:

przetwarzanie wstępne: filtrowanie sygnału analogowego, przetwarzanie analogowo –
cyfrowe, usuwanie trendu, klasyfikacja sygnału, testy: stacjonarności, okresowości,
analiza zasadnicza w dziedzinie czasu, częstotliwości i amplitud,
cechowanie otrzymanego estymatora poprzez obliczenie błędu średniokwadratowego,
względnego odchylenia standardowego i względnego odchylenia skutecznego.
Złożoność operacji koniecznych do przeprowadzenia pomiarów jest wykonalna jedynie
pod warunkiem użycia metody pomiarów elektrycznych. Zatem, każdą mierzoną wielkość
mechaniczną przekształca się za pomocą odpowiednich przetworników w sygnał elektryczny,
który dalej jest dopiero wzmacniany, przetwarzany i poddawany analizie. Funkcje pomiarowo
– analizujące mogą spełniać przyrządy o różnej konstrukcji i zasadzie działania (analogowej,
cyfrowej, hybrydowej), przy czym dynamika rynku tych przyrządów jest tak duża, że mija się
z celem opisywanie poszczególnych typów i zasady ich działania.
Wykorzystanie danych, zbieranych w nadmiarze w eksperymencie i uzyskiwanych
podczas przetwarzania, do podjęcia decyzji o stanie maszyny często nie jest ani możliwe ani
konieczne. Naturalne jest więc dążenie do redukcji danych początkowych, obejmujących
zbiory obiektów oraz opisujących je informacji, które winny zostaną zastąpione przez
stosunkowo niewielkie zbiory danych odpowiednio zagregowanych i uporządkowanych.
Redukcja danych może polegać na:
selekcji informacji, czyli redukcji liczby cech opisujących obiekty,
zastąpieniu ciągłego zakresu zmienności wartości cechy zmianami dyskretnymi, albo
niekiedy binarnymi,
zmniejszeniu liczby obiektów reprezentujących poszczególne klasy stanu.
Spodziewanym efektem redukcji danych dla przyjętej jakości klasyfikacji stanu jest
uproszczenie struktury zbioru danych, uproszczenie algorytmu klasyfikacji, skrócenie czasu
obliczeń, zwiększenie szybkości pracy systemu, zmniejszenie kosztów realizacji technicznej.
Redukcja nadmiaru informacji
Wykorzystanie danych, zbieranych w nadmiarze w eksperymencie i uzyskiwanych
podczas przetwarzania, do podjęcia decyzji o stanie maszyny często nie jest ani możliwe ani
konieczne. Najogólniej redukcja danych może polegać na:
- selekcji informacji, czyli redukcji liczby cech opisujących obiekty;
- zastąpieniu zakresu zmienności wartości cechy zmianami dyskretnymi lub binarnymi;
- zmniejszeniu liczby obiektów reprezentujących poszczególne klasy stanu.
Selekcja miar diagnostycznych prowadzona jest przy wykorzystaniu dostępnych
pakietów statystycznych i specjalizowanego oprogramowania badawczego, które pokrótce
scharakteryzowano poniżej lub szerzej w różnych miejscach tej książki.
MICROSOFT EXCEL
Arkusz kalkulacyjny Microsoft Excel umożliwia wprowadzanie i przechowywanie
danych liczbowych oraz tekstowych. Pozwala na automatyzację obliczeń, porządkowanie
danych poprzez sortowanie, filtrowanie, podsumowywanie oraz umożliwia prezentowanie
danych liczbowych w formie wykresów. Przy wykorzystaniu arkusza kalkulacyjnego Excel
można prowadzić różne formy ewidencji, tworzyć kosztorysy oraz kalkulacje. Wprowadzane
dane mogą być zapisywane i poddawane dalszej obróbce statystycznej. Program zawiera dużą
liczbę funkcji matematycznych, statystycznych, finansowych oraz bazodanowych [1,14].
STATISTICA
Program STATISTICA należy do rodziny programów wspomagających analizy
danych różnego rodzaju. Można go wykorzystać do obliczania podstawowych charakterystyk
i wizualizacji danych, przy zastosowaniu modelowania klasycznymi metodami
statystycznymi, oraz po wykorzystanie najnowszych technik optymalizujących pracę z bardzo
dużymi zbiorami danych (sieci neuronowe, data mining). Narzędzia dostępne w programie

dodatkowo umożliwiają automatyzację wykonywanych analiz, zapisywanie wykonywanych
czynności oraz przeprowadzanie analiz danych przez Internet. Algorytmy obliczeniowe
programu zapewniają bardzo dużą dokładność, co umożliwia wykonywanie obliczeń dla
danych o małej wariancji względnej oraz przeprowadzanie testów o wysokich wymaganiach
w zakresie dokładności liczbowej. Program umożliwia wyminę oraz rozpowszechnianie
informacji za pomocą Internetu [5,11,17].
MATLAB
Jest to program komputerowy będący interaktywnym środowiskiem do wykonywania
obliczeń naukowych i inżynierskich oraz do tworzenia symulacji komputerowych. W skład
pakietu wchodzą następujące elementy:
interpreter języka programowania wraz z bibliotekami podstawowych działań i
obliczeń na macierzach;
standardowe biblioteki procedur napisanych w języku MATLAB- zalicza się do nich
procedury pozwalające na obliczanie funkcji elementarnych i specjalnych, całkowanie
numeryczne, podstawowe obliczenia statystyczne, rozwiązywanie układów równań
różniczkowych zwyczajnych, przekształcanie macierzy;
biblioteki dodatkowe, są dobierane do potrzeb użytkownika, zawierają one procedury
wspomagające obliczenia numeryczne wykonywane w różnych zastosowaniach;
nakładki są to dodatkowe programy, które wspomagają obliczenia określonego
rodzaju, przykładem takiego programu może być np. Simulink.
OPTIMUM
Moduł optimum wykorzystuje metodę punktu idealnego, która pozwala na
wyszczególnienie miar o największym wskaźniku informacyjności. Metoda ta wchodzi w
skład metod optymalizacji wielokryterialnej. Moduł OPTIMUM umożliwia segregowanie
rozpatrywanych rozwiązań na podstawie ustalenia najmniejszej odległości od rozwiązania
idealnego i największej od rozwiązania niekorzystnego (rys.2.23). Stosując metodę punktu
idealnego należy podać dane określające poszczególne kryteria. Metoda ma charakter
wieloetapowy, co pozwala na stosowanie jej do porządkowania i podziału zbiorów tego
samego typu wariantów.
Rys.2.23. Selekcja symptomów stanu w metodzie OPTIMUM
SVD (Singular Value Decomposition)
Metoda SVD jest to określony rozkład macierzy według wartości szczególnych na
iloczyn trzech specyficznych macierzy. Metoda jest stosowana w analizie statystycznej w celu
rozpoznania rozwijającego się uszkodzenia, selekcji symptomów diagnostycznych, oceny
udziału symptomów w rozpoznaniu uszkodzenia oraz redukcji wymiaru macierzy. Można ją
stosować przy przetwarzaniu obrazów i sygnałów.
