Politechnika Gdańska Wydział Elektrotechniki i Automatyki · Wydział Elektrotechniki i...
95
Podstawowe sposoby opisu niepewności, wybrane zagadnienia zastosowania estymacji rekursywnej dla potrzeb monitorowania i diagnostyki w systemach sterowania Monitorowanie i Diagnostyka w Systemach Sterowania Monitorowanie i Diagnostyka w Systemach Sterowania (MiDwSS MiDwSS) MiDwSS 2013 Politechnika Gdańska Wydział Elektrotechniki i Automatyki Kierunek: Automatyka i Robotyka Specjalność: Systemy Sterowania i Wspomagania Decyzji Studia stacjonarne II stopnia: rok I, semestr II Opracowanie: dr inż. Tomasz Rutkowski
Transcript of Politechnika Gdańska Wydział Elektrotechniki i Automatyki · Wydział Elektrotechniki i...
Podstawowe sposoby opisu niepewności,wybrane zagadnienia zastosowania estymacji rekursywnej dla potrzeb monitorowania i diagnostyki w systemach sterowania
Monitorowanie i Diagnostyka w Systemach SterowaniaMonitorowanie i Diagnostyka w Systemach Sterowania((MiDwSSMiDwSS))
MiDwSS 2013
Politechnika Gdańska
Wydział Elektrotechniki i Automatyki
Kierunek: Automatyka i Robotyka
Specjalność: Systemy Sterowania i Wspomagania Decyzji
Studia stacjonarne II stopnia: rok I, semestr II
Opracowanie: dr inż. Tomasz Rutkowski
Plan prezentacjiPlan prezentacji
• Podstawowe sposoby opisu niepewności
• Liniowe i rekursywne postaci obserwatorów Luenbergera Filtr RLS (ang. Recursive Least Squares) Filtr WRLS (ang. Weighted Recursive Least Squares) Filtr Kalmana (ang. Kalman Filter, KF )
• Nieliniowe i rekursywne postaci obserwatorów
MiDwSS 2013 2
• Nieliniowe i rekursywne postaci obserwatorów Filtr RLS i WRLS Rozszerzony Filtr Kalmana (ang. Extended Kalman Filter,
EKF)
• Sformułowanie zadań estymacji punktowej (RLS, WRLS) oraz przedziałowej (ang. set bounded) zmiennych i parametrów obiektów dynamicznych (liniowych/nieliniowych) na ruchomym oknie pomiarowym – zadania optymalizacji
Schemat ideowy układu diagnostykiSchemat ideowy układu diagnostyki
• PRZYKŁADOWE ESTYMATORY
MiDwSS 2013 3
• PRZYKŁADOWE ESTYMATORY
Schemat ideowy układu diagnostykiSchemat ideowy układu diagnostyki
• Estymacja parametrów
Filtr RLS
Filtr WRLS
Rozszerzony Filtr Kalmana
estymatory oparte o metody optymalizacji (rozwiązanie odpowiednich zadań optymalizacji prowadzących do estymatpunktowych lub przedziałowych)
…
MiDwSS 2013 4
…
• Estymacja wyjść/stanu:
Obserwator Laundbergera
Filtr Kalmana, Rozszerzony Filtr Kalmana
estymatory oparte o metody optymalizacji (rozwiązanie odpowiednich zadań optymalizacji prowadzących do estymatpunktowych lub przedziałowych)
…
OB
X Y
Θ
Θ
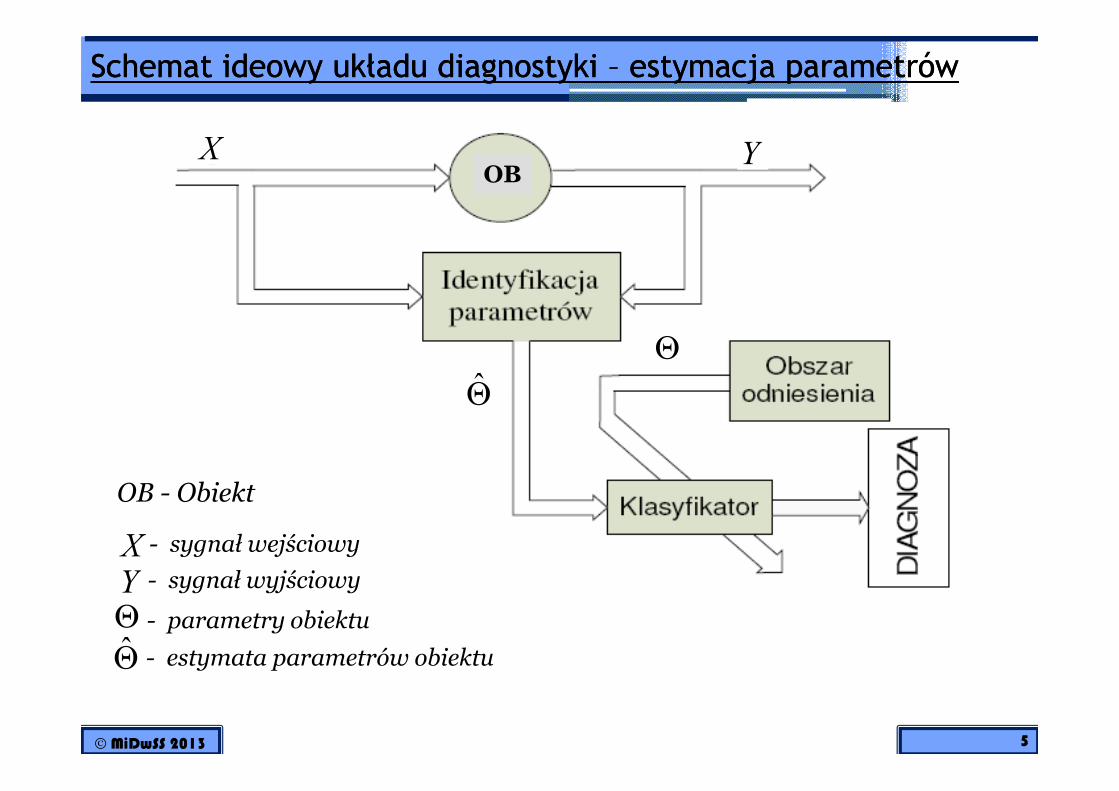
Schemat ideowy układu diagnostyki Schemat ideowy układu diagnostyki –– estymacja parametrówestymacja parametrów
MiDwSS 2013
Θ
5
OB - Obiekt
X - sygnał wejściowy
Y - sygnał wyjściowy
- parametry obiektuΘ
- estymata parametrów obiektuΘ
OB
OB
Y)
YX
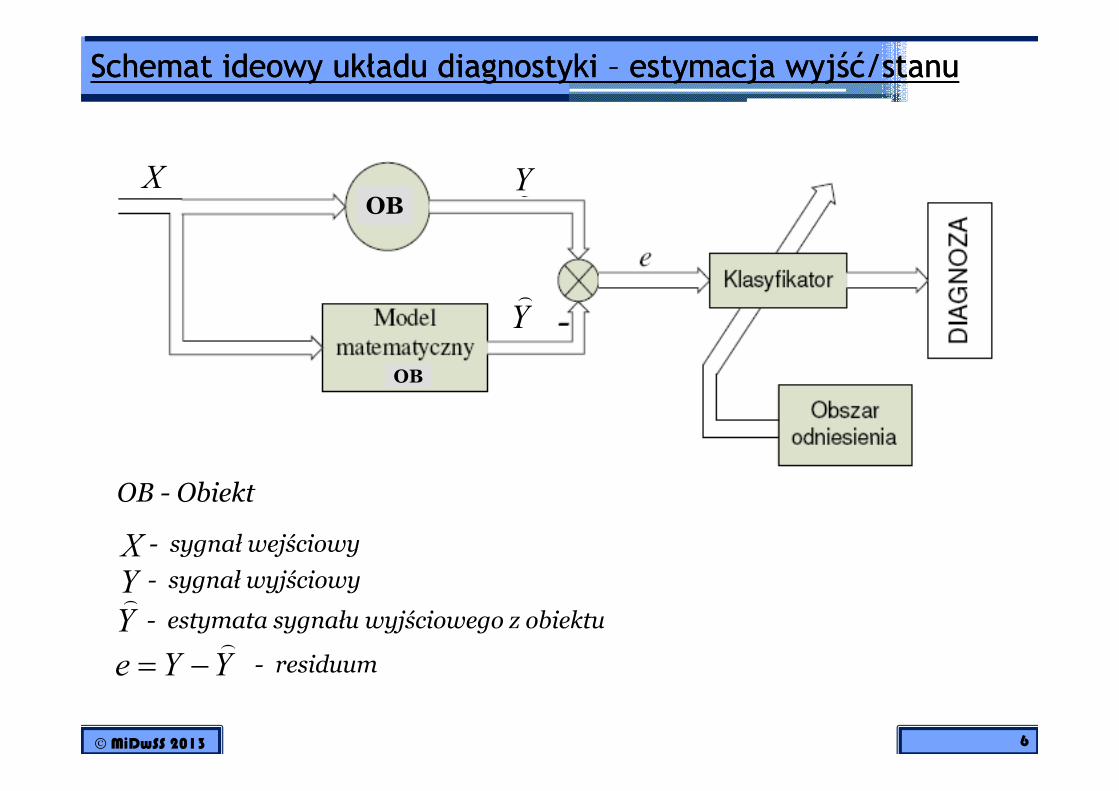
Schemat ideowy układu diagnostyki Schemat ideowy układu diagnostyki –– estymacja wyjść/stanuestymacja wyjść/stanu
MiDwSS 2013 6
OB - Obiekt
X - sygnał wejściowy
Y - sygnał wyjściowy
- estymata sygnału wyjściowego z obiektuY)
YYe)
−= - residuum
OB
X Y
Θ
,Θ
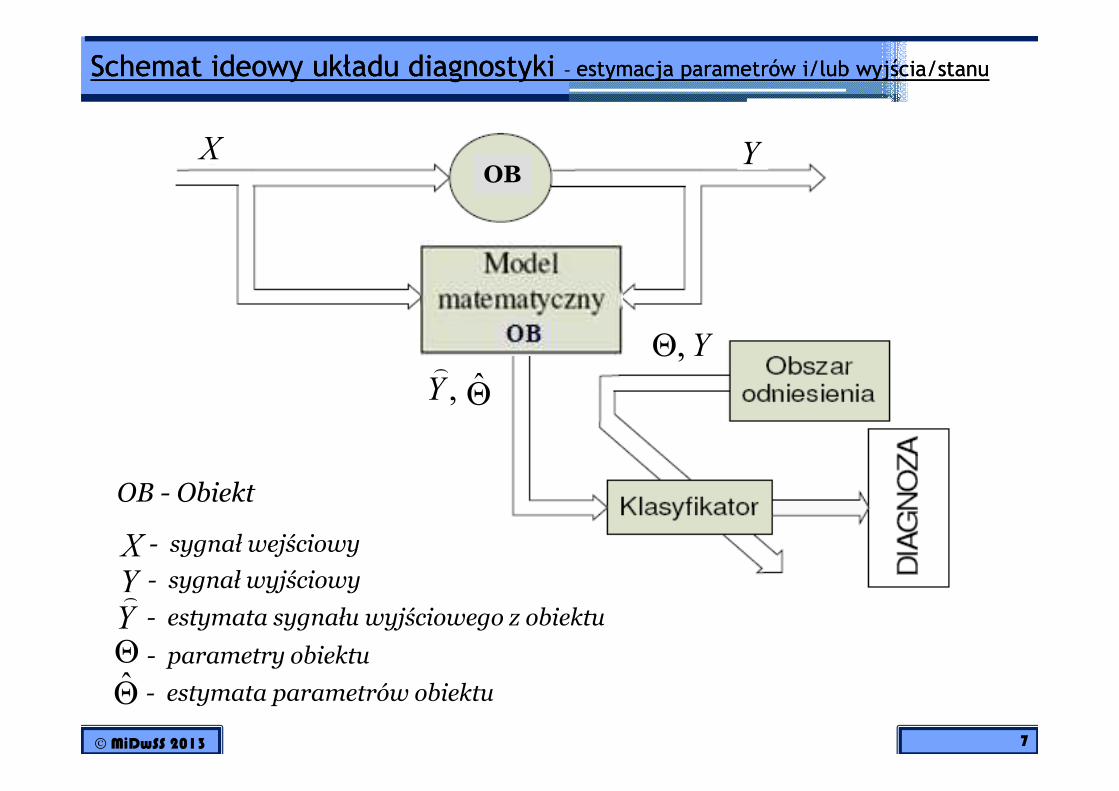
Schemat ideowy układu diagnostyki Schemat ideowy układu diagnostyki –– estymacja parametrów i/lub wyjścia/stanuestymacja parametrów i/lub wyjścia/stanu
,Y)
Y
MiDwSS 2013
Θ
7
OB - Obiekt
X - sygnał wejściowy
Y - sygnał wyjściowy
- parametry obiektuΘ
- estymata parametrów obiektuΘ
- estymata sygnału wyjściowego z obiektuY)
,Y
Estymacja, Estymacja, ObserwatoryObserwatory, Filtry, Filtry
• Estymacja to proces podejmowania decyzji lub wydawania sądu, co do przybliżonej wartości pewnych parametrów czy zmiennych charakteryzujących dany obiekt, na podstawie dostępnej informacji o obiekcie, łącznie z danymi o procesach w nim zachodzących, uporządkowane w danym zbiorze obserwacji.
MiDwSS 2013 8
• Idea obserwatora stanu polega na wykorzystaniu sygnałów wejściowych i wyjściowych systemu dynamicznego do estymacji (śledzenia zmienności) zmiennych stanu.
• Idea filtracji polega na takim przekształceniu sygnału „wejściowego”, przez filtr o odpowiedniej strukturze, aby wynik filtracji jak najmniej różnił się od sygnału „odniesienia” przy założonym kryterium błędu.
• PODSTAWOWE MODELE NIEPEWNOŚCI
MiDwSS 2013 9
• PODSTAWOWE MODELE NIEPEWNOŚCI
Modele niepewnościModele niepewności
• W praktyce każdy zbiór rzeczywistych obserwacji zawiera informacje obarczone błędami, co związane jest to głównie z niepewnością, niedeterministycznym charakterem obiektu.
• Uwzględniając fakt, iż nie zawsze dysponujemy „pełną” informacją pomiarową (chociażby ze względów finansowych)
MiDwSS 2013 10
problem estymacji można zdefiniować jako szacowanie wielkości niemierzonych (nieznanych) parametrów i zmiennych charakteryzujących obiekt na podstawie dostępnych obserwacji (pomiarów) innych parametrów i zmiennych badanego obiektu oraz na bazie modelu matematycznego obiektu opisującego relacje pomiędzy charakteryzującymi go zmiennymi i parametrami.
Modele niepewnościModele niepewności
• Wykorzystanie modeli matematycznych jak i danych pomiarowych, w celu estymacji nieznanych parametrów i zmiennych charakteryzujących obiekt, jednoznacznie wiąże się z niepewnością.
• Źródła niepewności wynikają przede wszystkim z:
MiDwSS 2013 11
błędów struktury modelu matematycznego, niepewnych parametrów modelu matematycznego, błędów pomiarowych obserwowanych wielkości, błędów metod numerycznych i symulacji (dokładność
obliczeń, błędy zaokrągleń itp.), wiedzy a priori oraz heurystyk wykorzystanych przy budowie
modelu systemu (niepewność w tym przypadku jest bardzo trudna do oszacowania).
Modele niepewnościModele niepewności
• Trudno jest wskazać uniwersalną metodę opisu niepewności.
• Przy wyborze jej odpowiedniej reprezentacji należy wziąć pod uwagę między innymi następujące aspekty związane z jej opisem: przyczyny niepewności,
MiDwSS 2013 12
przyczyny niepewności, ilość jak i jakość dostępnej informacji, typ dostępnej informacji, metody przetwarzania dostępnych informacji, itp.
Modele niepewnościModele niepewności
• Wyróżnia się wiele sposobów opisu niepewności, z których najczęściej wykorzystuje się następujące modele:
probabilistyczny model niepewności,
rozmyty model niepewności,
MiDwSS 2013 13
rozmyty model niepewności,
model niepewności wyrażony w postaci zbiorów ograniczonych (ang. set-bounded).
Modele niepewnościModele niepewności
• Probabilistyczny model niepewności:
nieznane wielkości reprezentowane są przez wartości zmiennych losowych wylosowanych ze ściśle określonych zbiorów, niepewność opisana jest przez rozkład prawdopodobieństwa; trajektorie tych wielkości są reprezentowane przez procesy stochastyczne.
MiDwSS 2013 14
Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Zmienna losowa:
nxxxX ,,,
21K∈
MiDwSS 2013 15
Prawdopodobieństwo że zmienna losowa X przyjmie wartość ze zbioru [a, b]:
[ ]( )baXP ,∈
Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Średnia
∑=
=
n
i
ix
n
x
1
1
MiDwSS 2013 16
Wartość oczekiwana (najbardziej prawdopodobna w sensie statystycznym)
( ) ∑=
∞→
=
n
i
in
xn
XE
1
1lim
( )x
mmXXE ==== µ
inne oznaczenia
Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Wariancja
( )( )[ ] ( )[ ] ( )∑=
∞→
−=−=−=
n
i
in
mxn
mXEXEXE
1
222 1limυ
MiDwSS 2013 17
Odchylenie standardowe
υσ =
wartość rozrzutu realizacji wokół wartości średniej
wartość koncentracji realizacji xiw przedziale [m-σ, m+σ]
( )( )[ ] ( ) ( )222
XEXEXEXE −=−=υ
Modele niepewnościModele niepewności
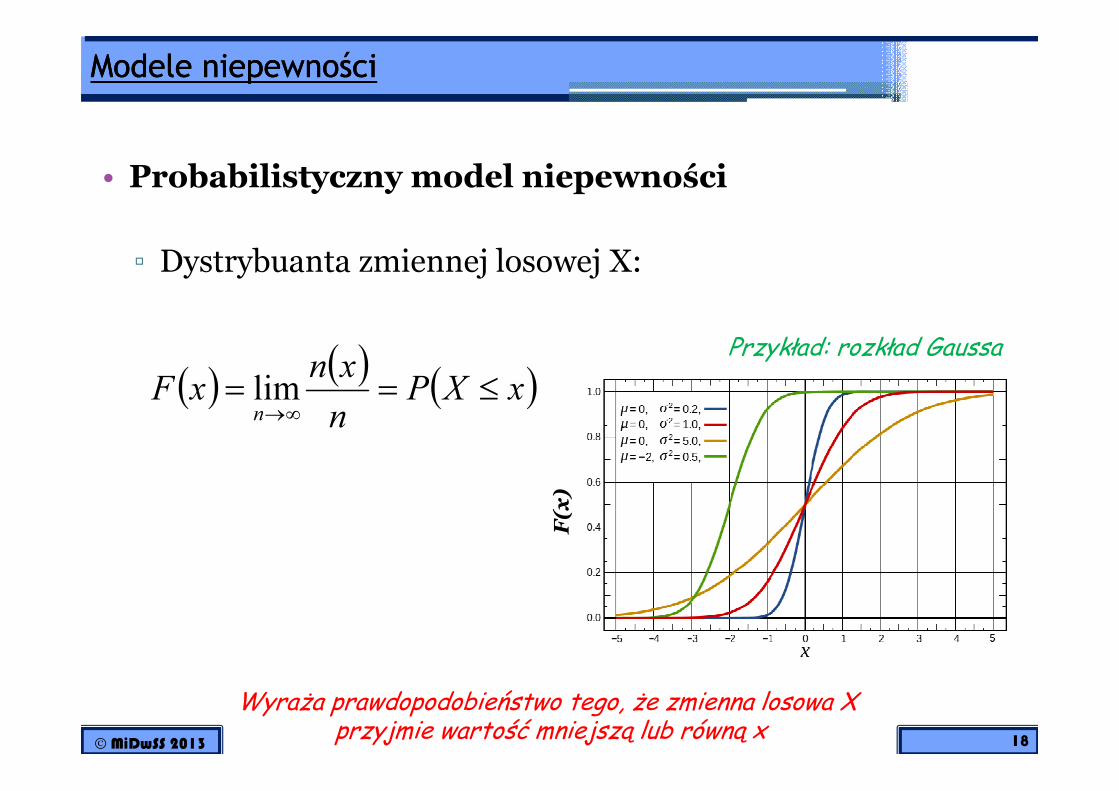
• Probabilistyczny model niepewności
Dystrybuanta zmiennej losowej X:
( )( )
( )xXPn
xnxF ≤== lim
Przykład: rozkład Gaussa
MiDwSS 2013 18
( ) ( )xXPn
xFn
≤==∞→
lim
Wyraża prawdopodobieństwo tego, że zmienna losowa X przyjmie wartość mniejszą lub równą x
F(x
)
Modele niepewnościModele niepewności
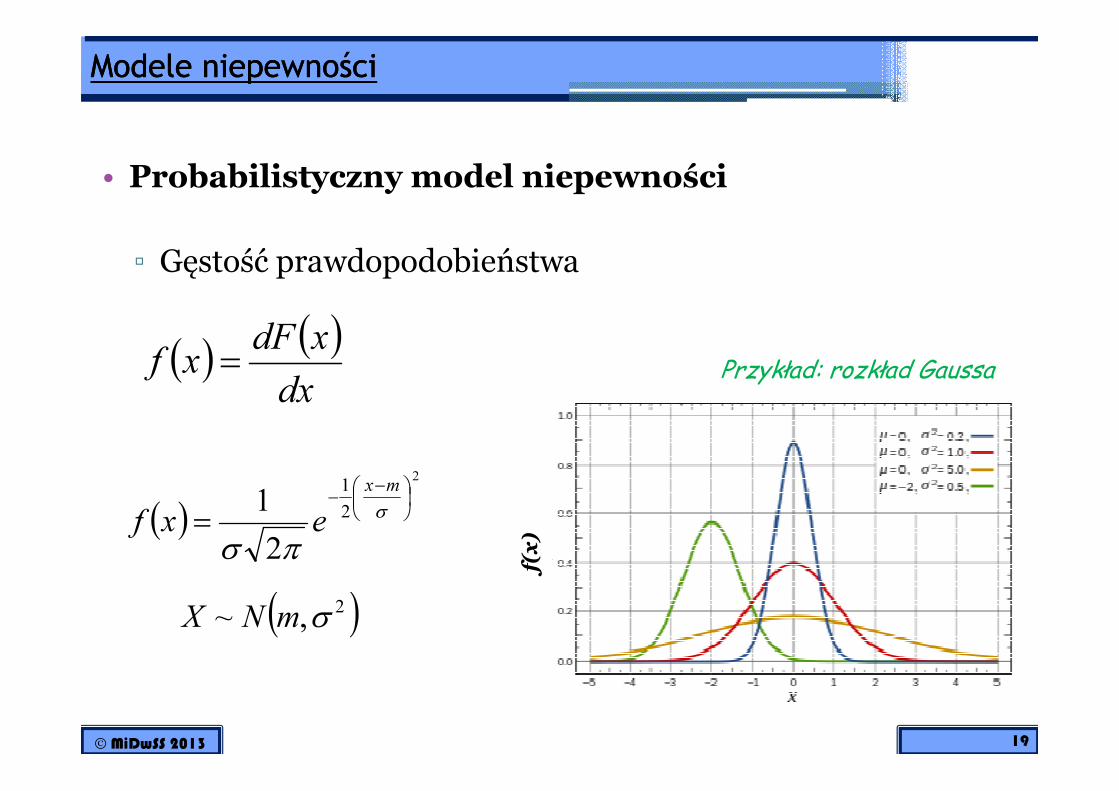
• Probabilistyczny model niepewności
Gęstość prawdopodobieństwa
( )( )
dx
xdFxf = Przykład: rozkład Gaussa
MiDwSS 2013 19
dx
f(x
) ( )
2
2
1
2
1
−−
=σ
πσ
mx
exf
( )2,~ σmNX
Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
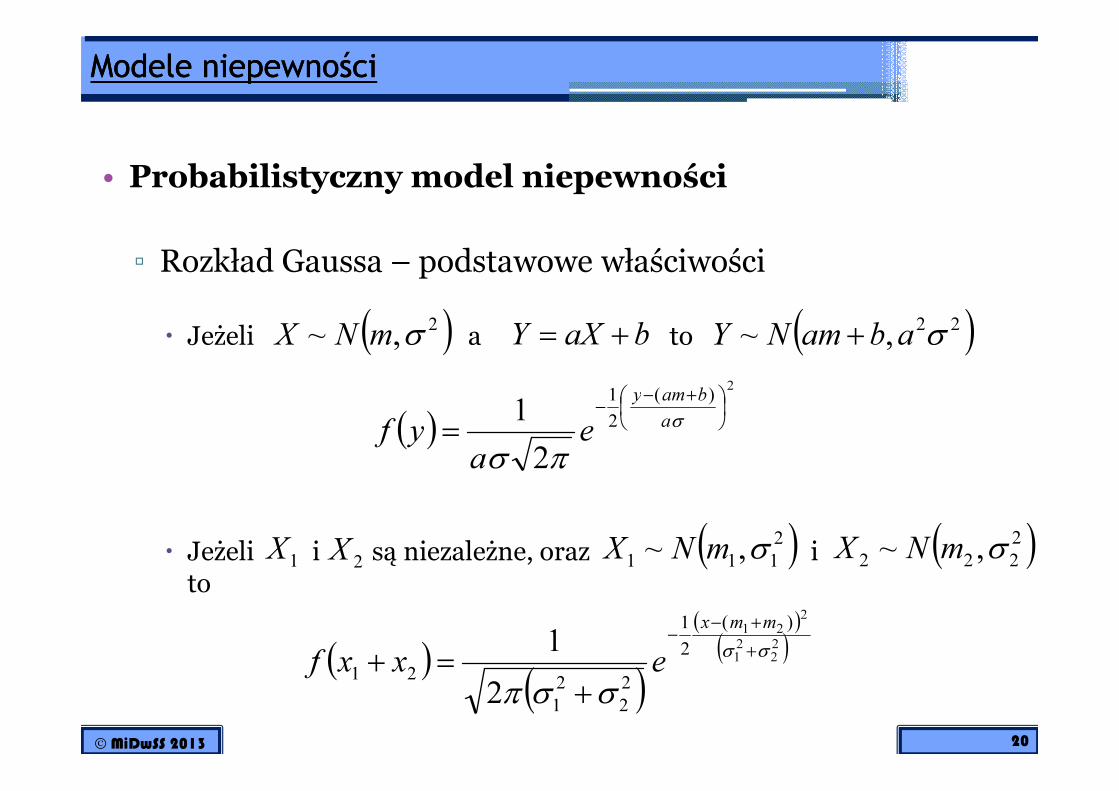
Rozkład Gaussa – podstawowe właściwości
Jeżeli a to
2)(1
1
+−
−bamy
( )2,~ σmNX baXY += ( )22,~ σabamNY +
MiDwSS 2013 20
Jeżeli i są niezależne, oraz ito
( ))(
2
1
2
1
+−−
=σ
πσ
a
bamy
ea
yf
( )2111
,~ σmNX1
X2
X ( )2222
,~ σmNX
( )( )
( )
( )22
2
1
2
21)(
2
1
2
2
2
1
21
2
1σσ
σσπ
+
+−
−
+
=+
mmx
exxf
Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
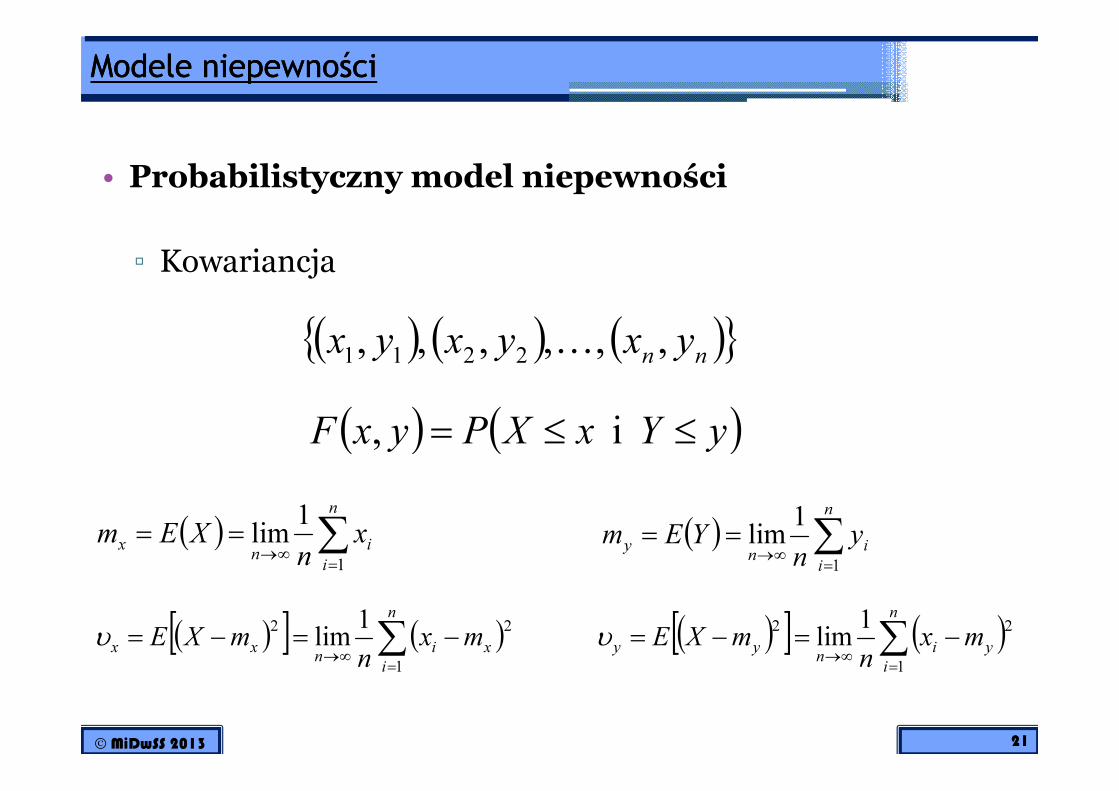
Kowariancja
( ) ( ) ( ) nnyxyxyx ,,,,,,
2211K
MiDwSS 2013 21
( ) ( )yYxXPyxF ≤≤= i ,
( ) ∑=
∞→
==
n
i
in
xx
nXEm
1
1lim ( ) ∑
=
∞→
==
n
i
in
yy
nYEm
1
1lim
( )[ ] ( )∑=
∞→
−=−=
n
i
xin
xxmx
nmXE
1
22 1limυ ( )[ ] ( )∑
=
∞→
−=−=
n
i
yin
yy mxn
mXE
1
22 1limυ
Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
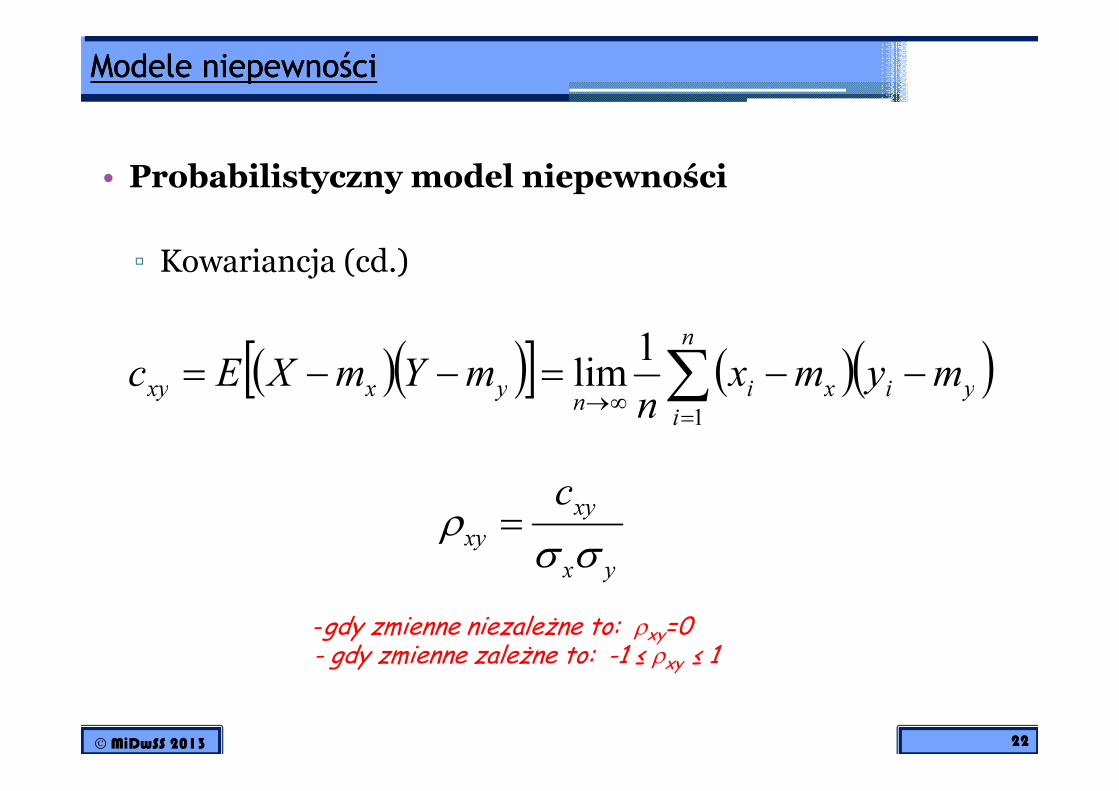
Kowariancja (cd.)
