TECHNIKA SONARU BOCZNEGO
8
kmdr ppor. mgr inż. Artur GRZĄDZIEL dywizjon Zabezpieczenia Hydrograficznego MW, ORP „ARCTOWSKI” TECHNIKA SONARU BOCZNEGO W BADANIACH HYDROGRAFICZNYCH Poszukiwanie i lokalizowanie obiektów podwodnych leżących na dnie morza, a stanowiących zagrożenie dla bezpiecznej żeglugi to jedno z wielu zadań jakie powierza się między innymi państwowym służbom hydrograficznym. Do wykrywania przeszkód podwodnych wykorzystuje się różnorodne metody i rozwiązania techniczne, wśród których największym zainteresowani em, z uwagi na efektywność, cieszy się technika sonaru bocznego SSS 1 . Sonar boczny to taki rodzaj sonaru, w którym wiązka akustyczna emitowana jest w płaszczyźnie prostopadłej zarówno do kierunku ruchu jednostki pomiarowej jak i do powierzchni morza po obu stronach holowanego nośnika (opływnika). Dzisiaj sonar boczny SSS wykorzystywany jest przede wszystkim do realizacji następujących zadań: poszukiwanie i wykrywanie przeszkód podwodnych, wraków, zagubionych kotwic i innych obiektów sztucznych oraz natura lnych, leżących pomiędzy profilami sondażowymi, stanowiących zagrożenie dla żeglugi nawodnej, nawigacji podwodnej, połowów i innej działalności morskiej; kontrola czystości dna kanałów, basenów portowych, torów wodnych, red, kotwicowisk, akwenów specjalnego przeznaczenia, lokalizacja sztucznych obiektów; gromadzenie danych niezbędnych do prowadzeniach prac pogłębiarskich i hydrotechnicznych; lokalizowanie i monitorowanie podwodnych rurociągów i torów kablowych, przegląd instalacji, wykrywanie miejsc ewentua lnych uszkodzeń; identyfikowanie ruchomego podłoża morskiego, rodzaju osadów powierzchniowych i akwizycja danych o jego strukturze. Sonary boczne, stosowane w pomiarach hydrograficznych, ze względu na miejsce umieszczenia przetworników możemy podzielić zasadniczo na dwie podstawowe kategorie: burtowy sonar boczny (hull-mounted sonar); holowany sonar boczny (towed side scan sonar). 1 W literaturze można spotkać również inne anglojęzyczne nazewnictwo i pisownię odnoszące się do sonaru bocznego: Sidescan sonar, Side Scan Sonar, Side-looking sonar czy Bottom Classification Sonar. W hydrografii morskiej stosuje się nazwę „sonar boczny”, natomiast w działaniach przeciwminowych częściej operuję się określeniami takimi jak „sonar obserwacji bocznej” czy „sonar bocznego przeszukiwania”
Transcript of TECHNIKA SONARU BOCZNEGO

kmdr ppor. mgr inż. Artur GRZĄDZIEL
dywizjon Zabezpieczenia Hydrograficznego MW, ORP „ARCTOWSKI”
TECHNIKA SONARU BOCZNEGO W BADANIACH
HYDROGRAFICZNYCH
Poszukiwanie i lokalizowanie obiektów podwodnych leżących na dnie morza, a stanowiących zagrożenie dla bezpiecznej żeglugi to jedno z wielu zadań jakie
powierza się między innymi państwowym służbom hydrograficznym. Do
wykrywania przeszkód podwodnych wykorzystuje się różnorodne metody i rozwiązania techniczne, wśród których największym zainteresowaniem, z uwagi na
efektywność, cieszy się technika sonaru bocznego SSS 1.
Sonar boczny to taki rodzaj sonaru, w którym wiązka akustyczna emitowana
jest w płaszczyźnie prostopadłej zarówno do kierunku ruchu jednostki pomiarowej jak i do powierzchni morza po obu stronach holowanego nośnika (opływnika).
