System e Automat is e

of 150
-
Upload
youssef-elalaoui -
Category
Documents
-
view
221 -
download
0
Transcript of System e Automat is e
-
8/14/2019 System e Automat is e
1/150
-
8/14/2019 System e Automat is e
2/150
Docum en t lab orpar :
Nom et prnom EFP DR
EZZAIM Noureddine ISTA H. SALAM SALE DRNOI
Rvision linguistique---
Validation---
-
8/14/2019 System e Automat is e
3/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
3
MODULE 29 : SYSTME AUTOMATIS CONTRL PAR API
Code : Dure : 90 h
OBJECTIF OPRATIONNEL DE PREMIER NIVEAUDE COMPORTEMENT
COMPORTEMENT ATTENDU
Pour dmontrer sa comptence le stagiaire doitinstaller et rparer un systme automatis contrl par APIselon les conditions, les critres et les prcisions qui suivent.
CONDITIONS DVALUATION
Travail individuel. Sur un systme automatis lectropneumatique ou lectrohydraulique,
fonctionnel et contrl par automate programmable avec E/S tout ou rien . partir dune panne provoque. laide :
- de directives et des plans du systme;- de programmes en diagramme chelon, en Grafcet ou en Basic;
- de manuels du fabricant et du Code de llectricit;- des outils et des instruments appropris;- de composants de remplacement.
CRITRES GNRAUX DE PERFORMANCE
Respect des rgles de sant et de scurit au travail. Respect des normes en vigueur. Prcision du travail.
Utilisation adquate des outils et des instruments. Travail soign et propre. Rsultat : fonctionnement du systme selon les spcifications.
-
8/14/2019 System e Automat is e
4/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
4
( suivre)
OBJECTIF OPRATIONNEL DE PREMIER NIVEAUDE COMPORTEMENT(suite)
PRCISIONS SUR LECOMPORTEMENT ATTENDU
A. Prendre connaissance des directives, desplans et des manuels techniques.
B. Installer les quipements.
C. Analyser ltat rel de lquipement.
D. Poser un diagnostic.
E. Changer ou rparer le composantdfectueux.
F. Rgler les paramtres de fonctionnement.
G. Vrifier le fonctionnement de lquipement.
H. Consigner les interventions.
CRITRES PARTICULIERSDE PERFORMANCE
- Interprtation exacte des symboles et desconventions du plan.
- Reprage de linformation pertinente dansles manuels techniques.
- Exactitude de la terminologie.
- Installation conforme la mthode et au
plan.
- Vrification minutieuse et complte delquipement.
- Exactitude des mesures releves : tension; courant; rsistance.
- Justesse de la comparaison de ltat rel ltat de rfrence de lquipement.
- Justesse du diagnostic.- Indication valable du phnomne
destructeur.- Choix judicieux des correctifs apporter.
- Choix appropri du composant deremplacement.
- Dmontage et montage prcis.- Mise en place correcte et solidit des
composants de remplacement.
- Rglage fonctionnel des paramtres.
- Prise en considration des spcificationsde fonctionnement.
- Mise en marche approprie et scuritairede lquipement.
- Fonctionnement appropri : des dispositifs de commande; des dispositifs de protection.
- Concision et pertinence de linformationprsente.
-
8/14/2019 System e Automat is e
5/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
5
OBJECTIFS OPRATIONNELS DE SECOND NIVEAU
LE STAGIAIRE DOIT MATRISER LES SAVOIRS, SAVOIR-FAIRE, SAVOIR PERCEVOIR OU SAVOIR TREJUGS PRALABLES AUX APPRENTISSAGES DIRECTEMENT REQUIS POUR LATTEINTE DE LOBJECTIF DEPREMIER NIVEAU, TELS QUE :
Avant dapprendre prendre connaissance des directives, des plans et des manuelstechniques (A) :
1. Expliquer le fonctionnement dun systme automatis.2. Dcrire les squences de chaque mouvement dun systme automatis.3. Interprter des schmas, des plans et des devis.
Avant dapprendre installer les quipements (B) :
4. Identifier les normes en vigueur au regard de linstallation dun systme automatis.5. Expliquer les mthodes dinstallation.6. Reconnatre les mesures de scurit prendre lors de linstallation.
7. Installer des cbles et des canalisations.
Avant dapprendre analyser ltat rel de lquipement (C) :
8. Analyser un circuit c.c.9. Analyser un circuit c.a.10. Analyser des circuits semi-conducteurs.11. Appliquer des notions de logique combinatoire.12. Appliquer des notions de logique squentielle.13. Utiliser un automate programmable.14. Analyser des circuits pneumatiques.
15. Analyser des circuits hydrauliques.16. Dfinir les tapes de mise en marche et darrt du systme.17. Utiliser lautomate programmable en mode TEST .
Avant dapprendre poser un diagnostic (D) :
18. Interprter linformation obtenue par lautomate programmable.19. Rparer le composant dfectueux.20. Dceler les pannes par la vue, lodorat, loue et le toucher.21. valuer prospectivement le temps dune rparation.
-
8/14/2019 System e Automat is e
6/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
6
( suivre)
OBJECTIFS OPRATIONNELS DE SECOND NIVEAU
LE STAGIAIRE DOIT MATRISER LES SAVOIRS, SAVOIR-FAIRE, SAVOIR PERCEVOIR OU SAVOIR TREJUGS PRALABLES AUX APPRENTISSAGES DIRECTEMENT REQUIS POUR LATTEINTE DE LOBJECTIF DEPREMIER NIVEAU, TELS QUE :
Avant dapprendre changer ou rparer le composant de dfectueux (E) :
22. Effectuer des oprations dusinage manuel.23. Effectuer des oprations dusinage sur machines-outils.24. Appliquer des techniques doxycoupage et de soudage larc lectrique.25. Slectionner les composants de remplacement.26. Appliquer des mthodes dalignement conventionnel.27. Appliquer des techniques de gestion de la maintenance.28. Expliquer limportance de la qualit dans lexcution des travaux.
Avant dapprendre consigner les interventions (H) :
29. Utiliser un micro-ordinateur pour produire des documents techniques.30. Utiliser la terminologie approprie.31. Expliquer limportance de la propret et du soin porter aux aires de travail, aux
outils et lquipement.
-
8/14/2019 System e Automat is e
7/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
7
-
8/14/2019 System e Automat is e
8/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
8
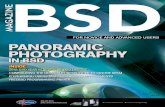
Traiter les informationsentrantes pour mettre des
ordres de sorties en fonctiondun programme.
L'Automate Programmable Industriel
Dfinition
Un Automate Programmable Industriel (API) est une machinelectronique programmable par un personnel non informaticien etdestin piloter en ambiance industrielle et en temps rel desprocds ou parties opratives.
Structure gnrale
Bornier dessorties
Alimentationcapteurs
Alimentationgnrale
Bornier desentres
MmoireEPROM ouEEPROM
Visualisation tat
des entres/sorties
Visualisation tatautomate
Communication
Batterie
Informations(capteurs, dialogue)
Entres
SortiesOrdres
ractionneurs, dialo ue
Programme
Un automate programmable est adaptable unmaximum dapplication, dun point de vue traitement,composants, language.Cest pour cela quil est de construction modulaire.
-
8/14/2019 System e Automat is e
9/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
9
Principe de fonctionnementLe traitement lieu en quatre phases :Phase 1 : Gestion du systmeAutocontrle de lautomatePhase 2: Acquisition des entres
Prise en compte des informations du moduledentres et criture de leur valeur dansRAM (zone DONNEE).Phase 3: Traitement des donnesLecture du programme (situe dans la RAM
programme) par lunit de traitement, lecturedes variables (RAM donnes), traitement etcriture des variables dans la RAMdonnes.Phase 4: Emissions des ordresLecture des variables de sorties dans la RAM donnes et transfert vers le module de sorties.
Caractristiques techniquesLes caractristiques principales dun API sont :Compact ou modulaireTension dalimentationTaille mmoireTemps de scrutation
Sauvegarde (EPROM, EEPROM, pile, )Nombre dentres / sortiesModules complmentaires (analogique, communication,..)Langage
UnitCentraleL'unit centrale est le regroupement du processeur et de la mmoire centrale. Elle commande l'interprtation et l'excutiondes instructions programmes. Les instructions sont effectues les unes aprs les autres, squences par une horloge.
Exemple: Si deux actions doivent tre simultanes, l'API les traite successivement.Caractristiques principales:- Vitesses de traitement : C'est la vitesse de l'UC pour excuter 1 K-instructions logiques. (10 20 ms/Kmots).- Temps de rponse : scrutation des entres, vitesse de traitement et affectation des sorties .
MmoireDeux types de mmoire cohabitent :
La mmoi re Langageo est stock le langage de programmation. Elle est en gnral fig, c'est dire en lectureseulement. (ROM : mmoire morte)
La mmoi re Tr avai l utilisable en lecture-criture pendant le fonctionnement cest la RAM (mmoire vive).Attribution des zones mmoire travail en RAM
Nature des Inform. Dsignations Exploitation Zones MmoiresEtats des Capteurs Variable d'entre
Ordres aux practionneurs Variable de sortieRsultats de fonctions
comptage, tempo...
Rsultats intermdiaires
Variable Interneet / ou
Variable mot
Evolution de leurvaleur en fonction
du droulementdu cycle
Zonemmoire
des Donnes
Instructions du cycle Programmedans l'API
Ecrit 1 fois et lu chaquescrutation
Zone mmoirePROGRAMME
Sauvegarde :
Sauvegarde de la RAM(programmes, configuration, donnes)
Sauvegarde Externe(programme, configuration)
1 heure minimum par pile interne 1an par pile externe permanente par EPROM (effaable parultraviolet), EEPROM (effaable parcourant lectrique)....