( )( )[ ] ( )( )∑∞→
−−=−−=
n
yixin
yxxymymx
nmYmXEc
1lim
MiDwSS 2013 22
( )( )[ ] ( )( )∑=
∞→i
yixin
yxxyn 1
yx
xy
xy
c
σσρ =
-gdy zmienne niezależne to: ρxy=0- gdy zmienne zależne to: -1 ≤ ρxy ≤ 1
Modele niepewnościModele niepewności
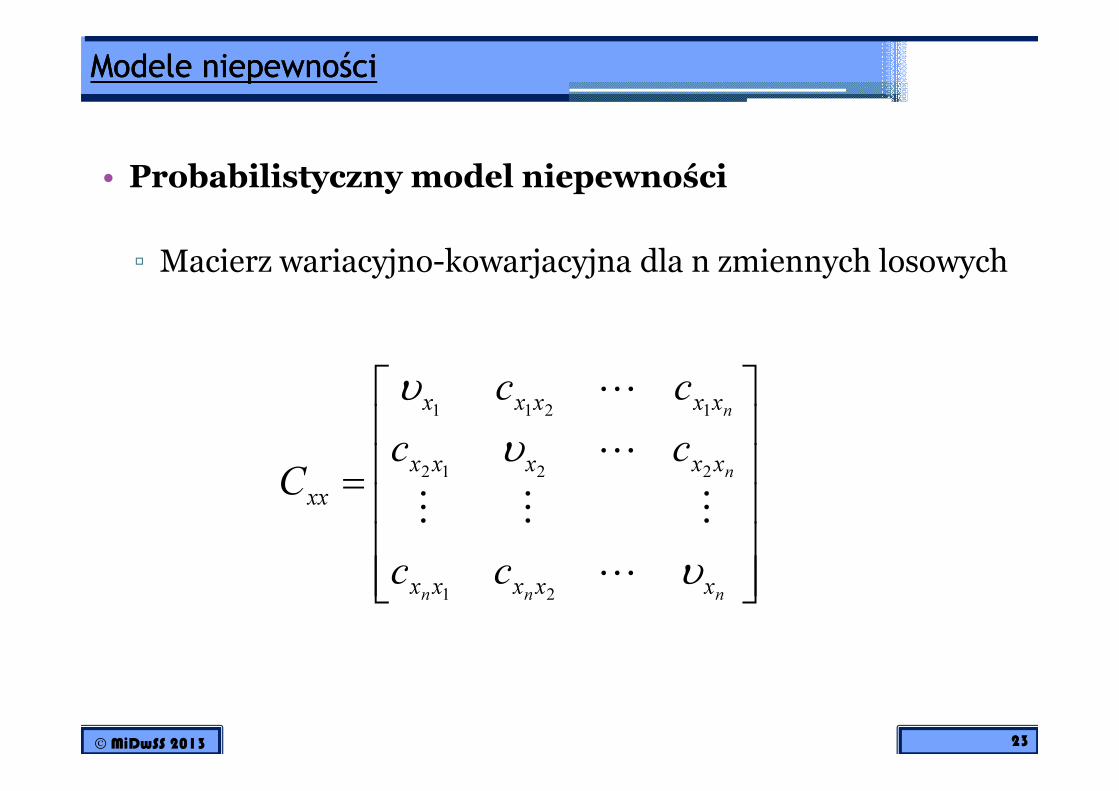
• Probabilistyczny model niepewności
Macierz wariacyjno-kowarjacyjna dla n zmiennych losowych
xxxxx
ccυ L
MiDwSS 2013 23
=
nnn
n
n
xxxxx
xxxxx
xxxxx
xx
cc
cc
cc
C
υ
υ
υ
L
MMM
L
L
21
2212
1211

Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Autokorelacja
( ) ( ) ( )[ ]2121
,, tXtXEttR =
MiDwSS 2013 24
Jeżeli proces jest stacjonarny to:21tt −=τ
( ) ( ) ( )[ ]ττ −= tXtXER ,
Modele niepewnościModele niepewności
• Probabilistyczny model niepewności
Biały szum
( )τR
MiDwSS 2013 25
ττ−
Modele niepewnościModele niepewności
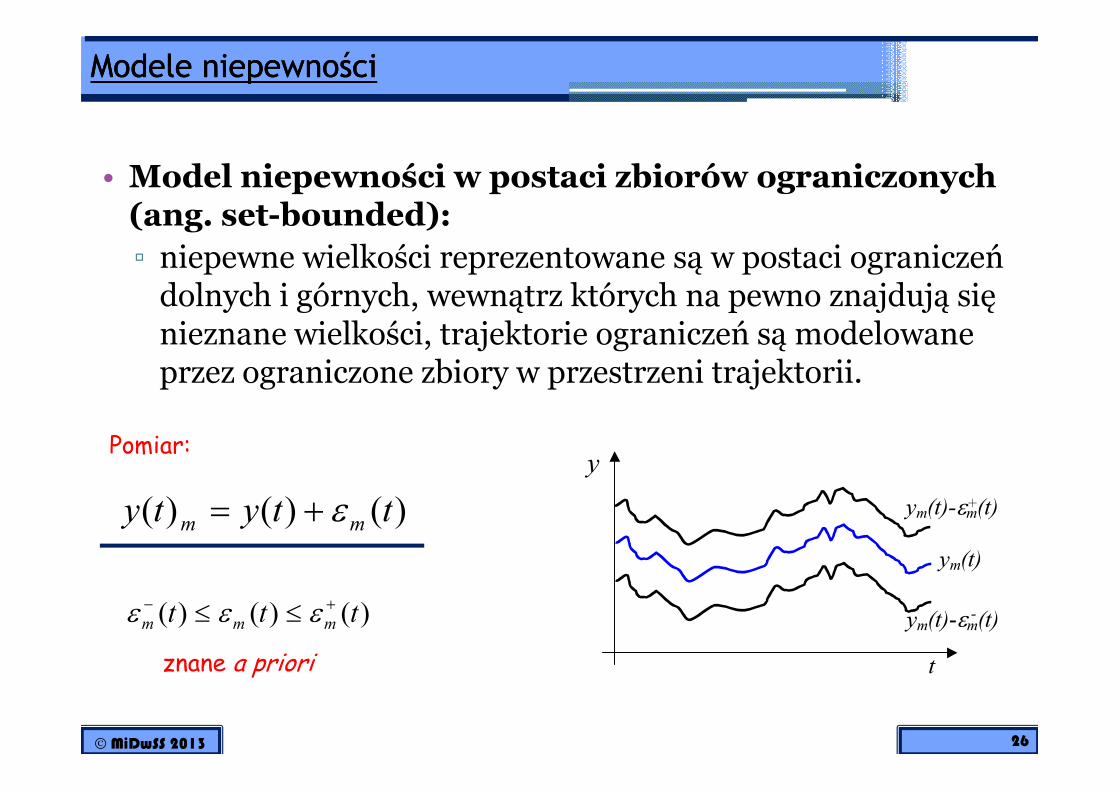
• Model niepewności w postaci zbiorów ograniczonych (ang. set-bounded):
niepewne wielkości reprezentowane są w postaci ograniczeń dolnych i górnych, wewnątrz których na pewno znajdują się nieznane wielkości, trajektorie ograniczeń są modelowane przez ograniczone zbiory w przestrzeni trajektorii.
MiDwSS 2013 26
t
y
ym(t)
ym(t)-εm(t)
ym(t)-εm(t)
+
-
)()()( ttytymm
ε+=
)()()( tttmmm
+−
≤≤ εεε
znane a priori
Pomiar:
Modele niepewnościModele niepewności
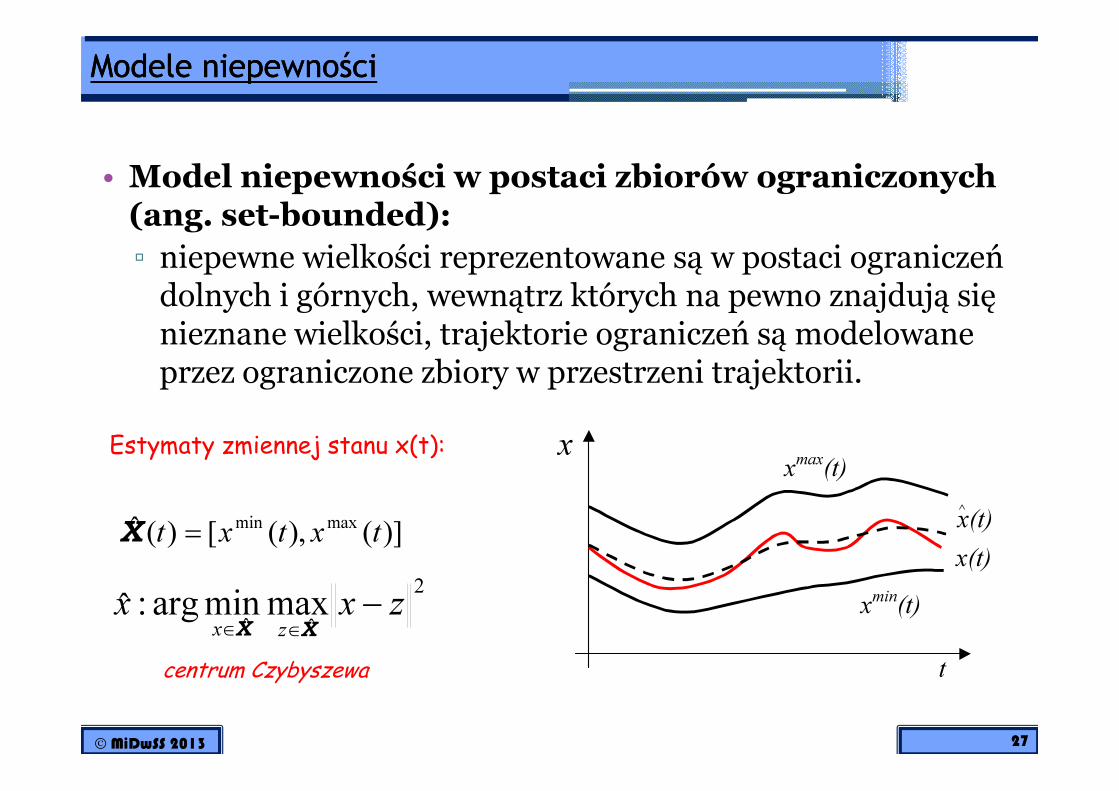
• Model niepewności w postaci zbiorów ograniczonych (ang. set-bounded):
niepewne wielkości reprezentowane są w postaci ograniczeń dolnych i górnych, wewnątrz których na pewno znajdują się nieznane wielkości, trajektorie ograniczeń są modelowane przez ograniczone zbiory w przestrzeni trajektorii.
MiDwSS 2013 27
Estymaty zmiennej stanu x(t):
t
x xmax(t)
xmin(t)
x(t)
x(t) ^
2
ˆˆmaxminarg:ˆ zxx
zx
−
∈∈ XX
)](),([)(ˆ maxmintxtxt =X
centrum Czybyszewa
Modele niepewnościModele niepewności
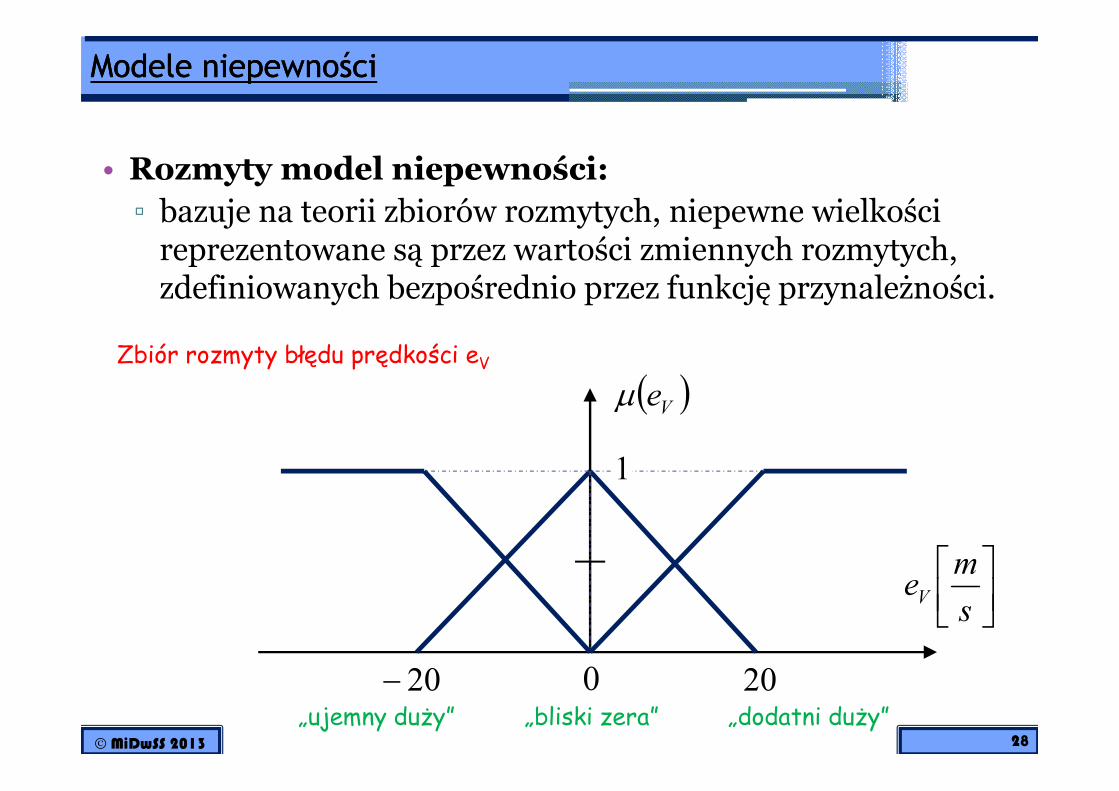
• Rozmyty model niepewności:
bazuje na teorii zbiorów rozmytych, niepewne wielkości reprezentowane są przez wartości zmiennych rozmytych, zdefiniowanych bezpośrednio przez funkcję przynależności.
( )eµ
Zbiór rozmyty błędu prędkości eV
MiDwSS 2013 28
( )Veµ
s
m
eV
1
20− 0 20
„bliski zera” „dodatni duży”„ujemny duży”
• ESTYMACJA PARAMETRÓW
MiDwSS 2013 29
• ESTYMACJA PARAMETRÓW
OB
X Y
Θ
Θ
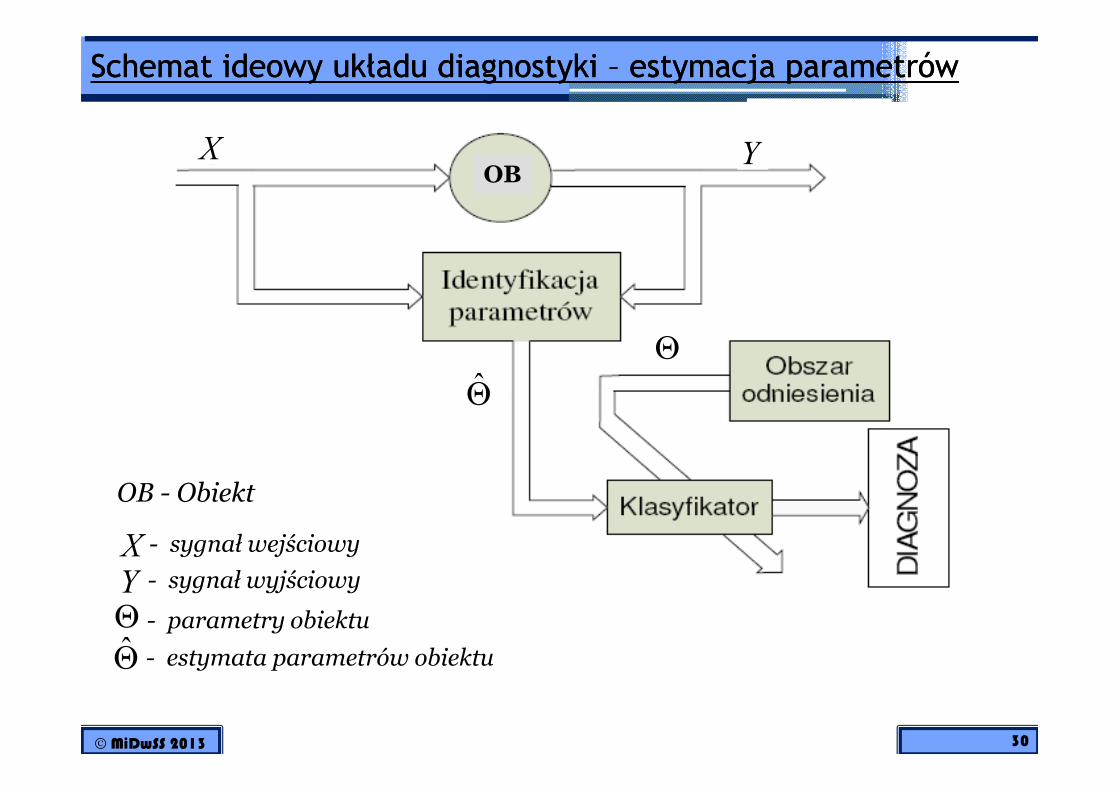
Schemat ideowy układu diagnostyki Schemat ideowy układu diagnostyki –– estymacja parametrówestymacja parametrów
MiDwSS 2013
Θ
30
OB - Obiekt
X - sygnał wejściowy
Y - sygnał wyjściowy
- parametry obiektuΘ
- estymata parametrów obiektuΘ
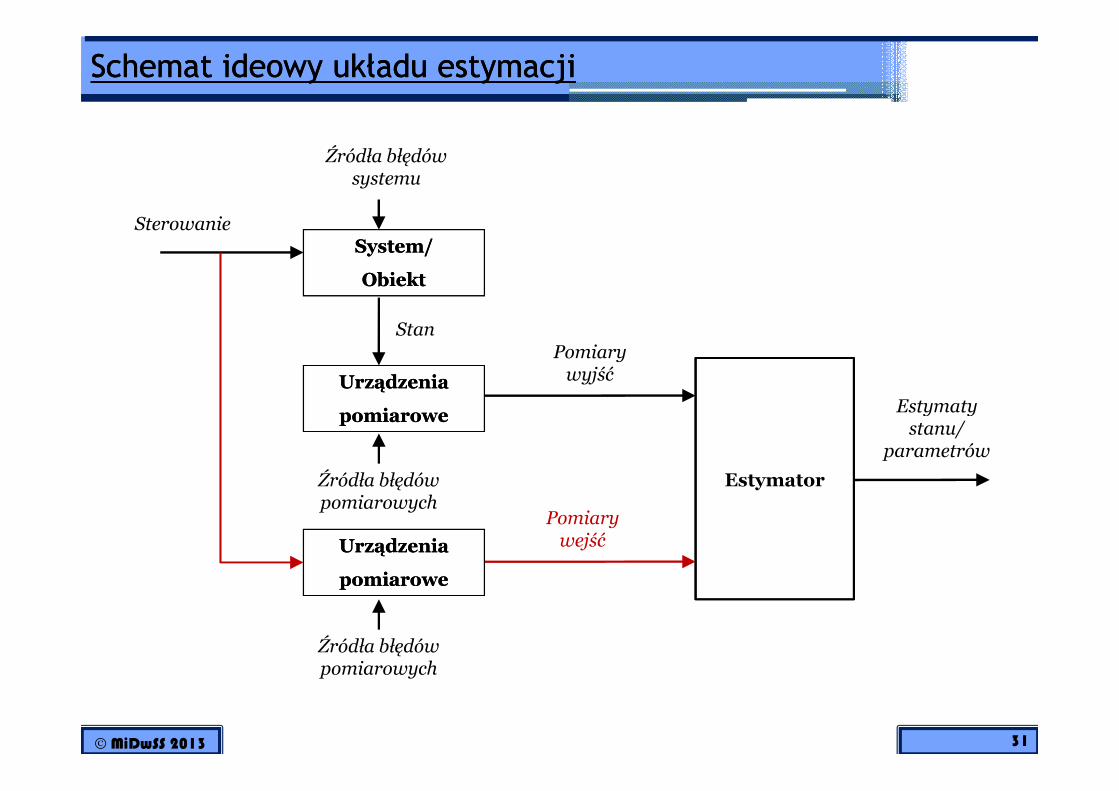
Schemat ideowy układu estymacjiSchemat ideowy układu estymacji
UrządzeniaUrządzenia
Stan
Sterowanie
Pomiary wyjść
Estymaty
Źródła błędówsystemu
System/
Obiekt
System/
Obiekt
MiDwSS 2013 31
pomiarowepomiarowe
Estymator
Źródła błędów pomiarowych
Estymaty stanu/
parametrów
Pomiary wejśćUrządzenia
pomiarowe
Urządzenia
pomiarowe
Źródła błędów pomiarowych
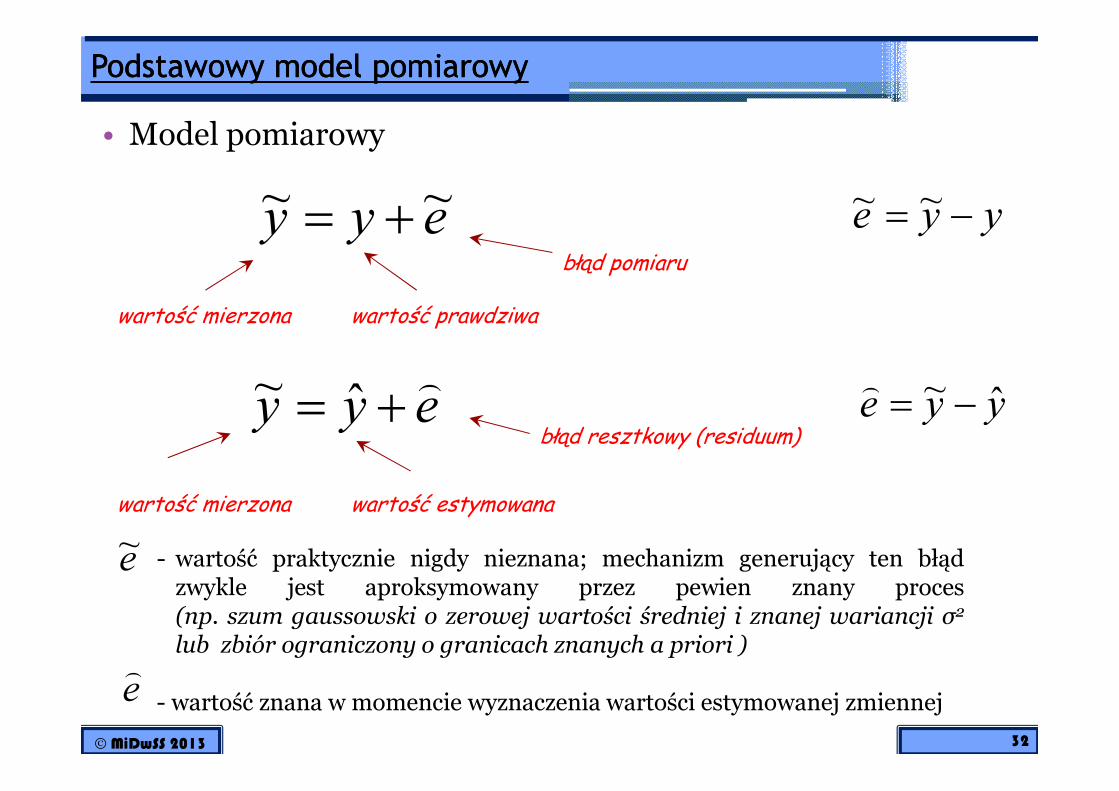
Podstawowy model pomiarowyPodstawowy model pomiarowy
• Model pomiarowy
eyy~~
+=
wartość prawdziwawartość mierzona
błąd pomiaru
eyy)
+= ˆ~
yye −=~~
yye ˆ~−=
)
MiDwSS 2013 32
eyy)
+= ˆ~
błąd resztkowy (residuum)
wartość mierzona wartość estymowana
e~
- wartość praktycznie nigdy nieznana; mechanizm generujący ten błądzwykle jest aproksymowany przez pewien znany proces(np. szum gaussowski o zerowej wartości średniej i znanej wariancji σ2
lub zbiór ograniczony o granicach znanych a priori )
e
)
- wartość znana w momencie wyznaczenia wartości estymowanej zmiennej
yye ˆ~−=
)
• ESTYMACJA PARAMETRÓW – LRS, WRLS
MiDwSS 2013 33
• ESTYMACJA PARAMETRÓW – LRS, WRLS
Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
• Idea RLS
Zakładamy, że pewien obiekt (proces) generuje wektor xskładający się z N zmiennych x(1), x(2),…, x(N)
Zakładamy niezmienność procesu Nie możemy ich zmierzyć bezpośrednio ale dysponujemy
aparaturą pomiarową, która umożliwia pomiar M-
MiDwSS 2013 34
aparaturą pomiarową, która umożliwia pomiar M-elementowego wektora z: z(1), z(2),…, z(M), M>N:
gdzie H to macierz układu pomiarowego o wymiarach MxN
v to addytywny szum pomiarowy
Estymatę x oznaczamy jako a odpowiadający jej błąd
vHxz +=
vxHz ˆˆ +=
x v
Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
• Idea RLS (cd.)