Rys.2.24. Selekcja informacji w metodzie SVD
SIBI (System Informatyczny Badań Identyfikacyjnych) Program pozwala szybką identyfikację uszkodzenia oraz badanie wpływu różnych
zakłóceń mających wpływ na pracę obiektu na trafność diagnozy. Możliwa jest rejestracja i
przetwarzanie procesów drganiowych, wnioskowanie statystyczne, wizualizacja wyników
analizy oraz prognozowanie czynności obsługowych. Program zawiera w swojej bazie
moduły, które wspomagają proces badania. Wyróżnić można: moduł Symthoms, moduł
Optimum, moduł SVD, moduł Optymization, moduł Read UNV, moduł MAC oraz moduł
Input/Output.
Możliwość szybkiej identyfikacji uszkodzenia w diagnozowaniu stanu maszyn, przy
wspomaganiu technikami informatycznymi, stała się podstawą opracowanego w zespole
autora systemu oprogramowania SIBI (System Informatyczny Badań Identyfikacyjnych).
Program ten aktualnie jest wykorzystywany dla potrzeb:
- akwizycji sygnałów diagnostycznych,
- przetwarzania sygnałów w symptomy stanu,
- badania wrażliwości symptomów (pojedynczo, wielowymiarowo),
- modelowania i wnioskowania statystycznego,
- wizualizacji wyników analizy.
Metodyka postępowania podczas przetwarzania informacji w całym zadaniu
diagnostycznym, od sformułowania zadania - do końcowej procedury badań, pokazana
została na rys.2.25. W zakresie redukcji informacji istotne są wyróżnione bloki wyboru cech
stanu obiektu oraz wyboru miar sygnału diagnostycznego, decydujące o rodzaju i dobroci
modelu diagnostycznego, w oparciu o który formułowane są diagnozy o stanie obiektu. Z
blokiem selekcji miar sygnału związany jest blok wyboru punktów odbioru sygnału
diagnostycznego, często znaczący w doborze symptomów stanu, szczególnie w diagnostyce
drganiowej maszyn. Przykładowo dalej pokazano jedną z możliwości przetwarzania
informacji diagnostycznej wraz z redukcją nadmiaru informacji w zakresie:
- wyboru punktów odbioru sygnału;
- wyboru symptomów stanu;
- wyboru cech stanu obiektu.

Rys.2.25. Algorytm postępowania podczas przetwarzania danych diagnostycznych
2.7. IDENTYFIKACJA PROSTA
Zmiany stanu (destrukcja elementów maszynowych) opisywane sygnałem
drganiowym odzwierciedlają się w zmiennych wartościach poziomu (parametrów) drgań, lub
w zmianie transmitancji od punktu uszkodzenia do punktu odbioru.
W większości zastosowań oceny zmian dynamicznych obiektu korzysta się z
identyfikacji prostej, gdzie wyznacza się zmiany wartości masy - m, sztywności - k,
tłumienia - c, albo zmiany parametrów charakterystyk amplitudowo – częstotliwościowych
(widma). Do zadań identyfikacji prostej należy:
- wyznaczanie struktury modelu, czyli wartości i wzajemnych połączeń między elementami
masowymi (m), sprężystymi (k) i dyssypacyjnymi (c);
- wyznaczanie charakterystyk amplitudowo – częstotliwościowych układów lub tylko
pewnego zbioru ich parametrów.
W zakresie częstotliwości niskich obiekty można modelować układami dyskretnymi o kilku
stopniach swobody, a często o jednym stopniu swobody – rys.2.26. Układ dyskretny w
odróżnieniu od ciągłego cechuje się punktowym rozkładem mas, sztywności tłumienia i
wymiary tych elementów nie odgrywają roli. Dla układów mających więzy sprężyste
ustalające ich położenie w przestrzeni, przyjmuje się zwykle liczbę stopni swobody równą
liczbie mas w układzie.
Cechy stanu BAZA WIEDZY:
obiektu - eksploatacyjnej
- diagnostycznej
- ekonomicznej
OBIEKTY BADAŃ
ZADANIE
DIAGNOSTYCZNE
Modele generacji sygnałów diagnostycznych
Metodyka badań
diagnostycznych
Wybór punktów Wybór cech stanu
pomiarowych obiektu badań
Wybór miar sygnału diagnostycznego
Model obiektu
diagnozy
(jego kolejne przybliżenia )
DIAGNOZA Stany graniczne
Opracowanie
małe Prawdopodobieństwo wystarczające procedury
trafnej diagnozy diagnozowania
DO ZASTOSOWAŃ

Badania transmitancji układów o jednym stopniu swobody może polepszyć
zrozumienie procesów drganiowych zachodzących w maszynach, a także zrozumienie zmian
zachodzących w tych procesach z tytułu zmian wartości parametrów m, k, c.
Rys.2.26. Układ o jednym stopniu swobody jako najprostszy model obiektu mechanicznego
Opis drgań układu o jednym stopniu swobody przedstawiają równania:
)(...
tFcxxbxm (2.46)
)sin( tAx
)cos( tAdt
dxv )sin(2
2
2 tA
dt
dV
dt
xda
Wartość modułu transmitancji )(H wyznacza się z ilorazu amplitudy odpowiedzi na
wymuszenie harmoniczne do amplitudy tego wymuszenia. Faza transmitancji jest po prostu
opóźnieniem fazowym między wymuszeniem a odpowiedzią. Transmitancja własna siła –
przemieszczenie dla układu z rys.2.26 jest następująca:
2222
0
0
)2()(
1)(
rr
xF
mF
xH
22
2tg
r
r (2.47)
Zatem postać transmitancji układu o jednym stopniu swobody określają całkowicie dwa
parametry: częstotliwość rezonansowa 2/m
kf r i stopień tłumienia
krc
c . Obydwa te
parametry są łatwo mierzalne: pierwszy z położenia piku rezonansowego rf na wymiarowej
osi częstotliwości, zaś drugi z wysokości piku rezonansowego, gdyż:
k
fHHrffr
2
1)(
stąd
200
st
rr
xHFx (2.48)
gdzie: k
Fxst
0 oznacza statyczne ugięcie sprężyny k pod działaniem siły F0.
Zmiana piku rezonansowego może być spowodowana tylko zmianą sztywności lub
masy w układzie, zaś zmiana wartości amplitudy rezonansowej drgań może wynikać ze
zmiany siły F0, sztywności k, lub stopnia tłumienia . Tak więc mierząc położenie
częstotliwości rezonansowej fr i wartość x0r można orzekać o zmianie albo stacjonarności
transmitancji układu, a tym samym o zachowaniu się parametrów fizycznych m, k, c samego
modelu obiektu.

Podobne podejście można zastosować dla układów wielorezonansowych (realnych
obiektów technicznych) pod warunkiem, że rezonanse te są dostatecznie od siebie oddalone
rfF 2 . Układ taki można wtedy traktować jako słabo sprzężony zbiór układów o jednym
stopniu swobody nastrojonych na różne częstotliwości.
