POLITECHNIKA GDA ŃSKA Wydział Elektrotechniki i Automatyki ...€¦ · BADANIE DYNAMIKI SILNIKI...
23
POLITECHNIKA GDAŃSKA Wydzial Elektrotechniki i Automatyki Katedra Energoelektroniki i Maszyn Elektrycznych SYSTEMY ELEKTROMECHANICZNE PROJEKT ĆWICZENIE (SPS) BADANIE DYNAMIKI SILNIKI PRĄDU STAŁEGO ZASTOSOWANIE SYMULATORA OBWODÓW PSPICE Materialy pomocnicze Kierunek Elektrotechnika Studia stacjonarne 2-giego stopnia semestr 1 Opracowal Mieczyslaw Ronkowski Grzegorz Kostro Michal Michna Gdańsk 2012-2013
Transcript of POLITECHNIKA GDA ŃSKA Wydział Elektrotechniki i Automatyki ...€¦ · BADANIE DYNAMIKI SILNIKI...

POLITECHNIKA GDAŃSKA Wydział Elektrotechniki i Automatyki
Katedra Energoelektroniki i Maszyn Elektrycznych
S Y S T E M Y E L E K T R O M E C H A N I C Z N E PROJEKT
ĆWICZENIE (SPS)
BADANIE DYNAMIKI SILNIKI PRĄDU STAŁEGO
ZASTOSOWANIE SYMULATORA OBWODÓW PSPICE Materiały pomocnicze Kierunek Elektrotechnika Studia stacjonarne 2-giego stopnia semestr 1
Opracował
Mieczysław Ronkowski Grzegorz Kostro Michał Michna
Gdańsk 2012-2013


M. Ronkowski, G. Kostro, M. Michna 1
BADANIE DYNAMIKI SILNIKI PR ĄDU STAŁEGO ZASTOSOWANIE SYMULATORA OBWODÓW PSPICE
Program ćwiczenia
1. CEL ĆWICZENIA ........................................................................................................................................1 2. MASZYNA PRĄDU STAŁEGO JAKO WZORCOWE SPRZĘśENIE ELEKTROMECHANICZNE..............1 3. DYNAMICZNY MODEL OBWODOWY WZORCOWEGO SPRZĘśENIA ELEKTROMECHANICZNEGO.3 4. ZASTOSOWANIE PROGRAMU SYMULACYJNEGO PSPICE DO BADANIA WŁAŚCIWOŚCI DYNAMICZNYCH SILNIKA PRĄDU STAŁEGO.................................................................................................9 5. PYTANIA (TEORIA/SYMULACJA)............................................................................................................16 6. ZADANIE ...................................................................................................................................................17 7. SPRAWOZDANIE .....................................................................................................................................17 8. LITERATURA ............................................................................................................................................18 9. ZAŁĄCZNIK...............................................................................................................................................18
Wyznaczanie wartości parametrów modelu liniowego na podstawie danych katalogowych PYTANIA
1. CEL ĆWICZENIA Celem ćwiczenia jest:
• zapoznanie się z dynamicznym modelem obwodowym maszyny prądu stałego — wzorcowego sprzęŜenia elektromechanicznego;
• opanowanie zastosowania programu symulacyjnego PSPICE do badania właściwości dynamicznych silnika prądu stałego;
• wykonanie badań symulacyjnych typowych stanów pracy dynamicznej silnika prądu stałego o zadanych wartościach parametrów modelu oraz wymuszeniach elektrycznych i mechanicznych;
• porównanie wyników badań symulacyjnych z wynikami badań eksperymentalnych.
2. MASZYNA PRĄDU STAŁEGO JAKO WZORCOWE SPRZ ĘśENIE ELEKTROMECHANICZNE Schemat układu elektromechanicznego na rys. 1 przedstawia podstawowy model fizyczny maszyny
prądu stałego wraz z ilustracją zasady jej działania — generacji momentu elektromagnetycznego. Na podstawowy model fizyczny maszyny prądu stałego składają się następujące elementy czynne: magneśnica (uzwojenie wzbudzenia, bieguny główne, nabiegunniki, jarzmo); twornik (uzwojenie twornika, rdzeń twornika, komutator, szczotki, wał).
