SRCP30 - Yamaha Motor
4
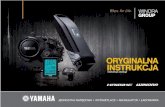
应用机型 APPLICATION 小型单轴机器人 TRANSERVO 单轴机器人 FLIP-X 线性单轴机器人 PHASER 直交机器人 XY-X 水平多关节机器人 YK-XG 拾放型机器人 YP-X 洁净型机器人 CLEAN 控制器 CONTROLLER 各种信息 INFORMATION 383 机器人定位 控制器 脉冲列 驱动器 机器人 控制器 iVY 选配件 1 轴用 SRCP30 MF100 专用高性能控制器, 追加了脉冲列功能, 并进一步提高了便捷性。 特点 ■ 机型概要 名称 SRCP30 电源 主电源:三相 AC200V ~230V 控制电源:单相 AC200V ~230V 运行方法 脉冲列/程序/迹点定位/遥控命令/在线命令 最大控制轴数 1 轴 位置检测 增量式 支持机器人机型 MF100 专用 手持编程器 HPB/HPB-D (带启动开关) P.393 电脑用支持软件 POPCOM P.391 ■ 各部分名称/外形图 DC24V ESC I/O I/O RS232C HPB 157 250 265 290 152.5 136 108 40 34 14 5.5 5.5 ■ 订购型号 SRCP30 ー R3 ー ー 控制器 ー 再生装置 ー 网络选项 ー I/O 连接器规格 SRCP30 R3: RGU-3 ※1 CN1: I/O 扁平电缆 1m (标准) 未填写:无 CC: CC-Link CN2:双绞线 2m DN: DeviceNet PB: Profibus EN: Ethernet ※1. 需要再生装置 RGU-3。 ■ 再生装置 RGU-3 外形图 RGU-3 62 242.5 MAX. 234 52.5 250 265 290 2-5.5 18 16 ■ 回生装置 RGU-3 基本仕 规格项目 RGU-3 (SRCP30 用) 型号 KBD-M4107-0A (含附件) 外形尺寸 W62×H250×D242.5mm 主机重量 3.7kg 再生吸收动作电压 约 380V 以上 再生吸收停止电压 约 360V 以下 附件 控制器的专用连接电缆 (300mm) ※ 所使用控制器与相邻设备之间必须设置间隔 (20mm 左右)。 此外,请使用附件专用连接电缆连接控制器。 1 PHASER 系列 MF100 专用控制器 2 支持脉冲列、程序、迹点定位 3 种运转 方法 3 具有丰富的数据容量,使用程序时可执行 最多 4 个任务的多任务功能 4 支持 CC-Link、 DeviceNet、 Profibus 和 Ethernet ● 机器人控制器 ● 专用 MF100 主要特点 ▶ P.036
Transcript of SRCP30 - Yamaha Motor

应用
机型
APPLICATION
小型
单轴
机器
人
TRANSERVO
单轴
机器
人
FLIP-X线
性单
轴机
器人
PHASER
直交
机器
人
XY-X水
平多
关节
机器
人
YK-XG拾
放型
机器
人
YP-X洁
净型
机器
人
CLEAN控
制器
CON
TROLLER
各种
信息
INFORM
ATION
383
机器
人定
位控
制器
脉冲
列
驱动
器机
器人
控
制器
iVY
选配
件1 轴用
SRCP30MF100 专用高性能控制器,
追加了脉冲列功能,
并进一步提高了便捷性。
特点
■机型概要
名称 SRCP30
电源主电源:三相 AC200V~230V
控制电源:单相 AC200V~230V运行方法 脉冲列/程序/迹点定位/遥控命令/在线命令
最大控制轴数 1 轴
位置检测 增量式
支持机器人机型 MF100 专用
手持编程器 HPB/HPB-D (带启动开关) P.393 电脑用支持软件 POPCOM P.391
■ 各部分名称/外形图
DC24V
ESC
I/O
I/O
