Robot_KUKA KRC2 Instrukcja Programowania
128
V1.1 20.07.200 Stan: 20.07.2006 Wersja: 1.1 KUKA Robot Group KUKA System Software (KSS) Instrukcja obsługi i programowania Dla użytkownika końcowego Dla KUKA System Software V5.2, V5.3, V5.4
description
kuka programowanie
Transcript of Robot_KUKA KRC2 Instrukcja Programowania
V1.1 20.07.200
Stan: 20.07.2006 Wersja: 1.1
KUKA Robot Group
KUKA System Software (KSS)
Instrukcja obsługi i programowaniaDla użytkownika końcowego
Dla KUKA System Software V5.2, V5.3, V5.4
© Copyright 2006
KUKA Roboter GmbHZugspitzstraße 140D-86165 AugsburgNiemcy
Niniejsza dokumentacja może być powielana i udostępniana osobom trzecim – także we fragmentach – wyłącznie za jednoznaczną zgodą KUKA ROBOT GROUP.
Układ sterowania może posiadać dalsze, nie opisane w niniejszej dokumentacji funkcje. Przy dostawie nowego układu sterowania i/lub w przypadku serwisowym klient nie ma jednak prawa żądać udostępnienia mu tych funkcji.
Treść publikacji została sprawdzona pod względem zgodności z opisanym osprzętem i oprogramowaniem. Mimo to nie jest możliwe całkowite wykluczenie różnic, w związku z czym nie gwarantujemy całkowitej zgodności dokumentacji ze stanem faktycznym. Informacje zawarte w niniejszej publikacji są jednak regularnie sprawdzane, a wymagane poprawki są uwzględniane w kolejnych wydaniach.
Zastrzega się możliwość wprowadzania zmian technicznych, nie mających wpływu na działanie produktu.
KIM-PS4-DOC
V0.4 22.03.2006 pub de
Instrukcja obsługi i programowania
2 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
Spis tresci
1 Wstęp ................................................................................................................ 7
1.1 Użytkownik dokumentacji ............................................................................................... 71.2 Dokumentacja systemu robota ....................................................................................... 71.3 Symbole wskazówek ...................................................................................................... 71.4 Znaki towarowe ............................................................................................................... 7
2 Opis produktu .................................................................................................. 9
2.1 Przegląd systemu robota ................................................................................................ 92.2 Przegląd oprogramowania systemowego firmy KUKA (KSS) ......................................... 9
3 Bezpieczeństwo ............................................................................................... 11
3.1 Reakcje powodujące zatrzymanie systemu .................................................................... 113.2 Oznaczenia systemu robota ........................................................................................... 123.3 Informacja dot. bezpieczeństwa ..................................................................................... 123.4 Planowanie instalacji ...................................................................................................... 123.4.1 Deklaracja zgodności z normami WE i deklaracja producenta .................................. 123.4.2 Miejsce ustawienia ..................................................................................................... 133.4.3 Symulacja .................................................................................................................. 133.4.4 Strefa robocza, strefa bezpieczeństwa i strefa zagrożenia ....................................... 133.4.5 Zewnętrzne urządzenia zabezpieczające .................................................................. 143.5 Zabezpieczenia systemu robota ..................................................................................... 153.5.1 Przegląd urządzeń zabezpieczających ...................................................................... 153.5.2 Logiczny układ bezpieczeństwa ESC ........................................................................ 153.5.3 Wejście do ochrony operatora ................................................................................... 163.5.4 Podłączenie zewnętrznego przycisku zatwierdzającego ........................................... 163.5.5 Przycisk WYŁĄCZENIA AWARYJNYEGO ................................................................ 163.5.6 Przycisk zatwierdzający ............................................................................................. 173.5.7 Przełącznik trybów roboczych ................................................................................... 183.5.8 Tryb impulsowy .......................................................................................................... 193.5.9 Mechaniczne ograniczniki krańcowe ......................................................................... 193.5.10 Programowy wyłącznik krańcowy .............................................................................. 203.5.11 Układ monitorowania zakresu osi (opcja) .................................................................. 203.5.12 Mechaniczny ogranicznik zakresu osi (opcja) ........................................................... 203.5.13 Mechanizm swobodnego obrotu (opcja) .................................................................... 203.5.14 KUKA.SafeRobot (opcja) ........................................................................................... 213.6 Personal .......................................................................................................................... 213.7 Środki bezpieczeństwa ................................................................................................... 233.7.1 Ogólne środki bezpieczeństwa .................................................................................. 233.7.2 Transport ................................................................................................................... 233.7.3 Uruchamianie ............................................................................................................. 233.7.4 Ochrona antywirusowa i bezpieczeństwo sieci .......................................................... 243.7.5 Programowanie .......................................................................................................... 243.7.6 Tryb automatyczny .................................................................................................... 253.7.7 Konserwacja i naprawa .............................................................................................. 253.7.8 Wycofanie z eksploatacji, składowanie i usuwanie .................................................... 27
4 Programator KCP ............................................................................................. 29
Spis tresci
3 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
4.1 Strona przednia .............................................................................................................. 294.2 Klawiatura ....................................................................................................................... 304.3 Blok klawiszy numerycznych .......................................................................................... 314.4 Strona tylna ..................................................................................................................... 32
5 Interfejs graficzny KUKA.HMI ......................................................................... 33
5.1 Klawisze stanu, klawisze menu, klawisze programowe .................................................. 335.2 Okna na interfejsie graficznym ....................................................................................... 345.3 Elementy na interfejsie graficznym ................................................................................. 355.4 Pasek statusu ................................................................................................................. 365.5 Korzystanie z pomocy online .......................................................................................... 37
6 Obsługa ............................................................................................................. 39
6.1 Włączanie układu sterowania robota .............................................................................. 396.2 Wyłączanie układu sterowania robota ............................................................................ 396.3 Zmiana grupy użytkowników ........................................................................................... 396.4 Tryby robocze ................................................................................................................. 396.5 Układy współrzędnych .................................................................................................... 406.6 Ręczne przesuwanie robota ........................................................................................... 426.6.1 Ustawianie Hand-Override (HOV) ............................................................................ 436.6.2 Wybór narzędzia i podstawy ...................................................................................... 436.6.3 Przesuwanie w odniesieniu do osi przy pomocy klawiszy ruchowych ....................... 446.6.4 Przesuwanie kartezyjskie przy pomocy klawiszy ruchowych .................................... 446.6.5 Konfiguracja SpaceMouse ......................................................................................... 446.6.6 Wyjustowanie SpaceMouse ....................................................................................... 466.6.7 Przesuw kartezjański przy pomocy SpaceMouse ...................................................... 476.6.8 Przyrostowy przesuw ręczny ..................................................................................... 476.7 Wyłączanie funkcji monitorowania zakresu roboczego .................................................. 496.8 Funkcje wyświetlania ...................................................................................................... 496.8.1 Przegląd funkcji wyświetlania .................................................................................... 496.8.2 Wyświetlanie pozycji rzeczywistej ............................................................................. 506.8.3 Wyświetlanie cyfrowych wejść/wyjść ......................................................................... 506.8.4 Wyświetlanie analogowych wejść/wyjść .................................................................... 516.8.5 Wyświetlanie wejść/wyjść dla automatyki zewnętrznej .............................................. 526.8.6 Wyświetlanie interruptów ........................................................................................... 546.8.7 Wyświetlanie informacji o systemie robota ................................................................ 556.8.8 Wyświetlanie danych robota ...................................................................................... 566.8.9 Wyświetlanie informacji o sprzęcie ............................................................................ 566.9 Archiwizowanie ............................................................................................................... 566.9.1 Formatowanie dyskietki ............................................................................................. 566.9.2 Archiwizacja danych .................................................................................................. 576.9.3 Przywracanie danych ................................................................................................. 58
7 Uruchamianie ................................................................................................... 59
7.1 Przegląd - uruchamianie ................................................................................................. 597.2 Ustawienia systemowe ................................................................................................... 597.2.1 Ustawianie języka interfejsu graficznego ................................................................... 597.2.2 Ustawianie jasności i kontrastu interfejsu graficznego .............................................. 597.3 Sprawdzanie danych maszyny ....................................................................................... 60
4 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
Spis tresci
7.4 Kalibracja ........................................................................................................................ 617.4.1 Przegląd - kalibracja .................................................................................................. 617.4.2 Metody kalibracji ........................................................................................................ 627.4.3 Ustawianie osi w pozycji przedkalibracyjnej .............................................................. 637.4.4 Przeprowadzanie pierwszej kalibracji przy pomocy EMT .......................................... 657.4.5 Wczytywanie przesunięcia ......................................................................................... 657.4.6 Sprawdzanie kalibracji z obciążeniem z przesunięciem. ........................................... 667.4.7 Kalibracja przy pomocy czujnika zegarowego ........................................................... 677.4.8 Zapisywanie kalibracji ................................................................................................ 687.4.9 Ręczna dekalibracja osi ............................................................................................. 697.5 Pomiar narzędzia ............................................................................................................ 697.5.1 Pomiar TCP: Metoda 4-punktowa XYZ ...................................................................... 707.5.2 Pomiar TCP: Metoda referencyjny XYZ .................................................................... 717.5.3 Określanie orientacji: Metoda ABC World ................................................................. 727.5.4 Określanie orientacji: Metoda 2-punktowa ABC ........................................................ 737.5.5 Wprowadzanie danych numerycznych ...................................................................... 757.6 Pomiar podstawy ............................................................................................................ 757.6.1 Metoda 3-punktowa .................................................................................................. 767.6.2 Metoda pośrednia ...................................................................................................... 777.6.3 Wprowadzanie danych numerycznych ...................................................................... 777.7 Pomiar zewnętrznego TCP oraz narzędzia stacjonarnego ............................................. 787.7.1 Mierzenie zewnętrznego TCP .................................................................................... 787.7.2 Numeryczne wprowadzanie zewnętrznego TCP ....................................................... 807.7.3 Pomiar elementu obrabianego: Metoda bezpośrednia .............................................. 807.7.4 Pomiar elementu obrabianego: Metoda pośrednia .................................................... 817.8 Zmiana nazwy narzędzia/podstawy ................................................................................ 827.9 Dane obciążenia ............................................................................................................. 837.9.1 Obciążenia robota ...................................................................................................... 837.9.2 Ustalanie danych obciążenia ..................................................................................... 837.9.3 Sprawdzanie danych obciążenia ............................................................................... 847.9.4 Wprowadzanie danych obciążenia ............................................................................ 857.9.5 Wprowadzanie danych dodatkowego obciążenia ...................................................... 85
8 Programowanie i edycja programów ............................................................. 87
8.1 Menedżer plików Nawigator ............................................................................................ 878.1.1 Wybór filtra ................................................................................................................. 888.1.2 Wyświetlanie właściwości .......................................................................................... 898.1.3 Symbole w Nawigatorze ............................................................................................ 898.2 Wybór i wycofywanie wyboru programu ......................................................................... 908.3 Przełączanie między Nawigatorem a programem .......................................................... 908.4 Struktura programu KRL ................................................................................................. 908.5 Pozycja HOME ............................................................................................................... 918.6 Symbole w programie ..................................................................................................... 918.7 Bufor przebiegu .............................................................................................................. 928.8 Uruchamianie programu ................................................................................................. 938.8.1 Tryby wykonywania programu ................................................................................... 938.8.2 Ustawianie override programu (POV) ....................................................................... 938.8.3 Uruchomienie programu do przodu (ręcznie) ............................................................ 94
5 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
8.8.4 Uruchamianie programu do przodu (tryb automatyczny) ........................................... 948.8.5 Uruchamianie programu do tyłu ................................................................................. 958.8.6 Zresetuj programu ..................................................................................................... 958.8.7 Uruchamianie trybu pracy Automatyka zewnętrzna .................................................. 968.9 Programowanie ruchów .................................................................................................. 968.9.1 Rodzaje ruchu ............................................................................................................ 968.9.2 Programowanie ruchu PTP ........................................................................................ 988.9.3 Formularz dołączony - ruch PTP ............................................................................... 988.9.4 Programowanie ruchu LIN ......................................................................................... 998.9.5 Formularz dołączony - ruch LIN ................................................................................. 1008.9.6 Programowanie ruchu CIRC ...................................................................................... 1008.9.7 Formularz dołączony - ruch CIRC ............................................................................. 1018.9.8 Okno opcji ramki ........................................................................................................ 1018.9.9 Okno opcji - parametry ruchu (ruch PTP) .................................................................. 1028.9.10 Okno opcji - parametry ruchu (ruch CP) .................................................................... 1038.9.11 Zmiana parametrów ruchu ......................................................................................... 1048.9.12 Zmiana wczytanego punktu ....................................................................................... 1048.9.13 Przybliżenie ............................................................................................................... 1058.9.14 Prowadzenie orientacji ............................................................................................... 1068.10 Programowanie instrukcji logicznych .............................................................................. 1078.10.1 Wejścia/wyjścia .......................................................................................................... 1078.10.2 Ustawianie wyjścia cyfrowego - OUT ........................................................................ 1088.10.3 Formularz OUT .......................................................................................................... 1088.10.4 Ustawianie wyjścia impulsowego - PULSE ................................................................ 1088.10.5 Formularz PULSE ...................................................................................................... 1088.10.6 Ustawianie analogowego wyjścia - ANOUT .............................................................. 1098.10.7 Formularz dołączony ANOUT statyczny .................................................................... 1098.10.8 Formularz ANOUT dynamiczny ................................................................................. 1108.10.9 Programowanie czasu oczekiwania - WAIT .............................................................. 1108.10.10 Formularz WAIT ......................................................................................................... 1118.10.11 Programowanie funkcji oczekiwania zależnej od sygnału - WAITFOR ..................... 1118.10.12 Formularz WAITFOR ................................................................................................. 1118.10.13 Zmiana instrukcji logicznej ......................................................................................... 1128.11 Nazwy w formularzach .................................................................................................... 1128.12 Edycja programu ............................................................................................................. 1138.12.1 Wprowadzanie komentarza lub Stempla ................................................................... 1138.12.2 Usuwanie wierszy programu ...................................................................................... 1138.13 Drukowanie programu .................................................................................................... 114
9 Komunikaty ...................................................................................................... 115
10 Serwis KUKA .................................................................................................... 117
10.1 Pomoc techniczna .......................................................................................................... 11710.2 Biuro obsługi klienta KUKA ............................................................................................. 117
Index .................................................................................................................. 123
6 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
1. Wstęp
1 Wstęp
1.1 Użytkownik dokumentacji
Niniejsza dokumentacja przeznaczona jest dla użytkowników posiadających następujące kwalifikacje:
podstawowa znajomość systemu robota
1.2 Dokumentacja systemu robota
W skład dokumentacji systemu robota wchodzi:
instrukcja obsługi robotainstrukcja obsługi układu sterowania robotainstrukcja obsługi i programowania dotycząca Systemu Oprogramowania KUKA (KUKA System Software)instrukcje dotyczące opcji i wyposażenia dodatkowego
Każda instrukcja stanowi oddzielny dokument.
1.3 Symbole wskazówek
Bezpieczeństwo Wskazówki, które są oznaczone tym symbolem, służą bezpieczeństwu pracy i należy ich przestrzegać.
Wskazówka Wskazówki, które są oznaczone tym symbolem, służą ułatwieniu pracy lub zawierają odnośniki do dalszych informacji.
1.4 Znaki towarowe
Windows jest znakiem towarowym Microsoft Corporation.
Mając na uwadze optymalne wykorzystanie naszych produktów zachęcamy naszych klientów do udziału w szkoleniu w KUKA College. Informacje odnośnie programu szkolenia są dostępne na stronie www.kuka.com lub bezpośrednio w naszych filiach.
Niebezpieczeństwo!Niniejsza wskazówka ostrzega przed ryzykiem utraty życia, odniesienia ciężkich obrażeń lub powstania dużych strat materialnych, jeżeli nie zostaną podjęte czynności zapobiegawcze.
Ostrzeżenie!Niniejsza wskazówka ostrzega przed możliwością utraty życia, odniesienia ciężkich obrażeń lub powstania dużych strat materialnych, jeżeli nie zostaną podjęte czynności zapobiegawcze.
Uwaga!Niniejsza wskazówka ostrzega przed możliwością odniesienia lekkich obrażeń lub powstania niewielkich strat materialnych, jeżeli nie zostaną podjęte czynności zapobiegawcze.
Wskazówka dotycząca ułatwienia pracy lub odnośniki do dalszych informacji.
7 / 12820.07.2006 KSS-AD-EA-5x pl

Instrukcja obsługi i programowania
8 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
2. Opis produktu
2 Opis produktu
2.1 Przegląd systemu robota
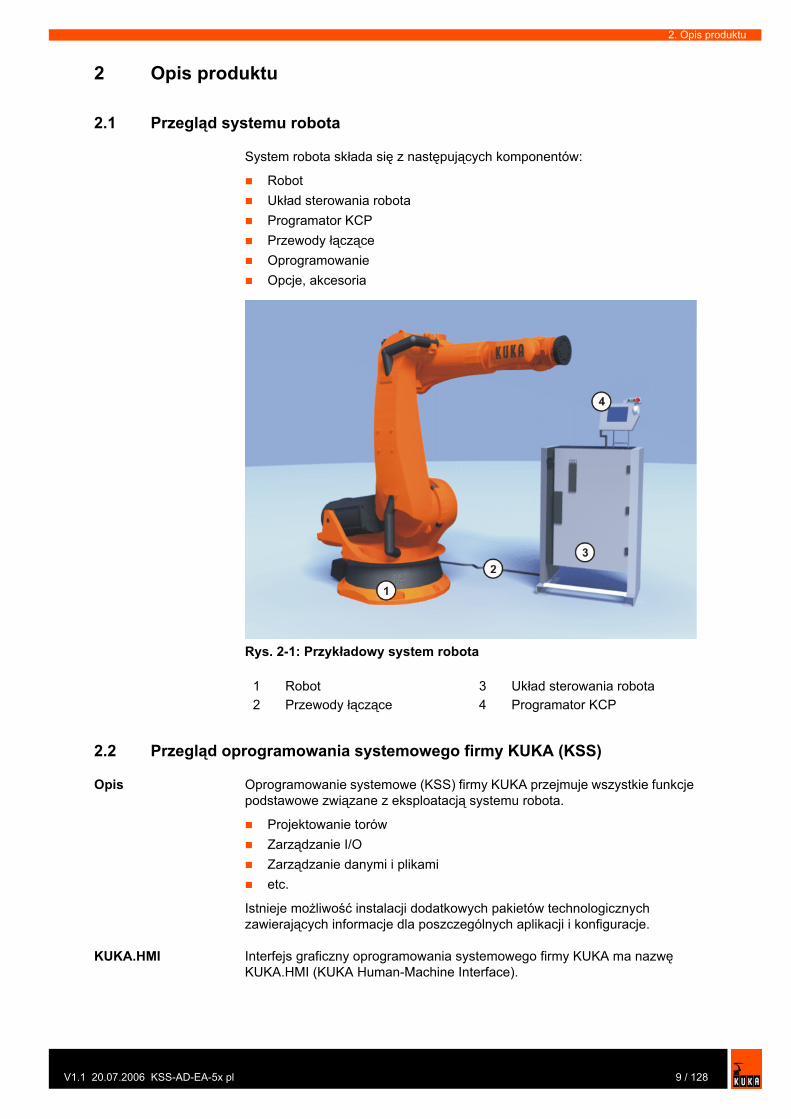
System robota składa się z następujących komponentów:
RobotUkład sterowania robotaProgramator KCPPrzewody łącząceOprogramowanieOpcje, akcesoria
2.2 Przegląd oprogramowania systemowego firmy KUKA (KSS)
Opis Oprogramowanie systemowe (KSS) firmy KUKA przejmuje wszystkie funkcje podstawowe związane z eksploatacją systemu robota.
Projektowanie torówZarządzanie I/OZarządzanie danymi i plikamietc.
Istnieje możliwość instalacji dodatkowych pakietów technologicznych zawierających informacje dla poszczególnych aplikacji i konfiguracje.
KUKA.HMI Interfejs graficzny oprogramowania systemowego firmy KUKA ma nazwę KUKA.HMI (KUKA Human-Machine Interface).
Rys. 2-1: Przykładowy system robota
1 Robot 3 Układ sterowania robota2 Przewody łączące 4 Programator KCP
9 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
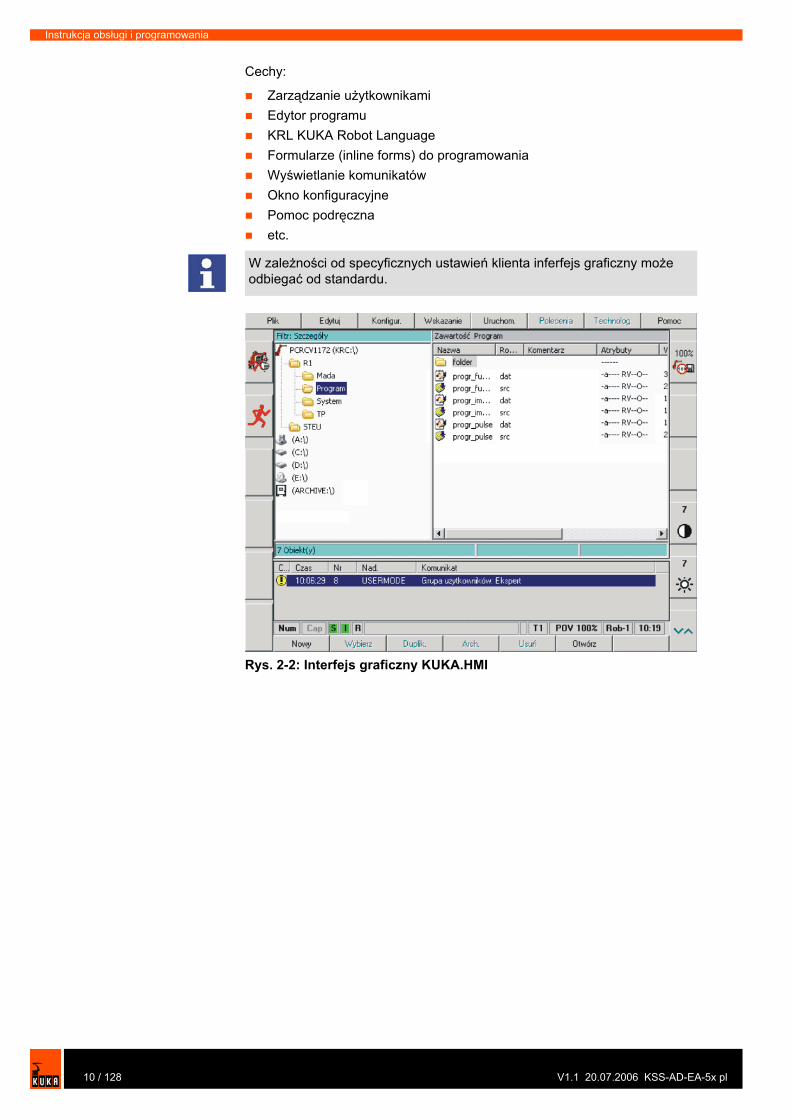
Cechy:
Zarządzanie użytkownikamiEdytor programuKRL KUKA Robot LanguageFormularze (inline forms) do programowaniaWyświetlanie komunikatówOkno konfiguracyjnePomoc podręcznaetc.
W zależności od specyficznych ustawień klienta inferfejs graficzny może odbiegać od standardu.
Rys. 2-2: Interfejs graficzny KUKA.HMI
10 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
3. Bezpieczeństwo
3 Bezpieczeństwo
3.1 Reakcje powodujące zatrzymanie systemu
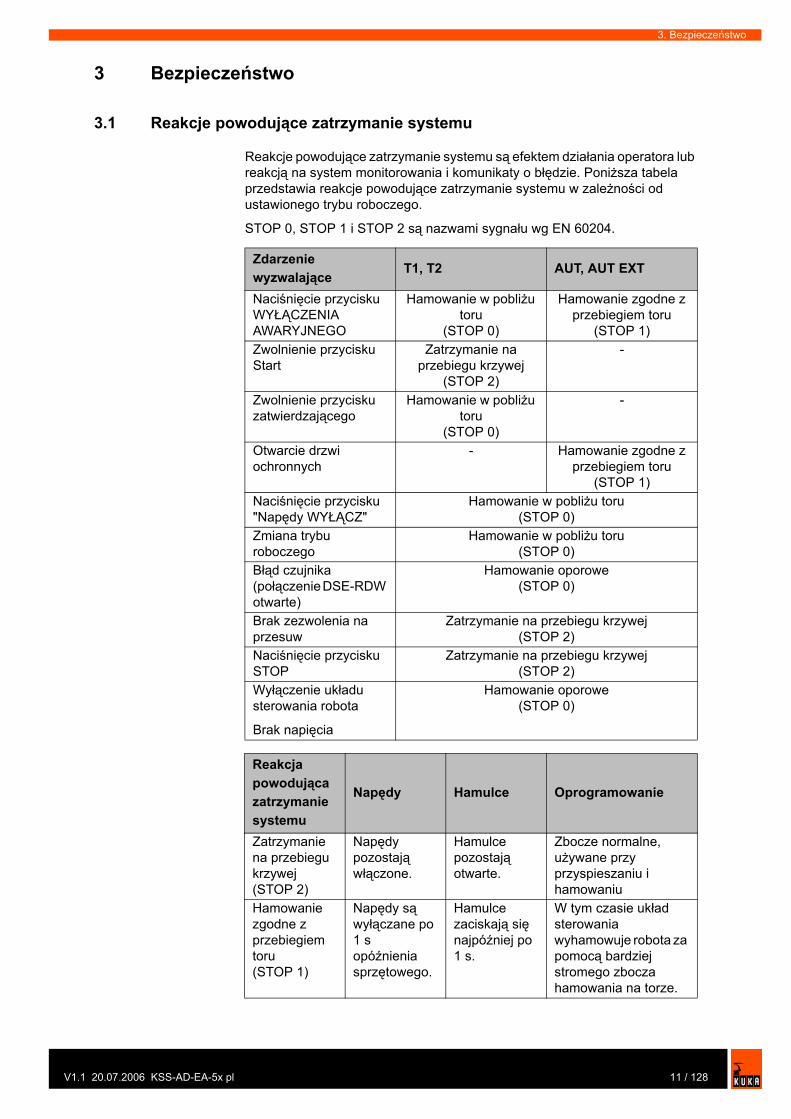
Reakcje powodujące zatrzymanie systemu są efektem działania operatora lub reakcją na system monitorowania i komunikaty o błędzie. Poniższa tabela przedstawia reakcje powodujące zatrzymanie systemu w zależności od ustawionego trybu roboczego.
STOP 0, STOP 1 i STOP 2 są nazwami sygnału wg EN 60204.
Zdarzenie wyzwalające
T1, T2 AUT, AUT EXT
Naciśnięcie przycisku WYŁĄCZENIA AWARYJNEGO
Hamowanie w pobliżu toru
(STOP 0)
Hamowanie zgodne z przebiegiem toru
(STOP 1)Zwolnienie przycisku Start
Zatrzymanie na przebiegu krzywej
(STOP 2)
-
Zwolnienie przycisku zatwierdzającego
Hamowanie w pobliżu toru
(STOP 0)
-
Otwarcie drzwi ochronnych
- Hamowanie zgodne z przebiegiem toru
(STOP 1)Naciśnięcie przycisku "Napędy WYŁĄCZ"
Hamowanie w pobliżu toru(STOP 0)
Zmiana trybu roboczego
Hamowanie w pobliżu toru(STOP 0)
Błąd czujnika (połączenie DSE-RDW otwarte)
Hamowanie oporowe(STOP 0)
Brak zezwolenia na przesuw
Zatrzymanie na przebiegu krzywej(STOP 2)
Naciśnięcie przycisku STOP
Zatrzymanie na przebiegu krzywej(STOP 2)
Wyłączenie układu sterowania robota
Brak napięcia
Hamowanie oporowe(STOP 0)
Reakcja powodująca zatrzymanie systemu
Napędy Hamulce Oprogramowanie
Zatrzymanie na przebiegu krzywej(STOP 2)
Napędy pozostają włączone.
Hamulce pozostają otwarte.
Zbocze normalne, używane przy przyspieszaniu i hamowaniu
Hamowanie zgodne z przebiegiem toru(STOP 1)
Napędy są wyłączane po 1 s opóźnienia sprzętowego.
Hamulce zaciskają się najpóźniej po 1 s.
W tym czasie układ sterowania wyhamowuje robota za pomocą bardziej stromego zbocza hamowania na torze.
11 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
3.2 Oznaczenia systemu robota
Zabronione jest usuwanie, zaklejanie, zamalowywanie lub innego rodzaju uniemożliwienie odczytu
tabliczek znamionowych,wskazówek ostrzegawczych,symboli bezpieczeństwa,tabliczek informacyjnych orazoznaczeń przewodów
systemu robota.
3.3 Informacja dot. bezpieczeństwa
Dane dot. bezpieczeństwa nie mogą być wykorzystywane przeciwko firmie KUKA Roboter GmbH. Nawet ścisłe przestrzeganie wskazówek bezpieczeństwa nie daje gwarancji, że system robota nie spowoduje powstania obrażeń lub szkód materialnych.
Bez zezwolenia firmy KUKA Roboter GmbH nie wolno dokonywać żadnych modyfikacji systemu robota. Do systemu robota nie wolno podłączać żadnych dodatkowych komponentów (narzędzi, oprogramowania etc.), nie należących do zakresu dostawy firmy KUKA Roboter GmbH. Za uszkodzenia systemu robota, powstałe wskutek instalacji tych komponentów, odpowiedzialność ponosi wyłącznie użytkownik.
3.4 Planowanie instalacji
3.4.1 Deklaracja zgodności z normami WE i deklaracja producenta
Deklaracja zgodności z normami WE
Integrator systemów musi zgodnie z dyrektywą 98/37/WE (dyrektywa "Maszyny") wystawić dla całej instalacji Deklarację zgodności z normami WE. Deklaracja zgodności stanowi podstawę oznaczenia instalacji znakiem jakości CE. System robota może być eksploatowany wyłącznie zgodnie z ustawami, przepisami i normami, obowiązującymi w kraju przeznaczenia.
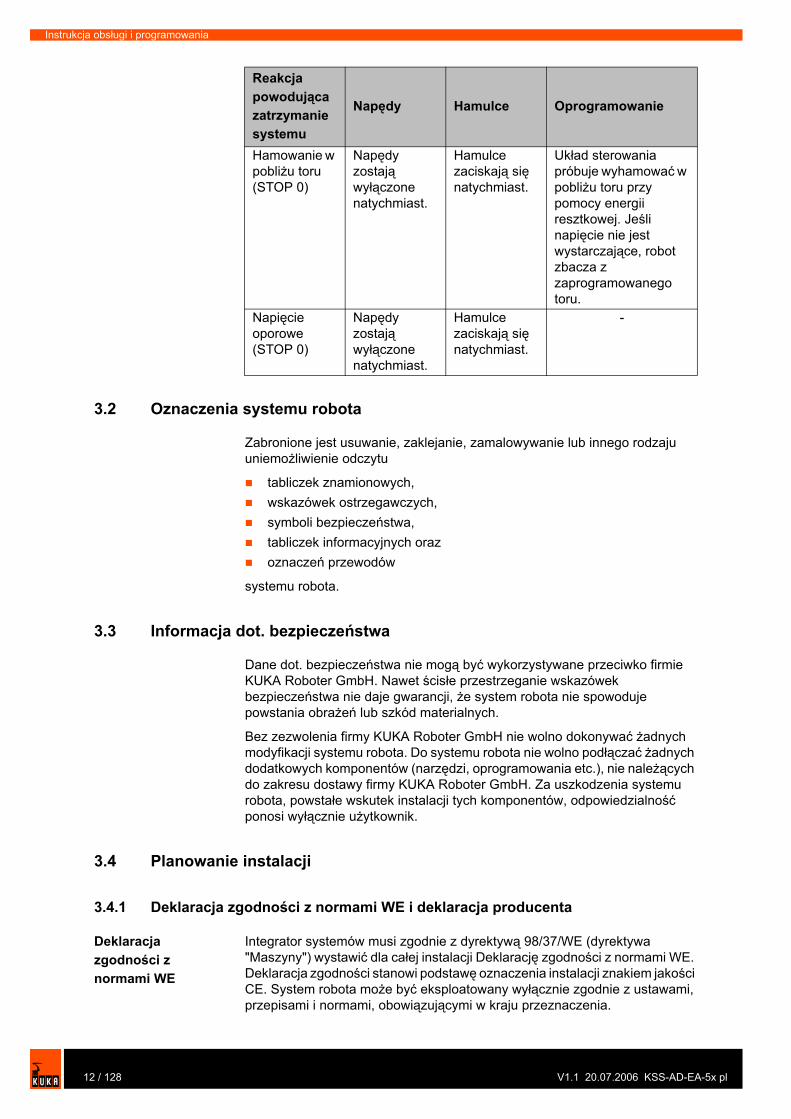
Hamowanie w pobliżu toru(STOP 0)
Napędy zostają wyłączone natychmiast.
Hamulce zaciskają się natychmiast.
Układ sterowania próbuje wyhamować w pobliżu toru przy pomocy energii resztkowej. Jeśli napięcie nie jest wystarczające, robot zbacza z zaprogramowanego toru.
Napięcie oporowe(STOP 0)
Napędy zostają wyłączone natychmiast.
Hamulce zaciskają się natychmiast.
-
Reakcja powodująca zatrzymanie systemu
Napędy Hamulce Oprogramowanie
12 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
3. Bezpieczeństwo
Układ sterowania robota posiada certyfikat CE zgodnie z dyrektywą 89/336/EWG (dyrektywa "Kompatybilność elektromagnetyczna") oraz dyrektywą 73/23/EWG (dyrektywa "Niskie napięcia")
Deklaracja producenta
Wraz z systemem robota dostarczana jest deklaracja producenta. Deklaracja producenta zawiera klauzulę mówiącą, że uruchomienie systemu robota jest niedozwolone do momentu, aż system ten będzie odpowiadał postanowieniom dyrektywy 98/37/WE (dyrektywa "Maszyny").
3.4.2 Miejsce ustawienia
Robot Rozplanowując instalację należy zapewnić, że miejsce ustawienia (podłoże, ściana, strop) będzie posiadało wymaganą klasę jakości betonu oraz nośność. W specyfikacjach podano obciążenia główne fundamentu dla każdego wariantu robota.
Układ sterowania robota
Należy zachować minimalne odstępy układu sterowania robota od ścian, szaf i innych komponentów instalacji.
3.4.3 Symulacja
Programy symulacyjne nie odpowiadają ściśle warunkom rzeczywistym. Programy robota, stworzone w programach symulacyjnych, należy przetestować w urządzeniu w trybie T1. W razie potrzeby należy opracować program na nowo.
3.4.4 Strefa robocza, strefa bezpieczeństwa i strefa zagrożenia
Strefy robocze muszą być ograniczone do wymaganego minimum. Strefę roboczą należy zabezpieczyć za pomocą urządzeń zabezpieczających.
Strefa zagrożenia obejmuje strefę roboczą i tory hamowania robota. Należy je odgrodzić za pomocą zabezpieczeń, aby wykluczyć zagrożenia osób i przedmiotów.
Dalsze informacje znajdują się w instrukcji obsługi robota.
Dalsze informacje znajdują się w instrukcji obsługi układu sterowania robota.
13 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
3.4.5 Zewnętrzne urządzenia zabezpieczające
WYŁĄCZENIE AWARYJNE
Do złącza X11 można podłączyć dodatkowe urządzenia WYŁĄCZENIA AWARYJNEGO lub sprzężyć je ze sobą za pośrednictwem nadrzędnych układów sterowania (np. SPS).
W przypadku WYŁĄCZENIA AWARYJENGO sygnały wejścia/ wyjścia jak również konieczne układy zasilania zewnętrznego muszą gwarantować stabilny stan.
Ogrodzenia ochronne
Wymagania dot. ogrodzeń ochronnych:
Ogrodzenia ochronne muszą wytrzymać obciążenia związane z przewidywanymi siłami roboczymi i warunkami otoczenia.Ogrodzenia ochronne nie mogą same stwarzać zagrożenia.Należy zachować minimalne odstępy od strefy zagrożenia.
Drzwi ochronne Wymagania dot. drzwi ochronnych:
Ilość drzwi w ogrodzeniu ochronnym musi być ograniczona do minimum.Wszystkie drzwi ochronne należy zabezpieczyć za pomocą ochrony operatora (złącze 11).
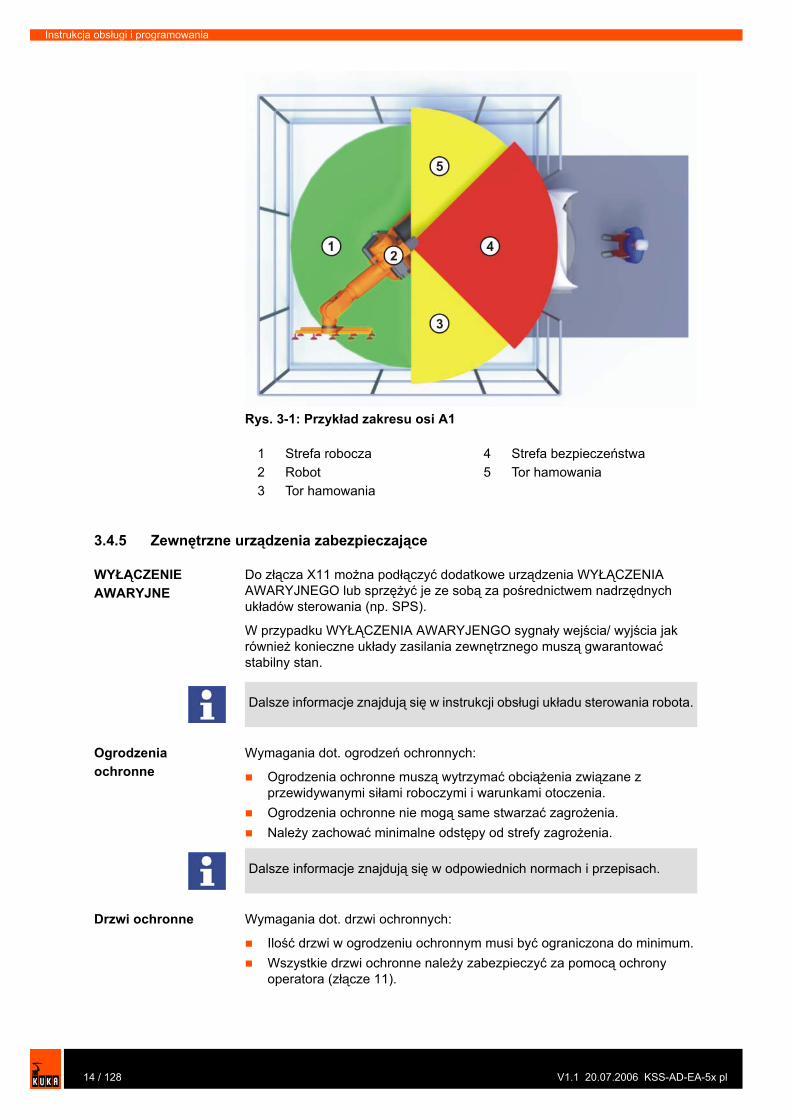
Rys. 3-1: Przykład zakresu osi A1
1 Strefa robocza 4 Strefa bezpieczeństwa2 Robot 5 Tor hamowania3 Tor hamowania
Dalsze informacje znajdują się w instrukcji obsługi układu sterowania robota.
Dalsze informacje znajdują się w odpowiednich normach i przepisach.
14 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
3. Bezpieczeństwo
Należy uniemożliwić włączenie trybu automatycznego do momentu, aż wszystkie drzwi ochronne zostaną zamknięte.W trybie automatycznym drzwi ochronne mogą zostać mechanicznie zablokowane przez urządzenie zabezpieczające.Jeżeli w trybie automatycznym drzwi ochronne zostaną otwarte, musi zadziałać funkcja WYŁĄCZENIA AWARYJNEGO.Gdy drzwi ochronne zostaną zamknięte, nie można natychmiast uruchomić automatycznego trybu pracy robota. Konieczne jest potwierdzenie komunikatu na pulpicie obsługowym.
Inne urządzenia zabezpieczające
Inne urządzenia zabezpieczające należy włączyć do instalacji zgodnie z odpowiednimi normami i przepisami.
3.5 Zabezpieczenia systemu robota
3.5.1 Przegląd urządzeń zabezpieczających
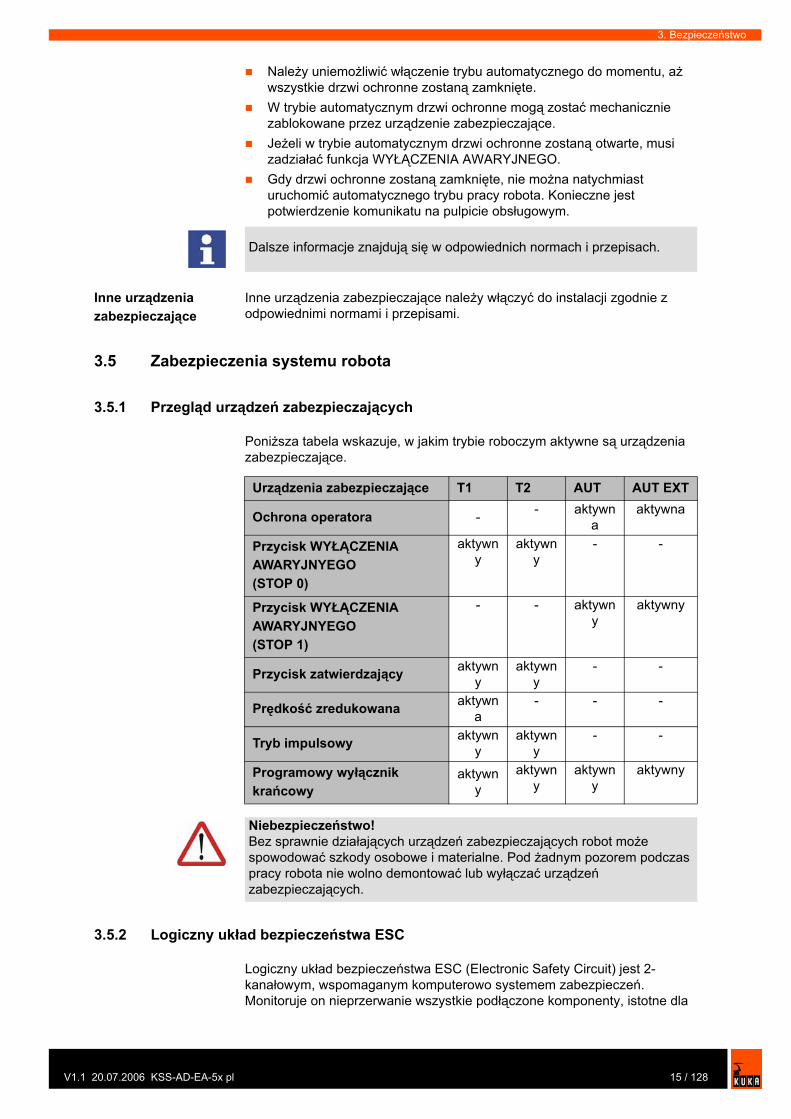
Poniższa tabela wskazuje, w jakim trybie roboczym aktywne są urządzenia zabezpieczające.
3.5.2 Logiczny układ bezpieczeństwa ESC
Logiczny układ bezpieczeństwa ESC (Electronic Safety Circuit) jest 2-kanałowym, wspomaganym komputerowo systemem zabezpieczeń. Monitoruje on nieprzerwanie wszystkie podłączone komponenty, istotne dla
Dalsze informacje znajdują się w odpowiednich normach i przepisach.
Urządzenia zabezpieczające T1 T2 AUT AUT EXT
Ochrona operatora - - aktywna
aktywna
Przycisk WYŁĄCZENIA AWARYJNYEGO(STOP 0)
aktywny
aktywny
- -
Przycisk WYŁĄCZENIA AWARYJNYEGO(STOP 1)
- - aktywny
aktywny
Przycisk zatwierdzający aktywny
aktywny
- -
Prędkość zredukowana aktywna
- - -
Tryb impulsowy aktywny
aktywny
- -
Programowy wyłącznik krańcowy
aktywny
aktywny
aktywny
aktywny
Niebezpieczeństwo!Bez sprawnie działających urządzeń zabezpieczających robot może spowodować szkody osobowe i materialne. Pod żadnym pozorem podczas pracy robota nie wolno demontować lub wyłączać urządzeń zabezpieczających.
15 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
bezpieczeństwa. W przypadku usterek lub przerwania obwodu bezpieczeństwa, układ zasilania napięciem wyłącza napędy i tym samym powoduje zatrzymanie robota.
Logiczny układ bezpieczeństwa ESC monitoruje następujące wejścia:
Lokalne WYŁĄCZENIE AWARYJNEZewnętrzne WYŁĄCZENIE AWARYJNEOchrona operatoraPrzycisk zatwierdzającyNapędy WYŁ.Napędy WŁ.Tryby roboczeWejścia kwalifikujące
3.5.3 Wejście do ochrony operatora
Wejście do ochrony operatora służy do blokady oddzielających urządzeń zabezpieczających. Do 2-kanałowego wejścia można podłączać urządzenia zabezpieczające, takie jak np. drzwi ochronne. Jeżeli do tego wejścia nie podłączono żadnych urządzeń, nie ma możliwości eksploatacji robota w trybie automatycznym. Podczas pracy w trybach testowych T1 i T2 ochrona operatora jest nieaktywna.
W przypadku utraty sygnału podczas pracy w trybie automatycznym (np. po otwarciu drzwi ochronnych) po upływie 1 sek. następuje wyłączenie napędów i robot ulega zatrzymaniu przy pomocy funkcji STOP 1. Przy ponownym pojawieniu się sygnału na wejściu (po zamknięciu drzwi ochronnych i potwierdzeniu sygnału) można kontynuować pracę w trybie automatycznym.
Ochronę operatora można podłączyć do złącza X11.
3.5.4 Podłączenie zewnętrznego przycisku zatwierdzającego
Zewnętrzny przycisk zatwierdzający jest potrzebny, gdy w strefie zagrożenia robota przebywa więcej osób.
Zewnętrzny przycisk zatwierdzający można podłączyć do złącza X11.
Zewnętrzny przycisk zatwierdzający nie należy do zakresu dostawy firmy KUKA Roboter GmbH.
3.5.5 Przycisk WYŁĄCZENIA AWARYJNYEGO
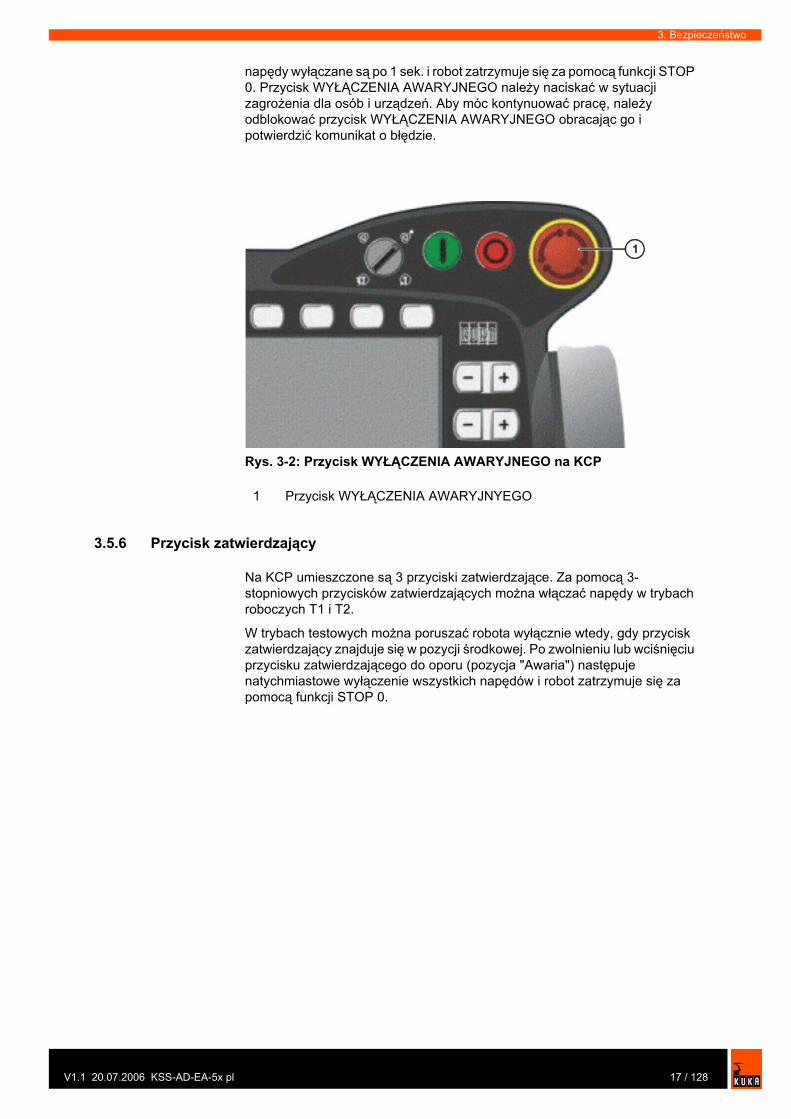
Przycisk WYŁĄCZENIA AWARYJNEGO systemu robota znajduje się na KCP. Po naciśnięciu przycisku WYŁĄCZENIA AWARYJNEGO następuje natychmiastowe wyłączenie napędów w trybie testowym T1 i T2 i robot zatrzymuje się za pomocą funkcji STOP 0. W trybach pracy automatycznej
Dalsze informacje znajdują się w instrukcji obsługi układu sterowania robota.
