USB SD RS232 - HMI-Mastermobile.hmi-master.at/mediawiki/images/0/07/... · 2018-03-24 · HMI -...
14
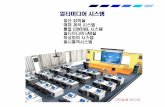
LAN GND 24V + CAN H CAN L RS485A RS485 B N.C. N.C. RS232 SD USB +KNX GND Reset TRM 6 TE 192.168.1.100 1TE 230V~ 1A1 PWR 1A2 RS 232 2-RX 3-TX 5-GND 1.0000 1.0000 Spannungsversorgung Control A 8 B C 7 6 5 D E F 8 + = 7 6 5 4 2 3 1 A B C 4 2 3 D E 1 F Titel Projektbez. d c b a Name Datum Zust. Name Datum Änderung Achtung: eigene Stromversorgung - Auf keinen Fall darf die Spannungsversorgung vom KNX Bus als Spannungsversorgung für die HMI Control verwendet werden! RS485 Verkabelung: empfohlen Unitronic@BUS LD Kabel von Fa. LAPPGroup MOD BUS: 2 Stk. Widerstände 120 Ohm parallel beim Control und am weit entferntesten Gerät
Transcript of USB SD RS232 - HMI-Mastermobile.hmi-master.at/mediawiki/images/0/07/... · 2018-03-24 · HMI -...
LAN
GN
D24
V +
CAN
HCA
N L
RS48
5ARS
485
B
N.C
.N
.C.
RS232SDUSB
+KN
XG
ND
Rese
tTR
M
6 TE
192.168.1.100
1TE
230V~
1A1
PWR
1A2
RS 2322-RX3-TX
5-GND
1.0000
1.0000Spannungsversorgung
Control
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
Achtung: eigene Stromversorgung
- Auf keinen Fall darf die Spannungsversorgung vom KNX Bus als Spannungsversorgung für die HMI Control verwendet werden!
RS485 Verkabelung: empfohlen Unitronic@BUS LD Kabel von Fa. LAPPGroupMOD BUS: 2 Stk. Widerstände 120 Ohm parallel beim Control und am weit entferntesten Gerät
HMI - Control
LAN
GN
D24
V +
CAN
HCA
N L
RS48
5ARS
485
B
N.C
.N
.C.
RS232SDUSB
+KN
XG
ND
Rese
tTR
M
6 TE
192.168.1.100
IP Gateway
2TE
DC/AC
1TE
230V~
1A1
PWR
1A41A2
KNX
Seriennr.
RS 2322-RX3-TX
5-GND
1.0000
1.0000
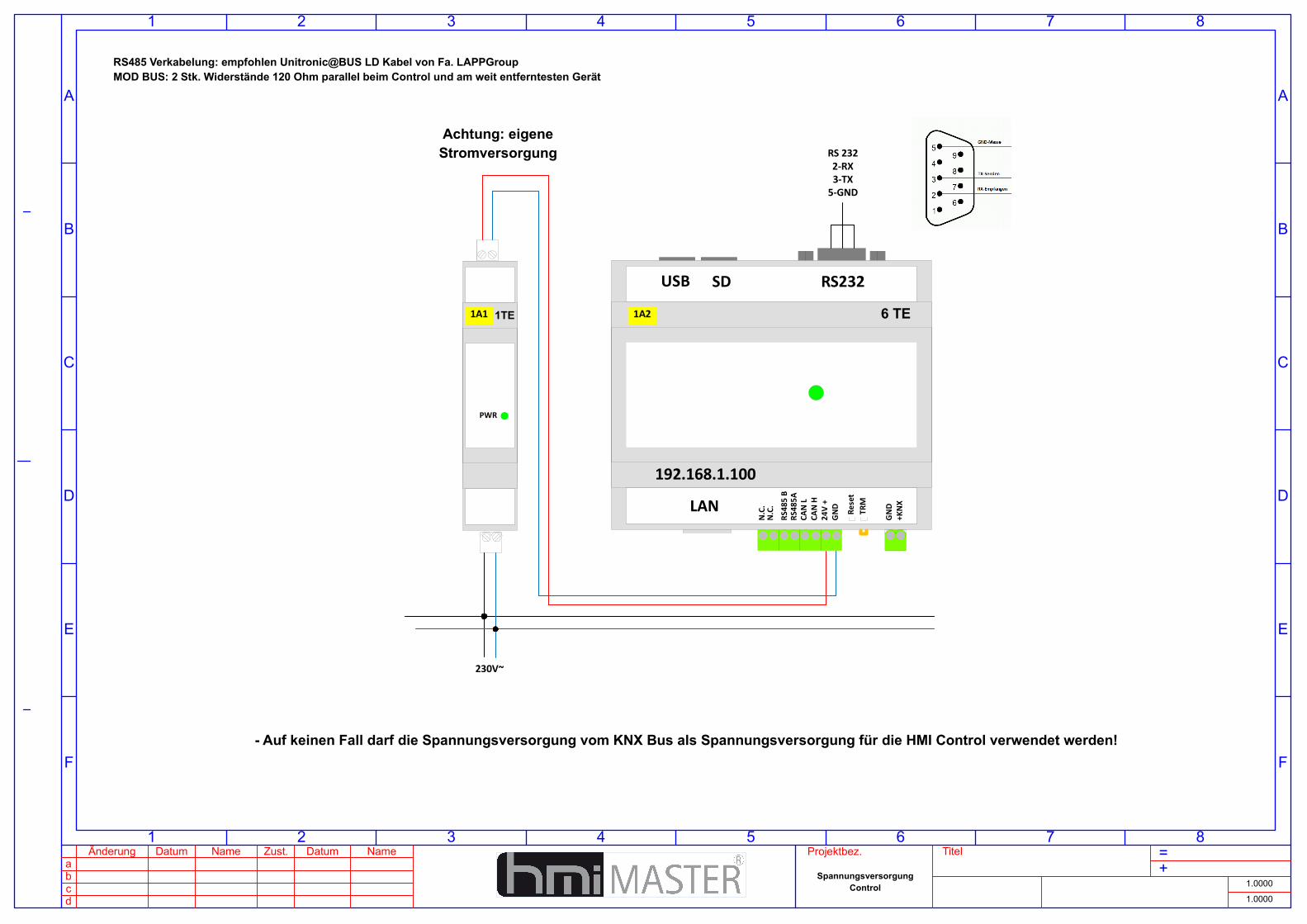
Spannungsversorgung, HMI Control, Spannungsversorgung,
IP Gateway
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
LAN
1TE1A3
PWR
230V~
Achtung: eigene Stromversorgung
- verwenden Sie für den HMI Master und für das IP Gateway eine eigene Stromversorgung- Auf keinen Fall darf die Spannungsversorgung vom KNX Bus verwendet werden!!!!!!!!!!!
RS485 Verkabelung: empfohlen Unitronic@BUS LD Kabel von Fa. LAPPGroupMOD BUS: 2 Stk. Widerstände 120 Ohm parallel beim Control und am weit entferntesten Gerät
HMI - Control
LAN
GN
D24
V +
CAN
HCA
N L
RS48
5ARS
485
B
N.C
.N
.C.
RS232SDUSB
+KN
XG
ND
Rese
tTR
M
6 TE
192.168.1.100
IP Gateway
2TE1TE
230V~
1A1
PWR
1A41A2
Seriennr.
RS 2322-RX3-TX
5-GND
1.0000
1.0000
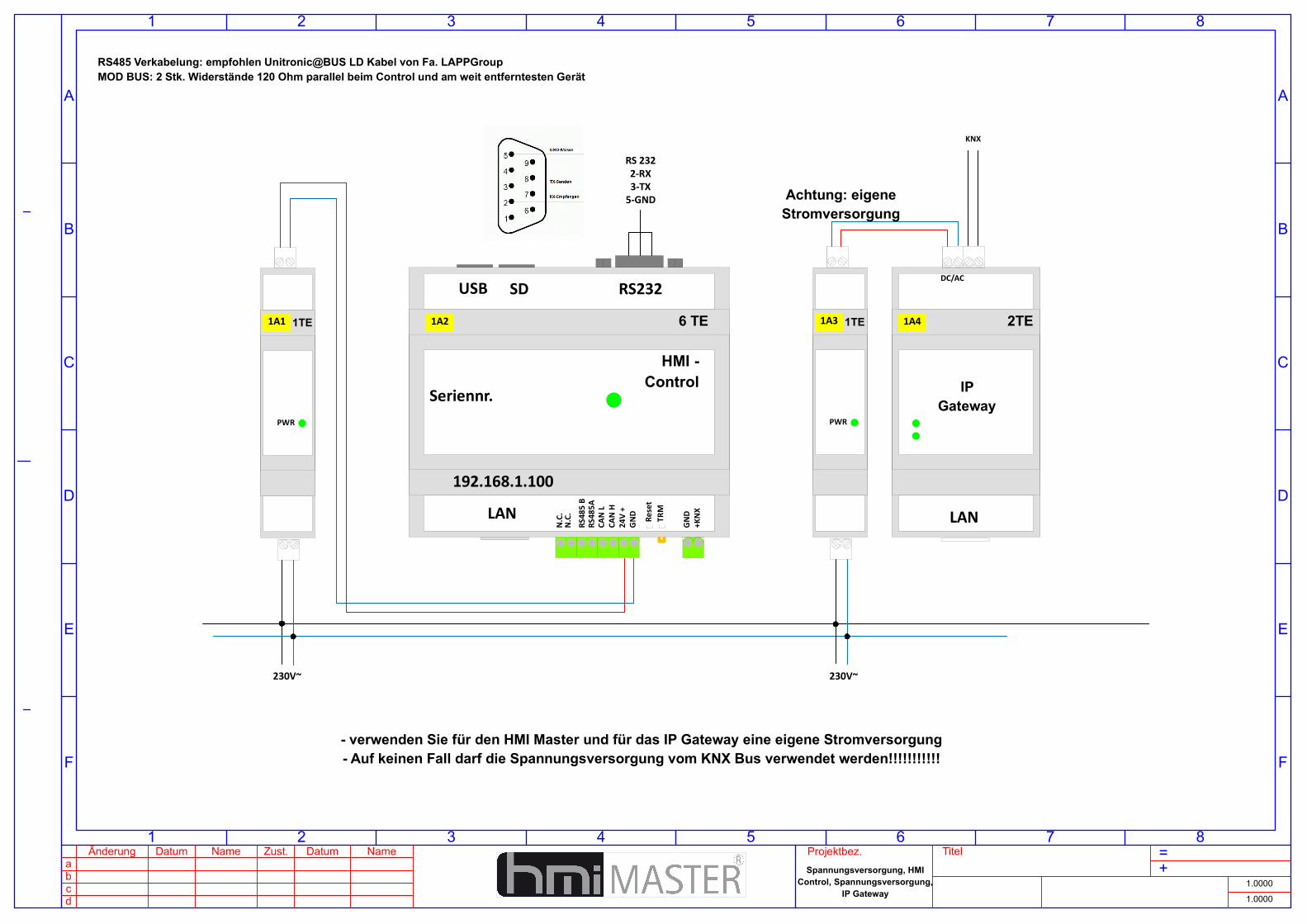
Spannungsversorgung, Control, Spannungsversorgung,
Gateway, IO ohne Display
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
1TE1A3
PWR
230V~Endwiderstand beim LETZTEN IO SETZEN!
