Wektory, Pochodne, Całki. Wiesława Korczak, Marianna Trajdos
1 Wektory, proste i płaszczyzny w przestrzeni
Punkty w R3 opisujemy trójkami liczb (współrzędnymi): A = (xA, yA, zA).Wektory zaczepione to pary punktów −−→AB; wektory swobodne (albo po prostu
wektory) to klasy równoważności wektorów zaczepionych względem odpowiedniej relacji.Na wektorach swobodnych określone jest dodawanie i mnożenie przez skalary, czyli
tworzą one przestrzeń liniową. Przestrzeń tę można uważać za tożsamą z R3, utożsamiającpunkt A z klasą równoważności wektora
−→OA (tu i dalej O = (0, 0, 0)).
Prosta przechodząca przez O jest podprzestrzenią liniową wymiaru 1, więc ma bazęskładającą się z jednego wektora V . Prostą taką można zapisać jako p0 = {tV : t ∈ R}.Prosta nieprzechodząca przez zero jest warstwą pewnej jednowymiarowej podprzestrzenipiniowej i może być zapisana jako p = {P + tV : t ∈ R}, albo we współrzędnych: x =p1 + tv1, y = p2 + tv2, z = p3 + tv3. Taki zapis nazywamy równaniem parametrycznymprostej.
Równanie parametryczne prostej:
p = {P + tV }, czyli X = P + tV lub
{ x = p1 + tv1
y = p2 + tv2
z = p3 + tv3
Z równania parametrycznego można wyrugować zmienną t, dostając t = (x−p1)/v1 =(x − p2)/v2 = (x − p2)/v2. Taka postać równania prostej nazywa się równaniem zwy-czajnym.
Równanie zwyczajne prostej:
x− p1
v1=
y − p2
v2=
z − p3
v3
Płaszczyzna to również podprzestrzeń liniowa lub jej warstwa, ale wymiaru 2. Rów-nanie parametryczne płaszczyzny można zapisać analogicznie do równania prostej.
Równanie parametryczne płaszczyzny:
p = {P + tV + sW : t, s ∈ R}, czyli X = P + tV + sW lub
{x = p1 + tv1 + sw1
y = p2 + tv2 + sw2
z = p3 + tv3 + sw3
Można też zadać płaszczyznę równaniem postaci ax + by + cz + d = 0, gdzie a, b, c niesą jednocześnie równe 0. Takie równanie nazywa się równaniem ogólnym.
Równanie ogólne płaszczyzny:
π = {(x, y, z) : ax + by + cz + d = 0}
1

Równanie to można zinterpretować w terminach iloczynu skalarnego.
Iloczyn skalarny:
V ◦W = v1w1 + v2w2 + v3w3 dla V = (v1, v2, v3) i W = (w1, w2, w3)
Własności iloczynu skalarnego:• U◦V = V ◦ U (symetryczny);• U ◦ (V + W ) = U ◦ V + U ◦W , U ◦ tV = t(U ◦ V ) (dwuliniowy);• V ◦ V = |V |2 ≥ 0, V ◦ V = 0 tylko dla V = 0 (dodatnio określony);• U ◦ V = 0 wtedy i tylko wtedy gdy U ⊥ V (twierdzenie Pitagorasa);• U ◦ V = |U | · |V | · cos(<) UV ).
Dla ustalonego wektora A = (a, b, c) zbiór wektorów X do niego prostopadłych tworzypodprzestrzeń liniową zadaną równaniem ax + by + cz = 0:
{X : X ◦A = 0} = {(x, y, z) : ax + by + cz = 0}i że dowolna warstwa tej podprzestrzeni zadana jest równaniem ax + by + cz + d = 0:
{X = X0 + Y : Y ◦A = 0} = {X : (X −X0) ◦A = 0}= {(x, y, z) : a(x− x0) + b(y − y0) + c(z − z0) = 0}= {(x, y, z) : ax + by + cz + (−ax0 − by0 − cz0)
︸ ︷︷ ︸
d
= 0}.
Można zadać prostą jako część wspólną dwóch płaszczyzn. Układ dwóch (liniowoniezależnych) równań liniowych (równań ogólnych nierównoległych płaszczyzn) nazywa sięrównaniem krawędziowym prostej.
Równanie krawędziowe prostej:{
a1x + b1y + c1z + d1 = 0a2x + b2y + c2z + d2 = 0
Równanie krawędziowe prostej oraz równanie parametryczne płaszczyzny definiująwyznaczany obiekt przy pomocy dwóch wektorów U i V . Równanie parametryczne (bądźzwyczajne) prostej oraz równanie ogólne płaszczyzny wykorzystują tylko jeden wektorW , prostopadły do U i V . Aby przejść od równania krawędziowego do parametrycznegoprostej bądź od równania parametrycznego do ogólnego płaszczyzny, trzeba więc umiećwyznaczyć (jakiś) wektor prostopadły do dwóch danych. Można to zrobić przy pomocyiloczynu wektorowego:
Iloczyn wektorowy:
U × V = (u2v3 − u3v2,−u1v3 + u3v1, u1v2 − u2v1)dla U = (u1, u2, u3), V = (v1, v2, v3)
2

Mnemotechnika:U × V = det
u1 v1 E1
u2 v2 E2
u3 v3 E3
= u1v2E3 + v1E2u3 + · · · = (u2v3 − u3v2)E1++(−u1v3 + u3v1)E2 + (u1v2 − u2v1)E3.
Własności iloczynu wektorowego:• U × V = −V × U (antysymetryczny);• U × (V + W ) = U × V + U ×W , U × tV = t(U × V ) (dwuliniowy);• U × V ⊥ U , U × V ⊥ V ;• |U × V | = |U | · |V | · sin<) (U, V ) (pole równoległoboka rozpiętego przez U i V , czyli
2×pole trójkąta);• iloczyn mieszany (U×V )◦W = det(U, V, W ) (objętość równoległościanu rozpiętegoprzez U , V i W , czyli 6×objętość czworościanu.
Przykład. Dana jest prosta o równaniu krawędziowym p =
{2x + 3y − 3z + 5 = 0x + 3y − 2 = 0.
Oznacza to, że prosta ta leży w pewnej płaszczyźnie prostopadłej do wektora U =(2, 1,−3), jak również w płaszczyźnie prostopadłej do wektora V = (1, 3, 0). Prostaprostopadła jednocześnie do wektorów U i V musi być równoległa do wektoraW = U×V =(9,−3, 5). Jej równanie parametryczne ma więc postać p = {P + t(9,−3, 5) : t ∈ R}, gdzieP jest dowolnym punktem należącym do p, np. P = (2, 0, 3).
Przejście w drugą stronę (od danego równania p = {(2, 0, 3) + t(9,−3, 5) : t ∈ R} dodowolnego równania krawędziowego danej prostej) wymaga znalezienia dwóch nierówno-ległych wektorów prostopadłych do (9,−3, 5), np. (3, 9, 0) i (0, 5, 3).
Zadania
1.1. Czy każda prosta ma równanie zwyczajne?1.2. Sprawdź, że iloczyn skalarny zdefiniowany podanym wzorem rzeczywiście ma wszys-tkie wymienione wlasności.
1.3. Sprawdź, że iloczyn wektorowy zdefiniowany podanym wzorem rzeczywiście ma wszys-tkie wymienione wlasności.
1.4. Sprawdź, czy prosta o równaniu x = 2− t, y = −3 + 2t, z = 1 + ta) przechodzi przez punkty A(1,−1, 4), B(0, 1, 3);b) leży na płaszczyźnie x− 2y + 3z = 9.
1.5. Podaj równanie płaszczyznya) przechodzącej przez punkt A(−3, 1, 0) i równoległej do płaszczyzny x+3y−2z +
5 = 0;b) przechodzącej przez punkty (1, 4, 2), (−1, 0, 2), (3, 5, 1).
1.6. Dla jakich wartości a i b punkty (−2, 4, a) i −2, b, 3) leżą na płaszczyżnie 4x − 3y −z + 2 = 0?
3
2 Kąty między wektorami, prostymi, płaszczyznami
Kąty między wektorami:
cos<) (U, V ) =U ◦ V
|U | · |V | sin<) (U, V ) =|U × V ||U | · |V |
Kąt między prostymi to mniejszy z dwu kątów między ich wektorami kierunk-owymi.
Kąt między prostymi:
<) (p, l) = <) (U, V ) dla p = {P + tU : t ∈ R}, l = {L + sV : s ∈ R} i <) (U, V ) ≤ π
2
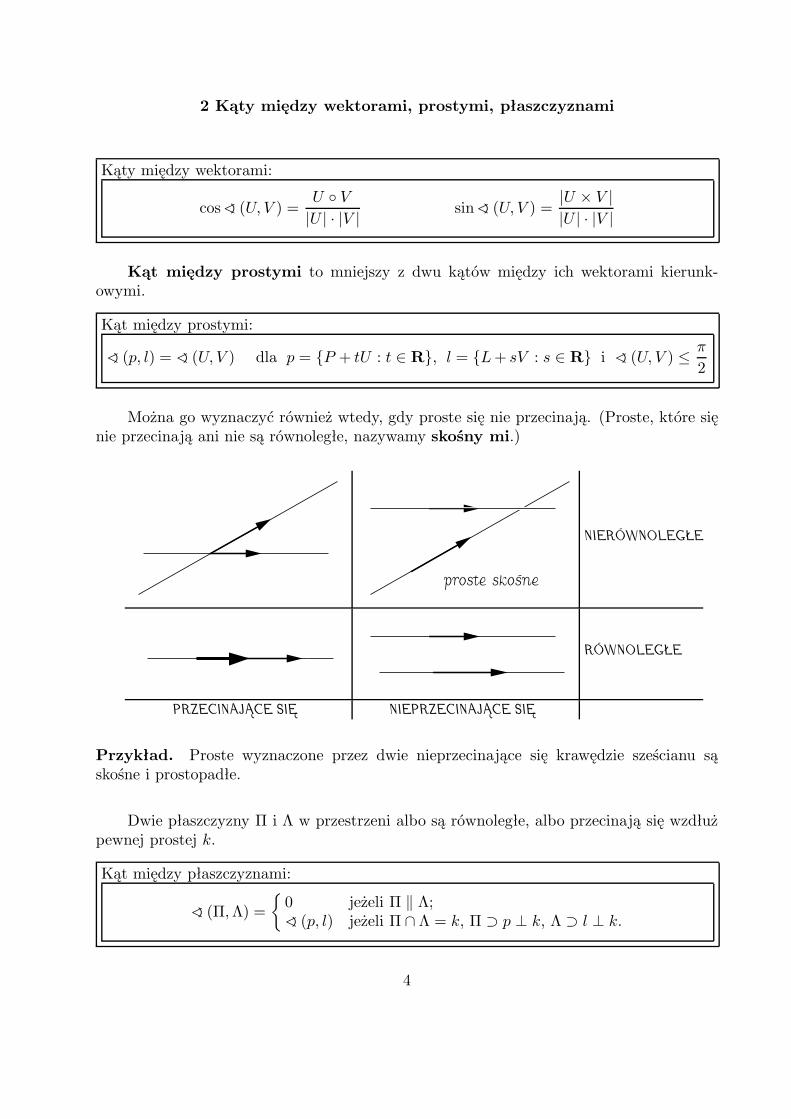
Można go wyznaczyć również wtedy, gdy proste się nie przecinają. (Proste, które sięnie przecinają ani nie są równoległe, nazywamy skośny mi.)
proste skośne
NIERÓWNOLEGŁE
RÓWNOLEGŁE
PRZECINAJĄCE SIĘ NIEPRZECINAJĄCE SIĘ
Przykład. Proste wyznaczone przez dwie nieprzecinające się krawędzie sześcianu sąskośne i prostopadłe.
Dwie płaszczyzny Π i Λ w przestrzeni albo są równoległe, albo przecinają się wzdłużpewnej prostej k.
Kąt między płaszczyznami:
<) (Π, Λ) =
{0 jeżeli Π ‖ Λ;<) (p, l) jeżeli Π ∩ Λ = k, Π ⊃ p ⊥ k, Λ ⊃ l ⊥ k.
4

Fakt. Kąt między płaszczyznami jest równy kątowimiędzy ich wektorami normalnymi (wybieramy znakwektora normalnego tak, aby kąt ten nie przekraczałπ/2).
Prosta p i płaszczyzna Λ albo są równoległe (wliczając w to przypadek, kiedy p ⊂ Λ),albo się przecinają.
Kąt między prostą a płaszczyzną:
<) (p, Λ) =
{0 jeżeli p ‖ Λ;<) (p, l) jeżeli l = Λ ∩ Π, p ⊂ Π ⊥ Λ.
Fakt. <) (p, Λ) =π
2−<) (p, NΛ) (gdzie NΛ jest wek-
torem normalnym do Λ o takim zwrocie, że <) (p, NΛ)
nie przekraczaπ
2).
Zadania
2.1. Dla jakich wartości parametru α płaszczyzny αx+y−α2z +1 = 0 i x+αy+z−α = 0są a) równoległe
b) prostopadłe?2.2. Wyznacz kąty między przekątnymi ścian sześcianu (rozważ wszystkie możliwe paryprzekątnych).
2.3. Płaszczyzny Π i Λ przecinają się pod kątem π/3. Proste p i l leżą odpowiednio wpłaszczyznach Π i Λ. Jakie wartości może przyjmować kąt między prostymi p i l?
2.4. Proste k i l są skośne, a punkt P nie leży na żadnej z nich. Czy zawsze istnieje prostaprzechodząca przez P i przecinająca obie dane proste? Czy może być więcej niż jednataka prosta?
2.5. Proste p, k i l są parami skośne. Pokaż, że istnieje nieskończenie wiele prostychprzecinających wszystkie trzy dane proste.
(Alternatywne definicje kąta)2.6. Prosta p oraz płaszczyzna Λ przechodzą przez początek układu współrzędnych. Dladowolnego niezerowego wektora X ∈ Λ niech α(X) oznacza kąt między wektorem Xa prostą p. Pokaż, że najmniejsza wartość przyjmowana przez α(X) równa się kątowimiędzy prostą p a płaszczyzną Λ.
2.7. Płaszczyzny Π i Λ przechodzą przez początek układu współrzędnych. Dla dowolnegoniezerowego wektoraX ∈ Λ niech α(X) oznacza kąt między wektoremX a płaszczyznąp. Pokaż, że największa wartość przyjmowana przez α(X) równa się kątowi międzypłaszczyznami Π i Λ.
5

3 Odległości, pola i objętości
Odległość punktu A od punktu B to to samo, co długość wektora−−→AB:
d(A, B) = |−−→AB|.
Odległość punktu A od prostej p lub płaszczyzny Π:
d(A, p) = d(A, P ), gdzie P ∈ p i−→AP ⊥ p;
d(A, Π) = d(A, P ), gdzie P ∈ Π i−→AP ⊥ Π.
Weźmy p = BC w danym trójkącie ABC. Mamy Pole(ABC) = 12 |−−→BA × −−→BC|, ale
−−→BA×−−→BC = (
−−→BP +
−→PA)×−−→BC =
−−→BP ×−−→BC +
−→PA×−−→BC i |−−→BP ×−−→BC| = 0, zaś
−→PA ⊥ −−→BC,
czyli |−−→BA × −−→BC| = |−→PA × −−→BC| = |−→PA||−−→BC| – dostajemy znany wzór na pole trójkąta:Pole(ABC) = 1
2 · (podstawa) · (wysokość).Weźmy Π = BCD w danym czworościanie ABCD. Wówczas Objętość(ABCD) =
16 |(−−→BC × −−→BD) ◦ −−→BA|, ale (
−−→BC × −−→BD) ◦ −−→BA = (
−−→BC × −−→BD) ◦ (
−−→BP +
−→PA = (
−−→BC × −−→BD) ◦
−−→BP +(
−−→BC ×−−→BD) ◦−→PA i (
−−→BC×−−→BD) ◦−−→BP = 0, bo
−−→BC×−−→BD ⊥ BCD ∋ −−→BP czyli |(−−→BC×−−→
BD) ◦ −→PA| = 2Pole(ABC)|−→PA| sin<) (−→PA, BCD) – dostajemy znany wzór na objętość
czworościanu Objto(ABCD) = 13 (pole podstawy) · (wysokość)
Odległość prostej (lub płaszczyzny) od prostej (lub płaszczyzny):
d(p, l) = d(P, L), gdzie P ∈ p, L ∈ l i−→PL ⊥ p,
−→PL ⊥ l
d(Π, Λ) = d(P, L), gdzie P ∈ Π, L ∈ Λ i−→PL ⊥ Π,
−→PL ⊥ Λ.
d(p, Λ) = d(P, L), gdzie P ∈ p, L ∈ Λ i−→PL ⊥ p,
−→PL ⊥ Λ.
Zadania
3.1. Podaj równanie opisujące zbiór punktów równo odległych od punktów (−2, 0, 2) i(2, 2, 4). Jaki to zbiór?
3.2. Oblicz odległość między przeciwległymi krawędziami czworościanu foremnego o kra-wędzi długości 1.
3.3. Oblicz odległość między płaszczyznami wyznaczonymi przez dwie przeciwległe ścianyośmiościanu foremnego o krawędzi a.
3.4. Podaj przykład trzech prostych k, l, m parami skośnych o tej własności, że odległośćd(k, l) = 3, d(l, m) = 4 a d(m, k) = 5.
(Alternatywna definicja odległości)3.5. Dla dowolnych podzbiorów przestrzeni A i B niech dist(A,B) = min d(A, B), gdzie
A i B są dowolnymi punktami odpowiednio w A i B ∈ B. Pokaż, że jeżeli A i B sązbiorami jednopunktowymi, prostymi lub płaszczyznami, to dist(A,B) = d(A,B).
6
4 Rzuty prostopadłe
Rzut prostopadły na prostą p to odwzorowanie prp : R3 → p zdefiniowane następująco:
Rzut prostopadły na prostą:
prp(A) = A′ takie, że−−→AA′ ⊥ p
Uwaga: A ∈ p ⇐⇒ prp(A) = (A).
Przykład. Rzuty prostopadłe wierzchołków prostopadłościanu o krawędziach a, b, c naprzekątną prostopadłościanu nie zawierającą tego wierzchołka.
Wybieramy układ współrzędnych z początkiem w jednym z końców krawędzi i z osiamiwzdłuż krawędzi. Równanie parametryczne krawędzi to p = {t(a, b, c) : t ∈ R}. Będziemyrzutować wierzchołek A = (a, 0, 0). Rzut A′ leży na p, więc A′ = t(a, b, c) dla pewnego t,zaś−−→AA′ ⊥ p, czyli (ta − a, tb, tc) ⊥ (a, b, c). Wobec tego ta2 − a2 + tb2 + tc2 = 0, skąd
t =a2
a2 + b2 + c2. Mamy A′ =
a2
a2 + b2 + c2(a, b, c).
Ćwiczenie: Znajdź pozostałe rzuty.
Rzut prostopadły na płaszczyznę Π to odwzorowanie prΠ : R3 → Π zdefiniowanenastępująco:
Rzut prostopadły na płaszczyznę:
prΠ(A) = A′ takie, że−−→AA′ ⊥ Π
Uwaga: skoro−−→AA′ ⊥ Π, to znaczy, że
−−→AA′ = t·NΠ dla pewnego t, czyli A′ = {A+tNΠ :
t ∈ R}∩Π. Dlatego szczególnie łatwo jest znajdować rzuty punktów na płaszczyznę zadanąrównaniem ogolnym.
Przykład. Rzut punktu A = (1, 5, 2) na płaszczyznę Π = {(x, y, z) : x + 2y − z + 3 = 0}NΠ = (1, 2,−1), więc A′ = (1, 5, 2) + t(1, 2,−1). Kiedy (1 + t, 5 + 2t, 2 − t) ∈ Π?
Wstawiamy do równania: (1 + t) + 2(5 + 2t) − (2 − t) + 3 = 0, skąd t = −2, czyliA′ = (−1, 1, 4).
Uwaga: jak poprzednio, prΠ(A) = A ⇐⇒ A ∈ Π.
Fakt: Rzut prostopadły na prostą lub płaszczyznę jest złożeniem przekształcenia liniowegoi przesunięcia: pr(X) = MX + V .
W szczególności, rzut jako odwzorowanie na wektorach swobodnych jest liniowy:pr(−−→AB = prB − prA = (MB + V )− (MA + V ) = M(B − A).
Szczególnie proste wzory mają rzuty na osie i płaszczyzny współrzędnych:prOx((x, y, z)) = (x, 0, 0), proy((x, y, z) = . . .prOxy((x, y, z)) = (x, y, 0), . . .Ćwiczenie: Uzupełnij powyższe linijki.
7