Bus Entres / Sorties
Unit deTraitement
RAM
Moduledes
Entres
Moduledes
Sorties
-
8/14/2019 System e Automat is e
10/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
10
Le transfert de lEPROM ou EEPROM vers la mmoire RAM de lautomate, seffectue chaque reprise secteur et si lecontenu de celle-ci est diffrent.
Les Modules Entres - Sor tiesModule dextension dEntres/Sorties TOR
Module rseau : communication entre automate
Module dextension dEntres Analogiques 0-10V Module
dextension de Sorties Analogiques 0-10V
1.1.1 Branchement des Entres TORLe principe de raccordement consiste envoyer un signal lectrique vers l'entre choisie sur l'automate ds quel'information est prsente.L'alimentation lectrique peut tre fourni par l'automate (en gnral 24V continu) ou par une source extrieure.Un automate programmable peut tre logique positive ou ngative.
Logique positive Logique ngative
Le commun interne des entres est reli au 0V
1 2 3 4 5
AUTOMATE PROGRAMMABLE
En tr es
Al imentat ionCapteurs
Ov 24v
EX : l'API TSX 17 fonctionne exclusivement en logiquepositive (pour mettre une entre automate au 1 logique, ilfaut lui imposer un potentiel de +24 Volts ).
Le commun interne des entres est reli au 24V
1 2 3 4 5
AUTOMATE PROGRAMMABLE
En tr es
Al imentat ionCapteurs
Ov 24v
EX : l'API PB15 fonctionne exclusivement en logiquengative (pour mettre une entre automate au 1 logique, ilfaut lui imposer un potentiel de -0 Volts ).
1 2 3 4 5
AUTOMATE PROGRAMMABLE
En tres
Ov 24v
1s0
dcy
1 2 3 4 5
AUTOMATE PROGRAMMABLE
En tres
Ov 24v
1s0
dcy
Les dtecteurs 3 fils ou lectronique sont de deux types PNPouNPN.
Dtecteur PNP
pour automate logique PositiveDtecteur NPN
Pour automate logique Ngative
Lorsque qu'il y a dtection, le transistor est passant(contact ferm). Il va donc imposer le potentiel +sur la
sortie S . La charge est branche entre la sortie Set lepotentiel -. Ce type de dtecteur est adapt aux units de
Lorsque qu'il y a dtection, le transistor est passant(contact ferm). Il va donc imposer le potentiel -sur la
sortie S . La charge est branche entre la sortie S et lepotentiel +. Ce type de dtecteur est adapt aux units de
-
8/14/2019 System e Automat is e
11/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
11
traitement qui fonctionnent en logique positive. traitement qui fonctionnent en logique ngative.
Pour un automate programmable la charge reprsente l'entre
1.1.2 Branchement des sortiesLe principe de raccordement consiste envoyer un signal lectrique vers le practionneur connect la sortie choisie del'automate ds que l'ordre est mis.
L'alimentation lectrique est fournie par une source extrieure l'automate programmable.
1 2 3 4 5 6
AUTOMATE PROGRAMMABLE
Sorties
commun
Sorties
220V ac 24V ac
-
+
1C
1D+ 1D- KM
-
8/14/2019 System e Automat is e
12/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
12
Terminaux de programmati on et de rglageL'API doit permettre un dialogue avec :
Le personnel d'tude et de ralisation pour raliser la premire mise en oeuvre ( Edition programme, Transfert,Sauvegarde...)
Le personnel de mise au point et de maintenance de raliser des oprations sur le systme ( Forage,Visualisation de l'tat, Modification de paramtres temporisation, compteurs....)
Ce dialogue peut tre ralis par :Une Console : Elle sera utilise sur site. Elle comporte un clavier, un cran de visualisation et le langage de
programmation.Un Micro-ordinateur avec un logiciel d'assistance la programmation : Il sera utilis hors site. Il comprend
plusieurs modules pour permettre l'dition, l'archivage, la mise au point des applications.
Mise en oeuvre
Prparation
La Partie Oprative du systme, les grafcets de Production Normale, le Dialogue, le GEMMA (Modes de Marches etd'Arrts), les GRAFCET de Scurit et de Conduite tant dfinis, il reste dfinir la Partie Commande.Si le choix se porte sur un automate programmable, celui-ci tant reli aux practionneurs (affectation Entres/ Sorties) etayant son propre langage de programmation, il faut traduire les GRAFCET prcdents en un programme.
Tracer les GRAFCET adapts l'automateprogrammable.
Remplacer les rceptivits et les actions par lesaffectations des variables d'Entres/Sorties Modifier les structures GRAFCET si ncessaire enfonction des possibilits du langage de programmation. Prparer la programmation pour les temporisations, lescompteurs, les mmorisations d'action etc.. en respectantla syntaxe du langage de programmation.
Ecrire les quations de sorties Recherche des conditions d'excution des actions dansl'ensemble des grafcets et des quat ions logiques
Noter ltat initial des variables Etapes actives au dmarrage, mots de donnes pourtempo ou compteur)
Ecrire le programme. Il existe 2 possibilits d'dition de Programme: Ecrire le programme directement dans le langage
programmable sur feuille de programmation. (Ex: Langagelittral boolen ou GRAFCET PB15 ou LangageGraphique Schma contact ou GRAFCET PL7-2 pourconsole TSX). Ecriture de l'ossature GRAFCET et desrceptivits, puis des quations de sorties. Utiliser un logiciel d'assistance la Programmation(
en gnral GRAPHIQUE )exemple AUTOMGEN
REMARQUE:Le logiciel AUTOMGEN permet l'dition graphique proche des grafcets, puis l'affectation desentres/sorties, la gnration du programme pour lautomate concern, la simulation du programme, le transfert et lasupervision de son excution.
-
8/14/2019 System e Automat is e
13/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
13
Transfer t du programme dans l ' automate programmableLe transfert du programme peut tre fait soit :
manuellement en entrant le programme et l'tat initial l'aide d'une console de programmationautomatiquement en transfrant le programme l'aide du logiciel d'assistance, et en ralisant la liaison srie
entre l'ordinateur et l'automate.
Vrif ication du fonctionnementLors de sa premire mise en oeuvre il faut raliser la mise au point du systme.
Prendr e connai ssance du systme (dossier technique, des grafcets et du GEMMA, affectation des entres / sorties,les schmas de commande et de puissance des entres et des sorties).
Lancer l ' excut ion du pr ogramme (RUN ou MARCHE)
Visual iser l 'tat des GRAFCET, des var iabl es...
Il existe deux faons de vrifier le fonctionnement :
En simulation (sans Partie Oprative).En condition relle (avec Partie Oprative).
Simulation sans P.O. Condition relleLe fonctionnement sera vrifi en simulant le comportementde la Partie Oprative, cest dire ltat des capteurs, envalidant uniquement des entres.
Val ider l es entres cor respondan t ltat ini ti al(posit ion) de la Par ti e Oprati ve.
Vali der l es entres cor respondan t aux condi ti ons de
marche du cycle.
Vrif ier l vol uti on des graf cets (tapes act ives).
Vrif ier les ordres mi s (L eds de sorti es).
Modi f ier l tat des entres en fonction des ordr es mi s
(tat tr ansitoi re de la P.O.).
Modi f ier l tat des entres en fonction des ordres mi s
(tat f inal de la P.O.).
....Toutes les volutions du GEMMA et des grafcets doivent
tre vrifies.
Le fonctionnement sera vrifi en suivant le comportementde la P.O. Positi onner l a P.O. dans sa positi on i ni tiale.
Val ider l es condi ti ons de marche du cycle. Vrifier lvolution des grafcets et le comportement de
la P.O. Toutes les volutions du GEMMA et des grafcets doiventtre vrifies.
-
8/14/2019 System e Automat is e
14/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
14
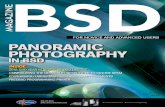
Recherche des dysfonctionnements
1.1.3 Causes de dysfonctionnements
Un dysfonctionnement peut avoir pour origine :un composant mcanique dfaillant (practionneur, actionneur, dtecteur,...).un cblage incorrect ou dfaillant (entres, sorties).un composant lectrique ou lectronique dfectueux (interface d'entre ou de sortie).une erreur de programmation (affectation d'entres-sorties, ou d'criture).un systme non initialis (tape, conditions initiales...).
1.1.4 Mthode de recherche des causes de dysfonctionnement
DEBUT
Mettre en xcution
l'automate
Excution?non Oui
Vrifier le
programmeLancer l'volution
Evolution?
Vrifier led associer
la sortie
Observer l'volution
Evolution?Etat initial ?
Vrifier l'tat initial
Comparer
l'volution
Identique ?Led allume ?
FIN
Modifier l'tat initial
Oui
OuiOui
OuiOui
non
non
non non
Comparer
l'volutionVrifier action
Modifier
programme
affectation sortie
Action ralise ?
Led allume ?
Vrifier led associer
l'entreVrifier chane
d'action
Cblage,
practionneur et
actionneur
Vrifier chane
d'aquisition
Cblage et capteur
Modifier
programme
affectation entre
Oui
Oui
non
non
non
-
8/14/2019 System e Automat is e
15/150
Rsumde Thorie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
15
Automate Programmable
sortie
V
alimentation
practionneur
Shunt
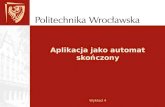
1.1.5 Vrification du cblage d'une entre masse communeCette vrification se ralise l'aide d'un voltmtre-ohmtre et d'un shunt (morceau de fil lectrique).
Vrif ier l alimentati on desentres l aide d un vol tmtr e.
Pour vrif ier le capteur et son
cblage, tester aux di f frents
points indiquer l' aide d un
ohmmtre, contact du capteur
ouvert, contact du capteur
ferm.
Pour vrif ier l ' interf ace d'entre
court-cir cuiter le capteur par un
shunt , le voyan t d' entre doi t
s'allumer.
1.1.6 Vrification du cblage d'une sortie relaisCette vrification se ralise l'aide d'un voltmtre-ohmtre et d'un shunt (morceau de fil lectrique).
