ScopeDome Arduino Shield Manual PL · Następnie wybierz odpowiedni element z listy Chose Arduino...
23
2017 - Copyright ScopeDome - Poland ScopeDome Arduino Shield PCB ver. 1.0, firmware ver. 3.1 Manual Silnik dachu lub klapy z modułem enkodera ScopeDome Arduino Shield
Transcript of ScopeDome Arduino Shield Manual PL · Następnie wybierz odpowiedni element z listy Chose Arduino...
2017 - Copyright ScopeDome - Poland
ScopeDome Arduino ShieldPCB ver. 1.0, firmware ver. 3.1
Manual
Silnik dachu lub klapy z modułem enkodera
ScopeDome Arduino Shield
2017 - Copyright ScopeDome - Poland page: 2
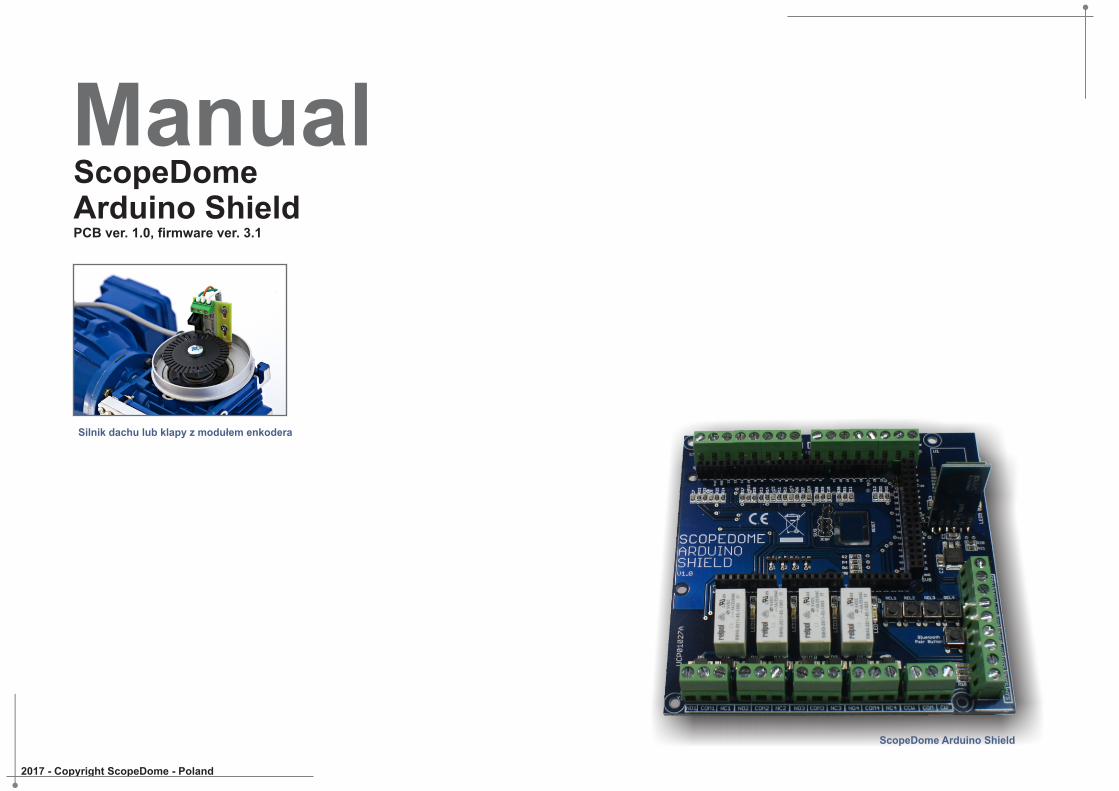
Sterowanie kopuły poprzez ScopeDome Arduino Shield
PCComputer
EthernetHUB
Arduino EthernetShield
ScopeDomeArduino Shield
Arduino MegaBoard
Arduino Bluetooth
Board
Main (Dome Part)
ScopeDomeArduino Shield
Arduino MegaBoard
Arduino Bluetooth
Board
Slave (Shutter Part)
DomeMotor
Interface
ShutterMotor
Interface
main and slavepart connectionby BlueTooth
Windows Xp, 7, 10ASCOM platformScopeDome DriverArduino IDE
Telescope
Internet
2017 - Copyright ScopeDome - Poland page: 3
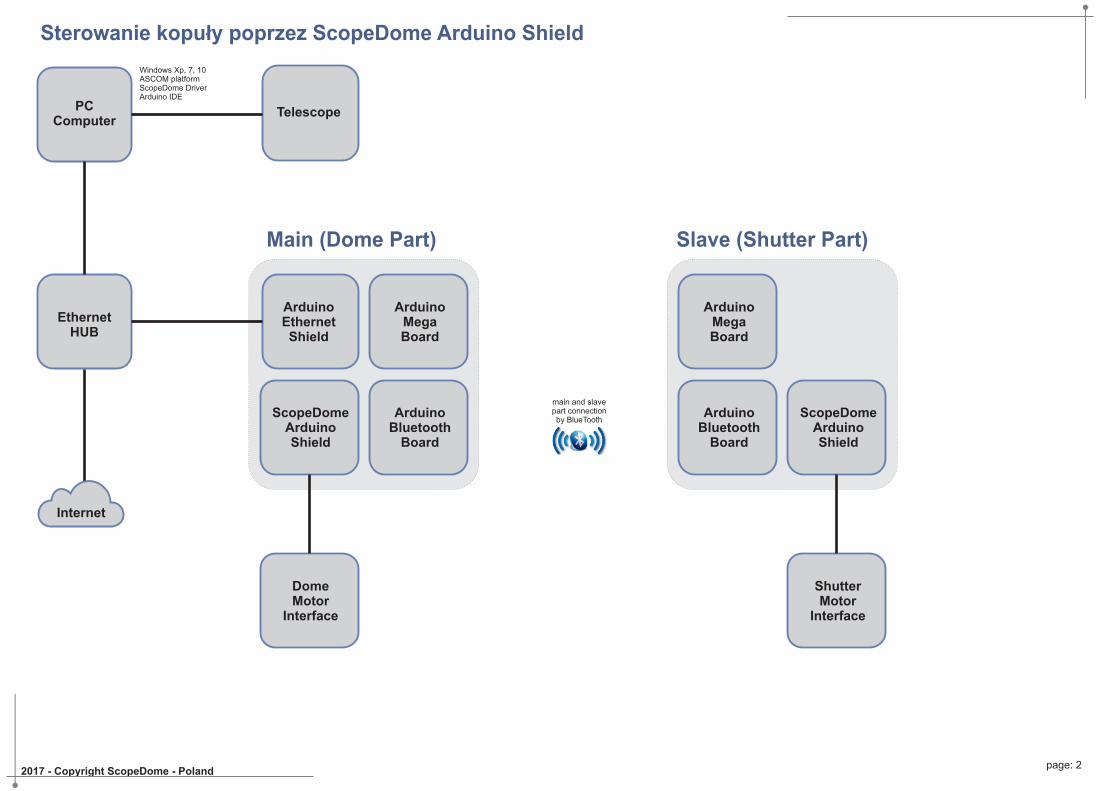
Sterowanie dachem poprzez ScopeDome Arduino Shield
PCComputer
EthernetHUB
Arduino EthernetShield
ScopeDomeArduino Shield
Arduino MegaBoard
Arduino Bluetooth
Board
Slave (Roof Part)
RoofMotor
Interface
Windows Xp, 7, 10ASCOM platformScopeDome DriverArduino IDE
Telescope
Internet
2017 - Copyright ScopeDome - Poland page: 4
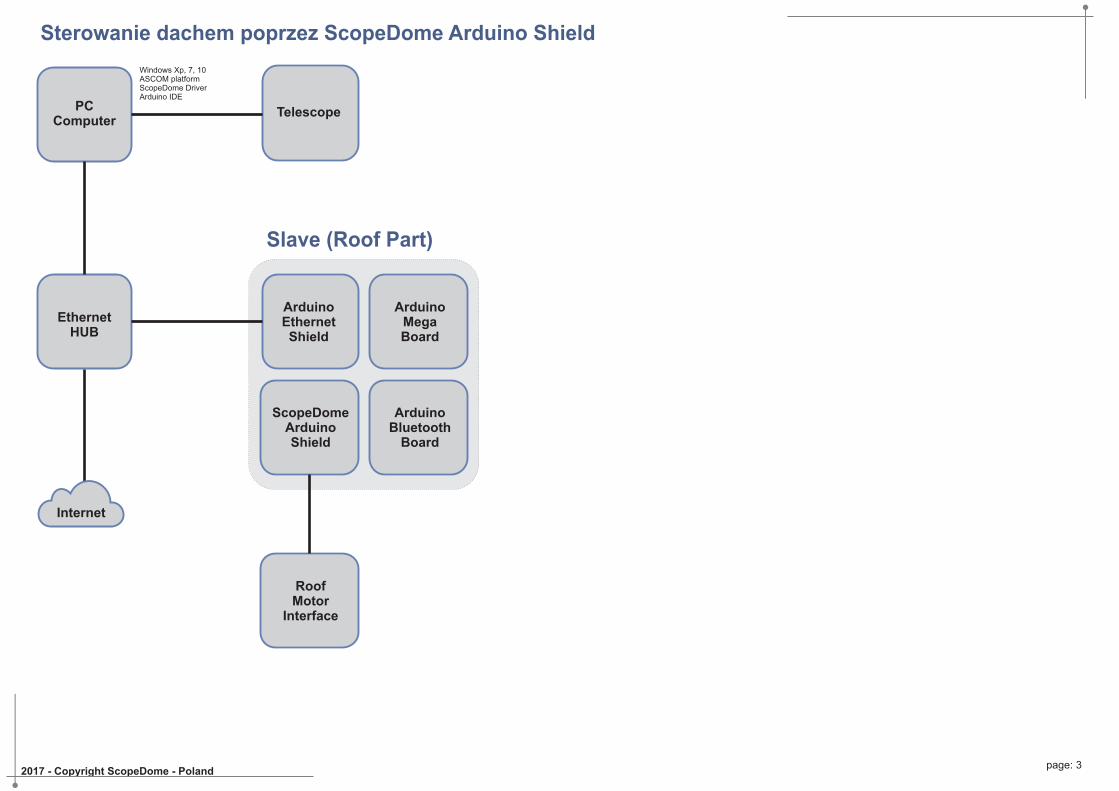
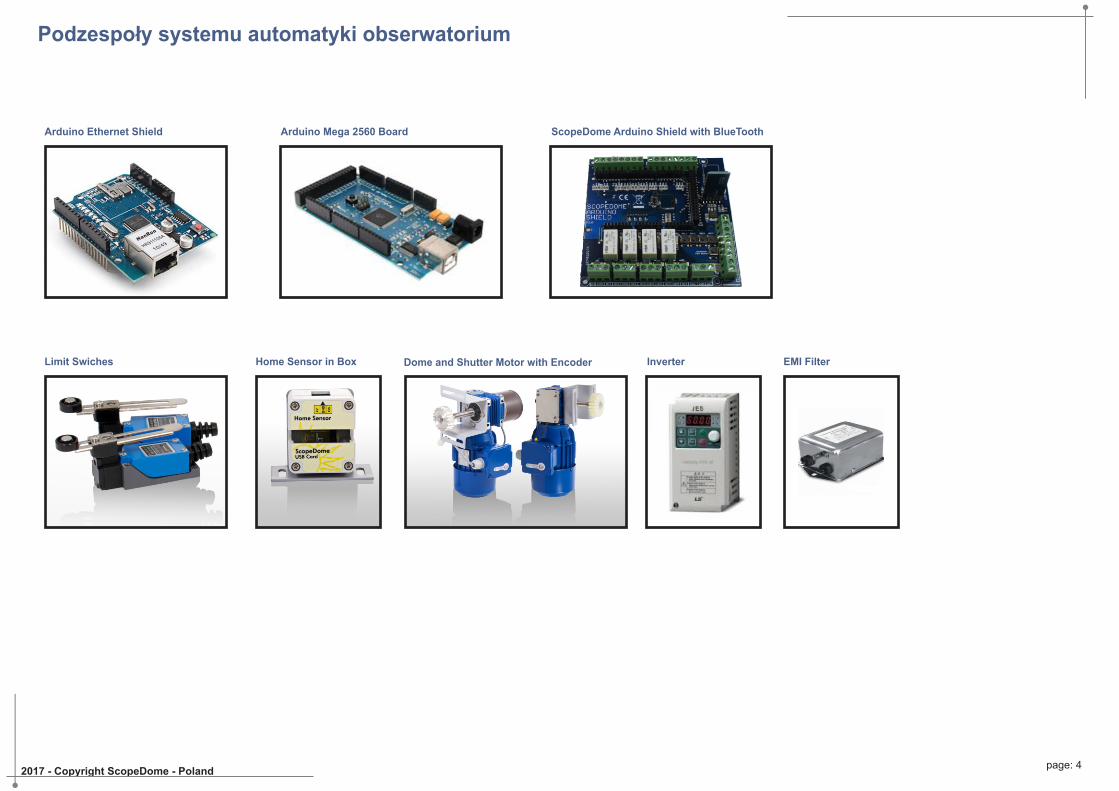
Arduino Ethernet Shield Arduino Mega 2560 Board ScopeDome Arduino Shield with BlueTooth
Dome and Shutter Motor with EncoderLimit Swiches Home Sensor in Box Inverter
Podzespoły systemu automatyki obserwatorium
EMI Filter
2017 - Copyright ScopeDome - Poland page: 5
1. InfoScopeDome Arduino Shield to specjalizowana płytka współpracująca z popularnym układem Arduino Mega oraz z kompatybilnym z Arduino
modułem Ethernet Shield i BlueTooth. Przeznaczona jest do sterowania obserwatorium astronomicznego. Dedykowane do niej oprogramowanie ScopeDome Driver 5.1.4 umożliwia sterownie obserwatorium z kopułą lub odsuwanym dachem.
