Rekonstrukcja zderzenia dwóch samochodów osobowych ...
52
Rekonstrukcja zderzenia dwóch samochodów osobowych – podstawowe zasady i praktyka ich stosowania dr inŜ. Miroslaw Gidlewski Politechnika Radomska, WyŜsza Szkola Biznesu, RN SRTSiRD mgr inŜ. Leszek Jemiol Politechnika Radomska III Konferencja naukowo-szkoleniowa Rozwój techniki samochodowej a ubezpieczenia komunikacyjne
-
Upload
trinhxuyen -
Category
Documents
-
view
221 -
download
0
Transcript of Rekonstrukcja zderzenia dwóch samochodów osobowych ...
Rekonstrukcja zderzenia dwóch samochodów osobowych –podstawowe zasady i praktyka ich
stosowania
dr in Ŝ. Mirosław GidlewskiPolitechnika Radomska, WyŜsza Szkoła Biznesu, RN SRTSiRD
mgr inŜ. Leszek JemiołPolitechnika Radomska
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Fazy przebiegu wypadku drogowego polegającego na zderzeniu dwóch samochodów
• okres poprzedzający powstanie zagroŜenia
wypadkowego,
• chwila powstania zagroŜenia wypadkowego,
• okres od chwili powstania zagroŜenia
wypadkowego do chwili zderzenia,
• okres zderzenia dwóch samochodów,
• okres po zderzeniu.
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Rekonstrukcja wypadku drogowegopolega na odtworzeniu w/w faz jego przebiegu
w kolejności odwrotnej niŜ przebiegały one w rzeczywistości.
Wychodząc z połoŜeń samochodów po wypadku, poprzez
„cofanie samochodów do tyłu”, dąŜy się do wyznaczenia
połoŜeń samochodów na jezdni oraz kierunków i wartości ich
prędkości na początku kaŜdej fazy wypadku drogowego, a w
szczególności w chwili bezpośrednio poprzedzającej powstanie
zagroŜenia wypadkowego.
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Ślady na miejscu wypadku drogowego istotne dla jego rekonstrukcji
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
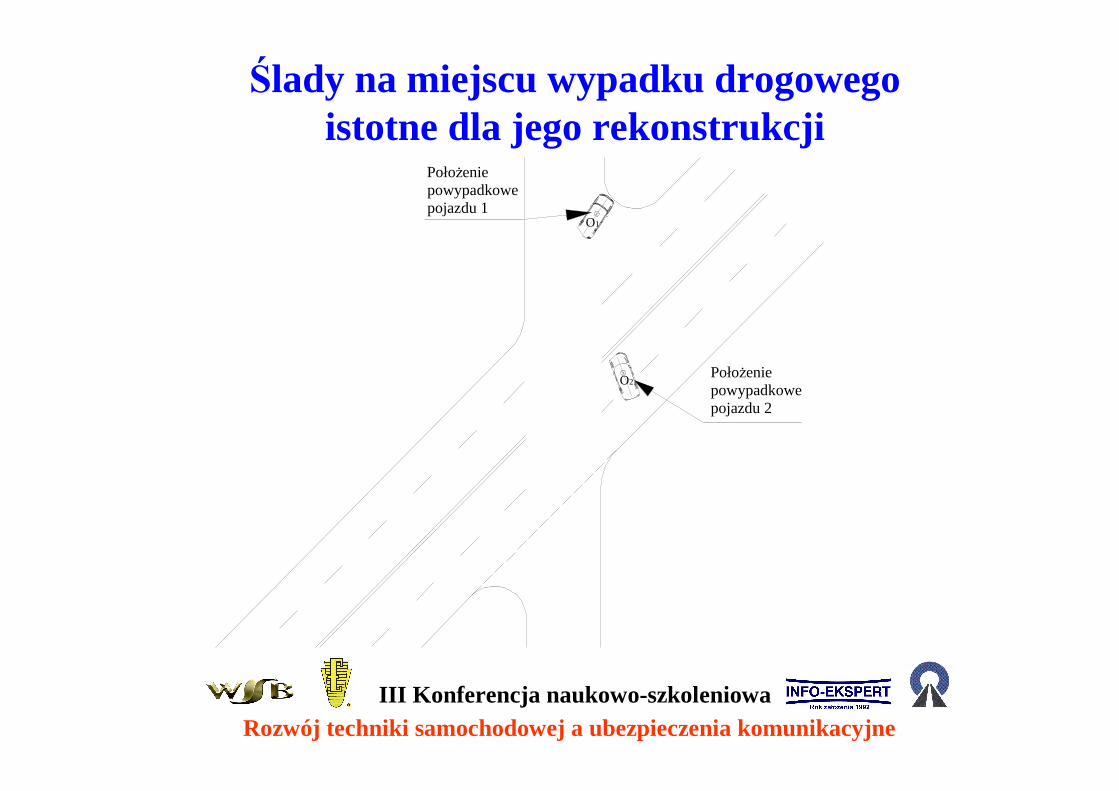
Ślady na miejscu wypadku drogowego istotne dla jego rekonstrukcji
PołoŜenie powypadkowe pojazdu 1
PołoŜenie powypadkowe pojazdu 2
O1
O2
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
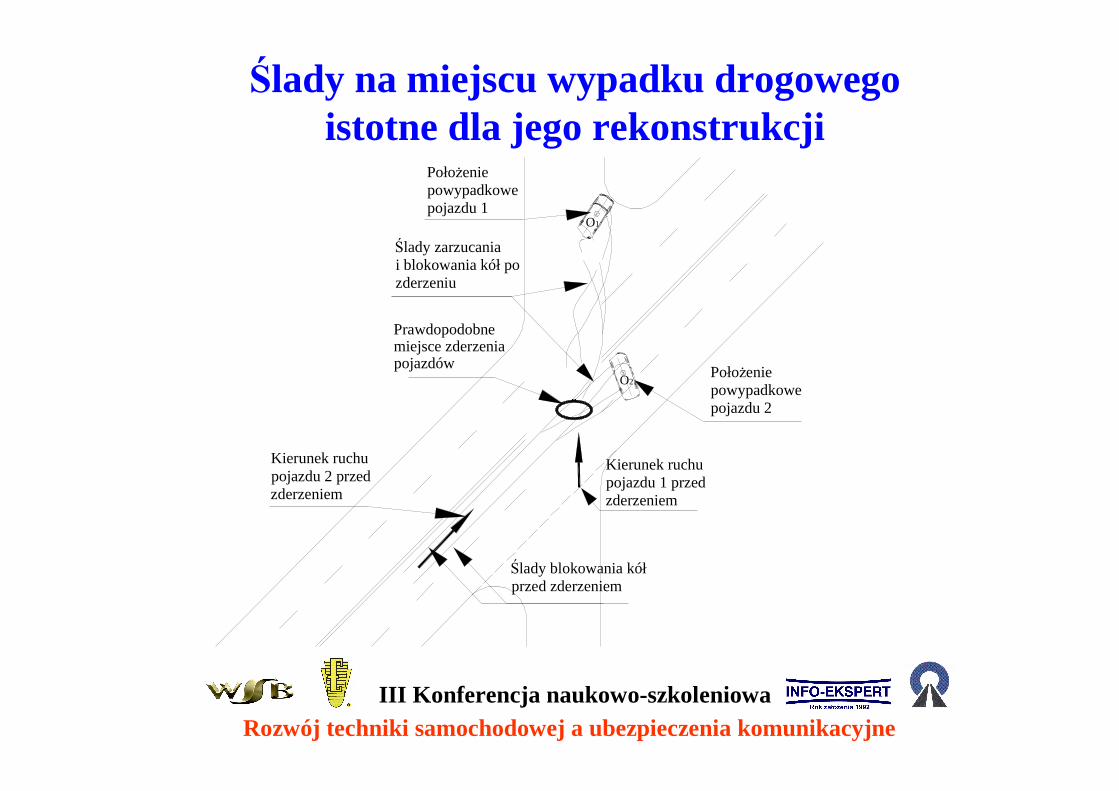
Ślady na miejscu wypadku drogowego istotne dla jego rekonstrukcji
PołoŜenie powypadkowe pojazdu 1
PołoŜenie powypadkowe pojazdu 2
Kierunek ruchu pojazdu 2 przed zderzeniem
Kierunek ruchu pojazdu 1 przed zderzeniem