Dalsze informacje znajdują się w instrukcji obsługi układu sterowania robota.
Dalsze informacje znajdują się w instrukcji obsługi układu sterowania robota.
16 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
3. Bezpieczeństwo
napędy wyłączane są po 1 sek. i robot zatrzymuje się za pomocą funkcji STOP 0. Przycisk WYŁĄCZENIA AWARYJNEGO należy naciskać w sytuacji zagrożenia dla osób i urządzeń. Aby móc kontynuować pracę, należy odblokować przycisk WYŁĄCZENIA AWARYJNEGO obracając go i potwierdzić komunikat o błędzie.
3.5.6 Przycisk zatwierdzający
Na KCP umieszczone są 3 przyciski zatwierdzające. Za pomocą 3-stopniowych przycisków zatwierdzających można włączać napędy w trybach roboczych T1 i T2.
W trybach testowych można poruszać robota wyłącznie wtedy, gdy przycisk zatwierdzający znajduje się w pozycji środkowej. Po zwolnieniu lub wciśnięciu przycisku zatwierdzającego do oporu (pozycja "Awaria") następuje natychmiastowe wyłączenie wszystkich napędów i robot zatrzymuje się za pomocą funkcji STOP 0.
Rys. 3-2: Przycisk WYŁĄCZENIA AWARYJNEGO na KCP
1 Przycisk WYŁĄCZENIA AWARYJNYEGO
17 / 12820.07.2006 KSS-AD-EA-5x pl

Instrukcja obsługi i programowania
3.5.7 Przełącznik trybów roboczych
Tryb roboczy wybierany jest przy pomocy przełącznika trybów roboczych, znajdującego się na KCP. Przełącznik uruchamiany jest kluczem, który można wyjąć. Jeśli klucz zostanie wyjęty, przełącznik jest zablokowany a tryb roboczy nie może zostać zmieniony.
Jeśli tryb roboczy zmieniany jest podczas pracy urządzenia, napędy zostają natychmiast wyłączone i robot zatrzymuje się przy pomocy STOP 0.
Rys. 3-3: Przycisk zatwierdzający na KCP
1 - 3 Przycisk zatwierdzający
Rys. 3-4: Przełącznik trybów roboczych
18 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
3. Bezpieczeństwo
3.5.8 Tryb impulsowy
W trybach testowych T1 i T2 robot może być przesuwany wyłącznie w trybie impulsowym. W tym celu należy nacisnąć i przytrzymać przycisk zatwierdzający i przycisk Start. Po zwolnieniu lub wciśnięciu przycisku zatwierdzającego do oporu (pozycja "Awaria") następuje natychmiastowe wyłączenie wszystkich napędów i robot zatrzymuje się przy pomocy funkcji STOP 0. Zwolnienie przycisku Start powoduje zatrzymanie robota przy pomocy funkcji STOP 2.
3.5.9 Mechaniczne ograniczniki krańcowe
Zakresy osi podstawowych A1 do A3 i osi chwytaka A5 są ograniczone mechanicznymi ogranicznikami krańcowymi z buforem.
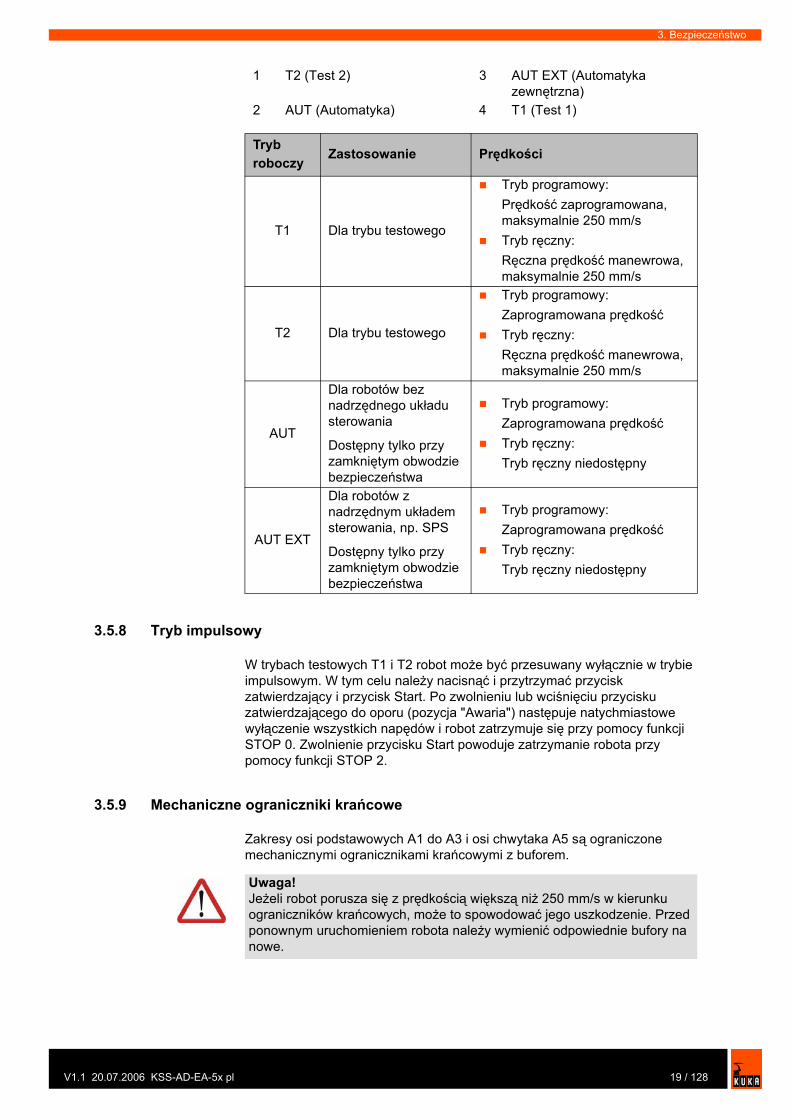
1 T2 (Test 2) 3 AUT EXT (Automatyka zewnętrzna)
2 AUT (Automatyka) 4 T1 (Test 1)
Tryb roboczy
Zastosowanie Prędkości
T1 Dla trybu testowego
Tryb programowy:Prędkość zaprogramowana, maksymalnie 250 mm/sTryb ręczny:Ręczna prędkość manewrowa, maksymalnie 250 mm/s
T2 Dla trybu testowego
Tryb programowy:Zaprogramowana prędkośćTryb ręczny:Ręczna prędkość manewrowa, maksymalnie 250 mm/s
AUT
Dla robotów bez nadrzędnego układu sterowania
Dostępny tylko przy zamkniętym obwodzie bezpieczeństwa
Tryb programowy:Zaprogramowana prędkośćTryb ręczny:Tryb ręczny niedostępny
AUT EXT
Dla robotów z nadrzędnym układem sterowania, np. SPS
Dostępny tylko przy zamkniętym obwodzie bezpieczeństwa
Tryb programowy:Zaprogramowana prędkośćTryb ręczny:Tryb ręczny niedostępny
Uwaga!Jeżeli robot porusza się z prędkością większą niż 250 mm/s w kierunku ograniczników krańcowych, może to spowodować jego uszkodzenie. Przed ponownym uruchomieniem robota należy wymienić odpowiednie bufory na nowe.
19 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
3.5.10 Programowy wyłącznik krańcowy
Zakresy wszystkich osi robota są ograniczone regulowanymi programowymi wyłącznikami krańcowymi. Programowe wyłączniki krańcowe służą wyłącznie do ochrony maszyny i należy je ustawić w taki sposób, aby robot nie mógł się przesuwać w kierunku mechanicznych ograniczników krańcowych.
3.5.11 Układ monitorowania zakresu osi (opcja)
Osie podstawowe A1 do A3 większości robotów mogą być wyposażone w 2-kanałowe układy monitorowania zakresu osi. Za pomocą tego układu można regulować i monitorować strefę bezpieczeństwa jednej osi. Zwiększa to ochronę osób i urządzeń.
3.5.12 Mechaniczny ogranicznik zakresu osi (opcja)
Osie podstawowe A1 do A3 większości robotów mogą być wyposażone w mechaniczne ograniczniki zakresu. Regulowane ograniczniki zakresu osi ograniczają zakres osi do niezbędnego minimum. Zwiększa to ochronę osób i urządzeń.
3.5.13 Mechanizm swobodnego obrotu (opcja)
Opis Za pomocą mechanizmu swobodnego obrotu można mechanicznie poruszać robota, unieruchomionego wskutek wypadku lub awarii. Mechanizm swobodnego obrotu może być stosowany dla potrzeb silników napędowych osi podstawowych i w zależności od wariantu robota dla potrzeb silników napędowych osi chwytaków. Mechanizm ten może być stosowany tylko w sytuacjach wyjątkowych i awaryjnych (np. w celu uwolnienia osób). Po użyciu mechanizmu swobodnego obrotu należy w razie potrzeby wymienić odpowiednie silniki.
Postępowanie 1. Wyłączyć układ sterowania robota i zabezpieczyć przed niepowołanym ponownym włączeniem (np. za pomocą kłódki).
2. Zdjąć osłonę silnika.
Dalsze informacje znajdują się w instrukcji obsługi i programowania.
Opcja posiada dodatkowe wyposażenie.
Dalsze informacje znajdują się w instrukcji obsługi układu monitorowania strefy roboczej.
Opcja posiada dodatkowe wyposażenie.
Dalsze informacje znajdują się w instrukcji obsługi ogranicznika strefy roboczej.
Uwaga!Podczas pracy silniki nagrzewają się do temperatur, które mogą powodować oparzenia skóry. Należy zastosować odpowiednie środki zabezpieczające.
20 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
3. Bezpieczeństwo
3. Nałożyć mechanizm na odpowiedni silnik i przesunąć oś w żądanym kierunku. Kierunki oznaczone są na silnikach za pomocą strzałek. Należy przy tym pokonać opór mechanicznego hamulca silnika i ewentualnie dodatkowe obciążenia osi.
4. Założyć osłonę na silnik.5. Ponownie wyregulować wszystkie osie robota.
3.5.14 KUKA.SafeRobot (opcja)
KUKA.SafeRobot jest opcją, składającą się z komponentów w postaci programów i sprzętu, która umożliwia zastąpienie zwykłego układu monitorowania obszaru osi.
Właściwości Do 10 monitorowanych i dowolnie zdefiniowanych obszarówMożliwość kombinacji obszarówSkrócone czasy reakcji i tory hamowaniaBezpieczne wejścia i wyjścia w ilości nadmiarowejBezpieczna, zredukowana i dostosowana do osi prędkość i przyspieszenieBezpieczna, zredukowana prędkość kartezjańska przy kołnierzu montażowymBezpieczne zatrzymanie roboczeBezpieczne zatrzymanie wskutek reakcji systemu zabezpieczeń Electronic Safety Circuit wraz z bezpiecznym wyłączeniem napędów
Sposób działania Robot porusza się wewnątrz stale monitorowanych i aktywnych stref roboczych (strefy robocze 1...7). Pozycja rzeczywista jest stale monitorowana i porównywana z aktywnymi strefami roboczymi.
Opcja SafeRDW pozwala na monitoring robota na podstawie wartości dostarczonych z enkoderów. Wartości te są przekazywane w ilości nadmiarowej do SafeRDW i porównywane z ustawionymi parametrami, gwarantującymi bezpieczeństwo pracy. Jeżeli robot przekroczy granicę osi lub naruszy jakiś parametr, wtedy ulega zatrzymaniu, hamując przy pomocy funkcji STOP 0. Po zakończeniu hamowania pozostaje w stanie bezruchu.
Bezpieczne wejścia SafeRDW są również wykonane w ilości nadmiarowej i ustawione na LOW, aby rozpoznać przerwę w przewodzie.
3.6 Personal
Użytkownik Użytkownik systemu robota jest odpowiedzialny za jego pracę. Musi zadbać o to, aby eksploatacja przebiegała bez zakłóceń, zgodnie z wymogami bezpieczeństwa, oraz określić środki bezpieczeństwa dotyczące personelu.
Integrator systemów Integrator systemów podłącza system robota do instalacji zgodnie z wymogami bezpieczeństwa.
Integrator systemów jest odpowiedzialny za następujące zadania:
Opcja nie posiada dodatkowego wyposażenia.
Dalsze informacje znajdują się w dokumentacji KUKA System Technology KUKA.SafeRobot.
21 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Ustawienie systemu robotaPrzyłączenie systemu robotaZastosowanie wymaganych urządzeń zabezpieczającychWystawienie Deklaracji zgodnościUmieszczenie znaku jakości CE
Użytkownik Użytkownik musi spełniać następujące warunki:
Użytkownik musi przeczytać i zrozumieć dokumentację systemu robota, a zwłaszcza rozdział dot. bezpieczeństwa.Użytkownik musi zostać przeszkolony w zakresie wykonywanych prac.Czynności związane z systemem robota może wykonywać wyłącznie wykwalifikowany personel. Są to osoby, które ze względu na posiadane specjalistyczne wykształcenie, umiejętności i doświadczenie, jak również na podstawie znajomości stosownych norm, potrafią właściwie ocenić prace przeznaczone do wykonania, oraz rozpoznać ewentualne zagrożenia.
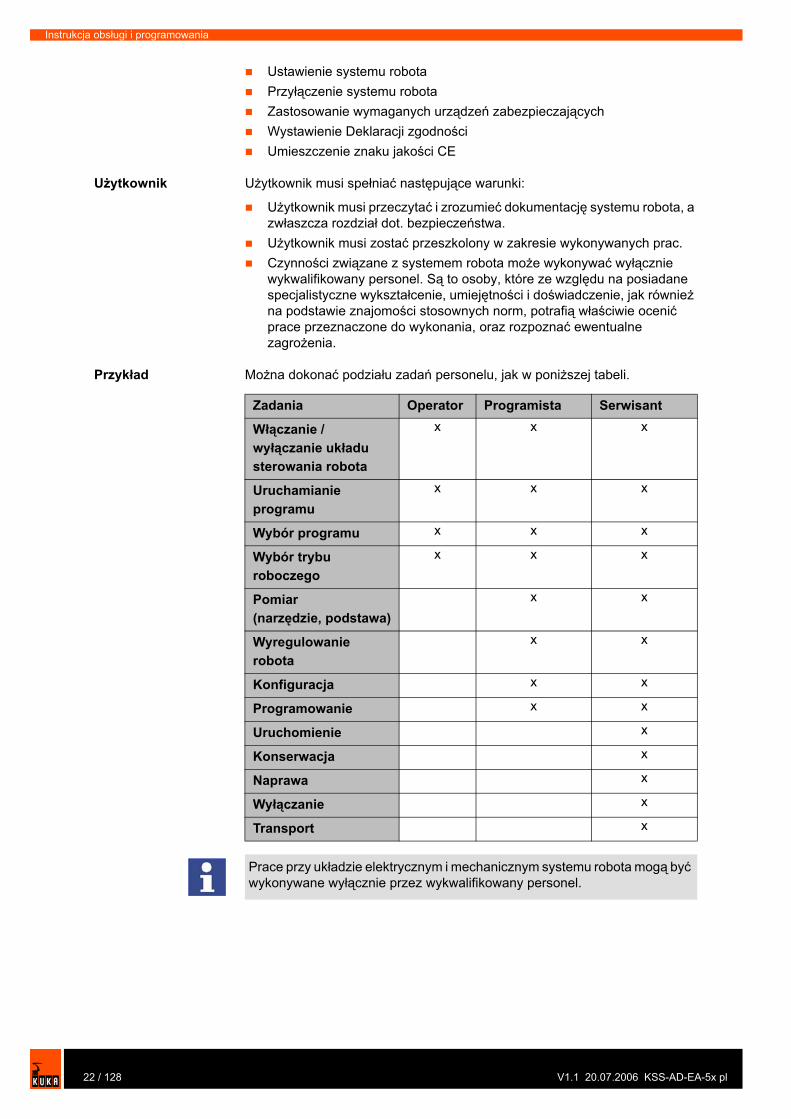
Przykład Można dokonać podziału zadań personelu, jak w poniższej tabeli.
Zadania Operator Programista Serwisant
Włączanie / wyłączanie układu sterowania robota
x x x
Uruchamianie programu
x x x
Wybór programu x x x
Wybór trybu roboczego
x x x
Pomiar(narzędzie, podstawa)
x x
Wyregulowanie robota
x x
Konfiguracja x x
Programowanie x x
Uruchomienie x
Konserwacja x
Naprawa x
Wyłączanie x
Transport x
Prace przy układzie elektrycznym i mechanicznym systemu robota mogą być wykonywane wyłącznie przez wykwalifikowany personel.
22 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
3. Bezpieczeństwo
3.7 Środki bezpieczeństwa
3.7.1 Ogólne środki bezpieczeństwa
System robota może być użytkowany wyłącznie w stanie sprawności technicznej, zgodnie z przeznaczeniem oraz z uwzględnieniem zasad bezpieczeństwa. Nieprawidłowa obsługa może prowadzić do powstania szkód osobowych i materialnych.
Nawet przy wyłączonym i zabezpieczonym układzie sterowania należy się liczyć z możliwością ruchów robota. Wskutek niewłaściwego montażu (np. przeciążenie) lub defektów mechanicznych (np. błędne hamowanie) robot może nierównomiernie osiadać na podłożu. W przypadku wykonywania prac przy wyłączonym robocie, należy go przedtem przesunąć w takie położenie, aby nie mógł się samodzielnie przesuwać, zarówno z jak i bez obciążenia. Jeżeli jest to niemożliwe, należy odpowiednio zabezpieczyć robota.
KCP KCP należy usunąć z urządzenia, jeżeli nie jest ono do niego podłączone, ponieważ przycisk WYŁĄCZENIA AWARYJNEGO jest w tym wypadku nieskuteczny.
Jeżeli do urządzenia podłączonych jest więcej paneli KCP, należy pamiętać o tym, aby ich nie pomylić.
Do układu sterowania robota nie wolno podłączać myszy i klawiatury.
Usterki W razie wystąpienia usterek w układzie sterowania robota, należy przeprowadzić następujące czynności:
Wyłączyć układ sterowania robota i zabezpieczyć przed niepowołanym ponownym włączeniem (np. za pomocą kłódki). Poinformować o usterce za pomocą tabliczki z odpowiednią wskazówką.Prowadzić zapisy dot. usterek.Usunąć usterkę i przeprowadzić kontrolę poprawności działania.
3.7.2 Transport
Robot Należy przestrzegać przepisowej pozycji transportowej robota. Transport musi się odbywać zgodnie ze wskazówkami, zawartymi w instrukcji obsługi robota.
Układ sterowania robota
Układ sterowania robota musi być transportowany i ustawiany w pozycji pionowej. Aby nie uszkodzić układu sterowania, podczas transportu należy unikać wstrząsów lub uderzeń.
3.7.3 Uruchamianie
Układ sterowania robota można uruchomić dopiero wtedy, gdy temperatura we wnętrzu szafy sterowniczej dostosuje się do temperatury otoczenia. W przeciwnym razie skropliny mogą doprowadzić do uszkodzeń w układzie elektrycznym.
Dalsze informacje znajdują się w instrukcji obsługi robota.
Dalsze informacje znajdują się w instrukcji obsługi układu sterowania robota.
23 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Kontrola poprawności działania
Podczas kontroli poprawności działania w strefie zagrożenia robota nie mogą znajdować się ludzie i przedmioty.
Podczas kontroli poprawności działania należy zapewnić, co następuje:
System robota musi być ustawiony i podłączony. Przy robocie lub w układzie sterowania nie ma żadnych ciał obcych oraz zniszczonych, obluzowanych lub pojedynczych elementów.Wszystkie urządzenia zabezpieczające i środki bezpieczeństwa są kompletne i sprawne technicznie.Wszystkie połączenia elektryczne są poprawne.Urządzenia peryferyjne zostały prawidłowo podłączone.Otoczenie zewnętrzne odpowiada dopuszczalnym wartościom, podanym w instrukcji eksploatacji.
Ustawienia Należy zapewnić, aby tabliczka znamionowa, umieszczona na układzie sterowania robota, posiadała takie same dane maszyny, jak znajdujące się w deklaracji producenta. Dane maszyny muszą zostać wpisane na tabliczkę znamionową robota podczas uruchamiania.
Jeśli załadowano nieprawidłowe dane maszyny, nie wolno uruchamiać robota. W przeciwnym razie może dojść do powstania szkód materialnych.
3.7.4 Ochrona antywirusowa i bezpieczeństwo sieci
Użytkownik systemu robota jest odpowiedzialny za to, aby oprogramowanie było zawsze zabezpieczone za pomocą aktualnej wersji ochrony antywirusowej. Jeżeli układ sterowania robota jest zintegrowany z siecią, ma połączenie z siecią firmy lub z Internetem, zaleca się zabezpieczenie sieci robota zewnętrzną blokadą firewall.
3.7.5 Programowanie
Środki bezpieczeństwa konieczne podczas programowania:
Podczas programowania w strefie zagrożenia robota nie powinny przebywać żadne osoby.Nowe lub zmodyfikowane programy należy zawsze najpierw przetestować w trybie roboczym T1.Jeżeli napędy nie są potrzebne, należy je wyłączyć, aby robot przypadkowo się nie przesunął.Podczas eksploatacji silniki nagrzewają się do temperatur, które mogą powodować oparzenia skóry. W miarę możliwości nie należy dotykać silników. W razie potrzeby stosować odpowiednie środki ochrony osobistej.
Dalsze informacje znajdują się w instrukcji obsługi robota oraz instrukcji obsługi układu sterowania robota.
Dalsze informacje znajdują się w instrukcji obsługi i programowania.
Dla potrzeb optymalnej eksploatacji naszych produktów zalecamy naszym klientom, aby regularnie korzystali z ochrony antywirusowej. Informacje dot. aktualizacji zabezpieczeń (Security Updates) można znaleźć na stronie www.kuka.com.
24 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
3. Bezpieczeństwo
Narzędzia lub roboty nie mogą nigdy dotykać ogrodzenia lub poza nie wystawać. Części konstrukcyjne, narzędzia i inne przedmioty nie mogą być zaciskane, prowadzić do zwarć, ani spadać podczas ruchu robota.
Środki bezpieczeństwa podczas programowania w strefie zagrożenia robota:
Robot może być przesuwany wyłącznie ze zredukowaną prędkością (maks. 250 mm/s). Dzięki temu ludzie mają wystarczającą ilość czasu, aby usunąć się przed stwarzającymi zagrożenie ruchami robota lub zatrzymać go. Aby inne osoby nie mogły przesuwać robota, panel KCP musi się znajdować w zasięgu programisty.Jeżeli przy urządzeniu pracuje więcej osób, każda z nich musi korzystać z przycisku zatwierdzającego. Podczas przesuwania robota wszystkie osoby muszą pozostać w kontakcie wzrokowym i widzieć bezpośrednio system robota.
3.7.6 Tryb automatyczny
Praca w trybie automatycznym jest dozwolona wyłącznie przy zachowaniu następujących środków bezpieczeństwa.
Przewidziane urządzenia zabezpieczające są zainstalowane i sprawne technicznie.W strefie roboczej instalacji nie przebywają żadne osoby.Przestrzegane są określone procedury robocze.
Jeżeli robot ulegnie zatrzymaniu bez wyraźnego powodu, do strefy zagrożenia można wejść dopiero po włączeniu się funkcji WYŁĄCZENIA AWARYJNEGO.
3.7.7 Konserwacja i naprawa
Konserwacja i naprawa mają zapewnić utrzymanie lub, w przypadku awarii, ponowne przywrócenie sprawnego stanu technicznego urządzenia. Naprawa obejmuje wyszukiwanie usterek i naprawę właściwą.
Podczas wykonywania czynności związanych z systemem robota należy podjąć następujące środki bezpieczeństwa:
Czynności robocze wykonywać poza strefą zagrożenia. Jeżeli czynności robocze należy wykonywać w strefie zagrożenia, użytkownik musi podjąć dodatkowe środki ostrożności, aby zagwarantować bezpieczeństwo personelowi.Wyłączyć układ sterowania robota i zabezpieczyć przed niepowołanym ponownym włączeniem (np. za pomocą kłódki). Jeżeli czynności robocze należy wykonywać przy włączonym układzie sterowania robota, użytkownik musi podjąć dodatkowe środki ostrożności, aby zagwarantować bezpieczeństwo personelowi.Wykonywanie czynności roboczych należy oznaczyć za pomocą tabliczki, umieszczonej na urządzeniu. Tabliczkę należy tam pozostawić również w trakcie tymczasowej przerwy w wykonywaniu czynności.Urządzenia WYŁĄCZENIA AWARYJNEGO muszą być aktywne. Jeżeli urządzenia zabezpieczające zostaną wyłączone na czas prac związanych z konserwacją i naprawą, po zakończeniu tych prac należy je natychmiast ponownie włączyć.Czynności związane z systemem robota należy przeprowadzać w trybie testowym T1.
25 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Wadliwe komponenty należy wymienić na nowe o tym samym numerze katalogowym lub na komponenty uznane przez firmę KUKA Roboter za równoważne.
Czyszczenie i czynności pielęgnacyjne należy wykonywać zgodnie z instrukcją obsługi.
Układ sterowania robota
Części, połączone z urządzeniami peryferyjnymi, mogą się znajdować pod napięciem również po wyłączeniu układu sterowania robota. Dlatego też, źródła zewnętrzne muszą zostać wyłączone lub odizolowane podczas prac przy układzie sterowania robota.
W przypadku wykonywania prac związanych z komponentami układu sterowania robota, należy przestrzegać przepisów dot. podzespołów zagrożonych elektrostatycznie (niem. EGB).
Po wyłączeniu układu sterowania robota, w module KPS 600 (KUKA Power Supply), modułach KSD (KUKA Servo Drive) oraz na przewodach łączących obwody pośrednie może występować napięcie większe niż 50 V (do 600 V) przez okres do 5 minut. Aby nie dopuścić do powstania groźnych dla życia obrażeń, nie wolno w tym czasie przeprowadzać żadnych prac związanych z układem sterowania robota.
Należy bezwzględnie zapobiegać przedostawaniu się zanieczyszczeń, takich jak np. wióry, woda, pył, do układu sterowania robota.
Przeciwwaga Niektóre warianty robota wyposażone są w przeciwwagę hydropneumatyczną, sprężynową lub gazową.
Systemy przeciwwag odpowiadają kategorii III, grupa płynów 2 dyrektywy 97/23/WE (dyrektywa "Urządzenia ciśnieniowe").
Użytkownik musi przestrzegać ustaw, przepisów i norm dotyczących urządzeń ciśnieniowych, obowiązujących w kraju przeznaczenia.
Podczas wykonywania czynności związanych z systemem przeciwwagi należy podjąć następujące środki bezpieczeństwa:
Podzespoły robota wspomagane przez systemy przeciwwagi muszą zostać zabezpieczone.Czynności związane z systemem przeciwwagi może wykonywać wyłącznie wykwalifikowany personel.
Substancje niebezpieczne
Środki bezpieczeństwa podczas pracy z substancjami niebezpiecznymi:
Unikać dłuższego i powtarzającego się intensywnego kontaktu substancji niebezpiecznych ze skórą.W miarę możliwości unikać wdychania mgieł i oparów oleju.Dbać o właściwe oczyszczanie i pielęgnację skóry.
Dalsze informacje znajdują się w instrukcji obsługi układu sterowania robota.
Dla potrzeb bezpiecznej eksploatacji naszych produktów zalecamy naszym klientom, aby regularnie domagali się przekazania im aktualnych Kart Bezpieczeństwa przez producentów substancji niebezpiecznych. Informacje dot. stosowanych substancji niebezpiecznych można znaleźć w dokumencie Materiały eksploatacyjne, Karta Bezpieczeństwa.
26 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl

V1.1
3. Bezpieczeństwo
3.7.8 Wycofanie z eksploatacji, składowanie i usuwanie
Wycofanie z eksploatacji, składowanie i usuwanie systemu robota może odbywać się wyłącznie zgodnie z ustawami, przepisami i normami, obowiązującymi w kraju przeznaczenia.
Dalsze informacje znajdują się w instrukcji obsługi robota oraz instrukcji obsługi układu sterowania robota.
27 / 12820.07.2006 KSS-AD-EA-5x pl

Instrukcja obsługi i programowania
28 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
4. Programator KCP
4 Programator KCP
4.1 Strona przednia
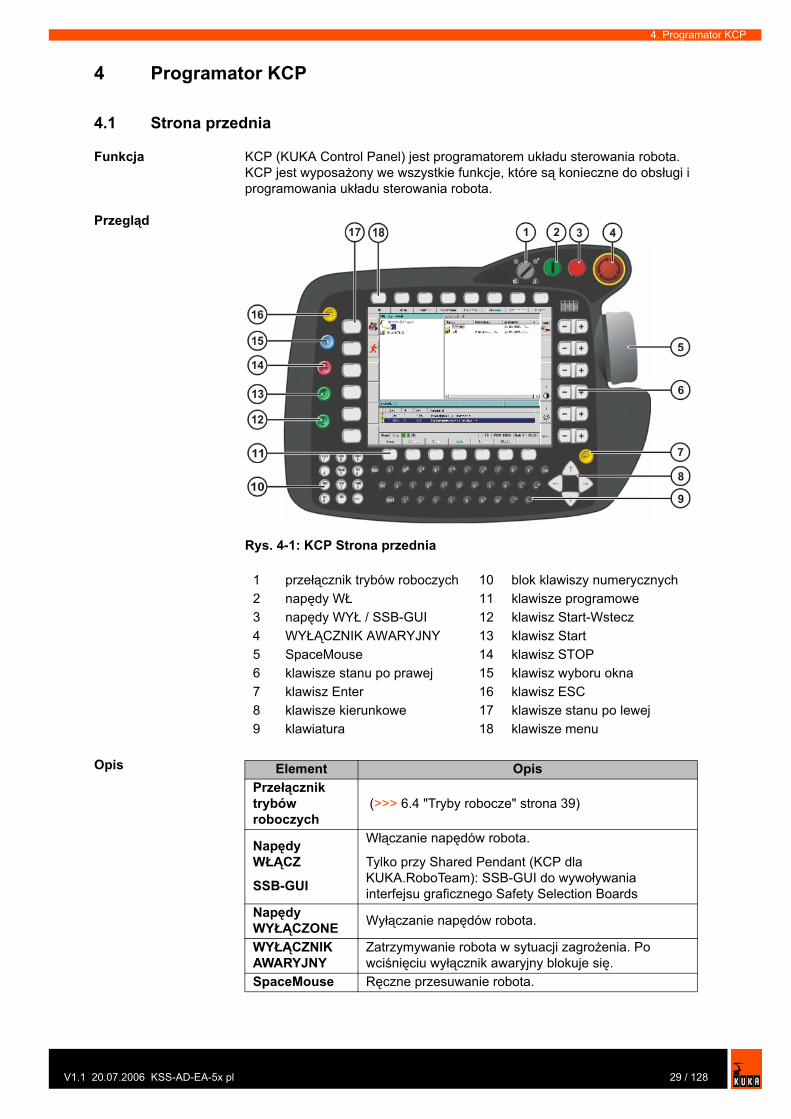
Funkcja KCP (KUKA Control Panel) jest programatorem układu sterowania robota. KCP jest wyposażony we wszystkie funkcje, które są konieczne do obsługi i programowania układu sterowania robota.
Przegląd
Opis
Rys. 4-1: KCP Strona przednia
1 przełącznik trybów roboczych 10 blok klawiszy numerycznych2 napędy WŁ 11 klawisze programowe3 napędy WYŁ / SSB-GUI 12 klawisz Start-Wstecz4 WYŁĄCZNIK AWARYJNY 13 klawisz Start5 SpaceMouse 14 klawisz STOP6 klawisze stanu po prawej 15 klawisz wyboru okna7 klawisz Enter 16 klawisz ESC8 klawisze kierunkowe 17 klawisze stanu po lewej9 klawiatura 18 klawisze menu
Element OpisPrzełącznik trybów roboczych
(>>> 6.4 "Tryby robocze" strona 39)
Napędy WŁĄCZ
SSB-GUI
Włączanie napędów robota.
Tylko przy Shared Pendant (KCP dla KUKA.RoboTeam): SSB-GUI do wywoływania interfejsu graficznego Safety Selection Boards
Napędy WYŁĄCZONE Wyłączanie napędów robota.
WYŁĄCZNIK AWARYJNY
Zatrzymywanie robota w sytuacji zagrożenia. Po wciśnięciu wyłącznik awaryjny blokuje się.
SpaceMouse Ręczne przesuwanie robota.
29 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
4.2 Klawiatura
Klawisze stanu po prawej stronie
(>>> 5.1 "Klawisze stanu, klawisze menu, klawisze programowe" strona 33)
Klawisz Enter Przy pomocy klawisza Enter można zamykać aktywne okno lub formularz. Zmiany zostają zaakceptowane.
Klawisze kierunkowe
Przy pomocy klawiszy kierunkowych można przechodzić na interfejsie graficznym między poszczególnymi elementami.
Klawiatura (>>> 4.2 "Klawiatura" strona 30)Blok klawiszy numerycznych (>>> 4.3 "Blok klawiszy numerycznych" strona 31)
Klawisze programowe
(>>> 5.1 "Klawisze stanu, klawisze menu, klawisze programowe" strona 33)
Klawisz Start-Wstecz
Przycisku Start-Wstecz uruchamia program od tyłu. Program jest wykonywany stopniowo.
Klawisz Start Przycisku Start uruchamia program.Klawisz STOP Przycisk STOP zatrzymuje wykonywany program.
Klawisz wyboru okna
Przycisk wyboru okna służy do przełączania między oknem głównym, oknem opcji i oknem komunikatów. Wybrane okno jest podświetlane na niebiesko.
Klawisz ESC Przycisk ESC anuluje daną akcję na interfejsie graficznym.
Klawisze stanu po lewej
(>>> 5.1 "Klawisze stanu, klawisze menu, klawisze programowe" strona 33)
Klawisze menu (>>> 5.1 "Klawisze stanu, klawisze menu, klawisze programowe" strona 33)
Element Opis
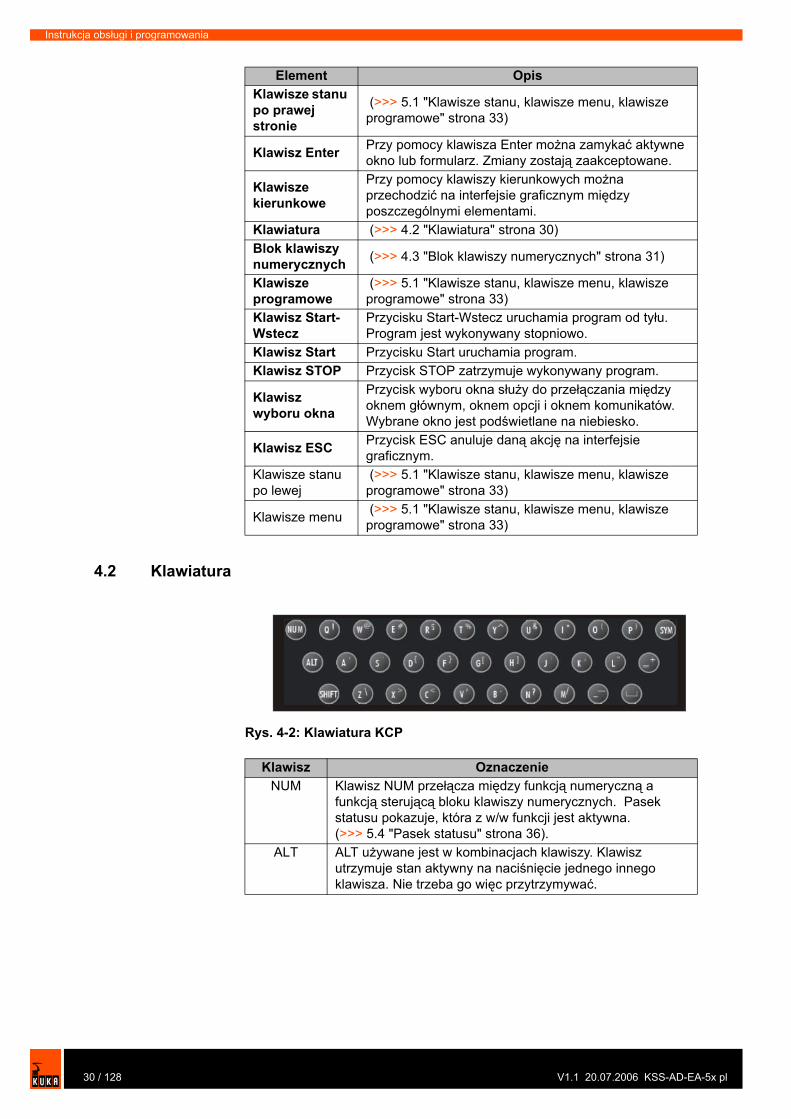
Rys. 4-2: Klawiatura KCP
Klawisz OznaczenieNUM Klawisz NUM przełącza między funkcją numeryczną a
funkcją sterującą bloku klawiszy numerycznych. Pasek statusu pokazuje, która z w/w funkcji jest aktywna. (>>> 5.4 "Pasek statusu" strona 36).
ALT ALT używane jest w kombinacjach klawiszy. Klawisz utrzymuje stan aktywny na naciśnięcie jednego innego klawisza. Nie trzeba go więc przytrzymywać.
30 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
4. Programator KCP
4.3 Blok klawiszy numerycznych
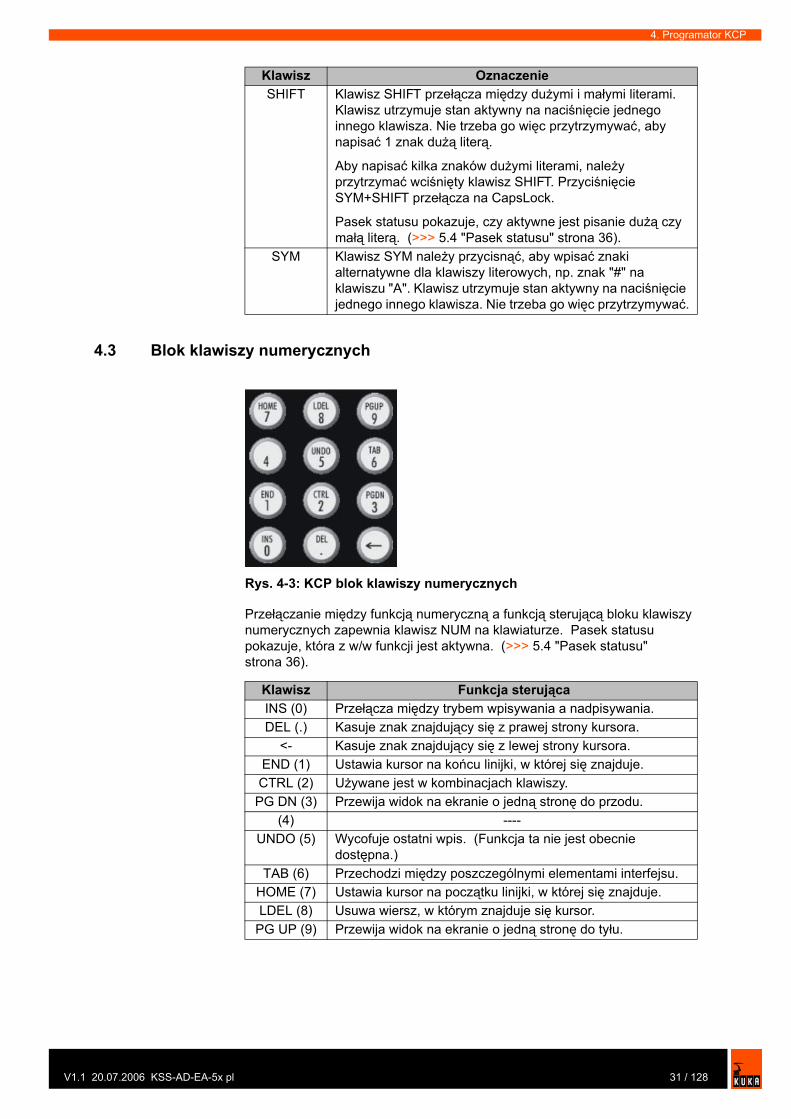
Przełączanie między funkcją numeryczną a funkcją sterującą bloku klawiszy numerycznych zapewnia klawisz NUM na klawiaturze. Pasek statusu pokazuje, która z w/w funkcji jest aktywna. (>>> 5.4 "Pasek statusu" strona 36).
SHIFT Klawisz SHIFT przełącza między dużymi i małymi literami. Klawisz utrzymuje stan aktywny na naciśnięcie jednego innego klawisza. Nie trzeba go więc przytrzymywać, aby napisać 1 znak dużą literą.
Aby napisać kilka znaków dużymi literami, należy przytrzymać wciśnięty klawisz SHIFT. Przyciśnięcie SYM+SHIFT przełącza na CapsLock.
Pasek statusu pokazuje, czy aktywne jest pisanie dużą czy małą literą. (>>> 5.4 "Pasek statusu" strona 36).
SYM Klawisz SYM należy przycisnąć, aby wpisać znaki alternatywne dla klawiszy literowych, np. znak "#" na klawiszu "A". Klawisz utrzymuje stan aktywny na naciśnięcie jednego innego klawisza. Nie trzeba go więc przytrzymywać.
Klawisz Oznaczenie
Rys. 4-3: KCP blok klawiszy numerycznych
Klawisz Funkcja sterującaINS (0) Przełącza między trybem wpisywania a nadpisywania. DEL (.) Kasuje znak znajdujący się z prawej strony kursora.
<- Kasuje znak znajdujący się z lewej strony kursora.END (1) Ustawia kursor na końcu linijki, w której się znajduje. CTRL (2) Używane jest w kombinacjach klawiszy.PG DN (3) Przewija widok na ekranie o jedną stronę do przodu.
(4) ----UNDO (5) Wycofuje ostatni wpis. (Funkcja ta nie jest obecnie
dostępna.)TAB (6) Przechodzi między poszczególnymi elementami interfejsu.
HOME (7) Ustawia kursor na początku linijki, w której się znajduje. LDEL (8) Usuwa wiersz, w którym znajduje się kursor.
PG UP (9) Przewija widok na ekranie o jedną stronę do tyłu.
31 / 12820.07.2006 KSS-AD-EA-5x pl

Instrukcja obsługi i programowania
4.4 Strona tylna
Przegląd
Opis
Rys. 4-4: Tylna strona KCP
1 Tabliczka znamionowa 4 Przycisk zatwierdzający2 Klawisz Start 5 Przycisk zatwierdzający3 Przycisk zatwierdzający
Element OpisTabliczka znamionowa Tabliczka znamionowa KCP
Klawisz Start Przy pomocy klawisza Start uruchomiony zostaje program.
Przycisk zatwierdzający
Przycisk zatwierdzający ma 3 pozycje:
Nie wciśniętyPozycja środkowaCałkowicie wciśnięty
Przycisk zatwierdzający musi w trybach roboczych T1 i T2 pozostawać w pozycji środkowej, aby robot mógł się przesuwać.
W trybach roboczych Automatyka i Automatyka zewnętrzna przycisk zatwierdzający nie posiada żadnej funkcji.
32 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
5. Interfejs graficzny KUKA.HMI
5 Interfejs graficzny KUKA.HMI
5.1 Klawisze stanu, klawisze menu, klawisze programowe
Przegląd
Opis
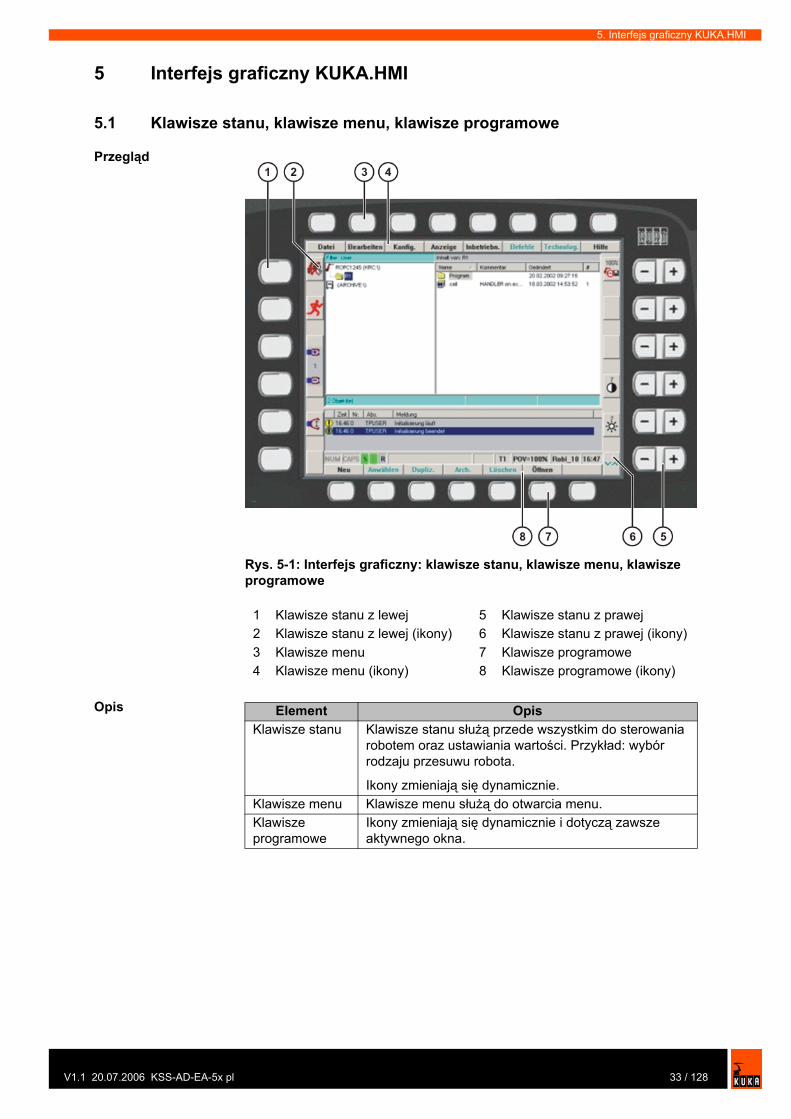
Rys. 5-1: Interfejs graficzny: klawisze stanu, klawisze menu, klawisze programowe
1 Klawisze stanu z lewej 5 Klawisze stanu z prawej2 Klawisze stanu z lewej (ikony) 6 Klawisze stanu z prawej (ikony)3 Klawisze menu 7 Klawisze programowe4 Klawisze menu (ikony) 8 Klawisze programowe (ikony)
Element OpisKlawisze stanu Klawisze stanu służą przede wszystkim do sterowania
robotem oraz ustawiania wartości. Przykład: wybór rodzaju przesuwu robota.
Ikony zmieniają się dynamicznie.Klawisze menu Klawisze menu służą do otwarcia menu.Klawisze programowe
Ikony zmieniają się dynamicznie i dotyczą zawsze aktywnego okna.
33 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
5.2 Okna na interfejsie graficznym
Przegląd
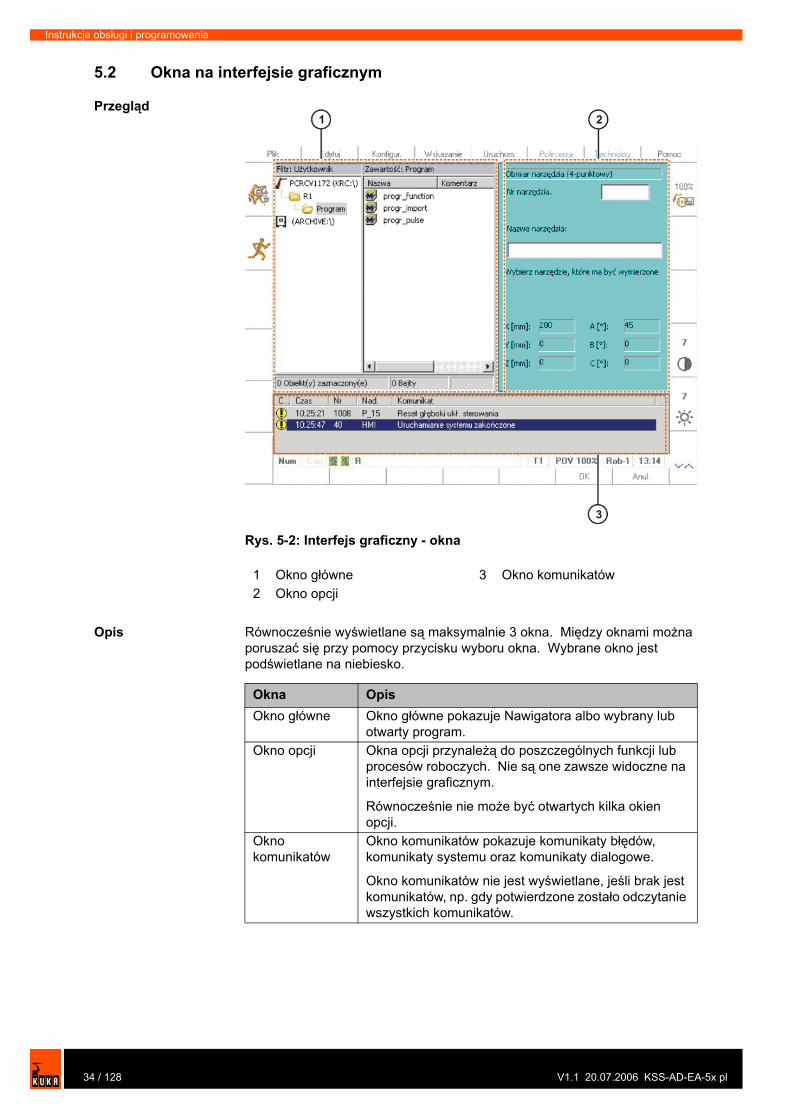
Opis Równocześnie wyświetlane są maksymalnie 3 okna. Między oknami można poruszać się przy pomocy przycisku wyboru okna. Wybrane okno jest podświetlane na niebiesko.