Własności rzutów:• |prp(A)| ≤ |A| tj. rzut nie zwiększa długości wektora, a dokładniej:
|prp(V )| = |V | cos<) (p, V );• rzut trójkąta jest trójkątem (być może zdegenerowanym) o polu nie większym niż poleoryginalnego trójkąta:
Pole(prOxy(OAB)) ≤ Pole(OAB),
bo Pole(OAB) =1
2|A×B| =
∣∣∣∣∣det
a1 b1 E1
a2 b2 E2
a3 b3 E3
∣∣∣∣∣= |(c1, c2, c3)|,
zaś Pole(prOxyOAB) =1
2|prA× prB| =
∣∣∣∣∣det
a1 b1 E1
a2 b2 E2
0 0 E3
∣∣∣∣∣= |(0, 0, c3)|.
Wniosek:prOxyA × prOxyB = prOz(A × B), zatem Pole(prOxyOAB) = |prOxyA × prOxyB| =|prOz(A×B)| = |(A×B)| cos<) (N0AB, Oz) = Pole(OAB) cos<) (OAB, Oxy).
Przykład. Jak się zmienia kąt między wektorami A i B przy rzucie pr = prOxy?
cos<) (A, B) =a1b1 + a2b2 + a3b3
|A||B| , zaś cos<) (prA, prB) =a1b1 + a2b2 + a3b3
|prA||prB| .
Niech na przykład A = (1, 0, z), B = (0, 1, z). Wtedy
cos<) (A, B) =z2
1 + z2−→z→∞
1, czyli <) (A, B)→ 0.
Z drugiej strony, dla A = (1, 0,−z), B = (0, 1, z) mamy
cos<) (A, B) =−z2
1 + z2−→z→∞
− 1, czyli <) (A, B)→ π.
Ale jeżeli wiadomo, że a3b3 ≤ 0 (tzn. A i B leżą po przeciwnych stronach płaszczyzny, naktórą rzutujemy) i <) (A, B) jest ostry, to
0 ≤ a1b1 + a2b2 + a3b3 ≤ a1b1 + a2b2
|A||B| ≥ |prA||prB|=⇒ cos<) (A, B) ≤ cos<) (prA, prB)
<) (A, B) ≤ <) (prA, prB)
Zadania
4.1. Można napisać 33 różnych zdań postaci: Rzut prostopadły bździągwy na bździągwęmoże być bździągwą, zastępując słowo bździągwa słowami punkt, prosta bądź płasz-czyzna w odpowiedniej formie gramatycznej. Które z tych zdań są prawdziwe?
4.2. Znajdź punkty, które są rzutami:a) wierzchołków sześcianu na prostą zawierającą przekątną jego ściany;b) wierzchołków czworościanu na jedną z jego krawędzi.
4.3. Dany jest wielościan wypukły wykonany z nieznanego materiału o zmiennej gęstości.Pokaż, że co najmniej jedna ze ścian tego wielościanu ma tę własnośc, że rzut środkaciężkości wielościanu na płaszczyznę ściany leży wewnątrz tej ściany. (Wskazówka:postaw wielościan na stole i patrz, czy się przewróci.)
8
5 Kąty wielościenne
Kąt wielościenny (inaczej naroże) to podzbiór przestrzeni ograniczony pewną liczbąkątów płaskich k1, k2, . . . , kn, z których każda para ki, ki+1 (wliczając parę kn, k1) mawspólne ramię, wszystkie mają wspólny wierzchołek, a poza tym się nie przecinają.Kąt wielościenny wypukły to otoczka wypukła skończenie wielu pólprostych o
wspólnym początku albo równoważnie przekrój skończenie wielu pólprzestrzeni, którychbrzegi przecinają się w jednym punkcie.
Analogia z wielokątem:
wielokąt ←→ kąt wielościennyboki ←→ kąty płaskiekąty ←→ kąty dwuścienne
wielokąt wypukły ←→ kąt wielościenny wypukłyotoczka wypukła punktów ←→ otoczka wypukła półprostychprzekrój półpłaszczyzn ←→ przekrój półprzestrzeni
Opis analityczny kąta wielościennego wypukłego jako przekroju półpłaszczyzn:{X : X ◦A1 ≥ 0, X ◦A2 ≥ 0, . . . , X ◦An ≥ 0}.
Ćwiczenie 5.1. Ile różnych kątów trójściennych wyznaczają trzy proste przecinające sięw jednym punkcie? A trzy półproste o wspólnym wierzchołku?
Nierówności o kątach trójściennych
Oznaczenia: wierzchołek O; półproste a, b, c; kąty płaskie α = <) (b, c), β = <) (c, a),γ = <) (a, b); kąty dwuścienne <) a przy półprostej a, <) b przy b, <) c przy c; w raziepotrzeby punkty A ∈ a, B ∈ b, C ∈ c.
Nierówność trójkąta:
α + β > γ
Dowód.Jeśli γ ≤ β, to już. Jeśli γ > β, to weźmy punkty A, B oraz C′ na odcinku AB tak, aby<) AOC′ = <) AOC. Wybierzmy C tak, aby OC = OC′. Porównując trójkąty OBC iOBC′ mamy <) BOC > <) BOC′, zatem
α + β = <) BOC + <) AOC > <) BOC′ + <) AOC′ = <) AOB = γ.
Suma kątów płaskich wypukłego kąta trójściennego:
α + β + γ < 2π.
Dowód.Punkty A, B, C na półprostych a, b, c w odległości 1 od O. O′ – rzut O na płaszczyznęABC. Wtedy <) AOB < <) AO′B, <) BOC < <) BO′C, <) COA < <) CO′A; wobec tego
9

<) AOB + <) BOC + <) COA < <) AO′B + <) BO′C + <) CO′A =
=
{2πmax{<) AO′B, <) BO′C, <) CO′A}
(w zależności od położenia punktu O′: wewnątrz czy na zewnątrz trójkąta ABC).
Suma kątów dwuściennych wypukłego kąta trójściennego:
<) a + <) b + <) c > π.
Pojęcie potrzebne w dowodzie:Kąt biegunowy danego wypukłego kąta trójściennego to kąt trójścienny o tym
samym wierzchołku i krawędziach a′, b′, c′, gdzie:a′ ⊥ bc, a i a′ po przeciwnych stronach bc;b′ ⊥ ac, b i b′ po przeciwnych stronach ac;c′ ⊥ ab, c i c′ po przeciwnych stronach ab.Własności kąta biegunowego:• kąt biegunowy kąta wypukłego jest wypukły;• relacja biegunowości jest symetryczna: a ⊥ b′c′, bo b′ ⊥ a i c′ ⊥ a;• zachodzi następujący związek między kątami dwuściennymi danego kąta trójściennegoa kątami płaskimi jego kąta biegunowego (i odwrotnie):
Lemat o kącie biegunowym:
α′ + <) a = β′ + <) b = γ′ + <) c = π
Dowód. α′ = <) (b′, c′) = <) (Nac,±Nab) = π −<) (ab, ac) = π −<) a.
Dowód (twierdzenia o sumie kątów dwuściennych kąta trójściennego).<) a + <) b + <) c = π − α′ + π − β′ + π − γ′ = 3π − (α′ + β′ + γ′) > π.
Twierdzenie o kącie w kącie:
Jeśli z dwóch kątów trójściennych o wspolnym wierzchołku jeden („mniejszy”) zawierasię w drugim („większym”), to:
• suma kątów płaskich mniejszego kąta trójściennego jest mniejsza niż suma kątówpłaskich większego kąta trójściennego;
• suma kątów dwuściennych mniejszego kąta trójściennego jest mniejsza niż sumakątów dwuściennych większego kąta trójściennego;
Dowód.Przypadek 1:d – półprosta zawarta w kącie płaskim γ,d1 + d2 = π, γ1 + γ2 = γα + γ2 + δ <
nier.
trójk.
α + γ2 + (γ1 + β) = α + γ + β
c1c2
γ2d2d1
1γ
c
δα
bβ
d
a
10

Przypadek 2(półprosta d wewnątrz kąta trójściennego,d′ – prosta przecięcia płaszczyzn ad i bc):∑
kątów płaskich abd <∑
kątów płaskich abd′ <∑
kątów płaskich abc∑
kątów dwuściennych abd <∑
kątów dwuściennych abd′ <∑
kątów dwuściennych abc
Przypadek 3(kąt cde, półprosta d wewnątrz kąta ab, półprosta e wewnątrz kąta ac):∑
kątów płaskich cde <∑
kątów płaskich acd <∑
kątów płaskich abc∑
kątów dwuściennych cde <∑
kątów dwuściennych acd <∑
kątów dwuściennych abcItd.
Przykłady: kąty czworościenne.
a) wypukły (wszystkie 4 kąty dwuścienne < π)2π > (α + α′) + β + (γ + γ′) > α + β + γ + δ
b) „siodłowaty”
Zadanie ze Zwardonia: Punkt O leży we wnętrzuczworościanu ABCD. Pokazać, że
<) AOB + <) BOC + <) COD + <) DOA > 2π.
α
α
γ
γ
βδ
’
’
Zadania
5.1. Podaj przykłady dwóch niewypukłych kątów trójściennych: takiego, który spełnianierówność trójkąta, i takiego, który jej nie spełnia.
5.2. Czy istnieje kąt trójścienny w któryma) dokładnie dwa z kątów dwuściennych są proste;b) wszystkie kąty dwuścienne są ostre;c) jeden z kątów dwuściennych jest prosty, a dwa pozostałe są rozwarte;d) jeden z kątów dwuściennych jest prosty, a dwa pozostałe są ostre?
5.3. Zastanów się, jak mogą wyglądać uogólnienia poznanych nierówności o kątach trój-ściennych (nierówność trójkąta, suma kątów płaskich < 2π, suma kątów dwuściennych> π) na przypadek wypukłych kątów wielościennych.
5.4. Udowodnij następujący fakt (zwany czasem twierdzeniem o trzech prostopadłych):prosta p zawarta w płaszczyźnie Π jest prostopadła do danej prostej l nieprostopadłejdo płaszczyzny Π wtedy i tylko wtedy gdy jest prostopadła do rzutu l′ prostej l napłaszczyznę Π.
5.5. Wykorzystując twierdzenie o trzech prostopadłych udowodnij, że jeśli w czworościanieABCD krawędź AD jest prostopadła do płaszczyzny ABC, to w rzucie prostopadłymna płaszczyznę BCD ortocentrum trójkąta ABC przechodzi na ortocentrum trójkątaBCD.
11

6 Twierdzenia sinusów i cosinusów dla kątów trójściennych
Oznaczenia: wierzchołek O; półproste a, b, c; kąty płaskie α = <) (b, c), β = <) (c, a),γ = <) (a, b); kąty dwuścienne <) a przy półprostej a, <) b przy b, <) c przy c; w raziepotrzeby punkty A ∈ a, B ∈ b, C ∈ c.
Twierdzenie sinusów:
sin<) a
sinα=sin<) b
sinβ=sin<) c
sin γ
Dowód.A′ – rzut A na płaszczyznę prostych b i c;B – rzut A (więc i A′) na prostą b;C – rzut A (więc i A′) na prostą c;AC ⊥ c, więc AC = OA sinβ, podczas gdyAA′ = AC sin<) c = OA sinβ sin<) canalogicznie AB ⊥ b, AB = OA sin γ,AA′ = AB sin<) b = OA sin γ sin<) bstąd sinβ sin<) c = sin γ sin<) b,
czylisin<) b
sinβ=sin<) c
sin γ
A’
A
C
B
Twierdzenia cosinusów:
cosα = cosβ cos γ + sinβ sin γ cos<) acos<) a = − cos<) b cos<) c + sin<) b sin<) c cosα
Dowód.|−→OA| = |−−→OB| = |−−→OC| = 1, <) (
−→U ,−→V ) = <) a−−→
OB =−→OA cos γ +
−→U ,
−→U ⊥ −→OA, |−→U | = sin γ−−→
OC =−→OA cosβ +
−→V ,
−→V ⊥ −→OA, |−→U | = sinβ−−→
OB ◦ −−→OC = |−−→OB||−−→OC| cosα = cosα−−→OB ◦ −−→OC = (
−→OA cos γ +
−→U ) ◦ (
−→OA cosβ +
−→V ) =
= cos γ cosβ + sinβ sin γ cos<) a
czyli cosα = cos γ cosβ + sinβ sin γ cos<) ai to samo dla kąta biegunowegocosα′ = cos γ′ cosβ′ + sinβ′ sin γ′ cos<) a′
gdzie α′ = π −<) a, β′ = π −<) b,γ′ = π −<) c, <) a′ = π − α,
czyli cosα′ = − cos<) a, cosβ′ = − cos<) b,cos γ′ = − cos<) c, sinβ′ = sin<) b,sin γ′ = sin<) c, cos<) a′ = − cosα
A
B
C
U
V
skąd − cos<) a = (− cos<) c)(− cos<) b) + sin<) b sin<) c (− cosα).
12

Przykład (zadanie pana Kaźmierczaka).p ⊂ Π, k′ = prΠ(k), <) (p, k′) = π
3.
Jakie wartości może przyjmować <) (p, k)?Jaki trzeba wziąć <) (k, k′), żeby dostać zadany <) (p, k)?
α = <) (p, k), β = <) (k, k′), <) k′ = π2 .
Twierdzenie cosinusów:cosα = cosβ cos π
3 + sinβ sin π3 cos
π2 ,
ale cos π3
= 12i cos π
2= 0,
czyli wystarczy wziąć takie β, że cosβ = 2 cosα.p
k
k’β
α
Ale: 0 ≤ β ≤ π2 =⇒ 1 ≥ cosβ ≥ 0 =⇒ 1
2 ≥ 12 cosβ = cosα ≥ 0 =⇒ π
3 ≤ α ≤ π2 .
Zadania
6.1. Wskaż, gdzie w dowodzie twierdzenia sinusów dla kąta trójściennego używa się twier-dzenia o trzech prostopadłych (patrz zadanie 5.4).
6.2. Wyznacz kąty dwuścienne w kącie trójściennym, znając kąty płaskie α = β = π/3 iwiedząc, że kąt dwuścienny przy ich wspólnym ramieniu wynosi π/2.
6.3. Pokaż, że jeśli dwa kąty płaskie kąta trójściennego są równe, to dwa jego kąty dwu-ścienne też są równe (i odwrotnie).
6.4. Pokaż, że kąty między dwusiecznymi kątów płaskich danego kąta trójściennego są albowszystkie trzy ostre, albo wszystkie trzy proste, albo wszystkie trzy rozwarte.
6.5. W pewnym kącie trójściennym wszystkie kąty płaskie są równe, a ich dwusieczne sąparami prostopadłe. Znajdź kąty dwuścienne tego kąta.
6.6. Wyznacz kąty dwuścienne między sąsiednimi ścianami czworościanu foremnego. Zróbto samo dla kilku innych swoich ulubionych brył.
6.7. Udowodnij, że jeśli wszystkie kąty płaskie w kącie trójściennym są rozwarte, to wszys-tkie kąty dwuścienne też są rozwarte. Czy prawdą jest, że jeśli dwa z kątów płaskichsą rozwarte, to przynajmniej jeden kąt dwuścienny jest rozwarty?
6.8. Czy prawdą jest, że:a) jeżeli wszystkie kąty płaskie kąta trójściennego są ostre, to wszystkie kąty dwu-ścienne też są ostre;
b) jeżeli jeden z kątów płaskich kąta trójściennego jest prosty, to co najmniej jedenz kątów dwuściennych jest prosty?
13
7 Wewnętrzna geometria sfery
Geometria: punkty, proste, odległości, kąty.Punkty na sferze.Proste: koła wielkie (najkrótsze drogi, tzw. geodezyjne).
Odległości: mierzone na sferze (długość łuku koła wielkiego, nie odcinka;d(N, S) = πR, nie 2R).Ustalmy R = 1; wtedy d(N, S) = π i ogólnie d(A, B) = <) (
−→OA,−−→OB).
Kąty: między „prostymi”, tj. łukami kół wielkich (ich wektorami stycznymi).Koło wielkie wyznacza płaszczyznę przez środek sfery; kąt między kołami wielkimi to
kąt (dwuścienny) między odpowiednimi płaszczyznami.<) (Π, Λ) = <) (NΠ, NΛ)Wektory normalne do płaszczyzn kół wielkich: bieguny. Kąt między kołami to od-
ległość między ich biegunami.
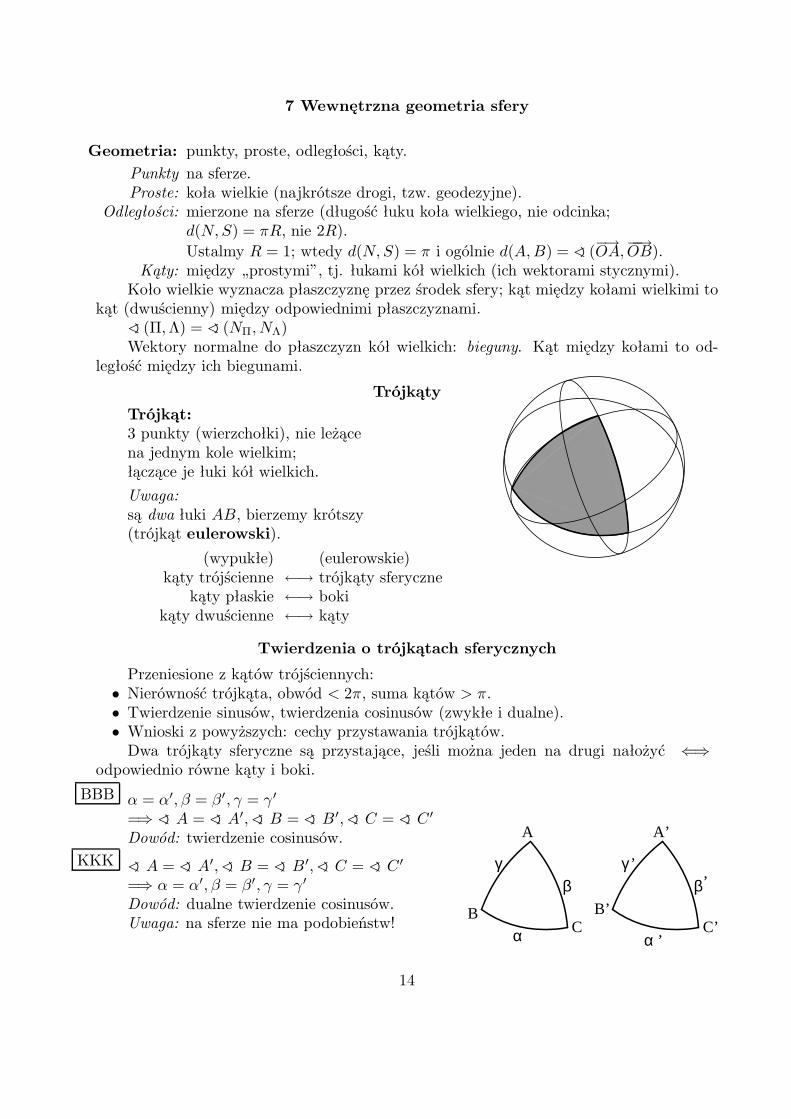
TrójkątyTrójkąt:3 punkty (wierzchołki), nie leżącena jednym kole wielkim;łączące je łuki kół wielkich.
Uwaga:
są dwa łuki AB, bierzemy krótszy(trójkąt eulerowski).
(wypukłe) (eulerowskie)kąty trójścienne ←→ trójkąty sferycznekąty płaskie ←→ boki
kąty dwuścienne ←→ kąty
Twierdzenia o trójkątach sferycznych
Przeniesione z kątów trójściennych:• Nierówność trójkąta, obwód < 2π, suma kątów > π.• Twierdzenie sinusów, twierdzenia cosinusów (zwykłe i dualne).• Wnioski z powyższych: cechy przystawania trójkątów.Dwa trójkąty sferyczne są przystające, jeśli można jeden na drugi nałożyć ⇐⇒
odpowiednio równe kąty i boki.
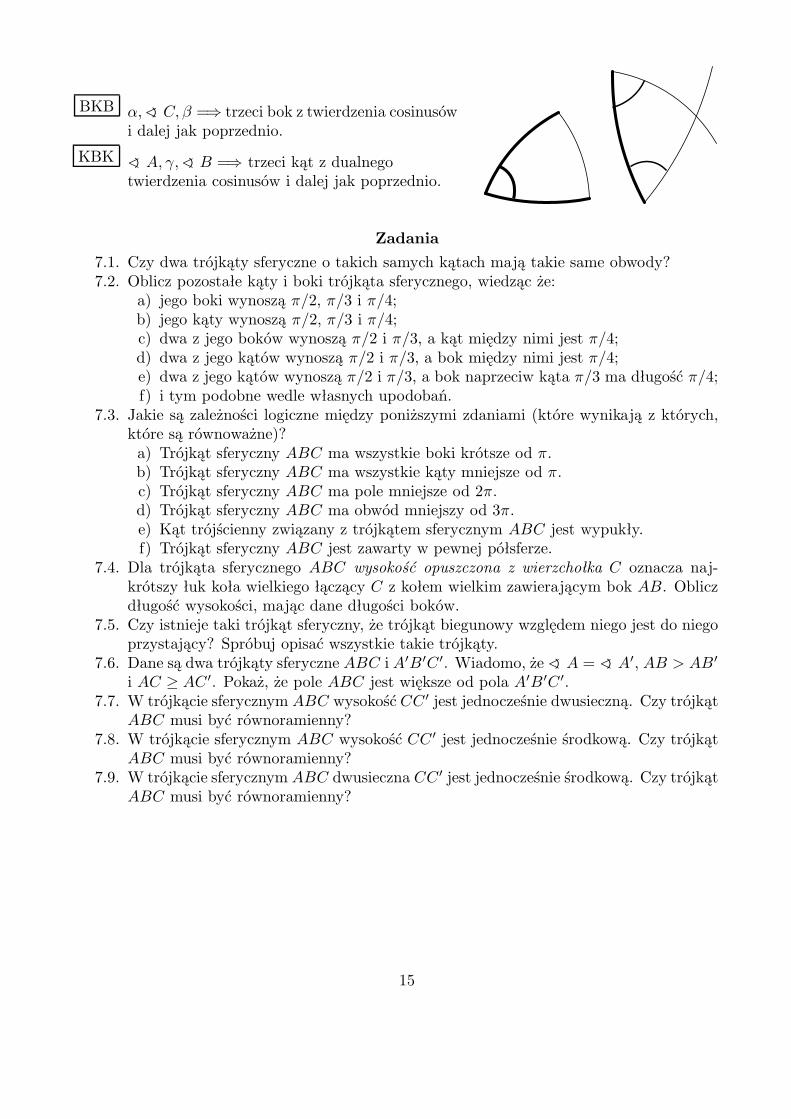
BBB α = α′, β = β′, γ = γ′
=⇒ <) A = <) A′, <) B = <) B′, <) C = <) C′
Dowód: twierdzenie cosinusów.KKK <) A = <) A′, <) B = <) B′, <) C = <) C′
=⇒ α = α′, β = β′, γ = γ′
Dowód: dualne twierdzenie cosinusów.Uwaga: na sferze nie ma podobieństw!
α
βγ
A
CB
β
A’
C’B’
’
’α
γ ’
14
BKB α, <) C, β =⇒ trzeci bok z twierdzenia cosinusówi dalej jak poprzednio.
KBK <) A, γ, <) B =⇒ trzeci kąt z dualnegotwierdzenia cosinusów i dalej jak poprzednio.
Zadania
7.1. Czy dwa trójkąty sferyczne o takich samych kątach mają takie same obwody?7.2. Oblicz pozostałe kąty i boki trójkąta sferycznego, wiedząc że:
a) jego boki wynoszą π/2, π/3 i π/4;b) jego kąty wynoszą π/2, π/3 i π/4;c) dwa z jego boków wynoszą π/2 i π/3, a kąt między nimi jest π/4;d) dwa z jego kątów wynoszą π/2 i π/3, a bok między nimi jest π/4;e) dwa z jego kątów wynoszą π/2 i π/3, a bok naprzeciw kąta π/3 ma długość π/4;f) i tym podobne wedle własnych upodobań.
7.3. Jakie są zależności logiczne między poniższymi zdaniami (które wynikają z których,które są równoważne)?a) Trójkąt sferyczny ABC ma wszystkie boki krótsze od π.b) Trójkąt sferyczny ABC ma wszystkie kąty mniejsze od π.c) Trójkąt sferyczny ABC ma pole mniejsze od 2π.d) Trójkąt sferyczny ABC ma obwód mniejszy od 3π.e) Kąt trójścienny związany z trójkątem sferycznym ABC jest wypukły.f) Trójkąt sferyczny ABC jest zawarty w pewnej półsferze.
7.4. Dla trójkąta sferycznego ABC wysokość opuszczona z wierzchołka C oznacza naj-krótszy łuk koła wielkiego łączący C z kołem wielkim zawierającym bok AB. Obliczdługość wysokości, mając dane długości boków.
7.5. Czy istnieje taki trójkąt sferyczny, że trójkąt biegunowy względem niego jest do niegoprzystający? Spróbuj opisać wszystkie takie trójkąty.
7.6. Dane są dwa trójkąty sferyczne ABC i A′B′C′. Wiadomo, że <) A = <) A′, AB > AB′
i AC ≥ AC′. Pokaż, że pole ABC jest większe od pola A′B′C′.7.7. W trójkącie sferycznym ABC wysokość CC′ jest jednocześnie dwusieczną. Czy trójkąt
ABC musi być równoramienny?7.8. W trójkącie sferycznym ABC wysokość CC′ jest jednocześnie środkową. Czy trójkąt
ABC musi być równoramienny?7.9. W trójkącie sferycznym ABC dwusieczna CC′ jest jednocześnie środkową. Czy trójkąt
ABC musi być równoramienny?
15