Estymata będzie tym lepsza im mniejszy będzie błąd sumy kwadratów związany z
∑=
==
M
i
i
TvvvJ
1
2ˆˆ
x
v
MiDwSS 2013 35
podstawiając:
J osiąga minimum gdy:
=i 1
( ) 0ˆˆ
=−−=∂
∂xHzH
x
J T
( ) ( )xHzxHzJT
ˆˆ −−=
Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
• Idea RLS (cd.)
Po kolejnych przekształceniach
zHxHHTT
=ˆ
( ) zHHHxTT
1
ˆ−
=
MiDwSS 2013 36
( ) zHHHxTT
ˆ =
Czy jest to rozwiązanie efektywne ?
Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
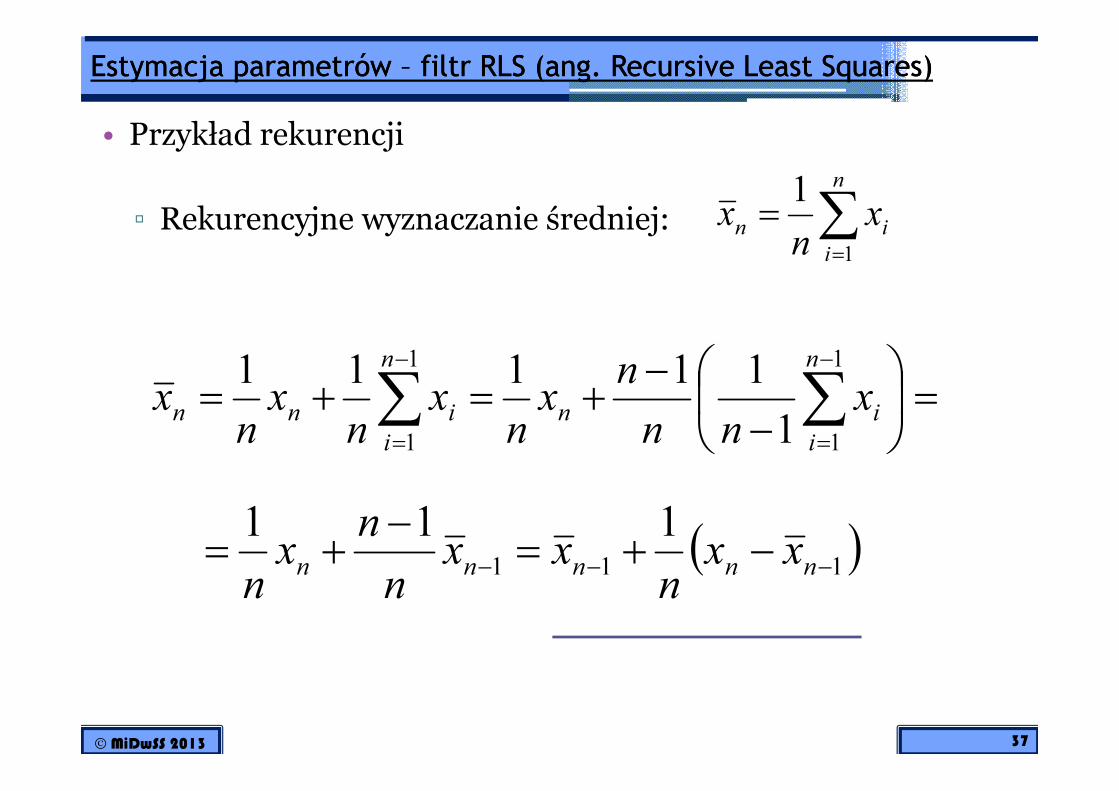
• Przykład rekurencji
Rekurencyjne wyznaczanie średniej: ∑=
=
n
i
inx
n
x
1
1
=
−
+=+= ∑∑−− 11
11111nn
x
n
xxxx
MiDwSS 2013 37
=
−
+=+= ∑∑== 11 1 i
in
i
innx
nn
x
n
x
n
x
n
x
( )111
111
−−−
−+=−
+=nnnnnxx
n
xx
n
n
x
n
Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
• Standard rekursywnej, adaptacyjnej estymaty parametrów
nowa estymata = jej prognoza + korekta
korekta = wzmocnienie * (pomiar-prognoza pomiaru)
MiDwSS 2013 38
korekta = wzmocnienie * (pomiar-prognoza pomiaru)
Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
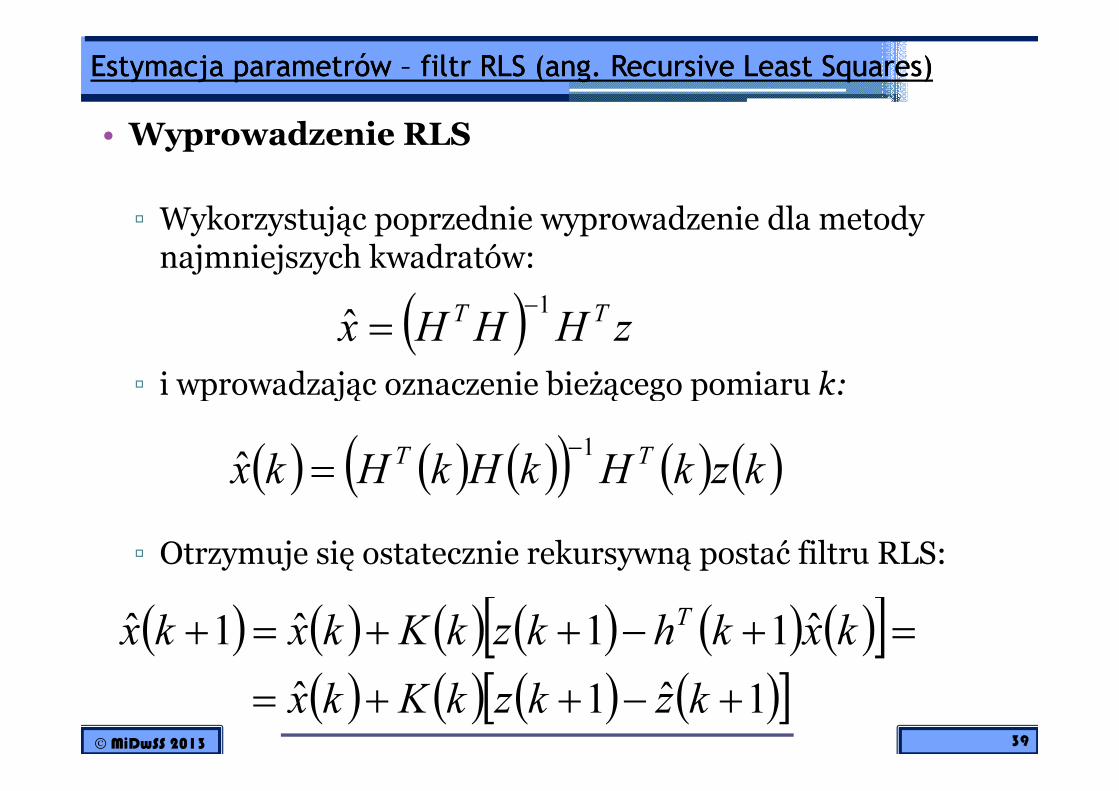
• Wyprowadzenie RLS
Wykorzystując poprzednie wyprowadzenie dla metody najmniejszych kwadratów:
i wprowadzając oznaczenie bieżącego pomiaru k:
( ) zHHHxTT
1
ˆ−
=
MiDwSS 2013 39
i wprowadzając oznaczenie bieżącego pomiaru k:
Otrzymuje się ostatecznie rekursywną postać filtru RLS:
( ) ( ) ( )( ) ( ) ( )kzkHkHkHkxTT
1
ˆ−
=
( ) ( ) ( ) ( ) ( ) ( )[ ]=+−++=+ kxkhkzkKkxkxT
ˆ11ˆ1ˆ
( ) ( ) ( ) ( )[ ]1ˆ1ˆ +−++= kzkzkKkx
Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
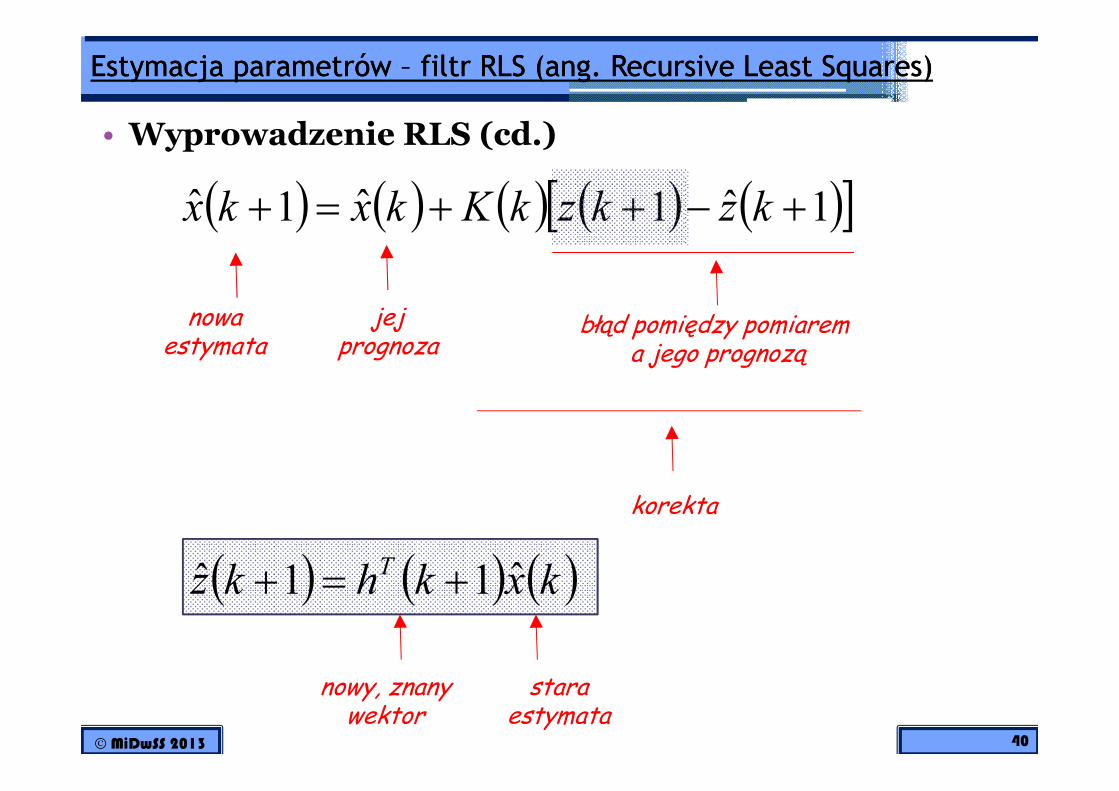
• Wyprowadzenie RLS (cd.)
( ) ( ) ( ) ( ) ( )[ ]1ˆ1ˆ1ˆ +−++=+ kzkzkKkxkx
nowaestymata
jejprognoza
błąd pomiędzy pomiarem a jego prognozą
MiDwSS 2013 40
korekta
( ) ( ) ( )kxkhkzT
ˆ11ˆ +=+
nowy, znanywektor
staraestymata
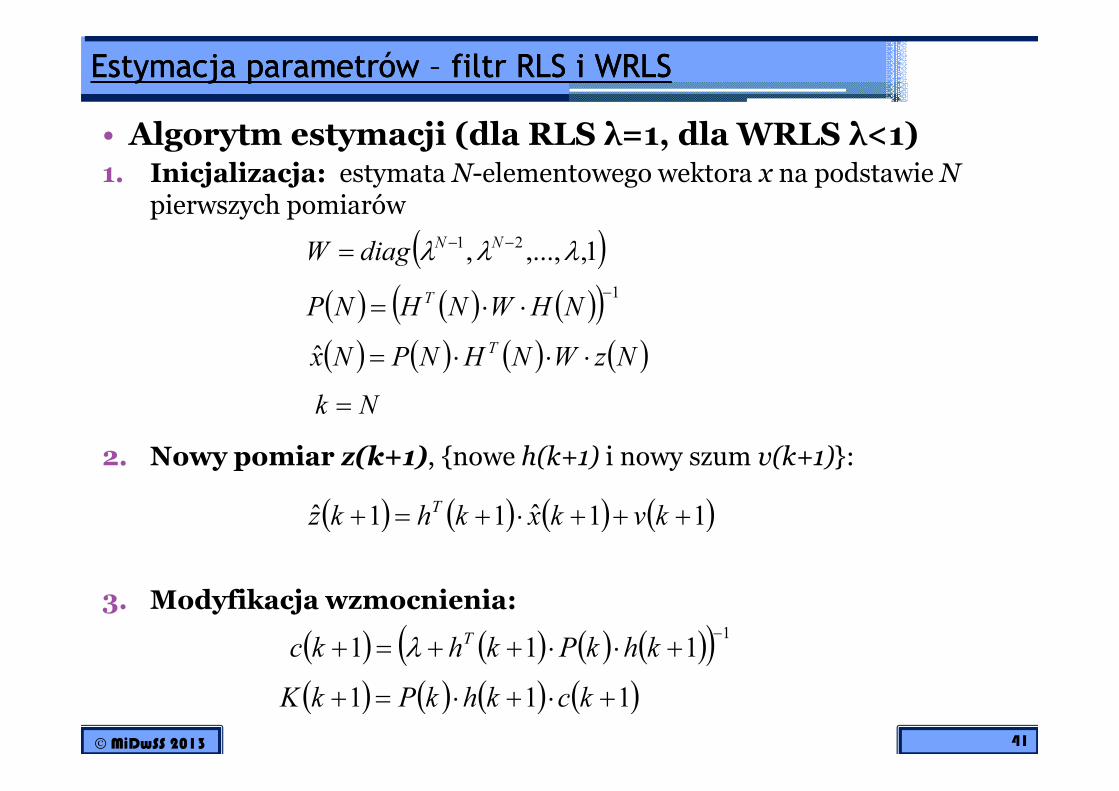
Estymacja parametrów Estymacja parametrów –– filtr RLS i WRLSfiltr RLS i WRLS
• Algorytm estymacji (dla RLS λ=1, dla WRLS λ<1)1. Inicjalizacja: estymata N-elementowego wektora x na podstawie N
pierwszych pomiarów
( )1,,...,,21
λλλ−−
=NNdiagW
( ) ( ) ( )( ) 1−
⋅⋅= NHWNHNPT
( ) ( ) ( ) ( )NzWNHNPNxT
⋅⋅⋅=ˆ
Nk =
MiDwSS 2013 41
2. Nowy pomiar z(k+1), nowe h(k+1) i nowy szum v(k+1):
3. Modyfikacja wzmocnienia:
Nk =
( ) ( ) ( ) ( )11ˆ11ˆ +++⋅+=+ kvkxkhkzT
( ) ( ) ( ) ( )( ) 1
111−
+⋅⋅++=+ khkPkhkcT
λ
( ) ( ) ( ) ( )111 +⋅+⋅=+ kckhkPkK
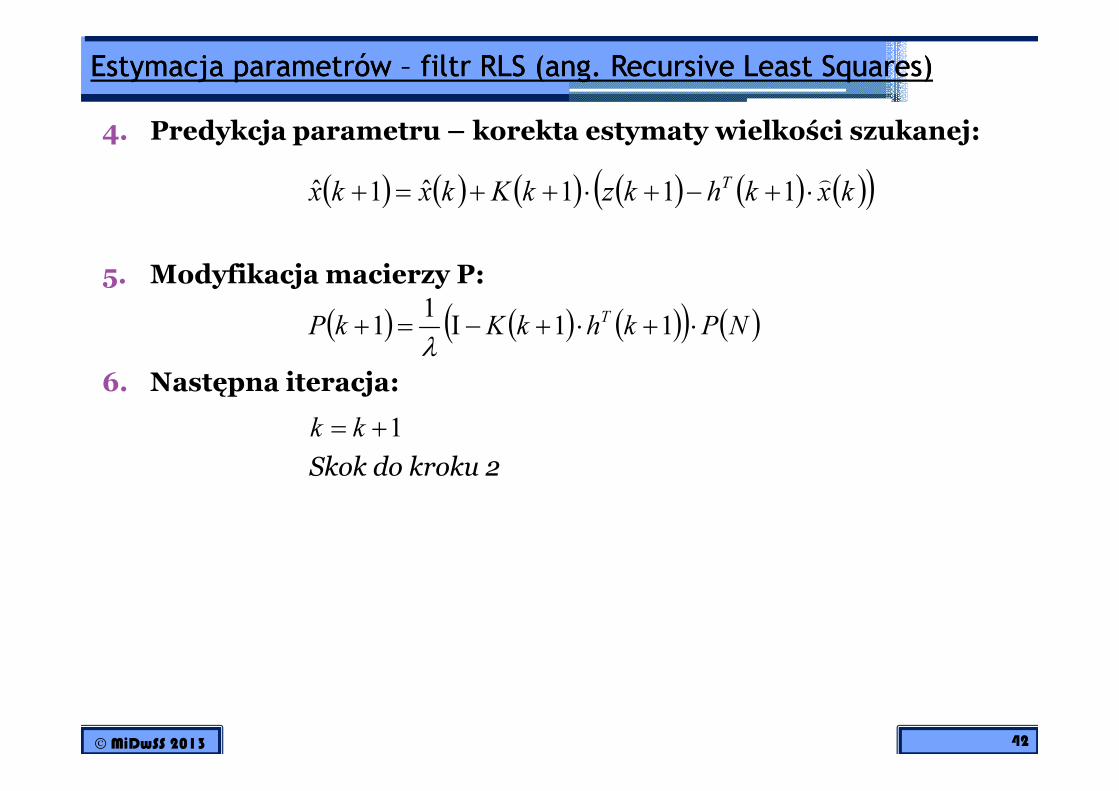
Estymacja parametrów Estymacja parametrów –– filtr RLS (ang. filtr RLS (ang. RecursiveRecursive LeastLeast SquaresSquares))
4. Predykcja parametru – korekta estymaty wielkości szukanej:
5. Modyfikacja macierzy P:
6. Następna iteracja:
( ) ( ) ( )( ) ( )NPkhkKkPT
⋅+⋅+−Ι=+ 111
1λ
( ) ( ) ( ) ( ) ( ) ( )( )kxkhkzkKkxkxT )
⋅+−+⋅++=+ 111ˆ1ˆ
MiDwSS 2013 42
6. Następna iteracja:
Skok do kroku 2
1+= kk
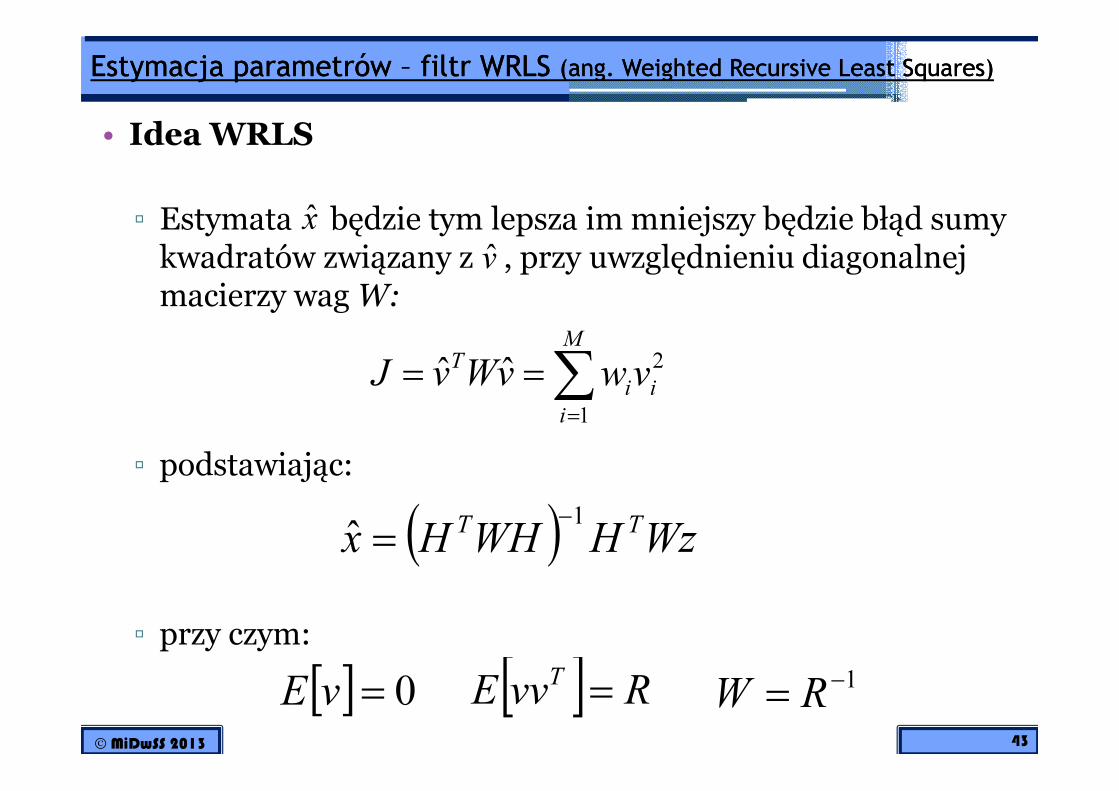
Estymacja parametrów Estymacja parametrów –– filtr WRLS filtr WRLS (ang. (ang. WeightedWeighted RecursiveRecursive LeastLeast SquaresSquares))
• Idea WRLS
Estymata będzie tym lepsza im mniejszy będzie błąd sumy kwadratów związany z , przy uwzględnieniu diagonalnej macierzy wag W:
∑==
M
ii
TvwvWvJ2
ˆˆ
x
v
MiDwSS 2013 43
podstawiając:
przy czym:
∑=i
ii
1
( ) WzHWHHxTT
1
ˆ−
=
[ ] 0=vE [ ] RvvET=
1−= RW
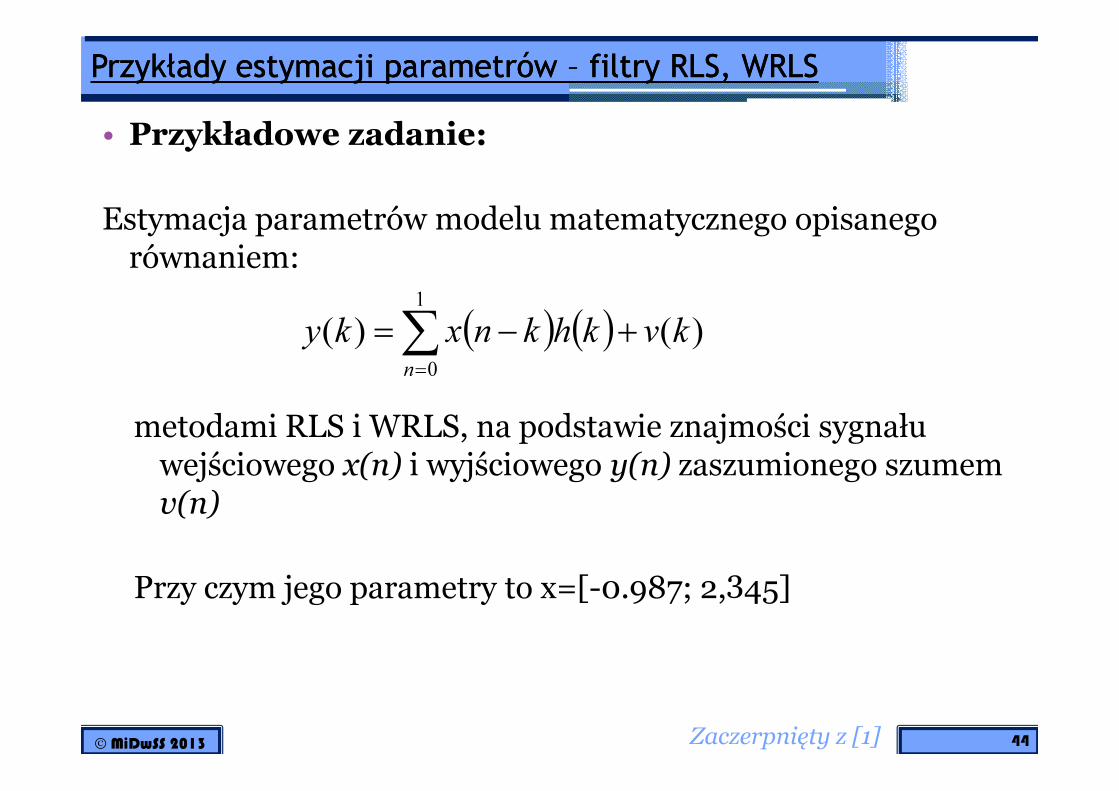
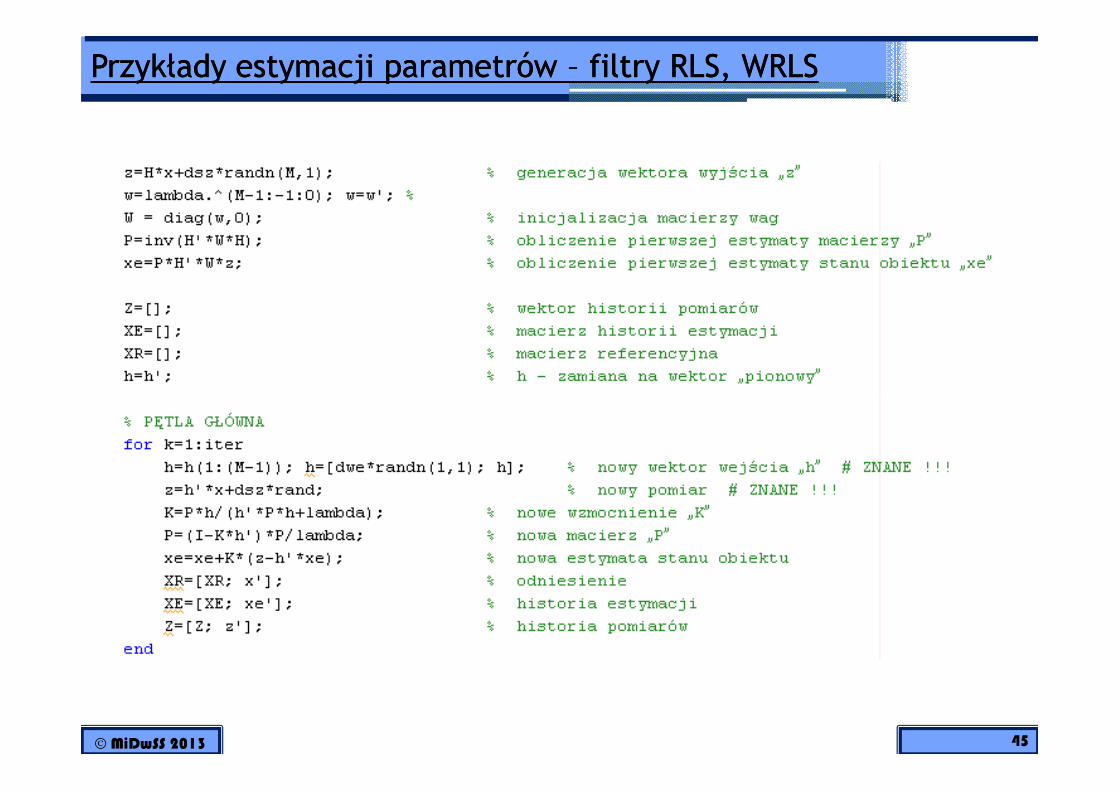
Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
• Przykładowe zadanie:
Estymacja parametrów modelu matematycznego opisanego równaniem:
( ) ( )∑=
+−=
1
0
)()(n
kvkhknxky
MiDwSS 2013 44
