Całki niewłaściwe. Funkcje Gamma i B Eulera oraz ich zastosowania
1. CAŁKI KRZYWOLINIOWE NIEZORIENTOWANE
1.1 ŁUKI NA PŁASZCZYŹNIE I W PRZESTRZENI
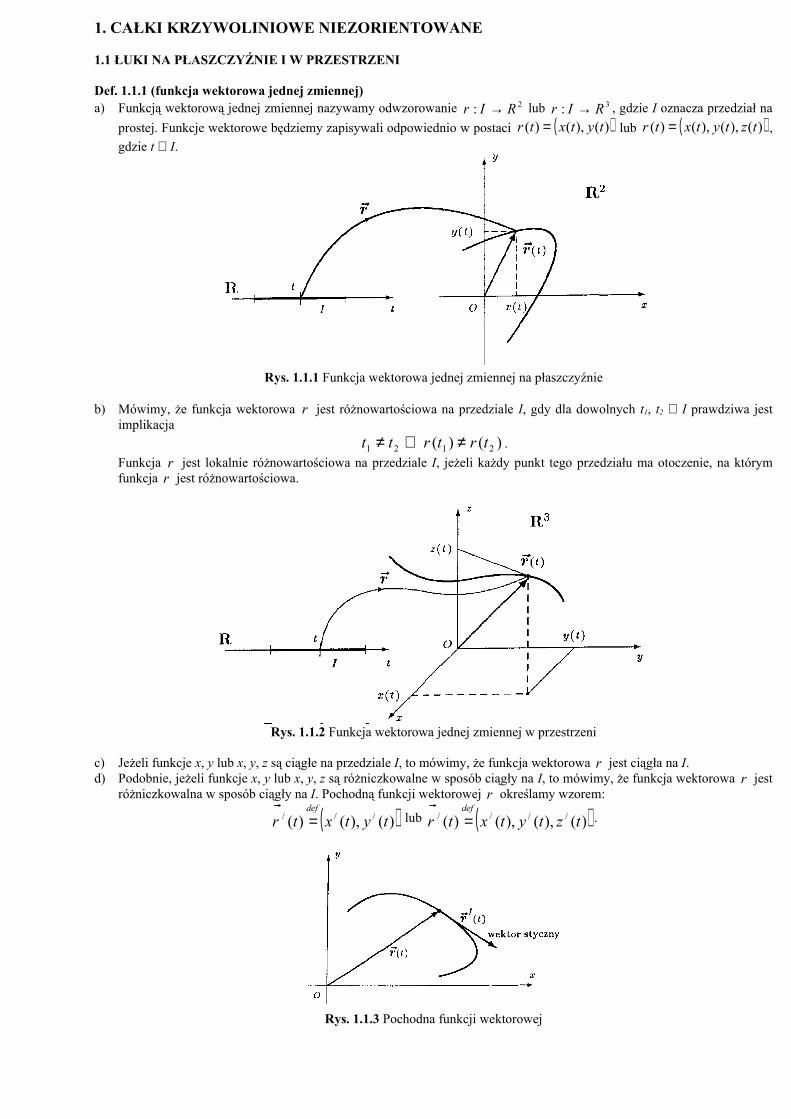
Def. 1.1.1 (funkcja wektorowa jednej zmiennej)a) Funkcją wektorową jednej zmiennej nazywamy odwzorowanie 2: RIr → lub 3: RIr → , gdzie I oznacza przedział na
prostej. Funkcje wektorowe będziemy zapisywali odpowiednio w postaci ( ))(),()( tytxtr = lub ( ))(),(),()( tztytxtr =
, gdzie t ∈ I.
Rys. 1.1.1 Funkcja wektorowa jednej zmiennej na płaszczyźnie
b) Mówimy, że funkcja wektorowa r jest różnowartościowa na przedziale I, gdy dla dowolnych t1, t2 ∈ I prawdziwa jest implikacja
)()( 2121 trtrtt ≠⇒≠ .Funkcja r jest lokalnie różnowartościowa na przedziale I, jeżeli każdy punkt tego przedziału ma otoczenie, na którym funkcja r jest różnowartościowa.
Rys. 1.1.2 Funkcja wektorowa jednej zmiennej w przestrzeni
c) Jeżeli funkcje x, y lub x, y, z są ciągłe na przedziale I, to mówimy, że funkcja wektorowa r jest ciągła na I.d) Podobnie, jeżeli funkcje x, y lub x, y, z są różniczkowalne w sposób ciągły na I, to mówimy, że funkcja wektorowa r jest
różniczkowalna w sposób ciągły na I. Pochodną funkcji wektorowej r określamy wzorem:
( ))(),()( /// tytxtrdef= lub ( ))(),(),()( //// tztytxtr
def= .
Rys. 1.1.3 Pochodna funkcji wektorowej
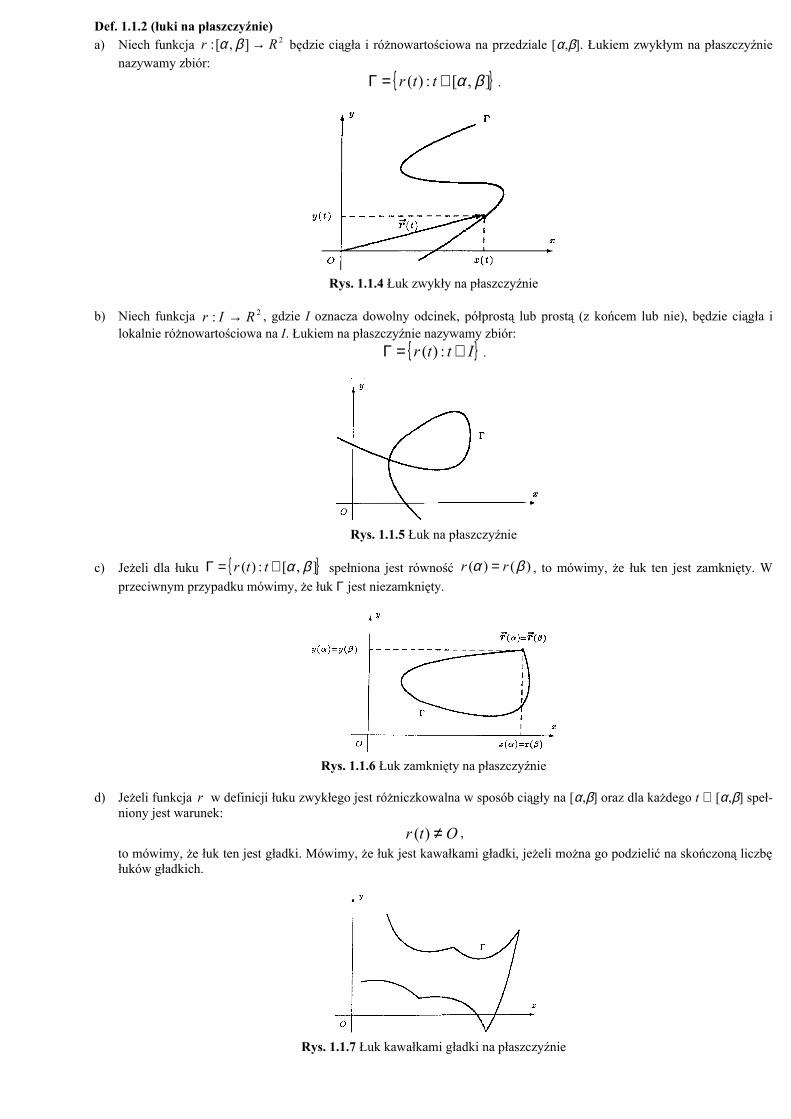
Def. 1.1.2 (łuki na płaszczyźnie)a) Niech funkcja 2],[: Rr →βα
będzie ciągła i różnowartościowa na przedziale [α,β]. Łukiem zwykłym na płaszczyźnie nazywamy zbiór:
{ }],[:)( βα∈=Γ ttr .
Rys. 1.1.4 Łuk zwykły na płaszczyźnie
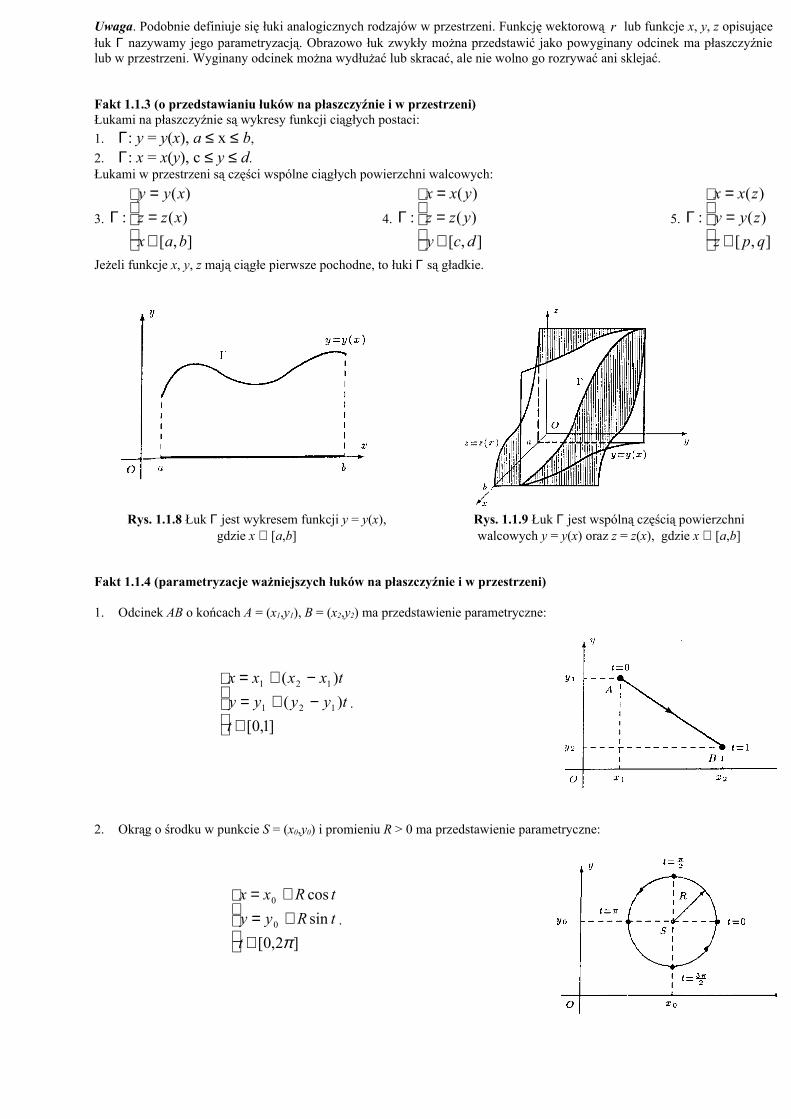
b) Niech funkcja 2: RIr → , gdzie I oznacza dowolny odcinek, półprostą lub prostą (z końcem lub nie), będzie ciągła i lokalnie różnowartościowa na I. Łukiem na płaszczyźnie nazywamy zbiór:
{ }Ittr ∈=Γ :)( .
Rys. 1.1.5 Łuk na płaszczyźnie
c) Jeżeli dla łuku { }],[:)( βα∈=Γ ttr spełniona jest równość )()( βα rr = , to mówimy, że łuk ten jest zamknięty. W przeciwnym przypadku mówimy, że łuk Γ jest niezamknięty.