Karta i oprogramowanie pozwalają na sterowanie dowolnego typu obserwatorium, nie tylko produkcji ScopeDome. Poprzez pla�ormę ASCOM współpracują z popularnymi montażami teleskopów. ScopeDome driver ma wbudowaną komunikację z najpopularniejszymi czujnikami chmur oraz wieloma stacjami pogodowymi, co pozwala na automatyczne zamykanie obserwatorium, w sytuacji, gdy warunki pogodowe tego wymagają.
a) Do sterowania kopułą niezbędne są dwie płytki ScopeDome Arduino Shield. Jedna zaprogramowana jako Master, druga jako Slave. Układ Master steruje kopułą, układ Slave klapą kopuły. Układy łączą się radiowo poprzez moduł BlueTooth. Jeden z układów powinien być wyposażony w moduł Ethernet.
b) Do sterowania dachem niezbędny jest tylko jeden moduł zaprogramowany jako Slave.c) Karty można też używać jako prostego sterownika przekaźników kontrolowanego przez internet lub USB.
2. Podstawowe funkcje karty - komunikacja z komputerem PC przez sieć Internet (IP/Ethernet) lub przez port USB
- obracanie kopuły w kierunku CW lub CCW o zadaną ilość impulsów enkodera - otwieranie lub zamykanie klapy - wyszukiwanie pozycji Home Sensor'a kopuły - zliczenie impulsów enkodera dla pełnego obrotu kopuły (Calibrate Dome Encoder) - włączanie lub wyłączanie jednego z przekaźników
3. Dodatkowe zabezpieczenia - karta automatycznie wyłącza silniki sterujące kopułą, gdy:
a) przez zadany czas na enkoderze nie pojawiają się impulsy zliczające pozycję kopuły b) licznik pozycji kopuły przekracza zaprogramowaną maksymalną wartość
- karta automatycznie wyłącza silniki sterujące klapą lub dachem, gdy minie podany limit czasowy - karta chroni silniki poprzez niezezwalanie na zbyt szybkie przełączanie kierunku ruchu kopuły lub dachu - wbudowane złącza Limit Switch sprzętowo przerywają sygnał sterujący silnikiem - czujniki Open/Close zatrzymują silnik gdy pojawi się sygnał zamknięcia lub otwarcia klapy - czujnik Telescope AtHome uniemożliwia wydanie komendy otwarcia klapy lub odsuwanego dachu - karta automatycznie wykrywa reset wywołany np. zanikiem zasilania umożliwiając przywrócenie właściwego stanu kopuły lub dachu - karta automatycznie resetuje się w przypadku jej zawieszenia (tzw. watchdog)
2017 - Copyright ScopeDome - Poland page: 6
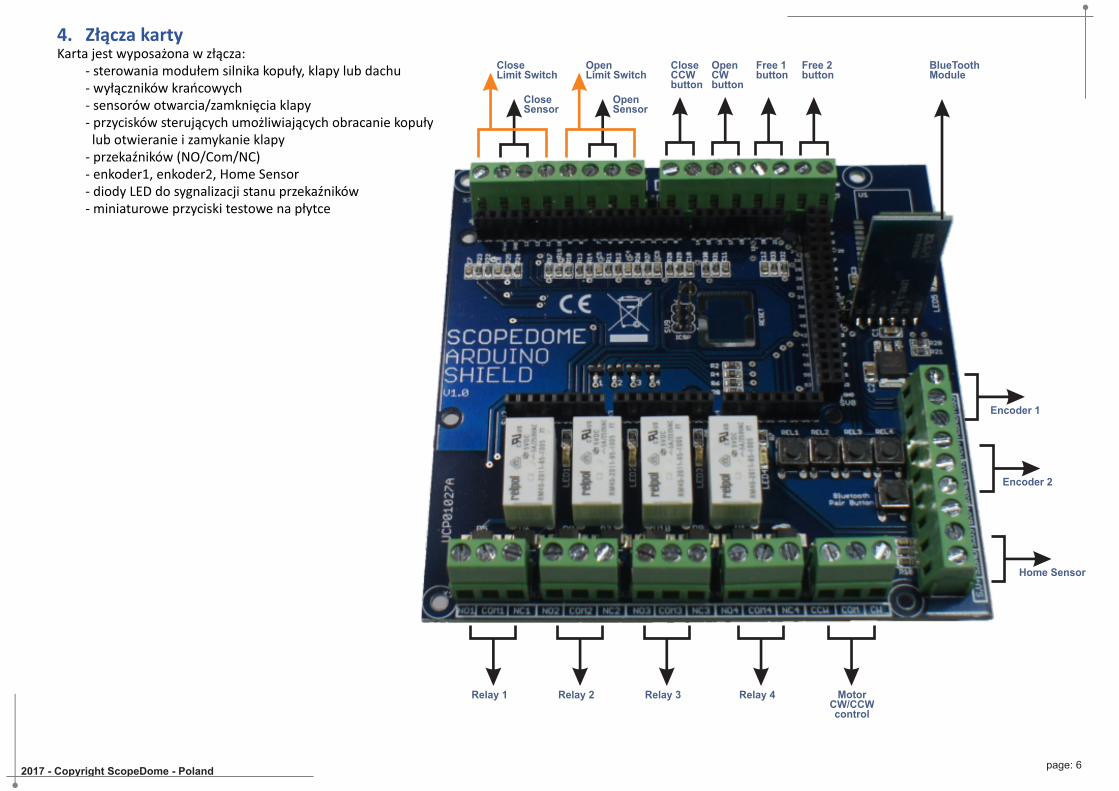
4. Złącza kartyKarta jest wyposażona w złącza: - sterowania modułem silnika kopuły, klapy lub dachu
- wyłączników krańcowych - sensorów otwarcia/zamknięcia klapy - przycisków sterujących umożliwiających obracanie kopuły lub otwieranie i zamykanie klapy - przekaźników (NO/Com/NC) - enkoder1, enkoder2, Home Sensor - diody LED do sygnalizacji stanu przekaźników - miniaturowe przyciski testowe na płytce
Close Limit Switch
Close Sensor
OpenLimit Switch
OpenSensor
Close CCWbutton
OpenCWbutton
Free 1button
Free 2button
BlueToothModule
Encoder 1
Encoder 2
Home Sensor
Relay 1 Relay 2 Relay 3 Relay 4 MotorCW/CCWcontrol
2017 - Copyright ScopeDome - Poland page: 7
5. Zasilanie kartyKartę można zasilać poprzez port USB lub z dedykowanego zasilacza dla Arduino (9V DC). UWAGA: nie można podłączać jednocześnie zasilania z poziomu USB i zasilania na gnieździe Arduino. Grozi to spaleniem karty.
6. Instalacja oprogramowaniaUWAGA: Kartę podłącz dopiero po zainstalowaniu poniższego oprogramowania.Oprogramowanie należy zainstalować w podanej kolejności:a) Driver USB dla Arduino: https://www.arduino.cc/en/Guide/windowsb) Pla�orma ASCOM: http://download.ascom-standards.org/ASCOMPlatform62.exec) Driver ScopeDome: http://www.scopedome.com/Install/ScopeDomeUSBCard/ScopeDomeUSBDomeDriver%20ver%205.1.4.0.exePo zainstalowaniu wszystkich modułów oprogramowania można podłączyć kartę do komputera PC poprzez port USB. W tym momencie karta powinna być rozpoznana przez system Windows i przypisana do jednego z wolnych portów COM.
7. Konfiguracja kartyJeśli kupiłeś kartę w ScopeDome otrzymasz ją z zaprogramowanymi modułami Master i Slave oraz ze sparowanymi modułami BlueTooth. Moduł Master będzie miał podłączony Ethernet Shield. Karta nie będzie wymagała dodatkowego programowania.
