100 Ukladow Rownan Liniowych z Pelnymi Rozwiazaniami Krok Po Kroku
Upload
tomasz-pachcinskiCategory
view
234download
4description

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
4. Schematy blokowe układów
automatyki
4.1. Pojęcia podstawowe
Aby przedstawić w sposób czytelny i prosty, a jednocześnie dokładny zależność
pomiędzy poszczególnymi członami układów regulacji, posługujemy się tak zwanymi
schematami blokowymi. Na schemacie blokowym wszystkie człony przedstawione są w
formie prostokątów, zwanych blokami.
Opis znajdujący się wewnątrz bloku (albo obok niego) podaje podstawowe właściwości
członu. Opis ten może być tekstem, wzorem matematycznym lub wykresem. Opis informuje,
w jaki sposób przekształcone są sygnały wprowadzone na wejście członu, na sygnały
otrzymywane na wyjściu członu i jakie są zależności między nimi.
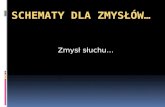
Rys.4.1. Elementy strukturalne schematu blokowego:a) blok, b) węzeł informacyjny, c)węzeł sumacyjny, X - sygnał wejściowy(wymuszenie), Y - sygnał wyjściowy (odpowiedź), G - transmisja bloku
W schemacie blokowym wyróżniamy trzy rodzaje elementów:
blok (człon) – opisany odpowiednią transmitancją G(s);
Schematy blokowe układów automatykiStr.93

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
węzeł informacyjny – punkt, do którego doprowadza się sygnał i z którego
odprowadza się sygnały za pomocą dowolnej liczby odprowadzeń (sygnały
związane z węzłem informacyjnym są identyczne);
węzeł sumacyjny – punkt do którego doprowadza się dowolną liczbę sygnałów
i z którego odprowadza się sygnał będący sumą algebraiczną sygnałów
dochodzących do tego węzła sumacyjnego.
Dla bloku słuszne jest równanie wiążące transformatę sygnału wyjściowego
(odpowiedź) z transformatą sygnału wejściowego (wymuszeniem) przez transmitancje bloku.
(4.1)
gdzie: s = + j - operator transmitancji; X(s) - transformata sygnału wejściowego (sygnał operatorowy wyjściowy); Y(s) - transformata sygnału wyjściowego (sygnał operatorowy wyjściowy); G(s) -
transmitancja operatorowa
Dla węzła informacyjnego sygnał doprowadzony do węzła i sygnały odchodzące od
węzła są takie same.
Dla węzła sumacyjnego obowiązuje równanie:
(4.2)
W węźle sumacyjnym tworzy się sumę lub różnicę sygnałów (uchyb).
Przy przechodzeniu przez kolejne człony układu regulacji sygnał ulega
przekształceniom. Zmianom ulega postać fizyczna sygnału, jego wartość, a także przebieg w
czasie.
Z punktu widzenia automatyki najistotniejszy jest sposób przekształcania sygnału
wejściowego na sygnał wyjściowy. Zależności między sygnałem wejściowym i wyjściowym
mogą być podawane w postaci zależności matematycznych albo w postaci charakterystyk.
Rozróżniamy charakterystyki statyczne, podające zależność między wartością
ustaloną sygnału wyjściowego, a wartością ustaloną sygnału wejściowego, oraz
charakterystyki dynamiczne określające właściwości dynamiczne bloków. Charakterystyki
dynamiczne określają zachowanie się bloków w stanach ustalonych, przy zmieniających się
wartościach sygnałów wejściowych. Wzory analitycznie podają zależności między sygnałami
Schematy blokowe układów automatykiStr.94

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
wejściowymi i wyjściowymi bloków (członów) i opisujące ich właściwości statyczne i
dynamiczne nazywane są transmitancjami.
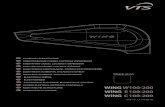
Rys.4.2. Tworzenie schematu blokowego układu regulacji: 1 - obiekt regulacji, 2 - regulator, 3 - człon pomiarowy, 4 - człon wykonawczy
W układach regulacji automatycznej bardzo ważne są zależności czasowe między
sygnałami wyjściowymi, a sygnałami wejściowymi. We wszystkich blokach, które będą
rozpatrywane, sygnał na wyjściu bloku powstaje jako skutek sygnału wprowadzonego na jego
wejście.
Oczywiste jest, że skutek nie może wystąpić wcześniej niż przyczyna, która go
powoduje, i że sygnał wyjściowy może być opóźniony w stosunku do sygnału wejściowego
lub co najwyżej oba te sygnały mogą się pojawić jednocześnie. Jednocześnie (czyli bez
opóźnienia) należy rozumieć w ten sposób, że dla pewnych członów w określonym układzie
można pominąć wprowadzone opóźnienie. Pojęcie równoczesności jest pojęciem względnym
i może się zdarzyć, że ten sam blok w różnych układach musi być traktowany odmiennie.
Schematy blokowe układów automatykiStr.95

