Wykład 3: Kinematykalayer.uci.agh.edu.pl/Z.Szklarski/3-Kinem-17.pdf · 2017-03-09...
21
Wykład 3: Kinematyka dr inż. Zbigniew Szklarski [email protected] http://layer.uci.agh.edu.pl/Z.Szklarski/
Transcript of Wykład 3: Kinematykalayer.uci.agh.edu.pl/Z.Szklarski/3-Kinem-17.pdf · 2017-03-09...

Wykład 3: Kinematyka
dr inż. Zbigniew Szklarski
[email protected]://layer.uci.agh.edu.pl/Z.Szklarski/

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
2
Wstęp
Opis ruchu
KINEMATYKA
Przyczyny ruchu
DYNAMIKA
MECHANIKA
Dlaczegotaki ruch?

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
3
Podstawowe pojęcia dla ruchu prostoliniowego i krzywoliniowego.
)( 2trr
y
x
)( 1trr
)( 2trr
rr
∆tor ruchu
przemieszczenie )()( 12 trtrrrrr
−=∆
12
12 )()(
tt
trtr
t
rVśr −
−=
∆
∆=
rrrr
y
x
)( 1trr
)( 2trr
rr
∆śrVr
prędkość średnia
gdy t2 → t1 ∆t → dt to ∆r → dr
dt
rdV
rr=
Vr
prędkość chwilowa

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
4
Prędkość chwilowa jako granica prędkości średniej
skoro to
Wektor prędkości
chwilowej jest zawsze
styczny do toru.
Vdt
rd
t
r
t
rrr
==∆∆
→∆lim
0
yjxir ˆˆ +=r
dt
dzV
dt
dyV
dt
dxV
z
y
x
=
=
=yx VjVidt
dyj
dt
dxi
dt
rdV ˆˆˆˆ +=+==
rr

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
5
a=0
Przyspieszenie
Przyspieszenie związane jest
ze zmianą wektora prędkości
Jeżeli to
ponieważ:
dt
Vd
t
Va
t
rrr
=∆∆
=→∆ 0
lim
yx
yx ajaidt
dVj
dt
dVi
dt
Vda ˆˆˆˆ +=+==
rr
dt
dVa
dt
dVa
dt
dVa
zz
y
y
xx
=
=
= V
t
∆t
∆V a>0 a<0consta =r
taVVrrr
+= 0
⇒= adt
dV∫ ∫
=
=V
V
t
t
adtdV
0 0
więc V = V0 + at

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
6
Ruch krzywoliniowy
W ruchu krzywoliniowym
występuje zmiana wektora
prędkości.
v2
v1
Konsekwencją tego jest
występowanie przyspieszenia
pomimo stałej wartości prędkości
v1v2 a
a

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
7
Przyspieszenie styczne i normalne
dt
SdV
rr=
r
S=ϕ
r
dSd =ϕ
dt
dϕω =
ωϕ
===r
V
dt
dS
rdt
d 1
czyli rVrrr
×=ω
ϕrr
Vr
x
y
S
t
SV =Ruch jednostajny

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
8
Związek pomiędzy prędkościąliniową i kątową
w ruchu jednostajnympo okręgu, wektor prędkości kątowej jest stały
reguła śruby!!
x
y
z
rr
Vr
V̂
ωr rV
rrr×=ω

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
9
Ruch niejednostajny po okręgu
)(sin trx ϕ⋅=
)(cos tdt
dr
dt
dxV x ϕ
ϕ==
ϕωϕϕ
sincos 2
2
2
rdt
dr
dt
dVa x
x −==
dla współrzędnej x:
ϕrr
)(tVr
x
y

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
10
czyli xVa xx
2ωω
ε−=
skoro:dt
dϕω =
2
2
dt
d
dt
d ϕωε ==i
to ϕω cosrVx = xr
a x
2cos ωϕω
εω−=oraz
ϕωϕϕ
sincos 2
2
2
rdt
drax −=)(sin trx ϕ⋅=

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
11
analogicznie )(cos try ϕ⋅= ϕω sinrVy −= yVa yy
2ωωε
−=
Skoroyx ajaia ˆˆ +=
rto yjVjxiVia yx
22 ˆˆˆˆ ωωε
ωωε
−+−=r
)ˆˆ()ˆˆ( 2 yjxiVjVia yx +−+= ωωεr
ostatecznie:
rVarrr 2ω
ωε
−=
przyspieszenie styczne przyspieszenie dośrodkowe
xVa xx
2ωω
ε−=mamy:

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
12
Wnioski:
- kiedy maleje składowa Vy prędkości, to rośnie składowa Vx
- przyspieszenie dośrodkowe skierowane jest wzdłuż promienia,
do środka okręgu
- wartość przyspieszenia dośrodkowego jest równa: r
Van
2
=