Uwaga: W rzeczywistej maszynie prądu stałego stosuje się dodatkowo: a) bieguny komutacyjne wraz z uzwojeniem (uzwojenie połączone szeregowo z uzwojeniem twornika) — umieszczone między biegunami głównymi — celem poprawy komutacji (eliminacja iskrzenia szczotek); c) uzwojenie kompensacyjne — umieszczone w Ŝłóbkach nabiegunników biegunów głównych — celem eliminacji oddziaływania twornika. Przyjęte na rys. 1 symbole a, f oznaczają umowne początki uzwojeń odpowiednio twornika i
wzbudzenia, a litery a', f' — umowne końce tych uzwojeń. Płynące prądy w uzwojeniach maszyny wytwarzają pola magnetyczne (przepływy, siły magnetomotoryczne -SMM), których osie są skierowane zgodnie z osiami (magnetycznymi) tych uzwojeń: np. oś d dla uzwojenia wzbudzenia f - f’; oś q dla uzwojenia twornika a - a’. Dla rozpatrywanej maszyny układ osi magnetycznych d oraz q jej uzwojeń stanowi układ współrzędnych naturalnych.
Maszyna prądu stałego będzie rozpatrywana jako układ elektromechaniczny w którym moce: elektryczna (dostarczana) i mechaniczna (odbierana), ulegają przemianie za pośrednictwem pola magnetycznego. Zatem podstawowym stanem pracy jest stan silnikowy. Moc pola magnetycznego jest mocą wewnętrzną maszyny, gdyŜ układ nie ma moŜliwości wymiany tej mocy z otoczeniem. Pole magnetyczne wyraŜa się zaleŜnościami strumieniowo-prądowymi. Stąd stan maszyny będzie opisany układem równań napięciowo-prądowych dla strony elektrycznej i momentowo-prędkościowych dla strony mechanicznej.

SILNIKI PRĄDU STAŁEGO. BADANIE CHARAKTERYSTYK DYNAMICZNYCH
Maszyna na rys. 1 moŜe być przedstawiona jako wielowrotnik elektromechaniczny o trzech parach zacisków (wrotach), które stanowią: dwa „wejścia elektryczne” — zaciski kolejnych uzwojeń i jedno „wyj ście mechaniczne” — koniec wału (sprzęgło). Dynamika (ruch) maszyny jest określona dwoma parametrami mocy na kaŜdej parze zacisków. Jej formalnym opisem będzie układ równań róŜniczkowych zwyczajnych nieliniowych przy trzech zadanych wymuszeniach. Układ ten opisuje, m.in., związki między napięciami, prądami i strumieniami magnetycznymi maszyny.
a'
a
Fa
Te
Ff
ωr
_
+
γ
ia-a'
oś uzwojenia wzbudzenia
oś cewki a-a'
a'
a
ua
Fa
Te
Ff
ωr
_
+
ia-a'
f
a)
b)
ia+_
ua
Fa
Te
Ff
if
ωr
_
+
d - oś uzwojenia wzbudzenia
q - oś szczotek
Ff
Fa
γ π= 2
Te
Zasada generacji momentu elektromagnetycznego
c)
d)
γ = const
Te~ |Ff ||Fa |
φf
φa
ua
oś uzwojenia wzbudzenia
oś cewki a-a'
uf
i ff
f'
uf
i f
f'
i a
ia
+
+
a
a'
uff
f'
Rys. 1. Podstawowy model fizyczny maszyny prądu stałego z ilustracją zasady jej działania —generacji
momentu elektromagnetycznego: a) oraz b) model elementarnego elektromechanicznego regulatora połoŜenia pola wirnika — generacja
„prawie nieruchomej” SMM twornika (wirnika) Fa;
c) model fizyczny wzorcowego sprzęŜenia elektromechanicznego — generacja nieruchomej SMM twornika Fa w osi q prostopadłej do osi d — osi pola magneśnicy (wzbudzenia),
d) zasada generacji momentu elektromagnetycznego — pewnej skłonności pola sił do zwiększania całkowitego strumienia magnetycznego sprzęŜonego z układem elektromagnetycznym maszyny W dalszych rozwaŜaniach przyjęto następujące załoŜenia upraszczające:
• uzwojenia stojana i wirnika maszyny są układem symetrycznym a przewody uzwojenia wirnika są równomiernie rozmieszczone w Ŝłobkach;
• płynące w uzwojeniach prądy o dowolnych przebiegach wzbudzają SMM stojana i wirnika o rozkładzie przestrzennym zbliŜonym do sinusoidalnego (odwzorowane wektorami przestrzennymi);

M. Ronkowski, G. Kostro, M. Michna 3
• wpływ pola elektrycznego między elementami maszyny, zjawisk anizotropii, histerezy i nasycenia obwodu magnetycznego, strat w Ŝelazie i wypierania prądu w przewodach uzwojeń jest pomijalnie mały (odpowiada to przyjęciu liniowych obwodów magnetycznych i elektrycznych maszyny);
• układ mechaniczny maszyny jest idealnie sztywny, a jego stałymi skupionymi są moment bezwładności i współczynnik tarcia lepkiego.