24VDC 12VDC
KNX
DC/
AC
GN
D12
VDC
GN
D24
VDC
IO-Modul
AI 1
AI 2
AI 3
AI 4
AI 5
AI 6
AI 7
AI 8
GN
D 1
GN
D 2
CAN
HCA
N L
L N IN 1
IN 2
COM
A1
A2
A3
A4
COM
A5
A6
A7
A8
COM
A9
Fühler 1-8
1A5
Achtung!Eigene Stromversorgung
LAN
- verwenden Sie für den HMI Control und für das IP Gateway immer getrennte Spannungsversorgungen!- Auf keinen Fall darf die Spannungsversorgung vom KNX Bus verwendet werden!
RS485 Verkabelung: empfohlen Unitronic@BUS LD Kabel von Fa. LAPPGroupMOD BUS: 2 Stk. Widerstände 120 Ohm parallel beim Control und am weit entferntesten Gerät
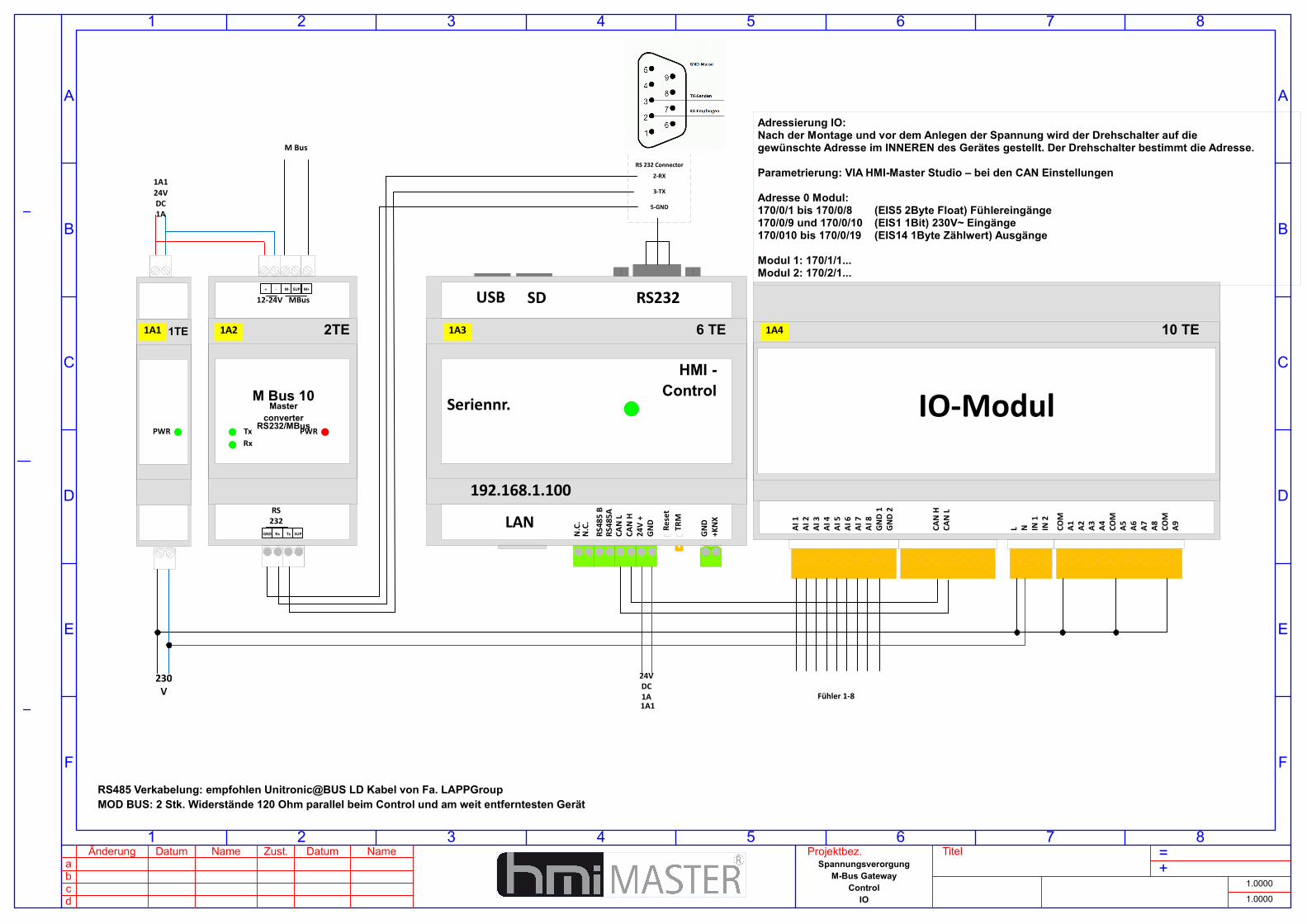
Adressierung IO:Nach der Montage und vor dem Anlegen der Spannung wird der Drehschalter auf diegewünschte Adresse im INNEREN des Gerätes gestellt. Der Drehschalter bestimmt die Adresse.
Parametrierung: VIA HMI-Master Studio – bei den CAN Einstellungen
Adresse 0 Modul:170/0/1 bis 170/0/8 (EIS5 2Byte Float) Fühlereingänge170/0/9 und 170/0/10 (EIS1 1Bit) 230V~ Eingänge170/010 bis 170/0/19 (EIS14 1Byte Zählwert) Ausgänge
Modul 1: 170/1/1...Modul 2: 170/2/1...
HMI - Control
LAN
GN
D24
V +
CAN
HCA
N L
RS48
5ARS
485
B
N.C
.N
.C.
RS232SDUSB
+KN
XG
ND
Rese
tTR
M
6 TE
192.168.1.100
M Bus 60
2TE
Error
ReadyPWR
RS 232
Master converter
RS232/MBus
1TE
24V DC1A
230V
1A1
PWR
1A2 1A3
1A1
Seriennr.
1.0000
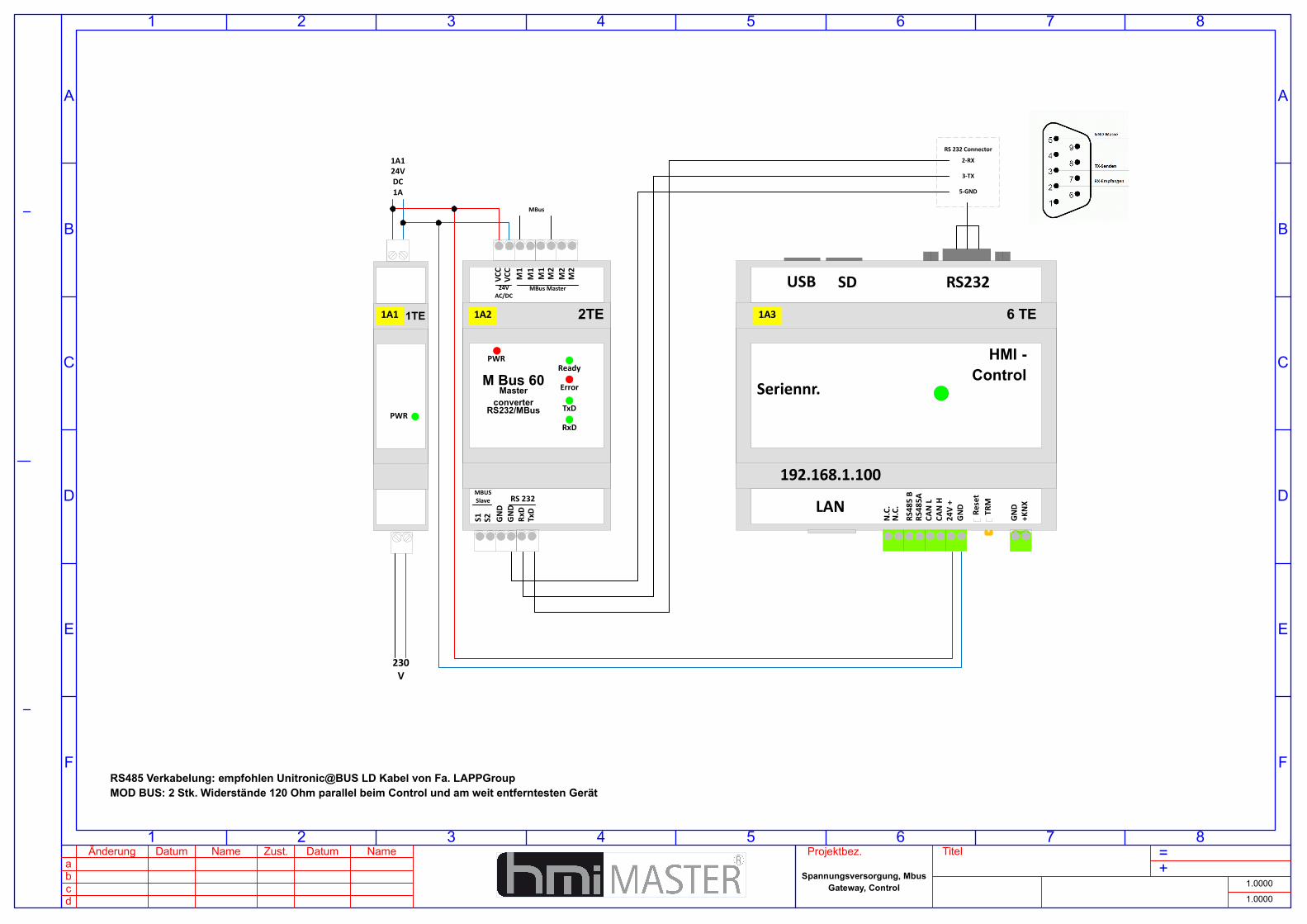
1.0000Spannungsversorgung, Mbus
Gateway, Control
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
S1 S2 GN
DG
ND
RxD
TxD
MBUSSlave
RxD
TxD
VCC
VCC
M1
M1
M1
M2
M2
M2
24VAC/DC
MBus Master
MBus
2-RX
3-TX
5-GND
RS 232 Connector
RS485 Verkabelung: empfohlen Unitronic@BUS LD Kabel von Fa. LAPPGroupMOD BUS: 2 Stk. Widerstände 120 Ohm parallel beim Control und am weit entferntesten Gerät
HMI - Control
LAN
GN
D24
V +
CAN
HCA
N L
RS48
5ARS
485
B
N.C
.N
.C.
