Przestrzeń liniowa w fizyce - FIZYKA TEORETYCZNA
61
1 ################################################################################################# Przestrzeń liniowa (wektorowa ) i algebra liniowa w fizyce ( Wybrane zagadnienia ) ************************************************************************************************ R. Waligóra Pierwsze wersja : 2021 Ostatnia modyfikacja : 2021-02-15 ************************************************************************************************ I. Wprowadzenie. „Algebra liniowa jest jednocześnie jedną z najstarszych galęzi matematyki i jedną z najnowszych. Z jednej strony, znajdujemy u źródel matematyki zadania, które rozwiązuje się za pomocą jednego tylko mnożenia lub dzielenia, tzn. obliczenia pewnej wartości funkcji f(x) = ax, albo rozwiązania równania ax = b : są to typowe zadania algebry liniowej i nie można nimi się zajmować, ani nawet poprawnie ich postawić nie „myśląc liniowo” Elementy historii matematyki - N. Bourbaki PWN 1980 str. 76 – zobacz caly rozdzial poświęcony historycznemu rozwojowi pojęć algebry liniowej Pojęcie liniowości ( a dalej - przestrzeni liniowej ) jest pojęciem kluczowym dla calej matematyki, jak również dla jej zastosowań w fizyce. Wystarczy jedynie wspomnieć, że podstawową przestrzenią modelująca różnorodne procesy fizyczne jest przestrzeń liniowa (lub inaczej – przestrzeń wektorowa ), a jedną z podstawowych zasad fizycznych mającą bardzo szerokie zastosowanie jest zasada superpozycji, która jest wlaśnie konsekwencją przyjęcia modeli liniowych. Przykladowo przestrzeń Euklidesa jest przestrzenią liniową i jest to podstawowa przestrzeń używaną w mechanice klasycznej, przestrzeń Hilberta jest również przestrzenią liniową i jest to podstawowa przestrzeń używana w mechanice kwantowej, przestrzeń Minkowskiego jest przestrzenią liniową i jest to podstawowa przestrzeń używana w mechanice relatywistycznej – szczególnej teorii względności. Można powiedzieć, że liniowość jest pojęciem, które intuicyjnie dane jest nam poprzez codzienne doświadczenie. Rozpoczynając naukę matematyki spotykamy się wielokrotnie z takimi pojęciami jak : równanie liniowe, funkcja liniowa, kombinacja liniowa, zależność liniowa itp. Wszystkie te pojęcia wiążą się organicznie z dzialem matematyki zwanym „algebrą liniową”, który, to jest dzialem algebry ogólnej (algebry abstrakcyjnej. Elementarne pojęcia algebry liniowej byly obecne już u samych historycznych początków myśli matematycznej ( bardziej lub mniej sformalizowanej ) – chociażby w arytmetyce, czy geometrii wylożonej w „Elementach” Euklidesa. Dopiero jednak niedawno, bo w początkach XX wieku dostrzeżono jej pelną strukturę i dokonano dla niej procesu aksjomatyzacji. Podstawowym pojęciem algebry liniowej jest pojęcie „przestrzeni liniowej”. W praktyce fizycznej liniowość przejawia następująco. Rozpatrzmy bodziec o intensywności A oraz bodziec o intensywności B, zmierzony efekt dzialania bodźca A niech będzie mial wartość C, a bodźca B niech ma wartość D. Jeżeli teraz rozważymy wspólne dzialanie bodźców A i B, to jeżeli mają one ( wlaściwie chodzi o charakter liniowy calego ukladu na który dzialają bodźce ) charakter liniowy wtedy sumaryczny efekt będzie równy C + D. Przypadek drugi - jeżeli dzialamy bodźcem A, to w przypadku liniowym zwiększenie go k-krotnie powinno spowodować k-krotne zwiększenie jego efektu. Przypadek trzeci. Jeżeli na uklad dzialają jednocześnie bodźce kA i mB to skutek ich jednoczesnego dzialania w modelu liniowym będzie równy kC + mD. Oczywiście w powyższym przykladzie jako bodziec możemy rozpatrywać np. silę lub natężenie pola fizycznego – ogólnie wszystkich tych wielkości fizycznych, które modelowane są przez wektory i w zakresie odpowiedzi liniowej danego ukladu fizycznego. Modele liniowe mają bardzo szerokie zastosowania fizyczne. Są również najprostsze do analizy matematycznej. Mogą one być również przedstawiane w bardzo poglądowych schematach ( wykresach ) graficznych. Poszukując odpowiedniego matematycznego modelu dla zjawiska (teorii ) fizycznego ( opartego zazwyczaj na materiale eksperymentalnym, który zwykle formuluje się w jakiś roboczy model fenomenologiczny ) staramy się aby byl to model najprostszy, dobrze poznany tj. o znanych wlasnościach, o możliwych walorach reprezentacji poglądowej, oferujący silne i obszerne metody jego rozwiązania np. analityczne, geometryczne lub algebraiczne.
Transcript of Przestrzeń liniowa w fizyce - FIZYKA TEORETYCZNA
1
#################################################################################################
Przestrzeń liniowa (wektorowa ) i algebra liniowa w fizyce ( Wybrane zagadnienia ) *************************************************** ********************************************* R. Waligóra Pierwsze wersja : 2021 Ostatnia modyfikacja : 2021-02-15 *************************************************** ********************************************* I. Wprowadzenie. „Algebra liniowa jest jednocześnie jedną z najstarszych gałęzi matematyki i jedną z najnowszych. Z jednej strony, znajdujemy u źródeł matematyki zadania, które rozwiązuje się za pomocą jednego tylko mnożenia lub dzielenia, tzn. obliczenia pewnej wartości funkcji f(x) = ax, albo rozwiązania równania ax = b : są to typowe zadania algebry liniowej i nie można nimi się zajmować, ani nawet poprawnie ich postawić nie „myśląc liniowo” Elementy historii matematyki - N. Bourbaki PWN 1980 str. 76 – zobacz cały rozdział poświęcony historycznemu rozwojowi pojęć algebry liniowej Pojęcie liniowości ( a dalej - przestrzeni liniowej ) jest pojęciem kluczowym dla całej matematyki, jak również dla jej zastosowań w fizyce. Wystarczy jedynie wspomnieć, że podstawową przestrzenią modelująca różnorodne procesy fizyczne jest przestrzeń liniowa (lub inaczej – przestrzeń wektorowa ), a jedną z podstawowych zasad fizycznych mającą bardzo szerokie zastosowanie jest zasada superpozycji, która jest właśnie konsekwencją przyjęcia modeli liniowych. Przykładowo przestrzeń Euklidesa jest przestrzenią liniową i jest to podstawowa przestrzeń używaną w mechanice klasycznej, przestrzeń Hilberta jest również przestrzenią liniową i jest to podstawowa przestrzeń używana w mechanice kwantowej, przestrzeń Minkowskiego jest przestrzenią liniową i jest to podstawowa przestrzeń używana w mechanice relatywistycznej – szczególnej teorii względności. Można powiedzieć, że liniowość jest pojęciem, które intuicyjnie dane jest nam poprzez codzienne doświadczenie. Rozpoczynając naukę matematyki spotykamy się wielokrotnie z takimi pojęciami jak : równanie liniowe, funkcja liniowa, kombinacja liniowa, zależność liniowa itp. Wszystkie te pojęcia wiążą się organicznie z działem matematyki zwanym „algebrą liniową”, który, to jest działem algebry ogólnej (algebry abstrakcyjnej. Elementarne pojęcia algebry liniowej były obecne już u samych historycznych początków myśli matematycznej ( bardziej lub mniej sformalizowanej ) – chociażby w arytmetyce, czy geometrii wyłożonej w „Elementach” Euklidesa. Dopiero jednak niedawno, bo w początkach XX wieku dostrzeżono jej pełną strukturę i dokonano dla niej procesu aksjomatyzacji. Podstawowym pojęciem algebry liniowej jest pojęcie „przestrzeni liniowej”. W praktyce fizycznej liniowość przejawia następująco. Rozpatrzmy bodziec o intensywności A oraz bodziec o intensywności B, zmierzony efekt działania bodźca A niech będzie miał wartość C, a bodźca B niech ma wartość D. Jeżeli teraz rozważymy wspólne działanie bodźców A i B, to jeżeli mają one ( właściwie chodzi o charakter liniowy całego układu na który działają bodźce ) charakter liniowy wtedy sumaryczny efekt będzie równy C + D. Przypadek drugi - jeżeli działamy bodźcem A, to w przypadku liniowym zwiększenie go k-krotnie powinno spowodować k-krotne zwiększenie jego efektu. Przypadek trzeci. Jeżeli na układ działają jednocześnie bodźce kA i mB to skutek ich jednoczesnego działania w modelu liniowym będzie równy kC + mD. Oczywiście w powyższym przykładzie jako bodziec możemy rozpatrywać np. siłę lub natężenie pola fizycznego – ogólnie wszystkich tych wielkości fizycznych, które modelowane są przez wektory i w zakresie odpowiedzi liniowej danego układu fizycznego. Modele liniowe mają bardzo szerokie zastosowania fizyczne. Są również najprostsze do analizy matematycznej. Mogą one być również przedstawiane w bardzo poglądowych schematach ( wykresach ) graficznych. Poszukując odpowiedniego matematycznego modelu dla zjawiska (teorii ) fizycznego ( opartego zazwyczaj na materiale eksperymentalnym, który zwykle formułuje się w jakiś roboczy model fenomenologiczny ) staramy się aby był to model najprostszy, dobrze poznany tj. o znanych własnościach, o możliwych walorach reprezentacji poglądowej, oferujący silne i obszerne metody jego rozwiązania np. analityczne, geometryczne lub algebraiczne.
2
Poprzez taki pryzmat zazwyczaj w pierwszym kroku wybieramy model oparty o pewną przestrzeń liniową – rzeczywistą lub zespoloną, skończenie lub nieskończenie wymiarową, unormowaną lub nie unormowaną. Tak jest w przypadku mechaniki analitycznej, której przestrzenią modelująca jest np. przestrzeń fazowa, jak również dla mechaniki kwantowej opartej na przestrzeni Hilberta. Przestrzenie liniowe składają się z elementów, nazywanych wektorami. Wektory – są to abstrakcyjne obiekty matematyczne, ale jak podpowiada ich nazwa, można je sobie wyobrazić w postaci wektorów geometrycznych. Tak samo jak zwykłe liczby, wektory można wzajemnie dodawać, oraz odejmować jeden od drugiego, można je również mnożyć przez liczby - ogólnie nazywane skalarami, bowiem przestrzenie liniowe mogą być definiowane nie tylko nad zbiorem liczb rzeczywistych. Jednakże wektorów nie można mnożyć przez siebie i dzielić w taki sam sposób jak robimy to ze zwykłymi liczbami. Jedna z własności charakterystycznych algebry liniowej, wykorzystywanej w MQ, jest stosowanie tzw. symboli Diraca
dla wektorów. Przy oznaczaniu wektora, w miejsce tego, aby zapisywać np. a lub a→, piszemy | a >.
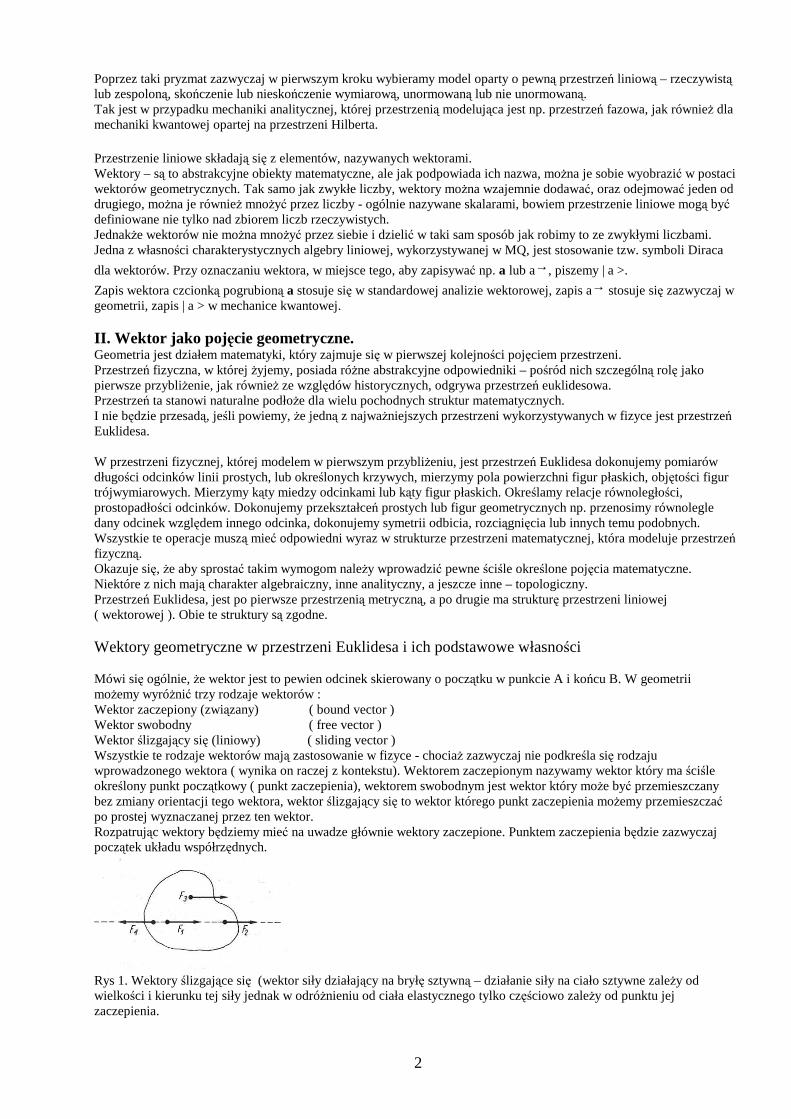
Zapis wektora czcionką pogrubioną a stosuje się w standardowej analizie wektorowej, zapis a→ stosuje się zazwyczaj w geometrii, zapis | a > w mechanice kwantowej. II. Wektor jako poj ęcie geometryczne. Geometria jest działem matematyki, który zajmuje się w pierwszej kolejności pojęciem przestrzeni. Przestrzeń fizyczna, w której żyjemy, posiada różne abstrakcyjne odpowiedniki – pośród nich szczególną rolę jako pierwsze przybliżenie, jak również ze względów historycznych, odgrywa przestrzeń euklidesowa. Przestrzeń ta stanowi naturalne podłoże dla wielu pochodnych struktur matematycznych. I nie będzie przesadą, jeśli powiemy, że jedną z najważniejszych przestrzeni wykorzystywanych w fizyce jest przestrzeń Euklidesa. W przestrzeni fizycznej, której modelem w pierwszym przybliżeniu, jest przestrzeń Euklidesa dokonujemy pomiarów długości odcinków linii prostych, lub określonych krzywych, mierzymy pola powierzchni figur płaskich, objętości figur trójwymiarowych. Mierzymy kąty miedzy odcinkami lub kąty figur płaskich. Określamy relacje równoległości, prostopadłości odcinków. Dokonujemy przekształceń prostych lub figur geometrycznych np. przenosimy równolegle dany odcinek względem innego odcinka, dokonujemy symetrii odbicia, rozciągnięcia lub innych temu podobnych. Wszystkie te operacje muszą mieć odpowiedni wyraz w strukturze przestrzeni matematycznej, która modeluje przestrzeń fizyczną. Okazuje się, że aby sprostać takim wymogom należy wprowadzić pewne ściśle określone pojęcia matematyczne. Niektóre z nich mają charakter algebraiczny, inne analityczny, a jeszcze inne – topologiczny. Przestrzeń Euklidesa, jest po pierwsze przestrzenią metryczną, a po drugie ma strukturę przestrzeni liniowej ( wektorowej ). Obie te struktury są zgodne. Wektory geometryczne w przestrzeni Euklidesa i ich podstawowe własności Mówi się ogólnie, że wektor jest to pewien odcinek skierowany o początku w punkcie A i końcu B. W geometrii możemy wyróżnić trzy rodzaje wektorów : Wektor zaczepiony (związany) ( bound vector ) Wektor swobodny ( free vector ) Wektor ślizgający się (liniowy) ( sliding vector ) Wszystkie te rodzaje wektorów mają zastosowanie w fizyce - chociaż zazwyczaj nie podkreśla się rodzaju wprowadzonego wektora ( wynika on raczej z kontekstu). Wektorem zaczepionym nazywamy wektor który ma ściśle określony punkt początkowy ( punkt zaczepienia), wektorem swobodnym jest wektor który może być przemieszczany bez zmiany orientacji tego wektora, wektor ślizgający się to wektor którego punkt zaczepienia możemy przemieszczać po prostej wyznaczanej przez ten wektor. Rozpatrując wektory będziemy mieć na uwadze głównie wektory zaczepione. Punktem zaczepienia będzie zazwyczaj początek układu współrzędnych.
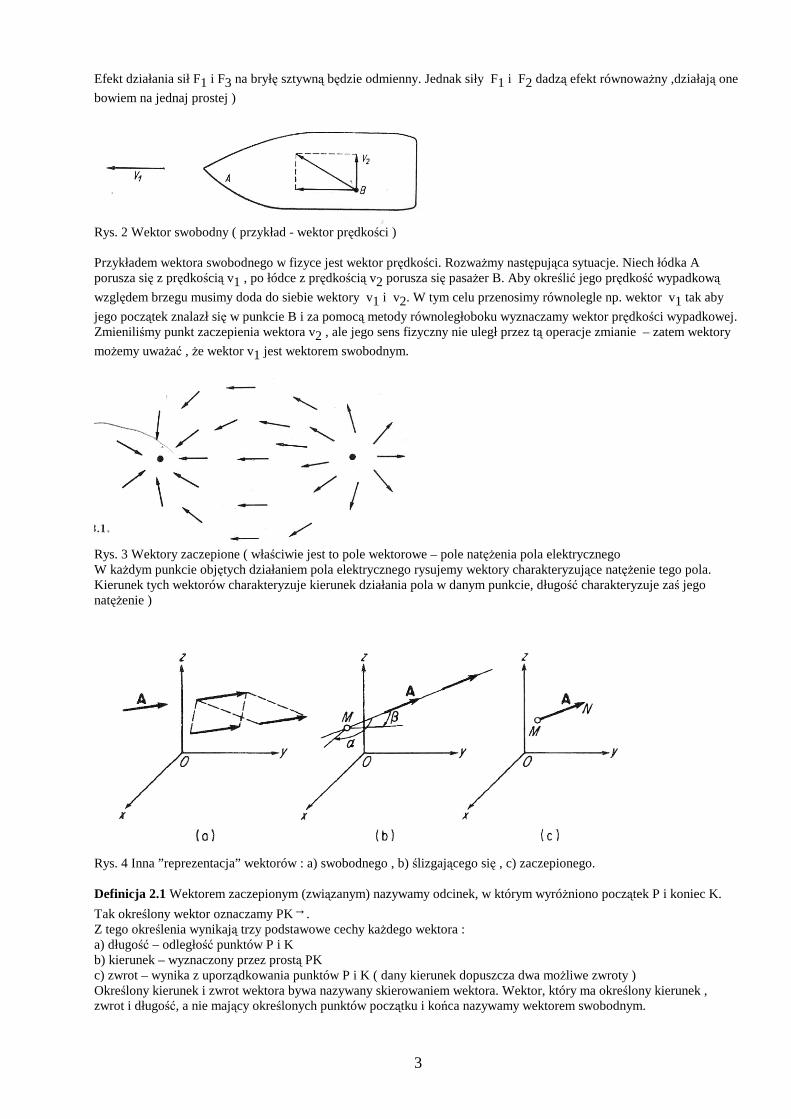
Rys 1. Wektory ślizgające się (wektor siły działający na bryłę sztywną – działanie siły na ciało sztywne zależy od wielkości i kierunku tej siły jednak w odróżnieniu od ciała elastycznego tylko częściowo zależy od punktu jej zaczepienia.
3
Efekt działania sił F1 i F3 na bryłę sztywną będzie odmienny. Jednak siły F1 i F2 dadzą efekt równoważny ,działają one
bowiem na jednaj prostej )
Rys. 2 Wektor swobodny ( przykład - wektor prędkości ) Przykładem wektora swobodnego w fizyce jest wektor prędkości. Rozważmy następująca sytuacje. Niech łódka A porusza się z prędkością v1 , po łódce z prędkością v2 porusza się pasażer B. Aby określić jego prędkość wypadkową
względem brzegu musimy doda do siebie wektory v1 i v2. W tym celu przenosimy równolegle np. wektor v1 tak aby
jego początek znalazł się w punkcie B i za pomocą metody równoległoboku wyznaczamy wektor prędkości wypadkowej. Zmieniliśmy punkt zaczepienia wektora v2 , ale jego sens fizyczny nie uległ przez tą operacje zmianie – zatem wektory
możemy uważać , że wektor v1 jest wektorem swobodnym.
Rys. 3 Wektory zaczepione ( właściwie jest to pole wektorowe – pole natężenia pola elektrycznego W każdym punkcie objętych działaniem pola elektrycznego rysujemy wektory charakteryzujące natężenie tego pola. Kierunek tych wektorów charakteryzuje kierunek działania pola w danym punkcie, długość charakteryzuje zaś jego natężenie )
Rys. 4 Inna ”reprezentacja” wektorów : a) swobodnego , b) ślizgającego się , c) zaczepionego. Definicja 2.1 Wektorem zaczepionym (związanym) nazywamy odcinek, w którym wyróżniono początek P i koniec K.
Tak określony wektor oznaczamy PK→. Z tego określenia wynikają trzy podstawowe cechy każdego wektora : a) długość – odległość punktów P i K b) kierunek – wyznaczony przez prostą PK c) zwrot – wynika z uporządkowania punktów P i K ( dany kierunek dopuszcza dwa możliwe zwroty ) Określony kierunek i zwrot wektora bywa nazywany skierowaniem wektora. Wektor, który ma określony kierunek , zwrot i długość, a nie mający określonych punktów początku i końca nazywamy wektorem swobodnym.
4
Wektor swobodny oznaczamy czcionka pogrubioną np. A, a, α, γ … Punkt (geometryczny ) możemy utożsamić z wektorem o identycznym początku i końcu ( punkty P i K pokrywają się ). Taki wektor jest nazywany wektorem zerowym. Wektor zerowy nie ma ani kierunku ani zwrotu.
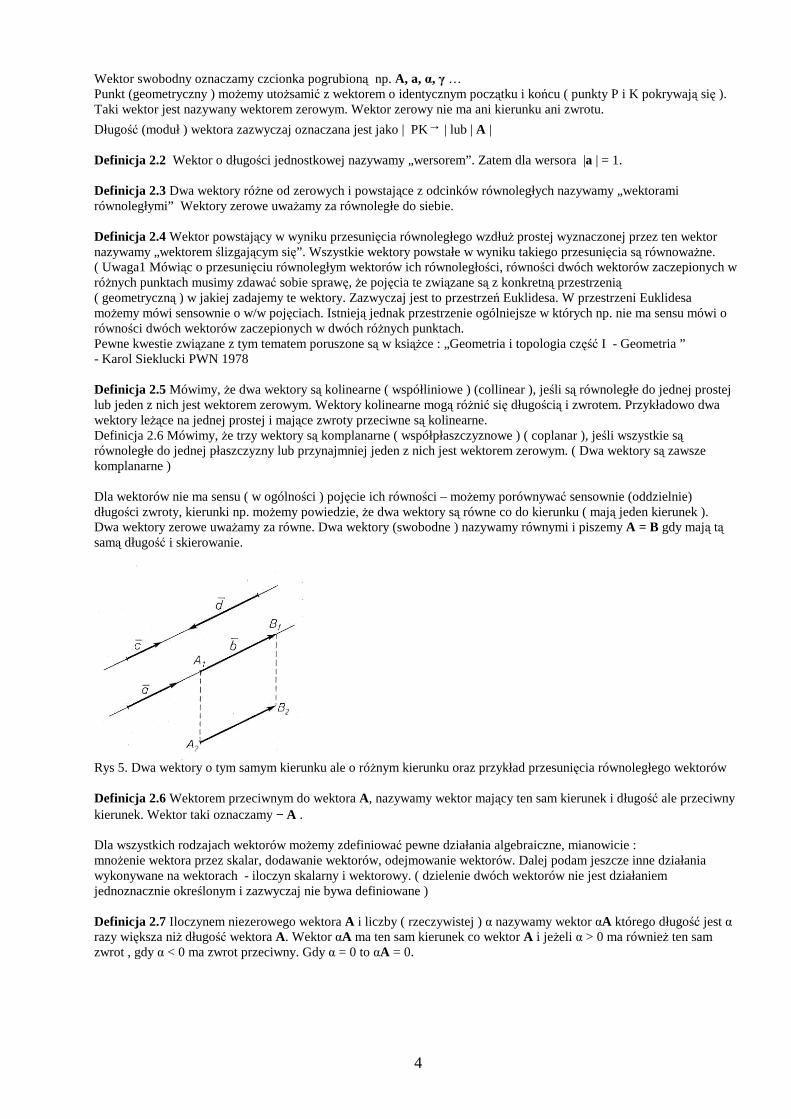
Długość (moduł ) wektora zazwyczaj oznaczana jest jako | PK→ | lub | A | Definicja 2.2 Wektor o długości jednostkowej nazywamy „wersorem”. Zatem dla wersora |a | = 1. Definicja 2.3 Dwa wektory różne od zerowych i powstające z odcinków równoległych nazywamy „wektorami równoległymi” Wektory zerowe uważamy za równoległe do siebie. Definicja 2.4 Wektor powstający w wyniku przesunięcia równoległego wzdłuż prostej wyznaczonej przez ten wektor nazywamy „wektorem ślizgającym się”. Wszystkie wektory powstałe w wyniku takiego przesunięcia są równoważne. ( Uwaga1 Mówiąc o przesunięciu równoległym wektorów ich równoległości, równości dwóch wektorów zaczepionych w różnych punktach musimy zdawać sobie sprawę, że pojęcia te związane są z konkretną przestrzenią ( geometryczną ) w jakiej zadajemy te wektory. Zazwyczaj jest to przestrzeń Euklidesa. W przestrzeni Euklidesa możemy mówi sensownie o w/w pojęciach. Istnieją jednak przestrzenie ogólniejsze w których np. nie ma sensu mówi o równości dwóch wektorów zaczepionych w dwóch różnych punktach. Pewne kwestie związane z tym tematem poruszone są w książce : „Geometria i topologia część I - Geometria ” - Karol Sieklucki PWN 1978 Definicja 2.5 Mówimy, że dwa wektory są kolinearne ( współliniowe ) (collinear ), jeśli są równoległe do jednej prostej lub jeden z nich jest wektorem zerowym. Wektory kolinearne mogą różnić się długością i zwrotem. Przykładowo dwa wektory leżące na jednej prostej i mające zwroty przeciwne są kolinearne. Definicja 2.6 Mówimy, że trzy wektory są komplanarne ( współpłaszczyznowe ) ( coplanar ), jeśli wszystkie są równoległe do jednej płaszczyzny lub przynajmniej jeden z nich jest wektorem zerowym. ( Dwa wektory są zawsze komplanarne ) Dla wektorów nie ma sensu ( w ogólności ) pojęcie ich równości – możemy porównywać sensownie (oddzielnie) długości zwroty, kierunki np. możemy powiedzie, że dwa wektory są równe co do kierunku ( mają jeden kierunek ). Dwa wektory zerowe uważamy za równe. Dwa wektory (swobodne ) nazywamy równymi i piszemy A = B gdy mają tą samą długość i skierowanie.
Rys 5. Dwa wektory o tym samym kierunku ale o różnym kierunku oraz przykład przesunięcia równoległego wektorów Definicja 2.6 Wektorem przeciwnym do wektora A, nazywamy wektor mający ten sam kierunek i długość ale przeciwny kierunek. Wektor taki oznaczamy − A . Dla wszystkich rodzajach wektorów możemy zdefiniować pewne działania algebraiczne, mianowicie : mnożenie wektora przez skalar, dodawanie wektorów, odejmowanie wektorów. Dalej podam jeszcze inne działania wykonywane na wektorach - iloczyn skalarny i wektorowy. ( dzielenie dwóch wektorów nie jest działaniem jednoznacznie określonym i zazwyczaj nie bywa definiowane ) Definicja 2.7 Iloczynem niezerowego wektora A i liczby ( rzeczywistej ) α nazywamy wektor αA którego długość jest α razy większa niż długość wektora A. Wektor αA ma ten sam kierunek co wektor A i jeżeli α > 0 ma również ten sam zwrot , gdy α < 0 ma zwrot przeciwny. Gdy α = 0 to αA = 0.
5
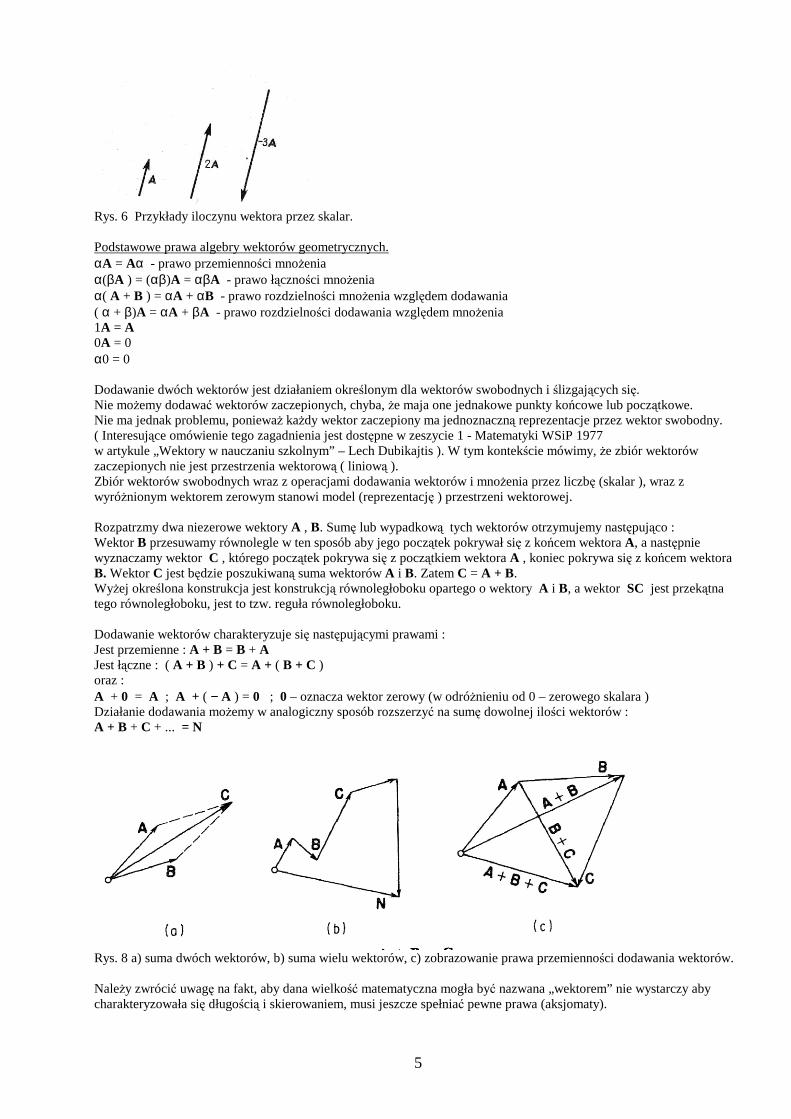
Rys. 6 Przykłady iloczynu wektora przez skalar. Podstawowe prawa algebry wektorów geometrycznych. αA = Aα - prawo przemienności mnożenia α(βA ) = (αβ)A = αβA - prawo łączności mnożenia α( A + B ) = αA + αB - prawo rozdzielności mnożenia względem dodawania ( α + β)A = αA + βA - prawo rozdzielności dodawania względem mnożenia 1A = A 0A = 0 α0 = 0 Dodawanie dwóch wektorów jest działaniem określonym dla wektorów swobodnych i ślizgających się. Nie możemy dodawać wektorów zaczepionych, chyba, że maja one jednakowe punkty końcowe lub początkowe. Nie ma jednak problemu, ponieważ każdy wektor zaczepiony ma jednoznaczną reprezentacje przez wektor swobodny. ( Interesujące omówienie tego zagadnienia jest dostępne w zeszycie 1 - Matematyki WSiP 1977 w artykule „Wektory w nauczaniu szkolnym” – Lech Dubikajtis ). W tym kontekście mówimy, że zbiór wektorów zaczepionych nie jest przestrzenia wektorową ( liniową ). Zbiór wektorów swobodnych wraz z operacjami dodawania wektorów i mnożenia przez liczbę (skalar ), wraz z wyróżnionym wektorem zerowym stanowi model (reprezentację ) przestrzeni wektorowej. Rozpatrzmy dwa niezerowe wektory A , B. Sumę lub wypadkową tych wektorów otrzymujemy następująco : Wektor B przesuwamy równolegle w ten sposób aby jego początek pokrywał się z końcem wektora A, a następnie wyznaczamy wektor C , którego początek pokrywa się z początkiem wektora A , koniec pokrywa się z końcem wektora B. Wektor C jest będzie poszukiwaną suma wektorów A i B. Zatem C = A + B. Wyżej określona konstrukcja jest konstrukcją równoległoboku opartego o wektory A i B, a wektor SC jest przekątna tego równoległoboku, jest to tzw. reguła równoległoboku. Dodawanie wektorów charakteryzuje się następującymi prawami : Jest przemienne : A + B = B + A Jest łączne : ( A + B ) + C = A + ( B + C ) oraz : A + 0 = A ; A + ( − A ) = 0 ; 0 – oznacza wektor zerowy (w odróżnieniu od 0 – zerowego skalara ) Działanie dodawania możemy w analogiczny sposób rozszerzyć na sumę dowolnej ilości wektorów : A + B + C + ... = N
Rys. 8 a) suma dwóch wektorów, b) suma wielu wektorów, c) zobrazowanie prawa przemienności dodawania wektorów. Należy zwrócić uwagę na fakt, aby dana wielkość matematyczna mogła być nazwana „wektorem” nie wystarczy aby charakteryzowała się długością i skierowaniem, musi jeszcze spełniać pewne prawa (aksjomaty).
6
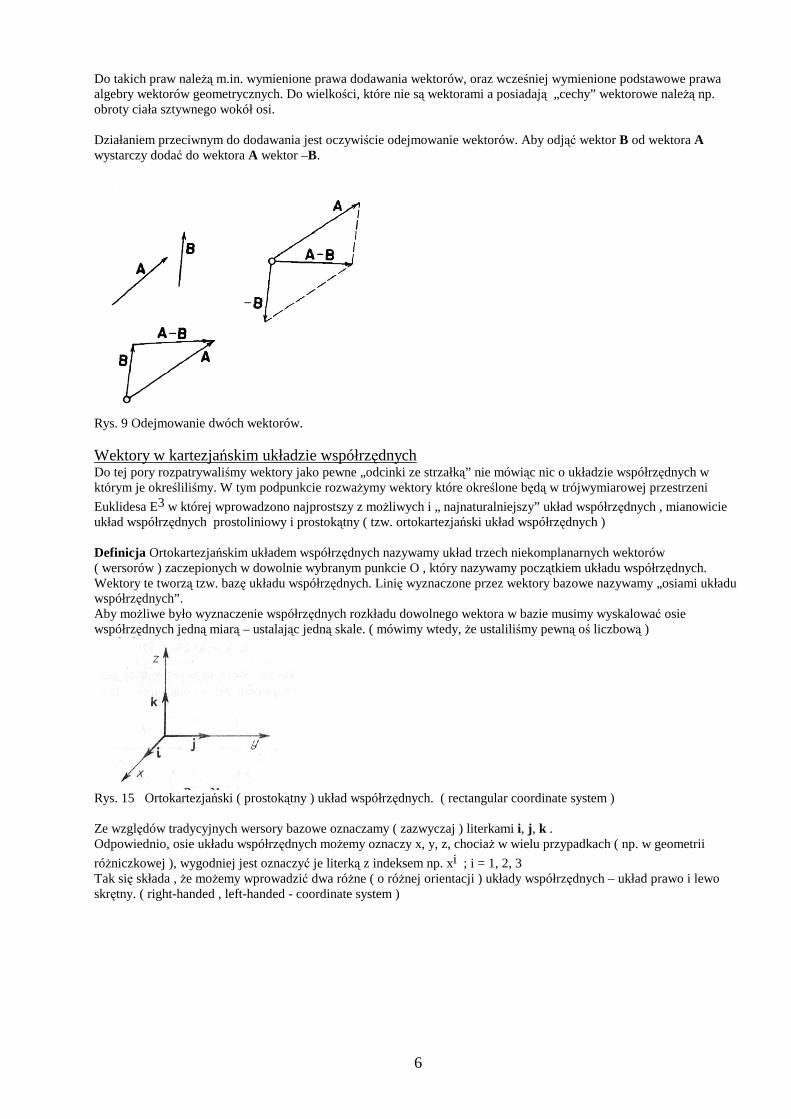
Do takich praw należą m.in. wymienione prawa dodawania wektorów, oraz wcześniej wymienione podstawowe prawa algebry wektorów geometrycznych. Do wielkości, które nie są wektorami a posiadają „cechy” wektorowe należą np. obroty ciała sztywnego wokół osi. Działaniem przeciwnym do dodawania jest oczywiście odejmowanie wektorów. Aby odjąć wektor B od wektora A wystarczy dodać do wektora A wektor –B.
Rys. 9 Odejmowanie dwóch wektorów. Wektory w kartezjańskim układzie współrzędnych Do tej pory rozpatrywaliśmy wektory jako pewne „odcinki ze strzałką” nie mówiąc nic o układzie współrzędnych w którym je określili śmy. W tym podpunkcie rozważymy wektory które określone będą w trójwymiarowej przestrzeni
Euklidesa E3 w której wprowadzono najprostszy z możliwych i „ najnaturalniejszy” układ współrzędnych , mianowicie układ współrzędnych prostoliniowy i prostokątny ( tzw. ortokartezjański układ współrzędnych ) Definicja Ortokartezjańskim układem współrzędnych nazywamy układ trzech niekomplanarnych wektorów ( wersorów ) zaczepionych w dowolnie wybranym punkcie O , który nazywamy początkiem układu współrzędnych. Wektory te tworzą tzw. bazę układu współrzędnych. Linię wyznaczone przez wektory bazowe nazywamy „osiami układu współrzędnych”. Aby możliwe było wyznaczenie współrzędnych rozkładu dowolnego wektora w bazie musimy wyskalować osie współrzędnych jedną miarą – ustalając jedną skale. ( mówimy wtedy, że ustaliliśmy pewną oś liczbową )
Rys. 15 Ortokartezjański ( prostokątny ) układ współrzędnych. ( rectangular coordinate system ) Ze względów tradycyjnych wersory bazowe oznaczamy ( zazwyczaj ) literkami i, j , k . Odpowiednio, osie układu współrzędnych możemy oznaczy x, y, z, chociaż w wielu przypadkach ( np. w geometrii
różniczkowej ), wygodniej jest oznaczyć je literką z indeksem np. xi ; i = 1, 2, 3 Tak się składa , że możemy wprowadzić dwa różne ( o różnej orientacji ) układy współrzędnych – układ prawo i lewo skrętny. ( right-handed , left-handed - coordinate system )
7
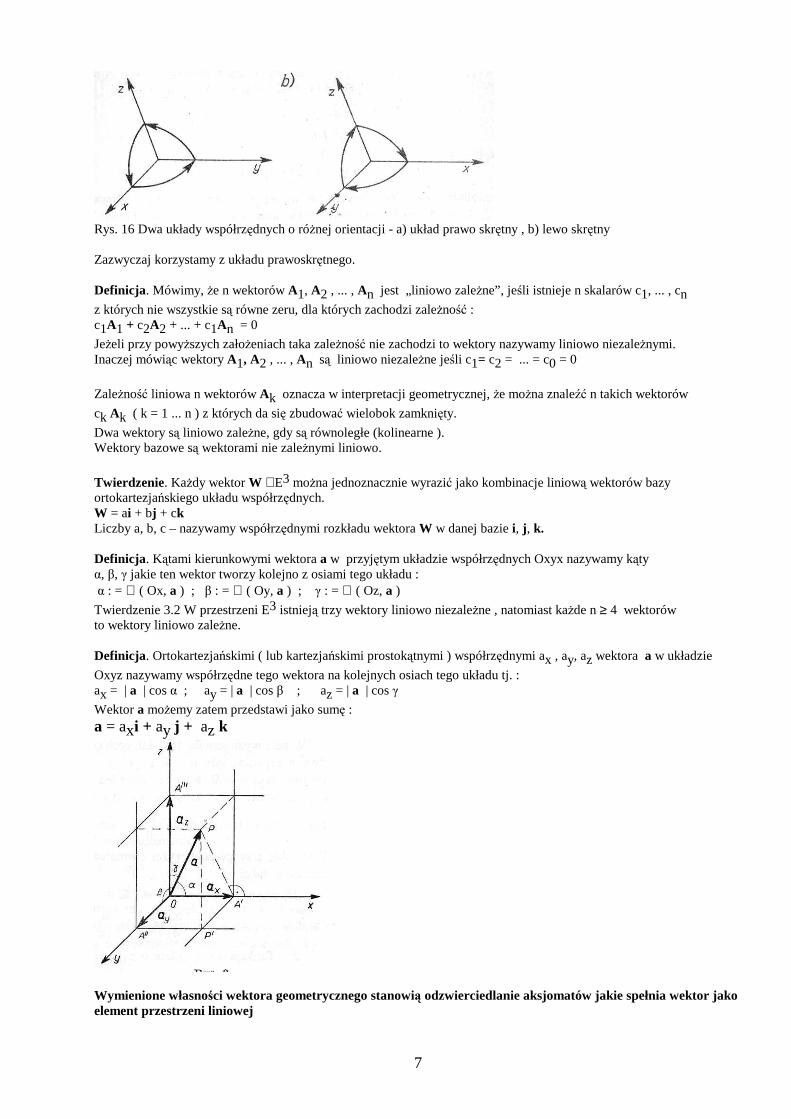
Rys. 16 Dwa układy współrzędnych o różnej orientacji - a) układ prawo skrętny , b) lewo skrętny Zazwyczaj korzystamy z układu prawoskrętnego. Definicja. Mówimy, że n wektorów A1, A2 , ... , An jest „liniowo zależne”, jeśli istnieje n skalarów c1, ... , cn
z których nie wszystkie są równe zeru, dla których zachodzi zależność : c1A1 + c2A2 + ... + c1An = 0
Jeżeli przy powyższych założeniach taka zależność nie zachodzi to wektory nazywamy liniowo niezależnymi. Inaczej mówiąc wektory A1, A2 , ... , An są liniowo niezależne jeśli c1= c2 = ... = c0 = 0
Zależność liniowa n wektorów Ak oznacza w interpretacji geometrycznej, że można znaleźć n takich wektorów
ck Ak ( k = 1 ... n ) z których da się zbudować wielobok zamknięty.
Dwa wektory są liniowo zależne, gdy są równoległe (kolinearne ). Wektory bazowe są wektorami nie zależnymi liniowo.
Twierdzenie. Każdy wektor W ∈E3 można jednoznacznie wyrazić jako kombinacje liniową wektorów bazy ortokartezjańskiego układu współrzędnych. W = ai + bj + ck Liczby a, b, c – nazywamy współrzędnymi rozkładu wektora W w danej bazie i, j , k. Definicja. Kątami kierunkowymi wektora a w przyjętym układzie współrzędnych Oxyx nazywamy kąty α, β, γ jakie ten wektor tworzy kolejno z osiami tego układu : α : = ∠ ( Ox, a ) ; β : = ∠ ( Oy, a ) ; γ : = ∠ ( Oz, a )
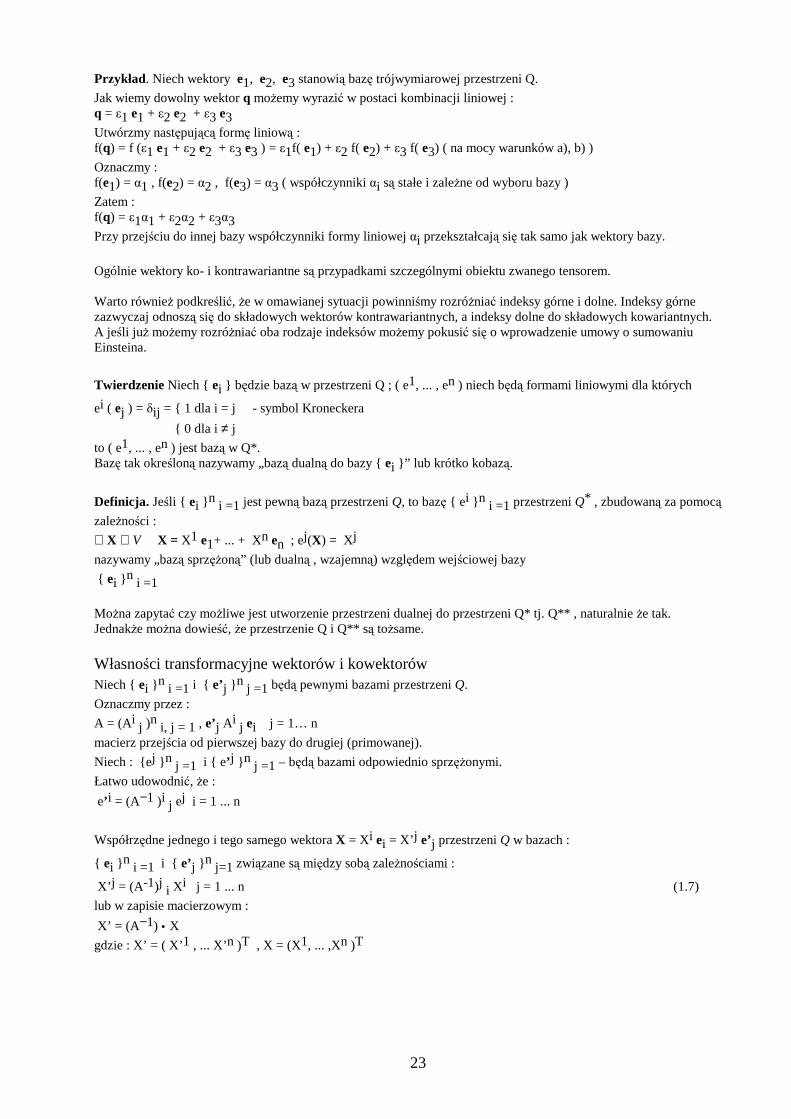
Twierdzenie 3.2 W przestrzeni E3 istnieją trzy wektory liniowo niezależne , natomiast każde n ≥ 4 wektorów to wektory liniowo zależne. Definicja. Ortokartezjańskimi ( lub kartezjańskimi prostokątnymi ) współrzędnymi ax , ay, az wektora a w układzie
Oxyz nazywamy współrzędne tego wektora na kolejnych osiach tego układu tj. : ax = | a | cos α ; ay = | a | cos β ; az = | a | cos γ
Wektor a możemy zatem przedstawi jako sumę : a = axi + ay j + az k
Wymienione własności wektora geometrycznego stanowią odzwierciedlanie aksjomatów jakie spełnia wektor jako element przestrzeni liniowej