Rys. 5-2: Interfejs graficzny - okna
1 Okno główne 3 Okno komunikatów2 Okno opcji
Okna OpisOkno główne Okno główne pokazuje Nawigatora albo wybrany lub
otwarty program. Okno opcji Okna opcji przynależą do poszczególnych funkcji lub
procesów roboczych. Nie są one zawsze widoczne na interfejsie graficznym.
Równocześnie nie może być otwartych kilka okien opcji.
Okno komunikatów
Okno komunikatów pokazuje komunikaty błędów, komunikaty systemu oraz komunikaty dialogowe.
Okno komunikatów nie jest wyświetlane, jeśli brak jest komunikatów, np. gdy potwierdzone zostało odczytanie wszystkich komunikatów.
34 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
5. Interfejs graficzny KUKA.HMI
5.3 Elementy na interfejsie graficznym
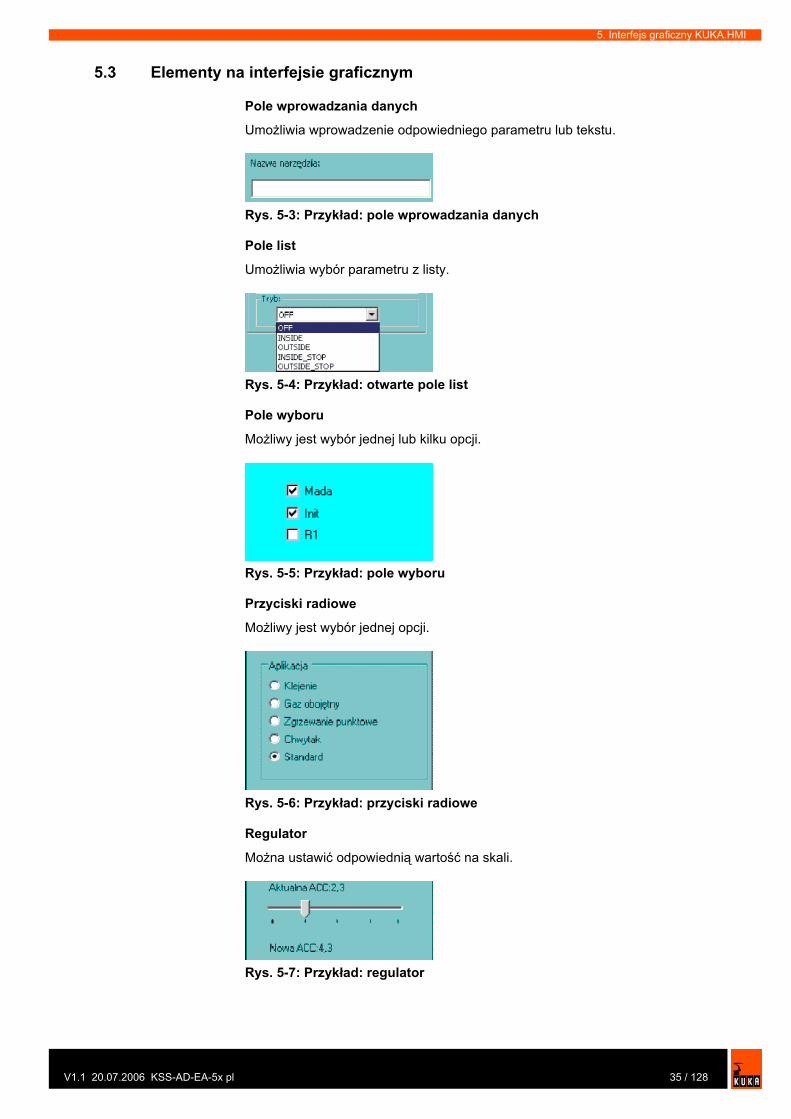
Pole wprowadzania danych
Umożliwia wprowadzenie odpowiedniego parametru lub tekstu.
Pole list
Umożliwia wybór parametru z listy.
Pole wyboru
Możliwy jest wybór jednej lub kilku opcji.
Przyciski radiowe
Możliwy jest wybór jednej opcji.
Regulator
Można ustawić odpowiednią wartość na skali.
Rys. 5-3: Przykład: pole wprowadzania danych
Rys. 5-4: Przykład: otwarte pole list
Rys. 5-5: Przykład: pole wyboru
Rys. 5-6: Przykład: przyciski radiowe
Rys. 5-7: Przykład: regulator
35 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Grupa
Pola mogą być pogrupowane. Grupa pól zaznaczona jest ramką. W lewym górnym rogu zazwyczaj znajduje się nazwa grupy.
5.4 Pasek statusu
Przegląd
Opis
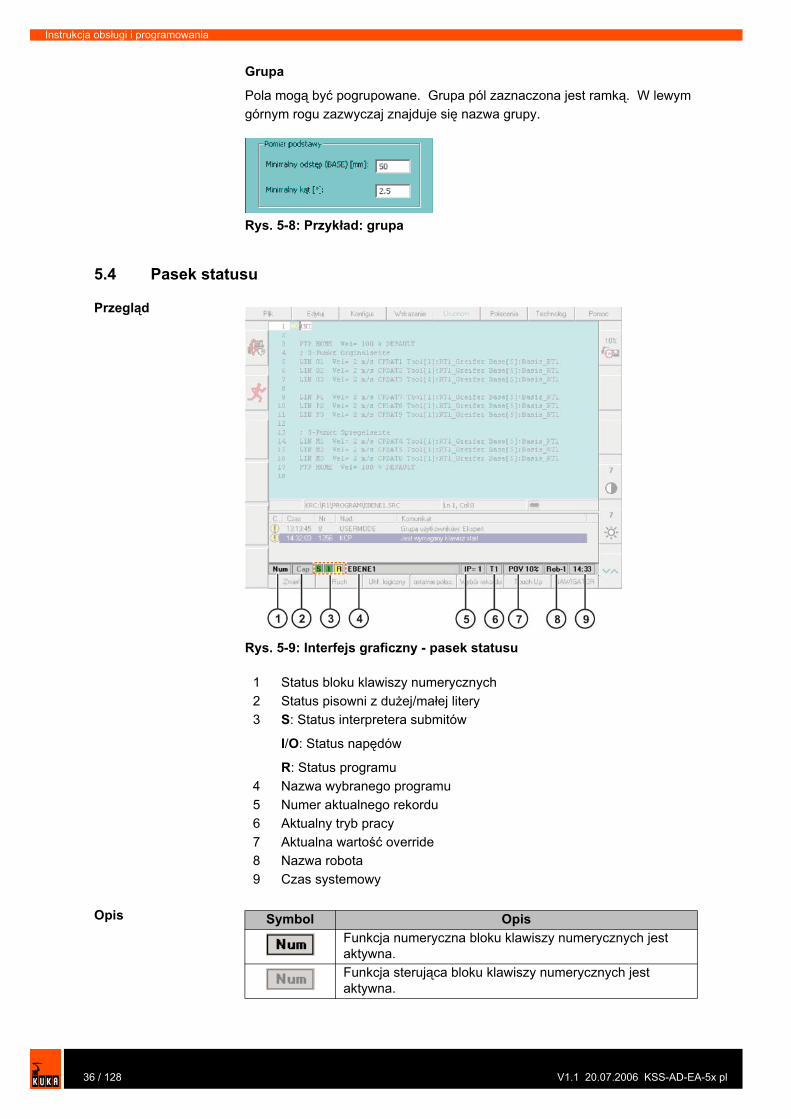
Rys. 5-8: Przykład: grupa
Rys. 5-9: Interfejs graficzny - pasek statusu
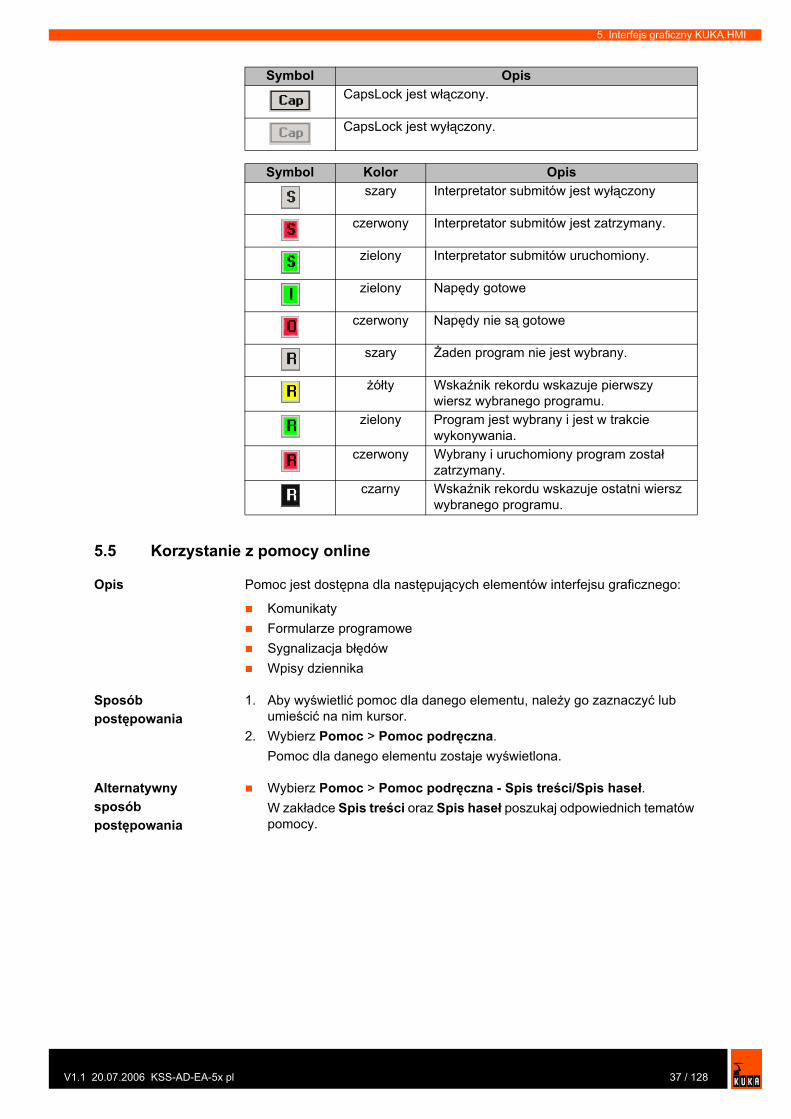
1 Status bloku klawiszy numerycznych2 Status pisowni z dużej/małej litery3 S: Status interpretera submitów
I/O: Status napędów
R: Status programu4 Nazwa wybranego programu5 Numer aktualnego rekordu6 Aktualny tryb pracy7 Aktualna wartość override8 Nazwa robota9 Czas systemowy
Symbol OpisFunkcja numeryczna bloku klawiszy numerycznych jest aktywna. Funkcja sterująca bloku klawiszy numerycznych jest aktywna.
36 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
5. Interfejs graficzny KUKA.HMI
5.5 Korzystanie z pomocy online
Opis Pomoc jest dostępna dla następujących elementów interfejsu graficznego:
KomunikatyFormularze programoweSygnalizacja błędówWpisy dziennika
Sposób postępowania
1. Aby wyświetlić pomoc dla danego elementu, należy go zaznaczyć lub umieścić na nim kursor.
2. Wybierz Pomoc > Pomoc podręczna. Pomoc dla danego elementu zostaje wyświetlona.
Alternatywny sposób postępowania
Wybierz Pomoc > Pomoc podręczna - Spis treści/Spis haseł.W zakładce Spis treści oraz Spis haseł poszukaj odpowiednich tematów pomocy.
CapsLock jest włączony.
CapsLock jest wyłączony.
Symbol Kolor Opisszary Interpretator submitów jest wyłączony
czerwony Interpretator submitów jest zatrzymany.
zielony Interpretator submitów uruchomiony.
zielony Napędy gotowe
czerwony Napędy nie są gotowe
szary Żaden program nie jest wybrany.
żółty Wskaźnik rekordu wskazuje pierwszy wiersz wybranego programu.
zielony Program jest wybrany i jest w trakcie wykonywania.
czerwony Wybrany i uruchomiony program został zatrzymany.
czarny Wskaźnik rekordu wskazuje ostatni wiersz wybranego programu.
Symbol Opis
37 / 12820.07.2006 KSS-AD-EA-5x pl

Instrukcja obsługi i programowania
38 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
6. Obsługa
6 Obsługa
6.1 Włączanie układu sterowania robota
Sposób postępowania
Przesuń włącznik-wyłącznik główny układu sterowania robota w położenie ON. System operacyjny i KSS uruchamiają się automatycznie.
Jeśli układ sterowania robota jest zgłoszony w sieci, procedura włączania może trwać dłużej.
6.2 Wyłączanie układu sterowania robota
Sposób postępowania
Przesuń włącznik-wyłącznik główny układu sterowania robota w położenie OFF. Układ sterowania robota automatycznie zachowuje dane.
6.3 Zmiana grupy użytkowników
Opis W zależności od aktywnej grupy użytkowników w KSS dostępne są różne funkcje. Możliwe są następujące grupy użytkowników:
UżytkownikGrupa użytkowników dla operatoraEkspertGrupa użytkowników dla programisty W tej grupie użytkowników możliwe jest przełączenie na poziom systemu Windows. AdministratorFunkcje jak dla grupy użytkowników Ekspert. Ponadto dostępna jest opcja dołączania dodatków plug-ins do układu sterowania robota.
Przy uruchamianiu urządzenia wybierana jest domyślnie grupa użytkowników Użytkownik. Grupy użytkowników Ekspert oraz Administrator są chronione hasłami dostępu.
Sposób postępowania
1. Wybierz Konfiguracja > Grupa użytkowników.Wyświetlana jest aktualna grupa użytkowników.
2. Przy pomocy klawiszy programowych wybierz nową grupę użytkowników. 3. Jeśli wymagane:
Wprowadź hasło i potwierdź wciskając OK.
6.4 Tryby robocze
Tryb roboczy wybierany jest przy pomocy przełącznika trybów roboczych, znajdującego się na KCP. Przełącznik uruchamiany jest kluczem, który można wyjąć. Jeśli klucz zostanie wyjęty, przełącznik jest zablokowany a tryb roboczy nie może zostać zmieniony.
Jeśli tryb roboczy zmieniany jest podczas pracy urządzenia, napędy zostają natychmiast wyłączone i robot zatrzymuje się przy pomocy STOP 0.
W zależności od indywidualnych ustawień możliwe jest definiowanie dalszych grup użytkowników.
39 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
6.5 Układy współrzędnych
Przegląd W systemie robota zdefiniowane są następujące kartezjańskie układy współrzędnych:
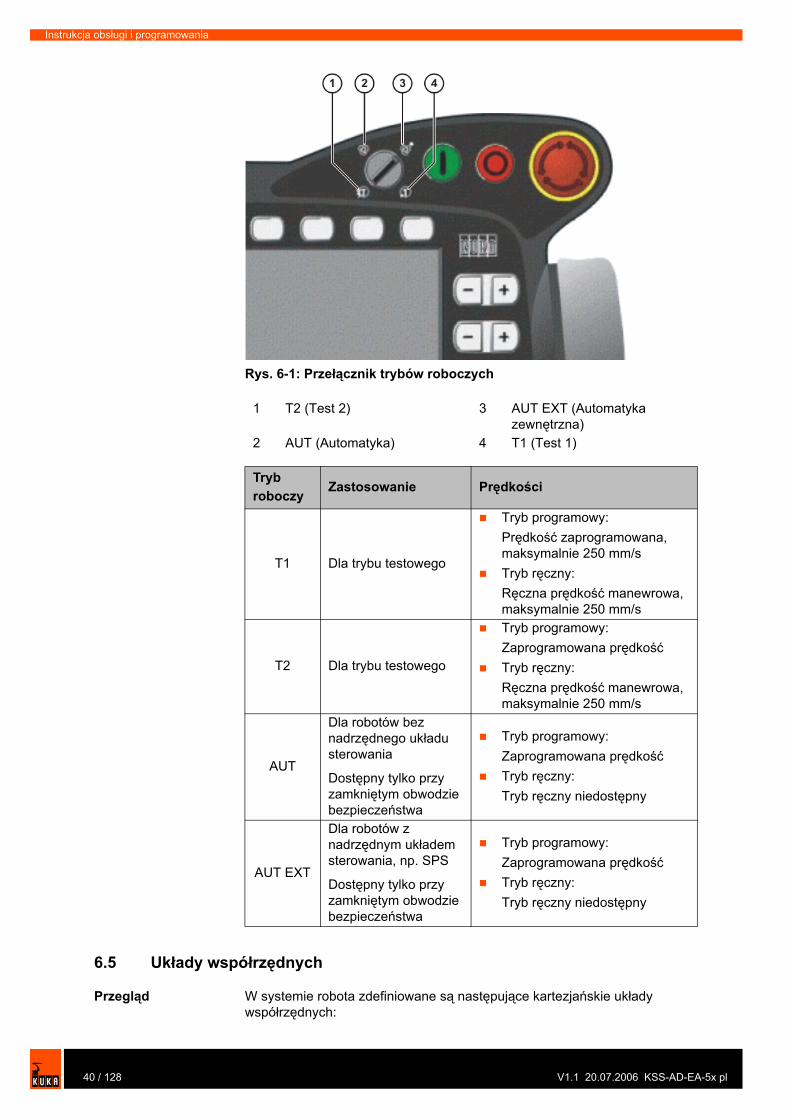
Rys. 6-1: Przełącznik trybów roboczych
1 T2 (Test 2) 3 AUT EXT (Automatyka zewnętrzna)
2 AUT (Automatyka) 4 T1 (Test 1)
Tryb roboczy
Zastosowanie Prędkości
T1 Dla trybu testowego
Tryb programowy:Prędkość zaprogramowana, maksymalnie 250 mm/sTryb ręczny:Ręczna prędkość manewrowa, maksymalnie 250 mm/s
T2 Dla trybu testowego
Tryb programowy:Zaprogramowana prędkośćTryb ręczny:Ręczna prędkość manewrowa, maksymalnie 250 mm/s
AUT
Dla robotów bez nadrzędnego układu sterowania
Dostępny tylko przy zamkniętym obwodzie bezpieczeństwa
Tryb programowy:Zaprogramowana prędkośćTryb ręczny:Tryb ręczny niedostępny
AUT EXT
Dla robotów z nadrzędnym układem sterowania, np. SPS
Dostępny tylko przy zamkniętym obwodzie bezpieczeństwa
Tryb programowy:Zaprogramowana prędkośćTryb ręczny:Tryb ręczny niedostępny
40 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
6. Obsługa
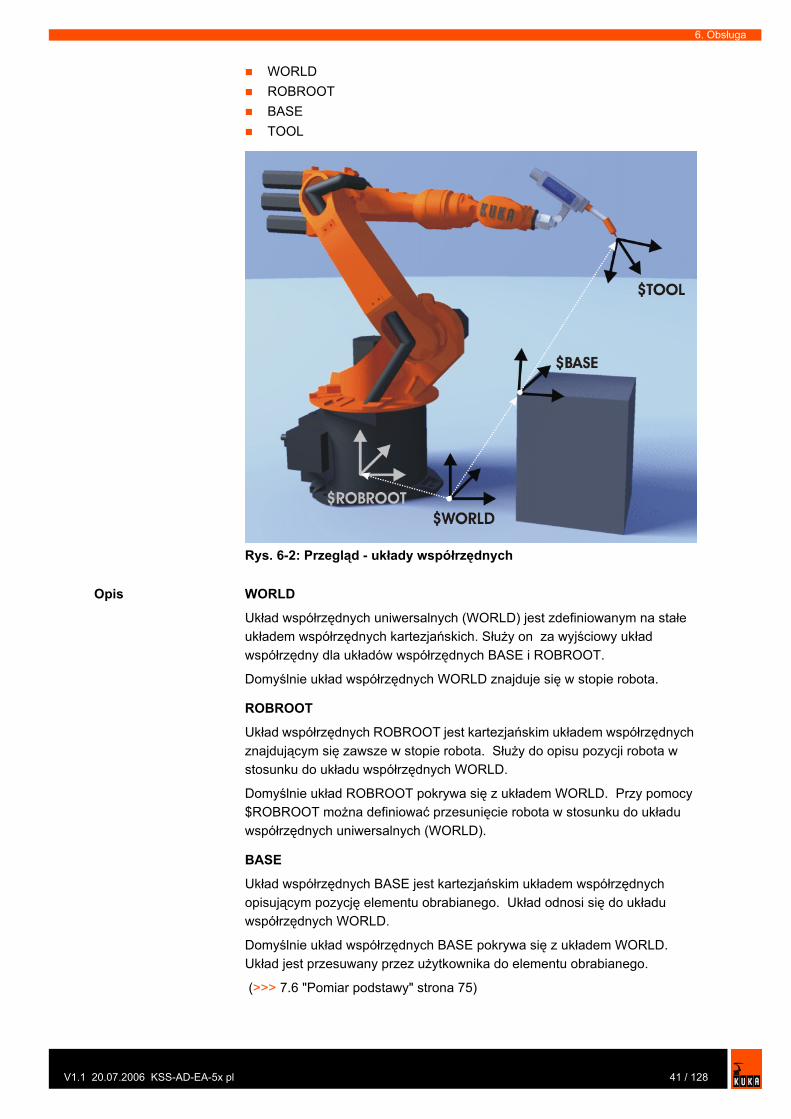
WORLDROBROOTBASETOOL
Opis WORLD
Układ współrzędnych uniwersalnych (WORLD) jest zdefiniowanym na stałe układem współrzędnych kartezjańskich. Służy on za wyjściowy układ współrzędny dla układów współrzędnych BASE i ROBROOT.
Domyślnie układ współrzędnych WORLD znajduje się w stopie robota.
ROBROOT
Układ współrzędnych ROBROOT jest kartezjańskim układem współrzędnych znajdującym się zawsze w stopie robota. Służy do opisu pozycji robota w stosunku do układu współrzędnych WORLD.
Domyślnie układ ROBROOT pokrywa się z układem WORLD. Przy pomocy $ROBROOT można definiować przesunięcie robota w stosunku do układu współrzędnych uniwersalnych (WORLD).
BASE
Układ współrzędnych BASE jest kartezjańskim układem współrzędnych opisującym pozycję elementu obrabianego. Układ odnosi się do układu współrzędnych WORLD.
Domyślnie układ współrzędnych BASE pokrywa się z układem WORLD. Układ jest przesuwany przez użytkownika do elementu obrabianego.
(>>> 7.6 "Pomiar podstawy" strona 75)
Rys. 6-2: Przegląd - układy współrzędnych
41 / 12820.07.2006 KSS-AD-EA-5x pl

Instrukcja obsługi i programowania
TOOL
Układ współrzędnych narzędzia (TOOL) jest kartezjańskim układem współrzędnych, którego początek leży w narzędziu. Układ odnosi się do układu współrzędnych BASE.
Środek układu współrzędnych TOOL znajduje się domyślnie w punkcie środkowym kołnierza. (Nazywany jest wtedy układem współrzędnych FLANGE.) Układ współrzędnych TOOL jest przesuwany przez użytkownika do punktu roboczego narzędzia.
(>>> 7.5 "Pomiar narzędzia" strona 69)
6.6 Ręczne przesuwanie robota
Opis Istnieją 2 sposoby ręcznego przesuwania robota:
Przesuwanie kartezyjskieTCP jest przesuwany w kierunku dodatnim lub ujemnym wzdłuż osi układu współrzędnych. Przesuwanie w odniesieniu do osiKażda oś może być przesuwana pojedynczo w kierunku dodatnim lub ujemnym.
Istnieją dwa elementy sterownicze służące do przesuwania robota:
Przyciski ruchoweSpaceMouse
Rys. 6-3: Przesuwanie robota w odniesieniu do osi
42 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
6. Obsługa
Przegląd
6.6.1 Ustawianie Hand-Override (HOV)
Opis Hand-Override jest prędkością robota w trybie ręcznego przesuwania. Parametr ten podawany jest w procentach i odnosi się do maksymalnej możliwej prędkości dla przesuwania robota w trybie ręcznym. Prędkość ta wynosi 250mm/s.
Przygotowanie Określ stopniowanie HOV:Wybierz Konfiguracja > Przesuwanie ręczne (Override) > Kroki OV ręcznie.
Sposób postępowania
1. W lewym pasku klawiszy stanu wybierz sposób przesuwania "przyciski ruchowe" lub "SpaceMouse":
albo 2. W prawym pasku klawiszy stanu zwiększ lub zmniejsz parametr override.
Klawisz stanu zawsze pokazuje aktualną wartość override w procentach.
6.6.2 Wybór narzędzia i podstawy
Opis W układzie sterowania robota może być zapisanych maksymalnie 16 układów współrzędnych TOOL oraz 32 układy BASE. Dla przesuwania kartezjańskiego musi być wybrane jedno narzędzie (układ współrzędnych TOOL) oraz jedna podstawa (układ BASE).
Sposób postępowania
1. Wybierz Konfiguracja > Aktualne narzędzie/Podstawa.2. Na pasku klawiszy programowych wybierz, czy używane będzie narzędzie
stacjonarne: Zew. narz.: Narzędzie jest narzędziem stacjonarnym. Narz.: Narzędzie jest zamontowane na kołnierzu montażowym.
3. W polu Narzędzie nr wpisz numer żądanego narzędzia.4. W polu Układ podstawowy nr wpisz numer żądanej podstawy.5. Naciśnij OK.
Przesuwanie kartezyjskie Przesuwanie robota w odniesieniu do osi
Klawisze ruchowe
(>>> 6.6.4 "Przesuwanie kartezyjskie przy pomocy klawiszy ruchowych" strona 44)
(>>> 6.6.3 "Przesuwanie w odniesieniu do osi przy pomocy klawiszy ruchowych" strona 44)
SpaceMouse
(>>> 6.6.7 "Przesuw kartezjański przy pomocy SpaceMouse" strona 47)
Dostępne jest przesuwanie robota względem osi przy pomocy SpaceMouse, procedura ta nie jest jednak opisana.
Aktywny ZnaczenieNie Parametr override można zmieniać z dokładnością
do 1%. Tak Stopniowanie 100%, 75%, 50%, 30%, 10%, 3%, 1%
43 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
6.6.3 Przesuwanie w odniesieniu do osi przy pomocy klawiszy ruchowych
Wymagania Tryb pracy T1 lub T2
Sposób postępowania
1. W lewym pasku klawiszy stanu wybierz sposób przesuwania "przyciski ruchowe":
2. W prawym pasku klawiszy stanu wybierz przesuwanie w odniesieniu do osi:
3. Ustaw Hand-Override. 4. Wciśnij i przytrzymaj przycisk potwierdzający. 5. W prawym pasku klawiszy stanu wyświetlone są osie 1 do 6.
Przyciskając klawisz plus lub minus poruszaj daną osią w kierunku dodatnim lub ujemnym.
6.6.4 Przesuwanie kartezyjskie przy pomocy klawiszy ruchowych
Wymagania Narzędzie i podstawa są wybrane. (>>> 6.6.2 "Wybór narzędzia i podstawy" strona 43)Tryb pracy T1 lub T2
Sposób postępowania
1. W lewym pasku klawiszy stanu wybierz sposób przesuwania "przyciski ruchowe":
2. W prawym pasku klawiszy stanu wybierz układ współrzędnych.3. Ustaw Hand-Override. 4. Wciśnij i przytrzymaj przycisk potwierdzający. 5. W prawym pasku klawiszy stanu wyświetlane są następujące przyciski:
X, Y, Z: dla ruchów liniowych wzdłuż osi wybranego układu współrzędnychA, B, C: dla ruchów obrotowych wokół osi wybranego układu współrzędnychPrzyciskając klawisz plus lub minus poruszaj robotem w kierunku dodatnim lub ujemnym.
6.6.5 Konfiguracja SpaceMouse
Sposób postępowania
1. Wybierz Konfiguracja > Przesuw ręczny (Override) > Konfiguracja myszki.
2. Wybór osi: Wybierz, czy TCP może być przesuwany postępowo, rotacyjnie, czy też na oba sposoby. Dostępne są następujące przyciski programowe:6D; XYZ; ABC
Można wyświetlić pozycję robota podczas przesuwania: Wybierz Widok > Pozycja rzeczywista.
44 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
6. Obsługa
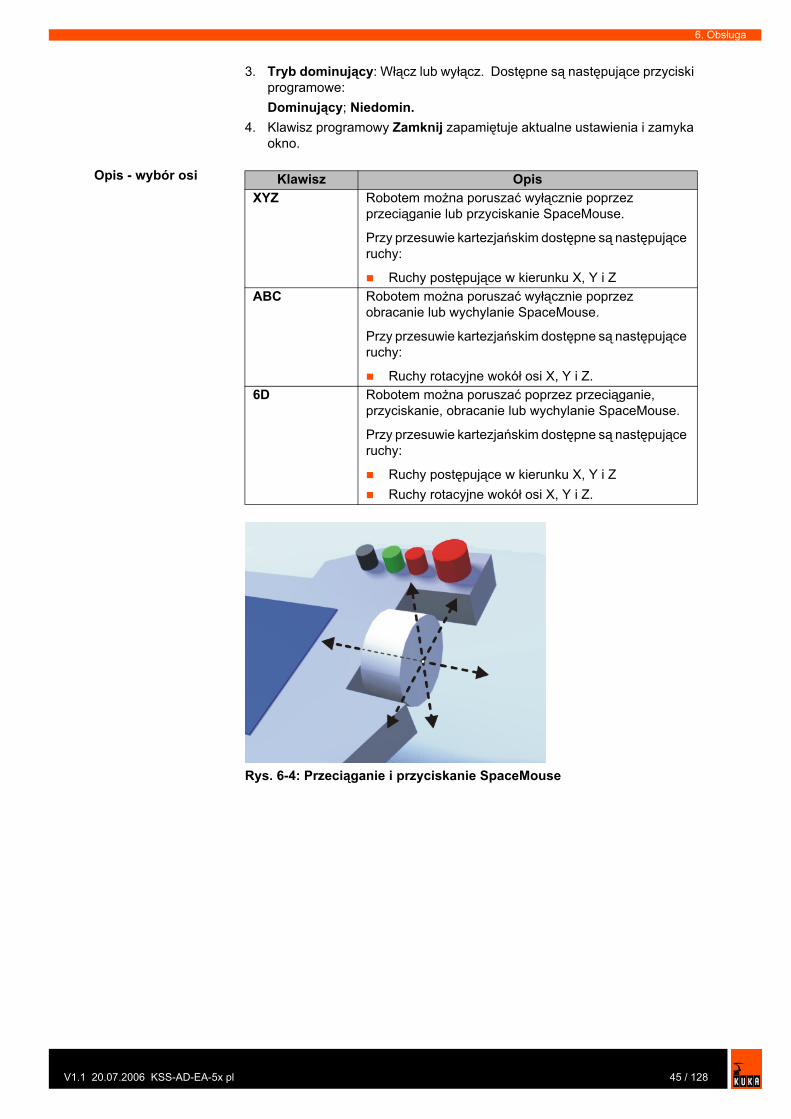
3. Tryb dominujący: Włącz lub wyłącz. Dostępne są następujące przyciski programowe:Dominujący; Niedomin.
4. Klawisz programowy Zamknij zapamiętuje aktualne ustawienia i zamyka okno.
Opis - wybór osi Klawisz OpisXYZ Robotem można poruszać wyłącznie poprzez
przeciąganie lub przyciskanie SpaceMouse.
Przy przesuwie kartezjańskim dostępne są następujące ruchy:
Ruchy postępujące w kierunku X, Y i ZABC Robotem można poruszać wyłącznie poprzez
obracanie lub wychylanie SpaceMouse.
Przy przesuwie kartezjańskim dostępne są następujące ruchy:
Ruchy rotacyjne wokół osi X, Y i Z.6D Robotem można poruszać poprzez przeciąganie,
przyciskanie, obracanie lub wychylanie SpaceMouse.
Przy przesuwie kartezjańskim dostępne są następujące ruchy:
Ruchy postępujące w kierunku X, Y i ZRuchy rotacyjne wokół osi X, Y i Z.
Rys. 6-4: Przeciąganie i przyciskanie SpaceMouse
45 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
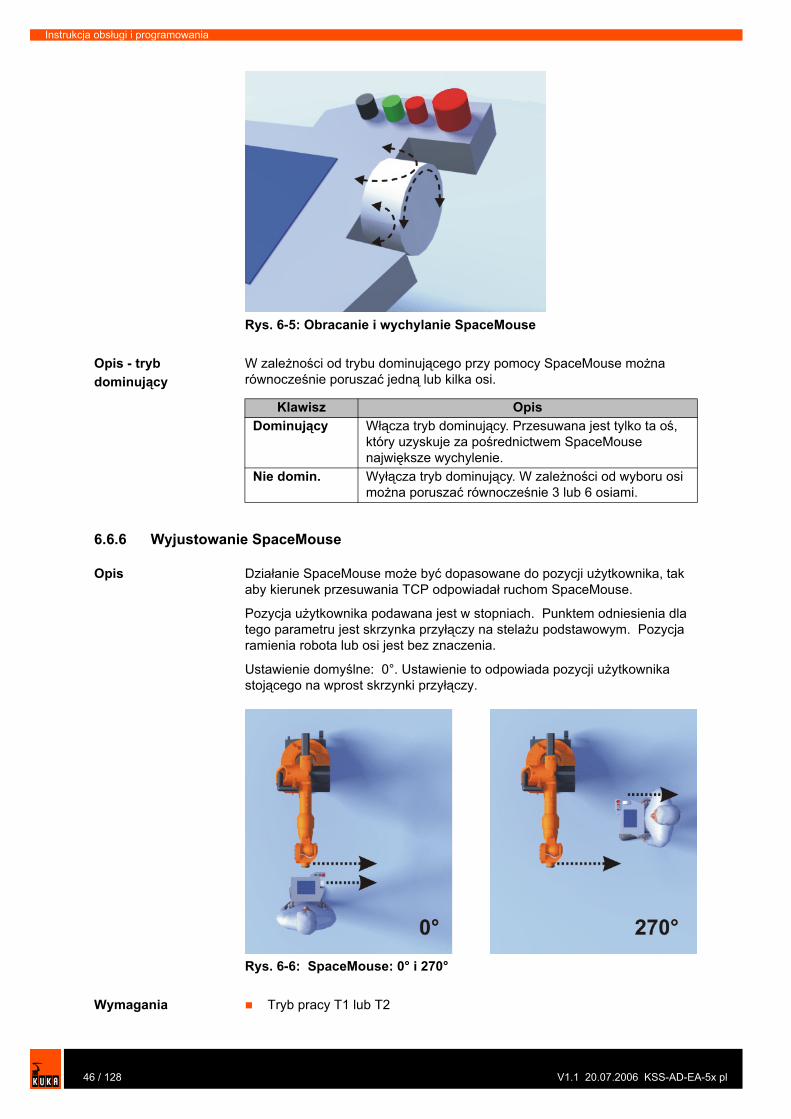
Opis - tryb dominujący
W zależności od trybu dominującego przy pomocy SpaceMouse można równocześnie poruszać jedną lub kilka osi.
6.6.6 Wyjustowanie SpaceMouse
Opis Działanie SpaceMouse może być dopasowane do pozycji użytkownika, tak aby kierunek przesuwania TCP odpowiadał ruchom SpaceMouse.
Pozycja użytkownika podawana jest w stopniach. Punktem odniesienia dla tego parametru jest skrzynka przyłączy na stelażu podstawowym. Pozycja ramienia robota lub osi jest bez znaczenia.
Ustawienie domyślne: 0°. Ustawienie to odpowiada pozycji użytkownika stojącego na wprost skrzynki przyłączy.
Wymagania Tryb pracy T1 lub T2
Rys. 6-5: Obracanie i wychylanie SpaceMouse
Klawisz OpisDominujący Włącza tryb dominujący. Przesuwana jest tylko ta oś,
który uzyskuje za pośrednictwem SpaceMouse największe wychylenie.
Nie domin. Wyłącza tryb dominujący. W zależności od wyboru osi można poruszać równocześnie 3 lub 6 osiami.
Rys. 6-6: SpaceMouse: 0° i 270°
46 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
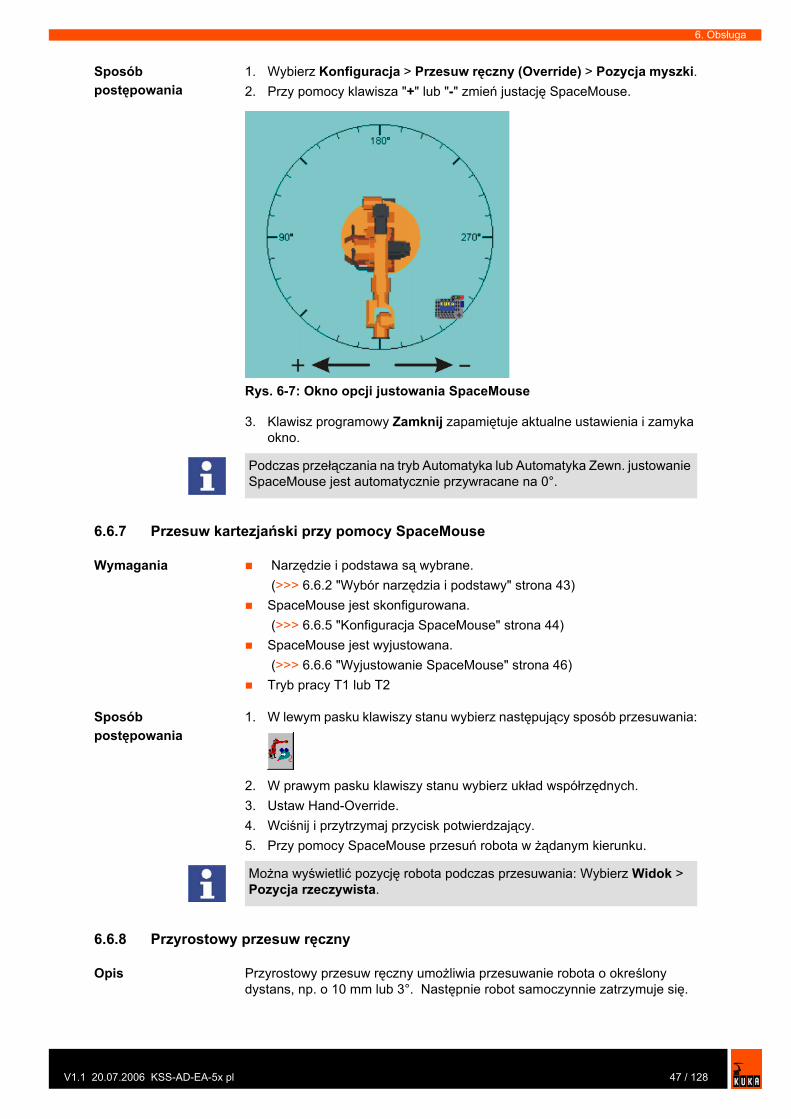
V1.1
6. Obsługa
Sposób postępowania
1. Wybierz Konfiguracja > Przesuw ręczny (Override) > Pozycja myszki.2. Przy pomocy klawisza "+" lub "-" zmień justację SpaceMouse.
3. Klawisz programowy Zamknij zapamiętuje aktualne ustawienia i zamyka okno.
6.6.7 Przesuw kartezjański przy pomocy SpaceMouse
Wymagania Narzędzie i podstawa są wybrane. (>>> 6.6.2 "Wybór narzędzia i podstawy" strona 43)SpaceMouse jest skonfigurowana. (>>> 6.6.5 "Konfiguracja SpaceMouse" strona 44)SpaceMouse jest wyjustowana. (>>> 6.6.6 "Wyjustowanie SpaceMouse" strona 46)Tryb pracy T1 lub T2
Sposób postępowania
1. W lewym pasku klawiszy stanu wybierz następujący sposób przesuwania:
2. W prawym pasku klawiszy stanu wybierz układ współrzędnych.3. Ustaw Hand-Override. 4. Wciśnij i przytrzymaj przycisk potwierdzający. 5. Przy pomocy SpaceMouse przesuń robota w żądanym kierunku.
6.6.8 Przyrostowy przesuw ręczny
Opis Przyrostowy przesuw ręczny umożliwia przesuwanie robota o określony dystans, np. o 10 mm lub 3°. Następnie robot samoczynnie zatrzymuje się.
Rys. 6-7: Okno opcji justowania SpaceMouse
Podczas przełączania na tryb Automatyka lub Automatyka Zewn. justowanie SpaceMouse jest automatycznie przywracane na 0°.
Można wyświetlić pozycję robota podczas przesuwania: Wybierz Widok > Pozycja rzeczywista.
47 / 12820.07.2006 KSS-AD-EA-5x pl
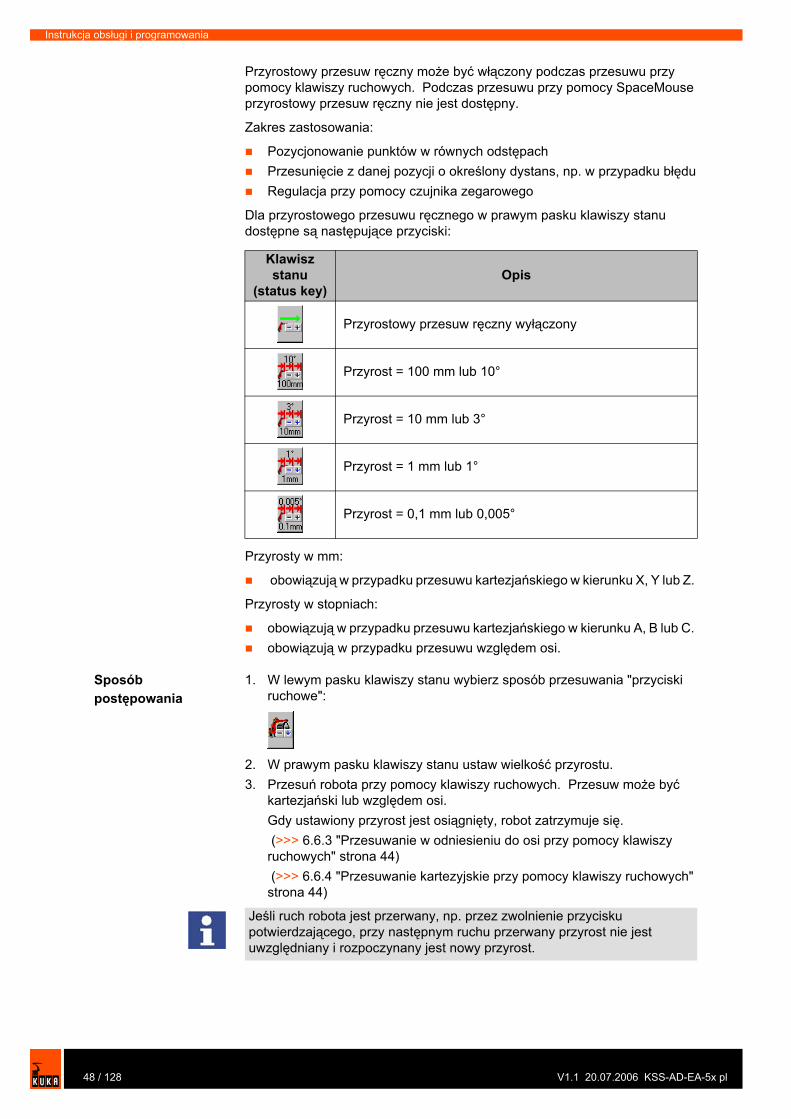
Instrukcja obsługi i programowania
Przyrostowy przesuw ręczny może być włączony podczas przesuwu przy pomocy klawiszy ruchowych. Podczas przesuwu przy pomocy SpaceMouse przyrostowy przesuw ręczny nie jest dostępny.
Zakres zastosowania:
Pozycjonowanie punktów w równych odstępachPrzesunięcie z danej pozycji o określony dystans, np. w przypadku błęduRegulacja przy pomocy czujnika zegarowego
Dla przyrostowego przesuwu ręcznego w prawym pasku klawiszy stanu dostępne są następujące przyciski:
Przyrosty w mm:
obowiązują w przypadku przesuwu kartezjańskiego w kierunku X, Y lub Z.
Przyrosty w stopniach:
obowiązują w przypadku przesuwu kartezjańskiego w kierunku A, B lub C. obowiązują w przypadku przesuwu względem osi.
Sposób postępowania
1. W lewym pasku klawiszy stanu wybierz sposób przesuwania "przyciski ruchowe":
2. W prawym pasku klawiszy stanu ustaw wielkość przyrostu. 3. Przesuń robota przy pomocy klawiszy ruchowych. Przesuw może być
kartezjański lub względem osi. Gdy ustawiony przyrost jest osiągnięty, robot zatrzymuje się. (>>> 6.6.3 "Przesuwanie w odniesieniu do osi przy pomocy klawiszy ruchowych" strona 44) (>>> 6.6.4 "Przesuwanie kartezyjskie przy pomocy klawiszy ruchowych" strona 44)
Klawisz stanu
(status key)Opis
Przyrostowy przesuw ręczny wyłączony
Przyrost = 100 mm lub 10°
Przyrost = 10 mm lub 3°
Przyrost = 1 mm lub 1°
Przyrost = 0,1 mm lub 0,005°
Jeśli ruch robota jest przerwany, np. przez zwolnienie przycisku potwierdzającego, przy następnym ruchu przerwany przyrost nie jest uwzględniany i rozpoczynany jest nowy przyrost.
48 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
6. Obsługa
6.7 Wyłączanie funkcji monitorowania zakresu roboczego
Opis Dla danego robota można definiować zakresy robocze. Zakresy robocze mają na celu ochronę urzędzenia.
Istnieją 2 rodzaje zakresów roboczych:
Zakres roboczy jest zakresem niedozwolonym. Robot może poruszać się wyłącznie poza zakresem roboczym. Tylko zakres roboczy jest zakresem dozwolonym. Robot nie może poruszać się poza zakresem roboczym.
Jeśli robot wchodzi w niedozwolony obszar, układ sterowania robota włącza uprzednio zdefiniowane wyjście.
Ponadto w zależności od definicji zakresu roboczego dostępna jest następująca reakcja: Robot zatrzymuje się i generowany jest komunikat o naruszeniu zakresu roboczego. W tym wypadku funkcja monitorowania zakresu roboczego musi zostać wyłączona. Dopiero wtedy można wycofać robota z niedozwolonego zakresu.
Wymagania Grupa użytkowników EkspertTryb pracy T1 lub T2
Sposób postępowania
1. Wybierz Konfiguracja > Narzędzia > Monitorowanie zakresu roboczego > Monit. zakresu rob. off.
2. Wycofaj robota ręcznie z niedozwolonego zakresu. Gdy robot opuści niedozwolony zakres, funkcja monitorowania zakresu roboczego automatycznie włącza się ponownie.