RS232SDUSB
+KN
XG
ND
Rese
tTR
M
6 TE
24V DC1A
192.168.1.100
M Bus 10
2TE
TxRx
PWR
RS 232
GND TX RX SUP
+ - M- SUP M+
MBus12-24V
Master converter
RS232/MBus
1TE
24V DC1A
230V
1A1
PWR
1A2 1A3
1A1
1A1
M Bus
Seriennr.
1.0000
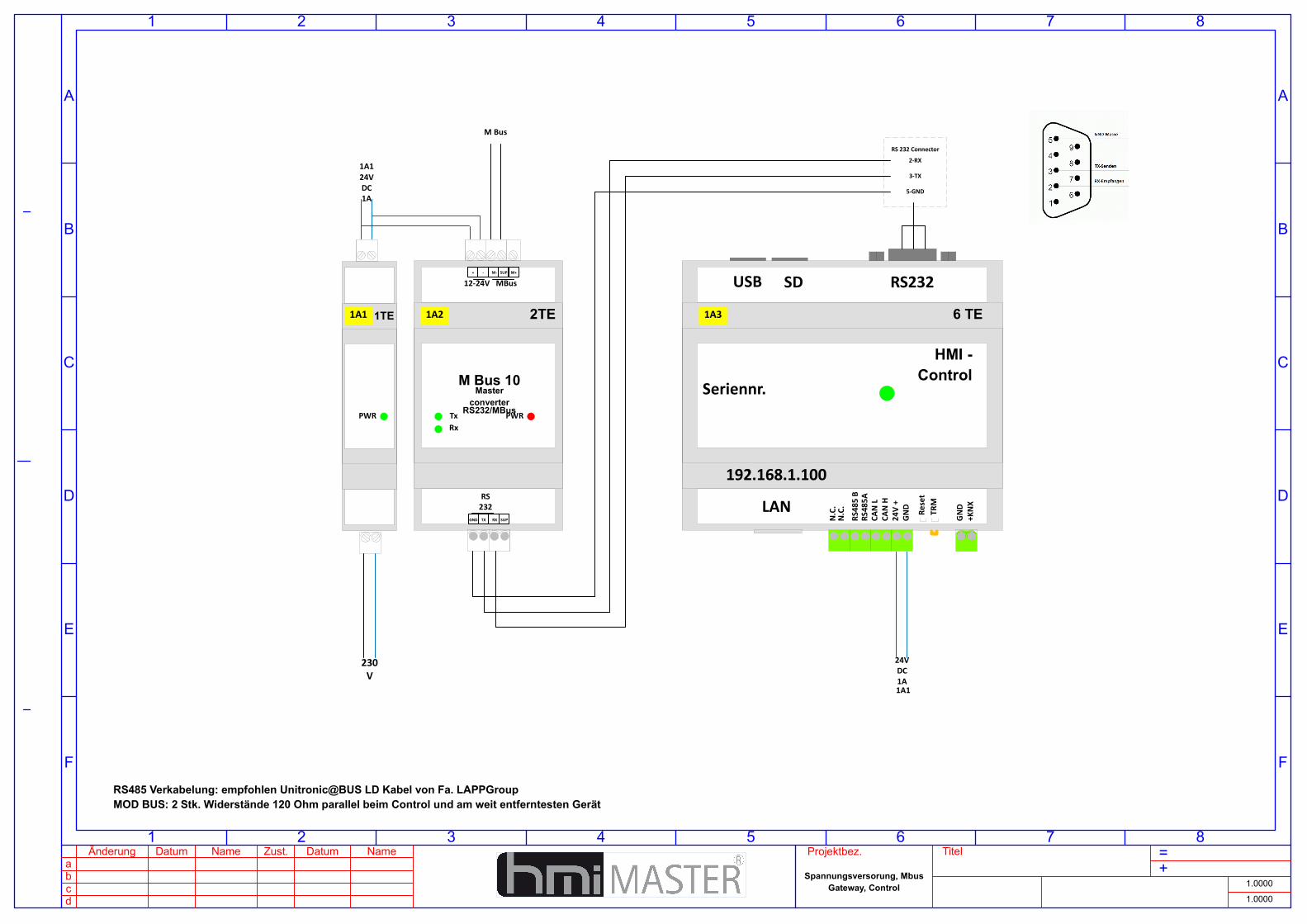
1.0000Spannungsversorung, Mbus
Gateway, Control
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
2-RX
3-TX
5-GND
RS 232 Connector
RS485 Verkabelung: empfohlen Unitronic@BUS LD Kabel von Fa. LAPPGroupMOD BUS: 2 Stk. Widerstände 120 Ohm parallel beim Control und am weit entferntesten Gerät
IO-Modul
AI 1
AI 2
AI 3
AI 4
AI 5
AI 6
AI 7
AI 8
GN
D 1
GN
D 2
CAN
HCA
N L
L N IN 1
IN 2
COM
A1
A2
A3
A4
COM
A5
A6
A7
A8
COM
A9
HMI - Control
LAN
GN
D24
V +
CAN
HCA
N L
RS48
5ARS
485
B
N.C
.N
.C.
RS232SDUSB
+KN
XG
ND
Rese
tTR
M
6 TE 10 TE
192.168.1.100
Fühler 1-8
1TE
24V DC1A
230V
1A1
PWR
1A3
1A1
Seriennr.
RS 2322-RX3-TX
5-GND
1A4
1.0000
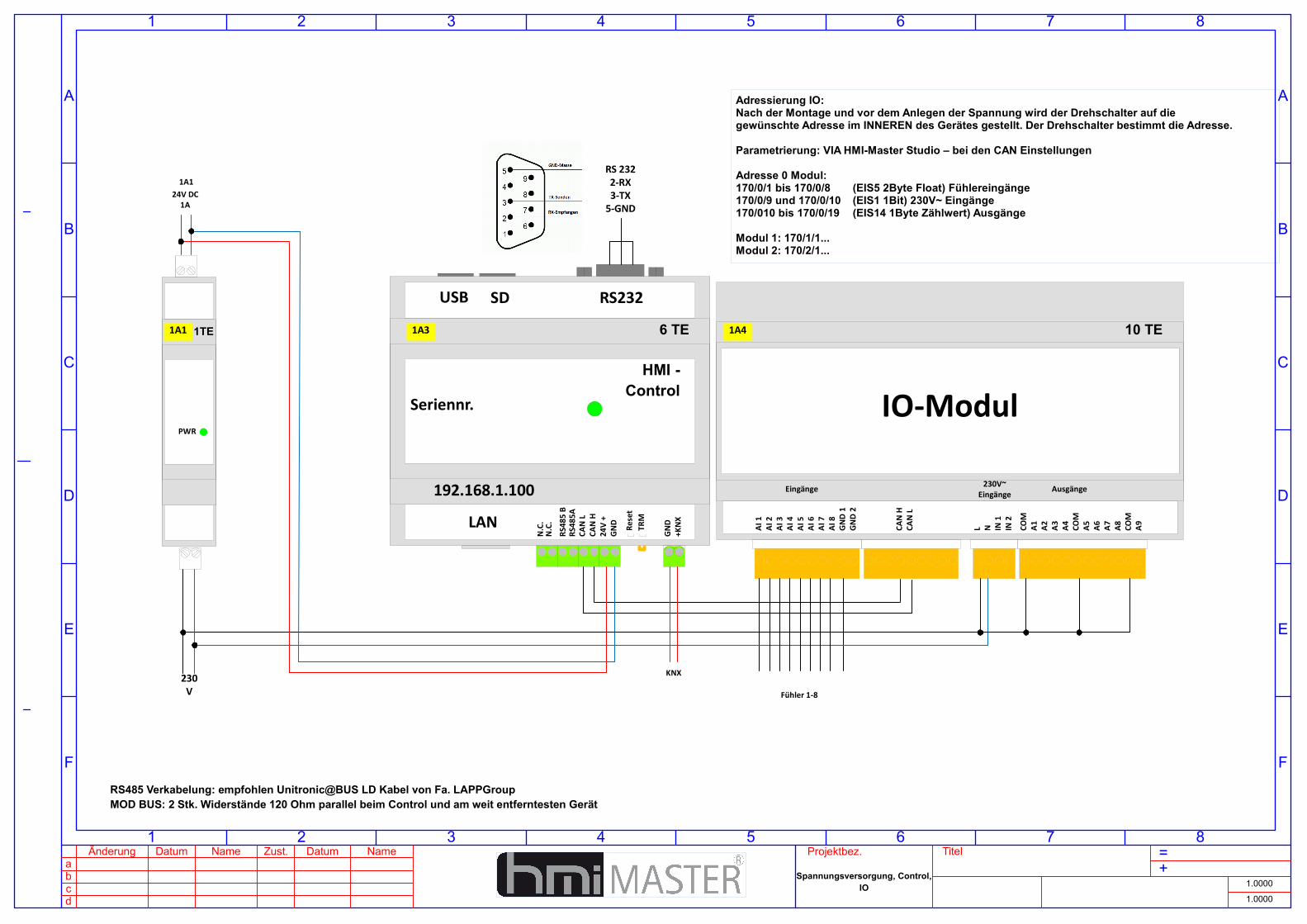
1.0000Spannungsversorgung, Control,
IO
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
KNX
Eingänge Ausgänge230V~ Eingänge
RS485 Verkabelung: empfohlen Unitronic@BUS LD Kabel von Fa. LAPPGroupMOD BUS: 2 Stk. Widerstände 120 Ohm parallel beim Control und am weit entferntesten Gerät
Adressierung IO:Nach der Montage und vor dem Anlegen der Spannung wird der Drehschalter auf diegewünschte Adresse im INNEREN des Gerätes gestellt. Der Drehschalter bestimmt die Adresse.
