




Języki
Strony
Prawny


P R A C E N A U K O W E P O L I T E C H N I K I W A R S Z A W S K I E J z. 98 Transport 2013
W�odzimierz Choroma�ski, Grzegorz Dobrzy�ski, Krzysztof Fiok
Politechnika Warszawska, Wydzia� Transportu Zak�ad Teorii Konstrukcji Urz�dze� Transportowych
WÓZKI INWALIDZKIE - BADANIA SYMULACYJNE POD��ANIA ZA ZADANYM TOREM JAZDY
R�kopis dostarczono, maj 2013
Streszczenie: W artykule przedstawiono wyniki bada� symulacyjnych pod�ania za zadanym torem jazdy przez wózki inwalidzkie. Obiektami bada� by�y modele wózka elektrycznego oraz wózka nap�dzanego r�cznie. Celem tych symulacji by�a analiza wp�ywu rónych modeli nap�du na zdolno�� pod�ania za zadanym torem jazdy. S�owa kluczowe: wózek inwalidzki, badania symulacyjne, MBS
1. WST�P
Wysoki stopie� zrónicowania budowy wózków inwalidzkich jest odpowiedzi� na zapotrzebowanie uytkowników odno�nie funkcjonalno�ci tego �rodka transportu, ale przede wszystkim wynika on z wymaga� dotycz�cych przystosowania do rónych typów schorze�. Wózek inwalidzki dla konkretnej osoby dobiera si� tak, aby podczas jego uytkowania, moliwie w jak najszerszym zakresie wykorzystywane by�y sprawne partie mi��ni. Pozwala to poprawi� komfort psychiczny osoby niepe�nosprawnej poprzez umoliwienie jej wzgl�dnie samodzielnej egzystencji, ale równie na utrzymanie kondycji fizycznej. Dlatego wózków o nap�dzie r�cznym uywaj� najcz��ciej osoby z poraeniem dwuko�czynowym nóg (paraplegia) lub innymi schorzeniami utrudniaj�cymi chód, lecz z w�a�ciw� sprawno�ci� górnych ko�czyn. Bardziej rozleg�e upo�ledzenia ruchowe wymagaj� wspomagania przemieszczania tego typu wózka przez osob� sprawn�, co ogranicza samodzielno��. W takich przypadkach niezb�dne jest zastosowanie wózka z autonomicznym nap�dem np. elektrycznym.
W niniejszej pracy przedstawiono wyniki bada� symulacyjnych pod�ania za zadanym torem jazdy przez wózki inwalidzkie. Obiektami bada� by�y: model wózka elektrycznego oraz wózka nap�dzanego r�cznie. Celem tych symulacji by�a analiza wp�ywu rónych modeli nap�du na zdolno�� pod�ania za zadanym torem jazdy. Do symulacji wybrano wózki inwalidzkie (rys. 1.) opracowane w ramach projektu Eco-Mobilno�� realizowanego na Wydziale Transportu Politechniki Warszawskiej.

68 W�odzimierz Choroma�ski, Grzegorz Dobrzy�ski, Krzysztof Fiok
2. OBIEKT BADA� SYMULACYJNYCH Obiektem bada� s� konstrukcje prototypowe i wci� rozwijane: wózek elektryczny z
opcja jazdy po schodach oraz wózek nap�dzany r�cznie poprzez d wignie (rys.1). Niniejsza praca jest cz��ci� dzia�a� zmierzaj�cych do opracowania uniwersalnego �rodowiska symulacyjnego ruchu wózków inwalidzkich o rónej konstrukcji. �rodowisko to ma pe�ni� rol� narz�dzia wirtualnego prototypowania i eksperymentu. W tych pracach problemem badawczym jest ocena wp�ywu parametrów regulacji i cech dynamicznych modelu symulacyjnego na zdolno�� pod�ania za zadan� trajektori� ruchu.