RS232C HPB 157
250
265
290
152.513610840 34
14
5.55.5
■ 订购型号
SRCP30 ー R3 ー ー
控制器 ー 再生装置 ー网络选项
ー I/O 连接器规格
SRCP30 R3:RGU-3※1 CN1:I/O 扁平电缆 1m (标准)未填写:无
CC:CC-Link CN2:双绞线 2mDN:DeviceNetPB:ProfibusEN:Ethernet
※1. 需要再生装置 RGU-3。
■ 再生装置 RGU-3 外形图
RGU-362
242.5 MAX.234
52.5
250
265
290
2-5.5
1816
■ 回生装置 RGU-3 基本仕様
规格项目 RGU-3 (SRCP30 用)
型号 KBD-M4107-0A (含附件)
外形尺寸 W62×H250×D242.5mm主机重量 3.7kg再生吸收动作电压 约 380V 以上
再生吸收停止电压 约 360V 以下
附件 控制器的专用连接电缆 (300mm)
※ 所使用控制器与相邻设备之间必须设置间隔 (20mm 左右)。此外,请使用附件专用连接电缆连接控制器。
1 PHASER 系列 MF100 专用控制器
2 支持脉冲列、程序、迹点定位 3 种运转方法
3 具有丰富的数据容量,使用程序时可执行最多 4 个任务的多任务功能
4 支持 CC-Link、DeviceNet、Profibus 和 Ethernet
● 机 器 人 控 制 器 ● 专用 MF100
主要特点 ▶ P.036

应用
机型
APPLICATION
小型
单轴
机器
人
TRANSERVO
单轴
机器
人
FLIP-X线
性单
轴机
器人
PHASER
直交
机器
人
XY-X水
平多
关节
机器
人
YK-XG拾
放型
机器
人
YP-X洁
净型
机器
人
CLEAN控
制器
CON
TROLLER
各种
信息
INFORM
ATION
384
机器
人定
位控
制器
脉冲
列
驱动
器机
器人
控
制器
iVY
选配
件
■基本规格
项目 SRCP30
基本规格
控制轴数 1 轴
可控制的机器人 MF100 专用
最大耗电 2500VA外形尺寸 W152.5×H250×D157mm
主机重量 3.5kg
输入电源主电源:三相 AC200~230V±10% 以内 50/60Hz控制电源:单相 AC200~230V±10% 以内 50/60Hz
轴控制
驱动方式 AC 全数字伺服
位置检测方式 磁式线纹尺
运转方式 脉冲列、程序、迹点定位、遥控命令、在线命令
位置显示单位 毫米
速度设定 1%~100% (1% 单位、通过程序可进行变更)
加减速度设定1. 根据机器人型号和搬运重量参数进行自动加速度设定2. 根据加速度和减速率参数设定 (1% 单位)
分辨率 1μm原点复位方式 增量式
程序
程序语言 雅马哈 SRC多任务 4 个任务
提示方式 手动数据输入 (坐标值输入)、直接示教、示教再现
内存
RAM 128K 带锂电池备份 (5 年有效) 程序、点、参数及故障记录保存
程序100 个程序 (最大程序数)3000 步/合计以下 255 步/每个程序
点 1000 点 (迹点定位时为 256)
命令形式
I/O
通常模式 根据专用命令输入进行机器人运转
脉冲列 模式
类型 选择 1.A 相/B 相、 2.脉冲/字符、3.CW/CCW 其中之一
形式 线路驱动器 (+5V)
频率 最大 2Mpps (线路驱动器)
串行通信 (RS-232C)1. 根据通信命令进行各种数据的收发、参数设定、机器人运转2. 根据 HPB 进行各种数据的收发、参数设定、点示教、机器人运转
外部输入输出
I/O接口
通常模式序列器输入 通用 8 点、专用 8 点序列器输出 通用 5 点、专用 3 点 开路集电极输出
脉冲列 模式
序列器输入 通用 8 点、专用 5 点
序列器输出 通用 5 点、专用 3 点 开路集电极输出
命令脉冲列 输入