8
III. Wektor jako element przestrzeni liniowej. Definicja przestrzeni wektorowej Przestrzeń liniowa (wektorowa ) stanowi przykład ogólnej struktury algebraicznej. Na początku jednak zdefiniujemy tę przestrzeń jako samodzielną strukturę matematyczną, tak aby w jej aksjomatyce znalazło odbicie wszystko to co powiedziano o wektorach jako obiektach geometrycznych. Oczywiście wektory geometryczne nie są jedynymi przykładami „realizacji” aksjomatów przestrzeni liniowej. Przestrzeń liniową mogą również tworzyć np. macierze (nieosobliwe, kwadratowe ) lub wielomiany. Definicja 3.1 Przestrzenią liniową, nazywamy zbiór Q ( składający się z dowolnych elementów, skończony lub nieskończony, przeliczalny lub nieprzeliczalny – na początek niech będzie to zbiór skończony ) w którym zostały określone dwa następujące działania : a) działanie „dodawania” tzn. każdym dwóm elementom q1, q2 ∈ Q przyporządkowany jest jednoznacznie jeden i tylko
jeden element s ∈ Q zwany „sumą elementów q1i q2”.
Sumę s możemy symbolicznie określić znakiem + lub ⊕ lub jakimś dowolnie innym b) działanie „mnożenia” przez liczby ( rzeczywiste lub zespolone ) tzn. każdemu elementowi q ∈ Q i każdej liczbie λ przyporządkowany jest jednoznacznie element qλ zwany „iloczynem liczby λ i elementu q” , wprowadzony iloczyn jest działaniem wewnętrznym tj. qλ ∈ Q. Iloczyn możemy symbolicznie określić znakiem • lub ⊗. Wymienione działania muszą spełniać następujące warunki ( są to aksjomaty przestrzeni liniowej ) : a) q1+ q2 = q2 + q1 ( przemienność dodawania )
b) (q1+ q2 ) + q3 = q1+ ( q2 + q3 ) ( łączność dodawania )
c) Istnieje element 0 ∈ Q taki, że q + 0 = q dla każdego q ∈ Q. Element ten nazywamy „elementem zerowym” d) Dla każdego q ∈Q istnieje element oznaczany – q i – q ∈ Q taki, że q + ( −q ) = 0. Element – q nazywamy elementem przeciwnym do elementu q. e) Istnieje element e taki, że e • q = q , e ∈ Q. Element ten nazywamy „elementem jednostkowym“. f) λ1( λ2 q ) = λ1λ2 ( q ) , λ1, λ2 – liczby rzeczywiste lub zespolone.
g) ( λ1 + λ2 ) q = λ1q + λ2 q )
h) λ ( q1 + q2 ) = λ q1 + λ q2
Jak widać z powyższej definicji przestrzeń liniowa określana jest poprzez ustalenie pewnego zbioru i działań które mogą być wykonywane na elementach tego zbioru. Pojęcie przestrzeni liniowej jest bardzo blisko spokrewnione z alogicznymi pojęciami geometrycznymi ( od czasów Kartezjusza wiadomo, że istnieje ścisły związek między algebrą i geometrią ). Elementy zbioru Q nazywamy „wektorami”, a przestrzeń liniowa bywa bardzo często nazywana przestrzenią wektorową. Jeżeli dla wektorów przestrzeni Q określone jest mnożenie przez liczby rzeczywiste (ogólnie mówimy o mnożeniu przez skalary tj. elementy należące do ciała liczbowego nad którym budujemy daną przestrzeń liniową ), to Q nazwiemy przestrzenią liniową nad ciałem liczb rzeczywistych ( analogiczne określenie wypowiemy dla ciała liczb zespolonych ). Ogólnie mówi się o przestrzeni liniowej Q nad ciałem K. Samą przestrzeń można oznaczać inaczej niż Q, np. V (vector space ), L ( linear space ) Jeśli nie będzie to wyraźnie powiedziane pod pojęciem przestrzeń będziemy rozumieli przestrzeń liniową nad ciałem liczb rzeczywistych R tj. przestrzeń liniową rzeczywistą, skończenie wymiarową : dim Q = n (o przeliczalnej bazie ). W mechanice kwantowej jednakże przestrzeń wektorowa jest przestrzenią określoną nad ciałem liczb zespolonych i standardowo jej wymiar jest nieskończony ( przeliczalny, lub nieprzeliczalny ) Zazwyczaj też będziemy zapisywali wektory czcionką pogrubioną i literami łacińskimi np. u, v, w ... , a skalary czcionką zwykłą i literami greckimi : α, β, γ , ... Przykładowo : e1, ... ,en – zbiór wektorów z danej przestrzeni wektorowej Q
λ1, ... ,λn – zbiór skalarów należących np. do ciała liczbowego R
Z przyjętej aksjomatyki przestrzeni liniowej możemy wyprowadzić pewne ogólne wnioski. Twierdzenie 3.1 W każdej przestrzeni liniowej istnieje tylko jeden wektor zerowy. Twierdzenie 3.2 Dla dowolnego wektora w istnieje tylko jeden wektor przeciwny. Twierdzenie 3.3 Iloczyn dowolnego wektora x przez liczbę –1 jest równy wektorowi przeciwnemu do x tj. (−1)x = − x Twierdzenie 3.4 Iloczyn wektora zerowego przez dowolną liczbę różną od zera jest wektorem zerowym. Twierdzenie 3.5 W przestrzeni liniowej możemy określić działanie odejmowania. Wektor c nazwiemy „różnicą” wektora a i wektora b jeśli c + b = a tj. c = a – b
9
Przestrzeń wektorowa dla „mechanika” kwantowego : Definicja A.1 Przestrzenią liniową (wektorową) V nad ciałem F ( ciało jest to pojecie algebraiczne, oznaczające zbiór zupełny pewnych liczb. Przykładami ciał są zbiory liczb wymiernych Q, rzeczywistych R, zespolonych C. Mechanika kwantowa zazwyczaj ma do czynienia z przestrzeniami wektorowymi nad ciałem liczb zespolonych ) nazywamy zbiór, w którym określone zostały następujące operacje : 1. Dodawanie : dla dowolnych dwóch wektorów | a > , | b > ∈ V, istnieje jednoznacznie określony wektor ∈ V, który nazywa się sumą tych wektorów i oznaczany jest jako | a > + | b >. 2. Mnożenie przez liczbę ( skalar ) : dla dowolnego wektora | a > ∈ V, i dowolnej liczby λ ∈ F, istnieje jednoznacznie określony wektor ∈ V, który nazywa się ich iloczynem i jest oznaczany jako λ | a > ≡ | a > λ. Operacje te spełniają następujące aksjomaty : 1. Przemienność dodawania : | a > + | b > = | b > + | a > 2. łączność dodawanie : ( | a > + | b > ) + | c > = | a > + ( | b > + | c > ) 3. Istnienie zera : istnieje element V, nazywany | zero >, taki że dla dowolnego wektora | a > spełnione jest : | a > + | zero > = | a > ( Uwaga. W charakterze alternatywnej notacji dla | zero > będziemy wykorzystywali 0, ale nigdy nie | 0 > ) 4. Istnienie elementu przeciwnego : dla dowolnego wektora | a > istnieje drugi wektor, oznaczany − | a >, taki, że : | a > + ( − | a > ) = | zero > 5. Przemienność sum wektorowych : λ ( | a > + | b > ) = λ | a > + λ | b > 6. Przemienność sum skalarnych : ( λ + µ ) | a > = λ | a > + µ | a > 7. Łączność mnożenia skalarnego : λ ( µ | a > ) = ( λµ ) | a > 8. Unitarność mnożenia skalarnego : dla dowolnego wektora | a > i liczby 1 ∈ F spełnione jest : 1 • | a > = | a > Definicja. Odejmowanie wektorów w przestrzeni liniowej definiuje się tak : | a > − | b > ≡ | a > + ( − | b > ) Ćwiczenie Dowieść następujących stwierdzeń : a) w przestrzeni liniowej istnieje tylko jeden element zerowy. b) jeśli | a > + | x > = | a >, dla pewnego | a > ∈ V, to | x > = | zero > c) dla dowolnego wektora | a > i liczby 0 ∈ F, słuszna jest równość : 0 | a > = | zero > d) − | a > = −1 | a > e) − | zero > = | zero > f) dla dowolnego | a > wektor − | a > jest jednoznaczny g) − ( − | a > )) = | a > h) | a > = | b > wtedy i tylko wtedy, kiedy | a > − | b > = 0. Mechanika kwantowa. Wprowadzenie na przykładzie fotonów – A. I. Lwowskij Przestrzeń wektorowa dla „mechanika” klasycznego : Definicja 1. Rozpatrzmy zbiór V, elementy którego można wzajemnie dodawać i mnożyć przez liczby. V będziemy nazywali przestrzenią wektorową, a jej elementy – wektorami. Dokładny sens takiego stwierdzenia jest następujący. Dla dowolnych dwóch a, b ∈ V istnieje wektor c ∈ V (nazywa się on sumą wektorów a i b i jest oznaczany jako a + b ) i dla dowolnego wektora a ∈ V i dowolnej liczby rzeczywistej λ istnieje wektor należący do V ( wektor ten nazywa się iloczynem wektora a przez liczbę λ i jest oznaczany jako λa ). Operacje dodawania dwóch wektorów i mnożenia wektora przez liczbę są określone w sposób jednoznaczny i spełniają następujące warunki : 1) a + b = b + a 2) a + ( b + c ) = (a + b ) + c 3) Istnieje taki wektor 0, że 0 + a = a. Wektor 0 nazywa się wektorem zerowym.