metodami RLS i WRLS, na podstawie znajmości sygnału wejściowego x(n) i wyjściowego y(n) zaszumionego szumem v(n)
Przy czym jego parametry to x=[-0.987; 2,345]
Zaczerpnięty z [1]
Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
MiDwSS 2013 45
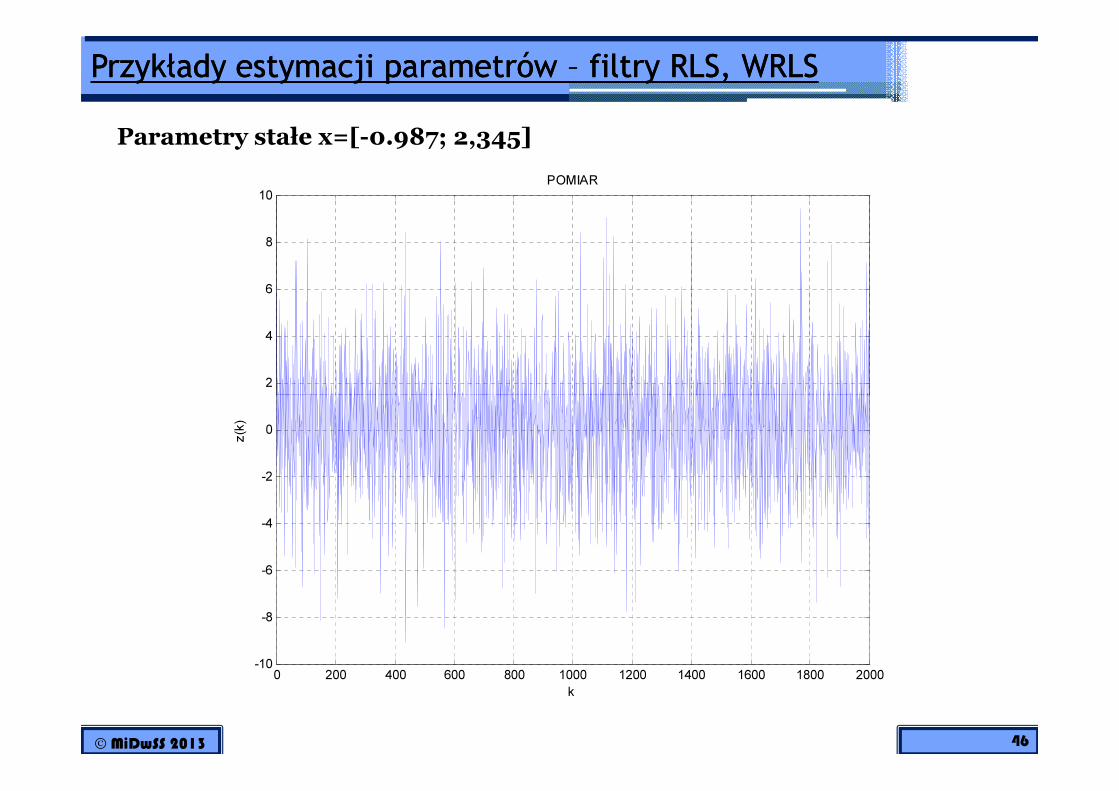
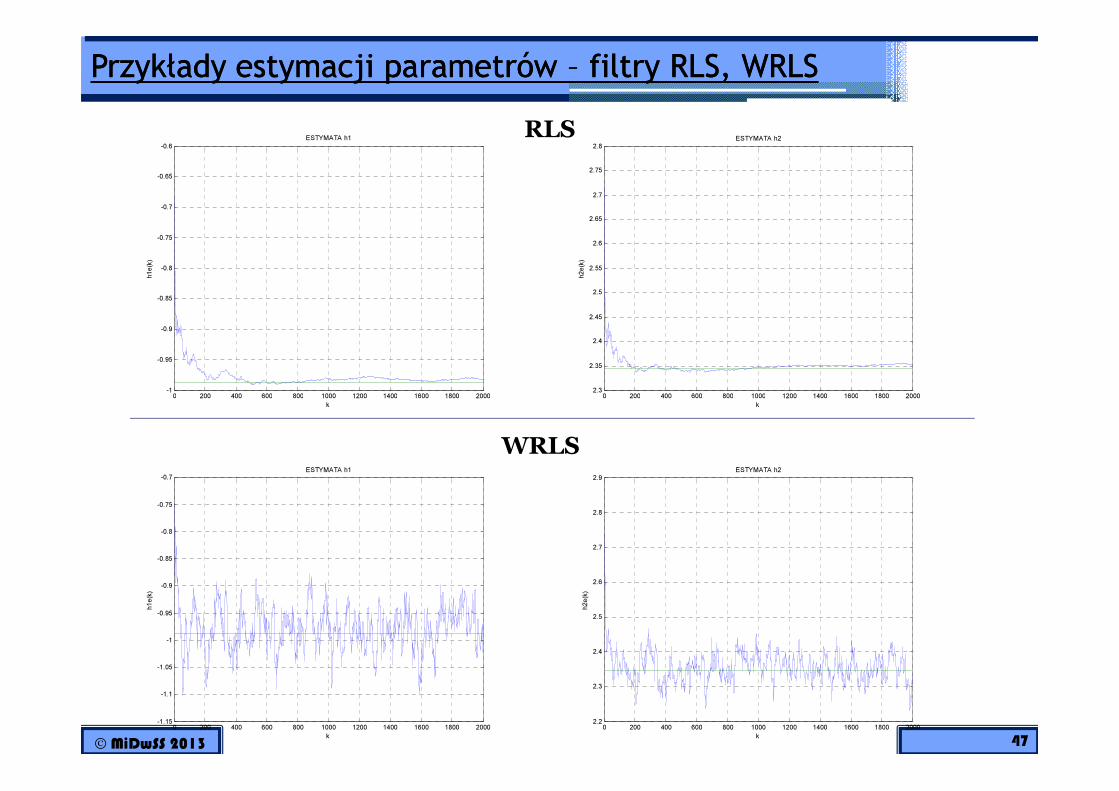
Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
Parametry stałe x=[-0.987; 2,345]
2
4
6
8
10
POMIAR
MiDwSS 2013 46
0 200 400 600 800 1000 1200 1400 1600 1800 2000-10
-8
-6
-4
-2
0
k
z(k)
Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
0 200 400 600 800 1000 1200 1400 1600 1800 2000-1
-0.95
-0.9
-0.85
-0.8
-0.75
-0.7
-0.65
-0.6
ESTYMATA h1
h1e(k)
0 200 400 600 800 1000 1200 1400 1600 1800 20002.3
2.35
2.4
2.45
2.5
2.55
2.6
2.65
2.7
2.75
2.8
ESTYMATA h2
h2e(k)
RLS
MiDwSS 2013 47
0 200 400 600 800 1000 1200 1400 1600 1800 20002.2
2.3
2.4
2.5
2.6
2.7
2.8
2.9
ESTYMATA h2
k
h2e(k)
0 200 400 600 800 1000 1200 1400 1600 1800 2000
k
0 200 400 600 800 1000 1200 1400 1600 1800 2000
k
0 200 400 600 800 1000 1200 1400 1600 1800 2000-1.15
-1.1
-1.05
-1
-0.95
-0.9
-0.85
-0.8
-0.75
-0.7
ESTYMATA h1
k
h1e(k)
WRLS
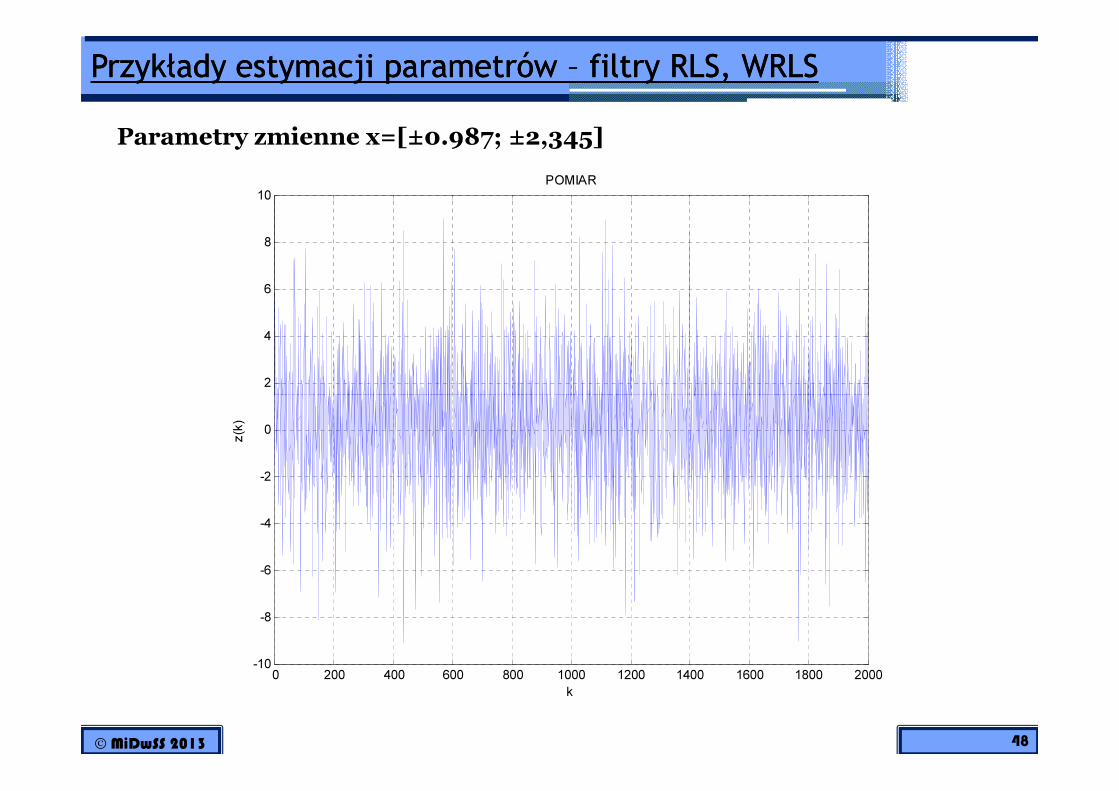
Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
2
4
6
8
10
POMIAR
Parametry zmienne x=[±0.987; ±2,345]
MiDwSS 2013 48
0 200 400 600 800 1000 1200 1400 1600 1800 2000-10
-8
-6
-4
-2
0
k
z(k)
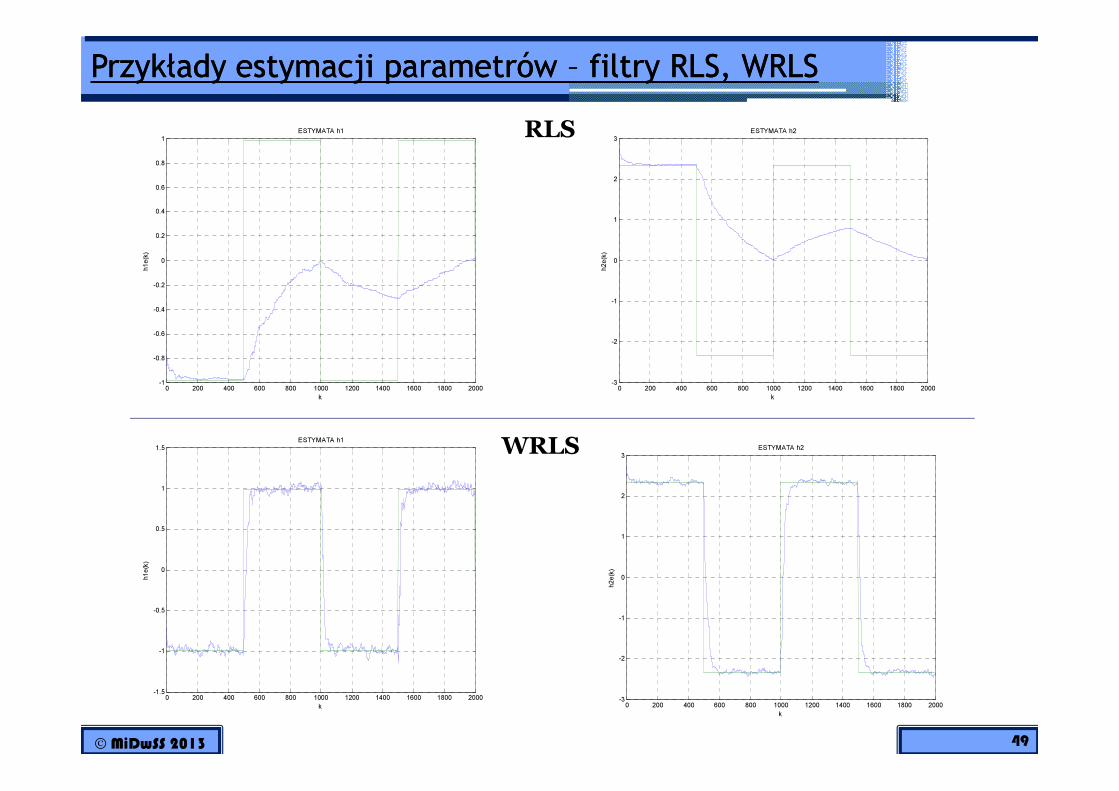
Przykłady estymacji parametrów Przykłady estymacji parametrów –– filtry RLS, WRLSfiltry RLS, WRLS
RLS
0 200 400 600 800 1000 1200 1400 1600 1800 2000-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
ESTYMATA h1
k
h1e(k)
0 200 400 600 800 1000 1200 1400 1600 1800 2000-3
-2
-1
0
1
2
3
ESTYMATA h2
k
h2e(k)
MiDwSS 2013 49
WRLS
k k
0 200 400 600 800 1000 1200 1400 1600 1800 2000-3
-2
-1
0
1
2
3
ESTYMATA h2
k
h2e(k)
0 200 400 600 800 1000 1200 1400 1600 1800 2000-1.5
-1
-0.5
0
0.5
1
1.5
ESTYMATA h1
k
h1e(k)
Nieliniowe filtry RLS, WRLSNieliniowe filtry RLS, WRLS
Bardziej szczegółowe informacje na temat liniowych i nieliniowych filtrów RLS i WRLS można znaleźć
MiDwSS 2013 50
nieliniowych filtrów RLS i WRLS można znaleźć między innymi w materiałach wykładowych z
przedmiotu: „Modelowanie i Identyfikacja”
(wykłady 3, 4 i 5, sem. I studiów stacjonarnych I stopnia)
• ESTYMACJA WYJŚĆ/STANU – Obserwator Luenbergera
MiDwSS 2013 51
• ESTYMACJA WYJŚĆ/STANU – Obserwator LuenbergeraKalmana, Rozszerzony Filtr Kalamna
OB
OB
Y)
YU
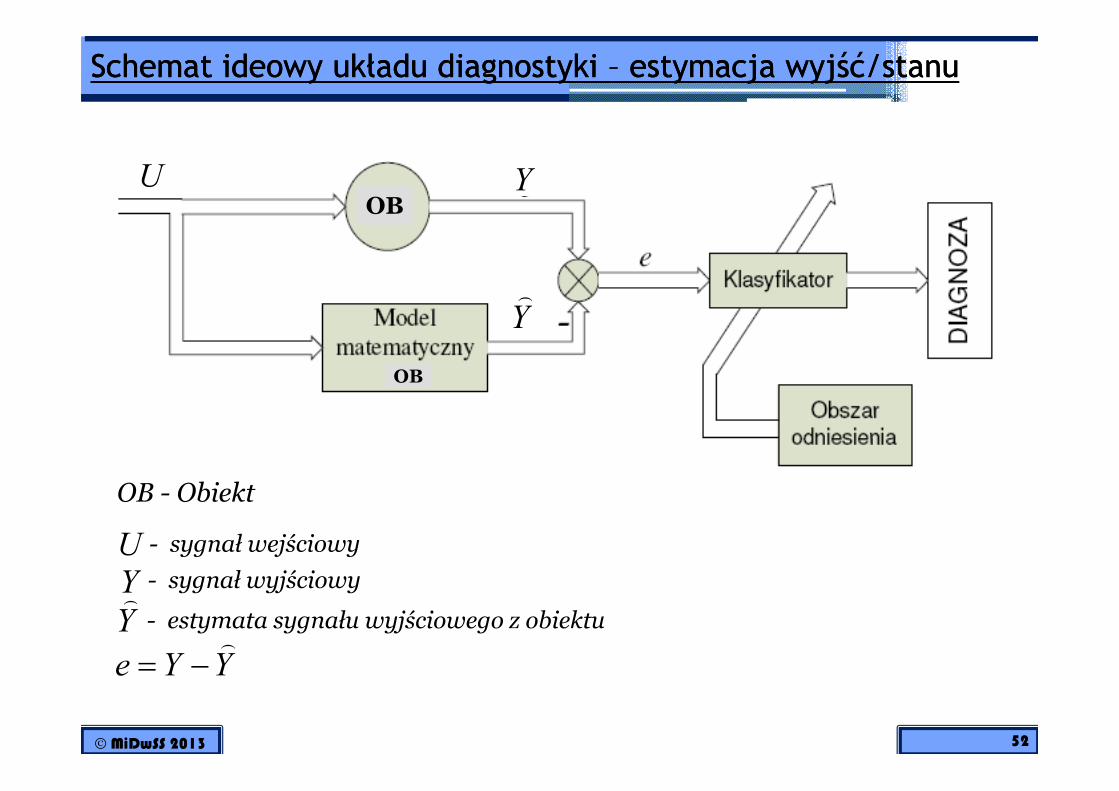
Schemat ideowy układu diagnostyki Schemat ideowy układu diagnostyki –– estymacja wyjść/stanuestymacja wyjść/stanu
MiDwSS 2013 52
OB - Obiekt
U - sygnał wejściowy
Y - sygnał wyjściowy
- estymata sygnału wyjściowego z obiektuY)
YYe)
−=
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea obserwatora Luenbergera
wymaga znajomości wszystkich zmiennych stanu, wymagane są „idealne” czujniki pomiarowe o
nieograniczonym paśmie znane wszystkie parametry systemu (opis w przestrzeni
stanu, macierze A, B, C, D)
MiDwSS 2013 53
stanu, macierze A, B, C, D)
• Obserwator Luenbergera rzędu zredukowanego
Więcej szczegółowych informacji o obserwatorach pełnym i zredukowanym Luenbergera można znaleźć między innymi w materiałach wykładowych z przedmiotu: „Teoria Sterowania”
(sem. I studiów stacjonarnych I stopnia)
Estymacja wyjść/stanu Estymacja wyjść/stanu
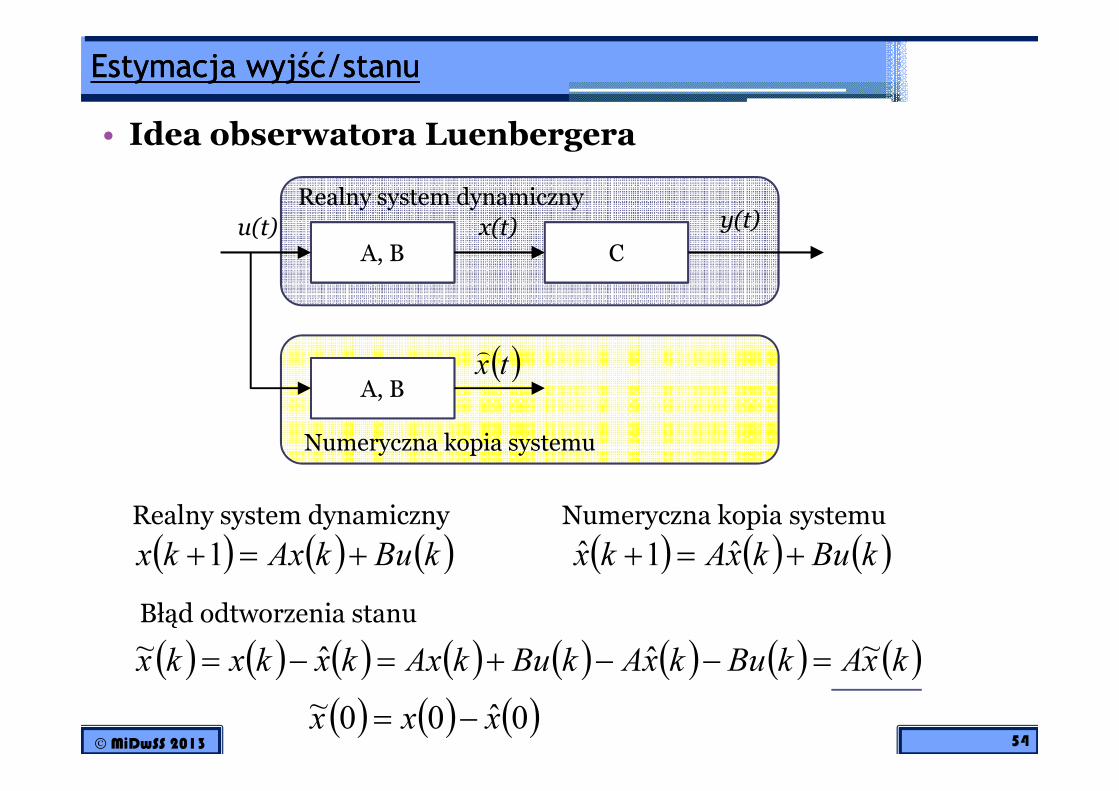
• Idea obserwatora Luenbergera
A, B C
A, B
u(t) x(t) y(t)
( )tx)
Realny system dynamiczny
MiDwSS 2013 54
A, B
Numeryczna kopia systemu
( ) ( ) ( )kBukAxkx +=+1 ( ) ( ) ( )kBukxAkx +=+ ˆ1ˆ