Dzisiaj sonar boczny SSS wykorzystywany jest przede wszystkim do realizacji
następujących zadań:
poszukiwanie i wykrywanie przeszkód podwodnych, wraków,
zagubionych kotwic i innych obiektów sztucznych oraz naturalnych,
leżących pomiędzy profilami sondażowymi, stanowiących zagrożenie
dla żeglugi nawodnej, nawigacji podwodnej, połowów i innej działalności morskiej;
kontrola czystości dna kanałów, basenów portowych, torów wodnych,
red, kotwicowisk, akwenów specjalnego przeznaczenia, lokalizacja
sztucznych obiektów;
gromadzenie danych niezbędnych do prowadzeniach prac
pogłębiarskich i hydrotechnicznych;
lokalizowanie i monitorowanie podwodnych rurociągów i torów
kablowych, przegląd instalacji, wykrywanie miejsc ewentualnych
uszkodzeń;
identyfikowanie ruchomego podłoża morskiego, rodzaju osadów
powierzchniowych i akwizycja danych o jego strukturze.
Sonary boczne, stosowane w pomiarach hydrograficznych, ze względu
na miejsce umieszczenia przetworników możemy podzielić zasadniczo
na dwie podstawowe kategorie:
burtowy sonar boczny (hull-mounted sonar);
holowany sonar boczny (towed side scan sonar).
1 W literaturze można spotkać również inne anglojęzyczne nazewnictwo i pisownię
odnoszące się do sonaru bocznego: Sidescan sonar, Side Scan Sonar, Side-looking sonar czy
Bottom Classification Sonar. W hydrografii morskiej stosuje się nazwę „sonar boczny”,
natomiast w działaniach przeciwminowych częściej operuję się określeniami takimi jak
„sonar obserwacji bocznej” czy „sonar bocznego przeszukiwania”

Pierwszy z nich, często nazywany również sonarem kadłubowym, posiada
anteny nadawczo-odbiorcze zamontowane na stałe wzdłuż prawej i lewej burty
jednostki, poniżej linii wodnej. W sonarze bocznym typu towfish przetworniki
umieszczone są w metalowym, hydrodynamicznym korpusie holowanym za rufą jednostki na specjalnym kablu. Przetworniki hydroakustyczne instaluje się także na
zdalnie kierowanych pojazdach podwodnych ROV (Remotely Operated Vehicle) lub
pojazdach z własnym, niezależnym źródłem zasilania AUV (Autonomous Underwater Vehicle). Na rys. 1 przedstawiono przykłady sonaru burtowego
i holowanego.
Rys. 1. Sonar burtowy ACSON-100 (po lewej) i sonar holowany DF-1000 (po prawej)
Najczęściej i najpowszechniej stosowany jest sonar boczny w wariancie
holowanym. Sposób ten posiada wiele zalet. Rejestrowane dane sonarowe charakteryzują się wysoką rozdzielczością. Poprzez zmniejszenie odległości
przetwornik-dno uzyskuje się maksymalny efekt powstawania zjawiska cienia
hydroakustycznego, zmniejszony wpływ oddziaływania powierzchni morza na
czytelność obrazów sonarowych oraz możliwość holowania sonaru poniżej warstwy termokliny, która powoduje odbijanie i absorpcję energii akustycznej. Ponadto
oddzielenie przetworników od kadłuba jednostki holującej spowodowało
zmniejszenie zjawiska przenoszenia ruchu platformy na zobrazowanie sonarowe. Wariant holowany nie jest pozbawiony cech ujemnych. Warto zwrócić uwagę, że
aby opuścić, holować oraz wyciągnąć „rybkę” potrzebny jest specjalny sprzęt
(żurawik, rama wychylna, kabel holujący), bez którego trudno byłoby prowadzić prace sonarowe. Ponadto operator sonaru holowanego nie jest w stanie przewidzieć
zmieniającego się w trakcie pomiarów ukształtowania dna czy obecności skał,
wraków i przeszkód naturalnych co naraża bezpośrednio sonar na poważne
uszkodzenie. Największą chyba jednak wadą jest to, iż niezwykle trudno jest dokładnie określić pozycję sonaru w płaszczyźnie horyzontalnej.