10
Można pokazać, że 0 jest jedynym takim wektorem. W istocie, niech istnieją dwa wektory zerowe 01 i 02 tj. 01 + a = a i 02 + a = a.
Podstawienie a = 01 do 02 + a = a daje 02 + 01 = 01, a podstawienie a = 02 do 01 + a = a daje 01 + 02 = 02, a
zatem : 01 = 02 4) Dla każdego wektora a istnieje wektor −a, taki że a + ( −a ) = 0. Zauważmy, że wektor −a jest jednoznaczny dla każdego a w tym sensie, że z a + b = 0 wynika b = c. W istocie b = b + 0 = b + ( a + c ) = ( b + a ) + c = 0 + c = c. 5) 1a = a 6) (λ + µ ) a = λa + µa 7) (λµ) a = λ(µa ) 8) λ( a + b ) = λa + λb Jeśli wyrazimy wektory w postaci strzałek ( odcinków prostej skierowanej ), to dodawanie wektorów będzie określone prawem równoległoboku. Mnożenie wektora przez dodatnią liczbę odpowiadać będzie rozciągnięciu strzałki bez zmiany jej skierowania. Jeśli λ = 0, to w wyniku mnożenia przez taką liczbę otrzymamy wektor zerowy 0a = 0. Przy λ < 0 skierowanie strzałki zmienia się na przeciwne (−1)a = −a Dalej wyrażenie b + (−a ) będziemy krótko oznaczali jako b − a. Jeśli przyjmiemy możliwość mnożenia przez liczby zespolone, to przy realizacji aksjomatów 1) –8) otrzymamy zespoloną przestrzeń wektorową. Póki nie powiemy inaczej, będziemy mówili o rzeczywistych przestrzeniach wektorowych. Dalej, utworzymy z m wektorów a1, ... , am i m liczb λ1, ... ,λm kombinację liniową :
λ1a1 + ... + λmam
Kombinacja liniowa jest nietrywialna, jeśli nie wszystkie współczynniki λ1, ... ,λm są równe zero.
Wektory a1, ... , am nazywają się liniowo zależnymi, jeśli istnieje taka ich kombinacja liniowa, która jest równa
wektorowi zerowemu :
λ1a1 + ... + λmam = 0
w przeciwnym wypadku wektory te są liniowo niezależne. Inaczej mówiąc, wektory a1, ... , am są liniowo niezależne, jeśli ani jedne z nich nie wyraża się w postaci kombinacji
liniowej pozostałych. Jeśli a i b są liniowo zależne a + λb = 0, to takie wektory nazywają się kolinearne (współliniowe ) Definicja 2. Niech e1, ..., en - będzie liniowo niezależnym zbiorem wektorów ( należącym do jednej przestrzeni V )
Załóżmy, że dowolny wektor a ∈ V może być przedstawiony w postaci kombinacji liniowej tego zbioru wektorów : n
a = a1e1 + ... + anen = Σ aiei (1.35)
i=1 Wtedy e1, ..., en nazywa się bazą V.
Do aksjomatów 1- 8 należy dodać jeszcze jeden. 9) Istnieje baza, zawierająca n wektorów. Takie aksjomaty określają V jako przestrzeń wektorowa. Mówimy, że V posiada wymiar n. Każda baza przestrzeni V zawiera n wektorów, a zbiory n + 1 wektorów w tej przestrzeni są liniowo zależne. Jeśli należy podkreślić, że wymiar przestrzeni wektorowej jest równy n, to piszemy Vn.
Wprowadzenie do klasycznej teorii cząstek i pól – B. Kosjakow Oczywiście podane definicje są równoważne, stosują jedynie inne oznaczenia i akcentują kwestie istotne dla danego działu fizyki – w MQ jest to kwestia przestrzeni wektorowej nad ciałem liczb zespolonych. Należy również zauważyć, że aksjomatyka przestrzeni wektorowej nic nie mówi o iloczynie skalarnym i wektorowym tj. o operacji mnożenia dwóch wektorów. Mówi o ich dodawaniu (odejmowaniu), mnożeniu przez skalary – ale nie o mnożeniu wzajemnym wektorów przez siebie.
11
Przykłady przestrzeni liniowych. Rozważmy kilka przykładów przestrzeni liniowych ( wektorowych ).
a) Zbiór wektorów swobodnych określonych w n -wymiarowej przestrzeni Euklidesa En , wraz ze zwykłymi działaniami dodawania wektorów, mnożenia wektorów przez liczby rzeczywiste, elementem neutralnym dla działania dodawania jest wektor zerowy, a dla mnożenia wektor jednostkowy. b) Niech K będzie dowolnym ciałem, zbiór Q niech będzie zbiorem jednoelementowym Q = {q}. Wprowadzimy w Q działanie liniowe przyjmując : q + q = q oraz α • q = q , α ∈ K. Sprawdzając aksjomaty przestrzeni liniowej możemy się przekonać, że tym sposobem otrzymujemy przestrzeń liniową Q nad ciałem K. Przestrzeń ta zawiera tylko jeden wektor – wektor zerowy. Przestrzenie o takich własnościach nazywamy „przestrzeniami zerowymi”.
c) Niech n będzie ustaloną liczbą naturalną , K niech będzie dowolnym ciałem. Niech Kn będzie zbiorem ciągów postaci ( a1 , ... , an ) ∈ K. Sumę dwóch ciągów a = ( a1 , ... , an ) i b = ( b1 , ... , bn ) określimy jako ciąg c o postaci :
c = a + b = ( a1+ b1 , ... , an + bn ). Iloczyn αa , określimy jako następujący ciąg αa = ( αa1 , ... , αan ).
Element zerowy możemy określić następująco : 0 = ( 0 , ... , 0 ). Zbiór Kn z tak określonymi działaniami oraz z wyróżnionym elementem zerowym jest przestrzenią liniową nad ciałem K. d) Niech K będzie ciałem liczb rzeczywistych , M niech będzie zbiorem wszystkich funkcji rzeczywistych, ciągłych na odcinku (a, b) - ∞ ≤ a < b ≤ +∞. Dodawanie wektorów ( tj. funkcji ) oraz mnożenie przez liczby określamy w zwykły sposób. Zbiór M staje się wówczas przestrzenią liniową nad ciałem K. Przestrzeń ta zawiera m.in. następujące podprzestrzenie liniowe : - zbiór wszystkich wielomianów - zbiór wielomianów trygonometrycznych postaci : a0 + ( a1cos x + b1sin x ) + ... + ( an cos x + bnsin x ) ,
an , bn ∈ R
e) Niech M będzie zbiorem macierzy o m wierszach i n kolumnach zawierających elementy z ciała K ( macierze rzeczywiste lub zespolone ). Dodawanie macierzy oraz mnożenie macierzy przez skalar określamy w zwykły sposób. Wówczas M będzie przestrzenią liniową nad ciałem K. Zerem tej przestrzeni jest macierz zerowa. Jak widać już choćby z tych prostych przykładów przestrzeń liniowa jest pojęciem bardzo szeroko rozpowszechnionym w matematyce i często wykorzystywanym w fizyce. Podprzestrzeń danej przestrzeni liniowej. Definicja. Podprzestrzenią liniową Q’ przestrzeni liniowej Q nazywamy niepusty zbiór wektorów należących do Q, takich że sam tworzy on przestrzeń liniową względem wprowadzonych w Q działań ( np. dodawania i mnożenia przez liczby ) Inaczej mówiąc, zbiór Q’ ⊂ Q tworzy podprzestrzeń liniową przestrzeni liniowej Q, jeżeli z faktu, że x ∈ Q’ i y ∈ Q wynika, że x + y ∈ Q’ , oraz αx ∈ Q’ Z podanej definicji wynika, że przestrzeń Q i jej podprzestrzeń Q’ zbudowane są nad tym samym ciałem K. Działania na wektorach przestrzeni Q’ są identyczne z działaniami prowadzonymi na wektorach w przestrzeni Q. Każda przestrzeń liniowa zawiera trywialną podprzestrzeń złożoną z jednego wektora zerowego. Każda przestrzeń Q zawiera jako podprzestrzeń siebie samą, jest to podprzestrzeń niewłaściwa. Liniowa zależność i niezależność wektorów danej przestrzeni liniowej. Definicja Niech Q będzie daną przestrzenią liniową, nad ciałem K, składającą się z wektorów e1, ... ,en
Wektory e1, ... ,en nazywamy „wektorami liniowo niezależnymi”, jeżeli z równości :
α1 e1 + … + αn en = 0 , αi ∈ K (1.1)
wynika, że α1 = α2 = ... = αn = 0
W przeciwnym razie tj. gdy istnieją skalary αi nie wszystkie równe zeru dla których spełniona jest równość (1.1) wektory
e1 , ... , en nazywamy „wektorami liniowo zależnymi”.
Wniosek. Układ wektorów liniowo niezależnych nie zawiera wektora zerowego.

12
Innymi słowy : Definicja Mówimy, że zbiór wektorów | vi > jest liniowo niezależny, jeśli ani jedna nietrywialna ( tj. taka kombinacja w
której w skrajnym przypadku ani jeden ze współczynników nie jest równy zero ) kombinacja liniowa : λ1 | v1 > + ... + λN | vN > = | zero >
Ćwiczenie Pokazać, że zbiór wektorów { | vi > } nie jest liniowo niezależny wtedy i tylko wtedy, kiedy jeden z
wektorów | vi > może być przedstawiony w postaci kombinacji liniowej innych wektorów.
Ćwiczenie Dla przestrzeni liniowych wektorów geometrycznych pokazać co następuje :
a) W przestrzeni wektorów na płaszczyźnie ( oznaczanej jako R2 ) dowolne dwa wektory są liniowo niezależne w tym i tylko w tym przypadku, jeśli nie są one równoległe.
Dowolny zbiór z trzech wektorów ( w R2 ) jest liniowo zależny.
b) W przestrzeni wektorów w trójwymiarowej przestrzeni ( oznaczanej jako R3 ) dowolne trzy wektory, nie lezące na jednej płaszczyźnie ( nie są komplanarne ), tworzą zbiór liniowo niezależny. Kombinacja liniowa wektorów. Definicja Niech Q będzie przestrzenią liniową nad ciałem. Każdy wektor e ∈ Q o postaci : e = α1 e1 + … + αn en , ei ∈ Q , αi ∈ K (1.2)
nazywamy „kombinacją liniową wektorów qi o współczynnikach αi”.
( mówimy również ,że wektor e możemy zapisać jako kombinacje wektorów ei )
Wzór (1.2) możemy zapisać następująco : n
α1e1 + … + αn en = Σ αi ei = αi ei ( kiedy stosujemy umowę sumacyjną )
i=1 Zbiór wszystkich kombinacji liniowych nazywa się warstwą (powłoką ) liniową danych wektorów. Kombinacja liniowa postaci : 0 e1 + … + 0 en
nazywa się trywialną. Kombinacja trywialna wektorów jest równa wektorowi zerowemu. Definicja Kombinacje liniową (1.2) nazywamy trywialną, jeżeli α1= … = αn = 0.
Jeżeli spośród skalarów αi chociaż jeden jest różny od zera kombinacje liniową nazywamy nietrywialną.
Wnioski : a) Każdy skończony układ wektorów jest albo liniowo zależny albo liniowo niezależny. b) Układ składający się z jednego wektora jest liniowo zależny wtedy i tylko wtedy, gdy wektor ten jest zerowy. c) Jeżeli część układu jest liniowo zależna, to cały układ jest liniowo zależny. d) Jeżeli cały układ jest liniowo niezależny to i każda jego część jest liniowo niezależna. e) Jeżeli układ jest liniowo zależny to istnieje w nim co najmniej jeden wektor, który jest kombinacją liniową pozostałych wektorów tego układu. f) Jeżeli pewien element układu jest kombinacją liniową pozostałych elementów tego układu, to układ ten jest liniowo zależny. Wniosek f) sformułujmy w postaci twierdzenia : Twierdzenie. Wektory e1, … , en (n ≥ 2 ) są liniowo zależne wtedy i tylko wtedy, gdy jeden z nich jest kombinacją
liniową pozostałych. Układ wektorów e1, … , en jest liniowo zależny, jeśli jakakolwiek jego część jest liniowo zależna.
Inaczej mówiąc, jeśli układ wektorów jest liniowo niezależny, to każdy jego podukład jest liniowo niezależny. Niech będzie dana przestrzeń Q, niech wektory e1, … , en ∈ Q będą liniowo zależne tzn. z równości
α1e1 + … + αn en = 0
wynika, że co najmniej jeden ze współczynników α1 jest różny od zera.
Wówczas ( przyjmując , że α1 ≠ 0 ) :

13
α1e1 = − α2e2 − … − αn en ⇒ e1 = − ( α2 / α1) e2 − … − ( αn / α1) en
Oznaczmy : λ1 = − ( α2 / α1) , .... , λn−1 = − ( αn / α1)
Wtedy : e1 = λ1e2 + … + λn−1 en (1.3)
Czyli przedstawiliśmy wektor e1 jako kombinacje liniową wektorów e2 , … , en
Wniosek. Jeśli wektory e1, … , en są liniowo zależne, to w skrajnym przypadku co najmniej jeden z nich możemy
przedstawić jako kombinacje liniową pozostałych wektorów. Przykład. Na płaszczyźnie ( rozpiętej w przestrzeni Euklidesa ) możemy znaleźć dowolną ilość par wektorów liniowo niezależnych – są to wektory nie kolinearne tj. nie leżące na jednej prostej, jednak dowolny zbiór trzech wektorów będzie zbiorem liniowo zależnym. Baza i wymiar przestrzeni liniowej. Definicja Niech Q będzie przestrzenią liniową. Układ wektorów e1, … , en ∈ Q nazywa się „bazą skończoną przestrzeni
Q” lub krótko „bazą” , jeżeli : a) e1, … , en są liniowo niezależne
b) każdy układ zawierający e1, … , en i różny od e1, … , en jest liniowo zależny.
Innymi słowy – układ wektorów przestrzeni Q jest bazą tej przestrzeni, gdy jest to układ maksymalny, wektorów liniowo niezależnych należących do Q. Przestrzeń zerowa nie posiada bazy, gdyż nie zawiera układu wektorów liniowo niezależnych. Twierdzenie ( twierdzenie Steinitza ) Jeżeli wektory e1, … , en ∈ Q tworzą bazę przestrzeni Q, a wektory
p1, … , pk ∈ Q tworzą zbiór wektorów liniowo niezależnych to spełnione są warunki :
a) n ≥ k b) istnieje n – k wektorów spośród wektorów p1, … , pk które łącznie z wektorami e1, … , en tworzą bazę
przestrzeni Q. Wnioski. a) Każda niezerowa przestrzeń liniowa posiada bazę. b) Każdy liniowo niezależny układ wektorów przestrzeni Q można rozszerzyć do bazy. c) Jeżeli wektory e1, … , en ∈ Q tworzą bazę przestrzeni Q, to każda inna baza przestrzeni Q składa się ze zbioru n
wektorów tj. każde dwie różne bazy przestrzeni Q składają się z tej samej liczby wektorów. d) Jeżeli baza przestrzeni Q zawiera n wektorów, to każdy układ należący do Q, który zawiera więcej niż n wektorów jest układem zależnym. e) Jeżeli baza przestrzeni Q zawiera n wektorów, to każdy układ należący do Q, który zawiera mniej niż n wektorów nie może być bazą przestrzeni Q. f) liczba elementów bazy danej przestrzeni Q nie zależy od sposobu jej wyboru. Twierdzenie. Każdy wektor q ∈ Q można przedstawić i to tylko w jeden sposób jako kombinacje liniową wektorów danej bazy Q, tzn. jeżeli wektory e1, … , en ∈ Q stanowią bazę przestrzeni Q to wektor q, nie należący do zbioru
wektorów e1, … , en możemy wyrazić jako kombinację liniową postaci :
q = α1e1 + … + αn en
Liczby αi nazywamy „składowymi (współrzędnymi)” wektora q w bazie e1, … , en ∈ Q.
Definicja Przestrzeń liniową Q nazywamy „przestrzenią skończenie wymiarową”, jeśli ma bazę złożoną ze skończonej liczby wektorów równej n. Liczbę wektorów bazy nazywamy „wymiarem przestrzeni Q” i oznaczamy dim Q.
Jeżeli dim Q = n, to przestrzeń liniową nazywamy „przestrzenia liniową n-wymiarową” i oznaczamy Qn. Przestrzeń liniową Q nazywamy nieskończenie wymiarową jeżeli ma bazę złożoną z nieskończonej liczby wektorów. W tym przypadku przyjmujemy, że wymiar przestrzeni dim Q = ∞. Przestrzeń liniową zerową nazywamy przestrzenią zero wymiarową tj. dim Q = 0. Definicja 2.8 Powłoką (warstwą ) liniową zbioru wektorów qi ∈ Q, nazywamy zbiór wszystkich ich kombinacji
liniowych. Można pokazać, że powłoka liniowa przestrzeni Q jest jednocześnie podprzestrzenią przestrzeni Q.

14
Mówimy również, że podprzestrzeń ta jest rozpięta na wektorach qi, rozpinanie danej przestrzeni na danych wektorach
oznaczamy span (qi ).
Warunkiem, aby zbiór wektorów qi był bazą przestrzeni Q jest oczywiście :
span ( qi ) = Q dla qi ∈ Q i span ( qs ) ≠ Q dla qi ∉ Q
Innymi słowy : Definicja Podzbiór { | vi > } przestrzeni wektorowej V jest dla V zbiorem rozpinającym, jeśli dowolny wektor ∈ V,
można wyrazić jako kombinację liniową wektorów | vi >. Zbiór wszystkich kombinacji liniowych elementów pewnego
zbioru { | vi > } nazywa się napiętym na { | vi > }.
Definicja Bazą V nazywamy dowolny liniowo niezależny zbiór napinający. Rozkładem wektora względem bazy nazywa się jego wyrażenie w postaci kombinacji liniowej elementów bazy. Baza – jest to najmniejszy podzbiór przestrzeni liniowej, taki, że wszystkie pozostałe wektory można wyrazić w postaci kombinacji liniowej elementów bazy. Pojęcie „baza” może sprawiać mylne wrażenie, że w przestrzeni liniowej istnieje tylko jedna baza – podobnie do tego faktu, ze budynek może posiadać tylko jeden fundament. Jednakże, jak przekonamy się dalej, w dowolnej nietrywialnej przestrzeni liniowej istnieje nieskończenie wiele różnych baz. Definicja Liczba elementów w bazie nazywa się wymiarem V. wymiar oznacza się jako dim V. Ćwiczenie Dowieść, że w przestrzeni o skończonym wymiarze wszystkie bazy posiadają jednakową liczbę elementów. Ćwiczenie Dla rozłożenia wektora | a > względem bazy { | vi > }, tj. dla :
| a > = Σ ai | vi > (A.1)
i można wykorzystać oznaczenie : | a > ≅ ( a1 ) (A.2)
( a2 )
( … ) ( aN )
Zapis ten nazywa się zapisem wektora a w postaci macierzowej – w odróżnieniu od formy zapisu Diraca (A.1). Skalary ai nazywają się współczynnikami lub amplitudami rozkładu.
( wykorzystujemy symbol ≅ w miejsce =, wtedy kiedy wyrażamy wektory i operatory w formie macierzowej. Robimy to po to, aby podkreślić różnicę : lewa cześć (wektor ) reprezentuje sobą obiekt abstrakcyjny i nie zależy od wyboru bazy, część prawa – jest to zbiór liczb, zależnych od wyboru bazy { | vi > }.
Jednakże w literaturze, zazwyczaj dla uproszczenia wykorzystuje się znak = ) ( mówimy również, ze wektora, jako obiekt algebraiczny jest reprezentowany przez macierz liczbową kolumnową ) Rozkład wektora w bazie - przykłady. a) Przestrzeń wektorów geometrycznych. Przestrzeń rozpatrywana standardowo w kursie geometrii analitycznej jest przestrzenią Euklidesową trójwymiarową – możemy w niej wyróżnić bazę złożoną z trzech niezależnych wektorów ( zazwyczaj unormowanych do jedności trzech wektorów niekomplanarnych tj. nie leżących na jednej płaszczyźnie. Wektory te nazywamy wersorami ). Dowolne cztery wektory są już wektorami liniowo zależnymi. Bazę taką standardowo oznacza się jako i, j , k.
b) Niech Qn będzie przestrzenią liniową, złożoną z ciągów n-wyrazowych. Wykażemy, że zbiór wektorów : { q1, … , qn } takich, że :
q1 = ( 1, 0, 0, … , 0 )
q2 = ( 0, 1, 0, … , 0 )
q3 = ( 0, 0, 1, … , 0 )
..... qn = ( 0, 0, 0, … , 1 )

15
jest bazą przestrzeni Qn. ( jest to tzw. baza standardowa ) W pierwszej kolejności sprawdzamy czy zadane wektory są liniowo niezależne. W tym celu rozpatrzymy równanie : α1q1 + … + αn qn = 0
Równoważne równanie macierzowe ma postać : [ α1 ] [ 1 0 0 … 0 ] [ 0 ]
[ α2 ] [ 0 1 0 … 0 ] = [ 0 ]
……………………. [ αn ] [ 0 0 0 … 1 ] [ 0 ]
Z równania tego otrzymujemy : α1 = … = αn = 0
Zatem zadany zbiór wektorów jest liniowo niezależny, może zatem stanowić bazę przestrzeni Qn. Zadanie. Czy wektor x jest kombinacją liniową wektorów xi, gdzie :
Rozwiązanie.

16
Algebra liniowa w zadaniach W. Dubnicki, L. Filus, H. Sosnowska PWN 1985, str. 29 Zadanie 2.8 Przekrój i suma podprzestrzeni. Suma prosta przestrzeni liniowych. Definicja Niech Q1 i Q2 będą dwiema podprzestrzeniami przestrzeni Q. Przekrojem przestrzeni Q1 i Q2 nazywamy
zbiór wektorów należących równocześnie do przestrzeni Q1 i Q2 , przekrój ten oznaczamy Q1 ∩ Q2
Przekrój dwóch podprzestrzeni nigdy nie jest zbiorem pustym, bowiem zawsze zawiera co najmniej element zerowy. Definicja Sumą przestrzeni Q1 i Q2 nazywamy zbiór wektorów postaci : q1 + q2 , gdzie q1∈ Q1, q2 ∈ Q2.
Pojęcia przekroju i sumy możemy rozszerzyć na dowolną ilość składników ( przestrzeni liniowych ) Definicja Niech Q1 i Q2 będą dwiema podprzestrzeniami przestrzeni Q. Jeżeli każdy wektor q ∈ Q można przedstawić
( i to tylko w jeden sposób ) jako sumę dwóch wektorów : q = q1 + q2 , gdzie q1∈ Q1, q2 ∈ Q2, to mówimy, że
przestrzeń Q rozkłada się na sumę prostą podprzestrzeni Q1 i Q2.
Fakt ten zapisujemy : Q = Q1 ⊕ Q2
Twierdzenie. Na to, aby przestrzeń Q rozkładała się na sumę prostą podprzestrzeni Q1 i Q2 wystarcza aby :
a) podprzestrzenie Q1 i Q2 miały tylko jeden wspólny wektor zerowy tj. Q1 ∩ Q2 = ∅
b) Suma wymiarów tych podprzestrzeni była równa wymiarowi przestrzeni Q tj. dim Q1 + dim Q2 = dim Q
Twierdzenie 11.2 Zachodzi następująca równość : dim Q1 + dim Q2 = dim ( Q1 + Q2 ) + dim ( Q1 ∩ Q2 )
W przypadku kiedy : Q1 ∩ Q2 = ∅ to dim Q1 + dim Q2 = dim ( Q1 + Q2 )
Czyli dim ( Q1 ⊕ Q2 ) = dim Q1 + dim Q2
Twierdzenie. Jeżeli Q = Q1 ⊕ Q2 , wektory q1, … , qk tworzą bazę przestrzeni Q1 a wektory p1, … , ps tworzą bazę
przestrzeni Q2 , to przestrzeń Q ma bazę : { q1, … , qk , p1, … , ps }

17
Przekształcenie współrzędnych przy zmianie bazy. W wielu przypadkach zachodzi konieczność zmiany danej bazy przestrzeni liniowej na inną bazę tej samej przestrzeni. Wyprowadzimy teraz wzory według których przekształcają się współrzędne dowolnego wektora przy przejściu do nowej bazy. Niech Q będzie n-wymairową przestrzenią liniową, e1, … , en – baza w przestrzeni Q.
Niech e’1, … , e‘n – będzie nową bazą przestrzeni Q. Wektory e’1, … , e‘n możemy przedstawić rozkładając je w bazie
pierwotnej : e’1 = a11 e1 + a12 e2 + … + a1n en (1.5)
e’2 = a12 e1 + a22 e2 + … + a2n en
.......................................................... e’n = a1n e1 + a1n e2 + … + ann en
Współczynniki rozkładu tworzą macierz kwadratową n × n A = [ aik ] ; i, k = 1, .... , n ,
Oczywiście warunkiem niezależności wektorów e’1, … , e‘n jest, aby det A ≠ 0.
Macierz A nazywamy macierzą przejścia z bazy e1, … , en do bazy e’1, … , e‘n .
Niech q będzie dowolnym wektorem należącym do przestrzeni Q. Rozkład wektora q, odpowiednio w bazie pierwotnej i nowej jest następujący : q = ε1 e1 + ε2 e2 + … + εn en = ε’1 e’1 + ε’2 e’2 + … + ε’n e’1 (1.6)
( ε1, .... εn ) – współrzędne wektora q w bazie ( e1, … , en )
( ε’1, ..., ε’n ) – współrzędne wektora q w bazie ( e’1, … , e‘n )
Podstawiając do (1.6) zależności (1.5) otrzymamy : q = ε1 e1 + ε2 e2 + … + εn en = ε’1 ( a11 e1 + a12 e2 + … + a1n en ) + ε’2 ( a12 e1 + a22 e2 + … + a2n en ) + ...
... + ε’n ( a1n e1 + a1n e2 + … + ann ) (1.7)
Ponieważ wektory e1, … , en są liniowo niezależne, współczynniki stojące po prawej i lewej stronie (1.7) muszą być
jednakowe. Zatem : ε1 = a11ε’1 + a12 ε’2 + … + a1n ε’n (1.8)
ε2 = a21ε’1 + a22 ε’2 + … + a2n ε’n
........................................................... ε1 = an1ε’1 + an2 ε’2 + … + ann ε’n
Układ równań (1.8) przedstawia zależność między współrzędnymi wektora q w bazie pierwotnej i bazie nowej. Współczynniki tej zależności aik tworzą macierz odwrotną do macierzy A.
Ponieważ przekształcenia dokonywane przy zmianie bazy (baz ) są bardzo ważne podsumujmy to co zostało zapisane powyżej. Niech { ei } i { e‘ j } będą bazami n-wymiarowej przestrzeni liniowej Q. Wektory { e‘ j } możemy przedstawić w sposób
jednoznaczny w postaci kombinacji liniowej wektorów bazy { ei }
n
e‘ j = Σ αij ei , j = 1, ..., n i=1 Współczynniki ( skalary ) αij nazywamy „współczynnikami rozkładu” bazy { e‘ j } w bazie { ei }.
Współczynniki takie tworzą macierz n × n ( macierz przejścia od bazy { e‘ j } do bazy { ei } )
A = [ αij ]i, j = 1, …, n .
Jest to macierz nieosobliwa tj. det A ≠ 0.
Współrzędne wektora w nowej bazie wyrażają się poprzez stare współrzędne za pomocą macierzy A−1

18
Innymi słowy :
( ε’1, ..., ε’n ) = A−1 ( ε1, ..., εn ) Podczas, gdy : ( e’1, ..., e’n ) = A ( e1, ..., en ) Przykład. Niech w przestrzeni liniowej ciągów 3 wyrazowych będą zadane dwie bazy : { ei } , { e‘ j } i, j= 1, 2, 3
e1= [ 1, 2, 0 ] , e2 = [ 3, 4, 2 ], e3 = [ 2, 2, 1 ]
e‘1 = [ 1, −1, 2 ] , e‘2 = [ 3, 1, 1 ] , e‘3 = [ 4, 0, 2 ]
Należy znaleźć macierze przejścia między tymi bazami. Z definicji otrzymujemy : 3 { e‘1 = α11 e1 + α12 e2 + α13 e3
e‘ j = Σ αij ei , j = 1, 2, 3 ⇒ { e‘2 = α21 e1 + α22 e2 + α23 e3 i=1 { e‘3 = α31 e1 + α32 e2 + α33 e3
[ 1, −1, 2 ] = α11[ 1, 2, 0 ] + α12[ 3, 4, 2 ] + α13 [ 2, 2, 1 ]
[ 3, 1, 1 ] = α21[ 1, 2, 0 ] + α22 [ 3, 4, 2 ] + α23 [ 2, 2, 1 ]
[ 4, 0, 2 ] = α31[ 1, 2, 0 ] + α32 [ 3, 4, 2 ] + α33 [ 2, 2, 1 ]
Otrzymujemy zatem dziewięć równań o postaci : 1 = α111 + α12 3 + α13 2 ; 3 = α211 + α22 3 + α23 2 ; 4 = α311 + α32 3 + α33 2
−1 = α112 + α12 4 + α13 2 1 = α212 + α22 4 + α23 2 0 = α312 + α32 4 + α33 2
2 = α110 + α12 2 + α13 1 1 = α210 + α22 2 + α23 1 2 = α310 + α32 2 + α33 1
Rozwiązując te równania otrzymamy : A = [ −5/2 , 3/2 , −2 ] [ ½ , −7/2 , −2 ] [ 1 , 6 , 6 ]
A−1 = [ −9/2 , −21/2 , −5 ] [ −5/2 , −13/4 , −3 ] [ 13/4 , 33/4 , 4 ] ______________________________________________________________________________ Niech e1, ... ,en i e’1, ..., e‘n – będą dowolnymi bazami. Każdy wektor drugiej bazy może być rozłożony względem
wektorów pierwszej bazy :
e’ i = Lji ej (1.37)
Ten rozkład można przedstawić w postaci macierzowej :
gdzie pierwszy indeks elementu macierzowego Lj
i numeruje wiersze, a drugi – kolumny.
Jakie są ograniczenia na macierz || Lji || ?
Ponieważ n liniowo niezależnych e1, ... ,en przekształca się w n liniowo niezależnych wektorów e’1, ..., e‘n ,to z liczb
Lji powinna być utworzona macierz rzeczywista n × n o niezerowym wyznaczniku :
det L ≠ 0 (1.39) Z drugiej strony, każda baza wektorowa e1, ... ,en może być rozłożona względem wektorów bazy e’1, ..., e‘n :
ei = Mji e’ j (1.40)