8 Pola wielokątów sferycznych
Zakładamy promień sfery R = 1. Pole obszaru na sferze = kąt bryłowy (ogólnie:Pole = R · kąt bryłowy). Jednostka: steradian (kąt bryłowy pełny ma 4π steradianów).
Pole dwukąta o kącie A:
=A
2π· 4π = 2A
(pole pary dwukątów = 4A)
Trójkąt jako przekrój dwukątów:4A + 4B + 4C = 4π + 4 · PoleABC
PoleABC = A + B + C − π︸ ︷︷ ︸
defekttrójkątasferycznego
A
Twierdenie Brożka:
Pole n-kąta sferycznego (niekoniecznie wypukłego) o kątach A1, A2, . . . , An jest równedefektowi tego wielokąta Defekt(W ) = cA1 + A2 + · · ·+ An − (n− 2)π.
Cn−2 Cn−3
A
B
C1
C2
A
A
A
An−2n−3
21
B
Cn
1C’C1
2C2C’
Cn−3−3nC’−2
Dowód(dla wielokąta wypukłego;ogólny przypadek nastręcza trudności technicznych).
Wybieramy jeden wierzchołek wielokąta A,łączymy przekątnymi (łukami kół wielkich)z pozostałymi wierzchołkami (B, C1, . . . , Cn−2).
Defekt wielokąta: Defekt(W ) == A + B + C1 + C2 + · · ·+ Cn−2 − (n− 2)π == (A1 + A2 + · · ·+ An−2) + B + (C1 + C′
1)++(C2 + C′
2) + · · ·+ (Cn−3 + C′n−3) + Cn−2 − (n− 2)π =
= (A1 + B + C1)− π + (A2 + C′1 + C2)− π + · · ·+ (An−2 + C′
n−3 + Cn−2)− π == Defekt(ABC1) +Defekt(AC1C2) + · · ·+Defekt(ACn−3Cn−2) == suma pól trójkątów = pole wielokąta.
Przykład: pole trójkąta prostokątnego.• sin
(Defekt(ABC)
)= sin(A + B + C − π) = − sin(A + B + C) =
= − sin(A + B + π/2) = − cos(A + B) = sinA sinB − cosA cosBZ twierdzenia cosinusów:cosC = − cosA cosB + sinA sinB cos γ, cosC = 0,=⇒ − cosA cosB = − sinA sinB cos γ.
• sin(Defekt(ABC)
)= sinA sinB (1− cos γ)
π/2αB
γ β
A
C
16

Z twierdzenia sinusów:sinα
sinA=sin γ
sinC=⇒ sinA =
sinα
sin γ, podobnie sinB =
sinβ
sin γ
• sin(Defekt(ABC)
)= sinA sinB (1− cos γ) =
sinα sinβ
sin2 γ(1− cos γ) =
= sinα sinβ1− cos γ1− cos2 γ
=sinα sinβ
1 + cos γ
Z dualnego twierdzenia cosinusów: cos γ = cosα cosβ + sinα sinβ cosC = cosα cosβ.
• sin(Defekt(ABC)
)=sinα sinβ
1 + cos γ=sinα sinβ
1 + cosα cosβ
Uwaga: gdy α, β →∞ (trójkat coraz mniejszy),pole △ sferycznegopole △ euklidesowego =
sinα sinβ/(1 + cosα cosβ)
αβ/2=sinα
α
sinβ
β
2
1 + cosα cosβ→ 1
Zadania
8.1. Kąty trójkąta sferycznego wynoszą π/2, π/3 i π/4. Jakie jest jego pole?8.2. Dwa kąty trójkąta sferycznego wynoszą π/3 i π/4, a jego pole jest równe π/2. Ilewynosi trzeci kąt?
8.3. Czy dwa trójkąty sferyczne o tej samej podstawie i długości wysokości muszą miećrówne pola?
8.4. Czy dwa trójkąty sferyczne o równych polach mają takie same obwody?8.5. Wysokość CC′ dzieli trójkąt sferyczny ABC na dwa trójkąty o równych polach. Czytrójkąt ABC musi być równoramienny?
8.6. Dwusieczna CC′ dzieli trójkąt sferyczny ABC na dwa trójkąty o równych polach. Czytrójkąt ABC musi być równoramienny?
8.7. Środkowa CC′ dzieli trójkąt sferyczny ABC na dwa trójkąty o równych polach. Czytrójkąt ABC musi być równoramienny?
8.8. Wielokąt sferyczny nazywamy foremnym, jeżeli ma równe wszystkie boki i równewszystkie kąty. Wyznacz miary kątów oraz obwód n-kąta foremnego jako funkcjepola. (Rozpatrz zwłaszcza przypadki n = 3, 4, 5.) Jakie są przedziały zmiennościmiar kątów i obwodu?
17
9 Twierdzenie Cevy
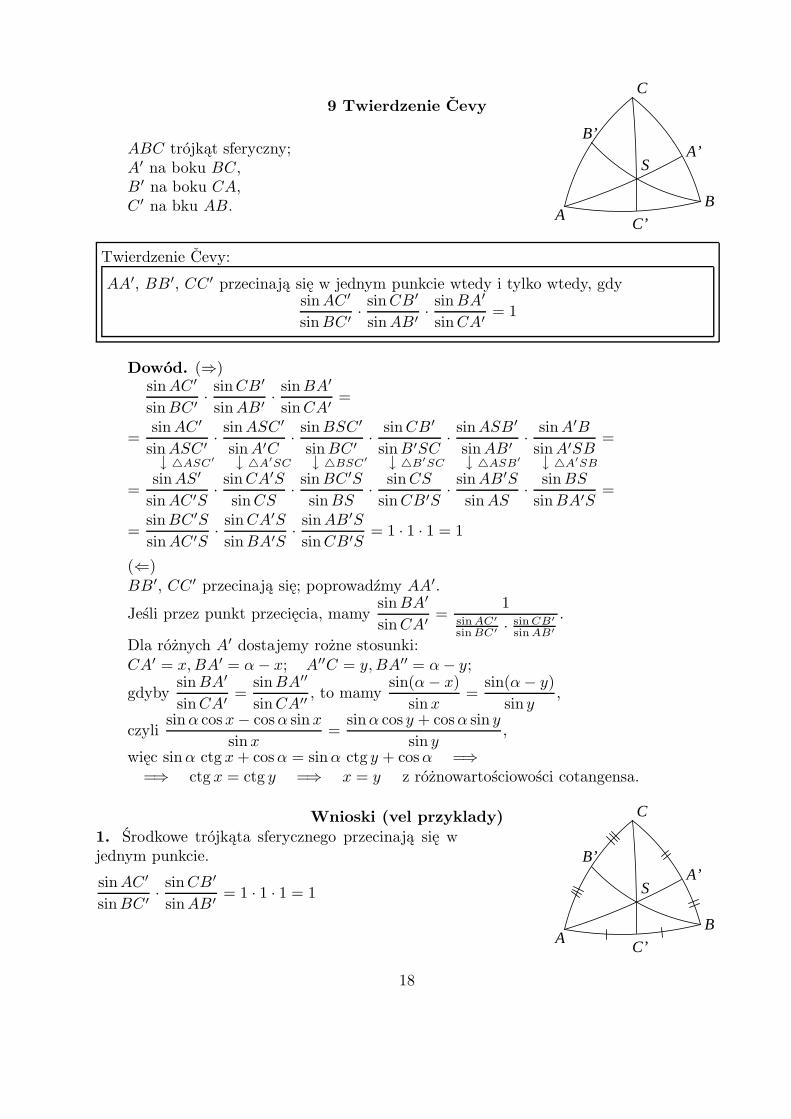
ABC trójkąt sferyczny;A′ na boku BC,B′ na boku CA,C′ na bku AB.
AC’
B
A’
C
B’
S
Twierdzenie Cevy:
AA′, BB′, CC′ przecinają się w jednym punkcie wtedy i tylko wtedy, gdysinAC′
sinBC′· sinCB′
sinAB′· sinBA′
sinCA′= 1
Dowód. (⇒)sinAC′
sinBC′· sinCB′
sinAB′· sinBA′
sinCA′=
=sinAC′
sinASC′· sinASC′
sinA′C· sinBSC′
sinBC′· sinCB′
sinB′SC· sinASB′
sinAB′· sinA′B
sinA′SB=
↓ △ASC′ ↓ △A′SC ↓ △BSC′ ↓ △B′SC ↓ △ASB′ ↓ △A′SB
=sinAS′
sinAC′S· sinCA′S
sinCS· sinBC′S
sinBS· sinCS
sinCB′S· sinAB′S
sinAS· sinBS
sinBA′S=
=sinBC′S
sinAC′S· sinCA′S
sinBA′S· sinAB′S
sinCB′S= 1 · 1 · 1 = 1
(⇐)BB′, CC′ przecinają się; poprowadźmy AA′.
Jeśli przez punkt przecięcia, mamysinBA′
sinCA′=
1sinAC′
sinBC′· sinCB′
sinAB′
.
Dla różnych A′ dostajemy rożne stosunki:CA′ = x, BA′ = α− x; A′′C = y, BA′′ = α− y;
gdybysinBA′
sinCA′=sinBA′′
sinCA′′, to mamy
sin(α− x)
sinx=sin(α− y)
sin y,
czylisinα cosx− cosα sinx
sinx=sinα cos y + cosα sin y
sin y,
więc sinα ctg x + cosα = sinα ctg y + cosα =⇒=⇒ ctg x = ctg y =⇒ x = y z różnowartościowości cotangensa.
Wnioski (vel przyklady)1. Środkowe trójkąta sferycznego przecinają się wjednym punkcie.
sinAC′
sinBC′· sinCB′
sinAB′= 1 · 1 · 1 = 1
AC’
B
A’
C
B’
S
18
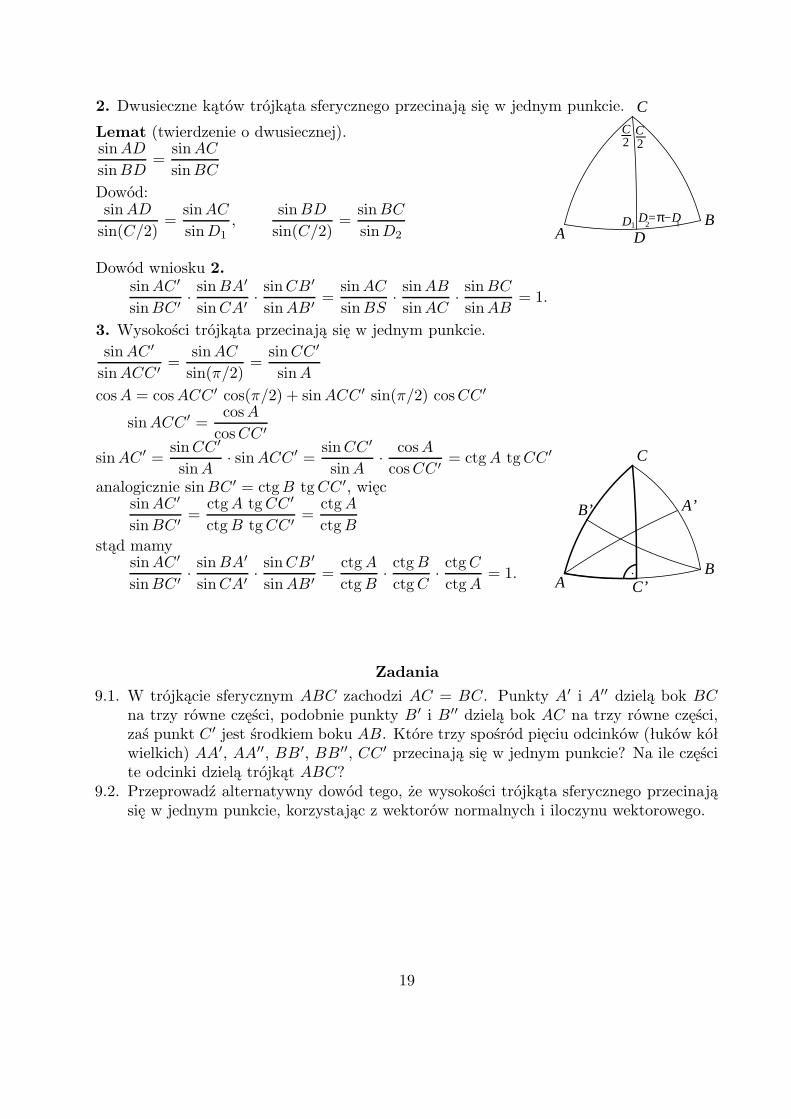
2. Dwusieczne kątów trójkąta sferycznego przecinają się w jednym punkcie.
Lemat (twierdzenie o dwusiecznej).sinAD
sinBD=sinAC
sinBC
Dowód:sinAD
sin(C/2)=sinAC
sinD1,
sinBD
sin(C/2)=sinBC
sinD2 AB
C
DD1
D=π−D2 1
C C_ _2 2
Dowód wniosku 2.sinAC′
sinBC′· sinBA′
sinCA′· sinCB′
sinAB′=sinAC
sinBS· sinAB
sinAC· sinBC
sinAB= 1.
3. Wysokości trójkąta przecinają się w jednym punkcie.sinAC′
sinACC′=sinAC
sin(π/2)=sinCC′
sinA
cosA = cosACC′ cos(π/2) + sinACC′ sin(π/2) cosCC′
sinACC′ =cosAcosCC′
sinAC′ =sinCC′
sinA· sinACC′ =
sinCC′
sinA· cosAcosCC′
= ctgA tgCC′
analogicznie sinBC′ = ctgB tgCC′, więcsinAC′
sinBC′=ctgA tgCC′
ctgB tgCC′=ctgActgB
stąd mamysinAC′
sinBC′· sinBA′
sinCA′· sinCB′
sinAB′=ctgActgB
· ctgBctgC
· ctgCctgA
= 1.A
B
C
A’B’
C’
Zadania
9.1. W trójkącie sferycznym ABC zachodzi AC = BC. Punkty A′ i A′′ dzielą bok BCna trzy równe części, podobnie punkty B′ i B′′ dzielą bok AC na trzy równe części,zaś punkt C′ jest środkiem boku AB. Które trzy spośród pięciu odcinków (łuków kółwielkich) AA′, AA′′, BB′, BB′′, CC′ przecinają się w jednym punkcie? Na ile częścite odcinki dzielą trójkąt ABC?
9.2. Przeprowadź alternatywny dowód tego, że wysokości trójkąta sferycznego przecinająsię w jednym punkcie, korzystając z wektorów normalnych i iloczynu wektorowego.
19
10 Dygresja: współrzędne geograficzne
Ustalone koło wielkie (równik) i jego bieguny N i S.
Szerokość geograficzna:
Szerokość geograficzna φ(X) punktu X na sferze to kąt między wektorem−−→OX a
płaszczyzną równika. −90◦ ≤ φ ≤ 90◦
Umowa: zamiast −a◦ piszemy a◦S, zamiast a◦ piszemy a◦N .
Zbiór punktów o ustalonej szerokości geograficznej to równoleżnik. Równoleżnik jestokręgiem powstałym z przecięcia sfery płaszczyzną równoległą do równika.
Fakt. Równoleżnik jest okręgiem w geometrii sferycznej (o środku w biegunie).
Dowód. d(X, N) = 90◦ − φ(X).
Ustalamy półpłaszczyznę o krawędzi NS (południk zerowy).
Długość geograficzna:
Długość geograficzna θ punktu X to zorientowany kąt między półpłaszczyzną okrawędzi NS przechodzącą przez punkt X a półpłaszczyzną południka zerowego.
−180◦ ≤ θ ≤ 180◦
Umowa: zamiast −b◦ piszemy b◦E, zamiast b◦ piszemy b◦W .
Zbiór punktów o ustalonej długości geograficznej to południk. Południk jest pół-okręgiem; południki b◦E i (180− b)◦W tworzą razem koło wielkie.
Zadania
10.1. Wyprowadź wzór na odległość (sferyczną) dwóch punktów o danych współrzędnychgeograficznych.
10.2. Sprawdź w atlasie, czy najkrótsza droga z Warszawy do Honolulu prowadzi przezBiegun Północny.
10.3. Pokaż, że na każdym trójkącie sferycznym można opisać okrąg.
20
11 Bryły obrotowe: pola i objętości
Objętość kuli
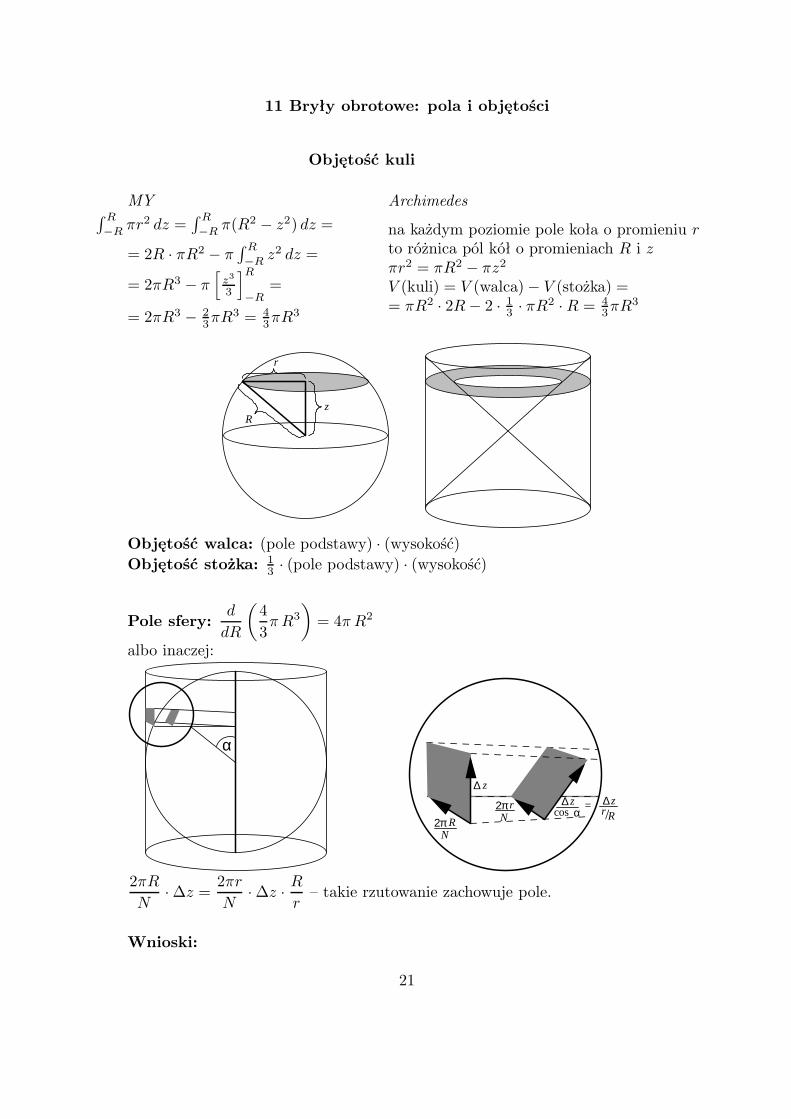
MY∫ R
−Rπr2 dz =
∫ R
−Rπ(R2 − z2) dz =
= 2R · πR2 − π∫ R
−Rz2 dz =
= 2πR3 − π[
z3
3
]R
−R=
= 2πR3 − 23πR3 = 4
3πR3
Archimedes
na każdym poziomie pole koła o promieniu rto różnica pól kół o promieniach R i zπr2 = πR2 − πz2
V (kuli) = V (walca)− V (stożka) == πR2 · 2R− 2 · 1
3 · πR2 ·R = 43πR3
z
r
R
Objętość walca: (pole podstawy) · (wysokość)Objętość stożka: 1
3· (pole podstawy) · (wysokość)
Pole sfery:d
dR
(4
3π R3
)
= 4π R2
albo inaczej:
α
2πR
∆ z
2πrN
N
∆ zcos α
= ∆zr/R
2πR
N·∆z =
2πr
N·∆z · R
r– takie rzutowanie zachowuje pole.
Wnioski:
21
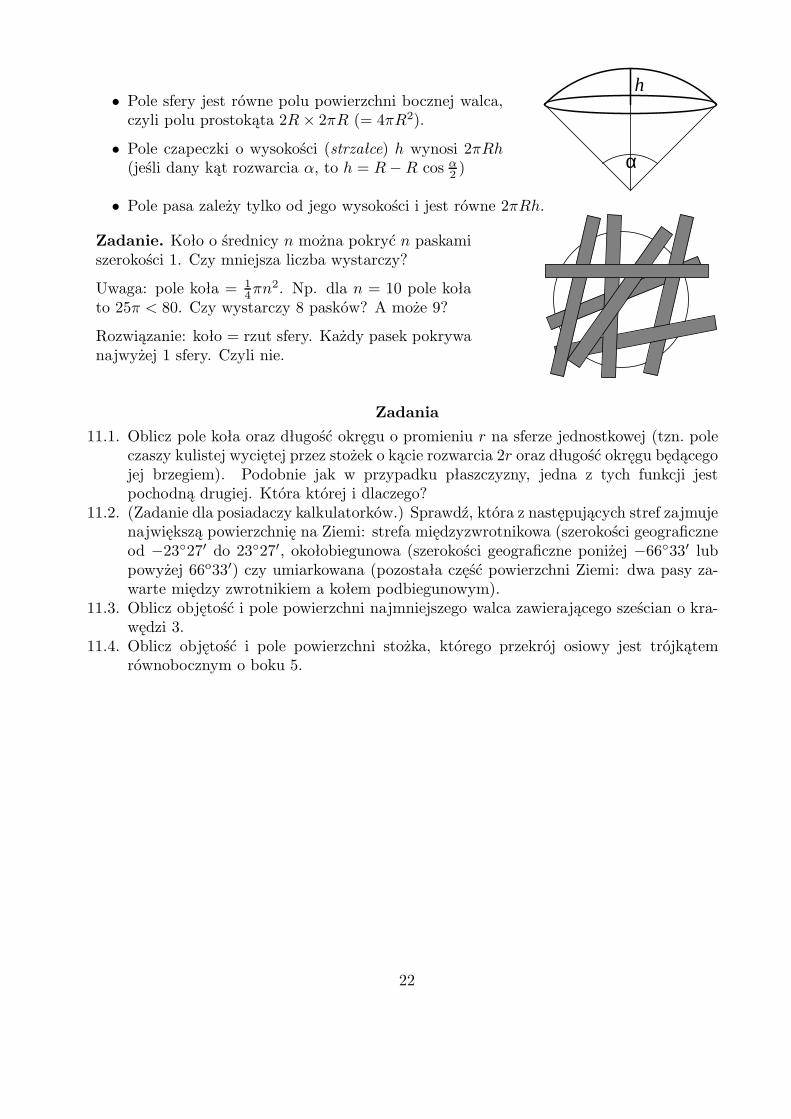
• Pole sfery jest równe polu powierzchni bocznej walca,czyli polu prostokąta 2R × 2πR (= 4πR2).
• Pole czapeczki o wysokości (strzałce) h wynosi 2πRh(jeśli dany kąt rozwarcia α, to h = R−R cos α
2 )α
h
• Pole pasa zależy tylko od jego wysokości i jest równe 2πRh.
Zadanie. Koło o średnicy n można pokryć n paskamiszerokości 1. Czy mniejsza liczba wystarczy?
Uwaga: pole koła = 14πn2. Np. dla n = 10 pole koła
to 25π < 80. Czy wystarczy 8 pasków? A może 9?
Rozwiązanie: koło = rzut sfery. Każdy pasek pokrywanajwyżej 1 sfery. Czyli nie.
Zadania
11.1. Oblicz pole koła oraz długość okręgu o promieniu r na sferze jednostkowej (tzn. poleczaszy kulistej wyciętej przez stożek o kącie rozwarcia 2r oraz długość okręgu będącegojej brzegiem). Podobnie jak w przypadku płaszczyzny, jedna z tych funkcji jestpochodną drugiej. Która której i dlaczego?
11.2. (Zadanie dla posiadaczy kalkulatorków.) Sprawdź, która z następujących stref zajmujenajwiększą powierzchnię na Ziemi: strefa międzyzwrotnikowa (szerokości geograficzneod −23◦27′ do 23◦27′, okołobiegunowa (szerokości geograficzne poniżej −66◦33′ lubpowyżej 66o33′) czy umiarkowana (pozostała część powierzchni Ziemi: dwa pasy za-warte między zwrotnikiem a kołem podbiegunowym).
11.3. Oblicz objętość i pole powierzchni najmniejszego walca zawierającego sześcian o kra-wędzi 3.
11.4. Oblicz objętość i pole powierzchni stożka, którego przekrój osiowy jest trójkątemrównobocznym o boku 5.
22