Rys. 1. Konstrukcja prototypowa wózka elektrycznego i wózka nap�dzanego poprzez d wignie
Prace naukowe dotycz�ce bada� symulacyjnych pod�ania za zadanym torem jazdy
dotycz� przede wszystkim pojazdów samochodowych. Tematyk� t� w zakresie wózków inwalidzkich zajmuj� tylko kilka o�rodków naukowych na �wiecie. Podstawow� rónic� w stosowanych tam modelach jest sposób zadawania kierunku jazdy. W przypadku wózków inwalidzkich najcz��ciej stosuje si� wykonywanie manewru skr�cania poprzez rónicowanie pr�dko�ci obrotowych kó� danej osi. Na drugiej osi znajduj� si� ko�a samo skr�tne.
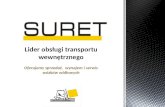
Do budowy modelu symulacyjnego wykorzystano �rodowisko Matlab – Simmechanics. Struktur� tego modelu przedstawiono na Rys. 2. Wskazano na nim podzia� na g�ówne modu�y modelu. Modu� stanowi po��czenie w grup� elementów wspólnie realizuj�cych okre�lon� funkcj�.
Kady ze wskazanych modu�ów tego modelu jest zdefiniowany zgodnie z za�oeniami modelu nominalnego i odpowiednio reprezentuje:
� 1. – modu� zawieraj�cy parametry masowe ramy z siedziskiem oraz zwi�zane z ni� nieruchomo nap�dy, przek�adnie, d wignie itp.

Wózki inwalidzkie - badania symulacyjne pod�ania za zadanym torem jazdy 69
� 2.(TP, TL, PP, PL) – modu� reprezentuj�cy ko�a: TP i TL to ko�a tylne prawe i lewe, PP i PL to ko�a przednie prawe i lewe wraz ze zwrotnicami. Ko�a tylne tworz� z ram� par� kinematyczn� obrotow� bez tarcia. Ko�a przednie po��czone s� ze zwrotnic�, jako para kinematyczna obrotowa bez tarcia. Zwrotnica po��czona jest z ram� jako para kinematyczna obrotowa z tarciem. O� obrotu zwrotnicy jest pionowa.
� 3. – modu� reprezentuj�cy decyzje osoby kieruj�cej wózkiem. Zadaniem tego modu�u jest odzwierciedlenie reakcji cz�owieka, który stara si� pod�a� za zadanym torem jazdy utrzymuj�c przy tym okre�lon� pr�dko��.
� 4. – modu� reprezentuj�cy ród�o momentu nap�dowego. W przypadku wózka elektrycznego reprezentuje elektroniczny system steruj�cy wózkiem inwalidzkim. Dla potrzeb tych symulacji ograniczono jego budow� do uk�adów regulacji pr�dko�ci i kierunku jazdy poprzez zadawanie momentu nap�dowego. W przypadku wózka nap�dzanego r�cznie modu� ten reprezentuje ko�czyny górne jako ród�o momentu nap�dowego którego warto�� jest zadawana w sposób okresowy.
Rys. 2. Schemat blokowy przedstawiaj�cy struktur� modelu symulacyjnego przygotowany w Simmechanics
2.1. STRUKTURA MODU�U NR 1 – RAMA WÓZKA I CZ�OWIEK Przedmiotem symulacji by�a realizacja zadania jazdy po powierzchni p�askiej nad�aj�c
za zadanym kierunkiem jazdy. Przy tak postawionym zadaniu model nominalny modu�u nr 1 zosta� uproszczony do bry� sztywnych o strukturze sk�adaj�cej si� z:
� bry�y ramy z siedziskiem oraz zwi�zanych z ni� nieruchomo nap�dów, przek�adni, d wigni itp.
� bry�y reprezentuj�cej cz�owieka, sztywno po��czona z bry�� ramy, � bry� reprezentuj�cych ko�a tylne prawe i lewe. Ko�a tylne tworz� z ram� par�
kinematyczn� obrotow� bez tarcia.
1.�Rama�wózka�orazsztywno�po��czony�model�cz�owieka
4.Modu��zadawania�
momentu�nap.