W przypadku sonaru bocznego, którego przetworniki zamocowane są na stałe
w poszyciu kadłuba określenie dokładnej pozycji obiektu podwodnego nie stanowi problemu. Wynika to bowiem z faktu znajomości pozycji zamontowania anten
nadawczo-odbiorczych sonaru. Niestety dość istotną wadą sonarów burtowych jest
mniejsza zdolność rozdzielcza systemu sonarowego z uwagi na odległość przetwornik-dno oraz geometrię rozchodzącego się impulsu akustycznego. Dlatego

optymalne parametry pracy sonarów burtowych uzyskuje się zasadniczo
w akwenach płytkowodnych [1].
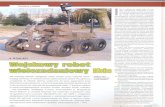
Podstawowe elementy systemu sonaru bocznego to nośnik przetworników
hydroakustycznych („rybka”), urządzenie rejestracji i archiwizacji danych oraz kabel łączący wymienione komponenty. Rys. 2 ilustruje uproszczony schemat
systemu sonarowego na wyposażeniu jednostek hydrograficznych dywizjonu
Zabezpieczenia Hydrograficznego Marynarki Wojennej (dZHMW).
Rys. 2. Podstawowa konfiguracja holowanego sonaru bocznego
W przypadku konwencjonalnych analogowych systemów sonarowych długość
kabla jest czynnikiem limitującym działanie urządzeń na głębszych akwenach.
EdgeTech model DF-1000, korzystając z technologii cyfrowej komunikacji,
zapewnia uzyskiwanie obrazów o wysokiej rozdzielczości przy głębokościach przekraczających możliwości systemów analogowych. Można wykorzystywać go
zarówno na głębokich jak i płytkich akwenach. Dodatkową korzyścią jest to, że
w zestawie wykorzystuje się jedynie pojedynczy, współosiowy kabel kevlarowy. Spełnia on rolę siły holującej, zasilania oraz zapewnia dwukierunkową
komunikację. Cyfrowe połączenie komunikacyjne z pokładowym komputerem
umożliwia równoczesną transmisję zarówno danych standardowej częstotliwości
(100 kHz) jak i danych wysokiej rozdzielczości (500 kHz)2. Elementem
odpowiedzialnym za rejestrację, archiwizację i zobrazowanie danych sonarowych
jest system DA-50 firmy CODA Technologies Ltd. Zapisuje on dane na dysku
twardym, które można odtworzyć w procesie obróbki i przetwarzania. „Rybka” holowana na 200 metrowym kablu emituje wiązkę akustyczną, wąską
2 Rzeczywista częstotliwość operacyjna kanału wysokiej rozdzielczości wynosi 390 kHz
( 20 kHz). Producent w dokumentacji technicznej posługuje się zwrotem „500 kHz” dla
potrzeb określenia danych wysokiej rozdzielczości.

w płaszczyźnie poziomej (0.5°-2°) i szeroką w płaszczyźnie pionowej, rzędu
40°-50° [2]. Impulsy rozchodzą się w kierunku prostopadłym do ruchu jednostki
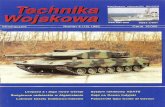
pomiarowej. W przypadku modelu DF-1000 dla częstotliwości 500 kHz rozwartość
kątowa wiązki wynosi 50° x 0.5°. Rys. 3 przedstawia kształt charakterystyki promieniowania przetworników sonaru w obu płaszczyznach.
Rys. 3. Charakterystyka promieniowania holowanego sonaru bocznego EdgeTech
DF-1000 (a) w płaszczyźnie pionowej, (b) w płaszczyźnie poziomej. [Źródło: materiał uzyskany od pracownika EdgeTech (USA) p.Chuck Harding,
Dzięki tak ukształtowanej wiązce sonar boczny posiada zdolność do zobrazowania i rozróżniania obiektów podwodnych o niewielkich rozmiarach.