12 Bryły obrotowe: przekroje
Dlaczego bryły obrotowe?Sfera powstaje przez obrót okręgu wokół średnicy.Walec powstaje przez obrót prostej wokól prostej do niej równoległej.Stożek powstaje przez obrót prostej wokół prostej ją przecinającej.
Przekroje walca
a) poziome: koło (okrąg)b) pionowe: prostokąt / odcinek / pasc) ukośne: elipsa
sfery Dandelina: wpisane w walec, styczne dopłaszczyzny przekroju|PT1| =
√
|PS1|2 − |T1S1|2 =√
|PS1|2 − r2
|PT2| =√
|PS2|2 − |T2S2|2 =√
|PS2|2 − r2
|PT1|+ |PT2| = |S1S2|
T1
2T
P
S
S1
2
Przekroje stożka
P
S
T
S1
1T
2
2
P
P
1
2
a) poziome: koło (okrąg)b) przez wierzchołek: kątc) ukośne, o nachyleniu mniejszym niż na-chylenie tworzącej: elipsa
jak poprzednio:|PT1| =
√
|PS1|2 − r2
|PT2| =√
|PS2|2 − r2
|PT1|+ |PT2| = |P1P2|Analogicznie pokazuje się, że przekrój stożkapłaszczyzną o nachyleniu większym od nachy-lenia tworzącej jest hiperbolą.
Natomiast przekrój stożka płaszczyzną onachyleniu równym nachyleniu tworzącej jestparabola.
|PT |2 = |PS|2 − r2 = |PP ′|2
=d(P, π)
sinα= d(P, Π \ Γ)
P’S
T
P
23

Pytanie: Co powstaje z obracania prostej wokół prostej skośnej?Odpowiedź: Hiperboloida jednopowłokowa o równych półosiach a i b.
Ogólnie:x2
a2+
y2
b2− z2
c2= 1
y2
b2− z2
c2= 1− x2
a2(y
b− z
c
) (y
b+
z
c
)
=(
1− x
a
)(
1 +x
a
)
yb − z
c
1− xa
=1 + x
ayb
+ zc
=: p (parametr)
y
b− z
c= p
(
1− x
a
)
(płaszczyzna)
1 +x
a= p
(y
b+
z
c
)
(płaszczyzna)
=⇒ równanie krawędziowe prostej (po jednej dla każdego parametru).
Ale uwaga: można było napisaćyb− z
c
1 + xa
=1− x
ayb + z
c
=: q
=⇒ druga rodzina prostych.Jeśli przez każdy punkt powierzchni można poprowadzić prostą zawartą w tej powierzchni,to taką powierzchnię nazywamy prostokreślną.Stożek (cały) i walec też są prostokreślne.
Stożek i walec jako graniczne przypadki hiperboloidy:
a = t, b = t, =t/r, t→∞ :x2
t2+
y2
t2− r2z2
t2= 1
x2 + y2 = r2z2 + 1/t2 −→
t→∞x2 + y2 = r2z2
a = r, b = r, =rt, t→∞ :x2
r2+
y2
r2− z2
r2t2= 1
x2 + y2 = z2/t2
+ r2 −→t→∞
x2 + y2 = r2
Zadania
12.1. Pokaż, że dwa okręgi przecinające się w dwu punktach leżą na jednej sferze.12.2. Uzupełnij klasyfikację przekrojów stożka o przypadek hiperboli.12.3. Dwie sfery o promieniach R1 i R2 są styczne do siebie nawzajem, a także do płasz-
czyzny Π. Niech A i B będą punktami styczności sfer i płaszczyzny. Znajdź d(A, B).12.4. Znajdź kąt (pół)rozwarcia stożka opisanego na dwu stycznych sferach o danych pro-
mieniach.12.5. Czy dowolna hiperboloida jednopowłokowa ma przekrój będący okręgiem?
Wskazówka: zbadaj przekrój hiperboloidy sferą o promieniu równym dłuższej półosi.12.6. Uzasadnij (bez żadnych rachunków) że ani elipsoida, ani hiperboloida dwupowłokowa
nie są prostokreślne.
24

13 Bryły obrotowe: siatki
Stożek i walec są nie tylko prostokreślne, są rozwijalne (lokalna geometria taka jakna płaszczyźnie ⇐⇒ można zrobić model z nierozciągliwej kartki papieru).Walec – łatwe: zwijamy w rulon. Siatka – pas o szerokości 2πr.
Stożek – kąt rozwarcia a kąt siatki:
Kąt rozwarcia α dla stożka x2 + y2 = r2z2: cosα =1
R=
1
1 + r2
Kąt siatki β dla tego stożka: βR = 2πr =⇒ β =2πr√1 + r2
= 2π sinα
π2 r
π2 rr
R
α
1
β
R
Sfera ani hiperboloida nie są rozwijalne: nie da się zrobić siatek.
Zadania
13.1. Wyprowadź wzór na pole powierzchni stożka o zadanym promieniu podstawy i wyso-kości.
13.2. Mikołajek robi z papieru zabawki choinkowe w formie sześciu stożków o wspólnymwierzchołku sklejonych wzdłuż tworzących, w ten sposób, że podstawy stożków sąkołami wpisanymi w ściany sześcianu o boku 10 cm. Ile papieru potrzebuje na jednązabawkę? (Ile kartek A4?)
25

14 Izometrie liniowe
Cel: uściślić pojęcie „takich samych” obiektów.Przystające ⇐⇒ „można nałożyc” przez izometrię.
Izometria:
F : R3 → R3 takie że ∀X, Y d(F (X), F (Y )
)= d(X, Y )
Uwagi:— Pojęcie izometrii ma sens w dowolnych przestrzeniach metrycznych— Izometria jest zawsze 1-1 (oczywiście) i „na” (w R3 fakt, ogólnie część definicji.
Przykłady izometrii R3
przesunięcie symetria (płaszczyznowa)obrót wokół osi symetria środkowaw tym: symetria osiowa (obrót o π) symetria z poślizgiem
Klasyfikacja izometrii R3
A. Izometrie liniowe (przypomnienie z algebry liniowej)
Izometrie liniowe:
Liniowa izometria R3 zachowuje 0. Każda izometria R3 zachowująca 0 jest liniowa.
Dowód. AB = {X : |AX |+ |XB|+ |AB|} =⇒ izometrie zachowują proste.0, X, tX leżą na prostej =⇒ F (0) = 0, F (x), F (tX) leżą na prostej
=⇒ F (tX) = s F (X)|s F (X)| = |F (tX)| = d
(F (0), F (tX)
)= d(0, tX) = |tX | = |t F (X)| =⇒ s = t
=⇒ izometrie zachowujące 0 są jednorodne.Izometrie zachowują kąty:kąt w trójkącie daje się wyliczyć z długości boków (twierdzenie cosinusów)
=⇒ izometrie zachowują przekątne równoległoboków =⇒ są addytywne.
Przekształcenie liniowe R3 ma wektor własny. Izometria =⇒ wartość własna ±1.
+1
F (X) = X , ΠX – płaszczyzna ⊥ do X ,F |ΠX
– liniowa izometria R2
a) F |ΠX– obrót =⇒
F – obrót wokół osi wyznaczonej przez X .b) F |ΠX
– symetria względem 0Y =⇒F – symetria względem płaszczyzny 0XY .
−1
F (X) = −X , ΠX – płaszczyzna ⊥ do X ,F |ΠX
– liniowa izometria R2
a) F |ΠX– obrót =⇒
F – „symetria obrotowa” (gdy o kąt π –symetria środkowa)b) F |ΠX
– symetria względem 0Y =⇒F – obrót o π wokół 0Y .
26

Symetria płaszczyznowa• jest inwolucją: SΠ ◦ SΠ = Id;• wystarczy podać płaszczyznę:– jeśli przez 0 – dwuparametrowa rodzina,– jeśli niekoniecznie – trójparametrowa;
• zmienia orientację (wyznacznik),Obrót wokół osi• jest inwolucją gdy kąt = π (symetria osiowa);• trzeba podać oś i kąt, ale uwaga na kierunek obrotu;• lepiej: oś zorientowana (wektor) i kąt: Rα
U
• zachowuje orientację.Symetria obrotowa• jest inwolucją gdy kąt = 0 (symetria płaszczyznowa) lub +π (symetria środkowa);• trzeba podać:– kąt, oś (zorientowaną) i płaszczyznę symetrii (prostopadłą, więc wystarczy punktna osi), albo– kąt, płaszczyznę, punkt na niej i wektor (swobodny) prostopadły do niej;
• zmienia orientację.
Uwaga: Powyższa lista opisuje wszystkie izometrie z punktem stałym.
Zadania
14.1. Podaj przykład dwóch izometrii, które komutują (mówimy, że odwzorowania F i Gkomutują, jeżeli F ◦G = G ◦ F ) oraz dwóch takich, które nie komutują.
14.2. Pokaż, że izometrie przeprowadzają (proste w proste – było), płaszczyzny w płasz-czyzny, sfery w sfery i okręgi w okręgi.
14.3. Pokaż, że izometrie zachowują odległości punktu od prostej lub płaszczyzny, międzyprostymi, między płaszczyznami, pola, objetości, miary kątów (płaskich – było), dwu-ściennych, kątów między prostą a płaszczyzną itp. Spróbuj wymyślić coś, czego izome-trie nie zachowują.
14.4. Jakiego typu izometria liniowa przeprowadza punkt (x, y, z) na punkt:a) (x, y,−z) b) (−y, x, z) c) (x,−y,−z) d) (y, z, x) e) (−x,−y,−z)f) (−y, x,−z) g) (y,−z, x) h) (y,−z,−x) i) (z, y, x) j) (x, y, z)?
27

15 Izometrie nieliniowe
Izometrie bez punktu stałego:• translacje;• złożenia liniowych z translacjami.Każda izometria zapisuje się jako złożenie izometrii liniowej z translacją:F = T−−−→
0F (0)◦ Flin (gdzie Flin = T−−−→
F (0)0◦ F ).
Złożenie obrotu z translacją: TV ◦RαU = Tpr
U(V ) ◦ TV −pr
U(V ) ◦Rα
prU
(V )︸ ︷︷ ︸
• w każdej płaszczyźnie prostopadłej do U złożenie obrotu z przesunięciem: obrót!
Ruch śrubowy:
Złożenie TU ◦ RαU obrotu wokół osi z translacją w kierunku wektora równoległego do
tej osi nazywamy ruchem śrubowym.
Uwagi:• TU ◦Rα
U = RαU ◦ TU , ogólnie to nie jest prawda;
• ruch śrubowy ma punkt stały ⇐⇒ jest obrotem.
Złożenie symetrii z translacją: TV ◦ SΠ = TprΠ
(V ) ◦ TV −prΠ
(V ) ◦ SΠ︸ ︷︷ ︸
• symetria w płaszczyźnie przesuniętej o(V − prΠ(V )
)/2
Symetria z poślizgiem:
Złożenie TVΠ◦SΠ symetrii płaszczyznowej z przesunięciem w kierunku pewnego wektora
równoległego do tej płaszczyzny nazywamy symetrią z poślizgiem.
Uwagi:• TVΠ
◦ SΠ = SΠ ◦ TVΠ, ogólnie to nie jest prawda;
• symetria z poślizgiem ma punkt stały ⇐⇒ jest symetrią.
Złożenie symetrii obrotowej z translacją:TV ◦Rα
P ◦ SΠ︸ ︷︷ ︸
= TV −VΠ◦TVΠ
◦RαP
︸ ︷︷ ︸◦SΠ = TV −VΠ
◦RαP ′
︸ ︷︷ ︸◦SΠ = Rα
P ′◦TV −VΠ◦ SΠ
︸ ︷︷ ︸= Rα
P ′ ◦ SΠ′
︸ ︷︷ ︸
gdzie P⊥Π obrót! RαP ′ ruch symetria względem symetria
(symetria obrotowa) P ′ ⊥ Π śrubowy przesuniętej płaszczyzny obrotowa
To znaczy, że TV ◦RαP ◦ SΠ ma punkt stały. Jak go znaleźć?
28
S (
X
X)Π (X)S Π oR
αP
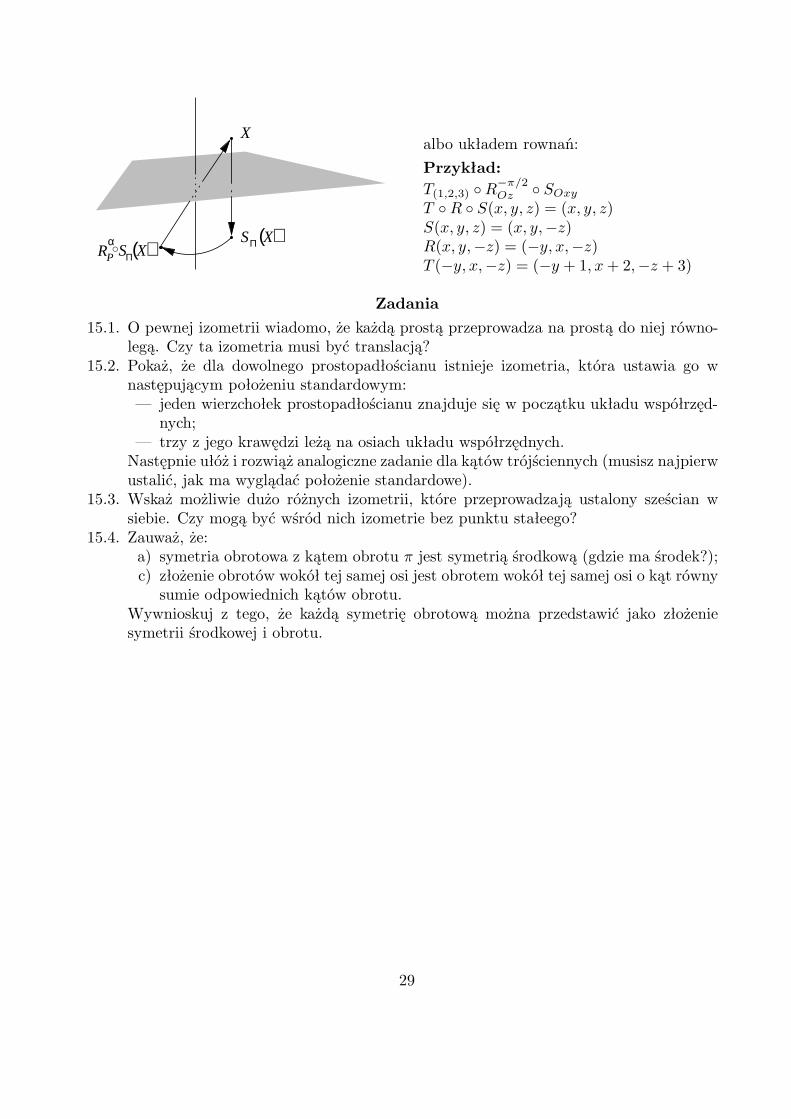
albo układem rownań:
Przykład:T(1,2,3) ◦R
−π/2Oz ◦ SOxy
T ◦R ◦ S(x, y, z) = (x, y, z)S(x, y, z) = (x, y,−z)R(x, y,−z) = (−y, x,−z)T (−y, x,−z) = (−y + 1, x + 2,−z + 3)
Zadania
15.1. O pewnej izometrii wiadomo, że każdą prostą przeprowadza na prostą do niej równo-legą. Czy ta izometria musi być translacją?
15.2. Pokaż, że dla dowolnego prostopadłościanu istnieje izometria, która ustawia go wnastępującym położeniu standardowym:— jeden wierzchołek prostopadłościanu znajduje się w początku układu współrzęd-nych;
— trzy z jego krawędzi leżą na osiach układu współrzędnych.Następnie ułóż i rozwiąż analogiczne zadanie dla kątów trójściennych (musisz najpierwustalić, jak ma wyglądać położenie standardowe).
15.3. Wskaż możliwie dużo różnych izometrii, które przeprowadzają ustalony sześcian wsiebie. Czy mogą być wśród nich izometrie bez punktu stałeego?
15.4. Zauważ, że:a) symetria obrotowa z kątem obrotu π jest symetrią środkową (gdzie ma środek?);c) złożenie obrotów wokół tej samej osi jest obrotem wokół tej samej osi o kąt równysumie odpowiednich kątów obrotu.
Wywnioskuj z tego, że każdą symetrię obrotową można przedstawić jako złożeniesymetrii środkowej i obrotu.
29