Parametrierung: VIA HMI-Master Studio – bei den CAN Einstellungen
Adresse 0 Modul:170/0/1 bis 170/0/8 (EIS5 2Byte Float) Fühlereingänge170/0/9 und 170/0/10 (EIS1 1Bit) 230V~ Eingänge170/010 bis 170/0/19 (EIS14 1Byte Zählwert) Ausgänge
Modul 1: 170/1/1...Modul 2: 170/2/1...
IO-Modul
AI 1
AI 2
AI 3
AI 4
AI 5
AI 6
AI 7
AI 8
GN
D 1
GN
D 2
CAN
HCA
N L
L N IN 1
IN 2
COM
A1
A2
A3
A4
COM
A5
A6
A7
A8
COM
A9
HMI - Control
LAN
GN
D24
V +
CAN
HCA
N L
RS48
5ARS
485
B
N.C
.N
.C.
RS232SDUSB
+KN
XG
ND
Rese
tTR
M
6 TE 10 TE
192.168.1.100
Fühler 1-8
M Bus 60
2TE
Error
ReadyPWR
RS 232
Master converter
RS232/MBus
1TE
24V DC1A
230V
1A1
PWR
1A2 1A3
1A1
Seriennr.
1A4
1.0000
1.0000
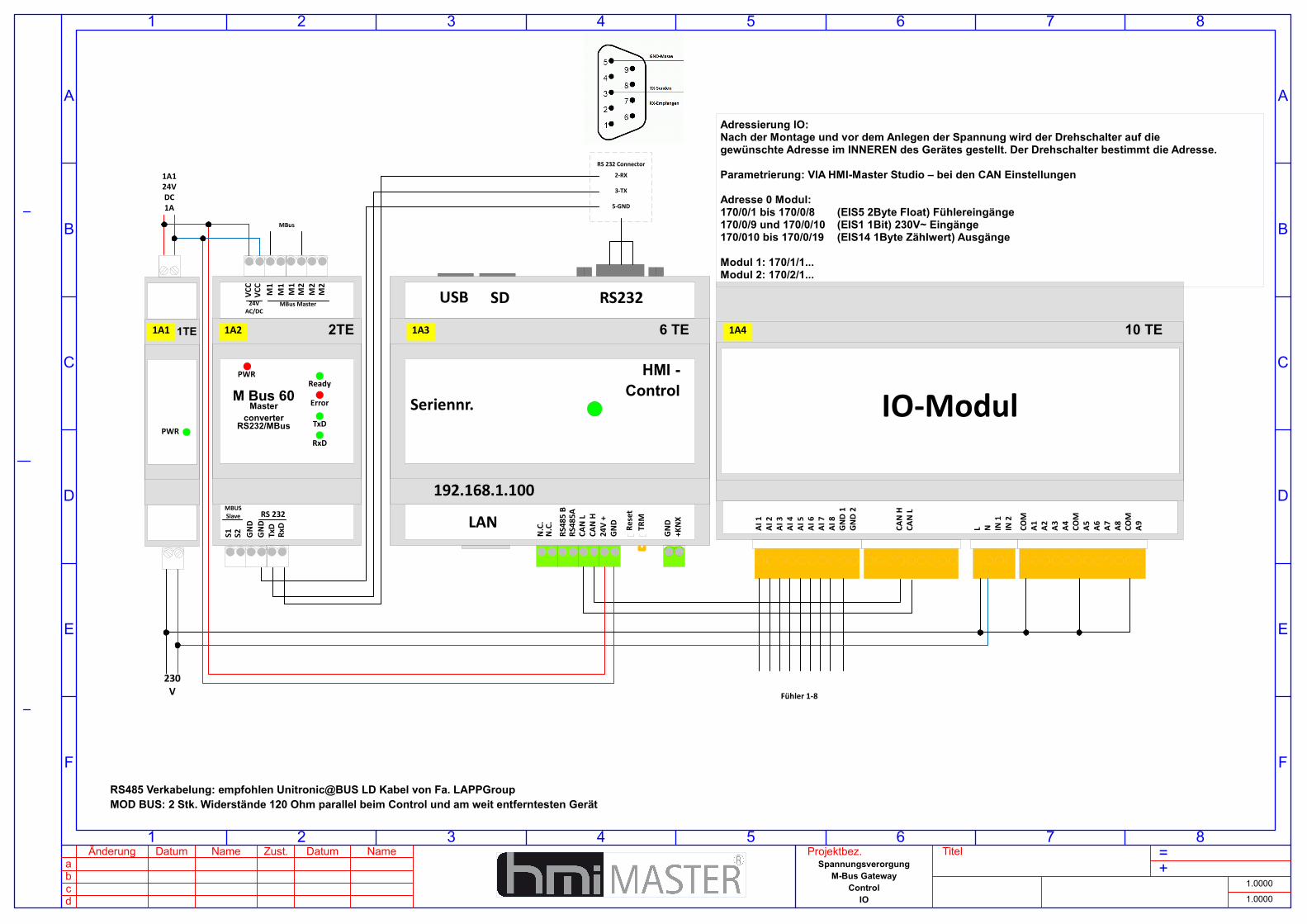
SpannungsverorgungM-Bus Gateway
ControlIO
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
S1 S2 GN
DG
ND
TxD
RxD
MBUSSlave
RxD
TxD
VCC
VCC
M1
M1
M1
M2
M2
M2
24VAC/DC
MBus Master
MBus
2-RX
3-TX
5-GND
RS 232 Connector
RS485 Verkabelung: empfohlen Unitronic@BUS LD Kabel von Fa. LAPPGroupMOD BUS: 2 Stk. Widerstände 120 Ohm parallel beim Control und am weit entferntesten Gerät
Adressierung IO:Nach der Montage und vor dem Anlegen der Spannung wird der Drehschalter auf diegewünschte Adresse im INNEREN des Gerätes gestellt. Der Drehschalter bestimmt die Adresse.
Parametrierung: VIA HMI-Master Studio – bei den CAN Einstellungen
Adresse 0 Modul:170/0/1 bis 170/0/8 (EIS5 2Byte Float) Fühlereingänge170/0/9 und 170/0/10 (EIS1 1Bit) 230V~ Eingänge170/010 bis 170/0/19 (EIS14 1Byte Zählwert) Ausgänge
Modul 1: 170/1/1...Modul 2: 170/2/1...
IO-Modul
AI 1
AI 2
AI 3
AI 4
AI 5
AI 6
AI 7
AI 8
GN
D 1
GN
D 2
CAN
HCA
N L
L N IN 1
IN 2
COM
A1
A2
A3
A4
COM
A5
A6
A7
A8
COM
A9
HMI - Control
LAN
GN
D24
V +
CAN
HCA
N L
RS48
5ARS
485
B
N.C
.N
.C.
RS232SDUSB
+KN
XG
ND
Rese
tTR
M
6 TE 10 TE
24V DC1A
192.168.1.100
Fühler 1-8
M Bus 10
2TE
TxRx
PWR
RS 232
GND Rx Tx SUP
+ - M- SUP M+
MBus12-24V
Master converter
RS232/MBus
1TE
24V DC1A
230V
1A1
PWR
1A2 1A3
1A1
1A1
M Bus
Seriennr.
1A4
1.0000
1.0000
SpannungsverorgungM-Bus Gateway
ControlIO
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
2-RX
3-TX
5-GND
RS 232 Connector
RS485 Verkabelung: empfohlen Unitronic@BUS LD Kabel von Fa. LAPPGroupMOD BUS: 2 Stk. Widerstände 120 Ohm parallel beim Control und am weit entferntesten Gerät
Adressierung IO:Nach der Montage und vor dem Anlegen der Spannung wird der Drehschalter auf diegewünschte Adresse im INNEREN des Gerätes gestellt. Der Drehschalter bestimmt die Adresse.
Parametrierung: VIA HMI-Master Studio – bei den CAN Einstellungen
Adresse 0 Modul:170/0/1 bis 170/0/8 (EIS5 2Byte Float) Fühlereingänge170/0/9 und 170/0/10 (EIS1 1Bit) 230V~ Eingänge170/010 bis 170/0/19 (EIS14 1Byte Zählwert) Ausgänge
Modul 1: 170/1/1...Modul 2: 170/2/1...
HMI - Control
LAN
GN
D24
V +
CAN
HCA
N L
RS48
5ARS
485
B
N.C
.N
.C.
RS232SDUSB
+KN
XG
ND
Rese
tTR
M
6 TE
192.168.1.100
DA – ADAnalog
Ein- Ausg.