Vrif ier que U alimentat ion
existe l aide du vol tmtr e.
Forcer l' aide du shunt lasor ti e automate. Si le
practionneur foncti onne, c est
le modul e de sor ti e qui est
dfectueux . Sinon vrif ier l e
practionneur et son cblage.
Pou r vrif ier l e cblage tester
aux dif frents poi nt s de
connexion l' aide d' un
Ohmmtre en l aissant le shun t.
Automate Programmable
capteur
alimentation entres
V
Shunt
-
8/14/2019 System e Automat is e
16/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
16
LAUTOMATE PROGRAMMABLEA.P.I ( T.S.X 17 )
1) Les A.P.I et les systmes automatiss
- Les premiers automatismes raliss, ltaient laide de circuits portes logiques ( ET, OU, NAND, ). Ces circuits taient fragiles et non modulables, donc non adapts de petites modifications car ilfallait tous revoir do du temps et une norme perte de production
- Au fil du progrs, les automates ont vu le jour, ce qui modifia le traitement des informations, rduit lescabines de cblage et rendit les systmes plus flexibles.En fait les automates reprennent le fonctionnement des portes logiques mais maintenant elles sont
programmables et rduites un faibles encombrement.
2) Comment fonctionne un A.P.I.
- Un API est comme un cerveau, il reoit des informations de ces capteurs, les compare sonprogramme et active ou pas des sorties.
>1
ENT
R ES
SO
RTIES
-
8/14/2019 System e Automat is e
17/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
17
3) Exemple
- Traduction pour lAPI :
- S1 = I 0,00- S2 = I 0,01- KM1 = O 0,00
- Programmation de lA.P.I. ( ici en squentiel )
X0 -> X1 X1
0
1
ENTR ES
SORTIES
KM1
I 0,00
I 0,01
O 0,00
I 0,00Input
( entre)N du blocs ( si ajout dun blocsupplmentaire, N origine = 0,N nouveau blocs =1, etc )
N de lentre
O 0,00Output
( sortie)N du blocs ( si ajout dun blocsupplmentaire, N origine = 0,N nouveau blocs =1, etc )
N de la sortie
X1
I 0,00 I 0,01 O 0,00
-
8/14/2019 System e Automat is e
18/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
18
4) En rsum :
- On programme lA.P.I daprs un grafcet squentiel de fonctionnement, on rattache des capteurs des entres API nommes I X,XX et des relais, contacteurs des sorties API nommes O X,XX.
5) Le langage A.P.I ( TSX 17 ).
5.1) Les entres :
- Il existe 2 types dentres appel test pour lAPI :
les test directes : qui sactive si lentre est active.
les tests indirectes : qui sactive si lentre nest pas active ( idem celluleinverse ).
- Exemple :
I 0,00 = non passant
I 0,00 = passant
I 0,00 = passant
I 0,00 = non passant
5.2) Les sorties :
- Il existe plusieurs types de sorties pour lAPI, mais nous nallons en tudier que 3 sortes :
- Sortie directe : qui fonctionne comme lentre direct.
- Sortie SET ( S ) : qui agit comme une mmoire et reste 1.
- Sortie RESET ( R ) : qui remet zro la sortie S.
I 0,00
I 0,00
I 0,00
I 0,00
S
-
8/14/2019 System e Automat is e
19/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
19
Nota : Les sorties S et R sont surtout utilises pour les practionneurs monostables ou des information mmoriser ( auto-maintien de contacteur maintenir activ pour ne pas quil retombe ltat repos et
pour la progr ammation des tapes du grafcet en mode squenti el.
5.3) exemple :
Va remettre 0 la sortieO 0,03
6) La programmation :
- il existe 2 modes de programmations ; le mode LADDERet le mode SEQUENTIEL
- La principale diffrence rside dans lordre dexcution, en LADDER, il ny a pas dordre dans lesLABELS, le label 102 peut sexcuter avant le label 1 ! donc il nest pas ou mal adapt une
programmation par squence ( type grafcet ) ; contrairement au squentiel qui lui suit directement uneprogrammation grafcet.
I 0,02 = 1 O 0,00 = 0I 0,02 = 0
O 0,03 = 1I 0,04 = 1
S
O 0,03 = 1
S
I 0,04 = 0
O 0,03 = 0I 0,05 = 1
R
O 0,00 = 1
-
8/14/2019 System e Automat is e
20/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
20
6.1) Le mode de programmation LADDER.
- Le LADDERou langage contactse programme par ligne avec les entres ( test ) et les sorties surles mmes pages de programmations.
- Chaque page se nomme un LABEL, ils vont de 0 999, chaque label comprend 4 lignes deprogrammations, il faut le nommer pour que lA.P.I. le reconnaisse comme ligne de programmation.Pour le nommer, il faut utiliser la touche LAB et le numroter de 0 999.
- les labels ne comportent pas dordre dexcution, cest--dire que le label 50 peut sexcuter avantle label 1 ; on ne peut pas programmer suivant un ordre squentiel ( suivant un grafcet ) car une entrepeut enclencher plusieurs sort ies si ell e est uti l ise dans plusieurs labels.
- Lcran se compose de 4 lignes de programmation :
- Sur ces lignes on peut programmer des entres etdes sorties pour former une ligne de programme.
- Les sorties peuvent tres des bobines ou descompteurs, des temporisations ,
6.2) Le mode de programmation SEQUENTIEL :.
-
8/14/2019 System e Automat is e
21/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
21
- Dans le mode SEQUENTIEL, on trouve 3parties :
- Le prliminaire ou PRE qui soccupe de la gesti on des mises en marcheaprs arrts dsirs ounon ( arrts durgences, )
- Le squentiel ou SEQ dans lequel on va crire la structure ou squelette du grafcet et olon peut aussiprogrammer ce grafcet ( condition quil ne soit pas trop important : 4 lignes de
programme par tape et uniquement en sortieSETet RESET). .
- Le postrieure ou POS dans lequel on programme comme en langageLADDERmais ou lonpeut utiliser le grafcet pour ordonner lesLABELS( en incluant des tests directs appartenants auxbits dtapes, exemple : X11 ); chose impossible en modeLADDER.
- 6.2.1) Le squentiel :
- La premire chose raliser est la cration de la structure du grafcet, pour cela vous devez vouspositi onner dans le mode squentiel. Tout dabord vous devez ini tiali ser l automateen mode SEQUENTIEL.
- Vous arrivez ensuite dans lcran de cration du grafcet, cet cran est en fait une partie de pagecomposer de 14 lignes horizontales et 8 colonnes. Chaques lignes comprend diffrents symboles etchaque ligne ses symboles :
- Lignes paires : renvoies, transitions, lignes, et, ou, .
- Lignes impaires : tapes, .
- Vous rentrer ensuite le grafcet en utilisant les renvoies sil dpasse les 5 tapes( voir ci-dessous ).
do je viens, ou je vais
X6
0 6
-
8/14/2019 System e Automat is e
22/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
22
- Une fois le grafcet entr dans lA.P.I., vous pouvez le programmer condition que le programme nesoit pas trs consquent ( pas plus que 4 li gnes). Pour cela vous devez positionner le curseur devantltape programmer laide des touches de directionet ZOOMER dans ltape ou latransition choisie laide de la touche ZOOM .
- Vous pouvez ensuite rentrer votre programme mais il faut savoir que les seules sortiesdisponibles sont de la forme SET et RESET.Il faut donc penser toujours riseter
une tape aprs lavoir seter car sinon le programme se bloque: deux bobines dedistributeur ne peuvent et ne doivent pas tres enclenches en mme temps.
- La programmation seffectue donc sur des tapes et sur des transitions mais les crans nont pas lesmmes fonctions :
- Les transitions : reprsentation des entres.
Elles ne contiennent pas de sorties,
car elle enclenche ltape 1, reprsentpar :
- Les tapes : reprsentations des sorties
Elles ne contiennent pas, en rgle
X5
X61
5
#X1
X0
X1
#X1
#
SX1O 0,01
Bobine detransition.
-
8/14/2019 System e Automat is e
23/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
23
gnrale dentres sauf scurit oubit de temporisation., de compteur, .
Il ne faut pas oublier de reseter une bobine que lon utilise plus
6.2.2) Le postrieur :
- Le postrieure se programme comme le LADDERmais on utilise les bi ts interne dtapede
lautomate pour pouvoir programmer daprs le grafcet. Chaque tape active active un bit interne dumme nom que ltape, ( tape X1 = bit X1 ). Ce bit est utilis ensuite comme entres permettantdactiv des sorties ( voir exemple ci-dessous )
- Dans le postrieure comme dans le LADDER, toutes les sorties sont disponibles ( set ,reste, direct,jump, ) .
7) Exercice :
R
O 0,00
X0L0
O 0,01
X1 O 0,10
-
8/14/2019 System e Automat is e
24/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
24
- Nous allons raliser une programmation tape par tape daprs un grafcet de fonctionnementsquentiel.
- Pour entrer dans un parking il faut une carte et une prsence de vhicule ; puis la barrire se lve etlorsque la cellule s3 indique que le vhicule est pass, la barrire se baisse.
- GRAFCET :
7.1) Identification du nombre dentres et de sorties
S3
S0 . S2 . S3
S3 . S1
KM1
0
1
S0
KM23
2
S1
ATTENTE
-
8/14/2019 System e Automat is e
25/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
25
- Entres = _______- Sorties = _______
7.2 ) Traduction des entres, sorties en langage API :
- S0 = I __ , __ __ - KM1 = O __ , __ __
- S1 = I __ , __ __ - KM2 = O __ , __ __
- S2 = I __ , __ __
- S3 = I __ , __ __
7.3) Raliser le programme en LADDERet indiquer vos constatations, puis raliser ce mmeprogramme en SEQUENTIEL et indiquer vos constatations :
Nota :Pour cet exercices, nous allons utiliser des bits internes qui serviront de relais ( ou demmoire ) pour diffrentier certaines parties du cycle et viter des nuds ( rptition de deux actions
au mme moment ).- Le bit interne sutilise comme une sortie , mais elle noccupe pas de place extrieure, cest direquelle ne peut pas tre cble.
