[Żelazny] - Podstawy Automatyki
![download [Żelazny] - Podstawy Automatyki](https://fdocuments.pl/public/t1/desktop/images/details/download-thumbnail.png)
of 142
-
Upload
karolina-rokosz -
Category
Documents
-
view
1.984 -
download
513
Transcript of [Żelazny] - Podstawy Automatyki
Materiay pomocnicze do wykadu: Podstawy Automatyki Opracowa: doc. dr in. Marek elazny 2 Wprowadzenie Niniejszemateriaypomocniczeniestanowisamodzielnegotekstu zastpujcego wykad. Opracowanoje,byuatwistudentomsuchaniewykadw,by uwolniichodprzenoszeniadowasnychnotatekwikszoci rysunkw i tablic prezentowanych podczas wykadu. Materiaytestanowibdistotnpomocwprzygotowaniu suchaczydowicze,laboratoriwiegzaminu,jeeliuzupenione zostanwasnyminotatkamiikomentarzamipodczaswykadw. Naleybowiempamita,ewykadzawierawieledodatkowych elementwitylkojegowysuchanie,poczonezmoliwoci dyskusjiiwyjanieniawtpliwoci,dajegwarancjdobrego opanowania przedmiotu PODSTAWY AUTOMATYKI. 3 Spis Treci: 0POJCIA PODSTAWOWE...... 5 1.OPIS MATEMATYCZNY UKADW LINIOWYCH ..................................................9 2.PODSTAWOWE ELEMENTY LINIOWE..................................................................15 2.1.Zaoenia upraszczajce.................................................................................................... 15 2.2.Elementy bezinercyjne (proporcjonalne)......................................................................... 17 2.3.Elementy inercyjne pierwszego rzdu.............................................................................. 19 2.4.Elementy cakujce ............................................................................................................ 22 2.5.Elementy rniczkujce..................................................................................................... 24 2.6.Elementy oscylacyjne......................................................................................................... 26 2.7.Elementy opniajce ........................................................................................................ 30 3.UKADANIE SCHEMATW BLOKOWYCH............................................................32 3.1.Zasady budowy schematw blokowych ........................................................................... 32 3.2.Wzy informacyjne i sumacyjne...................................................................................... 32 3.3.Przeksztacanie schematw blokowych............................................................................ 36 3.4.Przykady ukadania (tworzenia) schematw blokowych .............................................. 41 4.CHARAKTERYSTYKI CZSTOTLIWOCIOWE .....................................................43 4.1.Transmitancja widmowa. Rodzaje charakterystyk czstotliwociowych. .................... 43 4.2.Logarytmiczne charakterystyki amplitudowa i fazowa elementu inercyjnego pierwszego rzdu............................................................................................................................. 45 4.3.Charakterystyka amplitudowo-fazowa oraz logarytmiczne charakterystyki amplitudowa i fazowa elementu rniczkujcego rzeczywistego ............................................... 48 4.4.Charakterystyka amplitudowo-fazowa oraz logarytmiczne charakterystyki amplitudowa i fazowa elementu drugiego rzdu.......................................................................... 49 4.5.Logarytmicznecharakterystykiczstotliwocioweszeregowegopoczeniaelementw........................................................................................................................................ 54 5.UKADY LINIOWE DYSKRETNE (IMPULSOWE) .................................................55 5.1.Pojcia podstawowe ........................................................................................................... 55 6.OBIEKTY REGULACJI I REGULATORY PRZEMYSOWE...................................60 6.1.Definicje i klasyfikacje obiektw...................................................................................... 60 6.2.Metody identyfikacji .......................................................................................................... 61 6.3.Regulator PID..................................................................................................................... 64 6.4.Regulatory mikroprocesorowe.......................................................................................... 67 6.5.Wykorzystanie sterownikw PLC do regulacji............................................................... 69 6.6.Regulacja lub sterowanie w trybie soft-control........................................................... 69 7.WYMAGANIA STAWIANE UKADOM AUTOMATYKI..........................................70 7.1.Stabilno............................................................................................................................ 70 4 7.2.Dokadno statyczna......................................................................................................... 84 7.3.Jako dynamiczna ............................................................................................................ 86 8.DOBR RODZAJU I NASTAW REGULATORW...................................................90 8.1.Wybr rodzaju (typu) regulatora..................................................................................... 90 8.2.Dobr nastaw regulatora................................................................................................... 91 9.STRUKTURY UKADW REGULACJI....................................................................93 9.1.Uoglniona struktura jednoobwodowa............................................................................ 93 9.2.Regulacja kaskadowa ........................................................................................................ 93 9.3.Regulacja stosunku............................................................................................................ 95 9.4.Kaskadowa regulacja stosunku ........................................................................................ 96 9.5.Ukady z pomocnicz korekcj dynamiczn: .................................................................. 96 9.6.Ukady zamknito-otwarte................................................................................................ 97 10.WACIWOCI STATYCZNE I STABILNO UKADW NIELINIOWYCH......98 10.1.Rodzaje elementw nieliniowych. Charakterystyki statyczne. ...................................... 98 10.2.Stabilno ukadw nieliniowych. ................................................................................... 103 11.METODA PASZCZYZNY FAZOWEJ....................................................................105 12.METODA FUNKCJI OPISUJCEJ.........................................................................115 12.1.Pojcie funkcji opisujcej................................................................................................ 115 12.2.Zastosowanie funkcji opisujcej do badania stabilnoci ukadw nieliniowych........ 122 13.REGULACJA DWUPOOENIOWA......................................................................126 14.REGULACJA TRJPOOENIOWA......................................................................133 14.1.Struktura podstawowa. ................................................................................................... 133 14.2.Regulatory krokowe......................................................................................................... 136 15.ANALIZA PRZEKANIKOWYCH UKADW STEROWANIA METOD GRAFICZN.....................................................................................................................138 5 0.POJCIA PODSTAWOWE Szerokizakreszastosowaautomatykizmuszadouywaniabardzooglnychpoj podstawowych i reprezentacji graficznej w postaci schematw blokowych, ktre to pojcia i schematymogbystosowanezarwnoprzyomawianiuzagadnieteoretycznychjaki aplikacji przemysowych, medycznych, wojskowych lub w dowolnej innej - automatyzowanej - dziedzinie dziaalnoci czowieka. Kilka zasadniczych poj: Sygna-wielkofizycznawystpujcawprocesiesterowaniabdcanonikiem informacji. Informacja - warto lub ksztat przebiegu sygnau. Elementautomatyki(czon)-podzesp,zesp,przyrzdluburzdzenie.wktrymmona wyrni sygna wejciowy i sygna wyjciowy - rys. a, lub sygnay wejciowe i wyjciowe - rys. b. a) b)......uyu1u2umy1y2yn Ukadautomatyki-zespwzajemniepowizanychelementwbiorcychudziaw sterowaniuautomatycznymdanegoprocesu(uporzdkowanyzgodniezkierunkiem przekazywania sygnaw) Sterowanieautomatyczne-oddziaywanienaproces,ktregozamierzonyprzebiegchcemy uzyskabezudziauczowieka,zapomocurzdzenazywanychoglnieaparatur automatyki. Wyrnia si: sterowanie w ukadzie otwartymsterowanie w ukadzie zamknitym Oglny schemat otwartego ukadu sterowania przedstawiono niej: wuz zyU.S. O Nomenklatura: w - warto zadana wielkoci sterowanej u - sygna sterujcy y - wielko sterowana z - sygnay zakcajce (zakcenia) 6 U.S. - urzdzenie sterujce O - obiekt (proces) podlegajcy sterowaniu Zamknity ukad sterowania, nazywany czsto ukadem ze sprzeniem zwrotnym, ma nastpujcy schemat blokowy: euz zyU.S. Ow+-tor gwny wysprzenie zwrotnee=w-y gdzie: e - odchyka (uchyb) sterowania Tor gwny wskazuje zawsze zasadnicz wielko wejciow ukadu (w tym przypadku w) i wielko wyjciow y. Tor ten ilustruje zwykle przepyw gwnego strumienia materiau lub energii w ukadzie. Tor sprzenia zwrotnego suy do przekazywania informacji. Zapotrzebowanie energetyczne tego toru jest zwykle pomijanie mae. Ze wzgldu na zadanie realizowane przez ukad wyrnia si: a)ukady stabilizujce b)ukady programowe c)ukady nadne d)inne Te grupy zamknitych ukadw sterowania, zwaszcza dwie pierwsze, nazywa si czsto ukadami regulacji automatycznej. Pociga to za sob zmian nazewnictwa: y - wielko regulowana w - warto zadana wielkoci regulowanej e - odchyka regulacji R - regulator (zamiast urzdzenia sterujcego) O - obiekt regulacji (proces regulowany) A. Ukady stabilizujce (ukady regulacji staowartociowej), w=const. Zadaniem ukadu jest utrzymanie moliwie staej, podanej wartoci wielkoci wyjciowej oraz minimalizacja wpywu zakce na t wielko. Czsto gwne zakcenia wchodz wraz ze strumieniem materiau lub energii na obiekt, tworzc tor gwny od z1 do y. 7 Schemat blokowypodstawowy:e=y-weyROz1u-+-+yz2wReprezentacjarwnowana:Z reguy rozpatruje si przebiegiwok nominalnego punktu pracyopuszczajc symbole""e=yROz1u-+ yz2 Przykady: regulacja cinienia, poziomu cieczy, natenia przepywu, pH itd. B.Ukady programowe (regulacji programowej, sterowania programowego), w=w(t). Zadaniem ukadu jest uzyskanie przewidzianych okrelonym programem czasowym zmian wielkoci regulowanej (sterowanej). Dlapowolnychzmianw(t),np.regulacjatemperaturywbudynku,schematblokowyma posta jak dla p. A, dla szybkich zmian w(t) - jak dla p. ,.C. Inneprzykady:programowaregulacjatemperaturywpiecuhartowniczym,wautoklawie, programowaregulacjajednejlubkilkuwielkociwprocesierozruchu(stopniowe dochodzenie do nominalnego stanu pracy). C. Ukady nadne (serwomechanizmy), w=w[(t)]. Zadaniem ukadu jest nadanie wielkoci wyjciowej y za zmieniajc si w nieznany nam sposb wartoci zadan w. Schemat blokowy podstawowy: 8 euzyR Ow+- zyOu ++Gdy zakcenia wchodzna wejciu obiektu: Przykady: sterowanie pooeniem y dzia przeciwlotniczych wg wskaza radaru okrelajcego pooenie w samolotu; sterowanie pooeniem y pisaka rejestratora wg aktualnej wartoci w mierzonej i rejestrowanej wielkoci fizycznej.D.Inne Wpunktacha,b,cwymieniononajczciejrealizowanezadaniaukadwautomatykio dziaaniu cigym, omawianych w przedmiocie PODSTAWY AUTOMATYKI. Penalistazadajestbardzoszeroka,staleuzupenianaiobejmujem.in.optymalizacj przebieguprocesw(np.minimalizacjzuyciaenergii,minimalizacjkosztwlub maksymalizacjzyskuprzyzaoonychograniczeniach),realizacjproceswdyskretnych (sekwencyjnych, np. montau) oraz wiele innych. 