6.8 Funkcje wyświetlania
6.8.1 Przegląd funkcji wyświetlania
W KSS dostępne są następujące funkcje wyświetlania:
Temat Funkcje wyświetlaniaAktualna pozycja robota (>>> 6.8.2 "Wyświetlanie pozycji
rzeczywistej" strona 50)Wejścia-wyjścia (>>> 6.8.4 "Wyświetlanie
analogowych wejść/wyjść" strona 51)
(>>> 6.8.3 "Wyświetlanie cyfrowych wejść/wyjść" strona 50)
(>>> 6.8.5 "Wyświetlanie wejść/wyjść dla automatyki zewnętrznej" strona 52)
Interrupty (>>> 6.8.6 "Wyświetlanie interruptów" strona 54)
Informacje o systemie robota (>>> 6.8.7 "Wyświetlanie informacji o systemie robota" strona 55)
(>>> 6.8.8 "Wyświetlanie danych robota" strona 56)
Informacje o sprzęcie (>>> 6.8.9 "Wyświetlanie informacji o sprzęcie" strona 56)
49 / 12820.07.2006 KSS-AD-EA-5x pl
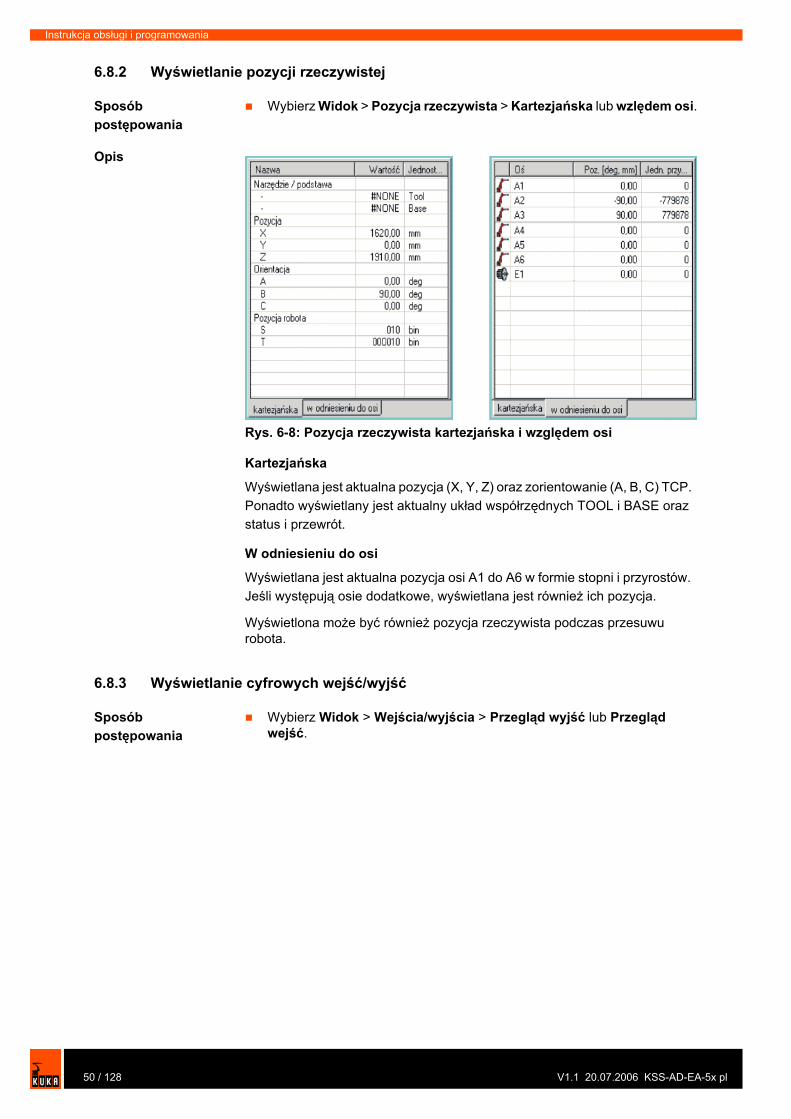
Instrukcja obsługi i programowania
6.8.2 Wyświetlanie pozycji rzeczywistej
Sposób postępowania
Wybierz Widok > Pozycja rzeczywista > Kartezjańska lub wzlędem osi.
Opis
Kartezjańska
Wyświetlana jest aktualna pozycja (X, Y, Z) oraz zorientowanie (A, B, C) TCP. Ponadto wyświetlany jest aktualny układ współrzędnych TOOL i BASE oraz status i przewrót.
W odniesieniu do osi
Wyświetlana jest aktualna pozycja osi A1 do A6 w formie stopni i przyrostów. Jeśli występują osie dodatkowe, wyświetlana jest również ich pozycja.
Wyświetlona może być również pozycja rzeczywista podczas przesuwu robota.
6.8.3 Wyświetlanie cyfrowych wejść/wyjść
Sposób postępowania
Wybierz Widok > Wejścia/wyjścia > Przegląd wyjść lub Przegląd wejść.
Rys. 6-8: Pozycja rzeczywista kartezjańska i względem osi
50 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
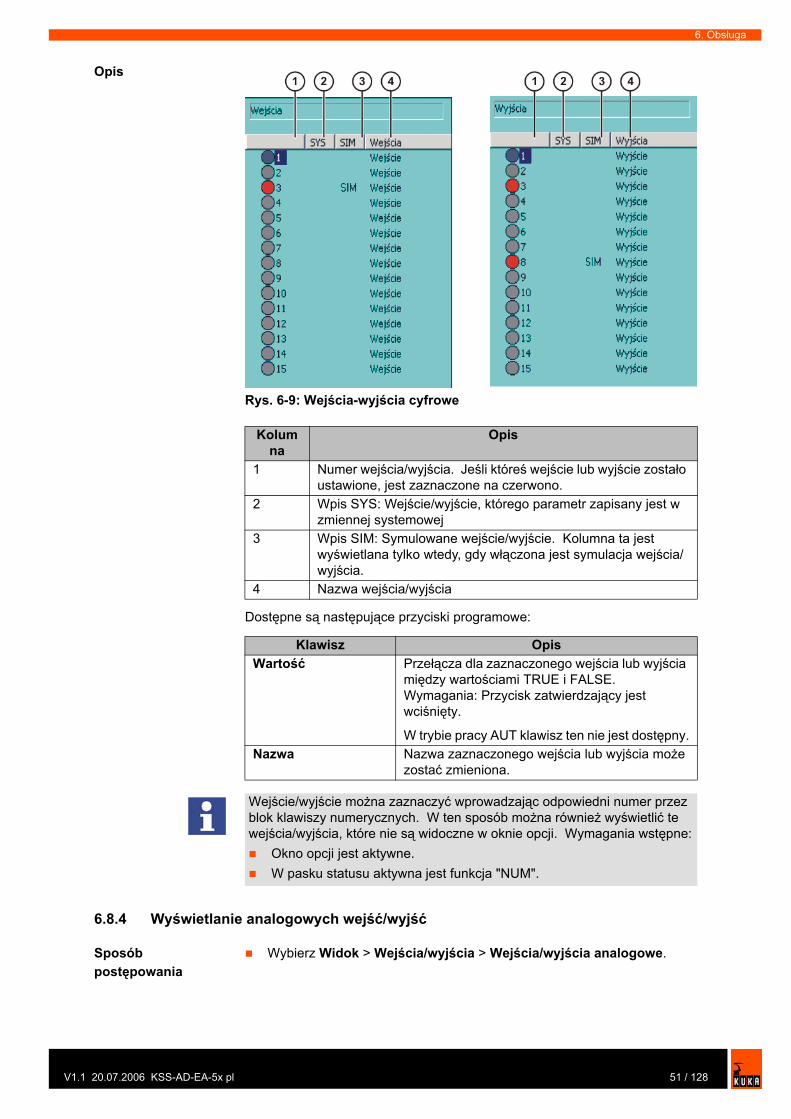
V1.1
6. Obsługa
Opis
Dostępne są następujące przyciski programowe:
6.8.4 Wyświetlanie analogowych wejść/wyjść
Sposób postępowania
Wybierz Widok > Wejścia/wyjścia > Wejścia/wyjścia analogowe.
Rys. 6-9: Wejścia-wyjścia cyfrowe
Kolumna
Opis
1 Numer wejścia/wyjścia. Jeśli któreś wejście lub wyjście zostało ustawione, jest zaznaczone na czerwono.
2 Wpis SYS: Wejście/wyjście, którego parametr zapisany jest w zmiennej systemowej
3 Wpis SIM: Symulowane wejście/wyjście. Kolumna ta jest wyświetlana tylko wtedy, gdy włączona jest symulacja wejścia/wyjścia.
4 Nazwa wejścia/wyjścia
Klawisz OpisWartość Przełącza dla zaznaczonego wejścia lub wyjścia
między wartościami TRUE i FALSE. Wymagania: Przycisk zatwierdzający jest wciśnięty.
W trybie pracy AUT klawisz ten nie jest dostępny.Nazwa Nazwa zaznaczonego wejścia lub wyjścia może
zostać zmieniona.
Wejście/wyjście można zaznaczyć wprowadzając odpowiedni numer przez blok klawiszy numerycznych. W ten sposób można również wyświetlić te wejścia/wyjścia, które nie są widoczne w oknie opcji. Wymagania wstępne:
Okno opcji jest aktywne. W pasku statusu aktywna jest funkcja "NUM".
51 / 12820.07.2006 KSS-AD-EA-5x pl
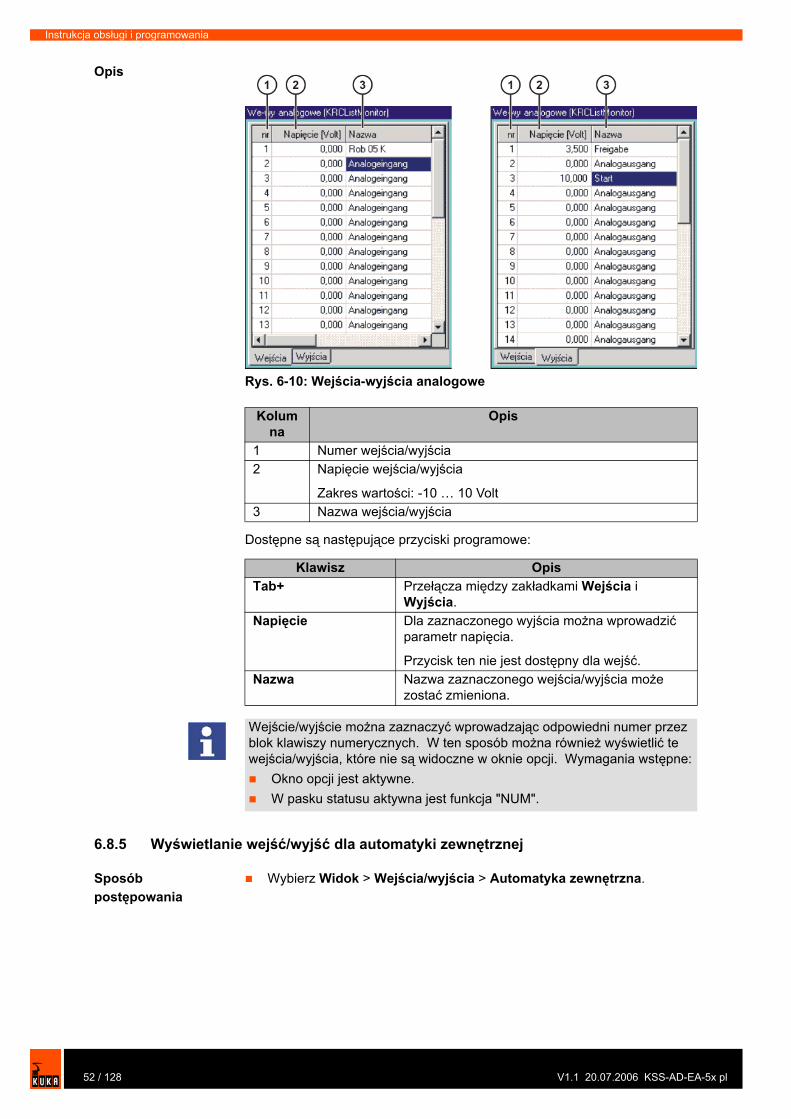
Instrukcja obsługi i programowania
Opis
Dostępne są następujące przyciski programowe:
6.8.5 Wyświetlanie wejść/wyjść dla automatyki zewnętrznej
Sposób postępowania
Wybierz Widok > Wejścia/wyjścia > Automatyka zewnętrzna.
Rys. 6-10: Wejścia-wyjścia analogowe
Kolumna
Opis
1 Numer wejścia/wyjścia2 Napięcie wejścia/wyjścia
Zakres wartości: -10 … 10 Volt3 Nazwa wejścia/wyjścia
Klawisz OpisTab+ Przełącza między zakładkami Wejścia i
Wyjścia.Napięcie Dla zaznaczonego wyjścia można wprowadzić
parametr napięcia.
Przycisk ten nie jest dostępny dla wejść. Nazwa Nazwa zaznaczonego wejścia/wyjścia może
zostać zmieniona.
Wejście/wyjście można zaznaczyć wprowadzając odpowiedni numer przez blok klawiszy numerycznych. W ten sposób można również wyświetlić te wejścia/wyjścia, które nie są widoczne w oknie opcji. Wymagania wstępne:
Okno opcji jest aktywne. W pasku statusu aktywna jest funkcja "NUM".
52 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
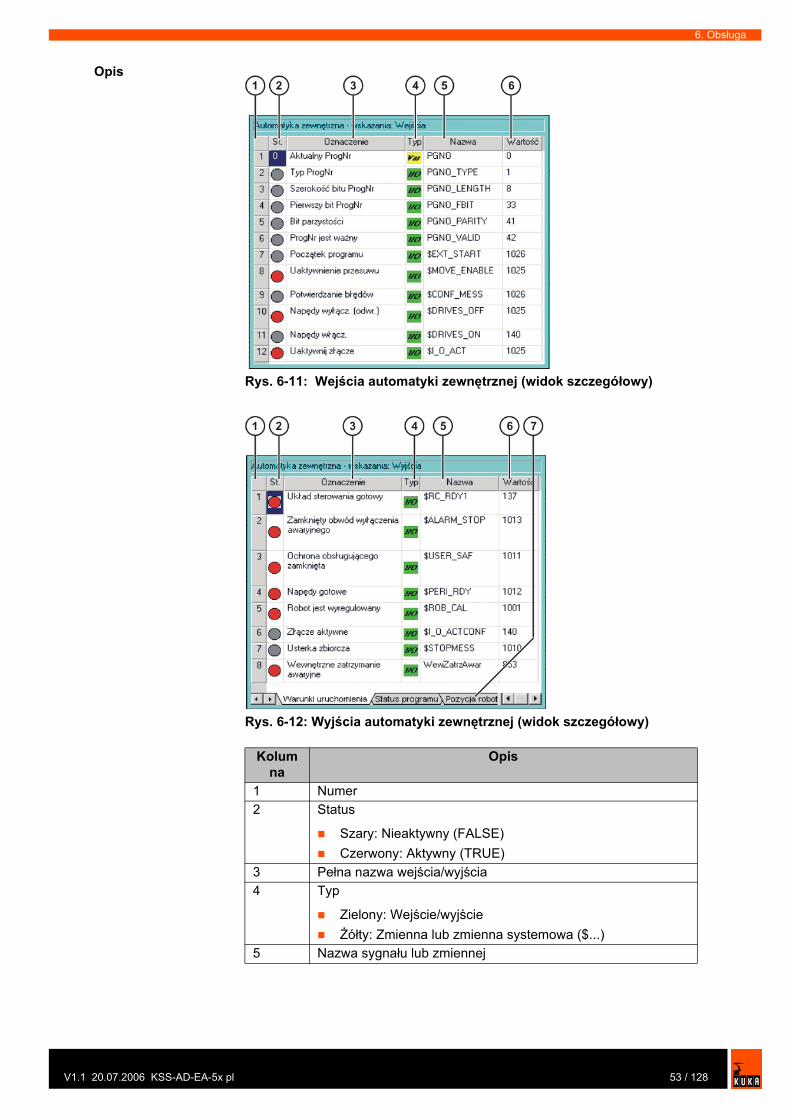
V1.1
6. Obsługa
Opis
Rys. 6-11: Wejścia automatyki zewnętrznej (widok szczegółowy)
Rys. 6-12: Wyjścia automatyki zewnętrznej (widok szczegółowy)
Kolumna
Opis
1 Numer2 Status
Szary: Nieaktywny (FALSE)Czerwony: Aktywny (TRUE)
3 Pełna nazwa wejścia/wyjścia 4 Typ
Zielony: Wejście/wyjścieŻółty: Zmienna lub zmienna systemowa ($...)
5 Nazwa sygnału lub zmiennej
53 / 12820.07.2006 KSS-AD-EA-5x pl
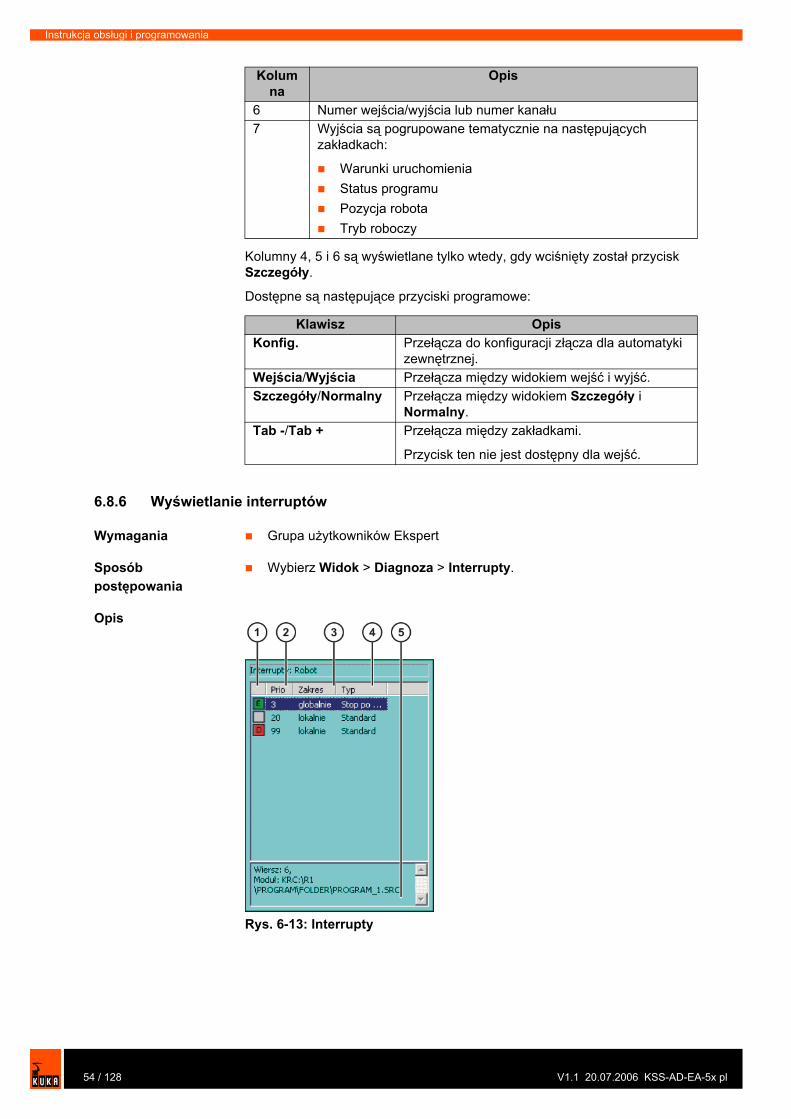
Instrukcja obsługi i programowania
Kolumny 4, 5 i 6 są wyświetlane tylko wtedy, gdy wciśnięty został przycisk Szczegóły.
Dostępne są następujące przyciski programowe:
6.8.6 Wyświetlanie interruptów
Wymagania Grupa użytkowników Ekspert
Sposób postępowania
Wybierz Widok > Diagnoza > Interrupty.
Opis
6 Numer wejścia/wyjścia lub numer kanału7 Wyjścia są pogrupowane tematycznie na następujących
zakładkach:
Warunki uruchomieniaStatus programuPozycja robotaTryb roboczy
Klawisz OpisKonfig. Przełącza do konfiguracji złącza dla automatyki
zewnętrznej. Wejścia/Wyjścia Przełącza między widokiem wejść i wyjść. Szczegóły/Normalny Przełącza między widokiem Szczegóły i
Normalny. Tab -/Tab + Przełącza między zakładkami.
Przycisk ten nie jest dostępny dla wejść.
Kolumna
Opis
Rys. 6-13: Interrupty
54 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
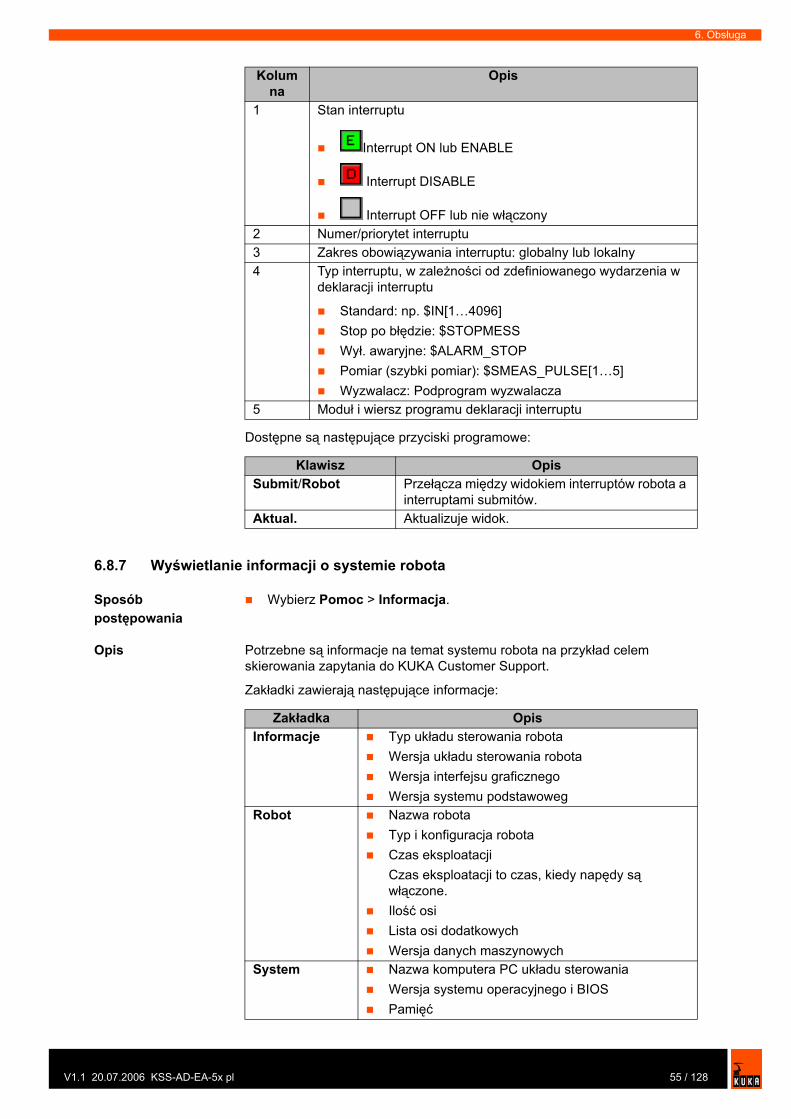
V1.1
6. Obsługa
Dostępne są następujące przyciski programowe:
6.8.7 Wyświetlanie informacji o systemie robota
Sposób postępowania
Wybierz Pomoc > Informacja.
Opis Potrzebne są informacje na temat systemu robota na przykład celem skierowania zapytania do KUKA Customer Support.
Zakładki zawierają następujące informacje:
Kolumna
Opis
1 Stan interruptu
Interrupt ON lub ENABLE
Interrupt DISABLE
Interrupt OFF lub nie włączony2 Numer/priorytet interruptu3 Zakres obowiązywania interruptu: globalny lub lokalny4 Typ interruptu, w zależności od zdefiniowanego wydarzenia w
deklaracji interruptu
Standard: np. $IN[1…4096]Stop po błędzie: $STOPMESSWył. awaryjne: $ALARM_STOPPomiar (szybki pomiar): $SMEAS_PULSE[1…5]Wyzwalacz: Podprogram wyzwalacza
5 Moduł i wiersz programu deklaracji interruptu
Klawisz OpisSubmit/Robot Przełącza między widokiem interruptów robota a
interruptami submitów. Aktual. Aktualizuje widok.
Zakładka OpisInformacje Typ układu sterowania robota
Wersja układu sterowania robotaWersja interfejsu graficznegoWersja systemu podstawoweg
Robot Nazwa robotaTyp i konfiguracja robotaCzas eksploatacjiCzas eksploatacji to czas, kiedy napędy są włączone. Ilość osi Lista osi dodatkowychWersja danych maszynowych
System Nazwa komputera PC układu sterowaniaWersja systemu operacyjnego i BIOSPamięć
55 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
6.8.8 Wyświetlanie danych robota
Sposób postępowania
1. Wybierz Uruchom > Dane robota.2. Wyświetlane są następujące dane:
Nazwa robotaNazwa robota może zostać zmieniona. Numer seryjnyCzas eksploatacjiCzas eksploatacji to czas, kiedy napędy są włączone. Dane maszynowe
6.8.9 Wyświetlanie informacji o sprzęcie
Sposób postępowania
1. Wybierz Wskazanie > Informacja o sprzęcie.2. W lewej części okna rozwiń drzewko i zaznacz pożądane urządzenia.
W prawej części okna wyświetlane są informacje o zaznaczonym urządzeniu.
Opis Dostępne są następujące przyciski programowe:
6.9 Archiwizowanie
6.9.1 Formatowanie dyskietki
Sposób postępowania
1. Włóż dyskietkę do napędu. 2. Wybierz Plik > Formatuj dyskietkę.3. Potwierdź wciskając Tak.
Po ukończeniu archiwizacji wyświetlony zostanie komunikat.
Opcje Dodatkowo zainstalowane opcje i pakiety technologiczne
Komentarze Dodatkowe komentarzeModuły Nazwa i wersja ważnych plików systemowych
Przycisk Zapisz eksportuje zawartość zakładki Moduły do pliku C:\ KRC\ ROBOTER\ LOG\ OCXVER.TXT.
Skaner antywirusowy
Nazwa i wersja zainstalowanych plików skanera antywirusowego
Przycisk Zapisz eksportuje zawartość zakładki Skaner antywirusowy do pliku C:\ KRC\ ROBOTER\ LOG\ VIRUS-INFO.XML.
Zakładka Opis
Klawisz OpisŁaduj konfig. Ładuje ostatnio zapamiętaną konfigurację. Uaktualnij Aktualizuje widok.Eksportuj Eksportuje informacje o sprzęcie do pliku w
formacie XML.
56 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
6. Obsługa
6.9.2 Archiwizacja danych
Przygotowanie Przy większej objętości danych potrzebnych jest kilka dyskietek.
W razie potrzeby: sformatuj dyskietkę. (>>> 6.9.1 "Formatowanie dyskietki" strona 56)
Postępowanie 1. Włóż dyskietkę do stacji dyskietek.2. Wybierz menu w kolejności Plik > Archiwizuj, a następnie wybierz
wymagany punkt menu.3. Potwierdź zapytanie systemu wskazując na Tak.
Komunikat informuje o zakończeniu archiwizacji lub konieczności zastosowania następnej dyskietki. Standardowo zostaje utworzony plik ARCHIVE.ZIP.
Opis Przy archiwizacji można wybrać poniższe punkty menu. Które pliki dokładnie będą archiwizowane, zależy od konfiguracji.
Jeżeli istnieje już archiwum, sterownik robota porównuje nazwę tego robota z nazwą archiwum. Jeśli nazwy te nie są takie same, system wyświetla zapytanie.
Konfiguracja archiwizacji możliwa jest w karcie rejestracyjnej konfiguratora KC C Archive Manager. Dotyczy to następujących ustawień:
Ścieżka dla archiwizacjiDokładne pliki, które są archiwizowane pod każdym z punktów menuInne ustawienia
Uwaga!Dyskietkę można wyjąć z napędu dopiero wtedy, gdy zgaśnie lampka oznaczająca działanie napędu. W przeciwnym razie można uszkodzić napęd lub dyskietkę.
Punkt menu OpisWszystko Archiwizowane są pliki niezbędne do przywrócenia
istniejącego systemu.Aplikacje Archiwizowane są wszystkie zdefiniowane przez
użytkownika moduły KRL oraz przynależne pliki systemowe.
Dane maszynowe
Archiwizowane są dane maszynowe.
Konfiguracja > Sterownik
Archiwizowane są sterowniki wejść/wyjść.
Nie jest dostępny w grupie Użytkownik.Konfiguracja > Teksty długie we-wy
Archiwizowane są oznaczenia tekstowe wejść i wyjść.
Nie jest dostępny w grupie Użytkownik.
Konfiguracja > KUKA TechPack
Archiwizowana jest konfiguracja zainstalowaych pakietów technologicznych.
Nie jest dostępny w grupie Użytkownik.Log danych Archiwizowane są pliki log.Aktualny wybór Archiwizowane są pliki zaznaczone w nawigatorze.
Możliwa jest również archiwizacja pod ścieżką dostępu do sieci. Wymaganą ścieżkę można ustawić w konfiguratorze KC.
57 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
6.9.3 Przywracanie danych
Postępowanie 1. Włóż dyskietkę z archiwizowanymi danymi do stacji dyskietek.2. Wybierz menu w kolejności Plik > Przywróć, a następnie wybierz
wymagany punkt menu.3. Potwierdź zapytanie systemu wskazując na Tak.
Wyświetlany komunikat informuje o zakończeniu procesu przywracania danych.
4. Jeżeli dokonano archiwizacji na kilku dyskietkach, włóż następną dyskietkę i powtórz kroki 2. do 3.
5. Wyjmij dyskietkę ze stacji dyskietek i uruchom ponownie system.
Opis Przy przywracaniu danych istnieje możliwość wyboru takich samych punktów menu jak przy archiwizacji, z wyjątkiem punktu Log danych (>>> 6.9.2 "Archiwizacja danych" strona 57).
Jeżeli wersja plików archiwum nie jest zgodna z wersją plików systemowych, pojawia się komunikat o błędzie.
Jeżeli dane archiwizowano na dysku sieciowym, układ sterowania przy przywracaniu danych sięga na ten dysk.0
Sterownik robota nie rozpoznaje, czy dokonano archiwizacji na kilku dyskietkach. Dlatego użytkownik nie jest informowany o konieczności włożenia następnych dyskietek; musi on pamiętać o tym sam. Kolejność wkładania dyskietek nie jest istotna.
58 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
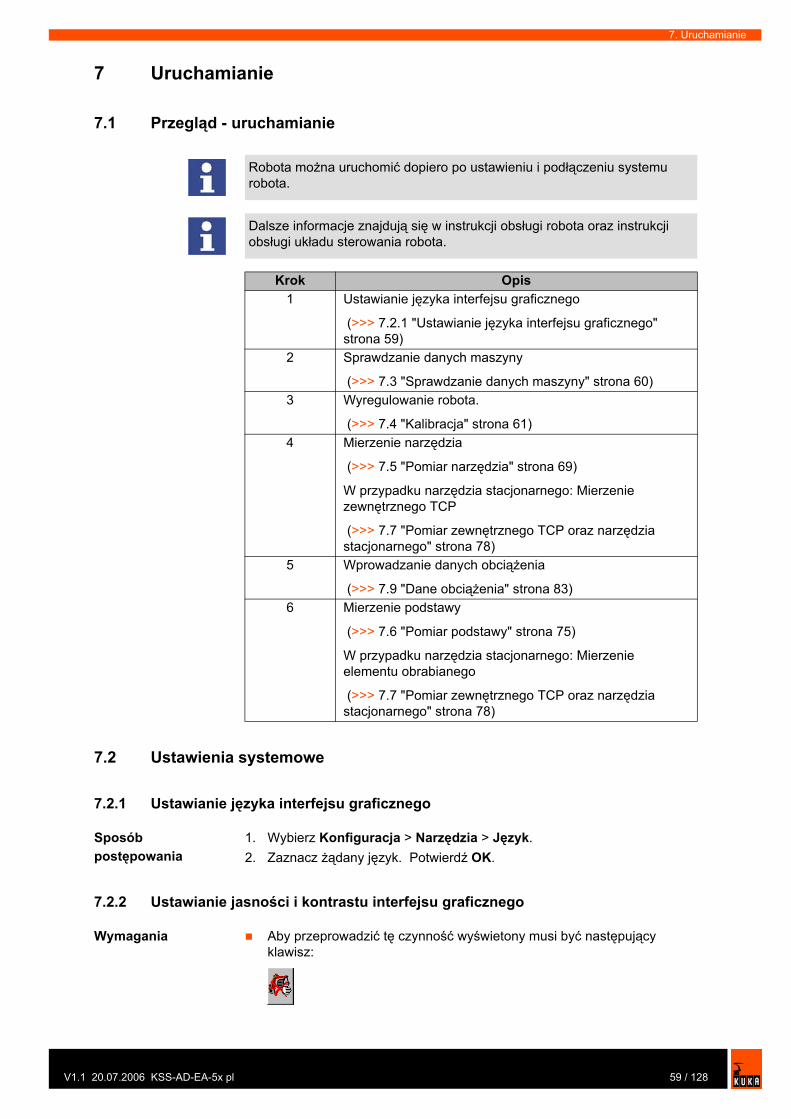
V1.1
7. Uruchamianie
7 Uruchamianie
7.1 Przegląd - uruchamianie
7.2 Ustawienia systemowe
7.2.1 Ustawianie języka interfejsu graficznego
Sposób postępowania
1. Wybierz Konfiguracja > Narzędzia > Język.2. Zaznacz żądany język. Potwierdź OK.
7.2.2 Ustawianie jasności i kontrastu interfejsu graficznego
Wymagania Aby przeprowadzić tę czynność wyświetony musi być następujący klawisz:
Robota można uruchomić dopiero po ustawieniu i podłączeniu systemu robota.
Dalsze informacje znajdują się w instrukcji obsługi robota oraz instrukcji obsługi układu sterowania robota.
Krok Opis1 Ustawianie języka interfejsu graficznego
(>>> 7.2.1 "Ustawianie języka interfejsu graficznego" strona 59)
2 Sprawdzanie danych maszyny
(>>> 7.3 "Sprawdzanie danych maszyny" strona 60)3 Wyregulowanie robota.
(>>> 7.4 "Kalibracja" strona 61)4 Mierzenie narzędzia
(>>> 7.5 "Pomiar narzędzia" strona 69)
W przypadku narzędzia stacjonarnego: Mierzenie zewnętrznego TCP
(>>> 7.7 "Pomiar zewnętrznego TCP oraz narzędzia stacjonarnego" strona 78)
5 Wprowadzanie danych obciążenia
(>>> 7.9 "Dane obciążenia" strona 83)6 Mierzenie podstawy
(>>> 7.6 "Pomiar podstawy" strona 75)
W przypadku narzędzia stacjonarnego: Mierzenie elementu obrabianego
(>>> 7.7 "Pomiar zewnętrznego TCP oraz narzędzia stacjonarnego" strona 78)
59 / 12820.07.2006 KSS-AD-EA-5x pl
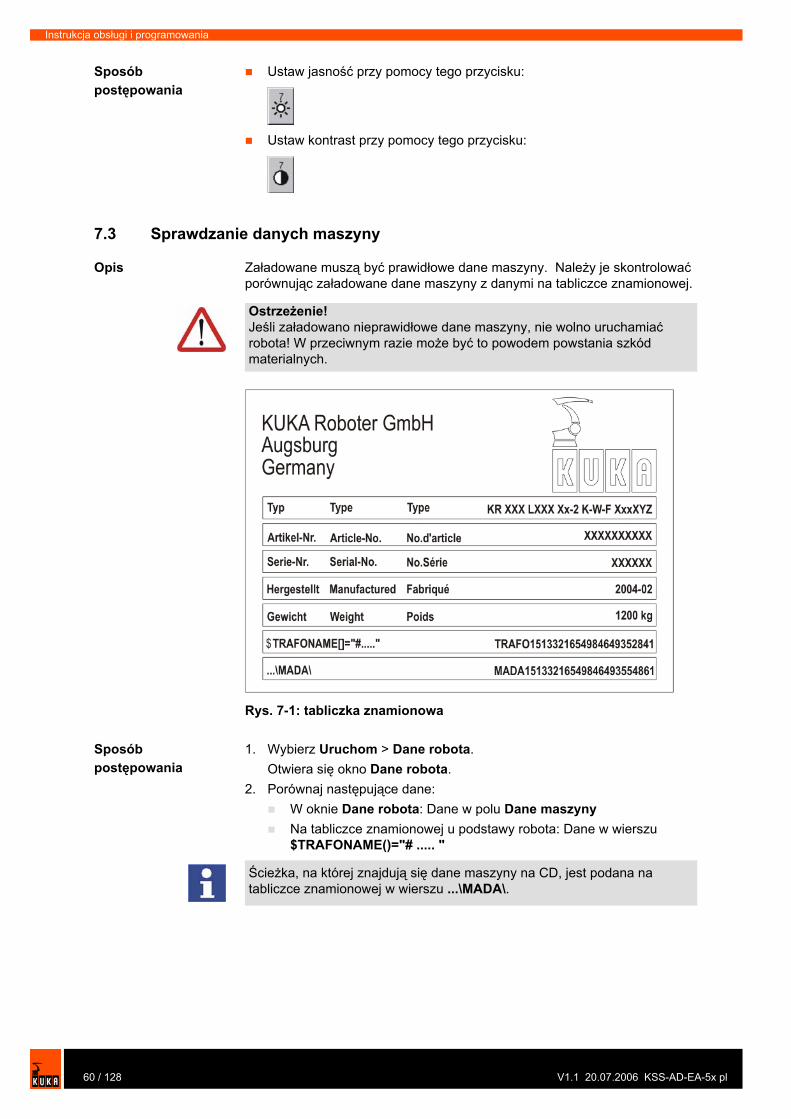
Instrukcja obsługi i programowania
Sposób postępowania
Ustaw jasność przy pomocy tego przycisku:
Ustaw kontrast przy pomocy tego przycisku:
7.3 Sprawdzanie danych maszyny
Opis Załadowane muszą być prawidłowe dane maszyny. Należy je skontrolować porównując załadowane dane maszyny z danymi na tabliczce znamionowej.
Sposób postępowania
1. Wybierz Uruchom > Dane robota. Otwiera się okno Dane robota.
2. Porównaj następujące dane:W oknie Dane robota: Dane w polu Dane maszynyNa tabliczce znamionowej u podstawy robota: Dane w wierszu $TRAFONAME()="# ..... "
Ostrzeżenie!Jeśli załadowano nieprawidłowe dane maszyny, nie wolno uruchamiać robota! W przeciwnym razie może być to powodem powstania szkód materialnych.
Rys. 7-1: tabliczka znamionowa
Ścieżka, na której znajdują się dane maszyny na CD, jest podana na tabliczce znamionowej w wierszu ...\MADA\.
60 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
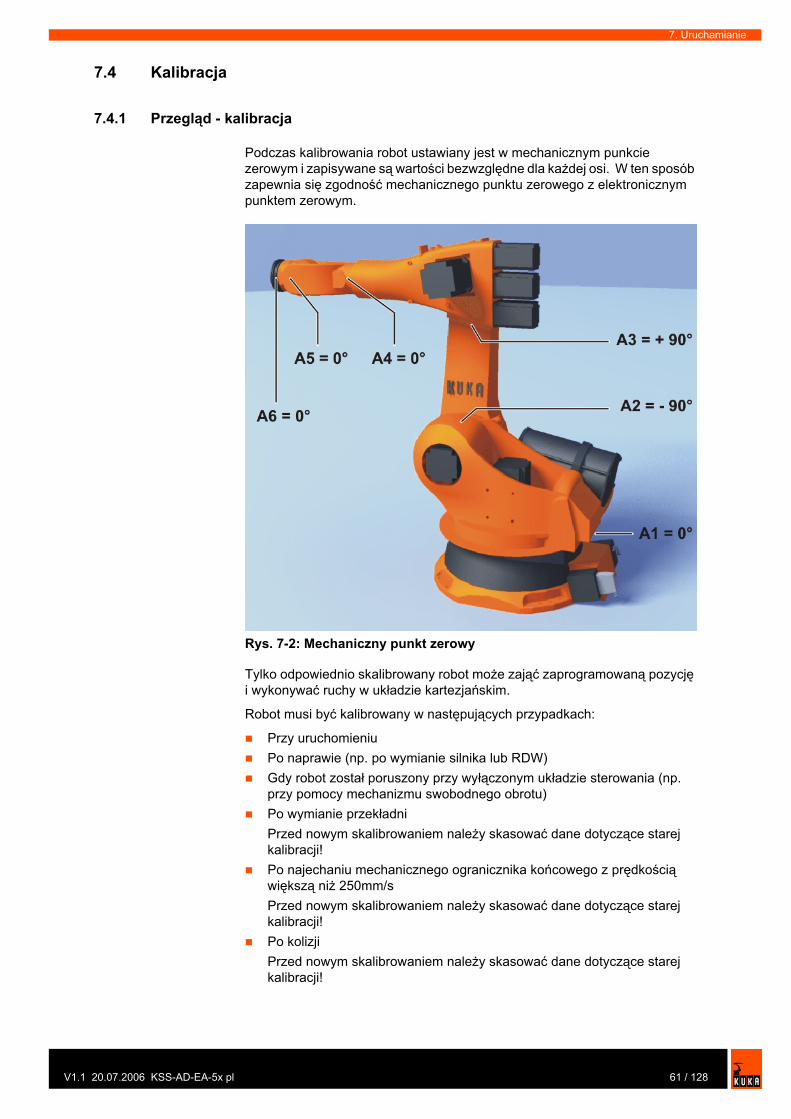
V1.1
7. Uruchamianie
7.4 Kalibracja
7.4.1 Przegląd - kalibracja
Podczas kalibrowania robot ustawiany jest w mechanicznym punkcie zerowym i zapisywane są wartości bezwzględne dla każdej osi. W ten sposób zapewnia się zgodność mechanicznego punktu zerowego z elektronicznym punktem zerowym.
Tylko odpowiednio skalibrowany robot może zająć zaprogramowaną pozycję i wykonywać ruchy w układzie kartezjańskim.
Robot musi być kalibrowany w następujących przypadkach:
Przy uruchomieniuPo naprawie (np. po wymianie silnika lub RDW)Gdy robot został poruszony przy wyłączonym układzie sterowania (np. przy pomocy mechanizmu swobodnego obrotu)Po wymianie przekładniPrzed nowym skalibrowaniem należy skasować dane dotyczące starej kalibracji!Po najechaniu mechanicznego ogranicznika końcowego z prędkością większą niż 250mm/sPrzed nowym skalibrowaniem należy skasować dane dotyczące starej kalibracji!Po kolizjiPrzed nowym skalibrowaniem należy skasować dane dotyczące starej kalibracji!
Rys. 7-2: Mechaniczny punkt zerowy
61 / 12820.07.2006 KSS-AD-EA-5x pl
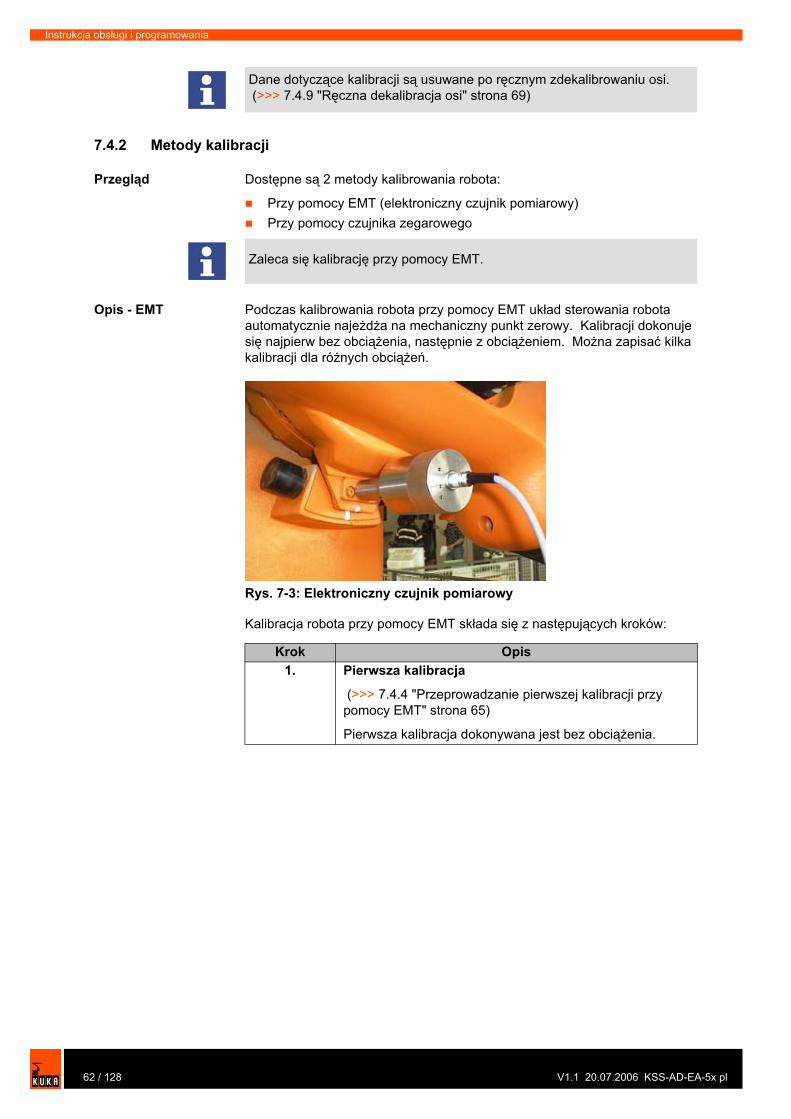
Instrukcja obsługi i programowania
7.4.2 Metody kalibracji
Przegląd Dostępne są 2 metody kalibrowania robota:
Przy pomocy EMT (elektroniczny czujnik pomiarowy)Przy pomocy czujnika zegarowego
Opis - EMT Podczas kalibrowania robota przy pomocy EMT układ sterowania robota automatycznie najeżdża na mechaniczny punkt zerowy. Kalibracji dokonuje się najpierw bez obciążenia, następnie z obciążeniem. Można zapisać kilka kalibracji dla różnych obciążeń.
Kalibracja robota przy pomocy EMT składa się z następujących kroków:
Dane dotyczące kalibracji są usuwane po ręcznym zdekalibrowaniu osi. (>>> 7.4.9 "Ręczna dekalibracja osi" strona 69)
Zaleca się kalibrację przy pomocy EMT.
Rys. 7-3: Elektroniczny czujnik pomiarowy
Krok Opis1. Pierwsza kalibracja
(>>> 7.4.4 "Przeprowadzanie pierwszej kalibracji przy pomocy EMT" strona 65)
Pierwsza kalibracja dokonywana jest bez obciążenia.
62 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
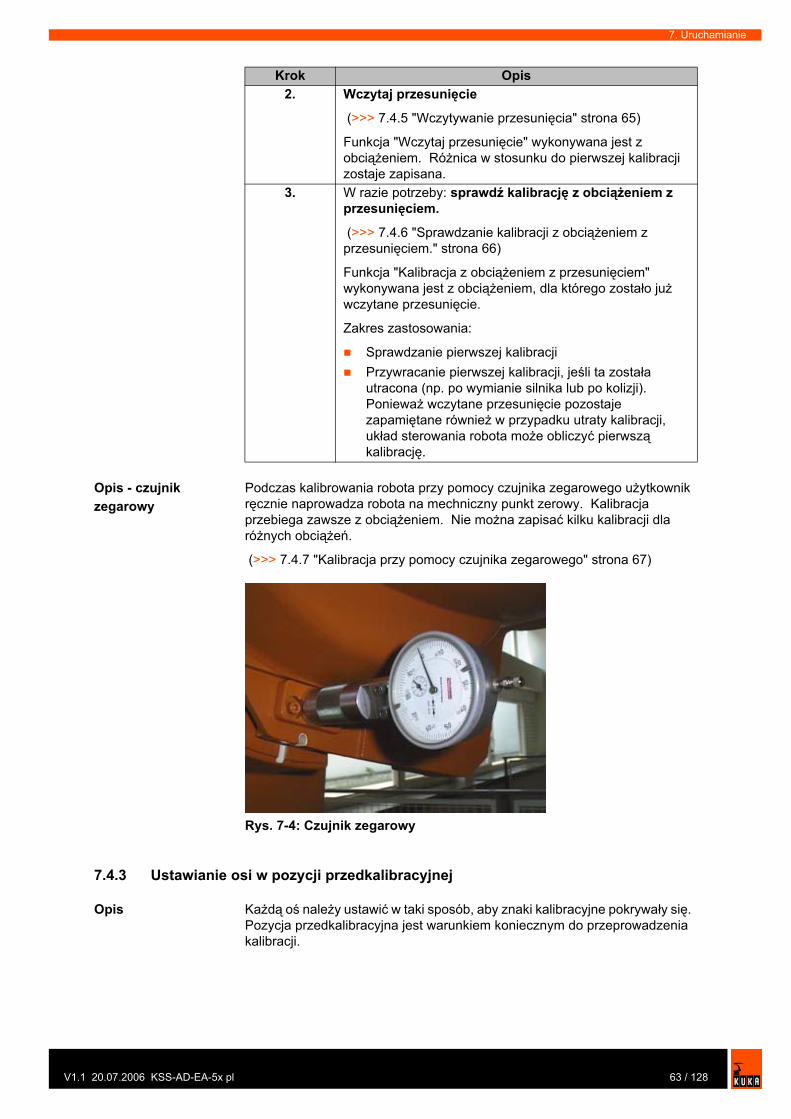
V1.1
7. Uruchamianie
Opis - czujnik zegarowy
Podczas kalibrowania robota przy pomocy czujnika zegarowego użytkownik ręcznie naprowadza robota na mechniczny punkt zerowy. Kalibracja przebiega zawsze z obciążeniem. Nie można zapisać kilku kalibracji dla różnych obciążeń.