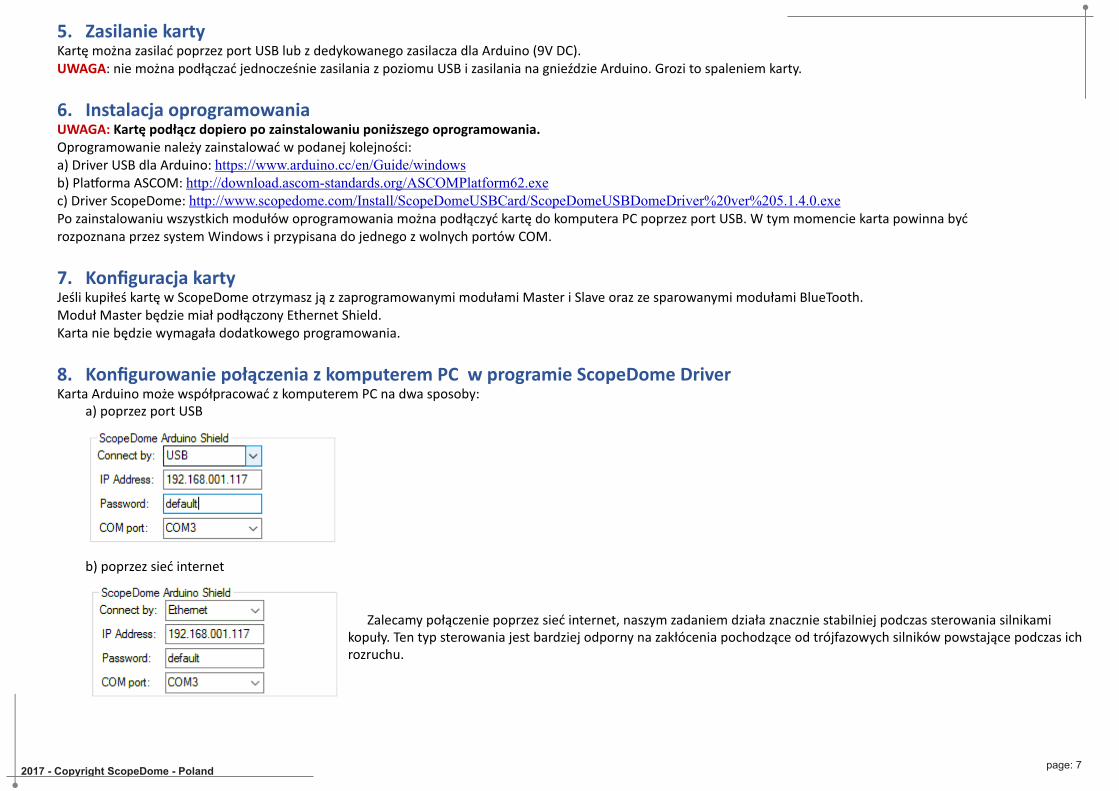
8. Konfigurowanie połączenia z komputerem PC w programie ScopeDome DriverKarta Arduino może współpracować z komputerem PC na dwa sposoby:
a) poprzez port USB
b) poprzez sieć internet
Zalecamy połączenie poprzez sieć internet, naszym zadaniem działa znacznie stabilniej podczas sterowania silnikami kopuły. Ten typ sterowania jest bardziej odporny na zakłócenia pochodzące od trójfazowych silników powstające podczas ich rozruchu.
2017 - Copyright ScopeDome - Poland page: 8
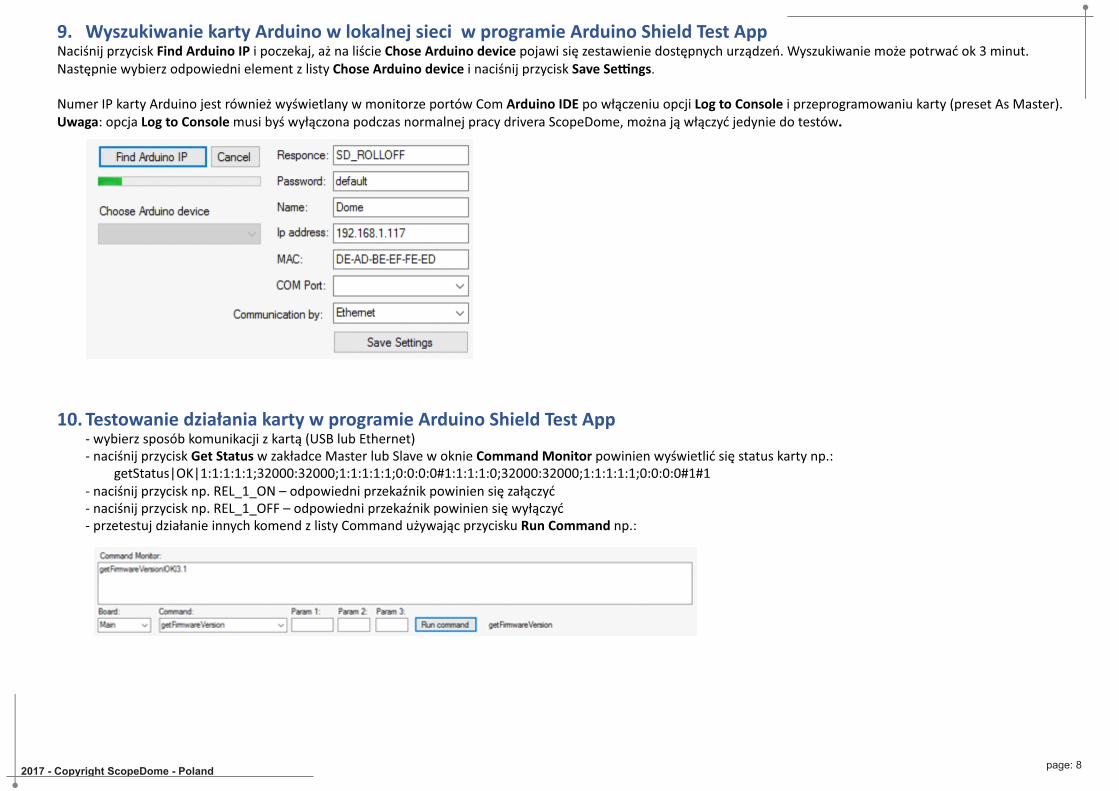
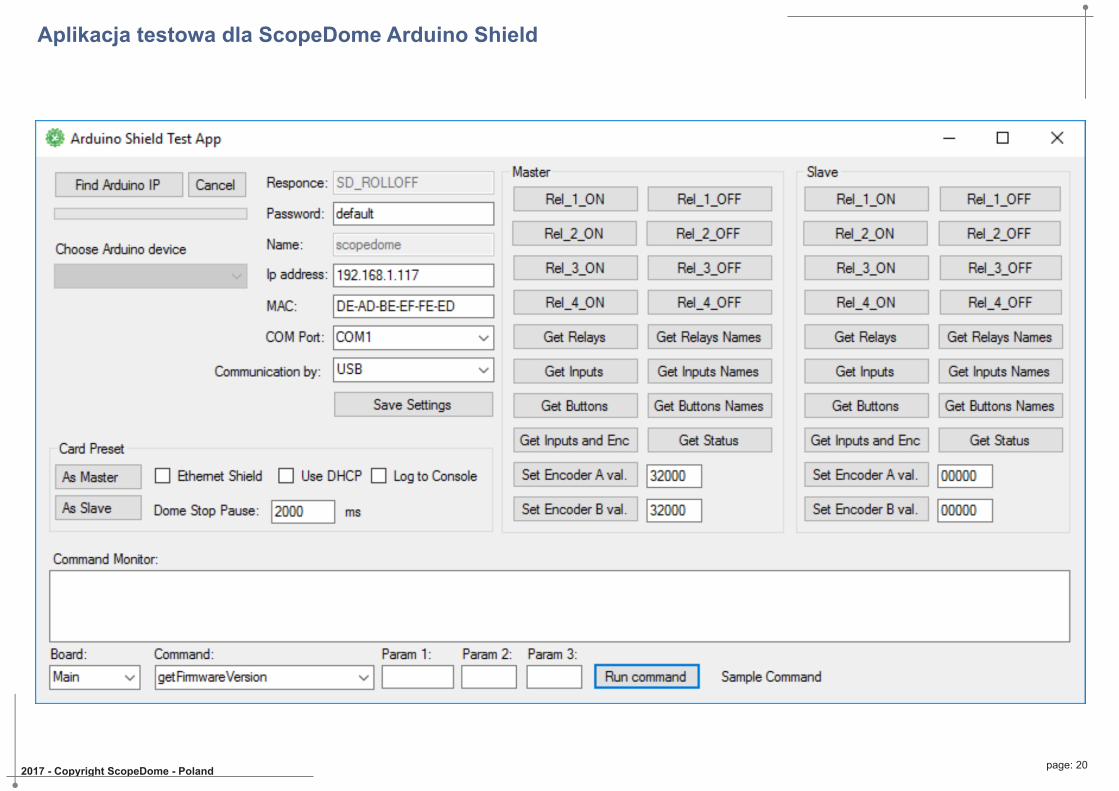
9. Wyszukiwanie karty Arduino w lokalnej sieci w programie Arduino Shield Test AppNaciśnij przycisk Find Arduino IP i poczekaj, aż na liście Chose Arduino device pojawi się zestawienie dostępnych urządzeń. Wyszukiwanie może potrwać ok 3 minut. Następnie wybierz odpowiedni element z listy Chose Arduino device i naciśnij przycisk Save Se�ngs.
Numer IP karty Arduino jest również wyświetlany w monitorze portów Com Arduino IDE po włączeniu opcji Log to Console i przeprogramowaniu karty (preset As Master).Uwaga: opcja Log to Console musi byś wyłączona podczas normalnej pracy drivera ScopeDome, można ją włączyć jedynie do testów.