Rys. 1.1.6 Łuk zamknięty na płaszczyźnie
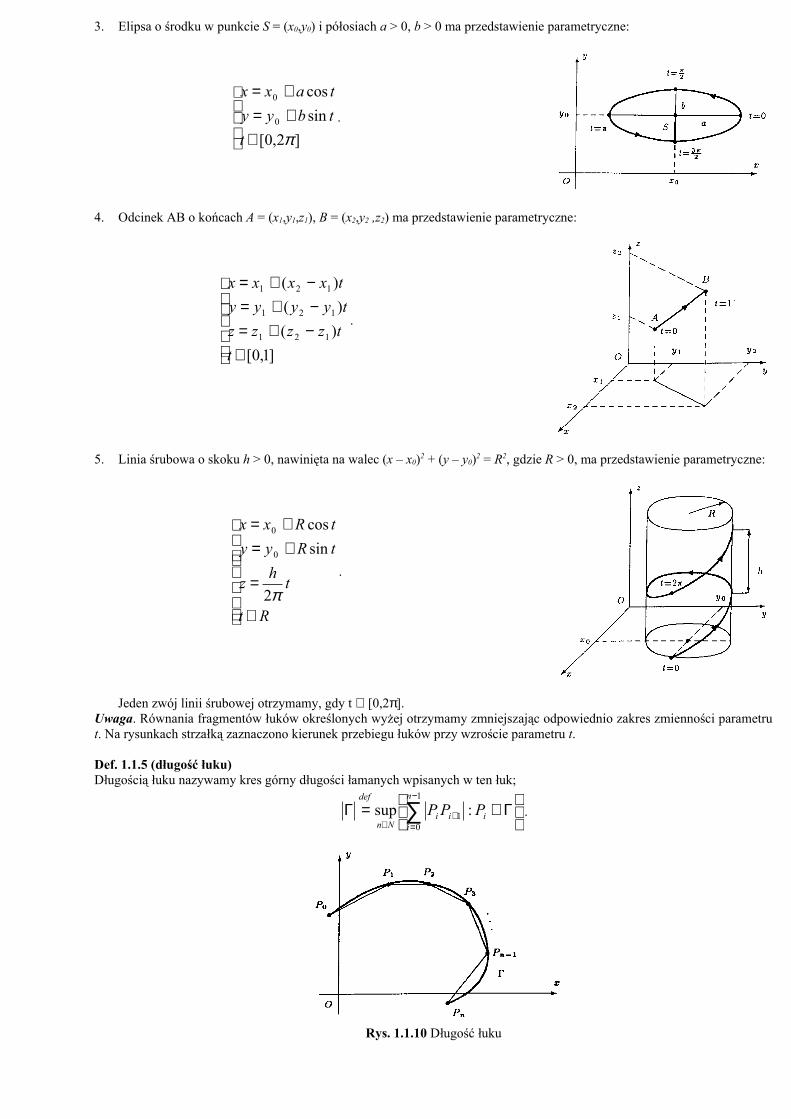
d) Jeżeli funkcja r w definicji łuku zwykłego jest różniczkowalna w sposób ciągły na [α,β] oraz dla każdego t ∈ [α,β] spełniony jest warunek:
Otr ≠)( ,
to mówimy, że łuk ten jest gładki. Mówimy, że łuk jest kawałkami gładki, jeżeli można go podzielić na skończoną liczbę łuków gładkich.
Rys. 1.1.7 Łuk kawałkami gładki na płaszczyźnie
Uwaga. Podobnie definiuje się łuki analogicznych rodzajów w przestrzeni. Funkcję wektorową r lub funkcje x, y, z opisujące łuk Γ nazywamy jego parametryzacją. Obrazowo łuk zwykły można przedstawić jako powyginany odcinek ma płaszczyźnie lub w przestrzeni. Wyginany odcinek można wydłużać lub skracać, ale nie wolno go rozrywać ani sklejać.
Fakt 1.1.3 (o przedstawianiu łuków na płaszczyźnie i w przestrzeni)Łukami na płaszczyźnie są wykresy funkcji ciągłych postaci:1. Γ: y = y(x), a ≤ x ≤ b,2. Γ: x = x(y), c ≤ y ≤ d.Łukami w przestrzeni są części wspólne ciągłych powierzchni walcowych:
3.
∈==
Γ],[
)()(
:bax
xzzxyy
4.
∈==
Γ],[
)()(
:dcyyzzyxx
5.
∈==
Γ],[
)()(
:qpzzyyzxx
Jeżeli funkcje x, y, z mają ciągłe pierwsze pochodne, to łuki Γ są gładkie.
Rys. 1.1.8 Łuk Γ jest wykresem funkcji y = y(x), gdzie x ∈ [a,b]
Rys. 1.1.9 Łuk Γ jest wspólną częścią powierzchni walcowych y = y(x) oraz z = z(x), gdzie x ∈ [a,b]
Fakt 1.1.4 (parametryzacje ważniejszych łuków na płaszczyźnie i w przestrzeni)
1. Odcinek AB o końcach A = (x1,y1), B = (x2,y2) ma przedstawienie parametryczne:
∈−+=−+=
]1,0[)(
)(
121
121
ttyyyy
txxxx.
2. Okrąg o środku w punkcie S = (x0,y0) i promieniu R > 0 ma przedstawienie parametryczne:
∈+=+=
]2,0[sincos
0
0
πttRyytRxx
.
3. Elipsa o środku w punkcie S = (x0,y0) i półosiach a > 0, b > 0 ma przedstawienie parametryczne:
∈+=+=
]2,0[sincos
0
0
πttbyytaxx
.
4. Odcinek AB o końcach A = (x1,y1,z1), B = (x2,y2 ,z2) ma przedstawienie parametryczne:
∈−+=−+=−+=
]1,0[)()(
)(
121
121
121
ttzzzztyyyy
txxxx
.
5. Linia śrubowa o skoku h > 0, nawinięta na walec (x – x0)2 + (y – y0)2 = R2, gdzie R > 0, ma przedstawienie parametryczne:
∈
=
+=+=
Rt
thz
tRyytRxx
π2
sincos
0
0
.
Jeden zwój linii śrubowej otrzymamy, gdy t ∈ [0,2π].Uwaga. Równania fragmentów łuków określonych wyżej otrzymamy zmniejszając odpowiednio zakres zmienności parametru t. Na rysunkach strzałką zaznaczono kierunek przebiegu łuków przy wzroście parametru t.
Def. 1.1.5 (długość łuku)Długością łuku nazywamy kres górny długości łamanych wpisanych w ten łuk;
Γ∈=Γ ∑
−
=+
∈
1
01 :sup
n
iiii
Nn
defPPP .
Rys. 1.1.10 Długość łuku

Tw. 1.1.6 (długość łuku)Niech Γ = {(x(t), y(t)) : α ≤ t ≤ β} będzie łukiem gładkim na płaszczyźnie. Wtedy długość tego łuku wyraża się wzorem:
[ ] [ ]∫ +=Γβ
α
dttytx 2/2/ )()( .
Podobnie, niech Γ = {(x(t), y(t), z(t)) : α ≤ t ≤ β} będzie łukiem gładkim w przestrzeni. Wtedy długość tego łuku wyraża się wzorem:
[ ] [ ] [ ]∫ ++=Γβ
α
dttztytx 2/2/2/ )()()( .
Uwaga. Jeżeli łuk Γ jest wykresem funkcji y = y(x), a ≤ x ≤ b, to jego długość wyraża się wzorem:
[ ]∫ +=Γb
a
dxxy 2/ )(1 .
1.2 DEFINICJE I WŁASNOŚCI CAŁEK KRZYWOLINIOWYCH NIEZORIENTOWANYCH
Oznaczenia w definicji całki krzywoliniowej niezorientowanejNiech Γ = {(x(t), y(t)) : t ∈ [α,β]} będzie łukiem gładkim na płaszczyźnie. Wprowadzamy następujące oznaczenia:P = {t0, t1, ..., tn}, gdzie α = t0 < t1 < … < tn = β – podział odcinka [α,β] na n ∈ N odcinków;∆tk = tk – tk-1 – długość k-tego odcinka podziału P, 1 ≤ k ≤ n;δ(P) = max{∆tk: 1 ≤ k ≤ n } – średnica podziału P;
{ }∗∗∗=Ξ nttt ,,, 21 , gdzie ],[ 1 kkk ttt −∗ ∈ dla 1 ≤ k ≤ n – zbiór punktów pośrednich podziału P.
Ak = (x(tk),y(tk)) – punkty podziału łuku Γ indukowane przez podział P, 0 ≤ k ≤ n;( ))(),(),( ∗∗∗∗∗ == kkkkk tytxyxA – punkty pośrednie na łuku Ak-1Ak indukowane przez wybór punktów pośrednich podziału P, 1 ≤ k
≤ n;∆lk – długość łuku Ak-1Ak ,1 ≤ k ≤ n.
Rys. 1.2.1 Podział odcinka [α,β] i podział łuku Γ indukowany przez podział tego odcinka
Def. 1.2.1 (całka krzywoliniowa niezorientowana)Niech f będzie funkcją dwóch zmiennych określoną i ograniczoną na łuku gładkim Γ. Całkę krzywoliniową niezorientowaną z funkcji f po łuku Γ definiujemy wzorem:
∑∫=
∗∗
→Γ
∆=n
kkkk
deflyxfdlyxf
10)(),(lim),(
Pδ,
o ile granica po prawej stronie znaku równości nie zależy od sposobu podziału P odcinka [α,β], ani od sposobu wyboru punktów pośrednich Ξ.
Uwaga. Wartość całki krzywoliniowej nie zależy od wybranej parametryzacji łuku. Całkę krzywoliniową niezorientowaną z funkcji trzech zmiennych po łuku położonym w przestrzeni definiujemy analogicznie. Całkę krzywoliniową niezorientowaną
na płaszczyźnie jak i w przestrzeni oznaczamy krótko symbolem ∫Γ
dlf .

Rys. 1.2.2 Ilustracja do definicji całki krzywoliniowej niezorientowanej
Def. 1.2.2 (całka krzywoliniowa po łuku kawałkami gładkim)Niech Γ będzie łukiem kawałkami gładkim złożonym z łuków gładkich Γ1, Γ2, …, Γm oraz niech f będzie funkcją określoną i ograniczoną na łuku Γ. Całkę krzywoliniową niezorientowaną z funkcji f po łuku Γ definiujemy wzorem:
∫∫∫∫ΓΓΓΓ
+++=m
dlfdlfdlfdlfdef
...21
,
o ile całki po prawej stronie znaku równości istnieją.
Tw. 1.2.3 (liniowość całki krzywoliniowej niezorientowanej)Jeżeli istnieją całki krzywoliniowe niezorientowane z funkcji f i g po kawałkami gładkim łuku Γ i c ∈ R, to:a) istnieje całka krzywoliniowa niezorientowana z funkcji f + g po łuku Γ oraz
∫∫∫ΓΓΓ
+=+ dlgdlfdlgf )( ,
b) istnieje całka krzywoliniowa niezorientowana z funkcji cf po łuku Γ oraz( ) ∫∫
ΓΓ
= dlfcdlcf .
Def 1.2.4 (całka krzywoliniowa niezorientowana z funkcji wektorowej)Niech Γ będzie łukiem kawałkami gładkim na płaszczyźnie oraz niech funkcje P i Q będą całkowalne na Γ. Całkę krzywoliniową niezorientowaną po łuku Γ z funkcji wektorowej ( )),(),,(),( yxQyxPycF =
określamy wzorem:
= ∫∫∫
ΓΓΓ
dlyxQdlyxPdlyxFdef
),(,),(),(
.
Uwaga. Podobnie określa się całkę krzywoliniową niezorientowaną z funkcji wektorowej ( )),(),,(),,(),( yxRyxQyxPycF =
po łuku położonym na płaszczyźnie xOy oraz całkę krzywoliniową niezorientowaną z funkcji wektorowej
( )),(),,(),,(),( yxRyxQyxPycF =
po łuku położonym w przestrzeni.
1.3 ZAMIANA CAŁKI KRZYWOLINIOWEJ NIEZORIENTOWANEJ NA CAŁKĘ POJEDYNCZĄ
Tw. 1.3.1 (o zamianie całki krzywoliniowej niezorientowanej na całkę pojedynczą)a) Jeżeli
1. łuk Γ = {(x(t), y(t)) : t ∈ [α,β]} jest gładki i niezamknięty,2. funkcja f jest ciągła na łuku Γ,
to
( ) [ ] [ ]∫∫ +=Γ
β
α
dttytxtytxfdlyxf 2/2/ )()()(),(),( .
b) Podobnie, jeżeli1. łuk Γ = {(x(t), y(t), z(t)) : t ∈ [α,β]} jest gładki i niezamknięty,2. funkcja f jest ciągła na łuku Γ,
to
( ) [ ] [ ] [ ]∫∫ ++=Γ
β
α
dttztytxtztytxfdlzyxf 2/2/2/ )()()()(),(),(),,( .