Prawdopodobne miejsce zderzenia pojazdów
O1
Ślady zarzucania i blokowania kół po zderzeniu
Ślady blokowania kół przed zderzeniem
O2
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
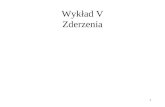
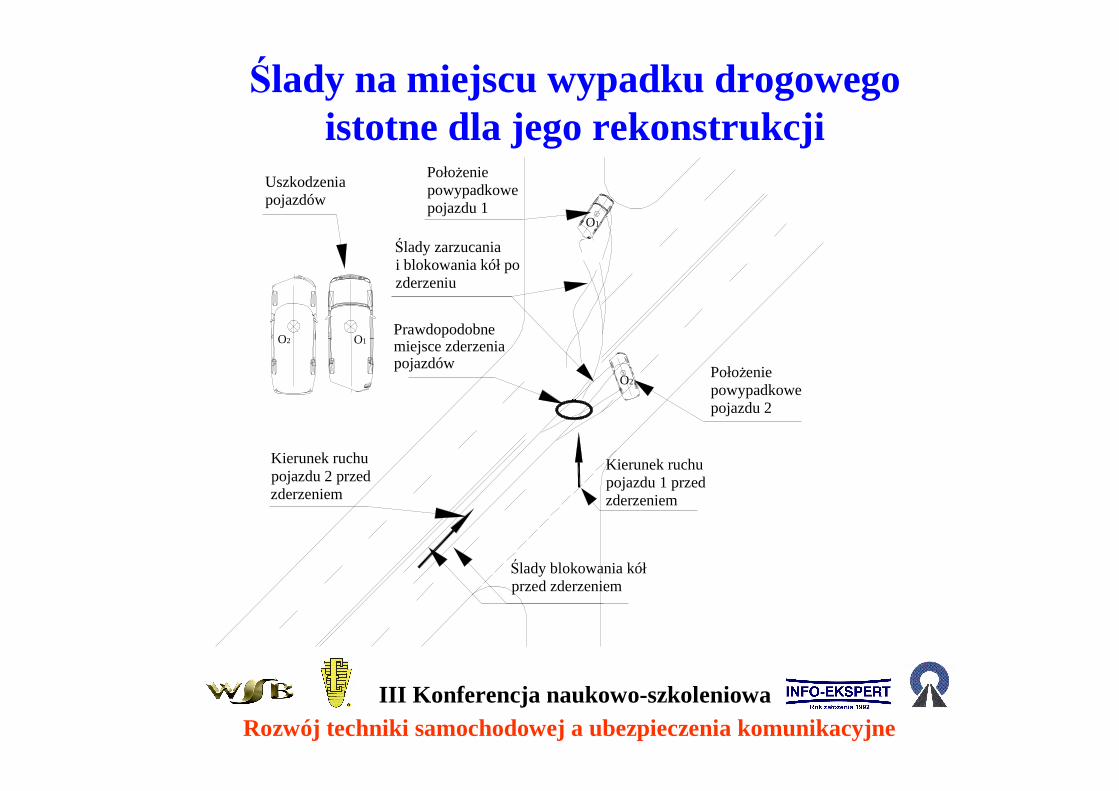
Ślady na miejscu wypadku drogowego istotne dla jego rekonstrukcji
PołoŜenie powypadkowe pojazdu 1
PołoŜenie powypadkowe pojazdu 2
Kierunek ruchu pojazdu 2 przed zderzeniem
Kierunek ruchu pojazdu 1 przed zderzeniem
Prawdopodobne miejsce zderzenia pojazdów
Uszkodzenia pojazdów
O1
O1O2
Ślady zarzucania i blokowania kół po zderzeniu
Ślady blokowania kół przed zderzeniem
O2

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Ślady na miejscu wypadku drogowego istotne dla jego rekonstrukcji

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Ślady na miejscu wypadku drogowego istotne dla jego rekonstrukcji

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Ślady na miejscu wypadku drogowego istotne dla jego rekonstrukcji
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Rekonstrukcję wypadku drogowego polegającego na zderzeniu dwóch samochodów moŜna podzielićna trzy etapy:
1. Wyznaczanie wartości danych wejściowych potrzebnych do przeprowadzenia obliczeń.
2. Wyznaczanie prędkości samochodów w poszczególnych fazach wypadku drogowego.
3. Analiza czasowo przestrzenna wypadku drogowego.

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczenie wartości danych wejściowych potrzebnych do przeprowadzenia obliczeń
Kierunek normalny
kierunek styczny
O1
AO1
O1
O2
O2
O2

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczenie wartości danych wejściowych potrzebnych do przeprowadzenia obliczeń
Kierunek normalny
Kierunek styczny
O1
O2
O1
O2
O1
O2

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczenie wartości danych wejściowych potrzebnych do przeprowadzenia obliczeń
Kierunek normalny
Kierunek styczny
O1
O2
O1
O2
O1
O2
ϕ '
360−ϕ '
α '
o
1
1
1
1
1
2
2
2
2
2
αα '
α
S
S
S '
S '

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczenie wartości danych wejściowych potrzebnych do przeprowadzenia obliczeń
y
x
y
xO
1A
2A2A
1A
11
xx
y
y
1
2
2
2O
O
-S
y
x
S
S-S
xy
y
x
A Kierunek styczny
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