19
Kombinując (1.37) i 91.40), otrzymujemy :
ei = Mji L
kj ek (1.41)
i
e’ i = Lji M
kj e’k (1.42)
Aby równania (1.41) i (1.42) były tożsamościami, koniecznym jest spełnienie warunków :
Mji L
kj = Lj
i Mkj = δk
j (1.43)
gdzie δkj – symbol Kroneckera :
δkj = { 0 jeśli k ≠ i
{ 1 jeśli k = i W oznaczeniach macierzowych : ML = LM = 1 (1.44) gdzie 1 – macierz jednostkowa n × n, na której diagonali stoi 1, a niediagonalne elementy są równe 0. Z (1.44) wynika, że M – jest macierzą, odwrotną do macierzy L :
M = L−1 (1.45) Stąd staje się jasnym warunek (1.39) : z algebry liniowej wiadomo, że warunek ten jest konieczny i wystarczający istnienia macierzy odwrotnej do L. Rozpatrujemy zamianę jednej bazy na drugą, a to na mocy dowolności baz i możliwość zamiany roli baza primowanych i nieprimowanych, oznacza że przekształcenie (1.37) powinno być odwracalne. Niech e1, ... ,en i e’1, ..., e‘n – będą dowolnymi bazami. Wtedy dowolny wektor a można zapisać w postaci :
a = ai ei (1.46)
lub w bazie primowanej :
a = a’i e’ i (1.47)
Podstawiając (1.40) do (1.46) znajdujemy :
a = aj Mij e‘ i (1.48)
co przy przyrównaniu do (1.47) daje :
a‘i = Mij a
j (1.49)
Widzimy, że nowe współrzędne a‘i są otrzymywane ze starych współrzędnych ai poprzez działanie macierzy transponowanej odwrotnej do macierzy L. Wprowadzenie do klasycznej teorii cząstek i pól – B. Kosjakow ______________________________________________________________________________ Współrzędne wektorów przekształcają się za pomocą macierzy A transponowanej AT.
______________________________________________________________________________ 4. Przekształcenie współrzędnych przy przekształceniu bazy w n- wymiarowej przestrzeni liniowej. 1. Proste i odwrotne przekształcenie baz. Niech e1, ... ,en i e’1, ... , e‘n – będą dowolnymi bazami n – wymiarowej przestrzeni liniowej R.
Tak jak każdy element przestrzeni R, każdy element e’1, ... , e‘n może być rozłożony względem bazy e1, ... ,en
Załóżmy, że elementy e’1, ... , e‘n wyrażają się poprzez elementy e1, ... , en z pomocą wzorów :

20
To oznacza, że przejście od pierwszej bazy e1, ... , en do drugiej bazy e’1, ... , e‘n zadane jest przez macierz :
Należy podkreślić, że wyznacznik ∆ macierzy (2.26) jest różny od zera, ponieważ w wypadku przeciwnym wiersze tej macierzy (zatem i elementy bazowe e’1, ... ,e‘n ) okazałyby się być liniowo zależne.
Dalej pokażemy, że przejście odwrotne od drugiej (primowanej ) bazy do bazy pierwszej (nieprimowanej ) jest realizowane za pomocą macierzy B – odwrotnej do macierzy A. Macierz B, odwrotna do macierzy A ma postać :
gdzie symbolem ∆ oznaczono wyznacznik macierzy A, a poprzez Aij – dopełnienie algebraiczne elementu aik tego
wyznacznika. Pomnożymy równania (2.25) odpowiednio przez dopełnienia algebraiczne A1j, A2j, ... , Anj elementów j-tej kolumny
wyznacznika ∆ i po tym dodamy te równania. W wyniku tego otrzymamy ( dla dowolnego numeru j, równego 1, 2, ... , n ) :
Uwzględniając, że suma iloczynów elementów i-tej kolumny przez odpowiednie dopełnienia algebraiczne elementów j- tej kolumny jest równa zero przy i ≠ j i równa wyznacznikowi ∆ przy i = j, otrzymamy z ostatniej równości, że :
skąd :
lub dokładniej :
Wzory (2.28) ustanawiają właśnie, że przejście odwrotne od bazy e’1, ... , e‘n do bazy e1, ... , en są realizowane z
pomocą macierzy (2.27), odwrotnej do macierzy A.
Taką macierz oznacza się jako A−1.

21
2. Związek między przekształceniem baz i przekształceniem odpowiednich współrzędnych. Niech jak wcześniej, baza e1, ... ,en będzie przekształcała się w bazę e’1, ... ,e‘n z pomocą niezdegenerowanej macierzy
(2.26), tak że przekształcenie odwrotne baz zadane jest macierz (2.27). Dalej, niech x – będzie dowolnym elementem rozpatrywanej przestrzeni R ( x1, ... , xn ) – jego współrzędne względem pierwszej bazy e1, ... ,en;
( x’1, ... , x’n ) – jego współrzędne względem drugiej bazy e’1, ... ,e‘n.
Tak więc :
Podstawiając do tego równania w miejsce elementów e1, ... ,en ich wyrażenia, określone przez wzory (2.28),
otrzymamy :
Z ostatniej równości ( na mocy jednoznaczności rozkładu względem bazy e’1, ... ,e‘n ) od razu wynikają wzory przejścia
od współrzędnych ( x1, ... , xn ) do współrzędnych ( x’1, ... , x’n ) :
Wzory (2.29) pokazują, że przejście od współrzędnych ( x1, ... , xn ) do współrzędnych ( x’1, ... , x’n ) jest realizowane z
pomocą macierzy :
transponowanej do macierzy odwrotnej (2.27) Dochodzimy zatem do następującego wniosku : jeśli przejście od pierwszej bazy do drugiej bazy jest realizowane z pomocą niezdegenerowanej macierzy A, to przejście od współrzędnych dowolnego elementu względem pierwszej bazy
do współrzędnych tego elementu względem drugiej bazy, jest realizowane z pomocą macierzy ( A−1 )T –
transponowanej macierzy A−1. Algebra liniowa - W. A. Ilin, E. G. Poznjak ; Fizmatlit 2005 ______________________________________________________________________________

22
Orientacja przestrzeni liniowej. Definicja Niech Q będzie przestrzenią liniową. Mówimy, że bazy { ei } , { e‘ j } wprowadzone w przestrzeni Q,
wyznaczają zgodne orientacje przestrzeni Q, jeśli wyznacznik macierzy A przejścia od bazy { e‘ j } do bazy { ei } jest
dodatni det A > 0
Przestrzeń n-wymiarowa Qn ,wraz ze zbiorem baz o zgodnych orientacjach nazywamy przestrzenią liniową
zorientowaną i oznaczamy ją np. tak : Qn+ IV. Odwzorowania liniowe, formy liniowe, funkcje liniowe. Definicja Niech Q i Q’ będą dwiema przestrzeniami n- wymiarowymi nad ciałem K. Odwzorowanie : f : Q → Q’ nazywamy „odwzorowaniem liniowym” ( przekształceniem liniowym ), jeżeli spełnia następujące warunki : a) ∀ f(a + b) = f(a) + f(b) a, b∈Q b) ∀ ∀ f(αa) = αf(a) α∈K a∈Q Jeżeli odwzorowanie f jest wzajemnie jednoznaczne to nazywamy je izomorficznym (izomorfizmem ). Jeżeli odwzorowanie liniowe f ma postać f : Q → K to nazywamy je „formą liniową”. Tak więc forma liniowa, jest to takie odwzorowanie liniowe, które każdemu wektorowi q ∈ Q przyporządkowuje liczbę rzeczywistą lub zespoloną. Jeżeli odwzorowanie liniowe f ma postać f : K → K to nazywamy go funkcją. W ogólności każdemu przekształceniu f odpowiada pewna macierz. Innymi słowy ogólnie mówiąc, odwzorowanie przyporządkowuje wektorowi pewien inny wektor (lub skalar ). Definicja. 1-forma na przestrzeni Q – jest to liniowa funkcja na Q tj. takie odwzorowanie ω : Q → K lub R, dla którego spełnione są warunki : ∀ X, Y ∈ V ω(X + Y) = ω(X) + ω(Y) (addytywność )
∀ X ∈ V i ∀ λ∈Rn ω(λ • X ) = λ • ω(X) (jednorodność ) Pojęcia synonimiczne 1-formy, to : forma liniowa, kowektor – wektor kowariantny. Zbiór wszystkich możliwych 1-form na przestrzeni Q przyjęto oznaczać Q*. Zbiór ten sam jest rzeczywistą przestrzenią liniową względem naturalnych (standardowych) działań dodawania 1-form i mnożenia ich przez liczby : def ∀ ω, ν ∈ V* (ω + ν) (X) = ω(X) + ν (X) + ω(Y) def
∀ ω ∈ V* i ∀ λ∈Rn (λ • ω) (X) = λ • ω (X) , X ∈V Zatem :
Jeżeli rozpatrzmy w przestrzeni Qn wszystkie możliwe formy liniowe tj. liniowe funkcje skalarne o argumencie wektorowym, to :
Twierdzenie. Zbiór Q*n wszystkich form liniowych określonych na przestrzeni Qn sam tworzy przestrzeń liniową. Operacjami w tej przestrzeni są : dodawanie form liniowych i mnożenie form liniowych przez skalary.
Definicja. Przestrzeń liniową Q*n nazywamy „przestrzenią sprzężoną Q* do danej przestrzeni Q” ( mówimy również – przestrzeń dualna Q* do przestrzeni Q )
( przestrzeń Q*n jest oczywiście zbudowana nad tym samym ciałem co przestrzeń Q oraz dim Q*n = dim Q ) Jeżeli rozpatrujemy jednocześnie przestrzenie Q i Q*, to elementy przestrzeni Q* nazywamy „wektorami kowariantnymi” ( kowektory ), a elementy przestrzeni Q nazywamy „wektorami kontrawariantnymi”.
23
Przykład. Niech wektory e1, e2, e3 stanowią bazę trójwymiarowej przestrzeni Q.
Jak wiemy dowolny wektor q możemy wyrazić w postaci kombinacji liniowej : q = ε1 e1 + ε2 e2 + ε3 e3
Utwórzmy następującą formę liniową : f(q) = f (ε1 e1 + ε2 e2 + ε3 e3 ) = ε1f( e1) + ε2 f( e2) + ε3 f( e3) ( na mocy warunków a), b) )
Oznaczmy : f(e1) = α1 , f(e2) = α2 , f(e3) = α3 ( współczynniki αi są stałe i zależne od wyboru bazy )
Zatem : f(q) = ε1α1 + ε2α2 + ε3α3
Przy przejściu do innej bazy współczynniki formy liniowej αi przekształcają się tak samo jak wektory bazy.
Ogólnie wektory ko- i kontrawariantne są przypadkami szczególnymi obiektu zwanego tensorem. Warto również podkreślić, że w omawianej sytuacji powinniśmy rozróżniać indeksy górne i dolne. Indeksy górne zazwyczaj odnoszą się do składowych wektorów kontrawariantnych, a indeksy dolne do składowych kowariantnych. A jeśli już możemy rozróżniać oba rodzaje indeksów możemy pokusić się o wprowadzenie umowy o sumowaniu Einsteina. Twierdzenie Niech { ei } będzie bazą w przestrzeni Q ; ( e1, ... , en ) niech będą formami liniowymi dla których
ei ( ej ) = δij = { 1 dla i = j - symbol Kroneckera
{ 0 dla i ≠ j
to ( e1, ... , en ) jest bazą w Q*. Bazę tak określoną nazywamy „bazą dualną do bazy { ei }” lub krótko kobazą.
Definicja. Jeśli { ei }
n i =1 jest pewną bazą przestrzeni Q, to bazę { ei } n
i =1 przestrzeni Q* , zbudowaną za pomocą
zależności :
∀ X ∈ V X = X1 e1+ ... + Xn en ; ej(X) = Xj
nazywamy „bazą sprzężoną” (lub dualną , wzajemną) względem wejściowej bazy
{ ei }n
i =1
Można zapytać czy możliwe jest utworzenie przestrzeni dualnej do przestrzeni Q* tj. Q** , naturalnie że tak. Jednakże można dowieść, że przestrzenie Q i Q** są tożsame. Własności transformacyjne wektorów i kowektorów Niech { ei }
n i =1 i { e’j }
n j =1 będą pewnymi bazami przestrzeni Q.
Oznaczmy przez :
A = (Ai j )n
i, j = 1 , e’j Ai j ei
j = 1… n
macierz przejścia od pierwszej bazy do drugiej (primowanej).
Niech : {ej } n j =1 i { e’ j } n
j =1 – będą bazami odpowiednio sprzężonymi.
Łatwo udowodnić, że :
e’ i = (A−1 )i j ej i = 1 ... n
Współrzędne jednego i tego samego wektora X = Xi ei = X’j e’j przestrzeni Q w bazach :
{ ei } n
i =1 i { e’j }n
j=1 związane są między sobą zależnościami :
X’ j = (A-1)j i Xi j = 1 ... n (1.7)
lub w zapisie macierzowym :
X’ = (A−1) • X
gdzie : X’ = ( X’1 , ... X’n )T , X = (X1, ... ,Xn )T

24
Współrzędne jednej i tej samej 1-formy ω = ωi ei = ω’ j e’j w bazach {ei } n
i =1 i {e’ j } n j =1
związane są miedzy sobą równością :
ω’ j = (A)i j ωi j = 1 ... n (1.8)
lub w zapisie macierzowym : (ω’1, ... , ω’n ) = (ω1, ... , ωn ) • A
Dokonajmy podsumowania. Właściwie podaliśmy już najprostszy przykład (szczególny) tensorów : tensorów 1 raz kowariantnych tj. kowektorów i tensorów 1 raz kontrawariantnych tj. wektorów.
Zgodnie z definicją składowe tensora jednokrotnie kontrawariantnego (wektora) X w bazie{ ei }n
i =1
przestrzeni Q są to po prostu jego współrzędne ( X1, ... Xn ) , w tej bazie : X = Xi ei .
Zgodnie z definicją składowe tensora jednokrotnie kowariantnego (kowektora) ω w bazie { ei }n
i =1- są to współrzędne
( ω1, ... ωn ) rozkładu ω względem bazy { ei } n i =1 sprzężonej do bazy { ei }
n i =1: ω = ωi e
i
„Kowariantny” tłumaczymy dosłownie jako „współzmienniczy” a „kontrawariantny” – jako „przeciwzmienniczy”. ( Zobacz uwagi w „Tadeusz Trajdos –Wróbel „Matematyka dla inżynierów” WNT 1966 str. 286 ). Widzimy zatem, że przy zmianie bazy przestrzeni Q :
A = ( Ai j )n
i, j = 1 , e’j Ai j ei
j = 1… n
- składowe tensora 1 raz kowariantnego przekształcają się „tak samo” jak wektory bazy tj. jeżeli do wzorów :
ω’ j = (A)i j ωi j = 1 ... n
podstawimy e’j – w miejsce ω’ j oraz ei w miejsce ωi –to otrzymamy wzory (1.5)
- składowe tensora 1 raz kontrawariantnego przekształcają się „za pomocą” macierzy odwrotnej do macierzy która „uczestniczy” w przekształceniu bazy : słuszne są wzory
A = ( Ai j )n
i, j = 1 , e’j Ai j ei
j = 1… n
X’ j = (A−1)j i Xi j = 1 ... n
Formy dwuliniowe (biliniowa ), formy kwadratowe. Definicja Mówimy, że f(q, p) jest formą dwuliniową wektorów q, p ∈ Q jeżeli : a) f(q, p ) jest przy ustalonym p formą liniową wektora q b) f(q, p ) jest przy ustalonym q formą liniową wektora p Inaczej mówiąc, na mocy definicji formy liniowej warunki a), b) oznaczają odpowiednio : a1) f(q1+ q2, p ) = f(q1, p ) + f(q2, p )
f(αq, p ) = α f(q, p ) a2) f(q, p1+ p2 ) = f(q, p1) + f(q, p2)
f(q, αp ) = α f(q, p ) Forma biliniowa jest odwzorowaniem które przyporządkowuje skalar dwóm wektorom, jest ono przy tym liniowe względem każdego z tych wektorów. Inaczej mówiąc formą biliniowa na Q, nazywamy każde odwzorowanie g : Q × Q → R spełniające warunki a), b). Przykład. Niech będzie dana przestrzeń Q elementami której są ciągi n liczb. Przyjmijmy : f( q , p ) = a11 q1 p1 + a12 q1 p2 + … + a1n q1 pn + (1.10)
+ a21 q2 p1 + a22 q2 p2 + … + a2n q2 pn +
..................................................................... + an1 qn p1 + an2 qn p2 + … + ann qn pn
gdzie q = (q1, ... , qn ) , p = ( p1, ... , pn ) – współrzędne wektorów q, p w pewnej bazie { ei } przestrzeni Q.
25
Wzór (1.10) określa pewną formę dwuliniową, możemy ją zapisać również w zwartej postaci : n
f(q, p ) = Σ aij qi pj
i, k =1 Współczynniki aij nazywamy współczynnikami danej formy f w bazie {ei } ( zależą one od wyboru bazy ).
Współczynniki te obliczamy ze wzoru : aij = f(ei , ej ) Można pokazać, ze zbiór wszystkich form dwuliniowych określonych na pewnej przestrzeni Q sam tworzy przestrzeń liniową. Definicja Formę dwuliniową nazywamy symetryczną, jeżeli : ∀ f(a, b) = f(b, a ) a, b∈Q W przypadku formy symetrycznej macierz jej współczynników jest macierzą symetryczną. Definicja Formę dwuliniową nazywamy antysymetryczną, jeżeli : ∀ f(a, b) = − f(b, a ) a, b∈Q W przypadku formy antysymetrycznej macierz jej współczynników jest macierzą antysymetryczną. Definicja Niech f(a , b) będzie symetryczną formą dwuliniową. Formę f(a, a) nazywamy „formą kwadratową” Definicja Formę kwadratową f(a, a) nazywamy “dodatnio określoną”, jeżeli dla każdego wektora q ≠ 0, q ∈ Q f(q, q ) > 0 Definicja. Mówimy, że forma kwadratowa f(q, q) ma w bazie {ei } danej przestrzeni Q, postać diagonalną ( lub
kanoniczną ), jeśli dla każdego wektora q wartość tej formy wyraża się wzorem : n
f(q, q ) = Σ aii qi2
i=1 Bazę {ei } w takim przypadku nazywamy bazą kanoniczną dla wektora q.
Definicja. Mówimy, że forma biliniowa f(q, p) ma w bazie {ei } danej przestrzeni Q, postać diagonalną
( lub kanoniczną ), jeśli dla każdej pary wektorów q, p wartość tej formy wyraża się wzorem : n
f(q, p ) = Σ aii qi pi
i=1 Twierdzenie. Dla każdej symetrycznej formy biliniowej f(q, p) na przestrzeni Q istnieje baza kanoniczna. Możliwość wyboru bazy w której dana forma kwadratowa ma najprostszą ( kanoniczną ) postać ma ważne znaczenie w fizyce np. w celu ustalenia najprostszej postaci formy metrycznej w przestrzeni Euklidesa ( dla mechaniki klasycznej ) lub w przestrzeni Minkowskiego ( STW ).
26
V. Struktury algebraiczne. Algebra uniwersalna. Algebra liniowa. Jak już wspomniano przestrzeń liniowa stanowi przykład jednej z ogólnych struktur algebraicznych. Algebra liniowa nad zadaną przestrzenią liniową (wektorową ) V (Q, lub jakoś inaczej ), stanowi kolejny krok w „wzbogacaniu” struktury matematycznej – przechodzenia od struktur prostych do bardziej skomplikowanych – bardziej złożonych. Struktura algebraiczna. Zbiór Z posiada strukturę algebraiczną, jeżeli jest w nim zadana pewna liczba działań ( wewnętrznych lub zewnętrznych ) np. dodawanie, mnożenie. Działania te są określone przez odpowiednie definicje. Ogólnie strukturą algebraiczną określoną na niepustym zbiorze Z nazywamy układ (zespół ) : ( Z, F1, ... ,Fm , g1, ... , gm , h1, ... , hn )
złożony ze: i) zbioru Z ii) zbiorów F1, ... ,Fm
iii) działań wewnętrznych gk : A × A → A , n = 1, ... , m
iv) działań zewnętrznych hi : Fi × A → A , i = 1, ... , n
przy czym : i) każde z działań wewnętrznych spełnia określone warunki (aksjomaty ), np. przemienność, łączność, istnienie elementu neutralnego ii) pomiędzy działaniami wewnętrznymi mogą zachodzić związki, jak np. prawo rozdzielności jednego względem drugiego. iii) na zbiorach F1, ... ,Fm mogą być określone dalsze struktury algebraiczne tzn. w każdym ze zbiorów Fi mogą być
określona działania wewnętrzne (lub nawet zewnętrzne ), powiązane ze sobą oraz z działaniami wewnętrznymi i zewnętrznymi określonymi w zbiorze A. iv) pomiędzy działaniami zewnętrznymi i wewnętrznymi w zbiorze z a mogą zachodzić dalsze relacje. Tak określona struktura algebraiczna może być konstrukcją bardzo skomplikowaną, jednakże zazwyczaj definiujemy konstrukcje najprostsze, a bardziej złożone otrzymujemy poprzez określone kombinacje (złożenia ) takich struktur najprostszych. Wprowadzenie różnych działań n- argumentowych w danym zbiorze A daje nieograniczone możliwości dla wyobraźni matematyka. Jednakże badanie dowolnych struktur algebraicznych jest zadaniem zbyt ogólnym, by mogło stanowić wartość z punktu widzenia matematyki. Naturalnym jest wiec nakładanie określonych ograniczeń na postać całej struktury algebraicznej. Algebra stawia sobie za cel szczegółowe badanie konkretnych struktur algebraicznych. Wybór konkretnej struktury podyktowany jest potrzebami i wewnętrzną logiką samej algebry. Działanie algebraiczne. Działaniem lub operacją algebraiczną określoną na niepustym zbiorze Z nazywamy funkcję f, która każdej uporządkowanej parze (a, b) ∈ Z × Z przyporządkowuje dokładnie jeden element c ∈ Z , nazywany „wynikiem” tego działania Tak określone działanie nazywamy działaniem dwu argumentowym lub binarnym ( W dalszej kolejności możemy oczywiście zdefiniować działania n-elementowe. Działanie binarne jest jednak działaniem najczęściej wykorzystywanym w algebrze. Działanie dwu elementowe możemy zapisać następująco : a f b = c lub używając pewnego symbolu zastępującego funkcję f : a ⊗ b = c lub a ∧ b = c lub a + b = c lub a ↵ b = c itp. ( konkretny rodzaj użytego symbolu zależy od konkretnie przyjętej definicji własności funkcji f ) Działanie nazywamy zamkniętym w zbiorze Z (wewnętrznym ), jeżeli dla każdej pary ( a, b) ∈ Z × Z , c ∈ Z tzn. wynik działania c również należy do zbioru Z. Jeżeli wynik c ∉ Z to działanie nazywane jest „ działaniem zewnętrznym”. Przykład. Działanie dzielenia w zbiorze liczb całkowitych C / {0} jest działaniem zewnętrznym, ponieważ dla dowolnych elementów a, b ∈ c /{0} wynik c = a /b może nie należeć do zbioru C /{0}. Niepusty zbiór X, w którym określono jedno działanie zewnętrzne nazywamy, „grupoidem”.
27
Definicja Działanie f określone w niepustym zbiorze X nazywamy działaniem przemiennym (komutatywnym), jeżeli dla dowolnych a, b ∈ X zachodzi : afb = bfa np. a + b = b + a Definicja Działanie f określone w niepustym zbiorze X nazywamy działaniem łącznym (asocjatywnym), jeżeli dla dowolnych a, b ∈ X zachodzi : ( afb )fd = af( bfd ) np. ( a + b ) + d = a + ( b + d ) Definicja Niech G będzie niepustym zbiorem a „•” będzie działaniem wewnętrznym. Parę ( G, • ) nazywamy grupą, jeżeli działanie • jest : a) łączne b) ma element neutralny e tj. e • a = a • e = a ; a, e ∈ G c) każdy element a ∈ G ma element odwrotny a’ ∈ G tj. a • a’ = a’ • a = e Jeżeli ponadto działanie • jest przemienne to ( G, • ) nazywamy grupą przemienną lub abelową. W przeciwnym wypadku grupę nazywamy nieprzemienną. ( Podane warunki nazywa się aksjomatami grupy ) Podana definicję można ograniczyć zastępując warunki b), c) warunkami lewo lub prawo –stronnymi albo mieszanymi np. możemy uwzględnić jedynie warunki prawostronne : b’) ma element neutralny prawostronny e tj. a • e = a ; a, e ∈ G c’) każdy element a ∈ G ma element odwrotny prawostronny a’ ∈ G tj. a • a’ = e Jeżeli działanie • oznaczymy „+” ( dodawanie ) to mówimy , że grupa jest grupą addytywną. Dla grupy addytywnej element neutralny jest elementem zerowym zbioru G ( zero grupy), elementem odwrotnym będzie element „przeciwny” Aksjomaty b), c) możemy zapisać następująco : b) ma element zerowy 0 tj. a + 0 = 0 + a = a ; a, 0 ∈ G c) każdy element a ∈ G ma element przeciwny −a ∈ G tj. a + −a = −a + a = 0 Zapis : a + b = c nazywamy sumą elementów ( składników) a, b. Jeżeli działanie • nazwiemy „mnożeniem” to mówimy, że grupa jest grupą multiplikatywną. Dla grupy multiplikatywnej elementem neutralnym jest elementem jednostkowym zbioru G (jedyność grupy),
elementem odwrotnym do elementu a, będzie element 1/a. ( a-1 ) Aksjomaty b), c) możemy zapisać następująco : b) ma element jednostkowy 1 tj. a • 1 = 1 • a = a ; a, 1 ∈ G c) każdy element a ∈ G ma element przeciwny 1/a ∈ G tj. a • 1/a = 1/a • a = 1 Zazwyczaj dla „klasycznie” określonego mnożenia pomijamy znak • pisząc porostu ab = c Działanie takie nazywamy w tym przypadku iloczynem dwóch czynników. Zarówno działanie mnożenia jak i dodawania możemy definiować na różne sposoby np. jeżeli G jest zbiorem macierzy (nieosobliwych) mnożenie możemy zdefiniować jako „klasyczne” mnożenie macierzy. Dodawanie może być określone np. jako dodawanie modulo. Zatem formalnie. Niepusty zbiór G nazywa się grupą, jeśli zdefiniowano w nim operacje grupową ( standardowo zapisywana multiplikatywnie i nazywaną mnożeniem ) G × G → G (x, y ) → x • y, przy czym spełnione są aksjomaty : * ( x • y ) • z = x • ( y • z ) , dla wszystkich x, y, z ∈ G (łączność ) * istnieje element jednostkowy e = eG ∈ G taki, że e • x = x • e, dla wszystkich x ∈ G
* dla każdego x−1 ∈ G istnieje element odwrotny x ∈ G, taki że x • x−1 = x−1 • x = e.
Grupa trywialna jest to grupa składająca się z jednego jedynego elementu e, gdzie e • e = e = e−1
Przykłady grup. a) Grupą addytywną jest zbiór liczb całkowitych z operacją dodawania + ( o “zwykłych” własnościach ) b) Grupą multiplikatywną jest zbiór wszystkich liczb wymiernych różnych od zera z operacją mnożenia ( o „zwykłych” własnościach) c) Grupą jest zbiór wszystkich wektorów na płaszczyźnie wraz z standardowo określoną operacją dodawania wektorów. d) Grupa jest zbiór wszystkich macierzy kwadratowych, nieosobliwych stopnia n o elementach rzeczywistych ze względu na operacje mnożenia macierzy.