2TE1TE
230V~
1A1
PWR
1A41A2
Seriennr.
RS 2322-RX3-TX
5-GND
1.0000
1.0000Spannungsversorgung, Control,
DA-AD, IO mit Display
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
AI 1
AI 2
AI 3
AI 4
AI 5
AI 6
AI 7
AI 8
GN
D 1
GN
D 2
CAN
HCA
N L
N IN 1
N IN 2
N.C
.N
.O.
COM
N A7
A8
L N
Fühler 1-8
1A5
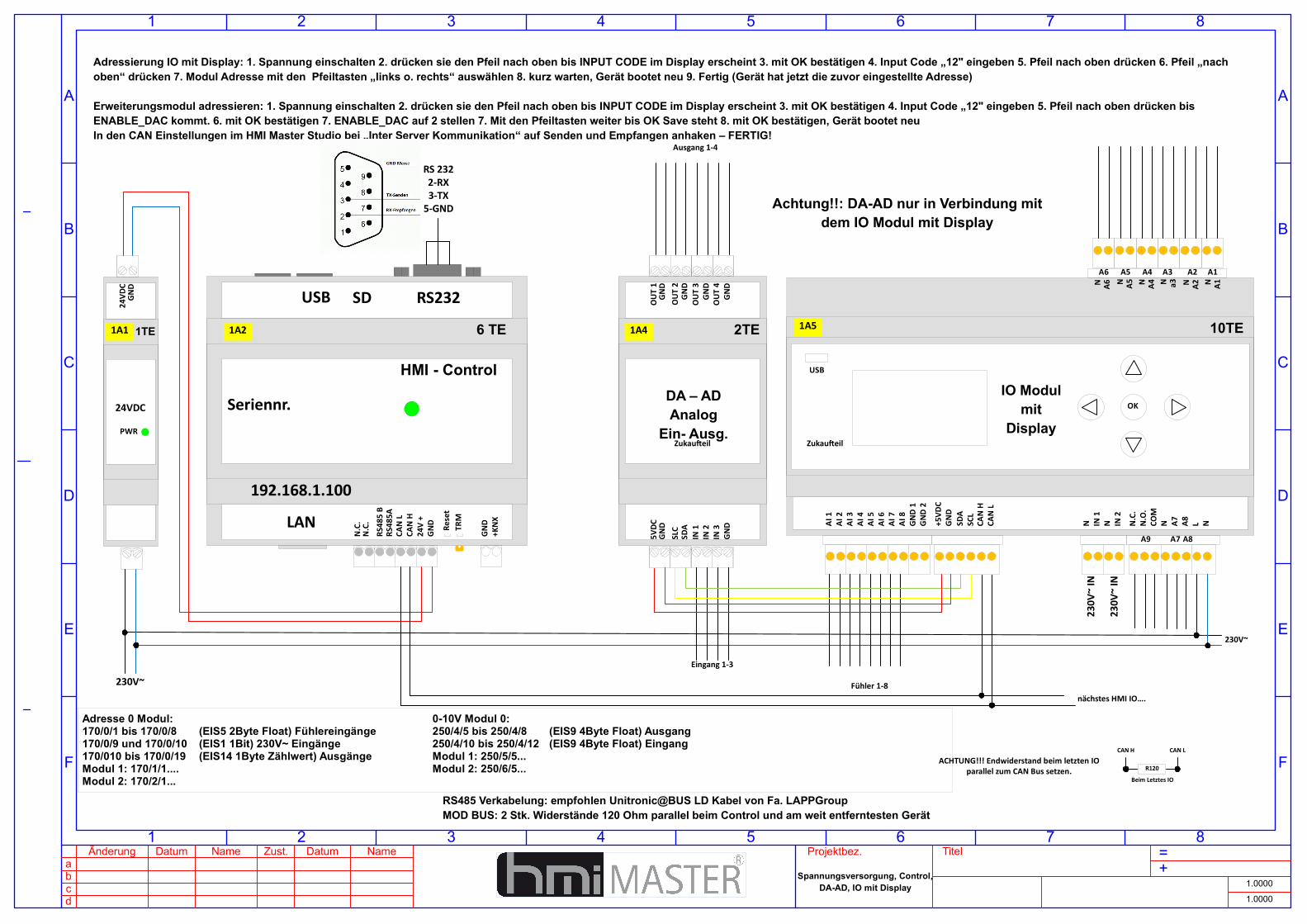
ACHTUNG!!! Endwiderstand beim letzten IO parallel zum CAN Bus setzen.
10TE
24VDC
GN
DIN
3IN
2IN
1SD
ASL
CG
ND
5VD
C
GN
DO
UT
4G
ND
OU
T 3
GN
DO
UT
2G
ND
OU
T 1
Ausgang 1-4
Eingang 1-3
GN
D24
VDC
Zukaufeil Zukaufeil
OKIO Modul
mitDisplay
Achtung!!: DA-AD nur in Verbindung mit dem IO Modul mit Display
+5VD
CG
ND
SDA
SCL
230V
~ IN
230V
~ IN
USB
A9 A7 A8
A1A2A3A4A5A6
A6N A5N A4N a3N A2N A1N
230V~
nächstes HMI IO….
R120
Beim Letztes IO
CAN H CAN L
RS485 Verkabelung: empfohlen Unitronic@BUS LD Kabel von Fa. LAPPGroupMOD BUS: 2 Stk. Widerstände 120 Ohm parallel beim Control und am weit entferntesten Gerät
Adressierung IO mit Display: 1. Spannung einschalten 2. drücken sie den Pfeil nach oben bis INPUT CODE im Display erscheint 3. mit OK bestätigen 4. Input Code „12" eingeben 5. Pfeil nach oben drücken 6. Pfeil „nach oben“ drücken 7. Modul Adresse mit den Pfeiltasten „links o. rechts“ auswählen 8. kurz warten, Gerät bootet neu 9. Fertig (Gerät hat jetzt die zuvor eingestellte Adresse)
Erweiterungsmodul adressieren: 1. Spannung einschalten 2. drücken sie den Pfeil nach oben bis INPUT CODE im Display erscheint 3. mit OK bestätigen 4. Input Code „12" eingeben 5. Pfeil nach oben drücken bis ENABLE_DAC kommt. 6. mit OK bestätigen 7. ENABLE_DAC auf 2 stellen 7. Mit den Pfeiltasten weiter bis OK Save steht 8. mit OK bestätigen, Gerät bootet neuIn den CAN Einstellungen im HMI Master Studio bei „Inter Server Kommunikation“ auf Senden und Empfangen anhaken – FERTIG!
Adresse 0 Modul: 0-10V Modul 0:170/0/1 bis 170/0/8 (EIS5 2Byte Float) Fühlereingänge 250/4/5 bis 250/4/8 (EIS9 4Byte Float) Ausgang170/0/9 und 170/0/10 (EIS1 1Bit) 230V~ Eingänge 250/4/10 bis 250/4/12 (EIS9 4Byte Float) Eingang170/010 bis 170/0/19 (EIS14 1Byte Zählwert) Ausgänge Modul 1: 250/5/5...Modul 1: 170/1/1.... Modul 2: 250/6/5...Modul 2: 170/2/1...
OU
T.6
COM
M.2
OU
T.5
OU
T.4
OU
T.3
OU
T.2
OU
T.1
COM
M.1
6 TE
HMI Master OUT 20
1TE
230V~
1A1
PWR
1A2
1.0000
1.0000HMI Master OUT 20
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
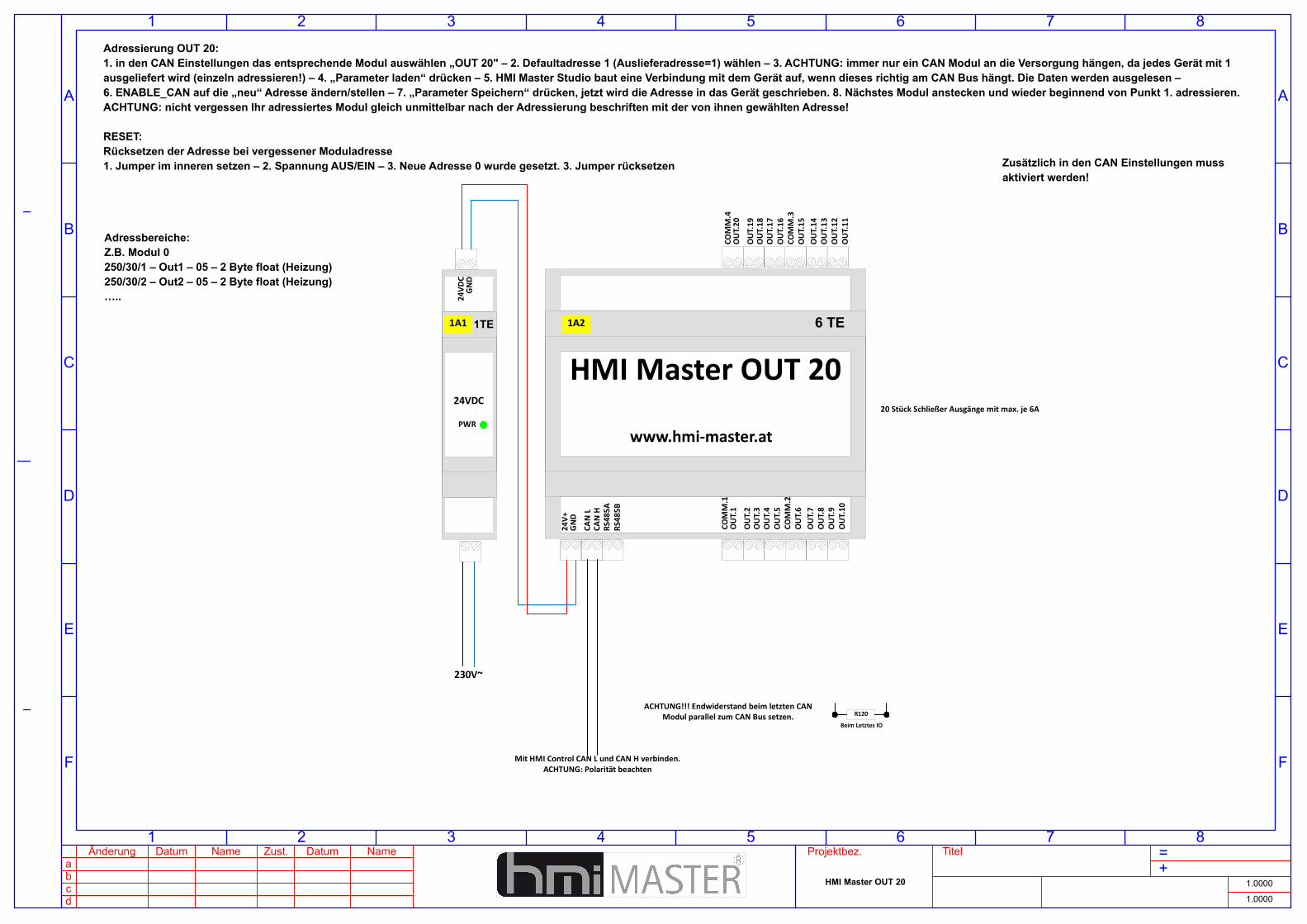
ACHTUNG!!! Endwiderstand beim letzten CAN Modul parallel zum CAN Bus setzen.