10. Testowanie działania karty w programie Arduino Shield Test App - wybierz sposób komunikacji z kartą (USB lub Ethernet)
- naciśnij przycisk Get Status w zakładce Master lub Slave w oknie Command Monitor powinien wyświetlić się status karty np.: getStatus|OK|1:1:1:1:1;32000:32000;1:1:1:1:1;0:0:0:0#1:1:1:1:0;32000:32000;1:1:1:1:1;0:0:0:0#1#1
- naciśnij przycisk np. REL_1_ON – odpowiedni przekaźnik powinien się załączyć - naciśnij przycisk np. REL_1_OFF – odpowiedni przekaźnik powinien się wyłączyć - przetestuj działanie innych komend z listy Command używając przycisku Run Command np.:
2017 - Copyright ScopeDome - Poland page: 9
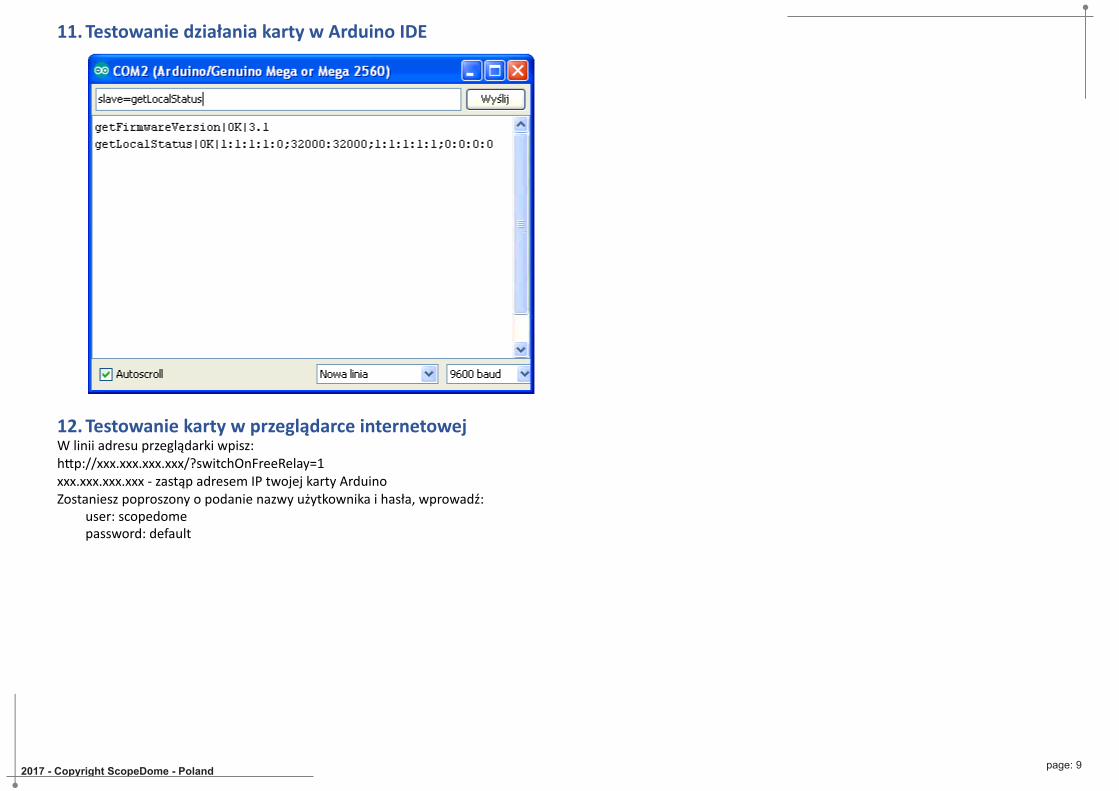
11. Testowanie działania karty w Arduino IDE
12. Testowanie karty w przeglądarce internetowejW linii adresu przeglądarki wpisz:h�p://xxx.xxx.xxx.xxx/?switchOnFreeRelay=1xxx.xxx.xxx.xxx - zastąp adresem IP twojej karty ArduinoZostaniesz poproszony o podanie nazwy użytkownika i hasła, wprowadź:
user: scopedome password: default
2017 - Copyright ScopeDome - Poland page: 10
13. Programowanie trybu działania karty w programie Arduino Shield Test AppProgramowanie trybu działania karty oraz ustawień połączenia internetowego jest możliwe tylko poprzez port USB w programie Arduino Shield Test App. Przed zaprogramowaniem karty należy połączyć ją z komputerem poprzez łącze USB, a w oprogramowaniu sterującym wybrać odpowiedni numer portu COM do komunikacji z kartą. a) jako Master – Strowanie kopuły:
- uruchom program Arduino Shield Test App - wybierz port USB do którego jest podłączona karta - wybierz opcję Communica�on By: USB - zaznacz opcję: Ethernet Shield (o ile ten moduł jest podłączony) - naciśnij przycisk Card Preset > As Master
b) jako Slave – Sterowanie klapy kopuły: - uruchom program Arduino Shield Test App - wybierz port USB do którego jest podłączona karta - wybierz opcję Communica�on By: USB - odznacz opcję: Ethernet Shield - naciśnij przycisk Card Preset > As Slave
c) jako Slave – sterowanie obserwatorium RollOff Roof: - uruchom program Arduino Shield Test App - wybierz port USB do którego jest podłączona karta - wybierz opcję Communica�on By: USB - zanacz opcję: Ethernet Shield (o ile ten moduł jest podłączony) - naciśnij przycisk Card Preset > As Slave
d) parowanie modułów BlueTooth - podłącz zasilanie dla obu kart - zaprogramuj karty - jedną jako Master, drugą jako Slave - wyłącz i włącz zasilanie obu kart - poczekaj ok 30 sekund - na obu kartach naciśnij przycisk Pair - parowanie potrwa ok 40 sekund. - jeśli oba moduły BlueTooth skomunikują się prawidłowo, zaczną sygnalizować to mrugając synchronicznie na obu kartach diodą LED
w rytmie Błysk-Błysk – Przerwa (błysk- 0.5s, przerwa 1s)
2017 - Copyright ScopeDome - Poland page: 11
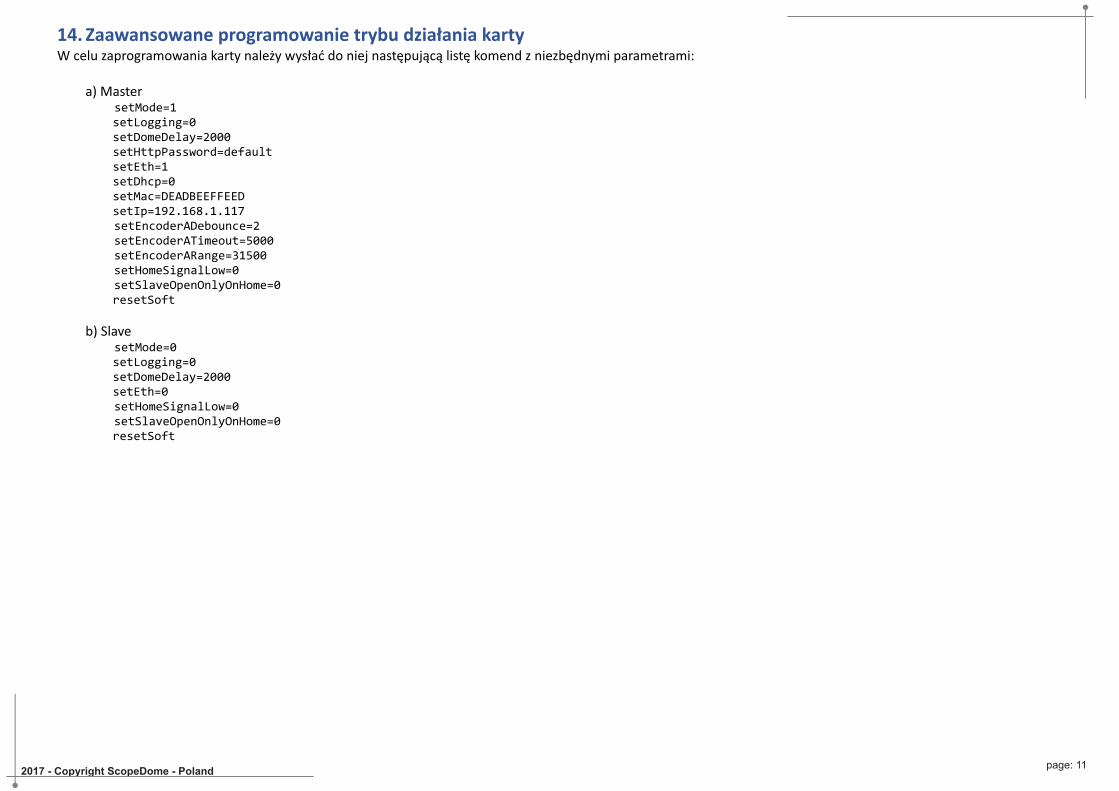
14. Zaawansowane programowanie trybu działania kartyW celu zaprogramowania karty należy wysłać do niej następującą listę komend z niezbędnymi parametrami:
a) Master setMode=1
setLogging=0 setDomeDelay=2000 setHttpPassword=default setEth=1 setDhcp=0 setMac=DEADBEEFFEED setIp=192.168.1.117
setEncoderADebounce=2 setEncoderATimeout=5000 setEncoderARange=31500 setHomeSignalLow=0 setSlaveOpenOnlyOnHome=0 resetSoft
b) Slave setMode=0