Realny system dynamiczny Numeryczna kopia systemu
Błąd odtworzenia stanu
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )kxAkBukxAkBukAxkxkxkx~
ˆˆ~
=−−+=−=
( ) ( ) ( )0ˆ00~
xxx −=
Estymacja wyjść/stanu Estymacja wyjść/stanu
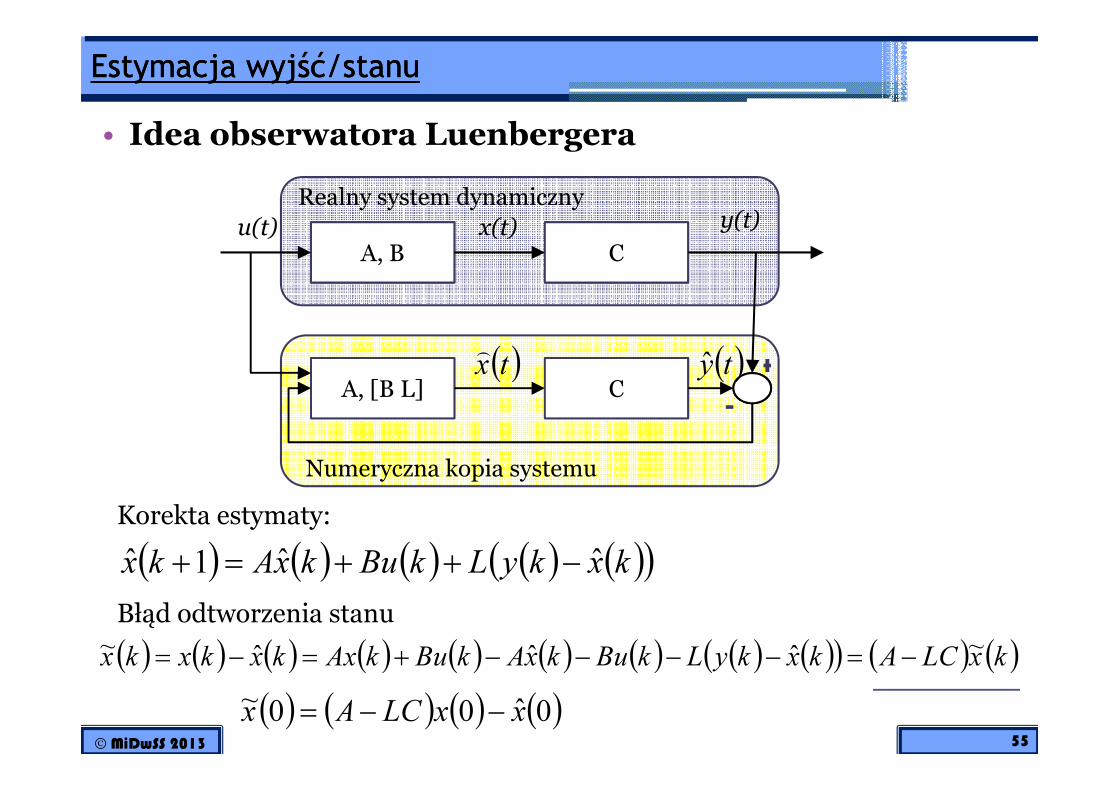
• Idea obserwatora Luenbergera
A, B C
A, [B L]
u(t) x(t) y(t)
( )tx)
Realny system dynamiczny
C( )ty
MiDwSS 2013 55
A, [B L]
Numeryczna kopia systemu
( ) ( ) ( ) ( ) ( )( )kxkyLkBukxAkx ˆˆ1ˆ −++=+
Korekta estymaty:
C
Błąd odtworzenia stanu
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( )kxLCAkxkyLkBukxAkBukAxkxkxkx ~ˆˆˆ
~−=−−−−+=−=
( ) ( ) ( ) ( )0ˆ00~
xxLCAx −−=
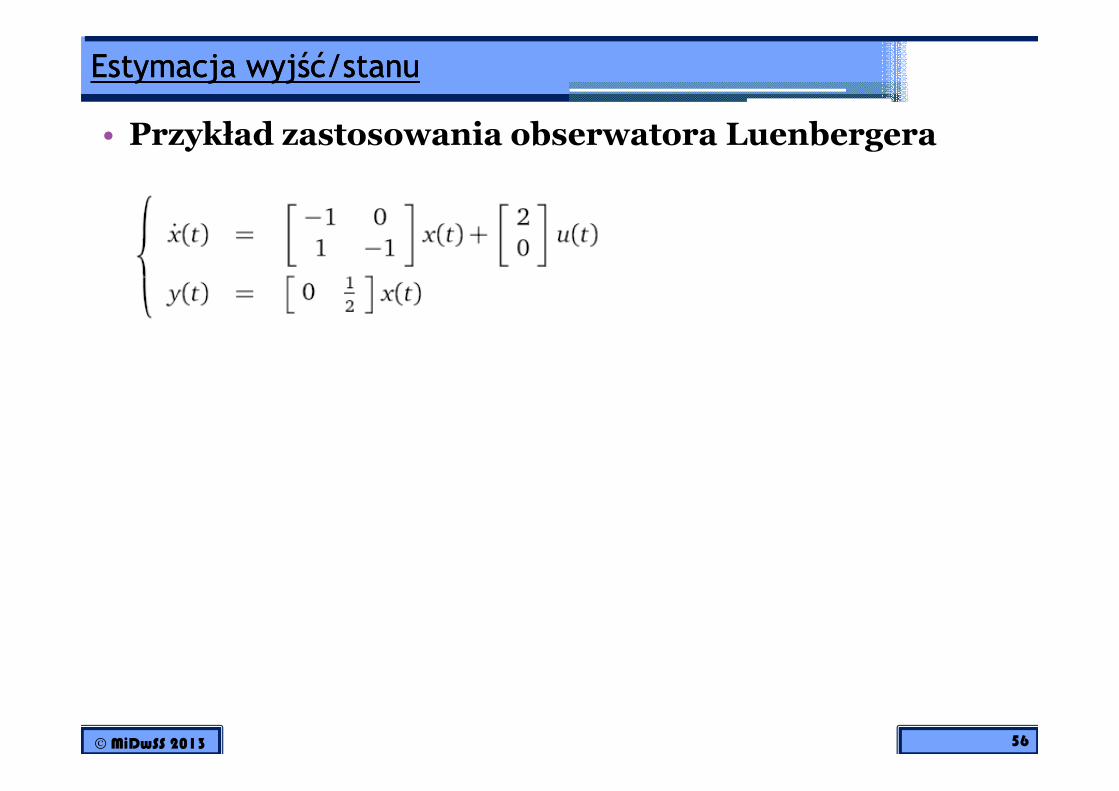
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład zastosowania obserwatora Luenbergera
MiDwSS 2013 56
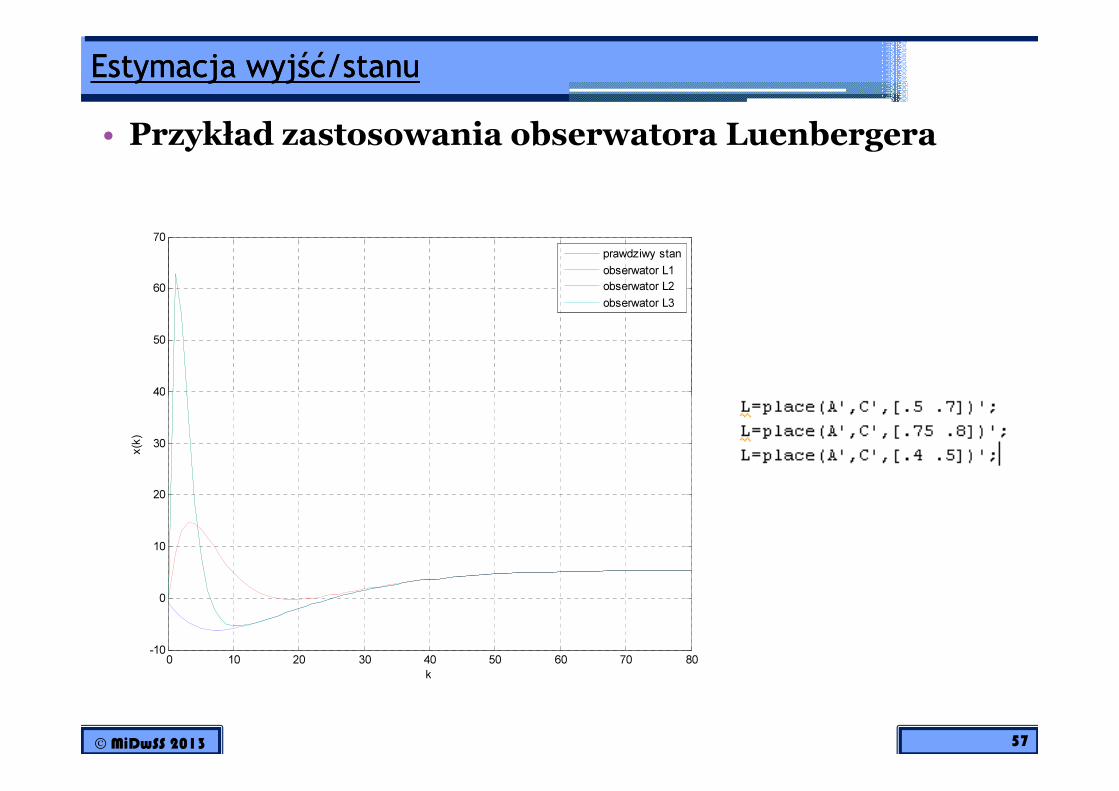
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład zastosowania obserwatora Luenbergera
40
50
60
70
prawdziwy stan
obserwator L1
obserwator L2
obserwator L3
MiDwSS 2013 57
0 10 20 30 40 50 60 70 80-10
0
10
20
30
40
k
x(k)
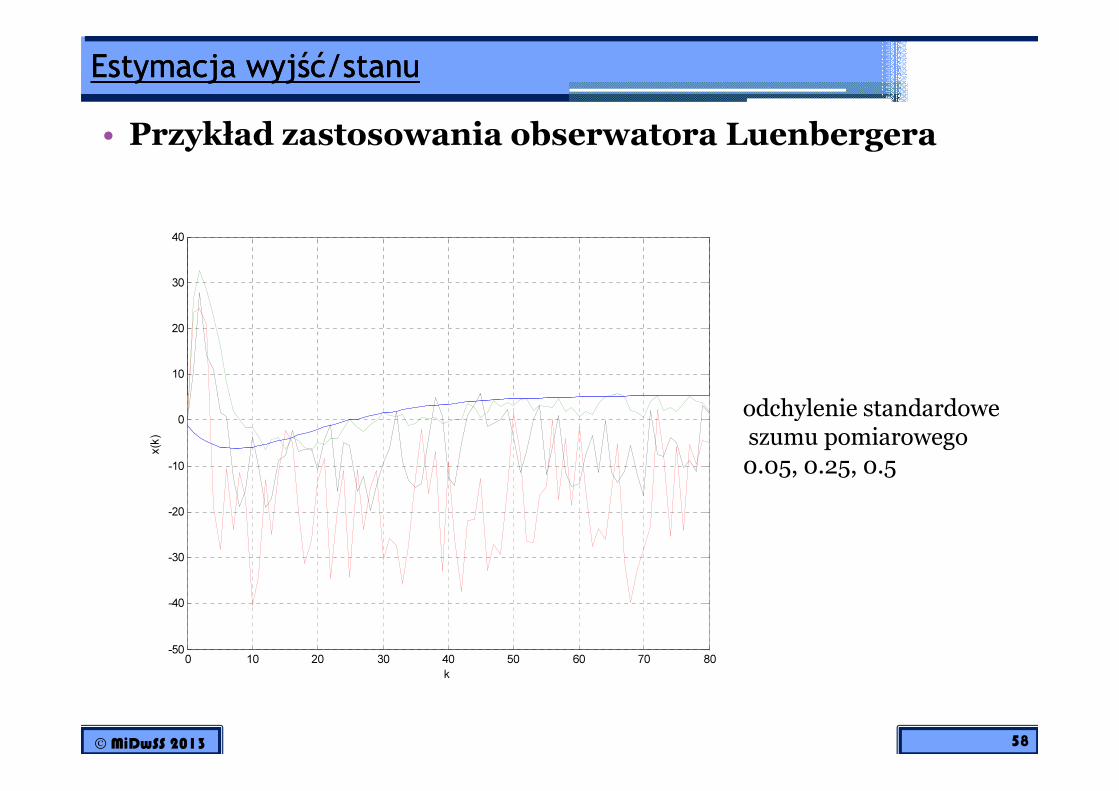
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład zastosowania obserwatora Luenbergera
10
20
30
40
odchylenie standardowe
MiDwSS 2013 58
0 10 20 30 40 50 60 70 80-50
-40
-30
-20
-10
0
k
x(k)
odchylenie standardoweszumu pomiarowego0.05, 0.25, 0.5
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (estymacja minimalno-średniokwadratowa,
MMS, Minimum Mean Square)
• Filtr Kalmana stosuje się do estymacji wartości obserwowanych zmiennych, minimalizując błędu estymacji stanu w sensie statystycznym.
• Filtr Kalmana uwzględnia informacje o procesie z dwóch źródeł:
xxx ˆ~
−=
MiDwSS 2013 59
• Filtr Kalmana uwzględnia informacje o procesie z dwóch źródeł: urządzenia pomiarowe (wiedza a posteriori), model systemu (wiedza a priori).
• Filtr Kalmana działa zgodnie ze schematem predyktor-korektor
Rudolph. E. Kalman, "A New Approach to Linear Filtering and Prediction Problems", Trasactions of the ASME: Journal of Basic Engineering,
vol 82, Series D, pp. 35-45, 1960.
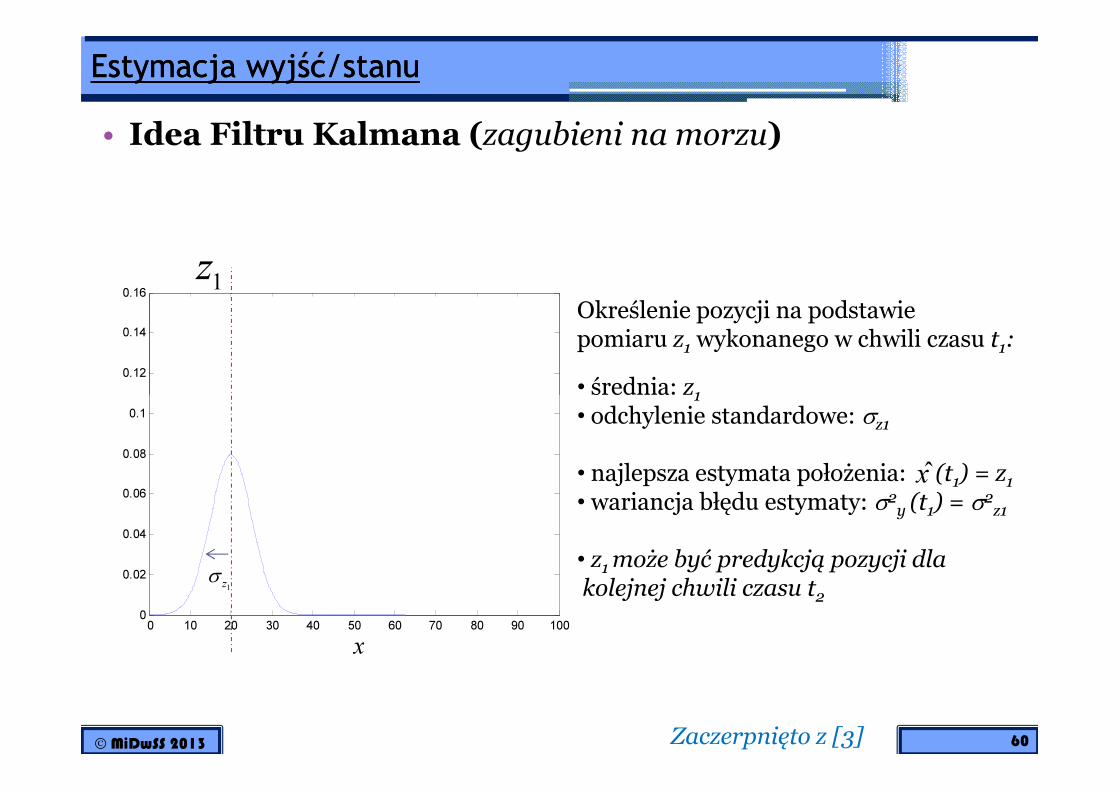
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (zagubieni na morzu)
0.12
0.14
0.16
Określenie pozycji na podstawiepomiaru z1 wykonanego w chwili czasu t1:
• średnia: z1
1z
MiDwSS 2013 60Zaczerpnięto z [3]
0 10 20 30 40 50 60 70 80 90 1000
0.02
0.04
0.06
0.08
0.1
• średnia: z1
• odchylenie standardowe: σz1
• najlepsza estymata położenia: (t1) = z1
• wariancja błędu estymaty: σ2y (t1) = σ2
z1
• z1 może być predykcją pozycji dla kolejnej chwili czasu t2
x
x
1zσ
Estymacja wyjść/stanu Estymacja wyjść/stanu
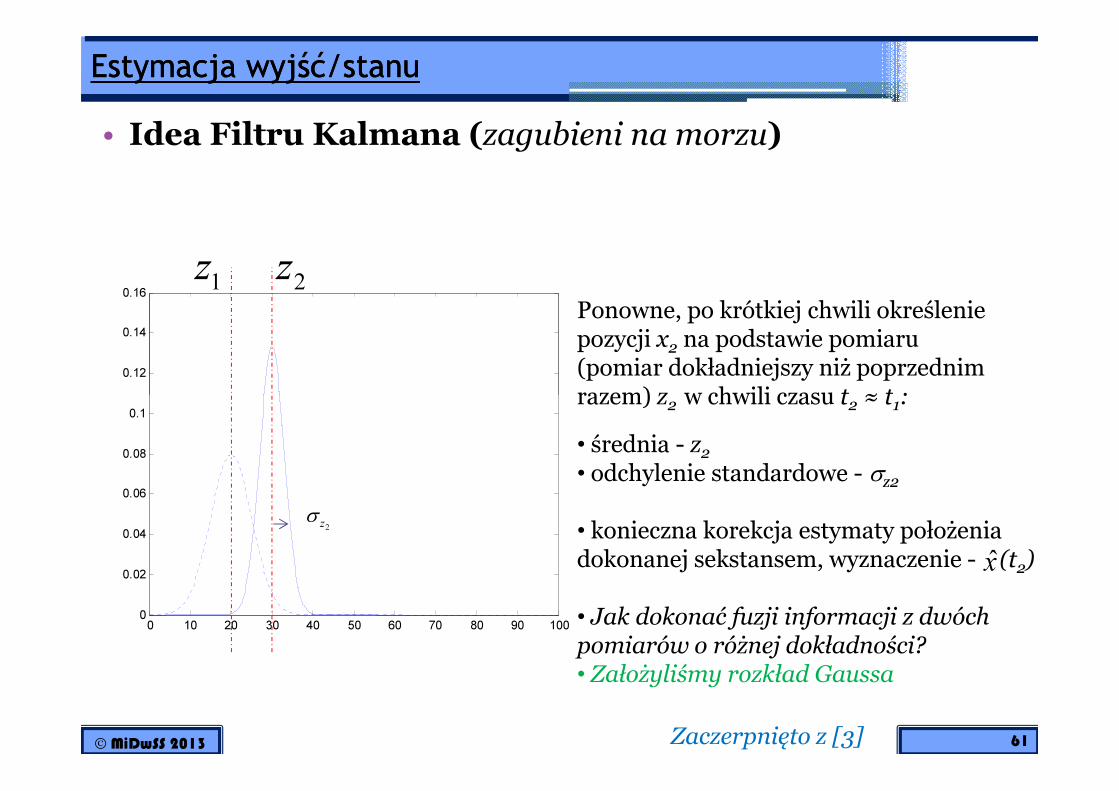
• Idea Filtru Kalmana (zagubieni na morzu)
Ponowne, po krótkiej chwili określeniepozycji x2 na podstawie pomiaru (pomiar dokładniejszy niż poprzednim razem) z2 w chwili czasu t2 ≈ t1:
0.12
0.14
0.161z
2z
MiDwSS 2013 61
razem) z2 w chwili czasu t2 ≈ t1:
• średnia - z2
• odchylenie standardowe - σz2
• konieczna korekcja estymaty położeniadokonanej sekstansem, wyznaczenie - (t2)
• Jak dokonać fuzji informacji z dwóch pomiarów o różnej dokładności?• Założyliśmy rozkład Gaussa
0 10 20 30 40 50 60 70 80 90 1000
0.02
0.04
0.06
0.08
0.1
x
Zaczerpnięto z [3]
2zσ
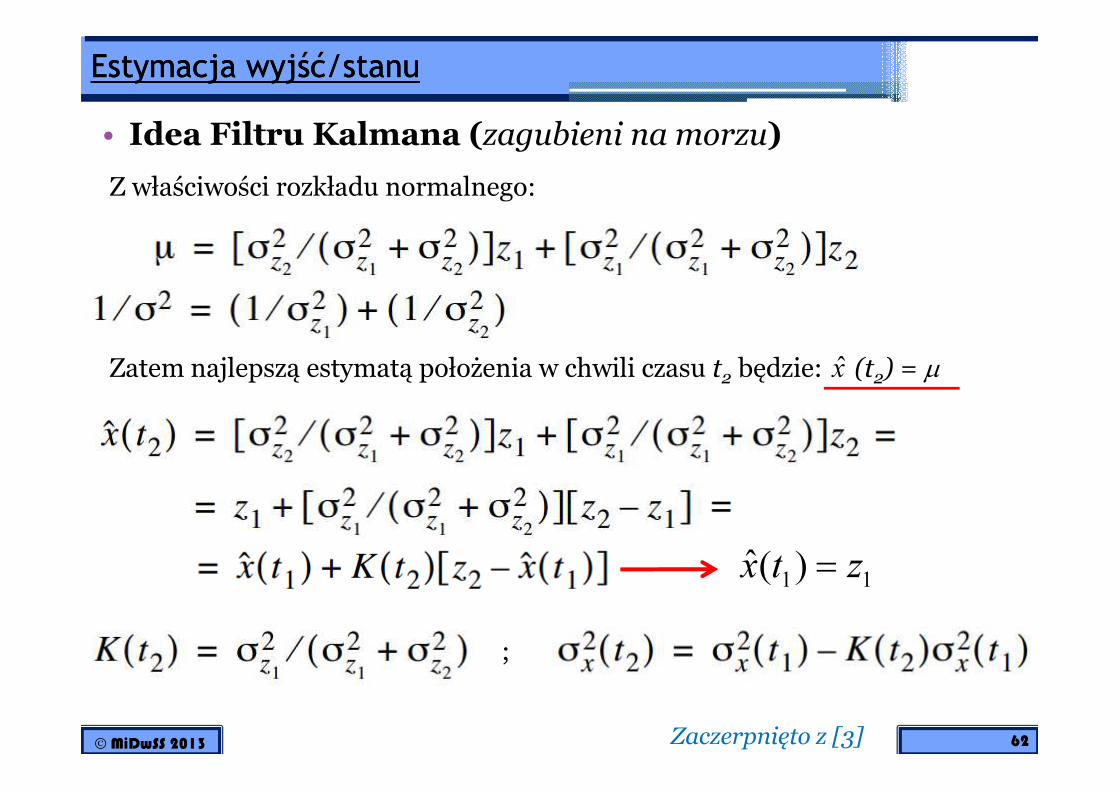
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (zagubieni na morzu)
Zatem najlepszą estymatą położenia w chwili czasu t2
będzie: (t2) = µx
Z właściwości rozkładu normalnego:
MiDwSS 2013 62
;
Zaczerpnięto z [3]
11)(ˆ ztx =
0.12
0.14
0.16