16 Twierdzenie o czterech odbiciach
Twierdzenie o czterech odbiciach:
Każda izometria R3 jest złożeniem ≤ 4 symetrii płaszczyznowych.(liniowa) (≤ 3)
Dowód.
Lemat o czterech punktach:
Obrazy czterech niewspółpłaszczyznowych punktów wyznaczają izometrię.
F, G : A, B, C, D 7→ A′, B′, C′, D′ =⇒ G−1 ◦ F (ABCD) = ABCD.G−1 ◦ F (A) = A =⇒ G−1 ◦ F obrót, symetria lub symetria obrotowa— w każdym przypadku A, B, C, D współpłaszczyznowe.
Rozkład na odbicia. F : A, B, C, D 7→ A′, B′, C′, D′
a) Czy A = A′?TAK: przejdź do b) z Ba = B, Ca = C, Da = D.NIE: A – płaszczyzna symetralna AA′; SA(ABCD) = A′BaCaDa.
b) Czy Ba = B′?TAK: przejdź do c) z Cb = Ca, Db = Da.NIE: B – płaszczyzna symetralna BaB′; B przechodzi przez A′, bo A′Ba = AB = A′B′;
SB(A′BaCaDa) = A′B′CbDb.
c) Czy Cb = C′?TAK: przejdź do d) z Dc = Db.NIE: C – płaszczyzna symetralna CbC
′; C przechodzi przez A′, B′, bo A′Cb = A′Ca =AC = A′C′, B′Cb = BaCa = BC = B′C′; SC(A′B′CbDb) = A′B′C′Dc.
d) Czy Dc = D′?TAK: zrobione!NIE: D – płaszczyzna symetralna DcD
′; D przechodzi przez A′, B′, C′ jw.,SD(A′B′C′Dc) = A′B′C′D′, czyli SD ◦ SC ◦ SB ◦ SA(ABCD) = (A′B′C′D′).
Uwagi:• translacja jest złożeniem dwóch symetrii;• każde złożenie dwóch symetrii jest obrotem lub translacją;• symetria obrotowa jest złożeniem trzech symetrii (względem płaszczyzn przecinają-cych się w jednym punkcie);• ruch śrubowy jest złożeniem czterech symetrii (bo parzystej liczby, a nie dwóch);• symetria z poślizgiem jest złożeniem trzech symetrii (w tym dwu względem równoleg-łych płaszczyzn).
30
Zadania
16.1. Pokaż, że izometria, która ma punkt stały, jest złożeniem co najwyżej trzech symetrii.16.2. Pokaż, że izometria, która zachowuje punktowo pewną prostą, jest złożeniem co naj-
wyżej dwóch symetrii. (Uwaga: mówimy, że odwzorowanie f : X → X zachowujepunktowo zbiór K ⊂ X , jeżeli f |K (f obcięte do K) jest identycznością.)
16.3. Czym może być izometria, która zachowuje punktowo pewną płaszczyznę?16.4. Dane są cztery punkty A, B, C, D takie, że |AB| = |BC| = |CD| = |DA|. Czy z tego
wynika, że istnieje izometria, która przeprowadza A na B, B na C, C na D i D na A?
Dygresja wysokowymiarowa
16.5. Na płaszczyźnie występują dwa rodzaje „symetrii” (tj. izometrii będących inwoluc-jami):◦ symetria osiowa, która zmienia orientację, i◦ symetria środkowa, która orientację zachowuje (bo jest obrotem o π).W przestrzeni trójwymiarowej są trzy rodzaje:◦ symetria płaszczyznowa (zmieniająca orientację),◦ symetria osiowa (obrót o π) i◦ symetria środkowa.a) Czy ta ostatnia zachowuje orientację?b) Jak myślisz, ile będzie rodzajów symetrii w przestrzeni czterowymiarowej? (A ileich było na prostej?)
c) A w przestrzeni n-wymiarowej dla jakiegoś dużego n?d) Ile z nich (i które) zachowuje orientację?
16.6. Jak wygląda analog twierdzenia o czterech odbiciach w przestrzeni czterowymiarowej?A n-wymiarowej?
31

17 Składanie przekształceń
Przykład. Dwa sześciany o krawędziachrównoległych do osi, stykające się krawę-dzią. Jakie izometrie przeprowadzają jedenna drugi?
• obrót o π wokół wspólnej krawędzi,• obrót o π/2 wokół przekroju płaszczyznzawierających ściany,• przesunięcie,• ruch śrubowy wzdłuż osi symetrii,• symetria płaszczyznowa. . .
Uwagi:
1. Wszystkich izometrii przeprowadzających S1 w S2 jest 8 · 3 · 2 = 48.
Dowód. Obrazy czterech wierzchołków wyznaczają izometrię, na pierwszy 8 możliwości,na drugi 3 (sąsiednie), na trzeci 2.
2. Jeżeli {F1, F2, . . . , Fn} – wszystkie izometrie przeprowadzające sześcian S1 w siebie,G – pewna izometria preprowadzająca S1 w S2, to zbiór wszystkich izometrii prze-prowadzających S1 w S2 ma postać {G ◦ F1, G ◦ F2, . . .G ◦ Fn}.
Dowód. H : S1 → S2 =⇒ G−1 ◦H : S1 → S1 =⇒ G−1 ◦H = Fk =⇒ H =G ◦ (G−1 ◦H) = G◦Fk.
Morał: musimy umieć składać izometrie.
Tabelka składania izometriiruch śrubowy symetria
identyczność (w tym translacja, obrót) z obrotem, z poślizgiemruch śrubowy ruch śrubowy symetria(w tym translacja, obrót) (w tym tranlacja, obrót) z obrotem, z poślizgiemsymetria symetria ruch śrubowyz obrotem, z poślizgiem z obrotem, z poślizgiem (w tym translacja, obrót)Uwagi:• translacja ◦ translacja = translacja• obrót ◦ obrót = obrót tylko gdy osie leżą w jednej płaszczyźnie:
Rαp ◦Rβ
l (A) = A =⇒ Rβl (A) = A′, Rα
p (A′) = A =⇒d(A, l) = d(A′, l), d(A′, p) = d(A, p) =⇒ l, p ⊂ symetralna(AA′).
• symetria( obrotowaz poślizgiem
)◦ symetria
( obrotowaz poślizgiem
)zachowuje orientację (trans-
lacja lub obrót).• translacja ◦ symetria = symetria z poślizgiem (było).• translacja ◦ symetria z poślizgiem = symetria z poślizgiem bo Tu ◦ (Tv ◦S〈v,u〉) =
(Tu ◦ Tv) ◦ S〈v,u〉.
32

• translacja ◦ symetria obrotowa = symetria obrotowa (było).• obrót◦ symetria = symetria obrotowa o ile oś przecina płaszczyznę (punkt stały).• jeśli p∩Π = ∅, to Rα
p ◦SΠ nie ma punktu stałego, bo gdyby SΠ(A) = A′, Rαp (A′) = A,
to Π – symetralna AA′, p ⊂ symetralnej AA′.
Zadania
17.1. Czym jest złożenie dwóch symetrii obrotowych w równoległych płaszczyznach?17.2. Czym jest złożenie dwóch symetrii z poślizgiem w tej samej płaszczyźnie?17.3. Złożenie pewnych dwóch symetrii (płaszczyznowych) jest
a) translacją o wektor (−2, 0, 4);b) obrotem o π/3 wokół osi Oz;c) obrotem o π wokół prostej {(0, 0, 3) + t(0, 2, 1)}.Jakie mogą być równania tych płaszczyzn? Napisz po jednym przykładzie dla każdegopodpunktu.
17.4. Podaj przykład pięciu różnych izometrii, których złożenie (wszystkich pięciu, w pewnejkolejności) jest identycznością.
17.5. Niech Z1 i Z2 będą dwoma sześcianami o krawędziach długości1 i równoległych do osi układu współrzędnych, mającymi jedenwspólny wierzchołek (patrz rysunek). Opisz możliwie dużoizometrii przekształcających Z1 na Z2.
17.6. Zauważ, że:a) symetria obrotowa z kątem obrotu π jest symetrią środkową (gdzie ma środek?);b) złożenie obrotów wokół tej samej osi jest obrotem wokół tej samej osi o kąt równysumie odpowiednich kątów obrotu.
Wywnioskuj z tego, że każdą symetrię obrotową można przedstawić jako złożeniesymetrii środkowej i obrotu.
33

18 Grupy przekształceń
Grupa przekształceń:
Zbiór G izometrii R3 spełniający warunki:• Id ∈ G;• jeśli F ∈ G, to F−1 ∈ G;• jeśli F1 ∈ G, F2 ∈ G to F1 ◦ F2 ∈ Gnazywamy grupą przekształceń.
Przykłady.0) wszystkie izometrie;1) wszystkie translacje;1a) translacje o wektory równoległe do osi Ox;1b) translacje o wektory równoległe do płaszczyzny Oxy;1c) translacje o wektory o współrzędnych całkowitych;2) wszystkie obroty wokół osi Ox;2a) wszystkie obroty wokół osi Ox o kąty będące całkowitą wielokrotnością 2π;3) wszystkie obroty wokół osi przechodzących przez O.4) wszystkie ruchy śrubowe, włącznie ze zdegenerowanymi (⇐⇒ izometrie zachowująceorientacj );
5) wszystkie izometrie liniowe (⇐⇒ zachowujące początek układu);6) wszystkie izometrie przeprowadzające dany obiekt P w siebie (grupy izometrii włas-nych), na przykład:
6a) P – sfera (kula), ⇐⇒ 5);6b) P – płaszczyzna, izometrie płaszczyzny „×” Z2 (dla każdej izometrii płaszczyznyistnieją dokładnie 2 rozszerzenia);
6c) P – czworościan; typowo jedna, ale np. czworościan foremny. . .
Zadania
18.1. Zauważ, że obrót o kąt π/2 wokół osi Ox jest przekształceniem liniowym o macierzy
1 0 00 0 10 −1 0
(lub
1 0 00 0 −10 1 0
, zależy w którą stronę obracamy).
Napisz macierze obrotów o π/2 wokół osi Oy i Oz. Złożenie (dwu lub więcej) ta-kich obrotów jest przekształceniem liniowym (obrotem) o macierzy będącej iloczynemodpowiednich macierzy obrotów. Wylicz te macierze dla kilku interesujących przy-padków i znajdź ich wektory własne (będą one osiami obrotu tych złożeń).
18.2. W duchu poprzedniego zadania zbadaj złożenia obrotów o π wokół osi układu współ-rzędnych. Spróbuj wypisać wszystkie odwzorowania, które można dostać składając teobroty (nie ma ich wcale tak dużo).
34