Badania zmian transmitancji odzwierciedlającej własności dynamiczne obiektu można
przeprowadzić trzema metodami, zgodnie z rys.2.27:
- za pomocą testu impulsowego (uderzenie młotkiem);
- za pomocą testu harmonicznego (sygnał z generatora);
- za pomocą testu przypadkowego (pobudzanie wielu rezonansów jednocześnie).
Rys.2.27. Schemat układu pomiarowego do identyfikacji własności dynamicznych metodą
testu impulsowego, harmonicznego i przypadkowego [16]
Test harmoniczny
Sygnał harmoniczny z generatora, po wzmocnieniu zasila wzbudnik elektrodynamiczny.
Wymuszenie może być charakteryzowane za pomocą przetwornika siły, natomiast odpowiedź
za pomocą przetwornika przyspieszeń lub prędkości drgań. Główną zaletą wymuszenia
{testu) harmonicznego jest możliwość precyzyjnej kontroli i sterowania siłą wejścia. Jest to
bardzo ważne w badaniu zachowań nieliniowych, można bowiem dokonać pomiaru
odpowiedzi częstotliwościowej dla różnych poziomów siły wymuszającej. Metoda testu
harmonicznego umożliwia uzyskanie dużego stosunku sygnału do szumu poprzez filtrowanie
sygnału wyjściowego filtrem pasmowym o częstotliwości wymuszenia. Główną wadą testu
harmonicznego jest długi czas trwania badań oraz dobór dostatecznie niskiego poziomu
wymuszeń dla częstotliwości drgań własnych układu. Atutem metody jest możliwość doboru
prędkości przestrajania częstotliwości sygnału siły wymuszającej w związku z dużą
bezwładnością dynamiczną struktur mechanicznych [33,71].
Test przypadkowy
Sygnał wzbudzenia przypadkowego cechuje się rozkładem normalnym, nie jest więc
procesem okresowym. Oznacza to, że zarówno wymuszenie jak też odpowiedź testowanego
układu nie są procesami okresowymi o całkowitej liczbie w realizacji czasowej,
przetwarzanej przez analizator cyfrowy. Wymaga to stosowania funkcji ważących, np. okno
(2.49)
Inną wadą testu przypadkowego jest to, iż mimo doprowadzenia do wzbudnika sygnału o
płaskim widmie, testowana struktura jest wzbudzana siłą o innym składzie widmowym,
wynikającym z określonych własności dynamicznych połączenia wzbudnika z układem. W
teście przypadkowym każda jego realizacja jest inna. Oznacza to, że w wyniku uśredniania
Przetwornik drgań
częstotliwość
amplituda
z
t. harmoniczny
t. impulsowy
t. przypadkowy
Wzmacniacz
mocy
Wzbudnik
Drgań
Badany
obiekt
Przetwornik siły
Filtr
Przedwzmacniacz Analizator
drgań
Rejestrator
Miernik
wartości
skutecznej
siły
A

zbioru uzyskanych wyników możliwe jest wyeliminowanie efektów nieliniowości, szumów i
zakłóceń pomiarowych. Dzięki temu test przypadkowy umożliwia najlepszą liniową
aproksymację układów nieliniowych.
Przedstawione podejścia i uzyskane zależności obrazują ruch drgający obiektu
(modelu) i wynikające z niego parametry procesu drganiowego, co pozwala na zaniechanie
trudnego opisu analitycznego (szczególnie dla wielu stopni swobody) i zastąpienie go
bezpośrednimi pomiarami drgań. Stan obiektu można więc opisywać zamiennie, zamiast
modelowania w kategoriach (m,k,c) stosować opis drganiowy w kategoriach (a,v,x).
Test impulsowy
Zastosowanie impulsu jako sygnału wymuszającego w badaniach własności
dynamicznych układów mechanicznych stało się możliwe po wprowadzeniu analizatorów
cyfrowych. Impuls może być aproksymowany poprzez funkcję delta Diraca, która zawiera
energię we wszystkich częstotliwościach. Przy stosowaniu testu impulsowego należy
uwzględnić dwie bardzo ważne charakterystyki układu badanego: liniowość i tłumienia.
Wysoki stosunek wartości szczytowej do wartości skutecznej przy wymuszeniu
impulsowym, powoduje wymuszenia nieliniowości układu. Oznacza to, że test ten nie może
być stosowany do układów silnie nieliniowych. Wielkość tłumienia ma także istotny wpływ
na wyniki testu. Istotnym jest także wybór młotka do pobudzania testowanego układu. Od
rodzaju młotka (masa, twardość powierzchni) zależy kształt wyzwalanego impulsu (zakres
wymuszanych częstotliwości).
Uzyskiwane z pomiarów widmo drgań określa częstotliwość rezonansową (pierwszy
max. pik) oraz wartość amplitudy w tej częstotliwości, co dla różnych stanów obiektu
pozwala na wnioskowanie o zmianach m, k, c.
Przedstawione podejścia i uzyskane zależności obrazują ruch drgający obiektu
(modelu) i wynikające z niego parametry procesu drganiowego, co pozwala na zaniechanie
trudnego opisu analitycznego (szczególnie dla wielu stopni swobody) i zastąpienie go
bezpośrednimi pomiarami drgań. Stan destrukcji obiektu można więc, opisywać zamiennie,
zamiast modelowania w kategoriach (m,k,c) stosować opis drganiowy w kategoriach (a,v,x).
2.8. ANALIZA MODALNA
Analizę własności dynamicznych maszyny prowadzi się poprzez analizę zachowań
dynamicznych modelu tej maszyny. Proces budowy modelu może być realizowany poprzez
analityczny opis wielkości dynamicznych układu, albo też metodą eksperymentu modalnego -
prowadzonego na obiekcie rzeczywistym.
Dla układów złożonych (często nieliniowych) używa się dla potrzeb identyfikacji
metod złożonej analizy modalnej (teoretycznej, eksperymentalnej lub eksploatacyjnej). W
wyniku przeprowadzenia analizy modalnej otrzymuje się model modalny, który stanowi
uporządkowany zbiór częstości własnych, odpowiadających im współczynników tłumienia
oraz postaci drgań własnych. Na podstawie znajomości modelu modalnego można
przewidzieć reakcje obiektu na dowolne zaburzenie, zarówno w dziedzinie czasu, jak i
częstotliwości.
Analiza modalna jest powszechnie stosowaną w praktyce techniką badania własności
dynamicznych obiektów mechanicznych. Jest ona stosowana dla celów modyfikacji maszyny,
diagnostyki jej stanu, dla celów syntezy sterowania w układach aktywnej redukcji drgań oraz
dla celów weryfikacji i walidacji modeli numerycznych, takich jak: modele elementów
skończonych czy elementów brzegowych [69,71].
Analiza modalna może być stosowana, jeżeli spełnione są następujące założenia [71]:

- układ jest liniowy i jego dynamika może być opisana za pomocą liniowego układu
równań różniczkowych zwyczajnych lub cząstkowych;
- współczynniki równań opisujących dynamikę obiektu są stałe w czasie pomiarów;
- układ jest obserwowalny i istnieje możliwość pomiaru wszystkich charakterystyk,
których znajomość jest niezbędna do identyfikacji modelu;
- badany układ spełnia zasadę wzajemności Maxwella;
- tłumienie w układzie jest małe lub proporcjonalne.