9 1.OPIS MATEMATYCZNY UKADW LINIOWYCH Ukadyrzeczywistezwyklesnieliniowe,aledlauproszczeniaopisumatematycznego przeprowadzasiichlinearyzacj,copozwalanasformuowanieprzyblionegoopisu liniowego,wanegowotoczeniuwybranegopunktupracynacharakterystycestatycznej (punkt ten odpowiada najczciej nominalnym lub urednionym warunkom pracy ukadu). Po linearyzacji ukady opisywane s za pomoc liniowych rwna rniczkowych o staych wspczynnikach ai i bi. Oglna posta rwnania rniczkowego ukadu liniowego: u bdtu dbdtu db y adty dadty dammmmmmnnnnnn 0111 0111+ + + = + + +K K ( 1.1) Pocztek ukadu wsprzdnych oznacza nominalny punkt pracy a u i y s odchykami sygnaw od tego punktu. Opis wasnoci ukadw: Charakterystyka statyczna ukadu liniowego lub zlinearyzowanego w otoczeniu nominalnego punktu pracy (u,y s odchykami od tego punktu) ma posta: uaby00=Pocztek ukadu wsprzdnych oznacza nominalny punkt pracy, a u i y s odchykami sygnaw od tego punktu. Waciwocidynamiczneilustrujesizwyklewyznaczajcprzebiegwielkociwyjciowej y(t) po wprowadzeniu na wejcie jednego z typowych wymusze u(t). Wykresy u(t) i y(t) mona rysowa cznie w nastpujcym ukadzie wsprzdnych: y ut Typowe wymuszenia: u1t) ( 1 ) ( t t u =uy10 uustt) ( 1 ) ( t u t ust =tu) ( ) ( t t u =tuat t u = ) ( Wyznaczanie y(t) a.metoda klasyczna b.metoda operatorowa) ( ) ( s f t f , j c s + = =0) ( ) ( dt e t f s fst )] ( [ ) ()] ( [ ) (1s f L t ft f L s f== Metoda operatorowa pozwala zastpi rwnanie rniczkowe tzw. transmitancj operatorow. Transmitancja operatorowa: ) () () (s us ys G = ( 1.2) Wyznaczenie G(s) z rwnania rniczkowego (1.1): ) ( ) ( ) ( ) (011 011b s b s b s u a s a s a s ymmmmnnnn+ + + = + + + K K ( 1.3) m na s a s ab s b s bs Gnnnnmmmm+ + ++ + +=, ) (011011KK ( 1.4) ) () () (s Ns Ms G =Opis elementw na schematach blokowych: uyG(s)...... MG(s)u1u2umy1y2yn 11 (((((
=) ( ) ( ) () ( ) ( ) () ( ) ( ) () (2 12 22 211 12 11s G s G s Gs G s G s Gs G s G s Gs MGnm n nmmKM M M MKK m k n is us ys GkiikK K 1, 1 ,) () () ( = = =(pozostae wejcia i warunki pocztkowe s rwne zeru) Wyznaczenie charakterystyki statycznej z transmitancji operatorowej Dla 01) ( uss u =otrzymujemy: ) ( ) ( lim ) ( lim ) ( lim0 00s u s G s s y s t y ys s t = = = ) ( lim00 0s G u ys=) ( lim000s Gxys= ( 1.5) Kocowerwnaniecharakterystykistatycznejdlaukadwojednymwejciuijednym wyjciu:0000uaby =12TABLICA TRANSFORMAT L.p.Transformata F(s)Orygina f(t)L.p.Transformata F(s)Orygina f(t) 1.1) (t 14.) )( (1b s a s + + a be ebt at 2. s11(t)15.) )( ( b s a ss+ + a bbe aebt at 3. 21st 16.) )( )( (1c s b s a s + + + ) )( )( () ( ) ( ) (a c c b b ae a b e c a e b cct bt at + + 4. 1!+ nsn nt17.) 1 )( 1 (12 1+ + s T s T s 1 22 12 11T Te T e TTtTt+ 5. a s 1 atem 18.22 1) 1 )( 1 (1+ + s T s T 22 1 22 1 2 1 2 1) (] ) ( [2 1T T Te t T T T T e T TTtTt + 6. 2) (1a s attem 19.) 1 )( 1 (2 1+ + s T s Ts ) (1 2 2 12 11 2T T T Te T e TTtTt 7. 1) (!++na sn at ne t 20.2 2a sa+at sin8. ) (1a s s +) 1 (1atea 21.2 2a ss+at cos9. ) (1a s s ) 1 (1atea22.2 2 2) (2a sas+ at t sin10.2) ( a ss+s ate at ) 1 ( 23.2 2 22 2) ( a sa s+at t cos11.2) 1 (1+ Ts s TteTt T+ 124.2 2) ( a b sa+ + at ebtsin 12.2) 1 ( + Tss Tte t TT ) (13 25.2 2) ( a b sb s+ ++ at ebtcos 13.) 1 (12+ Ts s ) 1 (Tte T t 26.) (12 2a s s +) cos 1 (12ata13 Opis ukadw z uyciem wsprzdnych stanu: W oglnym opisie ukadw wielowymiarowych poszczeglne wielkoci okrelone s w postaci wektorw i oznaczaj: (((((
=) () () () (21t ut ut ut UnM - wektor wej, ktrego skadowymi s wielkoci wejciowe u1(t), , un(t) (((((
=) () () () (21t xt xt xt XkM - wektor stanu, ktrego skadowymi s wsprzdne stanu x1(t), , xk(t) (((((
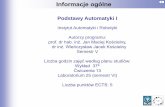
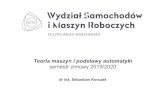
=) () () () (21t yt yt yt YlM - wektor wyj, ktrego skadowymi s wielkoci wyjciowe y1(t), , yl(t) ZbirwszystkichmoliwychwartociwektorastanuX(t)wchwilachttworzyprzestrze stanwukadu(przestrzefazow).Zbirwartociwektorastanuukaduwkolejnych chwilachczasutworzywtejprzestrzenikrzyw,zwantrajektoristanuukadu(trajektori fazow). Rwnanie stanu ukadu opisuje si zwykle w postaci: )] ( ), ( [ ) ( t U t X F t X = ( 1.6) z n warunkami pocztkowymi 0 0) ( X t X = ( 1.7) Rwnanie(1.6)jestzawszerwnaniemrniczkowympierwszegorzdu,woglnym przypadkunieliniowymizalenymjawnieodczasu,aFjestn-elementowfunkcj wektorow. Rwnania (1.6) i (1.7) mona wic rozpisa szczegowo: = == =0 0 2 1 2 110 0 1 2 1 2 1 11) (); ; , , , ; , , , () () (); ; , , , ; , , , () (n n k n nnk nx t x t u u u x x x fdtt dxx t x t u u u x x x fdtt dxK KL L L L L L L L L L L L L L L L L L L L LK K ( 1.8) Rwnanie wyjcia ukadu ma posta: )] ( ), ( [ ) ( t U t X G t Y = ( 1.9) przy czym G jest l-elemetow funkcj wektorow. Nie jest to rwnanie rniczkowe gdy caa dynamika ukadu opisana jest rwnaniem stanu, jest natomiastzalene od czasu. Rozpisujc szczegowo rwnanie (1.9) otrzymamy: 14 ==) ; , , , ; , , , ( ) () ; , , , ; , , , ( ) (2 1 2 12 1 2 1 1 1t u u u x x x g t yt u u u x x x g t yk n l lk nK KL L L L L L L L L L L L L L L LK K ( 1.10) Rwnania (1.8) i (1.10) mog by linearyzowane w otoczeniu wybranego stanu ustalonego (nominalnego punktu pracy), przyjmuj wwczas posta: ttfuufuufuufxxfxxfxxfdtt dxkknn++ ++++ ++=1 1221111 1221111 1) (K K ( 1.11) i tak dalej, natomiast ttguuguuguugxxgxxgxxgykknn++ ++++ ++=1 1221111 12211111K K ( 1.12) i tak dalej. Rwnania (1.11) i (1.12) zapisuje si zwykle skrtowo w postaci macierzowej: ) ( ) ( ) ( ) ( ) ( t U t B t X t A t X + =& ( 1.13) ) ( ) ( ) ( ) ( ) ( t U t D t X t C t Y + = ( 1.14) przy czym: A(t) macierz ukadu stopnia nn B(t) macierz wej stopnia nk C(t) macierz wyj stopnia ln D(t) macierz transmisyjna ukadu stopnia lk PoszczeglneelementymacierzyA,B,C,Dodpowiadajpochodnymczstkowym wystpujcym w rwnaniach (1.11) i (1.12). W przypadku szczeglnym, gdy ukad jest liniowy stacjonarny (o parametrach niezalenych od czasu), pochodne czstkowe wzgldem zmiennych x1,,xn,,u1,,uk nie zawieraj czasu i pochodne czstkowe wzgldem czasu s rwne zeru. Elementy macierzy s wwczas stae i rwnania (1.13) i (1.14) mona zapisa w postaci: ) ( ) ( ) () ( ) ( ) (t DU t CX t Yt BU t AX t X+ =+ =& ( 1.15) 15 2.PODSTAWOWE ELEMENTY LINIOWE 2.1.Zaoenia upraszczajce Wieleelementwautomatykimonatraktowajakoliniowe,jeeliograniczysizakresich pracy i przyjmie nastpujce zaoenia upraszczajce: a)w odniesieniu do elementw mechanicznych - wystpuje jedynie tarcie lepkie (wiskotyczne), a nie tarcie suche (Coulomba); sia tarcia jest proporcjonalna do prdkoci; -sztywnoci elementw sprystych s stale, a pozostaych elementw oraz ich pocze i zamocowa nieskoczenie wielkie; wodniesieniudo elementw pynowych (hydraulicznychi pneumatycznych) -oprprzepywujeststay,tzn.natenieprzepywu pynu jest proporcjonalne do rnicy cinie; -modusprystociobjtociowejpynu(odwrotnowspczynnika ciliwoci) jest stay; b)w odniesieniu do elementw elektrycznych -rezystancje,indukcyjnociipojemnocisstae,niezaleneodprdui napicia. Prcz tych zaoe natury oglnej, w poszczeglnych przypadkach robi bdziemy jeszcze zaoeniaszczeglne,np.idealnaszczelnoelementwhydraulicznych lub pomijalna masa niektrychczciruchomych.Naleywicpamita,erwnaniaicharakterystyki elementwliniowychsuproszczoneiczstomonajestosowatylkodooblicze wstpnych. Elementylinioweklasyfikujesinajczciejzewzgldunaichwasnocidynamiczne. Wyrnimy sze grup elementw podstawowych: 1)bezinercyjne (proporcjonalne), 2)inercyjne, 3)cakujce, 4)rniczkujce, 5)oscylacyjne, 6)opniajce. Wasnoci statyczne wszystkich elementw okrela bdziemy podajc rwnanie i wykres charakterystyki statycznej y = f (u), a wasnoci dynamiczne podajc rwnanie rniczkowe i odpowiadajcmutransmitancjoperatorowaorazwykresodpowiedziy(t)nawymuszenie skokowe. Kad grup elementw ilustruje kilka przykadw, przy czyni w ramach danej grupy s to przykadyurzdzekonstrukcyjnieodmiennych,abypodkreli,epodziazewzglduna wasnocidynamiczneniejestzalenyodnaturyfizycznejelementwienp.elementem inercyjnymmoebyzarwnourzdzeniemechaniczno,jakihydrauliczne,pneumatyczne lub elektryczne. Przyjto nastpujcysystem oznacze: a.Wartociabsolutnesygnawwejciowychiwyjciowychoznaczabdziemy indeksemO,np.u0,y0.Potrzebawyrnianiawartociabsolutnychzachodziprzy analiziestanwustalonych,gdyczstoniewystarczaznajomorwnania 16 charakterystykistatycznejy=f(u)wotoczeniuwybranegopunktupracy,lecztrzeba znarwnierwnanie(lubwykres)charakterystykistatycznejy0=f(u0)wcaym zakresie zmiennoci sygnaw. b.Odchykisygnawwejciowychiwyjciowychodpocztkowegostanuustalonego oznaczabdziemyniedodajcadnychindeksw,np.u,y.Odchykamioperujemy zawsze przy zapisie stanw nieustalonych oraz przy zapisie oglnym. 17 2.2.Elementy bezinercyjne (proporcjonalne) Oglna posta rwnania elementu bezinercyjnego jest nastpujca; y=ku gdzie:ywielkowyjciowa,uwielkowejciowa,kwspczynnikpro-porcjonalnoci (wspczynnik wzmocnienia). Transmitancja elementu bezinercyjnego jest rwna wspczynnikowi proporcjonalnoci: ks us ys G = =) () () (Rwnanie charakterystyki statycznej bdzie: y=ku lub y0=ku0+C gdzie:Cjeststa,okrelajcprzesuniciecharakterystykiwstosunkudopocztkuukadu wsprzdnych. Odpowied na wymuszenie skokowe: u(t)=1(t)ust bdzie: y(t)= 1(t)kust Przykady kilku elementw traktowanych czsto jako bezinercyjne przedstawiono na rys. 2.1 abuyFuFya) abuyFuFyb) u2u1R1R2c) n1n2z1z2e) pAcyf) 18 d)rx12 g)xy Rysunek 2.1 Przykady elementw bezinercyjnych (proporcjonalnych): a, b) dwignia, c) dzielnik napicia, d) przekadnia cierna, e) przekadnia zbata, f) siownik pneumatyczny, g) mechanizm krzywkowy 19 2.3.Elementy inercyjne pierwszego rzdu Oglnapostarwnaniarniczkowegoelementuinercyjnegopierwszegorzdujest nastpujca: ku ydtdyT = +skd wynika transmitancja 1 ) () () (+= =Tsks us ys Ggdzie:k wspczynnik proporcjonalnoci T staa czasowa (ma wymiar czasu) Rwnanie charakterystyki statycznej bdzie ku y = Odpowied na wymuszenie skokowe u(t)=1(t)ust wynosi: stuss u1) ( =)1(1) 1 () (Ts suTkuTs sks yst st+=+=) 1 ( )] ( [ ) (1 T tste T uTks y L t y = =) 1 ( ) (T tste ku t y = ) 1 ( ) (Ttste ku t y = Rysunek 2.2 Odpowied elementu inercyjnego pierwszego rzdu na wymuszenie skokowe. Wykres y(t) przedstawiono na rys.2.2. Sta czasow T mona okreli wystawiajc styczn w dowolnympunkciekrzywejwykadniczejy(t)iwyznaczajcodcinekpodstycznejna asymptocie: TeTkue ku kudtdyy kupodstycznaT tstT tst st st= ==1) 1 ( Sta czasow T mona rwnie okreli jako czas od chwili t=0 do chwili, kiedy y(t) osiga 63,2% swej kocowej wartoci ustalonej kust. Podstawiajc t=T otrzymujemy bowiem: ytkustT T0,632kust20 st stku e ku t y 632 , 0 ) 1 ( ) (1= = Przykadprocesu,ktrypolinearyzacjiopisywanyjestrwnaniemelementu inercyjnego I rzdu przedstawiony jest na rys. 2.3. Sygnaami wejciowymi s Q1 natenie przepywucieczyorazfprzekrjprzepywowyzaworu.Sygnaemwyjciowymjesth poziom cieczy w zbiorniku. Warunkiem stanu ustalonego jest: 20 10Q Q =Q1A1Q2221hf Rysunek 2.3 Zbiornik z wypywem swobodnym cieczy Ukadamy rwnanie Bernoulliego dla przekrojw 1-1 i 2-202 2222 121+ + = + + pgvhpgv Przyjmujc prdko v1=0oraz p1=p2 (cinienie atmosferyczne) otrzymamy gh v 22= Na podstawie rwnania cigoci 2 2fv Q =otrzymujemy gh f Q 22= Otrzymujemy zatem rwnanie charakterystyki statycznej: 2021002gfQh = Wykrescharakterystykistatycznejdlaf0=constprzedstawiononarys.2.4a,adlaQ10=const na rys. 2.4b h0hnQ1nQ10f0=consta)