3.Model�decyzji�
cz�owieka
2TL. Ko�o�tylne�lewe
2TP.�Ko�o�tylne�prawe
2PP.�Ko�o�przednie�prawe
2PL.�Ko�o�przednie�lewe
Po�oenie�X,�Y;�pr�dko��
Zadany�kierunek
Pr�dko���zadana
Moment�nap�dowy
Moment�nap�dowy

70 W�odzimierz Choroma�ski, Grzegorz Dobrzy�ski, Krzysztof Fiok �
� oraz kó� przednich (prawe i lewe) wraz ze zwrotnicami. Ko�a przednie po��czone s� ze zwrotnic� jako para kinematyczna obrotowa bez tarcia. Zwrotnica po��czona jest z ram� jako para kinematyczna obrotowa z tarciem. O� obrotu zwrotnicy jest pionowa.
Model ten przedstawiono na Rys. 3, wskazuj�c przyj�te uk�ady wspó�rz�dnych. Pocz�tek uk�adu wspó�rz�dnych zwi�zany z bry�� ramy wózka jest usytuowany w �rodku osi kó� tylnych.
Rys. 3. Model nominalny przygotowany do symulacji pod�ania za zadanym torem jazdy
Modeluj�c ram� opisano jej parametry masowe od��czaj�c od ca�o�ci parametry masowe elementów obracaj�cych si� kó�. Warto�ci zestawiono w 0.
Tab. 1 Parametry definiuj�ce model wózka inwalidzkiego
Nazwa parametru Oznaczenie Parametry modelu wózka elektrycznego
Parametry modelu wózka r�cznego Jednostka
Masa mzr.r 60,5 23 kg
Po�oenie �rodka ci�ko�ci ramy w uk�adzie
OX’Y’Z’
x’�c 303 77 mm
z’ �c 64,3 20,5 mm
y’ �c 0 0 mm
Momenty bezw�adno�ci w uk�adzie OX’Y’Z’
IXX 3,4 8,2 kgm2
Iyy 7 3,6 kgm2
Izz 7,8 8,3 kgm2
Rozstaw osi 514 620 mm
Rozstaw kó� tylnych 640 600 mm
Rozstaw kó� przednich 600 560 mm
X
Y
Z
O X’
Y’
Z’
O
�rodek ci��ko�ci manekina
�rodek ci��ko�ci modelu wózka

Wózki inwalidzkie - badania symulacyjne pod�ania za zadanym torem jazdy 71
Buduj�c model symulacyjny cia�a cz�owieka uproszczono go do bry�y sztywnej. Podobne uproszczenie zastosowano w pracy 17. Dodatkowo kierowano si� wytycznymi zawartymi w normie PN-ISO 7176-11 Wózki inwalidzkie: Manekiny do bada� 16 oraz Atlas antropometryczny doros�ej ludno�ci Polski dla potrzeb projektowania 2. W 0 zestawiono warto�ci nominalne wielko�ci definiuj�cych model manekina.
Tab. 2 Parametry masowe modelu manekina
Nazwa parametru Oznaczenie Parametry masowe
manekinów o masie75 kg:
Jednostka
Po�oenie �rodka ci�ko�ci manekina w
uk�adzie OX'Y'Z'
x'�c 217 mm
z' �c 553 mm
y' �c 0 mm
Momenty bezw�adno�ci w uk�adzie OXmYmZm (�rodek ci�ko�ci
manekina)
IXX 7,918 kgm2
IYY 11,054 kgm2
IZZ 4,916 kgm2
IXY= IYZ 0 kgm2
IXZ 3,8 kgm2
2.2. MODELE KÓ� W modelu symulacyjnym zdefiniowano dwie pary kó� róni�cych si� od siebie:
przednie i tylne. Wykorzystano program MF-Tyre opracowany przez uniwersytet TU Delft 19 i organizacj� TNO 18. MF Delft Tyre dostarcza pó�-empiryczny model opony, do stosowania w rónych �rodowiskach symulacji, m.in. w �rodowisku Matlab – Simulink – SimMechanics. W opisie przyczepno�ci zastosowano wzory magicznej formu�y Pacejki (Pacejka Formula Magic). Odkszta�cenia opony opisano tzw. modelem szczotkowym 20. Model przeznaczony jest do oblicze� si� dzia�aj�cych na opon� w stanie statycznym lub w stanie wolnozmiennych oddzia�ywa� dynamicznych, których cz�stotliwo�ci nie przekraczaj� 8Hz. Model przeznaczony jest do bada� sterowno�ci pojazdu w zakr�tach wykonywanych przy badaniach symulacyjnych preprototypowania wirtualnego na nawierzchniach nieodkszta�conych (równych). Z tego wzgl�du model spe�nia oczekiwania projektu wózka inwalidzkiego. W tej pracy wykorzystano model w wersji 6.1.2 z definicj� opcji kontaktu: smooth road contact, circular cross section (motorcycle tyres).