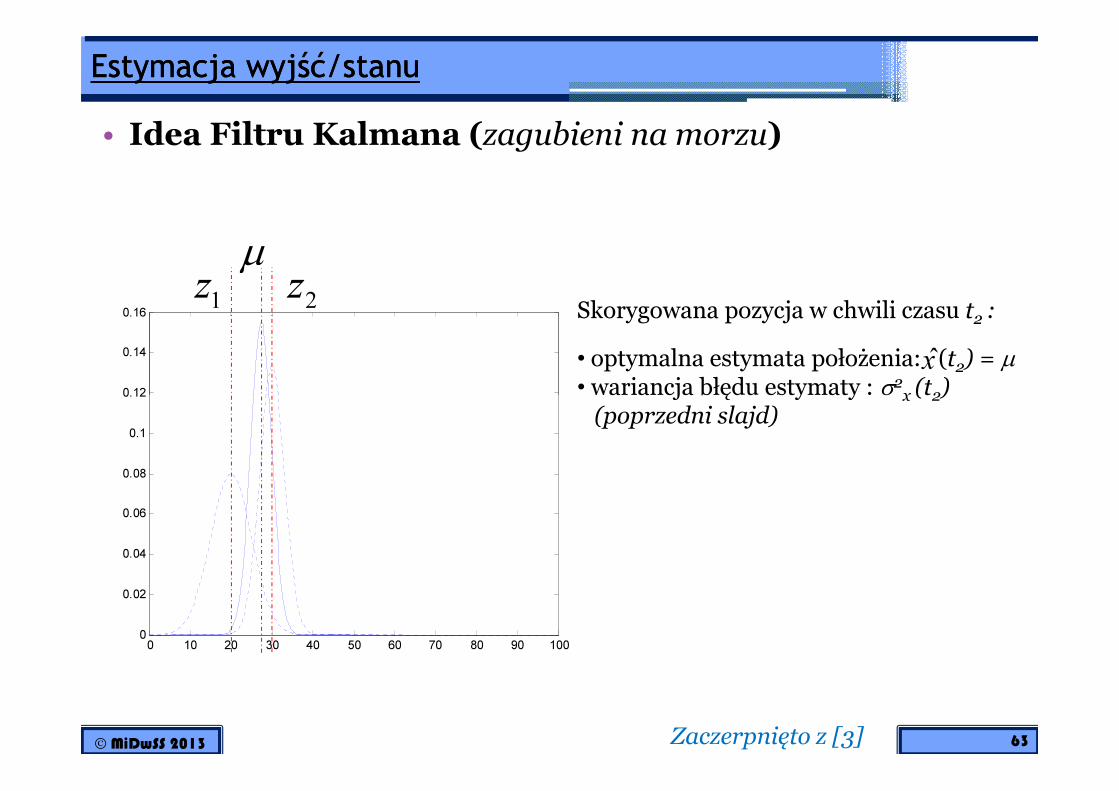
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (zagubieni na morzu)
Skorygowana pozycja w chwili czasu t2 :
• optymalna estymata położenia: (t2) = µ
• wariancja błędu estymaty : σ2x (t2)
1z
2z
µ
x
MiDwSS 2013
0 10 20 30 40 50 60 70 80 90 1000
0.02
0.04
0.06
0.08
0.1
0.12
63
• wariancja błędu estymaty : σ x (t2) (poprzedni slajd)
Zaczerpnięto z [3]
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana
Działanie zgodnie ze schematem Predykcja-Korekcja
Optymalna estymata = jej prognoza + korekta
MiDwSS 2013 64
Optymalna estymata = jej prognoza + korekta
korekta = wzmocnienie Kalmana * (pomiar - prognoza pomiaru)
Wariancja estymaty = Wariancja prognozy*(1 - wzmocnienie Kalmana)
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (estymacja minimalno-średniokwadratowa,
MMS, Minimum Mean Square)
• Minimalizuje się funkcję jakości w postaci:
( ) ( )[ ]xxxxEJT
ˆˆ −⋅−=
MiDwSS 2013 65
• Rozważa się model:
proces dynamiczny, niestacjonarny
( ) ( ) ( ) ( )( ) ( ) ( )
+++⋅=+
⋅+⋅+⋅=+
111
1
kvkxHkz
kwGkuBkxAkx - model procesu
- model pomiaru
Szczegółowe informacje można znaleźć np. w [2]
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (estymacja MMS)
MiDwSS 2013 66
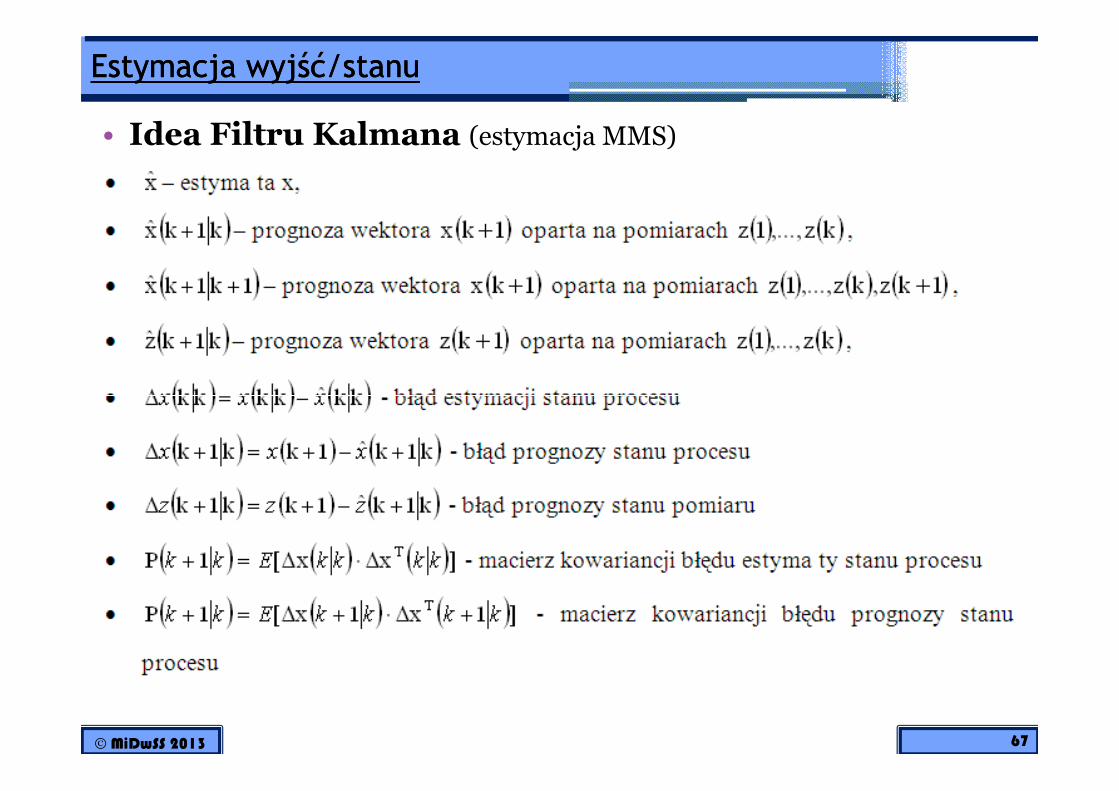
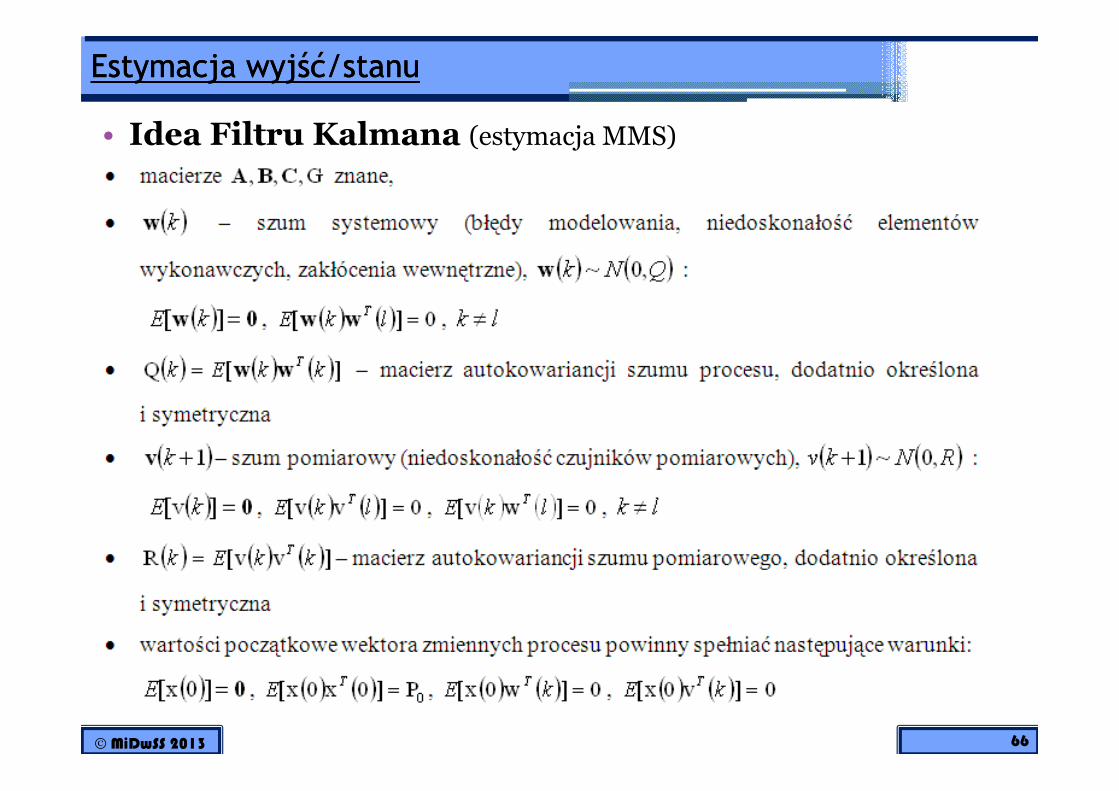
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalmana (estymacja MMS)
MiDwSS 2013 67
Estymacja wyjść/stanu Estymacja wyjść/stanu
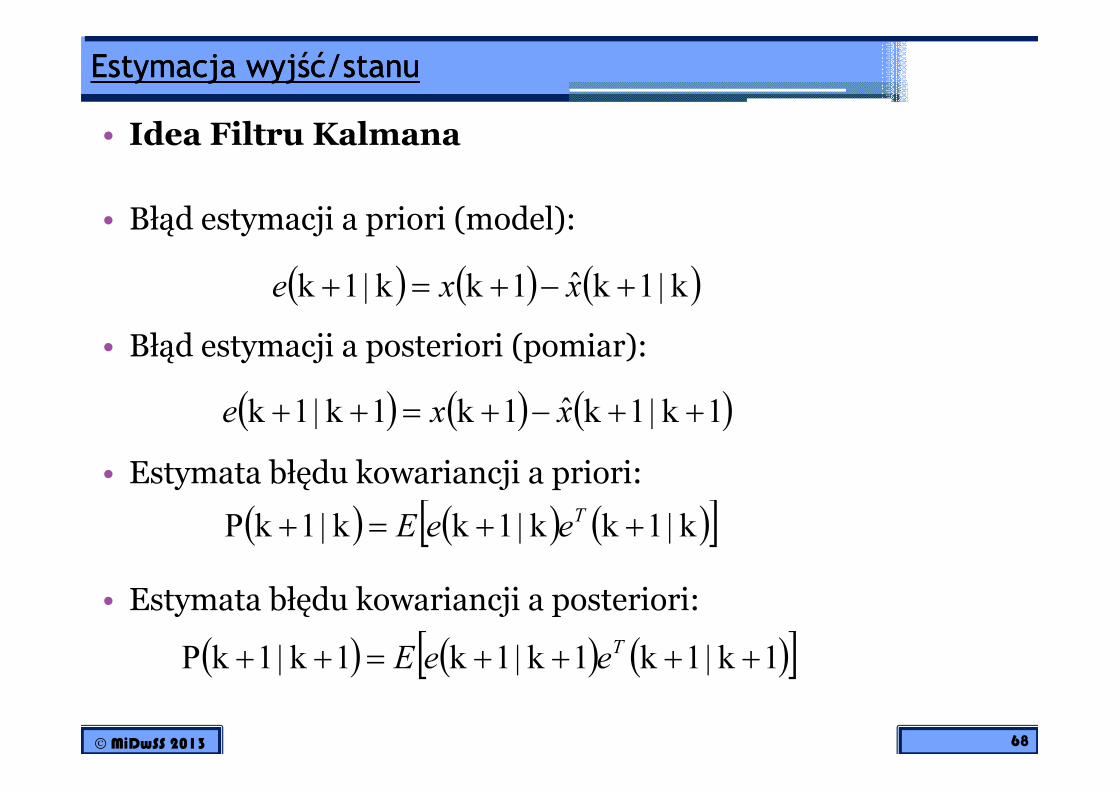
• Idea Filtru Kalmana
• Błąd estymacji a priori (model):
• Błąd estymacji a posteriori (pomiar):
( ) ( ) ( )k|1kˆ1kk|1k +−+=+ xxe
( ) ( ) ( )1k|1kˆ1k1k|1k ++−+=++ xxe
MiDwSS 2013 68
• Estymata błędu kowariancji a priori:
• Estymata błędu kowariancji a posteriori:
( ) ( ) ( )1k|1kˆ1k1k|1k ++−+=++ xxe
( ) ( ) ( )[ ]k|1kk|1kk|1kP ++=+TeeE
( ) ( ) ( )[ ]1k|1k1k|1k1k|1kP ++++=++TeeE

Estymacja wyjść/stanu Estymacja wyjść/stanu
• Idea Filtru Kalman
• Celem filtru Kalmana jest wyznaczenie estymaty a posteriori jako liniowej kombinacji estymaty a priori
i ważonej różnicy pomiędzy aktualnym pomiarem a predykcją pomiaru :
( )1k|1kˆ ++x ( )k|1kˆ +x
( )1k +z
( )k|1kˆ +⋅ xH
( ) ( ) ( ) ( ) ( )( )k1kxH1k1kKk1kx1k1kx +⋅−+⋅+++=++ z
MiDwSS 2013 69
• Wzmocnienie Kalmana dobiera się tak aby estymacja kowariancji błędu aposteriori była jak najmniejsza
( ) ( ) ( ) ( ) ( )( )k1kxH1k1kKk1kx1k1kx +⋅−+⋅+++=++ z
( )1k +K
( )1k|1kP ++
( ) ( ) ( )[ ] 1TT
RHk1kPHHk1kP1kK−
+⋅+⋅⋅⋅+=+
Estymacja wyjść/stanu Estymacja wyjść/stanu
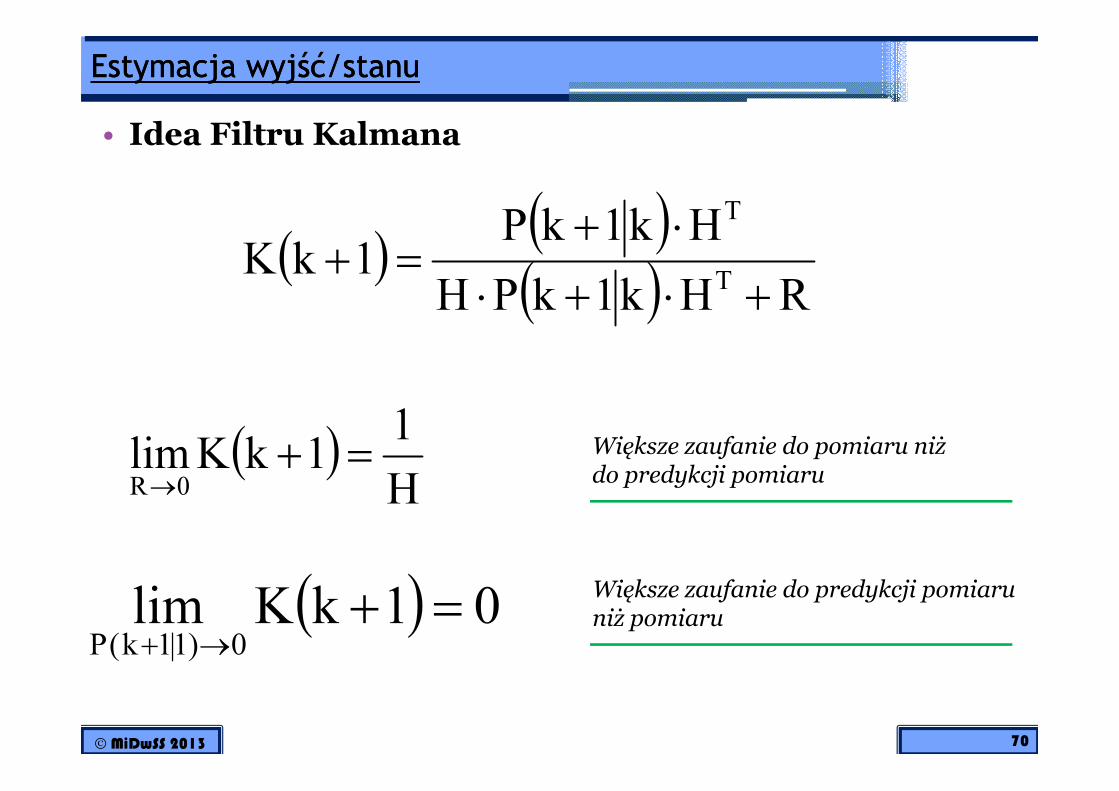
• Idea Filtru Kalmana
( )( )( ) RHk1kPH
Hk1kP1kK
T
T
+⋅+⋅
⋅+
=+
MiDwSS 2013 70
( )H
11kKlim
0R
=+→
( ) 01kKlim0)1|1k(P
=+→+
Większe zaufanie do pomiaru niżdo predykcji pomiaru
Większe zaufanie do predykcji pomiaru niż pomiaru
Estymacja wyjść/stanu Estymacja wyjść/stanu
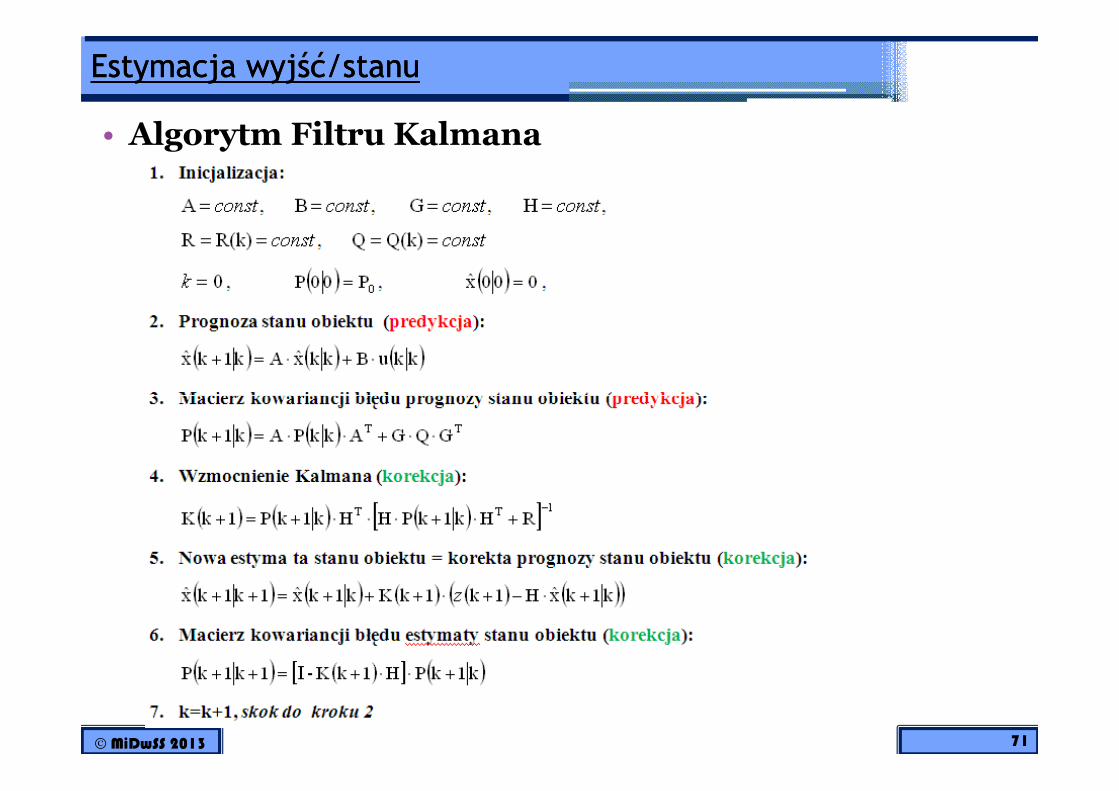
• Algorytm Filtru Kalmana
MiDwSS 2013 71
Estymacja wyjść/stanu Estymacja wyjść/stanu
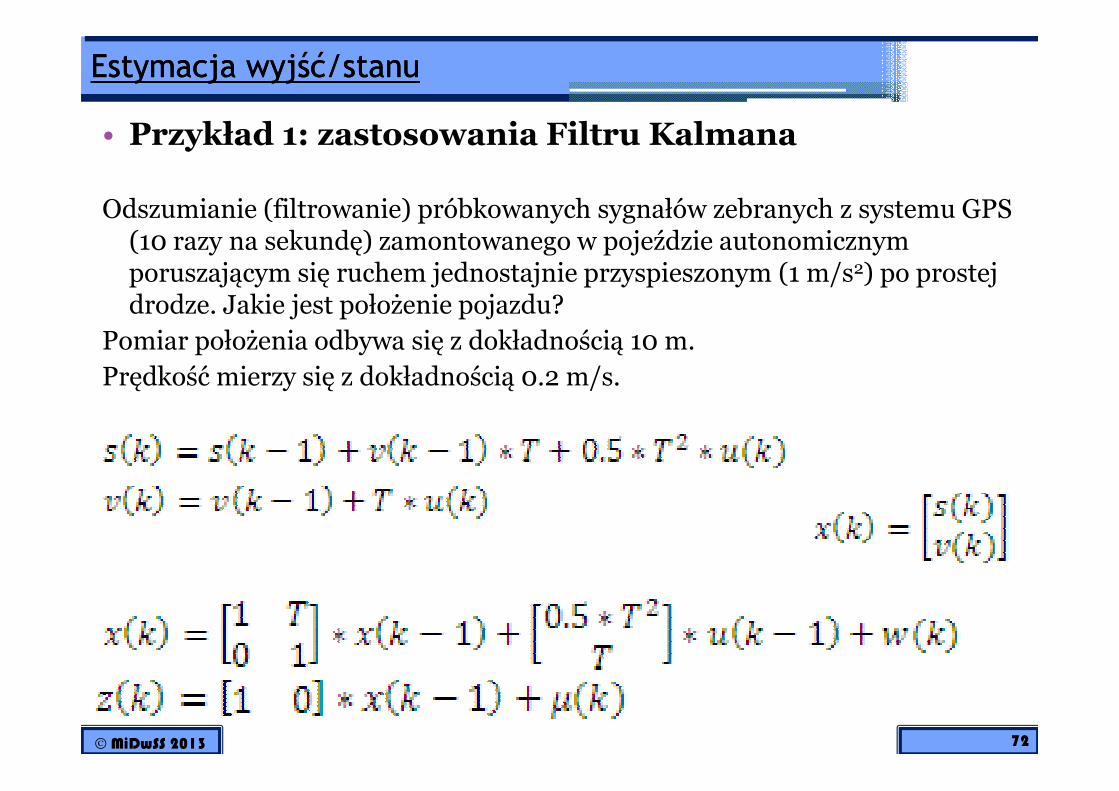
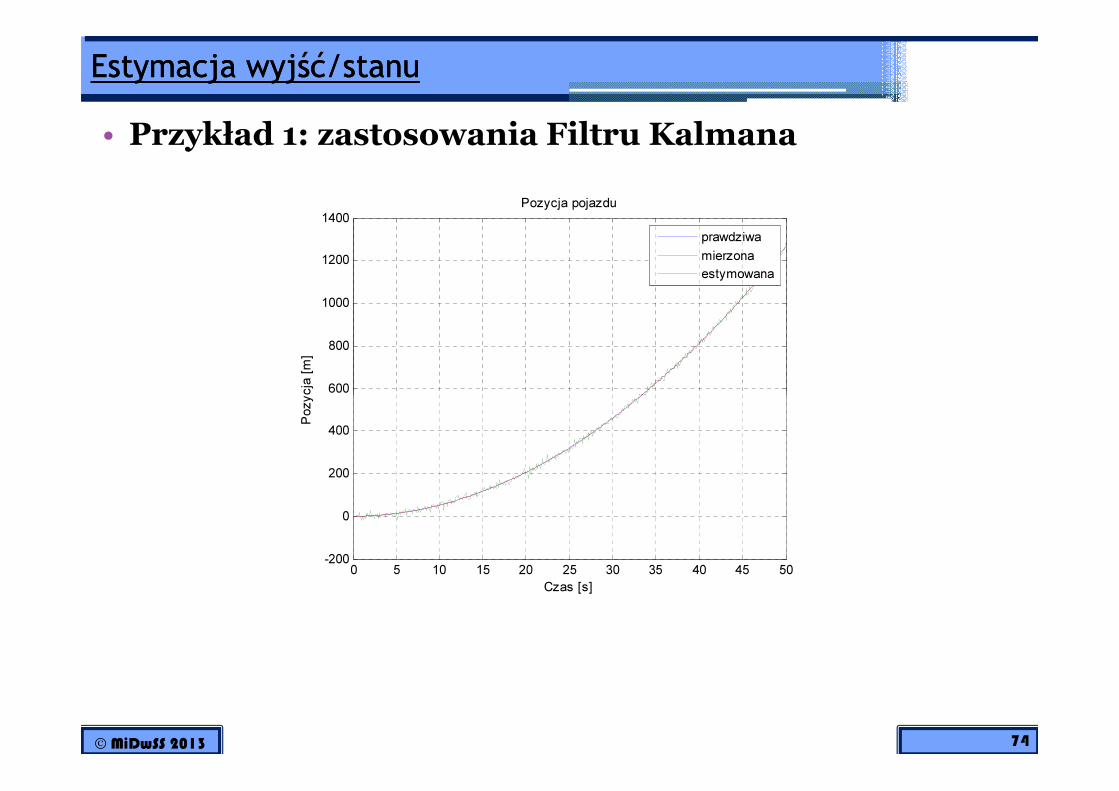
• Przykład 1: zastosowania Filtru Kalmana
Odszumianie (filtrowanie) próbkowanych sygnałów zebranych z systemu GPS (10 razy na sekundę) zamontowanego w pojeździe autonomicznym poruszającym się ruchem jednostajnie przyspieszonym (1 m/s2) po prostej drodze. Jakie jest położenie pojazdu?
Pomiar położenia odbywa się z dokładnością 10 m.
Prędkość mierzy się z dokładnością 0.2 m/s.
MiDwSS 2013 72
Estymacja wyjść/stanu Estymacja wyjść/stanu
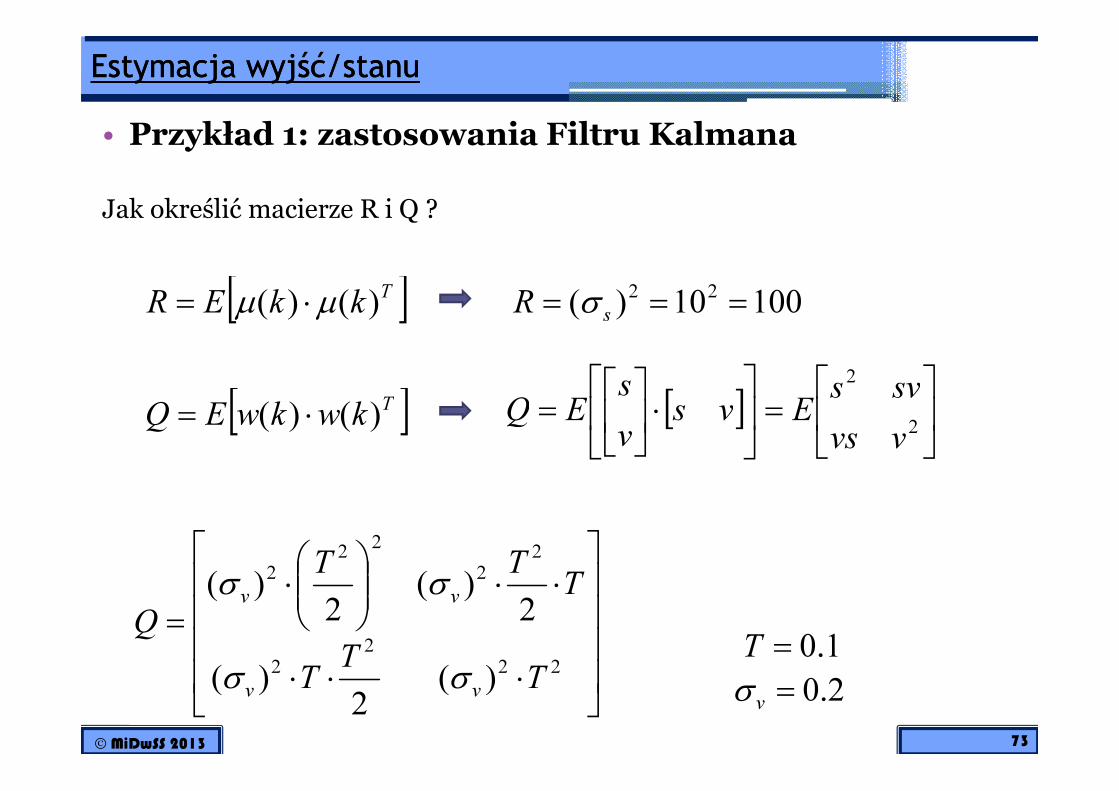
• Przykład 1: zastosowania Filtru Kalmana
Jak określić macierze R i Q ?