h0hnfnf0Q10=constb) Rysunek 2.4 Charakterystyki statyczne procesu gromadzenia cieczy w zbiorniku z wypywem swobodnym 21 W stanach nieustalonych zmiany poziomu cieczy w zbiorniku mona opisa za pomoc rwnania: 2 1Q QdtdhA =gdzie A jest powierzchni przekroju poprzecznego zbiornika (wm2). Poniewa charakterystyki statyczne s krzywoliniowe, aby opisa element za pomoc liniowegorwnaniarniczkowego,naleyprzeprowadzilinearyzacj.Wsprzdne nominalnegopunktupracyoznaczamyhn,Q1n,fn.Wotoczeniutegopunkturzeczywiste przyrostyzmiennychhorazQ2zastpimyprzyrostamiprzyblionymi,ktrewystpiybyw przypadkuliniowejcharakterystykistatycznejonachyleniupokazanymnarys.2.4.Dla odrnieniazapisuwszystkieprzyrostyoznaczymyterazdodajcsymbol.Otrzymamy wic: 2 1Q Qdth dA = PrzyrostQ2 zastpujemy rniczk zupen hhgf f gh hhQffQQnn nnn + = ||
\|+ |||
\|= 222 22 Zatem otrzymamy: f k Q k hdth dT = +2 1 1 gdzie: nnhgfAT2= ,nnhgfk211= ,nnfhk22= W dalszym cigu czsto opuszcza bdziemy znaki , pamitajc jednak zawsze, e w rwnaniu wystpuj przyrosty poszczeglnych wielkoci. Napiszemy wwczas f k Q k hdtdhT2 1 1 = + W przypadkach szczeglnych, kiedy f0=const (f=0), 1 1Q k hdtdhT = + , a kiedy Q10=const (Q1=0), f k hdtdhT = +2 22 2.4.Elementy cakujce Oglna postarwnania rniczkujcego elementu cakujcego jest nastpujca: kudtdy=lub po scakowaniu, przy zerowych warunkach pocztkowych, =tudt k y0 stdwynika transmitancja sks us ys G = =) () () (Rwnanie charakterystyki statycznej ma posta 0 = ua jej wykres podano na rys. 2.5 uyu0y00a) b)un Rysunek 2.5 Charakterystyka statyczna elementu cakujcego: a) wsprzdne odchyek, b) wspozdne wartoci absolutnych Odpowied na wymuszenie skokowe u(t)=1(t)ust wyznaczamy: stusks usks y2) ( ) ( = =t ku s y L t yst= =)] ( [ ) (1 Wykres y(t) podano na rys. 2.6a. Wprzypadkuszczeglnym,kiedywejcieiwyjciessygnaamijednoimiennymi, wspczynnikkmawymiarodwrotnociczasu.Wwczasoglnapostarwnania rniczkowego elementu cakujcego ma posta: udtdyT =ktrej odpowiada transmitancja Ts s us ys G1) () () ( = =gdzie T jest sta czasow akcji cakujcej lub krcej sta cakowania. Sta t mona odszuka na wykresie odpowiedzi skokowej zgodnie z rys. 2.6b. 23 a) b)tuyusty(t)u(t)arctg kusttuyusty(t)u(t)T Rysunek 2.6 Odpowiedzi skokowe elementu cakujcego: a) G(s)=k/s, b) G(s)=1/Ts Przykad elementu cakujcego: zesp rozdzielacz siownik hydrauliczny Schemat zespou przedstawiono na rys. 2.7. Wielkoci wejciow jest przesunicie u toczkw rozdzielacza, wielkoci wyjciow jest przesunicie y toczyska siownika. Zaoenia: a)const pz= ,const ps=b)obcienie siownika ma warto zerow c)prdko przepywu oleju przez szczeliny rozdzielaczaconst v =(wynika to z zaoe a i b). Stanustalonyconst y = zachodzidla0 = u .Charakterystykastatycznamaksztat podany na rys. 2.6a. Stan dynamiczny: dtdyA Q =gdzie:Q natenie przepywu oleju przez szczeliny rozdzielacza A powierzchnia efektywna toka siownika Uwzgldniajcrwnanie cigoci ubv Q =(ub jest przekrojem szczeliny przepywowej) otrzymamy udtdyT =gdziebv A T / =Transmitancja elementu Ts s us ys G1) () () ( = =yAupzps Rysunek 2.7 Zesp rozdzielacz-siownik hydrauliczny 24 2.5.Elementy rniczkujce 2.5.1.Idealny element rniczkujcy Rwnanie idealnego elementu rniczkujcego jest nastpujce: dtduk y =skd wynika transmitancja kss us ys G = =) () () (Wspczynnik k definiuje si jako dtduyk =Wstanieustalonymy=0(y0=const)dlawszystkichu.Wykresycharakterystykistatycznej podano na rys.2.8. uyu0y00a) b)yn Rysunek 2.8 Charakterystyka statyczna elementu rniczkujcego: a) wsprzdne odchyek, b) wsprzdne wartoci absolutnych OdpowiednawymuszenieskokowejestfunkcjDiracapomnoonprzezkoraz przez amplitud skoku ust. Mamy bowiem stku s ksu s y = = ) ( ) () ( )] ( [ ) (1t ku s y L t yst = = >= T k L log 20 log 20 ) ( =Pulsacja (czstotliwo ktowa)T / 1 = nazywana jest pulsacj sprzgajc i oznacza si j symbolem s lub 0 . 0.1 1 10 100201001020- 20 dB/dek/sL()dBab Rysunek 4.5 Logarytmiczna charakterystyka amplitudowa elementu inercyjnego pierwszego rzdu dla k = 10: a rzeczywista, b asymptotyczna Wykresyrzeczywistejiasymptotycznej charakterystyki amplitudowej podano na rys. 4.5.Nachylenieopadajcegoodcinkacharakterystykiasymptotycznej(dlaT / 1 < ) okrelimy obliczajc przyrost) ( Lna dekad: dBT k T k L L20 ) 10 log( 20) log( 20 log 20 ) 10 log( 20 log 20 ) ( ) 10 ( = =+ = ( 4.11) 47 W tablicy 4.1 zestawiono kilka wartoci bdu popenianego przy operowaniu charakterystyk asymptotyczn, a na rys. 4.6 przedstawiono wykres tego bdu jako funkcj S / . Tablica 4.1 S 0,10,250,40,51,0102,54,010,0 ) ( L 0,040,320,651,03,011,00,650,320,04 /sL()dB0.1 1 103210 Rysunek 4.6 Wykres bdu) ( L Wpraktyce,przyobliczeniachwstpnychposugujemysicharakterystykami asymptotycznymi,aprzyobliczeniachdokadnychcharakterystykamirzeczywistymi,ktre otrzymujemyprzezdodaniewykresuprzedstawionegonarys.4.8(lubpoprawekwedug tablicy 4.1) do charakterystyk asymptotycznych. Logarytmiczna charakterystyka fazowa: ) ( ) () () () ( T arctg T arctgPQarctg = = = Wykres) ( podano na Rysunek 4.7. Na tym samym rysunku liniami kreskowanymi zaznaczono stosowane niekiedy aproksymacje trjodcinkowe krzywej) ( . Rysunek 4.7 Logarytmiczna charakterystyka fazowa elementu inercyjnego pierwszego rzdu 48 4.3.Charakterystyka amplitudowo-fazowa oraz logarytmiczne charakterystyki amplitudowa i fazowa elementu rniczkujcego rzeczywistego Transmitancja widmowa rzeczywistego elementu rniczkujcego ma posta: 1) (+=TjTjj G ( 4.12) Czci rzeczywista i urojona) ( j G : 1) (2 22 2+=TTP , 1) (2 2+=TTP ( 4.13) Wykres) ( j Gma posta pokrgu o rednicy l, ze rodkiem w punkcie||
\|0 ,21j(rys. 4.8). [ ] [ ]1log 20 ) ( ) ( log 20 ) (2 22 2+= + = TTQ P L ( 4.14) 1 log 20 log 20 ) (2 2+ = T T L ) ( 90 )1() () () (0 T arctgTarctgPQarctg = = = ( 4.15) Rysunek 4.8 Charakterystykirzeczywistego elementu rniczkujcego: a) charakterystyka amplitudowo-fazowa, b) logarytmiczne charakterystyki amplitudowa i fazowa Wykresy) ( L i) ( przedstawionopowyej.Liniamicigymizaznaczono charakterystykirzeczywiste,aliniamikreskowanymicharakterystykiasymptotyczne,przy czymasymptotyczncharakterystykfazownarysowanozgodniezaproksymacj) ( b. Wszystkie uwagi dotyczce dokadnoci charakterystyk asymptotycznych, a w szczeglnoci wykresy bdu podane na rys. 4.6,pozostaj wane. 49 4.4.Charakterystyka amplitudowo-fazowa oraz logarytmiczne charakterystyki amplitudowa i fazowa elementu drugiego rzdu Zbadamy charakterystyki elementu o transmitancji widmowej: ( ) ( ) ( )02 202020 02202 2) ( + =+ +=jkj jkj G ( 4.16) Gdzie:k wspczynnik proporcjonalnoci 0 pulsacja oscylacji wasnych elementu zredukowany (wzgldny) wspczynnik tumienia Elementtenomwionowp.2.6,zalenieodwartocijegoodpowiedziskokowemogby oscylacyjne lub aperiodyczne. Czci rzeczywista i urojona: 202 2 202 2020) 2 ( ) () () ( + =kP , 202 2 2030) 2 ( ) (2) ( + =kQ ( 4.17) P()jQ() = 02 13 = 3 z ) (4t t 1 ) ( ) (4i inT nT 1 52 3 4) 1 () 1 11 11 (+ + +zz z z z Ti 1 > z ) (5t t 1 ) ( ) (5i inT nT 1 62 3 4 5) 1 () 1 26 66 26 (+ + + +zz z z z z Ti 1 > z ) (t eat1 ) (ianTnT ei1iaTe zz iaTe z > ) (t eat1 ) (ianTnT ei1iaTe zz iaTe z > ) ( 1 ( t ) eiaT1 ) ( 1 (ianTnT ) ei1 ) )( 1 () 1 (iiaTaTe z ze z iaTe z> ) (t teat1 ) (ianTinT e nTi1 2) ()iiaTaTie zze T iaTe z> t t sin ) ( 1 i inT nT sin ) ( 1 1 cos 2sin2+ iiT z zT z 1 > z t t cos ) ( 1 i inT nT cos ) ( 1 1 cos 2cos22+ iiT z zT z z 1 > z t e tat sin ) (1 ianTinT e nTi sin ) (1aTiiaTiaTe T ze zT zeii2 2cos 2sin + iaTe z> t e tat cos ) (1 ianTinT e nTi cos ) (1aTiiaTiaTe T ze zT ze zii2 22cos 2cos + iaTe z> 60 6.OBIEKTY REGULACJI I REGULATORY PRZEMYSOWE 6.1.Definicje i klasyfikacje obiektw Wg PN-88/M-42000: Obiektregulacji(sterowania)-urzdzenielubzestawurzdze,wktrymprzebiega procestechnologicznyiwktrymprzezzewntrzneoddziaywaniesterujcerealizujesi podany algorytm dziaania. Z punktu widzenia automatyka: Obiekt regulacji (sterowania) jest jednym z elementw ukadu regulacji (sterowania), ookrelonychwejciachiwyjciach,owasnociachopisanychokrelonymmodelem matematycznym.Obiektemtymjestprocestechnologiczny(fizyczny,biologiczny,inny) zachodzcywokrelonymurzdzeniulubzestawieurzdze,podlegajcyregulacji (sterowaniu) zapewniajcej jego podany przebieg. Klasyfikacje obiektw: a) liniowo liniowe nieliniowe b) osiganie (lub nie) stanu rwnowagi trwaej po wymuszeniu skokowym statyczne (bez akcji cakujcej) astatyczne (z akcj cakujc) 0u ystatyczne astatyczneu y u yu(t) u(t)t ty(t)y(t)1 3 2 4 5 6 c) stacjonarno stacjonarne niestacjonarne d)wymiarowo jednowymiarowe wielowymiarowe 61 Modele obiektw stosowane do identyfikacji : a)deterministyczne np.: dla obiektw statycznych:1) (+=Tske s Gs lubnss Tke s G) 1 ' () ('+= dla obiektw astatycznych:ske s Gs = ) (lub) 1 () (+=Ts ske s Gs dla wszystkich obiektw liniowych: ) () () (j uj yj G = b) stochastyczne MA - model ruchomej redniej, y(k)=B(z)u(k)+ (k) AR - model autoregresyjny, y(k)A(z)=y(z) ARMA - A(z)y(k)=B(z)u(k)+ (k) ARMAX- A(z)y(k)=B(z)u(k)+D(z)(k) i inne 6.2.Metody identyfikacji A.Analityczne Napodstawieopisuwasnocifizyko-chemicznychprocesu,rwnabilansu materiaowego i bilansu energetycznego uzyskuje si analityczny opis wasnoci obiektu, tzw. model globalny, wany w caym zakresie pracy. B.Eksperymentalne Mogbyopartenaeksperymencieczynnym(deterministyczneistochastyczne)lub biernym (tylko obserwacja naturalnych wej i wyj). Spordmetoddeterministycznychnajprostszainajpopularniejszajestmetodaodpowiedzi skokowejobiektu,pozwalajcanawyznaczenieparametrwobiektunapodstawieprostych konstrukcji graficznych a)obiekty statyczne model opnienie + inercja I rzdu 1) (+=Tske s Gs i T - z wykresu ststukuk = 62 model Strejca nss Tke s G) 1 ' () ('+= Strejc wykaza, e dla obiektw inercyjnych wyszego rzdu stosunek b/T oraz i zale tylko od n nb/Ti T/Tb/T 10010 20,1040,2642,720,28 30,2180,3233,700,80 40,3190,3534,461,42 50,4100,3715,122,10 Zmierzona warto b/T pozwala okreli n. Przy braku dokadnej odpowiednioci b/Tn wybiera si warto n bezporednio nisz i odczytuje si odpowiadajc jej warto (b/T) b/T (b/T) = d = d T = t + Przykad W obiekcie 0u y wprowadzono zakcenie skokowe u(t) = 5V l(t) i zmierzono