setLogging=0 setDomeDelay=2000 setEth=0
setHomeSignalLow=0 setSlaveOpenOnlyOnHome=0 resetSoft
2017 - Copyright ScopeDome - Poland page: 12
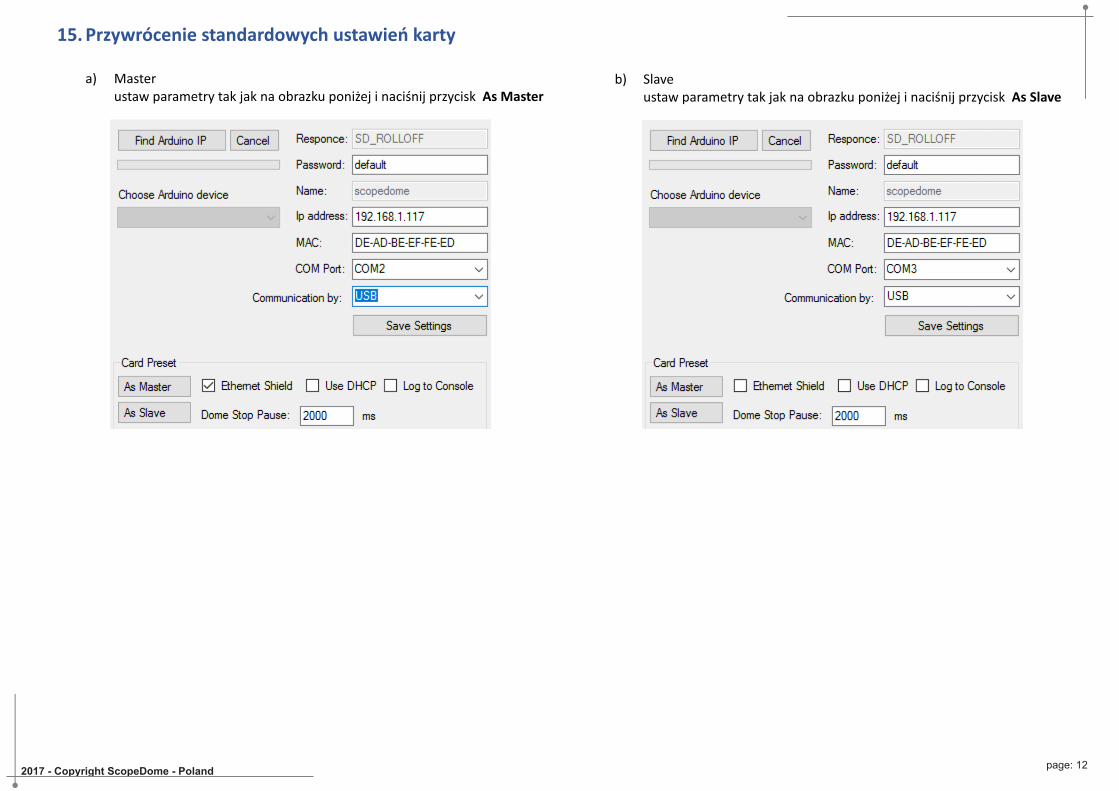
15. Przywrócenie standardowych ustawień karty
a) Master ustaw parametry tak jak na obrazku poniżej i naciśnij przycisk As Master
b) Slave ustaw parametry tak jak na obrazku poniżej i naciśnij przycisk As Slave
2017 - Copyright ScopeDome - Poland page: 13
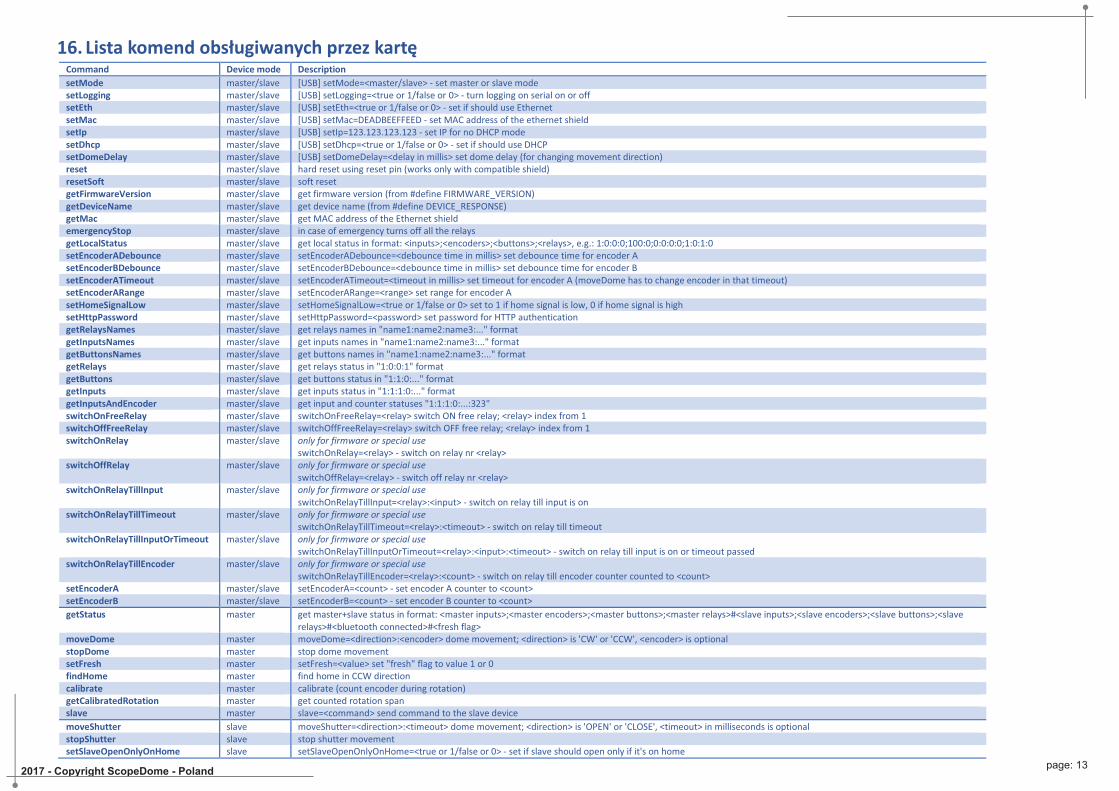
16. Lista komend obsługiwanych przez kartęCommand Device mode Description
setMode master/slave [USB] setMode=<master/slave> - set master or slave mode setLogging master/slave [USB] setLogging=<true or 1/false or 0> - turn logging on serial on or off setEth master/slave [USB] setEth=<true or 1/false or 0> - set if should use Ethernet setMac master/slave [USB] setMac=DEADBEEFFEED - set MAC address of the ethernet shield setIp master/slave [USB] setIp=123.123.123.123 - set IP for no DHCP mode setDhcp master/slave [USB] setDhcp=<true or 1/false or 0> - set if should use DHCP setDomeDelay master/slave [USB] setDomeDelay=<delay in millis> set dome delay (for changing movement direction) reset master/slave hard reset using reset pin (works only with compatible shield) resetSoft master/slave soft reset getFirmwareVersion master/slave get firmware version (from #define FIRMWARE_VERSION) getDeviceName master/slave get device name (from #define DEVICE_RESPONSE) getMac master/slave get MAC address of the Ethernet shield emergencyStop master/slave in case of emergency turns off all the relays getLocalStatus master/slave get local status in format: <inputs>;<encoders>;<buttons>;<relays>, e.g.: 1:0:0:0;100:0;0:0:0:0;1:0:1:0 setEncoderADebounce master/slave setEncoderADebounce=<debounce time in millis> set debounce time for encoder A setEncoderBDebounce master/slave setEncoderBDebounce=<debounce time in millis> set debounce time for encoder B setEncoderATimeout master/slave setEncoderATimeout=<timeout in millis> set timeout for encoder A (moveDome has to change encoder in that timeout) setEncoderARange master/slave setEncoderARange=<range> set range for encoder A setHomeSignalLow master/slave setHomeSignalLow=<true or 1/false or 0> set to 1 if home signal is low, 0 if home signal is high setHttpPassword master/slave setHttpPassword=<password> set password for HTTP authentication getRelaysNames master/slave get relays names in "name1:name2:name3:..." format getInputsNames master/slave get inputs names in "name1:name2:name3:..." format getButtonsNames master/slave get buttons names in "name1:name2:name3:..." format getRelays master/slave get relays status in "1:0:0:1" format getButtons master/slave get buttons status in "1:1:0:..." format getInputs master/slave get inputs status in "1:1:1:0:..." format getInputsAndEncoder master/slave get input and counter statuses "1:1:1:0:...:323" switchOnFreeRelay master/slave switchOnFreeRelay=<relay> switch ON free relay; <relay> index from 1 switchOffFreeRelay master/slave switchOffFreeRelay=<relay> switch OFF free relay; <relay> index from 1 switchOnRelay master/slave only for firmware or special use
switchOnRelay=<relay> - switch on relay nr <relay> switchOffRelay master/slave only for firmware or special use