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
13
Przykłady
1. Pająk porusza się po torze krzywoliniowym, którego
długość opisana jest równaniem:
gdzie S0 i c to stałe. Wektor przyspieszenia pająka tworzy w
każdym punkcie toru stały kąt φ ze styczną do jego toru.
Obliczyć wartość:
a) przyspieszenia stycznego,
b) przyspieszenia normalnego,
c) promienia krzywizny toru jako funkcji długości łuku krzywej.
ROZWIĄZANIE:
a) przyspieszenie styczne
stąd
cteStS 0)( =
2
2
dt
Sd
dt
dVas == cteSc
dt
dSV ⋅⋅== 0
cts eSca 0
2=

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
14
z rysunku wynika że nar
ar
ϕsar
s
n
a
atg =ϕ
stąd
ϕtgaa sn ⋅= ϕtgeSc ct ⋅= 02
z innej definicji przyspieszenia dośrodkowego (normalnego):
r
Van
2
= stąd podstawiając wyliczone wcześniej V:
( )ϕtgeSc
eSc
a
Vr
ct
ct
n ⋅⋅
⋅==
02
220
22
ϕϕ ctgSctgeS ct ⋅=⋅⋅= 0
cteScV ⋅⋅= 0
cteStS 0)( =
b) przyspieszenie normalne:
c) promień krzywizny toru jako funkcja długości łuku krzywej:

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
15
Punkt materialny porusza się po ćwiartce elipsy o równaniu: x2/c2
+ y2/b2 = 1 przy czym x > 0, y > 0, x(0)= 0, y(0) = b,
v(0) = (v0,0).
Wiedząc, że wektor przyspieszenia punktu a = -a(t)j znaleźć:
a)równania ruchu punktu,
b)oblicz po jakim czasie punkt materialny znajdzie się w położeniu
(c, 0),
c)podaj wektor prędkości punktu oraz jego wartość,
d)oblicz prędkość punktu materialnego w punkcie (c, 0).

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
16
Inne ruchy krzywoliniowe
� Rzut ukośny
jest to złożenie dwóch
niezależnych ruchów-
- ruchu jednostajnego
(poziomo)
- ruchu jednostajnie
zmiennego (pionowo)
x
y

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
17
HRW,1Oś x:
Fx=0; ax=0,
ruch jednostajny
Oś y:
Fy=mg; ay=g,
ruch jednostajnie zmienny

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
18
HRW,1jgg ˆ−=rOś x:
tvx
constvv
x
xx
=
== 0
Oś y:
2
2
0
0
gttvy
gtvv
y
yy
−=
−=
200
2
0)θcosv(2
gxx)θtg(y −=
równanie toru - parabola

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
19
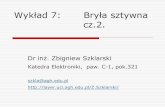
..a tak jest naprawdę:
Siła oporu powietrza wpływa na tor rzutu ukośnego !
Piłka do gry w baseball rzucona pod kątem 45° zprędkością v = 50 m/sosiąga:
• bez oporu powietrza -- wysokość 63 m, - zasięg 254 m,
• z oporem powietrza -- wysokość 31 m, - zasięg 122 m
tor w
próżni
tor w
powietrzu
45o
optymalny kąt rzutu wynosi:
20o- 30o

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
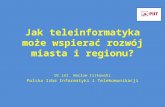
20
Dla osi OX Dla osi OY
ruch jednostajny ruch jednostajnie
przyspieszony
X(t) = Vx⋅t
Rzut poziomy
x
y
xVr
xVr
xVr
xVr
yVr
yVr
yVr V
r
Vr
Vr2
)(2gt
tY =
Równanie toru – parabola – typu:
V0 = Vx = const
0V
xt =
⇓
2
0
2
2
0
22)(
V
gxV
xg
ty =
=
⇒
⇓
y(t) = bx2
tgVtVVtV yx
rrrrr+=+= 0)()(

2017-03-09 Wydział Informatyki, Elektroniki i Telekomunikacji - Teleinformatyka
21
Przykład
Piłkę wyrzucono ukośnie w górę pod kątem 450 z prędkościąpoczątkową V0= 12 m/s. W odległości 12 m od miejsca wyrzutu stoi pionowa ściana. Oblicz:
1. czas tt po którym piłka trafi w ścianę,
2. składowe prędkości piłki Vx i Vy w momencie trafienia i szybkość
wypadkową V,
3. kąt pod jakim piłka trafi w ścianę,
4. maksymalną wysokość H na jaką wzniesie się piłka,
5. wysokość od podstawy ściany h na jakiej piłka w nią uderzy,
6. w jakiej odległości X od ściany piłka po sprężystym od niej
odbiciu uderzy w ziemię.