Uwaga. W zapisie wektorowym powyższe wzory przyjmują jednolitą postać
( )∫∫ =Γ
β
α
dttrtrfdlrf )()()( /.
Jeżeli funkcja f jest ciągła na łuku gładkim Γ opisanym równaniem y = y(x), gdzie a ≤ x ≤ b, to
( ) [ ]∫∫ +=Γ
b
a
dxxyxyxfdlyxf 2/ )(1)(,),( .
1.4 ZASTOSOWANIA CAŁEK KRZYWOLINIOWYCH NIEZORIENTOWANYCH
Fakt 1.4.1 (zastosowania w geometrii)1. Długość łuku Γ na płaszczyźnie lub w przestrzeni wyraża się wzorem:
∫Γ
=Γ dl .
2. Niech Σ oznacza powierzchnię boczną walca o tworzących przechodzących przez łuk Γ ⊂ R2. Tworzące walca są równoległe do osi Oz i w punkcie (x,y) ∈ Γ mają długość f(x,y) ≥ 0. Wtedy pole powierzchni Σ wyraża się wzorem:
∫Γ
=Σ dlyxf ),( .
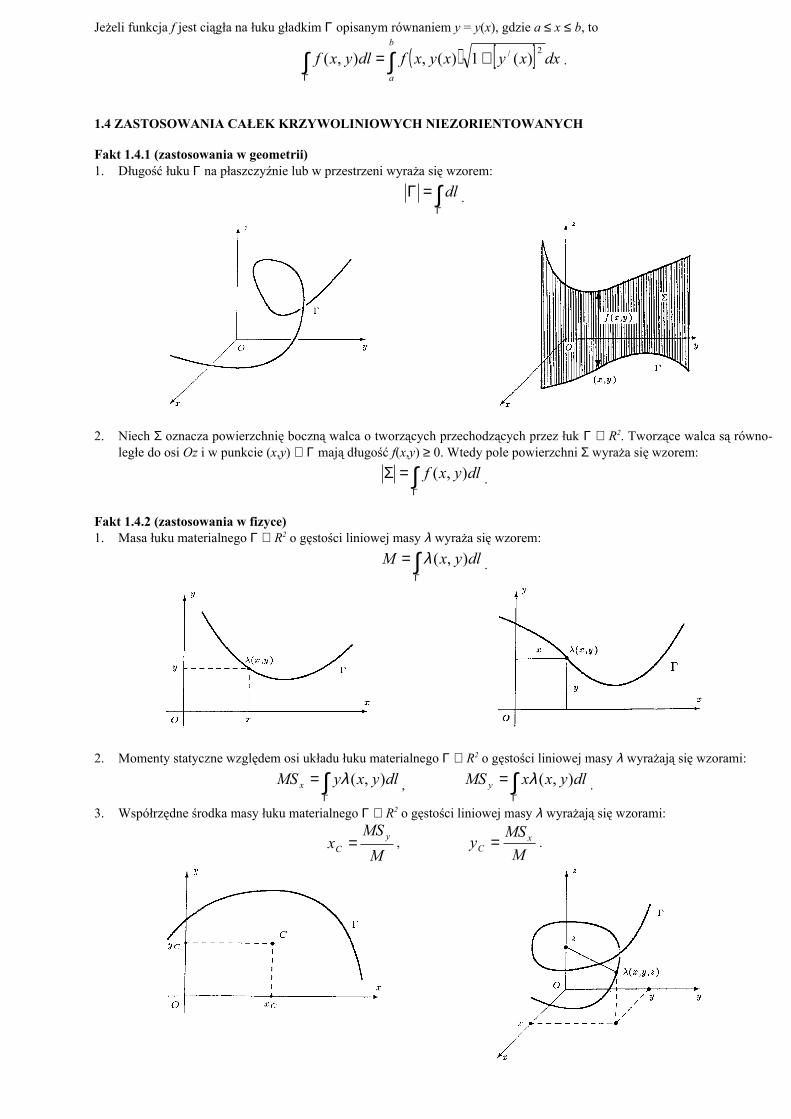
Fakt 1.4.2 (zastosowania w fizyce)1. Masa łuku materialnego Γ ⊂ R2 o gęstości liniowej masy λ wyraża się wzorem:
∫Γ
= dlyxM ),(λ .
2. Momenty statyczne względem osi układu łuku materialnego Γ ⊂ R2 o gęstości liniowej masy λ wyrażają się wzorami:
∫Γ
= dlyxyMS x ),(λ , ∫Γ
= dlyxxMS y ),(λ .
3. Współrzędne środka masy łuku materialnego Γ ⊂ R2 o gęstości liniowej masy λ wyrażają się wzorami:
MMS
x yC = ,
MMS
y xC = .
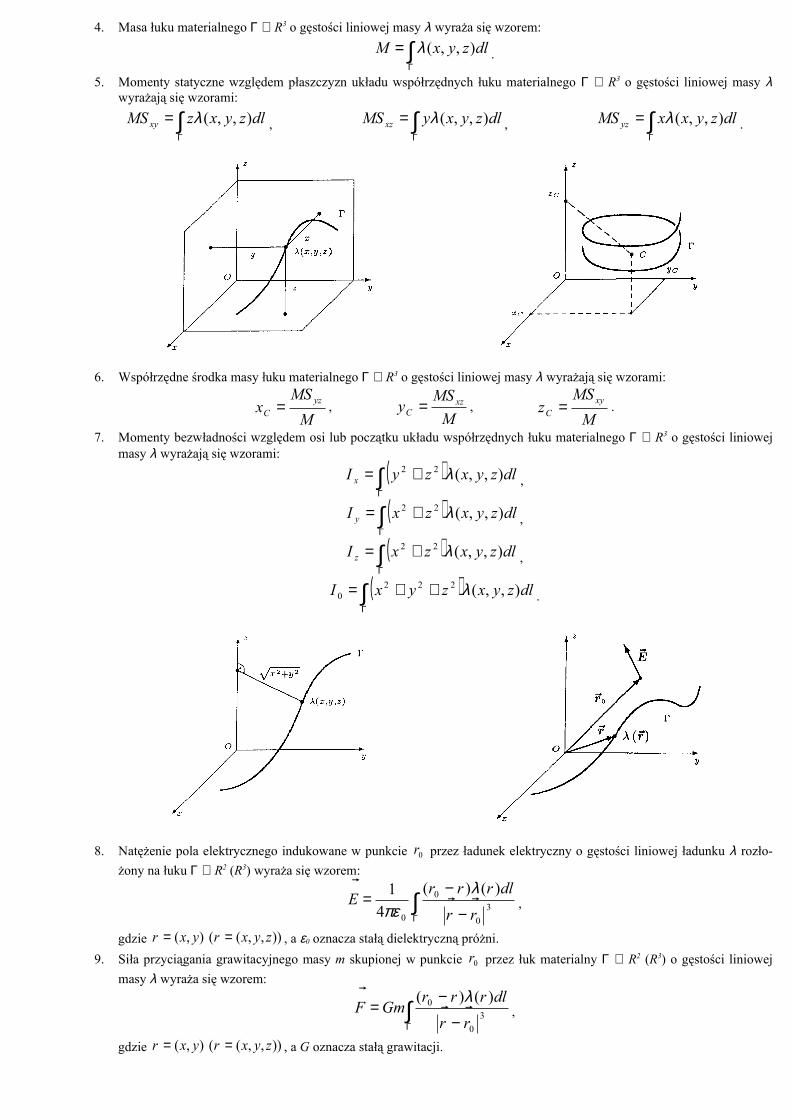
4. Masa łuku materialnego Γ ⊂ R3 o gęstości liniowej masy λ wyraża się wzorem:
∫Γ
= dlzyxM ),,(λ .
5. Momenty statyczne względem płaszczyzn układu współrzędnych łuku materialnego Γ ⊂ R3 o gęstości liniowej masy λ wyrażają się wzorami:
∫Γ
= dlzyxzMS xy ),,(λ , ∫Γ
= dlzyxyMS xz ),,(λ , ∫Γ
= dlzyxxMS yz ),,(λ .
6. Współrzędne środka masy łuku materialnego Γ ⊂ R3 o gęstości liniowej masy λ wyrażają się wzorami:
MMS
x yzC = ,
MMS
y xzC = ,
MMS
z xyC = .
7. Momenty bezwładności względem osi lub początku układu współrzędnych łuku materialnego Γ ⊂ R3 o gęstości liniowej masy λ wyrażają się wzorami:
( )∫Γ
+= dlzyxzyI x ),,(22 λ ,
( )∫Γ
+= dlzyxzxI y ),,(22 λ ,
( )∫Γ
+= dlzyxzxI z ),,(22 λ ,
( )∫Γ
++= dlzyxzyxI ),,(2220 λ .
8. Natężenie pola elektrycznego indukowane w punkcie 0r
przez ładunek elektryczny o gęstości liniowej ładunku λ rozłożony na łuku Γ ⊂ R2 (R3) wyraża się wzorem:
∫Γ −
−= 3
0
0
0
)()(4
1rr
dlrrrE
λπε ,
gdzie )),,((),( zyxryxr == , a ε0 oznacza stałą dielektryczną próżni.
9. Siła przyciągania grawitacyjnego masy m skupionej w punkcie 0r
przez łuk materialny Γ ⊂ R2 (R3) o gęstości liniowej masy λ wyraża się wzorem:
∫Γ −
−= 3
0
0 )()(
rrdlrrr
GmF
λ,
gdzie )),,((),( zyxryxr == , a G oznacza stałą grawitacji.
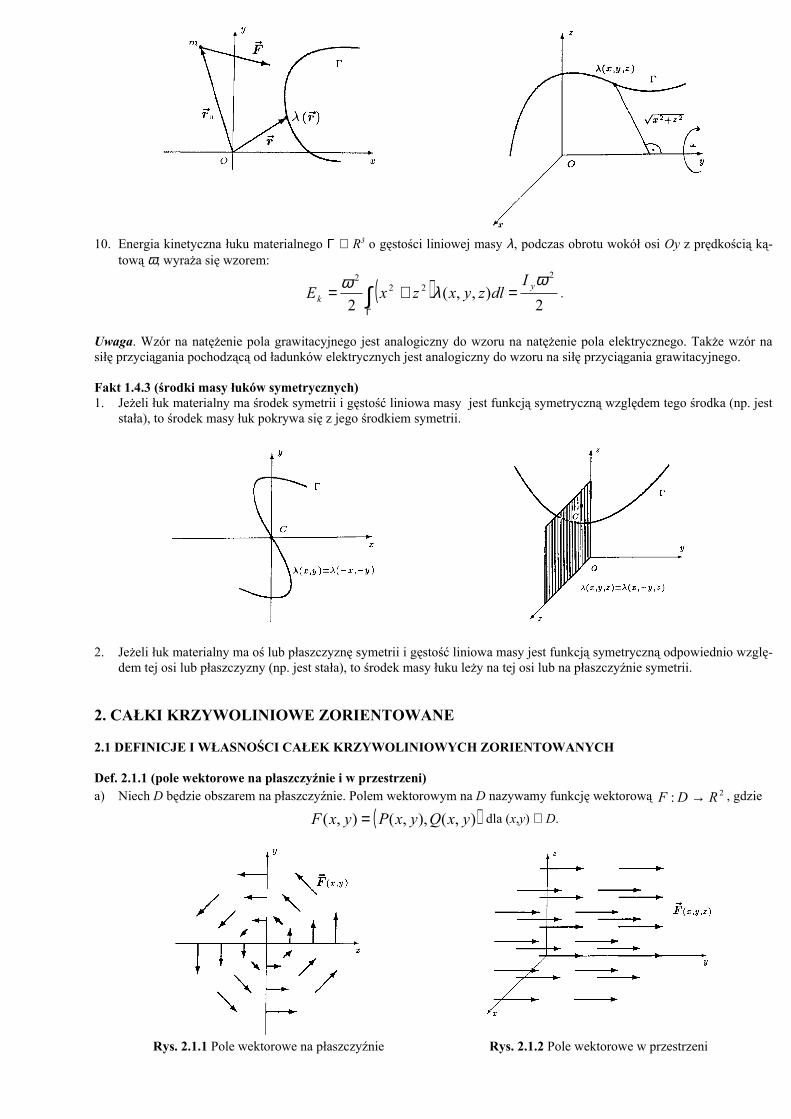
10. Energia kinetyczna łuku materialnego Γ ⊂ R3 o gęstości liniowej masy λ, podczas obrotu wokół osi Oy z prędkością kątową ω, wyraża się wzorem:
( )2
),,(2
222
2 ωλω y
k
IdlzyxzxE =+= ∫
Γ
.