Ważnym ograniczeniem stosowania analizy modalnej jest też założenie o ograniczonej
liczbie stopni swobody badanego układu, z czym wiąże się wymiar macierzy mas, sztywności
i tłumienia oraz liczba teoretycznych częstości własnych i postaci drgań.
Mimo tak silnych założeń co do zakresu stosowalności analizy modalnej jest ona
używana coraz częściej do rozwiązywania wielu problemów, a nabywane doświadczenia
badawcze wskazują na nowe możliwości jej aplikacji.
W większości praktycznych zastosowań analizy modalnej wymagany jest
wielokanałowy eksperyment oraz złożone obliczenia związane z przetwarzaniem
zmierzonych sygnałów oraz estymacją parametrów modelu. Pomimo tak silnych założeń co
do stosowalności metody oraz złożoności wymaganego eksperymentu jest to w chwili obecnej
metoda, bez której nie powstaje żadna konstrukcja, dla której istotne są odpowiednio
ukształtowane własności dynamiczne. Pierwsze zastosowania metody analizy modalnej
udokumentowano już z końcem lat 40-tych, a gwałtowny ich rozwój nastąpił w latach 80-
tych, ze względu na rozwój technik komputerowych [71].
Coraz częściej metodę tą stosuje się dla celów diagnostyki maszyn, wykorzystując
oparte na modelu podejście do diagnozowania obiektów mechanicznych, dla którego
charakterystyczne jest śledzenie zmian parametrów modeli wraz ze zmianami stanu badanego
obiektu. Dzięki modelowemu podejściu do obiektu mechanicznego możliwe staje się
przewidywanie rozwijających się uszkodzeń, a tym samym wcześniejsze im przeciwdziałanie.
W klasycznym sformułowaniu metoda analizy modalnej wymaga sterowanego
eksperymentu, w którym wymusza się ruch obiektu za pomocą sił (lub kinematycznie) oraz
mierzy odpowiedź układu w sieci punktów pomiarowych rozłożonych na badanym obiekcie.
Na podstawie zmierzonych sygnałów wymuszających ruch oraz odpowiedzi układu wyznacza
się model funkcjonalny w postaci charakterystyk czasowych lub częstotliwościowych i na ich
podstawie dokonuje estymacji parametrów modelu modalnego. Jednak, ze względu na
konieczność pomiaru wymuszenia, dla celów diagnostycznych metoda analizy modalnej w
klasycznym sformułowaniu ma ograniczone zastosowanie.
O wiele bardziej przydatna jest metoda oparta o pomiar tylko odpowiedzi układu na
wymuszenia eksploatacyjne, które są wynikiem oddziaływania maszyny z otoczeniem,
uszkodzeń maszyny lub też wynikiem realizowanego procesu technologicznego. Dla wielu
konstrukcji w warunkach eksploatacji działają na układ zupełnie inne wymuszenia (co do
charakteru przebiegu czasowego, rozkładu przestrzennego i amplitudy) niż można
zrealizować w warunkach laboratoryjnych. Podobnie jest dla warunków brzegowych, które w
czasie eksperymentu zależą od możliwości zamocowania obiektu na stanowisku badawczym,
natomiast różnią się one znacznie od warunków występujących w czasie eksploatacji. W
wielu praktycznych realizacjach badań modalnych badany obiekt jest zbyt duży i ma zbyt
dużą masę, aby można było wymusić odpowiednio dużą amplitudę ruchu w warunkach
eksperymentu czynnego, przy ograniczonych jego kosztach, tj. wykorzystując standardową
aparaturę badawczą Wymienione wyże utrudnienia w klasycznej analizie modalnej mogą być
zminimalizowane poprzez zastosowanie analizy modalnej realizowanej na podstawie
pomiarów przeprowadzonych w czasie normalnej eksploatacji, czym zajmuje się
eksploatacyjna analiza modalna (ODS).
Tak widziane możliwości zastosowań pozwalają wyróżnić następujące rodzaje analizy
modalnej:
teoretyczną, która wymaga rozwiązania zagadnienia własnego dla przyjętego modelu
strukturalnego badanego obiektu,
eksperymentalną, wymagającą sterowanego eksperymentu identyfikacyjnego,
podczas którego wymusza się ruch obiektu (np. drgania) oraz dokonuje pomiaru
wymuszenia i pomiaru odpowiedzi w wielu punktach pomiarowych, rozmieszczonych
na badanym obiekcie,
eksploatacyjną, opierającą się na eksperymencie eksploatacyjnym, w którym
dokonuje się pomiarów tylko odpowiedzi układu w wielu punktach pomiarowych,
podczas gdy ruch obiektu spowodowany jest rzeczywistymi wymuszeniami
eksploatacyjnymi.
Podstawowy model modalny jest zdefiniowany, jak już wspomniano, jako zbiór
częstości własnych oraz postaci drgań własnych odpowiadających poszczególnym
częstościom własnym. Bardziej zaawansowane metody pozwalają na identyfikacje
współczynników tłumienia oraz masy i sztywności modalnej.
Wyznaczenie modelu funkcjonalnego polega na określeniu charakterystyk czasowych
odpowiedzi układu, w przypadku gdy wymuszenie jest impulsowe lub charakterystyk
częstotliwościowych, gdy wymuszenie ma charakter szerokopasmowy. Znając parametry
wymuszenia (w przypadku analizy eksperymentalnej) oraz wybrane charakterystyki, można
dokonać estymacji parametrów modelu modalnego. Polega ona na aproksymacji zmierzonych
charakterystyk maszyny za pomocą funkcji, dla której zmiennymi są parametry modelu
modalnego. Stosowana coraz częściej analiza modalna pozwala na rozwiązanie szeregu
zagadnień, m.in.[71]:
- analiza modalna jest metodą rozwiązania zagadnienia własnego dla obiektu (nie modelu);
- analiza modalna jest metodą rozprzęgania układu równań opisujących dynamikę modelu,
- analiza modalna jest metodą identyfikacji własności dynamicznych obiektu,
- analiza modalna jest metoda dyskretyzacji konstrukcji o ciągłym rozkładzie parametrów,
- analiza modalna jest metodą redukcji modelu.
Eksperymentalna analiza modalna jest jedną z najbardziej rozpowszechnionych
technik identyfikacji parametrów modalnych konstrukcji mechanicznych. W metodach
klasycznych do estymacji parametrów modeli modalnych wykorzystuje się pomiar
wymuszenia i odpowiedzi. Zasadniczy podział tych metod to podział na metody w dziedzinie
czasu i częstotliwości [68].
W dziedzinie czasu rozróżnia się metody bezpośrednie i metody pośrednie. Do metod
bezpośrednich metody oparte o modele regresyjne sygnałów typu ARX, ARMA, ARMAX i
metody DSPI. Do metod pośrednich zalicza się metody CE, LSCE, PRCE, ITD i ERA
[68,71].. W dziedzinie częstotliwości również wyróżnia się metody pośrednie i bezpośrednie.