Eksperymentalne wyznaczano parametry sztywno�ci promieniowej i t�umienia modelu opon. Ten etap prac zosta� zrealizowany w ramach Projektu Eco-Mobilno�� i szerzej zaprezentowano go w 8. Badane opony napompowano do ci�nienia nominalnego okre�lonego przez producenta. Wynosi ono 35 psi (241318 Pa).

72 W�odzimierz Choroma�ski, Grzegorz Dobrzy�ski, Krzysztof Fiok �
Tab. 3 Warto�ci wyznaczonych parametrów z warto�ciami
Wielko�� Warto�ci parametrów opon wózka Wektor
Sztywno�� promieniowa [N/m]
Opona przednia: 32'880 Opona tylna: 74'600
Sta�a t�umienia [kg/s]
Opona przednia: 446,0 Opona tylna: 372,6
�rodki ci�ko�ci kó� le� w ich �rodkach geometrycznych i wzgl�dem uk�adu zwi�zanego z t� lokalizacj� zdefiniowano momenty bezw�adno�ci. Parametry definiuj�ce model kó� tylnych i przednich przedstawiono w 0. Parametry kó� przednich by�y identyczne dla obu konstrukcji. Parametry niewymienione w tym miejscu zosta�y zaczerpni�te z otrzymanych od TNO Delf-Tyre definicji opon stosowanych w motocyklach.
Tab. 4 Parametry definiuj�ce model kó� tylnych i przednich
Nazwa parametru Oznaczenie Ko�o tylne -
wózek elektryczny
Ko�o tylne - wózek
d wigniowy
Ko�a przednie Jednostka
Masa mkT 6,7 1,6 1 kg
Momenty bezw�adno�ci
IXX = IZZ 0,048 0,058 0,002 kgm2
Iyy 0,09 0,116 0,005 kgm2
Promie� ko�a r 155 330,2 90 mm
Promie� opony r 30 14 20 mm
2.3. MODU� REPREZENTUJ�CY DECYZJE OSOBY KIERUJ�CEJ WÓZKIEM
Zadaniem modu�u reprezentuj�cego decyzje osoby kieruj�cej wózkiem jest odzwierciedlenie reakcji cz�owieka, który stara si� pod�a� za zadanym torem jazdy utrzymuj�c przy tym okre�lon� pr�dko��. Do opisu zachowania cz�owieka na wózku zastosowano tzw. antycypacyjny blok kieruj�cy 1, 4. Zastosowany regulator PID opisuje rekcj� osoby kieruj�cej w procesie sterowania k�tem wychylenia joysticka lub decyzje o zrónicowaniu si�y r�k nap�dzaj�cej d wignie wózka. Regulator odzwierciedla w�asno�ci psychomotoryczne kieruj�cego. Cz�on „nasycenie” opisuje maksymaln� warto�� wychylenia d wigni joysticka, któr� moe realizowa� osoba kieruj�ca. Na wyj�ciu uk�adu otrzymuje si� sygna� steruj�cy rónic� momentów nap�dzaj�cych ko�a, o warto�ciach nad�aj�cych za warto�ciami zadanymi, przy uwzgl�dnieniu typowych reakcji kierowcy i ogranicze� technicznych dzia�ania uk�adu zadawania.