Uwaga. Wzór na natężenie pola grawitacyjnego jest analogiczny do wzoru na natężenie pola elektrycznego. Także wzór na siłę przyciągania pochodzącą od ładunków elektrycznych jest analogiczny do wzoru na siłę przyciągania grawitacyjnego.
Fakt 1.4.3 (środki masy łuków symetrycznych)1. Jeżeli łuk materialny ma środek symetrii i gęstość liniowa masy jest funkcją symetryczną względem tego środka (np. jest
stała), to środek masy łuk pokrywa się z jego środkiem symetrii.
2. Jeżeli łuk materialny ma oś lub płaszczyznę symetrii i gęstość liniowa masy jest funkcją symetryczną odpowiednio względem tej osi lub płaszczyzny (np. jest stała), to środek masy łuku leży na tej osi lub na płaszczyźnie symetrii.
2. CAŁKI KRZYWOLINIOWE ZORIENTOWANE
2.1 DEFINICJE I WŁASNOŚCI CAŁEK KRZYWOLINIOWYCH ZORIENTOWANYCH
Def. 2.1.1 (pole wektorowe na płaszczyźnie i w przestrzeni)a) Niech D będzie obszarem na płaszczyźnie. Polem wektorowym na D nazywamy funkcję wektorową 2: RDF →
, gdzie
( )),(),,(),( yxQyxPyxF =
dla (x,y) ∈ D.
Rys. 2.1.1 Pole wektorowe na płaszczyźnie Rys. 2.1.2 Pole wektorowe w przestrzeni
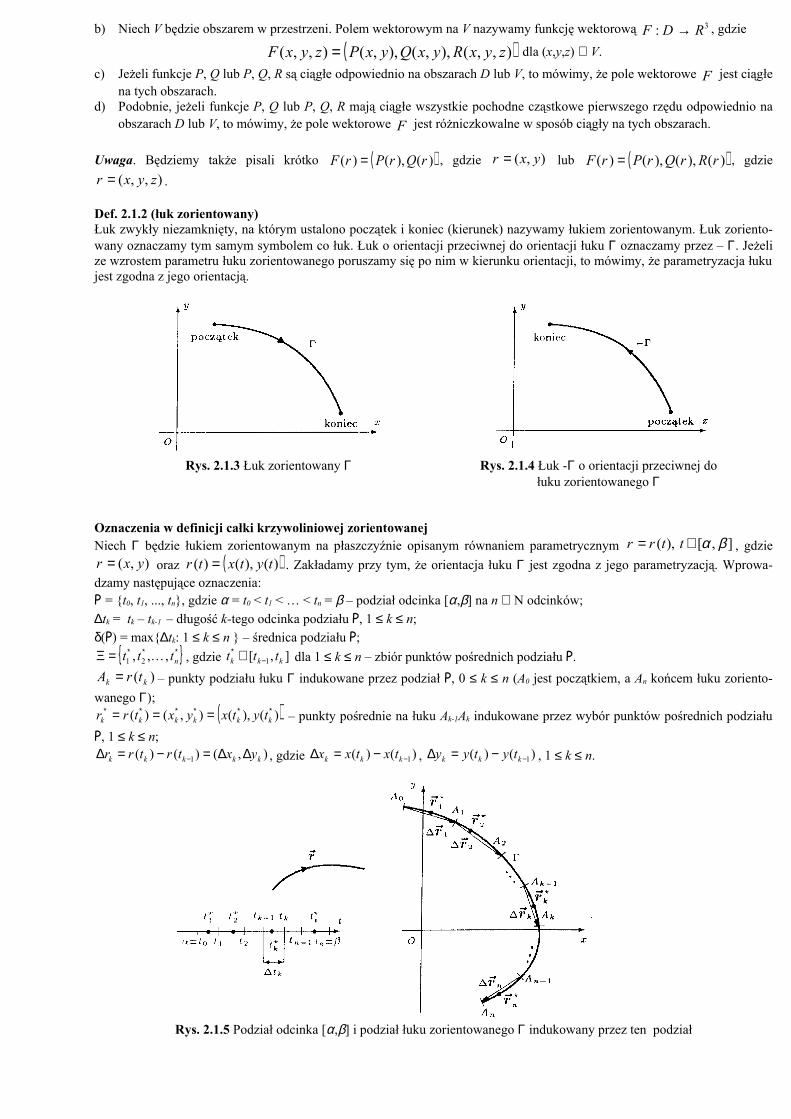
b) Niech V będzie obszarem w przestrzeni. Polem wektorowym na V nazywamy funkcję wektorową 3: RDF →
, gdzie
( )),,(),,(),,(),,( zyxRyxQyxPzyxF =
dla (x,y,z) ∈ V.
c) Jeżeli funkcje P, Q lub P, Q, R są ciągłe odpowiednio na obszarach D lub V, to mówimy, że pole wektorowe F
jest ciągłe na tych obszarach.
d) Podobnie, jeżeli funkcje P, Q lub P, Q, R mają ciągłe wszystkie pochodne cząstkowe pierwszego rzędu odpowiednio na obszarach D lub V, to mówimy, że pole wektorowe F
jest różniczkowalne w sposób ciągły na tych obszarach.
Uwaga. Będziemy także pisali krótko ( ))(),()( rQrPrF = , gdzie ),( yxr = lub ( ))(),(),()( rRrQrPrF
= , gdzie ),,( zyxr = .
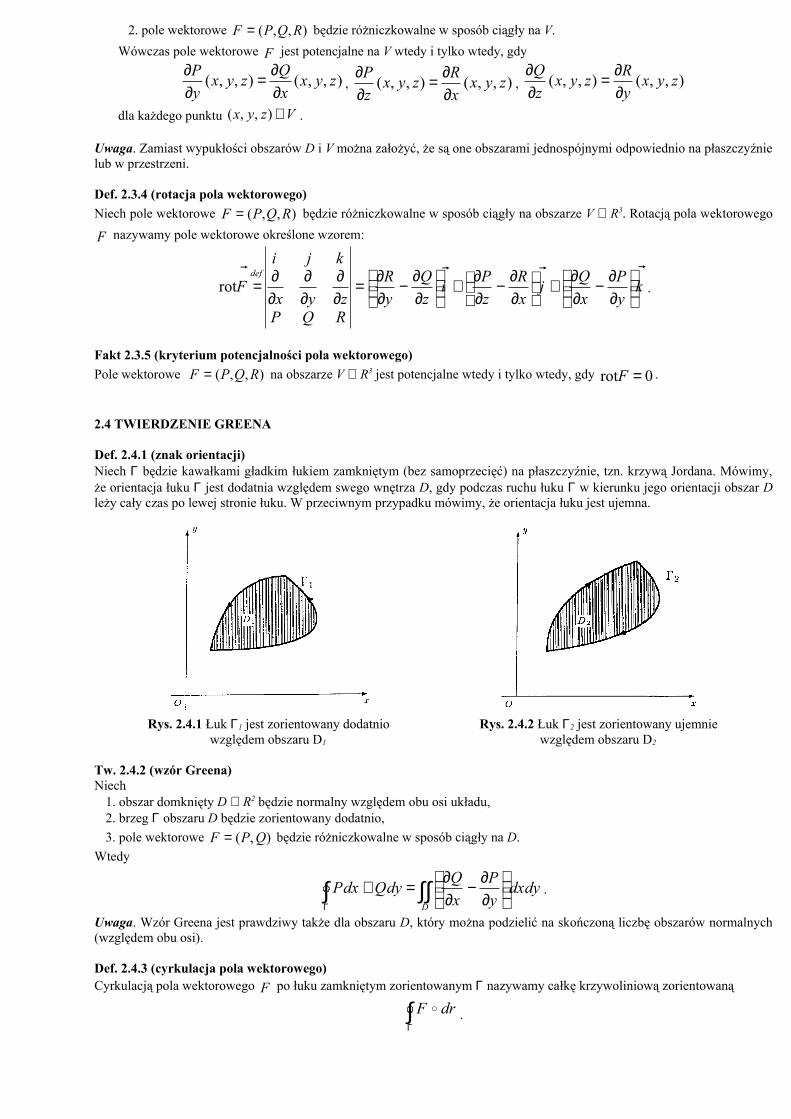
Def. 2.1.2 (łuk zorientowany)Łuk zwykły niezamknięty, na którym ustalono początek i koniec (kierunek) nazywamy łukiem zorientowanym. Łuk zorientowany oznaczamy tym samym symbolem co łuk. Łuk o orientacji przeciwnej do orientacji łuku Γ oznaczamy przez – Γ. Jeżeli ze wzrostem parametru łuku zorientowanego poruszamy się po nim w kierunku orientacji, to mówimy, że parametryzacja łuku jest zgodna z jego orientacją.
Rys. 2.1.3 Łuk zorientowany Γ Rys. 2.1.4 Łuk -Γ o orientacji przeciwnej do łuku zorientowanego Γ
Oznaczenia w definicji całki krzywoliniowej zorientowanejNiech Γ będzie łukiem zorientowanym na płaszczyźnie opisanym równaniem parametrycznym ],[),( βα∈= ttrr
, gdzie ),( yxr = oraz ( ))(),()( tytxtr =
. Zakładamy przy tym, że orientacja łuku Γ jest zgodna z jego parametryzacją. Wprowadzamy następujące oznaczenia:P = {t0, t1, ..., tn}, gdzie α = t0 < t1 < … < tn = β – podział odcinka [α,β] na n ∈ N odcinków;∆tk = tk – tk-1 – długość k-tego odcinka podziału P, 1 ≤ k ≤ n;δ(P) = max{∆tk: 1 ≤ k ≤ n } – średnica podziału P;
{ }∗∗∗=Ξ nttt ,,, 21 , gdzie ],[ 1 kkk ttt −∗ ∈ dla 1 ≤ k ≤ n – zbiór punktów pośrednich podziału P.
)( kk trA = – punkty podziału łuku Γ indukowane przez podział P, 0 ≤ k ≤ n (A0 jest początkiem, a An końcem łuku zorientowanego Γ);
( ))(),(),()( ∗∗∗∗∗∗ === kkkkkk tytxyxtrr – punkty pośrednie na łuku Ak-1Ak indukowane przez wybór punktów pośrednich podziału
P, 1 ≤ k ≤ n;),()()( 1 kkkkk yxtrtrr ∆∆=−=∆ −
, gdzie )()( 1−−=∆ kkk txtxx , )()( 1−−=∆ kkk tytyy , 1 ≤ k ≤ n.