-
8/14/2019 System e Automat is e
26/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
26
8) Application
bas
haut
gauche droite
-
8/14/2019 System e Automat is e
27/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
27
- 8.1) LE PALAN :
Ce palan fonctionne comme indiquer sur le grafcet ci-contre, une 1reimpulsion sur le bouton MA1 fait monter la charge qui une fois en hautse dirige vers la droite, arrive droite tout sarrte pour laisser unoprateur dcharger la palette.
Une fois la palette dcharge, loprateur appuie sur bouton MA2 etrefais partir la palette vers la gauche. Une fois gauche, la paletteredescend et simmobilise en bas pour tre de nouveau charge et lecycle recommence.
- Travail demand :
1) Nommer toutes les ENTREES / SORTIES2) Ecrire le programme en LADDER.
3) Programmer lA.P.I4) Rajouter une temporisation.5) Rajouter un compteur.6) Raliser la programmation en SEQUENTIEL.
- 8.2) LA TABLE DIMPRIMERIE :
Une table dimprimerie permet de raliser des petites cartes de visites la demande, il vous est demandde raliser le programme suivant le grafcet ci-dessous :
dc . 1S0 . 2S0
02C
2S0
2S1
MA1 . bas . auche
droite
haut
0
1
2
MONTER
DROITE
ATTENTE
DROITE
DESCENDRE
3
4
5
MA2.droite.haut
gauche
bas
-
8/14/2019 System e Automat is e
28/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
28
1D et 2D
- 1) En premier lieu il convient de dnommer chaques entres et chaques sorties.- 2) Ecrire le programme sous la forme de LABEL sur le format ci-joint.- 3) Une fois valider par le formateur, vous pouvez essayer sur lA.P.I en utilisant le manuel
programmation TSX 17 .
9) Les temporisations :
- La temporisation est utilise pour temporiser une action ou sortie ; elle peut tre laction ou auretardement. Pour trouver le symbole dune tempo, il faut appuyer sur licne [ ?], cet icne englobe lestempos mais aussi les compteurs, les comparateurs, . . Pour slectionner la tempo, choisir licne [T]et alors le symbole apparat.
2S0
2S1
1
21C
1S1
2D14.1
2D12.0
1D14.1
2D14.1
2D12.0
1D12.0
1S1
2S1
2S0
1S0
3
4
5
6
T Sortie temporis retardement.
Sortie temporis laction.
Entre de la tempo
Vrificateur( souvent shunt aveclentre ).
12.014.0
-
8/14/2019 System e Automat is e
29/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
29
- Pour programmer la tempo, il faut zoomer dans la tempo, et programmer le temps de base TB de 10 ms, 100 ms, 1 s, 1 mn et la dure PRE de 1 9999.
- Ensuite il faut choisir le contact de sortie suivant leffet temporis dsir, et le raccorder la sortie ou aubit activer.
Nota :La temporisation peut tre programme dans le grafcet, si le programme nest pas tropconsquentsinon il faudra le faire dans le postrieure.
10) Exercices :
- Pour ralis cet exercice, positionnez vous dans le postrieur.- Crer un nouveau LABEL la suite de ceux de lexercice prcdent, et utilis comme test direct une
entre non utilise ; puis all slectionner une tempo. LAPI vous demandera de lui donner un numrode 0 20, choisissez en un et valider.
X0L0
10
T1 b1
b1L0
O 0,01
-
8/14/2019 System e Automat is e
30/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
30
- Raccordez chacune des deux sorties de la tempo, une bobine de sortie direct non utilise.- Programmer la tempo ( deux fois ZOOM ) pour quelle compte en seconde ( TB ) jusqu' 5 (
PRESET ).- Que constatez-vous ?
11) Le compteur :
-
8/14/2019 System e Automat is e
31/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
31
- Le processus pour implanter un compteur est exactement le mme que pour la temporisation ; seul lafonction et le cblage diffres.
- Le compteur permet de compter des impulsions ( ou des mises 1 de tests dentres ) etdincrmenter ou de dcrmenter de 1 la valeur de comptage du compteur.
- Si la valeur de comptage est atteinte, la sortie DONE se met un.- Si la valeur de comptage dpasse 9999, la sortie FULL se met 1.- Si la valeur de comptage dcrmente en dessous de 0, la sortie EMPTY se met 1.- Pour remettre le compteur zro en cas de comptage par incrmentation, il faut activ lentre
R.A.Z .- Pour remette le compteur la valeur programme en cas de dcrmentation, il faut activ lentre
PRESET .
Nota :1. La sortie DONEse met un lorsque le compteur atteint sa valeur programme, si le comptage
continu, la sortie se remet zro. Si lon veut garder linformation plus longtemps, il faudra activune sortie SET et la remettre zro( RESET) par lintermdiaire de lentre R.A.Z ou PRESET.
2. Le compteur se programme toujours dans le postrieur dans un label entier ( 4 lignes ).
- Exemple de cblage :
12) Exercices :
I 0,01
B12
C
R
P
U
D
E
D
F
EMPTY :compteur en dessous dezro
DONE :compteur la valeur decomptage.
FULL :compteur au dessus de9999
R.A.Z :remise zro ducompteur
PRESET :remise la valeurde dcompte du compteur
UP :incrmentation ducom teur.
DOWN :dcrmentation ducompteur.
C10
R
P
U
D
E
D
FX0
-
8/14/2019 System e Automat is e
32/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
32
12.1) Raliser le comptage jusqu' 5 de la mise un du test dune entre de votre choix dans lepostrieure ( sans toucher au programmes prcdents), la fin du comptage activera une sortie non utilise.Une fois la programmation du label effectu mettez vous en mode run et effectu vos essais.
12.2) Insrez une tempo dans le cycle de la platine dimprimerie pour chaque descente du tampon :premire tempo de 5 secondes ( lencrage ) pour bien encrer le tampon,
deuxime tempo de 2 secondes ( au marquage ) pour bien encrer la carte de visite.
12.3) Insrer un compteur pour compter 5 cycles et enclencher une sortie, raccorder un voyant, pourprvenir loprateur quil faut nettoyer les lettres du tampon. Essayer ensuite de mettre en srie avec lasortie, un test dentre nommer SY6 et noter ce quil se passe.
12.4) Insrer un compteur pour compter 5 cycles et enclencher une sortie, raccorder un voyant, pourprvenir loprateur quil faut nettoyer les lettres du tampon. Essayer ensuite de mettre en srie avec lasortie, un test dentre nommer SY5 et noter ce quil se passe.
12.5) Mme nonc, mais le cycle doit se bloquer et ntre dverrouillable que par une entre nonutilise prcdemment .
-
8/14/2019 System e Automat is e
33/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
33
FONCTION RETARDOU TEMPORISATION
1. Symbole logique de la fonction retard ou temporisation
Notation Symbole
S= t1/e/t2 e
t1 t2
S=t1/e/t2
TP
Dsignations Fonctionse Signal dentre tout ou rien(0,1) qui enclenche la tempot1 temps de retard par rapport au passage 1 du signal dentret2 temps de retard par rapport au passage 0 du signal dentre
S = t1/e/t2 Signal de sortie (fin de tempo)
2. Fonctionnement
e
S=t1/e/t2
t1 t2 Le dbut du signal de sortie Sest retard du temps t1par rapport au dbut du signal e.La fin du signal de sortie Sest retard du temps t2par rapport la fin du signal e.REMARQUE : Dans la plupart des cas t2 = 0. Donc S = t1/e.
3. Ralisations et composants dune temporisation
Lorsquun signal TOR dentre eest prsent, un compteur sincrmente chaque impulsiondune base de temps (en seconde, 1/10 s , 1/100 s,...).Lorsque le contenu du compteur est gal la valeur de consigne t, qui contient le temps deretard, le signal de sortie Spasse 1.
Composants : Signal dentre Compteur de temps Base de temps Consigne Signal de sortie, fin de temporisation
-
8/14/2019 System e Automat is e
34/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
34
4. Reprsentation dans un Grafcet
Une temporisation dans un grafcet conditionne le franchissement de la transition donclactivation de ltape suivante, en fonction du temps dactivation de ltape laquelle elle estassocie tape.
Le signal dentre est ltape.Le signal de sortie ou de fin temporisation est la rceptivit.
Un grafcet dcrit le fonctionnement en fonction des entres/sorties dune frontire.
La temporisation tant interne cette frontire, elle ne doit pas apparatre en action
dans le grafcet, mais seulement en commentaire. Elle sera donc dfinie par son
logigramme.
Exemple :
X1
5s 0
S=5s/X1
TP11
2
TP1
5s/X1
5. Exercice
Sur une presse, pour des raisons de scurit, loprateur doit commander sa descente laide des deux mains, avec un cart entre les 2 appuis de 0.3 seconde maxi.
Sb1
b2Commandebi-manuelle
Tracer le grafcet dcrivant le fonctionnement de cette commande bi-manuelle.
-
8/14/2019 System e Automat is e
35/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
35
Outils de description du fonctionnement dun automate TP N 12Dure 3 h
1/ Prsentation :
Le systme dont vous disposez est la modlisation dun chariot de fraiseuse, nous lesymboliserons de la faon suivante :
1.1/ Cahier des charges
Afin dusiner une pice, le chariot apporte la pice vers la fraise en grande vitesse(GV) vers la gauche. Au contact du capteur b le dplacement de la pice seffectue enpetite vitesse (PV). Une fois le capteur a actionn, le dplacement du chariot s arrte etrepart sur la droite en grande vitesse, jusquau contact de c.
Ici la petite vitesse est ncessaire afin dobtenir un usinage correct,Ce cycle sera command par un automate programmable le TSX 17.