Par
nominPr�
i stopinwali
Modu�spe�niauk�adóRys. 5
Rys. 5
Wózk
Rys. 4
rametry zastnalne przyj��dko�� porupniowo naraidzki moe s
2.4. MO
� reprezentua zadanie ów regulacj5.
. Schemat m
Uchyb�[mm]
ki inwalidzkie
4. Schemat m
tosowanego�to: P=1; I=0uszania si� asta�a do si� porusza�
ODU� ZA
uj�cy obiekelektroniczji pr�dko�ci
modu�u repre
Skalowsygna
e - badania sy
modu�u repre
o regulatora0.1; D=1; modelu jes1.2 m/s Wa� to v=3.33
ADAWAN
kt zadawanznego systei i kierunku
ezentuj�cego
wanie�a�u
mulacyjne po
ezentuj�cego
a analizowan
st zadawanaarto�� makm/s.
NIA MOM
nia momentemu sterowu jazdy 13
elektroniczn
Regulator�PID
d�ania za za
o decyzje oso
no w dalsze
a poprzez zksymalna p
MENTU N
tu nap�dowwania. Jego
14. Schem
ny system ste
Na
Zaplanpr�d
danym torem
oby kieruj�ce
ej cz��ci pra
zdefiniowanpr�dko�ci 1
NAP�DO
wego w wózdzia�anie
mat tego mo
erowania wó
asycenie
nowana�dko��
jazdy
ej wózkiem
acy. Jako w
n� charakter5, z jak�
OWEGO
zku elektryogranicza
odu�u przed
ózkiem inwal
Zadana�pr�dko��
Zadany�kierunek
73
warto�ci
rystyk� wózek
ycznym si� do
dstawia
lidzkim

74 W�odzimierz Choroma�ski, Grzegorz Dobrzy�ski, Krzysztof Fiok �
Modu� ten dzia�a w oparciu o sprz�enie pr�dko�ci obrotowej kó�. Uk�ad ten posiada struktur� z regulatorem pr�dko�ci �redniej 14.
Parametry zastosowanych regulatorów analizowano w dalszej cz��ci pracy. Jako warto�ci nominalne przyj�to:
� regulator pr�dko�ci: P=1; D=-0.3 , � regulator kierunku: P=1; I=0.02; D=3.
3. BADANIA SYMULACYJNE
Badania symulacyjne prowadzone by�y w �rodowisku Matlab-Simmechanics. Do oblicze� wykorzystano solver "ode15s stiff/NDF". Przeprowadzone badania pozwoli�y przygotowa� charakterystyk� odpowiedzi ca�ego modelu na wymuszenie, jakim jest zadany tor jazdy. Trajektoria po jakiej porusza si� wózek jest zalena od parametrów masowych modelu, parametrów kontaktu oraz od elementów uk�adu sterowania. Istotne s� te w�a�ciwo�ci psychomotoryczne osoby kieruj�cej wózkiem i zadana pr�dko��. Dopiero po��czenie ze sob� cech tych elementów pozwala analizowa� zachowanie si� ca�ego modelu. Szczegó�owe opisy dzia�ania tych elementów modelu zawarto w pracy 10.
Na Rys. 6 przedstawiono charakterystyk� dzia�ania regulatora PID reprezentuj�cego w�asno�ci cz�owieka dla parametrów nominalnych.
Rys. 6. Dzia�anie regulatora PID - cz�owiek: linia czerwona - uchyb, linia zielona - zarejestrowana warto�� na wyj�ciu regulatora
Do istotnych elementów bada� w�asno�ci uk�adów dynamicznych zaliczamy badanie
zaleno�ci odpowiedzi modelu uk�adu od zmian jego parametrów. Wyniki analiz przedstawione dotychczas zosta�y przygotowane dla parametrów nominalnych. W dalszej cz��ci pracy podj�to prób� oceny wraliwo�ci parametrycznej wzgl�dem w�asno�ci modelu cz�owieka. Przyjmuj�c róne warto�ci parametrów modelu symulowano sytuacj�, w której wózkiem steruj� osoby o rónych predyspozycjach psychomotorycznych.