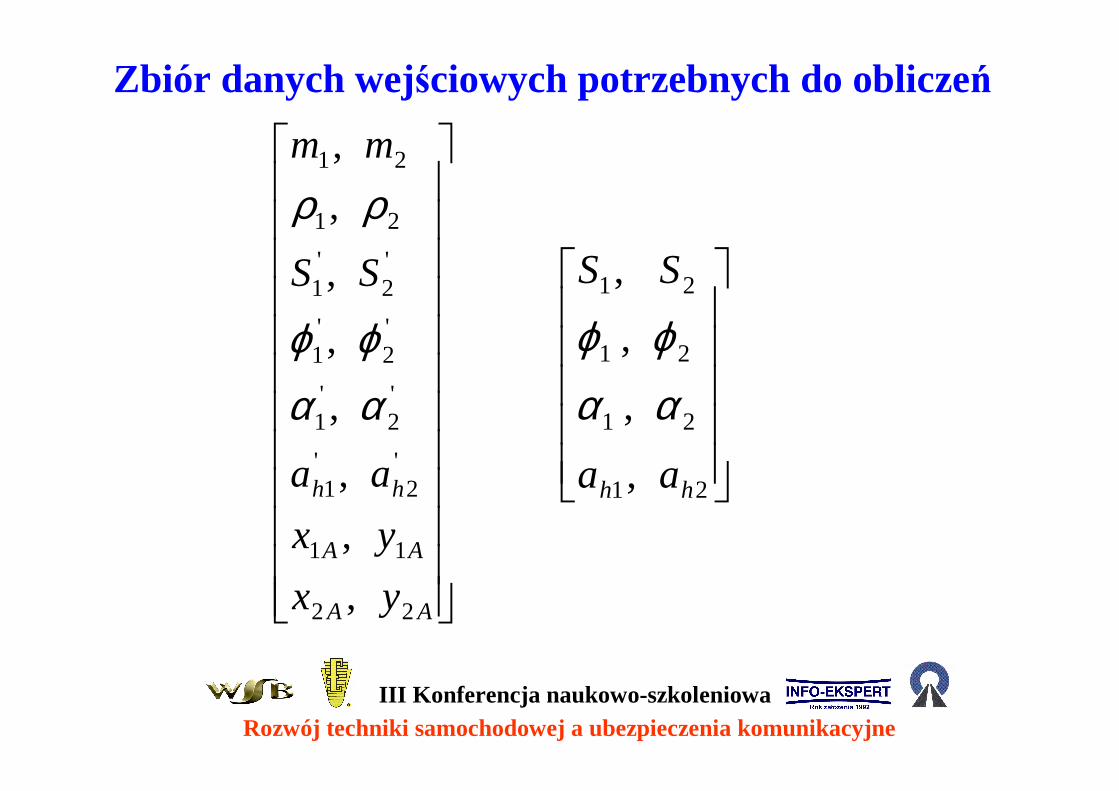
Zbiór danych wejściowych potrzebnych do obliczeń
AA
AA
hh
yx
yx
aa
SS
mm
22
11
'2
'1
'2
'1
'2
'1
'2
'1
21
21
,
,
,
,
,
,
,
,
ααϕϕ
ρρ
21
21
21
21
,
,
,
,
hh aa
SS
ααϕϕ
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów w poszczególnych fazach wypadku drogowego
1. Wyznaczanie prędkości samochodów bezpośrednio po zderzeniu
2. Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
3. Wyznaczanie prędkości samochodów w chwili zablokowania kół
4. Wyznaczenie prędkości początkowych samochodów
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
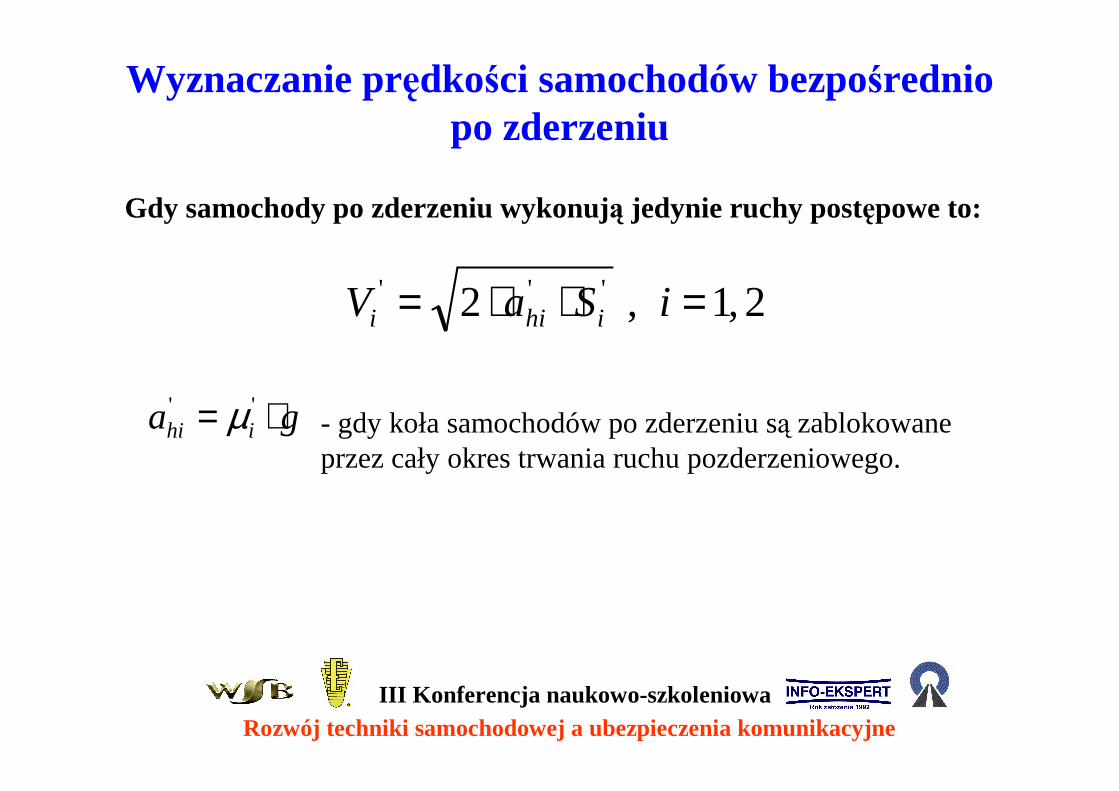
Wyznaczanie prędkości samochodów bezpośrednio po zderzeniu
Gdy samochody po zderzeniu wykonują jedynie ruchy postępowe to:
2,1,2 ''' =⋅⋅= iSaV ihii
ga ihi ⋅= '' µ - gdy koła samochodów po zderzeniu są zablokowane przez cały okres trwania ruchu pozderzeniowego.
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio po zderzeniu
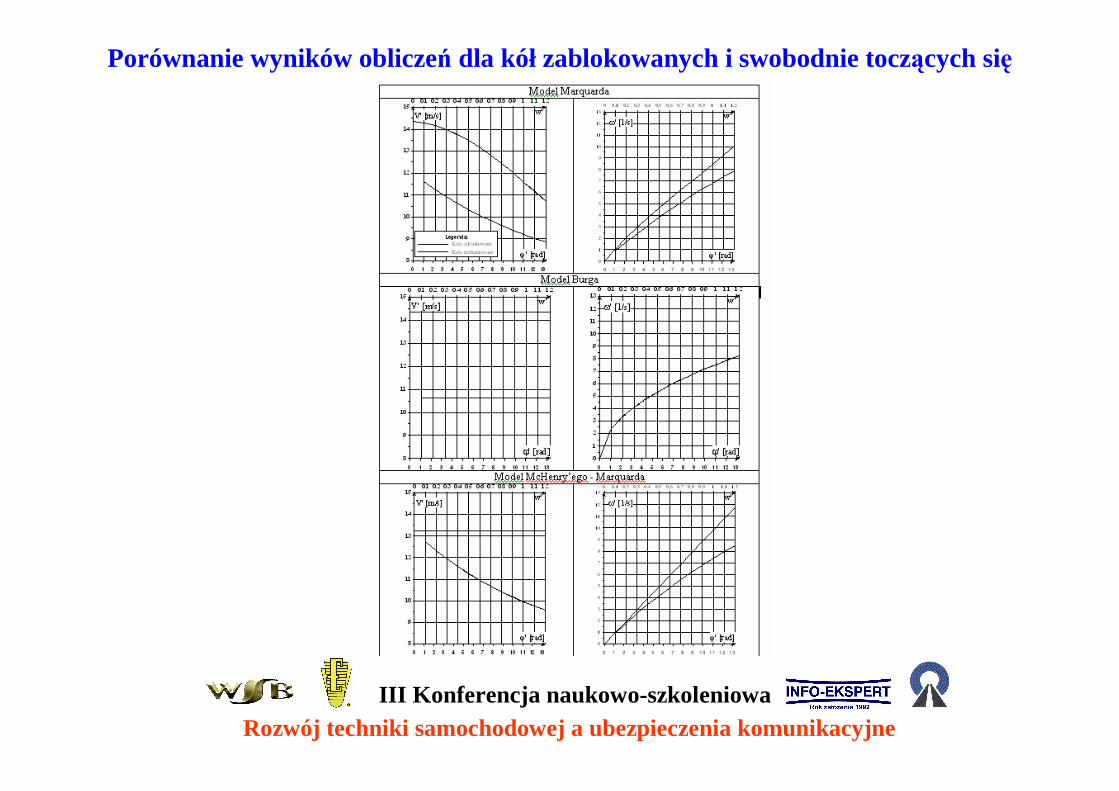
Gdy samochody po zderzeniu wykonują ruchy złoŜone, wykorzystuje się uproszczone modele obliczeniowe:
• Marquarda,
• Burga,
• McHenry’ego-Marquarda.

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Porównanie wyników obliczeń dla róŜnych modeli
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Porównanie wyników obliczeń dla kół zablokowanych i swobodnie toczących się
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
• samochody bezpośrednio przed, w chwili i po zderzeniu wykonują ruch płaski po równej, poziomej nawierzchni,
• czas zderzenia jest nieskończenie krótki, a wartości siły towarzyszących zderzeniu rosną do nieskończoności; w związku z tym w czasie zderzenia samochody nie zmieniają swoich połoŜeń, punkt przyłoŜenia i kierunek działania impulsu siły pozostają stałe, a wartości wektorów prędkości samochodów ulegają nagłym zmianom,
• wektor impulsu siły w chwili zderzenia leŜy w płaszczyźnie jezdni a wartości impulsów sił zewnętrznych działających na samochody są pomijalnie małe w stosunku do wartości impulsu siły powstającego w chwili zderzenia samochodów,
• w wyniku zderzenia nie zmieniają się wartości mas i momentów bezwładności oraz połoŜenia środków mas samochodów uczestniczących w zderzeniu.