Uwaga: Przyjęty na rys. 1 sposób strzałkowania napięć, prądów, SMM, prędkości kątowej i momentów obrotowych dotyczy pracy silnikowej. Pokazany zwrot prędkości kątowej wirnika przyjęto jako zwrot odniesienia — odpowiada wartości chwilowej dodatniej (ωr > 0). Analogicznie zwroty
prądów uzwojenia twornika i wzbudzenia odpowiadają ich wartościom chwilowym dodatnim (np. dodatni prąd twornika dopływa do zacisku a, natomiast wypływa zaciskiem a’).
Maszyna prądu stałego jest fizycznym przykładem tzw. wzorcowego sprzęŜenia elektromechanicznego, tzn. układu elektromechanicznego, w którym moŜna wyróŜnić dwa obwody „jakby nieruchome” względem siebie o osiach magnetycznych wzajemnie prostopadłych — tworzących kąt momentu γ = π/2. Osie te przyjęto oznaczyć symbolami d i q.
Wzajemnie prostopadłe połoŜenie osi sił SMM uzwojenia wirnika (twornika) względem osi SMM
uzwojenia stojana (wzbudzenia) — tworzących kąt momentu γ = π/2, generuje moment elektromagnetyczny (jako efekt interakcji dwóch pól) proporcjonalny do iloczynu:
• modułów wektorów SMM stojana |Ff|i wirnika |Fa| (przy pomięciu efektu nasycenia Ŝelaza i reakcji
twornika); • strumienia w szczelinie przytwornikowej bieguna głównego i prądu wirnika (przy uwzględnieniu
efektu nasycenia Ŝelaza i reakcji twornika). Stwarza to szczególnie korzystne warunki kształtowania charakterystyki zewnętrznej maszyny
zarówno dla stanu statycznego jak i dynamicznego. Składają się na nie: • wyodrębnienie sterowanego źródła napięcia zasilania obwodu stojana, kształtującego strumień
wzbudzenia maszyny; • wyodrębnienie sterowanego napięcia zasilania obwodu wirnika, kształtującego prąd wirnika.
3. DYNAMICZNY MODEL OBWODOWY WZORCOWEGO SPRZĘśENIA ELEKTROMECHANICZNEGO
♦ Wielkości oraz parametry modelu fizycznego sprzęŜenia
Do opisu modelu fizycznego wzorcowego sprzęŜenia elektromechanicznego — maszyny prądu stałego (podanego na rys. 2), przyjęto układ współrzędnych dq i następujące wielkości oraz parametry (stałe skupione): a) wielkości i parametry elektryczne:
• napięcia twornika ua i wzbudzenia uf,
• prądy twornika ia oraz wzbudzenia if;
• rezystancje uzwojenia twornika Ra oraz wzbudzenia Rf;
b) wielkości i parametry elektromagnetyczne: • strumienie skojarzone obwodu wzbudzenia λdf, obwodu twornika λda w osi d, obwodu twornika λqa
w osi q, • indukcyjność własną obwodu wzbudzenia Lff, indukcyjnością własną obwodu twornika Laa oraz
indukcyjnością wzajemną Laf obwodów twornika i wzbudzenia o charakterze sprzęŜenia
elektromechanicznego (rotacyjnego); c) wielkości elektromechaniczne:
• kąt momentu γ, • sem rotacji ea,
• moment elektromagnetyczny Te;
d) wielkości i parametry mechaniczne:

SILNIKI PRĄDU STAŁEGO. BADANIE CHARAKTERYSTYK DYNAMICZNYCH
• prędkość kątowa elektryczna wirnika ωr (równoznaczna prędkości mechanicznej dla maszyny
dwubiegunowej — P = 2), • moment obciąŜenia TL,
• sumaryczny moment bezwładności wirnika i obciąŜenia J, • współczynnik tarcia lepkiego Bm.