Parametry nominalne regulatora PID stanowi�cego model cz�owieka przyj�to na podstawie 1 4 13. Literatura dotycz�ca modeli osób kieruj�cych wózkami inwalidzkimi nie
Czas�[s]

Wózki inwalidzkie - badania symulacyjne pod�ania za zadanym torem jazdy 75
jest znana autorowi, przyj�to wi�c parametry opisuj�ce kierowców pojazdów. Warto�ci nominalne oraz warto�ci parametrów regulatora PID dla kolejnych serii symulacji zestawiano w 0.
Tab. 5 Parametry regulatora PID modelu cz�owieka
Seria P I D n - nominalne 1 0.1 1
a 1 0.4 1 b 1 1 1 c 1 1.5 1 d 1 1.5 0.5 e 1 1.5 0.3
W wyniku przeprowadzonych symulacji zaobserwowano wp�yw parametrów modelu
elementu cz�owiek na zachowanie si� modelu symulacyjnego. W celu zobrazowania rónic w dzia�aniu tego regulatora przygotowano wykres (Rys. 7) na którym pokazano uchyb i regulacj� dla symulacji z parametrami nominalnymi oraz kolejne serie (a-e) ze zmienionymi warto�ciami parametrów.
Rys. 7. Dzia�anie regulatora PID modelu cz�owieka przy rónych jego nastawach
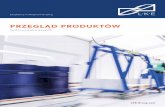
Opracowana charakterystyka, przedstawiaj�ca trajektorie ruchu modelu wózka dla kolejnych serii symulacji (Rys. 8), prezentuje wraliwo�� parametryczn� ca�ego uk�adu. Analizuj�c powysze wykresy mona zaobserwowa� seri�, dla których model po wykonaniu manewrów oscyluje wokó� zadanego kierunku stopniowo zmniejszaj�c amplitud�. S� to serie n, a, b, c. Przypadki te odpowiadaj� prawid�owemu dzia�aniu uk�adu sterowania.
0 5 10 15 20 25 30 35-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Czas [s]
Par
amet
r reg
ulac
ji
Dzia�anie regulatora PID - cz�owiek
uchybseria nominalseria aseria bseria cseria dseria e

76 W�odzimierz Choroma�ski, Grzegorz Dobrzy�ski, Krzysztof Fiok �
W seriach d, e zaobserwowano utrzymywanie si� amplitudy wychyle� od zadanego kierunku w ca�ym okresie symulacji, co oznacza brak ustabilizowania kierunku jazdy wózka. Przy za�oonym uk�adzie sterowania, wózek zachowuje si� rónie w zaleno�ci od przyj�tych parametrów modelu cz�owieka.
�
Rys. 8. Trajektorie wyznaczone przez model wózka elektrycznego uzyskane przy rónych nastawach regulatora PID modelu cz�owieka
W kolejnym kroku symulacji wskazane wyej serie parametrów opisuj�cych model
decyzji cz�owieka zastosowano do modelu opisuj�cego wózek o nap�dzie r�cznym. Wyniki tych symulacji zestawiano na Rys. 9
Rys. 9. Trajektorie wyznaczone przez model wózka d wigniowego uzyskane przy rónych nastawach regulatora PID modelu cz�owieka
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 104
0
500
1000
1500
2000
2500
3000
3500
Polozenie X [mm]
Pol
ozen
ie Y
[mm
]
Trajektorie ruchu
traj. zadanatraj. zarej. - seria ntraj. zarej. - seria atraj. zarej. - seria btraj. zarej. - seria ctraj. zarej. - seria dtraj. zarej. - seria e
0 0.5 1 1.5 2 2.5 3
x 104
-500
0
500
1000
1500
2000
2500
3000
3500
Po�o�enie X [mm]
Po�
o�en
ie Y
[mm
]
Trajektorie ruchu
traj. zadanaWR - seria nWR - seria aWR - seria bWR - seria cWR - seria dWR - seria e

Wózki inwalidzkie - badania symulacyjne pod�ania za zadanym torem jazdy 77
Powysze symulacje pozwoli�y odrzuci� parametry, które przy zastosowaniu do uk�adu sterowania w prototypie mog�yby w trakcie jego testów zagraa� bezpiecze�stwu osób prowadz�cych wózek. Dzia�ania te pozwoli�y te ograniczy� zakres parametrów testowanych na omawianej konstrukcji prototypowej.