nastpujce parametry zarejestrowanej odpowiedzi skokowej: t = 0 b = 3s T = 11,7 s b/T = 0,257 yst = 12V Wybiera si n=3, wic (b/T) = 0,218, T/T = 3,70 Obliczamy: 1)T = T / 3,70 = 3,16s 2)d = b/T (b/T) = 0,039 = d T = 0,45s,t = 0 = 0,45s 3)k = yst / ust = 2,4 ostatecznie: 345 , 0) 1 16 , 3 (4 , 2) () () (+= =ses us ys Gs 63 b)obiekty astatyczne Najczciej stosowane modele obiektw: ske s Gs = ) (lub ) 1 () (+=s sks G (dla t 0) s Te s Gis1) ( =) 1 (1) (+=s s Ts Gi (dla t 0) Podczasstosowaniastochastycznychmetodidentyfikacjistosujemywczeniejwymienione modeleAR,MA,ARMA,ARMAX,(ARX,Box'a-Jenkinsa,...),przyuyciunastpujcych estymatorw: najmniejszej sumy kwadratw LS zmiennej instrumentalnej IV najwikszej wiarygodnoci ML Stosowanestemetodykorelacyjneorazmetodamodeluodniesienia(symulacyjna) polegajcanautworzeniumodeluobiektuijegodostrajanieadouzyskaniazgodnoci wyjcia modelu z wyjciem obiektu Wikszo wymienionych ostatnio metod wymaga uycia oprogramowania specjalistycznego. Przykady takiego oprogramowania: MATLAB - System Identification Toolbox EDIP - Opracowany w Politechnice lskiej IdCAD- Opracowany w Instytucie Automatyki i Robotyki PW Procedury identyfikacyjne maj zwykle charakter iteracyjny i dziaaj wg nastpujcego schematu 64 Dokadno modeluzadowalajca?Wybr klasy modeluWybr struktury modeluEstymacja parametr w modelu owybranej strukturzeSprawdzenie dokadnoci modeluStosowanie modeluZmiana struktury modeluNIE TAK 6.3.Regulator PID Usytuowanieregulatorawukadzieregulacjiautomatycznejpokazanonaponiszym rysunku.Sygnaemwejciowymjestodchylenieregulacjie=y-w,awyjciowymsygna sterujcy u. Re ueyROzu-+yw+ (-)- (+)( + ) Podstawowe rodzaje regulatorw o dziaaniu cigym lub quasi-cigym realizuj funkcje PID (dziaania: P proporcjonalne, I cakujce, D rniczkujce). 65 Dla liniowych regulatorw o dziaaniu cigym algorytm PID ma posta: a)idealny )11 () () () ( s Ts Tks es us Gdip+ + = =b)rzeczywisty )111 () () () (++ + = =Tss Ts Tks es us Gdip gdzie: pk wzmocnienie proporcjonalne iT czas zdwojenia (staa czasowa akcji cakujcej) dT czas wyprzedzenia (staa czasowa akcji rniczkujcej) TTkdd= wzmocnienie dynamiczne (najczciej 410) JeelidziaaniePIDrealizowanejestnadrodzecyfrowej(wregulatorze mikroprocesorowymlubkomputerze),touzyskujesijezapomocalgorytmupozycyjnego lub przyrostowego, ale dla operatora efekt kocowy jest taki sam. Tablica odpowiedzi skokowych regulatorw PID przedstawiona jest na nastpnej stronie. Wkonkretnychrozwizaniachkonstrukcyjnychregulatorwprzyrzdyterealizuj oprczalgorytmwPIDwieledodatkowychfunkcji.Wszczeglnociwregulatorach wyznaczaneszawszeodchykiregulacjie=y-wlube=w-y(dziaanieprostelubodwrotne) oraz generowany jest wewntrzny sygna wartoci zadanej w. 66Rodzaj regulatora Transmitancja i rwnanie charakterystyki skokowej Charakterystyka skokowa Rodzaj regulatora Transmitancja i rwnanie charakterystyki skokowej Charakterystyka skokowa P pk) ( 1 ) ( t e k t ust p= PD rzeczywisty )11 (++Tss Tkdp ) 1 ( ) (Ttdst peTTe k t u+ = I s Ti1 tTet uist= ) ( PID )11 ( s Ts Tkdip+ +)] (11 [ ) ( t T tTe k t udist p + + =gdzie:) (t jest funkcj Diraca PI )11 (s Tkip+)11 ( ) ( tTe k t uist p+ = PD ) 1 ( s T kd p+)] ( 1 [ ) ( t T e k t ud st p + =gdzie:) (t jest funkcj Diraca PID rzeczywisty )111 (++ +Tss Ts Tkdip )11 ( ) (Ttdist peTTtTe k t u+ + = 67 6.4.Regulatory mikroprocesorowe S urzdzeniami programowalnymi o bardzo szerokich moliwociach funkcjonalnych, owieluwejciachiwyjciach,zkilkomablokamiPID,zmoliwociksztatowania wyjciowych sygnaw sterujcych quasi-cigych, dwustawnych (2P) lub trjstawnych (3P). PrzykadowastrukturafunkcjonalnaregulatoramikroprocesorowegoEFTRONIKX pokazana zostaa niej. W strukturze tej mona wyrni 6 warstw, w ktrych znajduj si 22 programowalne bloki funkcjonalne (w wersji 4-wejciowej) nazywane take blokami programowalnymi lub krtko blokami. Oznaczenia:AI wejcia analogowe (Analog Input) DI wejcie dyskretne (Digital Input) AO wyjcie analogowe (Analog Output) DO wyjcie dyskretne (Digital Output) H warto grna (High) L warto dolna (Low) Wejcia blokw w warstwie 1 s bezporednio poczone z wyjciami przetwornikw a/c, a wyjcia blokw w warstwie 5 z wejciami przetwornikw c/a, w zwizku z czym kady wejciowy sygna analogowy musi przechodzi przez warstw 1, a uzyskanie analogowego sygnau wyjciowego musi odbywa si przez warstw 5. Oznaczenia poszczeglnych blokw s dwucyfrowe: pierwsza cyfra oznacza numer warstwy, a druga kolejny numer bloku w danej warstwie. Kady blok moe realizowa jeden z algorytmw, wybrany w trakcie programowania, z biblioteki algorytmw dla danej warstwy. Wewntrz danej struktury funkcjonalnej wszystkie operacje realizowane s na sygnaach cyfrowych, ktrych znormalizowany zakres zmiennoci wynosi 01. 68 PRZYKADY Z BIBLIOTEKIALGORYTMWEF-X 1234 1-1-01 2 3* 4* 5** 6** 7** 8** 0000 ...0127 [s] Tfstaa filtracji (stal czasowa czonu inercyjnego 1-go rzdu nastawiana od 0 do 127 s). 1-1-02 2 3* 4* 5** 6** 7** 8** -999 ... 9999 PV min. Warto minimalna wielkoci mierzonej w jednostkach fizycznych 1-1-03 2 3* 4* 5** 6** 7** 8** -999 ... 9999 PV max. Warto maksymalna wielkoci mierzonej w jednostkach fizycznych 1-1-08 Algorytmy funkcji przetwarzania sygnau: 20000-Y=X; 3*0001-Y = K1*X+K2; 4*0002-Y=K1*(1-X)+K2; 5**0003-Y=K1*SQRT(X)+K2; 6**0004-Y=Kl*X2-fK2; 7**0005-Y=K1*SQRT(X3)+K2; 8**0006- REZERWA; 0007-Y = SQRT(K1*X+K2); 0008-Y = K1*100%; 0009- linearyzacja charakterystyki termorezystora PT100 3-1-05 Kod algorytmu: 20000-.Y- Xl; 30002- Y = K2+(K1*X1+X2)/(K1+1); 40003- Y = K2+(Kl*Xl-X2+2)/(Kl+l); 50004-Y = K1*X1*X2+K2; 60005-Y = K1*X1/X2+K2 X2>X1; 70006- Y = max (X1,X2) wybierak max ; 0007- Y = min (Xl,X2) wybierak min ; 0008- Y=K1*Xl+X2+K2; - Y = K1*X1-X2+K2; 4-1-08 Algorytmy regulacji: 20001-PID- 3*0002- PID RATIO; 4*0003-PID AUTO RATIO; 5**0004-PID AUTO BLAS; 6**0005- P z nastawnym punktem pracy (4 - x - 09); 7**0006-PID DDCCM; 0007-PID DDC CMA; 0008-PID DDCSPC; 0009...0010- REZERWA;69 6.5.Wykorzystanie sterownikw PLC do regulacji Wikszosterownikw,oprczmoliwocirealizacjisterowaniasekwencyjnego,ma takealgorytmyPIDwswejbibliotece,copozwalatworzyukadyautomatykio zrnicowanych zadaniach sterowania, zawierajcych m.in. klasyczne obwody regulacji. 6.6.Regulacja lub sterowanie w trybie soft-control Niektrefirmyproponujjutechniksterowaniapolegajcnarealizacjiwszystkich funkcji regulatora lub sterownika przez komputer. Technikatamajeszczeograniczonyzasig,gdywrozwizaniachprzemysowych najistotniejszajestniezawodnodziaaniaitrzebadysponowaurzdzeniamimogcymi przej sterowanie w przypadku awarii komputera. 70 7.WYMAGANIA STAWIANE UKADOM AUTOMATYKI 7.1.Stabilno A.Definicja i warunki stabilnoci ukadw liniowych (cigych, stacjonarnych) Stabilno jest cech ukadu, polegajc na powracaniu do stanu rwnowagi staej po ustaniu dziaania zakcenia, ktre wytrcio ukad z tego stanu. eyROzu-+-+yw Rysunek 7.1 Schemat zamknitego ukadu regulacji automatycznej: O obiekt regulacji, R - regulator Zamknityukadliniowy(rys7.1)bdziemywicuwaazastabilny,jeeliprzy kadejskoczonejwartocizakceniaz(t)iwartocizadanejw(t)orazdladowolnych warunkwpocztkowychsygnawyjciowyy(t)dybdziedoskoczonejwartoci ustalonejdlaczasut dcegodonieskoczonoci.Niekiedyprecyzujesidodatkowo,e gdypozanikniciezakceniaukadpowracadotegosamegostanurwnowagico zajmowanypoprzednio,wwczasjeststabilnyasymptotycznie.Przykadyprzebiegwy(t) wystpujcych w ukadach stabilnych i niestabilnych pokazano na rys 7.2.Jeeli ukad zamknity opisany jest za pomoc liniowego rwnania rniczkowego z bdtz dbdtz db y adty dadty dammmmmmnnnnnn 0111 0111+ + + = + + +K K ( 7.1) lub odpowiadajcej mu transmitancji operatorowej: ) () () () () (011011s Ns Ma s a s ab s b s bs zs ys Gnnnnmmmm=+ + ++ + += =KK ( 7.2) toczasowyprzebiegsygnauwyjciowegot(y)podowolnymzakceniuowartoci skoczonej opisany jest wzorem o nastpujcej postaci oglnej*): stnkt skz e A A t yk||
\|+ ==10) ( ( 7.3) gdzieskspierwiastkamirwnaniacharakterystycznegoukaduzamknitego(mianownika transmitancji operatorowej rwnego zeru) *) Przy zaoeniu, e rwnanie charakterystyczne nie ma pierwiastkw wielokrotnych ani rwnych zeru. 71 0 ) ( = s N ( 7.4) a zst jest wartoci zakcenia. Zakcenie z(t) moe by wprowadzone w dowolnym miejscu ukadu, w szczeglnoci zakceniem moe by rwnie zmiana wartoci zadanej w(t). yta) b)yt1234123 Rysunek 7.2 Przebiegi przejciowe: a) w ukadach stabilnych, b) w ukadach niestabilnych Koniecznymidostatecznymwarunkiemstabilnociasymptotycznejukadujest,aby pierwiastkirwnaniacharakterystycznegoukaduzamknitegomiayujemneczci rzeczywiste. 0 ) Re( > >a a an n K *) Rwnanie to odpowiada rwnaniu (7.4) 72 b)podwyznaczniki i, od i=2 do i=n-1, wyznacznika gwnego n s wiksze od zera. Wyznacznik n, utworzony ze wspczynnikw rwnania(7.7) ,ma n wierszy i n kolumn: K K K K K KKKKK3 4 5 6 71 2 3 4 51 2 3100 0 0 = n n n n nn n n n nn n n nn na a a a aa a a a aa a a aa a Podwyznaczniki i maj posta: K K ,0,3 4 51 2 3132 312 = = n n nn n nn nn nn na a aa a aa aa aa a Przedstawionopraktycznesformuowaniekryterium.Woryginalnymsformuowaniu Hurtwitzawymagasi,aby wszystkie podwyznaczniki i, tzn. Od i=1 do i=n, byy wiksze od zera. Poniewa jednak zachodzi: 1 0 1 1, = = n n na a zatem w przypadku spenienia warunku a.) sprawdzenie dodatnioci podwyznacznika 1 i wyznacznika gwnego n jest niecelowe. C.Kryterium Michajowa KryteriumMichajowapozwalanawykrelnesprawdzeniestabilnociukaduregulacji automatycznej. Podane zostanie wyprowadzenie tego kryterium. Rwnanie charakterystyczne ukadu zamknitego mona przedstawi w postaci: 0 ) )...( )( ( ) (2 1= =n ns s s s s s a s N ( 7.8) gdzie s1, s2, sn s pierwiastkami tego rwnania. Jakozmiennniezalensmoemywybram.in.zbirpunktwpooonychnaosiliczb urojonych,wwczass=jilewastronarwnaniacharakterystycznegoprzyjmuje nastpujc posta: ) )...( )( ( ) (2 1 n ns j s j s j a j N = ( 7.9) Kadyzczynnikw(jsk)monaprzedstawigraficzniejakornicdwchwektorw, wektora j oraz wektora sk przedstawiajcego k-ty pierwiastek rwnania charakterystycznego. FunkcjN(j),jakofunkcjzmiennejzespolonej,monaprzedstawiwpostaci wykadniczej: je j N j N ) ( ) ( =gdzie: n ns j s j s j a j N = ... ) (2 1 oznacza modu funkcji N(j), natomiast 73 ) arg( ... ) arg( ) arg( ) ( arg2 1 ns j s j s j j N + + + = = ( 7.10) oznaczaargument funkcji N(j). Jeeliprzyjmujemy,espordnpierwiastkwrwnaniacharakterystycznego(n-m) pierwiastkwznajdujesiwlewejppaszczynie,ampierwiastkwwprawej,tozmiana argumentu N(j) przy zmianie od - do + wyniesie: ) ( ) ( arg m n j N = < < ( 7.11) Poniewawarunkiemstabilnocijest,abywszystkiepierwiastkirwnania charakterystycznegomiayujemneczcirzeczywiste,ukadbdziewicstabilny,jeeli 0 = m , tzn. jeeli n j N = < < ) ( arg ( 7.12) Warunektenmonauproci,jeeliwykaemy,eN(j)jestkrzywsymetryczn wzgldemosiliczbrzeczywistych.Podstawiajcwrwnaniu(7.7)s=jzapiszemylew stron w postaci: 0 ) ( ) ( ) ( ) (0 111= + + + + =a j a j a j a j Nnnnn K ( 7.13) Cze rzeczywista i urojona N(j) wynosz: KK+ + =+ + =775533 1664422 0) () ( a a a a Qa a a a P ( 7.14) Oraz ) ( ) ( ) ( jQ P j N + = ,) ( ) ( ) ( jQ P j N = ( 7.15) Wystarczy wic zbada przebieg jednej z gazi krzywej N(j), dla pulsacji zmieniajcej si od 0 do +. KryteriumMichajowamonasformuowaostateczniejaknastpuje:ukadregulacji automatycznejjeststabilnywtedyitylkowtedy,gdyzmianaargumentukrzywejN(j)przy zmianiepulsacjiod0do+wynosin/2,gdzienoznaczastopierwnania charakterystycznego. 