2/ Etude du systme :
2.1/ La fonction globale du systme : compltez lactigramme (SADT)
W
a b c
Fraiseuse
chariot
capteurs
Moteur
R E C
-
8/14/2019 System e Automat is e
36/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
36
-
8/14/2019 System e Automat is e
37/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
37
2.2/ Dterminer les Entres/Sorties
2.3/ Complter lorganigramme
Entres Sorties
-
8/14/2019 System e Automat is e
38/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
38
2.3/ Ralisation des grafcets du systme
2.31/ Raliser le grafcet du point de vue de la partie oprative (P.O)
2.31/ Raliser le grafcet du point de vue de la partie commande (P.C)
0
1
2
0
1
2
-
8/14/2019 System e Automat is e
39/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
39
2.31/ Raliser le grafcet du point de vue de lautomate
2.4/ Mettre en uvre le systme avec lautomate TSX-17
- Ecrire le programme du TSX-17 sur lAnnexe 1.- Tracer le schma de commande du systme automatis (Annexe 1).- Lancer lessai aprs vrification de la programmation par lenseignant.- Vrifier la conformit du cycle par rapport au cahier des charges.
- Dans ce travail nous nous conformerons aux dfinitions suivantes
Entres de lautomate : Sortie de lautomate :
I0,0 : Entrecapteur c O0,0 : Commande de droite.I0,1: Entrecapteur b. O0,1 : Commande de gauche.
I0,2: Entredu capteur a. O0,3 : Commande de petite vitesse.I0,4 : dcy.10,3 : Init
2.5/ Conclusion
- Le cahier des charges est-il respect ?
- Enoncez les difficults rencontres.
- Dans quel domaine les organigrammes sont-ils plus utiliss ?
0
1
2
-
8/14/2019 System e Automat is e
40/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
40
Annexe 1
1 Schma de puissance :
Sur le systme , le moteur utilis est courant continu.Il est aliment avec une tension de 24 V, pour une puissance de 0,7 KW.
-Avec Km1 : Marche droite ;Km2 : Marche gauche ;Km3 : Marche petitevitesse.
3/ Schma de cblage de la partie commande
24V
0V
M
R
Km1 Km2
Km3
O0,0 O0,1 O0,2 O0,3 O0,4 O0,5 O0,6 O0,7
0V 24V I0,0 I0,1 I0,2 I0,3 I0,4 I0,5 I0,6 I0,7 I0,8 I0,9 I0,10 I0,11 I0,12
Km3
Unit centrale TSX 17-20 : Entres et Sorties Tout ou Rien
Communs Module 0
des sorties
24V
0V
Km2 Ka1Km1L1
KA1
-
8/14/2019 System e Automat is e
41/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
41
Correction
-
8/14/2019 System e Automat is e
42/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
42
2/ Etude du systme
2.1/ La fonction globale du systme (SADT).
2.3/ Complter lorganigramme :
Chariot de fraiseuse
Picebrute
Piceusine
230CapteursRsistance
DplacerInformationcapteur
CopeauxRW E C
Dbut
Dpartcycle
Dplacement gauche
Charioten b
Dplacement gauche en P.V
Chariot
en a
Dplacement droite
Charioten c
Oui
Non
Oui
Non
OuiNon
Oui
Pupitre Programme
-
8/14/2019 System e Automat is e
43/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
43
2.3/ Ralisation des grafcets du systme
2.31/ Raliser le grafcet du point de vue de la partie oprative (P.O)
2.3.2/ Raliser le grafcet du point de vue de la partie oprative (P.C)
0
1
2
3
Dpart, Initialisation
Dplacement gauche
Chariot en b
Dplacement gauche, P.V
Chariot en a
Dplacement droite
Chariot en c
Dcy . Init
0
1
2
3
Km2
b
Km2 Km3
a
Km1
c
-
8/14/2019 System e Automat is e
44/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
44
2.3.3/ Raliser le grafcet du point de vue de la partie oprative (P.C)
Lgende :
Entres de lautomate : Sortie de lautomate :
I0.0 : Entrecapteur c O0.0 : Commande de Km2I0.1: Entrecapteur b. O0.1 : Commande de Km1I0.2: Entredu capteur a. O0.3 :: Commande de Km3I0.4 : dcy.I0.3 : Init
2.4/ Mettre en uvre le systme avec lautomate TSX-17
a b c
Unit centrale TSX 17-20 : Entres et Sorties Tout ou Rien
Communsdes sorties
KM3
24V
KM1 KM2
0V
Km2 Ka1Km1
L1
Dcy
KA1
0
1
2
3
I0.3* I0.4
O0.0
I0.1
O0.0 O0.3
I0.2
O0.1
I0.0
Module 0
-
8/14/2019 System e Automat is e
45/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
45
Dossier Ressource
-
8/14/2019 System e Automat is e
46/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
46
Prsentation gnrale de lautomate TSX-17
-
8/14/2019 System e Automat is e
47/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
47
LOrganigramme
Exemples dutilisations
Exemple 1 :
Un dispositif doit porter une temprature de 75C un liquide stock dansune cuve, la temprature ambiante de 20C. Le traitement thermique est interrompuds que la temprature du liquide atteint la temprature de consigne.
Organigramme Langage algorithmique
Exemple 2 :Organigramme Langage algorithmique
Procd
Terminaison (Dpart, fin de cycle)
Dcision (oui, non)
Dbut
Enclencher
chauffage
Lire Tl
Tl=Tc
Fin
Dbut algorithme :ChauffeVariablesTemps consigne :Tc=75C
Temps liquide :TlCH, chauffage 0 nonenclench CH, chauffage 1 enclench
Dbut action :RpterCH 1, enclencher chauffage ,lire Tl .Jusqu Tl=Tc Fin actionFin algorithme
Dbut
Condition
Traitement1
Traitement2
Dbut algorithme :Structure alternativeDbu actionSIcondition vraieAlors faire traitement 1 Sinonfaire traitement 2 Fin siFin actionFin algorithme.
-
8/14/2019 System e Automat is e
48/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
48
LAnalyse fonctionnelle
Fin
Energie
W C E
Configuration-programme
Exploitation
Dialogues H/MDialogues M/M
R
Rglage-mcaniques (courses, capteurs..)-lectrique (variateur)
Caisserentrerou sortir
Caisserentre ousortie
Pertes
nergtiques
Info capteurs
Systme
Stocker oudstocker des
caisses
-
8/14/2019 System e Automat is e
49/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
49
Evaluation Formative :
Tches raliser Correct Correct (avec
aide)
A revoir Non compri
Fonction globaledu systme
Organigramme du
systmeGraphe des
entres / SortiesGrafcet pt vu
POGrafcet pt vu
PCGrafcet pt vuAutomate
Mise en uvre
Du programme
Apprciation
globale :
Remarque :
-
8/14/2019 System e Automat is e
50/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
50
Fiche de synthse
Les Organigrammes :sont davantage utiliss au niveau de linformatique.
Le graphe des entres /Sorties :
Grafcet du point de vue P.O :
Ici nous sommes la place dun industriel qui souhaite un systme automatisavec un fonctionnement prcis. Il ne connat pas la technologie qui va tre employe.
Grafcet du point de vue PC :
Dans ce cas nous sommes le concepteur qui connat la technologie du systme,pouvant dfinir les lments commander.
Grafcet du point de vue automate :
Capteurs +lments du
pupitre decommande
Actionneurs,qui agissent
sur la P.O
transition
tapeAction prsente par unverbe linfinitif
Expression conjugue dun tat.
Practionneuragissant sur laction
souhaite.Symbole des Capteurs ou lments du
pupitre de commande actionns.
X0 X1
#I0,1 Identification des entres de
lautomate. I0,
1
0
Dans ltape dsigne, lessorties de lautomate agirontsur lalimentation des pr-actionneurs dsirs.
1 Dplacer le chariotA gauche
Le chariot est sur b.
1 Km1
b
O0,0 O0,1 X1 O0,0
O0,1X1
-
8/14/2019 System e Automat is e
51/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
51
Programmation : En traitement Postrieur chaque sortie est nomme une seulefois.
Fiche de synthse
Les Organigrammes :sont davantage utiliss au niveau de linformatique.
Le graphe des entres /Sorties :
Grafcet du point de vue P.O :
Ici nous sommes la place
Grafcet du point de vue PC :
Dans ce cas nous sommes
Grafcet du point de vue automate :
C. +lments du
.
A.,
sur
.
.A...
E..
Practionneur
..Symbole ...
X0 X1
#I0,1 Identification
..
1
0
Dans ltape dsigne, .
1 Dplacer le chariot gauche
Le chariot est sur b.
1 Km1
b
O0,0 O0,1
X22 O0 ,1
-
8/14/2019 System e Automat is e
52/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
52
Programmation : En traitement Postrieur chaque sortie est nomme une seulefois.
2 O0 ,1
-
8/14/2019 System e Automat is e
53/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
53
ACTIONNEURS
- Moteurs
- Vrins- Electrovannes- etc.
CAPTEURS
- Dtecteur de fin de course- Dtecteurs de proximit- Cellules photolectriques
- etc.
PRE-ACTIONNEURS
- Contacteurs- Variateur de vitesse
- Distributeurs- etc.
ORGANE DE DIALOGUE
- Boutons, voyants- Terminal de programmation
et de rglage- Ecran / clavier
AUXILIAIRES DECOMMANDE
- Relais- Contacteurs auxiliaires- Cellules pneumatique
AUTOMATE PROGRAMMABLE
PARTIEOPERATIVE
PARTIECOMMANDE
Modulesd'entres
Modulesde sorties
Unit centrale(lecture du programme)
Module de dialogue
TRAITEMENT DES DONNEES
STRUCTURE D'UN AUTOMATISMEPILOTE PAR UN A.P.I.