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
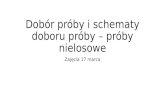
Najprostsze elementy obwodów elektrycznych w blokach.
Rys.4.3. Schematy blokowe elementów biernych.
Schematy blokowe układów automatykiStr.96

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
4.2. Reguły upraszczania schematów blokowych.
Przy przekształcaniu schematów blokowych i wyznaczaniu układu równoważnego
należy przestrzegać zasady, zgodnie z którą w części układu nie podlegającej przekształceniu
nie może zmienić się żadna wielkość.
4.2.1. Połączenie kaskadowe (szeregowe) elementów,
bloków.
Jeżeli sygnał wychodzący z jednego bloku jest sygnałem wchodzącym do bloku następnego
to mówimy, że takie bloki są połączone kaskadowo (szeregowo, łańcuchowo).
Rys.4.4. Połączenie szeregowe bloków.
(4.3)
(4.4)
(4.5)
(4.6)
(4.7)
(4.8)
(4.9)
(4.10)
Schematy blokowe układów automatykiStr.97

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
Przy połączeniu kaskadowym bloków transmitancja bloku zastępczego jest równa
iloczynowi transmitancji bloków zastępczych.
Dla „n” liczby bloków transmitancja zastępcza wynosi:
(4.11)
Schematy blokowe układów automatykiStr.98

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
4.2.2. Połączenie równoległe bloków.
Jeżeli bloki są tak połączone, że sygnał wejściowy każdego bloku jest identyczny, a
sygnały wyjściowe bloków dodają się lub odejmują, to mówimy, że takie bloki są połączone
równolegle. Na wejściu układu równoległego jest węzeł zaczepowy, a na wyjściu węzeł
sumacyjny.
Rys.4.5. Połączenie równoległe.
(4.12)
(4.13)
(4.14)
(4.15)
(4.16)
Przy połączeniu równoległym bloków transmitancja bloku zastępczego jest równa
sumie transmitancji bloków składowych.
Dla "n" liczby bloków transmitancja zastępcza wynosi:
(4.17)
Schematy blokowe układów automatykiStr.99

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
4.2.3. Przenoszenie węzła informacyjnego.
W czasie upraszczania schematów blokowych niekiedy potrzebne jest przeniesienie
węzła informacyjnego z wyjścia na wejście lub z wejścia na wyjście układu.
Rys.4.6. Przenoszenie węzła informacyjnego: a)z wejścia, b)na wyjście.
Rys.4.7. Przenoszenie węzła informacyjnego: a)z wejścia, b)na wyjście.
Schematy blokowe układów automatykiStr.100
a) b)
a) b)

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
4.2.4. Przenoszenie węzła sumacyjnego.
Podobnie jak węzeł informacyjny, można przenieść z wyjścia na wejście oraz z
wejście na wyjście również węzeł sumacyjny.
Rys.4.8. Przenoszenie węzła sumacyjnego: a)z wyjścia, b)na wejście.
a) (4.18)
b) (4.19)
(4.20)
Rys.4.9. Przenoszenie węzła sumacyjnego: a)z wyjścia, b)na wejście
a) (4.21)
(4.22)
(4.23)
Dla układu przedstawionego na rysunku wyznaczymy transmitancję układu
zastępczego.
(4.24)
Schematy blokowe układów automatykiStr.101
a) b)
a) b)

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
(4.25)
Ponadto dla węzła sumacyjnego:
(4.26)
W wyniku przekształceń otrzymamy:
(4.27)
(4.28)
(4.29)
(4.30)
(4.31)
(4.32)
(4.33)
b)
(4.34)
(4.35)
(4.36)
(4.37)
(4.38)
Schematy blokowe układów automatykiStr.102

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
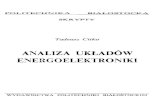
4.2.5. Schemat blokowy ze sprzężeniem zwrotnym.
Rys.4.10. Schemat blokowy ze sprzężeniem zwrotnym
Schemat blokowy układu ze sprzężeniem zwrotnym zwany jest też układem
zamkniętym. Z wyjścia bloku o transmitancji G1(s) tworzącego tor główny przenoszenia
sygnału, sygnał przechodzi przez blok o transmitancji G2(s) tworzący pętlę sprzężenia
zwrotnego i zostaje poprzez węzeł sumacyjny ponownie wprowadzony na wejście bloku
znajdującego się w torze głównym.
Jeżeli do węzła sumacyjnego jest wprowadzony sygnał z gałęzi sprzężenia zwrotnego
ze znakiem minus, to sprzężenie zwrotne jest ujemne, jeżeli zaś ze znakiem plus, to
sprzężenie zwrotne jest dodatnie.
Na wejściu układu jest węzeł sumacyjny, na wyjściu węzeł zaczepowy.
Sztywne sprzężenie zwrotne
Rys.4.11. Schemat blokowy układu ze sztywnym sprzężeniem zwrotnym
Niekiedy mamy do czynienia ze sprzężeniem zwrotnym bezpośrednio, to znaczy
sygnał wyjściowy z toru głównego zostaje bezpośrednio wprowadzony do węzła
sumacyjnego na wyjściu. Oznacza to, że G2(s) = 1. Wtedy:
(4.39)
Schematy blokowe układów automatykiStr.103