19 Fenomen foremności
Wielościan foremny:
A [Szkolna encyklopedia matematyki]• wypukły;• wszystkie ściany foremne i przystające;• każdy wierzchołek w tej samej liczbie ścian.
B [Zydler]• wypukły;• ściany foremne i przystające;• kąty wielościenne jednakowe.
C [Hilbert, Cohn-Vossen]• wszystkie wierzchołki równouprawnione;• wszystkie krawędzie równouprawnione;• wszystkie ściany równouprawnione;• wszystkie ściany foremne.
(n, k)-wielościan foremny:ściany są n-kątami i schodzą się po k w każdym wierzchołku.
schodzą się pościany 3 4 5 6
czworościan ośmiościan dwudziestościan parkietaż(tetraedr) (oktaedr) (ikosaedr) trójkątnysześcian parkietaż . . .(heksaedr) kwadratowydwunastościan . . .(dodekaedr)parkietaż . . .sześciokątny. . .
Zadania
19.1. Pokaż, że wszystkie kąty dwuścienne w wielościanie foremnym są równe.19.2. Ile (a) ścian (b) krawędzi (c) wierzchołków ma każdy z wielościanów foremnych?
Zrób odpowiednią tabelkę.19.3. Podaj przykład wielościanu, który nie jest foremny, mimo że jego ściany są foremne i
przystające.
35
20 Sztuka rysowania wielościanów foremnych
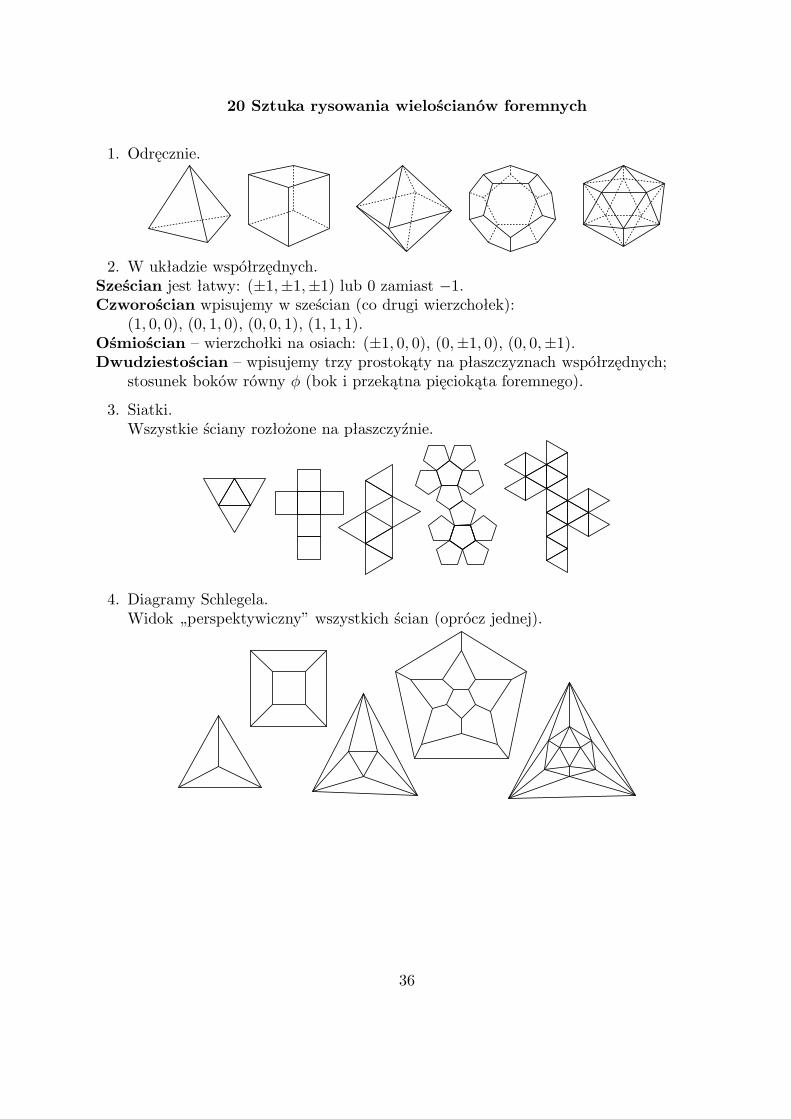
1. Odręcznie.
2. W układzie współrzędnych.Sześcian jest łatwy: (±1,±1,±1) lub 0 zamiast −1.Czworościan wpisujemy w sześcian (co drugi wierzchołek):
(1, 0, 0), (0, 1, 0), (0, 0, 1), (1, 1, 1).Ośmiościan – wierzchołki na osiach: (±1, 0, 0), (0,±1, 0), (0, 0,±1).Dwudziestościan – wpisujemy trzy prostokąty na płaszczyznach współrzędnych;stosunek boków równy φ (bok i przekątna pięciokąta foremnego).
3. Siatki.Wszystkie ściany rozłożone na płaszczyźnie.
4. Diagramy Schlegela.Widok „perspektywiczny” wszystkich ścian (oprócz jednej).
36
Zadania
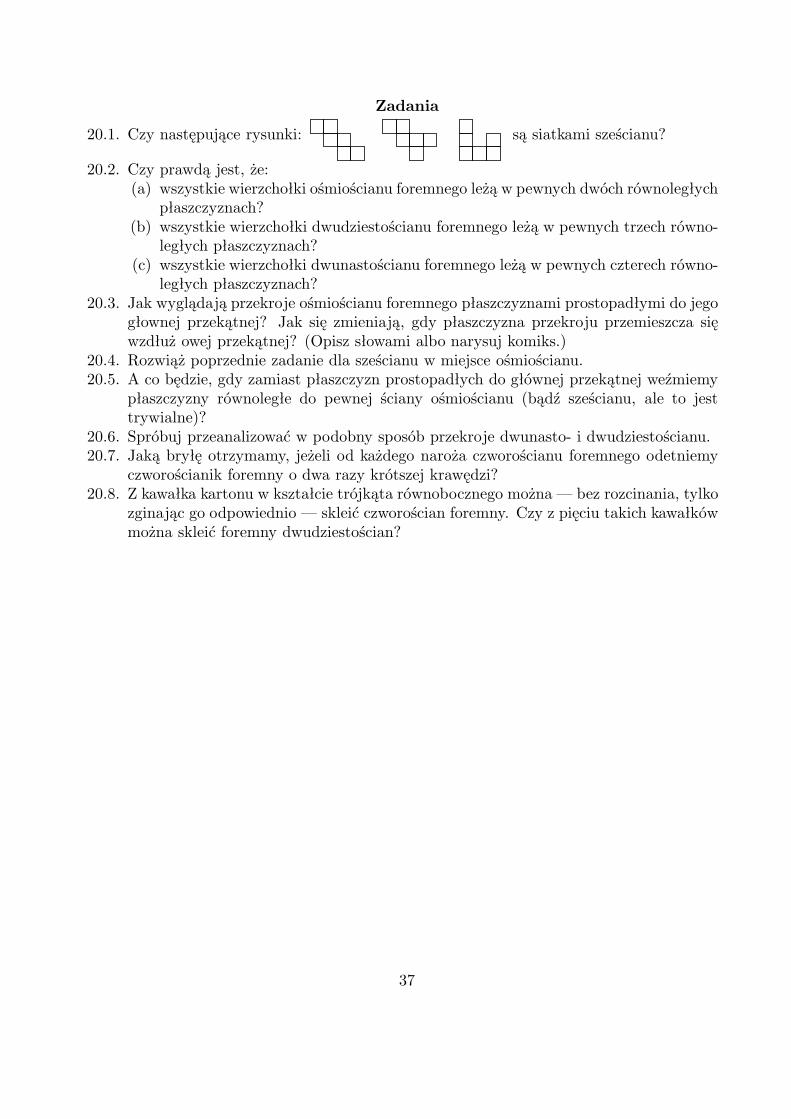
20.1. Czy następujące rysunki: są siatkami sześcianu?
20.2. Czy prawdą jest, że:(a) wszystkie wierzchołki ośmiościanu foremnego leżą w pewnych dwóch równoległychpłaszczyznach?
(b) wszystkie wierzchołki dwudziestościanu foremnego leżą w pewnych trzech równo-ległych płaszczyznach?
(c) wszystkie wierzchołki dwunastościanu foremnego leżą w pewnych czterech równo-ległych płaszczyznach?
20.3. Jak wyglądają przekroje ośmiościanu foremnego płaszczyznami prostopadłymi do jegogłownej przekątnej? Jak się zmieniają, gdy płaszczyzna przekroju przemieszcza sięwzdłuż owej przekątnej? (Opisz słowami albo narysuj komiks.)
20.4. Rozwiąż poprzednie zadanie dla sześcianu w miejsce ośmiościanu.20.5. A co będzie, gdy zamiast płaszczyzn prostopadłych do głównej przekątnej weźmiemy
płaszczyzny równoległe do pewnej ściany ośmiościanu (bądź sześcianu, ale to jesttrywialne)?
20.6. Spróbuj przeanalizować w podobny sposób przekroje dwunasto- i dwudziestościanu.20.7. Jaką bryłę otrzymamy, jeżeli od każdego naroża czworościanu foremnego odetniemy
czworościanik foremny o dwa razy krótszej krawędzi?20.8. Z kawałka kartonu w kształcie trójkąta równobocznego można — bez rozcinania, tylko
zginając go odpowiednio — skleić czworościan foremny. Czy z pięciu takich kawałkówmożna skleić foremny dwudziestościan?
37
Ćwiczenia do strony internetowejhttp://www.jolanta.malczak.linuxpl.com/jpoly.htm
(uwaga: może nie działać w pracowniach, wymaga javy)
Klikając na (polskie) nazwy brył możesz przejść do widoków poszczególnych wielościanów.Klawisz v przełącza opcje między widokiem perspektywicznym a rzutem prostopadłym.20.9. Pobaw się przez chwilę obracając wielościany myszką. (Uwaga: te bryłki mają coś
w rodzaju momentu bezwładności. Raz energicznie popchnięte kręcą się dalej siłąrozpędu. Ponowne kliknięcie zatrzymuje obrót bryły.)
20.10. Ustaw dwunastościan foremny w położeniu ogólnym, tzn. tak żeby żadna krawędź niezasłaniała żadnego wierzchołka i odwrotnie. (Chodzi o to, żeby było widać, co to zabryła.) Przerysuj ręcznie, co widzisz na ekranie. (Możesz najpierw wydrukować.)
20.11. Powtórz poprzednie ćwiczenie dla dwudziestościanu foremnego i dla każdej z po-zostałych brył, której nie umiesz narysować.
Przełącz na rzut prostopadły i zbadaj (obracając wielościan), jak wyglądają różne jegorzuty. W szczególności:20.12. Znajdź rzut czworościanu, który jest kwadratem.20.13. Znajdź rzut czworościanu, który jest trójkątem równobocznym.20.14. Znajdź rzut sześcianu, który jest prostokątem, ale nie kwadratem. Jaki jest maksy-
malny stosunek długości boków?20.15. Znajdź rzut sześcianu, który jest sześciokątem foremnym.20.16. Znajdź rzut ośmiościanu, który jest kwadratem.20.17. Znajdź rzut ośmiościanu, który jest prostokątem, ale nie kwadratem.20.18. Znajdź rzut ośmiościanu, który jest rombem, ale nie kwadratem.20.19. Znajdź rzut ośmiościanu, który jest sześciokątem foremnym.20.20. Znajdź rzut dwunastościanu, który jest sześciokątem (nieforemnym).20.21. Znajdź rzut dwunastościanu, który jest (jakimkolwiek) wielokątem foremnym.20.22. Znajdź rzut dwudziestościanu, który jest sześciokątem. Czy może być sześciokątem
foremnym?
38
21 Bryły archimedesowe
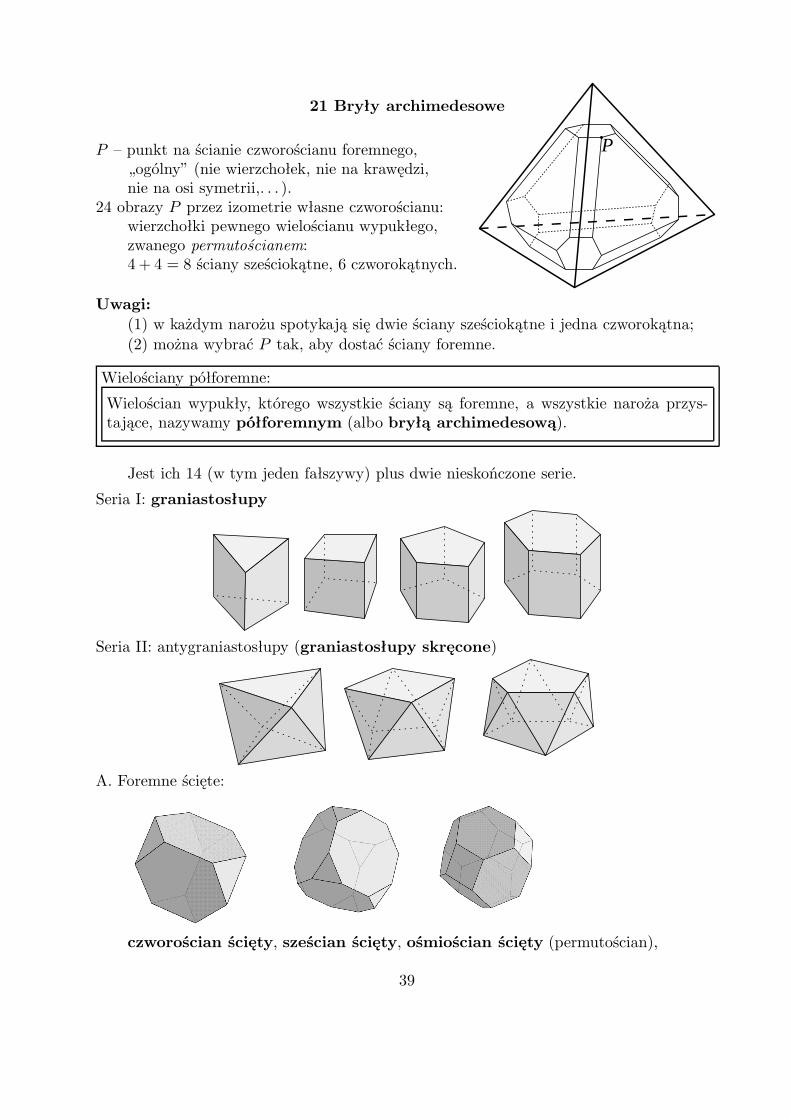
P – punkt na ścianie czworościanu foremnego,„ogólny” (nie wierzchołek, nie na krawędzi,nie na osi symetrii,. . . ).
24 obrazy P przez izometrie własne czworościanu:wierzchołki pewnego wielościanu wypukłego,zwanego permutościanem:4 + 4 = 8 ściany sześciokątne, 6 czworokątnych.
P
Uwagi:(1) w każdym narożu spotykają się dwie ściany sześciokątne i jedna czworokątna;(2) można wybrać P tak, aby dostać ściany foremne.
Wielościany półforemne:
Wielościan wypukły, którego wszystkie ściany są foremne, a wszystkie naroża przys-tające, nazywamy półforemnym (albo bryłą archimedesową).
Jest ich 14 (w tym jeden fałszywy) plus dwie nieskończone serie.
Seria I: graniastosłupy
Seria II: antygraniastosłupy (graniastosłupy skręcone)
A. Foremne ścięte:
czworościan ścięty, sześcian ścięty, ośmiościan ścięty (permutościan),
39
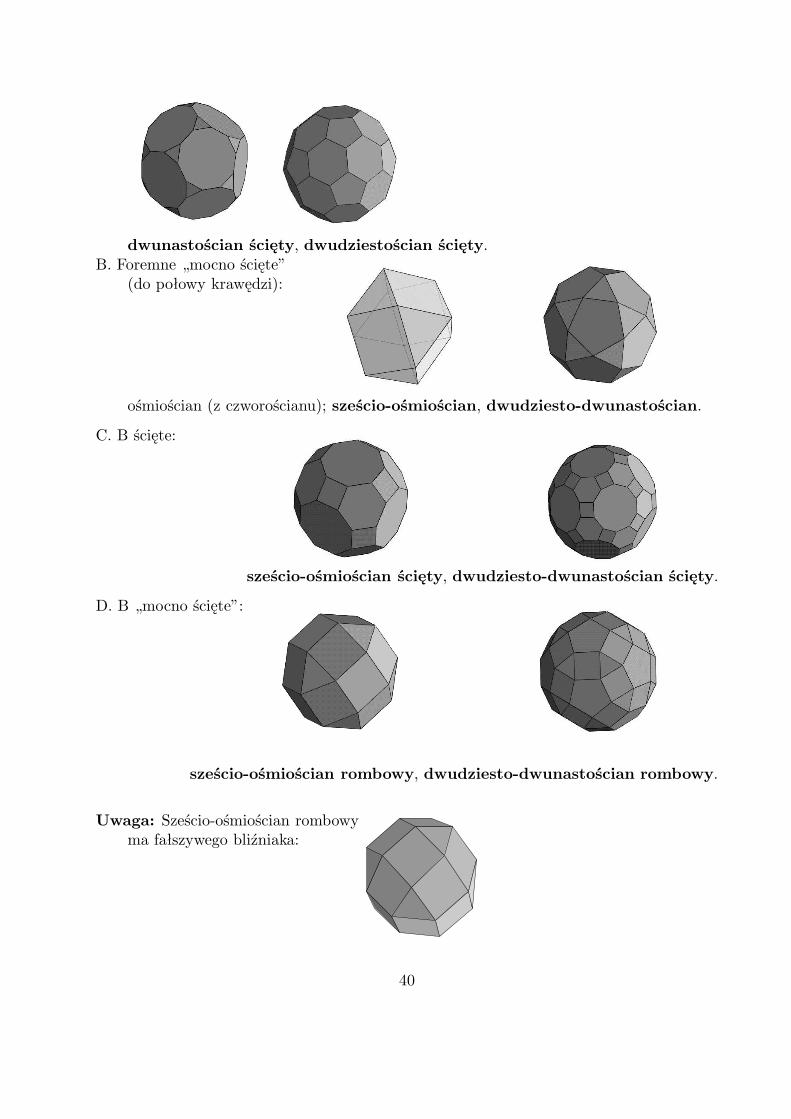
dwunastościan ścięty, dwudziestościan ścięty.B. Foremne „mocno ścięte”(do połowy krawędzi):
ośmiościan (z czworościanu); sześcio-ośmiościan, dwudziesto-dwunastościan.
C. B ścięte:
sześcio-ośmiościan ścięty, dwudziesto-dwunastościan ścięty.
D. B „mocno ścięte”:
sześcio-ośmiościan rombowy, dwudziesto-dwunastościan rombowy.
Uwaga: Sześcio-ośmiościan rombowyma fałszywego bliźniaka:
40
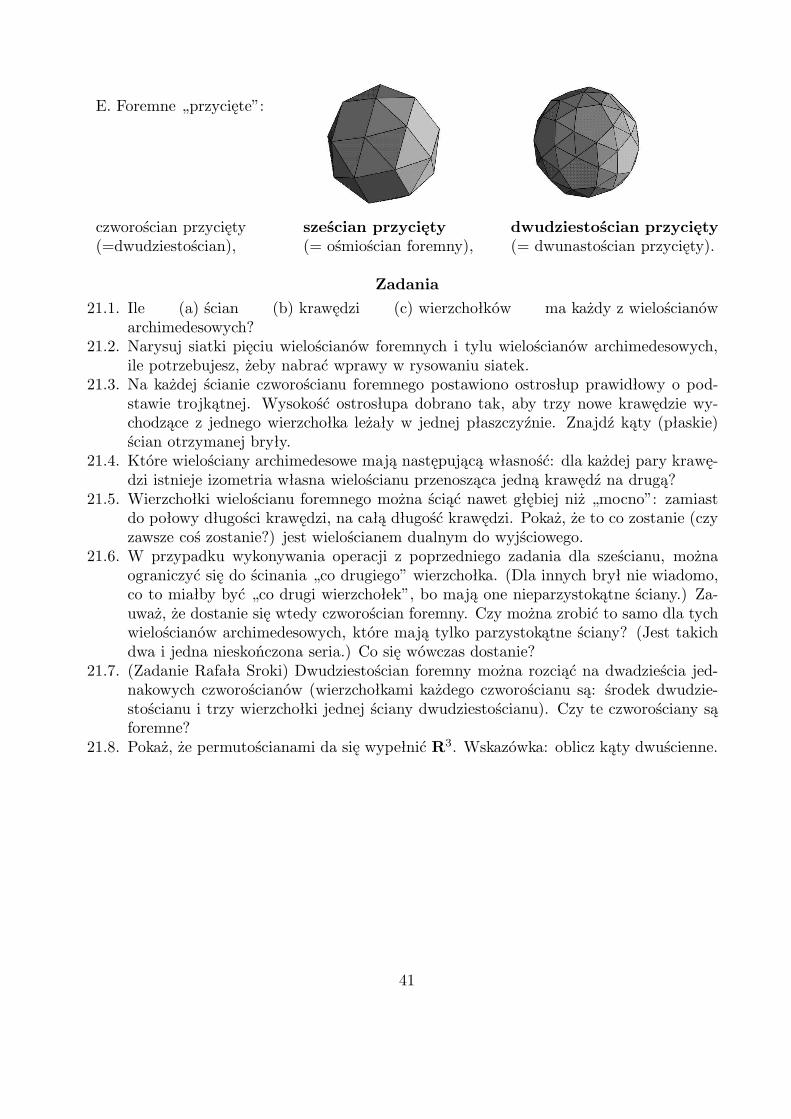
E. Foremne „przycięte”:
czworościan przycięty sześcian przycięty dwudziestościan przycięty(=dwudziestościan), (= ośmiościan foremny), (= dwunastościan przycięty).
Zadania
21.1. Ile (a) ścian (b) krawędzi (c) wierzchołków ma każdy z wielościanówarchimedesowych?
21.2. Narysuj siatki pięciu wielościanów foremnych i tylu wielościanów archimedesowych,ile potrzebujesz, żeby nabrać wprawy w rysowaniu siatek.
21.3. Na każdej ścianie czworościanu foremnego postawiono ostrosłup prawidłowy o pod-stawie trojkątnej. Wysokość ostrosłupa dobrano tak, aby trzy nowe krawędzie wy-chodzące z jednego wierzchołka leżały w jednej płaszczyźnie. Znajdź kąty (płaskie)ścian otrzymanej bryły.
21.4. Które wielościany archimedesowe mają następującą własność: dla każdej pary krawę-dzi istnieje izometria własna wielościanu przenosząca jedną krawędź na drugą?
21.5. Wierzchołki wielościanu foremnego można ściąć nawet głębiej niż „mocno”: zamiastdo połowy długości krawędzi, na całą długość krawędzi. Pokaż, że to co zostanie (czyzawsze coś zostanie?) jest wielościanem dualnym do wyjściowego.
21.6. W przypadku wykonywania operacji z poprzedniego zadania dla sześcianu, możnaograniczyć się do ścinania „co drugiego” wierzchołka. (Dla innych brył nie wiadomo,co to miałby być „co drugi wierzchołek”, bo mają one nieparzystokątne ściany.) Za-uważ, że dostanie się wtedy czworościan foremny. Czy można zrobić to samo dla tychwielościanów archimedesowych, które mają tylko parzystokątne ściany? (Jest takichdwa i jedna nieskończona seria.) Co się wówczas dostanie?
21.7. (Zadanie Rafała Sroki) Dwudziestościan foremny można rozciąć na dwadzieścia jed-nakowych czworościanów (wierzchołkami każdego czworościanu są: środek dwudzie-stościanu i trzy wierzchołki jednej ściany dwudziestościanu). Czy te czworościany sąforemne?
21.8. Pokaż, że permutościanami da się wypełnić R3. Wskazówka: oblicz kąty dwuścienne.
41
22 Klasyfikacja brył archimedesowych
[Materiały do pracy własnej.]Bryła archimedesowa to taki wielościan wypukły, że wszystkie jego ściany są wieloką-
tami foremnymi (róznych rodzajów), zaś wszystkie naroża są przystające. W szczególnościzestaw ścian spotykających się w wierzchołku jest dla każdego wierzchołka taki sam. Jeżeliw wierzchołku wielościanu archimedesowego spotykają się k1-kąt, k2-kąt, . . . , kn-kąt (wtej kolejności) to mówimy, że ma on naroże typu (k1, k2, . . . , kn).
Skonstruujemy odpowiedni wielościan dla każdego naroża, dla którego da się to zrobić,zaś dla pozostałych udowodnimy, że takiego wielościanu nie ma.
Nierówność::
Jeżeli wielościan archimedesowy ma naroże typu (k1, k2, . . . , kn), to1
k1+
1
k2+ · · ·+ 1
kn>
n− 2
2.
Lemat 1:
Jeżeli wielościan archimedesowy ma naroże typu (k1, k2, . . . , kn), przy czym k2 jestnieparzyste i różne od wszystkich pozostałych ki, to k1 = k3.
Szkic dowodu. Wystarczy popatrzeć, jakie ściany przylegają do k2-kąta wzdłużkolejnych ścian: muszą to być na zmianę k1-kąty i k3-kąty.
A: Trzy ściany w wierzchołku k, l, mBez zmniejszenia ogólności można założyć, że k ≤ l ≤ m. Wtedy (z Nierówności)
k < 6. Jeśli k = 3, to l = m i jest równe 3 lub jest liczbą parzystą ≤ 10.Dla takich naroży dostajemy następujące wielościany:(3, 3, 3) — czworościan foremny (bryłę platońską);(3, 4, 4) — graniastosłup prosty (o podstawie trójkątnej);(3, 6, 6) — czworościan ścięty;(3, 8, 8) — sześcian ścięty;
(3, 10, 10) — dwunastościan ścięty.Jeśli k = 4, to l i m są oba parzyste lub jedno z nich wynosi 4.
(4, 4, m) (m dowolne) odpowiada graniastosłupowi prostemu o podstawie m-kątnej.W szczególności dla m = 4 mamy sześcian (bryłę platońską).
Niech teraz l = 2a, m = 2b. Wówczas1
a+
1
b>
1
2. Powyższy warunek jest spełniany przez
następujące pary liczb naturalnych 2 ≤ a ≤ b: a = 2, b dowolne; a = 3, b = 3, 4 lub 5.Dla a = 2 (czylim = 4) dostajemy graniastosłupy. Trzy pozostałe naroża odpowiadają
następującym bryłom archimedesowym:(4, 6, 6) — ośmiościanowi ściętemu;(4, 6, 8) — sześcio-ośmiościanowi ściętemu;
(4, 6, 10) — dwudziesto-dwunastościanowi ściętemu.
42