2) ( argnj N = < < ( 7.16) Krzyw N(j) nazywa si niekiedy krzyw charakterystyczn lub hodografem Michaowa. 74 jQ()= 0P()n = 2n = 3n = 4a00jQ()= 0P() 201aa= 312aa= n = 1n = 2n = 3n = 4a0a) b) Rysunek 7.3 Krzywe charakterystyczne ukadw: a) stabilnych, b) niestabilnych D.Kryterium Nyquista KryteriumNyquistamadueznaczeniepraktyczne,poniewapozwalabadastabilno ukaduzamknitegonapodstawieprzebiegucharakterystykiczstotliwociowejukadu otwartego, ktr mona wyznaczy zarwno analitycznie, jak i dowiadczalnie. Rozpatrzmy ukad liniowy o schemacie blokowym przedstawionym poniej: G2(s)G1(s)ywu-+y Rysunek 7.4 Schemat blokowy ukadu Transmitancja ukadu otwartego wynosi ) ( ) () () () (2 1s G s Gs ws us GO= = ( 7.17) Przedstawiajc t transmitancj w postaci ilorazu wielomianw zmiennej s otrzymamy: ) () () (s Ns Ms GOOO= ( 7.18) przy czym 0 ) ( = s NO ( 7.19) jest rwnaniem charakterystycznym ukadu otwartego; zakadamy, e stopie tego rwnania rwna si n. Transmitancja ukadu zamknitego wynosi 75 ) ( ) ( 1) () () () (2 11s G s Gs Gs ws ys GZ+= = ( 7.20) Rwnanie charakterystyczne ukadu zamknitego 0 ) ( ) ( ) ( = + = s N s M s NO O Z ( 7.21) jest rwnie stopnia n, poniewa stopie MO(s) nie jest nigdy wikszy od stopnia NO(s). Zbadamy zmian argumentu funkcji ) () () ( 1j Nj Nj GOZO= + ( 7.22) ) ( arg ) ( arg )] ( 1 [ arg0 0 0 j N j N j GO Z O < < < < < < = + ( 7.23) Przypadek1.Ukadotwartyjeststabilny.Rwnaniecharakterystyczneukaduotwartego mawszystkiepierwiastkiwlewejppaszczyniezmiennejs.Zgodniezkryterium Michajowa: 2) ( arg0n j NO= < < Ukad zamknity bdzie stabilny, jeeli 2) ( arg0n j NZ= < < Warunek stabilnoci ukadu zamknitego mona wic zapisa 0 )] ( 1 [ arg0= + < b, 01> b, 02> bczyli: 0 10 1> + + a a0 10> a0 10 1> + a aNa paszczynie parametrw a1, a0 : a0a1-2 -1 1 221-1-2 84 7.2.Dokadno statyczna Dokadno t ocenia si na podstawie wartoci odchyki statycznej est. Na warto est wpywaj zarwno zakcenia z na wejciu obiektu, jak i zmiany wartoci zadanej w na wejciu regulatora. eyROzx-+-+yw st w st z sttste e et e e ) ( lim+ == Wymagandokadnostatycznokrelasipodajcliczbowewartocidopuszczalnych odchyek est, lub oddzielenie ezst i ewst albo procentowe wartoci wskanikw odchyek e1 i e2: 1 % 100 eyenst z ,2 % 100 ewenst w gdzie:yn, wn wartoci nominalne (punkt pracy), niekiedy maksymalne Wyliczenie wartoci odchyek statycznych: ) ( ) ( 1) () ( lim ) ( lim ) ( lim0 0s G s Gs Gs z s s e s t e er obobszsztst z+ = = = ) ( ) ( 1) () ( lim ) ( lim ) ( lim0 0s G s Gs Gs w s s e s t e er obobswswtst w+ = = = Przykad: a.) xykTs+1 obiekt bez regulatora b.) +-xykTs+1ekp ukad z regulatorem P c.) +-xykTs+11Tiskp(1+ ) ukad z regulatorem PI 85 zaoenie: w0=const ,w= 0 zatem: e = y,est = ez st = yst Jeeli stzss z1) ( = , to: a.) ststs sst st zz kTsz ks y s y e =+= = = 1lim ) ( lim0 0 b.) stps sst st zzkTskTsks y s y e +++= = = 111lim ) ( lim0 0 pststk kz ky +=1 c.)011111lim0= |||
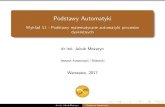
\|++++=stipsstzs TkTskTsky !!! Wpyw akcji P I D regulatora na dokadno statyczn: gdy kp ronie to est maleje (uwaga na stabilno!) obecno akcji cakujcej likwiduje odchyk statyczn (est = 0 dla kadej skoczonej, ustalonej wartoci wymuszenia) obecno akcji rniczkujcej nie ma wpywu na warto est
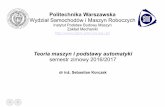
Przykady odpowiedzi skokowych: ukad z regulatorem Pukad z regulatorem PI wya) b)tw(t)y(t)esttw(t)y(t)est=0wywytw(t)y(t) stetw(t)y(t)wyest *Dyskusja: wymuszenia liniowo narastajce i inne. 86 7.3.Jako dynamiczna Mona j oceni za pomoc szeregu wskanikw. 7.3.1.Wskaniki dotyczce cech odpowiedzi skokowej A.Czas regulacji tr Jesttoczasliczonyodchwiliwystpieniazakceniadochwili,poktrejodchyka regulacjiejeststalemniejszaod|e|.Czstoprzyjmujesie=5%em.Podana definicjajestumowna,opartanawynikacheksperymentwiobserwacjizachowania ukadw rzeczywistych. B.Odchyka maksymalna em Jest to najwiksza warto odchyki e(t), czyli rnicy midzy y(t) i w(t), wystpujca podczas przebiegu przejciowego (dla 0 t ) C.Przeregulowanie% 10012 =ee ( 7.35) gdzie:e1,e2amplitudypierwszegoidrugiegoodchyleniaodkocowejwartoci ustalonej Doczstoe1 =em,alezapis% 1002 =mee ,jest poprawnytylko dla przebiegw w ukadachzregulatoremastatycznym(zakcjI),adlapozostaychprzypadkw przedstawionych w tabl. 7.1, oznaczonych (b) i (c), naleaoby napisa: b)% 1002=st me ee c)% 10022=e eem poniewa dla b)em-est=e1 oraz dla c) em-e2=e1, wictylkodefinicja(7.35) ma charakter oglny 87 Komentarz do tablicy odpowiedzi skokowych typowych ukadw regulacji Rozwaany jest ukad regulacji o nastpujcej strukturze: eyRegulatorObiektzu-+-+ywe=y-w Przypadek 1: zakcenie skokowe z (w kierunku dodatnim) na wejciu obiektu,const w=Przebieg odchyki regulacji e jest wwczas identyczny jak przebieg odchyki y wielkociregulowanejyodjejwartocizadanejw.Odchyk y=y-woznacza si czstodlauproszczeniazapisuprzezy,cojestzgodnezoglnkonwencj operowaniatylkoodchykamiodnominalnegopunktupracy.Poziom e=0 oznacza w tym przypadku warto zadan w. Przypadek 2: zakcenie w na wejciu regulatora (zmiana wartoci zadanej!)Peny obraz przebiegu sygnaw y,w oraz e, odpowiadajcy rysunkowi (a) tablicy, przedstawiono poniej: Przyjto,podobniejakwpozostaych przypadkachtejczcitablicy,e wartozadanazmieniasiskokowo wkierunkuujemnym,zamplitud skoku wst Dlarysunku(b)tablicyprzebiegi sygnaw y,w,e przedstawiono obok me e = % 5 ODPOWIEDZI SKOKOWE TYPOWYCH UKADW REGULACJI Rodzaj przebiegu AperiodycznyOscylacyjny Regulator astatyczny Wymuszenie na wejciu obiektu Regulator statyczny Regulator astatyczny Wymuszenie na wejciu regulatora Regulator statyczny 88 7.3.2.Wskaniki czstotliwociowe a)Pasmo przenoszenia definicja:jesttozakresczstotliwoci,wktrymspenioneswymagania dotyczcestosunkuamplitudwyjciadowejcia(moduu)orazprzesunicia fazowego pomidzy wyjciem a wejciem interpretacja na wykresach charakterystyk czstotliwociowych pasmo przenoszenia:0 gr b)Wskanik regulacji (wskanik skutecznoci regulacji) ) regulatora (bez) ( 'm) regulatore (z ) () (j ej ej q = Wymagania:1 ) ( < j q dlazakresuczstotliwocipracyukadu,immniejszajest warto) ( j qtym skuteczniejsze oddziaywanie regulatora 89 7.3.3.Cakowe wskaniki jakoci regulacji Miar jakoci regulacji moe by wielko pola pod krzyw odchyki regulacji. Dy si do minimalizacji tego pola. =01) ( dt t e Ia =01)] ( [ dt t e e Ist b =022) ( dt t e Ia =022)] ( [ dt t e e Ist b lub =03) ( dt t e Idla ukadw czasooptymalnych: =04) ( dt t te I=05) ( dt t e t I90 8.DOBR RODZAJU I NASTAW REGULATORW 8.1.Wybr rodzaju (typu) regulatora Regulatorydwustawne(2P)-obiektystatyczne,2 , 0 T Regulatory cyfrowe o algorytmach specjalnych, np.: minimalnowariancyjne predykcyjne Smitha Najbardziejrozpowszechnionesregulatorycigelubquasi-cige(cyfrowe)o algorytmach P, PI, PID. Przy wyborze jednego z tych algorytmw naley pamita o kilku oglnych zaleceniach: akcjacakujca(np.walgorytmachPI,PID)jestniezbdnadla uzyskaniaodchyekstatycznychbliskichzeru(teoretycznierwnych zeru) akcjarniczkujcajestzalecanawprzypadkuobiektwwyszych rzdw(np.procesytermiczne),gdypozwalanawytworzenie silnegooddziaywaniakorekcyjnegoregulatorajuprzymaych odchykach regulacji regulator PI zapewnia dobr jako regulacji tylko przy zakceniach o maych czstotliwociach regulatorPDzapewniaszerszepasmoregulacjiniregulatorPI, jednakprzyzakceniachwolnozmiennychwartociwskanikw jakoci regulacji s gorsze regulator PID czy zalety obu poprzednich regulatorw WgzaleceE.Kollmana(Regelungstechnik,1992),dlaproceswowasnociach bliskichbezinercyjnym(np.przepyw),inercyjnychIrzdulubcakujcychwaciwes zwykleregulatoryP,PI,niekiedyI,natomiastdlaproceswinercyjnychwyszegorzdu lub cakujcych z inercj (astatycznych) naley wybiera regulatory PD lub PID. 91 8.2.Dobr nastaw regulatora Wyrniasimetodyanalityczneidowiadczalnedoborunastaw,dlaregulatorwSISOi MIMO.Wniniejszympunkcieomwionebdtylkodwiemetodydowiadczalnedla regulatorw o jednym wejciu i jednym wyjciu (SISO) 8.2.1.Metoda Zieglera-Nicholsa Stosowanajestwwczas,gdyregulatoriinneelementyukadusjuzainstalowane,ich funkcjonowanie jest sprawdzone, naley tylko dobra nastawy regulatora. Procedura: a)pozostawi tylko dziaanie P regulatora (wyczy I, D) b)zwikszastopniowokpadoosigniciagranicystabilnoci(oscylacjeostaej amplitudzie) c)zmierzyokresoscylacjiTosc(narejestratorzelubekraniemonitora)izanotowa warto kpkr, przy ktrej wystpiy niegasnce oscylacjed)zalenie od typu regulatora, naley przyj nastawy: dla regulatora P:kp=0,5kpkr dla regulatora PI :kp=0,45kpkr,Ti=0,85Tosc dla regulatora PID :kp=0,6kpkr,Ti=0,5Tosc, Td=0,12Tosc W ukadzie z tak dobranymi nastawami regulatora wystpowa bd przebiegi przejciowe oscylacyjne z przeregulowaniem =20-30%. 8.2.2.Metoda tabelarycznego doboru nastaw po dowiadczalnej identyfikacji obiektu Przyjmuje si, e obiekt identyfikowany by metod odpowiedzi skokowych, na podstawie ktrych wyznaczono nastpujce parametry: - dla obiektw statycznych kob, , T(model: 1) (+=Tske s Gob s ) - dla obiektw astatycznych , T (model: Tse s Gs1) ( =, niekiedy Tske s Gob s = ) ((*)) Znajcte parametry okrela si nastawy regulatora zapewniajce okrelony charakter przebiegwprzejciowychnapodstawiezaczonychtablic.Tablicetepozwalajrwnie wyznaczywartocipodstawowychwskanikwjakociregulacji:czasuregulacjitri odchyki maksymalnej em. (*) przypadek omawiany na wykadzie 92TABLICE DOBORU NASTAW REGULATORW Obiekty statyczneObiekty astatyczne Optymalne nastawy regulatora Wskaniki przebiegu przejciowego Optymalne nastawy regulatora Wskaniki przebiegu przejciowego Rodzaj przebiegu przejciowego Rodzaj regulatora Tk kob r iT dT rt st obmz ke Tkr iT dT rt st obmz ke P0,34,5 TT+ 3 , 0 0,375,52,7 PI0,6 T0,5 0,8 + 8 T+ 1 , 0 0,465,7513,21,9 0% min tr PID0,952,40,45,5 T0,84 0,06+ 0,655,00,239,81,38 P0,76,5 TT+ 7 , 02 , 1 0,77,51,43 PI0,7 T0,3 1+ 12 0,05+0,95T 0,73,0151,62 20% min tr PID1,22,00,47 T0,78 0,05 + 1,12,00,37121,12 PI1,0 T0,35 1+ 16 T9 , 0 03 , 0 + 1,054,3181,44 02) ( min dt t e PID1,41,30,510 T0,7 0,05 + 1,371,60,51151,03 Optymalne nastawy regulatorw PID wedug Chiena, Hronesa i Reswicka, z wyrnieniem miejsca wprowadzenia zakce (dla ukadw z obiektami statycznymi) =0%, minimum tr = 20%, minimum tr ) ( 1 ) ( t z t zst= ) ( 1 ) ( t w t wst= ) ( 1 ) ( t z t zst= ) ( 1 ) ( t w t wst=Rodzaj regulatora Tk iT dT Tk iT dT Tk iT dT Tk iT dT P0,30,30,70,7 PI0,64,00,351,20,72,30,61,0 PID0,952,40,420,61,00,51,22,00,420,951,350,47 r obk k k =93 9.STRUKTURY UKADW REGULACJI Wszystkiestrukturyprzedstawianesprzyzaoeniu,ewasnocizespow wykonawczychiprzetwornikwpomiarowychwczonesdoobiektu.Transmitancja obiektuopisujewicwypadkowewasnocipoczenia:zespwykonawczy+obiekt+ przetwornik pomiarowy. Omwionotylkopodstawowerodzajestrukturzoonych,wprojektachprzemysowych ukadwautomatykispotykasirwnierozwizaniabardziejrozbudowane,stanowice rne poczenia omawianych struktur. 