28
Grupami nie są np. zbiór liczb całkowitych ze względu na operacje mnożenia ( ponieważ do liczby całkowitej różnej od ± 1nie istnieje liczba odwrotna, która była by liczbą całkowitą ) Grupy nie tworzy również zbiór wszystkich wektorów przestrzeni trójwymiarowej względem mnożenia wektorowego ( ponieważ operacja ta nie jest przemienna ) Podstawowe typy struktur algebraicznych. Istnieje siedem podstawowych typów struktur algebraicznych : Półgrupa, grupa, pierścień, ciało, moduł, przestrzeń liniowa, algebra. Półgrupą nazywamy parę (Z, • ), złożona ze zbioru Z (niepustego – półgrupa z jedynką tj. jedność – element neutralny półgrupy może być jedynym elementem zbioru Z ) i działania wewnętrznego •, które jest łączne. Grupą nazywamy parę (Z, • ), złożona ze zbioru Z (niepustego ), gdzie działanie wewnętrzne • (mnożenie lub dodawanie ) jest łączne, nadto istnieje element neutralny (jednostkowy w przypadku grypy multiplikatywnej i zerowy w przypadku grupy addytywnej ), Element jednostkowy oznacza się zazwyczaj jako e
Każdy element grupy a posiada element odwrotny : a−1 -dla grupy multiplikatywnej, −a -dla grupy addytywnej. Jeśli działanie • jest przemienne, to grupę nazywamy grupą komutatywną – przemienną – abelową. Pierścieniem nazywamy zespół ( Z, +, • ), złożony ze zbioru Z i dwóch operacji wewnętrznych, określonych na elementach tego zbioru : dodawania + i mnożenia •. Dodawanie jest przemienne i łączne, zbiór Z zawiera element neutralny dla tego działania – zero 0. Mnożenie jest działaniem łącznym i rozdzielnym względem dodawania, zbiór Z zawiera element neutralny dla tego działania – jedność e. Przy czym nie koniecznie e ≠ 0.
Każdy element a ∈Z posiada element odwrotny a−1. Ciałem nazywamy zespół (Z, +, • ) o działaniach spełniających warunki takie jak dla pierścienia, ponadto w zbiorze Z istnieje element jednostkowy różny od zerowego tj. teraz e ≠ 0, mnożenie jest przemienne, a każdy element
a ∈A\ {0} posiada element odwrotny a−1. Modułem (moduł nad pierścieniem P, P-moduł ) nazywamy zespół (A, P, +, • ) złożony ze zbioru A, pierścienia P i dwóch operacji. Dodawanie jest działaniem wewnętrznym, a mnożenie jest działaniem zewnętrznym. Przestrzenią liniową (przestrzeń wektorowa ) nazywamy zespół (A, Z, +, • ) złożony ze zbioru A, z ciała F, z dodawania określonego w zbiorze A i mnożenia zewnętrznego. Algebrą nazywamy zespół ( A, Z, +, • , ° ) złożony ze zbioru A, ciała F, dwu działań – dodawania i mnożenia
określonych w zbiorze A i mnożenia zewnętrznego. µ(ab) = µ(b) ° µ(a)
______________________________________________________________________________________________ Niech F – będzie ustalonym ciałem. Przestrzeń liniowa A nad ciałem F nazywa się F- algebrą (lub inaczej algebrą nad ciałem F ), jeśli jest w nim określona F- biliniowa operacja – mnożenie : A × A → A , (a, b) → a • b dla wszystkich a, b ∈ A taka, że : * a • ( λ • b + µ • c ) = λ • ( a • b ) + µ • (a • c ) * ( λ • a + µ • b ) • c = λ • ( a • c ) + µ • ( b • c ) dla wszystkich a, b, c ∈ A; λ, µ ∈ F Jest również określona kategoria algebr A£ = A£F, której obiekty są algebrami (nad F ), a morfizmy z algebry A w
algebrę B – liniowe ( dokładniej F- liniowe ) odwzorowanie : f : A → B takie, że f(a • b ) f(a) • f(b) dla wszystkich a, b ∈ A Z definicji mnożenie jest operacją biliniową w przestrzeni liniowej A ∈ Ob A£F, dlatego zgodnie z uniwersalną
własnością iloczynu tensorowego istnieje jednoznaczne odwzorowanie liniowe µ = µA : A ⊗ A → A takie, że
a • b =µ(a ⊗ ) dla wszystkich a, b ∈ A

29
Dogodność takiej definicji polega na tym, że pozostajemy w kategorii przestrzeni liniowych nad F i możemy wykorzystać wszystkie jej możliwości. I tak, odwzorowanie liniowe f : A → B, gdzie A, B – algebry, jest izomorfizmem algebr, jeśli : f ° µA = µB ° ( f ⊗ f )
tj. jeśli następujący diagram jest przemienny :
Algebra A nazywa się unitalną, jeśli istnieje w niej element jednostkowy e = eA ∈ A taki, że :
a • e = e • a = a dla wszystkich a ∈ A Innymi słowy, istnieje odwzorowanie liniowe ε = εA : F → A takie, że następujący diagram jest przemienny :
Oczywiście ε(1) = e dla jedności 1 ∈ F (wyjaśnijmy, że id = idA – jest odwzorowaniem tożsamościowym w A i
zwróćmy uwagę, że F ⊗ L = L = L ⊗ F dla dowolnej przestrzeni liniowej L nad F ) Morfizm f z algebry unitalnej A w algebrę unitalną B nazywa się unitalnym, jeśli f(eA ) = f(eB ) tj. jeśli następujący
diagram jest przemienny :
Wymaganie unitalności algebry A w wielu przypadkach nie jest istotne, ponieważ każda algebra nie unitalna posiada rozszerzenie unitalne. W istocie – niech algebra A nie posiada jedności. Oznaczmy przez A^ = F ⊕F A sumę prostą dwóch przestrzeni liniowych nad F o elementach (λ, a) = λe + a; λ ∈ F, a ∈
A, gdzie e = (1, 0) ∈ A^ , a = (0, a) ∈ A^ i składowymi operacjami liniowymi : α(λe + a) + β(µe + b) = (αλ + βµ )e + ( αa + βb ) dla wszystkich α, β, λ, µ ∈ F ; a, b ∈ A. Wprowadzimy w przestrzeni liniowej A^ mnożenie w taki sposób, aby element e stał się jednością, a algebra A stała się podalgebrą algebry A^. Mianowicie, przyjmijmy : (λe + a) • ( µe + b ) = (λµ)e + (µa + λb + a • b ) dla wszystkich λ, µ ∈ F ; a, b ∈ A Łatwo można sprawdzić, ze przy takiej definicji wszystkie aksjomaty mnożenia są spełnione. Zatem A^ jest unitalnym rozszerzeniem algebry A. Algebra A nazywa się komutatywną (przemienną), jeśli : a • b = b • a dla wszystkich a, b ∈ A W języku diagramów oznacza to, że następujący diagram jest przemienny :
gdzie permutacja σ zadana jest zasadą σ(a ⊗ b ) = b ⊗ a dla wszystkich a, b ∈ A.
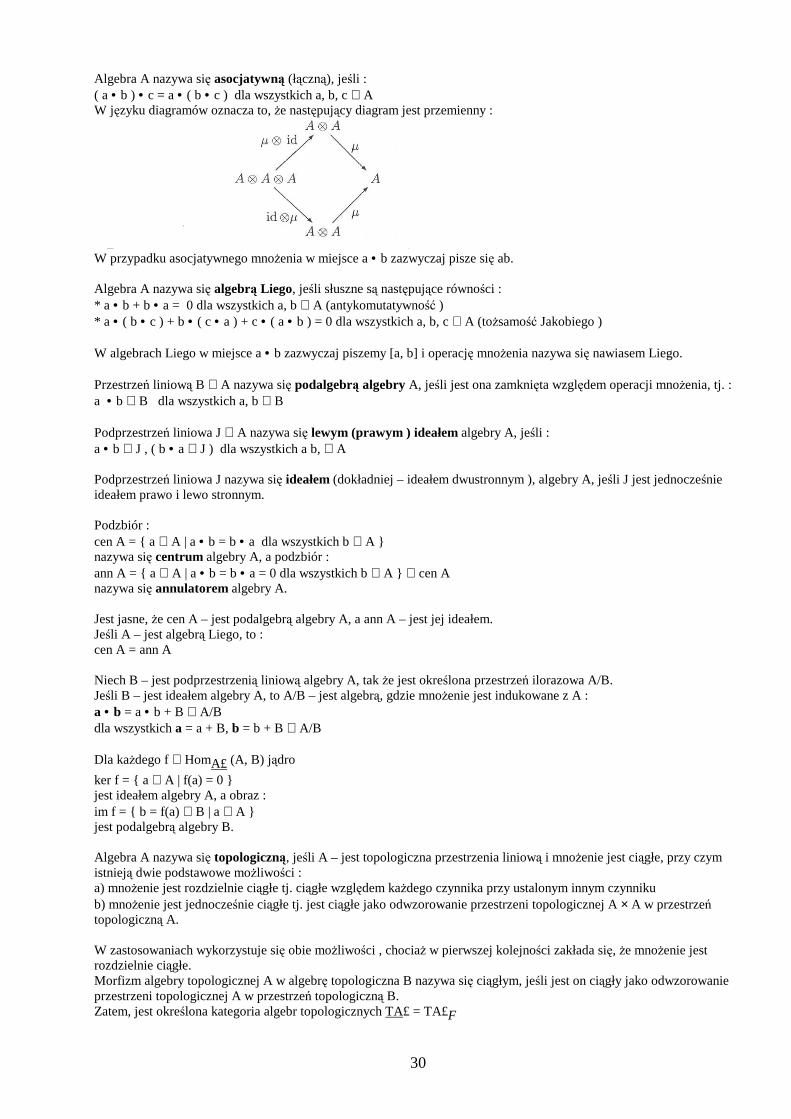
30
Algebra A nazywa się asocjatywną (łączną), jeśli : ( a • b ) • c = a • ( b • c ) dla wszystkich a, b, c ∈ A W języku diagramów oznacza to, że następujący diagram jest przemienny :
W przypadku asocjatywnego mnożenia w miejsce a • b zazwyczaj pisze się ab. Algebra A nazywa się algebrą Liego, jeśli słuszne są następujące równości : * a • b + b • a = 0 dla wszystkich a, b ∈ A (antykomutatywność ) * a • ( b • c ) + b • ( c • a ) + c • ( a • b ) = 0 dla wszystkich a, b, c ∈ A (tożsamość Jakobiego ) W algebrach Liego w miejsce a • b zazwyczaj piszemy [a, b] i operację mnożenia nazywa się nawiasem Liego. Przestrzeń liniową B ⊂ A nazywa się podalgebrą algebry A, jeśli jest ona zamknięta względem operacji mnożenia, tj. : a • b ∈ B dla wszystkich a, b ∈ B Podprzestrzeń liniowa J ⊂ A nazywa się lewym (prawym ) ideałem algebry A, jeśli : a • b ∈ J , ( b • a ∈ J ) dla wszystkich a b, ∈ A Podprzestrzeń liniowa J nazywa się ideałem (dokładniej – ideałem dwustronnym ), algebry A, jeśli J jest jednocześnie ideałem prawo i lewo stronnym. Podzbiór : cen A = { a ∈ A | a • b = b • a dla wszystkich b ∈ A } nazywa się centrum algebry A, a podzbiór : ann A = { a ∈ A | a • b = b • a = 0 dla wszystkich b ∈ A } ⊂ cen A nazywa się annulatorem algebry A. Jest jasne, że cen A – jest podalgebrą algebry A, a ann A – jest jej ideałem. Jeśli A – jest algebrą Liego, to : cen A = ann A Niech B – jest podprzestrzenią liniową algebry A, tak że jest określona przestrzeń ilorazowa A/B. Jeśli B – jest ideałem algebry A, to A/B – jest algebrą, gdzie mnożenie jest indukowane z A : a • b = a • b + B ∈ A/B dla wszystkich a = a + B, b = b + B ∈ A/B Dla każdego f ∈ HomA£ (A, B) jądro
ker f = { a ∈ A | f(a) = 0 } jest ideałem algebry A, a obraz : im f = { b = f(a) ∈ B | a ∈ A } jest podalgebrą algebry B. Algebra A nazywa się topologiczną, jeśli A – jest topologiczna przestrzenia liniową i mnożenie jest ciągłe, przy czym istnieją dwie podstawowe możliwości : a) mnożenie jest rozdzielnie ciągłe tj. ciągłe względem każdego czynnika przy ustalonym innym czynniku b) mnożenie jest jednocześnie ciągłe tj. jest ciągłe jako odwzorowanie przestrzeni topologicznej A × A w przestrzeń topologiczną A. W zastosowaniach wykorzystuje się obie możliwości , chociaż w pierwszej kolejności zakłada się, że mnożenie jest rozdzielnie ciągłe. Morfizm algebry topologicznej A w algebrę topologiczna B nazywa się ciągłym, jeśli jest on ciągły jako odwzorowanie przestrzeni topologicznej A w przestrzeń topologiczną B. Zatem, jest określona kategoria algebr topologicznych TA£ = TA£F

31
Przykład 1.4.1 Ciało F jest najprostszą nietrywialną algebrą, przy czym jest ona unitalna, asocjatywna i przemienna. Przykład 1.4.2 Zbiór M (D, F ) wszystkich macierzy kwadratowych rzędu D o elementach należących do F jest unitalną algebrą asocjatywną z standardowo określonymi operacjami. Przykład 1.4.3 Zbiór : sl(D, F) = { a ∈ M (D, F) | tr(a) = 0 } wszystkich macierz z M (D, F ) o zerowym śladzie ( tr(a) – ślad macierzy a ) jest algebrą Liego nad F o komutatorze : [a, b] = ab − ba dla a, b ∈ sl(D, F ) w charakterze nawiasu. Przykład 1.4.4 Zbiór :
u(D, C ) = { a ∈ M (D, C ) | a† = − a }
wszystkich macierzy skośniehermitowskich z M (D, F ) ( a† = a−’ – sprzężenie hermitowskie, kreseczka – sprzężenie zespolone, prim – transponowanie ) jest algebrą Liego nad R o komutatorze w charakterze nawiasu Liego. Algebraiczno- geometryczne podstawy fizyki matematycznej - W. W. Żarinow www.fizyka-teoretyczna.pl/tlumaczenia/Algebraiczno-geometryczne_podstawy.pdf ____________________________________________________________________________________________ 2. Przestrzenie wektorowe. 2.1 Oznaczenia. Niech X – będzie przestrzenią wektorową nad ciałem F. Będziemy rozpatrywali układy e = ( ei )i∈I zestawione z
elementów przestrzeni X ( gdzie I – dowolny zbiór indeksów ). Sumy skończone : x = Σi λi ei (2.1)
gdzie λi ∈ F (gdzie dla co najwyżej skończonej liczby indeksów i λi = 0 ) nazywamy kombinacjami liniowymi
elementów ei (i ∈ I ). Zbiór Fe wszystkich takich kombinacji liniowych nazywa się warstwą liniową układu e.
Jest jasne, że Fe jest podprzestrzenią przestrzeni wektorowej X. Jeśli X 1 = Fe, to przyjęto również mówić, ze
podprzestrzeń X1 jest napięta na układzie e.
Układ e nazywa się liniowo niezależnym (odpowiednio – zupełnym ), jeśli równość x = 0 w (2.1) jest możliwa tylko przy λi = 0 dla wszystkich i ∈ I (odpowiednio Fe = X )
Warunek liniowej niezależności jest równoważny temu, ze każdy rozkład (2.1) jest jednoznaczny. W tym przypadku (2.1) zapisujemy w postaci : x = Σi xi ei (2.2)
gdzie współczynniki xi (i ∈ I ) są określone jednoznacznie przez wektor x.
Przyjmiemy w tym przypadku xi = εi(x). Współczynniki xi ( i ∈ I ) nazywają się współrzędnymi wektora x
(względem e ). Każdy całkowicie niezależny liniowo układ e w przestrzeni X nazywa się baza przestrzeni X. W tym przypadku każdy wektor x ∈ X można zapisać jednoznacznie w postaci (2.2) o współrzędnych xi = εi(x).
Przykład 1. Przestrzeń współrzędnościowa Fn (p.p. 1.3 ) posiada bazę złożoną z elementów ei = ( 0, ... ,0 ,1 , ... ,1 ) z
jednością na i-tym miejscu.
W tym przypadku zapis x = (x1, ... , xn ) określa współrzędne xi = εi(x) wektora x ∈ Fn ze względu na bazę (ei ),
gdzie i = 1, ... , n. Przykład 2. Niech F[M] ⊂ F(M) – zbiór wszystkich funkcji „skończonych” f : M → F, tj. funkcji różnych od zera tylko w skończonej liczbie punktów x ∈ M. Jest jasne, że F[M] jest przestrzenia wektorową ( podprzestrzenią w F(M)) z bazą złożoną z „δ- funkcji” δa ( a ∈ M ), gdzie δa(x) = 0 przy x ≠ a, δa(a) = 1.

32
W dalszej kolejności będziemy utożsamiali a ∈ M z δ- funkcją δa ∈ F[M]. Odpowiednio, M jest włożone ( w charakterze
bazy ) w F[M]. Przestrzeń F[M] nazywa się liniową warstwą formalną (nad ciałem F) zbioru M. 2.2 Bazy. Zgodnie ze znanym twierdzeniem Hammela ( zobacz np. Бах ), każda przestrzeń wektorowa X nad ciałem F posiada bazę. Dowód tego twierdzenia sprowadza się do wykorzystania zasady maksimum (lemat Zorna ) w celu zbudowania maksymalnego (względem inkluzji ) liniowo niezależnego układu w przestrzeni X. Łatwo można sprawdzić (ćwiczenie ), że każdy taki układ jest bazą w przestrzeni X. Istotne uściślenie twierdzenia Hammela polega na następującym : każde dwie bazy przestrzeni X mają równą moc. Dalej naszkicujemy dowód tego stwierdzenia. Jeśli X posiada bazę skończoną, to stwierdzenie to można łatwo sprawdzić (ćwiczenie ). Pozostaje rozpatrzyć ten przypadek, kiedy X posiada bazy A, B o nieskończonych mocach – liczbach kardynalnych : α = card A, β = card B Zauważmy, że A można przedstawić w postaci dysjunktywnej sumy podzbiorów An ( n ∈ N ), gdzie An składa się z
elementów a ∈ A, każdy z których jest kombinacją liniową o niezerowych współczynnikach równo n elementów b ∈ B.
Łatwo można sprawdzić, że card An ≤ nβn
Stąd : ∞
α ≤ Σi nβn (2.2)
n=1
Jak wiadomo (zobacz np. ВШ ), β2 = β dla każdej nieskończonej liczby kardynalnej β, tak że βn = β dla wszystkich
n ∈ N. Oprócz tego prawa część (2.3) pokrywa się z β. Stąd α ≤ β. Analogicznie (na mocy symetrii ) β ≤ α. W wyniku tego α = β. Zatem, z każda przestrzenią wektorową X wiąże się jednoznacznie liczba kardynalna dim X, nazywana wymiarem przestrzeni X i określona jako moc dowolnej bazy w przestrzeni X. Przestrzeń X nazywa się skończeniewymiarową (odpowiednio – nieskończenie wymiarową ), jeśli jej wymiar dim X jest skończony ( nieskończony ).
Przykład 1. dim Fn = n Przykład 2. Istnieją przestrzenie wektorowe o dowolnym wymiarze A, mianowicie dim F[M] = card M. Ćwiczenie. Sprawdzić (analogicznie do twierdzenia Hammela ), że każdy liniowo niezależny układ w przestrzeni X jest zawarty w pewnej bazie przestrzeni X. Przykładowo, każdy wektor 0 ≠ x ∈ X można włączyć do pewnej bazy przestrzeni X. 2.6 Przestrzenie sprzężone. Przestrzeń wektorowa X*, składająca się ze wszystkich F- wartościowych funkcji liniowych (funkcjonałów ) nad przestrzenią X, nazywa się przestrzenią sprzężoną do przestrzeni wektorowej X ( X* = Hom(X, F )) Zgodnie z (2.5), każdy funkcjonał f ∈ X* może być zapisany jednoznacznie w postaci : f(x) = Σi fi xi (2.8)
gdzie xi = εi(x) – współrzędne wektora x względem bazy e ( p.p 2.1 ), fi ∈ F – dowolny zbiór współczynników,
określających dany funkcjonał f. W tym sensie (2.8) można zapisać tak :
X* ≈ Fα (2.9) gdzie α = dim X. Niech e = (ei )i∈I – liniowo niezależny układ w X.
Pokażemy teraz, że w X* istnieje układ dualny εi ( i ∈ I ), określony zgodnie z zasadą :
εi(ei ) = δij (2.10)
gdzie δij – symbol Kroneckera ( δij = 0 przy i ≠ j , δii = 1 )
33
W istocie – układ e może być rozszerzony do bazy przestrzeni X ( p.p. 2.2 ). W tym przypadku εi(x) = xi są to współrzędne wektora x ∈ X w bazie e (p.p 2.1 )
W szczególności, dla każdego 0 ≠ x ∈ X istnieje f ∈ X*, dla którego f(x)≠ 0. Wykorzystanie bazy dualnej pozwala jawnie wypisać elementy macierzowe (2.6) operatora a, mianowicie : aij = ϕi(aej ) (2.11)
gdzie ϕi (i ∈ I ) – układ, dualny do bazy fi (i∈ I ) przestrzeni Y.
Przykład 1. Przestrzeń Fn można utożsamić ze swoją przestrzenią dualną zgodnie z zasadą (2.8), gdzie i = 1, ... , n Przykład 2. Przestrzeń, sprzężona do F[M], może być utożsamiona z F(M) zgodnie z zasadą : g(f) = Σx f(x) g(x)
gdzie f ∈ F[M], g ∈ F(M).
ćwiczenie. Jeśli α = dim X jest nieskończone, to dim X* = 2α (Podpowiedź : bazę przestrzeni F(M) zestawiają funkcje charakterystyczne podzbiorów N ⊂ M ). 2.7 Formy biliniowe. Forma biliniowa f : X × Y → Z (w kategorii VECTF ) nazywa się niezdegenerowaną , jeśli dla każdego 0 ≠ x ∈ X
(odpowiednio 0 ≠ y ∈ Y ) istnieje y ∈ Y (odpowiednio x ∈ X ), dla którego f(x, y) ≠ 0. Warunek niezdegenerowania formy f jest równoważny injektywności każdego z odwzorowań : x → fx , y → fy , gdzie :
fx(y) = f(x, y) = fy(x) (2.12)
W tym sensie (2.12) określa włożenie X (odpowiednio Y ) w Hom(Y, Z) (odpowiednio Hom(X, Z) ). W przypadku ogólnym lewe jądro kerλ f ( odpowiednio prawe jądro kerρ f ) formy f jest określone jako jądro
odwzorowania x → fx ( odpowiednio y → fy ).
Zatem, niezdegenerowanie formy f oznacza, że : kerλ f = kerρ f = 0
Podstawowe struktury i metody teorii reprezentacji - D. P. Żełobenko www.fizyka-teoretyczna.pl/tlumaczenia/Podstawowe_struktury_teorii_reprezentacji.pdf ________________________________________________________________________________________________ VI. Przestrzenie liniowe z iloczynem skalarnym. Chociaż wektorów nie można mnożyć między sobą, tak jak mnoży się liczby, to można zdefiniować operację mnożenia, która odwzorowuje dowolną parę wektorów na liczbę. Taka operacja uogólnia iloczyn skalarny, znany z wykładu geometrii. Definicja. Iloczynem skalarnym określonym na przestrzeni Q nazywamy symetryczną, dodatnio określoną formę dwuliniową. ( tj. każdej parze wektorów p, q ∈ Q przyporządkowujemy liczbę rzeczywistą )
Przestrzeń liniową Qn ( rzeczywistą ) w której została określona forma dwuliniowa o podanych własnościach nazywamy n-wymiarową przestrzenią Euklidesa. Przykład. Niech będzie dana przestrzeń liniowa Q. Wektory w przestrzeni Q określamy jako ciągi liczb : x = (x1, ... , xn ) , y = (y1, ... , yn )
Iloczyn skalarny dwóch wektorów możemy zdefiniować następująco : (x , y ) = x1y1 + x2 y2 + …. + xn yn
tj. przyjęliśmy macierz formy dwuliniowej o postaci A = diag (1, 1, ...., 1 )