4. WNIOSKI
W pracy omówiono badania symulacyjne z zakresu jazdy po wyznaczonym torze ruchu. Przedstawiono wyniki symulacyjne modelu opracowanego w �rodowisku Matlab-Simmechanics. Symulacje te zrealizowano w dwóch etapach. W wyniku I etapu uzyskano wyniki dla modelu nominalnego, które sta�y si� podstaw� porównania z wynikami symulacji dla zmienianych parametrów w II etapie.
Wyniki symulacji wskaza�y potrzeb� budowy modelu sterowania o innych parametrach, jak równie o innej strukturze (np. uwzgl�dniaj�cej ucz�cy si� model cz�owieka). S�usznym wydaje si� podj�cie prac zmierzaj�cych do identyfikacji parametrów modelu cz�owieka steruj�cego wózkiem inwalidzkim. Uzyskane wyniki naley traktowa� jako wst�pn� analiz� problemu, gdy w symulacjach wykorzystano opisy modeli cz�owieka b�d�cego kierowc� samochodu, co do którego, ze wzgl�du na wi�ksze pr�dko�ci jazdy, formu�uje si� inne wymagania.
Przygotowane modele symulacyjne daj� moliwo�� prowadzenia dalszych prac badawczych, w których nalea�oby:
� Dokona� analizy bibliotek parametrów modeli opon o z�oonej budowie. � Rozszerzy� analiz� struktur sterowania pojazdami nap�dzanymi przez dwa silniki
elektryczne.
Bibliografia �1. Augustynowicz A.: Modelowanie typu kierowcy samochodu, Oficyna Wydawnicza Politechniki
Opolskiej, Opole, 2009. [URL: http://www.dbc.wroc.pl/Content/3706/SiM_232_scal_popr.pdf ]. 2. Batogowska A., S�owikowski J.: Atlas antropometryczny doros�ej ludno�ci Polski dla potrzeb
projektowania. Instytut wzornictwa przemys�owego, Warszawa 1994. 3. Blundell M., Harty A.: „The Multibody Approach to Vehicle Dynamics”, Elsevier Butterworth-
Heinemann, Burlington-Oxford, UK, 2004. 4. Bu�ka D., Walczak S., Wolak S.: Antycypacyjny model kierowcy zastosowany w programie do
symulacji ruchu i zderze� pojazdów v-sim, Zeszyt naukowy Politechniki �wi�tokrzyskiej, Mechanika 84, s.147. Kielce 2006.
5. Choromanski W., G. Dobrzynski, J. Kowara, The dynamics of a mechatronic wheelchair with the function of overcoming physical obstacles; Proceedings of IAVSD 2009 - 21st International Symposium on Dynamics of Vehicles on Roads and Tracks, 17 – 21 August 2009, KTH, Stockholm, Sweden, CD - volume I, p.143-146.
6. Choroma�ski W., Fiok K., Dobrzy�ski G.: Optimizing the lever propelling system for manual wheelchairs, Bulletin of the Polish Academy of Scienses – Technical Sciences, December 2012, pp. 793-800. DOI: 10.2478/v10175-012-0092-8.

78 W�odzimierz Choroma�ski, Grzegorz Dobrzy�ski, Krzysztof Fiok �
7. Dobrzy�ski G, Barwicki M., Choroma�ski W., Modyfikacja modelu oraz badania symulacyjne elektrycznego wózka inwalidzkiego z uwzgl�dnieniem modu�u nap�dowego pasa ramienia poziomuj�cego Raport z prac zrealizowanych w Projekcie Eco-Mobilno��. UD/0044/1160/2011.