9.1.Uoglniona struktura jednoobwodowa Wstrukturzetej,przedstawionejniej,uwzgldniasifakt,etransmitancjaGx(s), opisujcazwizekpomidzysterowaniemuiwyjciemy,moebyinnanitransmitancja Gz(s), opisujca zwizek pomidzy zakceniem z i wyjciem y (rne tory oddziaywania u i z). Uoglniona struktura jednoobwodowa 9.2.Regulacja kaskadowa Regulacjatajestcelowadlaobiektwwieloinercyjnych,obiektwostaychrozoonych lub obiektw z opnieniem transportowym w czci G2, gdzie reakcja wielkoci wyjciowej y na zakcenie wprowadzane na wejcie obiektu nastpuje ze znacznym opnieniem (cile: nie jest zauwaana przez znaczny czas). Warunkiemutworzeniakaskadowegoukaduregulacjijestistnieniewobiekciemierzalnej pomocniczejwielkociregulowanejyp,ktraszybciejreagujenatozakcenienigwna wielko regulowana y. Struktura oglna kaskadowego ukadu regulacji: G1, G2 - obiekt regulacji R1 - regulator gwny R2 - regulator pomocniczy 94 Przykad: regulacja temperatury y na wyjciu wymiennikaciepa,znateniem przepywuparyjakowielkoci pomocnicz yp Zaletyregulacjikaskadowejwstosunkudojednoobwodowejatwowykazapoprzek-sztaceniuukadukaskadowegodorwnowanegoukadujednoobwodowegozobiektem zmodyfikowanym o transmitancji Gob.m(s) i regulatorem gwnym R1. Struktura rwnowana: Zalety: a)neutralizacja waciwoci dynamicznych czci G1 obiektu transmitancja pierwotna obiektu: Gob(s) = G1(s) G2(s) transmitancja obiektu zmodyfikowanego: ) ( ) ( 1) ( ) () () () () (2 12 12 .s R s Gs R s Gs Gs xs ys Gm ob+= =z czego wynika, e w pamie czstotliwoci, w ktrym1 ) ( ) (2 1>> j R j Gzachodzi ) ( ) (2 . j G j Gm ob95 b)linearyzacja charakterystyki statycznej czci G1 obiektu ) (2x f yp=- pierwotna charakterystyka statyczna ) ( A f yp=- zmodyfikowana charakterystyka statyczna B A x =2, std:B x A + =2 (na rysunku przyjto, e R2 jest regulatorem P o wzmocnieniu kp=4, stdB yp41= ) c)skuteczniejsza kompensacja zakce z1 Zakceniaz1kompensowanes[ ] ) ( ) ( 12 1 j R j G + -krotniesilniejniwukadzie jednoobwodowym z regulatorem R1. 9.3.Regulacja stosunku Strukturaukaduzaleyodwarunkwpracyinstalacjiimoliwocioddziaywaniena wielkoci, ktrych stosunek chcemy utrzyma stay Przykad: Regulacja stosunkukQQ=12, z moliwoci oddziaywania jedynie na Q2. (Uwaga: wpyw zakresw pomiarowych przetwornikwPP1 i PP2 na 12QQ!) 96 9.4.Kaskadowa regulacja stosunku Przykad optymalizacji procesu spalania przez utrzymywanie staej zawartoci O2 w spalinach: 9.5.Ukady z pomocnicz korekcj dynamiczn: a)Struktura pierwotna b)Struktura przeksztacona do rwnowanego ukadu kaskadowego 97 Najczciej: 1) (+=TsTss D )11 ( ) (s Tk s Rip+ =Co odpowiada, dla T=Ti, uyciu w ukadzie kaskadowym regulatora gwnego typu PI: s T S Di11) (1+ =oraz regulatora pomocniczego typu P: pk s D s R = ) ( ) ( 9.6.Ukady zamknito-otwarte W ukadach tych wykorzystuje si bezporedni pomiar zakcenia do wytworzenia oddziaywania kompensujcego wpyw tego zakcenia na wyjcie obiektu Typowe strukturyWarunki cakowitej eliminacji wpywu z na y: a) ) ( ) (1) (1 j G j Rj D = b) ) (1) (1j Gj D =
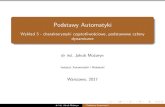
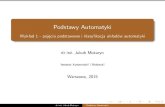
Ograniczenia:a)zwykle zakce jest wiele, cz z nich moe by trudna lub niemoliwa do zmierzenia b)waciwoci obiektu G1 nie s stae w czasie 98 10. WACIWOCI STATYCZNE I STABILNO UKADW NIELINIOWYCH 10.1.Rodzaje elementw nieliniowych. Charakterystyki statyczne. Elementyiukadynielinioweopisywaneszapomocnieliniowychrwna rniczkowych, rnicowych lub algebraicznych. Nie obowizuje ich zasada superpozycji. Ukadem nieliniowym jest kady ukad zawierajcy chocia jeden element nieliniowy. Naprzykad,nielinioweswszystkieukadyzawierajceelementyodziaaniu przekanikowymlubelementy,wktrychuwzgldniamytakiezjawiskajaktarciesuche (Columba), luzy, histereza albo mechaniczne ograniczenia ruchu. Wnajprostszymprzypadku,kiedyelementnieliniowymonatraktowajako bezinercyjny,wasnocielementuszdefiniowaneprzezpodaniejegocharakterystyki statycznej.Podstawowerodzajecharakterystykstatycznychelementwnieliniowych zestawiono na rys. 10.1. Charakterystyki te s zwykle krzywoliniowe, jednak z przyblieniem wystarczajcymdocelwpraktycznychmonaaproksymowajezapomocamanych odcinkw prostych (charakterystyk odcinkami liniowych). Strefanieczuocimoebynp.wynikiemdziaaniaobciezewntrznychostaej wartocilubluzw,nasycenieoznaczaograniczeniamechanicznelubelektryczne (ograniczeniapooenia,cinienia,prduitd.),zjawiskohisterezywystpujewukadach mechanicznychjakoskutekdziaaniatarciasuchego(Columba)iluzwlubjakohistereza sprysta, a w ukadach elektrycznych jako tzw. histereza magnetyczna lub elektryczna. Czstozdarzasi,eelementmajednoczeniedwalubtrzyrodzajenieliniowoci podanychnarysunku10.1.Przykadowecharakterystykistatycznetakichzoonych elementw nieliniowych przedstawiono na rys. 10.2. element ze strefnieczuoscielement z nasyceniemelement z histerez przekanik dwupooeniowyuyuuuyyy Rysunek 10.1. Podstawowe rodzaje charakterystyk statycznych elementw nieliniowych. 99 uprzekanik trjpooeniowyz histerezyprzekanik trjpooeniowyyuyuuelement ze strefnieczuoci, histerez inasyceniemyelement ze strefnieczuoi i nasyceniemyuelement z histerez inasyceniem Rys. 10.2. Charakterystyki statyczne zoonych elementw nieliniowych. Dlazilustrowaniawpywuniektrychszczegwkonstrukcyjnychnanieliniowo charakterystykstatycznychelementw,zbadamyzachowaniesizespourozdzielacz-siownikhydraulicznyoschemaciewedugrys.10.3a.Wrozdzielaczuwystpujetzw. przekrycie,toznaczywysokotoczkwrozdzielaczajestwikszaodwysokocioknaw cylindrzerozdzielacza.Przyoznaczeniachprzyjtychnarysunkurwnaniecharakterystyki statycznej mona zapisa w postaci. 00 =>)`< => =ua u dla y ya u dla y yua u dla y ya u dla y ymmmm&& ( 10.1) Wykres charakterystyki podano na rys. 10.3b. 100 yym-ym0u yu0pspspzaaa) b)yyma - a-ymu Rysunek10.3.Zesprozdzielacz-siownikhydraulicznyzprzekryciemtoczkwrozdzielacza;a) schemat konstrukcyjny, b) charakterystyka statyczna; pz cinienie zasilania, ps cinienie spywu Dwa dalsze przykady elementw z histerez znajduj si na rys 10.4. W pierwszym przypadku histereza spowodowana jest tarciem suchym w prowadnicy trzpienia przesuwanegoprzezmieszeksprysty(siatarciamawartostaFtiznakzaleyod kierunkuzmiancinienia),awdrugimprzypadkuluzamiprzegubiemechanicznym. Rwnanie charakterystyk statycznych mona odpowiednio zapisa: dla elementu wedug 10.4a ||
\| = pAFpcAyt& sgn (10.2) dla elementu wedug rys. 10.4b u a u y & sgn = (10.3) 101 AcpyFta)b)ypFtFtarctg A/cyu-aa450a ayuAA Rysunek10.4.Schematykonstrukcyjneicharakterystykistatyczneelementwzhisterez: a) przypadektarcia suchego; Ft sia tarcia, A- powierzchnia efektywna mieszka, c sztywno zespou mieszek-spryna, b)przypadek luzu Wrwnaniachtychoraznarys.10.4nieuwzgldnionoograniczeprzesuniciay,ktrew rzeczywistocizawszewystpujipowoduj,echarakterystykastatycznazawieradwie nieliniowoci: histerez i nasycenie. Charakterystykistatyczneelementwnieliniowychdzielimynajednoznacznei wieloznaczne. Wieloznaczne s charakterystyki elementw z histerez. Wyznaczenie charakterystyk statycznych ukadw nieliniowych jest najdogodniejsze i najdokadniejszeprzyuyciutechnikcyfrowych,aleczstozewzgldunaatwo postpowania korzysta si take z prostych metod graficznych. Charakterystykstatycznszeregowegopoczeniaelementwwyznaczasitzw. metod czworoboku, ktr zilustrowano na rys. 10.5. 102 u a b yuaybb ab uay Rysunek10.5.Wyznaczeniecharakterystykistatycznejszeregowego poczenia trzech elementw (naley zwrciuwag,echarakterystykiskadowesprzedstawionewewsprzdnychabsolutnych,aniewe wsprzdnych odchyek) Metodatamaznaczenieoglne;moebystosowanadoukadwliniowychi nieliniowych, niezalenie od liczby elementw liniowych lub nieliniowych wystpujcych w poczeniu.Jeelipoczeniezawierawicejnitrzyelementy,wykresczworobokunaley powtarza,traktujczakadymrazemwypadkowcharakterystykpoprzednichelementw jako pierwsz skadow nastpnych. Charakterystyk statyczn rwnolegego poczenia elementw wyznacza si sumujc, zuwzgldnieniemznakw,charakterystykiskadowe.Przykadtakiegopostpowania przedstawiono na rys. 10.6. Rwnie ta metoda ma znaczenie oglne. y2uyy3y1++-uuy1y2y3yuu1y1y3y2(u1)y3(u1)y1(u1)uy2y Rys 10.6. Wyznaczenie charakterystyki statycznej rwnolegego poczenia elementw. 103 Wyznaczenie charakterystyki statycznej ukadu zamknitego (ze sprzeniem zwrotnym) jest bardziej zoone. Opis stosowanej metody graficznej podano w podrczniku [1]. 10.2. Stabilno ukadw nieliniowych. 10.2.1. Rodzaje stabilnoci ukadw nieliniowych Definicjastabilnocipodanadlaukadwliniowychniejestwystarczajcadla ukadwnieliniowych,ktrychzachowaniemoe zalee od rodzaju i wielkoci zakcenia, mog wystpowa stany staych drga itd. PodstawowadefinicjasformuowanaprzezLapunowadotyczystabilnocipunktu rwnowagiukaduiopierasinapojciuprzestrzenistanw(przestrzenifazowej). Przyjmijmy, e wsprzdne punktu rwnowagi X0 zostay sprowadzone do pocztku ukadu wsprzdnych, tzn. x1 = 0, x2 = 0, ..., xn = 0 . Przy staych wejciach (U = const) ukad opisany jest za pomoc rwna stanu o postaci )`===), ,..., , (.... .......... .......... ..........), ,..., , (), ,..., , (2 12 1 222 1 11n nnnnx x x fdtdxx x x fdtdxx x x fdtdx (10.4) gdzie x1,x2, ...,xn s skadowymi wektora stanu X. Zamyteraz,eukadzostawjakikolwieksposbwytrconyzestanurwnowagi X0iznalazsiwstaniepocztkowymXp,nalecymdopewnegoobszaruwarunkw pocztkowych, zawierajcego rwnie stan Xo. x1x2X0Xp Rysunek 10.7. Ilustracja pojcia stabilnoci wedug Lapunowa. Punkt rwnowagi nazywa si stabilnym, jeeli dla kadego, dowolnie maego obszaru odchyleodstanurwnowagimonadobratakiobszarwarunkwpocztkowych,e caatrajektoriastartujcazobszarubdziezawartawewntrzobszaru.Jeelidla uproszczenia ograniczymy liczb wsprzdnych stanu do dwch, to podan definicj mona zilustrowa graficznie wedug rys. 10.7. 104 Jeeli dodatkowo speniony jest warunek , ) (0 t dla X t Xto dany punkt nazywa si stabilnym asymptotycznie. DefinicjaLapunowadotyczystabilnociukaduwmaymotoczeniupunktu rwnowagi. Taka stabilno nazywa si lokaln, natomiast stabilno punktu rwnowagi przy dowolnieduychwarunkachpocztkowychnazywasiglobaln.Niekiedypodajesi pogldowilustracjetychrodzajwstabilnocizapomocmodelimechanicznych przedstawionych na rys. 10.8. x x x 0 x1x20 0a) b) c) Rysunek10.8.Rodzajestabilnoci;a)niestabilnypunktrwnowagi,b)stabilnolokalna,c)stabilno globalna. Punktrwnowagix=0narys.10.8ajestniestabilnympunktemrwnowagi,gdydowolnie maewytrcenieukaduztegopunktu(stanu)powoduje,eukadniewrcidoniego. Rysunek10.8bilustrujestabilnolokaln(dlawarunkwpocztkowychx2 dt , wic: 0 > dydla0 > y&0 < dy dla0 < y&107 yy.0 = t0 = t0 = t 2.Trajektorie przecinaj oy pod ktem prostym||