Rys. 2.1.5 Podział odcinka [α,β] i podział łuku zorientowanego Γ indukowany przez ten podział

Def. 2.1.3 (całka krzywoliniowa zorientowana)Niech ),( QPF =
będzie polem wektorowym określonym na łuku zorientowanym Γ ⊂ R2. Całkę krzywoliniową zorientowaną
z pola wektorowego F
po łuku Γ definiujemy wzorem:
( )∑∫=
∗∗∗∗
→Γ
∆+∆=+n
kkkkkkk
defyyxQxyxPdyyxQdxyxP
10)(),(),(lim),(),(
Pδ,
o ile granica po prawej stronie znaku równości istnieje oraz nie zależy od sposobu podziału P przedziału [α,β], ani od sposobu
wyboru punktów pośrednich Ξ. Powyższą całkę oznaczamy krótko przez ∫Γ
+ dyQdxP .
Uwaga. Całkę krzywoliniową zorientowaną z pola wektorowego ),,( RQPF =
po łuku Γ położonym w przestrzeni definiujemy analogicznie i oznaczamy symbolem:
∫Γ
++ dzzyxRdyzyxQdxzyxP ),,(),,(),,( lub krótko ∫Γ
++ dzRdyQdxP .
W zapisie wektorowym definicja całki krzywoliniowej zorientowanej z pola wektorowego ),( QPF =
lub pola wektorowego
),,( RQPF =
po łuku zorientowanym Γ położonym odpowiednio na płaszczyźnie lub w przestrzeni przyjmuje jednolitą formę:
∑∫=
∗∗
→Γ
∆=n
kkk
defrrFrdrF
10)()(lim)(
Pδ
,
gdzie ),( dydxrddef= lub ),,( dzdydxrd
def
= . Całkę krzywoliniową z pola wektorowego F
po łuku Γ oznaczamy też krótko
symbolem ∫Γ
rdF
.
Rys. 2.1.6 Ilustracja do definicji całki krzywoliniowej zorientowanej w formie wektorowej
Def. 2.1.4 (całka krzywoliniowa po sumie łuków zorientowanych)Niech łuk zorientowany Γ będzie sumą łuków niezamkniętch zorientowanych Γ1, Γ2, …, Γm, przy czym koniec łuku Γk jest początkiem łuku Γk+1, 1 ≤ k ≤ m – 1. Ponadto niech F
będzie polem wektorowym określonym na łuku Γ. Całkę krzywoli
niową zorientowaną z pola F
po łuku Γ określamy wzorem:
∫∫∫∫ΓΓΓΓ
+++=m
rdFrdFrdFrdFdef
...21
,
o ile całki po prawej stronie znaku równości istnieją.
Uwaga. Jeżeli łuk zorientowany na płaszczyźnie jest zamknięty, to wtedy piszemy ∫ w miejsce ∫ .
Rys. 2.1.7 Ilustracje do definicji całki krzywoliniowej zorientowanej po sumie łuków
Tw. 2.1.5 (liniowość całki krzywoliniowej zorientowanej)Jeżeli istnieją całki krzywoliniowe z pól wektorowych F
i G
po kawałkami gładkim łuku zorientowanym Γ oraz jeżeli c jest
stałą dowolną, to:

a) istnieje całka krzywoliniowa z pola wektorowego GF
+ po łuku Γ oraz
( ) ∫∫∫ΓΓΓ
+=+ rdGrdFrdGF
,
b) istnieje całka z pola wektorowego Fc
po łuku Γ oraz
( ) ∫∫ΓΓ
= rdFcrdFc
,
c) istnieje całka krzywoliniowa z pola wektorowego F
po łuku o orientacji przeciwnej – Γ oraz
∫∫ΓΓ−
−= rdFrdF
.
Tw. 2.1.6 (zależność między całkami krzywoliniowymi)Niech pole wektorowe ),( QPF =
będzie ciągłe na łuku gładkim Γ. Wtedy
[ ]∫∫ΓΓ
+=+ dlyxyxQyxyxPdyyxQdxyxP ),(cos),(),(cos),(),(),( βα ,
gdzie α(x,y) oznacza kąt między wektorem stycznym do łuku Γ w punkcie (x,y) a dodatnią częścią osi Ox, natomiast β(x,y) oznacza kąt między tym samym wektorem i dodatnią częścią osi Oy. Zakładamy przy tym, że zwrot wektora stycznego jest zgodny z orientacją łuku Γ.Uwaga. Prawdziwa jest także analogiczna równość dla całek krzywoliniowych po łuku położonym w przestrzeni. Równości te niektórzy autorzy przyjmują jako definicję całki krzywoliniowej zorientowanej.
Rys. 2.1.8 Ilustracja do twierdzenia o zależności między dwoma rodzajami całek krzywoliniowych
2.2 ZAMIANA CAŁKI KRZYWOLINIOWEJ ZORIENTOWANEJ NA CAŁKĘ POJEDYNCZĄ
Tw. 2.2.1 (o zamianie całki krzywoliniowej na całkę pojedynczą)a) Jeżeli
1. łuk Γ = {(x(t), y(t)) : t ∈ [α,β]} jest niezamknięty i gładki,2. orientacja łuku Γ jest zgodna z jego polaryzacją,3. pole wektorowe ),( QPF =
jest ciągłe na Γ,
to
( ) ( )[ ]∫∫ +=+Γ
β
α
dttytytxQtxtytxPdyyxQdxyxP )()(),()()(),(),(),( // .
b) Podobnie, jeżeli1. łuk Γ = {(x(t), y(t), z(t)) : t ∈ [α,β]}jest niezamknięty i gładki,2. orientacja łuku Γ jest zgodna z jego polaryzacją,3. pole wektorowe ),,( RQPF =
jest ciągłe na Γ,
to
( ) ( ) ( )[ ]∫
∫
++=
=++Γ
β
α
dttztztytxRtytztytxQtxtztytxP
dzzyxQdyzyxQdxzyxP
)()(),(),()()(),(),()()(),(),(
),,(),,(),,(
///.
Uwaga. Powyższe wzory w formie wektorowej przyjmują jednolitą postać:
( )[ ]∫∫ =Γ
β
α
dttrtrFrdrF )()()( /
,
gdzie )(trr = jest parametryzacją łuku Γ oraz ( ))(),()( /// tytxtr = lub ( ))(),(),()( //// tztytxtr =
.

Jeżeli pole wektorowe ),( QPF =
jest ciągłe na łuku gładkim Γ opisanym równaniem y = y(x), gdzie a ≤ x ≤ b i orientacja łuku Γ jest zgodna ze wzrostem zmiennej x, to
( ) ( )[ ]∫∫ +=+Γ
b
a
dxxyxyxQxyxPdyyxQdxyxP )()(,)(,),(),( / .
2.3 NIEZALEŻNOŚĆ CAŁKI OD DROGI CAŁKOWANIA
Def. 2.3.1 (pole potencjalne, potencjał pola)Pole wektorowe F
określone na obszarze D nazywamy polem potencjalnym, gdy istnieje funkcja U: D → R taka, że
UF grad=
.
Funkcję U nazywamy potencjałem pola wektorowego F
.
Uwaga. Dla pola wektorowego na płaszczyźnie ),( QPF =
powyższy warunek ma postać
yUQ
xUP
∂∂=
∂∂= , .
Podobnie, dla pola wektorowego w przestrzeni ),,( RQPF =
, mamy
zUR
yUQ
xUP
∂∂=
∂∂=
∂∂= ,, .
Tw. 2.3.2 (całka krzywoliniowa z pola potencjalnego)a) Niech
1. pole wektorowe ),( QPF =
będzie ciągłe na obszarze D ⊂ R2,2. pole wektorowe F
będzie potencjalne na obszarze D z potencjałem U.
Wtedy
),(),(),(),(),( 1122),(
),(22
11yxUyxUyxUdyyxQdxyxP yx
yxBA
−==+∫ ,
gdzie BA
jest dowolnym zorientowanym kawałkami gładkim łukiem o początku w punkcie A = (x1,y1) i końcu w punkcie B = (x2,y2), całkowicie zawartym w obszarze D.
b) Podobnie, niech1. pole wektorowe ),,( RQPF =
będzie ciągłe na obszarze V ⊂ R3,
2. pole wektorowe F
będzie potencjalne na obszarze V z potencjałem U.Wtedy
),,(),,(),,(),,(),,(),,( 111222),,(
),,(222
111zyxUzyxUzyxUdzzyxRdyzyxQdxzyxP zyx
zyxBA
−==++∫ ,
gdzie BA
jest dowolnym zorientowanym kawałkami gładkim łukiem o początku w punkcie A = (x1,y1,z1) i końcu w punkcie B = (x1,y1,z1), całkowicie zawartym w obszarze V.
Uwaga. W formie wektorowej powyższe wzory przyjmują jednolitą postać:
)()()( AUBUrUrdU B
ABA
−==∫
grad .
Inaczej mówiąc, całka zorientowana w polu potencjalnym nie zależy od drogi całkowania i jest równa różnicy potencjałów w punktach końcowym i początkowym drogi całkowania. W szczególności w polu potencjalnym F
mamy
∫Γ
= 0rdF
,
gdzie Γ jest dowolnym łukiem zamkniętym zawartym w rozważanym obszarze.
Tw. 2.3.3 (warunek konieczny i wystarczający potencjalności pola)a) Niech
1. obszar D ⊂ R2 będzie wypukły,2. pole wektorowe ),( QPF =
będzie różniczkowalne w sposób ciągły na D.
Wówczas pole wektorowe F
jest potencjalne na D wtedy i tylko wtedy, gdy
),(),( yxxQyx
yP
∂∂=
∂∂
dla każdego punktu Dyx ∈),( .
b) Niech1. obszar V ⊂ R3 będzie wypukły,
2. pole wektorowe ),,( RQPF =
będzie różniczkowalne w sposób ciągły na V.Wówczas pole wektorowe F
jest potencjalne na V wtedy i tylko wtedy, gdy
),,(),,( zyxxQzyx
yP
∂∂=
∂∂
, ),,(),,( zyxxRzyx
zP
∂∂=
∂∂
, ),,(),,( zyxyRzyx
zQ
∂∂=
∂∂
dla każdego punktu Vzyx ∈),,( .
Uwaga. Zamiast wypukłości obszarów D i V można założyć, że są one obszarami jednospójnymi odpowiednio na płaszczyźnie lub w przestrzeni.
Def. 2.3.4 (rotacja pola wektorowego)Niech pole wektorowe ),,( RQPF =
będzie różniczkowalne w sposób ciągły na obszarze V ⊂ R3. Rotacją pola wektorowego
F
nazywamy pole wektorowe określone wzorem:
kyP
xQj
xR
zPi
zQ
yR
RQPzyx
kji
Fdef
∂∂−
∂∂+
∂∂−
∂∂+
∂∂−
∂∂=
∂∂
∂∂
∂∂=rot .
Fakt 2.3.5 (kryterium potencjalności pola wektorowego)Pole wektorowe ),,( RQPF =
na obszarze V ⊂ R3 jest potencjalne wtedy i tylko wtedy, gdy 0rot =F
.
2.4 TWIERDZENIE GREENA
Def. 2.4.1 (znak orientacji)Niech Γ będzie kawałkami gładkim łukiem zamkniętym (bez samoprzecięć) na płaszczyźnie, tzn. krzywą Jordana. Mówimy, że orientacja łuku Γ jest dodatnia względem swego wnętrza D, gdy podczas ruchu łuku Γ w kierunku jego orientacji obszar D leży cały czas po lewej stronie łuku. W przeciwnym przypadku mówimy, że orientacja łuku jest ujemna.
Rys. 2.4.1 Łuk Γ1 jest zorientowany dodatnio względem obszaru D1
Rys. 2.4.2 Łuk Γ2 jest zorientowany ujemnie względem obszaru D2
Tw. 2.4.2 (wzór Greena)Niech
1. obszar domknięty D ⊂ R2 będzie normalny względem obu osi układu,2. brzeg Γ obszaru D będzie zorientowany dodatnio,3. pole wektorowe ),( QPF =
będzie różniczkowalne w sposób ciągły na D.
Wtedy
∫∫∫
∂∂−
∂∂=+
Γ D
dydxyP
xQdyQdxP .
Uwaga. Wzór Greena jest prawdziwy także dla obszaru D, który można podzielić na skończoną liczbę obszarów normalnych (względem obu osi).