8. Dobrzy�ski G, Barwicki M., Identyfikacja parametrów dla modelu symulacyjnego opony „Simple Tire” stosowanego w elektrycznym wózku inwalidzkim. Raport z prac zrealizowanych w Projekcie Eco-Mobilno��. UD/0145/1160/2011.
9. Dobrzy�ski G., Choroma�ski W.; Wózek inwalidzki z opcj� jazdy po schodach – metodyka konstruowania, Acta Mechanica Et Automatica, rok: 2010, Vol. 4, no. 2, s. 37-42.
10. Dobrzy�ski G.: rozprawa doktorska pt: Synteza w�asno�ci mechatronicznego wózka inwalidzkiego jako elementu systemu transportu osób niepe�nosprawnych, Wydzia� Transportu Politechniki Warszawskiej, obrona rozprawy: 25.01.2013r., [dost�p w dniu 10.04.2013r pod adresem: http://bcpw.bg.pw.edu.pl/publication/4062].
11. Dobrzy�ski G.; Badania symulacyjne i eksperymentalne wózka inwalidzkiego z opcj� jazdy po schodach jako elemetu systemu transportu osób niepe�nosprawnych. Materia�y konferencyjne „Transport XXI wieku”, Bia�owiea 21-24.09.2010r.
12. Grabarek I.: „Ergonomia – technika i technologia – zarz�dzanie” : Metodyczne aspekty diagnozowania ergonomicznego uk�adu operator – pojazd szynowy – otoczenie. /pod red. Marka Fertscha, Wydawnictwa Politechniki Pozna�skiej, Pozna� 2009, s. 59-68.
13. Grzesiak L., Choroma�ski W., Grabarek I., Kami�ski G., Ufnalski B., Sczypior J., Brach P., Choroma�ski K., Ambroak A., Nowak J., Koz�owski M., Tomczuk K., Barwicki M., Or�owski J., New Concept of an Electrical City Car and its Infrastructure, materia�y z seminarium polsko-chi�skiego, PAN, ECO-Mobilno��, Politechnika Warszwaska, ITS, Warszawa 16 – 17 czerwiec 2011,
14. Koz�owski M., Tomczuk K., Szczypior J. Methodology of determining basic technical parameters of electric-drive car, Przegl�d Elektrotechniczny (Electrical Review), issn 0033-2097, r. 87 nr 10/2011 pp. 299 – 304.
15. PN-EN 12184:2010 Wózki inwalidzkie z nap�dem elektrycznym, skutery i ich zasilanie - Wymagania i metody bada�.
16. PN-ISO 7176-11:1998 Wózki inwalidzkie - Manekiny do bada�. 17. Praca zbiorowa pod redakcj� W�odzimierza Choroma�skiego: Transport osób niepe�nosprawnych –
wózki innowacyjne dla osób z upo�ledzonym uk�adem ruchowym, Oficyna Wydawnicza Politechniki Warszawskiej, Warszawa 2009.
18. TNO: Netherlands Organisation for Applied Scientific Research TNO - Web Page: http://www.tno.nl . 19. TU Delft: Delft University of Technology – Web Page: http://home.tudelft.nl/. 20. Zegelaar P. W. A., The dynamic response of tyres to brake torque variations and road unevennesses,
Delft University of Technology 1998, podr�cznik ze strony web page: http://www.tno.nl .
WHEELCHAIRS – SIMULATION STUDY OF FOLLOWING A PREDETERMINED RIDE PATH
Summary: The article presents results of simulation studies regarding the issue of following a predetermined ride path by wheelchairs. Both electric and manual lever-driven wheelchairs were analyzed. The aim of here presented simulations was to assess the influence of various drive models on the wheelchairs’ ability to follow the given ride path. Keywords: wheelchair, simulation study, MBS
Top Related