Jeśli k = 5, to l = m i jest równe 5 lub jest liczbą parzystą ≤ 6 (więc przy k ≤ l ≤ mrówną 6). Dostajemy
(5, 5, 5) — dwunastościan foremny (bryłę platońską);(5, 6, 6) — dwudziestościan ścięty (znany też jako piłka nożna albo jako fulleren).
B. Cztery ściany w wierzchołku (k, l, m, n)
Jeśli w wierzchołku schodzą się cztery ściany, to co najmniej jedna z nich jest trój-kątem. Bez zmniejszenia ogólności k jest najmniejszą z liczb k, l, m, n. Zatem k = 3.Załóżmy najpierw, że co najmniej jedna z liczb l, m, n jest także równa 3.
Lemat 2:Jeżeli w wierzchołku spotykają się dwa sąsiadujące trójkąty, to spotykają się trzytrójkąty.
Dowód. Jeśli k = l = 3, to każdy trójkąt graniczy z innym trójkątem. Niech trójkątABC graniczy z innym trójkątem wzdłuż boku AB. Ale w wierzchołku C także musząschodzić się dwa przylegające trójkąty, więc ABC graniczy z innym trójkątem także wzdłużdrugiego boku, powiedzmy AC. Wtedy w wierzchołku A (więc i w każdym innym) schodząsię trzy trójkąty.
(3, 3, 3, n) (dla dowolnego n) to graniastosłup skręcony.Załóżmy teraz, że w narożu nie ma dwóch sąsiadujących trójkątów. Dwa trójkąty
mogą jednak wystąpić także w inny sposób: (3, l, 3, n). Wówczas1
l+
1
n>
1
3.
Ten warunek spełniają następujące pary liczb naturalnych 4 ≤ l ≤ n: l = n = 4,l = 4, n = 5 i l = n = 5.Nie ma wielościanu archimedesowego o narożu (3, 4, 3, 5). Dowód jest analogiczny do
dowodów Lematów.)(3, 4, 3, 4) odpowiada sześcio-ośmiościanowi;(3, 5, 3, 5) — dwudziesto-dwunastościanowi.
Pozostaje przypadek k = 3, l, m, n 6= 3. Wówczas wynika, że l = n; więc2
l+
1
m>
2
3.
Nierówność ta jest spełniana przez dokładnie dwie pary liczb naturalnych ≥ 4: l =4, m = 4 lub l = 4, m = 5.
(3, 4, 4, 4) odpowiada sześcio-ośmiościanowi rombowemu (rys. 12)(albo uwaga!!! jego fałszywemu bliźniakowi);
(3, 4, 5, 4) — dwudziesto-dwunastościanowi rombowemu.
43
23 Wielościany gwiaździste
Na każdej ścianie wielościanu (foremnego) stawiamy ostrosłup. Warianty:
1. Ostrosłup o ścianach bocznych równobocznych.ośmiościan −→ stella octangula.
2. Tak, żeby zminimalizować liczbę różnyc płaszczyzn ścian.a) Dwa sąsiednie trójkąty łączą się w romb:czworościan −→ sześcian;sześcianu bądź ośmiościanu −→ dwunastościan rombowy;dwunasto- bądź dwudziestościanu −→ trzydziestościan rombowy.b) Trójkąty w płaszczyźnie sąsiedniej ściany:ośmiościan −→ stella octangula;dwunastościan −→ dwunastościan gwiaździsty mały.c) Jeszcze inaczej:dwudziestościan −→ dwunastościan gwiaździsty wielki.
Zadania
23.1. Dwunastościanami rombowymi też można wypełnić przestrzeń. Sprawdź to: obliczmiarę kąta dwuściennego w dwunastościanie rombowym. Ile dwunastościanów schodzisię wzdłuż każdej krawędzi?
23.2. Dwunastościan gwiaździsty można interpretować jako bryłę, której ścianami są prze-nikające się pięciokąty gwiaździste („pentagramy”). Sprawdź, że przy tym rozumieniuma on istotnie 12 ścian i spełnia wszystkie warunki z definicji wielościanu foremnegopoza wypukłością.
44
24 Wielościany wypukłe w ogólności
Wielościan wypukły:
Wielościan wypukły to• otoczka wypukła skończenie wielu punktów, albo równoważnie• przekrój skończenie wielu półprzestrzeni.
Wierzchołki, krawędzie, ściany:(1) każda ściana jest wielokątem wypukłym, tzn. {otoczką wypukłą skończenie wielupunktów (na płaszczyźnie) / przekrojem skończenie wielu półpłaszczyzn};
(2) każda krawędź jest bokiem dokładnie dwóch ścian;(3) od każdej ściany do każdej innej da się przejść w skończenie wielu krokach polegającychna przejściu ze ściany na ścianę sąsiednią poprzez wspólną krawędź.
Twór spełniający powyższe warunki nazywamy powierzchnią wielościenną.
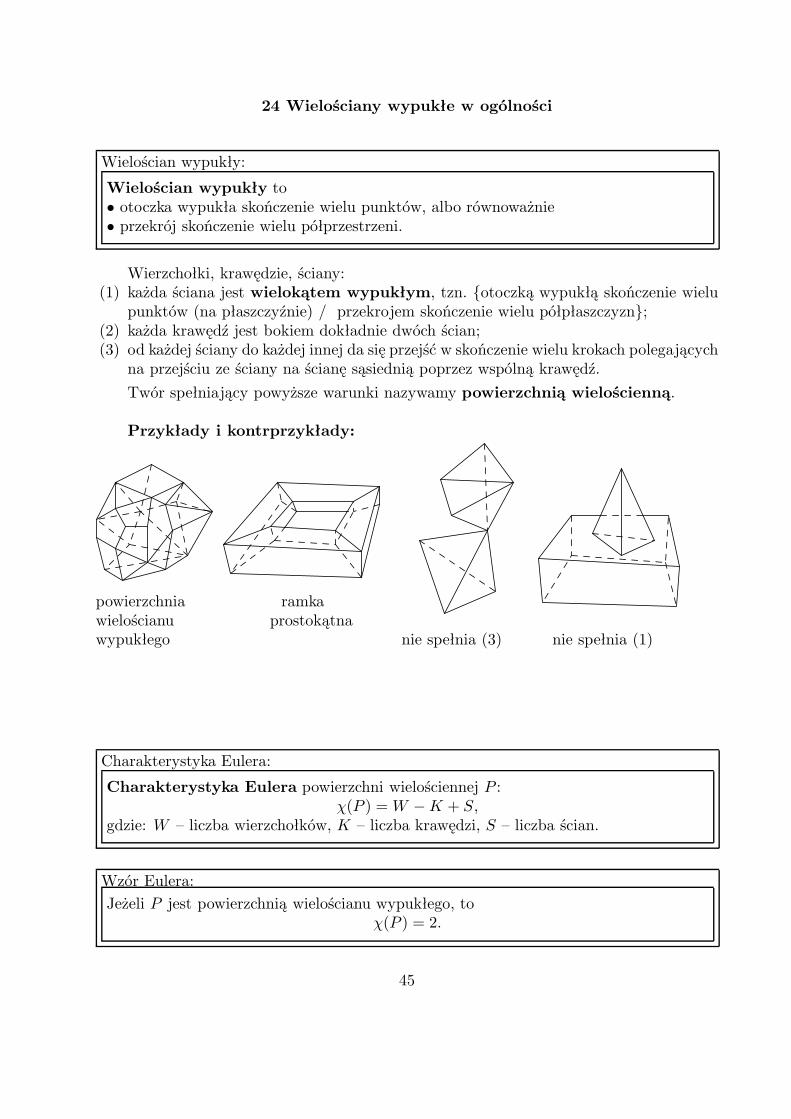
Przykłady i kontrprzykłady:
powierzchnia ramkawielościanu prostokątnawypukłego nie spełnia (3) nie spełnia (1)
Charakterystyka Eulera:
Charakterystyka Eulera powierzchni wielościennej P :χ(P ) = W −K + S,
gdzie: W – liczba wierzchołków, K – liczba krawędzi, S – liczba ścian.
Wzór Eulera:Jeżeli P jest powierzchnią wielościanu wypukłego, to
χ(P ) = 2.
45
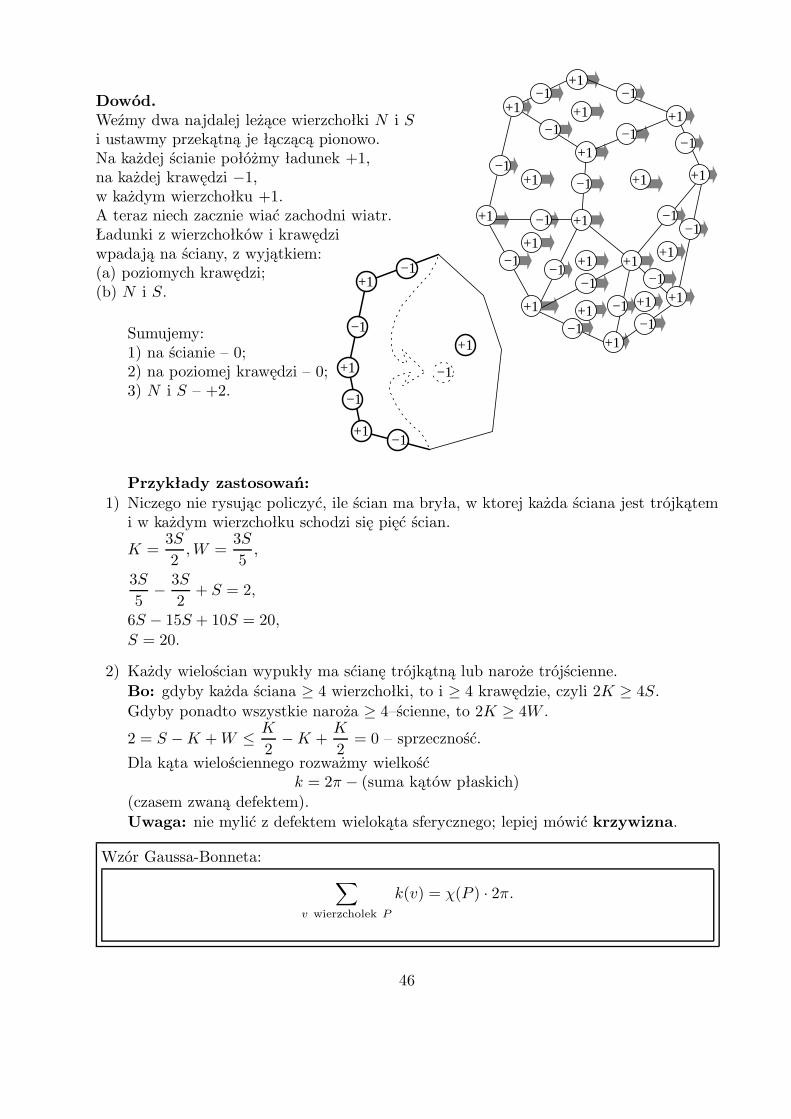
Dowód.Weźmy dwa najdalej leżące wierzchołki N i Si ustawmy przekątną je łączącą pionowo.Na każdej ścianie połóżmy ładunek +1,na każdej krawędzi −1,w każdym wierzchołku +1.A teraz niech zacznie wiać zachodni wiatr.Ładunki z wierzchołków i krawędziwpadają na ściany, z wyjątkiem:(a) poziomych krawędzi;(b) N i S.
+1
+1
+1+1
+1
+1
+1
+1+1
+1
+1
+1+1
+1
+1
+1
+1
−1 −1
−1−1
−1
−1
−1
−1
−1
−1
−1
−1
−1
−1−1 +1
−1
+1
−1
Sumujemy:1) na ścianie – 0;2) na poziomej krawędzi – 0;3) N i S – +2.
+1
+1
+1
−1
−1
−1
−1
+1
−1
Przykłady zastosowań:1) Niczego nie rysując policzyć, ile ścian ma bryła, w ktorej każda ściana jest trójkątemi w każdym wierzchołku schodzi się pięć ścian.
K =3S
2, W =
3S
5,
3S
5− 3S
2+ S = 2,
6S − 15S + 10S = 20,
S = 20.
2) Każdy wielościan wypukły ma sćianę trójkątną lub naroże trójścienne.Bo: gdyby każda ściana ≥ 4 wierzchołki, to i ≥ 4 krawędzie, czyli 2K ≥ 4S.Gdyby ponadto wszystkie naroża ≥ 4–ścienne, to 2K ≥ 4W .
2 = S −K + W ≤ K
2−K +
K
2= 0 – sprzeczność.
Dla kąta wielościennego rozważmy wielkośćk = 2π − (suma kątów płaskich)
(czasem zwaną defektem).Uwaga: nie mylić z defektem wielokąta sferycznego; lepiej mówić krzywizna.
Wzór Gaussa-Bonneta:∑
v wierzcholek P
k(v) = χ(P ) · 2π.
46