ZałoŜenia upraszczające:
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
Równania pędu:
−=−⋅
=−⋅
SVVm
SVVm
)(
)(
2'
22
1'
11
( )( )( )( )
−=−⋅
−=−⋅
=−⋅
=−⋅
yyy
xxx
yyy
xxx
SVVm
SVVm
SVVm
SVVm
2'
22
2'
22
1'
11
1'
11
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
Równania krętu:
⋅+⋅−=−−
=−×=−⋅⋅
⋅−⋅==×=−⋅⋅
AxAy
yx
AAA
AxAy
yx
AAA
ySxS
SS
yx
kji
Srm
ySxS
SS
yx
kji
Srm
222222'2
222
111111'1
211
0
0)()(
0
0)(
ωωρ
ωωρ
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
Zbiórniewiadomych:
y
x
y
x
y
x
S
S
V
V
V
V
2
1
2
2
1
1
ωω
8 niewiadomycha tylko 6 równań
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
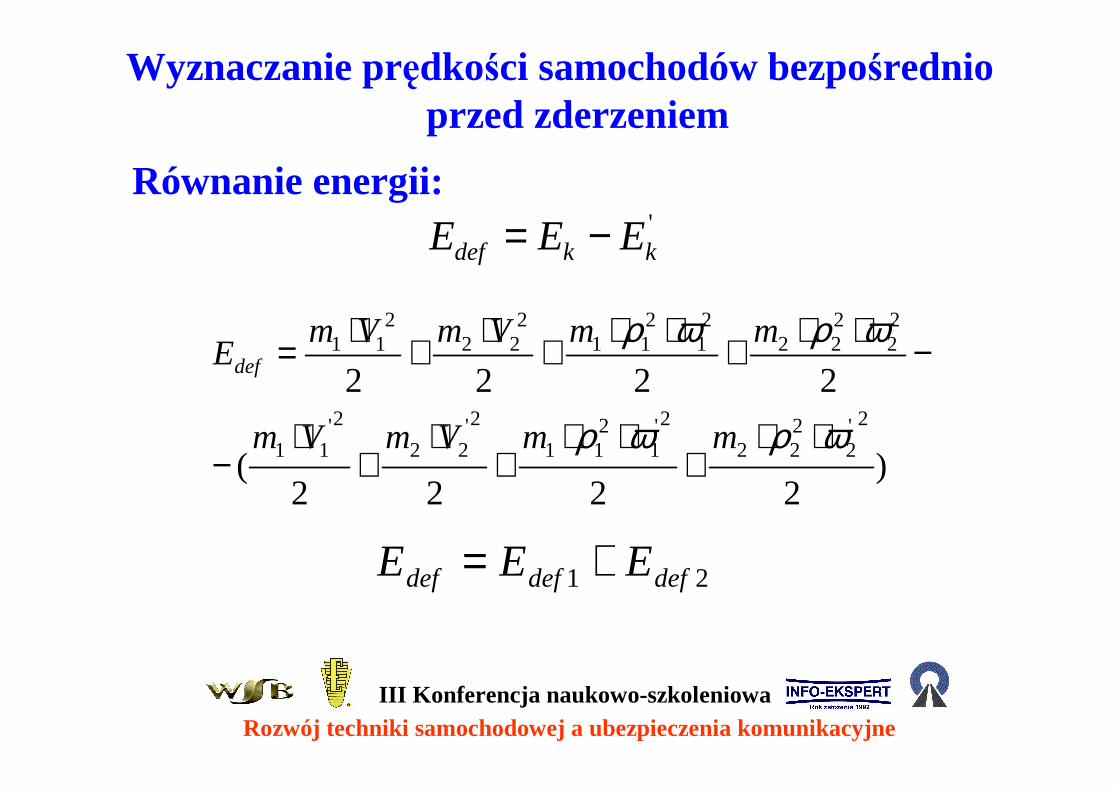
Równanie energii:
)2222
(
22222'
2222
2'1
211
2'22
2'11
22
222
21
211
222
211
ωρωρ
ωρωρ
⋅⋅+
⋅⋅+
⋅+
⋅−
−⋅⋅+⋅⋅+⋅+⋅=
mmVmVm
mmVmVmEdef
'kkdef EEE −=
21 defdefdef EEE +=
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
⋅⋅−⋅
+=
⋅⋅+⋅−
+=
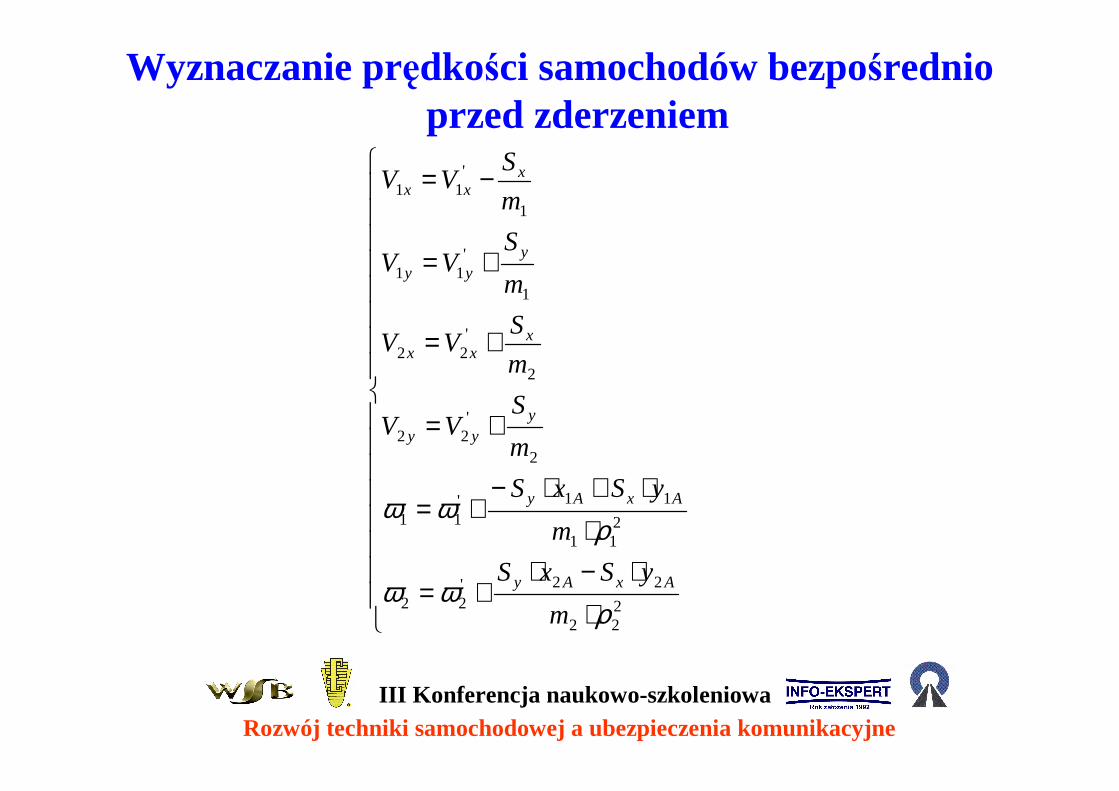
+=
+=
+=
−=
222
22'22
211
11'11
2
'22
2
'22
1
'11
1
'11
ρωω
ρωω
m
ySxS
m
ySxS
m
SVV
m
SVV
m
SVV
m
SVV
AxAy
AxAy
yyy
xxx
yyy
xxx
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
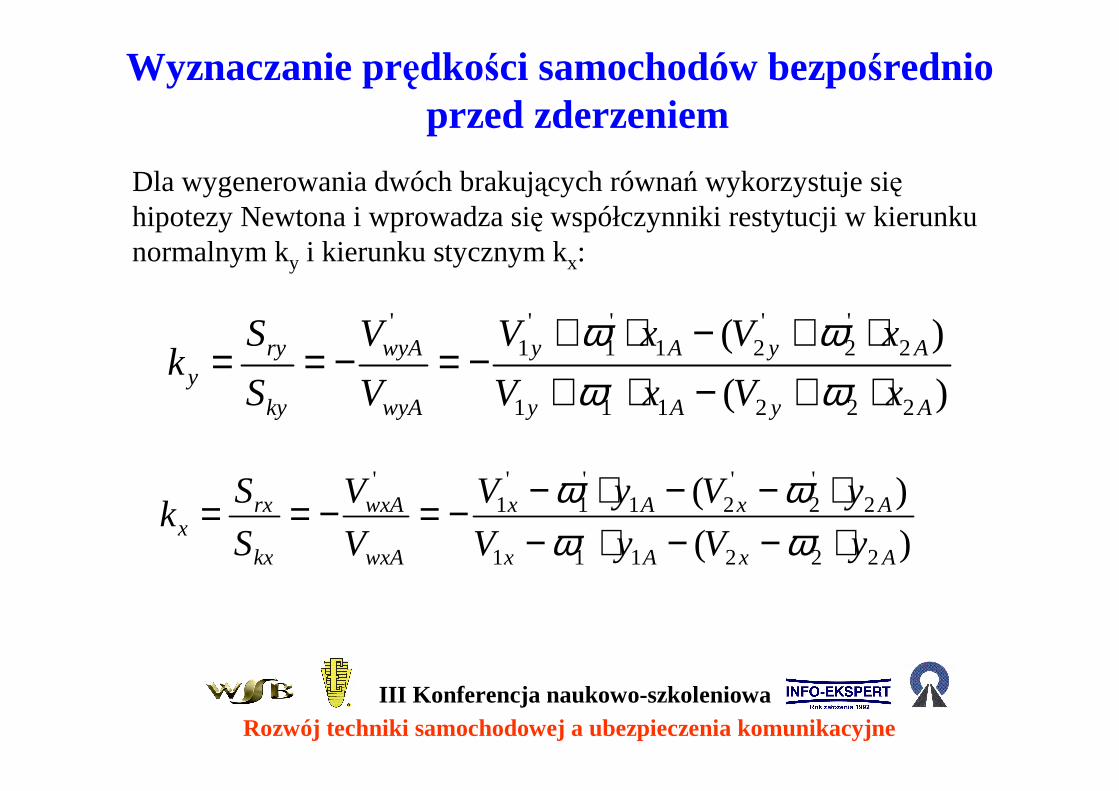
Dla wygenerowania dwóch brakujących równań wykorzystuje sięhipotezy Newtona i wprowadza się współczynniki restytucji w kierunku normalnym ky i kierunku stycznym kx:
)(
)(
222111
2'2
'21
'1
'1
'
AyAy
AyAy
wyA
wyA
ky
ryy xVxV
xVxV
V
V
S
Sk
⋅+−⋅+⋅+−⋅+
−=−==ωωωω
)(
)(
222111
2'2
'21
'1
'1
'
AxAx
AxAx
wxA
wxA
kx
rxx yVyV
yVyV