Możliwości rozdzielcze sonaru bocznego zależą w głównej mierze od zastosowanej
częstotliwości pracy urządzenia. Typowe częstotliwości operacyjne sonarów bocznych wykorzystywanych w pomiarach hydrograficznych mieszczą się
w zakresie 100-500 kHz. Im wyższa częstotliwość sygnału, tym sonar boczny
posiada większą rozróżnialność, dochodzącą nawet do kilku centymetrów. Niestety
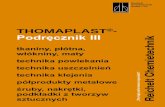
skuteczny zasięg działania jest wówczas znacznie ograniczony do max 75-150 m. Sonary niskiej częstotliwości (100 kHz) cechuje duży zasięg działania (200-300 m
na jeden przetwornik), ale kosztem zmniejszonej rozdzielczości zobrazowania [3].
Na rys. 4 pokazano różnicę w zobrazowaniu tego samego obiektu w kanale niskiej i wysokiej rozdzielczości.
Rys. 4. Wrak trałowca na dnie Zatoki Puckiej, a) dane 100 kHz, b) dane 500 kHz

Zasada pracy sonaru polega na pomiarze czasu od momentu wysłania impulsu
do momentu odebrania sygnału odbitego od dna (wraku) oraz rejestracji amplitudy
odebranych impulsów. Natężenie powracających do przetwornika sygnałów zależy
w głównej mierze od zróżnicowania i budowy dna morskiego. Obiekty podwodne o dobrych właściwościach akustycznych, takie jak skały, obiekty metalowe, drobne
zmarszczki piaskowe będą źródłem wyraźnych ech na zarejestrowanych obrazach
sonarowych (sonogramach). Intensywność zapisu akustycznych obrazów dna jest ponadto funkcją fizycznego kształtu elementarnych cząstek materiałów oraz kąta
nachylenia powierzchni opromieniowanych wiązką sonarową.
Interpretacja obrazów sonarowych dla „młodych” operatorów stanowi nie lada wyzwanie. Znajomość geometrii zastosowanej w sonarze bocznym przybliża
w pewnym stopniu tematykę powstawania i analizowania obrazów generowanych
przez sonar. Korpus sonaru zawierający przetworniki holowany jest na pewnej
głębokości pod powierzchnią morza. Nadanie impulsu hydroakustycznego stanowi czas początkowy (zerowy) dla procesu formowania obrazu sonarowego. Sonar
mierzy i wyświetla odległości obiektów (wraków, głazów, kotwic) od przetwornika,
który jest punktem odniesienia przy określaniu ich pozycji. Impuls nadawczy to bardzo silny sygnał generujący na sonogramie
3 ciągłą linię (linia zerowa). Następnie
wyróżniamy przedział czasu, podczas którego impuls rozprzestrzenia się
w kolumnie wody co oznacza, że żadne echo nie powraca do układu odbiorczego. Ten przedział czasu będzie zobrazowany w postaci białej strefy po obu stronach linii
zerowej.
Przykład obrazu sonarowego przedstawia rys. 5.
Rys. 5. Charakterystyka elementów obrazu sonarowego
3 Sonogram (z ang. sonar image, sonar record, sonograph) – obraz sonarowy w postaci
cyfrowej lub zapisu graficznego na papierze termicznym, przedstawiający dno, wszystkie
obiekty znajdujące się w polu widzenia wiązki akustycznej oraz typowe cechy
charakterystyczne dla każdego sonogramu.

W zależności od tego gdzie w kolumnie wody znajduje się sonar, pierwsze
echo może być odbiciem od dna bezpośrednio pod sonarem lub odbiciem od
powierzchni wody. Wiązka sonarowa, dzięki swojemu kształtowi i charakterystyce
kierunkowości, dociera do powierzchni wody oraz pionowo w dół do dna. Na rys. 5 sonar znajduje się bliżej powierzchni morza zatem ciągła linia równoległa do linii
zerowej jest niczym innym jak odbiciem od powierzchni wody. Następnie dochodzi
echo odbite od dna (linia dna), po którym docierają kolejne odbicia wyświetlane z odpowiednią intensywnością na odległości odpowiadającej czasowi przebiegu
sygnału. Warto zauważyć, iż są to odległości skośne (slant ranges) i nie reprezentują
rzeczywistych odległości horyzontalnych. Obiekty wystające powyżej płaszczyzny dna uniemożliwiają fali akustycznej dotarcie do strefy bezpośrednio za danym
obiektem, powodując jednocześnie tworzenie się cienia akustycznego. Szczegółowa
analiza kształtów cieni pomocna jest w określaniu fizycznego stanu obiektu.