Do najbardziej znanych zaliczyć należy metody pośrednie dla pojedynczego stopnia swobody
(metoda amplitudy rezonansowej, metoda aproksymacji okręgiem, metoda kwadratur, metoda
Kennedy-Pancu, metoda odwrotnej macierzy sztywności, metoda Dobsona, metoda CRF) i
dla wielu stopni swobody (GSH, FDPM,CEFD,RFP) GRFP,ERA-FD,SFD,ISSPA) [68,71].
Wiele z tych metod ma implementacje w oprogramowaniu do wspomagania
eksperymentalnej analizy modalnej, przy czym jest ono bardzo drogie.
W analizie eksploatacyjnej korzysta się tylko z pomiarów odpowiedzi układu.
Znajomość charakteru wymuszenia nie jest w tym przypadku istotna. Źródłem wymuszeń
może być normalna eksploatacja maszyny, gdzie na badany obiekt działają siły związane z
oddziaływaniem z otoczeniem. Metody identyfikacji oparte o pomiary eksploatacyjne można
podzielić na następujące grupy [68]:
metody realizowane na bazie korelacji własnej i wzajemnej,
metody realizowane na bazie funkcji autoregresji dla sygnałów odpowiedzi,
metody realizowane w podprzestrzeni stochastycznej,
metody realizowane w dziedzinie częstotliwości w oparciu o aproksymacje zmierzonych
charakterystyk częstościowych za pomocą modelu modalnego (Peak-Piking),
metoda dekompozycji w dziedzinie częstotliwości (FDD).
Metody oceny uszkodzenia konstrukcji z zastosowaniem analizy modalnej można
podzielić na metody: analityczne, eksperymentalne.
W metodach analitycznych wykorzystuje się zarówno wyniki symulacji modeli
elementów skończonych (MES), jak również wyniki przeprowadzonego testu modalnego.
Klasycznym przykładem takiej metody jest metoda polegająca na dostrajaniu modelu
elementów skończonych badanej konstrukcji na podstawie wyników jej badań modalnych
przeprowadzanych okresowo w czasie eksploatacji obiektu. Zmiany modelu podczas
dostrajania są wskaźnikiem zmian zachodzących w badanym obiekcie.
Typowo eksperymentalną metodą jest porównywania częstości własnych
wyznaczanych w pewnych odstępach czasu. Zmiany tych częstości mogą być symptomem
powstałego w układzie uszkodzenia. Jednak metoda taj jest w wielu praktycznych
przypadkach zbyt mało czuła na powstałe uszkodzenia. Bardziej czuła jest zmiana
zidentyfikowanych częstości układu na błędy pomiarowe i zakłócenia niż na powstające w
konstrukcji uszkodzenie. O wiele bardziej czułe na uszkodzenia konstrukcji są postacie drgań,
które można wykorzystać do wykrywania uszkodzenie konstrukcji na kilka sposobów
[52,53,68,71].
Do podstawowych sposobów oceny stanu konstrukcji należą:
• porównanie współczynników MAC i COMAC dla postaci zmierzonych w pewnych
odstępach czasu w czasie eksploatacji i wykrywanie zmian na skutek zmian stanu obiektu;
• wyznaczanie zmian energii odkształcenia na skutek powstającego uszkodzenia na podstawie
znajomości postaci drgań.
Druga z wymienionych metod polega na badaniu zmian w przebiegu postaci drgań, a
w szczególności drugich pochodnych postaci po współrzędnych, czyli zmian energii
odkształcenia związanych z dana postacią i danym uszkodzeniem konstrukcji. Wyróżnić
można tutaj również podejście czysto eksperymentalne, w którym energię odkształcenia
oblicza się na podstawie zmierzonych postaci drgań [71] oraz eksperymentalno - analityczne,
w którym konieczna jest znajomość macierzy sztywności układu [54,71].
Analiza modalna z definicji może być zastosowana dla układów spełniających
warunki liniowości. W praktyce badania układów mechanicznych, nie wszystkie układy mogą
być traktowane jako liniowe. W przypadku nieliniowości typu geometrycznego do analizy
modalnej można zastosować metody oparte o teorię układów liniowych o zmiennych w czasie
parametrach. W przypadku nieliniowości fizycznych najczęściej stosuje się podejście oparte o
tzw. siły resztkowe lub na linearyzacji w otoczeniu punktu pracy.
Sformułowanie analizy modalnej dla układów o zmiennych parametrach jest pewną
modyfikacją klasycznej analizy modalnej, która z zasady dotyczy układów o stałych
współczynnikach. Modyfikacja ta oparta jest na pojęciu zmiennej w czasie funkcji przejścia.
TEORETYCZNA ANALIZA MODALNA
Teoretyczną analizę modalną definiuje się jako problem własny macierzy, zależny od
macierzy mas, sztywności i tłumienia. Wymaga ona rozwiązania zagadnienia własnego dla
przyjętego modelu strukturalnego badanej konstrukcji. Wyznaczone tu zbiory częstości
własnych, współczynników tłumienia oraz postacie drgań własnych pozwalają na symulacje
zachowania się konstrukcji przy dowolnych wymuszeniach, doborze sterowań, modyfikacji

konstrukcji i innych. Ma ona zastosowanie w procesie projektowania, gdy nie ma możliwości
realizacji badań na obiekcie.
W praktycznym zastosowaniu jak dotąd wykorzystywano analizę modalną do oceny
konstrukcji kratowych (maszty, anteny, dźwigi), diagnozowania turbozespołu oraz oceny
jakości konstrukcji mostów. W większości tych zastosowań zmiana lokalnie sztywności
powoduje zmiany parametrów modelu modalnego. Za pomocą śledzenia zmian postaci drgań
własnych można określić obszar, w którym występuje uszkodzenie [71].
Ocenę wpływu rozwijającego się uszkodzenia na parametry modelu modalnego można
oszacować stosując teorię wrażliwości do modelu strukturalnego bez tłumienia w postaci:
0
KxxM (2.50)
gdzie: M,K – macierze mas i sztywności,
x ,x – wektor przyśpieszeń i przemieszczeń.
W celu wyznaczenia parametrów modelu modalnego należy rozwiązać zagadnienie
własne w postaci:
}0{}{}{ iii MK (2.51)
gdzie: i -wartości własne, { i }-wektory własne.
Z powyższego równania wynika, że zmiana charakterystyk mechanicznych układu pociąga za
sobą zmianę jego charakterystyk własnych, co znane jest jako zagadnienie wrażliwości [56].
Po serii przekształceń (2.51) uzyskano, dla układu bez tłumienia, w efekcie końcowym
zależność:
i
T
i
i
i
T
i
i
i
p
Mf
p
K
fp
f
2}{}{
8
12
(2.52)
gdzie: pierwszy składnik opisuje wpływ zmian sztywności, a drugi efekt zmian masy układu.
Określane zmiany częstości własnej zależą wprost proporcjonalnie od wielkości zmian
sztywności lub masy, jak też zależą od miejsca rozwoju uszkodzenia w konstrukcji.