-
8/14/2019 System e Automat is e
54/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
54
Traitement interne
Acquisition des entres
Prliminaire
Squentiel
Postrieur
Mise jour des sorties
Acquisition de l'tat physique desmodules d'entres de l'automate
Traitement interne
Le traitement prliminaire :langage contact,
liste d'instructions,ou littral
Le traitement squentiel :Grafcet
Le traitement postrieur :langage contact,liste d'instructions,
ou littral
Mise jour de l'tat physique desmodules de sorties de l'automate
PRINCIPE DE FONCTIONNEMENT DU TSX37AVEC UN PROGRAMME GRAFCET
-
8/14/2019 System e Automat is e
55/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
55
Zone de traitement Prliminaire
Il s'excute avant le grafcet et il permet detraiter des vnements ayant une influencesur le traitement squentiel et postrieur :- gestion des reprises secteurs,- arrt d'urgence,- initialisation,- prpositionnement des graphes.
Label 1
Label 2
Zone de traitement Postrieur
Il s'excute aprs le grafcet. Ce traitement estle dernier excut avant l'activation dessorties. Il permet galement de programmer lalogique de sortie.D'une manire gnrale il est recommand de
programmer les actions agissant directementsur le processus dans ce traitement
postrieur.
Label 1
Label 2
Zone de traitement Squentiel
Il permet de programmer l'ossature del'application. Il contient donc la structure dugrafcet avec les rceptivits associes auxtransitions et les actions associes auxtapes.
N.B. :- 20 tapes peuvent tre activessimultanment,- 24 transitions peuvent tre validessimultanment
Page 1
Transition de X10X1110
11
12
12
10Page 2
Transition de X20X21
20
21
22
22
20
STRUCTURE D'UN PROGRAMME GRAFCET
-
8/14/2019 System e Automat is e
56/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
56
INTERPRETATION D'UN LANGAGE DE PROGRAMMATIONEN LADDER (TRAITEMENT PRELIMINAIRE, TRANSITION DU
TRAITEMENT SEQUENTIEL, TRAITEMENT POSTERIEUR)
Correspondance entre la continuit lectrique d'un contact et le niveau de l'entre associe.
Exemple : 1 contact fermeture (S1) et 1 contact ouverture (S2) aliments en 24 Vcc relis un module d'entres d'automate programmable.
Symboles graphiques de programmationReprsentation dechaque contact
lectromcanique
Niveaux logiquesDes entres
associesTest de l'tat du bit del'entreAssocie au contact
Test de l'tat inversedu bit deL'entre associe aucontact
"Actionn" "1" Rsultat du test : "1" Rsultat du test : "0"S1"Repos" "0" Rsultat du test : "0" Rsultat du test : "1"
"Actionn" "0" Rsultat du test : "0" Rsultat du test : "1"S2"Repos" "1" Rsultat du test : "1" Rsultat du test : "0"
Entre 1%I1.1
+ 24 V cc
S1
S2
Module d'entre
de l'automate
Entre 2%I1.2
-
8/14/2019 System e Automat is e
57/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
57
Correspondance entre le niveau logique de la sortie et la continuit de la bobine associe.
Exemple : 1 bobine de contacteur (KM1) alimente en 24 Vcc pilote par une sortierelais d'automate.
Symboles graphiques de programmationRsultat de la fonctionlogique
Transfert du rsultat dela fonction logique dansle bit de la sortieassocie la bobine
Transfert du rsultatinverse de la fonctionlogique dans le bit de lasortie associe labobine
"0" Rsultat du transf : "0" Rsultat du transf : "1""1" Rsultat du transf : "1" Rsultat du transf : "0"
Etat de la bobine KM1 : - "Active" si le rsultat du transfert est "1"- "Repos" si le rsultat du transfert est "0"
Commun
C1
KM1
24 V
0 V
Module de sortiesde l'automate
Sortie 1%Q0,1
-
8/14/2019 System e Automat is e
58/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
58
LE PL7 MICRO
Le PL7 Micro est un logiciel sous environnement Windows
Il se lance par un "double clic" sur le fichier "*.stx" contenant l'application ou par l'intermdiairedu menu dmarrer, programme, modicon tlmcanique, Pl7 micro Vx.x.
1) Nouvelle application :
Pour une nouvelle application, dans le menu principal, faire :
FichierNouveau.
La fentre ci dessous s'ouvre.
Choisir l'automate utilis par exemple TSX3721 V3.0 et choisir la programmationGrafcet.
Valider votre choix par l'appui sur le bouton "OK".
L'application est cre et la fentre "Navigateur Application" s'ouvre alors.
-
8/14/2019 System e Automat is e
59/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
59
2) Application existante:
Aprs un "Double clic" sur le fichier contenant l'application "*.stx", ou parl'intermdiaire de "Fichier, Ouvrir" ou encore "APConnecter", la fentre NavigateurApplication" s'ouvre.
Cette fentre est de la forme "Explorateur" et contient toutes les informations relatives l'application, c'est dire la configuration de l'automate, son programme, ses variables, les tablesd'animations,
Un simple "Double clic" ou "Clic droit" sur le dossier choisi par le programmeur, permetd'afficher un menu, d'ouvrir le dossier correspondant, d'obtenir certaines proprits.
Dans la tche matre, nous retrouvons les trois traitements principaux :
Prl traitement prliminaire,
Chart traitement squentiel.Post traitement postrieur.
-
8/14/2019 System e Automat is e
60/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
60
Aprs avoir slectionn la configuration matrielle et un "clic droit", nous avons lapossibilit d'ouvrir la configuration. Nous retrouvons la fentre ci-dessous :
Un double clic sur le module correspondant permet la configuration de ce dernier ouencore la mise au point en mode connect (connexion tablie entre l'automate et l'ordinateur de
travail).
-
8/14/2019 System e Automat is e
61/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
61
Lorsque l'utilisateur fait la commande "APConnecter "et que le fichier implant dans la
mmoire du l'ordinateur PC est diffrent de celui dans la mmoire de l'automate, la fentre ci-dessous s'ouvre.
Le bouton "AutomatePC" permet de transfrer le programme contenu dans lammoire de l'automate vers l'ordinateur PC.
Le bouton "PCAutomate" permet de transfrer le programme de contenu dans lammoire de l'ordinateur PC vers la mmoire de l'automate. Lors de cette commande, l'automatedoit tre en "Stop". Ne pas oublier de le remettre en "Run" une fois cette opration termine.
-
8/14/2019 System e Automat is e
62/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
62
Traitement prliminaire
Ouvrir le traitement prliminaire en double-cliquant sur PRL . Il peut tre programmen Ladder (LD), structur (ST), ou instruction list (IL)
Pour faire une modification "double-cliquer" sur le RUNG. Il passe alors en rouge. Lessymboles en LADDER apparaissent en bas de lcran. Ils sont accessibles par les touchesfonctions (F1 F12).Une fois les modifications termines, valider le RUNG par un appui sur latouche "Entre". Il repasse en noir.
Les modifications sont possibles en mode connect.
-
8/14/2019 System e Automat is e
63/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
63
Traitement squentiel
1) Modifier un grafcet
Ouvrir les pages grafcet en "double-cliquant" sur "GR7".
Les symboles de construction apparaissent en bas de lcran. Ils sont accessibles par les touchesfonctions (F1 F12).Positionner le curseur sur le grafcet modifier, " double-cliquer", le grafcet devientrouge. Effectuer la modification et valider par la touche "Ente". Le grafcet redevient noir.
-
8/14/2019 System e Automat is e
64/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
64
2) Modifier une transition
Positionner le curseur sur la transition modifier, cliquer droite et choisir "Ouvrir".
Les transitions peuvent tre programmes en Ladder (LD), en structur (ST), ou eninstruction list (IL). Les symboles Ladder apparaissent de nouveau en bas de lcran. Ils sontgalement accessibles par les touches fonctions (F1 F12).
-
8/14/2019 System e Automat is e
65/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
65
Traitement postrieur
Pour ouvrir les pages du traitement postrieur, "double-cliquer" sur "POST". Lepostrieur peut tre programme en Ladder (LD), en structur (ST), ou en instruction list (IL).Les symboles Ladder apparaissent en bas de lcran et sont accessibles par les touchesfonctions (F1 F12).
-
8/14/2019 System e Automat is e
66/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
66
Paramtrage dun bloc fonction
Pour modifier les paramtres dun bloc fonction (tempo, compteur,), cliquer sur FBprdfinis dans dossier variables, puis choisir le type de fonction dans le menu droulant.
Il est possible de modifier la valeur de prslection en mode connect, mais pour quilsoit pris en compte il faut passer lautomate en "STOP", faire une initialisation "INIT", puisrepasser lautomate en "RUN". Une fois la modification termine valider et fermer la fentre.
-
8/14/2019 System e Automat is e
67/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
67
Utilisation dune table danimation
Pour visualiser ltat dune ou plusieurs variables en mode connect, il suffit de crer une tabledanimation. Pour cela cliquer droite sur "table danimation", et choisir "crer".
Choisir ensuite le nom des variables que vous dsirez visualiser. Il est possible de sauvegardercette table lors de la fermeture de la fentre.
A laide des touches fonction (F3 F8), nous avons la possibilit de forcer ou de modifier cesvariables.
-
8/14/2019 System e Automat is e
68/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
68
STATION
DOSSIER TECHNIQUE
Application :
Concepteur :
Version logiciel :
Projet :
Version application :
Date de dernire modification :
Automate cible :
EXERCICES D'APPLICATION.STX
ARROUD
PL7 V3.3
TRETEMENT DE SURFACE
0.0
26/02/2005 11: 22: 52
TSX 3722Checksum: 1593 B
-
8/14/2019 System e Automat is e
69/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
69
-
8/14/2019 System e Automat is e
70/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
70
-
8/14/2019 System e Automat is e
71/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
71
-
8/14/2019 System e Automat is e
72/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
72
-
8/14/2019 System e Automat is e
73/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
73
-
8/14/2019 System e Automat is e
74/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
74
-
8/14/2019 System e Automat is e
75/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
75
-
8/14/2019 System e Automat is e
76/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
76
-
8/14/2019 System e Automat is e
77/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
77
-
8/14/2019 System e Automat is e
78/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
78
-
8/14/2019 System e Automat is e
79/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
79
-
8/14/2019 System e Automat is e
80/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
80
Capteurs T.O.R TP N 23Dure 1h30
1/ Daprs les capteurs prsents
Compltez les dfinitions et la fonction globale des capteurs selon un point de vue gnral.