(>>> 7.4.7 "Kalibracja przy pomocy czujnika zegarowego" strona 67)
7.4.3 Ustawianie osi w pozycji przedkalibracyjnej
Opis Każdą oś należy ustawić w taki sposób, aby znaki kalibracyjne pokrywały się. Pozycja przedkalibracyjna jest warunkiem koniecznym do przeprowadzenia kalibracji.
2. Wczytaj przesunięcie
(>>> 7.4.5 "Wczytywanie przesunięcia" strona 65)
Funkcja "Wczytaj przesunięcie" wykonywana jest z obciążeniem. Różnica w stosunku do pierwszej kalibracji zostaje zapisana.
3. W razie potrzeby: sprawdź kalibrację z obciążeniem z przesunięciem.
(>>> 7.4.6 "Sprawdzanie kalibracji z obciążeniem z przesunięciem." strona 66)
Funkcja "Kalibracja z obciążeniem z przesunięciem" wykonywana jest z obciążeniem, dla którego zostało już wczytane przesunięcie.
Zakres zastosowania:
Sprawdzanie pierwszej kalibracjiPrzywracanie pierwszej kalibracji, jeśli ta została utracona (np. po wymianie silnika lub po kolizji). Ponieważ wczytane przesunięcie pozostaje zapamiętane również w przypadku utraty kalibracji, układ sterowania robota może obliczyć pierwszą kalibrację.
Krok Opis
Rys. 7-4: Czujnik zegarowy
63 / 12820.07.2006 KSS-AD-EA-5x pl
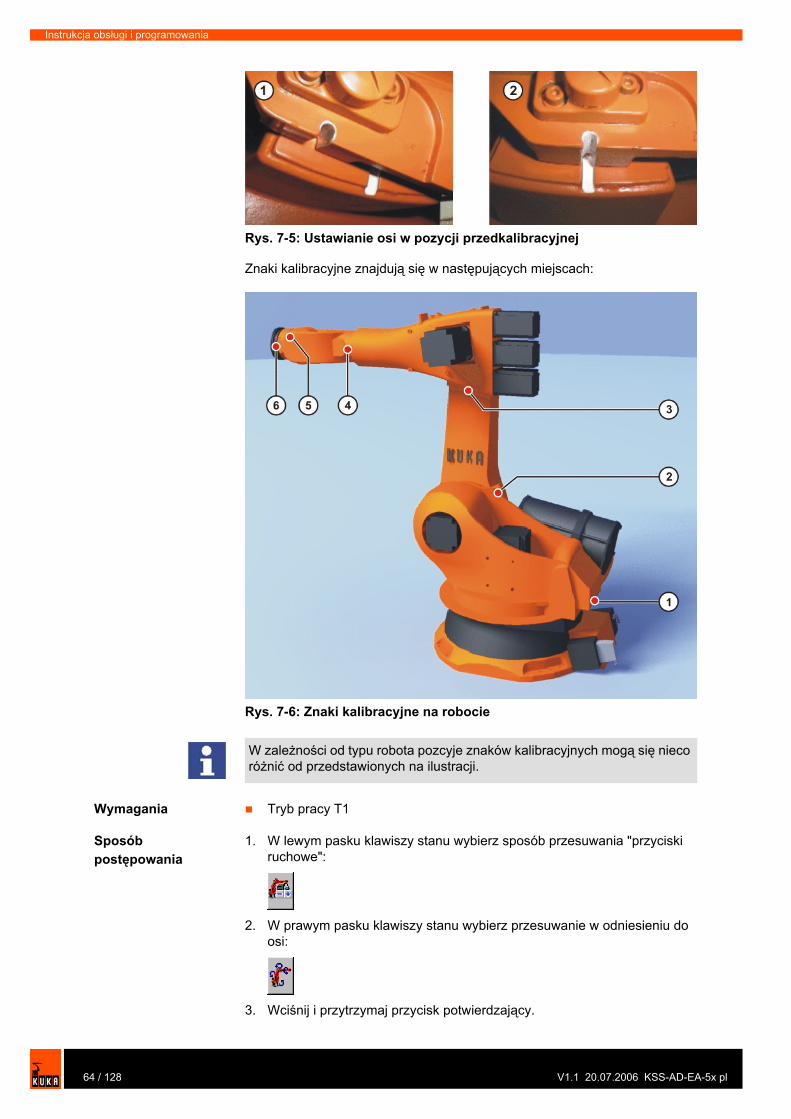
Instrukcja obsługi i programowania
Znaki kalibracyjne znajdują się w następujących miejscach:
Wymagania Tryb pracy T1
Sposób postępowania
1. W lewym pasku klawiszy stanu wybierz sposób przesuwania "przyciski ruchowe":
2. W prawym pasku klawiszy stanu wybierz przesuwanie w odniesieniu do osi:
3. Wciśnij i przytrzymaj przycisk potwierdzający.
Rys. 7-5: Ustawianie osi w pozycji przedkalibracyjnej
Rys. 7-6: Znaki kalibracyjne na robocie
W zależności od typu robota pozcyje znaków kalibracyjnych mogą się nieco różnić od przedstawionych na ilustracji.
64 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
7. Uruchamianie
4. W prawym pasku klawiszy stanu wyświetlone są osie 1 do 6. Przyciskając klawisz plus lub minus poruszaj daną osią w kierunku dodatnim lub ujemnym.
5. Poczynając od osi 1 ustaw po kolei osie w taki sposób, aby znaki kalibracyjne pokrywały się.
7.4.4 Przeprowadzanie pierwszej kalibracji przy pomocy EMT
Wymagania Robot jest bez obciążenia. Oznacza to, że nie jest na nim zamontowane żadne narzędzie, element obrabiany lub inne dodatkowe obciążenie. Wszystkie osie znajdują się w pozycji przedkalibracyjnej.
Nie wybrano żadnego programu.Tryb pracy T1
Sposób postępowania
1. Wybierz Uruchom >Reguluj > EMT > Z korektą obciążenia > Pierwsza regulacja.Otwiera się okno opcji. Wyświetlone są wszystkie osie przeznaczone do kalibrowania. Oś o najniższym numerze jest zaznaczona.
2. Na osi, która jest zaznaczona w oknie opcji, usuń nasadkę ochronną z wypustu pomiarowego. Przykręć EMT do wypustu. Następnie podłącz przewód pomiarowy do EMT i przyłącza X32 w skrzynce przyłączy stelaża podstawowego.
3. Wciśnij przycisk Kalibruj.4. Wciśnij przycisk zatwierdzający i przycisk Start.
Jeśli EMT rozpoznał najgłębszy punkt wypustu pomiarowego, to osiągnięto mechaniczne położenie zerowe. Robot zatrzymuje się automatycznie. Uzyskane wartości są zachowywane. Oś znika z okna opcji.
5. Usuń przewód pomiarowy z EMT. Następnie usuń EMT z wypustu pomiarowego i załóż nasadkę ochronną.
6. Powtórz kroki 2 do 5 dla wszystkich osi przeznaczonych do kalibracji.
7.4.5 Wczytywanie przesunięcia
Opis Funkcja "Wczytaj przesunięcie" wykonywana jest z obciążeniem. Różnica w stosunku do pierwszej kalibracji zostaje zapisana.
Osie A4 i A6 przesuń w taki sposób w pozycję przedkalibracyjną, aby zajęły w przybliżeniu następujące pozycje:
A4: 0°A6: +90°
A4 i A6 osiągają w ten sposób podczas kalibracji prawidłowy mechaniczny punkt zerowy i nie są przekręcone. W celu skontrolowania pozycji osi podczas przesuwania wyświetl: Wybierz Widok > Pozycja rzeczywista > W odniesieniu do osi.
A4 i A6 nie mogą być przekręcone. (>>> 7.4.3 "Ustawianie osi w pozycji przedkalibracyjnej" strona 63)
Uwaga!EMT należy przykręcać do wypustu pomiarowego zawsze bez przewodu pomiarowego lub usunąć z wypustu. W przeciwnym razie przewód pomiarowy może ulec uszkodzeniu.
65 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Jeśli robot pracuje przy różnych obciążeniach, funkcja "Wczytaj przesunięcie" musi być wykonana dla każdego obciążenia.
Dla chwytaków przenoszących ciężkie elementy funkcja "Wczytaj przesunięcie" musi być każdorazowo wykonana dla chwytaka bez elementu i dla chwytaka z elementem.
Wymagania Identyczne warunki otoczenia (temperatura itd.) jak przy pierwszej kalibracjiObciążenie jest zamontowane na robocie. Wszystkie osie znajdują się w pozycji przedkalibracyjnej.
Nie wybrano żadnego programu.Tryb pracy T1
Sposób postępowania
1. Wybierz Kalibracja >EMT > Z korektą obciążenia > Wczytaj przesunięcie.
2. Podaj numer narzędzia. Potwierdź Narz. OK.Otwiera się okno opcji. Wszystkie osie, które jeszcze nie zostały wczytane dla danego narzędzia, są wyświetlone. Oś o najniższym numerze jest zaznaczona.
3. Na osi, która jest zaznaczona w oknie opcji, usuń nasadkę ochronną z wypustu pomiarowego. Przykręć EMT do wypustu. Następnie podłącz przewód pomiarowy do EMT i przyłącza X32 w skrzynce przyłączy stelaża podstawowego.
4. Wciśnij przycisk Wczytaj.5. Wciśnij przycisk zatwierdzający i przycisk Start.
Jeśli EMT rozpoznał najgłębszy punkt wypustu pomiarowego, to osiągnięto mechaniczne położenie zerowe. Robot zatrzymuje się automatycznie. Otwiera się okno opcji. Różnica dla tej osi w stosunku do pierwszej kalibracji jest podawana w formie przyrostu i stopniach.
6. Potwierdź OK. Oś znika z okna opcji. 7. Usuń przewód pomiarowy z EMT. Następnie usuń EMT z wypustu
pomiarowego i załóż nasadkę ochronną.8. Powtórz kroki 3 do 7 dla wszystkich osi przeznaczonych do kalibracji.
7.4.6 Sprawdzanie kalibracji z obciążeniem z przesunięciem.
Opis Zakres zastosowania:
Sprawdzanie pierwszej kalibracjiPrzywracanie pierwszej kalibracji, jeśli ta została utracona (np. po wymianie silnika lub po kolizji). Ponieważ wczytane przesunięcie pozostaje zapamiętane również w przypadku utraty kalibracji, układ sterowania robota może obliczyć pierwszą kalibrację.
A4 i A6 nie mogą być przekręcone. (>>> 7.4.3 "Ustawianie osi w pozycji przedkalibracyjnej" strona 63)
Uwaga!EMT należy przykręcać do wypustu pomiarowego zawsze bez przewodu pomiarowego lub usunąć z wypustu. W przeciwnym razie przewód pomiarowy może ulec uszkodzeniu.
Daną oś można skontrolować tylko wtedy, gdy wszystkie osie z niższymi numerami zostały już skalibrowane.
66 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
7. Uruchamianie
Wymagania Identyczne warunki otoczenia (temperatura itd.) jak przy pierwszej kalibracjiNa robocie zamontowane jest obciążenie, dla którego wykonano funkcję "Wczytaj przesunięcie". Wszystkie osie znajdują się w pozycji przedkalibracyjnej.
Nie wybrano żadnego programu.Tryb pracy T1
Sposób postępowania
1. Wybierz Kalibracja > EMT > Z korektą obciążenia > Ostatnia regulacja > Z przesunięciem.
2. Podaj numer narzędzia. Potwierdź Narz. OK.Otwiera się okno opcji. Wszystkie osie, dla których zostało już wczytane przesunięcie dla tego narzędzia, są wyświetlone. Oś o najniższym numerze jest zaznaczona.
3. Na osi, która jest zaznaczona w oknie opcji, usuń nasadkę ochronną z wypustu pomiarowego. Przykręć EMT do wypustu. Następnie podłącz przewód pomiarowy do EMT i przyłącza X32 w skrzynce przyłączy stelaża podstawowego.
4. Wciśnij przycisk Sprawdź.5. Wciśnij przycisk zatwierdzający i przycisk Start.
Jeśli EMT rozpoznał najgłębszy punkt wypustu pomiarowego, to osiągnięto mechaniczne położenie zerowe. Robot zatrzymuje się automatycznie. Wyświetlana jest różnica w stosunku do "Wczytaj przesunięcie".
6. W razie potrzeby zachowaj uzyskane wartości wciskając Zapisz. Stare wartości kalibracji zostają tym samym usunięte. Aby móc przywrócić utraconą pierwszą kalibrację, należy zawsze zachowywać uzyskane wartości.
7. Usuń przewód pomiarowy z EMT. Następnie usuń EMT z wypustu pomiarowego i załóż nasadkę ochronną.
8. Powtórz kroki 3 do 7 dla wszystkich osi przeznaczonych do kalibracji.
7.4.7 Kalibracja przy pomocy czujnika zegarowego
Opis Podczas kalibracji przy pomocy czujnika zegarowego należy zawsze kalibrować z użyciem obciążenia. Nie można zapisać kilku kalibracji dla różnych obciążeń.
Wymagania Obciążenie jest zamontowane na robocie. Wszystkie osie znajdują się w pozycji przedkalibracyjnej.
A4 i A6 nie mogą być przekręcone. (>>> 7.4.3 "Ustawianie osi w pozycji przedkalibracyjnej" strona 63)
Uwaga!EMT należy przykręcać do wypustu pomiarowego zawsze bez przewodu pomiarowego lub usunąć z wypustu. W przeciwnym razie przewód pomiarowy może ulec uszkodzeniu.
Osie A4, A5 i A6 są mechanicznie połączone. Oznacza to:Jeśli usunięte są parametry osi A4, usunięte są tym samym parametry dla osi A5 i A6. Jeśli usunięte są parametry osi A5, usunięte są tym samym parametry dla osi A6.
67 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Wybrano przesuw względem osi przy pomocy przycisków ruchowych. (>>> 6.6.3 "Przesuwanie w odniesieniu do osi przy pomocy klawiszy ruchowych" strona 44)Nie wybrano żadnego programu.Tryb pracy T1
Sposób postępowania
1. Wybierz Reguluj > Zegar.Otwiera się okno opcji. Wyświetlane są wszystkie nieskalibrowane osie. Zaznaczona oś musi być kalibrowana jako pierwsza.
2. Usuń nasadkę ochronną wypustu pomiarowego i umieść w nim czujnik zegarowy. Przy pomocy klucza imbusowego poluzuj śruby na szyjce czujnika. Obróć tarczę w taki sposób, abyś mógł ją łatwo obserwować. Wciśnij bolce czujnika do oporu. Przy pomocy klucza imbusowego przykręć z powrotem śruby na szyjce czujnika.
3. Zredukuj Hand-Override do 1%.4. Przesuń osi z "+" na "-". W najniższym miejscu karbu pomiarowego, który
jest sygnalizowany odwróceniem wskazówki, ustaw czujnik zegarowy na zero.Jeśli najniższe położenie zostało przypadkiem przekroczone, poruszaj osią tak długo, aż osiągnięte zostanie to położenie. Nie ma znaczenia, czy przesunięcie wykonywane będzie z "+" na "-" czy odwrotnie.
5. Przywróć oś do pozycji przedkalibracyjnej. 6. Przesuwaj oś z "+" do "-" aż do chwili, gdy wskazówka znajduje się 5 do
10 przedziałek skali przed punktem zerowym. 7. Przełącz na prawym pasku klawiszy stanu na przyrostowy przesuw
ręczny. 8. Przesuwaj oś z "+" na "-" aż osiągnięty zostanie punkt zerowy.
9. Wciśnij przycisk Reguluj. Skalibrowana oś znika z okna opcji.10. Usuń czujnik zegarowy z wypustu pomiarowego i załóż nasadkę
ochronną.11. Przełącz z powrotem z przyrostowego przesuwu ręcznego na normalny
tryb pracy. 12. Powtórz kroki 2 do 11 dla wszystkich osi przeznaczonych do kalibracji.
7.4.8 Zapisywanie kalibracji
Sposób postępowania
Wybierz Uruchom > Reguluj > Zabezpiecz aktualne dane.
Opis Zabezpiecz aktualne dane zapisuje na dysku wszystkie dane kalibracyjne.
W ten sposób zapobiega się utracie danych kalibracyjnych, gdy układ sterowania robota nie może być w sposób prawidłowy wyłączony, np. ze względu na usterkę akumulatroa.
A4 i A6 nie mogą być przekręcone. (>>> 7.4.3 "Ustawianie osi w pozycji przedkalibracyjnej" strona 63)
Jeśli punkt zerowy zostanie przekroczony: Powtórz kroki 5 do 8.
68 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
7. Uruchamianie
7.4.9 Ręczna dekalibracja osi
Opis Parametry kalibracyjne dla poszczególnych osi mogą zostać usunięte. Podczas dekalibracji osie robota nie poruszają się.
Wymagania Nie wybrano żadnego programu.
Sposób postępowania
1. Wybierz Uruchom > Deregulacja.2. Zaznacz oś przeznaczoną do dekalibracji. 3. Wciśnij przycisk Deregulacja. Dane kalibracyjne dla tej osi zostają
usunięte. 4. Powtórz kroki 2 do 3 dla wszystkich osi przeznaczonych do dekalibracji.
7.5 Pomiar narzędzia
Opis Podczas pomiaru narzędzia użytkownik przypisuje zamontowanemu na kołnierzu montażowym narzędziu kartezjański układ współrzędnych (układ TOOL).
Układ współrzędnych TOOL ma swój początek w punkcie określonym przez użytkownika. Punkt ten nazywa się TCP (Tool Center Point). Z reguły TCP ustawiany jest w punkcie roboczym narzędzia.
Zalety pomiaru narzędzia:
Narzędzie może być przesuwane po linii prostej w kierunku uderzenia. Narzędzie może być obracane wokół TCP bez naruszenia pozycji TCP. W trybie programowym: Zaprogramowana szybkość przesuwu utrzymywana jest wzdłuż toru przy TCP.
Robot może zapamiętać maksymalnie 16 układów współrzędnych TOOL. Zmienna: TOOL_DATA[1…16]).
Zapisywane są następujące dane:
X, Y, Z:Początek układu współrzędnych TOOL w odniesieniu do układu FLANGEA, B, C:Zorientowanie układu współrzędnych TOOL w odniesieniu do układu FLANGE
Osie A4, A5 i A6 są mechanicznie połączone. Oznacza to:Jeśli usunięte są parametry osi A4, usunięte są tym samym parametry dla osi A5 i A6. Jeśli usunięte są parametry osi A5, usunięte są tym samym parametry dla osi A6.
Ostrzeżenie!Jeśli robot jest zdekalibrowany, programowane wyłączniki krańcowe nie są aktywne. Robot może uderzyć o bufory na ogranicznikach krańcowych, przez co może uszkodzić się a bufory będzie trzeba wymienić. Zdekalibrowany robot nie powinien być w miarę możliwości wprawiany w ruch lub należy maksymalnie zredukować HOV.
Jeśli narzędzie jest narzędziem stacjonarnym, należy stosować następującą procedurę pomiaru: (>>> 7.7 "Pomiar zewnętrznego TCP oraz narzędzia stacjonarnego" strona 78)
69 / 12820.07.2006 KSS-AD-EA-5x pl
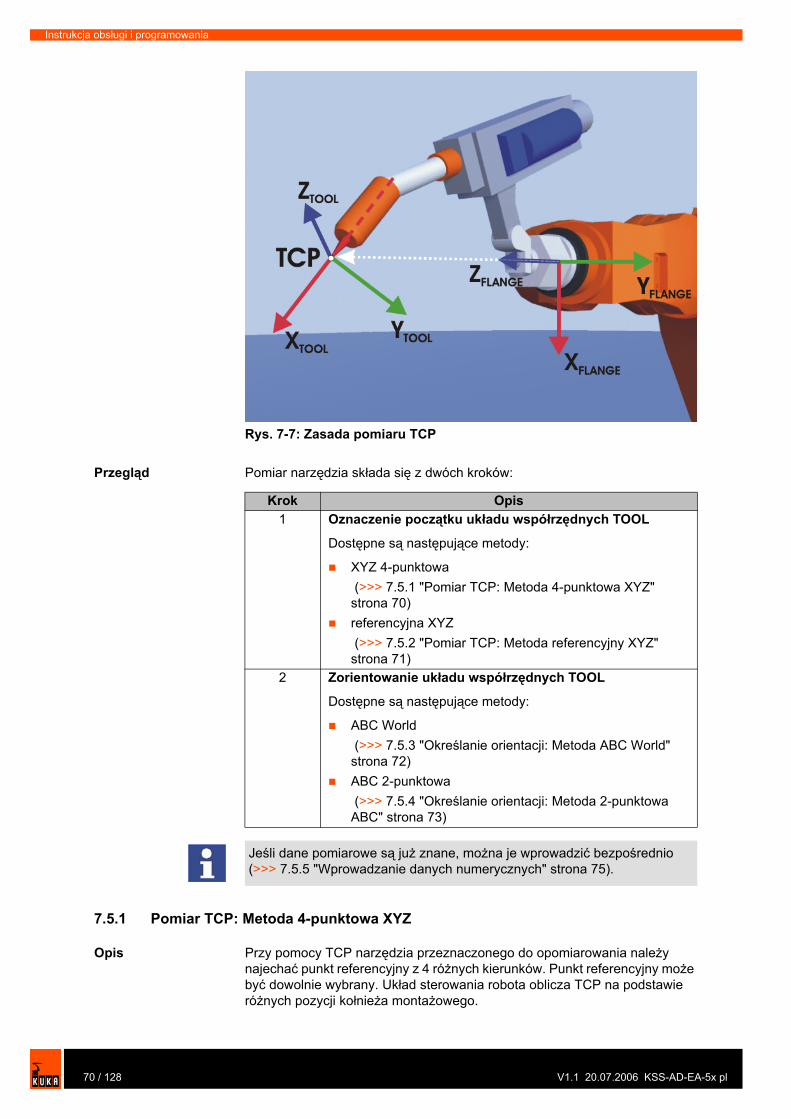
Instrukcja obsługi i programowania
Przegląd Pomiar narzędzia składa się z dwóch kroków:
7.5.1 Pomiar TCP: Metoda 4-punktowa XYZ
Opis Przy pomocy TCP narzędzia przeznaczonego do opomiarowania należy najechać punkt referencyjny z 4 różnych kierunków. Punkt referencyjny może być dowolnie wybrany. Układ sterowania robota oblicza TCP na podstawie różnych pozycji kołnieża montażowego.
Rys. 7-7: Zasada pomiaru TCP
Krok Opis1 Oznaczenie początku układu współrzędnych TOOL
Dostępne są następujące metody:
XYZ 4-punktowa (>>> 7.5.1 "Pomiar TCP: Metoda 4-punktowa XYZ" strona 70)referencyjna XYZ (>>> 7.5.2 "Pomiar TCP: Metoda referencyjny XYZ" strona 71)
2 Zorientowanie układu współrzędnych TOOL
Dostępne są następujące metody:
ABC World (>>> 7.5.3 "Określanie orientacji: Metoda ABC World" strona 72)ABC 2-punktowa (>>> 7.5.4 "Określanie orientacji: Metoda 2-punktowa ABC" strona 73)
Jeśli dane pomiarowe są już znane, można je wprowadzić bezpośrednio (>>> 7.5.5 "Wprowadzanie danych numerycznych" strona 75).
70 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
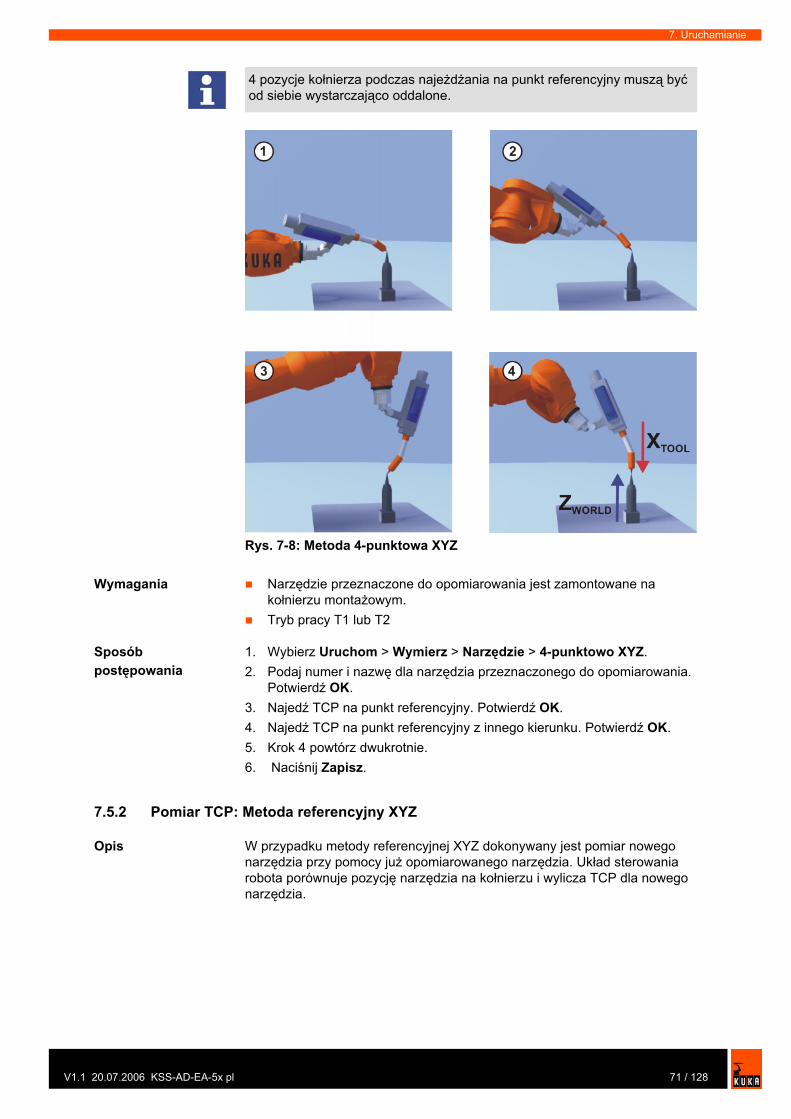
V1.1
7. Uruchamianie
Wymagania Narzędzie przeznaczone do opomiarowania jest zamontowane na kołnierzu montażowym. Tryb pracy T1 lub T2
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Narzędzie > 4-punktowo XYZ.2. Podaj numer i nazwę dla narzędzia przeznaczonego do opomiarowania.
Potwierdź OK.3. Najedź TCP na punkt referencyjny. Potwierdź OK.4. Najedź TCP na punkt referencyjny z innego kierunku. Potwierdź OK.5. Krok 4 powtórz dwukrotnie. 6. Naciśnij Zapisz.
7.5.2 Pomiar TCP: Metoda referencyjny XYZ
Opis W przypadku metody referencyjnej XYZ dokonywany jest pomiar nowego narzędzia przy pomocy już opomiarowanego narzędzia. Układ sterowania robota porównuje pozycję narzędzia na kołnierzu i wylicza TCP dla nowego narzędzia.
4 pozycje kołnierza podczas najeżdżania na punkt referencyjny muszą być od siebie wystarczająco oddalone.
Rys. 7-8: Metoda 4-punktowa XYZ
71 / 12820.07.2006 KSS-AD-EA-5x pl
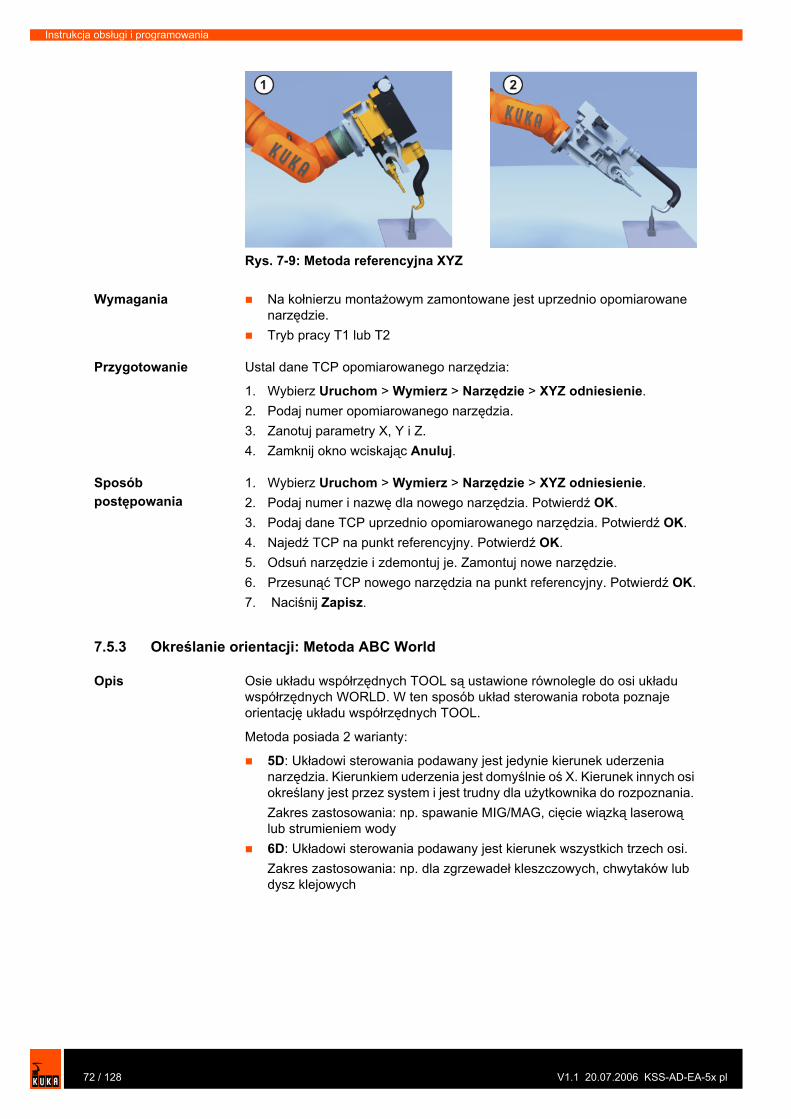
Instrukcja obsługi i programowania
Wymagania Na kołnierzu montażowym zamontowane jest uprzednio opomiarowane narzędzie. Tryb pracy T1 lub T2
Przygotowanie Ustal dane TCP opomiarowanego narzędzia:
1. Wybierz Uruchom > Wymierz > Narzędzie > XYZ odniesienie.2. Podaj numer opomiarowanego narzędzia. 3. Zanotuj parametry X, Y i Z. 4. Zamknij okno wciskając Anuluj.
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Narzędzie > XYZ odniesienie.2. Podaj numer i nazwę dla nowego narzędzia. Potwierdź OK.3. Podaj dane TCP uprzednio opomiarowanego narzędzia. Potwierdź OK.4. Najedź TCP na punkt referencyjny. Potwierdź OK.5. Odsuń narzędzie i zdemontuj je. Zamontuj nowe narzędzie. 6. Przesunąć TCP nowego narzędzia na punkt referencyjny. Potwierdź OK.7. Naciśnij Zapisz.
7.5.3 Określanie orientacji: Metoda ABC World
Opis Osie układu współrzędnych TOOL są ustawione równolegle do osi układu współrzędnych WORLD. W ten sposób układ sterowania robota poznaje orientację układu współrzędnych TOOL.
Metoda posiada 2 warianty:
5D: Układowi sterowania podawany jest jedynie kierunek uderzenia narzędzia. Kierunkiem uderzenia jest domyślnie oś X. Kierunek innych osi określany jest przez system i jest trudny dla użytkownika do rozpoznania. Zakres zastosowania: np. spawanie MIG/MAG, cięcie wiązką laserową lub strumieniem wody6D: Układowi sterowania podawany jest kierunek wszystkich trzech osi. Zakres zastosowania: np. dla zgrzewadeł kleszczowych, chwytaków lub dysz klejowych
Rys. 7-9: Metoda referencyjna XYZ
72 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
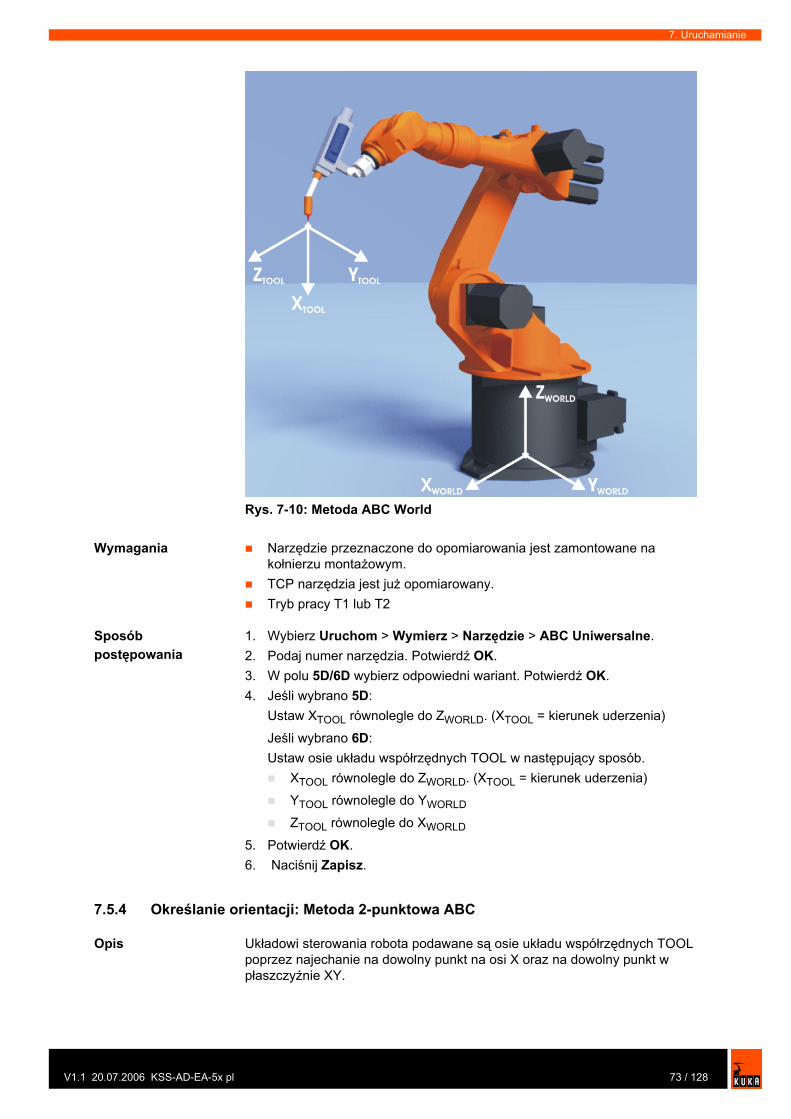
V1.1
7. Uruchamianie
Wymagania Narzędzie przeznaczone do opomiarowania jest zamontowane na kołnierzu montażowym. TCP narzędzia jest już opomiarowany. Tryb pracy T1 lub T2
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Narzędzie > ABC Uniwersalne.2. Podaj numer narzędzia. Potwierdź OK.3. W polu 5D/6D wybierz odpowiedni wariant. Potwierdź OK.4. Jeśli wybrano 5D:
Ustaw XTOOL równolegle do ZWORLD. (XTOOL = kierunek uderzenia)
Jeśli wybrano 6D:Ustaw osie układu współrzędnych TOOL w następujący sposób.
XTOOL równolegle do ZWORLD. (XTOOL = kierunek uderzenia)
YTOOL równolegle do YWORLD
ZTOOL równolegle do XWORLD
5. Potwierdź OK.6. Naciśnij Zapisz.
7.5.4 Określanie orientacji: Metoda 2-punktowa ABC
Opis Układowi sterowania robota podawane są osie układu współrzędnych TOOL poprzez najechanie na dowolny punkt na osi X oraz na dowolny punkt w płaszczyźnie XY.
Rys. 7-10: Metoda ABC World
73 / 12820.07.2006 KSS-AD-EA-5x pl
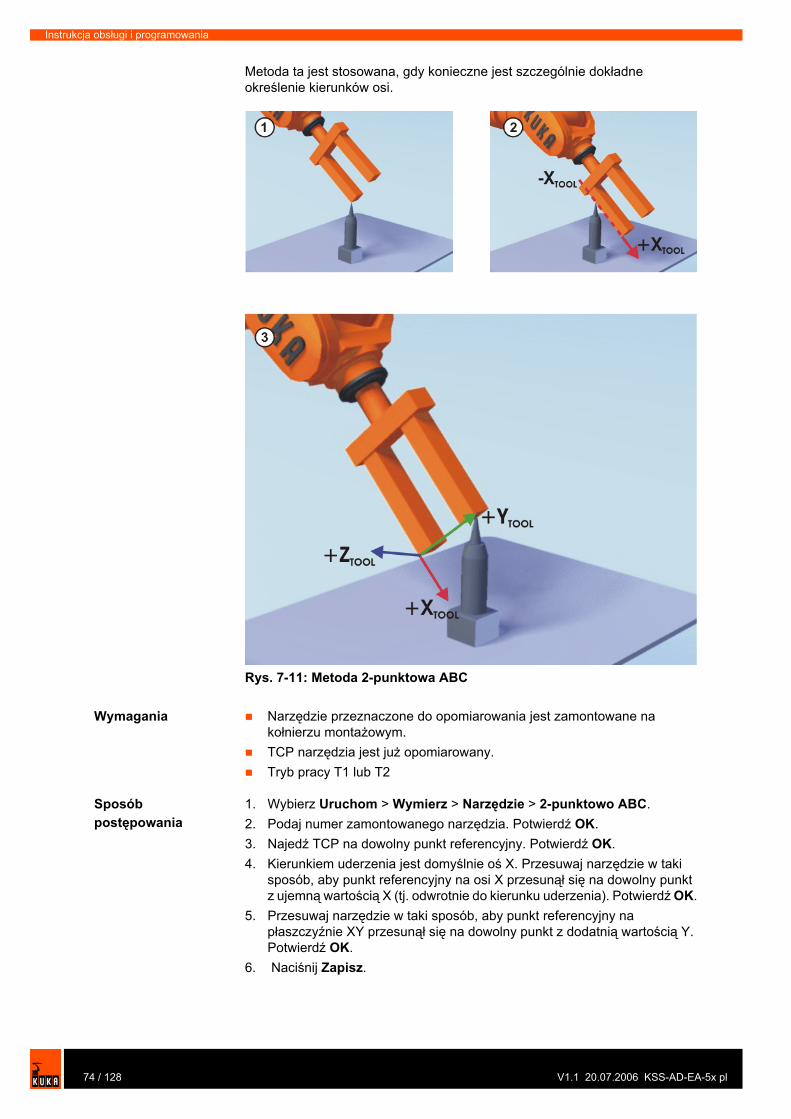
Instrukcja obsługi i programowania
Metoda ta jest stosowana, gdy konieczne jest szczególnie dokładne określenie kierunków osi.
Wymagania Narzędzie przeznaczone do opomiarowania jest zamontowane na kołnierzu montażowym. TCP narzędzia jest już opomiarowany. Tryb pracy T1 lub T2
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Narzędzie > 2-punktowo ABC.2. Podaj numer zamontowanego narzędzia. Potwierdź OK.3. Najedź TCP na dowolny punkt referencyjny. Potwierdź OK.4. Kierunkiem uderzenia jest domyślnie oś X. Przesuwaj narzędzie w taki
sposób, aby punkt referencyjny na osi X przesunął się na dowolny punkt z ujemną wartością X (tj. odwrotnie do kierunku uderzenia). Potwierdź OK.
5. Przesuwaj narzędzie w taki sposób, aby punkt referencyjny na płaszczyźnie XY przesunął się na dowolny punkt z dodatnią wartością Y. Potwierdź OK.
6. Naciśnij Zapisz.
Rys. 7-11: Metoda 2-punktowa ABC
74 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
7. Uruchamianie
7.5.5 Wprowadzanie danych numerycznych
Opis Parametry narzędzia mogą być wprowadzane ręcznie.
Dostępne źródła danych:
CADZewnętrznie opomiarowane narzędzieDane producenta narzędzia
Wymagania Znane są następujące parametry:
X, Y, Z w odniesieniu do układu współrzędnych FLANGEA, B, C w odniesieniu do układu współrzędnych FLANGE
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Narzędzie > Wprowadzanie wartości liczbowych.
2. Podaj numer i nazwę dla narzędzia przeznaczonego do opomiarowania. Potwierdź OK.
3. Wprowadź dane. Potwierdź OK.4. Naciśnij Zapisz.
7.6 Pomiar podstawy
Opis Podczas opomiarowywania podstawy użytkownik przypisuje danej powierzchni roboczej lub obrabianemu elementowi kartezjański układ współrzędnych (BASE). Układ współrzędnych BASE ma swój początek w punkcie określonym przez użytkownika.
Zalety pomiaru podstawy:
TCP może być ręcznie przesuwany wzdłuż krawędzi powierzchni roboczej lub obrabianego elementu. Możliwe jest namierzanie punktów w odniesieniu do podstawy. Jeśli podstawa musi zostać przesunięta, np. ze względu na przesunięcie powierzchni roboczej, punkty ulegają automatycznemu przesunięciu i nie ma potrzeby ich ponownego namierzania.
Robot może zapamiętać maksymalnie 32 układy współrzędnych BASE. Zmienna: BASE_DATA[1…32].
Przegląd Istnieją 2 metody opomiarowania podstawy:
Metoda 3-punktowa (>>> 7.6.1 "Metoda 3-punktowa" strona 76)Metoda pośrednia (>>> 7.6.2 "Metoda pośrednia" strona 77)
Jeśli dane pomiarowe są już znane, można je wprowadzić bezpośrednio (>>> 7.6.3 "Wprowadzanie danych numerycznych" strona 77).
W przypadku robotów paletująch 4-osiowych, np. KR 180PA, parametry narzędzia muszą być wprowadzone numerycznie. Metody XYZ i ABC nie mogą być użyte, gdyż zmiana orientacji w przypadku tych robotów jest możliwa tylko w ograniczonym zakresie.
Jeśli na kołnierzu montażowym znajduje się obrabiany element, należy stosować następującą procedurę pomiaru: (>>> 7.7 "Pomiar zewnętrznego TCP oraz narzędzia stacjonarnego" strona 78)
75 / 12820.07.2006 KSS-AD-EA-5x pl
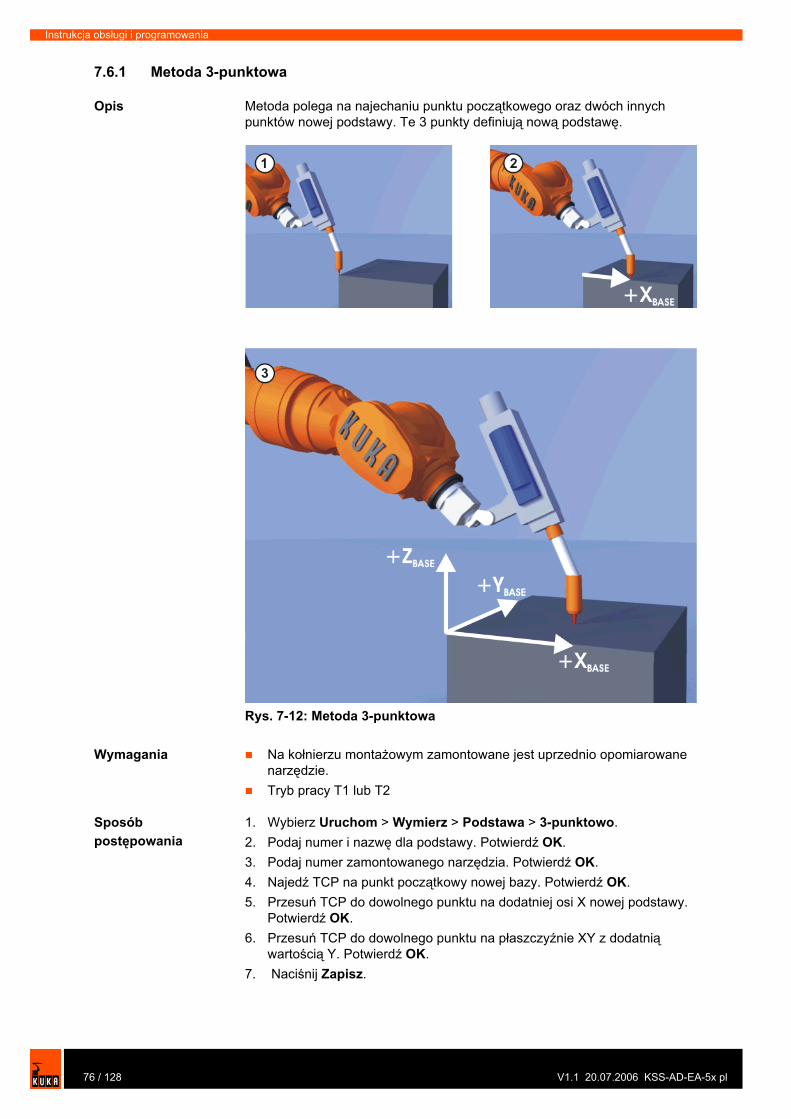
Instrukcja obsługi i programowania
7.6.1 Metoda 3-punktowa
Opis Metoda polega na najechaniu punktu początkowego oraz dwóch innych punktów nowej podstawy. Te 3 punkty definiują nową podstawę.
Wymagania Na kołnierzu montażowym zamontowane jest uprzednio opomiarowane narzędzie. Tryb pracy T1 lub T2
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Podstawa > 3-punktowo.2. Podaj numer i nazwę dla podstawy. Potwierdź OK.3. Podaj numer zamontowanego narzędzia. Potwierdź OK.4. Najedź TCP na punkt początkowy nowej bazy. Potwierdź OK.5. Przesuń TCP do dowolnego punktu na dodatniej osi X nowej podstawy.
Potwierdź OK.6. Przesuń TCP do dowolnego punktu na płaszczyźnie XY z dodatnią
wartością Y. Potwierdź OK.7. Naciśnij Zapisz.
Rys. 7-12: Metoda 3-punktowa
76 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
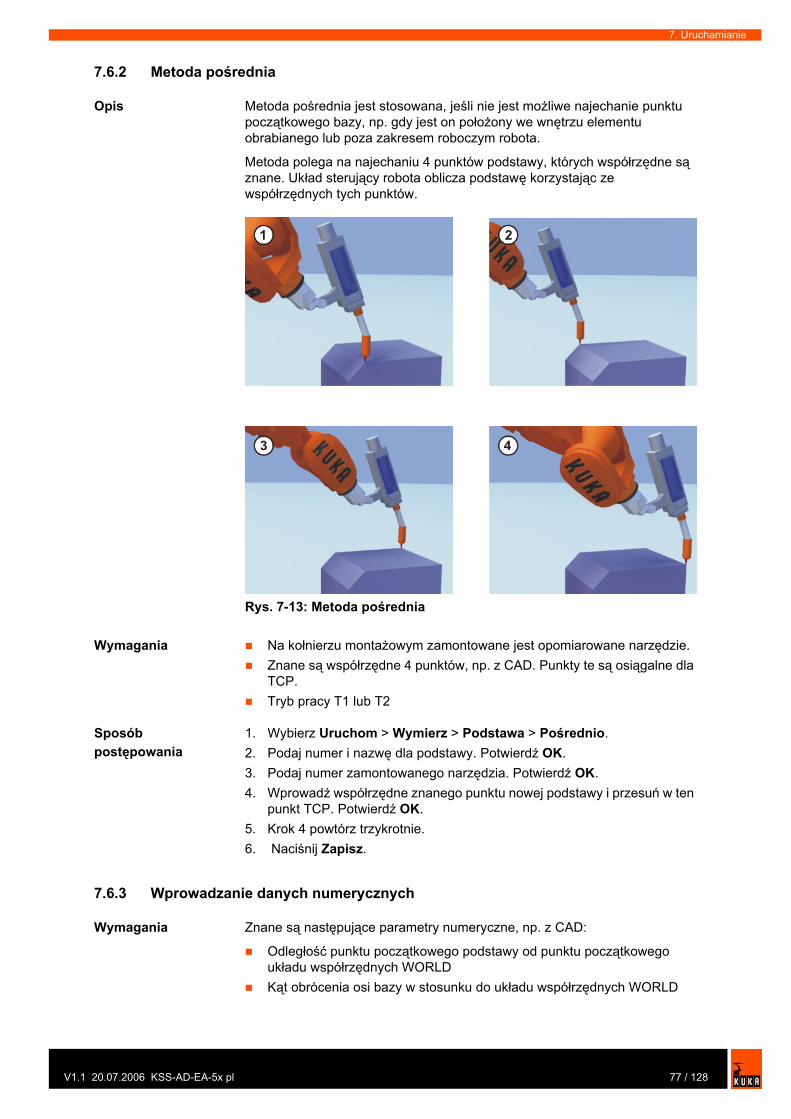
V1.1
7. Uruchamianie
7.6.2 Metoda pośrednia
Opis Metoda pośrednia jest stosowana, jeśli nie jest możliwe najechanie punktu początkowego bazy, np. gdy jest on położony we wnętrzu elementu obrabianego lub poza zakresem roboczym robota.
Metoda polega na najechaniu 4 punktów podstawy, których współrzędne są znane. Układ sterujący robota oblicza podstawę korzystając ze współrzędnych tych punktów.