Szczegółowe omówienie podstaw teoretycznej analizy modalnej, znanej jako problem
rozwiązania zagadnienia własnego przedstawiono w rozdziale 2.2.
EKSPERYMENTALNA ANALIZA MODALNA
Eksperymentalna analiza modalna jest często stosowaną w praktyce techniką badania
własności dynamicznych obiektów mechanicznych, zarówno na etapie konstruowania jak i w
eksploatacji maszyn. Eksperyment identyfikacyjny w eksperymentalnej analizie modalnej
(rys.2.28) polega na wymuszeniu drgań obiektu przy jednoczesnym pomiarze siły
wymuszającej i odpowiedzi układu, najczęściej w postaci widma przyspieszeń drgań.
Rys.2.28. Istota badań w eksperymentalnej analizie modalnej
Eksperymentalna analiza modalna składa się zatem z czterech podstawowych etapów:
- modelowanie;
- eksperyment;
- estymacja parametrów;
- weryfikacja modelu.
Analizator APB 200
Obiekt
badań
Młotek PCB
Czujnik ICP
Typ

Pierwszym krokiem w algorytmie postępowania w eksperymentalnej analizy modalnej
jest modelowanie [53], polegające na wskazaniu punktów konstrukcji, których zachowania
dynamiczne są istotne w odwzorowaniu zachowania się całej maszyny. Następnie należy
wyznaczyć odpowiedzi częstotliwościowe maszyny w tych punktach na zadane wymuszenie.
Jako wynik uzyskuje się opis własności dynamicznych maszyny w postaci macierzy
transmitancji widmowych Hik (j) (i, k = 1, 2,...n; i - numer punktu odpowiedzi, k - numer
punktu przyłożenia wymuszenia). Istnieje kilka metod wyznaczania częstotliwościowej
odpowiedzi układów mechanicznych w zależności od techniki wymuszenia.
Zatem, w klasycznej analizie modalnej, parametry modalne identyfikowanego obiektu
są wyznaczane na podstawie pomiaru charakterystyk częstotliwościowych zmierzonych na
obiekcie za pomocą czynnego eksperymentu identyfikacyjnego polegającego na sterowanym
wymuszeniu drgań układu i pomiarze odpowiedzi w postaci widma przyspieszenia drgań. Na
podstawie znajomości widma odpowiedzi i wymuszenia dokonuje się identyfikacji przebiegu
charakterystyk częstotliwościowych obiektu. Postępowanie to jest stosowane w metodach
realizowanych w dziedzinie częstotliwości [52]. Za pomocą tych metod można wyznaczyć
parametry modelu modalnego w otoczeniu pojedynczej częstości własnej (metody SDOF) lub
w wybranym paśmie częstotliwości zawierającym więcej jak jedną częstotliwość własną
(metody MDOF).
W odróżnieniu do tych metod, metody realizowane w dziedzinie czasu wymagają
wielokanałowego pomiaru przebiegów czasowych odpowiedzi i wymuszenia. W większości
znanych metod pierwszym krokiem procedury identyfikacji jest wyznaczenie odpowiedzi
impulsowej układu, a następnie na podstawie jej znajomości estymuje się parametry modelu
modalnego [52].
Metoda eksperymentalnej analizy modalnej opisuje własności maszyny za pomocą
macierzy charakterystyk dynamicznych. Metoda ta pozwala dokonać rozłożenia zachowania
się układu na zbiór równań ruchu (wyznaczonych w przestrzeni modalnej) lub zbiór postaci
własnych dla poszczególnych częstotliwości drgań własnych.
Estymacja parametrów w eksperymentalnej analizie modalnej polega na aproksymacji
odpowiedzi częstotliwościowej, uzyskanej z pomiarów, przez wyrażenie analityczne. Jeśli
wyrażenie analityczne jest wynikiem rozważań dotyczących odpowiedzi częstotliwościowej
modelu, wtedy parametry modalne (częstości drgań własnych, tłumienie i przemieszczenie
modalne) mogą być estymowane na bazie danych pomiarowych.
Identyfikacja modelu za pomocą eksperymentalnej analizy modalnej odbywa się w
następującej kolejności:
- wyznaczenie transmitancji,
- dopasowanie krzywych oraz wyznaczenie częstotliwości własnych i stopni tłumienia,
- wyznaczenie wektorów własnych,
- wyznaczenie macierzy bezwładności, tłumienia i sztywności.
Własności dynamiczne maszyny opisuje macierz zawierająca N2 transmitancji. Do
opisu dynamicznych zachowań maszyny wystarczy określić N funkcji przejścia. Muszą być
jednak spełnione następujące wymagania:
- konieczny pomiar co najmniej jednej auto-transmitancji,
- przy wyznaczaniu funkcji transmitancji winny być uwzględnione wszystkie punkty
dyskretyzacji. Może to polegać bądź na zastosowaniu wymuszenia w danym punkcie, bądź
przez pomiar odpowiedzi w tym punkcie.
Metody zgodności krzywych (dopasowanie krzywych) można podzielić na:
- metody bazujące na teorii układu o jednym stopniu swobody,
- metody bazujące na teorii układów o wielu stopniach swobody.
Pierwsza grupa metod ma zastosowanie dla układów o odległych częstotliwościach
własnych i małych sprzężeniach między postaciami. Oznacza to przyjęcie założenia, że w

okolicy każdej częstotliwości własnej udział składowej postaci własnej w drganiach jest
dominujący. Charakterystykę dynamiczną maszyny, w zależności od częstotliwości drgań
własnych tłumionych, współczynników tłumienia i przemieszczeń modalnych, opisuje
wyrażenie:
(2.53)
gdzie: Xi - przemieszczenie w punkcie i, Fk - wymuszenie w punkcie k; r - numer postaci
drgań; hr - współczynnik tłumienia postaci drgań o numerze r; r - częstość drgań własnych o
postaci r; Uikr + jVikr - zespolone przemieszczenie modalne.
W zagadnieniach rozwiązywanych za pomocą eksperymentalnej analizy modalnej
charakterystyki dynamiczne wyznaczane są w ograniczonym paśmie częstotliwości ( fa , fb ).
Wtedy uwzględniając wpływ postaci drgań z poza pomiarowego przedziału częstotliwości
otrzymuje się:
(2.54)
gdzie: ikm - masa efektywna wpływu postaci o częstościach niższych od dolnego zakresu pomiarowego, ikS -
sztywność efektywna wpływu postaci o częstotliwościach wyższych od górnego zakresu pomiarowego, ra, rb-
odpowiednio najniższy i najwyższy numer postaci drgań o częstotliwości z przedziału (.fa, .fb)
Uwzględnienie postaci drgań o częstotliwościach własnych niższych od dolnej granicy
zakresu pomiarowego fa i wyższych od górnej granicy zakresu pomiarowego fb polega na
przyjęciu, że poniżej i powyżej zakresu pomiarowego znajduje się jedynie po jednej postaci
własnej [30, 95].