端子名 PLUS+、PLUS-、DIR+、DIR-类型 选择上述中的一种
形式 线路驱动器 (+5V)
反馈脉冲输出
端子名 PA+、PA-、PB+、PB-、PZ+、PZ-、PZM+、PZM-类型 A 相/B 相/Z 相
形式 线路驱动器 (+5V)
脉冲数 1 脉冲/μm序列器输入、输出用电源 序列器输入、输出用 DC+24V 外部输入
紧急停止输入 常闭触点输入
原点传感器输入 连接 DC24V 用 B 触点传感器 序列器 (I/O) 输入输出用电源通用
外部通信 RS-232C 1CH (用于 HPB 或通用个人电脑等的通信)
选配件插槽数 1类型 CC-Link/DeviceNet/Profibus/Ethernet
选配件
手持编程器 HPB、HPB-D (带启动开关)
电脑用支持软件 POPCOM
普通规格
使用温度 0℃~40℃
保存温度 10℃~65℃
使用湿度 35%~85%RH (无结露)
噪声耐量 IEC61000-4-4 2 级标准
保护功能 过电流、超载、断线检测、失控检测
※1. 通常模式/脉冲列模式可使用参数进行切换。
SRCP30

应用
机型
APPLICATION
小型
单轴
机器
人
TRANSERVO
单轴
机器
人
FLIP-X线
性单
轴机
器人
PHASER
直交
机器
人
XY-X水
平多
关节
机器
人
YK-XG拾
放型
机器
人
YP-X洁
净型
机器
人
CLEAN控
制器
CON
TROLLER
各种
信息
INFORM
ATION
385
机器
人定
位控
制器
脉冲
列
驱动
器机
器人
控
制器
iVY
选配
件SRCP30
■ I/O 连接器输入、输出信号表
端子编号 信号名称 信号的含义
A-1 ABS-PT 以原点位置为基准的点移动命令
B-1 INC-PT 以当前位置为基准的点移动命令
A-2 AUTO-R 自动运转启动命令
B-2 STEP-R 步进运转启动命令
A-3 ORG-S 原点复位命令
B-3 RESET 复位命令
A-4 SERVO 伺服复位命令
B-4 LOCK 联锁
A-5 DI 0 通用输入 0B-5 DI 1 通用输入 1A-6 DI 2 通用输入 2B-6 DI 3 通用输入 3A-7 DI 4 通用输入 4B-7 DI 5 通用输入 5A-8 DI 6 通用输入 6B-8 DI 7/SVCE 通用输入 7/服务模式输入
A-9 DO 0 通用输出 0B-9 DO 1 通用输出 1A-10 DO 2 通用输出 2B-10 DO 3 通用输出 3A-11 DO 4 通用输出 4B-11 END 正常执行结束
A-12 BUSY 命令执行中
B-12 READY 准备结束 (警报)
A-13 FG 框架接地
B-13 FG 框架接地
A-14 NC 预约 (禁止使用)
B-14 NC 预约 (禁止使用)
A-15 NC 预约 (禁止使用)
B-15 NC 预约 (禁止使用)
A-16 NC 预约 (禁止使用)
B-16 NC 预约 (禁止使用)
A-17 PA+ 反馈脉冲输出
B-17 PA- 反馈脉冲输出
A-18 PB+ 反馈脉冲输出
B-18 PB- 反馈脉冲输出
A-19 PZ+ 反馈脉冲输出
B-19 PZ- 反馈脉冲输出
A-20 PZM+ 反馈脉冲输出
B-20 PZM- 反馈脉冲输出
■ 脉冲列 I/O 连接器输入、输出信号表
端子编号 信号名称
A-1 NC 预约 (禁止使用)
B-1 NC 预约 (禁止使用)
A-2 NC 预约 (禁止使用)
B-2 PCLR 偏差清零输入
A-3 ORG-S 原点复位输入
B-3 RESET 警报复位输入
A-4 SERVO 伺服启动输入
B-4 INH 命令脉冲禁止输入