Def. 2.4.3 (cyrkulacja pola wektorowego)Cyrkulacją pola wektorowego F
po łuku zamkniętym zorientowanym Γ nazywamy całkę krzywoliniową zorientowaną
∫Γ
rdF
.
2.5 ZASTOSOWANIA CAŁEK KRZYWOLINIOWYCH ZORIENTOWANYCH
Fakt 2.5.1 (zastosowania w geometrii)Pole obszaru D ⊂ R2 ograniczonego łukiem zamkniętym kawałkami gładkim Γ, dodatnio zorientowanym względem obszaru D, wyraża się wzorami:
∫∫∫ΓΓΓ
−==−= ydxxdyxdyydxD21
.
Fakt 2.5.2 (zastosowania w fizyce)1. Praca w polu wektorowym F
wykonana wzdłuż łuku zorientowanego Γ, od punktu początkowego do końcowego, wy
raża się wzorem:
∫Γ
= rdFW
.
2. Ilość płaskiej (umownej) cieczy przepływającej w jednostce czasu przez łuk zorientowany Γ wyraża się wzorem:
∫Γ
−−= dyyxPdxyxQA ),(),( ,
gdzie ( )),(),,(),( yxQyxPyxv = oznacza prędkość przepływu cieczy w punkcie (x,y) tego łuku.
3. CAŁKI POWIERZCHNIOWE NIEZORIENTOWANE
3.1 PŁATY POWIERZCHNIOWE
Def. 3.1.1 (funkcja wektorowa dwóch zmiennych w przestrzeni)a) Niech D będzie obszarem na płaszczyźnie. Funkcją wektorową dwóch zmiennych w przestrzeni nazywamy odwzorowanie
3: RDr → . Funkcję taką będziemy zapisywać w postaci( )),(),,(),,(),( vuzvuyvuxvur =
, gdzie Dvu ∈),( .
Rys. 3.1.1 Funkcja wektorowa 3: RDr →

b) Mówimy, że funkcja wektorowa 3: RDr → jest różnowartościowa, gdy dla dowolnych punktów (u1,v1), (u2,v2) ∈ D prawdziwa jest implikacja
),(),(),(),( 22112211 vurvurvuvu ≠⇒≠ .c) Mówimy, że funkcja wektorowa 3: RDr → jest ciągła, gdy funkcje x, y, z są ciągłe na D.d) Mówimy, że funkcja wektorowa 3: RDr → jest różniczkowalna w sposób ciągły, gdy funkcje x, y, z mają ciągłe
wszystkie pochodne cząstkowe pierwszego rzędu na obszarze D.
Def. 3.1.2 (płat powierzchniowy)Niech D będzie prostokątem na płaszczyźnie oraz niech funkcja wektorowa 3: RDr → , gdzie
( )),(),,(),,(),( vuzvuyvuxvur = dla Dvu ∈),( , będzie ciągła i różnowartościowa na prostokącie D. Płatem powierzchnio
wym nazywamy zbiór wartości funkcji wektorowej r , tj. zbiór:{ }Dvuvur ∈=Σ ),(:),( .
Zbiór w przestrzeni taki, że każdy jego punkt ma otoczenie domknięte, które jest płatem prostym, nazywamy płatem powierzchniowym.
Uwaga. Funkcję wektorową r lub układ funkcji x, y, z nazywamy parametryzacją płata Σ. Płat prosty można wyobrazić sobie jako powyginany w przestrzeni prostokąt. Przy tym przekształcaniu prostokąta nie można rozrywać ani sklejać.
Rys. 3.1.2 Zbiór Σ nie jest płatem powierzchniowym
Rys. 3.1.3 Zbiór Σ jest płatem powierzchniowym
Def. 3.1.3 (płat powierzchniowy gładki)Płat powierzchniowy { }Dvuvur ∈=Σ ),(:),( , gdzie D jest obszarem domkniętym z brzegiem kawałkami gładkim, a funkcja wektorowa ( )),(),,(),,(),( vuzvuyvuxvur =
jest różnowartościowa i różniczkowalna w sposób ciągły na obszarze D, nazywamy płatem gładkim, gdy na obszarze D spełniony jest warunek
0
≠∂∂×
∂∂
vr
ur
,
gdzie
∂∂
∂∂
∂∂=
∂∂
uz
uy
ux
ur ,,
oraz
∂∂
∂∂
∂∂=
∂∂
vz
vy
vx
vr ,,
.
Płat, który można podzielić na skończoną liczbę płatów gładkich, nazywamy płatem kawałkami gładkim.
Rys. 3.1.4 Płat powierzchniowy gładki Rys. 3.1.5 Płat powierzchniowy kawałkami gładki
Fakt 3.1.4 (równania parametryczne ważniejszych płatów powierzchniowych)1. Płaszczyzna przechodząca przez punkt ),,( 0000 zyxr =
i rozpięta na wektorach ),,( 111 zyxa =, ),,( 222 zyxb =
ma przedstawienie parametryczne:
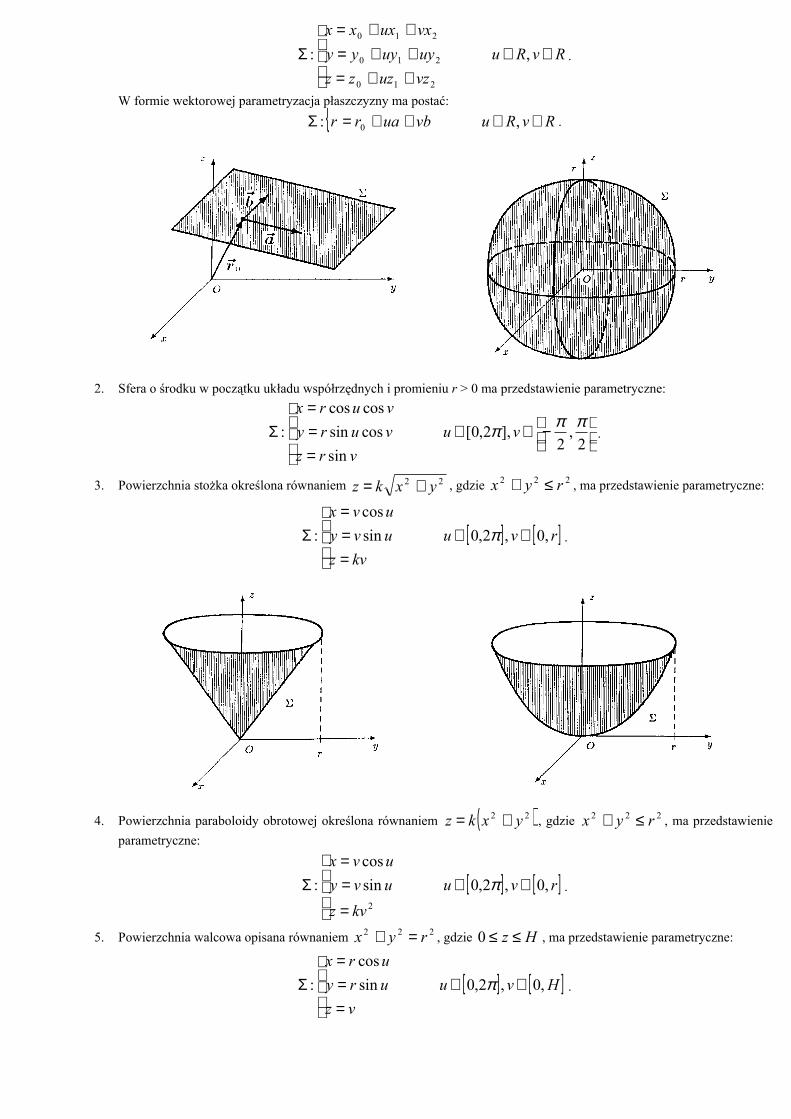
RvRuvzuzzzuyuyyyvxuxxx
∈∈
++=++=++=
Σ ,:
210
210
210
.
W formie wektorowej parametryzacja płaszczyzny ma postać:{ RvRubvaurr ∈∈++=Σ ,: 0
.
2. Sfera o środku w początku układu współrzędnych i promieniu r > 0 ma przedstawienie parametryczne:
−∈∈
===
Σ2
,2
],2,0[sin
cossincoscos
: πππ vuvrz
vuryvurx
.
3. Powierzchnia stożka określona równaniem 22 yxkz += , gdzie 222 ryx ≤+ , ma przedstawienie parametryczne:
[ ] [ ]rvukvz
uvyuvx
,0,2,0sincos
: ∈∈
===
Σ π .
4. Powierzchnia paraboloidy obrotowej określona równaniem ( )22 yxkz += , gdzie 222 ryx ≤+ , ma przedstawienie parametryczne:
[ ] [ ]rvukvz
uvyuvx
,0,2,0sincos
:2
∈∈
===
Σ π .
5. Powierzchnia walcowa opisana równaniem 222 ryx =+ , gdzie Hz ≤≤0 , ma przedstawienie parametryczne:
[ ] [ ]Hvuvz
uryurx
,0,2,0sincos
: ∈∈
===
Σ π .
Uwaga. Równania fragmentów tych płatów powierzchniowych otrzymamy zmniejszając odpowiednio zakresy parametrów u, v.
Fakt 3.1.5 (o postaci płatów powierzchniowych)Płatami powierzchniowymi są wykresy funkcji ciągłych postaci:1. 1),();,( Dyxyxzz ∈= , gdzie D1 jest obszarem na płaszczyźnie xOy,2. 2),();,( Dzyzyxx ∈= , gdzie D2 jest obszarem na płaszczyźnie yOz,3. 3),();,( Dzxzxyy ∈= , gdzie D3 jest obszarem na płaszczyźnie xOz.Jeżeli funkcje te mają ciągłe pochodne cząstkowe pierwszego rzędu na rozważanych obszarach, to te płaty powierzchniowe są gładkie.Uwaga. Równania ważniejszych płatów powierzchniowych, które są wykresami funkcji postaci z = f(x,y) podane są w części „Analiza matematyczna 2” w fakcie 3.2.5.
Tw. 3.1.6 (pole płata powierzchniowego)Niech { }Dvuvur ∈=Σ ),(:),( będzie gładkim płatem powierzchniowym. Wtedy pole tego płata wyraża się wzorem:
∫∫ ∂∂×
∂∂=Σ
D
dvduvr
ur
.
Uwaga. Jeżeli płat gładki Σ jest wykresem funkcji z = z(x,y), gdzie (x,y) ∈ D, to jego pole wyraża się wzorem:
∫∫
∂∂+
∂∂+=Σ
D
dydxyz
xz
22
1 .
Analogicznie wyglądają wzory na pola płatów gładkich będących wykresami funkcji x = x(y,z) oraz y = y(x,z).