EKSPLOATACYJNA ANALIZA MODALNA
Do identyfikacji obiektów mechanicznych o dużych rozmiarach przestrzennych i dużych
masach stosowana jest metoda eksploatacyjnej analizy modalnej (ODS), oparta o pomiar
tylko odpowiedzi na wymuszenia eksploatacyjne (rys.2.29), będące wynikiem działania sił
procesu technologicznego, bądź wymuszeń kinematycznych oraz procesu destrukcji
elementów maszyny [67,71].
Rys.2.29. Istota pomiarowa w eksploatacyjnej analizie modalnej
Eksploatacyjna analiza modalna:
- umożliwia analizę modalną obiektów o dużych rozmiarach, dla których testy laboratoryjne
byłyby utrudnione,
- modeluje poprawniej obiekty, gdyż wymuszenia odpowiadają obciążeniom rzeczywistym ze
względu na ich przebieg czasowy, rozkład przestrzenny oraz amplitudy, a także warunki
brzegowe,
- umożliwia identyfikację modeli nieliniowych.
Zaletą metod eksploatacyjnej analizy modalnej w zastosowaniu do identyfikacji
charakterystyk dynamicznych obiektów jest zachowanie warunków brzegowych oraz

wymuszeń, charakterystycznych przy eksploatacji tych obiektów. Istota eksploatacyjnej
analizy modalnej wraz z ideą systemu pomiarowego przedstawiono na rys.2.30.
Rys.6.3 Istota eksploatacyjnej analizy modalnej.
ODS jest definiowane jako odkształcenie konstrukcji dla wybranej częstotliwości
drgań lub w danej chwili czasowej przy działaniu na badany obiekt zewnętrznego
wymuszenia, przy czym analizowany musi być ruch dwóch lub więcej punktów konstrukcji.
W ten sposób może być określone odkształcenie konstrukcji podczas ruchu wymuszonego,
rozumiane jako względny ruch wybranego punktu odniesiony do pozostałych. Ze względu na
to, że ruch jest wektorem (wektor przyspieszeń, prędkości lub przemieszczeń) ma on punkt
zaczepienia, kierunek oraz wartość, które określają sposób odkształcenia konstrukcji podczas
jej ruchu. ODS w dziedzinie czasu może być wyznaczony na podstawie różnego rodzaju
odpowiedzi czasowych badanego obiektu na wymuszenie losowe, impulsowe lub
harmoniczne. Inne metody stosuje się przy wyznaczaniu ODS w dziedzinie częstotliwości, są
one w większości oparte o pomiar widma odpowiedzi układu, pomiar gęstości widmowej
mocy, charakterystyk częstotliwościowych lub też specjalnie definiowanej dla celów
wyznaczania ODS charakterystyki częstotliwościowej przejścia odniesionej do dowolnie
przyjętego punktu referencyjnego [68].
ODS zależy od wymuszenia i gdy zmieni się obciążenie konstrukcji zmieni się ODS,
natomiast wektor modalny jest niezależny od rodzaju wymuszenia i charakteryzuje własności
dynamiczne konstrukcji, a w tym warunki brzegowe, własności geometryczne i materiałowe.
Postacie drgań (wektory modalne) są wielkością bezwymiarową, natomiast ODS ma wymiar
przemieszczenia, prędkości lub przyspieszenia zależnie jakie wielkości były przyjęte w czasie
realizacji pomiaru.
Eksperymentalny sposób wyznaczania ODS polega na jednoczesnym pomiarze
parametrów drgań konstrukcji w wielu punktach. Wektor otrzymany przez wybór wartości
amplitudy przebiegu dla danej chwili czasu jest przebiegiem ODS w dziedzinie czasu.
Podobnie postępuje się przy wyznaczaniu ODS w dziedzinie częstotliwości. Dynamikę
układu w dziedzinie częstotliwości można opisać za pomocą równania:
X (j) = H(j)F(j) (2.55)
gdzie: X(j)jest wektorem widm odpowiedzi układu, F(j)jest wektorem widm sił
wymuszających, H(j)jest macierzą charakterystyk częstotliwościowych.
Wyjście
Akcelerometry przenosi się w kolejne punkty odbioru sygnałów
Stały akcelerometr
referencyjny
Wymuszenia eksploatacyjne
Równanie (2.55) jest spełnione w przypadku układu liniowego dla wszystkich
częstotliwości w rozważanym zakresie. ODS w dziedzinie częstotliwości jest zdefiniowane
jako odpowiedź układu na wymuszenie F( j) dla dowolnej częstotliwości 0:
ODS( j0) = H(j0)F(j0) (2.56)
Jak można zauważyć z zależności (2.56) ODS zależy od charakteru sił wymuszających.
ODS(t) można również wyznaczyć dokonując odwrotnej transformacji Fouriera zależności
(2.56):
ODS(t) = FFT-1
{H( j)F( j )} (2.57)
W ten sposób ODS może być wyznaczony dla tych chwil czasu, dla których obliczana jest
wartość odwrotnej transformaty Fouriera.
Doświadczalne wyznaczenie ODS w dziedzinie częstotliwości polega na
wielokanałowym pomiarze widma odpowiedzi układu oraz wyznaczeniu widm wzajemnych
pomiędzy punktami pomiarowymi, a punktami odniesienia. Ze względu na koszty pomiaru
liczba kanałów, w których dokonuje się jednoczesnego pomiaru odpowiedzi jest ograniczona.
Z tego względu na konstrukcji przyjmuje się punkty odniesienia, których położenie nie jest
zmieniane w czasie pomiarów, natomiast pozostałe punkty pomiarowe są zmieniane w czasie
realizacji eksperymentu. Takie postępowanie jest konieczne ze względu na konieczność
znajomości kąta przesunięcia fazowego pomiędzy odpowiedziami układu w punktach w
których wyznaczane jest ODS. Jeśli drgania wymuszone układu zdominowane są przez
drgania własne, to w tym przypadku wektor ODS jest podobny do wektora modalnego.
Stopień tego podobieństwa zależy od stopnia zdominowania mierzonych odpowiedzi układu
przez drgania własne.
Do identyfikacji modeli modalnych w oparciu o pomiary eksploatacyjne stosowane są
metody [53,71]:
- LSCE (Least Squares Complex Exponential), oparta na pomiarach korelacji własnej i
korelacji wzajemnej sygnałów odpowiedzi,
- BR (Balanced Realisation), wyznaczane z pomocą funkcji autoregresji sygnałów
odpowiedzi,
- CVA (Canonical Variate Analysis), realizowana w podprzestrzeni stachostycznej.
Metodą LSCE daje się oszacować częstotliwości własne i modalne współczynniki
tłumienia. Jest rozszerzeniem metody CE (Complex Exponential) dla przypadku jednego
wejścia i wielu wyjść.
