Wielozadaniowe mobilne roboty …
27
Wielozadaniowe mobilne roboty … 1/27 Politechnika Śląska Instytut Technologii Eksploatacji – PIB Zadanie badawcze: II.4.1. Wielozadaniowe mobilne roboty wykorzystujące zaawansowane technologie Kierownik zadania: Prof. dr hab. inż. Wojciech MOCZULSKI Obejmuje okres: 1.07.2010 ÷ 31.12.2010 II.4. 1
-
Upload
gloria-owens -
Category
Documents
-
view
53 -
download
0
description
Wielozadaniowe mobilne roboty …. 1 /27. II.4.1. Opracowanie i wykonanie zespołu robotów mobilnych przystosowanych do monitorowania obiektów technicznych i wykonywania specjalistycznych zadań w ramach nadzoru eksploatacyjnego i ochrony przed zagrożeniami. Cel realizacji zadania badawczego. - PowerPoint PPT Presentation
Transcript of Wielozadaniowe mobilne roboty …

Wielozadaniowe mobilne roboty … 1/27
Politechnika ŚląskaInstytut Technologii Eksploatacji – PIB
Zadanie badawcze: II.4.1.
Wielozadaniowe mobilne roboty wykorzystujące zaawansowane technologie
Kierownik zadania: Prof. dr hab. inż. Wojciech MOCZULSKI
Obejmuje okres:
1.07.2010 ÷ 31.12.2010
II.4.1

Cel realizacji zadania badawczego
Wielozadaniowe mobilne roboty …II.4.1
Opracowanie i wykonanie zespołu robotów mobilnych przystosowanych do
monitorowania obiektów technicznych i wykonywania specjalistycznych zadań
w ramach nadzoru eksploatacyjnego i ochrony przed zagrożeniami.
Zaplanowany rezultat końcowy:
II.4.1_U_1_1 Robot bazowy „Transporter” (1 szt.) II.4.1_U_1_2 Specjalistyczny robot inspekcyjny "Pathfinder" (2 szt.)II.4.1_U_1_3 Specjalistyczny robot inspekcyjny "Explorer" (1 szt.)
2/27

Harmonogram
Wielozadaniowe mobilne roboty …II.4.1 3/27

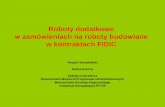
Projekt platformy robota Transporter oraz Explorer
Wielozadaniowe mobilne roboty …II.4.1
Urządzenie do pobierania próbek + zestaw czujników
ManipulatorKosz transportowy
Uniwersalna platforma nośna
TRANSPORTER
EXPLORER
Konfiguracja robotów opartych o uniwersalną platformę nośną
4/27

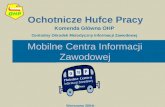
1050
550
7501400
220
Gąsienice pomocnicze
Płyta montażowaNapędy główne
Skrzynia z akumulatorami
Masa własna 100 kg
Masa całkowita 150 kg
Projekt platformy robota Transporter oraz ExplorerGłówne wymiary
Wielozadaniowe mobilne roboty …II.4.1 5/27

Projekt platformy robota Transporter oraz ExplorerUkłady platformy nośnej
Wielozadaniowe mobilne roboty …II.4.1
Przestrzeń do montowania elektroniki
Przestrzeń napędu podnoszenia gąsienicy z układem napinania pasa
Układy łożyskowania i przeniesienia napęduŚruba napinająca
Oprawa przesuwna
Silnik + przekładnia planetarna
6/27

Typ silnika Silniki DC
Liczba silników 2
Napięcie zasilania [V] 24
Typ przekładni Planetarna
Moc nominalna [W] 480
Maksymalny moment [Nm] 300
Masa napędu [kg] 13,2
Prędkość maksymalna [km/h] 5
Kąt podjazdu [%] 40
Projekt platformy robota Transporter oraz ExplorerNapęd główny
Wielozadaniowe mobilne roboty …II.4.1
Silnik
Przekładnia planetarna
Uchwyt umożliwiający naciąganie pasa
Koło napędowe
7/27

Typ silnika Silnik DC
Napięcie zasilania [V] 24
Moc nominalna [W] 120
Maksymalny moment [Nm] 350
Masa zespołu napędowego [kg] 11,4
Typ przekładniPlanetarna i
pasowa
Zakres ruchu [ ˚] 180
Szybkość działania (pełny zakres) [s] 4
Projekt platformy robota Transporter oraz ExplorerNapęd pomocniczy
Wielozadaniowe mobilne roboty …II.4.1
Silnik Hamulec
Przekładnia planetarna
Przekładnia pasowa
Uchwyt mocującyZakres ruchu
8/27