34
Definicja A.9 Dla dowolnych dwóch wektorów | a >, | b > ∈ V zdefiniujemy ich iloczyn skalarny ( inner/scalar product lub też overlap ) i liczbę < a | b > ∈ C, taką że : 1) dla dowolnych trzech wektorów | a >, | b >, | c > ma miejsce równość : < a | ( | b > + | c > ) = < a | b > + < a | c > 2) dla dowolnych dwóch wektorów | a >, | b >, oraz liczby λ ma miejsce równość : < a | ( λ | b > ) = λ < a | b > 3) dla dowolnych dwóch wektorów | a >, | b > słuszne jest : < a | b > = < b | a >* 4) dla dowolnego | a > , < a | a > jest liczbą nieujemną, przy czym < a | a > = 0 w tym i tylko w tym przypadku, jeśli | a > = 0
Ćwiczenie A.14 W geometrii iloczyn skalarny dwóch wektorów a→ = ( xa , ya ) i b→ = ( xb , yb ) ( gdzie współrzędne
s rzeczywiste ) jest definiowany tak :
a→ • b→ = xa xb + ya yb
Pokazać, że taka definicja spełnia w/w własności iloczynu skalarnego. Ćwiczenie A.15 Niech wektor | x > będzie zapisany w postaci kombinacji liniowej pewnych wektorów | ai > :
| x > = Σi λi | ai >
Dla dowolnego innego wektora | b > pokazać, że : < b | x > = Σi λi < b | ai >, oraz < x | b > = Σi λi* < ai | b >
Ćwiczenie A.16 Dla dowolnego wektora | a > pokazać, że : < zero | a > = < a | zero > = 0 Definicja A.10 Mówimy, że | a > i | b > są ortogonalne (wzajemnie ), jeśli : < a | b > = 0 Ćwiczenie A.10 Dowieść, że zbiór niezerowych, wzajemnie ortogonalnych wektorów jest niezależny. Definicja A.11 || | a > || = sqrt( < a | a > ) nazywa się normą (długością ) wektora a. Wektory o normie równej 1 nazywają się unormowanymi. Dla zadanego wektora | a > wielkość : N = 1/ || | a > || tj. taka wielkość, że wektor N | a > jest unormowany, nazywa się czynnikiem normującym. Ćwiczenie A.18 Pokazać, że przy pomnożeniu wektora przez czynnik fazowy exp(iϕ), ϕ - liczba rzeczywista, jego norma nie zmienia się. Definicja A.12 Przestrzeń liniowa w której określono iloczyn skalarny, nazywa się przestrzenią Hilberta. Definicja. Długością wektora p ∈ Q nazywamy liczbę √ (p, p) tj. wartość pierwiastka kwadratowego z formy kwadratowej wektora p. Długość wektora oznaczymy | . | Iloczyn skalarny oznaczymy (. , . ) ( w miejsce kropek należy wstawić odpowiednie wektory ) Oczywiście | p | = 0 ⇔ p = 0 tj. długość wektora jest równa zeru wtedy i tylko wtedy gdy jest on wektorem zerowym Definicja. Kątem między wektorami p, q ∈ Q nazwiemy liczbę : φ = arccos [ ( p, q ) / | p | | q | ] cos(φ) = ( p, q ) / | p | | q | , 0 ≤ φ ≤ π Dwa niezerowe wektory nazwiemy ortogonalnymi, jeżeli kąt między nimi jest równy ½ π tj. jeżeli ( p, q ) = 0 Twierdzenie. Dla dowolnych dwóch wektorów p, q ∈ Q zachodzi następująca nierówność ( nierówność Cauchy-Buniakowskiego ) : ( p, q )( p, q ) ≤ ( p, p )( q, q ) ⇒ | p + q | ≤ | p | + | q |
35
Twierdzenie. Dla dowolnych wektorów ortogonalnych z przestrzeni Q spełniona jest równość :
| p + r + ... + q |2 = | p |2 + | r |2 + … + | q |2 ( łatwo zauważyć, że z tego twierdzenia wynika twierdzenie Pitagorasa ) Definicja. Wektor o długości 1 nazywamy „wektorem jednostkowym (unormowanym)” Każdy niezerowy wektor q można unormować, mnożąc go przez odpowiedni skalar : q / | q | = 1 Definicja. Bazę przestrzeni Q { ei } nazywamy „ortogonalną” jeśli ( ei , ej ) = δij . Jeśli ponadto ( ei , ei ) = 1 to bazę
nazywamy „ortonormalną”. Definicja. Dwie podprzestrzenie Q1 ⊂ Q i Q2 ⊂ Q takie , że Q1∩ Q2 = ∅ nazywamy wzajemnie ortogonalnymi jeśli
∀ f(a, b) = 0 a∈Q1 b∈Q2
Jeżeli przestrzenie Q1 i Q2 są ortogonalne to relacje taką oznaczamy Q1 ⊥ Q2.
Przestrzeń symplektyczna. Przestrzeń liniową w której określono antysymetryczną, niezdegenerowaną formę dwuliniowa ( antysymetryczny iloczyn skalarny ) nazywamy przestrzenia symplektyczną. Przestrzeń symplektyczna ma zawsze wymiar parzysty. Przestrzenie symplektyczne wykorzystywane są w mechanice w ujęciu Hamiltona. Przestrzenie z metryką nieokreśloną. Przestrzenie pseudoeuklidesowe. Przestrzeń Minkowskiego. Do tej pory rozważaliśmy metryki, dla których odpowiadające im formy metryczne były dodatnio określone. Rozważając jednak ogólną postać symetrycznej formy dwuliniowej zadanej wzorem ( forma kwadratowa sprowadzona do postaci diagonalnej ) : f( x , y ) = x1y1 + ... + xs ys – xs+1 ys+1- ... - xnyn
możemy zorientować się, że długość wektora może być zarówno dodatnia jak i ujemna. Może mieć również wartość równą zeru dla wektora niezerowego ( taki wektor nazywamy izotropowym ). Jeśli 1 ≤ s ≤ n-1 to przestrzeń liniową nazywamy „przestrzenią pseudoeuklidesową” , dla s = 1 i n = 4 przestrzeń pseudoeuklidesową nazywamy „przestrzenią Minkowskiego” ( w fizyce możemy spotkać się również z odwróconą sygnaturą formy metrycznej ) Przestrzeń Minkowskiego odgrywa kluczową rolę w STW. Baza ortounormowana (ortonormalna ) Definicja A.13 Bazą ortonormalną (ortounormowaną ) { | vi > } nazywamy bazę której elementy są wzajemnie
ortogonalne i posiadają normę równą 1, tj. : < vi | vj > = δij (A.3)
gdzie δij – symbol Kroneckera.
Ćwiczenie A.19 Pokazać, że dowolny zbiór ortounormowany złożony z N wektorów ( N = dim V ) tworzy bazę. Ćwiczenie A.20 Pokazać, że jeśli : ( a1 )
( a2 )
( … ) ( aN )
oraz ( b1 )
( b2 )
( … ) ( bN )
są rozkładami wektorów | a > i | b > względem pewnej bazy ortounormowanej, to ich iloczyn skalarny można zapisać tak : < a | b > = a1* b1 + … + aN* bN (A.4)
36
Równanie (A.4) może być wyrażone również w postaci macierzowej przy pomocy zasady “wiersz na kolumnę” tj. tak jak mnoży się dwie macierze
Jednym z obszarów zastosowania w/w zasad obliczania iloczynu skalarnego jest standardowa geometria przestrzenna. Jak wiemy z ćwiczenia A.10, współrzędne wektorów geometrycznych odpowiadają ich rozkładowi względem bazy ortounormowanej { i^, j^ }, dlatego nie jest dziwne, że ich iloczyn skalarny jest zadany przez równanie (A.4). Załóżmy, że obliczamy iloczyn skalarny jednej i tej samej pary wektorów zgodnie z (A.5) w dwóch różnych bazach. Wtedy w prawej stronie równania będą stały różne liczby i może się okazać, ze iloczyn skalarny również będzie zależał od wybranej bazy. Jednakże tak nie jest : zgodnie z definicją A.9, iloczyn skalarny określony jest dla pary wektorów i nie zależy od wyboru bazy. Ćwiczenie A.21 Pokazać, że współczynniki rozkładu : ( a1 )
( a2 )
( … ) ( aN )
wektora | a > względem bazy ortounormowanej można znaleźć w następujący sposób : ai = < vi | a > (A.6)
Innymi słowy : | a > = Σ < vi | a > | vi > (A.7)
Ćwiczenie A.22 Rozpatrzymy dwa wektory w dwuwymiarowej przestrzeni Hilberta : | ψ > = 4 | v1 > + 5 | v2 > ; | ϕ > = −2 | v1 > + 3i | v2 >
gdzie { | v1 >, | v2 > } – baza ortounormowana.
a) Pokazać, że zbiór : { | w1 > = ( | v1 > + i | v2 > )/ √2 , | w2 > = ( | v1 > − i | v2 > )/ √2 }
również jest bazą ortounormowaną. b) znaleźć macierze wektorów | ψ > i | ϕ > w obu tych bazach. c) Obliczyć iloczyn skalarny tych wektorów w obu bazach, wykorzystując (A.5). Pokazać, że takie iloczyny są równe. Ćwiczenie A.23 Pokazać, że jeśli | a > jest wektorem unormowanym, a { ai = < vi | a > } – jego rozkład w bazie
ortounormowanej { | vi > }, to :
Σ | ai |2 = 1 (A.8)
Ćwiczenie A.24 Załóżmy, że { | wi > } jest pewną bazą w V. Pokazać, że może ona być wykorzystana w celu znalezienia
bazy ortonormalnej { | vi > } na drodze zastosowania następującego równania – kolejno do każdego z elementów bazy :
k | vk+1 > = N [ | vk+1 > − Σ < vi | wk+1 > | vi >] (A.9)
i=1 gdzie N – współczynnik normalizacji. Procedura ta nazywa się procedurą Gramma – Schmidta. Ćwiczenie A.25* Dla wektora unormowanego | ψ > w N- wymiarowej przestrzeni Hilberta i dowolnej liczby naturalnej m ≤ N pokazać, że można znaleźć bazę { | vi > } taką, że :
m | ψ > = ( 1/√m ) Σ | vi >
i=1
37
Przestrzeń sprzężona. Iloczyn skalarny < a | b > można obliczać jako iloczyn macierzowy (A.5) wiersza i kolumny. Jeśli kolumna : ( b1 )
( b2 )
( … ) ( bN )
bezpośrednio odpowiada wektorowi | b >, to wiersz : ( a1*, a2*, ... , aN* )
otrzymujemy z kolumny odpowiadającej wektorowi | a >, poprzez transponowanie i sprzężenie zespolone. Możemy się umówić, że taki wiersz będziemy utożsamiali z wektorem < a |, który będziemy nazywali wektorem sprzężonym ( conjugate/adjoint ) z wektorem | a >. Definicja A.14 Dla przestrzeni Hilberta V definiujemy przestrzeń sprzężoną V’, która znajduje się w relacji odpowiedniości wzajemnie jednoznacznej z V, w następujący sposób : Dla każdego wektora | a > ∈ V istnieje jeden i tylko jeden wektor sprzężony < a | ∈ V’, posiadający własność : Adjoint ( λ | a > + µ | b > ) = λ* < a | + µ* < b | (A.12) Ćwiczenie A.28 Pokazać, że V’ – jest przestrzenią liniową. Ćwiczenie A.29 Pokazać, że jeśli { | v i > } jest bazą w V, to {< vi | } jest bazą w V’ i jeśli wektor | a > może być
rozłożony w bazie { | vi > } tak :
| a > = Σ ai* | vi >
to rozkład wektora z nim sprzężonego ma postać : < a | = Σ ai* < vi | (A.13)
Początkujący fizycy kwantowi często zapominają o sprzężeniu zespolonym w równaniu (A.13). Aby ugruntować się w jego zastosowaniu, proponujemy następujące proste ćwiczenie : Ćwiczenie A.30 Znaleźć macierzową formę wektora, sprzężonego z : | v1 > + i | v2 >
w bazie { < v1 | , < v2 | }.
Wektory „bezpośrednie” i wektory sprzężone nazywa się odpowiednio wektorami ket i wektorami bra. Nazewnictwo to wprowadził P. Dirac, wraz z ich symbolicznymi oznaczeniami < . | , | . >. Motywacja takiego zapisu tłumaczona jest tym faktem, że kombinacja wektorów bra- i ket postaci < a | b > bracket (nawias ) – daje nam iloczyn skalarny takich dwóch wektorów. Zwróćmy uwagę na fakt, że V i V’ – są to różne przestrzenie liniowe. Nie można zatem dodawać ze sobą wektora bra i ket. VII. Operatory liniowe. Operatory. Macierze. Funkcje operatorów. Przekształcenia (transformacje ) liniowe. Wcześniej rozważaliśmy specjalne przypadki odwzorowań liniowych – formy liniowe (odwzorowania przybierające wartości skalarne), teraz zajmiemy się ogólną definicją przekształcenia liniowego.
Definicja. Niech Qn i Pm będą dwiema przestrzeniami liniowymi nad ciałem K. Odwzorowanie :
f : Qn → Pm nazywamy „odwzorowaniem liniowym” ( przekształceniem liniowym ), jeżeli spełnia następujące warunki : a) ∀ f( q1+ q2 ) = f ( q1) + f (p2)
q1, q2 ∈Qn
b) ∀ f( α q ) = α f ( q)
q ∈Qn , α ∈K
38
Przekształcenia liniowe ( w ogólności ) są to odwzorowania, które wektorom przyporządkowują wektory. W szczególnym przypadku możemy rozważać odwzorowania postaci :
f : Qm → Pm, jak również f : Qm → Qn, oraz f : Qn → Qn.
Twierdzenie. Jeżeli f jest przekształceniem liniowym f : Qn → Pm to : n ≥ m tj. przekształcenie liniowe nie podwyższa wymiaru przestrzeni obrazu przekształcenia.
Twierdzenie. Niech Qn , Pm będą przestrzeniami liniowymi. Wtedy istnieje odpowiedniość wzajemnie jednoznaczna
między przekształceniami liniowymi f : Qn → Pm a macierzami n × m o wyrazach z ciała K tj. każdemu przekształceniu liniowemu odpowiada pewna ściśle określona macierz n × m i odwrotnie – każdej macierzy odpowiada jednoznacznie pewne przekształcenie liniowe. Algebra przekształceń liniowych może być sprowadzona do odpowiedniej algebry macierzy. ( w szczególności dodawaniu odwzorowań odpowiada dodawanie macierzy, iloczynowi ( złożeniu ) odwzorowań odpowiada iloczyn macierzy )
Definicja. Niech f będzie przekształceniem liniowym f : Qm → Pm. Przekształcenie to nazywamy nieosobliwym jeżeli jego macierz jest macierzą nieosobliwą. Podprzestrzeń inwariantna (niezmiennicza). Definicja. Podprzestrzeń Q’ przestrzeni Q nazywamy inwariantną względem przekształcenia liniowego f, jeśli obraz dowolnego wektora q tj. f(q) , q ∈ Q’ , również należy do Q’. Rozważmy jednowymiarową podprzestrzeń Q’ przestrzeni Q, generowaną przez pewien niezerowy wektor q ∈ Q’. ( podprzestrzeń Q’ jest więc zbiorem wektorów o postaci αq ). Aby podprzestrzeń Q’ była niezmiennicza wymagane jest aby wektor f(q) ∈ Q’ tj. aby był krotnością wektora q : f(q) = λq Definicja. Niezerowy wektor q spełniający powyższą zależność nazywamy wektorem własnym, przy tym skalar λ nazywamy wartością własną przekształcenia liniowego f(q). Definicja. Jądrem transformacji liniowej f : Q → P nazywamy podzbiór U tych wszystkich wektorów, których obrazem poprzez f jest wektor zerowy przestrzeni P. Na oznaczenie jądra transformacji liniowej f, używamy symbolu Ker f
Szczególnie ważne są jednowymiarowe inwariantne podprzestrzenie Q1, przestrzeni Qn.
Rozważmy ogólnie przekształcenie liniowe postaci : Aq = λq , q ∈ Q1 , Interesującym nas zagadnieniem będzie pytanie w jaki sposób znaleźć wartości i wektory własne przekształcenia liniowego.
Aby odpowiedzieć na to pytanie wybierzmy w przestrzeni Qn pewną bazę{ ei }, następnie rozpiszmy wektor q na
składowe q = q1e1 + q2 q2 + ... + qnen
Macierz przekształcenia A = [ aik ], zatem :
Aq = ( a11q1 + a12 q2 + ... + a1nqn ) e1 + ( a21q1 + a22 q2 + ... + a2nqn ) e2 + ...
... + ( an1q1 + an2 q2 + ... + annqn ) en = λ ( q1e1 + q2 q2 + ... + qnen )
Skąd na mocy jednoznaczności rozkładu wektora Aq względem bazy {ei } otrzymamy :
{ ( a11 − λ) q1 + a12 q2 + ... + a1nqn = 0
{ a21q1 + ( a22 − λ) q2 + ... + a2nqn = 0
{ ......................................................... { an1q1 + an2q2 + ... + ( ann − λ) qn = 0

39
Aby istniało niezerowe rozwiązanie tego jednorodnego układu równań jest konieczne i wystarczające aby jej wyznacznik był równy zeru : | a11− λ a12 ... a1n |
| a21 a22 − λ … a2n | = 0
| ............................... | | an1 an2 ... ann − λ |
Otrzymaliśmy równanie stopnia n względem λ. Wielomian φ(λ) nazywamy wielomianem charakterystycznym macierzy przekształcenia A, równanie φ(λ) = 0 nazywamy równaniem charakterystycznym macierzy przekształcenia liniowego A. Postać i pierwiastki wielomianu charakterystycznego nie zależą od wyboru bazy. Przykład. Znaleźć wartości własne i wektory własne przekształcenia liniowego A o macierzy : A = [ 1 2 ] [ 5 4 ]
Wielomian charakterystyczny ma postać : φ(λ) = det ( A – λ ) = | 1 − λ 2 | = λ2 – 5λ − 6 | 5 4 – λ | Pierwiastki charakterystyczne są równe : λ1 = 6 , λ2 = − 1
Wektory własne znajdujemy z dwóch układów równań, odpowiadającym dwóm wartością pierwiastków charakterystycznych : { ( 1 − λi ) q1 + 2q2 = 0 , i = 1, 2
{ 5q1 + ( 4 − λi ) q2 = 0
Szczególnie prostą postać przybiera macierz przekształcenia liniowego mającego n liniowo niezależnych wektorów własnych. Niech A będzie takim przekształceniem , a e1, .... , en niech będą jego liniowo niezależnymi wektorami
własnymi tj. : A ei = λi ei , i = 1, 2 , .... , n
Przyjmijmy wektory e1, .... , en jako bazę w przestrzeni Q, wtedy na mocy równań :
A e1 = λ1 e1
................. A en = λn en Macierz przekształcenia A, ma szczególnie prostą postać : [ λ1 0 0 .... 0 ]
[ 0 λ2 0 .... 0 ]
[ ...................... ] [ 0 0 0 λ1 ]
( jest to oczywiście macierz diagonalna ) Twierdzenie. Jeżeli przekształcenie liniowe A ma n liniowo niezależnych wektorów własnych, to wybierając je jako bazę sprowadzimy macierz przekształcenia A do postaci diagonalnej. I na odwrót – jeżeli w jakieś bazie macierz przekształcenia jest diagonalna, to wszystkie wektory tej bazy są wektorami własnymi. ________________________________________________________________________________________________ Działania z operatorami liniowymi. Definicja A.15 Operator liniowy A^ w przestrzeni liniowej V- jest to odwzorowanie ( Odwzorowanie – jest to funkcja, która ustanawia dla każdego elementu | a > ∈ V, jego unikalny „obraz” A^ | a > ) przestrzeni liniowej V na siebie, takie że dla dowolnych dwóch wektorów | a > , | b > oraz dowolnego skalara λ : A^ ( | a > + | b > ) = A^ | a > + A^ | b > (A.14a) A^ ( λ | a > ) = λA^ | a > (A.14b)

40
Ćwiczenie A.31 Określić, czy następujące odwzorowania są operatorami liniowymi :
( C2 jest przestrzenią liniowa kolumn ( x ) ( y ) zawierających po dwie liczby zespolone )
f) Obrót o kąt ϕ w przestrzeni liniowej, dwuwymiarowych wektorów geometrycznych (nad R ) Definicja A.16 Dla dwóch operatorów A^, B^ ich suma A^ + B^ jest operatorem, który odwzorowuje wektory zgodnie z zasadą : ( A^ + B^ ) | a > ≡ A^ | a > + B^ | a > (A.15) Dla dowolnego operatora A^ i dowolnego skalara λ ich iloczyn λA^ jest operatorem, który odwzorowuje wektory zgodnie z zasadą : (λA^ ) | a > ≡ λ( A^ | a > ) (A.16) Ćwiczenie A.32 Pokazać, że zbiór wszystkich operatorów liniowych nad przestrzenią Hilberta o wymiarze N sam jest przestrzenia liniową, w którym dodawanie i mnożenie przez skalary zadane jest przez równania – odpowiednio (A.15) i (A.16). a) Pokazać, że operatory A^ + B^ i λA^ są liniowe w sensie definicji A.15 b) Określić czemu jest równy element zerowy, oraz element przeciwny −A^, do zadanego A^ w przestrzeni operatorów liniowych. c) Pokazać, że w przestrzeni operatorów liniowych spełnione są wszystkie aksjomaty, wprowadzone w definicji A.1 Definicja A.17 Operator 1^, odwzorowujący każdy wektor przestrzeni V na samego siebie, nazywa się operatorem jednostkowym (tożsamościowym ) Zapisując iloczyn skalara przez operator jednostkowy, niekiedy opuszczamy symbol 1^ - jeśli, oczywiście kontekst nie dopuszcza dwuznaczności. Przykładowo, w miejsce tego aby zapisywać : A^ − λ1^ piszemy A^ − λ Definicja A.18 Dla operatorów A^, B^ ich iloczyn A^B^ jest operatorem, odwzorowującym każdy wektor | a > na : A^B^ | a > ≡ A^ (B^ | a > ) tj. aby znaleźć działanie operatora A^B^ na wektor, powinniśmy w pierwszej kolejności zastosować B^ do tego wektora, a potem A^. Ćwiczenie A.33 Pokazać, że iloczyn dwóch operatorów liniowych również jest operatorem liniowym. Porządek, w którym mnożymy dwa operatory jest istotny, ponieważ w przypadku ogólnym A^B^ ≠ B^A^. Jeśli dla dwóch dowolnych operatorów A^B^ = B^A^, to mówimy, że te operatory komutują ze sobą wzajemnie. Komutowanie, lub relacje komutacyjne między operatorami odgrywają bardzo ważną rolę w MQ i będziemy je omawiali w dodatku A.9.

41
Ćwiczenie A.34 Pokazać, że operatory obrotu przeciwnego do obrotu wskazówek zegara o kar ½ π, oraz odbicia względem osi horyzontalnej w liniowej przestrzeni dwuwymiarowych wektorów geometrycznych nie komutują. Ćwiczenie A.35 Pokazać, że mnożenie operatorów posiada własność łączności, tj. dla dowolnych dwóch operatorów słuszne jest : A^( B^C^) = (A^B^)C^ (A.17) Macierze. Można odnieść wrażenie, że dla pełnego opisania operatora liniowego powinniśmy wskazać wszystkie jego działania z każdym wektorem. Jednakże tak nie jest. W rzeczywistości, wystarczy tylko pokazać jak ten operator odwzorowuje elementy pewnej bazy { | v1> , ... , | vN > } w V
tj. wystarczy znać zbiór : { A^ | v1> , ... , A^ | vN > }
Wtedy dla dowolnego innego wektora | a >, który ma rozkład w postaci : | a > = a1 | v1 > + … + aN | vN >
na mocy liniowości otrzymujemy : A^ | a > = a1 A^ | v1> + … + aN A^ | vN> (A.18)
Jak dużo parametrów liczbowych należy podać, aby w pełni scharakteryzować operator liniowy ? Każdy obraz A^ | vj > dowolnego elementu bazy można rozłożyć względem tejże bazy :
A^ | vj > = Σ Aij | vi > (A.19)
i Dla każdego j zbiór N parametrów A1j , ... , ANj opisuje całkowicie A^ | vj >
Odpowiednio, zbiór złożony z N2 parametrów Aij , gdzie i, j zmieniają się od 1 do N, zawiera pełną informację o
operatorze liniowym. Definicja A.19 Macierzą operatora w bazie { | vi > } nazywamy tablicę kwadratową N × N, elementy której zadane są
równaniem (A.19). Indeks pierwszy w Aij jest numerem wiersza, a drugi – numerem kolumny.
Dla przykładu załóżmy, że musimy dowieść równości dwóch operatorów A^ = B^. Można to wykonać, pokazując identyczność macierzy takich operatorów : Aij i Bij w dowolnej bazie.
Ponieważ macierz zawiera pełną informację o operatorze , taki dowód jest wystarczający. Oczywiście, bazę należy wybrać tak, aby macierze Aij i Bij można było jak najprościej obliczyć.
Ćwiczenie A.36 Znaleźć macierz operatora 1^. Pokazać, że nie zależy ona od wyboru bazy. Ćwiczenie A.37 Znaleźć reprezentację macierzową wektora A^ | vj > w bazie { | vi > }, gdzie | vj > - element tej bazy; j
– jest zadane, a macierz A^ jest znana. Ćwiczenie A.38 Pokazać, że jeśli :
w pewnej bazie, to wektor A^ | a > zadany jest reprezentacja macierzową :
Ćwiczenie A.39 Macierze Aij i Bij operatorów A^ i B^ są zadane. Znaleźć macierze operatorów :
a) A^ + B^ b) λ A^ c) A^B^

42
Ostatnie dwa ćwiczenia pokazują, że operacje z operatorami i wektorami można łatwo przedstawić w języku macierzy i kolumn. Jednakże jest jena ważna uwaga : macierze wektorów i operatorów zależą od wybranej bazy – w odróżnieniu od „fizycznych” operatorów i wektorów, które są określone niezależnie od konkretnie wybranej bazy. Taką różnicą obowiązkowo należy uwzględniać, kiedy decydujemy o tym w jakiej notacji będziemy prowadzili obliczenia – w macierzowej, czy tez w notacji Diraca. Jeśli dla skrócenie wybierzecie notację macierzową, to zawsze należy pamiętać, w jakiej konkretnie bazie pracujecie i należy wszystkie macierze zapisywać w tej właśnie bazie. Ćwiczenie A.40 Pokazać, że elementy macierzy operatora A^ w bazie ortogonalnej { | vi > } zadane są przez wyrażenie :
Ćwiczenie A.41 Znaleźć macierze operatorów R^φ i R^θ odpowiadających obrotowi dwuwymiarowej przestrzeni
geometrycznej o kąty, odpowiednio φ, θ ( ćwiczenie A.31f ) Wykorzystując wynik ćwiczenia A.39, znaleźć macierz operatora R^φ R θ̂ i przekonać się o tym, że odpowiada ona
obrotowi o kat ( φ + θ ). Ćwiczenie A.42 Podać przykład bazy i określić wymiar przestrzeni liniowej operatorów liniowych nad przestrzenią Hilberta o wymiarze N ( zobacz ćwiczenie A.32 ). Iloczyny zewnętrzne. Definicja A.20 pod pojęciem iloczynu zewnętrznego ( outer product ) | a > < b | rozumiemy operator, działający w następujący sposób : ( | a > < b | ) | c > ≡ | a > ( < b | c > ) = ( < b | c > ) | a > (A.22) ( w drugiej równości uwzględniono ten fakt, że < b | c > reprezentuje sobą liczbę, zatem komutuje z dowolną wielkością ) Ćwiczenie A.43 Pokazać, że | a > < b | w sensie w/w definicji jest operatorem liniowym. Ćwiczenie A.44 Pokazać, że : ( < a | b > ) ( < c | d > ) = < a | ( | b > < c | ) | d > Ćwiczenie A.45. Pokazać, że macierz operatora | a > < b | zadana jest następująco :
Rezultat ten daje intuicyjne rozumienie iloczynu zewnętrznego. Jak mówiliśmy w poprzednim podrozdziale, wektor ket odpowiada kolumnie, a wektor bra – wierszowi. Zgodnie z zasadami mnożenia macierzy, iloczyn kolumny przez wiersz reprezentuje sobą macierz kwadratową, a odpowiedni iloczyn zewnętrzny – jest to po prostu operator, zadawany przez taką macierz. Ćwiczenie A.46 Niech Aij – macierz operatora A^ w bazie ortonormalnej { | vi >}. Pokazać, że :
A^ = Σi,j Aij | vi > < vj | (A.24)
Ćwiczenie A.47 Niech A^ - będzie operatorem, a {| vi >} – baza ortounormowana w przestrzeni Hilberta.
Wiadomo, że : A^ | v1 > = | w1 >, ... , A^ | vN > = | wN > , gdzie | w1 >, ... , | wN > - pewne wektory ( nie koniecznie ortonormalne ).
Pokazać, że : A^ = Σi | wi > < vi | (A.25)
Takie ćwiczenia pokazują zależność iloczynu zewnętrznego. Po pierwsze (A.24) daje sposób przeprowadzania macierzy operatora w notacje Diraca. Dany wynik jest dopełniający do równania (A.21), które jest wykorzystywane dla osiągnięcia celu odwrotnego – przeprowadzenia operatora z notacji Diraca w notacje macierzową. Po drugie, równanie (A.25) pozwala budować wyrażenie dla operatora w oparciu o nasze wiadomości o tym, jak ten operator odwzorowuje elementy dowolnej bazy ortounormowanej.

43
Zauważmy, że jest ono bardzo pożyteczne w praktyce, kiedy próbujemy wiązać operator z procesem fizycznym. Dalej podajemy dwa ćwiczenia w celu wypraktykowania i wykorzystania podanych wyników, dalej sformułujemy jeszcze jedno ważne zastosowanie iloczynu zewnętrznego. Ćwiczenie A.48 Macierz operatora A^ w bazie { | v1 >, | v2 > } jest równa :
( 1 −3i ) ( 3i 4 ) Wyrazić ten operator w notacji Diraca. Ćwiczenie A.49 Niech { | v1 >, | v2 > } – będzie bazą ortounormowaną w dwuwymiarowej przestrzeni Hilberta.
Załóżmy, że operator A^ odwzorowuje : | u1 > = ( | v1 > + | v2 > ) /√2 na | w1 > = √2 | v1 >
a | u2 > = ( | v1 > − | v2 > ) /√2 na | w2 > = √2 ( | v1 > + 3i | v2 > )
Znaleźć macierz A^ w { | v1 >, | v2 > }.
Ćwiczenie A.50 Pokazać, że dla dowolnej ortounormowanej bazy { | vi > } :
Σi | vi > < vi | = 1^ (A.26)
Wynik ten ( rozkład jedności ) jest użyteczny dla następującego zastosowania : Załóżmy, że znamy macierz operatora A^ w pewnej bazie ortounormowanej { | vi >} i chcemy znaleźć jego macierz w
drugiej bazie ortounormowanej { | wi >}.
Można to wykonać, w następujący sposób :
Centralny obiekt w ostatnim wierszu – element macierzy A^ w „starej” bazie { | vi >}.
Ponieważ znamy iloczyny skalarne wszystkich par elementów w starej i nowej bazie, to możemy wykorzystać podane wyrażenia, aby znaleźć każdy element macierzy a^ w nowej bazie. Dany przykład będziemy wykorzystywali w całej książce. Obliczenia można uprościć, jeśli zinterpretować ostatni wiersz (A.27) jako iloczyn trzech macierzy. Przykład podano w kolejnym ćwiczeniu. Ćwiczenie A.51 Znaleźć macierz operatora A^ z ćwiczenia A.48 w bazie { | w1 >, | w2 > }, takiej że :
| w1 > = ( | v1 > + i | v2 > ) /√2 (A.28)
| w2 > = ( | v1 > − i | v2 > ) /√2
a) Wykorzystując notacje Diraca, rozpoczynając od wyniku ćwiczenia A.48, a następnie wyrazić każdy bra- i ket- wektor w nowej bazie. b) Wykorzystując (A.27) przekonać się, ze wyniki pokrywają się.
44
A.7 Operatory samosprzężone i samosprzężone. Działanie operatora A^ na wektor ket | c > odpowiada pomnożeniu macierzy kwadratowej A^ przez kolumnę, określającą | c >. Wynikiem tej operacji jest nowa kolumna A^ | c > Rozpatrzmy analogicznie operację, w której przez wiersz, odpowiadający wektorowi bra < b |, jest mnożona prawostronnie macierz kwadratowa A^. W wyniku tego otrzymujemy nowy wiersz, odpowiadający jakiemuś wektorowi bra. Możemy związać tę operację z działaniem operatora A^ na < b | prawostronnie, co w notacji Diraca oznaczamy jako < b | A^. Formalna definicja danej operacji ma postać : < b | A^ ≡ Σ bi* A ij < vj | (A.29)
i,j gdzie Aij i bj – są odpowiednio, elementami macierzowymi A^ i | b > w bazie ortounormowanej { | vi > }.
Ćwiczenie A.52 Wyprowadzić następujące własności operacji, określonej przez równanie (A.29) : a) A^, działający z prawej, jest operatorem liniowym w przestrzeni sprzężonej. b) < a | b > < c | = < a | ( | b > < c | ) c) dla wektorów | a > i | c > : ( < a | A^ ) | c > = < a | ( A^ | c > ) (A.30) d) wektor < a | A^, określony przez (A.29), nie zależy od bazy, w której obliczana jest macierz ( Aij ).
Teraz rozpatrzmy następujące zagadnienie. Założymy, że mamy operator A^, odwzorowujący wektor ket | a > na wektor ket | b > : A^ | a > = | b >
Czemu jest równy operator A^†, który działając z prawej odwzorowuje wektor bra < a | na wektor bra < b | :
< a | A †̂ = < b | Okazuje się, że ten operator nie pokrywa się z A^, ale w prosty sposób może być do niego sprowadzony.
Definicja A.21 Operator A†̂ ( A- dagger ) nazywa się operatorem sprzężonym hermitowsko z operatorem A^, jeśli dla dowolnego wektora | a > :
< a | A †̂ = sprzężony( A^ | a > ) (A.31)
Jeśli A^ = A^† , to operator A^ nazywa się operatorem hermitowskim. W odróżnieniu od wektorów bra- i ket, operatory i ich sprzężenie żyją w jednej i tej samej przestrzeni Hilberta. Ściślej – żyją one zarówno w przestrzeni bra, jak i ket – działając na wektory bra z prawej, a na wektor ket – z lewej. Jednakże należy zwrócić uwagę, ze operator nie może działać na wektor bra z lewej lub na wektor ket – z prawej.
Ćwiczenie A.53 Pokazać, że macierz A†̂ związana jest z macierzą A^ poprzez operację transponowania i sprzężenia zespolonego. Ćwiczenie A.54 Pokazać, że dla dowolnego operatora :
( A^† )† = A^ Ćwiczenie A.55 Pokazać, że operatory Pauliego (1.7) są hermitowskie. Ćwiczenie A.56 Wykorzystując kontrprzykład, pokazać, że jeśli dwa operatory są hermitowskie, to nie jest gwarantowane, że ich iloczyn również będzie hermitowski. Ćwiczenie A.57. Pokazać, że :
( | c > < b | )† = | b > < c | (A.32) Dane ćwiczenie może naprowadzić nas na myśl, ze operator sprzężony z danym operatorem, jest do niego odwrotnym : jeśli „bezpośredni” operator odwzorowuje | b > na | c >, to operator sprzężony do niego daje odwzorowanie odwrotne. Ale nie jest tak zawsze : jak nam wiadomo z definicji iloczynu zewnętrznego (A.20), operator | b > < c |, działając z lewej, odwzorowuje „wszystko” ( nie tylko | c > ) na | b >, podczas, gdy | c > < b | odwzorowuje „wszystko” na | c >. Jednakże istnieje ważna klasa operatorów (tzw. operatory unitarne ), dla których „odwrotny” rzeczywiście oznacza, to że i sprzężony. Takie operatory omówimy w podrozdziale A.10.
45
Ćwiczenie A.58 Pokazać, że :
Można powiedzieć, że dla każdego obiektu w algebrze liniowej istnieje obiekt do niego sprzężony. Dla liczby, jest to liczba zespolona z nią zespolenie, dla wektora ket – jest to wektor bra (i na odwrót ), dla operatora – operator sprzężony z nim. Macierze obiektu i jego sprzężenia są związane za pośrednictwem transponowania i sprzężenia zespolonego. Załóżmy, że zadane mamy złożone wyrażenie, składające się z wektorów i operatorów i musimy znaleźć wyrażenie sprzężone do niego. Podsumowując (A.12), (A.32) i (A.35), otrzymamy następujący algorytm : a) zmienić porządek wszystkich iloczynów na odwrotny. b) zamienić wszystkie liczby na liczby sprzężone zespolenie. c) zamienić wszystkie kety na bra i na odwrót. d) zamienić wszystkie operatory na operatory do nich sprzężone. Przykładowo :
sprzężenie( λA^B^ | a > < b | C^ ) = λ* C^† | b > < a | B†̂ A^† (A.36) Zasadę tę można wykorzystać w celu otrzymania następującej zależności : Ćwiczenie A.59. Pokazać, że :
< ϕ | A^ | ψ > = < ψ | A^† | ψ >* (A.37) A. 8 Rozkład spektralny. Teraz dowiedziemy ważnego twierdzenia dla operatorów hermitowskich. Przyjmę przy tym, że czytelnik zna pojęcia wyznacznika, wartości własnej ( eigenvalue) i wektora własnego ( eigenvector ) macierzy, jak również z metodami ich znajdowania. Jeśli nie, to proponuje zajrzeć do odpowiedniej książki z algebry liniowej. Ćwiczenie A60* Dowieść następującego twierdzenia spektralnego : dla dowolnego operatora hermitowskiego V^ istnieje baza ortounormowana { | vi > } ( będziemy ją nazywali jego bazą własną ), taka , że :
V^ = Σ vi | vi > < vi | (A.38)
i gdzie wszystkie vi są rzeczywiste.
Reprezentacja operatora w postaci (A.38) nazywa się rozkładem spektralnym lub diagonalizacją (sprowadzenie operatora do postaci diagonalnej ). Ćwiczenie A.61 Zapisać macierz operatora (A.38) w jego bazie własnej. Ćwiczenie A.62 Pokazać, że elementy bazy własnej operatora V^ ( w sensie ćwiczenia A.60) reprezentują sobą wektory własne V^, a odpowiednie wielkości vi – jego wartości własne, tj. dla dowolnego i :
V^ | vi > = vi | vi >
Ćwiczenie A.63* (trudne ) Pokazać, że rozkład spektralny ( nie koniecznie o rzeczywistych wartościach własnych )
istnieje dla dowolnego operatora V^, takiego, że V^V^† = V^†V^ ( takie operatory nazywają się operatorami normalnymi ) Ćwiczenie A.64 Znaleźć wartości własne i bazę własną operatora, związanego z obrotem na płaszczyźnie dwuwymiarowych wektorów geometrycznych o kąt ϕ ( zobacz ćwiczenie A.41 ), ale teraz nad ciałem liczb zespolonych.