To dzięki cieniom możliwe jest obliczenie wysokości obiektu nad dnem. Tor rozchodzenia się promieni akustycznych w środowisku wodnym jest
względnie prosty. Przy wykryciu obiektu geometria sonaru tworzy dwa trójkąty
podobne, w których boki jednego są proporcjonalne do odpowiednich boków drugiego trójkąta. Dzięki tym proporcjom możliwe jest oszacowanie wysokości
obiektu nad dnem oraz głębokości minimalnej nad obiektem [4]. Kratery, rowy, doły
i inne depresje to częste formy ukształtowania dna, na które można natrafić prowadząc trałowanie hydroakustyczne. Powstały one w skutek działalności
ludzkiej bądź w wyniku oddziaływania środowiska zewnętrznego. Te formy
geomorfologiczne dostarczają charakterystycznych ech, które stanowią czasami
problem w interpretacji. Rysunek 6 przedstawia sposób interpretacji obrazu sonarowego z typowym zagłębieniem dennym.
Klasyczne rejestratory danych sonarowych wykorzystujące skalę szarości
zobrazowują na papierze silne i wyraźne odbicia w postaci punktów (obszarów) ciemnych czy nawet czarnych a całkowity brak energii powracającej do sonaru jako
pola jaśniejsze (białe). Nowoczesne systemy sonarowe umożliwiają uzyskanie
zjawiska odwrotnego poprzez implementację rozmaitych „sztucznych” kolorów
w zależności od „siły” odbicia sygnału. Mają one możliwość tzw. „sztucznego koloryzowania danych” aby zwiększyć możliwości interpretacji i zrozumienia
obrazu. Chociaż współczesne procesory sonarowe są w stanie fałszywie
koloryzować dane przy użyciu szerokiej palety barw, większość operatorów sonarów preferuje zobrazowanie w tradycyjnej skali szarości (czarne na białym)
bądź w odcieniach piaskowych [5].
Prawie wszystkie systemy obrony przeciwminowej wykorzystują w pierwszej kolejności sonary w celu wykrycia „podejrzanych obiektów” a potem
ich klasyfikacji. Dzięki swoim możliwościom technicznym holowane sonary boczne
stanowią dzisiaj nieocenioną pomoc w działaniach okrętów podwodnych,
operacjach amfibijnych oraz pełnią istotną rolę w procesie realizacji zadań obrony przeciwminowej [6].

Rys. 6. Interpretacja sonogramu z typowym zagłębieniem w dnie
BIBLIOGRAFIA
1. ANDREW C., YOUNG A., Setup and Troubleshooting Procedures for the Klein 5500
Sidescan Sonar, Australian Department of Defence, Maritime Operation Division,
DSTO-GD-0372
2. MAZEL CH., Side Scan Sonar Training Manual, Klein Associates, Inc. 1985
3. PENROSE J.D., SIWABESSY P.J.W., GAVRILOV A., PARNUM I., HAMILTON
L.J., BICKERS A., BROOKE B., RYAN A., KENNEDY P., Acoustic Techniques for
Seabed Classification, Technical Report 32, Cooperative Research Centre for Coastal
Zone Estuary and Waterway Management, Australia, September 2005., s. 49
4. SIDE-SCAN SONAR for inspecting coastal structures, Coastal Engineering Technical Note. CETN-III-16, Revised 11/83. Coastal Engineering Research Center, Mississippi
39180
5. GRZĄDZIEL A., Geometria sonaru bocznego – klucz do zrozumienia i interpretacji
obrazów sonarowych, Przegląd Morski nr 7-8, Gdynia 2004
6. LCDR JOHNSON P., Seafloor classification and feature detection [w] “Manual on
Hydrography. Publication M-13”, International Hydrographic Bureau, Monaco 2005