V
V
S
Sk
⋅−−⋅−⋅−−⋅−−=−==
ωωωω
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
Dla zderzenia szorstkiego bez poślizgu:
2321
3'
1'
2321
3'
2'
1
1
CCC
CVCV
k
kS
CCC
CVCV
k
kS
wxAwyAy
wyAwxAx
−⋅⋅−⋅
⋅+=
−⋅⋅−⋅
⋅+=
222
22
211
21
211
11
ρρ ⋅+
⋅++=
m
y
m
y
mmC AA
222
22
211
21
212
11
ρρ ⋅+
⋅++=
m
x
m
x
mmC AA
222
22211
113 ρρ ⋅
⋅−⋅⋅−=
m
yx
m
yxC AAAA
xy
x
S
S µ⟨
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
Dla zderzenia szorstkiego z poślizgiem:
)(
)(
222111
2'2
'21
'1
'1
'
AyAy
AyAy
wyA
wyAy xVxV
xVxV
V
Vk
⋅+−⋅+⋅+−⋅+
−=−=ωωωω
xywxAx SVS µ⋅⋅−= )sgn(
222
222211
111
21
'
)()(11(
1
ρµ
ρµ
⋅⋅−⋅+
⋅⋅−⋅++
⋅+
=
m
yxx
m
yxx
mm
V
k
kS
AxAAAxAA
wyA
y
yy
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
+= xk
kfS µ,
1
4.16.0 ≤≤ xµ
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
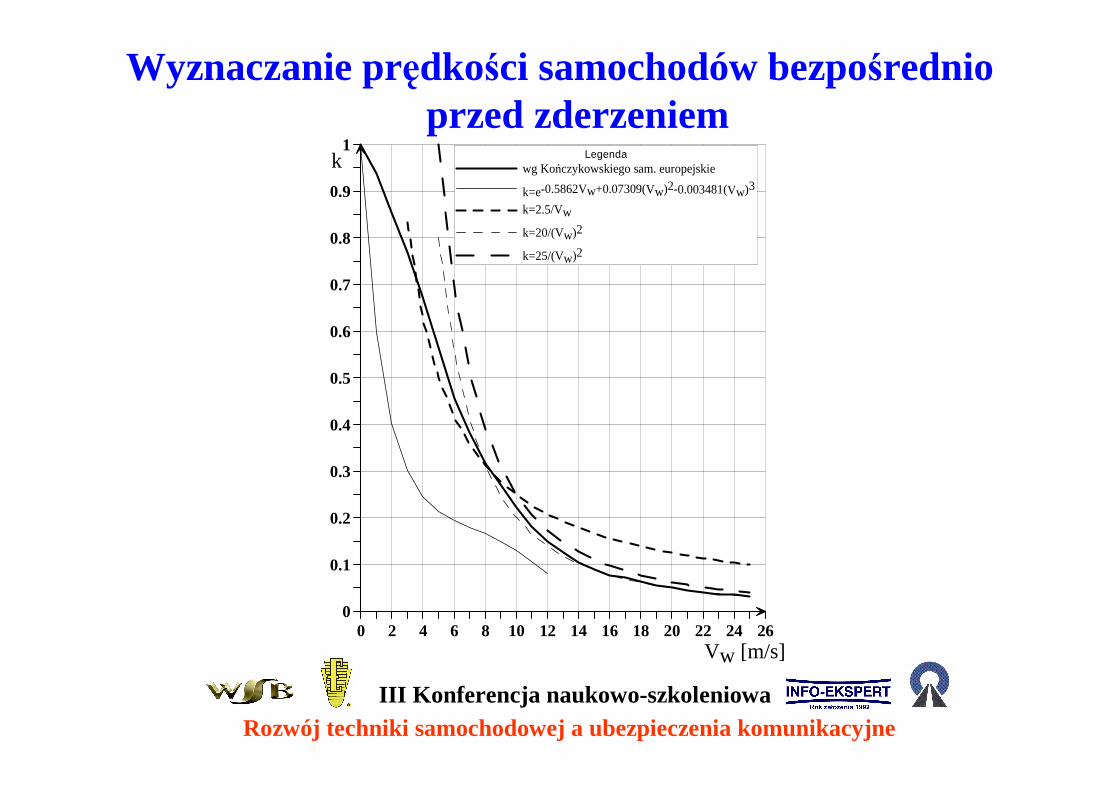
0 2 4 6 8 10 12 14 16 18 20 22 24 26Vw [m/s]
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1k Legenda
wg Kończykowskiego sam. europejskie
k=e-0.5862Vw+0.07309(Vw)2-0.003481(Vw)3
k=2.5/Vw
k=20/(Vw)2
k=25/(Vw)2
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
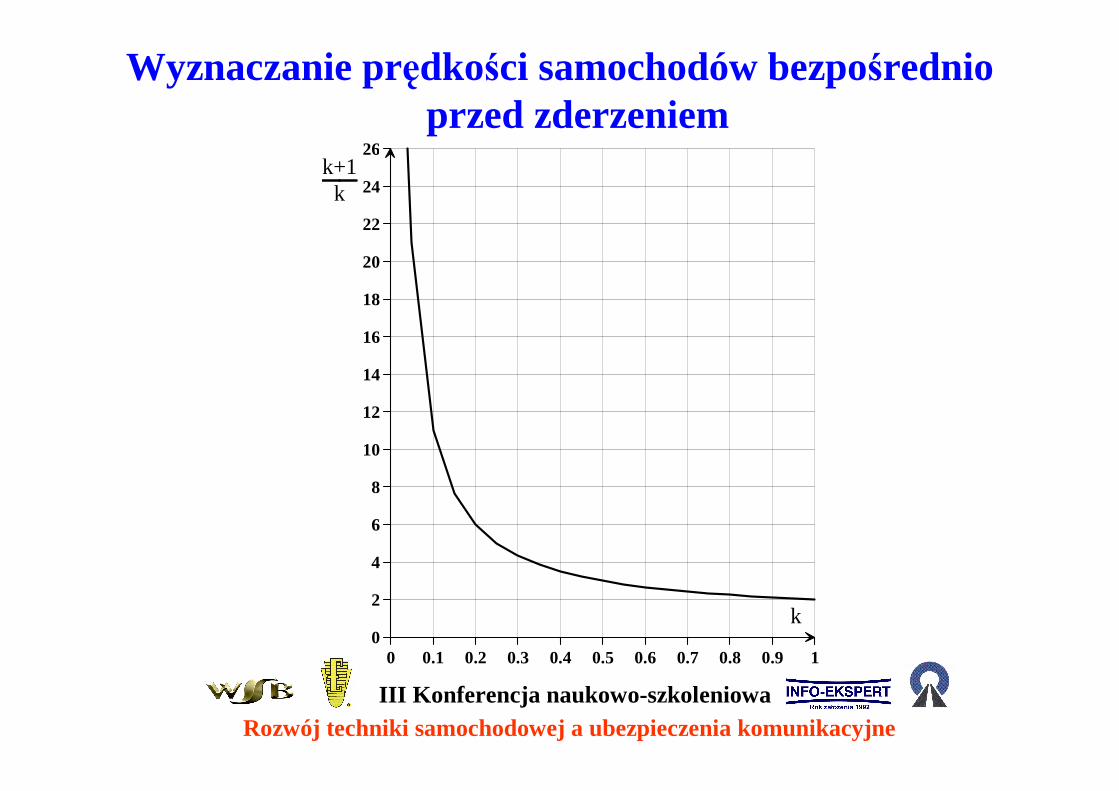
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
k0
2
4
6
8
10
12
14
16
18
20
22
24
26
k+1k

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
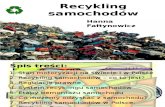
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
I przypadek: znane są kierunki ruchu samochodów przed zderzeniem (kąty α1 i α2)
⋅⋅+⋅⋅=⋅⋅+⋅⋅