A-5 DI 0 通用输入 0B-5 DI 1 通用输入 1A-6 DI 2 通用输入 2B-6 DI 3 通用输入 3A-7 DI 4 通用输入 4B-7 DI 5 通用输入 5A-8 DI 6 通用输入 6B-8 DI 7 通用输入 7A-9 DO 0 通用输出 0B-9 DO 1 通用输出 1A-10 DO 2 通用输出 2B-10 DO 3 通用输出 3A-11 DO 4 通用输出 4B-11 IN-POS 到达位置输出
A-12 SRDY 伺服准备结束输出
B-12 ALM 警报输出
A-13 FG 框架接地
B-13 FG 框架接地
A-14 GND 信号接地
B-14 GND 信号接地
A-15 PULS+ 命令脉冲输入
B-15 PULS- 命令脉冲输入
A-16 DIR+ 命令方向输入
B-16 DIR- 命令方向输入
A-17 PA+ 反馈脉冲输出
B-17 PA- 反馈脉冲输出
A-18 PB+ 反馈脉冲输出
B-18 PB- 反馈脉冲输出
A-19 PZ+ 反馈脉冲输出
B-19 PZ- 反馈脉冲输出
A-20 PZM+ 反馈脉冲输出
B-20 PZM- 反馈脉冲输出
■ 输入、输出电路连接示例
DC24V
NPNDI
DO
DO
DI
24V
24G
FG+ -
■ 脉冲列输入电路
330ΩPULS-
SG
+5V
1.5kΩPULS+
1.5kΩ
26LS31
+5V
330ΩDIR-
SG
1.5kΩDIR+
1.5kΩ
26LS32
GND
SG SG
2Mpps

应用
机型
APPLICATION
小型
单轴
机器
人
TRANSERVO
单轴
机器
人
FLIP-X线
性单
轴机
器人
PHASER
直交
机器
人
XY-X水
平多
关节
机器
人
YK-XG拾
放型
机器
人
YP-X洁
净型
机器
人
CLEAN控
制器
CON
TROLLER
各种
信息
INFORM
ATION
386
机器
人定
位控
制器
脉冲
列
驱动
器机
器人
控
制器
iVY
选配
件
SRCP30
■ 脉冲列输入形式
逻 辑 命令脉冲形式 CW 方向 CCW 方向
正逻辑
A 相/B 相
脉冲/字符
CW/CCW
负逻辑
A 相/B 相
脉冲/字符
CW/CCW
■SRCP30 命令一览表
语言名称 含义
MOVA 移动至点数据的位置
MOVI 从当前位置只移动点数据量
MOVF 移动至指定 DI 输入到达为止
JMP 跳至指定程序的指定标签
JMPF 按输入条件,跳至指定程序的指定标签
JMPB 通用输入或内存输入为指定状态时,跳至指定标签
L 定义 JMP 语句、JMPF 语句等跳转目标
CALL 执行其他程序
DO 执行通用输出或内存输出的 ON/OFF 操作
WAIT 待命直到通用输入或内存输入进入指定状态
TIMR 仅在指定时间时,等待进入下步
P 定义点变量
P+ 点变量加 1P- 点变量减 1
SRVO 进行伺服的 ON/OFF 操作
STOP 程序执行暂停
ORGN 执行原点复位动作
TON 执行指定任务
TOFF 停止执行指定任务
JMPP 轴位置与指定条件一致时,跳至指定标签
MAT 矩阵的定义
MSEL 指定移动矩阵
MOVM 移动至矩阵上的指定托盘工件位置
JMPC 计数排列变量 C 与指定值一致时,跳至指定标签
JMPD 计数变量 D 与指定值一致时,跳至指定标签
CSEL 指定计数排列变量 C 的排列要素
C 定义计数排列变量 CC+ 将计数排列变量 C 加上指定值
C- 将计数排列变量 C 减去指定值
D 定义计数变量 DD+ 将计数变量 D 加上指定值
D- 将计数变量 D 减去指定值
SHFT 只执行所指定点数据的坐标位置偏移
■标准附件
I/O 扁平电缆 (CN1)
在 ERCD/SRCP30 标准并联 I/O 和外部设备 (序列
器) 连接时,使用此连接器和扁平电缆。
电缆长度为 1m,电缆头为切断状态。
型号 KAU-M4421-00
双绞线 (CN2)
型号 KAU-M4421-10
在 ERCD/SRCP30 标准并联 I/O 和外部设备连接
时,使用此连接器和双绞线。
电缆长度为 2m,电缆头为切断状态。
使用脉冲列输入设备时,请选择 CN2。