Wymagania Na kołnierzu montażowym zamontowane jest opomiarowane narzędzie. Znane są współrzędne 4 punktów, np. z CAD. Punkty te są osiągalne dla TCP. Tryb pracy T1 lub T2
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Podstawa > Pośrednio.2. Podaj numer i nazwę dla podstawy. Potwierdź OK.3. Podaj numer zamontowanego narzędzia. Potwierdź OK.4. Wprowadź współrzędne znanego punktu nowej podstawy i przesuń w ten
punkt TCP. Potwierdź OK.5. Krok 4 powtórz trzykrotnie. 6. Naciśnij Zapisz.
7.6.3 Wprowadzanie danych numerycznych
Wymagania Znane są następujące parametry numeryczne, np. z CAD:
Odległość punktu początkowego podstawy od punktu początkowego układu współrzędnych WORLDKąt obrócenia osi bazy w stosunku do układu współrzędnych WORLD
Rys. 7-13: Metoda pośrednia
77 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Podstawa > Wprowadzanie wartości liczbowych.
2. Podaj numer i nazwę dla podstawy. Potwierdź OK.3. Wprowadź dane. Potwierdź OK.4. Naciśnij Zapisz.
7.7 Pomiar zewnętrznego TCP oraz narzędzia stacjonarnego
Przegląd Pomiar narzędzia stacjonarnego składa się z 2 kroków:
Układ sterowania robota zapisuje zewnętrzny TCP jako układ współrzędnych BASE i element obrabiany jako układ współrzędnych TOOL. W sumie robot może zapamiętać maksymalnie 32 układy współrzędnych BASE oraz 16 układów współrzędnych TOOL.
7.7.1 Mierzenie zewnętrznego TCP
Opis Najpierw należy podać układowi sterowania robota TCP narzędzia stacjonarnego. W tym celu należy najechać na niego już opomiarowanym narzędziem.
Następnie należy podać układowi sterowania robota orientację układu współrzędnych narzędzia stacjonarnego. W tym celu należy ustawić układ współrzędnych uprzednio opomiarowanego narzędzia równolegle do nowego układu współrzędnych. Dostępne są 2 warianty:
5D: Układowi sterowania podawany jest jedynie kierunek uderzenia narzędzia stacjonarnego. Kierunkiem uderzenia jest domyślnie oś X. Kierunek innych osi określany jest przez system i jest trudny dla użytkownika do rozpoznania. 6D: Układowi sterowania podawany jest kierunek wszystkich trzech osi.
Krok Opis1 Pomiar TCP narzędzia stacjonarnego
(>>> 7.7.1 "Mierzenie zewnętrznego TCP" strona 78)
Jeśli dane pomiarowe są już znane, można je wprowadzić bezpośrednio.
(>>> 7.7.2 "Numeryczne wprowadzanie zewnętrznego TCP" strona 80)
2 Pomiar elementu obrabianego
Dostępne są następujące metody:
Metoda bezpośrednia (>>> 7.7.3 "Pomiar elementu obrabianego: Metoda bezpośrednia" strona 80)Metoda pośrednia (>>> 7.7.4 "Pomiar elementu obrabianego: Metoda pośrednia" strona 81)
78 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl

V1.1
7. Uruchamianie
Wymagania Na kołnierzu montażowym zamontowane jest uprzednio opomiarowane narzędzie. Tryb pracy T1 lub T2
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Narzędzie stacjonarne > Narzędzie.2. Podaj numer i nazwę dla narzędzia stacjonarnego. Potwierdź OK.3. Podaj numer uprzednio opomiarowanego narzędzia. Potwierdź OK.4. W polu 5D/6D wybierz odpowiedni wariant. Potwierdź OK.5. Przesuń TCP uprzednio opomiarowanego narządzia na TCP narzędzia
stacjonarnego. Potwierdź OK.6. Jeśli wybrano 5D:
Ustaw XBASE równolegle do ZFLANGE.
Rys. 7-14: Najedź zewnętrzny TCP
Rys. 7-15: Ustaw układy współrzędnych równolegle do siebie
79 / 12820.07.2006 KSS-AD-EA-5x pl
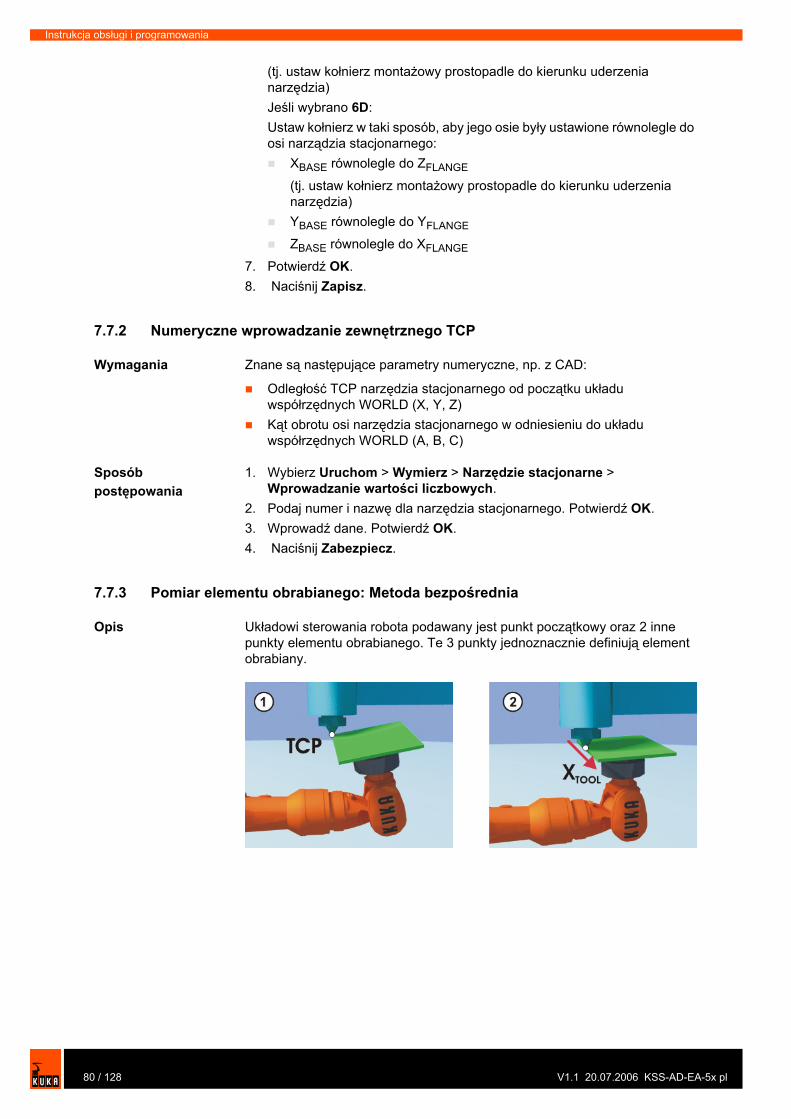
Instrukcja obsługi i programowania
(tj. ustaw kołnierz montażowy prostopadle do kierunku uderzenia narzędzia)Jeśli wybrano 6D: Ustaw kołnierz w taki sposób, aby jego osie były ustawione równolegle do osi narządzia stacjonarnego:
XBASE równolegle do ZFLANGE
(tj. ustaw kołnierz montażowy prostopadle do kierunku uderzenia narzędzia)YBASE równolegle do YFLANGE
ZBASE równolegle do XFLANGE
7. Potwierdź OK.8. Naciśnij Zapisz.
7.7.2 Numeryczne wprowadzanie zewnętrznego TCP
Wymagania Znane są następujące parametry numeryczne, np. z CAD:
Odległość TCP narzędzia stacjonarnego od początku układu współrzędnych WORLD (X, Y, Z)Kąt obrotu osi narzędzia stacjonarnego w odniesieniu do układu współrzędnych WORLD (A, B, C)
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Narzędzie stacjonarne > Wprowadzanie wartości liczbowych.
2. Podaj numer i nazwę dla narzędzia stacjonarnego. Potwierdź OK.3. Wprowadź dane. Potwierdź OK.4. Naciśnij Zabezpiecz.
7.7.3 Pomiar elementu obrabianego: Metoda bezpośrednia
Opis Układowi sterowania robota podawany jest punkt początkowy oraz 2 inne punkty elementu obrabianego. Te 3 punkty jednoznacznie definiują element obrabiany.
80 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
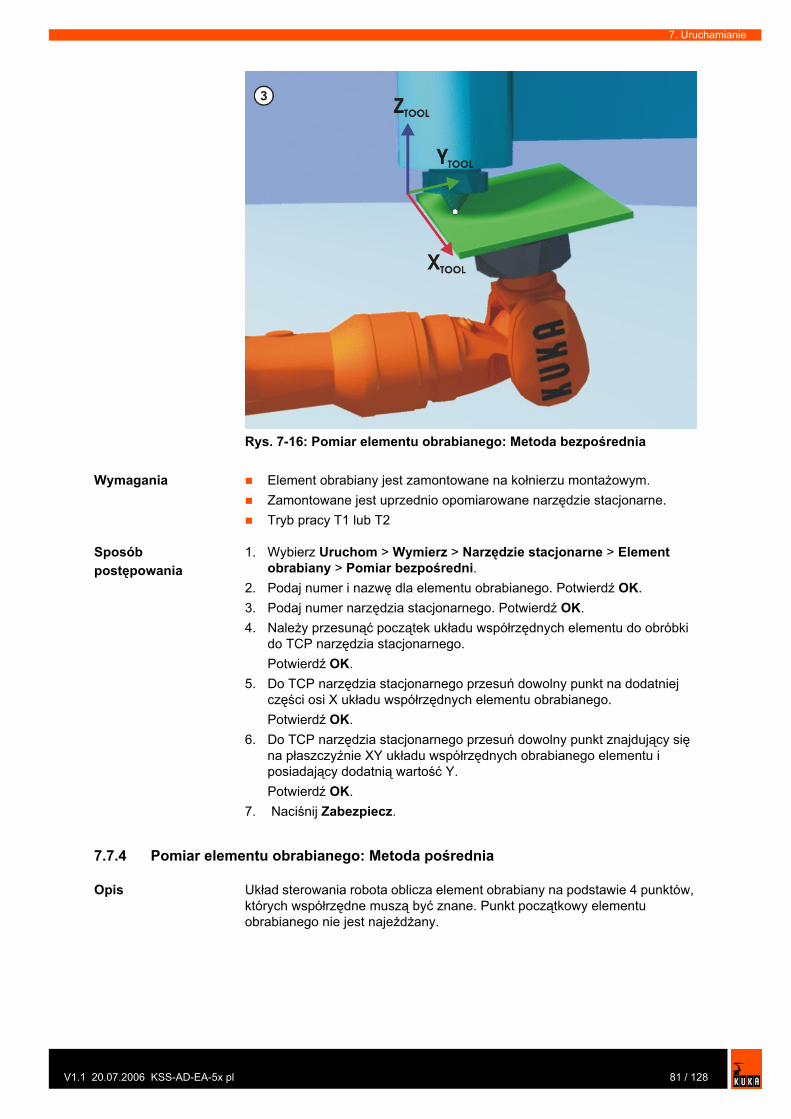
V1.1
7. Uruchamianie
Wymagania Element obrabiany jest zamontowane na kołnierzu montażowym. Zamontowane jest uprzednio opomiarowane narzędzie stacjonarne. Tryb pracy T1 lub T2
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Narzędzie stacjonarne > Element obrabiany > Pomiar bezpośredni.
2. Podaj numer i nazwę dla elementu obrabianego. Potwierdź OK.3. Podaj numer narzędzia stacjonarnego. Potwierdź OK.4. Należy przesunąć początek układu współrzędnych elementu do obróbki
do TCP narzędzia stacjonarnego.Potwierdź OK.
5. Do TCP narzędzia stacjonarnego przesuń dowolny punkt na dodatniej części osi X układu współrzędnych elementu obrabianego. Potwierdź OK.
6. Do TCP narzędzia stacjonarnego przesuń dowolny punkt znajdujący się na płaszczyźnie XY układu współrzędnych obrabianego elementu i posiadający dodatnią wartość Y. Potwierdź OK.
7. Naciśnij Zabezpiecz.
7.7.4 Pomiar elementu obrabianego: Metoda pośrednia
Opis Układ sterowania robota oblicza element obrabiany na podstawie 4 punktów, których współrzędne muszą być znane. Punkt początkowy elementu obrabianego nie jest najeżdżany.
Rys. 7-16: Pomiar elementu obrabianego: Metoda bezpośrednia
81 / 12820.07.2006 KSS-AD-EA-5x pl
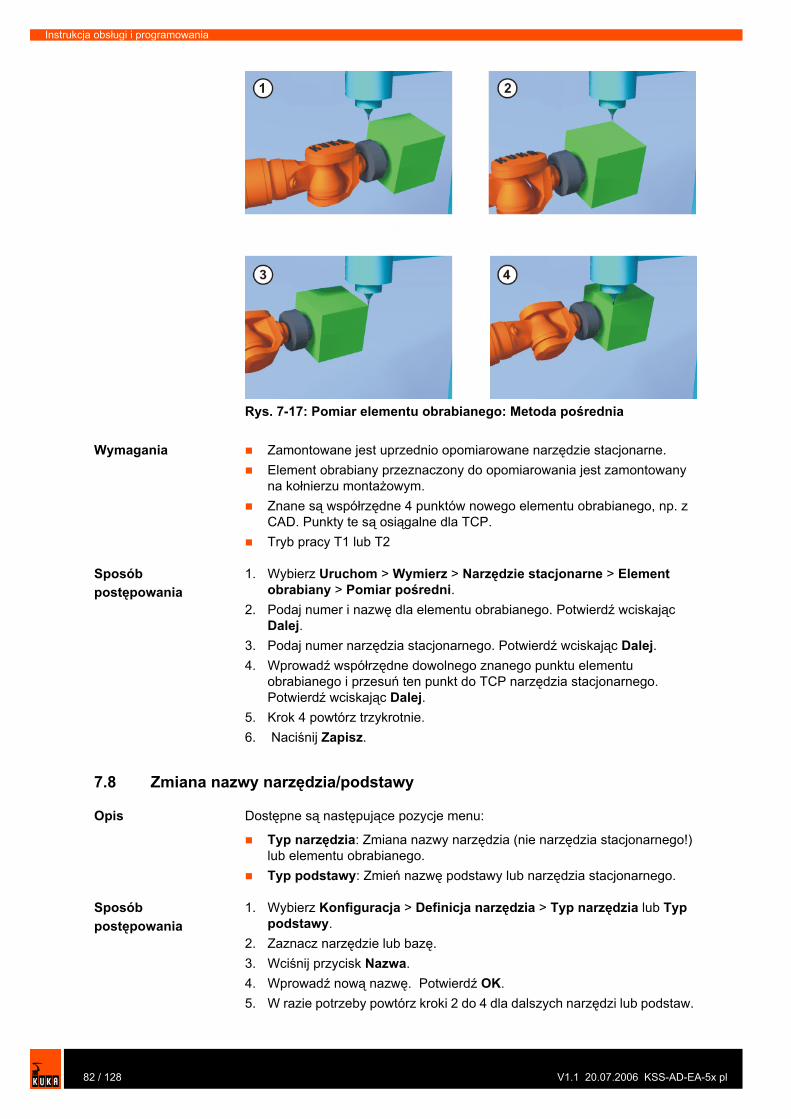
Instrukcja obsługi i programowania
Wymagania Zamontowane jest uprzednio opomiarowane narzędzie stacjonarne. Element obrabiany przeznaczony do opomiarowania jest zamontowany na kołnierzu montażowym. Znane są współrzędne 4 punktów nowego elementu obrabianego, np. z CAD. Punkty te są osiągalne dla TCP. Tryb pracy T1 lub T2
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Narzędzie stacjonarne > Element obrabiany > Pomiar pośredni.
2. Podaj numer i nazwę dla elementu obrabianego. Potwierdź wciskając Dalej.
3. Podaj numer narzędzia stacjonarnego. Potwierdź wciskając Dalej.4. Wprowadź współrzędne dowolnego znanego punktu elementu
obrabianego i przesuń ten punkt do TCP narzędzia stacjonarnego. Potwierdź wciskając Dalej.
5. Krok 4 powtórz trzykrotnie. 6. Naciśnij Zapisz.
7.8 Zmiana nazwy narzędzia/podstawy
Opis Dostępne są następujące pozycje menu:
Typ narzędzia: Zmiana nazwy narzędzia (nie narzędzia stacjonarnego!) lub elementu obrabianego. Typ podstawy: Zmień nazwę podstawy lub narzędzia stacjonarnego.
Sposób postępowania
1. Wybierz Konfiguracja > Definicja narzędzia > Typ narzędzia lub Typ podstawy.
2. Zaznacz narzędzie lub bazę. 3. Wciśnij przycisk Nazwa.4. Wprowadź nową nazwę. Potwierdź OK.5. W razie potrzeby powtórz kroki 2 do 4 dla dalszych narzędzi lub podstaw.
Rys. 7-17: Pomiar elementu obrabianego: Metoda pośrednia
82 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
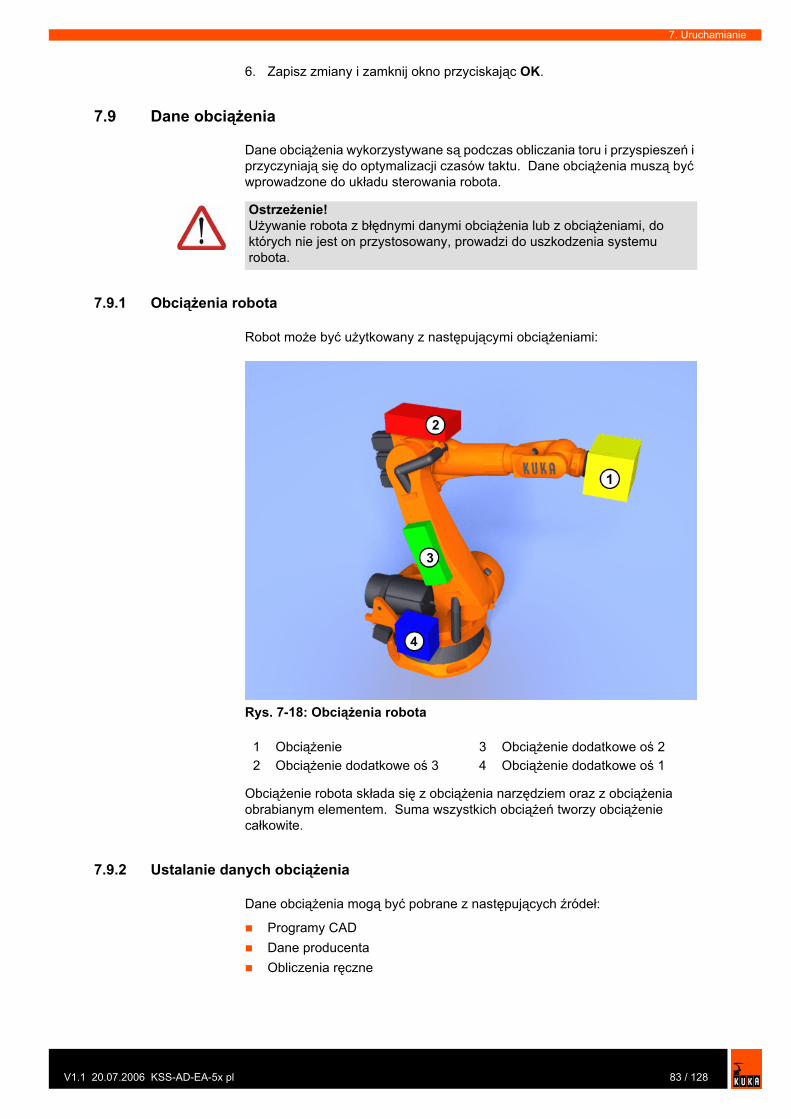
V1.1
7. Uruchamianie
6. Zapisz zmiany i zamknij okno przyciskając OK.
7.9 Dane obciążenia
Dane obciążenia wykorzystywane są podczas obliczania toru i przyspieszeń i przyczyniają się do optymalizacji czasów taktu. Dane obciążenia muszą być wprowadzone do układu sterowania robota.
7.9.1 Obciążenia robota
Robot może być użytkowany z następującymi obciążeniami:
Obciążenie robota składa się z obciążenia narzędziem oraz z obciążenia obrabianym elementem. Suma wszystkich obciążeń tworzy obciążenie całkowite.
7.9.2 Ustalanie danych obciążenia
Dane obciążenia mogą być pobrane z następujących źródeł:
Programy CADDane producentaObliczenia ręczne
Ostrzeżenie!Używanie robota z błędnymi danymi obciążenia lub z obciążeniami, do których nie jest on przystosowany, prowadzi do uszkodzenia systemu robota.
Rys. 7-18: Obciążenia robota
1 Obciążenie 3 Obciążenie dodatkowe oś 22 Obciążenie dodatkowe oś 3 4 Obciążenie dodatkowe oś 1
83 / 12820.07.2006 KSS-AD-EA-5x pl
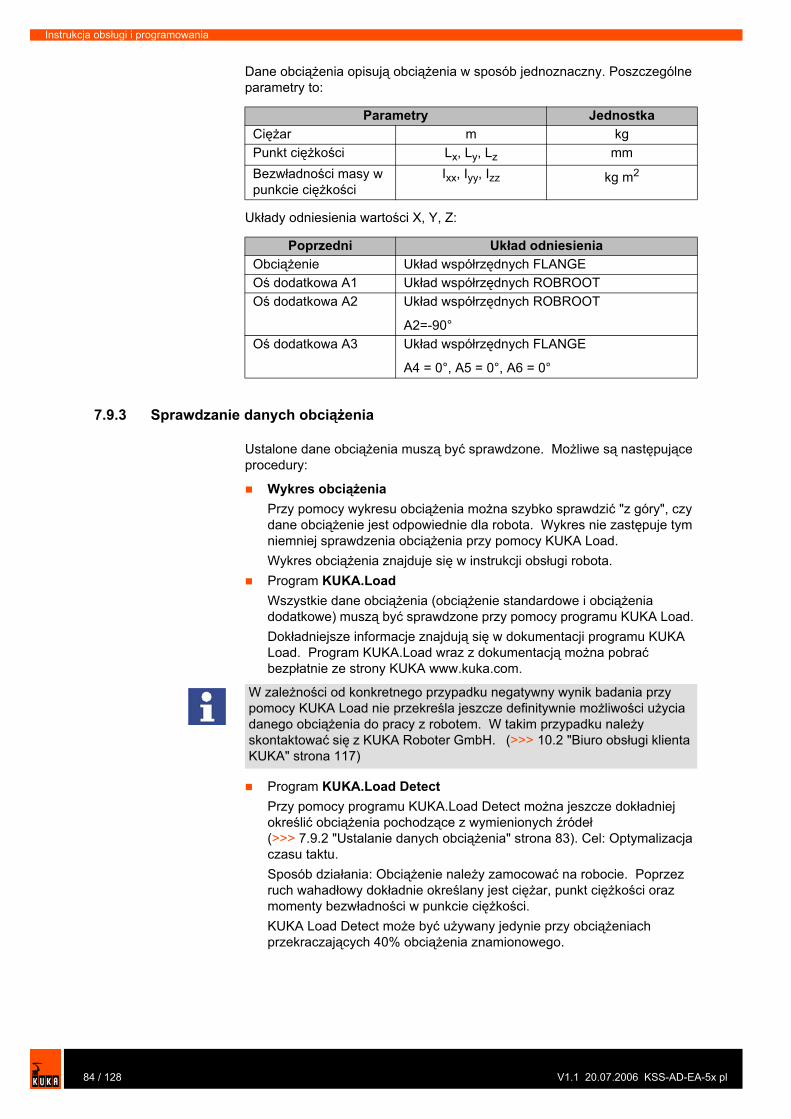
Instrukcja obsługi i programowania
Dane obciążenia opisują obciążenia w sposób jednoznaczny. Poszczególne parametry to:
Układy odniesienia wartości X, Y, Z:
7.9.3 Sprawdzanie danych obciążenia
Ustalone dane obciążenia muszą być sprawdzone. Możliwe są następujące procedury:
Wykres obciążeniaPrzy pomocy wykresu obciążenia można szybko sprawdzić "z góry", czy dane obciążenie jest odpowiednie dla robota. Wykres nie zastępuje tym niemniej sprawdzenia obciążenia przy pomocy KUKA Load. Wykres obciążenia znajduje się w instrukcji obsługi robota. Program KUKA.LoadWszystkie dane obciążenia (obciążenie standardowe i obciążenia dodatkowe) muszą być sprawdzone przy pomocy programu KUKA Load. Dokładniejsze informacje znajdują się w dokumentacji programu KUKA Load. Program KUKA.Load wraz z dokumentacją można pobrać bezpłatnie ze strony KUKA www.kuka.com.
Program KUKA.Load DetectPrzy pomocy programu KUKA.Load Detect można jeszcze dokładniej określić obciążenia pochodzące z wymienionych źródeł (>>> 7.9.2 "Ustalanie danych obciążenia" strona 83). Cel: Optymalizacja czasu taktu. Sposób działania: Obciążenie należy zamocować na robocie. Poprzez ruch wahadłowy dokładnie określany jest ciężar, punkt ciężkości oraz momenty bezwładności w punkcie ciężkości. KUKA Load Detect może być używany jedynie przy obciążeniach przekraczających 40% obciążenia znamionowego.
Parametry JednostkaCiężar m kgPunkt ciężkości Lx, Ly, Lz mmBezwładności masy w punkcie ciężkości
Ixx, Iyy, Izz kg m2
Poprzedni Układ odniesieniaObciążenie Układ współrzędnych FLANGEOś dodatkowa A1 Układ współrzędnych ROBROOTOś dodatkowa A2 Układ współrzędnych ROBROOT
A2=-90°Oś dodatkowa A3 Układ współrzędnych FLANGE
A4 = 0°, A5 = 0°, A6 = 0°
W zależności od konkretnego przypadku negatywny wynik badania przy pomocy KUKA Load nie przekreśla jeszcze definitywnie możliwości użycia danego obciążenia do pracy z robotem. W takim przypadku należy skontaktować się z KUKA Roboter GmbH. (>>> 10.2 "Biuro obsługi klienta KUKA" strona 117)
84 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
7. Uruchamianie
7.9.4 Wprowadzanie danych obciążenia
Wymagania Dane obciążenia zostały sprawdzone przy pomocy KUKA Load i nadają się dla tego typu robota. (>>> 7.9.3 "Sprawdzanie danych obciążenia" strona 84)
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Narzędzie > Dane obciążenia narzędzia.
2. Podaj numer narzędzia. Potwierdź OK.3. Wprowadź dane obciążenia. Potwierdź OK.4. Naciśnij Zapisz.
7.9.5 Wprowadzanie danych dodatkowego obciążenia
Wymagania Dane dodatkowego obciążenia zostały sprawdzone przy pomocy KUKA Load i nadają się dla tego typu robota. (>>> 7.9.3 "Sprawdzanie danych obciążenia" strona 84)
Sposób postępowania
1. Wybierz Uruchom > Wymierz > Dane obciążenia dodatkowego.2. Wprowadź numer osi, do której przymocowane jest dodatkowe
obciążenie. Potwierdź OK.3. Wprowadź dane obciążenia. Potwierdź OK.4. Naciśnij Zapisz.
Ostrzeżenie!Używanie robota z błędnymi danymi obciążenia lub z obciążeniami, do których nie jest on przystosowany, prowadzi do uszkodzenia systemu robota.
85 / 12820.07.2006 KSS-AD-EA-5x pl

Instrukcja obsługi i programowania
86 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
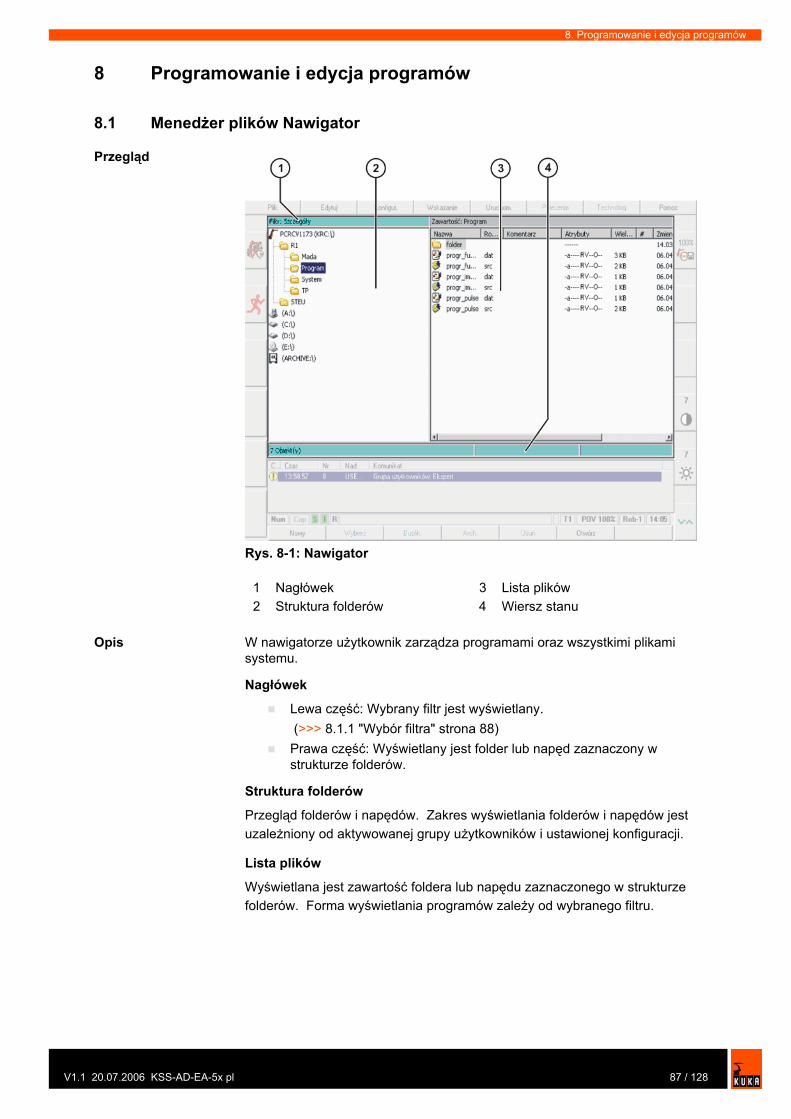
V1.1
8. Programowanie i edycja programów
8 Programowanie i edycja programów
8.1 Menedżer plików Nawigator
Przegląd
Opis W nawigatorze użytkownik zarządza programami oraz wszystkimi plikami systemu.
Nagłówek
Lewa część: Wybrany filtr jest wyświetlany. (>>> 8.1.1 "Wybór filtra" strona 88)Prawa część: Wyświetlany jest folder lub napęd zaznaczony w strukturze folderów.
Struktura folderów
Przegląd folderów i napędów. Zakres wyświetlania folderów i napędów jest uzależniony od aktywowanej grupy użytkowników i ustawionej konfiguracji.
Lista plików
Wyświetlana jest zawartość foldera lub napędu zaznaczonego w strukturze folderów. Forma wyświetlania programów zależy od wybranego filtru.
Rys. 8-1: Nawigator
1 Nagłówek 3 Lista plików2 Struktura folderów 4 Wiersz stanu
87 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Lista plików posiada następujące kolumny:
Listę plików można przewijać w prawo lub w lewo przy pomocy klawiszy SHIFT+klawisz kierunkowy "w prawo" lub SHIFT+klawisz kierunkowy "w lewo".
Dla obiektów na liście plików dostępne są menu kontekstowe. Wywoływanie menu kontekstowego: Zaznacz obiekt/obiekty i wciśnij klawisz kierunkowy "w prawo".
Pasek stanu
Pasek stanu może pokazywać następujące informacje:
Zaznaczone obiektyCzynności w tokuDialogi użytkownikaWezwania do wprowadzenia danych przez użytkownikaZapytania o potwierdzenie
8.1.1 Wybór filtra
Opis Ta funkcja nie jest dostępna w grupie "Użytkownik".
Filtr określa sposób wyświetlania programów na liście plików. Dostępne są następujące filtry:
SzczegółyProgramy są wyświetlane jako pliki SRC i DAT. (ustawienie domyślne)ModułyProgramy są wyświetlane jako moduły.
Sposób postępowania
1. Wybierz Plik > Filtr.2. W lewej części Nawigatora zaznacz żądany filtr. 3. Potwierdź OK.
Kolumna OpisNazwa Nazwa folderu wzgl. nazwa pliku
Rozszerzenie (extension)
Rozszerzenie pliku (file extension)
Ta kolumna nie jest wyświetlana dla grupy użytkowników Użytkownik.
Komentarz KomentarzAtrybuty Atrybuty systemu operacyjnego i podstawowego
Ta kolumna nie jest wyświetlana dla grupy użytkowników Użytkownik.
Wielkość Wielkość pliku w KB
Ta kolumna nie jest wyświetlana dla grupy użytkowników Użytkownik.
# Liczba modyfikacji danego plikuZmieniony Data i godzina ostatniej zmianyUtworzono Data i godzina utworzenia pliku
Ta kolumna nie jest wyświetlana dla grupy użytkowników Użytkownik.
88 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
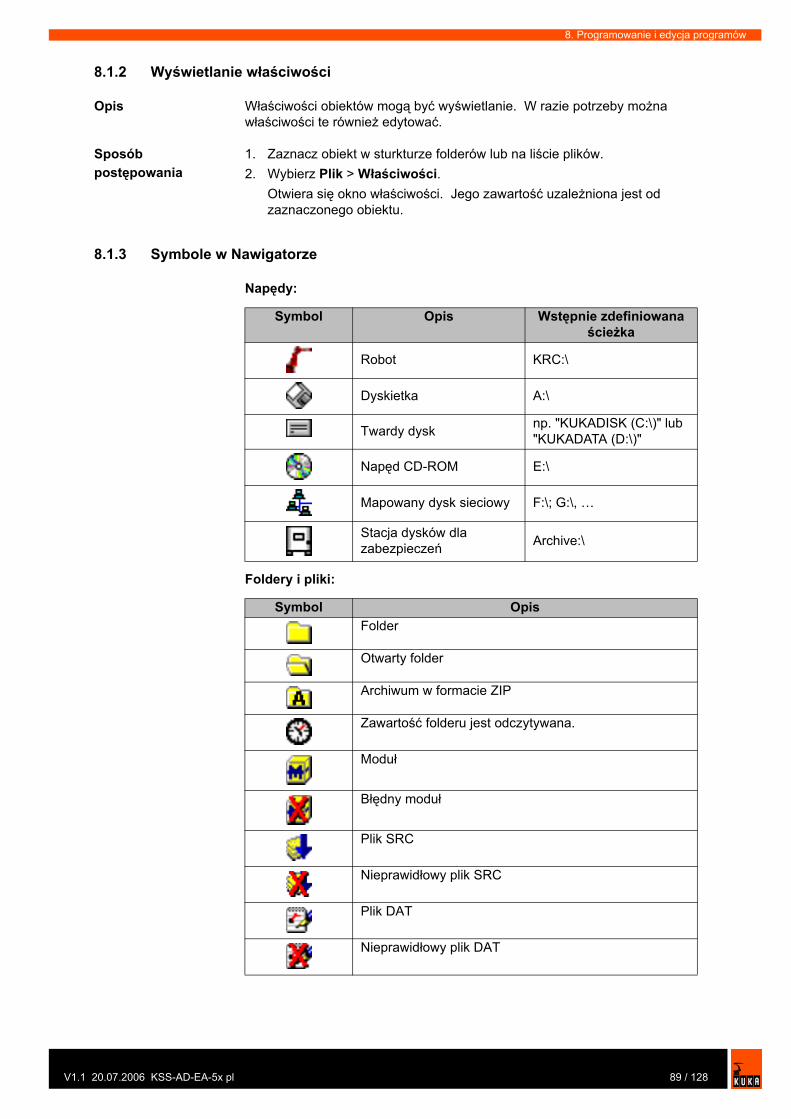
V1.1
8. Programowanie i edycja programów
8.1.2 Wyświetlanie właściwości
Opis Właściwości obiektów mogą być wyświetlanie. W razie potrzeby można właściwości te również edytować.
Sposób postępowania
1. Zaznacz obiekt w sturkturze folderów lub na liście plików. 2. Wybierz Plik > Właściwości.
Otwiera się okno właściwości. Jego zawartość uzależniona jest od zaznaczonego obiektu.
8.1.3 Symbole w Nawigatorze
Napędy:
Foldery i pliki:
Symbol Opis Wstępnie zdefiniowana ścieżka
Robot KRC:\
Dyskietka A:\
Twardy dysk np. "KUKADISK (C:\)" lub "KUKADATA (D:\)"
Napęd CD-ROM E:\
Mapowany dysk sieciowy F:\; G:\, …
Stacja dysków dla zabezpieczeń Archive:\
Symbol OpisFolder
Otwarty folder
Archiwum w formacie ZIP
Zawartość folderu jest odczytywana.
Moduł
Błędny moduł
Plik SRC
Nieprawidłowy plik SRC
Plik DAT
Nieprawidłowy plik DAT
89 / 12820.07.2006 KSS-AD-EA-5x pl
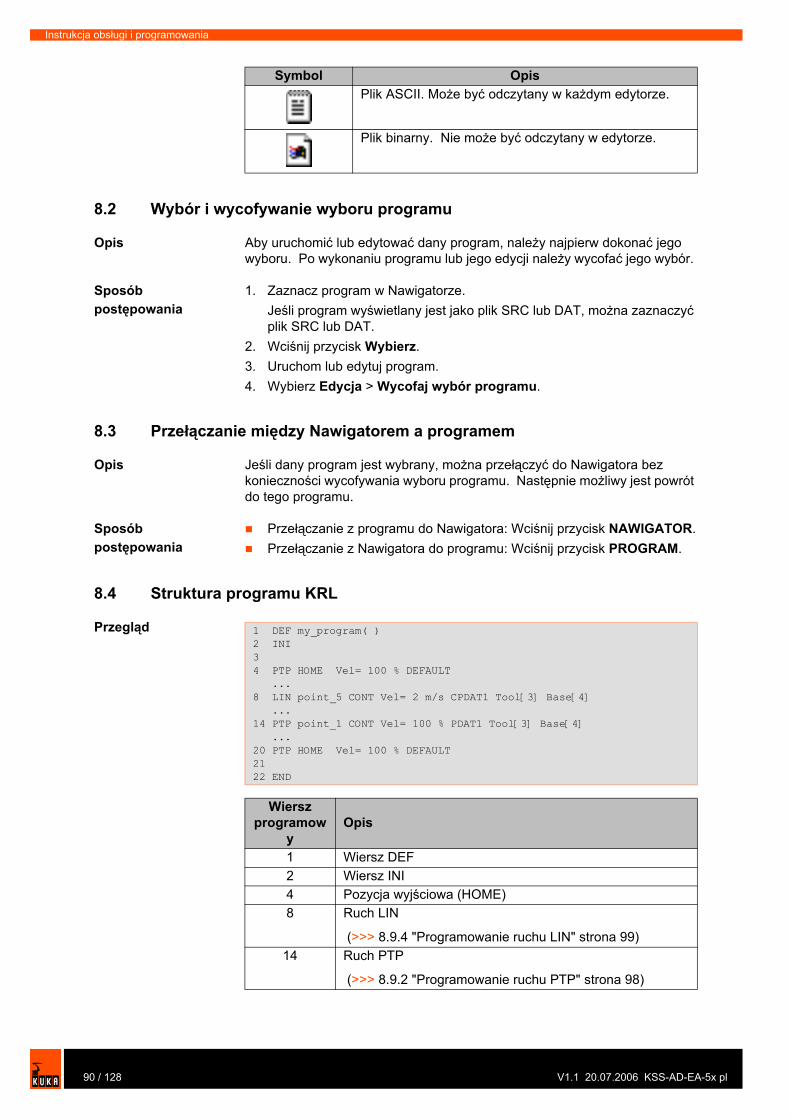
Instrukcja obsługi i programowania
8.2 Wybór i wycofywanie wyboru programu
Opis Aby uruchomić lub edytować dany program, należy najpierw dokonać jego wyboru. Po wykonaniu programu lub jego edycji należy wycofać jego wybór.
Sposób postępowania
1. Zaznacz program w Nawigatorze. Jeśli program wyświetlany jest jako plik SRC lub DAT, można zaznaczyć plik SRC lub DAT.
2. Wciśnij przycisk Wybierz.3. Uruchom lub edytuj program. 4. Wybierz Edycja > Wycofaj wybór programu.
8.3 Przełączanie między Nawigatorem a programem
Opis Jeśli dany program jest wybrany, można przełączyć do Nawigatora bez konieczności wycofywania wyboru programu. Następnie możliwy jest powrót do tego programu.
Sposób postępowania
Przełączanie z programu do Nawigatora: Wciśnij przycisk NAWIGATOR.Przełączanie z Nawigatora do programu: Wciśnij przycisk PROGRAM.
8.4 Struktura programu KRL
Przegląd
Plik ASCII. Może być odczytany w każdym edytorze.
Plik binarny. Nie może być odczytany w edytorze.
Symbol Opis
1 DEF my_program( )2 INI34 PTP HOME Vel= 100 % DEFAULT ...8 LIN point_5 CONT Vel= 2 m/s CPDAT1 Tool[3] Base[4] ...14 PTP point_1 CONT Vel= 100 % PDAT1 Tool[3] Base[4] ...20 PTP HOME Vel= 100 % DEFAULT2122 END
Wiersz programow
yOpis
1 Wiersz DEF2 Wiersz INI4 Pozycja wyjściowa (HOME)8 Ruch LIN
(>>> 8.9.4 "Programowanie ruchu LIN" strona 99)14 Ruch PTP
(>>> 8.9.2 "Programowanie ruchu PTP" strona 98)
90 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
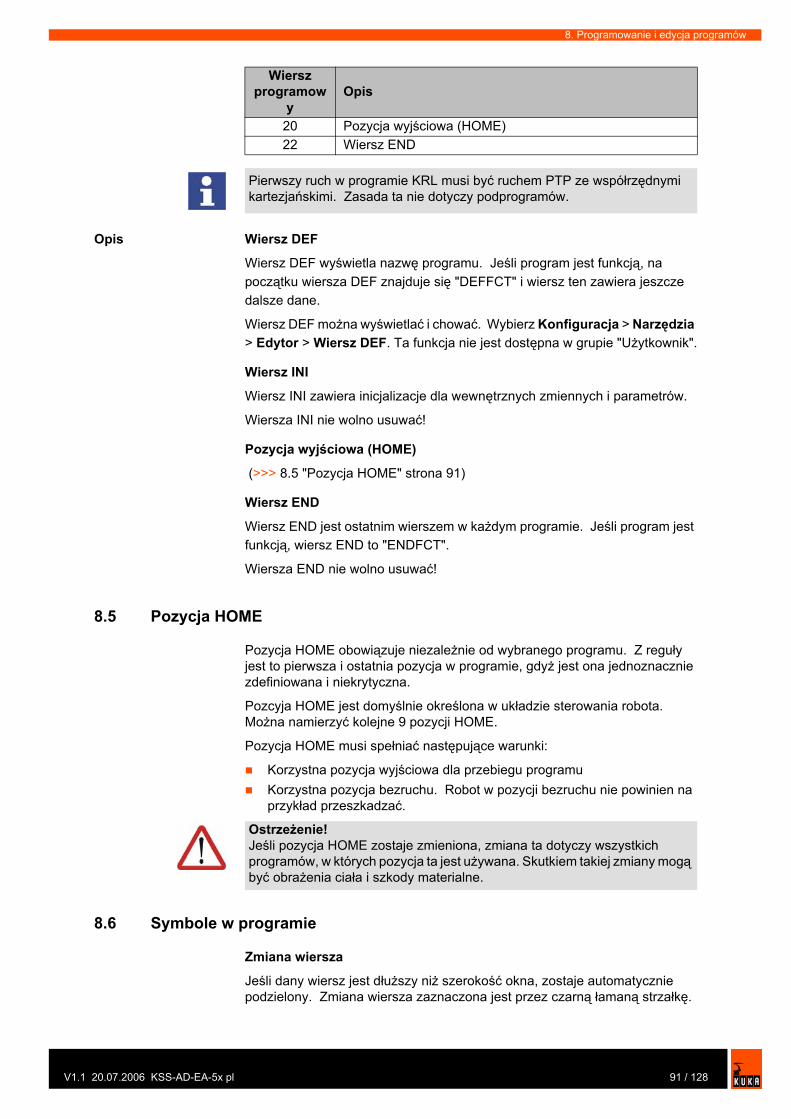
V1.1
8. Programowanie i edycja programów
Opis Wiersz DEF
Wiersz DEF wyświetla nazwę programu. Jeśli program jest funkcją, na początku wiersza DEF znajduje się "DEFFCT" i wiersz ten zawiera jeszcze dalsze dane.
Wiersz DEF można wyświetlać i chować. Wybierz Konfiguracja > Narzędzia > Edytor > Wiersz DEF. Ta funkcja nie jest dostępna w grupie "Użytkownik".
Wiersz INI
Wiersz INI zawiera inicjalizacje dla wewnętrznych zmiennych i parametrów.
Wiersza INI nie wolno usuwać!
Pozycja wyjściowa (HOME)
(>>> 8.5 "Pozycja HOME" strona 91)
Wiersz END
Wiersz END jest ostatnim wierszem w każdym programie. Jeśli program jest funkcją, wiersz END to "ENDFCT".
Wiersza END nie wolno usuwać!
8.5 Pozycja HOME
Pozycja HOME obowiązuje niezależnie od wybranego programu. Z reguły jest to pierwsza i ostatnia pozycja w programie, gdyż jest ona jednoznacznie zdefiniowana i niekrytyczna.
Pozcyja HOME jest domyślnie określona w układzie sterowania robota. Można namierzyć kolejne 9 pozycji HOME.
Pozycja HOME musi spełniać następujące warunki:
Korzystna pozycja wyjściowa dla przebiegu programuKorzystna pozycja bezruchu. Robot w pozycji bezruchu nie powinien na przykład przeszkadzać.
8.6 Symbole w programie
Zmiana wiersza
Jeśli dany wiersz jest dłuższy niż szerokość okna, zostaje automatycznie podzielony. Zmiana wiersza zaznaczona jest przez czarną łamaną strzałkę.
20 Pozycja wyjściowa (HOME)22 Wiersz END
Wiersz programow
yOpis
Pierwszy ruch w programie KRL musi być ruchem PTP ze współrzędnymi kartezjańskimi. Zasada ta nie dotyczy podprogramów.
Ostrzeżenie!Jeśli pozycja HOME zostaje zmieniona, zmiana ta dotyczy wszystkich programów, w których pozycja ta jest używana. Skutkiem takiej zmiany mogą być obrażenia ciała i szkody materialne.
91 / 12820.07.2006 KSS-AD-EA-5x pl
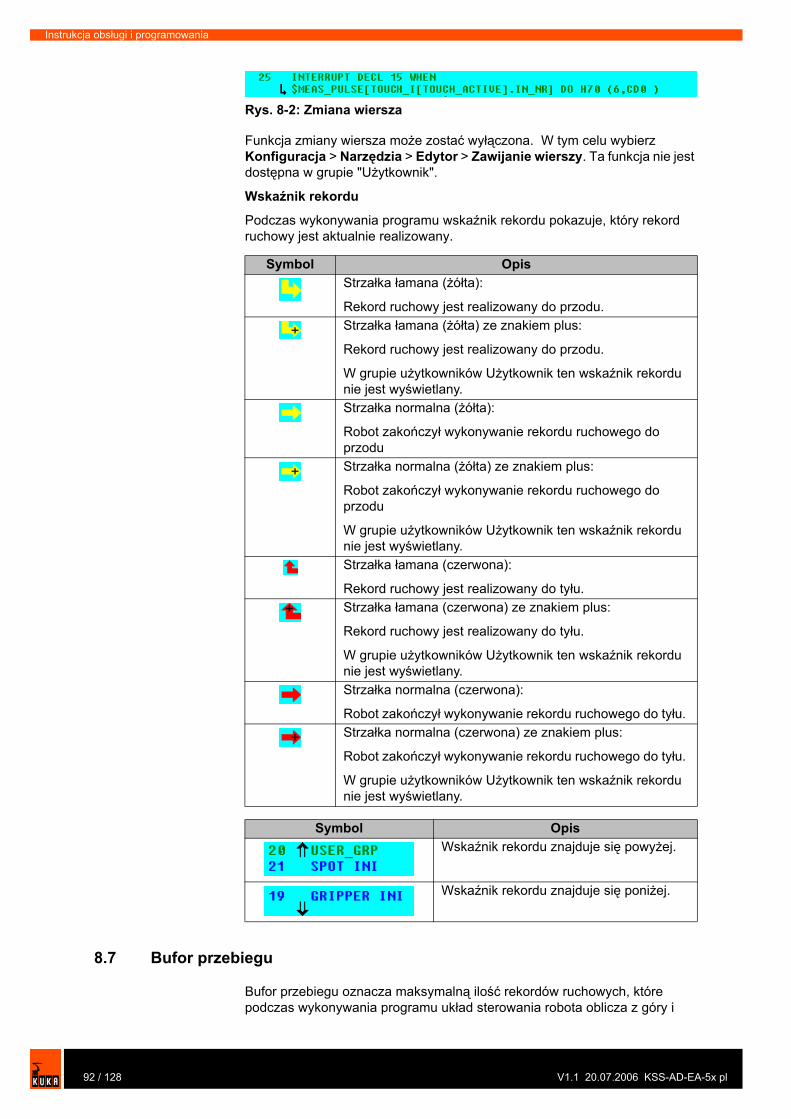
Instrukcja obsługi i programowania
Funkcja zmiany wiersza może zostać wyłączona. W tym celu wybierz Konfiguracja > Narzędzia > Edytor > Zawijanie wierszy. Ta funkcja nie jest dostępna w grupie "Użytkownik".