Dowód:∑
v wierzcholek P
k(v) =∑
v
(2π − (suma kątów płaskich))
= 2π ·W −∑
(wszystkich kątów płaskich) =
= 2π ·W −∑
s
(suma kątów S) =
= 2π ·W −∑
s sciana
(n− 2)π =
= 2π ·W − π ·∑
s sciana
(liczba boków s + 2π · S
= 2π ·W − π · 2K + 2π · S = 2π · χ(P ).
W szczególności dla wielościanu wypukłego∑
v k(v) = 4π.
Przyklady wielościanów o innej charakterystyce Eulera.1) ramka: W = 16, K = 32, S = 16, χ = 0.2) n sklejonych ramek: W = 12n + 4, K = 28n + 4, S = 14n + 2, χ = 12n + 4− 28n−
4 + 14n + 2 = −2n + 2 = −2(n− 1).W ten sposób można dostać dowolną liczbę parzystą ≤ 2.
χ jest parzyste:
Powierzchnia wielościenna w R3 (zamknięta, bez samoprzecięć) ma parzystą charak-terystykę Eulera.
Lemat. Charakterystyka Eulera nie zmienia się przy podpodziałach:a) podział krawędzi na 2 nowym wierzchołkiem (W + 1, K + 1, S).b) narysowanie nowej krawędzi między dwoma wierzchołkami (W, K + 1, S + 1).Dowód parzystości χ.Rzutujemy wielościan na płaszczyznę, dorysowujemy ewentualne nowe krawędzie i
wierzchołki – przeciwobrazy.Dwa rodzaje krawędzi:
• wkład od krawędzi b) i ich wierzchołków jest 0.• wkład od reszty: narysuj resztę – każda rzecz parzyście wiele razy.
Zadania24.1. Sprawdź wzór Eulera bezpośrednio (wyliczając ilości wierzchołków, krawędzi i ścian)
dla brył platońskich, ostrosłupa o podstawie n-kątnej, graniastosłupa o podstawien-kątnej, graniastosłupa skręconego o podstawie n-kątnej.
47
24.2. W dowolnym wielościanie niech Si oznacza liczbę ścian i-kątnych, zaś Wi — liczbęwierzchołków, w których spotyka się i ścian. Uzasadnij, że 3S3 + 4S4 + 5S5 · · · =3W3 + 4W4 + 5W5 · · · = 2K.
24.3. Pokaż, że 3W ≤ 2K oraz 3S ≤ 2K. Kiedy zachodzą równości?Z powyższego faktu i wzoru Eulera wywnioskuj następujące nierówności:
2W ≥ S + 4, 2S ≥W + 4, 3W ≥ K + 6, 3S ≥ K + 6.Czy w tych nierównościach może zdarzyć się równość? Jeśli tak, to kiedy?24.4. Wielościan ma pięć ścian. Ile może mieć wierzchołków? Ile krawędzi?24.5. Czy wielościan może mieć nieparzyście wiele nieparzystokątnych ścian?24.6. Czy dla każdej trójki liczb naturalnych W, K, S spęłniających wzór Eulera istnieje
wielościan wypukły o liczbie wierzchołków W , liczbie krawędzi K i liczbie ścian S? Agdy dodatkowo założymy S ≥ 4 i W ≥ 4?
24.7. Wykaż, że każdy wielościan wypukły musi mieć przynajmniej jedą ścianę trójkątnąlub przynajmniej jedno naroże trójścienne.
24.8. Wykaż, że w każdym wielościanie wypukłym suma liczby ścian trójkątnych i liczbynaroży trójściennych wynosi co najmniej 8. Podaj przykłady kilku różnych wielościa-nów, w których suma ta wynosi dokładnie 8.
48
25 Fullereny
Fulleren to związek chemiczny, w którym atomy węgla są rozmieszczone w wierz-chołkach pewnego wielościanu wypukłego, a krawędzie tego wielościanu odpowiadają wią-zaniom chemicznym. Różne rodzaje fullerenów odpowiadają różnym wielościanom; wielo-ściany te mają następujące wspólne własności:(i) wszystkie ich ściany są pięcio- lub sześciokątne;(ii) w każdym wierzchołku schodzą się dokładnie trzy ściany.Dla prostoty zapisu w poniższych zadaniach słowa fulleren używa się również na oznaczeniewielościanu spełniającego te dwa warunki.
Zadania
25.1. Pokaż, że każdy fulleren ma parzyście wiele wierzchołków.25.2. Pokaż, że każdy fulleren ma dokładnie 12 ścian pięciokątnych. Jaką bryłą jest najm-
niejszy możliwy fulleren?25.3. Pokaż, że fulleren, w którym żadne trzy pięciokąty nie schodzą się w jednym wierz-
chołku, ma co najmniej 36 wierzchołków. Możesz to zrobić jak następuje:1) zauważ, że każda ściana pięciokątna zawiera co najmniej jeden wierzchołek, którynie jest wierzchołkiem żadnego innego pięciokąta;
2) policz wszystkie wierzchołki ścian pięciokątnych, uwzględniając, które z nichliczysz dwukrotnie.
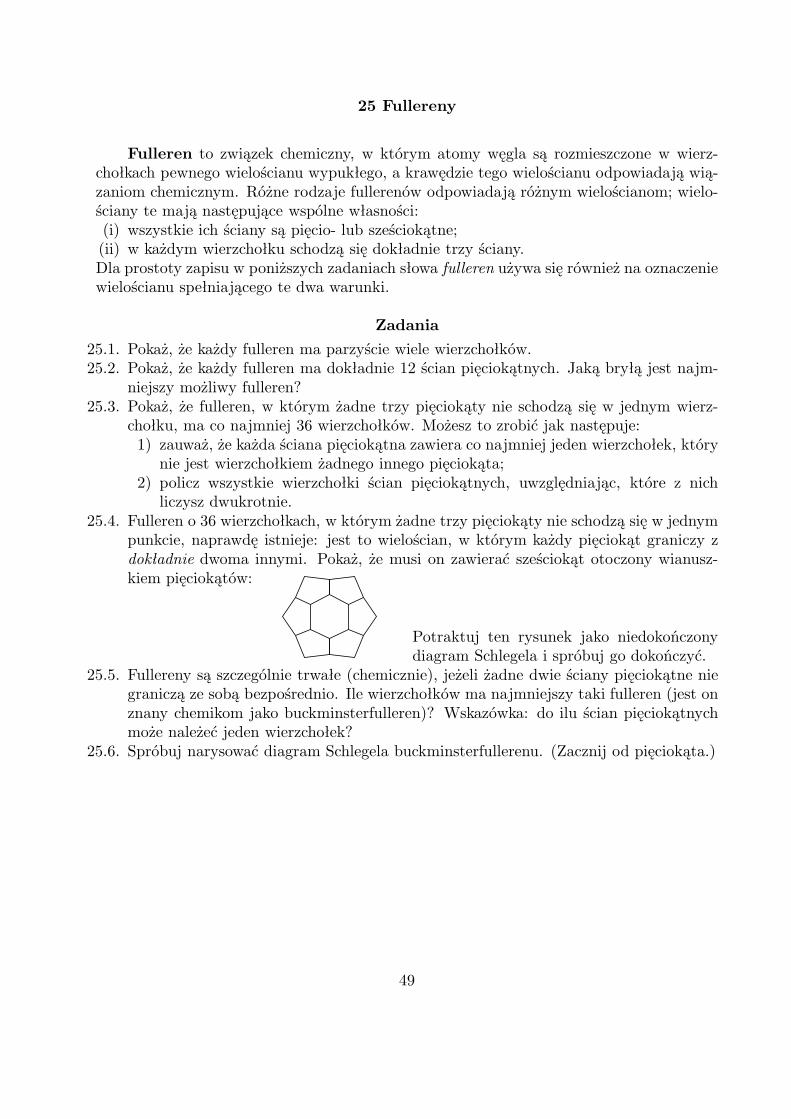
25.4. Fulleren o 36 wierzchołkach, w którym żadne trzy pięciokąty nie schodzą się w jednympunkcie, naprawdę istnieje: jest to wielościan, w którym każdy pięciokąt graniczy zdokładnie dwoma innymi. Pokaż, że musi on zawierać sześciokąt otoczony wianusz-kiem pięciokątów:
Potraktuj ten rysunek jako niedokończonydiagram Schlegela i spróbuj go dokończyć.
25.5. Fullereny są szczególnie trwałe (chemicznie), jeżeli żadne dwie ściany pięciokątne niegraniczą ze sobą bezpośrednio. Ile wierzchołków ma najmniejszy taki fulleren (jest onznany chemikom jako buckminsterfulleren)? Wskazówka: do ilu ścian pięciokątnychmoże należeć jeden wierzchołek?
25.6. Spróbuj narysować diagram Schlegela buckminsterfullerenu. (Zacznij od pięciokąta.)
49
26 Objętość
Funkcja, która każdemu wielościanowi P (czemu jeszcze? mierzalnemu podzbiorowi R3)przyporządkowuje liczbę vol(P ).
Własności objętości:
(1) nieujemna: vol(P ) ≥ 0;
(2) addytywna: P1, P2 dwa wielościany bez wspólnych punktów wewnętrznych,to vol(P1 ∪ P2) = vol(P1) + vol(P2);
(3) niezmienniczana izometrie: P1, P2 dwa wielościany przystające, to vol(P1) = vol(P2);
(4) unormowana: vol(wzorzec) = 1, wzorzec – sześcian jednostkowy.
Uwaga:((1) ∧ (2)
)⇒
(
(P1 ⊂ P2)⇒(vol(P1) ≤ vol(P2)
))
.
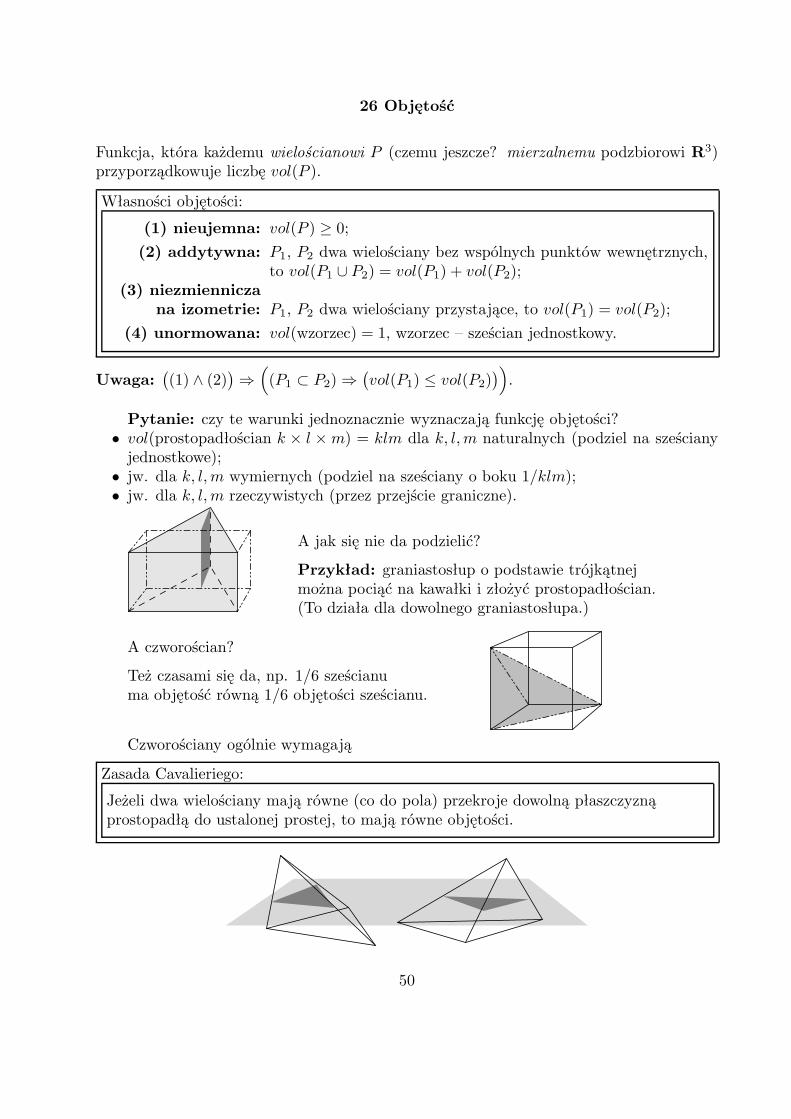
Pytanie: czy te warunki jednoznacznie wyznaczają funkcję objętości?• vol(prostopadłościan k × l ×m) = klm dla k, l, m naturalnych (podziel na sześcianyjednostkowe);• jw. dla k, l, m wymiernych (podziel na sześciany o boku 1/klm);• jw. dla k, l, m rzeczywistych (przez przejście graniczne).
A jak się nie da podzielić?
Przykład: graniastosłup o podstawie trójkątnejmożna pociąć na kawałki i złożyć prostopadłościan.(To działa dla dowolnego graniastosłupa.)
A czworościan?
Też czasami się da, np. 1/6 sześcianuma objętość równą 1/6 objętości sześcianu.
Czworościany ogólnie wymagają
Zasada Cavalieriego:
Jeżeli dwa wielościany mają równe (co do pola) przekroje dowolną płaszczyznąprostopadłą do ustalonej prostej, to mają równe objętości.
50
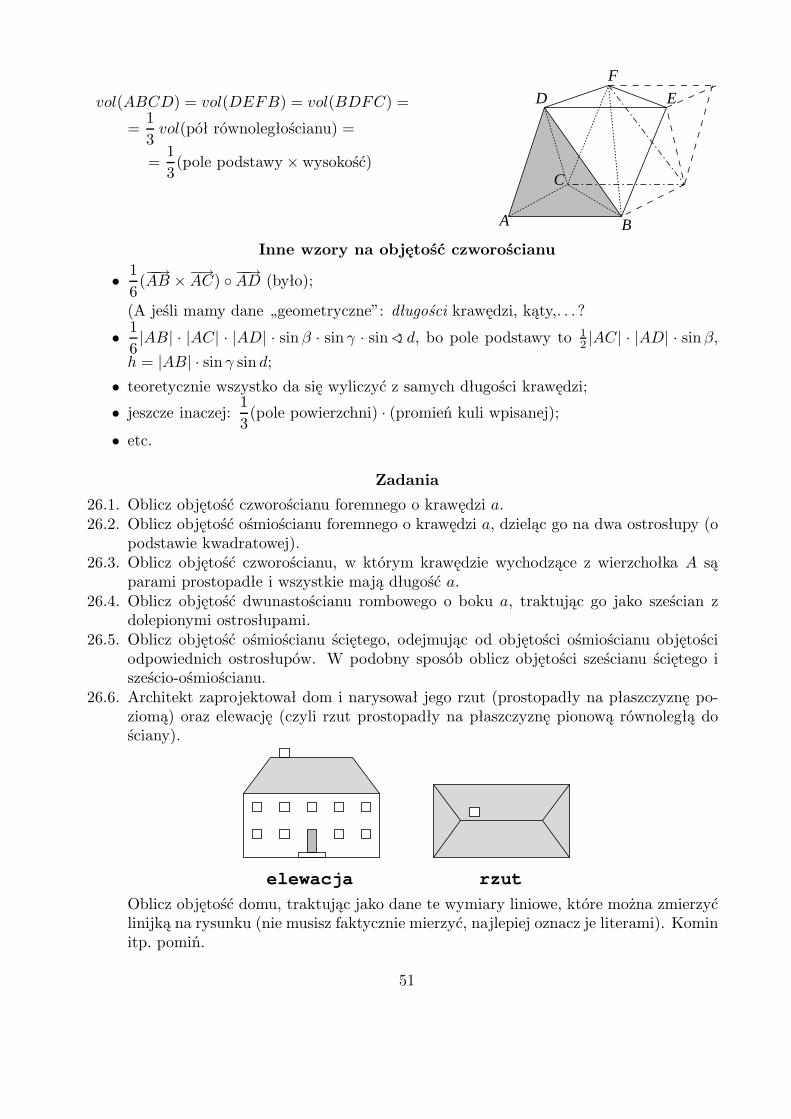
vol(ABCD) = vol(DEFB) = vol(BDFC) =
=1
3vol(pół równoległościanu) =
=1
3(pole podstawy× wysokość)
A B
C
D E
F
Inne wzory na objętość czworościanu
• 1
6(−−→AB ×−→AC) ◦ −−→AD (było);
(A jeśli mamy dane „geometryczne”: długości krawędzi, kąty,. . .?
• 1
6|AB| · |AC| · |AD| · sinβ · sin γ · sin<) d, bo pole podstawy to 1
2|AC| · |AD| · sinβ,
h = |AB| · sin γ sin d;
• teoretycznie wszystko da się wyliczyć z samych długości krawędzi;• jeszcze inaczej: 1
3(pole powierzchni) · (promień kuli wpisanej);
• etc.
Zadania
26.1. Oblicz objętość czworościanu foremnego o krawędzi a.26.2. Oblicz objętość ośmiościanu foremnego o krawędzi a, dzieląc go na dwa ostrosłupy (o
podstawie kwadratowej).26.3. Oblicz objętość czworościanu, w którym krawędzie wychodzące z wierzchołka A są
parami prostopadłe i wszystkie mają długość a.26.4. Oblicz objętość dwunastościanu rombowego o boku a, traktując go jako sześcian z
dolepionymi ostrosłupami.26.5. Oblicz objętość ośmiościanu ściętego, odejmując od objętości ośmiościanu objętości
odpowiednich ostrosłupów. W podobny sposób oblicz objętości sześcianu ściętego isześcio-ośmiościanu.
26.6. Architekt zaprojektował dom i narysował jego rzut (prostopadły na płaszczyznę po-ziomą) oraz elewację (czyli rzut prostopadły na płaszczyznę pionową równoległą dościany).
elewacja rzut
Oblicz objętość domu, traktując jako dane te wymiary liniowe, które można zmierzyćlinijką na rysunku (nie musisz faktycznie mierzyć, najlepiej oznacz je literami). Kominitp. pomiń.
51
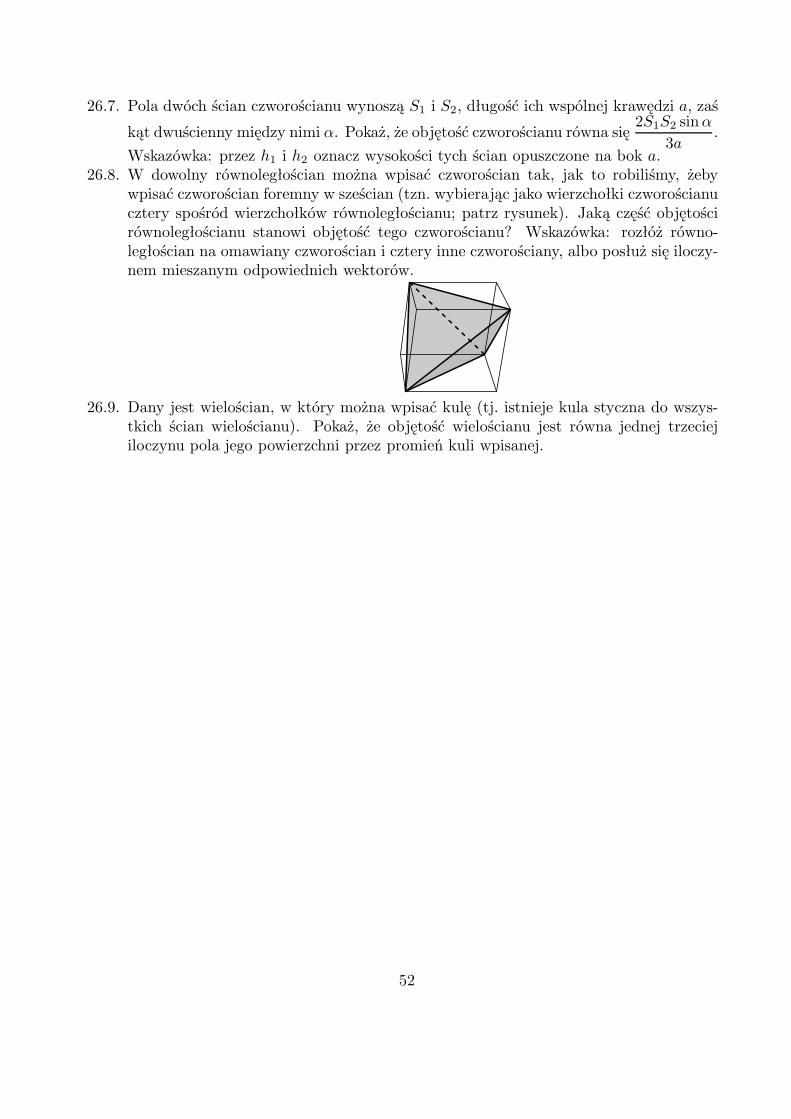
26.7. Pola dwóch ścian czworościanu wynoszą S1 i S2, długość ich wspólnej krawędzi a, zaś
kąt dwuścienny między nimi α. Pokaż, że objętość czworościanu równa się2S1S2 sinα
3a.
Wskazówka: przez h1 i h2 oznacz wysokości tych ścian opuszczone na bok a.26.8. W dowolny równoległościan można wpisać czworościan tak, jak to robiliśmy, żeby
wpisać czworościan foremny w sześcian (tzn. wybierając jako wierzchołki czworościanucztery spośród wierzchołków równoległościanu; patrz rysunek). Jaką część objętościrównoległościanu stanowi objętość tego czworościanu? Wskazówka: rozłóż równo-ległościan na omawiany czworościan i cztery inne czworościany, albo posłuż się iloczy-nem mieszanym odpowiednich wektorów.
26.9. Dany jest wielościan, w który można wpisać kulę (tj. istnieje kula styczna do wszys-tkich ścian wielościanu). Pokaż, że objętość wielościanu jest równa jednej trzeciejiloczynu pola jego powierzchni przez promień kuli wpisanej.
52
27 Niezmiennik Dehna*
Bez zasady Cavalieriego nie da się pokazać jednoznaczności objętości.
Trzeci Problem Hilberta:
„Wskazać dwa czworościany o równych podstawach i równych wysokościach, którychnie można w żaden sposób podzielić na przystające czworościany. . . ”
David Hilbert, 1900
„Proszę bardzo.”
Max Dehn, 1900
Dowód: konstrukcja niezmiennika.
V – przestrzeń liniowa nad Q, tzn.:• 0 ∈ V ;• u, v ∈ V ⇒ u + v ∈ V ;• u ∈ V, q ∈ Q⇒ qu ∈ V .Przykłady:• V = {a + b
√2 : a, b ∈ Q};
• V = {a√
3 + b√
5 : a, b ∈ Q};• V = {aπ + be + c
√17 : a, b, c ∈ Q};
• ogólnie: M ⊂ R skończony: M = {m1, . . . , mk}, V (M) = {∑ki=1 akmk : ak ∈ Q}.
Uwaga: M generuje, ale nie musi być bazą: V ({√
2, 1/√
2, π}) = V ({√
2, π})Ale: zawiera bazę (wystarczy powyrzucać liniowo zależne).
Funkcjonały liniowe (nad Q).f : V (M)→ Q : f(qv) = qf(v), f(u + v) = f(u) + f(v) dla q ∈ Q, u, v ∈ V (M).
Fakt: Funkcjonał liniowy jest jednoznacznie wyznaczony przez wartości na (dowolnej)bazie V (M).
Wniosek (Twierdzenie Hahna-Banacha):Jeśli M ⊂M ′, to każdy funkcjonałf : V (M)→ Q można rozszerzyćdo funkcjonału f ′ : V (M ′)→ Q.
M
M’
53

Dane: wielościan P , funkcjonał f : V (M)→ Q, gdzie:MP = {miary kątów wewnętrznych P} ∪ {π}, np.M = {π/2, π}; V (M ) = V ({π});M = {π/3, π/2, π}; V (M ) = V ({π});M = {arccos(1/3), π}; V (M ) 6= V ({π}).
R ⊃M ⊃MP , f : V (M)→ Q, f(π) = 0, f(π) = 0
Niezmiennik Dehna wielościanu P związany z f :
Df (P ) =∑
ekrawędź P
ℓ(e)f(<) e)
ℓ(e) – długość E; f(<) e) – kąt przy e
Df ( ) = 12 · a · f(π/2), ale f(π/2) = 12f(π) = 0 =⇒ Df ( ) = 0;
Df ( ) = 6·a·f(arccos 13) – można wybrać niezerowe, o ile arccos(1/3) niewspółmierne
z π.
Fakt 1. Niezmiennik Dehna jest addytywny (w tym sensie co objętość).
Wniosek. Niezmiennik Dehna jest niezmiennikiem równoważności przez rozkład.
Dowód. Wielościan P pocięty na mniejsze wielościanyP = P1 ∪ P2 ∪ . . . ∪ Pk
M ⊃ {wszystkie kąty dwuścienne wszystkich Pi} ∪ {wszystkie kąty dwuścienne P} ∪ {π}f : V (M)→ Q jak następuje:
każdemu odcinkowi e zawartemu w krawędzi wielościanu Pi przyznajemy jego Pi-wagęwPi
(e) = ℓ(e)f(<) e)
Df (Pi) jest sumą Pi-wag kawałków krawędzi Pi.Mamy
∑
iDf (Pi) =
∑
i
∑
e⊂Pi
wPi(e) =
∑
∃i:e⊂Pi
∑
iwPi
(e) =∑
∃i:e⊂Pi
ℓ(e)∑
if(<) Pi
e) =
=∑
∃i:ew⊂Pi
ℓ(e)f(2π) +∑
e⊂P
ℓ(e)f(<) P e) = 0 + Df (P ).
54
Fakt 2. arccos(1/3) jest niewspółmierne z π.
Dowód. Nie wprost: gdyby φ := arccos(1/3) = pq π, to cos(qφ) = ±1.
Pokażemy przez indukcję, że cos(kφ) =Ak
3k, gdzie Ak nie dzieli się przez 3.
k = 0: cos 0 · φ = 1 = 1/30;
k = 1: cos 1 · φ = 1/3;
k ≥ 2:cos(k + 1)φ = cos kφ cosφ− sin kφ sinφ
cos(k − 1)φ = cos kφ cosφ + sin kφ sinφ
cos(k + 1)φ + cos(k − 1)φ = 2 cos kφ cosφ, czyli
cos(k + 1)φ = 2 cos kφ cosφ − cos(k − 1)φ = (z zał. ind.)2
3
Ak
3k− Ak−1
3k−1=
2Ak − 9Ak−1
3k+1,
a 2Ak − 9Ak−1 nie dzieli się przez 3.
Morał. Sześcian nie jest równoważny przez rozkład z żadnym czworoscianem forem-nym (niezależnie od objętości).
Zadania
27.1. Rozpatrzmy wszystkie czworościany, których wierzchołkami są pewne cztery (nieleżącena jednej ścianie) wierzchołki sześcianu jednostkowego.a) Ile jest wśród nich różnych (nieprzystających) czworościanów?b) Które z nich mają równe objętości?c) Wskaż wśród nich dwa czworościany o równej objętości, o których potrafiszpokazać, że nie są równoważne przez rozkład skończony.
Uwaga: Aby odpowiedzieć na pytanie c), musisz wiedzieć, że arccos(1/√
3) jestniewspółmierne z π; dowodzi się tego bardzo podobnie, jak niewspółmierności z πliczby arccos(1/3). Spróbuj przeprowadzić ten dowód; jeśli Ci się nie uda, rozwiążzadanie traktując tę niewspółmierność jako wiadomą.
55

28 Elementy geometrii różniczkowej
Krzywa zadana parametrycznie: γ(t) =(x(t), y(t), z(t)
)dla t z pewnego (być może nie-
właściwego) przedziału [a, b] ⊂ R.Wektor styczny do krzywej (wektor prędkości) w punkcie γ(t) to γ′(t) =
(x′(t), y′(t), z′(t)
)
(szybkość = |γ′(t)|).Przykłady.Prosta γ(t) = P + tU .Okrąg γ(t) = P + (cos t)U + (sin t)V , |U | = |V | = r, U ⊥ V .Helisa (nie „spirala”!) γ(t) = P + (cos t)U + (sin t)V + tW , |U | = |V | = r, U, V, W
parami prostopadłe; na przykład γ(t) = (r cos t, r sin t, ct).Długość krzywej
∫ b
a|γ′(t)|dt.
Przykład. Ewolwenta helisy
E(t) = γ(t)− s(t)γ′(t)
|γ′(t)| ,γ(t) = (r cos t, r sin t, ct),γ′(t) = (−r sin t, r cos t, c),|γ′(t)| =
√a2 + b2,
s(t) =√
a2 + b2t,
E(t) = (. . . , ldots, bt−√
a2 + b2t · b√a2 + b2
) = (. . . , . . . , 0).
Parametryzacja łukowa (długością) – |γ′(t)| = 1 (∫ t
a|γ′(u)|du = t).
Twierdzenie:
Każda krzywa nieosobliwa ma parametryzację długością.
Dowód. s(t) =∫ t
a|γ′(u)|du
ds
dt= |γ′(t)| > 0 =⇒ ∃ odwrotna t = t(s).
α(s) = γ(t(s)
), |α′(s)| = |γ′
(t(s)
) dt
ds| = | dt
ds
ds
dt| = 1.
Niech γ sparametryzowana długością. Oznaczmy• T := γ′ wektor styczny;• κ = |T ′| krzywizna;• N =
1
κT ′ wektor normalny główny;
• B = T ×N , (T, N, B) – trójnóg (reper) Freneta.Wówczas:
T ′ = N ′ = 1;T ′ ⊥ T , bo 0 = 1′ = (T ◦ T )′ = T ′ ◦ T + T ◦ T ′ = 2T ◦ T ′, więc N ⊥ T ;T, N, B ortonormalne.
56

Wyznaczamy T ′, N ′, B′ w terminach T, N, B:T ′ = κN ;B′ = (T ◦B′)T + (N ◦B′)N + (B ◦B′)B, przy czym
T ◦B′ = T ◦B′ + κN ◦B = T ◦B′ + T ′ ◦B = (T ◦B)′ = 0′ = 0,B ◦B′ = 1
2 (B ◦B)′ = 1′ = 0;
• τ := −N ◦B′ skręcenie (torsja);
czyli B′ = −τN ;N ′ = (T ◦N ′)T + (N ◦N ′)N + (B ◦N ′)B, przy czym
T ◦N ′ = (T ◦N)′ − T ′ ◦N = 0− κ,N ◦N ′ = 1
2(N ◦N)′ = 0,
B ◦N ′ = (B ◦N)−B′ ◦N = 0 + τ ,czyli N ′ = −κT + τB.
Wzory Freneta:
T ′ = κN N ′ = −κT + τB B′ = −τN
Twierdzenie:
γ jest prostą ⇐⇒ κ = 0
γ jest łukiem okręgu ⇐⇒ τ = 0, κ = const
γ jest krzywą płaską ⇐⇒ τ = 0
Dowód. [⇐= – ćwiczenie.]κ = 0 =⇒ T ′ = 0 =⇒ γ′(t) = T = const =⇒ γ(t) = P + tT .
τ = 0 =⇒ B′ = 0 =⇒ B = const;((γ(t)−γ(0))◦B
)′= (γ(t)−γ(0))′◦B +(γ(t)−γ(0))◦B′ = γ′(t)◦B +0 = T ◦B = 0,
więc γ leży w płaszczyźnie prostopadłej do B.
β(t) = γ(t) + 1κN lokalny środek;
β′(t) = γ′(t) + 1κN ′ = T + 1
κ (−κT + τB) = T − T = 0.
Zadania
28.1. Czy istnieje prosta przecinająca krzywą X = (t, t2, t3) w trzech różnych punktach?(Wskazówka: przyjrzyj się rzutom na płaszczyzny współrzędnych.)
28.2. Ile jest ruchów śrubowych przeprowadzających daną helisę (linię śrubową) w siebie?(Jakie mogą one mieć kąty obrotu? Jakie wektory przesunięcia?)
28.3. Pokaż, że jeśli wszystkie proste styczne do danej krzywej przechodzą przez jeden punkt,to ta krzywa jest prostą.
28.4. Zastanów się, dla jakich a, b krzywa (węzeł torusowy) zadana wzorem parametrycznym((R + r cos at) cos bt, (R + r cos at) sin bt, r sin at
)jest naprawdę zawęźlona.
57