24VDC
GN
D24
VDC
R120
Beim Letztes IO
Adressierung OUT 20: 1. in den CAN Einstellungen das entsprechende Modul auswählen „OUT 20" – 2. Defaultadresse 1 (Auslieferadresse=1) wählen – 3. ACHTUNG: immer nur ein CAN Modul an die Versorgung hängen, da jedes Gerät mit 1 ausgeliefert wird (einzeln adressieren!) – 4. „Parameter laden“ drücken – 5. HMI Master Studio baut eine Verbindung mit dem Gerät auf, wenn dieses richtig am CAN Bus hängt. Die Daten werden ausgelesen – 6. ENABLE_CAN auf die „neu“ Adresse ändern/stellen – 7. „Parameter Speichern“ drücken, jetzt wird die Adresse in das Gerät geschrieben. 8. Nächstes Modul anstecken und wieder beginnend von Punkt 1. adressieren.ACHTUNG: nicht vergessen Ihr adressiertes Modul gleich unmittelbar nach der Adressierung beschriften mit der von ihnen gewählten Adresse!
RESET:Rücksetzen der Adresse bei vergessener Moduladresse1. Jumper im inneren setzen – 2. Spannung AUS/EIN – 3. Neue Adresse 0 wurde gesetzt. 3. Jumper rücksetzen
www.hmi-master.at
RS48
5BRS
485A
CAN
HCA
N L
GN
D24
V+
OU
T.10
OU
T.9
OU
T.8
OU
T.7
OU
T.15
COM
M.3
OU
T.16
OU
T.17
OU
T.18
OU
T.19
OU
T.20
COM
M.4
OU
T.11
OU
T.12
OU
T.13
OU
T.14
Mit HMI Control CAN L und CAN H verbinden.ACHTUNG: Polarität beachten
20 Stück Schließer Ausgänge mit max. je 6A
Adressbereiche:Z.B. Modul 0250/30/1 – Out1 – 05 – 2 Byte float (Heizung)250/30/2 – Out2 – 05 – 2 Byte float (Heizung)…..
Zusätzlich in den CAN Einstellungen muss aktiviert werden!
AI 8
AI 7
AI 6
AI 5
AI 4
AI 3
AI 2
AI 1
3 TE
HMI MasterIN8
Erweiterungsmodul
0-10V
1TE
230V~
1A1
PWR
1A2
1.0000
1.0000HMI Master IN8/AD4OUT
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
ACHTUNG!!! Endwiderstand beim letzten CAN Modul parallel zum CAN Bus setzen.
24VDC
GN
D24
VDC
R120
Beim Letztes IO
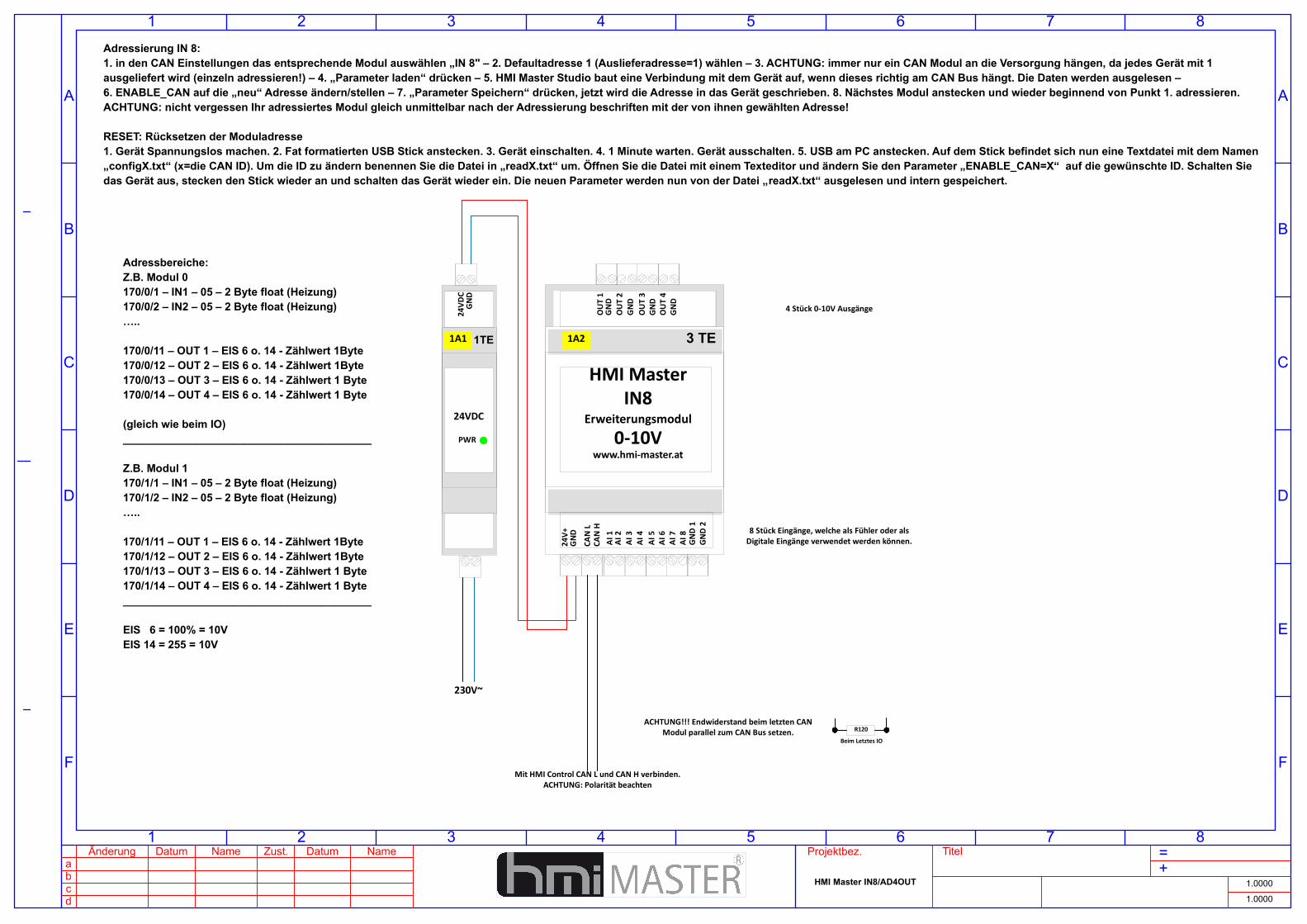
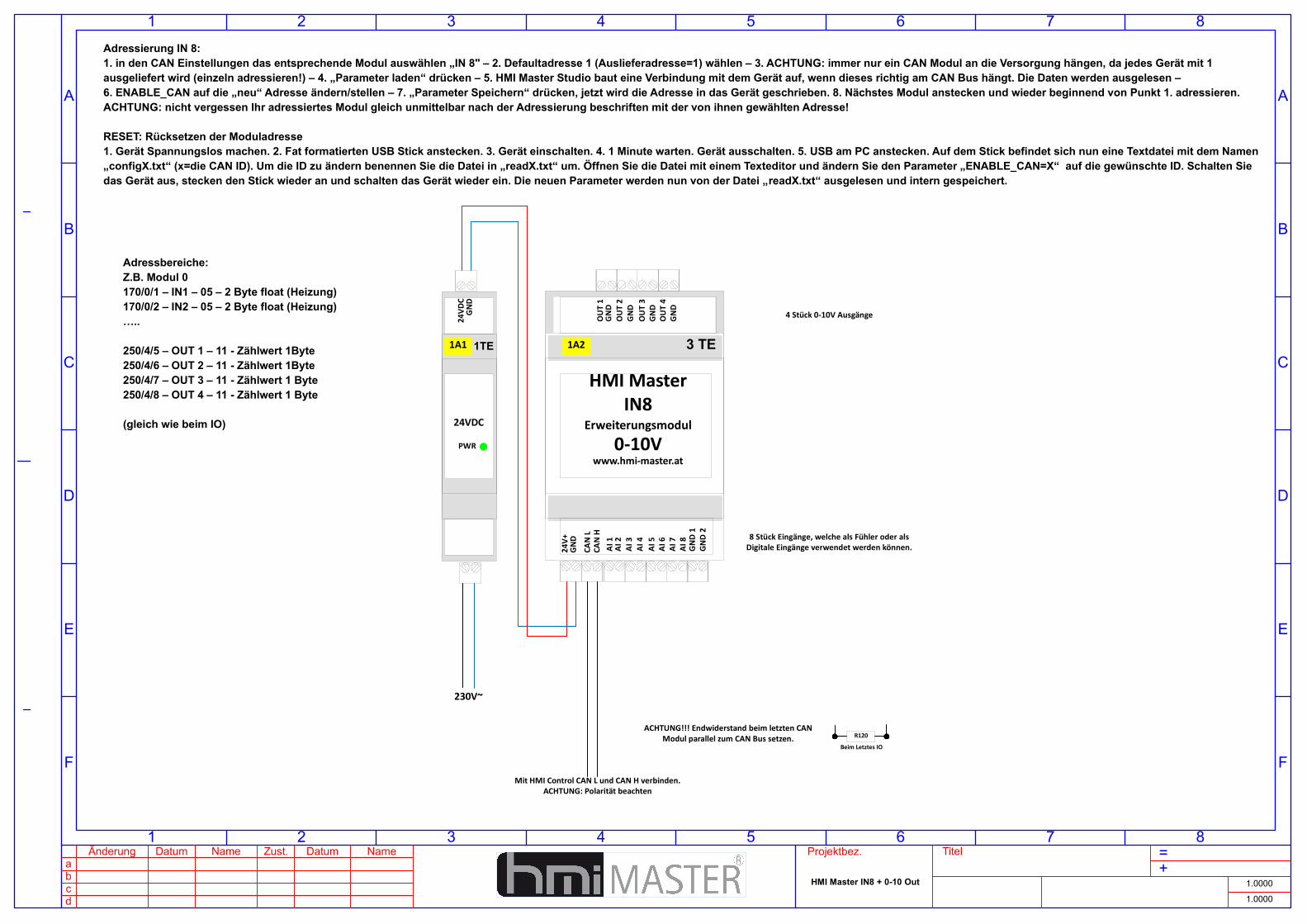
Adressierung IN 8: 1. in den CAN Einstellungen das entsprechende Modul auswählen „IN 8" – 2. Defaultadresse 1 (Auslieferadresse=1) wählen – 3. ACHTUNG: immer nur ein CAN Modul an die Versorgung hängen, da jedes Gerät mit 1 ausgeliefert wird (einzeln adressieren!) – 4. „Parameter laden“ drücken – 5. HMI Master Studio baut eine Verbindung mit dem Gerät auf, wenn dieses richtig am CAN Bus hängt. Die Daten werden ausgelesen – 6. ENABLE_CAN auf die „neu“ Adresse ändern/stellen – 7. „Parameter Speichern“ drücken, jetzt wird die Adresse in das Gerät geschrieben. 8. Nächstes Modul anstecken und wieder beginnend von Punkt 1. adressieren.ACHTUNG: nicht vergessen Ihr adressiertes Modul gleich unmittelbar nach der Adressierung beschriften mit der von ihnen gewählten Adresse!