46
Ćwiczenie A.65 (trudne) W trójwymiarowej przestrzeni Hilberta trzy operatory mają następujące macierze w bazie ortogonalnej { | v1 >, | v2 >, | v3 >} :
Pokazać, że takie operatory są hermitowskie. Znaleźć ich wartości własne i wektory własne. W ten sposób upewniliśmy się, że każdy operator hermitowski posiada rozkład spektralny. Pytanie – czy taki rozkład konkretnego operatora jest jednoznaczny ? Odpowiedź jest pozytywna przy warunku, że taki operator nie posiada zdegenerowanych wartości własnych tj. wartości własnych, związanych z dwoma lub więcej wektorami własnymi. Ćwiczenie A.66 Operator hermitowski V^ może być sprowadzony do postaci diagonalnej w bazie ortounormowanej { | vi >}. Załóżmy, że istnieje wektor | ψ >, który jest wektorem własnym V^ o wartości własnej v, ale nie
proporcjonalnej do żadnego { | vi >}.
Pokazać, że jest to możliwe tylko jeśli v jest zdegenerowaną wartością własną V^, a | ψ > reprezentuje sobą kombinacje liniową elementów { | vi >}, odpowiadających tej wartości własnej.
Ćwiczenie A.67 Pokazać, że dla operatora hermitowskiego V^ którego wartości własne są nie zdegenerowane : a) baza własna jest jednoznaczna z dokładnością do czynników fazowych. b) Dowolny zbiór, zawierający wszystkie liniowo niezależne unormowane wektory własne operatora V^, jest identyczny z bazą własną V^ z dokładnością do czynników fazowych. Ostatni wynik ma pierwszorzędne znaczenie i będziemy go szeroko wykorzystywali w całej książce. Może on być uogólniony na przestrzenie Hilberta o nieskończonym wymiarze, a nawet na przestrzenie , związane z obserwablami ciągłymi. Dalej rozpatrzymy przypadek operatorów o zdegenerowanych wartościach własnych. Ćwiczenie A.68 Znaleźć wartości własne operatora tożsamościowego i pokazać, że są one zdegenerowane. Podać dwa różne przykłady bazy własnej takiego operatora w dwuwymiarowej przestrzeni Hilberta. Ćwiczenie A.69 Pokazać, że wektory własne operatora hermitowskiego V^, związane z różnymi wartościami własnymi, są ortogonalne. Nie stosować założenia o zdegenerowaniu wartości własnych. Ćwiczenie A.70 Załóżmy, że wartość własna v operatora V^ jest zdegenerowana. Pokazać, że zbiór odpowiadających mu wektorów własnych tworzy przestrzeń liniową (zobacz definicja A.8 ) Ćwiczenie A.71* a) Pokazać, że jeśli < ψ | A^ | α > = < ψ | B^ | ψ > dla wszystkich | ψ >, to A^ = B^. b) Pokazać, że jeśli < ψ | A^ | ψ > - jest liczbą rzeczywistą dla wszystkich | ψ >, to A^ jest operatorem hermitowskim. Definicja A.22 Mówimy, że operator hermitowski A^ jest dodatni (nieujemny), jeśli : < ψ| A^ ψ > > 0 ( < ψ | A^ | ψ > ≥ 0 ) dla dowolnego niezerowego wektora | ψ >. Ćwiczenie A.72. Pokazać, że operator hermitowski A^ jest dodatni (nieujemny ), jeśli i tylko jeśli wszystkie jego wartości własne są dodatnie ( nieujemne ). Ćwiczenie A.73 Pokazać, że suma A^ + B^ dwóch dodatnich (nieujemnych ) operatorów jest dodatnia (nieujemna ).
47
A.9 Komutatory. Jak już mówiliśmy, nie wszystkie operatory komutują. Stopień ich niekomutowania ilościowo wyraża operator zwany komutatorem. Definicja A.23 Dla dowolnych dwóch operatorów A^, B^ komutator i antykomutator definiuje się poprzez następujące wyrażenia :
Ćwiczenie A.74 Pokazać, że :
Przy obliczaniu komutatorów dla złożonych wyrażeń rekomenduje się wykorzystywać zależności, wyprowadzonych w powyższym ćwiczeniu, a nie definicja (A.39a). W danej książce podano wiele przykładów tego faktu, że obliczenia tak właśnie prowadzone stają się dużo prostsze. Ćwiczenie A.75 Wyrazić komutatory : a) [ A^B^C^, D^ ]
b) [ A^2 + B^2 , A^ + iB^ ] poprzez komutatory operatorów A^, B^, C^, D^. Ćwiczenie A.76 Dla dwóch operatorów A^, B^ załóżmy, że : [ A^, B^ ] = c1^ , gdzie c – pewna liczba zespolona. Pokazać, że :
[ A^ , B^n ] = nc B n̂−1 (A.46) Ćwiczenie A.77 Pokazać, że jeśli A^, B^ są operatorami hermitowskimi, to hermitowskie są również : a) i [ A^, B^ ] b) { A^ , B^ }
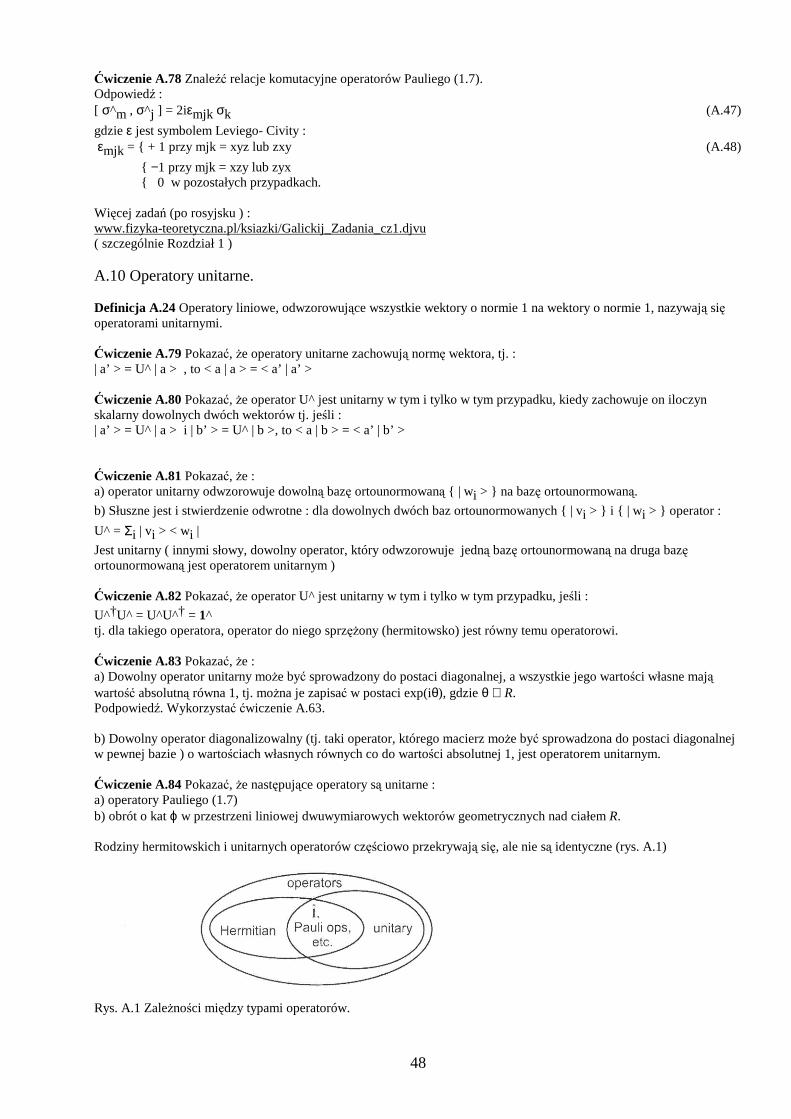
48
Ćwiczenie A.78 Znaleźć relacje komutacyjne operatorów Pauliego (1.7). Odpowiedź : [ σ^m , σ^j ] = 2iεmjk σk (A.47)
gdzie ε jest symbolem Leviego- Civity : εmjk = { + 1 przy mjk = xyz lub zxy (A.48)
{ −1 przy mjk = xzy lub zyx { 0 w pozostałych przypadkach. Więcej zadań (po rosyjsku ) : www.fizyka-teoretyczna.pl/ksiazki/Galickij_Zadania_cz1.djvu ( szczególnie Rozdział 1 ) A.10 Operatory unitarne. Definicja A.24 Operatory liniowe, odwzorowujące wszystkie wektory o normie 1 na wektory o normie 1, nazywają się operatorami unitarnymi. Ćwiczenie A.79 Pokazać, że operatory unitarne zachowują normę wektora, tj. : | a’ > = U^ | a > , to < a | a > = < a’ | a’ > Ćwiczenie A.80 Pokazać, że operator U^ jest unitarny w tym i tylko w tym przypadku, kiedy zachowuje on iloczyn skalarny dowolnych dwóch wektorów tj. jeśli : | a’ > = U^ | a > i | b’ > = U^ | b >, to < a | b > = < a’ | b’ > Ćwiczenie A.81 Pokazać, że : a) operator unitarny odwzorowuje dowolną bazę ortounormowaną { | wi > } na bazę ortounormowaną.
b) Słuszne jest i stwierdzenie odwrotne : dla dowolnych dwóch baz ortounormowanych { | vi > } i { | wi > } operator :
U^ = Σi | vi > < wi |
Jest unitarny ( innymi słowy, dowolny operator, który odwzorowuje jedną bazę ortounormowaną na druga bazę ortounormowaną jest operatorem unitarnym ) Ćwiczenie A.82 Pokazać, że operator U^ jest unitarny w tym i tylko w tym przypadku, jeśli :
U^†U^ = U^U^† = 1^ tj. dla takiego operatora, operator do niego sprzężony (hermitowsko) jest równy temu operatorowi. Ćwiczenie A.83 Pokazać, że : a) Dowolny operator unitarny może być sprowadzony do postaci diagonalnej, a wszystkie jego wartości własne mają wartość absolutną równa 1, tj. można je zapisać w postaci exp(iθ), gdzie θ ∈ R. Podpowiedź. Wykorzystać ćwiczenie A.63. b) Dowolny operator diagonalizowalny (tj. taki operator, którego macierz może być sprowadzona do postaci diagonalnej w pewnej bazie ) o wartościach własnych równych co do wartości absolutnej 1, jest operatorem unitarnym. Ćwiczenie A.84 Pokazać, że następujące operatory są unitarne : a) operatory Pauliego (1.7) b) obrót o kat ϕ w przestrzeni liniowej dwuwymiarowych wektorów geometrycznych nad ciałem R. Rodziny hermitowskich i unitarnych operatorów częściowo przekrywają się, ale nie są identyczne (rys. A.1)
Rys. A.1 Zależności między typami operatorów.

49
Operator, który jest jednocześnie hermitowski i unitarny, powinien być odwrotny sam do siebie, jak pokazano w ćwiczeniu A.82. Takie operatory zdarzają się stosunkowo rzadko. A.11 Funkcje operatorów. Koncepcja funkcji operatorów posiada cały szereg zastosowań w algebrze liniowej i równaniach różniczkowych. Jest ona dogodna również w MQ, ponieważ pozwala łatwo wyprowadzać operatory ewolucji. Definicja A.25 Rozpatrzmy funkcję zespoloną f(x), określona na C. Funkcją f(A^) operatora diagonalizowalnego A^ nazywamy następujący operator : f(A^ ) = Σi f(ai ) | ai > < ai | (A.49)
gdzie { | ai > } jest baza ortounormowaną, w której A^ przyjmuje postać diagonalną :
A^ = Σi ai | ai > < ai |
Ćwiczenie A.85 Pokazać, że jeśli wektor | a > jest wektorem własnym operatora hermitowskiego A^ o wartości własnej a, to : f(A^ ) | a > = f(a) | a > Ćwiczenie A.86 Załóżmy, że operator A^ jest hermitowski i funkcja f(x), stosowana do dowolnego argumentu rzeczywistego x, przyjmuje wartość rzeczywistą. Pokazać, że f(A^ ) – jest również operatorem hermitowskim. Ćwiczenie A.87 Załóżmy, ze operator A^ jest hermitowski i funkcja f(x) stosowana do dowolnego argumentu rzeczywistego x, przyjmuje wartość nieujemną. Pokazać, że f(A^ ) – jest również operatorem nieujemnym. (zobacz definicja A.22 ) Ćwiczenie A.88 Znaleźć macierze √A^ i ln A^ w bazie ortonormalnej, w której :
Ćwiczenie A.89 Znaleźć macierz exp(iθA^ ) , gdzie A^ = ½ ( 1 1 ) ( 1 1 ) Podpowiedź. Jedna z wartości własnych A^ jest równa 0, a to oznacza, że odpowiedni wektor własny nie pojawia się w rozkładzie spektralnym (A.50) operatora A^. Jednakże eksponenta tej wartości własnej nie jest równa zero i odpowiadające jej wektory własne cały czas są obecne w funkcji operatorowej (A.49). Ćwiczenie A.90 Pokazać, że dla dowolnego operatora A^ i funkcji f spełnione jest : [A^, f(A^ ) ] = 0
Ćwiczenie A.91 Załóżmy, że f(x) posiada rozkład w szereg Taylora f(x) = f0 + f1x + f2x2 + ...
Pokazać, że f(A^ ) = f01^ + f1A^ + f2 A^2 + ...
Ćwiczenie A.93 Niech s→ = ( sx, sy , sz ) jest wektorem jednostkowym tj. wektorem o długości 1.
Pokazać, że :
exp(iθs→σ^→ ) = cos(θ) 1^ + i sin(θs→ • σ^→ ) (A.51)
gdzie σ^→ = ( σ^x , σ^y , σ^z ) ; s→ • σ^→ = sx σ^x + sy σ^y + sz σ^z
Podpowiedź. Nie ma konieczności znajdowania jawnego rozwiązania dla wektorów własnych operatora s→ • σ^→ Ćwiczenie A.94 (trudne) Znaleźć macierze operatorów exp(iθσ^x ), exp(iθσ^y ), exp(iθσ^z ) w bazie kanonicznej.
50
Odpowiedź :
Definicja A.26 Załóżmy, ze wektor | ψ(t) > zależny jest od pewnego parametru t. Pochodna | ψ(t) > względem parametru t jest definiowana jako wektor :
W analogiczny sposób, pochodna operatora Y^(t) względem t jest operatorem :
Ćwiczenie A.95 Załóżmy, że macierzowa postać wektora | ψ(t) > w pewnej bazie jest taka :
Pokazać, że :
Zapisać wyrażenie dla postaci macierzowej pochodnej operatora. Ćwiczenie A.96 Załóżmy, ze operator A^ może być zdiagonalizowany w bazie ortonormalnej i nie zależy on od t, gdzie t – parametr rzeczywisty. Pokazać, że : d/dt exp(iA^t ) = iA^ exp(iA^t ) = i exp(iA^t )A^ Ćwiczenia A.97*. Dla dwóch operatorów A^, B^ załóżmy, że : [A^, B^ ] = c1^ gdzie c – liczba zespolona. Dowieść wzoru Bakera –Campbella- Hausdorffa : exp(A^ + B^ ) = exp(A^ ) exp(B^) exp( − ½ c ) = exp(B^) exp(A^) exp( ½c) (A.54) ( jest to uproszczona postać wzoru Bakera –Campbella- Hausdorffa. Pełna postać tego wzoru jest bardziej złożona i jest spełniona również dla przypadku, kiedy [ A^, B^ ] nie komutuje z A^ lub B^ ) z wykorzystaniem kolejnych kroków : a) Pokazać, że : [ A^, exp(B^ ) ] = c exp(B^ ) (A.55) Podpowiedź. Wykorzystać rozkład w szereg Taylora dla eksponenty, oraz (A.46). b) Dla dowolnej liczby λ i operatora G^(λ) = exp(λA^) exp(λB^) pokazać, że : dG^(λ)/dλ = G^(λ) ( A^ + B^ + λc ) (A.56) c) Rozwiązać równanie różniczkowe (A.56) i pokazać, że :
G^(λ) = exp( λA^ + λB^ + ½ λ2c ) (A.57) d) Dowieść wzoru Bakera –Campbella- Hausdorffa, wykorzystując (A.57). ________________________________________________________________________________________________
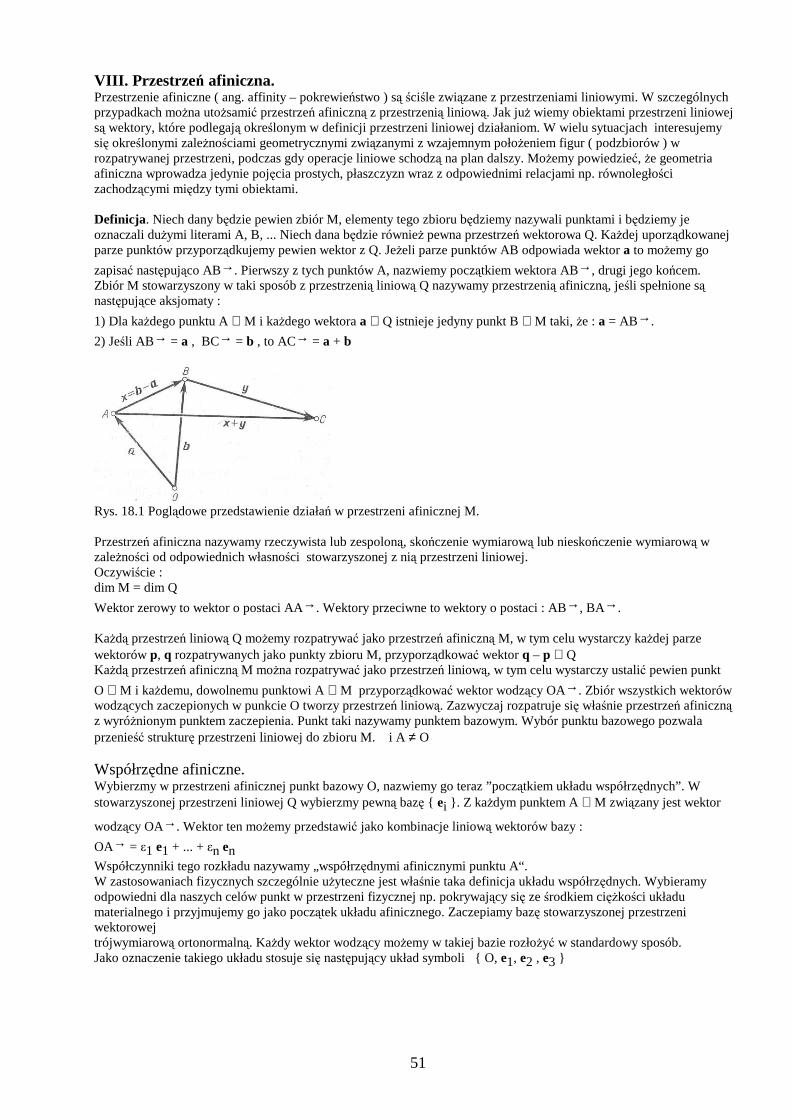
51
VIII. Przestrzeń afiniczna. Przestrzenie afiniczne ( ang. affinity – pokrewieństwo ) są ściśle związane z przestrzeniami liniowymi. W szczególnych przypadkach można utożsamić przestrzeń afiniczną z przestrzenią liniową. Jak już wiemy obiektami przestrzeni liniowej są wektory, które podlegają określonym w definicji przestrzeni liniowej działaniom. W wielu sytuacjach interesujemy się określonymi zależnościami geometrycznymi związanymi z wzajemnym położeniem figur ( podzbiorów ) w rozpatrywanej przestrzeni, podczas gdy operacje liniowe schodzą na plan dalszy. Możemy powiedzieć, że geometria afiniczna wprowadza jedynie pojęcia prostych, płaszczyzn wraz z odpowiednimi relacjami np. równoległości zachodzącymi między tymi obiektami. Definicja. Niech dany będzie pewien zbiór M, elementy tego zbioru będziemy nazywali punktami i będziemy je oznaczali dużymi literami A, B, ... Niech dana będzie również pewna przestrzeń wektorowa Q. Każdej uporządkowanej parze punktów przyporządkujemy pewien wektor z Q. Jeżeli parze punktów AB odpowiada wektor a to możemy go
zapisać następująco AB→. Pierwszy z tych punktów A, nazwiemy początkiem wektora AB→, drugi jego końcem. Zbiór M stowarzyszony w taki sposób z przestrzenią liniową Q nazywamy przestrzenią afiniczną, jeśli spełnione są następujące aksjomaty :
1) Dla każdego punktu A ∈ M i każdego wektora a ∈ Q istnieje jedyny punkt B ∈ M taki, że : a = AB→.
2) Jeśli AB → = a , BC→ = b , to AC→ = a + b
Rys. 18.1 Poglądowe przedstawienie działań w przestrzeni afinicznej M. Przestrzeń afiniczna nazywamy rzeczywista lub zespoloną, skończenie wymiarową lub nieskończenie wymiarową w zależności od odpowiednich własności stowarzyszonej z nią przestrzeni liniowej. Oczywiście : dim M = dim Q
Wektor zerowy to wektor o postaci AA→. Wektory przeciwne to wektory o postaci : AB→, BA→. Każdą przestrzeń liniową Q możemy rozpatrywać jako przestrzeń afiniczną M, w tym celu wystarczy każdej parze wektorów p, q rozpatrywanych jako punkty zbioru M, przyporządkować wektor q – p ∈ Q Każdą przestrzeń afiniczną M można rozpatrywać jako przestrzeń liniową, w tym celu wystarczy ustalić pewien punkt
O ∈ M i każdemu, dowolnemu punktowi A ∈ M przyporządkować wektor wodzący OA→. Zbiór wszystkich wektorów wodzących zaczepionych w punkcie O tworzy przestrzeń liniową. Zazwyczaj rozpatruje się właśnie przestrzeń afiniczną z wyróżnionym punktem zaczepienia. Punkt taki nazywamy punktem bazowym. Wybór punktu bazowego pozwala przenieść strukturę przestrzeni liniowej do zbioru M. i A ≠ O Współrzędne afiniczne. Wybierzmy w przestrzeni afinicznej punkt bazowy O, nazwiemy go teraz ”początkiem układu współrzędnych”. W stowarzyszonej przestrzeni liniowej Q wybierzmy pewną bazę { ei }. Z każdym punktem A ∈ M związany jest wektor
wodzący OA→. Wektor ten możemy przedstawić jako kombinacje liniową wektorów bazy :
OA→ = ε1 e1 + ... + εn en
Współczynniki tego rozkładu nazywamy „współrzędnymi afinicznymi punktu A“. W zastosowaniach fizycznych szczególnie użyteczne jest właśnie taka definicja układu współrzędnych. Wybieramy odpowiedni dla naszych celów punkt w przestrzeni fizycznej np. pokrywający się ze środkiem ciężkości układu materialnego i przyjmujemy go jako początek układu afinicznego. Zaczepiamy bazę stowarzyszonej przestrzeni wektorowej trójwymiarową ortonormalną. Każdy wektor wodzący możemy w takiej bazie rozłożyć w standardowy sposób. Jako oznaczenie takiego układu stosuje się następujący układ symboli { O, e1, e2 , e3 }
52
Linie proste i płaszczyzny w przestrzeni afinicznej. Definicja. Niech Mn będzie n-wymiarową przestrzenią afiniczną, A nich będzie dowolnym punktem do niej należącym.
Niech w przestrzeni stowarzyszonej Qn będzie określona pewna jej podprzestrzeń Q’r . Zbiór wszystkich punktów B
przestrzeni Mn dla których AB→ ∈ Q’r nazywamy „płaszczyzną r-wymiarową przechodzącą przez dany punkt A w
kierunku podprzestrzeni Q’r . Przypadki szczególne. a) r = 0 – płaszczyzna składa się z jednego punktu A. Każdy punkt przestrzeni afinicznej można rozpatrywać jako płaszczyznę zero wymiarową. b) r =1 - płaszczyznę jednowymiarową nazywamy w tym przypadku „linią prostą”. c) r = n – 1 - płaszczyznę w tym przypadku nazywamy „hiperpłaszczyzną“ _______________________________________________________________________________________________ Definicja. Niech V – będzie przestrzenią wektorową. Mówimy, że zbiór A jest przestrzenią afiniczną, stowarzyszoną z V, jeśli istnieje odpowiedniość między dowolną uporządkowaną parą elementów A, B ∈ A , nazywanych punktami i
wektorem oznaczanym symbolem AB→ , tak że : 10) (uzupełniamy aksjomaty przestrzeni wektorowej ) Ala dowolnego punktu A, nazywanego punktem początkowym i dowolnego wektora a, istnieje taki punkt B, który nazywamy punktem końcowym, że :
AB→ = a 11) Dla dowolnych punktów A, B, C spełniona jest równość trójkąta :
AB→ + BC→ = AC→
Jeśli A = B = C, to równanie trójkąta przyjmuje postać AA→ = 0.
Jeśli A = C, to AB→ = − BA→ Poglądowy sens aksjomatu 10 polega na tym, że z dowolnego punktu przestrzeni afinicznej A można wyprowadzić dowolny wektor i to doprowadzi na do punktu, również należącego do A Aksjomat 11 wyjaśnia jakie konstrukcje punktowe przestrzeni afinicznej są przyporządkowywane wektorowi zerowemu, oraz wektorowi odwrotnemu do danego wektora. Wymiar przestrzeni afinicznej A, stowarzyszonej z Vn, jest równy n.
Przestrzeń afiniczną jest dogodna dla analizy najprostszych obiektów geometrii, np. punktów, prostych, płaszczyzn, jak również konstrukcji z nich złożonych. Fundamentalnym pojęciem w A jest afiniczny układ współrzędnych.
Definicja. Niech O – będzie pewnym ustalonym punktem w A. Każdemu punktowi A odpowiada wektor OA→, nazywany wektorem wodzącym punktu A. Niech e1, … , en będzie bazą stowarzyszonej przestrzeni wektorowej Vn.
Współrzędne wektora wodzącego OA→ w tej bazie a1, ... , an nazwiemy afinicznymi współrzędnymi punktu A. Afiniczny układ współrzędnych zawiera wiec bazę e1, … , en i punkt O – początek współrzędnych.
Ponieważ OB→ = OA→ + AB→, to wektor AB→ posiada współrzędne :
b1− a1, .. , bn − an To pozwala zrozumieć, że A jest izomorficzna Rn , gdzie ( 0, ... , 0 ) odgrywa role początku współrzędnych, a
współrzędne afiniczne punktu dane są przez współrzędne wektora wodzącego tego punktu. Aksjomaty 1) − 11) tworzą formalną podstawę geometrii afinicznej. Zmiana afinicznego układu współrzędnych pociąga za sobą przekształcenie współrzędnych afinicznych :
a’i = Mij a
j + ci (1.60)
gdzie pierwszy człon jest związany ze zmianą wyboru bazy, a drugi – z przesunięciem początku współrzędnych. Na koniec, omówimy geometrię euklidesową. Ta geometria jest otrzymywana jako wynik wyposażenia przestrzeni afinicznej w strukturę metryczną.
53
Definicja. Dla dowolnych wektorów a, b zdefiniujemy iloczyn skalarny jako biliniowy, niezdegenerowany symetryczny funkcjonał g(a, b ) : 12) g(a, κb + λc ) = κ g(a, b ) + λ g(a, c ) 13) g(a, b ) = g(b, a ) 14) Dla dowolnego niezerowego wektora a można znaleźć wektor b, taki że g(a, b ) ≠ 0.
Można również wymagać, aby norma każdego niezerowego wektora a2 = g(a, a ) była dodatnia.
15) a2 > 0. W literaturze fizycznej dla iloczynu skalarnego g(a, b ) zazwyczaj wykorzystuje się oznaczenie a • b. Przestrzeń wektorowa V z konkretnie zdefiniowanym iloczynem skalarnym, który spełnia aksjomaty 12) − 15), nazywa się euklidesową przestrzenią wektorową En.
Jeśli odejdziemy od aksjomatu 15), to norma stanie się indefinitna. Wtedy aksjomaty 1) − 14) będą określały geometrię pseudoeuklidesową przestrzeni wektorowej. Wektory a i b nazywają się ortogonalnymi, jeśli : a • b = 0 Dla wektorów ortogonalnych a, b otrzymujemy : (a − b )2 = a2 + b2 (1.61) Jeśli przestrzeń afiniczna stowarzyszona jest z pewną euklidesową przestrzenią wektorową, to nazywa się ona euklidesową przestrzenią afiniczną. Pojęcia „równoległy” i „prostopadły” wykorzystuje się tutaj jako synonimy pojęć „kolinearny” i „ortogonalny”
Norma wektora AB→ jest rozumiana jako kwadrat odległości między punktami A i B.
Niech a = OA→ będzie prostopadły do b = OB→. Ponieważ a − b = AB→, to równość (1.61) okazuje się być twierdzeniem Pitagorasa :
AB→2 = OA→2 + OB→2 (1.62) W bazie e1, … , en iloczyn skalarny można zapisać w postaci :
g(a, b ) = gij ai bj (1.63)
gdzie gij = g(ei, ej ) = ei • ej (1.64)
Na mocy aksjomatu 13) : gij = gji (1.65)
Zgodnie z aksjomatem 14) w En nie istnieje niezerowy wektor a ortogonalny do wszystkich wektorów.
Zobaczmy co oznacza odejście od tego wymogu. Niech wektor a będzie ortogonalny do dowolnego wektora b :
gij ai bj = 0 (1.66)
Wtedy, na mocy dowolności bj współczynnik przy bj jest równy zero dla każdego j :
gij ai = 0 (1.67)
Nietrywialne rozwiązanie tego równania jest możliwe tylko przy warunku : det (gij ) = 0 (1.68)
Zatem, aksjomat 14) może być wyrażony w postaci : det (gij ) ≠ 0 (1.69)
a (1.69) oznacza, że istnieje macierz odwrotna do gij :
gij gjk = δk
i (1.70)
Przy pomocy gij i gij wektory można przekształcać w kowektory i na odwrót :
ai = gij aj , ai = gij aj (1.71)
Jeśli indeks kowektora ai zostanie podniesiony z pomocą gij , a indeks tak otrzymanego wektora ai zostanie opuszczony
z pomocą gij , tak jak to pokazano w (1.17), to powrócimy do wejściowego wektora ai.
54
Niech aj będą współrzędnymi wektora a. Wtedy współrzędne ai otrzymanego z aj można interpretować jako iloczyn
skalarny wektora a i i –tego wektora bazowego ei :
ai = gij aj = ( ei • ej ) a
j = ei • (aj ej ) = ei • a (1.72)
Dla wektorów i kowektorów w En dogodnie jest przyjąć bardziej swobodną terminologię i nazywać obie te wielkości, po
prostu wektorami.
Wielkości ai i ai będziemy przy tym rozumieli jako współrzędne odpowiednio kontra- (indeks górny ) i ko- (indeks
dolny ) wariantne, jednego obiektu geometrycznego a. W En dogodniej jest pracować z tzw. baza ortounormowaną, skał dającą się z jednostkowych, wektorów wzajemnie
ortogonalnych :
ei2 = 1, ei • ej = 0 ; i ≠ j (1.73)
Równości te można krótko zapisać w postaci : ei • ej = δij , gdzie δij – symbol Kroncekera (1.74)
Niech f1, ... , fn – będzie dowolną bazą w przestrzeni Euklidesa En. Zbudujemy z niej bazę ortounormowaną e1, ... , en .
Rozpoczniemy od tego, że f1 możemy unormować, tj. przekształcić w wektor jednostkowy :
e1 = f1 / √ f12 (1.75)
W ten sposób otrzymaliśmy pierwszy wektor poszukiwanej bazy e1 , ponieważ e12 = 1.
Wektor f2 przedstawimy w postaci sumy dwóch wektorów, jeden z których :
( e1 • f2 ) e1 (1.76)
jest równoległy do e1, a drugi :
f2 − ( e1 • f2 ) e1 (1.77)
jest prostopadły do e1.
Jeśli z wektora f2 wyeliminujemy składową ( e1 • f2 ) e1, to otrzymamy wektor prostopadły do e1.
Należy go unormować, co da nam wektor nowej bazy e2. Jest on wektorem jednostkowym, prostopadłym do wektora e1.
Z dowolnego wektora x można zbudować wektor x⊥ prostopadły do niezerowego wektora a, przy pomocy wzoru :
x⊥ = x − ( x • a / a2 ) a (1.78)
Wprowadzając wektor ⊥a, działający na współrzędne x następująco :
( ⊥a x )i = xi − ( aj xj /a2 ) ai = ( gij − ai aj / a
2 )xj (1.79)
przedstawimy wzór (1.78) w postaci :
x⊥ = ⊥a x (1.80)
Z uwzględnieniem tego faktu kontynuujemy proces budowy bazy. Z f3 zbudujemy wektor :
⊥e1 ⊥e2 f 3 (1.81)
i unormujemy go. Otrzymujemy jeszcze jeden wektor nowej bazy e3 ortogonalny do wektorów e1 i e2.
Itd. Do zakończenia procesu ortonormalizacji. Wektory tak otrzymanej bazy e1, ... , en nazywamy ortami (wersorami ).
Dogodność bazy ortounormowanej jest istotna. Jak widać z (1.74) gij = δij . To oznacza, że w bazie ortounormowanej
metryka dana jest przez macierz jednostkową n × n – macierz. Kowariantne i kontrawariantne współrzędne dowolnego wektora okazują się równe co do wielkości :
ai = gij aj = δij a
j = ai (1.82)
Iloczyn skalarny przyjmuje postać “diagonalną” :
( a • b ) = δij ai bj = a1b1 + … + anbn (1.83)
w szczególności :
a2 = a12 + ... + an
2 (1.84)