uf
if
df
ua
ia
qa
da
ea
Te
r
d
q
+
TL
λdf ff fL i=
λda af fL i=λqa aa aL i=
ea r da= ω λ T ie a da= λ
B)(V qFe
×=T BVEae ××××====
J'Bm'
Rys. 2. Podstawowy model fizyczny wzorcowego sprzęŜenia elektromechanicznego — układ obwodów stojana i wirnika „jakby nieruchomych” względem siebie o osiach magnetycznych q oraz d wzajemnie
prostopadłych
Uwaga: Podstawy fizyczne wyprowadzenia równania momentu elektromagnetycznego i sem rotacji podano na rys. 2, odwołując się do wzoru Lorentza — wzoru na siłę działającą na ładunek q poruszający się z prędkością V w polu magnetycznym o indukcji B. Proszę pamiętać, Ŝe waŜny jest ruch względny ładunku i pola!. Regulator elektromechaniczny (komutator i szczotki) połoŜenia pola twornika sprawia, Ŝe prąd
zmienny w prętach uzwojenia twornika wzbudza strumień λqa nieruchomy i prostopadły względem
strumienia głównego (szczelinowego) λda — strumienia wzbudzanego prądem if. Zatem wirujące uzwojenie

M. Ronkowski, G. Kostro, M. Michna 5
twornika moŜna odwzorować obwodem "jakby nieruchomym" — obwodem w którym płynie takŜe prąd stały, który jest równy prądowi ia dopływającemu do zacisków szczotek.
♦ Równania równowagi dynamicznej sprzęŜenia
Konsekwencją powyŜszych warunków i załoŜeń są proste równania równowagi dynamicznej obwodu twornika i wzbudzenia wzorcowego sprzęŜenia elektromechanicznego:
dfpfifRfu λ+= (1)
aeqapaiaRau +λ+= (2)
gdzie: p = d/dt - operator róŜniczkowania. Przy tworzeniu modelu sprzęŜenia, wpływ wielkości magnetycznych (strumieni sprzęŜonych) na
właściwości sprzęŜenia odwzorowano wielkościami obwodowymi: indukcyjnością własną obwodu wzbudzenia Lff, indukcyjnością własną obwodu twornika Laa, indukcyjnością wzajemną Laf o charakterze
sprzęŜenia rotacyjnego (elektromechanicznego) obwodów twornika i wzbudzenia. Relacje te opisują odpowiednie zaleŜności dla strumieni sprzęŜonych podane na rys. 2.
Z kolei dla maszyny P- biegunowej zaleŜności podane na rys. 2 przyjmują następującą postać: dla sem rotacji
rmfiafGrmP
fiafLrfiafLae ωωω ============ )2
( (3)
dla momentu elektromagnetycznego (kaŜda para biegunów zwiększa P/2 razy moment)
aifiafGaiP
fiafLeT ======== )2
( (4)
gdzie:
afLPafG )
2(==== (5)
mrP
r ωω )2
(==== (6)
Gaf - indukcyjność rotacji, ωrm - mechaniczna prędkość kątowa wirnika; P - liczba biegunów.
Celem sformułowania równania równowagi dynamicznej układu mechanicznego wzorcowego sprzęŜenia elektromechanicznego rozwaŜono odpowiednie siły działające na wirnik maszyny prądu stałego (rys. 3).
Bmωrm
Te
JpωrmTL
ωrm
Rys. 3. Siły działające na wirnik maszyny prądu stałego: sformułowanie równania równowagi dynamicznej
układu mechanicznego
Na podstawie rys. 3 moŜna sformułować następujące równanie równowagi:
LTrmmBrmpJeT ++= ωω (7)
lub

SILNIKI PRĄDU STAŁEGO. BADANIE CHARAKTERYSTYK DYNAMICZNYCH
LTrmBPrJp
PeT ++= ωω )2()2( (8)
gdzie:
mBmBP
JJP
′=′= )2( ; )2(
J’ - moment bezwładności oraz B’m - współczynnik tarcia lepkiego, zredukowane do elektrycznej prędkości
kątowej wirnika ωr, tzn. prędkości odpowiadającej maszynie dwubiegunowej (P=2).