Do identyfikacji modelu modalnego obiektu stosowany jest w warunkach eksploatacji
obiektu system przestrzennego rozkładu drgań PCODS (Personal Computer Operation
Deflection Shapes). Metoda eksploatacyjnej analizy wyznaczania postaci drgań PCODS
oparta jest o wielokanałowy pomiar odpowiedzi w węzłowych punktach obiektu
rzeczywistego. System umożliwia graficzne przedstawienie zachowań dynamicznych
maszyny badanej w warunkach eksploatacyjnych. Danymi wejściowymi do systemu są
przebiegi czasowe drgań mechanicznych, występujących w węzłowych punktach maszyny,
odniesione do jednego z nich (o najwyższej amplitudzie). Wyznaczane są widma mocy
własne kk xxG i widma mocy wzajemne odpowiedzi i jG
ki xx , przy czym punkt "k"
obiektu jest punktem odniesienia, a punkty "i" są węzłowymi punktami obiektu.
Podstawowym elementem metody jest identyfikacja macierzy transmitancji widmowych
odpowiedzi:
(2.58)
Transmitancja widmowa Tik(j) zawiera informacje o amplitudach względnych i fazach
względnych (względem punktu odniesienia) zachowań eksploatacyjnych obiektu.

System PCODS składa się z trzech modułów:
1. Moduł modelowania konstrukcji. Umożliwia on stworzenie modelu geometrycznego
konstrukcji poprzez podanie współrzędnych węzłowych punktów (max 300 punktów
pomiarowych) oraz elementów łączących te punkty (max 400). Istnieje możliwość
wprowadzenia współrzędnych lokalnych (sferycznych lub cylindrycznych).
2. Moduł pomiarowy. Umożliwia wyznaczenie i przesłanie danych (charakterystyki dynamiczne
badanej maszyny).
W trakcie przesyłania wyznaczonych estymatorów można na ekranie mikrokomputera
obserwować poszczególne charakterystyki dynamiczne (w przypadku analizy dwukanałowej
można przeglądać funkcje transmitancji, koherencji oraz widma mocy lub estymatory
amplitudowe i fazy wyznaczanych sygnałów).
3. Moduł graficzny. W module tym następuje wizualizacja i animacja zachowań dynamicznych
obiektu dla zadanych częstotliwości. Można dla każdej częstotliwości drgań eksploatacyjnych
(ODS) uzyskać wynik w postaci tablicy zawierającej amplitudę i fazę drgań występujących w
poszczególnych punktach obiektu.
Inną metodą identyfikacji modeli modalnych na podstawie pomiarów w czasie
eksploatacji jest metoda BR. Metoda należy do grupy metod sformułowanych w
podprzestrzeni stochastycznej.
Inną metodą jest wykorzystanie pomiaru gęstości widmowej mocy wzajemnej i
własnej oraz wyznaczanie funkcji korelacji poprzez odwrotną transformacje Fouriera. Ze
względu na istnienie szybkich algorytmów realizujących przekształcenie Fouriera metoda ta
jest wykorzystywana częściej niż metoda oparta na bezpośrednim obliczaniu funkcji korelacji
na podstawie przebiegów czasowych.
Inną metodą, którą można zaliczyć do metod realizowanych w podprzestrzeni
stochastycznej jest metoda CVA (ang. Canonical Variate Analysis), która różni się od
poprzednio opisanej metody BR tym, że w celu identyfikacji parametrów macierzy
opisujących stan oraz wyjście dokonuje się rozkładu na wartości i wektory osobliwe ważoną
macierz Hankela.
EKSPERYMENTY ANALIZY MODALNEJ
Eksperyment w identyfikacji układów mechanicznych jest podstawowym źródłem
informacji o obiekcie, na podstawie którego ustala się strukturę modelu i wyznacza się
wartości parametrów (rys.2.29).
Rys.2.29. Istota i zestaw aparatury do realizacji eksperymentalnej analizy modalnej
OBIEKT BADAŃ
wymuszenie odpowiedź
transmitancja H(f)

Typowy zestaw aparatury do realizacji eksperymentu w analizie modalnej składa się z
następujących elementów:
- układ pomiaru wymuszenia i odpowiedzi;
- układ wstępnego przetwarzania sygnałów;
- układ przetwarzania i zbierania sygnałów;
- układ generowania sygnału wymuszającego;
- układ wzbudzania drgań.
W badaniach modalnych eksperyment polega na wymuszeniu ruchu układu i pomiarze
siły wymuszającej oraz odpowiedzi badanego układu. Wymuszenie ruchu układu realizowane
jest za pomocą wzbudników drgań (wibratorów) lub przy wymuszeniach uderzeniowych za
pomocą specjalnych młotków. W konstrukcji młotka występują: czujnik siły umożliwiający
pomiar siły wymuszającej, dodatkowa masa umieszczona w młotku w celu dostrojenia młotka
do wymaganego zakresu częstości oraz wymienna końcówka o różnej sztywności w celu
zmiany warunków lokalnych uderzenia. Taka konstrukcja młotka umożliwia wzbudzanie
drgań w układzie o odpowiedniej amplitudzie.
Jako odpowiedź układu na zadane wymuszenie mierzy się najczęściej przyśpieszenie
drgań, co znajduje uzasadnienie w teorii wibroakustyki maszyn [16,81].
Układy pomiarowe najczęściej są wielokanałowymi, umożliwiającymi jednocześnie
pomiar wymuszenia i odpowiedzi. Estymacja charakterystyk dynamicznych w analizie
modalnej może być prowadzona dwojako:
- za pomocą metody wymuszenia ruchu układu wieloma wzbudnikami w celu wzbudzenia
jednej z postaci drgań własnych;
- za pomocą metody wymuszenia ruchu układu w jednym lub w wielu punktach dla potrzeb
pomiaru funkcji przejścia.
Systemy pomiarowe stosowane w analizie modalnej są oparte na różnym sprzęcie
obliczeniowym (specjalizowane analizatory, komputery PC z kartą przetwornika A/C, stacje
robocze z interfejsem pomiarowym, LMS SCADAS Recorder, LMS Virtual.Lab, LMS
AmeSIM i inne).
PODSUMOWANIE
Jedną z metod opisu stanu maszyny jest diagnostyka drganiowa – rozumiana jako
zorganizowany zbiór metod i środków do oceny stanu technicznego (jego przyczyn, ewolucji
i konsekwencji) systemów technicznych, przy wykorzystaniu procesów drganiowych lub
sygnału hałasu.
Przykładowe sposoby modelowania zjawisk, wnioskowania różnymi metodami oraz
pokazane składowe systemów pomiarowych stanowią tylko elementarną wiedzę z tego
zakresu, gdyż nie jest możliwe w tego typu pracy przedstawić całości zagadnień, będących w
ciągłym dynamicznym rozwoju.
Przedstawiony materiał w tym rozdziale pokazuje głębię problematyki diagnostyki
drganiowej obiektów technicznych w zakresie fizycznej interpretacji wszelkich poczynań na
drodze przyczynowo – skutkowego wnioskowania, prowadzącego w efekcie do zasad budowy
procedur diagnozowania. Obejmuje on zarówno mechanizmy i procedury generacji sygnałów
diagnostycznych, ich akwizycji, przetwarzania i wizualizacji, a na systemie diagnostycznym
kończąc.
Przytoczone skrótowo powyżej treści główne, motywujące potrzebę i rozwój
diagnostyki technicznej stanowią zręby podstaw składających się na nową dziedzinę wiedzy
jaką jest uznana już diagnostyka drganiowa.