Projekt platformy robota Transporter oraz ExplorerZasilanie
Wielozadaniowe mobilne roboty …II.4.1
Rama z profili aluminiowych
Poszycie z blachy aluminiowej
Ogniwa akumulatora
( 2 x 4 szt.)
Typ ogniwLitowo-fosforowo-
żelazowe
Ilość ogniw 8
Masa akumulatorów [kg]
12
Pojemność baterii [Ah] 40
Warunki pracy napędu Średnie Lekkie Ciężkie
Czasowe wykorzystanie napędu [%]
100 80 70
Pobór mocy [W]
Napęd 480 160 780
Komputer 80 80 80
Sensory 20 20 20
Czas pracy [h] 1,66 4,21 1,49
9/27

Projekt platformy robota Transporter
Wielozadaniowe mobilne roboty …II.4.1
Załadowane cztery roboty Pathfinder
Listwa ramowa 4x13,5x0,8
Blacha perforowana otworowa
Rg 10-20,78 gr. 1mm
Siatka zgrzewana 25x25x0,8
Blacha perforowana
Qg 3-5 gr. 1mm
250
mm
Kosz przystosowany do transportu innych
ładunków
Wyjmowane i składane przegródki
Kosz robota Transporter
10/27

Projekt platformy robota Pathfinder
Wielozadaniowe mobilne roboty …II.4.1
350
300
140÷
15033
÷38
KAMERA Z OŚWIETLACZEM
CZUJNIK TEMPERATURY
OTOCZENIA
Masa własna 5 kg
Masa całkowita 5,5 kgMIKROFON I GŁOŚNIK
11/27

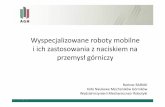
Projekt platformy robota Pathfinder
Wielozadaniowe mobilne roboty …II.4.1
Modułowy korpus
WYMIENNY MODUŁ
UKŁADÓW SENSORYCZNYCH
WYMIENNY KORPUS
AKUMULATORA
POKRYWA KORPUSU
KORPUS ROBOTA
12/27

Projekt platformy robota Pathfinder
Wielozadaniowe mobilne roboty …II.4.1
Układ napędowy i jezdny
PIASTA KOŁA
OBRĘCZSILIKONOWA
OPONAUCHWYT SILNIKA
SILNIK Z PRZEKŁADNIĄ
13/27

Projekt platformy robota Pathfinder
Wielozadaniowe mobilne roboty …II.4.1
Uchwyt do przenoszenia robota oraz antena do komunikacji
14/27

Manipulator
Wielozadaniowe mobilne roboty …II.4.1 15/27
Zakresy działania
Podstawa wraz ze sterowaniem
5 stopni swobody

Manipulator
Wielozadaniowe mobilne roboty …II.4.1 16/27
Zintegrowany układ napędowy
Sterownik
Zabudowany układ napędowy- zabezpieczenie przed czynnikami atmosferycznymi- dodatkowe łożyskowanie

Układ pobierania próbek
Koncepcja
Wielozadaniowe mobilne roboty …II.4.1 17/27
Koncepcje układu do pobierania próbekUkład wbijający próbnik
Wkręcanie próbnika
Obrotowy magazyn na 4 próbki
Dwa stopnie swobody
Śrubowe zabezpieczenie próbnika

Układ pobierania próbek
Rozwiązania szczegółowe
Wielozadaniowe mobilne roboty …II.4.1 18/27
Siła wkręcania – 3600 N
Napęd Dunkenmotoren
Napęd próbnika
Prędkość obr.: 32 RPMSkok na obr.: 8 mm
Przekładnia paskowa zębata 1:2,99
Łożyskowanie + prowadzenie śruby
Przekładnia układu magazynu

System mocowania czujników
Komponenty
Wielozadaniowe mobilne roboty …
Prowadnica DryLine 17Obudowa aluminiowa CP-FA7
Dławik PG7
Obudowa elektroniki układu mocowania
Płytka układu zatrzaskowego
II.4.1
Gniazdo G30E3M
19/27