⋅⋅+⋅⋅=⋅⋅+⋅⋅'2
'22
'1
'11222111
'2
'22
'1
'11222111
sinsinsinsin
coscoscoscos
αααααααα
VmVmVmVm
VmVmVmVm
2
1'2
'221
'1
'11
122
1
'22
'22
'12
'11
121
)sin()sin(
)sin(
1
)sin()sin(
)sin(
1
m
VmVmV
m
VmVmV
αααααα
αααααα
−⋅⋅+−⋅⋅⋅−
=
−⋅⋅+−⋅⋅⋅−
=
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
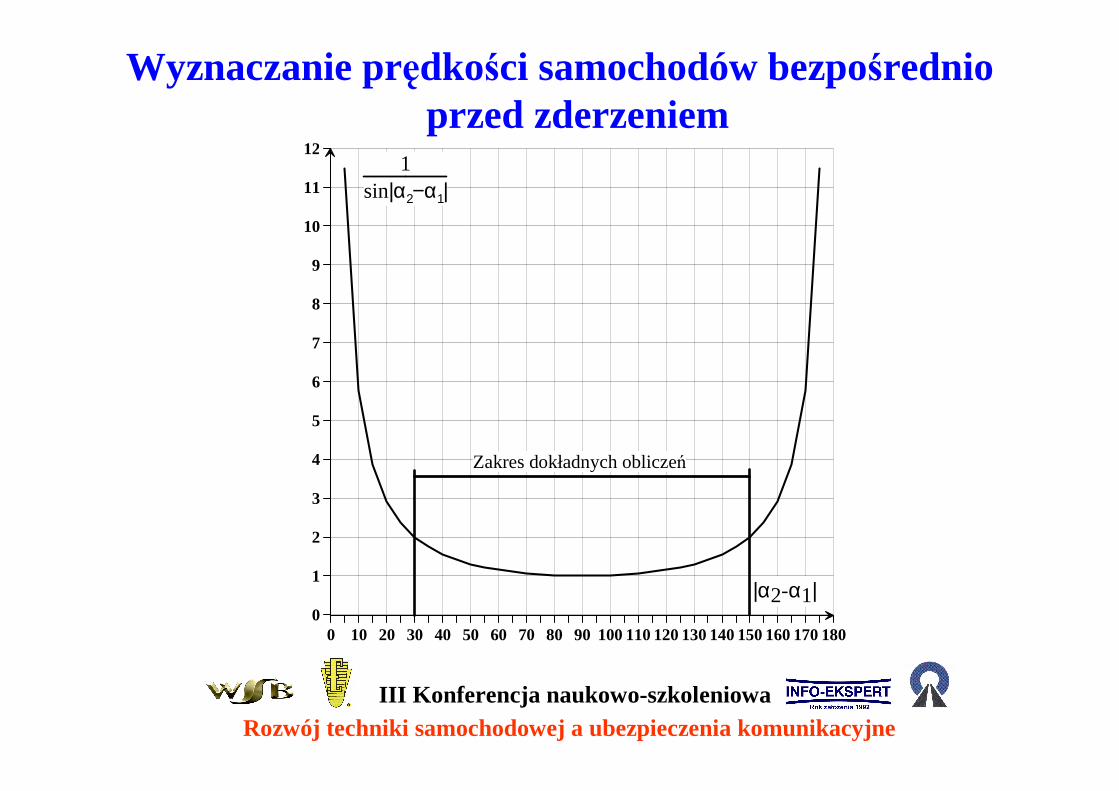
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180
|α2-α1|0
1
2
3
4
5
6
7
8
9
10
11
12
1
sin|α2−α1|
Zakres dokładnych obliczeń
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
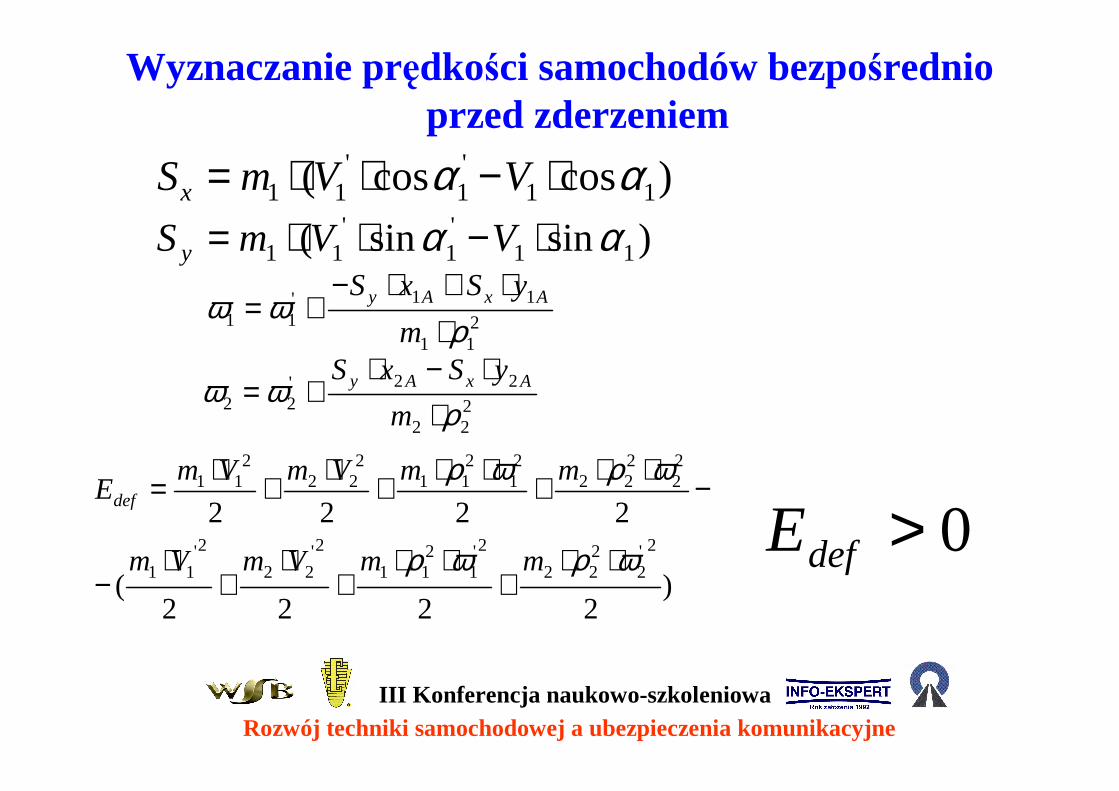
)coscos( 11'1
'11 αα ⋅−⋅⋅= VVmSx
)sinsin( 11'1
'11 αα ⋅−⋅⋅= VVmS y
211
11'11 ρ
ωω⋅
⋅+⋅−+=
m
ySxS AxAy
222
22'22 ρ
ωω⋅
⋅−⋅+=
m
ySxS AxAy
)2222
(
22222'
2222
2'1
211
2'22
2'11
22
222
21
211
222
211
ωρωρ
ωρωρ
⋅⋅+
⋅⋅+
⋅+
⋅−
−⋅⋅+⋅⋅+⋅+⋅=
mmVmVm
mmVmVmEdef
0>defE
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
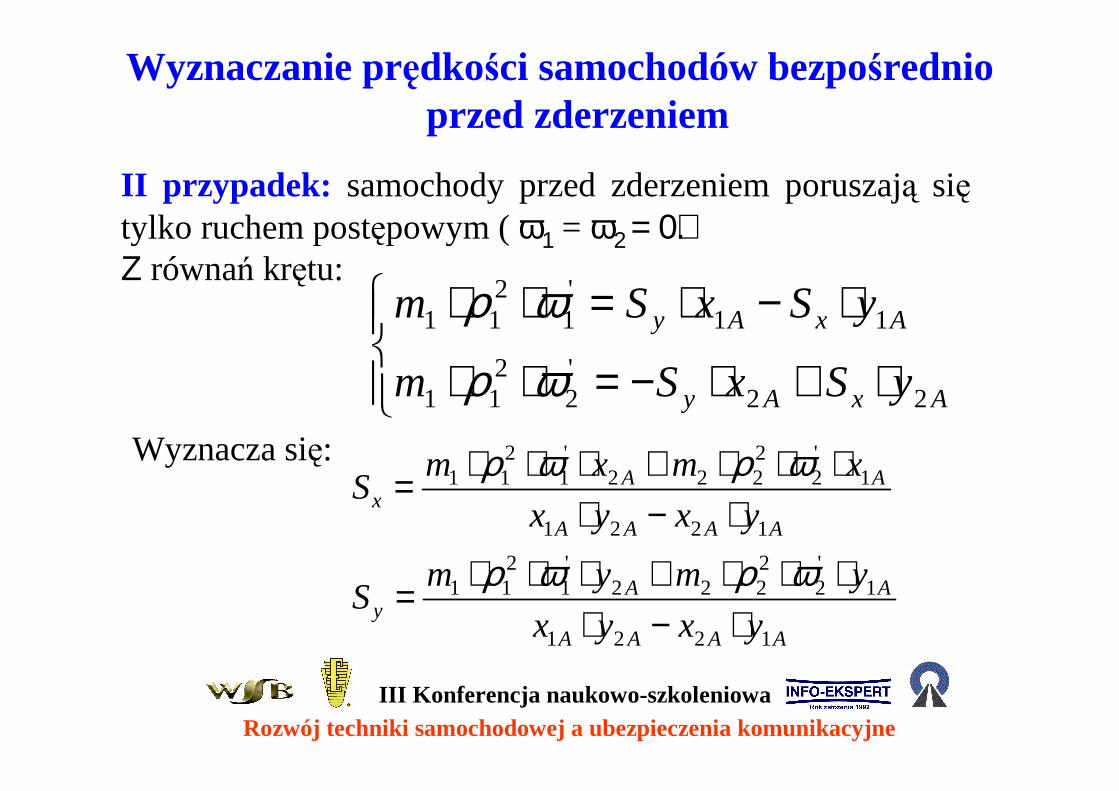
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
II przypadek: samochody przed zderzeniem poruszają siętylko ruchem postępowym ( ω1 = ω2 = 0).Ζ równań krętu:
⋅+⋅−=⋅⋅
⋅−⋅=⋅⋅
AxAy
AxAy
ySxSm
ySxSm
22'2
211
11'1
211
ωρ
ωρ
Wyznacza się:
AAAA
AAy
AAAA
AAx
yxyx
ymymS
yxyx
xmxmS
1221
1'2
2222
'1
211
1221
1'2
2222
'1
211
⋅−⋅⋅⋅⋅+⋅⋅⋅=
⋅−⋅⋅⋅⋅+⋅⋅⋅=
ωρωρ
ωρωρ
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
III przypadek: znane są kierunki ruchu samochodów przed zderzeniem (kąty α1 i α2) oraz samochody poruszają sięruchem postępowym ( ω1 = ω2 = 0) – 4 niewiadome, 6 równań.