switchOffRelay=<relay> - switch off relay nr <relay> switchOnRelayTillInput master/slave only for firmware or special use
switchOnRelayTillInput=<relay>:<input> - switch on relay till input is on switchOnRelayTillTimeout master/slave only for firmware or special use
switchOnRelayTillTimeout=<relay>:<timeout> - switch on relay till timeout switchOnRelayTillInputOrTimeout master/slave only for firmware or special use
switchOnRelayTillInputOrTimeout=<relay>:<input>:<timeout> - switch on relay till input is on or timeout passed switchOnRelayTillEncoder master/slave only for firmware or special use
switchOnRelayTillEncoder=<relay>:<count> - switch on relay till encoder counter counted to <count> setEncoderA master/slave setEncoderA=<count> - set encoder A counter to <count> setEncoderB master/slave setEncoderB=<count> - set encoder B counter to <count>
getStatus master get master+slave status in format: <master inputs>;<master encoders>;<master buttons>;<master relays>#<slave inputs>;<slave encoders>;<slave buttons>;<slave relays>#<bluetooth connected>#<fresh flag>
moveDome master moveDome=<direction>:<encoder> dome movement; <direction> is 'CW' or 'CCW', <encoder> is optional stopDome master stop dome movement setFresh master setFresh=<value> set "fresh" flag to value 1 or 0 findHome master find home in CCW direction calibrate master calibrate (count encoder during rotation) getCalibratedRotation master get counted rotation span slave master slave=<command> send command to the slave device
moveShutter slave moveShutter=<direction>:<timeout> dome movement; <direction> is 'OPEN' or 'CLOSE', <timeout> in milliseconds is optional stopShutter slave stop shutter movement setSlaveOpenOnlyOnHome slave setSlaveOpenOnlyOnHome=<true or 1/false or 0> - set if slave should open only if it's on home
2017 - Copyright ScopeDome - Poland page: 14
1
6
RM
40-5
V
LE
D1
D1
R1
R2
T1
RM
40-5
V1
LE
D2
D2
R3
R4
T2
RM
40-5
V2
LE
D3
D3
R5
R6T3
RM
40-5
V3
LE
D4
D4
R7
R8
T4
X1 X2 X3 X4 X6
X7 X8
PH
AS
E_
AP
HA
SE
_B
HO
ME
_S
EN
SO
RS
V1
SV
2
SV
3
SV
4
SV5SV6SV7
SV8
D6D5 D7D8 D9D10 D11D12
U1
IC1
C1
C2
LE
D5
R1
6
SV
9
R1
7 R1
8
C3
R1
0
R11
R1
2 C4
R1
3
R1
4 C5
R15
R19
C6
R20
R21
R2
2R
23
C7
R2
4
R2
5
C8
R2
6
R2
7 C9
X9
R2
8
R2
9
C1
0
R3
0
R3
1
C11
R3
2
R3
3
C1
2
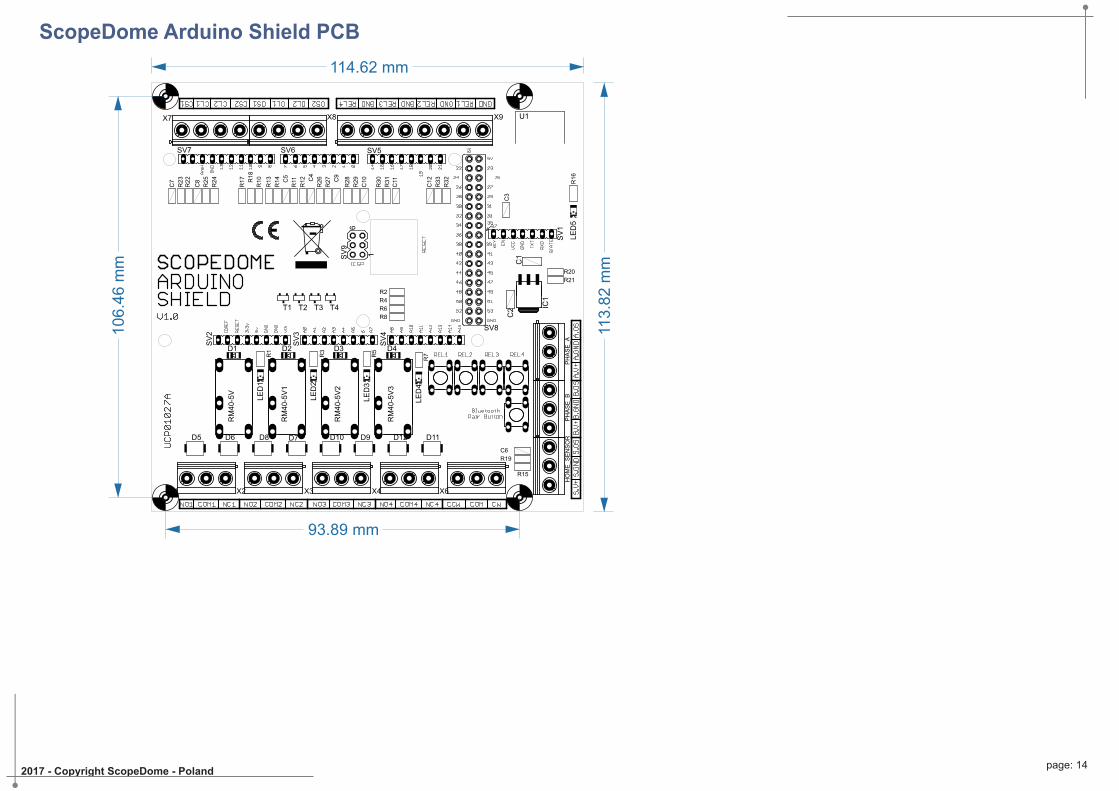
ScopeDome Arduino Shield PCB
114.62 mm
113.8
2 m
m
93.89 mm
106.4
6 m
m
2017 - Copyright ScopeDome - Poland page: 15
ScopeDome Limit Switch Module
Oc1
Oc2
No1
No2
No1
Oc1
Oc2
No2
ScopeDome Limit Switch Module
Oc1
Oc2
No1
No2
No1
Oc1
Oc2
No2
ScopeDome 3x IO Expander
GND
V+
OS
OS
GND
V+
ScopeDome 3x IO Expander
GND
V+
OS
OS
GND
V+
ScopeDome Home SensorModule
OS
GND
V+
ScopeDome Encoder Module
OS
GND
V+
GND
GND
GND
GND
GND
L
RE
SE
T
RX
TX
0123456789
10
1112
13
A0
A1
A2
A3
A4
A5
6 A7
A8
A9
A10
A11
A12
A13
A14
A15
www.arduino.cc
22
24
26
28
30 31
32 33
34 35
36 37
38 39
4140
4342
45
47
49
MOSI
44
46
MISO
48
SSSCK
TM
ANALOG IN
COMMUNICATIONA
RE
F
GN
D
TX
0
RX
0
Arduino
RE
SE
T
3V
3
5V
VIN
GN
D
GN
D
SD
A 2
0
SC
L 2
1
1
TX
2 1
6
RX
2 1
7
RX
3 1
5
TX
3 1
4
RX
1 1
9
TX
1 1
8
PWM
5V
GND
DIG
ITA
LMEGA 2560
IOREF
ON
for Android
Dom
e F
ront
Clo
se S
en