[ ]TkkER )()( µµ ⋅=
[ ]TkwkwEQ )()( ⋅=
10010)( 22===
sR σ
[ ]
=
⋅
=2
svsEvs
sEQ
MiDwSS 2013 73
[ ]TkwkwEQ )()( ⋅= [ ]
=
⋅
=
2vvs
svsEvs
v
sEQ
⋅⋅⋅
⋅⋅
⋅
=22
2
2
2
2
22
2
)(2
)(
2)(
2)(
TT
T
TTT
Q
vv
vv
σσ
σσ
1.0=T
2.0=vσ
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 1: zastosowania Filtru Kalmana
600
800
1000
1200
1400
Pozycja
[m
]
Pozycja pojazdu
prawdziwa
mierzona
estymowana
MiDwSS 2013 74
0 5 10 15 20 25 30 35 40 45 50-200
0
200
400
Czas [s]
Pozycja
[m
]
Estymacja wyjść/stanu Estymacja wyjść/stanu
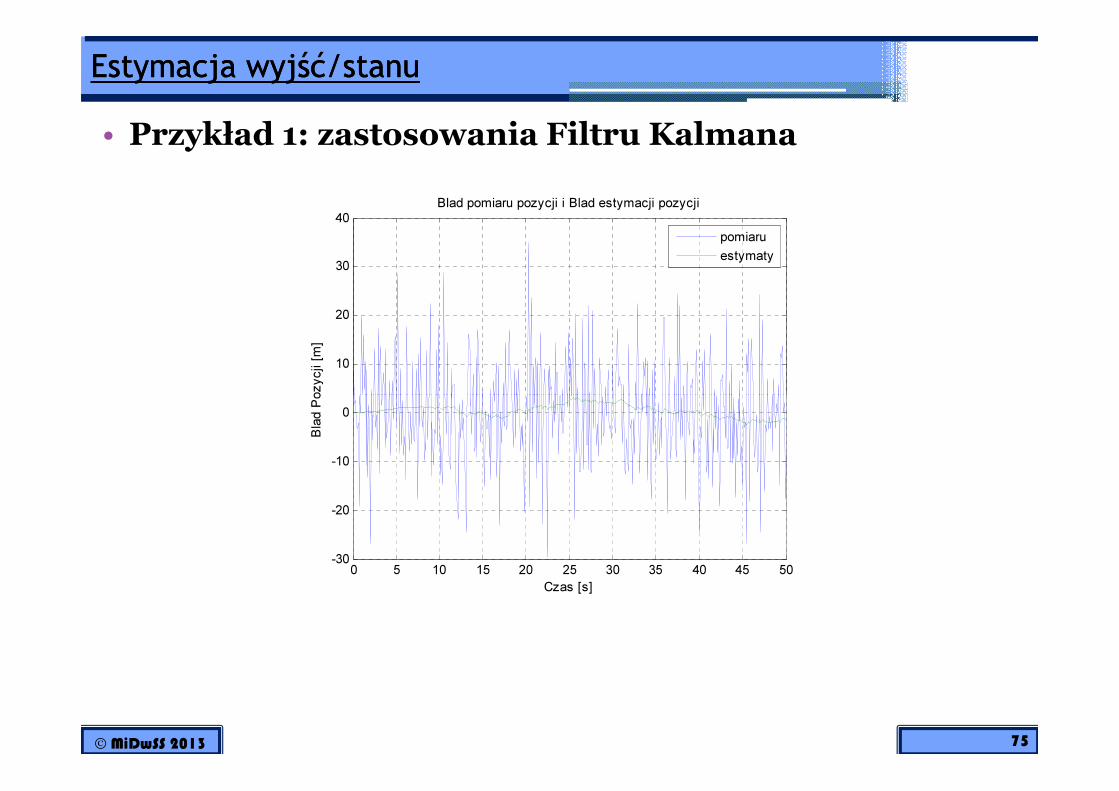
• Przykład 1: zastosowania Filtru Kalmana
10
20
30
40
Bla
d P
ozycji [
m]
Blad pomiaru pozycji i Blad estymacji pozycji
pomiaru
estymaty
MiDwSS 2013 75
0 5 10 15 20 25 30 35 40 45 50-30
-20
-10
0
Czas [s]
Bla
d P
ozycji [
m]
Estymacja wyjść/stanu Estymacja wyjść/stanu
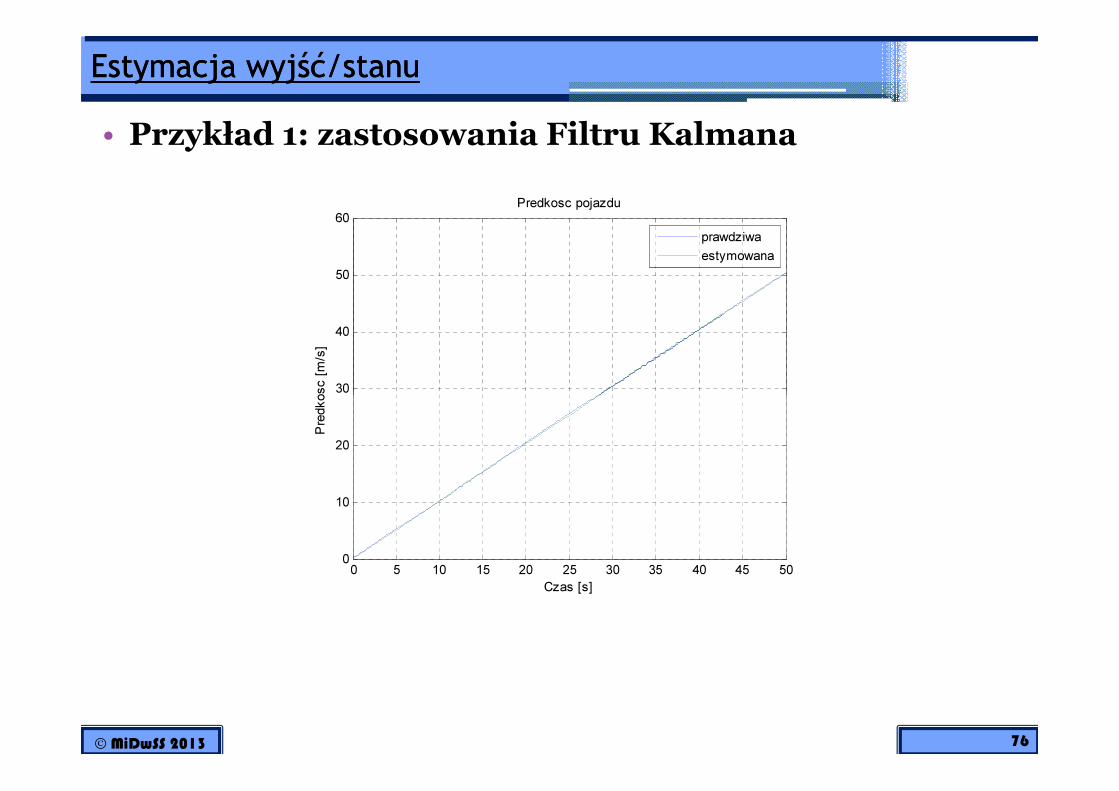
• Przykład 1: zastosowania Filtru Kalmana
30
40
50
60
Pre
dkosc [
m/s
]
Predkosc pojazdu
prawdziwa
estymowana
MiDwSS 2013 76
0 5 10 15 20 25 30 35 40 45 500
10
20
Czas [s]
Pre
dkosc [
m/s
]
Estymacja wyjść/stanu Estymacja wyjść/stanu
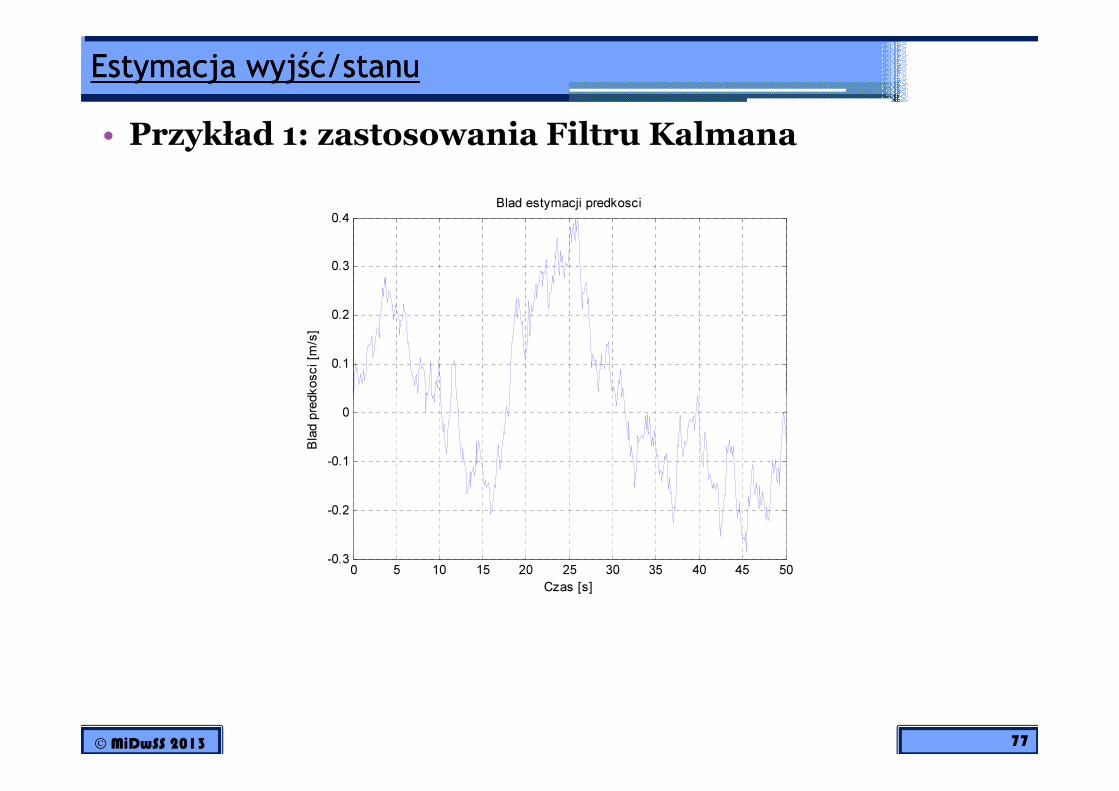
• Przykład 1: zastosowania Filtru Kalmana
0.1
0.2
0.3
0.4
Bla
d p
redkosci [m
/s]
Blad estymacji predkosci
MiDwSS 2013 77
0 5 10 15 20 25 30 35 40 45 50-0.3
-0.2
-0.1
0
Czas [s]
Bla
d p
redkosci [m
/s]
Estymacja wyjść/stanu Estymacja wyjść/stanu
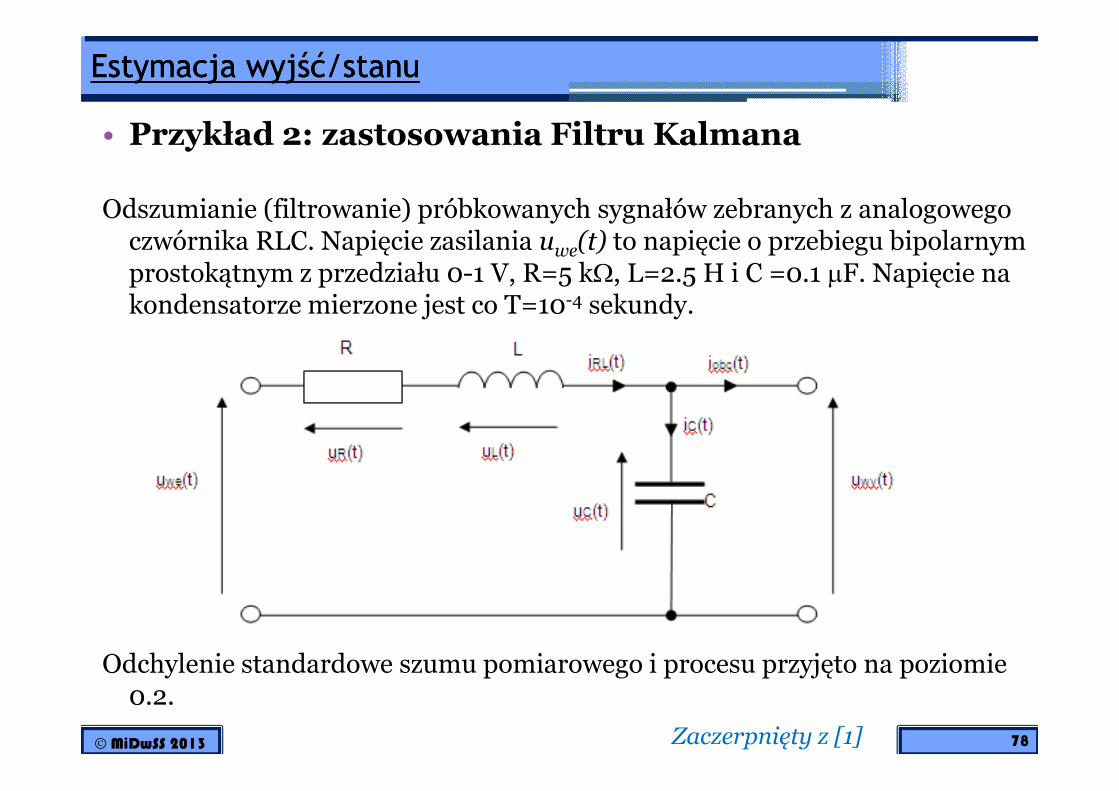
• Przykład 2: zastosowania Filtru Kalmana
Odszumianie (filtrowanie) próbkowanych sygnałów zebranych z analogowego czwórnika RLC. Napięcie zasilania u
we(t) to napięcie o przebiegu bipolarnym
prostokątnym z przedziału 0-1 V, R=5 kΩ, L=2.5 H i C =0.1 µF. Napięcie na kondensatorze mierzone jest co T=10-4 sekundy.
MiDwSS 2013 78
Odchylenie standardowe szumu pomiarowego i procesu przyjęto na poziomie 0.2.
Zaczerpnięty z [1]
Estymacja wyjść/stanu Estymacja wyjść/stanu
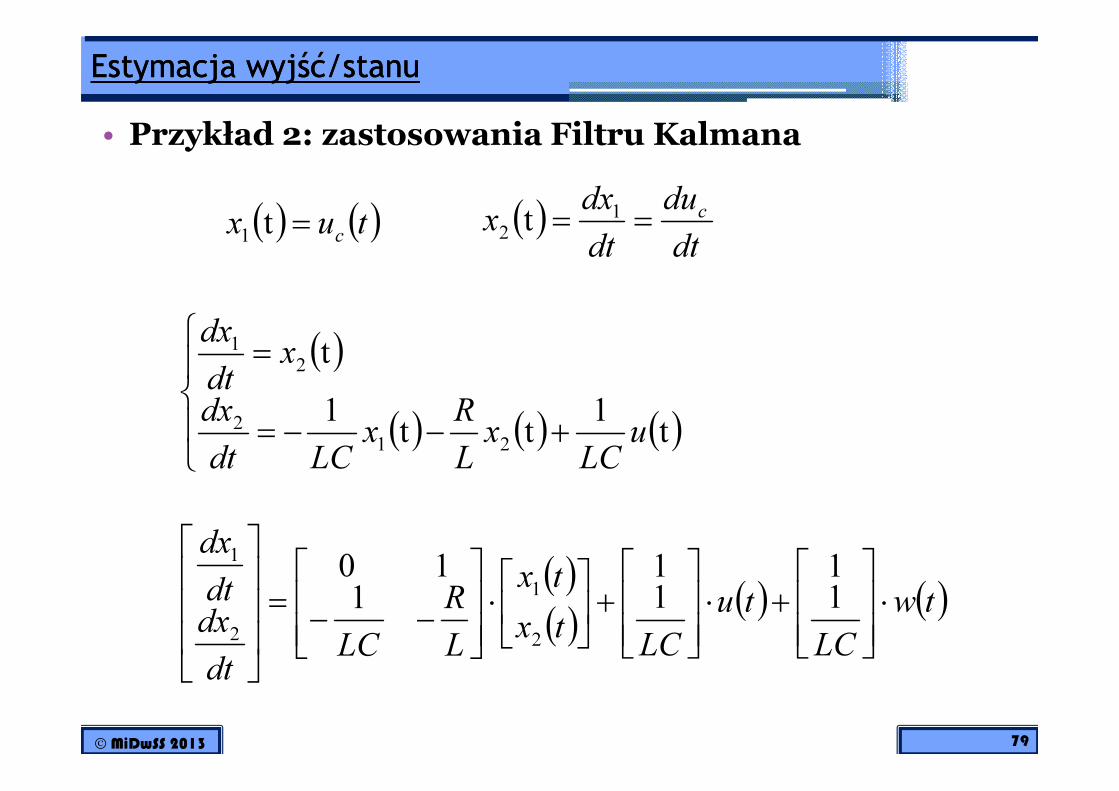
• Przykład 2: zastosowania Filtru Kalmana
( )
=
11
t2
1
Rdx
xdt
dx
( )dt
du
dt
dxx
c
==1
2t( ) ( )tux
c=t
1
MiDwSS 2013 79
( ) ( ) ( )
+−−= t
1tt
1
21
2u
LCx
L
Rx
LCdt
dx
dt
( )( )
( ) ( )tw
LC
tu
LCtx
tx
L
R
LCdt
dx
dt
dx
⋅
+⋅
+
⋅
−−=
1
1
1
1
1
10
2
1
2
1
Estymacja wyjść/stanu Estymacja wyjść/stanu
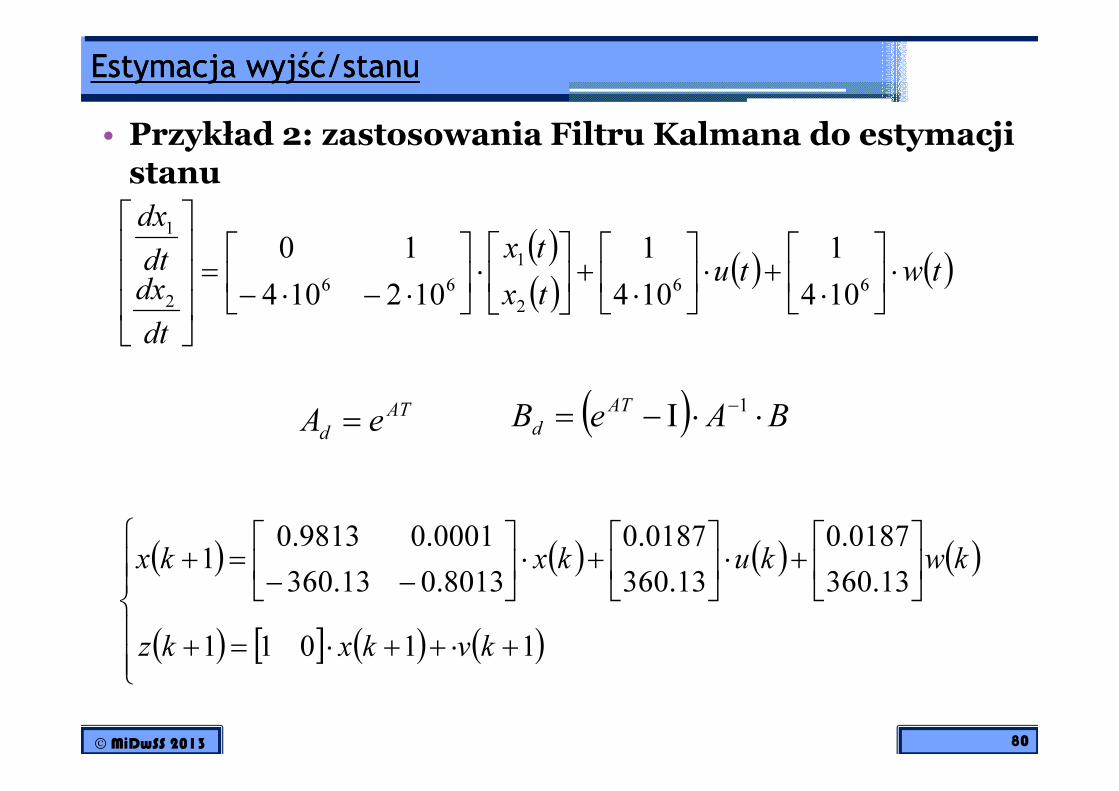
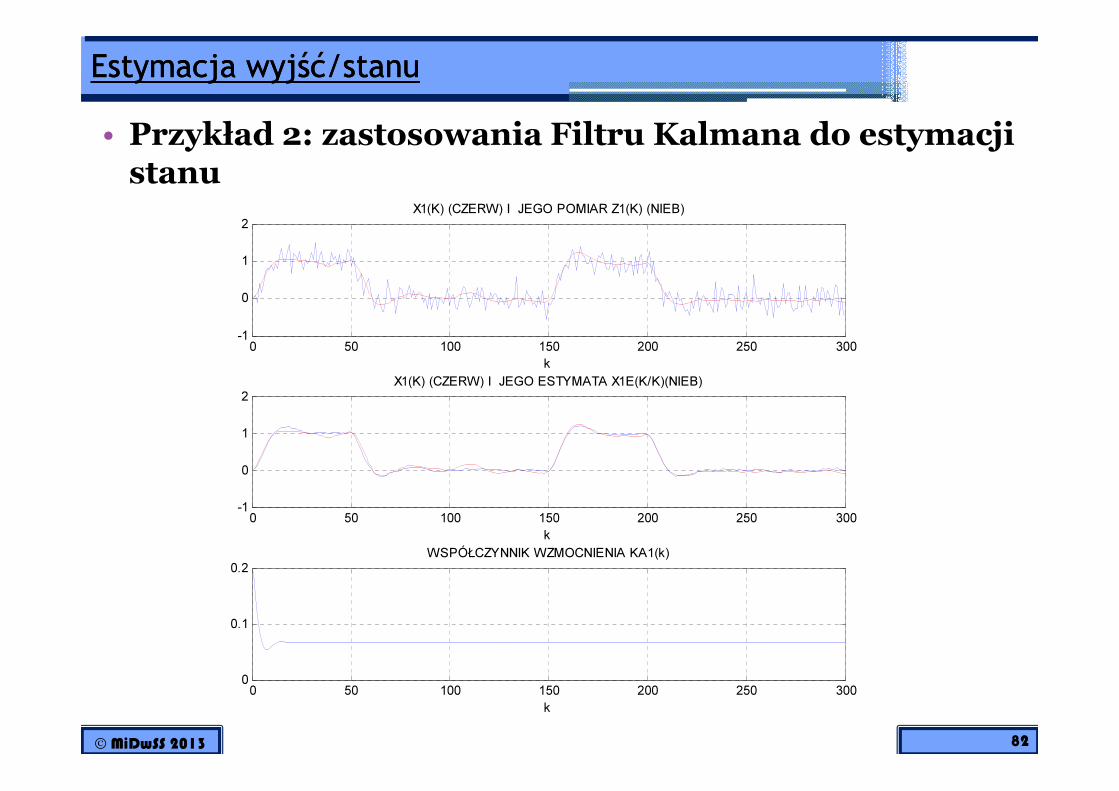
• Przykład 2: zastosowania Filtru Kalmana do estymacji stanu
( )
( )( ) ( )twtu
tx
tx
dt
dx
dt
dx
⋅
⋅+⋅
⋅+
⋅
⋅−⋅−=
66
2
1
66
2
1
104
1
104
1
102104
10
( )AT⋅⋅Ι−=
−1
MiDwSS 2013 80
( ) BAeBAT
d⋅⋅Ι−=
−1AT
deA =
( ) ( ) ( ) ( )
+⋅
+⋅
−−=+ kwkukxkx
13.360
0187.0
13.360
0187.0
8013.013.360
0001.09813.01
( ) [ ] ( ) ( )11011 +⋅++⋅=+ kvkxkz
Estymacja wyjść/stanu Estymacja wyjść/stanu
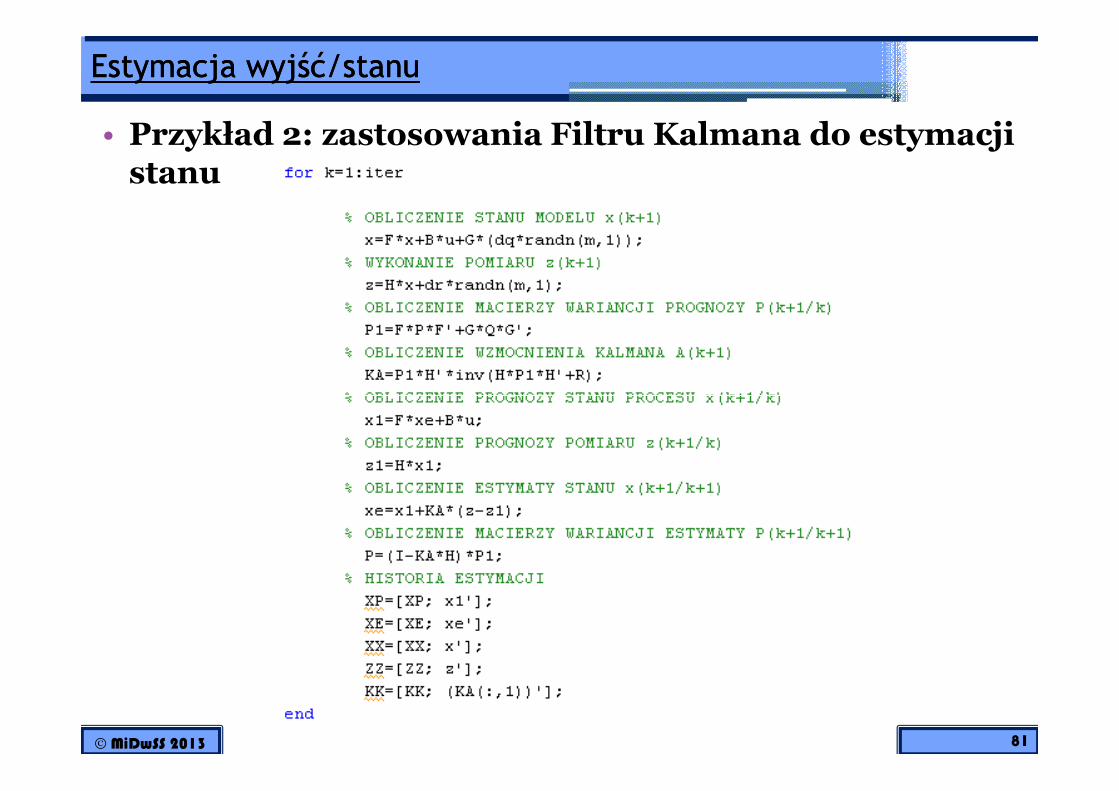
• Przykład 2: zastosowania Filtru Kalmana do estymacji stanu
MiDwSS 2013 81
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 2: zastosowania Filtru Kalmana do estymacji stanu
0 50 100 150 200 250 300-1
0
1
2X1(K) (CZERW) I JEGO POMIAR Z1(K) (NIEB)
k
2X1(K) (CZERW) I JEGO ESTYMATA X1E(K/K)(NIEB)
MiDwSS 2013 82
0 50 100 150 200 250 300-1
0
1
2
k
0 50 100 150 200 250 3000
0.1
0.2WSPÓŁCZYNNIK WZMOCNIENIA KA1(k)
k
Estymacja wyjść/stanu Estymacja wyjść/stanu
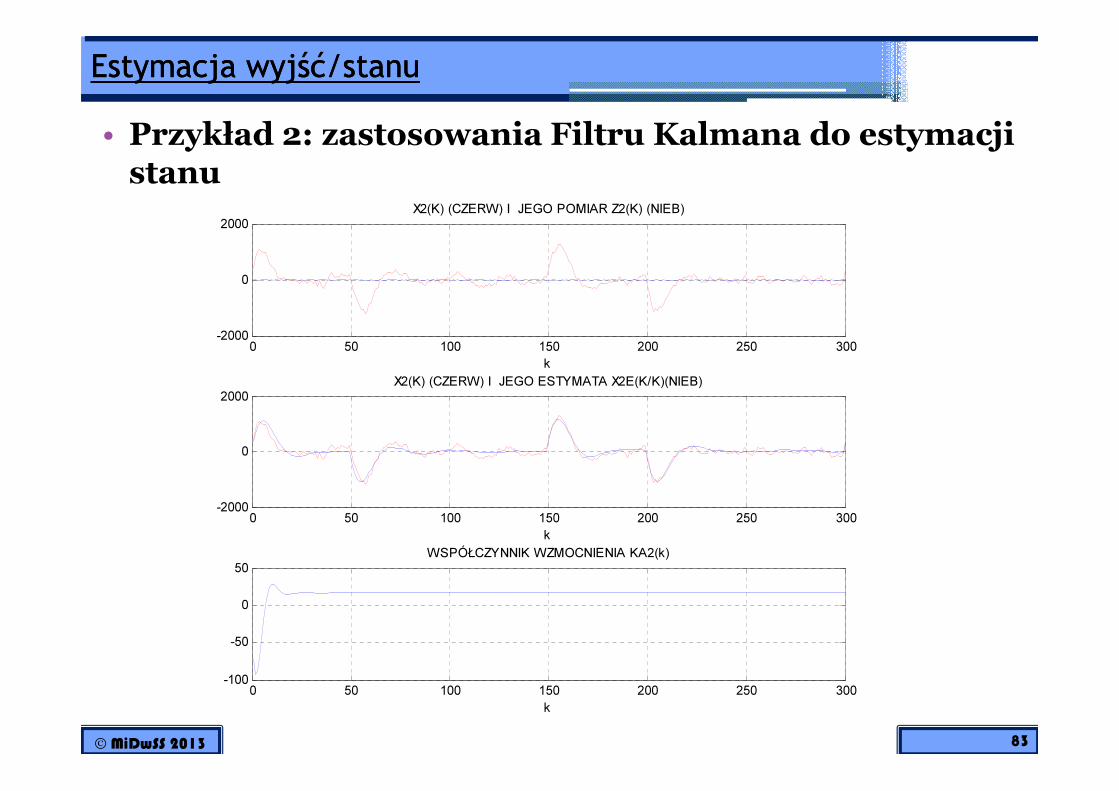
• Przykład 2: zastosowania Filtru Kalmana do estymacji stanu
0 50 100 150 200 250 300-2000
0
2000X2(K) (CZERW) I JEGO POMIAR Z2(K) (NIEB)
k
2000X2(K) (CZERW) I JEGO ESTYMATA X2E(K/K)(NIEB)
MiDwSS 2013 83
0 50 100 150 200 250 300-2000
0
2000
k
0 50 100 150 200 250 300-100
-50
0
50WSPÓŁCZYNNIK WZMOCNIENIA KA2(k)
k
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 3: zastosowania Filtru Kalmana do estymacji parametrów
• Rozważamy model postaci:
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )
+⋅Θ=
⋅+⋅Θ+⋅Θ=+
1
kvkxHkz
kwGkuBkxAkx
MiDwSS 2013 84
gdzie wektor parametrów jest nieznany.