3.2 DEFINICJA I WŁASNOŚCI CAŁKI POWIERZCHNIOWEJ NIEZORIENTOWANEJ
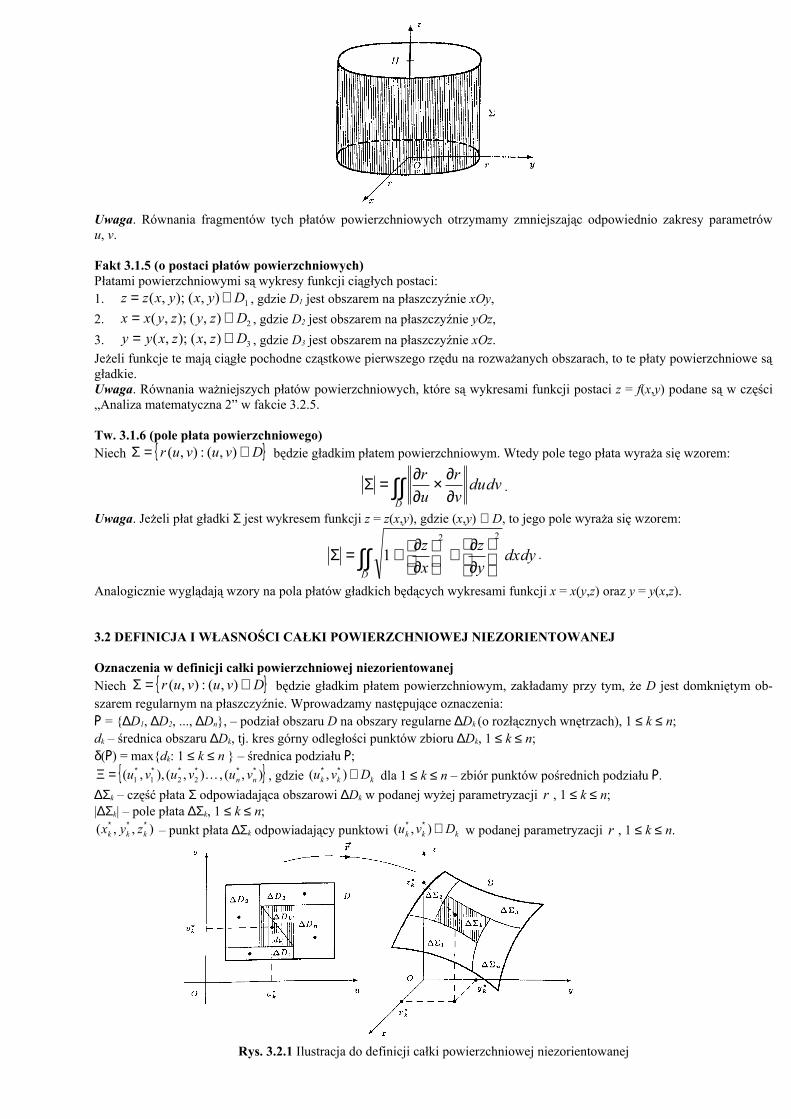
Oznaczenia w definicji całki powierzchniowej niezorientowanejNiech { }Dvuvur ∈=Σ ),(:),( będzie gładkim płatem powierzchniowym, zakładamy przy tym, że D jest domkniętym obszarem regularnym na płaszczyźnie. Wprowadzamy następujące oznaczenia:P = {∆D1, ∆D2, ..., ∆Dn}, – podział obszaru D na obszary regularne ∆Dk (o rozłącznych wnętrzach), 1 ≤ k ≤ n;dk – średnica obszaru ∆Dk, tj. kres górny odległości punktów zbioru ∆Dk, 1 ≤ k ≤ n;δ(P) = max{dk: 1 ≤ k ≤ n } – średnica podziału P;
{ }),(,),(),,( 2211∗∗∗∗∗∗=Ξ nn vuvuvu , gdzie kkk Dvu ∈∗∗ ),( dla 1 ≤ k ≤ n – zbiór punktów pośrednich podziału P.
∆Σk – część płata Σ odpowiadająca obszarowi ∆Dk w podanej wyżej parametryzacji r , 1 ≤ k ≤ n;|∆Σk| – pole płata ∆Σk, 1 ≤ k ≤ n;
),,( ∗∗∗kkk zyx – punkt płata ∆Σk odpowiadający punktowi kkk Dvu ∈∗∗ ),( w podanej parametryzacji r , 1 ≤ k ≤ n.
Rys. 3.2.1 Ilustracja do definicji całki powierzchniowej niezorientowanej

Def. 3.2.1 (całka powierzchniowa niezorientowana)Niech Σ będzie płatem powierzchniowym gładkim oraz niech funkcja Rf →Σ: będzie ograniczona. Całkę powierzchniową niezorientowaną z funkcji f po płacie Σ definiujemy wzorem:
( )∑∫∫=
∗∗∗
→Σ
∆Σ=n
kkkkk
defzyxfdSzyxf
10)(,,lim),,(
Pδ,
o ile granica po prawej stronie znaku równości istnieje oraz nie zależy od sposobu podziału P obszaru D, ani od sposobu wyboru punktów pośrednich Ξ.Uwaga. Wartość całki powierzchniowej niezorientowanej nie zależy od sposobu parametryzacji płata. Całkę powierzchniową
niezorientowaną z funkcji f po płacie Σ oznaczamy krótko symbolem ∫∫Σ
dSf .
Def. 3.2.2 (całka powierzchniowa po płacie kawałkami gładkim)Niech Σ będzie płatem kawałkami gładkim złożonym z płatów gładkich Σ1, Σ2, …, Σm oraz niech f będzie funkcją określoną i ograniczoną na płacie Σ. Całkę powierzchniową niezorientowaną z funkcji f po płacie Σ definiujemy wzorem:;
∫∫∫∫∫∫∫∫ΣΣΣΣ
+++=m
dSfdSfdSfdSfdef
...21
,
o ile całki po prawej stronie znaku równości istnieją.
Tw. 3.2.3 (liniowość całki powierzchniowej niezorientowanej)Jeżeli funkcje f i g są całkowalne na kawałkami gładkim płacie powierzchniowym Σ oraz jeżeli c jest dowolną stałą, to:a) funkcja f + g jest całkowalna na płacie Σ oraz
∫∫ ∫∫∫∫Σ ΣΣ
+=+ dSgdSfdSgf )( ,
b) funkcja cf jest całkowalna na płacie Σ oraz
∫∫∫∫ΣΣ
= dSfcdScf )( .
Def. 3.2.4 (całka powierzchniowa niezorientowana z funkcji wektorowej)Niech Σ będzie kawałkami gładkim płatem powierzchniowym oraz niech funkcje P, Q, R będą całkowalne na Σ. Całkę powierzchniową niezorientowaną po płacie Σ z funkcji wektorowej ),,( RQPF =
określamy wzorem:
= ∫∫∫∫∫∫∫∫
ΣΣΣΣ
dSRdSQdSPdSFdef
,,
.
3.3 ZAMIANA CAŁKI POWIERZCHNIOWEJ NIEZORIENTOWANEJ NA CAŁKĘ PODWÓJNĄ
Tw. 3.3.1 (o zamianie całki powierzchniowej na całkę podwójną)Jeżeli
1. obszar D ⊂ R2 jest regularny,2. płat { }Dvuvur ∈=Σ ),(:),( jest gładki,3. funkcja Rf →Σ: jest ciągła,
to
( ) dvduvr
urvurfdSzyxf
D ∂∂×
∂∂= ∫∫∫∫
Σ
),(),,( .
Uwaga. Jeżeli płat gładki Σ jest wykresem funkcji z = z(x,y), gdzie (x,y) ∈ D oraz funkcja f jest ciągła na Σ, to wzór na zamianę całek przyjmuje postać:
( ) dydxyxyzyx
xzyxzyxfdSzyxf
D
22
),(),(1),(,,),,(
∂∂+
∂∂+= ∫∫∫∫
Σ
.
Analogiczne wzory otrzymujemy w przypadku płatów powierzchniowych opisanych równaniami x = x(y,z) lub y = y(x,z).
3.4 ZASTOSOWANIA CAŁEK POWIERZCHNIOWYCH NIEZORIENTOWANYCH
Fakt 3.4.1 (zastosowania w geometrii)Pole kawałkami gładkiego płata Σ wyraża się wzorem:
∫∫Σ
=Σ dS .
Fakt 3.4.2 (zastosowania w fizyce)1. Masa płata materialnego Σ o gęstości powierzchniowej masy σ wyraża się wzorem:
∫∫Σ
= dSzyxM ),,(σ .
2. Momenty statyczne względem płaszczyzn układu współrzędnych płata materialnego Σ o gęstości powierzchniowej masy σ wyrażają się wzorami:
∫∫Σ
= dSzyxxMS yz ),,(σ ,
∫∫Σ
= dSzyxyMS xz ),,(σ ,
∫∫Σ
= dSzyxzMS xy ),,(σ .
3. Współrzędne środka masy płata Σ o gęstości powierzchniowej masy σ wyrażają się wzorami:
MMS
x yzC = ,
MMS
y xzC = ,
MMS
z xyC = .
4. Momenty bezwładności względem osi oraz względem początku układu współrzędnych płata materialnego Σ o gęstości powierzchniowej masy σ wyrażają się wzorami:
( )∫∫Σ
+= dSzyxzyI x ),,(22 σ ,
( )∫∫Σ
+= dSzyxzxI y ),,(22 σ ,
( )∫∫Σ
+= dSzyxyxI z ),,(22 σ ,
( )∫∫Σ
++= dSzyxzyxI ),,(2220 σ .
5. Natężenie pola elektrycznego w punkcie 0r
pochodzące od ładunku elektrycznego rozłożonego na płacie Σ o gęstości powierzchniowej ładunku σ wyraża się wzorem:
∫∫Σ −
−= dS
rrrrr
E 30
0
0
)()(4
1
σπε ,
gdzie ε0 oznacza stałą dielektryczną próżni.
6. Siła przyciągania grawitacyjnego masy m skupionej w punkcie 0r
przez płat materialny Σ o gęstości powierzchniowej masy σ wyraża się wzorem:
dSrr
rrrGmF ∫∫
Σ −
−= 3
0
0 )()(
σ,
gdzie G oznacza stałą grawitacji.
Fakt 3.4.3 (środki masy płatów symetrycznych)1. Jeżeli płat powierzchniowy ma środek symetrii i gęstość powierzchniowa masy jest funkcją symetryczną względem tego
środka (np. jest stała), to środek masy płata pokrywa się z jego środkiem symetrii.2. Jeżeli płat powierzchniowy ma oś lub płaszczyznę symetrii i gęstość powierzchniowa masy jest funkcją symetryczną
względem tej osi lub płaszczyzny (np. jest stała), to środek masy tego płata leży na jego osi lub płaszczyźnie symetrii.
4. CAŁKI POWIERZCHNIOWE ZORIENTOWANE I ELEMENTY ANALIZY WEKTOROWEJ
4.1 DEFINICJA I WŁASNOŚCI CAŁKI POWIERZCHNIOWEJ ZORIENTOWANEJ
Def. 4.1.1 (płat powierzchniowy zorientowany)Płat powierzchniowy dwustronny, na którym wyróżniono jedną ze stron, nazywamy płatem powierzchniowym zorientowanym. Wyróżnioną stronę płata zorientowanego nazywamy stroną dodatnią. Płat zorientowany oznaczamy tym samym symbolem co płat. Płat powierzchniowy zorientowany przeciwnie do płata zorientowanego Σ oznaczamy przez – Σ.
Dla płatów zamkniętych ograniczających pewien obszar w przestrzeni za stronę dodatnią płata przyjmujemy z reguły jego stronę zewnętrzną. Dla płatów będących wykresami funkcji postaci z = f(x,y), x = g(y,z), y = h(x,z) za stronę dodatnią przyjmujemy zwykle górną część takiego płata.
Rys. 4.1.1 Płat powierzchniowy jednostronny Rys. 4.1.2 Płat powierzchniowy dwustronny; wykres funkcji z = f(x,y)

Fakt 4.1.2 (postać wersora normalnego płata)Niech płat gładki zorientowany Σ ma przedstawienie parametryczne { }Dvuvur ∈=Σ ),(:),( . Wtedy wersor normalny n do płata Σ wystawiony w punkcie (x0, y0, z0) tego płata, odpowiadającym punktowi (u0, v0) obszaru D w powyższej parametryzacji wyraża się wzorem:
vr
ur
vr
ur
n
∂∂×
∂∂
∂∂×
∂∂
±=
,
gdzie wektory ur
∂∂
oraz vr
∂∂
są obliczone w punkcie (u0, v0). Znak stojący przed wersorem n ustala się na podstawie orientacji
płata Σ. Przyjmujemy, że wersor normalny jest skierowany od strony ujemnej do dodatniej płata zorientowanego.
Jeżeli płat gładki Σ jest wykresem funkcji z = z(x,y), gdzie (x,y) ∈ D, to wersor normalny n do płata Σ wystawiony w punkcie (x0, y0, z0) tego płata, gdzie z0 = z(x0, y0), wyraża się wzorem:
++++
−
++
−=222222 1
1,1
,1 qpqp
q
qp
pn ,
gdzie ),( 00 yxxzp
∂∂= , ),( 00 yx
yzq
∂∂= . Wersor normalny n można przedstawić w postaci )cos,cos,(cos γβα=n , gdzie
α, β, γ oznaczają kąty między tym wersorem, a dodatnimi częściami osi Ox, Oy, Oz.