so
rL
imit S
witc
h
Dom
e F
ront
Op
en
Sen
so
rL
imit S
witc
h
to themotor
inverter
CW/Open
CCW/Close
COM
B-REL1
B-REL2
B-REL3
B-REL4
Re
lays O
N/O
FF
bu
tton
s
+5V
Bluetooth Pair Button
40
42
44
46
3840
46
4442
Bluetooth Pair Button
18 19
40
42
44
46
1617
23
GND
+5V
2527
TXD
RXD
GND
VCC
STATE
EN
BlueToothLevel 5.0V
Power 3.6V-6V
Bluetooth Master/Slave HC05 ARDUINO AVR ARM
BlueTooth1617
23
GND+5V
25
27
GND
GND
3537
37
39
39
GND
18GND
+5VPhase B
ScopeDome Encoder Module
OS
GND
V+ Phase A
19GND
+5V
GND35
+5V
38
41434547
VCC
Yw
Ro
bo
t 4
Re
lay
Mo
du
le
GND
In1
In2
In3
In4
Re
lay
5V
DC
10
A
NO
CO
MN
C
Re
lay
5V
DC
10
A
NO
CO
MN
C
Re
lay
5V
DC
10
A
NO
CO
MN
C
Re
lay
5V
DC
10
A
NO
CO
MN
C
RE
L1
RE
L2
RE
L3
RE
L4
GND
+5V41434547
REL1
REL2
REL3
REL4
REL4-NC
REL4-COM
REL4-NO
REL1-NC
REL1-COM
REL1-NO
REL2-NC
REL2-COM
REL2-NO
REL3-NC
REL3-COM
REL3-NO
ZW
EA-OS
EA-GND
EA-V+
EB-OS
EB-GND
EB-V+
H-OS
H-GND
H-V+
CS_1
CS_2
CL_1
CL_2
OS_1
OS_2
OL_1
OL_2
ScopeDome 3x IO Expander
GND
V+
OS
OS
GND
V+
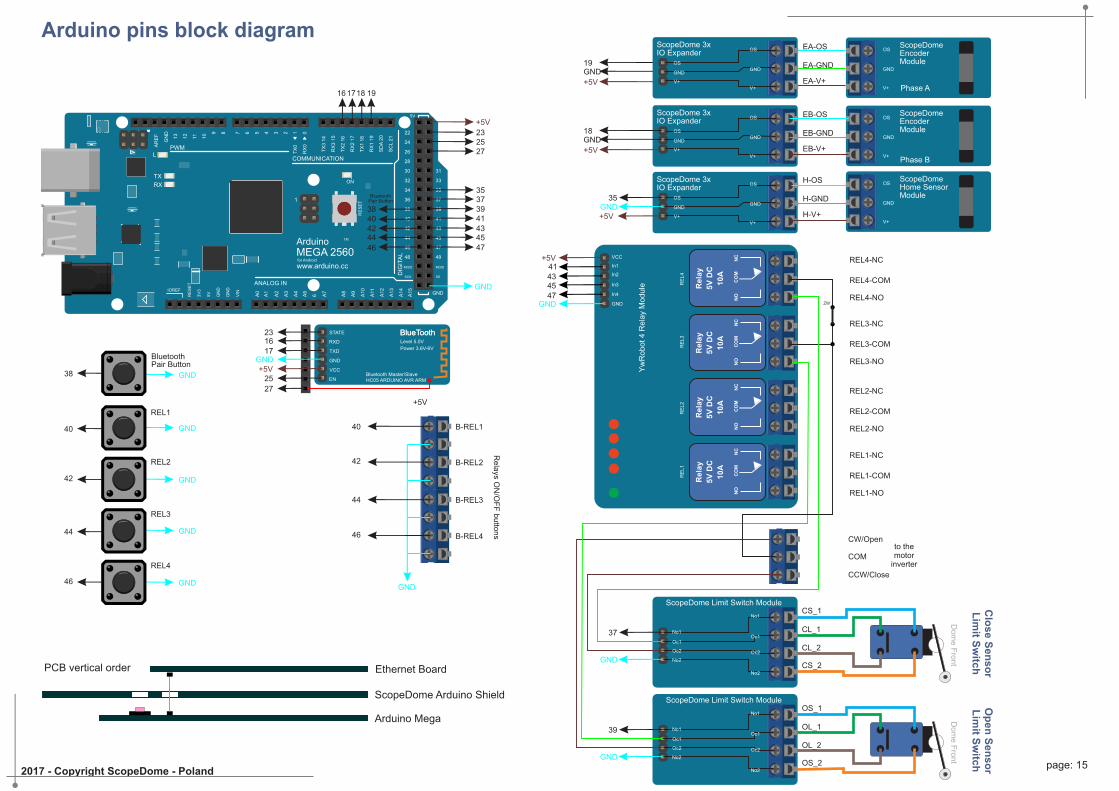
ScopeDome Arduino Shield
Arduino Mega
Ethernet BoardPCB vertical order
Arduino pins block diagram
2017 - Copyright ScopeDome - Poland page: 16
ScopeDom Encoder, Home Sensor Relays buttons Limit switch sensorRelays
Arduino MEGA 2560
Bluetooth HC-05 Buttons relays
PE005
GR
N LL4148
270
1k
BC847
GND
PE005
GR
N LL4148
270
1k
BC847
GND
PE005
GR
N LL4148
270
1k
BC847
GND
PE005
GR
N LL4148
270
1k
BC847
GND
MKDSN1,5/3-5,08
MKDSN1,5/3-5,08
MKDSN1,5/3-5,08
MKDSN1,5/3-5,08
DTS-6
DTS-6
DTS-6
DTS-6
GND
GND
GND
GND
DTS-6
GND
MKDSN1,5/3-5,08
MKDSN1,5/4-5,08
MKDSN1,5/4-5,08
GND
GND
MKDSN1,5/3-5,08
MKDSN1,5/3-5,08
MKDSN1,5/3-5,08
GND
+5V
+5V
GND
+5V
GND
+5V
+5V
+5V
+5V
+5V
SMBJ440CASMBJ440CA
SMBJ440CASMBJ440CA
SMBJ440CASMBJ440CA
SMBJ440CASMBJ440CA
ZW
HC_05
LM1117-3.3
GND
+5V +3V
3
10uF
10uF
GND GND
+3V
3
GND
GND
GND GR
N4.7
k
GND
1k 2k
GND
100nF
GND
1k
4.7k 4.7k
10n
+5V
GND
4.7k 4.7k
10n
+5V
GND
4.7k 4.7k
10n
+5V
GND
1k 2k
GND
4.7k 4.7k
10n
+5V
GND
4.7k 4.7k
10n
+5V
GND
4.7k 4.7k
100n
+5V
GND
MKDSN1,5/8-5,084.7k 4.7k
100n
+5V
GND
4.7k 4.7k
100n
+5V
GND
4.7k 4.7k
100n+
5V
GNDGND
GND
+5V
GNDGND
A1
A2
RM40-5V 12
11
14
RM40-5V
LE
D1 D1
R1
R2
T1
A1
A2
RM40-5V1 12
11
14
RM40-5V1
LE
D2 D2
R3
R4
T2
A1
A2
RM40-5V2 12
11
14
RM40-5V2
LE
D3 D3
R5
R6
T3
A1
A2
RM40-5V3 12
11
14
RM40-5V3
LE
D4 D4
R7
R8
T4
X1-1
X1-2
X1-3
X2-1
X2-2
X2-3
X3-1
X3-2
X3-3
X4-1
X4-2
X4-3
1 342
REL1
1 342
REL2
1 342
REL3
1 342
REL4
1 342
BLUETOOTH
X6-1
X6-2
X6-3
X7-1
X7-2
X7-3
X7-4
X8-1
X8-2
X8-3
X8-4
PHASE_A-1
PHASE_A-2
PHASE_A-3
PHASE_B-1
PHASE_B-2
PHASE_B-3
HOME_SENSOR-1
HOME_SENSOR-2
HOME_SENSOR-3
12345
SV1
67
1 2 3 4 5 6 7 8
SV
2
1 2 3 4 5 6 7 8
SV
3
1 2 3 4 5 6 7 8
SV
4
12345678S
V5
12345678S
V6
12345678910
SV
7
135
246
79
810
111315
121416
1719
1820
212325
222426
2729
2830
3133
3234
SV835 36
D6D5
D7D8
D9D10
D11D12
R9
TX1
RX2
CTS3
RTS4
PCM_CLK5
PCM_OUT6
PCM_IN7
PCN_SYNC8
AIO09
AIO110
RST11
3V312
GND13 NC
14
VB
US
D-
15
CS
B16
MO
SI
17
MIS
O18
CLK
19
VB
US
D+
20
GN
D1
21
GND2 22PIO0 23PIO1 24PIO2 25PIO3 26PIO4 27PIO5 28PIO6 29PIO7 30PIO8 31PIO9 32
PIO10 33PIO11 34
U1
IC1GND
IN OUT
C1
C2
LE
D5
R16
135
SV9
246
R17 R18
C3
R10
R11 R12
C4
R13 R14
C5
R15 R19
C6
R20 R21
R22 R23
C7
R24 R25
C8
R26 R27