\|= = 0 ydtdy& . 3.Przezjedenpunktpaszczyznyfazowej) , ( y y & moeprzechodzitylkojednakrzywa cakowa) ( y f y = & .Wyjtekstanowitzw.punktyosobliwe,wktrychjednoczenie 0 , 0 ) , ( = = y y y P & & . Wwczas: 00=dyy d& (tangens nachylenia stycznej do krzywej cakowej jest nieoznaczony) 4.Rwnanie(11.4)jestpodstawtzw.metodyizoklin(izoklinajestkrzywczc punkty o jednakowym nachyleniu stycznych do trajektorii fazowej) ) , ( y ytgdyy d&& =Rwnanie izoklin: C constyy y Ptg = = =&&) , (ZmieniajcwartoC,tzn.kt ,otrzymamysiatkizoklinpozwalajcwykreli przebieg krzywych cakowych i wyznaczy tzw. portret fazowy. 5.Punktyosobliwereprezentujpunkty(stany)rwnowagiukadu.Wukadach liniowych:) , ( ) , ( const b a y b ay y y P = + = & & wicistniejetylkojedenpunkt rwnowagi:0 , 0 = = y y & .Wukadachnieliniowychpunktwrwnowagijesttyle, ilepierwiastkwrwnania0 ) , (0== yy y P&& .Przykadypunktwosobliwych:ognisko, wze, siodo, rodek 108 Rysunek11.2.Punktyosobliwe0 , 0 = = y y & :a)ogniskostabilne,b)ogniskoniestabilne,c)wze stabilny, d) wze niestabilny, e) siodo, f) rodek 6.Prdko na trajektorii fazowej w punkcie) , ( y y & yy.NM 7.Cykle graniczne przykady przedstawiono rysunku poniej Skadowe prdkoci MN V V Vydty dVydtdyVy yyy= + == == =2 2&&& &&& 109 Rysunek 11.3. Przykady cykli granicznych. 8.Czas przejcia odcinka AB trajektorii fazowej yy.ABAByAyB Metody wyznaczania trajektorii fazowych: a)analityczna (cakowanie bezporednie) ' '1B Ayyyydyt ydtdyBA== =&&&110 b)metoda izoklin c)metoda Lienarda d)inne Przykad1.Rozwamyzamknityukadsterowaniaoschemacieblokowympodanymna rysunku11.4.Sygnaemwyjciowymukadujestktobrotuwausilnika,ktrypowinien nada za sygnaem wejciowym . wzmacniacz silnik+- A Rysunek 11.4. Schemat blokowy badanego ukadu nadnego (serwomechanizmu). Przyjmijmy,ewzmacniaczjestelementembezinercyjnymowspczynniku proporcjonalnociA,natomiastsilnikmamomentbezwadnociIoraztarciesuche,ktrego momentmawartobezwzgldnKiznakzaleyodznakuprdkociktowej. Charakterystyk tarcia suchego pokazano na rysunku 11.5. M+K-K& Rysunek 11.5. Charakterystyka tarcia suchego. Moment tarcia suchego &sgn K M =. Rwnanie momentu silnika & & &sgn K I A + = . (11.5) W spoczynku, tzn. dla t < 0, 0 , 0 = = a . (11.6) W chwili t = 0 wprowadzamy wymuszenie skokowe ) ( 1 ) (0t a t a = . (11.7) Korzystajc z rwnania wza sumacyjnego = (11.8) moemy wyeliminowa z rwnania (11.5) zmienn i wprowadzi tylko ktowe odchylenie sterowania . Dla t > 0 00 00< == => =&&&dla K Mdla Mdla K M111 . , 0, , 0, ,0 0 & && & & &&& = = = = = = Otrzymamy zatem ) sgn( & & & + = K I A . (11.9) Poniewa & & sgn ) sgn( K K = , (11.10) po uporzdkowaniu otrzymamy wic rwnanie 0 sgn = + + A K I & & & . (11.11) Rwnanietomonarozwikawzgldemdrugiejpochodnejdt d / & & & = iprzedstawiw postaci kanonicznej (11.3): ,, sgn &&&=((
+ =dtdIAIKdtd (11.12) std &&&((
+ =IAIKddsgn. (11.13) Wprowadmy do rwnania (11.13) wartoci liczbowe ; 1 , 2 = =IAIK otrzymamy && & sgn 2 + =dd. (11.14) Zbadamy teraz przebieg trajektorii fazowych w grnej ppaszczynie paszczyzny fazowej, tzn. dla0 > & . Wwczas 1 sgn + = &oraz && 2 + =dd. (11.15) Stosujemymetodizoklin.Wybieramywartociconst d d = / & odpowiadajcetypowym ktom nachylenia stycznych 112 ,... 90 , 60 , 45 , 30 , 00 0 0 0 0= Wtedy ,... , 3 , 1 ,31, 0 = = tgdd & Wyznaczymy najpierw rwnanie izokliny odpowiadajce0 / = d d & &20+ = , zatem 2 = . Jesttorwnanieprostejrwnolegejdoosi& ,przechodzcejprzezpunkt2 = .Prostt wykrelononarys.11.6.Zaznaczymynaniejkrtkieodcinki) 0 ( 0 /0= = d d & ,w dowolnych odstpach. Rysunek 11.6. Portret fazowy badanego ukadu. Nastpnie wyznaczamy rwnanie izoklin dla) 45 ( 1 /0= = d d & . &21+ =Po uporzdkowaniu otrzymujemy 2 = & . Jesttorwnanieprostejnachylonejpodktem1350wzgldemdodatniegokierunku osi , przechodzcej przez punkt) 2 , 0 ( = = & . Na tej prostej zaznaczymy krtkie odcinki o nachyleniu) 45 ( 1 /0= = d d & . Analogiczniepostpujcwyznaczymydalszeizokliny.Wszystkieonesprostymi wychodzcymizpunktu) 2 , 0 ( = = & ,akrtkieodcinkipokazujcenachyleniestycznych do trajektorii fazowych s prostopade do poszczeglnych izoklin. W dolnej ppaszczynie , tzn. dla0 < & , mamy1 sgn = & . 113 Rwnanie (11.14) przyjmuje obecnie posta && 2 =dd. (11.16) Wprzypadkuizoklinysprostymiwychodzcymizpunktu) 2 , 0 ( = = & ,anachylenie stycznych jest rwnie prostopade do izoklin. Wykrelonanarys.11.6.rodzinaizoklinpozwalanarysowaportretfazowyukadu. Poszczeglneodcinkitrajektoriifazowychspokrgami,przyczymdlapokrgw lecychwdolnejppaszczyniewpunkcie ) 2 , 0 ( = = & ,adlapokrgwlezcychw grnejppaszczyniewpunkcie) 2 , 0 ( = = & .Pokazanodwietrajektoriefazowe, narysowane dla warunkw pocztkowych . 0 , 0 , 0, 8 , 0 , 8 ), 0 , 0 , 0, 11 , 0 , 11 )0 0 0 0 00 0 0 0 00 0 0 0 00 0 0 0 0= = = == = = == = = == = = = && &&&&& &&&ba Wprzypadkua)trajektoriafazowaskadasiztrzechpokrgwikoczysiw punkcie) 1 , 0 ( = =k k & . W przypadku b trajektoria skada si z dwch pokrgw i koczy si w punkcie) 0 , 0 ( = =k k & . Ze wzgldu na obecno tarcia suchego, odchylenie kocowe k moe zawiera si w obszarze 2 2 k . Jesttoobszarniezgodnocikocowychpooektowychwyjciaiwejcia.Tylkow przypadkuszczeglnym,np.przywarunkachpocztkowychb),odchyleniekocowejest zero, tzn. 0 = =k k. Przykad 2. Metoda cakowania bezporedniego. Przykad zastosowania tej metody dotyczy tego samego ukadu, ktry analizowany by w przykadzie 1, o rwnaniu && & sgn 2 + =dd a)0 < &&& 2 + =dd 21 12 212 22 24 ) 2 (422 22R CCCd d d= + = += ++ + =+ = &&&& (pokrg o rodku2 , 0 = = & ) 114 8 6 2 4 WP-2 -4R1=8R2=4& Rysunek 11.7. Krzywe cakowe (pokrgi) wyznaczone metod cakowania bezporedniego. Dla warunkw pocztkowych10 , 0 = = & 8) 2 10 ( 01212 2== +RR b)0 > &&& 2 + =dd 444 ) 2 (1 21 222 22 2 == += + = + +R RR RR C & Oglnie41 =+ i iR R (dla kadego Ri > 4) Przykad3.MetodaLinarda.Wrdwieluopracowanychmetodwyznaczaniatrajektorii fazowychdoczciejstosowanychnaleoprczomwionejmetodyizoklinmetoda Linardaimetodabezporedniegocakowaniarwnarniczkowychkrzywychcakowych (w tych obszarach, w ktrych rwnania te s liniowe). Metod Linarda przedstawimy na przykadzie wyznaczania trajektorii fazowej ukadu nieliniowego opisanego rwnaniem typu 022= + ||
\|+ ydtdyfdty d. (11.17) Rwnanie to przedstawimy w postaci y y fdty dydtdy = = ) ( , &&& . (11.18) Dzielc stronami rwnanie (11.18) eliminujemy czas t i otrzymujemy rwnanie rniczkowe krzywych cakowych 115 yy y fdyy d&& & + =) (. (11.19) Punkt osobliwy ma wsprzdne0 ) 0 ( = = y i f y & . Trajektorifazowprzechodzcprzezpunkt) , (0 0y y & wyznaczasinapodstawie konstrukcji graficznej przedstawionej na rysunku 11.8. Na paszczynie fazowej wykrela si krzyw) ( y f y & = . Z punktu pocztkowego) , (0 0y y P & prowadzi si prost rwnoleg do Rysunek 11.8. Ilustracja metody Linarda :a)przykadowy wykres krzywej) ( y f & , b) konstrukcja graficzna. osiodcitych,przecinajckrzyw) ( y f y & = wpunkcieA.Ztegopunktuprowadzisi prostrwnolegdoosirzdnychiotrzymujesipunktB.ProstopadadoodcinkaBP wyznaczakierunektrajektoriifazowejwpunkcieP.Dowdtejkonstrukcjiwynika bezporednio z rysunku, 0 0,00 00 0 0) (), ( ,y y y ydyy dyy f yABAPy f y Ac CP AP y AB& &&&&& &= = =+=+ = = = oraz 1 = 2. Naotrzymanymodcinku,wyznaczajcymkierunektrajektoriifazowejwpunkcie) , (0 0y y & , obieramypunkt) , (1 1y y & ipowtarzamykonstrukcj,wyznaczajckierunektrajektoriiwtym punkcieitd.Wykrelamywtensposbtrajektorifazowwpostaciliniiamanej(niekiedy mona odcinki proste zastpi ukami, zakrelanymi z punktw B, B1 itd.). Jakowiczeniezalecasiwyznaczenietmetodtrajektoriifazowychukadu rozwaanego w przykadzie 1. 12. METODA FUNKCJI OPISUJCEJ 12.1. Pojcie funkcji opisujcej 116 Metoda funkcji opisujcej, zwana rwnie metod pierwszej harmonicznej lub metod linearyzacji harmonicznej, stanowi prb rozszerzenia metod czstotliwociowych na przypadek elementw i ukadw nieliniowych. Welementachliniowychwymuszeniesinusoidalnenawejciupowodowao,po zanikniciu przebiegu przejciowego, odpowied sinusoidaln na wyjciu. Welementachnieliniowychwymuszeniesinusoidalnepowodujewstanieustalonym odpowiedperiodyczn(okresow),aleniesinusoidaln.Narysunku12.1pokazano przykadowoprzebiegsygnauwyjciowegodlaprzekanikatrjpooeniowego.atwo spostrzec, e ksztat sygnau wyjciowego zaley nie tylko od rodzaju nieliniowoci, lecz Rysunek 12.1. Przejcie sygnau sinusoidalnego przez przekanik trjpooeniowy. rwnieodamplitudyA1sygnauwejciowego(np.dlaA1 .WpunkcieMpowstajstabilnedrganiao amplitudzieA1MipulsacjiM.WartociA1Modczytujemyzwykresukrytycznego, skalowanego w jednostkach amplitudy A1, a warto M z charakterystyki G(j), skalowanej wjednostkachpulsacji. Drganiasstabilne,gdydla MA A1 1> ukadzachowujesijak stabilny,tzn.amplitudajegodrgamaleje,natomiastdla MA A a1 1< ukadzachowujesi jakniestabilny[taczwykresukrytycznegojestokronaprzezcharakterystykG(j)], tzn.amplitudajegodrgaronie.Punkt(-,j0)wykresukrytycznego,odpowiadajcy amplitudoma A ,natomiastniestabilnydla M NA A A1 1 1< .PunktNjestniestabilnympunktem rwnowagi ( cykl graniczny niestabilny), gdy drgania (A1N, N)gasn, jeeli NA A1 1< , lub 124 ukadsiwzbudza,jeeli NA A1 1> .PunktMreprezentujedrganiastabilne(cyklgraniczny stabilny A1N, N), podobnie jak w przykadzie pokazanym na rys 12.5b. Przykad 1 Zbada stabilno ukadu przedstawionego na poniszym rysunku. y e w +-xym4) 1 (1+ Ts-ymNL Rwnanie funkcji opisujcej elementu N jest nastpujce: 11 14) ( ) (AyA B A Jm= = . WzajemneusytuowaniecharakterystykiG(j)iwykresukrytycznegoK(A1)przedstawiono poniej: 1MJmReA1=0) ( j G 1AK(A1)-0,25 = 0 = UkadczwartegorzduotransmitancjiwidmowejG(j)maprzesuniciefazowe 0180 ) ( = przypulsacji TM1= (elementpierwszegorzduotransmitancji 11+ Tsma przesuniciefazowe 045 przypulsacji M ,wicczterytakieelementypoczone szeregowomaj 0180 ) ( = ).ModucharakterystykiG(j)mawtympunkciewarto: dB MN12 ) ( log 20 = 25 , 0 ) ( =NM W punkcie M wykres krytyczny K(A1M) = - 0,25, a zatem, zgodnie z (12.16): 25 , 04) (11 = =MMMyAA K mMyA =1 Wukadziepowstandrganiasamowzbudne(cyklgraniczny)oamplitudzie mMyA =1i pulsacji TM1= . 125 Przykad 2 (do samodzielnego rozwizania) Dla jakiej wartoci a przedstawiony ukad bdzie stabilny globalnie? y e w +-xym3) 1 (10+ Ts-yma -a DlauatwieniarozwizanianiejprzedstawionoszkicwzajemnegousytuowaniaG(j)i K(A1). 10JmRe) ( j G 1AK(A1) = 0 = A1=aA1 a . s Tym102==126 13. REGULACJA DWUPOOENIOWA W ukadach regulacji dwupooeniowej ( dwustawnej ) zadania regulatora spenia przekanik dwupooeniowy, a oglna struktura ukadu ma posta wg. rys. 13.1. xyeObiektPP(ym=y0 )-+ymzxnexny0a -aB1B2xnee=0+- Rysunek 13.1. Schemat blokowy typowego ukadu regulacji dwupooeniowej. PP- przetwornik pomiarowy. Analiza ukadu przeprowadzona bdzie dla transmitancji zespou OBIEKT + PP: 1) (0+=Tske s GsT oraz dla 02= B 127 T0T0TT0yminymaxy0+ay0-ayry0yutat2t1ttymy T0t2t1ToscT0yu=kB1B1xnyp Rysunek 13.2. Przebieg w ukadzie wg rys. 13.1, po uruchomieniu ukadu od stanu pocztkowego yp
(dla t=0) Od chwili py y =doa y y + =0 a y e y y y yTT tp u pa+ =|||
\| + =001 ) ( . Zaoenie:0 =pyi umy y =0, gdzie 1 0 < < m|||
\| = +TT tu uae y a my01 , std a m yyT T tuua + =) 1 (ln0. Wielko y jeszcze dalej wzrasta przez okres czasu opnienia T0 osigajc ymax a my e a m y a my e a y y yuTTu uTTu+ +|||
\| = + +|||
\| = 0 01 ] ) 1 ( [ 1 ) (0 max. (13.1) Nastpnie temperatura spada do ymin (przez czas t2) 128 TTuTtuTtTTuTte a my e a my e e a m y e y y0 2 2 0 2) ( ) ( 1 ] ) 1 ( [max min = + +|||
\| = = . (13.2) Nastpnie temperatura ronie do ymax (przez czas t1) Ttu uTtue y y y y e y y y1 1) ( 1 ) (min min min max = +|||
\| = . (13.3) Na podstawie (13.1) i (13.3) wyznaczymy t1: a m ye a my yT T tuTTu u + =) 1 () (ln00 1 (13.4) Na podstawie (13.2) wyznaczymy t2: a mye a m y yT T tuTTu u + =0] ) 1 ( [ln0 2. (13.5) Z zalenoci (13.4) i (13.5) wynika, e dla m = 0,5 tzn u py y 5 , 0 = , czas t1 = t2 , natomiast 2 1t t Tosc+ = , jest wwczas najkrtszy. rednia warto oscylacji ustalonych ( )((