55
Budowa bazy ortounormowanej w euklidesowej przestrzeni afinicznej pozwala zbudować w niej kartezjański układ współrzędnych. Teraz rozpatrzmy alternatywny sposób definicji geometrii euklidesowej. Obecność struktury metrycznej w En oznacza, że grupa automorfizmów tej przestrzeni jest obcięciem GL(n, R) – grupy
wszystkich automorfizmów dowolnej n – wymiarowej przestrzeni wektorowej. Jak jest grupa automorfizmów euklidesowej przestrzeni afinicznej ? W pierwszej kolejności zauważmy, że zawarta jest w niej, w charakterze podgrupy grupa przesunięć ( grupa translacji ) Tn
W istocie – konstrukcja gij ( xi − yi )( xj − yj ) jest inwariantna ze względu na translację początku współrzędnych O, w
wyniku której współrzędne dowolnego wektora zostają przemieszczone o pewien ustalony odcinek : xj → x’j = xj + łj
Przyjmijmy jako dany początek współrzędnych w punkcie O. Rozpatrzmy przekształcenia jednej bazy ortounormowanej w drugą bazę ortounormowaną. Takie przekształcenie bazy pociąga za sobą przekształcenie współrzędnych wektorów :
a’i = Lji aj (1.85)
przy tym norma powinna pozostać niezmieniona :
a’ia’j δij = Lki L
łj δij ak ał = ai aj δij (1.86)
Stąd :
Lki L
łj δij = δkł (1.87)
Przyjmijmy umowę, że lewe indeksy numerują wiersze, a prawe – kolumny. Z uwzględnieniem takiej umowy z (1.87) znajdujemy, że macierz odwrotna do L, może być otrzymana poprzez prostą transpozycję L :
L−1 = LT (1.88) Macierze, spełniające warunek (1.88), tworzą grupę ciągłą. Aby się o tym przekonać, na początku zauważymy :
( L1 L2 )−1 = L12 L2
−1 = L2T L1
T = (L1L2 )T (1.89)
Równanie (1.89) pokazuje, że złożenie macierzy, spełniających warunek (1.88) również jest macierzą, spełniającą taki warunek. Obecność w takim zbiorze macierzy jednostkowej jest oczywista. Zatem, dochodzimy do ½ ( n − 1) n – parametrycznej grupie Liego, którą nazywa się grupą ortogonalną O(n). Wiele jej ważnych własności można znaleźć w dodatku C. Przekształcenia ortogonalne charakteryzują się zależnością
LLT = 1. Jak wiadomo, wyznacznik iloczynu macierzy jest równy iloczynowi wyznaczników, a wyznacznik nie zmienia się przy operacji transponowania macierzy. Dlatego, obliczając wyznacznik tej zależności, znajdujemy :
( det L )2 = 1 (1.90) Wszystkie przekształcenia ortogonalne, które można otrzymać z przekształcenia tożsamościowego poprzez ciągłą zmianę parametrów, posiadają wyznacznik równy 1. Takie przekształcenia nazywają się obrotami. Zbiór obrotów tworzy podgrupę SO(n) grupy O(n). Wszystkie przekształcenia o wyznaczniku równym −1, reprezentują sobą kompozycję obrotów i odbić : ei → − ei (1.91)
Jak widzimy grupa automorfizmów euklidesowej przestrzeni afinicznej zawiera w sobie przekształcenia ortogonalne i translacje. Wprowadzenie do klasycznej teorii cząstek i pól – B. Kosjakow ________________________________________________________________________________________________

56
IX. Przestrzenie unitarne unormowane – droga do przestrzeni Hilberta. Do tej pory rozpatrywaliśmy przestrzenie liniowe rzeczywiste, teraz rozpatrzymy przestrzeń liniową zespoloną. Chcielibyśmy zdefiniować analog iloczynu skalarnego dla przestrzeni zespolonych. Jednakże standardowo określona forma dwuliniowa f (x, y ) = x1y1 + x2 y2 + …. + xn yn ∈ C nie jest odpowiednia, ponieważ odpowiadająca jej forma
kwadratowa f (x , x ) miałaby nieprzyjemną własność : | ix |2 = f (ix , ix ) = i2 f (x , x ) = − | x |2, jeśli wi ęc x ≠ 0 i
| x | > 0 to | ix |2 < 0 Definicja. Niech G będzie przestrzenią liniową zbudowaną nad ciałem liczb zespolonych C. Odwzorowanie f : G × G → C nazywamy formą półtoraliniową jeśli : a) f (α p + βq , r ) = αf (p, r ) + βf (q, r ) , dla dowolnych α, β ∈ C , q, p, r ∈ G tj. forma f jest liniowa względem pierwszego argumentu, gdy drugi jest ustalony.
b) f (p , αq + β r ) = α- f (p, q ) + β- f (p, q ) , α- , β- - liczby zespolone sprzężone do α, β tj. półtoraliniowość względem drugiego argumentu, gdy pierwszy jest ustalony. Formę półtoraliniową nazywamy hermitowską, jeśli :
f (p, q ) = f - (q, p ) Jeśli przy tym f (p, p ) ≥ 0 oraz f (p, p ) = 0 ⇔ p = 0, to formę nazywamy dodatnio określoną.
Jeżeli rozpatrujemy przestrzeń rzeczywistą to α- = α i β- = β więc przy ustalonym wektorze q forma półtoraliniowa jest liniowa również względem p tj. forma hermitowska przechodzi w zwykłą formę dwuliniową.
Elementy macierzy F, odpowiadającej formie hermitowskiej spełniają warunek : fij = f -ji tzn. F = FT –
gdzie FT – jest macierzą sprzężoną do macierzy F transponowanej. Macierze spełniające ten warunek nazywamy macierzami hermitowskimi. Elementy diagonalne macierzy hermitowskiej są liczbami rzeczywistymi. Wyznacznik macierzy hermitowskiej jest liczbą rzeczywistą. Definicja. Przestrzeń liniową zespoloną G wyposażona w dodatnio określoną formę hermitowską nazywamy przestrzenią unitarną. Definicja. Długością dowolnego wektora q należącego do przestrzeni unitarnej nazywamy liczbę określoną wzorem : | q | = sqrt [ f (q, q ) ] , f (q, q ) – forma hermitowska. Kąty między wektorami w przestrzeni unitarnej jak również relacje ortogonalności definiujemy analogicznie jak w przestrzeni Euklidesa. W przestrzeni euklidesowej przejście od jednej bazy ortonormalnej do drugiej bazy odbywa się za pomocą macierzy ortogonalnych, w przestrzeni unitarnej takie przejście dokonuje się za pomocą macierzy unitarnych. Definicja. Macierz F spełniającą warunek :
F F– T = E , E – macierz jednostkowa, F– T macierz sprzężona do macierzy F , transponowana.
nazywamy macierzą unitarną
Macierz o postaci F– T będziemy nazywali macierzą hermitowsko sprzężoną do macierzy F i będziemy ją oznaczali F*. Macierz unitarna o wyrazach rzeczywistych jest ortogonalna. Twierdzenie. Macierze unitarne stopnia n tworzą grupę U(n), zwaną grupą unitarną. Grupa U(n) zawiera podgrupę O(n) – macierzy ortogonalnych. Macierze unitarne o wyznaczniku 1 tworzą grupę zwaną specjalną grupą unitarną SU(n) W przestrzeni unitarnej możemy wprowadzić bazę ortonormalną w której forma hermitowska będzie miała macierz diagonalną. Twierdzenie Sylvestera o bezwładności przenosi się na formy hermitowskie. Iloczyn skalarny w przestrzeni unitarnej zazwyczaj oznaczamy tak < . , . >

57
Przestrzenie liniowe unormowane i metryczne. Przestrzeń Banacha. Definicja. Parę (Q, d ), gdzie Q jest przestrzenią liniową (rzeczywistą lub zespoloną ) a w ogólności pewnym zbiorem , d jest odwzorowaniem d : Q × Q → R ( tj. funkcją przyjmującą wartości rzeczywiste ) , nazywamy przestrzenia metryczną jeśli dla dowolnych x , y ∈ Q spełnione są następujące warunki : a) d(x , y ) = d(y, x ) ( symetryczność ) b) d(x, y ) = 0 ⇔ x = y c) d(x, z ) ≤ d(x, y ) + d(y, z ) ( nierówność trójkąta ) Funkcje d spełniająca te warunki nazywamy metryką. Liczbę d(x, y ) nazywamy odległością punktów x , y. Szczególnie ważne są przypadki, gdy metryka spełnia jeszcze dwa dodatkowe warunki : d) d(x, z ) = d( x + z, y + z ) ( niezmienniczość względem przesunięć ) e) d( λx, λz ) = | λ | d(x, y ) ( przemnożenie wektorów przez skalar zwiększa ich odległość | λ | razy ) Definicja. Jeżeli metryka d określona w przestrzeni Q spełnia warunki d), e), to liczbę d( x , 0 ) nazywamy normą wektora x ∈ Q i oznaczamy || x ||. Przestrzeń liniową wyposażoną w normę nazywamy przestrzenią unormowaną. Przykład. Przestrzeń Euklidesa jest przestrzenią metryczną jak również unormowaną, metryka i norma określona jest przez iloczyn skalarny tj. || x || = | x | jest to tzw. metryka standardowa. W przestrzeni funkcji całkowalnych z kwadratem metryka może być zadana następująco : a
d( f, g ) = sqrt [ ∫ | f(t) – g(t) |2 dt ] b W przestrzeni metrycznej możemy wprowadzić podstawowe pojęcia topologiczne – pojęcia otoczeń ( kul ) elementu przestrzeni unormowanych. Definicja. Mówimy, że Podzbiór A ⊂ Q jest ograniczony jeśli zawiera się w pewnej kuli. Definicja. Mówimy, że ciąg punktów x1, x2 , ... , x n należących do przestrzeni metrycznej Q jest zbieżny do punktu
y ∈ Q jeśli lim d (xn , y) = 0
n → ∞ Ciąg x1, x2 , ... , x n nazywamy ciągiem Cauchy’ego, jeśli dla każdego ε > 0 istnieje N = N(ε), takie, że d(xn , xm ) < ε
dla m, n > N(ε) Definicja. Przestrzeń metryczną Q nazywamy zupełną, jeśli dowolny ciąg Cauchy’ego w tej przestrzeni jest zbieżny. Definicja. Przestrzeń unormowaną zupełną nazywamy przestrzenią Banacha.
Przykład. Przestrzenie Rn , Cn o metrykach : n n
d(x, y ) = ( Σ | xi − yi |2 )½ , d(x, y ) = max | xi − yi | , d(x, y ) = Σ | xi − yi |
i=1 i = 1, …, n i=1 są przestrzeniami zupełnymi, są nadto przestrzeniami Banacha.
58
Przestrzeń mechaniki kwantowej – przestrzeń Hilberta. Podstawowe definicje. Definicja. Przestrzenią Hilberta ℵ, nazywamy unitarna przestrzeń Banacha z normą określoną przez iloczyn skalarny. W szczególności przestrzeń Hilberta jest przestrzenia liniową ( skończenie lub nieskończenie wymiarową ) zbudowaną nad ciałem liczb zespolonych, w której określono normę za pomocą formy metrycznej. Zespolona ( nieskończenie wymiarowa ) przestrzeń Hilberta jest „naturalnym” środowiskiem w którym formułujemy prawa mechaniki kwantowej. Elementy przestrzeni Hilberta przejęło się nazywać wektorem stanu lub ketem ( terminologia wprowadzona przez Diraca ) Elementy przestrzeni Hilberta kety, oznaczamy symbolem | > np. | a > , | β > W przestrzeni Hilberta tak jak w „zwykłej” przestrzeni liniowej wprowadzamy pojęcie liniowej zależności wektorów : ( oznaczenia słuszne dla skończenie wymiarowej przestrzeni Hilberta ) n
| V > = Σ αi | ei > ; oczywiście kety | ei > tworzą bazę , αi składowe keta w zadanej bazie ( najczęściej zespolone ) i=1 Iloczyn skalarny w przestrzeni Hilberta określony jest przez formę hermitowską. Wektorem dualnym do keta jest wektor bra, oznaczany < | , wektory bra należą do przestrzeni dualnej ℵ*. Jeżeli mamy dany pewien ket V o składowych w ustalonej bazie, zapiszmy go teraz jako wektor kolumnowy : ( α1 )
( ... ) ( αn )
,to wektor do niego dualny tj. wektor bra W, będzie miał składowe ( w ustalonej bazie )( wektor wierszowy ) :
( α-1 , ... , α-n )
( transpozycja i sprzężenie zespolone ) Iloczyn skalarny wektorów bra i ket możemy teraz zapisać w prosty i naturalny sposób :
< W | V > = ( α-1 , ... , α-n ) ( α1 )
( ... ) ( αn )
W przestrzeni dualna tj. przestrzeni wektorów bra, możemy wprowadzić bazę w szczególności bazę ortogonalną do bazy wektorów ket tj. jeżeli ( e1 , ... , en ) jest bazą w przestrzeni Hilberta, a ( k1 , ... , kn ) baza w przestrzeni do niej dualnej
to < ki | ej > = δij
Z zapisu tego widać ekonomikę zapisu z użyciem notacji Diraca. Oczywiście nie ma sensu w takim zapisie iloczyn dwóch wektorów ket tj. iloczyn o postaci | V > | W >, oraz iloczyn skalarny dwóch wektorów bra. Można jednak pokazać, że ma sens wyrażenie : | V > < W | - jest to operator Definicja. Jeżeli dane jest odwzorowanie F, przyporządkowujące pewnemu ketowi | V > inny ket | V’ > to mówimy, że w przestrzeni Hilberta zadano pewien operator F F : | V > → | V’ > Jeżeli operator F spełnia następujące warunki : F ( | V1 > + | V2 > ) = F | V1 > + F | V2 >
F ( a | V > ) = a F | V > | V1 > , | V2 > ∈ ℵ , a ∈ C
to mówimy, że operator F jest operatorem liniowym. Całkowicie analogicznie definiujemy operatory liniowe działające w przestrzeni dualnej tj. operatory F : < V | → < V’ | Szczególnym przypadkiem operatora jest operator jednostkowy I : I | α > = | α > Definicja. Operator Pψ = | ψ > < ψ | nazywamy operatorem rzutowym ( operator rzutowania ).
Operator rzutowy działając na dowolny ket | φ > daje ket proporcjonalny do | ψ > : Pψ | φ > = | ψ > < ψ | φ > = α | φ > , α – pewna liczba ( zespolona )
Innymi słowy operator Pψ działający na dowolny ket, rzutuje go na kierunek wyznaczony przez ket | ψ >.
Oczywiście Pψ Pψ = Pψ tj. ponowne rzutowanie na kierunek ψ niczego zmienia.

59
Definicja. Niech P, S będą operatorami działającymi w przestrzeni Hilberta. Komutatorem tych operatorów nazywamy operator zdefiniowany następująco : [ P, S ] = PS – SP operatory nazywamy przemiennymi jeżeli ich komutator jest równy zeru.
Każdemu ketowi α | V > = | α V > odpowiada wektor bra < V | α- ( stwierdzenie odwrotne nie jest w ogólności słuszne )
Niech P będzie pewnym operatorem Każdemu ketowi P | V > odpowiada wektor bra < V | P† ,
P† - operator hermitowsko sprzężony do operatora P ( macierz odpowiadająca operatorowi P† jest macierzą operatora P transponowaną i sprzężoną zespolenie ).
Definicja. Operator P nazywamy operatorem hermitowskim jeśli P = P† , antyhermitowskim jeśli P = − P†,
Unitarnym, jeśli PP† = 1 Jeżeli P jest operatorem hermitowskim to :
< φ | P† | φ > = < φ | P | φ >- Zestawienie użytecznych wzorów :

60
Quantum Computation and Quantum Information - Michael A. Nielsen, Isaac L. Chuang, Cambridge, 2010 Ogólny spis tematów poruszonych w przedstawionym tekście . 1. Aksjomaty przestrzeni liniowej V (wektorowej ) nad zadanym ciałem skalarów K
( liczb rzeczywistych R lub zespolonych C – pojecie wektora v ( v→ )
1.1 liniowa zależność zbioru wektorów – baza przestrzeni wektorowej ( e1, ... , en ), wymiar przestrzeni liniowej dim V = n
1.2 Rozkład wektora w zadanej bazie v = e1α1 + ... αn en , αn ∈ K,
1.3 Zamiana bazy, wzory przekształcenia dla wektorów bazy i współrzędnych wektora. 1.4 Orientacja przestrzeni liniowej. Podprzestrzeń, danej przestrzeni liniowej, suma prosta przestrzeni liniowych V1 ⊕ V2 2. Odwzorowania liniowe. 2.1 Forma liniowa – pojęcie kowektora. 2.2 Baza i kobaza. Rozkład kowektora w kobazie. Wzory dla przekształceń kowektorów. 2.3 Forma biliniowa. Iloczyn skalarny. Przestrzeń liniowa z określonym w niej iloczynem skalarnym. 2.4 Pojęcie metryki (pseudometryki). Przestrzeń Euklidesa. Przestrzenie pseudoeuklidesowe. Przestrzeń symplektyczna. 2.5 Transformacje ortogonalne. 3. Przestrzenie afiniczne. 4. Przestrzeń liniowa nad ciałem liczb zespolonych. 4.1 Formy hermitowskie. 4.2 Przestrzeń unitarna. 4.3 Przestrzeń Banacha, przestrzeń Hilberta. 5. Algebra liniowa – ogólne struktury algebraiczne. 5.1 Iloczyny wewnętrzne i zewnętrzne. Iloczyn tensorowy. 5.2 Macierze odwzorowań liniowych. Operatory. 5.3 Funkcje operatorów. 5.4 Komutatory. 5.5 Rozkład spektralny
61
Literatura. 1) „Wykłady z algebry liniowej” -- I. M. Gelfand PWN 1975 2) „Algebra liniowa dla inżynierów” -- W. W. Sawyer PWN 1976 3) „Algebra liniowa” -- A. Mostowski, M. Stark PWN 1974 4) „Algebra liniowa wraz z geometrią wielowymiarową” -- N. W. Jefrimow, E. R. Rozendorn PWN 1974 5) „Algebra z geometrią dla fizyków” -- S. Fudali UW Wrocław 1974 6) „Algebra liniowa w zadaniach” -- W. Dubnicki, L. Filus, H. Sosnowska PWN 1985 7) „Struktury algebraiczne” część II, III -- S. Złonkiewicz WSP Rzeszów 1971 8) „Algebra liniowa z elementami geometrii” -- J. Gancarzewicz UJ Kraków 1993 9) „Geometria z algebrą liniową” -- M. Moszyńska, J. Swięcicka PWN 1987 10) „Wstęp do algebry – Algebra liniowa” -- A. I. Kostrykin WN-PWN 2007 11) „Algebra z geometrią dla fizyków” -- L. Górniewicz, R. S. Ingarden UMK Toruń 2000 12) „Algebra liniowa i geometria” -- A. I. Kostrykin, J. I. Manin WN-PWN 1993 13) „Algebra i analiza tensorów” -- J. Ploch PW Warszawa 1990 14) „Algebra” -- Z. Opial PWN 1975 15) „Algebra liniowa z geometrią” -- A. Białynicki-Birula PWN 1976 16) „Algebra geometryczna” -- W. Więsław UW Wrocław 1974 Literatura dodatkowa 1) „Elementy historii matematyki” -- N. Bourbaki PWN 1980 2) „Atlas matematyki” -- F. Reinhardt, H. Soeder Prószyński i S-ka 2003 3) „Spotkanie z matematyką” -- L. Garding WN-PWN 1993 5) „Mechanika kwantowa – ujęcie w przestrzeni Hilberta” -- M. Grabowski, R. S. Ingarden PWN 1989 6) „Mechanika kwantowa dla filozofów” -- M. Heller OBI 1996 7) „Mechanika kwantowa” -- R. Shankar WN- PWN 2006 *************************************************** *******************************************