Prędkości samochodów przed zderzeniem wyznacza się z równań pędu, a równania krętu wykorzystuje się do weryfikacji np. wyznaczonych wcześniej wielkości charakteryzujących ruch samochodów po zderzeniu.
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
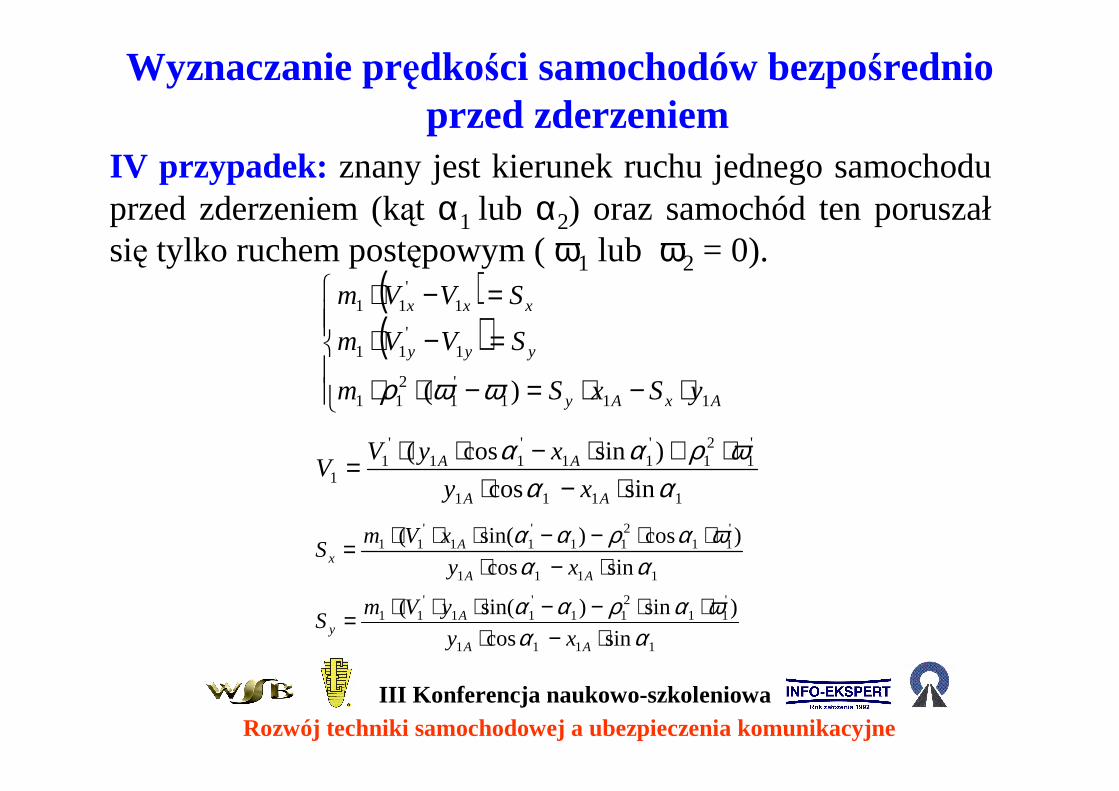
IV przypadek: znany jest kierunek ruchu jednego samochodu przed zderzeniem (kąt α1 lub α2) oraz samochód ten poruszałsię tylko ruchem postępowym ( ω1 lub ω2 = 0).
( )( )
⋅−⋅=−⋅⋅
=−⋅
=−⋅
AxAy
yyy
xxx
ySxSm
SVVm
SVVm
111'1
211
1'
11
1'
11
)( ωωρ
1111
'1
21
'11
'11
'1
1sincos
)sincos(
ααωραα
⋅−⋅⋅+⋅−⋅⋅
=AA
AA
xy
xyVV
1111
'11
211
'11
'11
sincos
)cos)sin((
ααωαραα
⋅−⋅⋅⋅−−⋅⋅⋅=
AA
Ax xy
xVmS
1111
'11
211
'11
'11
sincos
)sin)sin((
ααωαραα
⋅−⋅⋅⋅−−⋅⋅⋅=
AA
Ay xy
yVmS
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
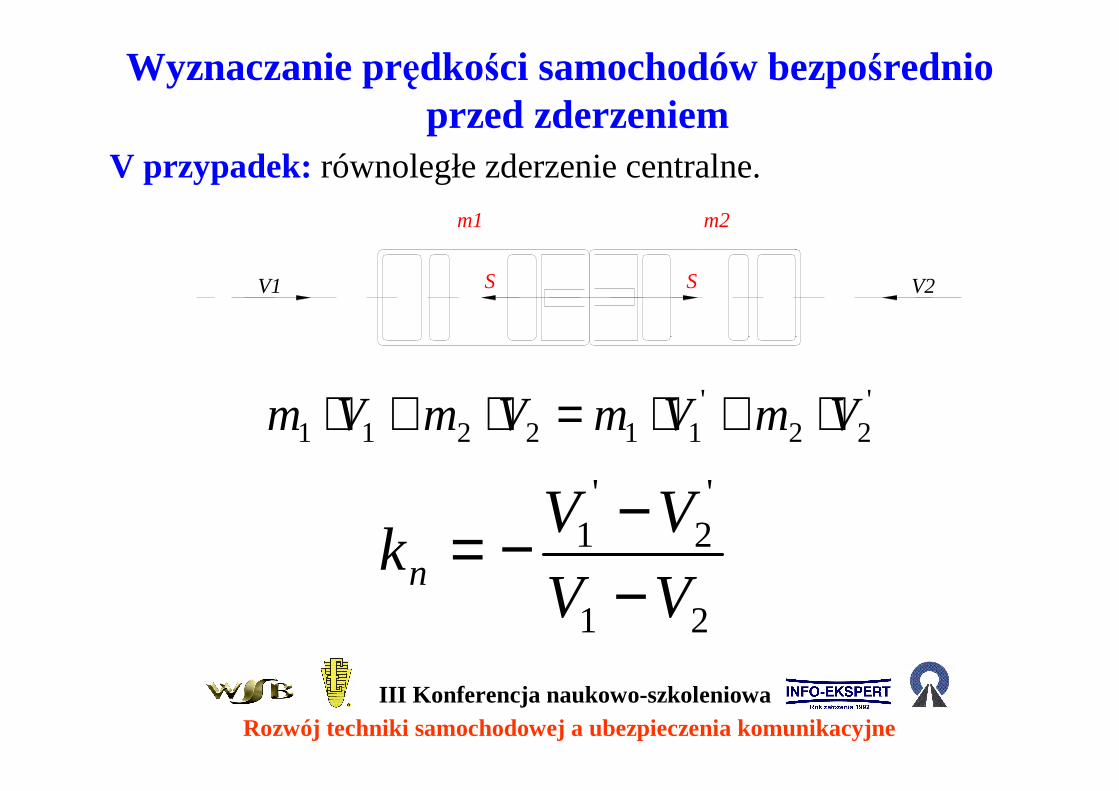
V przypadek: równoległe zderzenie centralne.