♦ Analog elektryczny sprzęŜenia
MoŜliwe analogie elektryczne równania ruchu (7) układu mechanicznego pokazuje rys. 4.
-+Te
L = J R = Bm
TL
Te G = 1/Bm TL
uC
i C = J
iu
m
m
_+ u
i
a)
b)
rmω
rmω
Rys. 4. MoŜliwe analogie elektryczno-mechaniczne równania ruchu: a) analogie: napięcie — prędkość kątowa, prąd — moment obrotowy, pojemność — moment bezwładności, przewodność — współczynnik tarcia; b) analogie: prąd: — prędkość kątowa, napięcie — moment obrotowy, indukcyjność — moment
bezwładności, rezystancja — współczynnik tarcia
Równania (1)-(4) i (7) dla wzorcowego sprzęŜenia elektromechanicznego (P - biegunowego) moŜna odwzorować dynamicznym modelem obwodowym pokazanym na rys. 5, gdzie sem rotacji modelowane jest sterowanym źródłem napięciowym, a dla modelu obwodowego równania ruchu (7) przyjęto analogie odpowiednie podane na rys. 4a (moment elektromagnetyczny modelowany jako sterowane źródło prądowe) i na rys. 4b (moment elektromagnetyczny modelowany jako sterowane źródło napięciowe).
♦ Redukcja analogu elektrycznego sprzęŜenia
Celem redukcji analogu elektrycznego (obwodu) układu mechanicznego do obwodu twornika załoŜono: if = const, zatem
rmvkrmfiafGae ωω == (9)
aivkaifiafGeT == (10)
gdzie, stała maszyny
fiafGvk =
Następnie po przekształceniu równania (10) do postaci:
vkeT
ai =
oraz załoŜeniu:
rmvkaecu ω == równanie układu (obwodu) mechanicznego (7) moŜna przekształcić do postaci:

M. Ronkowski, G. Kostro, M. Michna 7
) ( 2
)( 2 vk
LTrmvk
vk
mBrmvkp
vk
Jai ++= ωω
(11) a)
ua
a Ra Laa
iaea
ea = Gaf if
Lff
if
Rf
uf
f
+
_
+
_
+_
Te = Gaf if ia
+
_TL
muc =
G = 1/BmTe C = J
rmω
rmω
b)
ua
a Ra Laa
iaea
ea = Gaf if
Lff
if
Rf
uf
f
+
_
+
_
+_
Te = Gaf if ia
+
_
TL
m
iL =
R = Bm
Te
L = J
+_
-+
rmω
rmω
Rys.5. Dynamiczny model obwodowy (analog elektryczny) maszyny (silnika) prądu stałego — wzorcowego sprzęŜenia elektromechanicznego: a) analog elektryczny układu mechanicznego wg rys. 4a; b) analog
elektryczny układu mechanicznego wg rys. 4b
Uwaga: Strzałkowanie na rys. 5. przyjęto wg konwencji silnikowej (odbiornikowej).
1. Wielkości modelu na rys. 5. ua - napięcie twornika
uf - napięcie wzbudzenia

SILNIKI PRĄDU STAŁEGO. BADANIE CHARAKTERYSTYK DYNAMICZNYCH
ia - prąd twornika
if - prąd wzbudzenia
ea - sem rotacji
Te - moment elektromagnetyczny (wewnętrzny)
ωrm - prędkość kątowa (mechaniczna) wirnika
TL - moment obciąŜenia (zewnętrzny)
2. Parametry modelu na rys. 5. Ra - rezystancja obwodu twornika
Rf - rezystancja obwodu wzbudzenia
Laa - indukcyjność obwodu twornika
Lff - indukcyjność obwodu wzbudzenia
Gaf - indukcyjność rotacji (sprzęŜenia elektromechanicznego)
J - moment bezwładności Bm - współczynnik tarcia lepkiego
Taka postać równania ruchu (umoŜliwia połączenie galwaniczne zacisków sem rotacji ea obwodu
twornika z zaciskami źródła momentu elektromagnetycznego (o wydajności równej ia) analogu
elektrycznego układu mechanicznego (rys 5a). Otrzymujemy zatem analog RLC wzorcowego sprzęŜenia elektromechanicznego, pokazany na rys. 6.