Rys. 4.1.3 Wersor normalny do płata zorientowanego Σ Rys. 4.1.4 Kosinusy kierunkowe wektora normalnego n
Def. 4.1.3 (całka powierzchniowa zorientowana)Niech ),,( RQPF =
będzie polem wektorowym na płacie gładkim zorientowanym Σ. Całkę powierzchniową zorientowaną z
pola wektorowego F
po płacie Σ definiujemy wzorem:
( )( )∫∫
∫∫∫∫
Σ
ΣΣ
++=
==++
dSzyxRzyxQzyxP
dSzyxnzyxFdydxzyxRdxdzzyxQdzdyzyxPdef
γβα cos),,(cos),,(cos),,(
),,(),,(),,(),,(),,(
gdzie )cos,cos,(cos γβα=n oznacza wersor normalny do płata zorientowanego Σ wystawiony w punkcie (x,y,z) tego płata.
Uwaga. W zapisie wektorowym powyższa definicja przyjmuje postać:
( )∫∫∫∫ΣΣ
= dSrnrFSdrFdef
)()()(
,
gdzie ),,( dxdydzdxdydzSddef
=
. Całkę powierzchniową zorientowaną z pola wektorowego F
po płacie Σ oznaczamy też
krótko ∫∫Σ
++ dydxRdxdzQdzdyP , a w notacji wektorowej ∫∫Σ
SdF
.

Rys. 4.1.5 Ilustracja do definicji całki powierzchniowej zorientowanej z pola wektorowego F
po płacie
zorientowanym Σ
Def. 4.1.4 (całka powierzchniowa po płacie kawałkami gładkim)Niech Σ będzie kawałkami gładkim płatem zorientowanym, utworzonym z płatów gładkich Σ1, Σ2, …, Σm, o orientacjach pokrywających się z orientacją płata Σ. Ponadto niech F
będzie polem wektorowym określonym na płacie Σ. Całkę powierzch
niową zorientowaną z pola wektorowego F
po płacie Σ definiujemy wzorem:
∫∫∫∫∫∫∫∫ΣΣΣΣ
+++=m
SdFSdFSdFSdFdef
...21
,
o ile całki po prawej stronie znaku równości istnieją. Jeżeli Σ jest płatem zorientowanym zamkniętym ograniczającym pewien
obszar w przestrzeni, to wtedy piszemy ∫∫Σ
w miejsce ∫∫Σ
.
Tw. 4.1.5 (liniowość całki powierzchniowej zorientowanej)Jeżeli istnieją całki powierzchniowe z pól wektorowych F
i G
po kawałkami gładkim płacie powierzchniowym zorientowa
nym Σ oraz jeżeli c jest dowolną stałą, toa) istnieje całka z pola wektorowego GF
+ po płacie Σ oraz
( ) ∫∫∫∫∫∫ΣΣΣ
+=+ SdGSdFSdGF
,
b) istnieje całka z pola wektorowego Fc
po płacie Σ oraz
( ) ∫∫∫∫ΣΣ
= SdFcSdFc
,
c) istnieje całka z pola wektorowego F
po płacie o orientacji przeciwnej – Σ oraz
∫∫∫∫ΣΣ−
−= SdFSdF
.
4.2 ZAMIANA CAŁKI POWIERZCHNIOWEJ ZORIENTOWANEJ NA CAŁKĘ PODWÓJNĄ
Tw. 4.2.1 (o zamianie całki powierzchniowej na całkę podwójną)Jeżeli
1. ( ){ }Dvuvuzvuyvux ∈=Σ ),(:),(),,(),,( jest gładkim płatem zorientowanym, gdzie D jest obszarem regularnym na płaszczyźnie,
2. pole wektorowe ),,( RQPF =
jest ciągłe na płacie Σ,to
( ) ( )
( ) dvdu
vy
uy
vx
ux
vuzvuyvuxR
vx
ux
vz
uz
vuzvuyvuxQ
vz
uz
vy
uy
vuzvuyvuxP
dxdyzyxRdzdxzyxQdydzzyxP
D
∂∂
∂∂
∂∂
∂∂
+
+
∂∂
∂∂
∂∂
∂∂
+
∂∂
∂∂
∂∂
∂∂
±=
=++
∫∫
∫∫Σ
),(),,(),,(
),(),,(),,(),(),,(),,(
),,(),,(),,(
.
Znak stojący przed całką podwójną ustala się na podstawie orientacji płata Σ.
Uwaga. W zapisie wektorowym wzór ten przyjmuje postać
( ) ( )∫∫∫∫
∂∂×
∂∂±=
Σ D
dvduvr
urvurFSdrF
),( .

Jeżeli gładki płat zorientowany Σ jest wykresem funkcji z = z(x,y), gdzie (x,y) ∈ D, oraz pole wektorowe ),,( RQPF =
jest ciągłe na Σ, to
( ) ( ) ( )∫∫
∫∫
−
∂∂+
∂∂−=
=++Σ
D
dxdyyxzyxRyzyxzyxQ
xzyxzyxP
dxdyzyxRdzdxzyxQdydzzyxP
),(,,),(,,),(,,
),,(),,(),,(
.
Podobne równości mają miejsce, gdy płat Σ jest wykresem funkcji x = x(y,z) lub y = y(x,z).4.3 ELEMENTY ANALIZY WEKTOROWEJ
Def. 4.3.1 (operator Hamiltona – nabla)Operator Hamiltona (nabla) określony jest wzorem:
∂∂
∂∂
∂∂=
∂∂+
∂∂+
∂∂=∇
zyxzk
yj
xi
def,,
.
Def. 4.3.2 (gradient funkcji)Niech f będzie funkcją różniczkowalną na obszarze V ⊂ R3. Gradient funkcji f jest określony wzorem:
∂∂
∂∂
∂∂=∇=
zf
yf
xfff
def,,grad .
Fakt 4.3.3 (własności gradientu)Niech funkcje f i g będą różniczkowalne na obszarze V ⊂ R3 oraz niech a, b ∈ R. Wtedya) gbfabgaf gradgradgrad +=+ )( ,b) gffgfg gradgradgrad +=)( ,
c) 2ggffg
gf gradgradgrad −
=
,
d) ffhfh gradgrad )()( /= , gdzie h jest funkcją różniczkowalną na pewnym przedziale,
e) ofconstf ≡⇔≡ grad ,
f) ( )fvvf grad
=
∂∂
, gdzie v jest wersorem.
Def. 4.3.4 (pole wektorowe potencjalne)Pole wektorowe F
nazywamy polem potencjalnym na obszarze V ⊂ R3, jeżeli istnieje funkcja RVU →: taka, że
UF grad=
.
Funkcję U nazywamy potencjałem pola wektorowego F
.
Def. 4.3.5 (rotacja pola wektorowego)Niech ),,( RQPF =
będzie różniczkowalnym polem wektorowym określonym na obszarze V ⊂ R3. Rotację pola wektoro
wego F
określamy wzorem:
RQPzyx
kji
FFdef
∂∂
∂∂
∂∂=×∇=
rot .
Fakt 4.3.6 (własności rotacji)Niech f będzie funkcją różniczkowalną na obszarze V ⊂ R3 oraz niech pola wektorowe F
i G
będą różniczkowalne na tym
obszarze. Wtedya) ( ) GbFaGbFa
rotrotrot +=+ , gdzie a, b ∈ R,
b) ( ) ( ) FfFfFf
rotgradrot +×= ,
c) ( ) oU =gradrot , gdzie U jest funkcją dwukrotnie różniczkowalną w sposób ciągły na V.
Def. 4.3.7 (dywergencja pola wektorowego)

Niech ),,( RQPF =
będzie polem wektorowym różniczkowalnym w sposób ciągły na obszarze V ⊂ R3. Dywergencję pola wektorowego F
określamy wzorem:
zR
yQ
xPFF
def
∂∂+
∂∂+
∂∂=∇=
div .
Fakt 4.3.8 (własności dywergencji)Niech f będzie funkcją różniczkowalną w sposób ciągły na obszarze V ⊂ R3 oraz niech pola wektorowe F
i G
będą
różniczkowalne w sposób ciągły na tym obszarze. Wtedya) ( ) GbFaGbFa
divdivdiv +=+ , gdzie a, b ∈ R,
b) ( ) ( ) FfFfFf
divgraddiv += ,
c) ( ) GFFGGF
rotrotdiv −=× ,
d) ( ) 0=F
rotdiv , gdzie pole wektorowe F
ma współrzędne dwukrotnie różniczkowalne w sposób ciągły na V.
4.4 TWIERDZENIE GAUSSA I STOKESA
Tw. 4.4.1 (wzór Gaussa)Jeżeli
1. Σ jest zorientowanym kawałkami gładkim płatem zamkniętym, który jest brzegiem obszaru domkniętego V ⊂ R3,2. pole wektorowe ),,( RQPF =
jest różniczkowalne w sposób ciągły na V,
to
∫∫∫∫∫ =Σ V
dVFSdF
div .
Po rozwinięciu powyższa równość (wzór Gaussa) przyjmuje postać:
dVzR
yQ
xPdydxRdxdzQdzdyP
V∫∫∫∫∫
∂∂+
∂∂+
∂∂=++
Σ
.
Rys. 4.4.1 Ilustracja do wzoru Gaussa
Tw. 4.4.2 (wzór Stokesa)Jeżeli
1. Σ jest płatem kawałkami gładkim zorientowanym, którego brzeg Γ jest łukiem kawałkami gładkim zorientowanym zgodnie z orientacją płata Σ,
2. pole wektorowe ),,( RQPF =
jest różniczkowalne w sposób ciągły na płacie Σ (łącznie z brzegiem Γ),to
( )∫∫∫ΣΓ
= SdFrdF
rot .
Po rozwinięciu powyższa równość (wzór Stokesa) przyjmuje postać:
∫∫∫ΣΓ
∂∂−
∂∂+
∂∂−
∂∂+
∂∂−
∂∂=++ dydx
yP
xQdxdz
xR
zPdzdy
zQ
yRRdzQdyPdx .
Rys. 4.4.2 Ilustracja do wzoru Stokesa
Uwaga. Wzór Greena podany w rozdziale 2.4 jest szczególnym przypadkiem wzoru Stokesa. Rzeczywiście, przyjmując, że Σ ⊂ xOy jest płatem zorientowanym o brzegu Γ oraz, że pole wektorowe F
określone na tym płacie ma postać )0,,( QPF =
,
przy czym funkcje P i Q zależą tylko od zmiennych x, y, otrzymamy
∫∫∫ΣΓ
∂∂−
∂∂=+ dydx
yP
xQQdyPdx .
4.5 ZASTOSOWANIA CAŁEK POWIERZCHNIOWYCH ZORIENTOWANYCH
Fakt 4.5.1 (zastosowania w geometrii)Objętość obszaru V ograniczonego płatem zamkniętym Σ zorientowanym na zewnątrz wyraża się wzorami:
∫∫∫∫∫∫∫∫ΣΣΣΣ
++==== zdxdyydzdxxdydzydzdxxdydzzdxdyV31
.
Fakt 4.5.2 (zastosowania w fizyce)1. Ilość cieczy przepływającej w jednostce czasu przez płat zorientowany Σ (ze strony ujemnej na dodatnią) wyraża się
wzorem:
∫∫Σ
= SdzyxvA
),,( ,
gdzie ),,( zyxv oznacza prędkość cieczy w punkcie (x,y,z) tego płata.
2. Parcie cieczy o ciężarze właściwym C na dodatnią stronę płata zorientowanego Σ, który jest zanurzony w tej cieczy, wyraża się wzorem:
= ∫∫∫∫∫∫
ΣΣΣ
zdxdyzdzdxzdydzCP ,,
.