Wskaźnik rekordu
Podczas wykonywania programu wskaźnik rekordu pokazuje, który rekord ruchowy jest aktualnie realizowany.
8.7 Bufor przebiegu
Bufor przebiegu oznacza maksymalną ilość rekordów ruchowych, które podczas wykonywania programu układ sterowania robota oblicza z góry i
Rys. 8-2: Zmiana wiersza
Symbol OpisStrzałka łamana (żółta):
Rekord ruchowy jest realizowany do przodu. Strzałka łamana (żółta) ze znakiem plus:
Rekord ruchowy jest realizowany do przodu.
W grupie użytkowników Użytkownik ten wskaźnik rekordu nie jest wyświetlany. Strzałka normalna (żółta):
Robot zakończył wykonywanie rekordu ruchowego do przoduStrzałka normalna (żółta) ze znakiem plus:
Robot zakończył wykonywanie rekordu ruchowego do przodu
W grupie użytkowników Użytkownik ten wskaźnik rekordu nie jest wyświetlany. Strzałka łamana (czerwona):
Rekord ruchowy jest realizowany do tyłu. Strzałka łamana (czerwona) ze znakiem plus:
Rekord ruchowy jest realizowany do tyłu.
W grupie użytkowników Użytkownik ten wskaźnik rekordu nie jest wyświetlany. Strzałka normalna (czerwona):
Robot zakończył wykonywanie rekordu ruchowego do tyłu. Strzałka normalna (czerwona) ze znakiem plus:
Robot zakończył wykonywanie rekordu ruchowego do tyłu.
W grupie użytkowników Użytkownik ten wskaźnik rekordu nie jest wyświetlany.
Symbol OpisWskaźnik rekordu znajduje się powyżej.
Wskaźnik rekordu znajduje się poniżej.
92 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
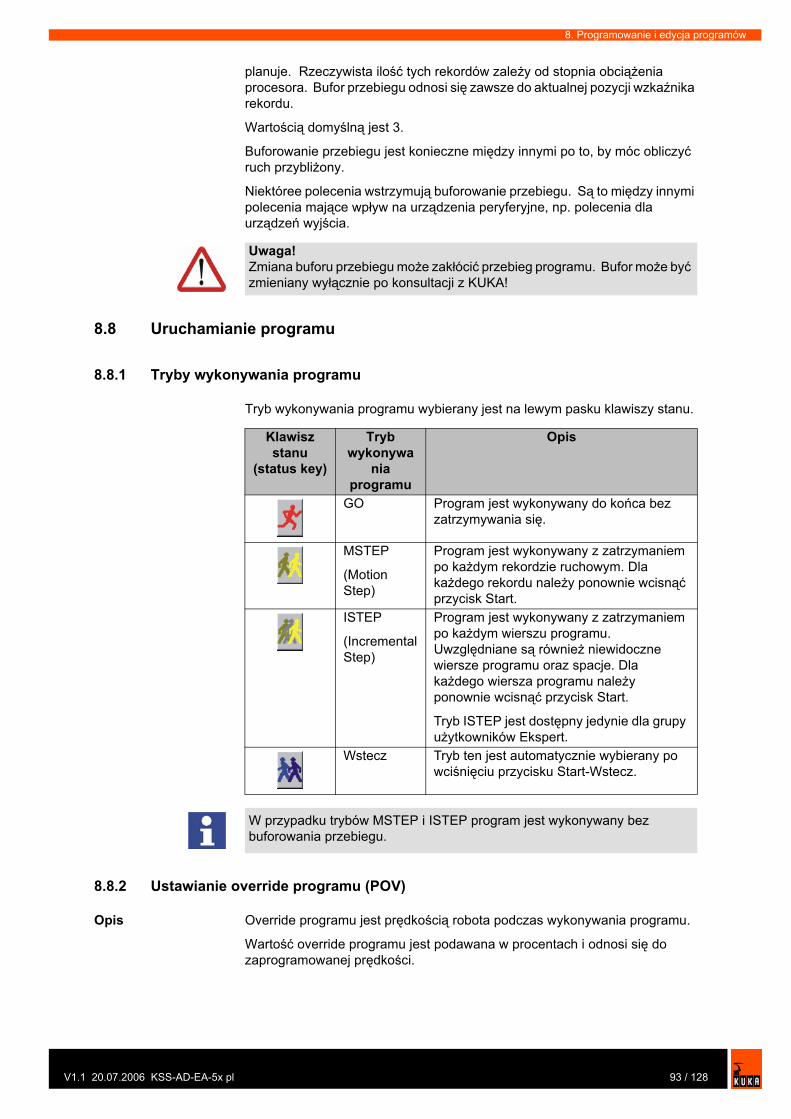
V1.1
8. Programowanie i edycja programów
planuje. Rzeczywista ilość tych rekordów zależy od stopnia obciążenia procesora. Bufor przebiegu odnosi się zawsze do aktualnej pozycji wzkaźnika rekordu.
Wartością domyślną jest 3.
Buforowanie przebiegu jest konieczne między innymi po to, by móc obliczyć ruch przybliżony.
Niektóree polecenia wstrzymują buforowanie przebiegu. Są to między innymi polecenia mające wpływ na urządzenia peryferyjne, np. polecenia dla urządzeń wyjścia.
8.8 Uruchamianie programu
8.8.1 Tryby wykonywania programu
Tryb wykonywania programu wybierany jest na lewym pasku klawiszy stanu.
8.8.2 Ustawianie override programu (POV)
Opis Override programu jest prędkością robota podczas wykonywania programu.
Wartość override programu jest podawana w procentach i odnosi się do zaprogramowanej prędkości.
Uwaga!Zmiana buforu przebiegu może zakłócić przebieg programu. Bufor może być zmieniany wyłącznie po konsultacji z KUKA!
Klawisz stanu
(status key)
Tryb wykonywa
nia programu
Opis
GO Program jest wykonywany do końca bez zatrzymywania się.
MSTEP
(Motion Step)
Program jest wykonywany z zatrzymaniem po każdym rekordzie ruchowym. Dla każdego rekordu należy ponownie wcisnąć przycisk Start.
ISTEP
(Incremental Step)
Program jest wykonywany z zatrzymaniem po każdym wierszu programu. Uwzględniane są również niewidoczne wiersze programu oraz spacje. Dla każdego wiersza programu należy ponownie wcisnąć przycisk Start.
Tryb ISTEP jest dostępny jedynie dla grupy użytkowników Ekspert.
Wstecz Tryb ten jest automatycznie wybierany po wciśnięciu przycisku Start-Wstecz.
W przypadku trybów MSTEP i ISTEP program jest wykonywany bez buforowania przebiegu.
93 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Przygotowanie Określanie stopniowania override programu:Wybierz Konfiguracja > Przesuwanie ręczne (Override) > Kroki POV.
Sposób postępowania
W prawym pasku klawiszy stanu zwiększ lub zmniejsz parametr override. Klawisz stanu pokazuje aktualną wartość override w procentach.
8.8.3 Uruchomienie programu do przodu (ręcznie)
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Postępowanie 1. Wybierz tryb wykonywania programu (>>> 8.8.1 "Tryby wykonywania programu" strona 93).
2. Wciśnij przycisk zatwierdzający i przytrzymaj, aż wyświetlony zostanie
pasek stanu (tzn. napędy gotowe). 3. Wykonaj przesuw SAK:
Wciśnij klawisz Start i przytrzymaj, aż w oknie komunikatów pojawi się "SAK osiągnięte". Robot zatrzymuje się.
4. Wciśnij i przytrzymaj klawisz Start.Program jest wykonywany, w zależności od wybranego trybu z przerwami lub bez.
8.8.4 Uruchamianie programu do przodu (tryb automatyczny)
Wymagania Program jest wybrany. Tryb roboczy Automatika (nie Automatyka zewn.)
Sposób postępowania
1. W lewym pasku klawiszy stanu wybierz tryb wykonywania programu GO:
2. Wciśnij przycisk Napędy WŁĄCZ.
W trybie roboczym T1 maksymalna prędkość wynosi 250mm/s bez względu na ustawioną wartość.
Aktywny ZnaczenieNie Parametr override można zmieniać z dokładnością
do 1%. Tak Stopniowanie 100%, 75%, 50%, 30%, 10%, 3%,
1%, 0%
Ostrzeżenie!Przesuw SAK odbywa się zawsze na bezpośrednim odcinku od pozycji aktualnej do docelowej. Zwróć uwagę na znajdujące się na tym odcinku przeszkody, aby uniknąć kolizji. Prędkość przesuwu SAK jest automatycznie redukowana.
Aby zatrzymać program uruchomiony w trybie ręcznym zwolnij przycisk Start.
94 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
8. Programowanie i edycja programów
3. Przeprowadź przesuw SAK: Wciśnij i przytrzymaj przycisk Start, aż pojawi się okno komunikatu "SAK osiągnięty". Robot zatrzymuje się.
4. Wciśnij przycisk Start. Program zostaje uruchomiony.
8.8.5 Uruchamianie programu do tyłu
Opis Podczas przesuwu wstecz robot zatrzymuje się przy każdym punkcie. Przybliżenie jest niemożliwe.
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Trzymaj wciśnięty przycisk potwierdzający i zaczekaj, aż pasek statusu
pokaże (tj. napędy gotowe). 2. Przeprowadź przesuw SAK:
Wciśnij i przytrzymaj przycisk Start, aż pojawi się okno komunikatu "SAK osiągnięty". Robot zatrzymuje się.
3. Wciśnij przycisk Start-Wstecz. Automatycznie wybrany jest tryb wykonywania programu "Wstecz":
4. Dla każdego rekordu ruchowego wciskaj ponownie przycisk Start-Wstecz.
8.8.6 Zresetuj programu
Opis Aby przerwany program rozpocząć ponownie od początku należy go zresetować. W ten sposób program przywracany jest do stanu sprzed rozpoczęcia wykonywania.
Wymagania Program jest wybrany.
Sposób postępowania
Wybierz Edycja > Zresetuj programu.
Ostrzeżenie!Przesuw SAK odbywa się zawsze na bezpośrednim odcinku od pozycji aktualnej do docelowej. Zwróć uwagę na znajdujące się na tym odcinku przeszkody, aby uniknąć kolizji. Prędkość przesuwu SAK jest automatycznie redukowana.
Aby zatrzymać program uruchomiony w trybie automatycznym naciśnij przycisk STOP.
Szczegółowe działania układu sterowania robota podczas przesuwu wstecz uzależnione są od indywidualnej dla każdego klienta konfiguracji w pliku C:\KRC\UTIL\BW_INI.EXE.
Ostrzeżenie!Przesuw SAK odbywa się zawsze na bezpośrednim odcinku od pozycji aktualnej do docelowej. Zwróć uwagę na znajdujące się na tym odcinku przeszkody, aby uniknąć kolizji. Prędkość przesuwu SAK jest automatycznie redukowana.
95 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
8.8.7 Uruchamianie trybu pracy Automatyka zewnętrzna
Wymagania Tryb pracy T1 lub T2Skonfigurowano wejścia/wyjścia dla trybu Automatyki zewnętrznej oraz program CELL.SRC.
Sposób postępowania
1. Wybierz w Nawigatorze program CELL.SRC. (Znajduje się w folderze "R1".)
2. Ustaw override programu na 100%. (Jest to ustawienie zalecane. Jeśli trzeba, można ustawić inną wartość.)
3. Przeprowadź przesuw SAK: Wciśnij i przytrzymaj przycisk potwierdzający. Następnie wciśnij i przytrzymaj przycisk Start, aż pojawi się okno komunikatu "SAK osiągnięty".
4. Ustaw przełącznik trybów roboczych na "Automatyka zewnętrzna". 5. Uruchom program przy pomocy nadrzędnego układu sterowania (SPS).
8.9 Programowanie ruchów
8.9.1 Rodzaje ruchu
Przegląd Zaprogramować można następujące rodzaje ruchu:
Ruch Point-to-Point (PTP) (>>> 8.9.2 "Programowanie ruchu PTP" strona 98)Ruch liniowy (LIN) (>>> 8.9.4 "Programowanie ruchu LIN" strona 99)Ruch po łuku (CIRC) (>>> 8.9.6 "Programowanie ruchu CIRC" strona 100)
Ruch LIN i CIRC są również opisywane łącznie pojęciem ruchów CP ("Continuous Path").
Punkt początkowy danego ruchu jest zawsze punktem docelowym ruchu poprzedniego lub, jeśli robot nie porusza się, jest to aktualna pozycja robota.
Ruch PTP Robot prowadzi TCP do punktu celowego po torze najszybszym. Tor najszybszy nie jest z reguły torem najkrótszym, czyli nie jest linią prostą. Ponieważ osie robota poruszają się obrotowo, tory po łuku są wykonywane szybciej niż tory proste.
Dokładnego przebiegu ruchu nie da się przewidzieć.
Ostrzeżenie!Przesuw SAK odbywa się zawsze na bezpośrednim odcinku od pozycji aktualnej do docelowej. Zwróć uwagę na znajdujące się na tym odcinku przeszkody, aby uniknąć kolizji. Prędkość przesuwu SAK jest automatycznie redukowana.
Aby zatrzymać program uruchomiony w trybie automatycznym naciśnij przycisk STOP.
96 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
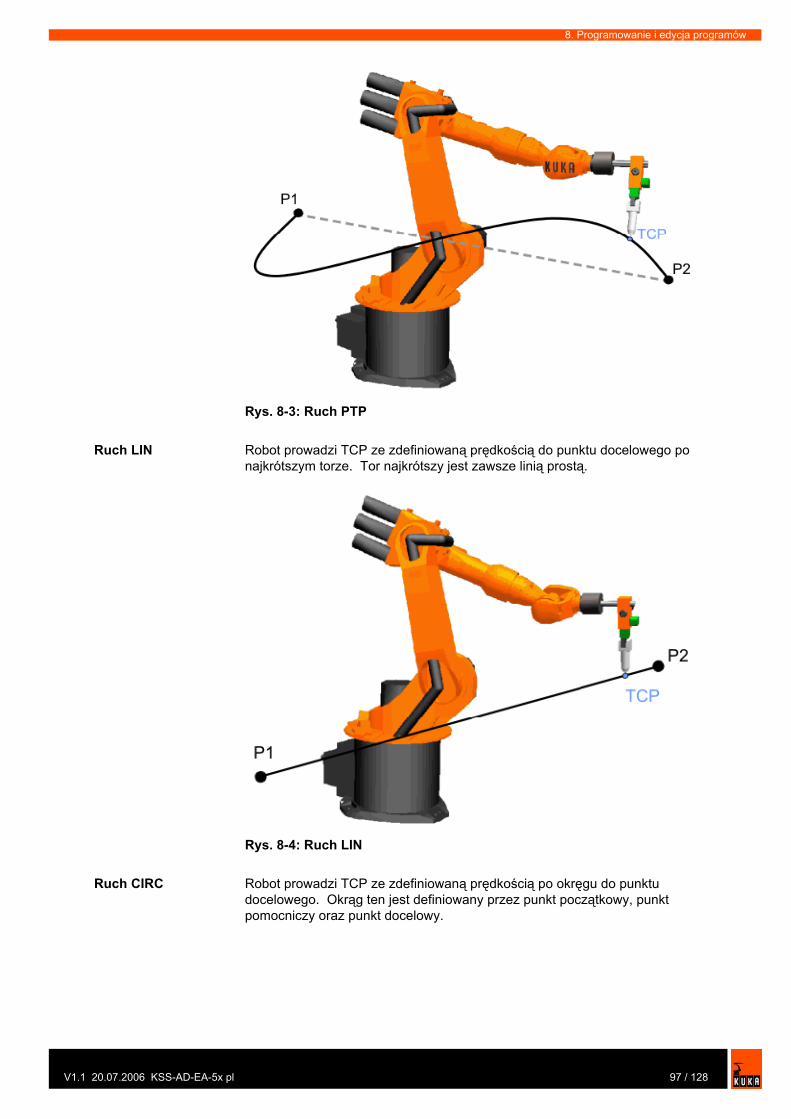
V1.1
8. Programowanie i edycja programów
Ruch LIN Robot prowadzi TCP ze zdefiniowaną prędkością do punktu docelowego po najkrótszym torze. Tor najkrótszy jest zawsze linią prostą.
Ruch CIRC Robot prowadzi TCP ze zdefiniowaną prędkością po okręgu do punktu docelowego. Okrąg ten jest definiowany przez punkt początkowy, punkt pomocniczy oraz punkt docelowy.
Rys. 8-3: Ruch PTP
Rys. 8-4: Ruch LIN
97 / 12820.07.2006 KSS-AD-EA-5x pl
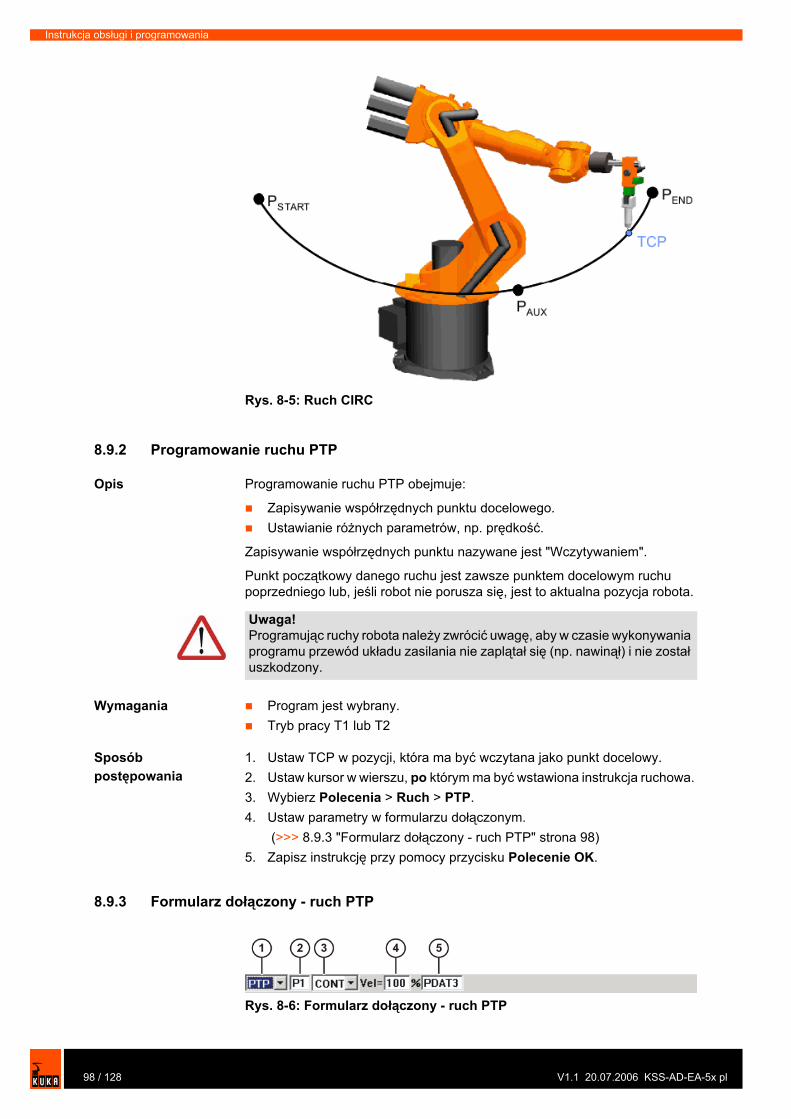
Instrukcja obsługi i programowania
8.9.2 Programowanie ruchu PTP
Opis Programowanie ruchu PTP obejmuje:
Zapisywanie współrzędnych punktu docelowego. Ustawianie różnych parametrów, np. prędkość.
Zapisywanie współrzędnych punktu nazywane jest "Wczytywaniem".
Punkt początkowy danego ruchu jest zawsze punktem docelowym ruchu poprzedniego lub, jeśli robot nie porusza się, jest to aktualna pozycja robota.
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw TCP w pozycji, która ma być wczytana jako punkt docelowy. 2. Ustaw kursor w wierszu, po którym ma być wstawiona instrukcja ruchowa. 3. Wybierz Polecenia > Ruch > PTP.4. Ustaw parametry w formularzu dołączonym.
(>>> 8.9.3 "Formularz dołączony - ruch PTP" strona 98)5. Zapisz instrukcję przy pomocy przycisku Polecenie OK.
8.9.3 Formularz dołączony - ruch PTP
Rys. 8-5: Ruch CIRC
Uwaga!Programując ruchy robota należy zwrócić uwagę, aby w czasie wykonywania programu przewód układu zasilania nie zaplątał się (np. nawinął) i nie został uszkodzony.
Rys. 8-6: Formularz dołączony - ruch PTP
98 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
8. Programowanie i edycja programów
8.9.4 Programowanie ruchu LIN
Opis Programowanie ruchu LIN obejmuje:
Zapisywanie współrzędnych punktu docelowego. Ustawianie różnych parametrów, np. prędkość.
Zapisywanie współrzędnych punktu nazywane jest "Wczytywaniem".
Punkt początkowy danego ruchu jest zawsze punktem docelowym ruchu poprzedniego lub, jeśli robot nie porusza się, jest to aktualna pozycja robota.
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw TCP w pozycji, która ma być wczytana jako punkt docelowy. 2. Ustaw kursor w wierszu, po którym ma być wstawiona instrukcja ruchowa. 3. Wybierz Polecenia > Ruch > LIN.4. Ustaw parametry w formularzu dołączonym.
(>>> 8.9.5 "Formularz dołączony - ruch LIN" strona 100)5. Zapisz instrukcję przy pomocy przycisku Polecenie OK.
Poz. Opis Zakres wartości1 Rodzaj ruchu PTP, LIN, CIRC2 Nazwa punktu docelowego
System przypisuje nazwę automatycznie. Nazwę tę można nadpisać.
Aby edytować dane punktu umieść kursor w polu. Otwiera się odpowiednie okno opcji.
(>>> 8.9.8 "Okno opcji ramki" strona 101)
(>>> 8.11 "Nazwy w formularzach" strona 112)
3 CONT: Punkt docelowy jest namierzony z przybliżeniem[pusty]: Punkt docelowy jest precyzyjnie najeżdżany.
CONT, [pusty]
4 Prędkość 0% … 100%5 Nazwa rekordu danych ruchowych
System przypisuje nazwę automatycznie. Nazwę tę można nadpisać.
Aby edytować dane ruchowe umieść kursor w polu. Otwiera się odpowiednie okno opcji.
(>>> 8.9.9 "Okno opcji - parametry ruchu (ruch PTP)" strona 102)
(>>> 8.11 "Nazwy w formularzach" strona 112)
Uwaga!Programując ruchy robota należy zwrócić uwagę, aby w czasie wykonywania programu przewód układu zasilania nie zaplątał się (np. nawinął) i nie został uszkodzony.
99 / 12820.07.2006 KSS-AD-EA-5x pl
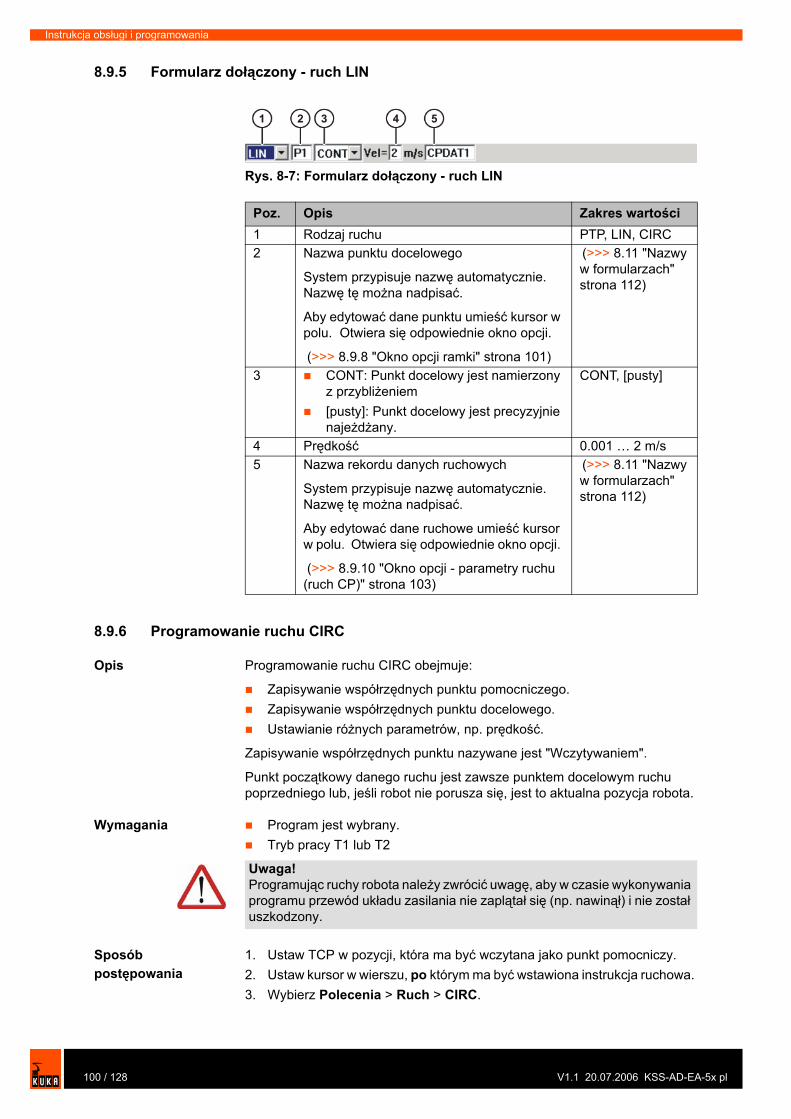
Instrukcja obsługi i programowania
8.9.5 Formularz dołączony - ruch LIN
8.9.6 Programowanie ruchu CIRC
Opis Programowanie ruchu CIRC obejmuje:
Zapisywanie współrzędnych punktu pomocniczego. Zapisywanie współrzędnych punktu docelowego. Ustawianie różnych parametrów, np. prędkość.
Zapisywanie współrzędnych punktu nazywane jest "Wczytywaniem".
Punkt początkowy danego ruchu jest zawsze punktem docelowym ruchu poprzedniego lub, jeśli robot nie porusza się, jest to aktualna pozycja robota.
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw TCP w pozycji, która ma być wczytana jako punkt pomocniczy. 2. Ustaw kursor w wierszu, po którym ma być wstawiona instrukcja ruchowa. 3. Wybierz Polecenia > Ruch > CIRC.
Rys. 8-7: Formularz dołączony - ruch LIN
Poz. Opis Zakres wartości1 Rodzaj ruchu PTP, LIN, CIRC2 Nazwa punktu docelowego
System przypisuje nazwę automatycznie. Nazwę tę można nadpisać.
Aby edytować dane punktu umieść kursor w polu. Otwiera się odpowiednie okno opcji.
(>>> 8.9.8 "Okno opcji ramki" strona 101)
(>>> 8.11 "Nazwy w formularzach" strona 112)
3 CONT: Punkt docelowy jest namierzony z przybliżeniem[pusty]: Punkt docelowy jest precyzyjnie najeżdżany.
CONT, [pusty]
4 Prędkość 0.001 … 2 m/s5 Nazwa rekordu danych ruchowych
System przypisuje nazwę automatycznie. Nazwę tę można nadpisać.
Aby edytować dane ruchowe umieść kursor w polu. Otwiera się odpowiednie okno opcji.
(>>> 8.9.10 "Okno opcji - parametry ruchu (ruch CP)" strona 103)
(>>> 8.11 "Nazwy w formularzach" strona 112)
Uwaga!Programując ruchy robota należy zwrócić uwagę, aby w czasie wykonywania programu przewód układu zasilania nie zaplątał się (np. nawinął) i nie został uszkodzony.
100 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
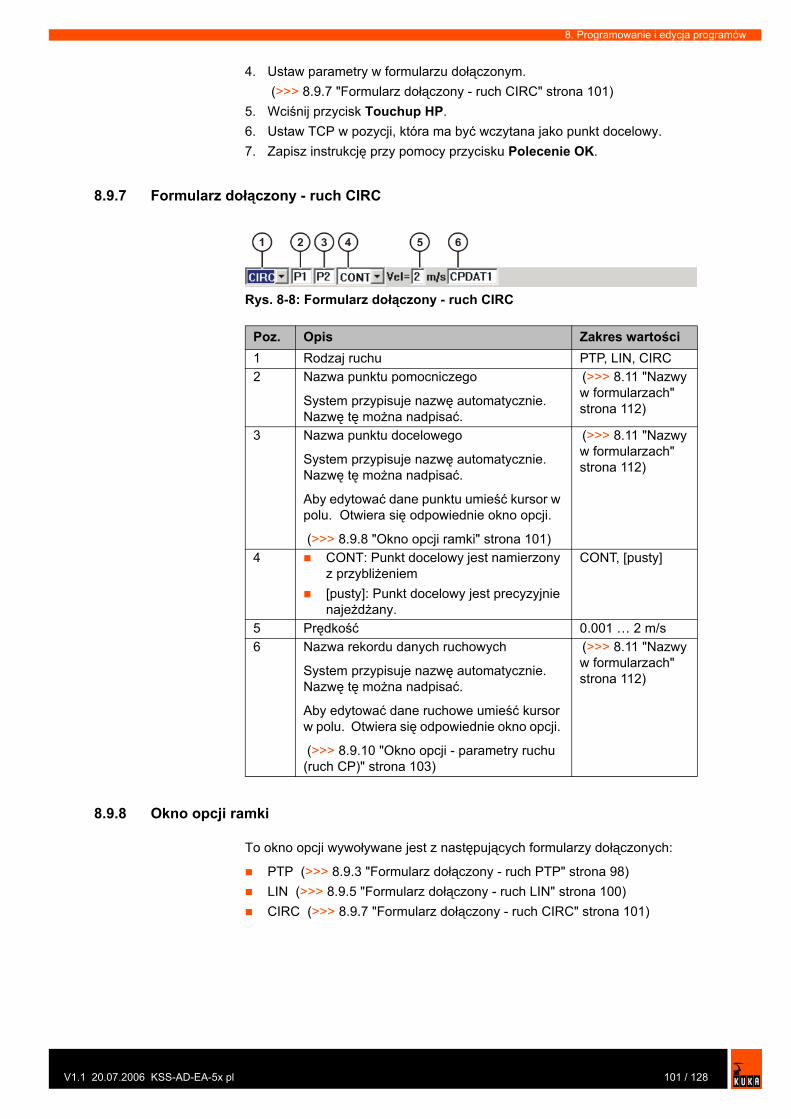
V1.1
8. Programowanie i edycja programów
4. Ustaw parametry w formularzu dołączonym. (>>> 8.9.7 "Formularz dołączony - ruch CIRC" strona 101)
5. Wciśnij przycisk Touchup HP. 6. Ustaw TCP w pozycji, która ma być wczytana jako punkt docelowy. 7. Zapisz instrukcję przy pomocy przycisku Polecenie OK.
8.9.7 Formularz dołączony - ruch CIRC
8.9.8 Okno opcji ramki
To okno opcji wywoływane jest z następujących formularzy dołączonych:
PTP (>>> 8.9.3 "Formularz dołączony - ruch PTP" strona 98)LIN (>>> 8.9.5 "Formularz dołączony - ruch LIN" strona 100)CIRC (>>> 8.9.7 "Formularz dołączony - ruch CIRC" strona 101)
Rys. 8-8: Formularz dołączony - ruch CIRC
Poz. Opis Zakres wartości1 Rodzaj ruchu PTP, LIN, CIRC2 Nazwa punktu pomocniczego
System przypisuje nazwę automatycznie. Nazwę tę można nadpisać.
(>>> 8.11 "Nazwy w formularzach" strona 112)
3 Nazwa punktu docelowego
System przypisuje nazwę automatycznie. Nazwę tę można nadpisać.
Aby edytować dane punktu umieść kursor w polu. Otwiera się odpowiednie okno opcji.
(>>> 8.9.8 "Okno opcji ramki" strona 101)
(>>> 8.11 "Nazwy w formularzach" strona 112)
4 CONT: Punkt docelowy jest namierzony z przybliżeniem[pusty]: Punkt docelowy jest precyzyjnie najeżdżany.
CONT, [pusty]
5 Prędkość 0.001 … 2 m/s6 Nazwa rekordu danych ruchowych
System przypisuje nazwę automatycznie. Nazwę tę można nadpisać.
Aby edytować dane ruchowe umieść kursor w polu. Otwiera się odpowiednie okno opcji.
(>>> 8.9.10 "Okno opcji - parametry ruchu (ruch CP)" strona 103)
(>>> 8.11 "Nazwy w formularzach" strona 112)
101 / 12820.07.2006 KSS-AD-EA-5x pl
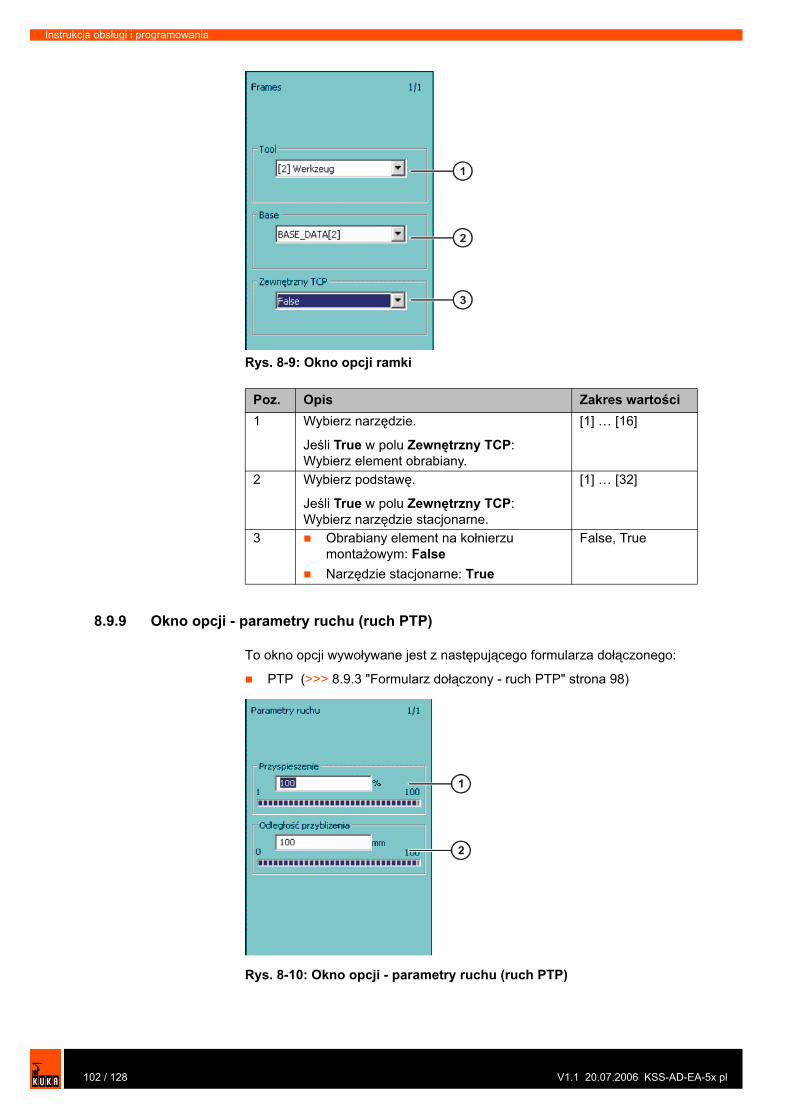
Instrukcja obsługi i programowania
8.9.9 Okno opcji - parametry ruchu (ruch PTP)
To okno opcji wywoływane jest z następującego formularza dołączonego:
PTP (>>> 8.9.3 "Formularz dołączony - ruch PTP" strona 98)
Rys. 8-9: Okno opcji ramki
Poz. Opis Zakres wartości1 Wybierz narzędzie.
Jeśli True w polu Zewnętrzny TCP: Wybierz element obrabiany.
[1] … [16]
2 Wybierz podstawę.
Jeśli True w polu Zewnętrzny TCP: Wybierz narzędzie stacjonarne.
[1] … [32]
3 Obrabiany element na kołnierzu montażowym: FalseNarzędzie stacjonarne: True
False, True
Rys. 8-10: Okno opcji - parametry ruchu (ruch PTP)
102 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
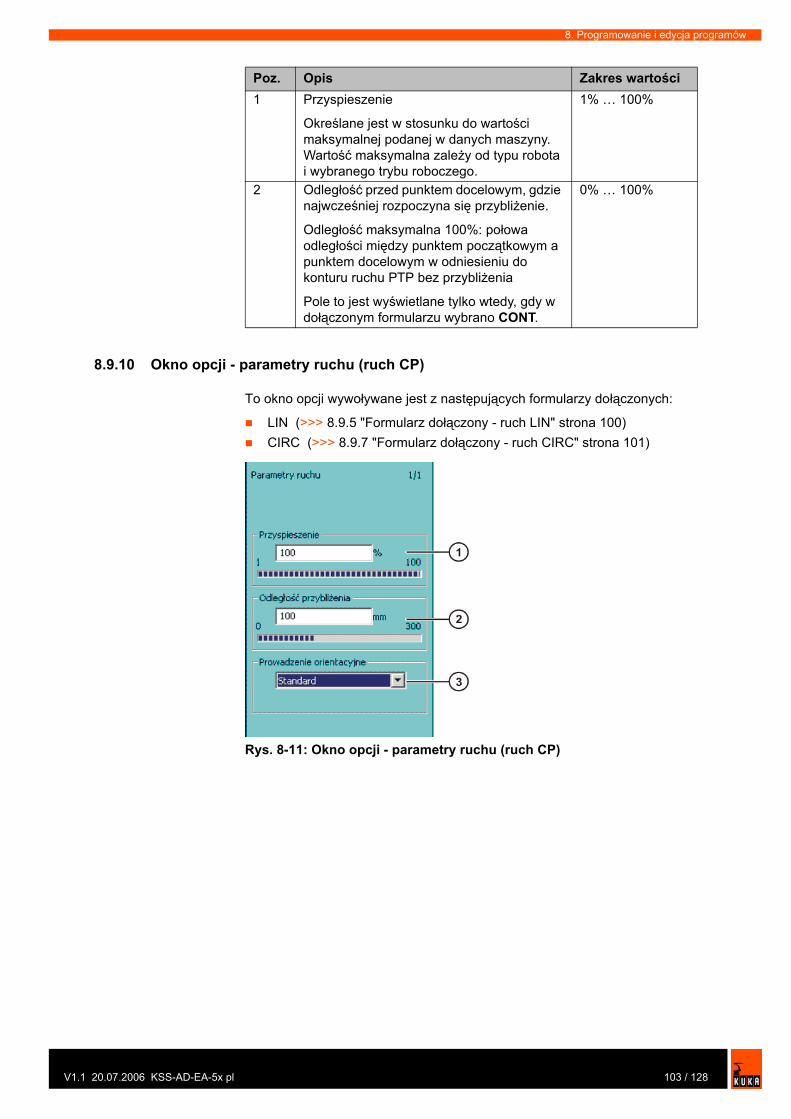
V1.1
8. Programowanie i edycja programów
8.9.10 Okno opcji - parametry ruchu (ruch CP)
To okno opcji wywoływane jest z następujących formularzy dołączonych:
LIN (>>> 8.9.5 "Formularz dołączony - ruch LIN" strona 100)CIRC (>>> 8.9.7 "Formularz dołączony - ruch CIRC" strona 101)
Poz. Opis Zakres wartości1 Przyspieszenie
Określane jest w stosunku do wartości maksymalnej podanej w danych maszyny. Wartość maksymalna zależy od typu robota i wybranego trybu roboczego.
1% … 100%
2 Odległość przed punktem docelowym, gdzie najwcześniej rozpoczyna się przybliżenie.
Odległość maksymalna 100%: połowa odległości między punktem początkowym a punktem docelowym w odniesieniu do konturu ruchu PTP bez przybliżenia
Pole to jest wyświetlane tylko wtedy, gdy w dołączonym formularzu wybrano CONT.
0% … 100%
Rys. 8-11: Okno opcji - parametry ruchu (ruch CP)
103 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
8.9.11 Zmiana parametrów ruchu
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw kursor w wierszu z instrukcją, którą chcesz zmienić. 2. Wciśnij przycisk Zmień. Otwiera się formularz dołączony do instrukcji. 3. Zmień parametry. 4. Zapisz zmiany wciskając przycisk Polecenie OK.
8.9.12 Zmiana wczytanego punktu
Opis Współrzędne wczytanego punktu mogą być zmieniane. W tym celu należy najechać żądaną nową pozycję i nadpisać stary punkt nową pozycją.
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Najedź TCP żądaną pozycję. 2. Ustaw kursor w wierszu z instrukcją, którą chcesz zmienić. 3. Wciśnij przycisk Zmień. Otwiera się formularz dołączony do instrukcji. 4. Dla ruchów PTP i LIN: Wciśnij przycisk Touch Up, aby zapisać aktualną
pozycję TCP jako nowy punkt docelowy.Dla ruchów CIRC:
Wciśnij przycisk Touch Up, aby zapisać aktualną pozycję TCP jako nowy punkt pomocniczy.Lub wciśnij przycisk Touch Up, aby zapisać aktualną pozycję TCP jako nowy punkt docelowy.
5. Potwierdź wciskając Tak.
Poz. Opis Zakres wartości1 Przyspieszenie
Określane jest w stosunku do wartości maksymalnej podanej w danych maszyny. Wartość maksymalna zależy od typu robota i wybranego trybu roboczego.
1% … 100%
2 Odległość przed punktem docelowym, gdzie najwcześniej rozpoczyna się przybliżenie.
Odległość ta może wynosić maksymalnie połowę odległości między punktem początkowym a docelowym. Jeśli wprowadzona zostanie większa wartość, będzie on ignorowana a na jej miejscu zostanie użyta wartość maksymalna.
Pole to jest wyświetlane tylko wtedy, gdy w dołączonym formularzu wybrano CONT.
0 mm … 300 mm
3 Wybierz prowadzenie orientacji
(>>> 8.9.14 "Prowadzenie orientacji" strona 106)
StandardowoPTP ręcznyStałe prowadzenie orientacji
104 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
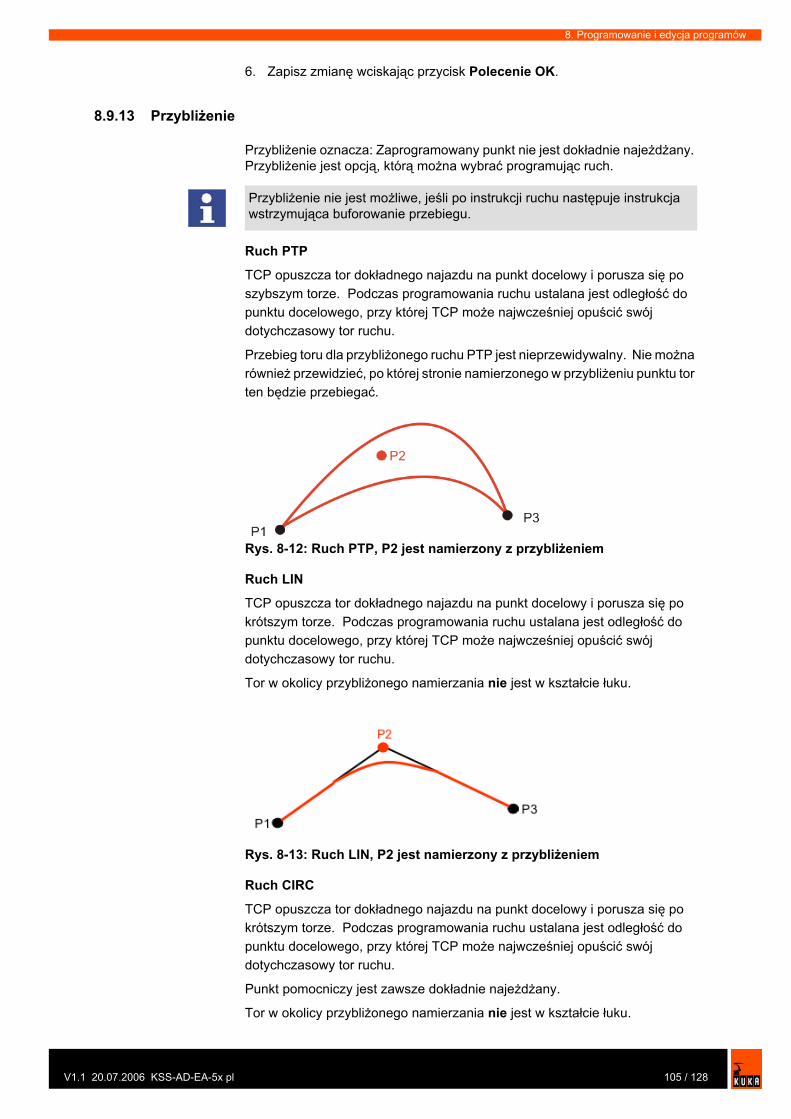
V1.1
8. Programowanie i edycja programów
6. Zapisz zmianę wciskając przycisk Polecenie OK.
8.9.13 Przybliżenie
Przybliżenie oznacza: Zaprogramowany punkt nie jest dokładnie najeżdżany. Przybliżenie jest opcją, którą można wybrać programując ruch.
Ruch PTP
TCP opuszcza tor dokładnego najazdu na punkt docelowy i porusza się po szybszym torze. Podczas programowania ruchu ustalana jest odległość do punktu docelowego, przy której TCP może najwcześniej opuścić swój dotychczasowy tor ruchu.
Przebieg toru dla przybliżonego ruchu PTP jest nieprzewidywalny. Nie można również przewidzieć, po której stronie namierzonego w przybliżeniu punktu tor ten będzie przebiegać.
Ruch LIN
TCP opuszcza tor dokładnego najazdu na punkt docelowy i porusza się po krótszym torze. Podczas programowania ruchu ustalana jest odległość do punktu docelowego, przy której TCP może najwcześniej opuścić swój dotychczasowy tor ruchu.
Tor w okolicy przybliżonego namierzania nie jest w kształcie łuku.
Ruch CIRC
TCP opuszcza tor dokładnego najazdu na punkt docelowy i porusza się po krótszym torze. Podczas programowania ruchu ustalana jest odległość do punktu docelowego, przy której TCP może najwcześniej opuścić swój dotychczasowy tor ruchu.
Punkt pomocniczy jest zawsze dokładnie najeżdżany.
Tor w okolicy przybliżonego namierzania nie jest w kształcie łuku.
Przybliżenie nie jest możliwe, jeśli po instrukcji ruchu następuje instrukcja wstrzymująca buforowanie przebiegu.
Rys. 8-12: Ruch PTP, P2 jest namierzony z przybliżeniem
Rys. 8-13: Ruch LIN, P2 jest namierzony z przybliżeniem
105 / 12820.07.2006 KSS-AD-EA-5x pl

Instrukcja obsługi i programowania
8.9.14 Prowadzenie orientacji
Przegląd Narzędzie może mieć różną orientację w punkcie początkowym i docelowym. Orientacja w punkcie początkowym może przejść w różny sposób w orientację w punkcie docelowym. Podczas programowania ruchu CP należy dokonać wyboru sposobu.
Dostępne są opcje:
StandardowoPTP ręcznyStałe prowadzenie orientacji
Przy ruchach CIRC: Orientacja w punkcie pomocniczym nie jest uwzględniana.
Opis Standardowo
Orientacja narzędzia zmienia się podczas ruchu w sposób ciągły.
Orientacja zostaje zmieniona poprzez obracanie i przechylanie wokół TCP.
PTP ręczny
Orientacja narzędzia zmienia się podczas ruchu w sposób ciągły.
Ruch CP jest dzielony przez układ sterowania robota na kilka mniejszych ruchów PTP. Dzięki temu podczas ręcznego PTP nie może wystąpić żadna osobliwość. Tym niemniej robot może nieznacznie odejść od swojego toru. Ręczny PTP nie nadaje się z tego powodu do prac, przy których robot musi precyzyjnie utrzymywać swój tor ruchu, np. podczas spawania laserowego.
Rys. 8-14: Ruch CIRC, PEND jest namierzony z przybliżeniem.
Jeśli robot w trybie Standard popadnie w osobliwość, wybierz tryb Ręczny PTP.Jeśli w trybie Standard wystąpi osobliwość, a tor musi być jednak dokładnie utrzymany: Namierz na nowo punkt początkowy i/lub docelowy. Ustaw orientację w taki sposób, aby nie występowała żadna osobliwość.