• Wprowadzając nowy wektor zmiennych stanu:
przy czym
Θ
( )kΘ=Θ
( )( )( )
Θ=
k
kxky
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 3: zastosowania Filtru Kalmana do estymacji parametrów
• Otrzymuje się nieliniowy model w przestrzeni stanów:
( ) ( ) ( )( )( )
( ) ( )( ) ( )
+=
+=+
0
,1
kvkyhkz
kwkukyfky
MiDwSS 2013 85
• Rozwiązanie: Rozszerzony Filtr Kalmana (dalsza część wykładu)
przy czym:
( ) ( )( ) ( ) += kvkyhkz
( ) ( )( )( ) ( ) ( ) ( )
( )
,
Θ
⋅Θ+⋅Θ=
k
kuBkxAkukyf
( )( ) ( ) ( ) kxHkyh ⋅Θ=
Estymacja wyjść/stanu Estymacja wyjść/stanu
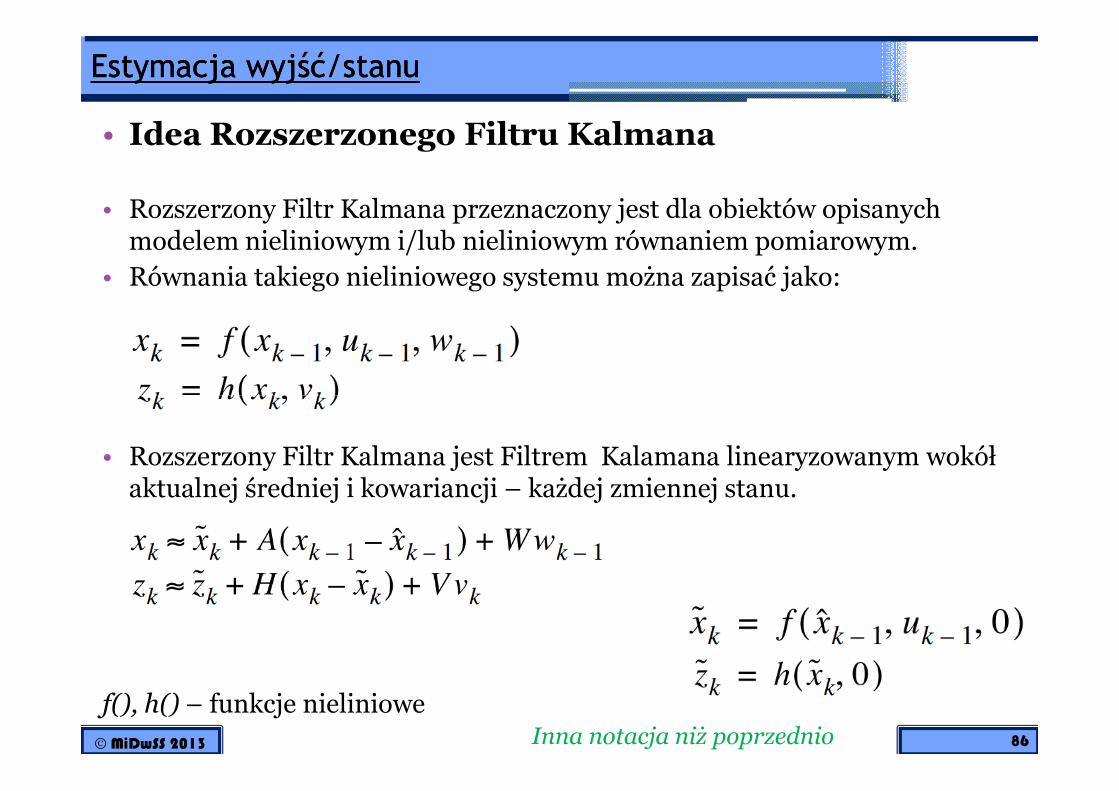
• Idea Rozszerzonego Filtru Kalmana
• Rozszerzony Filtr Kalmana przeznaczony jest dla obiektów opisanych modelem nieliniowym i/lub nieliniowym równaniem pomiarowym.
• Równania takiego nieliniowego systemu można zapisać jako:
MiDwSS 2013 86
• Rozszerzony Filtr Kalmana jest Filtrem Kalamana linearyzowanym wokół aktualnej średniej i kowariancji – każdej zmiennej stanu.
f(), h() – funkcje nieliniowe Inna notacja niż poprzednio
Estymacja wyjść/stanu Estymacja wyjść/stanu
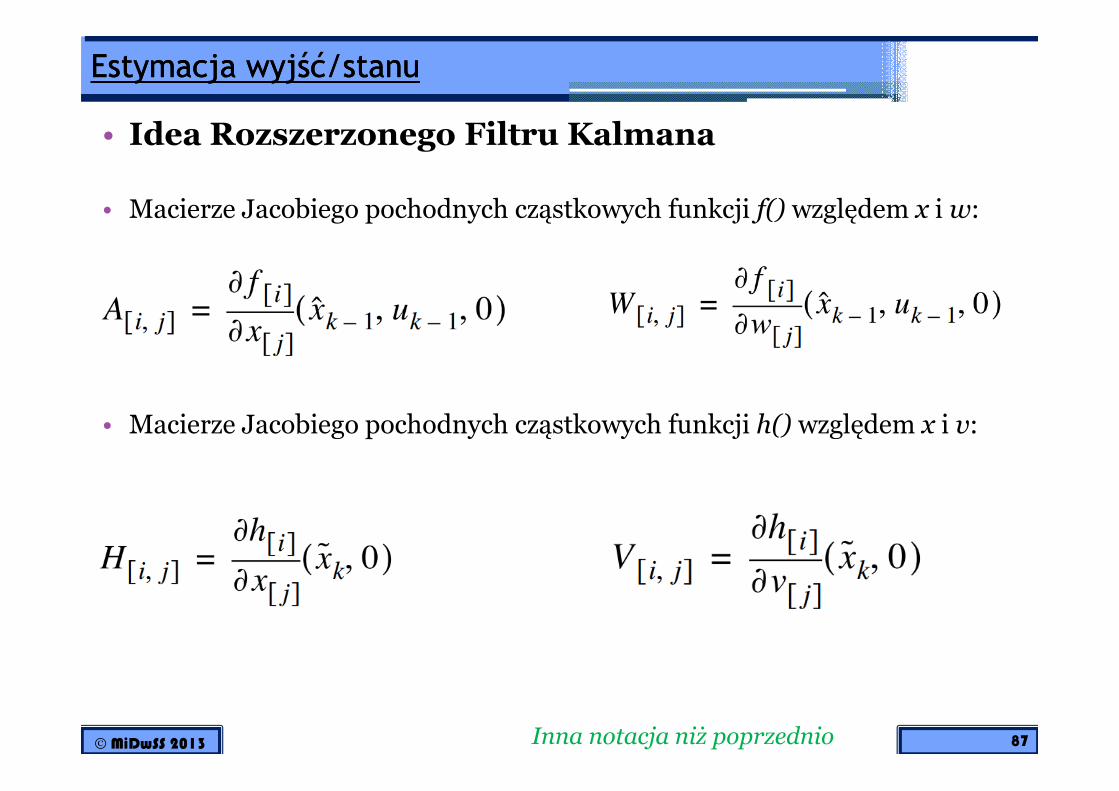
• Idea Rozszerzonego Filtru Kalmana
• Macierze Jacobiego pochodnych cząstkowych funkcji f() względem x i w:
MiDwSS 2013 87
• Macierze Jacobiego pochodnych cząstkowych funkcji h() względem x i v:
Inna notacja niż poprzednio
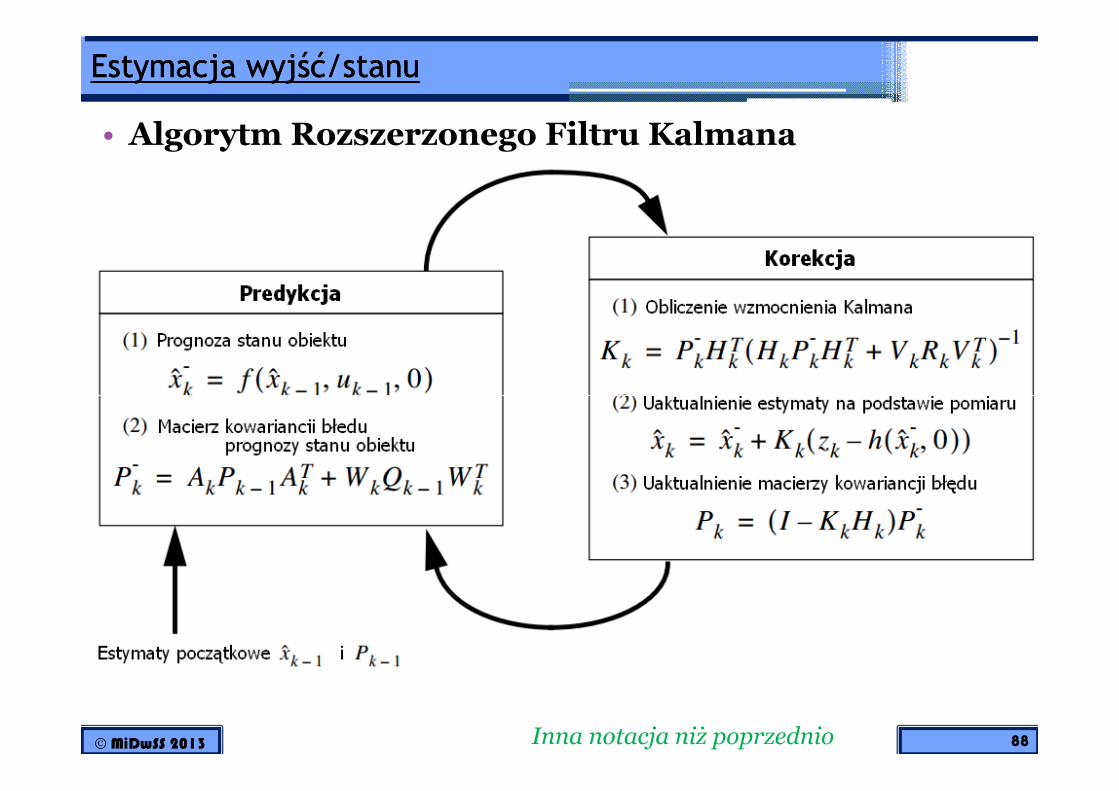
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Algorytm Rozszerzonego Filtru Kalmana
MiDwSS 2013 88Inna notacja niż poprzednio
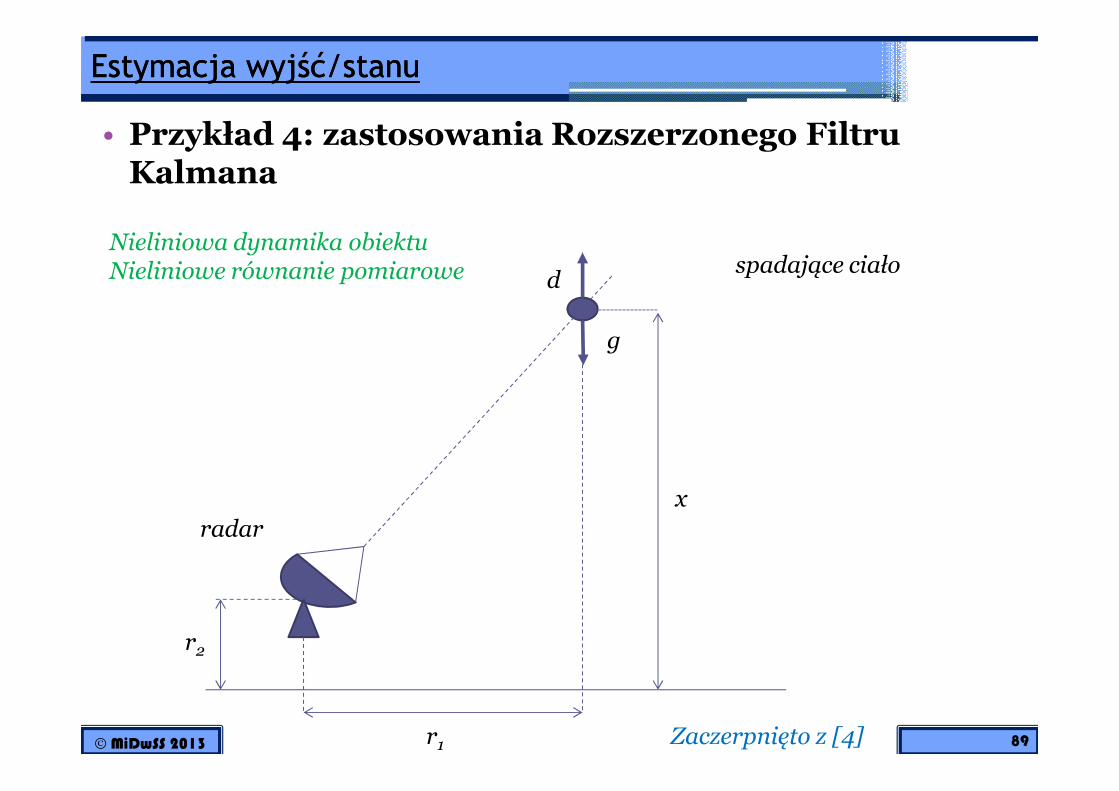
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 4: zastosowania Rozszerzonego Filtru Kalmana
spadające ciałoNieliniowa dynamika obiektuNieliniowe równanie pomiarowe d
g
MiDwSS 2013 89
radar
x
r1
r2
Zaczerpnięto z [4]
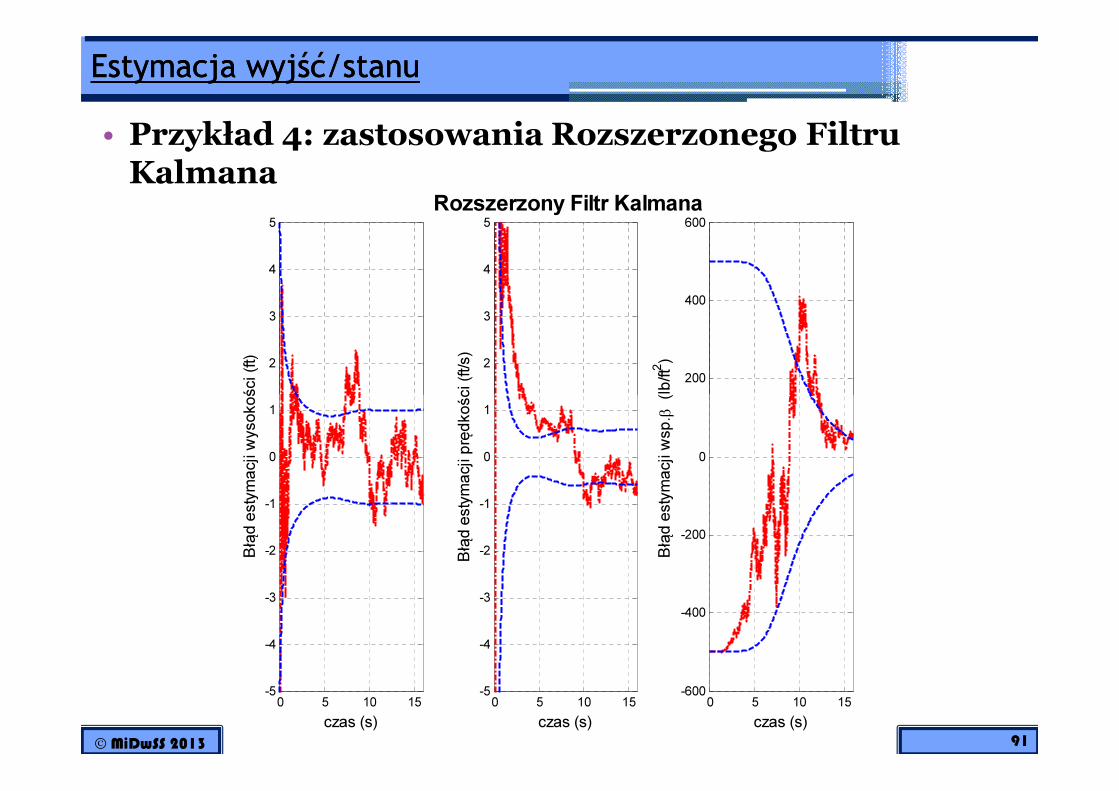
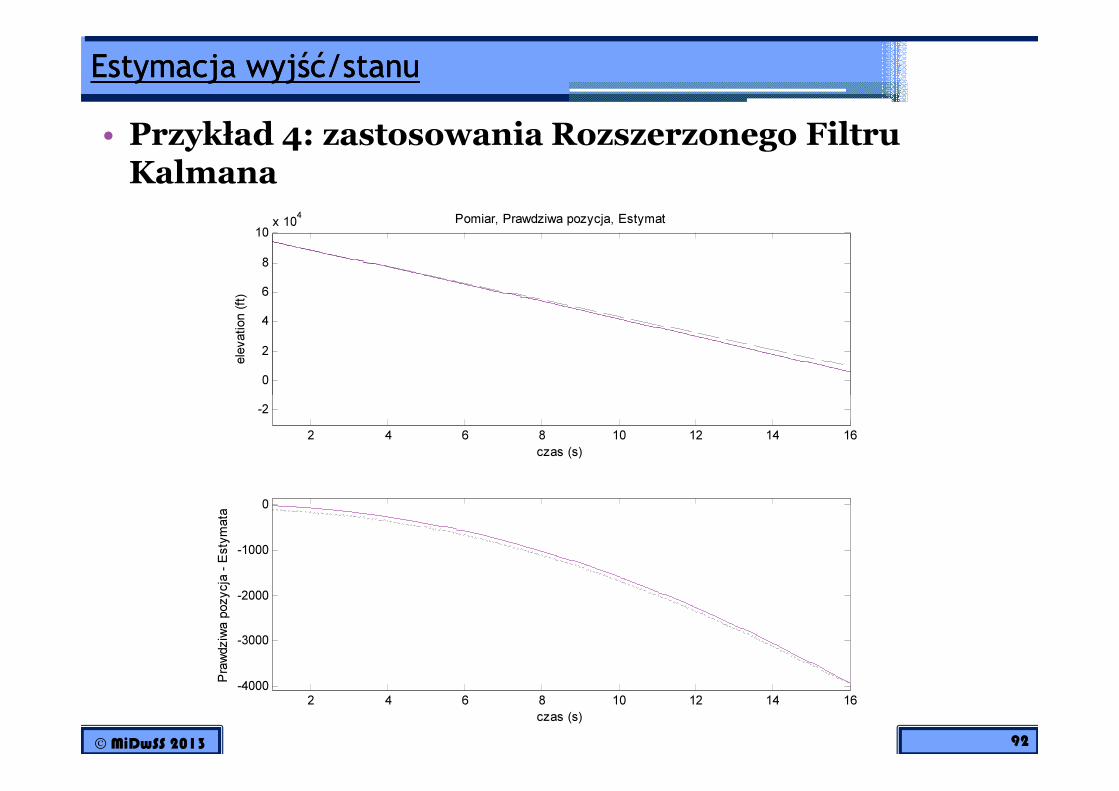
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 4: zastosowania Rozszerzonego Filtru Kalmana
• Model systemu (ciągły)
+
⋅
−=
2
1
2
12
2
1
w
w
x
x
gd
x
x
x
&
&
β1
3
12
1
=
=
=
x
xx
xx
&
MiDwSS 2013 90
• Model pomiaru (ciągły)
3
2
3
2
3
2
0 wxx&
( ) vrxrz +−+=2
21
2
1
β
3
2
20
2
1
x
xed
k
x
⋅
⋅⋅
=
−
ρ
ρ
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 4: zastosowania Rozszerzonego Filtru Kalmana
2
3
4
5
Błą
d e
sty
ma
cji w
yso
ko
ści (ft) 2
3
4
5
Błą
d e
sty
ma
cji p
ręd
ko
ści (ft/s)
Rozszerzony Filtr Kalmana
200
400
600
(l
b/ft2
)
MiDwSS 2013 91
0 5 10 15-5
-4
-3
-2
-1
0
1
Błą
d e
sty
ma
cji w
yso
ko
ści (ft)
czas (s)
0 5 10 15-5
-4
-3
-2
-1
0
1
Błą
d e
sty
ma
cji p
ręd
ko
ści (ft/s)
czas (s)
0 5 10 15-600
-400
-200
0
Błą
d e
sty
ma
cji w
sp
. β (l
b/ft
czas (s)
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 4: zastosowania Rozszerzonego Filtru Kalmana
0
2
4
6
8
10x 10
4
ele
vation (
ft)
Pomiar, Prawdziwa pozycja, Estymat
MiDwSS 2013 92
2 4 6 8 10 12 14 16
-2
czas (s)
2 4 6 8 10 12 14 16-4000
-3000
-2000
-1000
0
czas (s)
Pra
wdziw
a p
ozycja
- E
sty
mata
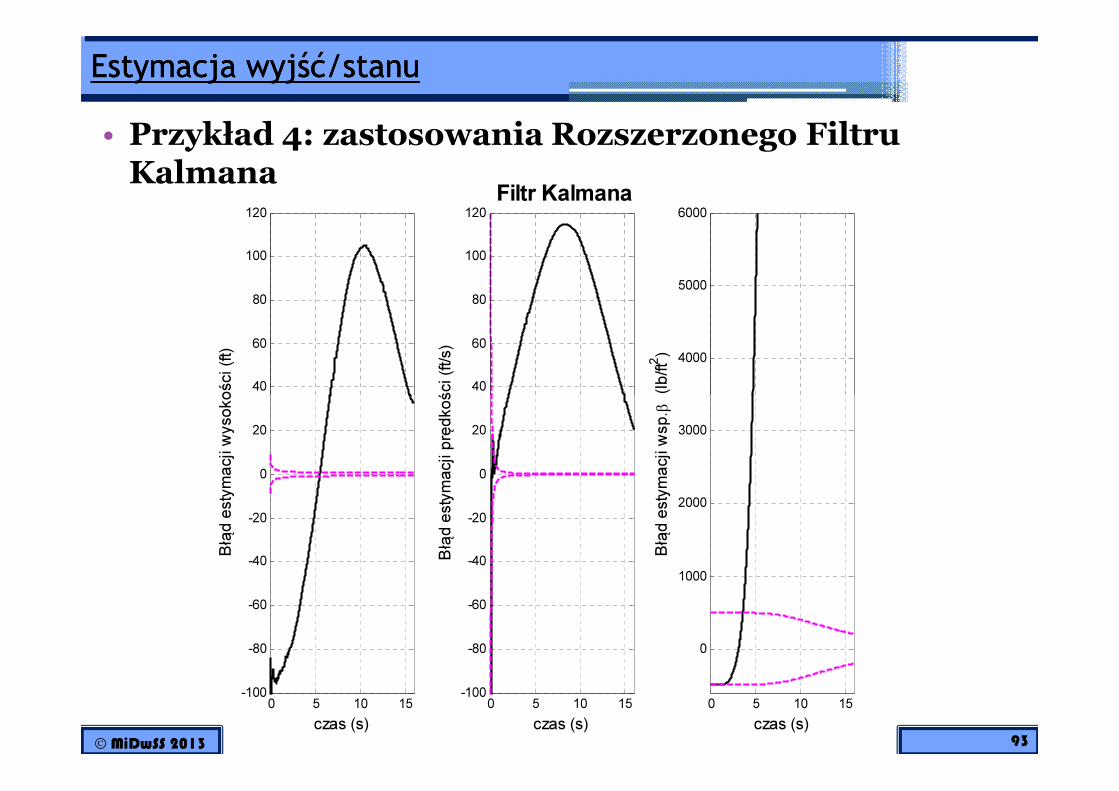
Estymacja wyjść/stanu Estymacja wyjść/stanu
• Przykład 4: zastosowania Rozszerzonego Filtru Kalmana
40
60
80
100
120
Błą
d e
sty
ma
cji w
yso
ko
ści (f
t)
40
60
80
100
120
Błą
d e
sty
ma
cji p
ręd
ko
ści (f
t/s)
Filtr Kalmana
4000
5000
6000
(l
b/ft2
)
MiDwSS 2013 93
0 5 10 15-100
-80
-60
-40
-20
0
20
Błą
d e
sty
ma
cji w
yso
ko
ści (f
t)
czas (s)
0 5 10 15-100
-80
-60
-40
-20
0
20
Błą
d e
sty
ma
cji p
ręd
ko
ści (f
t/s)
czas (s)
0 5 10 15
0
1000
2000
3000
Błą
d e
sty
ma
cji w
sp
. β (l
b/ft
czas (s)
BibliografiaBibliografia
Materiały wykładowe z przedmiotów (sem. I; studiów I stopnia) : „Modelowanie i Identyfikacja”
„Teoria Sterowania”
[1] Tomasz P.Zieliński, „Cyfrowe przetwarzanie sygnałów – od teorii do zastosowań”. WKŁ, 2007.
MiDwSS 2013
[2] Rudolph. E. Kalman, "A New Approach to Linear Filtering and Prediction Problems", Trasactions of the ASME: Journal of Basic Engineering, vol 82, Series D, pp. 35-45, 1960.
[3] Peter S. Maybeck, „Stochastic models, estimation and control“,Academic Press, 1979.
[4] Arthur Gelb, „Applied Optimal Estimation”. The M.I.T Press, 1974.
94
Zakończenie ;)Zakończenie ;)
Koniec części I
MiDwSS 2013
Dziękuję za uwagę !!!
95