Un capteur est un dispositif technologique pour le changement dtat physique (ex : activation ducapteur par une pice).
Et un dispositif qui cette saisie en un signal exploitable par la partie commande (ex : Signal
logique 24 V).
2/ Identification de capteurs sur des systmes
Daprs le fonctionnement du Magasin tournant, vous complterez le tableau ci-dessous :
Afin rpondre la question, vous ferez fonctionner les systmes. Pour ce faire utiliserez ladocumentation technique.
N Capteur Type Rle dans le systmeInductifInductif
ElectromcaniquePhoto lectrique
Dtecteur galet
Dtecteur photolectrique
nergie Rglage
Configuration
Exploitation
Capteur
-
8/14/2019 System e Automat is e
81/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
81
Sur le systme du transgerbeur vous identifierez la fonction des capteurs suivant :
Type Rle dans le systmePhotolectrique
Electromcanique
Par ces divers capteurs, nous constatons que chacun traite linformation de manirediffrente.
Nous allons donc reprsenter les diffrentes transformations subit par le signal dentre.Exemple :
Constitution dun capteur de position galet
Compltez le graphe ci-dessous en vous aidant du vocabulaire donn :
Constitution gnrale des capteurs
Vocabulaire :Phnomne physiqueTransducteurSignal adaptCorps dpreuv
Daprs la documentation donne en ressource, indiquez pour les capteurs :S6 du magasin tournantEt le photolectrique du transgerbeur
Leur correspondance un systme de dtection de barrage, reflex ou de proximit.S6systme de dtection
galetLamellesde cuivreActionmcanique Signal lectrique
-
8/14/2019 System e Automat is e
82/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
82
S1systme de dtection
3/ Guide pour le choix dun capteur de position
Compltez le guide de choix dun capteur de position avec les trois technologies existantes, etdsignez les types de dtecteurs :
Systme automatis
Le systme est-ilpneumatique ?
Le traitementlogique est-il
pneumatique
Technologie Technologie Technologie
InterrupteurDe position
Lobjet est-ilsolide
Lobjet est-ilmtallique ?
Distance 48 mm ?
Distance> 15 mm ?
Dtecteur
Systme
LambianceEst-ellePoussireuse?
Lobjet est-ilBrillant ?
Systme
Oui Non
NonOui
Oui Non
Non
NonNon
Non
Non
Oui
Oui
Oui
Oui
Oui
-
8/14/2019 System e Automat is e
83/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
83
Cet Organigramme permet de choisir, en fonction des contraintes de lenvironnement, des capteursadapts au systme.
1/ Daprs les capteurs prsents
Compltez les dfiniti ons et la foncti on globale des capteurs selon un
point de vue gnral
Un capteur est un dispositif technologique pour saisi rle changement dtat physique (ex : activationdu capteur par une pice).
Et un dispositif qui convertitcette saisie en un signal exploitable par la partie commande (ex : Signallogique 24V).
2/ Identification de capteurs sur des systmes :
Daprs le fonctionnement du Magasin tournant, vous complterez le tableau ci-dessous :
N Capteur Type Rle dans le systme
S1Inductif Dtecte si les chariots ont fait un tour
complet.
Dtecteur Systme Dtecteurcapacitif
Dtecteur galet
Dtecteur photolectrique
Saisiret converti r
nergie Rglage
Configuration
Exploitation
Phnomnephysique
I mageInformationnell
Capteur
-
8/14/2019 System e Automat is e
84/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
84
S2Inductif Dtecte le passage des balancelles.
S4 ouS9 Electromcanique Dtecte louverture de la porte ouDtecte les socles de protection
S6 Photo lectrique Dtecte une pice dans la balancelle
Sur le systme du transgerbeur vous identifierez la fonction des capteurs suivant :
N Capteur Type Rle dans le systme1 Photolectrique Prsence dun casier2 Electromcanique Fin de course
Par ces divers capteurs, nous constatons que chacun traite linformation de manirediffrente.
Nous allons donc reprsenter les diffrentes transformations subit par le signal dentre.
Exemple :
Constitution dun capteur de position galet
Compltez le graphe ci-dessous en vous aidant du vocabulaire donn :
Constitution gnrale des capteurs
Vocabulaire :
Phnomne physique
Corps
dpr euv
Transducteur
Galet Lamellesde cuivre
Actionmcanique
Signal lectrique
Phnomne
PhysiqueSignal adapt
-
8/14/2019 System e Automat is e
85/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
85
TransducteurSignal adaptCorps dpreuve
Daprs la documentation donne en ressource, indiquez pour les capteurs S6 et 1 leur
correspondance un systme de dtection de barrage, reflex ou de proximit.
S6systme de dtectionS1systme de dtection
3/ Guide pour le choix dun capteur de position
Compltez lorganigramme :
Systme automatis
Le systme est-ilpneumatique ?
Le traitementlogique est-il
pneumatique
Technologie
PneumatiquTechnologie
Electr omcan ique
Technologie
Electronique
Lobjet est-ilsolide
Lobjet est-ilmtallique ?
Distance 48 mm ?
Distance> 15 mm ?
Dtecteur
Photolectr ique
LambianceEst-ellePoussireuse?
Oui Non
NonOui
Oui Non
Non
NonNon
Oui
Oui
Oui
Photolectr ique de type refl ex
Photolectr ique de type refl ex
-
8/14/2019 System e Automat is e
86/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
86
1
1
GraphedeCommandeEtapeTransition
1- RAPPEL
I l s agi t d un out i l de descr ipti on squentiel des automati smes, il se composede 3 lments graphiques :
v tape: correspond une squence (tat spcifique de la machine au cours de laquelle lesystme est invariant). A chaque tape, on associe des actions :
Une tape est soit active, soit inactive. A un instant donn, la situation de lautomatisme estentirement dfinie par lensemble des tapes actives.
Lexcution de certaines actions peut tre soumise des conditions logiques lies des variablesdentre ou aux tats dautres tapes appeles tape conditionnelle.
InterrupteurDe position
Dtecteur
InductifSystme
Prox imi t
Systm
Barrage
Dtecteurcapacitif
Lobjet est-il
Brillant ?
Systme
Reflex
Non
Non
Oui
Oui
liaison oriente
tape
transition
Allumer L1
tape initialetape active
0 12Moteur M3
Si tape 2 ative , alorsrotation du moteur
X2
Etape conditionnelle
-
8/14/2019 System e Automat is e
87/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
87
v transition: Elle spare deux tapes successives. On lui associe une rceptivit (unequation logique). La rceptivit associe une transition peut faire intervenir, outre lesvariables dentre, le caractre actif ou inactif de certaines tapes.Une rceptivit toujours vraie est crite =1
13
a
b .X3
c
a
-
8/14/2019 System e Automat is e
88/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
88
1.1- GRAFCET LINEAIRE
Condition initiale : Train en a0, appuie sur le BP S1, un aller retour.
1.2- REPRISE DE SEQUENCE
On rajoute un commutateur S2 : S2 = 0: 1 seul aller retourS2 = 1: marche continu
a0 a1
A R
S11
2
1 A
a0 .S1
a1
a0
2
1 A
a0 .S1
a1
a0.S2
a0.S2
0
0
-
8/14/2019 System e Automat is e
89/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
89
1.3- SAUT DETAPE
Conditions initiales : si le chariot se trouve sur a0, alors une pression sur S1 provoque un allerretour du chariot. Si initialement le chariot ne se trouve pas sur a0, alors une pression sur S1nentrane quun retour du chariot jusqu a0.
1.4- SELECTION DE SEQUENCES : AIGUILLAGE EN OU
A lissue dune tape, on a le choix entre plusieurs squences possibles. Ce choix est fonctiondes diffrentes transitions correspondantes aux rceptivit.
2
1 Aa0 . S1
a1
a0
S1 . a0
2
1 Action A
Action B
m . x
a
b
2
1 Action L
Action M
m . x
l
m
2 Action C
c
Divergence en OU
Convergence en OU
0
0
-
8/14/2019 System e Automat is e
90/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
90
1.5- SEQUENCES SIMULTANEES : AIGUILLAGE EN ET
Souvent, dans une machine automatique poste multi ple, plusieurs squences sexcutent
simu ltanment, mais les actions des tapes dans chaque branche restent indpendan tes.
Pour reprsenter ces squences simu ltanes, une tr ansit ion unique et deux tr ai ts paral llesindiquent l e dbut et la f in des squences.
A partir de ltape 0, la rceptivit m provoque lactivation simultane des tapes 1 et 11 ; puisles squences 2-3-4 et 12-13 voluent de faon indpendante.Les tapes 4 et 13 sont des tapes dattente, lorsquelles sont actives, la transition est franchie.Ltape 7 est active, elle dsactive les tapes 4 et 13.
2
1 Action A
Action B
a
b
12
11 Action L
Action M
l
m
3 Action C
c
DIVERGENCE en ETdbut des squences simultanes
CONVERGENCE en ETfin des squences simultanes
m
13
4
=1
5
0
-
8/14/2019 System e Automat is e
91/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
91
1.6- REGLES DEVOLUTION DU GRAFCET
q Rgle 1L ini ti al isation prcise les tapes actives au dbut du fonctionnement. On repre cestapes ini tiales en doublant les contour s du symbole corr espondan t.
q Rgle 2Une transition est soit valide soit non valide. Elle est valide lorsque toutes les tapesimmdiatement prcdentes (dites tapes dentre de la transition) sont actives. Elle ne
peut tre franchie que lorsquelle est valide ET que la rceptivit associe latransition est vraie. La transition est alors obligatoirement franchie.
q Rgle 3
Le franchissement dune transition entrane lactivation de TOUTES les tapesimmdiatement suivantes (dites tapes de sortie de la transition) et la dsactivation detoutes les tapes immdiatement prcdentes (tapes dentre de la transition).
q Rgle 4Plusieurs transitions simultanment franchissable sont simultanment franchies.
q Rgle 5Si au cours du fonctionnement une mme tape doit tre dsactive et active
simultanment, elle reste active.