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
4.3. Przykłady schematów blokowych układów
automatyki.
Przykład 1. Napisać transmitancję sieci.
G1
G2
H1 +
+
+ +
+ -
Struktura 1 Struktura 2
Struktura 1: to sprzężenie zwrotne dodatnie, które zastąpimy blokiem.
G1
G2
X1(s) X(s) Y(s)
+
+
21
1
1 GG
G
Bo:
(4.40)
(4.41)
znając G1(s) obliczamy Y(s)
(4.42)
(4.43)
(4.44)
Schematy blokowe układów automatykiStr.104

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
(4.45)
(4.46)
Wyznaczamy transmitancję wypadkową dla struktury 1:
(4.47)
Struktura 2: należy przenieść węzeł sumacyjny przed blok.
H1 X1(s) Y(s) +
+
X1(s)
(4.48);(4.49)
(4.50);(4.51)
(4.52)
Wyznaczamy wypadkową transmitancję Hw(s):
(4.53)
Czyli strukturę 1 zastępujemy blokiem:
H1 X1(s) +
+
X1(s)
H1+1
Schematy blokowe układów automatykiStr.105
H1 X1(s) Y(s) +
+
X1(s)
11H

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
otrzymujemy w efekcie strukturę 3, złożoną z dwóch bloków:
+
-
Struktura 3
21
1
1 GG
G
H1+1
Struktura 3: to kaskadowe połączenie bloków, które zastępujemy blokami.
21
1
1 GG
G
H1+1
21
111
1 GG
GHG
Otrzymujemy strukturę 4 złożoną z bloku i węzła sumacyjnego ze sprzężeniem
zwrotnym ujemnym.
Struktura 4
+
- 21
111
1 GG
GHG
Przyjmując:
(4.54)
otrzymujemy:
+
- Gb
Schematy blokowe układów automatykiStr.106

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
(4.55)
czyli ostatecznie mamy:
Przykład 2. Napisać transmitancję sieci.
G1 G2
G4
G3
G5
H
A
B + +
-
+
-
Struktura 1
Struktura 1: przenosimy węzeł informacyjny za blok:
G3 G3
A
a
a b
a
a
A’
b
13G
sygnały wyjściowe sygnały wyjściowe
(4.56)
(4.57)
Schematy blokowe układów automatykiStr.107

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
(4.58)
Stosując przeniesienie węzła za blok uzyskujemy pierwsze uproszczenia:
G1 G2
G4
G3
G5
H
B(A’)
Struktura 2
Struktura 3
X(s) Y(s)
3
4
G
G
Struktura 2 i 3: kaskadowe połączenie zastępujemy blokami.
Struktura 2.
G4 1
3G
3
4
G
G
Struktura 3.
G2 G3 G2G3
Stosując w miejsce połączeń kaskadowych bloki otrzymujemy drugie uproszczenie:
Schematy blokowe układów automatykiStr.108

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
G1 G2G3
G5
H
X(s) Y(s) +
+ -
Struktura 4
3
4
G
G
Struktura 4: ujemne sprzężenie zwrotne zastępujemy blokiem.
- G2G3
+
G5
532
32
1 GGG
GG
Po tym uproszczeniu mamy:
G1
H
Y(s) +
+ -
Struktura 5
532
32
1 GGG
GG
134GG
Schematy blokowe układów automatykiStr.109

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
Struktura 5: kaskadowe połączenie zastępujemy blokiem
G1 532
32
1 GGG
GG
432
32
1 GGG
GG
Po tym uproszczeniu mamy:
H
Y(s) +
+ -
X(s)
532
32
1 GGG
GG
134GG
Przyjmując:
oraz (4.59)
i przedstawiając węzeł sumacyjny trzysygnałowy jako dwa węzły sumacyjne
dwusygnałowe otrzymujemy:
T2
T1
H
Y(s) X(s) + +
- +
Struktura 6
Schematy blokowe układów automatykiStr.110

Nowoczesne metody prezentacji wiedzy w dydaktyce automatyki
Struktura 6: dodatnie sprzężenie zwrotne pośrednie zmieniamy na blok:
T2
T1
+
+ 21
1
1 TT
T
wprowadzając uproszczenia mamy:
H
+
-
X(s) Y(s)
21
1
1 TT
T
Układ z ujemnym sprzężeniem zwrotnym:
(4.60)
czyli ostatecznie układ można przedstawić za pomocą bloku o transmitancji
wypadkowej Gw:
Y(s) X(s)
121
1
1 HTTT
T
Schematy blokowe układów automatykiStr.111