V1 V2SS
m1 m2
'22
'112211 VmVmVmVm ⋅+⋅=⋅+⋅
21
'2
'1
VV
VVkn −
−−=
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
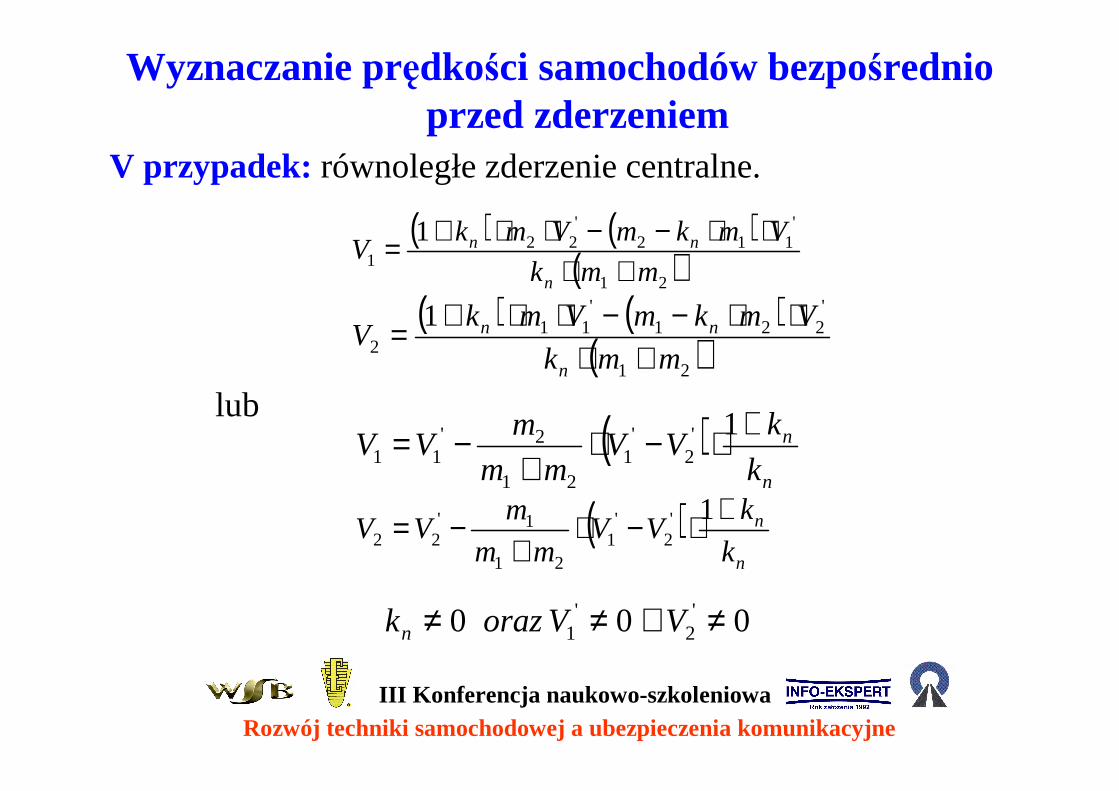
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
V przypadek: równoległe zderzenie centralne.
( ) ( )( )21
'112
'22
1
1
mmk
VmkmVmkV
n
nn
+⋅⋅⋅−−⋅⋅+=
( ) ( )( )21
'221
'11
2
1
mmk
VmkmVmkV
n
nn
+⋅⋅⋅−−⋅⋅+=
( )n
n
k
kVV
mm
mVV
+⋅−⋅+
−= 1'2
'1
21
2'11
( )n
n
k
kVV
mm
mVV
+⋅−⋅+
−= 1'2
'1
21
1'22
lub
000 '2
'1 ≠∧≠≠ VVorazkn
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
V przypadek: równoległe zderzenie centralne.
⋅+⋅+=⋅+⋅
⋅+⋅=⋅+⋅
2222
2'22
2'11
222
211
'22
'112211
VmVmE
VmVm
VmVmVmVm
def
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
VI przypadek: równoległe zderzenie centralne skutkujące zmniejszeniem prędkości samochodów do zera i odbiciem sięsamochodów.
( ) ( ) 1212
21 1
2
mmmk
mEV
n
def
⋅+⋅−⋅⋅
= ( ) ( ) 2212
12 1
2
mmmk
mEV
n
def
⋅+⋅−⋅⋅
=
⋅+⋅+=⋅+⋅
=⋅+⋅
2222
02'
222'
112
222
11
2211
VmVmE
VmVm
VmVm
def
2
'2
1
'1
V
V
V
Vkn −=−=
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów bezpośrednio przed zderzeniem
VII przypadek: centralne najechanie na samochód stojący.
'2
1
2'11
'22
'1111
Vm
mVV
VmVmVm
⋅+=
⋅+⋅=⋅
2'2
1
22'1
11
2'22
2'11
211
2
222
Vm
mV
m
EV
VmVmE
Vm
def
def
⋅++⋅
=
⋅+
⋅+=
⋅
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości samochodów w chwili zablokowania kół
Gdy samochody przed zderzeniem wykonują jedynie ruchy postępowe to:
2,1,2 2' =+⋅⋅⋅= iVSgV iiibi µa gdy ruchy złoŜone to:
22222iii
i
toi
i
tpibi V
m
W
m
WV ωρ ⋅++⋅+
⋅=
Dla modelu Marquarda:
( ) 2222 iiiiiisiiibi VkLkSgV ωρϕµ ϕ ⋅++⋅⋅+⋅⋅⋅⋅=
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Wyznaczanie prędkości początkowej samochodów
i=1,2, gdzie
tn – czas narastania opóźnienia hamowania.
nhi
bioi ta
VV ⋅+=2

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
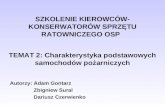
Analiza czasowo-przestrzenna
t
t '
S '
S
S '
t '
0.5
-5
-0.5
-1.0
-1.5
-2.0
1.0
1.5
2.0
2.5
3.0
-2.5
-3.0
3.5
-10-15-20-25-30-35-40-45-50-55 5 10 15 20
t [s]
S [m]
Pojazd 2
Pojazd 1
Legenda
1
1
1
1
2
z2
2
2
t
t
S S
2
rr2

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Analiza czasowo-przestrzenna
O1
O1
O1
O2
O2
S
1O2
z2

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Analiza czasowo-przestrzenna
O1
O1
O1
O2
O2
O2
S
S
1
2
O2
z2
2

III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Analiza czasowo-przestrzenna
O1
O1
O1
O2
O2
O2
O2
S
S
1
2
3
O2
z2
2
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Literatura[1] Kończykowski W.: Odtwarzanie i analiza przebiegu wypadku drogowego,
wyd. Info-Ekspert, Warszawa 1993.[2] Praca zbiorowa pod red. J. Wiercińskiego: Wypadki drogowe – elementy
analizy i technika opiniowania, wyd. WKŁ, Warszawa 1985.[3] Praca zbiorowa: Wypadki drogowe. Vademecum biegłego sądowego, wyd.
IES, Kraków 2002.[4] Prochowski L.: Pojazdy samochodowe. Mechanika ruchu, wyd. WKŁ,
Warszawa 2005.[5] Wicher J.: Pojazdy samochodowe. Bezpieczeństwo samochodów i ruchu
drogowego, wyd. WKŁ, Warszawa 2002.[6] Damer M., Halm J.: Technische Analyse von Verkehrsunfällen, wyd.
Eurotax (International) AG 1994.[7] Wach W.: PcC-Crash program do symulacji wypadków drogowych, wyd.
IES, Kraków 2001.[8] Lejko J.: Mechanika ogólna, wyd. PWN, Warszawa 1987.
III Konferencja naukowo-szkoleniowaRozwój techniki samochodowej a ubezpieczenia komunikacyjne
Dziękujemy za uwagę