106 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
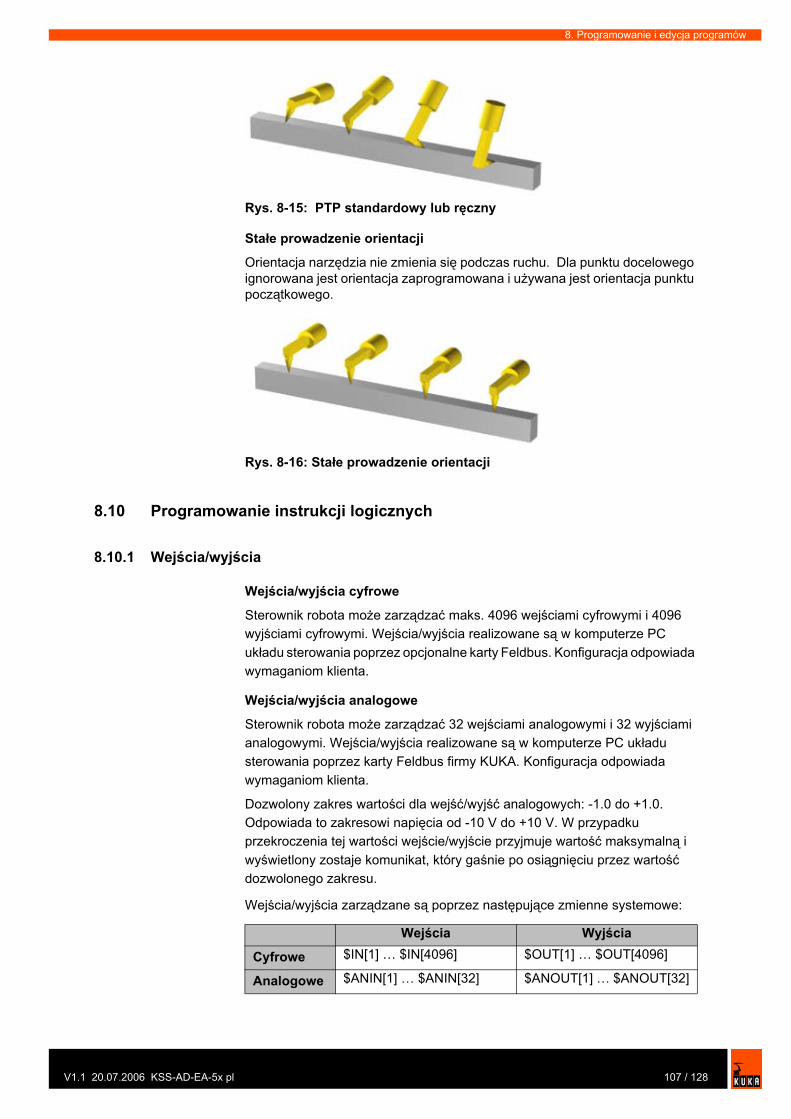
V1.1
8. Programowanie i edycja programów
Stałe prowadzenie orientacji
Orientacja narzędzia nie zmienia się podczas ruchu. Dla punktu docelowego ignorowana jest orientacja zaprogramowana i używana jest orientacja punktu początkowego.
8.10 Programowanie instrukcji logicznych
8.10.1 Wejścia/wyjścia
Wejścia/wyjścia cyfrowe
Sterownik robota może zarządzać maks. 4096 wejściami cyfrowymi i 4096 wyjściami cyfrowymi. Wejścia/wyjścia realizowane są w komputerze PC układu sterowania poprzez opcjonalne karty Feldbus. Konfiguracja odpowiada wymaganiom klienta.
Wejścia/wyjścia analogowe
Sterownik robota może zarządzać 32 wejściami analogowymi i 32 wyjściami analogowymi. Wejścia/wyjścia realizowane są w komputerze PC układu sterowania poprzez karty Feldbus firmy KUKA. Konfiguracja odpowiada wymaganiom klienta.
Dozwolony zakres wartości dla wejść/wyjść analogowych: -1.0 do +1.0. Odpowiada to zakresowi napięcia od -10 V do +10 V. W przypadku przekroczenia tej wartości wejście/wyjście przyjmuje wartość maksymalną i wyświetlony zostaje komunikat, który gaśnie po osiągnięciu przez wartość dozwolonego zakresu.
Wejścia/wyjścia zarządzane są poprzez następujące zmienne systemowe:
Rys. 8-15: PTP standardowy lub ręczny
Rys. 8-16: Stałe prowadzenie orientacji
Wejścia Wyjścia
Cyfrowe $IN[1] … $IN[4096] $OUT[1] … $OUT[4096]
Analogowe $ANIN[1] … $ANIN[32] $ANOUT[1] … $ANOUT[32]
107 / 12820.07.2006 KSS-AD-EA-5x pl
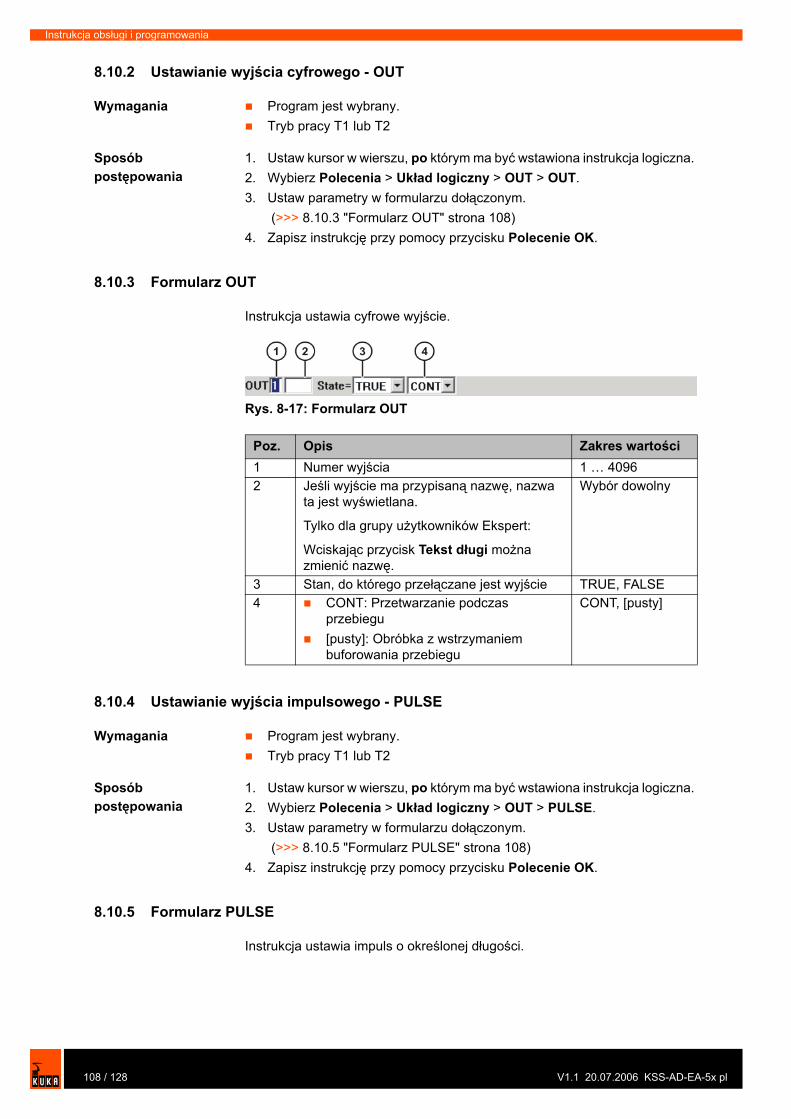
Instrukcja obsługi i programowania
8.10.2 Ustawianie wyjścia cyfrowego - OUT
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw kursor w wierszu, po którym ma być wstawiona instrukcja logiczna. 2. Wybierz Polecenia > Układ logiczny > OUT > OUT.3. Ustaw parametry w formularzu dołączonym.
(>>> 8.10.3 "Formularz OUT" strona 108)4. Zapisz instrukcję przy pomocy przycisku Polecenie OK.
8.10.3 Formularz OUT
Instrukcja ustawia cyfrowe wyjście.
8.10.4 Ustawianie wyjścia impulsowego - PULSE
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw kursor w wierszu, po którym ma być wstawiona instrukcja logiczna. 2. Wybierz Polecenia > Układ logiczny > OUT > PULSE.3. Ustaw parametry w formularzu dołączonym.
(>>> 8.10.5 "Formularz PULSE" strona 108)4. Zapisz instrukcję przy pomocy przycisku Polecenie OK.
8.10.5 Formularz PULSE
Instrukcja ustawia impuls o określonej długości.
Rys. 8-17: Formularz OUT
Poz. Opis Zakres wartości1 Numer wyjścia 1 … 40962 Jeśli wyjście ma przypisaną nazwę, nazwa
ta jest wyświetlana.
Tylko dla grupy użytkowników Ekspert:
Wciskając przycisk Tekst długi można zmienić nazwę.
Wybór dowolny
3 Stan, do którego przełączane jest wyjście TRUE, FALSE4 CONT: Przetwarzanie podczas
przebiegu[pusty]: Obróbka z wstrzymaniem buforowania przebiegu
CONT, [pusty]
108 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
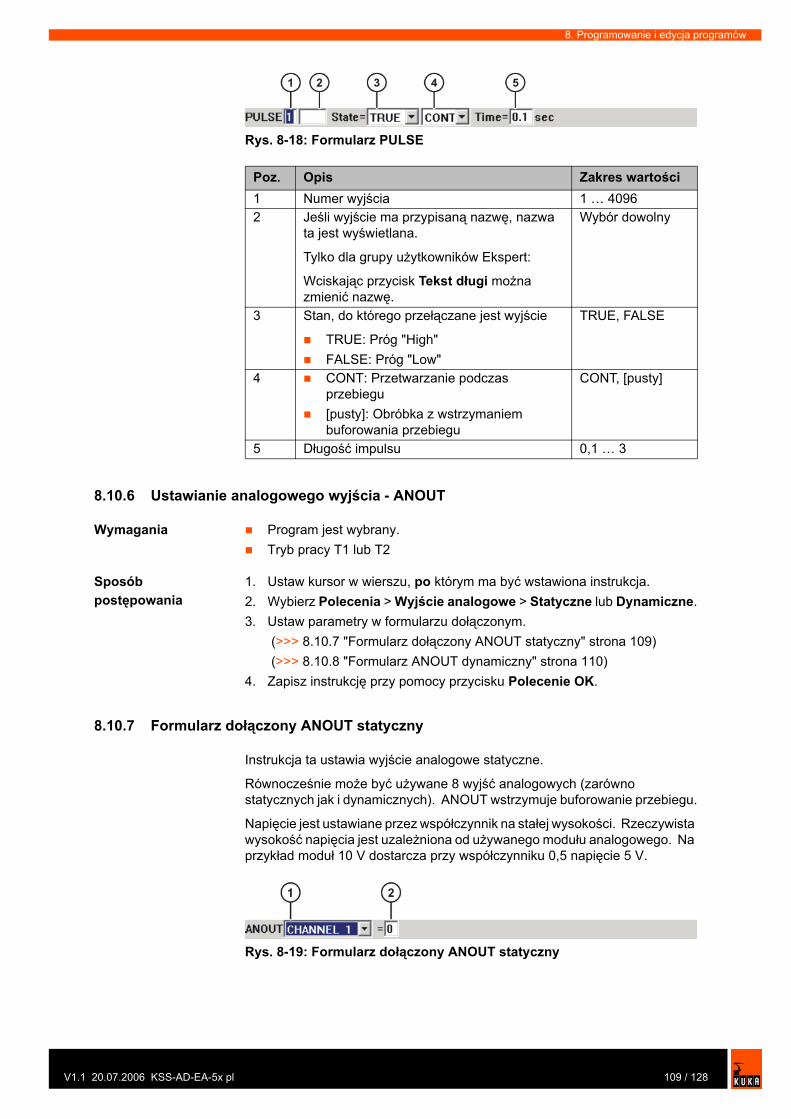
V1.1
8. Programowanie i edycja programów
8.10.6 Ustawianie analogowego wyjścia - ANOUT
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw kursor w wierszu, po którym ma być wstawiona instrukcja. 2. Wybierz Polecenia > Wyjście analogowe > Statyczne lub Dynamiczne.3. Ustaw parametry w formularzu dołączonym.
(>>> 8.10.7 "Formularz dołączony ANOUT statyczny" strona 109) (>>> 8.10.8 "Formularz ANOUT dynamiczny" strona 110)
4. Zapisz instrukcję przy pomocy przycisku Polecenie OK.
8.10.7 Formularz dołączony ANOUT statyczny
Instrukcja ta ustawia wyjście analogowe statyczne.
Równocześnie może być używane 8 wyjść analogowych (zarówno statycznych jak i dynamicznych). ANOUT wstrzymuje buforowanie przebiegu.
Napięcie jest ustawiane przez współczynnik na stałej wysokości. Rzeczywista wysokość napięcia jest uzależniona od używanego modułu analogowego. Na przykład moduł 10 V dostarcza przy współczynniku 0,5 napięcie 5 V.
Rys. 8-18: Formularz PULSE
Poz. Opis Zakres wartości1 Numer wyjścia 1 … 40962 Jeśli wyjście ma przypisaną nazwę, nazwa
ta jest wyświetlana.
Tylko dla grupy użytkowników Ekspert:
Wciskając przycisk Tekst długi można zmienić nazwę.
Wybór dowolny
3 Stan, do którego przełączane jest wyjście
TRUE: Próg "High"FALSE: Próg "Low"
TRUE, FALSE
4 CONT: Przetwarzanie podczas przebiegu[pusty]: Obróbka z wstrzymaniem buforowania przebiegu
CONT, [pusty]
5 Długość impulsu 0,1 … 3
Rys. 8-19: Formularz dołączony ANOUT statyczny
109 / 12820.07.2006 KSS-AD-EA-5x pl
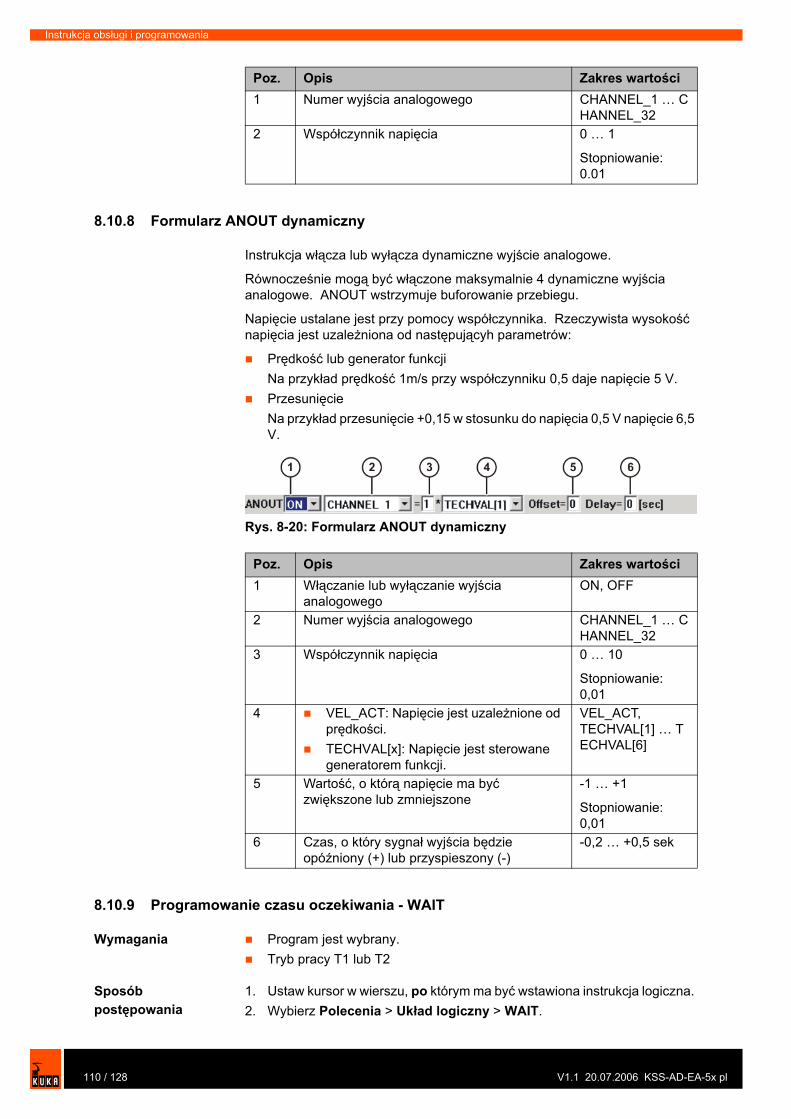
Instrukcja obsługi i programowania
8.10.8 Formularz ANOUT dynamiczny
Instrukcja włącza lub wyłącza dynamiczne wyjście analogowe.
Równocześnie mogą być włączone maksymalnie 4 dynamiczne wyjścia analogowe. ANOUT wstrzymuje buforowanie przebiegu.
Napięcie ustalane jest przy pomocy współczynnika. Rzeczywista wysokość napięcia jest uzależniona od następującyh parametrów:
Prędkość lub generator funkcjiNa przykład prędkość 1m/s przy współczynniku 0,5 daje napięcie 5 V. PrzesunięcieNa przykład przesunięcie +0,15 w stosunku do napięcia 0,5 V napięcie 6,5 V.
8.10.9 Programowanie czasu oczekiwania - WAIT
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw kursor w wierszu, po którym ma być wstawiona instrukcja logiczna. 2. Wybierz Polecenia > Układ logiczny > WAIT.
Poz. Opis Zakres wartości1 Numer wyjścia analogowego CHANNEL_1 … C
HANNEL_322 Współczynnik napięcia 0 … 1
Stopniowanie: 0.01
Rys. 8-20: Formularz ANOUT dynamiczny
Poz. Opis Zakres wartości1 Włączanie lub wyłączanie wyjścia
analogowegoON, OFF
2 Numer wyjścia analogowego CHANNEL_1 … CHANNEL_32
3 Współczynnik napięcia 0 … 10
Stopniowanie: 0,01
4 VEL_ACT: Napięcie jest uzależnione od prędkości.TECHVAL[x]: Napięcie jest sterowane generatorem funkcji.
VEL_ACT, TECHVAL[1] … TECHVAL[6]
5 Wartość, o którą napięcie ma być zwiększone lub zmniejszone
-1 … +1
Stopniowanie: 0,01
6 Czas, o który sygnał wyjścia będzie opóźniony (+) lub przyspieszony (-)
-0,2 … +0,5 sek
110 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
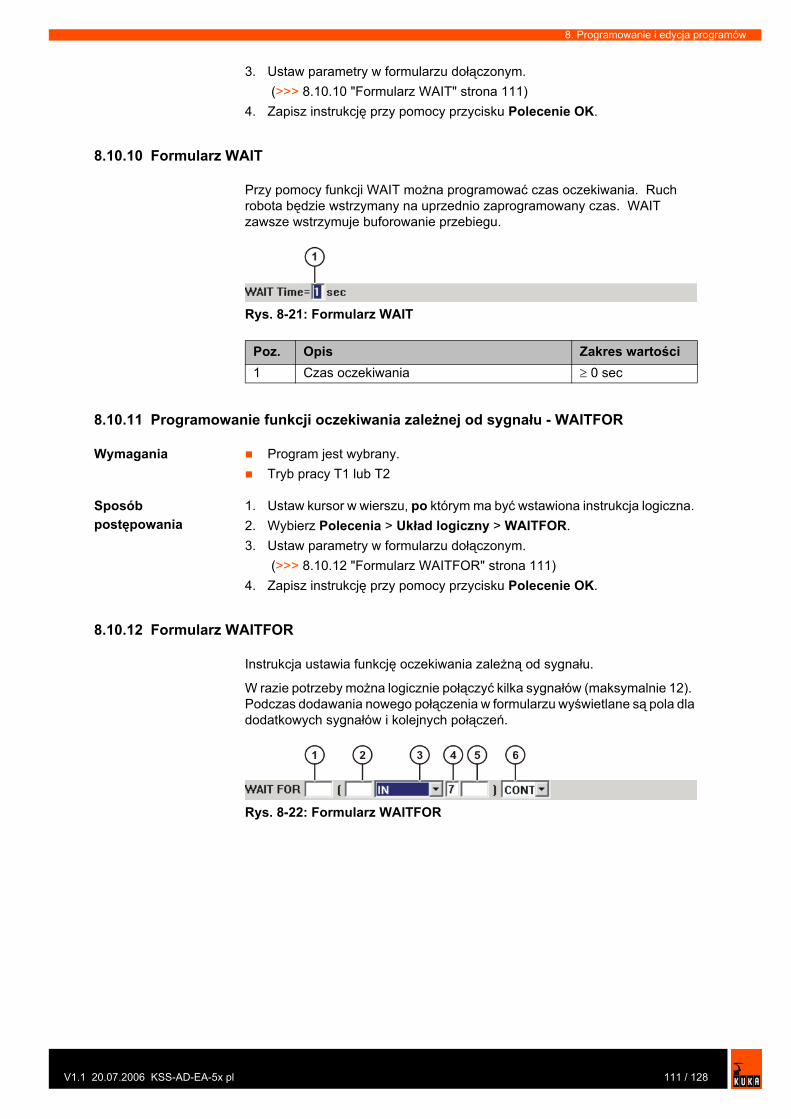
V1.1
8. Programowanie i edycja programów
3. Ustaw parametry w formularzu dołączonym. (>>> 8.10.10 "Formularz WAIT" strona 111)
4. Zapisz instrukcję przy pomocy przycisku Polecenie OK.
8.10.10 Formularz WAIT
Przy pomocy funkcji WAIT można programować czas oczekiwania. Ruch robota będzie wstrzymany na uprzednio zaprogramowany czas. WAIT zawsze wstrzymuje buforowanie przebiegu.
8.10.11 Programowanie funkcji oczekiwania zależnej od sygnału - WAITFOR
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw kursor w wierszu, po którym ma być wstawiona instrukcja logiczna. 2. Wybierz Polecenia > Układ logiczny > WAITFOR.3. Ustaw parametry w formularzu dołączonym.
(>>> 8.10.12 "Formularz WAITFOR" strona 111)4. Zapisz instrukcję przy pomocy przycisku Polecenie OK.
8.10.12 Formularz WAITFOR
Instrukcja ustawia funkcję oczekiwania zależną od sygnału.
W razie potrzeby można logicznie połączyć kilka sygnałów (maksymalnie 12). Podczas dodawania nowego połączenia w formularzu wyświetlane są pola dla dodatkowych sygnałów i kolejnych połączeń.
Rys. 8-21: Formularz WAIT
Poz. Opis Zakres wartości1 Czas oczekiwania ≥ 0 sec
Rys. 8-22: Formularz WAITFOR
111 / 12820.07.2006 KSS-AD-EA-5x pl
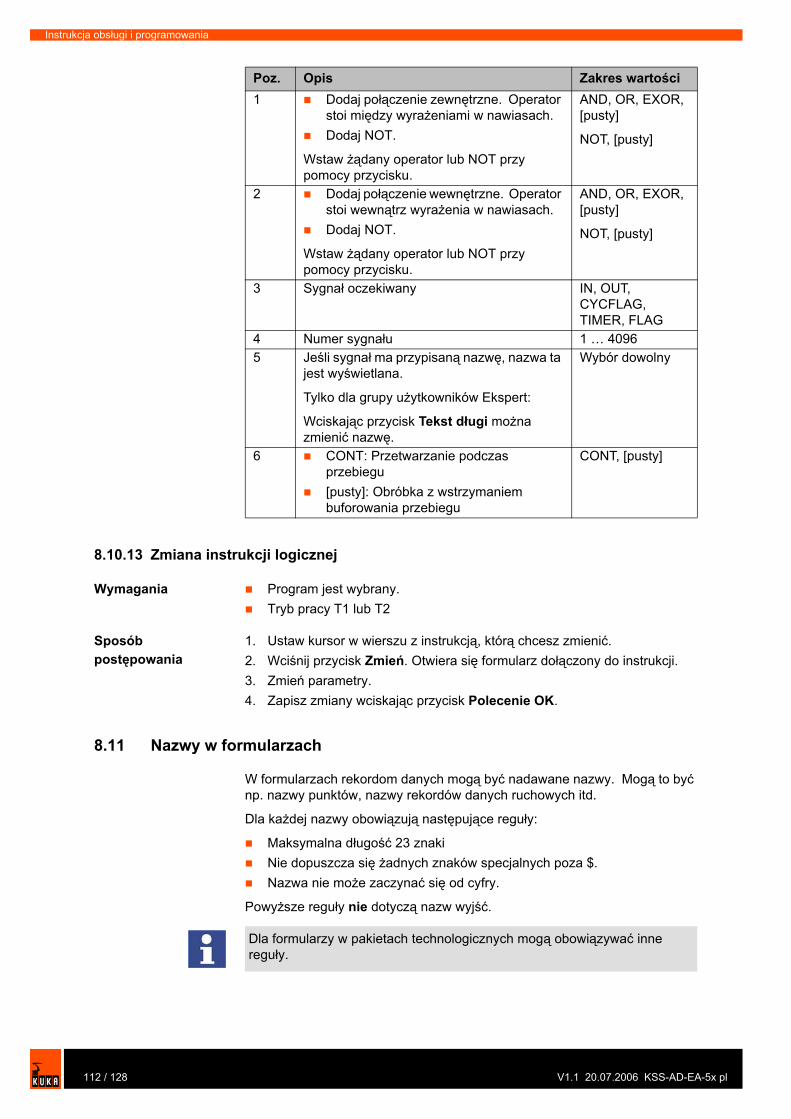
Instrukcja obsługi i programowania
8.10.13 Zmiana instrukcji logicznej
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw kursor w wierszu z instrukcją, którą chcesz zmienić. 2. Wciśnij przycisk Zmień. Otwiera się formularz dołączony do instrukcji. 3. Zmień parametry. 4. Zapisz zmiany wciskając przycisk Polecenie OK.
8.11 Nazwy w formularzach
W formularzach rekordom danych mogą być nadawane nazwy. Mogą to być np. nazwy punktów, nazwy rekordów danych ruchowych itd.
Dla każdej nazwy obowiązują następujące reguły:
Maksymalna długość 23 znakiNie dopuszcza się żadnych znaków specjalnych poza $.Nazwa nie może zaczynać się od cyfry.
Powyższe reguły nie dotyczą nazw wyjść.
Poz. Opis Zakres wartości1 Dodaj połączenie zewnętrzne. Operator
stoi między wyrażeniami w nawiasach.Dodaj NOT.
Wstaw żądany operator lub NOT przy pomocy przycisku.
AND, OR, EXOR, [pusty]
NOT, [pusty]
2 Dodaj połączenie wewnętrzne. Operator stoi wewnątrz wyrażenia w nawiasach.Dodaj NOT.
Wstaw żądany operator lub NOT przy pomocy przycisku.
AND, OR, EXOR, [pusty]
NOT, [pusty]
3 Sygnał oczekiwany IN, OUT, CYCFLAG, TIMER, FLAG
4 Numer sygnału 1 … 40965 Jeśli sygnał ma przypisaną nazwę, nazwa ta
jest wyświetlana.
Tylko dla grupy użytkowników Ekspert:
Wciskając przycisk Tekst długi można zmienić nazwę.
Wybór dowolny
6 CONT: Przetwarzanie podczas przebiegu[pusty]: Obróbka z wstrzymaniem buforowania przebiegu
CONT, [pusty]
Dla formularzy w pakietach technologicznych mogą obowiązywać inne reguły.
112 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
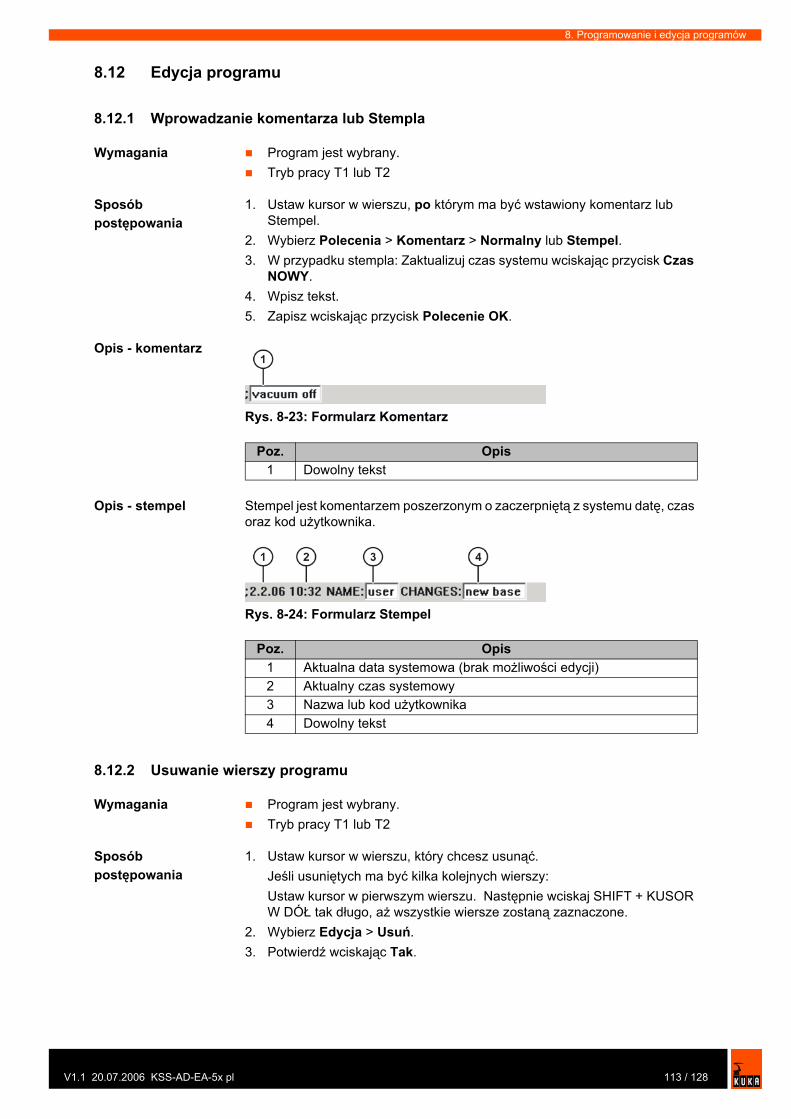
V1.1
8. Programowanie i edycja programów
8.12 Edycja programu
8.12.1 Wprowadzanie komentarza lub Stempla
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw kursor w wierszu, po którym ma być wstawiony komentarz lub Stempel.
2. Wybierz Polecenia > Komentarz > Normalny lub Stempel.3. W przypadku stempla: Zaktualizuj czas systemu wciskając przycisk Czas
NOWY.4. Wpisz tekst.5. Zapisz wciskając przycisk Polecenie OK.
Opis - komentarz
Opis - stempel Stempel jest komentarzem poszerzonym o zaczerpniętą z systemu datę, czas oraz kod użytkownika.
8.12.2 Usuwanie wierszy programu
Wymagania Program jest wybrany. Tryb pracy T1 lub T2
Sposób postępowania
1. Ustaw kursor w wierszu, który chcesz usunąć. Jeśli usuniętych ma być kilka kolejnych wierszy:Ustaw kursor w pierwszym wierszu. Następnie wciskaj SHIFT + KUSOR W DÓŁ tak długo, aż wszystkie wiersze zostaną zaznaczone.
2. Wybierz Edycja > Usuń.3. Potwierdź wciskając Tak.
Rys. 8-23: Formularz Komentarz
Poz. Opis1 Dowolny tekst
Rys. 8-24: Formularz Stempel
Poz. Opis1 Aktualna data systemowa (brak możliwości edycji)2 Aktualny czas systemowy3 Nazwa lub kod użytkownika4 Dowolny tekst
113 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
8.13 Drukowanie programu
Sposób postępowania
1. Zaznacz program w Nawigatorze. Można również zaznaczyć kilka programów.
2. Wybierz Plik > Drukuj > Aktualny wybór.
Jeśli usuwany jest wiersz programu zawierający instrukcję ruchową, nazwa punktu oraz jego współrzędne pozostają zachowane w pliku DAT. Punkt może być używany w innych instrukcjach ruchowych i nie trzeba go ponownie namierzać.
Usuwania wierszy nie da się cofnąć!
114 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
9. Komunikaty
9 Komunikaty
Szczegółowe informacje dotyczące komunikatów systemu znajdują się w pomocy online.
(>>> 5.5 "Korzystanie z pomocy online" strona 37)
115 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
116 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
10. Serwis KUKA
10 Serwis KUKA
10.1 Pomoc techniczna
Wstęp Dokumentacja firmy KUKA Robot Group zawiera informacje na temat eksploatacji i obsługi produktu oraz usuwania zakłóceń. W przypadku dalszych pytań, lokalny oddział firmy jest do Państwa dyspozycji.
Informacje Do opracowania pytania serwisowego są potrzebne następujące informacje:
Typ i numer seryjny robotaTyp i numer seryjny układu sterowaniaTyp i numer seryjny jednostki liniowej (opcja)Wersja oprogramowania systemowego KUKADodatkowe oprogramowanie lub modyfikacjeArchiwum oprogramowaniaDostępne aplikacjeDostępne osie dodatkowe (opcja)Opis problemu, czas, częstotliwość występowania usterki
10.2 Biuro obsługi klienta KUKA
Dostępność Biuro obsługi klienta KUKA jest dostępne w wielu krajach. Jesteśmy do Państwa dyspozycji!
Argentyna Ruben Costantini S.A. (Agentur)Luis Angel Huergo 13 20Parque Industrial2400 San Francisco (CBA)ArgentynaTel. +54 3564 421033Fax +54 3564 [email protected]
Australia Marand Precision Engineering Pty. Ltd. (Agentur)153 Keys RoadMoorabbinVictoria 31 89AustraliaTel. +61 3 8552-0600Fax +61 3 [email protected]
Usterki powodujące zatrzymanie produkcji należy zgłosić w ciągu jednej godziny do lokalnego oddziału firmy.
117 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Belgia KUKA Automatisering + Robots N.V.Centrum Zuid 10313530 HouthalenBelgiaTel. +32 11 516160Fax +32 11 [email protected]
Brazylia KUKA Roboter do Brasil Ltda.Avenida Franz Liszt, 80Parque Novo MundoJd. GuançăCEP 02151 900 Săo PauloSP BrazyliaTel. +55 11 69844900Fax +55 11 [email protected]
Chile Robotec S.A. (Agency)Santiago de ChileChileTel. +56 2 331-5951Fax +56 2 [email protected]
Chiny KUKA Flexible Manufacturing Equipment (Shanghai) Co., Ltd.Shanghai Qingpu Industrial ZoneNo. 502 Tianying Rd.201712 ShanghaiP.R. ChinaTel. +86 21 5922-8652Fax +86 21 [email protected]
Niemcy KUKA Roboter GmbHBlücherstr. 14486165 AugsburgNiemcyTel. +49 821 797-4000Fax +49 821 [email protected]
118 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
10. Serwis KUKA
Francja KUKA Automatisme + Robotique SASTechvallée6 Avenue du Parc91140 Villebon s/YvetteFrancjaTel. +33 1 6931-6600Fax +33 1 [email protected]
Indie Sieflex Robotics54, Industrial Estate, Ambattur600 058 ChennaiTamil NaduIndieTel. +91 6 241412Fax +91 26 [email protected]
Włochy KUKA Roboter Italia S.p.A.Via Pavia 9/a - int.610098 Rivoli (TO)WłochyTel. +39 011 959-5013Fax +39 011 [email protected]
Korea KUKA Robot Automation Korea, Co. Ltd.4 Ba 806 Sihwa Ind. ComplexSung-Gok Dong, Ansan CityKyunggi Do425-110KoreaTel. +82 31 496-9937 or -9938Fax +82 31 [email protected]
119 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Malezja KUKA Robot Automation Sdn BhdSouth East Asia Regional OfficeNo. 24, Jalan TPP 1/10Taman Industri Puchong47100 PuchongSelangorMalezjaTel. +60 3 8061-0613 or -0614Fax +60 3 [email protected]
Maksyk KUKA de Mexico S. de R.L. de C.V.Rio San Joaquin #339, Local 5Colonia Pensil SurC.P. 11490 Mexico D.F.MaksykTel. +52 55 5203-8407Fax +52 55 [email protected]
Norwegia KUKA Sveiseanlegg + RoboterBryggeveien 92821 GjövikNorwegiaTel. +47 61 133422Fax +47 61 [email protected]
Austria KUKA Roboter GmbHVertriebsbüro ÖsterreichRegensburger Strasse 9/14020 LinzAustriaTel. +43 732 784752Fax +43 732 [email protected]
Portugalia KUKA Sistemas de Automatización S.A.Rua do Alto da Guerra n° 50Armazém 042910 011 SetúbalPortugaliaTel. +351 21 238-8083Fax +351 21 [email protected]
120 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
10. Serwis KUKA
Rosja KUKA-VAZ EngineeringJushnoje Chaussee, 36 VAZ, PTO445633 TogliattiRosjaTel. +7 8482 391249 or 370564Fax +7 8482 [email protected]
Szwecja KUKA Svetsanläggningar + Robotar ABA. Odhners gata 15421 30 Västra FrölundaSzwecjaTel. +46 31 7266-200Fax +46 31 [email protected]
Szwajcaria KUKA Roboter Schweiz AGRiedstr. 78953 DietikonSzwajcariaTel. +41 44 74490-90Fax +41 44 [email protected]
Hiszpania KUKA Sistemas de Automatización S.A.Pol. IndustrialTorrent de la PasteraCarrer del Bages s/n08800 Vilanova i la Geltrú (Barcelona)HiszpaniaTel. +34 93 814-2353Fax +34 93 [email protected]
Republika Południowej Afryki
Jendamark Automation LTD (Agency)76a York RoadNorth End6000 Port ElizabethRepublika Południowej AfrykiTel. +27 41 391 4700Fax +27 41 373 3869www.jendamark.co.za
121 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Tajwan KUKA Robot Automation Taiwan Co., Ltd.136, Section 2, Huanjung E. RoadJungli City, TaoyuanTaiwan 320Tel. +886 3 4371902Fax +886 3 [email protected]
Tajlandia KUKA Robot Automation (M)Sdn BhdThailand Officec/o Maccall System Co. Ltd.49/9-10 Soi Kingkaew 30 Kingkaew RoadTt. Rachatheva, A. BangpliSamutprakarn10540 ThailandTel. +66 2 7502737Fax +66 2 [email protected]
Węgry KUKA Robotics Hungaria Kft.Fö út 1402335 TaksonyWęgryTel. +36 24 501609Fax +36 24 [email protected]
USA KUKA Robotics Corp.22500 Key DriveClinton Township48036 MichiganUSATel. +1 866 8735852Fax +1 586 [email protected]
Wielka Brytania KUKA Automation + RoboticsHereward RiseHalesowenB62 8ANWielka BrytaniaTel. +44 121 585-0800Fax +44 121 [email protected]
122 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
Index
Index
Symbole$ANIN 107$ANOUT 107$IN 107$OUT 107
Cyfry73/23/EWG 1389/336/EWG 1397/23/WE 2698/37/WE 12
AAdministrator 39Akcesoria 9ALT 30ANOUT 109ARCHIVE.ZIP 57Archiwizacja danych 57Archiwizowanie 56AUT 19, 40AUT EXT 19, 40Automatyka 19, 40Automatyka zewnętrzna 19, 40Awaria 17
BBezpieczeństwo 11Bezpieczeństwo sieci 24Bezwładność masy 84BIOS 55Biuro obsługi klienta KUKA 117Blok klawiszy numerycznych 29, 31Blokada oddzielających urządzeń zabezpieczających 16Błędne hamowanie 23Bufor przebiegu 92BW_INI.EXE 95
CCELL.SRC 96Ciężar 84Continuous Path 96Czas eksploatacji 55, 56Czas oczekiwania 110Czujnik zegarowy 62, 67Czynności pielęgnacyjne 26Czyszczenie 26
DDane maszynowe 55, 56Dane maszyny 60Dane obciążenia 83Dekalibracja 69Deklaracja producenta 12, 13Deklaracja zgodności z normami WE 12Dokumentacja, system robota 7
Drukowanie programu 114Drzwi ochronne 14Duże/małe litery 36Dyrektywa "Kompatybilność elektromagnetyczna" 13Dyrektywa "Maszyny" 12Dyrektywa "Niskie napięcia" 13Dyrektywa "Urządzenia ciśnieniowe" 26Dyskietka 56
EEdycja programu 113Elektroniczny czujnik pomiarowy 62EMT 62ESC 15
FFiltr 88Firewall 24Funkcja oczekiwania, zależna od sygnału 111Funkcja WYŁĄCZENIA AWARYJNEGO 25
GGO 93Grupa użytkowników 39
HHamowanie, w pobliżu toru 12Hamowanie, zgodne z przebiegiem toru 11Hand-Override 43HOV 43
IImpuls 108Incremental Step 93Informacja dot. bezpieczeństwa 12Integrator systemów 12, 21Interfejs graficzny 33Interpreter submitów 36Interrupty 54ISTEP 93
JJasność 59Język 59
KKalibracja 61KCP 9, 23, 29Klawiatura 29, 30Klawisz Enter 29Klawisz ESC 29Klawisz Start 29, 32Klawisz Start-Wstecz 29Klawisz STOP 29Klawisz wyboru okna 29Klawisze kierunkowe 29
123 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Klawisze menu 29, 33Klawisze programowe 29, 33Klawisze ruchowe 44Klawisze stanu 29, 33Komentarz 113Komunikaty 34, 115Konfigurator KR C 57Konserwacja 25Kontrast 59Kontrola poprawności działania 24KUKA Control Panel 29KUKA Customer Support 55KUKA.HMI 9, 33KUKA.Load 84KUKA.Load Detect 84KUKA.SafeRobot 21
LLista plików 87Logiczny układ bezpieczeństwa 15Lokalne WYŁĄCZENIE AWARYJNE 16
MMechaniczne ograniczniki krańcowe 19Mechaniczny ogranicznik zakresu osi 20Mechaniczny punkt zerowy 61Mechanizm swobodnego obrotu 20Menu kontekstowe 88Metoda 2-punktowa ABC 73Metoda 3-punktowa 76Metoda 4-punktowa XYZ 70Metoda ABC World 72Metoda pośrednia 77Metoda referencyjna XYZ 71Metody kalibracji 62Miejsce ustawienia 13Monitorowanie zakresu roboczego 49Motion Step 93MSTEP 93
NNagłówek 87Napędy WŁ 29Napędy WŁ. 16Napędy WYŁ 29Napędy WYŁ. 16Napięcie 52, 107, 110Napięcie oporowe 12Naprawa 25Nawigator 87Nazwa, komputer PC układu sterowania 55Nazwa, robot 55, 56Nazwa, skaner antywirusowy 56NUM 30Numer seryjny 56
OObciążenie 83Obciążenie całkowite 83Obciążenie dodatkowe 83
Obciążenie elementem obrabianym 83Obciążenie narzędziem 83Obciążenie podłoża 13Obciążenie stropu 13Obciążenie ściany 13Obsługa 39Ochrona antywirusowa 24Ochrona operatora 15, 16Ogólne środki bezpieczeństwa 23Ogranicznik zakresu osi 20Ogrodzenia ochronne 14Okno główne 34Okno komunikatów 34Okno opcji 34Opcje 9Operator 39Opis produktu 9Opis systemu robota 9Oprogramowanie 9Osie dodatkowe 50, 55OUT 108Override programu 93Oznaczenia 12Oznaczenie CE 12
PPakiety technologiczne 9, 56, 112Pamięć 55Pasek statusu 36Pierwsza kalibracja 65Pisownia dużych/małych liter 31Point to Point 96Pole list 35Pole wprowadzania danych 35Pole wyboru 35Pomiar narzędzia 69Pomiar podstawy 75Pomiar, element obrabiany 78Pomiar, narzędzia 69Pomiar, narzędzie stacjonarne 78Pomiar, podstawa 75Pomiar, zewnętrzny TCP 78Pomoc 37Pomoc online 37Pomoc techniczna 117POV 93Pozycja "Awaria" 19Pozycja HOME 91Pozycja przedkalibracyjna 63Pozycja rzeczywista 50Pozycja transportowa 23Prędkość 43, 93Prędkość zredukowana 15Programator 9, 29Programista 39Programowane wyłączniki krańcowe 69Programowanie 24Programowy wyłącznik krańcowy 15, 20Prowadzenie orientacji 104, 106Przeciążenie 23
124 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl
V1.1
Index
Przeciwwaga 26Przegląd urządzeń zabezpieczających 15Przełącznik trybów roboczych 18, 29, 39Przesunięcie 63, 65, 110Przesuw wstecz 95Przesuw, kartezjański 47Przesuwanie, kartezyjskie 42, 44Przesuwanie, ręczne 42Przesuwanie, w odniesieniu do osi 42, 44Przewody łączące 9Przybliżenie 103, 104, 105Przycisk WYŁĄCZENIA AWARYJNYEGO 15, 16, 17Przycisk zatwierdzający 15, 16, 17, 18, 32Przyciski radiowe 35Przyciski ruchowe 42Przyrost 48Przyrostowy przesuw ręczny 47Przywracanie danych 58PULSE 108Punkt ciężkości 84Punkt pomocniczy 97
RReakcje powodujące zatrzymanie systemu 11Regulator 35Robot 9, 14Roboty paletujące 75Rodzaje ruchu 96Ruch CIRC 97, 100Ruch CP 96Ruch LIN 97, 99Ruch PTP 96, 98
SSerwis, KUKA Roboter 117SHIFT 31Skaner antywirusowy 56Składowanie 27SpaceMouse 29, 42, 44, 46, 47Sprzęt, informacje 56SSB-GUI 29Stempel 113STOP 0 11, 15STOP 1 11, 15STOP 2 11Strefa bezpieczeństwa 13, 14Strefa robocza 13, 14Struktura folderów 87Substancje niebezpieczne 26SYM 31Symulacja 13Symulacja wejścia/wyjścia 51System robota 9System robota, informacje 55
TT1 19, 40T2 19, 40Tabliczka znamionowa 32, 60
TCP 69Test 1 19, 40Test 2 19, 40Tool Center Point 69Tor hamowania 14Transport 23Tryb automatyczny 25Tryb dominujący 46Tryb impulsowy 15, 19Tryb wykonywania programu 93Tryby robocze 15, 16, 39Typ, robot 55Typ, układ sterowania robota 55
UUkład monitorowania zakresu osi 20Układ sterowania robota 9, 24Układ współrzędnych BASE 41, 75Układ współrzędnych FLANGE 69układ współrzędnych FLANGE 42Układ współrzędnych ROBROOT 41Układ współrzędnych TOOL 41, 69Układ współrzędnych WORLD 41Układy współrzędnych 40Uruchamianie 23, 59Uruchamianie programu (do tyłu) 95Uruchamianie programu (tryb automatyczny) 94Uruchamianie trybu Automatyka zewnętrzna 96Uruchomienie programu (ręcznie) 94Urządzenia ochronne 15Ustawienia 24Usterki 23Usuwanie 27Usuwanie kalibracji 69Usuwanie wierszy programu 113Utrata kalibracji 63, 66Użytkownik 21, 22Użytkownik dokumentacji 7
WW pobliżu toru 12WAIT 110WAITFOR 111Wczytywanie 98, 99, 100Wejścia/wyjścia, analogowe 51, 107Wejścia/wyjścia, automatyka zewnętrzna 52Wejścia/wyjścia, cyfrowe 50, 107Wejście do ochrony operatora 16Wersja, BIOS 55Wersja, interfejs graficzny 55Wersja, skaner antywirusowy 56Wersja, system podstawowy 55Wersja, systemu operacyjnego 55Wersja, układ sterowania robota 55Wiersz stanu 87Właściwości, KUKA.SafeRobot 21Wprowadzanie danych dodatkowego obciążenia 85Wprowadzanie danych numerycznych, narzędzie 75
125 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
Wprowadzanie danych numerycznych, podstawa 77Wprowadzanie danych obciążenia 85Wskazówki 7Wskazówki bezpieczeństwa 7Wskaźnik rekordu 92Wstecz 93Wstęp 7Wybór narzędzia 43Wybór osi 45Wybór podstawy 43Wycofanie z eksploatacji 27Wyjście, analogowe 109Wyjście, cyfrowe 108Wykres obciążenia 84WYŁĄCZENIE AWARYJNE 11, 14WYŁĄCZNIK AWARYJNY 29
ZZakresy robocze 49Zapisywanie kalibracji 68Zatrzymanie na przebiegu krzywej 11Zatrzymywanie programu 94, 95, 96Zewnętrzne urządzenia zabezpieczające 14Zewnętrzne WYŁĄCZENIE AWARYJNE 16Zewnętrzny przycisk zatwierdzający 16Zgodnie z przebiegiem toru 11Zmiana nazwy narzędzia 82Zmiana nazwy podstawy 82Zmiana wiersza 91Zmiana, parametry ruchu 104Zmień, instrukcja logiczna 112Zmień, punkt wczytany 104Znaki kalibracyjne 63, 64Znaki specjalne 112Znaki towarowe 7Zresetuj programu 95
126 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl

V1.1
127 / 12820.07.2006 KSS-AD-EA-5x pl
Instrukcja obsługi i programowania
128 / 128 V1.1 20.07.2006 KSS-AD-EA-5x pl