Cas particulier :Une tr ansi ti on peut n avoi r aucune tape d entre elle est tou jours vali de) ou aucunetape de sor tie. Les rgles dvolution dfinies ci -dessus s appl iquent de la mme faon.
En conclusion :
Pour fr anchir une transitionil faut que :
- les tapes immdiatement prcdentes soient actives ;
- la rceptivit associe la transition soit vraie.
Le fr anchissement d une transiti onentrane :
- lactivation des tapes immdiatement suivantes ;- la dsactivation de toutes les tapes immdiatement prcdentes.
-
8/14/2019 System e Automat is e
92/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
92
2- NOTION DE POINT DE VUE
La spcif ication " point de vue" dcri t quel ni veau se place le concepteur pour donner
une description du systme. Plusieurs points de vue permettent un n iveau de f inesse
progressif dans l a description des foncti ons de la production normale d'un systme.
2.1- LE POINT DE VUESYSTEME
Ce Grafcet dcrit, sous une forme littrale, le procd, la coordination et l'volution des diffrentessquences (oprations) relatives un systme. La descriptiondemeure abstraiteet ne demande
pas de notion d'automatisme pour la comprendre.On observe l'volution du produit.
Exemple sur le thme : Poste de perage
2
1 Maintenir la pice
1.1.11 Percer la ice d'un
Dpart du cycle
La pice est maintenue
Trou perc
0
3
Pice vacue
Systme
-
8/14/2019 System e Automat is e
93/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
93
2.2- LE POINT DE VUE "PARTIE OPERATIVE"
appel aussiGRAFCET CONCEPTEUR ouFONCTIONNEL
Ce Grafcet dcrit sous formes d'actions fonctionnellesle comportement de la P.O pour obtenir lesactions dsires. A ce niveau, le choix technologique est fait.Il est de forme littrale.
On observe le comportement des actionneurs .
Suite de l'exemple :
3 Fin du perage
Unit en position haute
2
1 Serrage pice
Percer la piced'un 14mm
Dpart du cycle . Prsence pice
Pice serre . Moteur en rotation
Pice perce
0
Mise en marche
du moteur
5
4 Arrt dumoteur
Evacuer lapice
Moteur arrt . Pice libre
Pice hors unit de perage
6 Retour de
l' ecteurEjecteur rentr
Desserrage de laice
P.O.
-
8/14/2019 System e Automat is e
94/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
94
2.3- LE POINT DE VUE "PARTIE COMMANDE"
appel aussiGRAFCET REALISATEUR ouTECHNOLOGIQUE
A ce niveau, le concepteur s'implique dans le fonctionnement de la partie commande . Le
langage est cod . Il reoit des informations et met des ordres.On choisie les practionneurs et les capteurs .
Suite de l'exemple :
2
1 A+
C+
p . v1
a1 . d1
c1
0
3 C-
c0
KM1
5
4 A-
B+
a0 . d0
b1
6 B-
b0
KM1
KM1
P.C.
-
8/14/2019 System e Automat is e
95/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
95
2.4- LE POINT DE VUE "PARTIE AUTOMATE"
appel aussiGRAFCET A.P.I.
Ce Grafcet prend en compte le langage spcifique l'automate et devra se rapprocher sipossible du Grafcet du point de vue "partie commande (P.C)".
Au pralable, une affectation des Entres/Sorties est ncessaire .Suivant le type dAPI, il se peut quil ny est pas la structure de loutil GRAFCET, mais lutilisationdune autre structure comme le langage LADDER, Organigramme, etc.On choisie lAPI et son langage.
Suite de l'exemple :
ENTREESSORTIES
v1 I 0,0 KM1 O 0,0p I 0,1 A+ O 0,1
a1 I 0,2 A- O 0,2a0 I 0,3 B+ O 0,3b1 I 0,4 B- O 0,4b0 I 0,5 C+ O 0,5c1 I 0,6 C- O 0,6c0 I 0,7
d1 I 0,8d0 I 0,9
I0,4
I0,5
I0,7
I0,3 . I0,9
I0,0 . I0,1
5 O0,3
6 O0,4
2
1 O0,0
O0,5
I0,2 .I0,8
I0,6
0
3 O0,6
O0,1
O0,2
O0,1
O0,1
4
A.P.I.
-
8/14/2019 System e Automat is e
96/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
96
-
8/14/2019 System e Automat is e
97/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
97
-
8/14/2019 System e Automat is e
98/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
98
Solution
-
8/14/2019 System e Automat is e
99/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
99
-
8/14/2019 System e Automat is e
100/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
100
-
8/14/2019 System e Automat is e
101/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
101
-
8/14/2019 System e Automat is e
102/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
102
-
8/14/2019 System e Automat is e
103/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
103
-
8/14/2019 System e Automat is e
104/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
104
-
8/14/2019 System e Automat is e
105/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
105
-
8/14/2019 System e Automat is e
106/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
106
-
8/14/2019 System e Automat is e
107/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
107
-
8/14/2019 System e Automat is e
108/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
108
-
8/14/2019 System e Automat is e
109/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
109
-
8/14/2019 System e Automat is e
110/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
110
-
8/14/2019 System e Automat is e
111/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
111
Machine de conditionnement RAVOUX :poste de bouchage
La figure ci dessous reprsente le poste de bouchage dune machine de conditionnement decomprim. Cette figure illustre les choix technologiques retenus sur le poste de bouchage.Quand une palette conforme ( avec flacon plein) est immobilise au poste, un manipulateurconstitu de deux vrins ( V5 et V8 )effectuant un cycle en U invers vient saisir le bouchon laide dune ventouse V4 et lenclipser sur le flacon. Cette opration excute, la palette estlibre et le manipulateur revient en position initiale ( au dessus de la prise bouchon ).
Raliser les grafcets point de vue partie oprative et point de vue partie commande .
-
8/14/2019 System e Automat is e
112/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
112
Malaxeur
Un malaxeur N reoit des produit A et B pess par la bascule C et des briquettes solublesamenes une par une par un tapis damenage T.
z
ab
A B
MT : Moteur Ta is
D : dtecteur de passage
Tapis damenage
Briquettes
VA VB
VCBascule C
Malaxeur pivotant
MR : Moteur de rotationFin de course po
Fin de course p1
Moteur de pivotement 2sens de marche
MP : - Pivotement droite Pd- Pivotement gauche Pg
-
8/14/2019 System e Automat is e
113/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
113
Description du cycleLe cycle reprsenter par le Grafcet est le suivant : partir de ltape darrt initialementactive, laction sur le bouton dpart cycle dcy provoque simultanment :
- Le pesage du produit A jusquau repre a et ensuite le pesage du produit B
jusquau repre b , suivi de la vidange de la bascule C dans le malaxeur- Lamnage de deux briquettes
Lorsque ces deux squences effectues simultanment sont termines, le cycle se termine parla rotation du malaxeur et par son pivotement au bout du temps t, la rotation du malaxeurtant maintenue pendant la vidange.
Raliser le Grafcet point de vue commande de ce systme.
Capteurs :
Dcy : dpart cyclea : dtection du poids du produit A
b : dtection du produit Bz : dtection de la bascule vided : dtection de la chute dune briquette
p1 : Fin de course de pivotement du malaxeurp0 : Fin de course de mise en position dumalaxeurt : contact de temporisation qui donne letemps de malaxage
Rcepteurs :
VA : Electro-vanne damene du produit AVB : Electro-vanne damene du produit BVC : Electro-vanne dvacuation de la trmie
peseuseMT : Moteur du tapis roulantMR : Moteur de rotation du malaxeur pour lemlange des produitsMPd : pivotement droiteMPg : pivotement gauche
-
8/14/2019 System e Automat is e
114/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
114
Plateau tournant
Une machine spciale permet de percer et de tarauder des pices, elle comporte un plateaupivotant sur lequel sont fixes les pices et rois postes de travail :
- Poste 1 : chargement des pices,- Poste 2 : perage,- Poste 3 : taraudage.
Lorsque les pices reviennent au poste 1, elles sont vacues, et le cycle sarrte ou continue
selon le mode de marche slectionn. Les capteurs de position ne sont pas reprsents.
POSTE 2Perage
POSTE 3Taraudage
POSTE 1Chargement des
pices
Evacuation despices
Oprateur
-
8/14/2019 System e Automat is e
115/150
Rsumde Thor ie et Guide de
travaux pratiquesSYSTME AUTOMATIS CONTRL PAR API
115
Reprsenter le Grafcet point de vue commande de ce systme.
-
8/14/2019 System e Automat is e
116/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
116
1
Graphe de Commande Etape Transition
Il sagit :--
Il se compose de 3 lments graphiques :
- Etape: correspond une squence (tat spcifique de la machine au cours delaquelle le systme est invariant). A chaque tape, on associe des actions :
Une tape est soit active soit inactive. A un instant donn, la situation delautomatisme est entirement dfinie par lensemble des tapes actives.
- transition: . On lui associe unerceptivit (une equation logique).
Allumer L1
1
2
3
a
b.X3
c
a
-
8/14/2019 System e Automat is e
117/150
Rsumde Thor ie et Guide de
travaux pr atiquesSYSTME AUTOMATIS CONTRL PAR API
117
I Grafcet linaire
Condition initiale : chariot en a0, appuie sur S1, un aller retour.
II Reprise de squence
On rajoute S2 : S2 = 0 : 1 seul aller retourS2 = 1 : m