RESET: Rücksetzen der Moduladresse1. Gerät Spannungslos machen. 2. Fat formatierten USB Stick anstecken. 3. Gerät einschalten. 4. 1 Minute warten. Gerät ausschalten. 5. USB am PC anstecken. Auf dem Stick befindet sich nun eine Textdatei mit dem Namen „configX.txt“ (x=die CAN ID). Um die ID zu ändern benennen Sie die Datei in „readX.txt“ um. Öffnen Sie die Datei mit einem Texteditor und ändern Sie den Parameter „ENABLE_CAN=X“ auf die gewünschte ID. Schalten Sie das Gerät aus, stecken den Stick wieder an und schalten das Gerät wieder ein. Die neuen Parameter werden nun von der Datei „readX.txt“ ausgelesen und intern gespeichert.
www.hmi-master.at
CAN
HCA
N L
GN
D24
V+
GN
D 2
GN
D 1
Mit HMI Control CAN L und CAN H verbinden.ACHTUNG: Polarität beachten
8 Stück Eingänge, welche als Fühler oder als Digitale Eingänge verwendet werden können.
Adressbereiche:Z.B. Modul 0170/0/1 – IN1 – 05 – 2 Byte float (Heizung)170/0/2 – IN2 – 05 – 2 Byte float (Heizung)…..
170/0/11 – OUT 1 – EIS 6 o. 14 - Zählwert 1Byte170/0/12 – OUT 2 – EIS 6 o. 14 - Zählwert 1Byte170/0/13 – OUT 3 – EIS 6 o. 14 - Zählwert 1 Byte170/0/14 – OUT 4 – EIS 6 o. 14 - Zählwert 1 Byte
(gleich wie beim IO)_________________________________________
Z.B. Modul 1170/1/1 – IN1 – 05 – 2 Byte float (Heizung)170/1/2 – IN2 – 05 – 2 Byte float (Heizung)…..
170/1/11 – OUT 1 – EIS 6 o. 14 - Zählwert 1Byte170/1/12 – OUT 2 – EIS 6 o. 14 - Zählwert 1Byte170/1/13 – OUT 3 – EIS 6 o. 14 - Zählwert 1 Byte170/1/14 – OUT 4 – EIS 6 o. 14 - Zählwert 1 Byte_________________________________________
EIS 6 = 100% = 10VEIS 14 = 255 = 10V
GN
DO
UT
4G
ND
OU
T 3
GN
DO
UT
2G
ND
OU
T 1
4 Stück 0-10V Ausgänge
AI 8
AI 7
AI 6
AI 5
AI 4
AI 3
AI 2
AI 1
3 TE
HMI MasterIN8
Erweiterungsmodul
0-10V
1TE
230V~
1A1
PWR
1A2
1.0000
1.0000HMI Master IN8 + 0-10 Out
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
ACHTUNG!!! Endwiderstand beim letzten CAN Modul parallel zum CAN Bus setzen.
24VDC
GN
D24
VDC
R120
Beim Letztes IO
Adressierung IN 8: 1. in den CAN Einstellungen das entsprechende Modul auswählen „IN 8" – 2. Defaultadresse 1 (Auslieferadresse=1) wählen – 3. ACHTUNG: immer nur ein CAN Modul an die Versorgung hängen, da jedes Gerät mit 1 ausgeliefert wird (einzeln adressieren!) – 4. „Parameter laden“ drücken – 5. HMI Master Studio baut eine Verbindung mit dem Gerät auf, wenn dieses richtig am CAN Bus hängt. Die Daten werden ausgelesen – 6. ENABLE_CAN auf die „neu“ Adresse ändern/stellen – 7. „Parameter Speichern“ drücken, jetzt wird die Adresse in das Gerät geschrieben. 8. Nächstes Modul anstecken und wieder beginnend von Punkt 1. adressieren.ACHTUNG: nicht vergessen Ihr adressiertes Modul gleich unmittelbar nach der Adressierung beschriften mit der von ihnen gewählten Adresse!
RESET: Rücksetzen der Moduladresse1. Gerät Spannungslos machen. 2. Fat formatierten USB Stick anstecken. 3. Gerät einschalten. 4. 1 Minute warten. Gerät ausschalten. 5. USB am PC anstecken. Auf dem Stick befindet sich nun eine Textdatei mit dem Namen „configX.txt“ (x=die CAN ID). Um die ID zu ändern benennen Sie die Datei in „readX.txt“ um. Öffnen Sie die Datei mit einem Texteditor und ändern Sie den Parameter „ENABLE_CAN=X“ auf die gewünschte ID. Schalten Sie das Gerät aus, stecken den Stick wieder an und schalten das Gerät wieder ein. Die neuen Parameter werden nun von der Datei „readX.txt“ ausgelesen und intern gespeichert.
www.hmi-master.at
CAN
HCA
N L
GN
D24
V+
GN
D 2
GN
D 1
Mit HMI Control CAN L und CAN H verbinden.ACHTUNG: Polarität beachten
8 Stück Eingänge, welche als Fühler oder als Digitale Eingänge verwendet werden können.
Adressbereiche:Z.B. Modul 0170/0/1 – IN1 – 05 – 2 Byte float (Heizung)170/0/2 – IN2 – 05 – 2 Byte float (Heizung)…..
250/4/5 – OUT 1 – 11 - Zählwert 1Byte250/4/6 – OUT 2 – 11 - Zählwert 1Byte250/4/7 – OUT 3 – 11 - Zählwert 1 Byte250/4/8 – OUT 4 – 11 - Zählwert 1 Byte
(gleich wie beim IO)
GN
DO
UT
4G
ND
OU
T 3
GN
DO
UT
2G
ND
OU
T 1
4 Stück 0-10V Ausgänge
AI 8
AI 7
AI 6
AI 5
AI 4
AI 3
AI 2
AI 1
3 TE
HMI MasterIN8
1TE
230V~
1A1
PWR
1A2
1.0000
1.0000HMI Master IN 8
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
ACHTUNG!!! Endwiderstand beim letzten CAN Modul parallel zum CAN Bus setzen.