C9
X9-1
X9-2
X9-3
X9-4
X9-5
X9-6
X9-7
X9-8
R28 R29
C10
R30 R31
C11
R32 R33
C12
PIN_41
PIN_41
REL1-COM
REL1-COM
REL1-NC
REL1-NC
REL1-NO
REL1-NO
PIN_43
PIN_43
PIN_45
PIN_45
PIN_47
PIN_47
REL2-NOREL2-NO
REL2-NC
REL2-NC
REL2-COM
REL2-COM
REL3-NO
REL3-NO
REL3-NO
REL3-NC
REL3-NC
REL3-COM
REL3-COM
REL4-NO
REL4-NO
REL4-NO
REL4-NC
REL4-NC
REL4-COM
REL4-COM
PIN_40
PIN_40
PIN_40
PIN_42
PIN_42
PIN_42
PIN_44
PIN_44
PIN_44
PIN_46
PIN_46
PIN_46
PIN_38
PIN_38
PIN
_1
9
PIN_19
PIN
_1
8
PIN_18
PIN_35
PIN_35
PIN_23
PIN_23
PIN_16
PIN_16
PIN_16
PIN_25
PIN_25
PIN_27PIN_27
TXT_ARDUINO
TXT_ARDUINO
PIN_17
PIN_17
PIN_17 KEY
KEY
KEY
PIN_37
PIN_37
PIN_39
PIN_39
Close sensor limit switch
Open sensor limit switch
Bluetooth
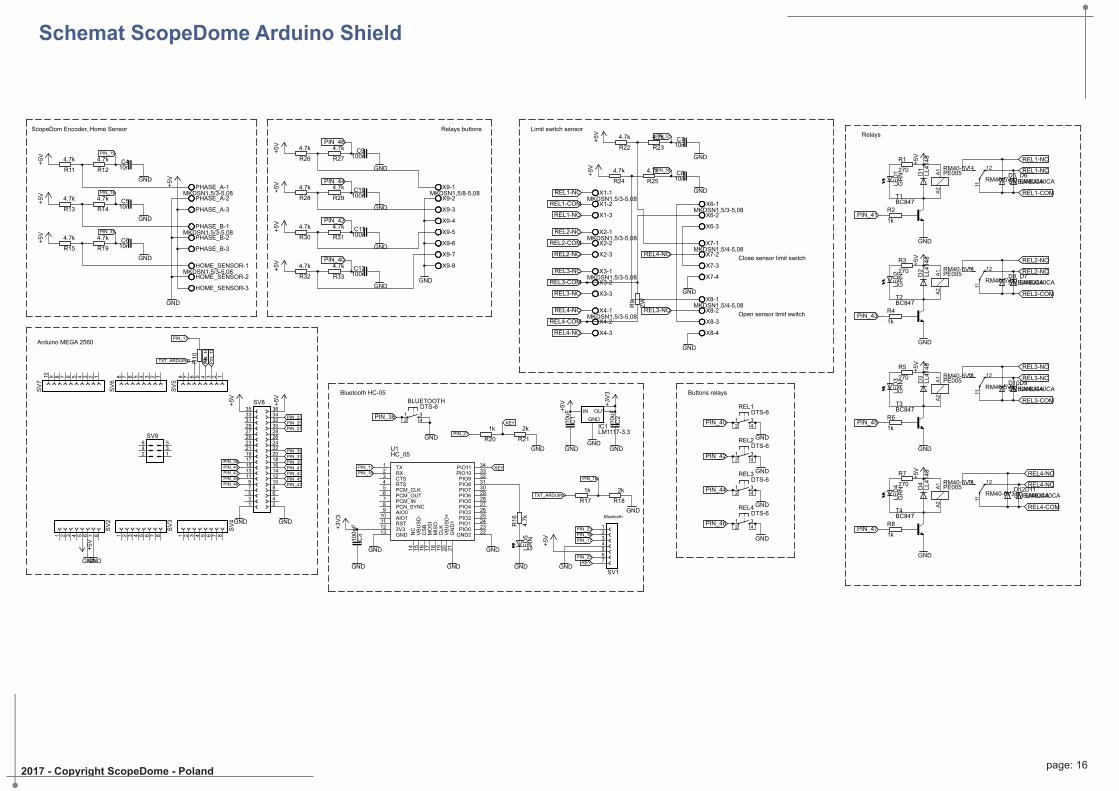
Schemat ScopeDome Arduino Shield
2017 - Copyright ScopeDome - Poland page: 17
1
6
RM
40-5
V
RM
40-5
V1
RM
40-5
V2
RM
40-5
V3
PH
AS
E_A
PH
AS
E_B
HO
ME
_S
EN
SO
R
SV002iE5-1C
Close SensorLimit Switch
Dome FrontOpen SensorLimit Switch
Dome Top
CWCCW
Buttons
Telesc.CCD
Dome Drive120W/3Phase
1
6
RM
40-5
V
RM
40-5
V1
RM
40-5
V2
RM
40-5
V3
PH
AS
E_A
PH
AS
E_B
HO
ME
_S
EN
SO
R
Encoder
1 2
3 4
1 2
3 4
OpenClose
Buttons
LightFan
OS
GND
V+
Home SensorOS
GND
V+
Dome PartMain
Shutter PartSlave
EncoderOS
GND
V+
L
NPE
23
0V
AC
P1 P2CM
U V W
PE
Inverter
MPEU V W
SV002iE5-1C
Shutter Drive120W/3Phase
L
NPE
23
0V
AC
P1 P2CM
U V W
PE
Inverter
MPEU V W
230VAC
EMIFilter
FEG8003
Lin
e
Load 230VAC
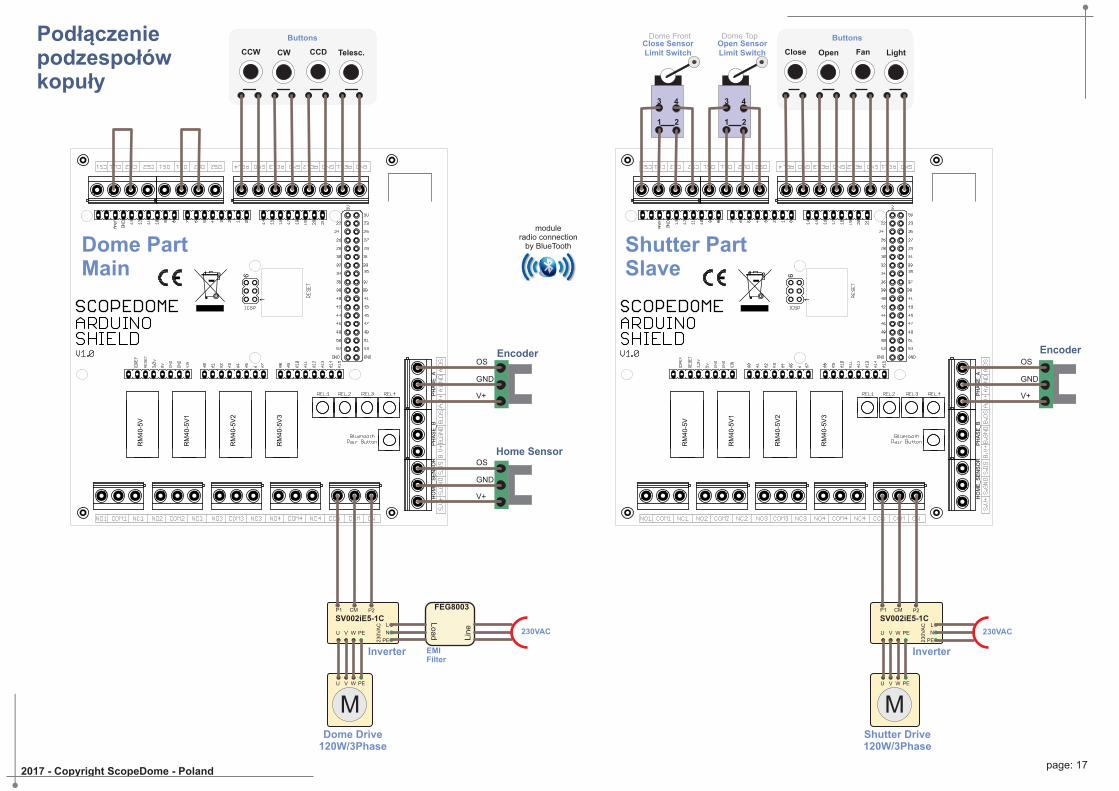
Podłączeniepodzespołów kopuły
module radio connection
by BlueTooth
2017 - Copyright ScopeDome - Poland page: 18
Close SensorLimit Switch
Dome FrontOpen SensorLimit Switch
Dome Top
1
6
RM
40-5
V
RM
40-5
V1
RM
40-5
V2
RM
40-5
V3
PH
AS
E_A
PH
AS
E_B
HO
ME
_S
EN
SO
R
1 2
3 4
1 2
3 4
OpenClose
Buttons
LightFan
Shutter PartSlave
EncoderOS
GND
V+
SV002iE5-1C
Roof Drive120W/3Phase
L
NPE2
30
VA
C
P1 P2CM
U V W
PE
Inverter
MPEU V W
230VAC
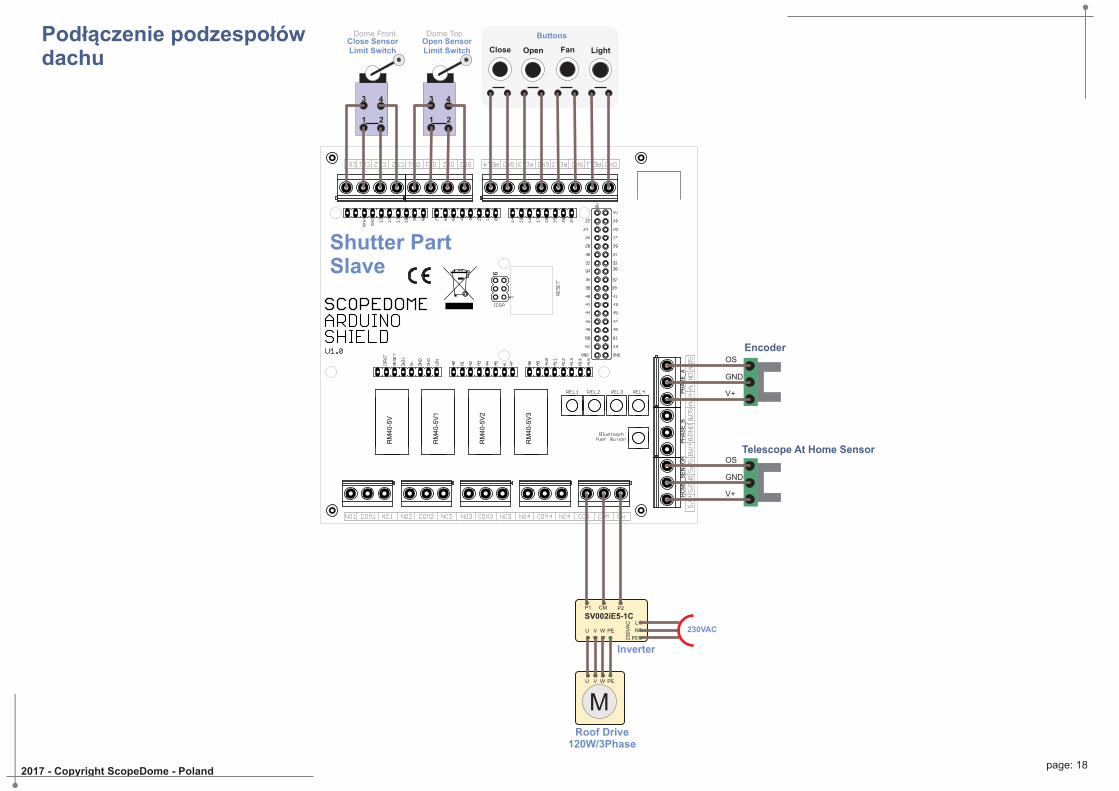
Podłączenie podzespołówdachu
Telescope At Home SensorOS
GND
V+
2017 - Copyright ScopeDome - Poland page: 19
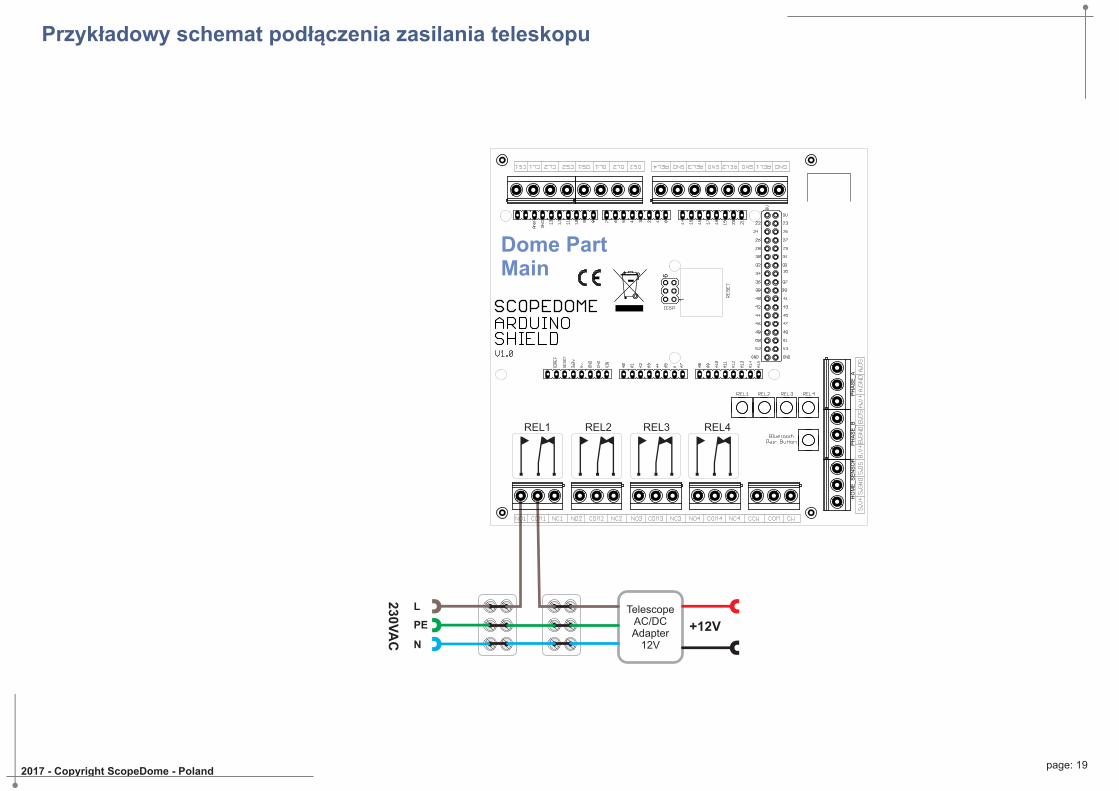
Przykładowy schemat podłączenia zasilania teleskopu
TelescopeAC/DCAdapter
12V
+12V
230V
AC
1
6
PH
AS
E_A
PH
AS
E_B
HO
ME
_S
EN
SO
R
Dome PartMain
REL1 REL2 REL3 REL4
L
PE
N
2017 - Copyright ScopeDome - Poland page: 20
Aplikacja testowa dla ScopeDome Arduino Shield
2017 - Copyright ScopeDome - Poland page: 21
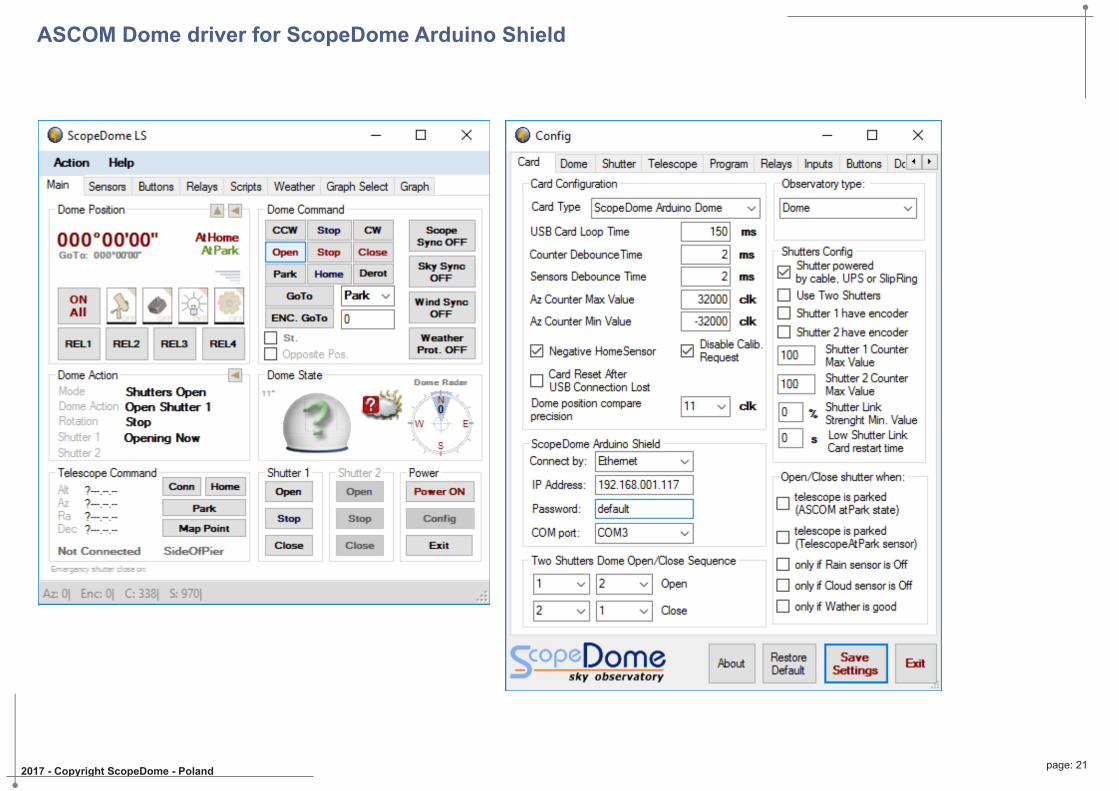
ASCOM Dome driver for ScopeDome Arduino Shield
2017 - Copyright ScopeDome - Poland page: 22
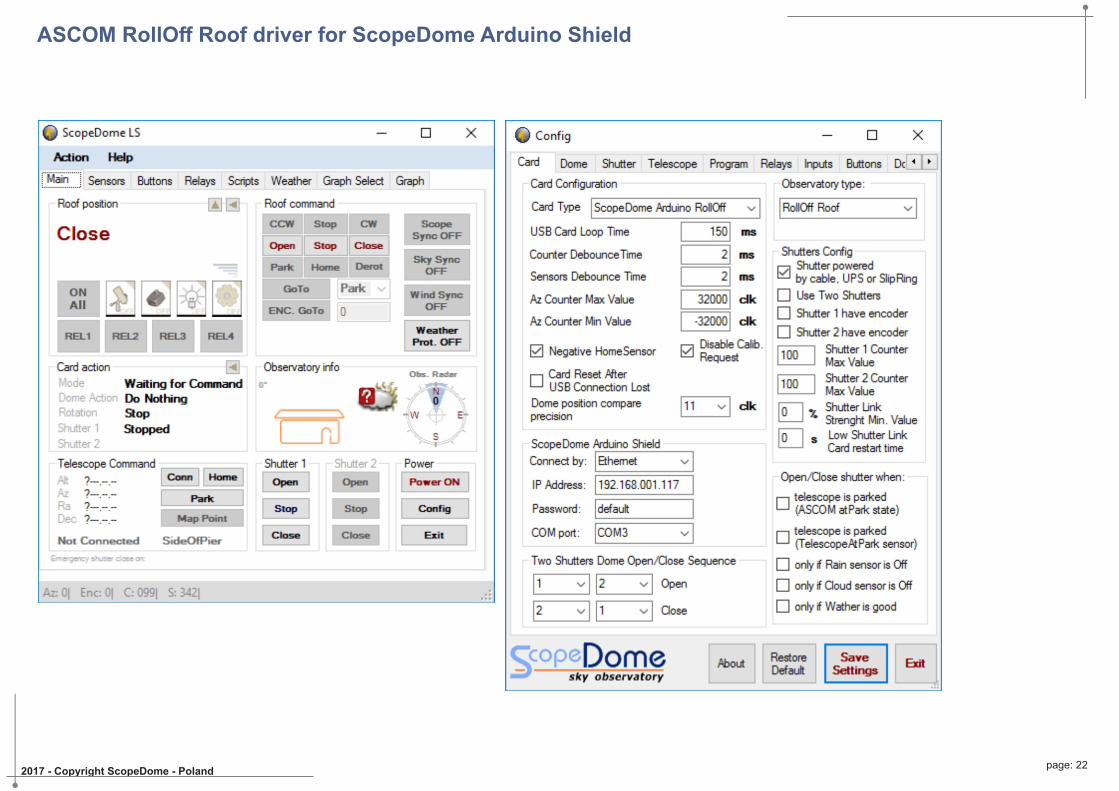
ASCOM RollOff Roof driver for ScopeDome Arduino Shield
2017 - Copyright ScopeDome - Poland page: 23
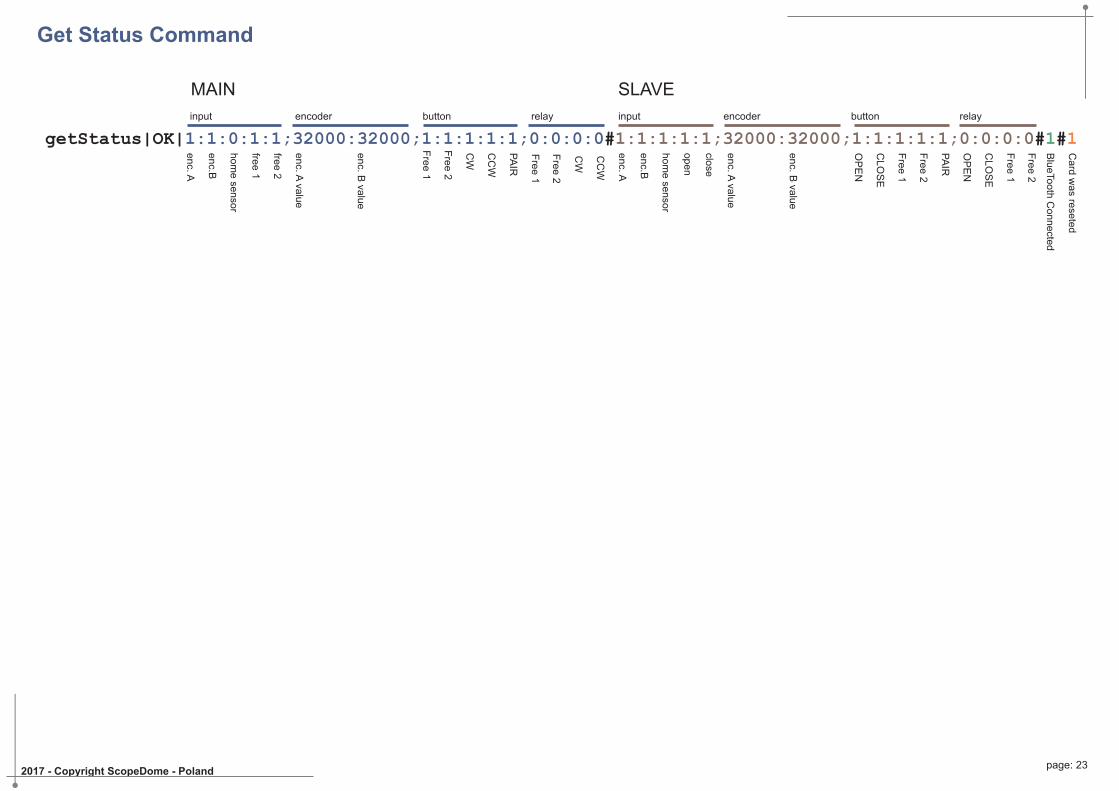
getStatus|OK| # # #1:1:0:1:1;32000:32000;1:1:1:1:1;0:0:0:0 1:1:1:1:1;32000:32000;1:1:1:1:1;0:0:0:0 1 1
input encoder button relay input encoder button relay
MAIN SLAVE
en
c. A
en
c.B
ho
me
sen
sor
free
1
free
2
en
c. A va
lue
en
c. B va
lue
CW
CC
W
Fre
e 1
Fre
e 2
PA
IR
CW
CC
W
Fre
e 1
Fre
e 2
en
c. A
en
c.B
ho
me
sen
sor
op
en
close
en
c. A va
lue
en
c. B va
lue
OP
EN
CL
OS
E
Fre
e 1
Fre
e 2
PA
IR
OP
EN
CL
OS
E
Fre
e 1
Fre
e 2
Blu
eTo
oth
Co
nn
ecte
d
Ca
rd w
as re
sete
dGet Status Command