System mocowania czujników
Zasada działania
Wielozadaniowe mobilne roboty …II.4.1
Zatrzask GN615-KS Łożysko NW-02-17
Uniwersalne mocowanie dla dużych czujników Obudowa IP65 dla małych czujników
Wtyk G30E3F
20/27

ARM9ETHERNET
USB / AUDIO
USB / VIDEO
PWM
SPI
I2C
ETHERNET
ARM9USB / VIDEO
USB / AUDIO
PWM
I2C
SPIAVRRS232
Zadania wysokopoziomowe Zadania niskopoziomowe
System sterowania
Struktura
Wielozadaniowe mobilne roboty …II.4.1 21/27

System sterowania
Elementy układu sterowania
Wielozadaniowe mobilne roboty …II.4.1
Oświetlacz Czujnik temperatury
Elementy układów monitorowania otoczenia
Jednostka centralna
Elementy napędu
22/27

System sterowania
Układy komunikacyjne
Wielozadaniowe mobilne roboty …II.4.1
Pentagram Hornet 802.11n
Rozwiązanie amatorskie
Ubiquiti BulletM2
Rozwiązanie profesjonalne
Radiolinx RLXIB-IHW
Rozwiązanie przemysłowe
23/27

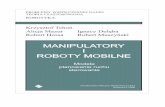
System sterowania
Układy komunikacyjne - badanie zasięgu różnych rozwiązań
Wielozadaniowe mobilne roboty …II.4.1
A) Rozwiązanie amatorskie
B) Rozwiązanie profesjonalne
C) Rozwiązanie przemysłowe
- Brak łączności
Punkt A [%] B [dBm] C [dBm]
1 100 -32 -42
2 96 -45 -45
3 52 -70 -82/89
4 36 -80 -
5 32 -84 -
6 - -86 -
7 82 -32 -52
8 42 -82 -88
9 - -84 -
6
AP78
95432
1
R=50m
24/27

Podsumowanie
Wielozadaniowe mobilne roboty …II.4.1
Uzyskane efekty praktyczne obejmują następujące rozwiązania konstrukcyjne:
rozwiązanie konstrukcyjne modelowej platformy nośnej robota Pathfinder;
rozwiązanie konstrukcyjne układu pozycjonowania anteny robota Pathfinder;
rozwiązanie konstrukcyjne modelowej platformy gąsienicowej robotów Transporter/Explorer;
rozwiązanie konstrukcyjne manipulatora modularnego (dla robota Transporter);
rozwiązanie konstrukcyjne urządzenia do pobierania próbek gleby (dla robota Explorer);
rozwiązanie konstrukcyjne systemu mocowania modułowych czujników.
Planowane prace w ramach kolejnego etapu w I półroczu 2011 roku, obejmują:
w ramach KM III - kontynuację opóźnionych prac wykonawczych konstrukcji robotów oraz opracowanie kompletnej dokumentacji konstrukcyjnej modułów monitorowania otoczenia,
w ramach KM IV - kontynuację prac obejmujących układy sterowania robotów.
2
1
25/27

Przewidywane kierunki komercjalizacji robotów
Wielozadaniowe mobilne roboty …II.4.1
Przeglądy eksploatacyjne i kontrole obiektów technicznych prowadzone przez firmy specjalistyczne:
• otrzymywanie informacji o charakterze ilościowym i jakościowym o obiekcie podlegającym
inspekcji,• monitorowanie pomieszczeń i przestrzeni otwartych, wizualna ocena stanu otoczenia (inspekcja wizyjna),
Wspomaganie działania służb ratunkowo-gaśniczych: • przewóz ładunków niebezpiecznych, • pobieranie próbek na skażonym terenie, • detekcję i lokalizację wycieków instalacji chemicznych,• detekcja zagrożenia pożarowego, • lokalizacja osób poszkodowanych na terenie gruzowiska, pogorzeliska, szczególnie w miejscach trudnodostępnych - w tym zdalny kontakt głosowy z poszkodowanymi,
Wspomaganie działania służb ratownictwa górniczego (ratownictwa technicznego kopalni): • otrzymywanie informacji o charakterze ilościowym i jakościowym dotyczących atmosfery podziemnej w kopalni,• lokalizacja osób poszkodowanych na terenie po podziemnym zawale, pożarze, wybuchu, szczególnie w miejscach trudnodostępnych - w tym zdalny kontakt głosowy z poszkodowanymi.
26/27

Dziękujemy za uwagę
Wielozadaniowe mobilne roboty …II.4.1 27/27