+ =|||
\| + =+= 5 , 0 5 , 0 12 20 0 0min max TTuTTu TTu re m y eye myy yy . (13.6) rednia odchyka (uchyb) regulacji: |||
\| = =TTu r re y m y y e01 ) 5 , 0 (0 (13.7) Wnioski: ) ! ( 5 , 0 00tylko y y dla eu r= = nie er zaleyoda! Amplituda podwojona oscylacji ustalonych: TTTTuae e y y y y0 02 1min max +|||
\| = = . Inne przypadki szczeglne: P1.sks G = ) ( ,B1 0,B2 0. t1t2ttTosce+a-axnB10129 a y eB B kaTkBatkBatosc21 1 22,22 1 12211= = |||
\|+ == = P2.ske s GsT0) (= ,B1 0,B2 0. t2t1tToscea-axnB1-B20Toy1y2 Rysunek 13.4. Przebiegi sygnaw odchyki e i sterujcego xn dla ukadu wg P2. 2 12 210 21 120 12121t t TkBaBBT tkBaBBT tosc+ =+|||
\|+ =+|||
\|+ = 0 2 20 1 1T kB a yT kB a y =+ = ) ( 22 1 0 2 1B B kT a y y y e + + = = = P3. 1) (+=Tsks G ,B1 0,B2 = 0. 130 Dla 1 07 , 0 kB y =: 2 11121117 , 07 , 0ln3 , 03 , 0lnt t Ta kBa kBT ta kBa kBT tosc+ =)`+=+= a y e 2 = = P4. 1) (0+=Tske s GsT,B1 0,B2 = 0. Dla 1 05 , 0 kB y = : a kBe a kB kBT T t tTT + = =11 10 2 15 , 0) 5 , 0 (ln0 (((
+|||
\| = = TTTTae e kB y e0 01 5 , 0 21 Korekcja ukadw regulacji dwupooeniowej Omwione zostan dwie podstawowe metody korekcji. 1.Przez podzia mocy elementu wykonawczego. Moc B1 sygnau we obiektu dzieli si na dwie czci ' '1'1 1B B B + = : '1Bjest wczona stale, ' '1Bjest zaczana i wyczana przez regulator. Ten sposb korekcji jest moliwy, gdy '1 1 0kB y y = > yminy'minymaxT0T0T0y0+ay0-ay1=kB1yu=kB112ty Rysunek 13.4.Porwnanie przebiegw y(t) w ukadach 1 - bez podziau mocy, 2 z podziaem mocy. 2.Korekcja przez wewntrzne sprzenie zwrotne (Cel: zwikszenie czstotliwoci przecze, a wic zmniejszenie amplitudy oscylacji) 131 xey0-+ w111+ s Tk+-yxw hxey0-+w111+ s Tk+-yxw hv1v122+ s Tk+-v1v2a) b) Rysunek 13.5. Przykady korekcji przez objcie regulatora przekanikowego ptl wewntrznego sprzenia zwrotnego. Wykaemy, e regulator o schemacie b) ma wasnoci zblione do PID, w sensie wartoci rednich. Zaoenia: B1 = xmax = 1 B1 = xmin = 0 k1 = k2 = k T2 > T1 Przebieg sygnau wyjciowego regulatora pokazano na rys. 13.6. tat0T1tbx Rysunek 13.6. Dla powolnych zmian e, przy de/dt > 0 dtdedtv dhtdtdedtv dhtbbaa== ,gdzie: h = 2a oznacza szeroko ptli histerezy, dtv d a,dtv d b - rednie prdkoci narastania i opadania sygnau v w przedziaach czasu ta i tb dtv ddtv ddtv ddtv ddtv ddtv d b b b a a a 2 1 2 1; = = przy czym: 132 22 222 211 111 1Tvdtv dTv kdtv dTvdtv dTv kdtv db ab a Ostatecznie: )`+==dtdeT Tv T v ThtdtdeT Tv T v TT TT T khtba2 121122 121122 11 2) ( (13.8) rednia warto sygnau wyjciowego x regulatora b aat ttx+=( )((
++ ++ +=2 111221 22 12 11 22 11T Tv T v Tv vdtdeT TT TT TT Tkx . Poniewa: = Tdt v v T v Tv v v011221 2 v e = ( dla powolnych zmian e ) |||
\|+ + =dtdeT edtTe k xdip1 1 22 11T TT Tkkp+=2 1T T Ti+ =2 12 1T TT TTd+= . Dla regulatora o schemacie a) otrzymany wynik wskazujcy na wasnoci zblione do PD ( w sensie wartoci rednich): ||
\|+ =dtdeT e k xi p Czstotliwo oscylacji sygnau wyjciowego regulatora: d p b aT hkx xt tf) 1 ( 1 =+=dla 21= x: d pT hkf41max=Po dobraniu nastawfmona zmienia tylko przez h! 133 14. REGULACJA TRJPOOENIOWA 14.1. Struktura podstawowa. W ukadach regulacji trjpooeniowej, nazywanej te regulacj trjstawn (krtko :3P), zadaniaregulatoraspeniaprzekaniktrjpooeniowy,ktregocharakterystyki przedstawiono na rys. 14.1. a-axhe=y-y0 e=y-y0a-ax1-1 -11ha) b) Rysunek 14.1. Charakterystyki statyczne regulatorw trjpooeniowych: a)idealnego, b) z histerez. Istotneznaczenieregulatorwtrjpooeniowychpoleganamoliwocisterowania przez nie zespow wykonawczych zaopatrzonych w silniki nawrotne. Trzy stany na wyjciu regulatora(umownie+1,0,-1)odpowiadajwwczasruchowisilnikawykonawczegow jednymkierunku,spoczynkowiiruchowiwdrugimkierunku.Przyjmujc,esilnikjest elementemcakujcymotransmitancjik/s,otrzymamywtymprzypadkuschematblokowy ukadu o postaci pokazanej na rysunku 14.2. obiektksz +-xx-aaee+- y0y Rysunek 14.2. Schemat blokowy prostego ukadu z regulatorem trjpooeniowym idealnym; z zakcenia. Regulatortrjpooeniowyrozpatrywanyczniezsilnikiemwykonawczym,ktryjest elementemcakujcym,mawasnocipodstawowezblionedoregulatoraI.Dzikitemu odchylenie statyczne w ukadzie regulacji trjpooeniowej moe by bliskie zera, czego nie mona otrzyma w ukadzie regulacji dwupooeniowej. Zbadamy wasnoci ukadu przedstawionego na rys. 14.2 dla prostego przypadku, kiedy obiekt ma wasnoci elementu inercyjnego pierwszego rzdu 134 1) (11+=s Tks Gob. (14.1) Zakadajc, e dziaajce na ukad wymuszenia zewntrzne maj warto sta, tzn. z = const i y0 = const, otrzymamy na podstawie schematu blokowego nastpujce zwizki: x kkdtdedte dT1 221 = + , (14.2) )`> +< < = =). ( 1), ( | | 0), ( 1) (III a e dlaII a e dlaI a e dlae f x (14.3) Analizwasnociukadunajatwiejprzeprowadzimetodpaszczyznyfazowej.Z rwnaniaprzekanikatrjpooeniowegowynika,enapaszczynienaleywydzielitrzy obszary,wktrychposzczeglneodcinkitrajektoriifazowej(krzywecakowe)mona wyznaczywdrodzebezporedniegocakowaniarwnania14.2,wstawiajckadorazowo odpowiedniwarto) (e f x = wedugrwnania14.3.GraniceobszarwI,II,IIIstanowi proste przecze, e = a oraz e = a. W obszarach I i III rwnanie (14.2) przyjmuje posta 1 221kkdtdedte dT = + , (14.4) ktrej odpowiada e Tkk edee d&& &11 = . (14.5) Po scakowaniu otrzymamy C e T kk e T kk e + = & &1 1 1 1| | , (14.6) gdzie C jest sta okrelon warunkami pocztkowymi. ekk1-kk1IIIIIIa-aee0. Rysunek 14.3. Portret fazowy ukadu przedstawionego na rysunku 14.2 w przypadku obiektu inercyjnego pierwszego rzdu. 135 W obszarze II rwnanie (14.2) przyjmuje posta 0221= +dtdedte dT , (14.7) a po scakowaniu otrzymamy rodzin prostych 010eTe ee & & + = , (14.8) gdzie 0ei 0e&oznaczaj wartoci pocztkowe. Odcinki trajektorii fazowych odpowiadajce (14.6) i (14.8) oraz przykadow trajektori fazow ukadu przedstawiono na rys. 14.3. Jeeliuwzgldniamyhisterezhprzekanikatrjpooeniowegoischematblokowy ukaduprzyjmujepostaprzedstawionnarysunku14.4a,toliniamiprzeczebd pproste: w I wiartce paszczyznye = a + h, w II wiartce paszczyznye = a, w III wiartce paszczyznye = -a - h, w IV wiartce paszczyznye = -a. Rwnaniakrzywychcakowychwposzczeglnychobszarachwyznaczonychliniami przecze okrelone s wzorami (14.6) i (14.8), a przykadowy przebieg trajektorii pokazano narys.14.4b.Napodstawietegoprzebiegumonaoceniniekorzystnywpywhisterezyna stabilno ukadu. kksz +-xx-aaee+- y0T1s+1}}hha)b)ekk1-kk1III IIIa-aee0.IV{hh { Rysunek 14.4. Schemat blokowy (a) i przykadowa trajektoria fazowa (b) ukadu z regulatorem trjpooeniowym z histerez. Zastosowanieopisanychwyejprostychregulatorwtrjpooeniowych,bez dodatkowychczonwkorekcyjnych,rzadkodajezadowalajcerezultaty.Inercja rzeczywistego obiektu jest na og tak dua w stosunku do prdkoci silnika wykonawczego, eukadmoebystabilnytylkoprzybardzoduejstrefienieczuociregulatora,co prowadzidozmniejszeniadokadnocistatycznej.Poprawwasnocidynamicznychukadu monauzyskaprzezwprowadzanienawejcieprzekanikadodatkowopochodnej odchyleniaregulacjie,lubprzezobjcieprzekanikaptlsprzenia zwrotnego, w wyniku czego otrzymuj si tzw. regulator krokowy. 136 14.2. Regulatory krokowe. Zasaddziaaniaregulatorakrokowegomonawyjaninapodstawieschematu blokowegoprzedstawionegonarys.14.5.dzikiobjciuprzekanikatrjpooeniowego dynamicznym sprzeniem zwrotnym o transmitancji Gz(s), na jego wyjciu pojawia si cig impulsw x1 powodujcy poruszanie si silnika wykonawczego krokami. Wasnociregulatorwkrokowychmonaanalizowapodobniejakregulatorw dwupooeniowychzkorekcj.Jeelizmianyodchyleniaregulacjiespowolne,todla urednionych wartoci sygnau nastawiajcego x obowizuje zaleno s T s G s es xm z1) (1) () ( . (14.9) 1 e1+-x1x1e1eTmsGz(s)x Rysunek 14.5. Schemat blokowy regulatora krokowego. Regulator krokowy moe wic mie wasnoci zblione do PI, jeeli Gz(s)=k/(Tis + 1). Wwczas |||
\|+ =+s T kTTs T ks Ts es xi mimi111 1) () (. (14.10) Umieszczajc w gazi sprzenia zwrotnego element o transmitancji Gz(s)=k/(TiTds2+Tis+ 1) otrzymamy regulator o wasnociach zblionych do PID |||
\|+ + =+ + s Ts T kTTs T ks T s T Ts es xdi mimi i d111 1) () (2. (14.11) Dziaanie PID mona rwnie uzyska stosujc zamiast elementu inercyjnego drugiego rzdu dwa elementy inercyjne pierwszego rzdu, poczone wedug schematu blokowego przedstawionego na rys 14.6. Parametry konstrukcyjne regulatora s tak dobrane, e zachodzi 2 1k k > , . ,2 1 2 1 b b a aT T T T > >Jeeli zmiany e s powolne, to transmitancja regulatora jest w przyblieniu rwna |||||
\|++ + 111) () (skTs Ts Tks es xdddip. (14.12) 137 1 e1+-x1x1e1eTmsx+-tk1k2T1aT2atT1bT2b Rysunek 14.6. Schemat blokowy regulatora krokowego PID. gdzie mapT kTk11= , b iT T1= , 2 1212122,11k kkkTTkkT Tdbbb d== . Podane wyej zalenoci pokazuj, za pomoc jakich parametrw realizowa mona zmiany nastaw regulatora. 138 15. ANALIZAPRZEKANIKOWYCHUKADWSTEROWANIA METOD GRAFICZN. Rozwamy pocztkowo ukad z przekanikiem idealnym (rys. 15.1) N Lye+-w-M+Mw Rysunek 15.1. w(t) = M1(t) 2M1(t t1) + 2M1(t t2) =M1(t) +nkM1) 1 ( 2 1(t tk) + =nkkt t q M t Mq t y1) ( ) 1 ( 2 ) ( ) (gdzie:1(t) - skok jednostkowy q(t) - odpowied na skok jednostkowy Zaoenia: 1.System znajduje si pocztkowo w stanie spoczynku 2.e(t) > 0 ttwM-M0t1t2t3t4t5t6t7t8t1t2t3t4t5t7t9e(t)y(t)q(t)M 2q(t)M-2q(t)Me y Rysunek 15.2. Wyznaczanie odpowiedzi y(t) jako sumy kolejnych odpowiedzi skokowych. M-Mt1 tw Powyszy przebieg w(t) jest rwnowany sumie w1 + w2 : M-2Mw1w2ttt1 139 Przypadek przekanika z histerez h. M-Mw2h2h Przeczenia-M +M wystpuj gdy 2) ( ) (ht y t e = ,a+M -M gdy 2) ( ) (ht y t e = . Histereza zwiksza amplitud i zmniejsza czstotliwo drga ustalonych (cyklu granicznego). ttwM-M0 t1t2t3t4t5t6t7t1t2t3t4t5t7e(t)y(t)Mq(t)2Mq(t)-2q(t)Me yt60h Rysunek 15.3. Wyznaczanie odpowiedzi y(t) w przypadku przekanika z histerez. 140 Przypadek przekanika 3-pooeniowego z histerez. hh-MMw2h 2h + 2h 2h + ttwM-M0t1t2t3t4t5t6t1t2t3t4t5e(t)y(t)Mq(t)Mq(t)-Mq(t)e yt60h + Rysunek 15.4. Wyznaczanie odpowiedzi y(t) w przypadku przekanika trjpooeniowego z histerez Wystpuj 4 poziomy przecze: 2) ( ) (ht y t e = 2) ( ) (ht y t e+ = 141 Przypadek przekanika trjpooeniowego z du stref nieczuoci te(t)y(t)Mq(t) Mq(t)e y-Mq(t) Rysunek 15.5.Przedstawiony przykad pokazuje, e dua strefa nieczuoci moe mie dziaanie stabilizujce (oscylacje zanikaj!) Uwaga: Jeli system nie znajduje si pocztkowo w stanie spoczynku, to naley uwzgldni warunki pocztkowe dodajc skadnik yp(t). Zalety metody: 1.Ksztat sygnau wejciowego e(t) moe by dowolny. 2.Nie ma ogranicze na rzd ukadu, opis matematyczny moe nie by znany, a odpowied q(t) wyznaczona dowiadczalnie. 3.Mona uwzgldni opnienie obiektu lub czas przeczenia przekanika . tq M-Mw22- 142 Bibliografia: [1]elazny M.: Podstawy automatyki. PWN, Warszawa 1976 [2]Findeisen W.: Technika regulacji automatycznej. PWN, Warszawa 1969 [3]Wgrzyn S.: Podstawy automatyki. PWN, Warszawa 1980 [4]Gessing R.: Podstawy automatyki. Wydawnictwo Politechniki lskiej 2001 [5]Mazurek J.,Vogt H., Zydanowicz W.: Podstawy automatyki. Oficyna Wydawnicza PW, 2002 [6]Holejko D., Kocielny W., Niewczas W.: Zbir zada z podstaw automatyki. Oficyna Wydawnicza PW, 1985