24VDC
GN
D24
VDC
R120
Beim Letztes IO
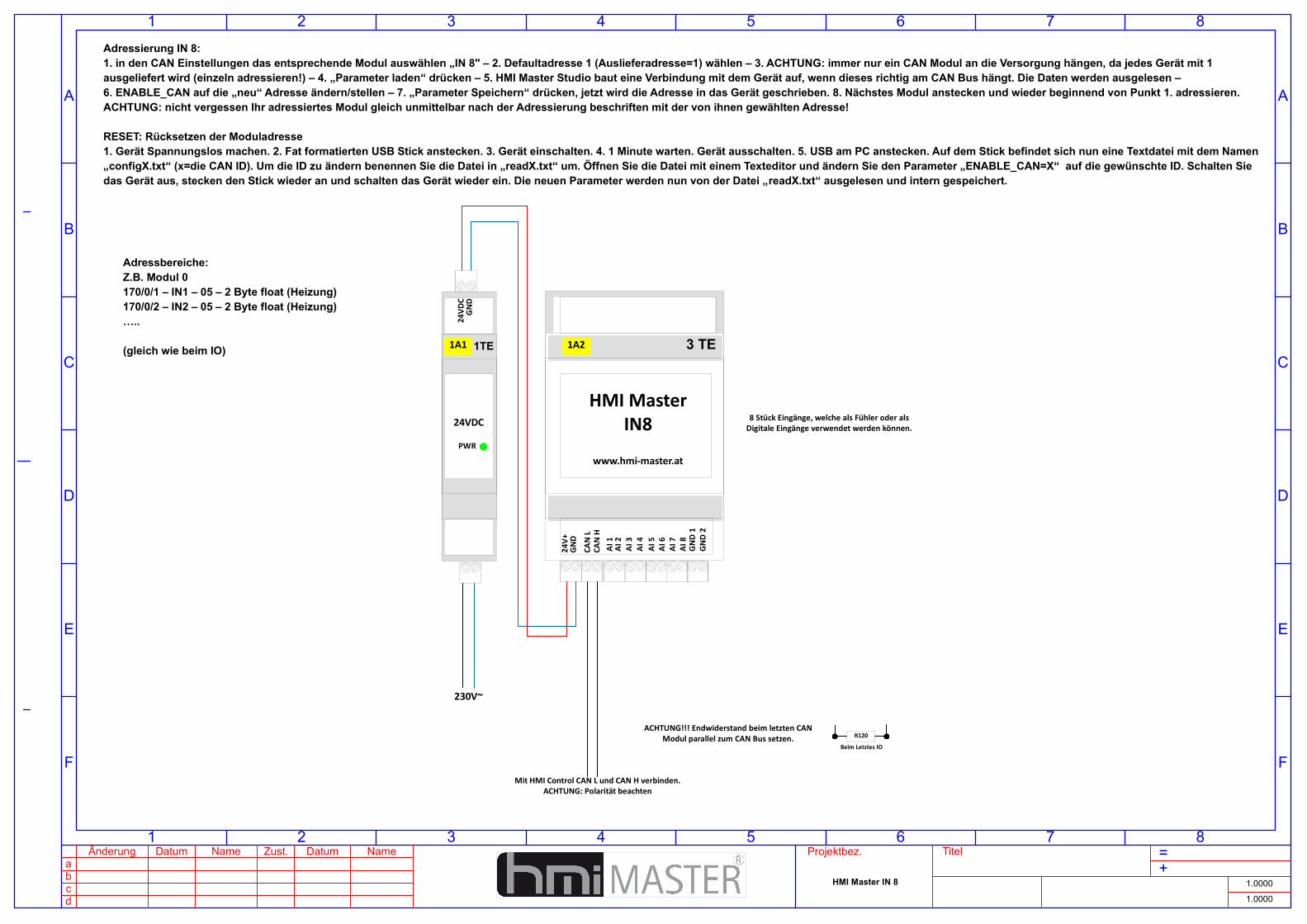
Adressierung IN 8: 1. in den CAN Einstellungen das entsprechende Modul auswählen „IN 8" – 2. Defaultadresse 1 (Auslieferadresse=1) wählen – 3. ACHTUNG: immer nur ein CAN Modul an die Versorgung hängen, da jedes Gerät mit 1 ausgeliefert wird (einzeln adressieren!) – 4. „Parameter laden“ drücken – 5. HMI Master Studio baut eine Verbindung mit dem Gerät auf, wenn dieses richtig am CAN Bus hängt. Die Daten werden ausgelesen – 6. ENABLE_CAN auf die „neu“ Adresse ändern/stellen – 7. „Parameter Speichern“ drücken, jetzt wird die Adresse in das Gerät geschrieben. 8. Nächstes Modul anstecken und wieder beginnend von Punkt 1. adressieren.ACHTUNG: nicht vergessen Ihr adressiertes Modul gleich unmittelbar nach der Adressierung beschriften mit der von ihnen gewählten Adresse!
RESET: Rücksetzen der Moduladresse1. Gerät Spannungslos machen. 2. Fat formatierten USB Stick anstecken. 3. Gerät einschalten. 4. 1 Minute warten. Gerät ausschalten. 5. USB am PC anstecken. Auf dem Stick befindet sich nun eine Textdatei mit dem Namen „configX.txt“ (x=die CAN ID). Um die ID zu ändern benennen Sie die Datei in „readX.txt“ um. Öffnen Sie die Datei mit einem Texteditor und ändern Sie den Parameter „ENABLE_CAN=X“ auf die gewünschte ID. Schalten Sie das Gerät aus, stecken den Stick wieder an und schalten das Gerät wieder ein. Die neuen Parameter werden nun von der Datei „readX.txt“ ausgelesen und intern gespeichert.
www.hmi-master.at
CAN
HCA
N L
GN
D24
V+
GN
D 2
GN
D 1
Mit HMI Control CAN L und CAN H verbinden.ACHTUNG: Polarität beachten
8 Stück Eingänge, welche als Fühler oder als Digitale Eingänge verwendet werden können.
Adressbereiche:Z.B. Modul 0170/0/1 – IN1 – 05 – 2 Byte float (Heizung)170/0/2 – IN2 – 05 – 2 Byte float (Heizung)…..
(gleich wie beim IO)
1A1
1.0000
1.0000
ÜberspannungsableiterCANSPD
A
8
B
C
765
D
E
F
8
+=
765
42 31
A
B
C
42 3
D
E
1
F
TitelProjektbez.
dcba
NameDatumZust.NameDatumÄnderung
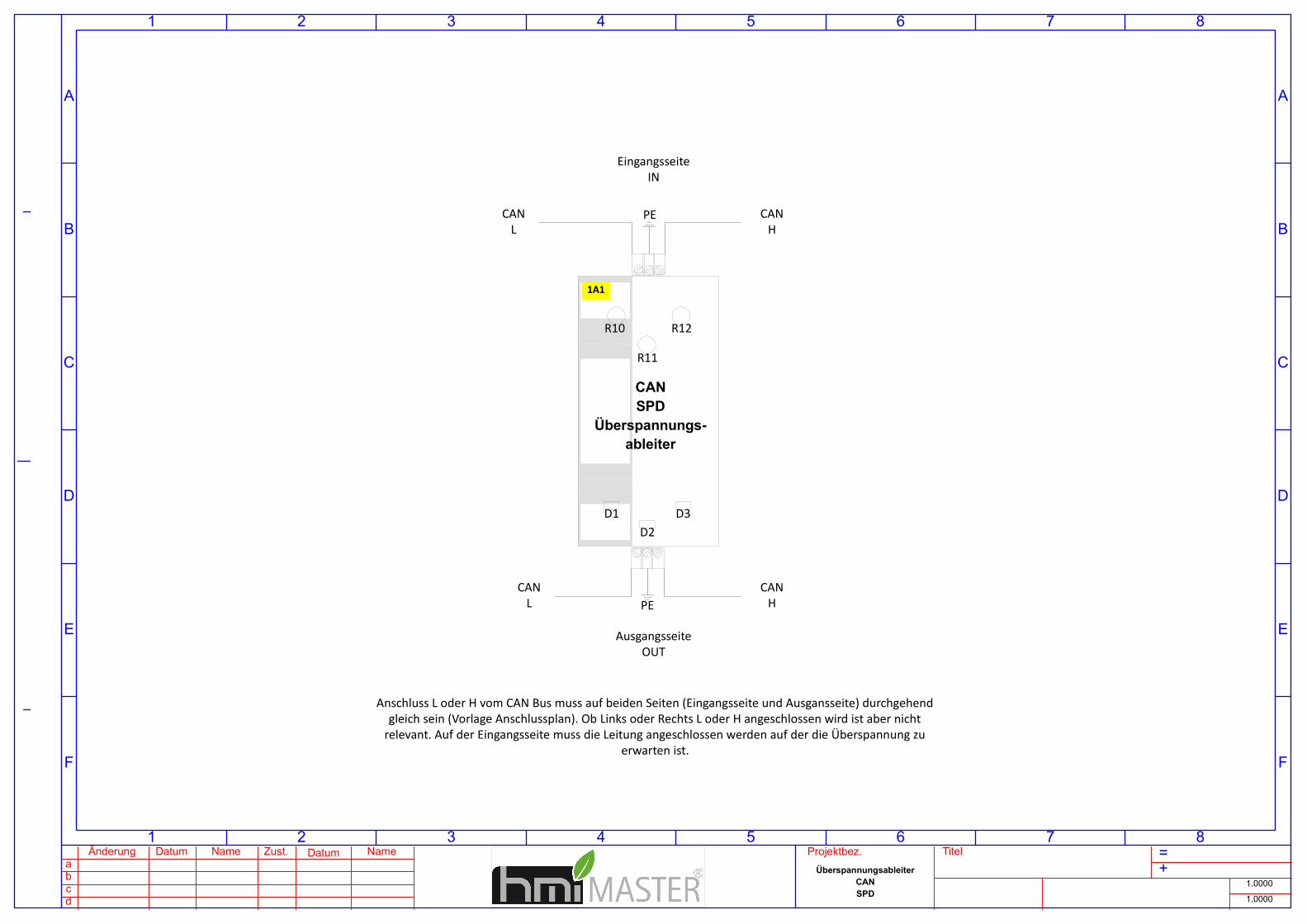
CANSPD
Überspannungs-ableiter
R10
R11
R12
AusgangsseiteOUT
EingangsseiteIN
PE
PE
D1D2
D3
CANL
CANH
CANL
CANH
Anschluss L oder H vom CAN Bus muss auf beiden Seiten (Eingangsseite und Ausgansseite) durchgehend gleich sein (Vorlage Anschlussplan). Ob Links oder Rechts L oder H angeschlossen wird ist aber nicht
relevant. Auf der Eingangsseite muss die Leitung angeschlossen werden auf der die Überspannung zu erwarten ist.



![[ Powietrze ] [ Ziemia ] - buderus-sklep.pl · •zdalne parametryzowanie •zapis parametrów •zdalne sterowanie (funkcja urlopowa) Złącza RS232 BuES LON-Gateway EIB –magistrala](https://static.fdocuments.pl/doc/165x107/5c75cccd09d3f28c0f8ba558/-powietrze-ziemia-buderus-skleppl-zdalne-parametryzowanie-zapis.jpg)