ua
a Ra L aa
ia
m'
Jkv
2ea
e k a v rm= ω
- pojemność dynamiczna
_ T
kL
v
_
Jk v
2_
v
=T
kiea
_k Gv af f= I
C’=Bmk v
2
1G’=
C’=
Rys. 6. Maszyna (silnik) prądu stałego — wzorcowe sprzęŜenie elektromechaniczne: zredukowany
dynamiczny model obwodowy: analog RLC przy załoŜeniu if = const
Dla analogu RLC na rys. 6, przy załoŜeniu Bm ≈ 0, moŜna zdefiniować następujące stałe czasowe
silnika prądu stałego: • stała czasowa elektromagnetyczna
/ aaaa RL=τ
• stała czasowa elektromechaniczna
2) (
faf
aam IG
RJCR =′=τ
gdzie, pojemność
22 )() (
vfaf k
J
IG
JC ==′
nazywa się pojemnością dynamiczną silnika prądu stałego. Dla tak zdefiniowanych stałych czasowych moŜna podać następujące warunki stabilności
przebiegów dynamicznych silnika prądu stałego:

M. Ronkowski, G. Kostro, M. Michna 9
τ τm a> 4 przebiegi aperiodyczne;
τ τm a= 4 przebiegi aperiodyczne krytyczne;
τ τm a< 4 przebiegi oscylacyjne.
4. ZASTOSOWANIE PROGRAMU SYMULACYJNEGO PSPICE DO BA DANIA WŁAŚCIWOŚCI DYNAMICZNYCH SILNIKA PRĄDU STAŁEGO
♦ Stany dynamiczne silnika prądu stałego
Stany dynamiczne silnika prądu stałego określone są przez następujące czynniki: • warunki zasilania (wymuszenia elektryczne); • przebiegi napięć, prądów i strumieni sprzęŜonych poszczególnych uzwojeń stojana i wirnika; • rozwijany przez maszynę moment elektromagnetyczny (wewnętrzny) jako wynik wzajemnego
oddziaływania odpowiednich prądów i strumieni sprzęŜonych; • warunki obciąŜenia na wale maszyny (moment obciąŜenia - zewnętrzny, prędkość kątowa
wirnika) • wypadkowy moment bezwładności (silnika i maszyny napędzanej).
Silnik prądu stałego moŜe być zasilany w warunkach sieci sztywnej lub elastycznej, napięcia zasilania mogą mieć przebieg stały („gładki”) lub odkształcony (np. zasilanie z prostownika).
Warunki obciąŜenia na wale silnika prądu stałego — „zaciskach mechanicznych” — mogą być stałe lub zmienne: np. zaleŜne od czasu lub prędkości kątowej maszyny (liniowo lub kwadratowo).
Typowe stany pracy dynamicznej silnika prądu stałego, pracującej w układzie napędu elektrycznego, mogą być następujące:
• rozruch (bezpośredni, z opornikiem w obwodzie twornika, za pomocą układu typu „chopper” lub prostownika sterowanego);
• hamowanie; • nawrót; • skokowa (lub inna) zmiana momentu obciąŜenia. • wybieg grupowy (np. zanik napięcia w sieci zasilającej kilka silników) • stany zwarcia w sieci zasilającej silnik (np. zwarcie chwilowe na zaciskach uzwojenia twornika).
Właściwa analiza wymienionych wyŜej stanów pracy dynamicznej — stanów nieustalonych — silnika prądu stałego, ze względu na nieliniowość zachodzących procesów elektromechanicznych w maszynie, wymaga zastosowania zaawansowanych technik symulacyjnych. Opracowany w p. 3 niniejszego ćwiczenia model obwodowy maszyny prądu stałego, zawierający m.in. źródła sterowane, stanowi wygodną bazę do obliczeń komputerowych, wykorzystujących programy symulacyjne obwodów elektrycznych typu: NAP, PSPICE, TUTSIM, itp. Program PSPICE wydaję się być zarówno programem najbardziej zaawansowanym jak i przyjaznym dla uŜytkownika, w klasie programów symulacyjnych obwodów elektrycznych.
♦ Budowa modelu symulacyjnego w programie PSPICE
Opierając się na modelu obwodowym maszyny prądu stałego przedstawionym na rys. 5b oraz zasadach formułowania modelu symulacyjnego obowiązujących dla programu PSPICE zbudowano analog elektryczny maszyny, pokazany na rys. 7, przystosowany do analizy za pomocą programu PSPICE. KaŜdy element jest włączony w obwód w dokładnie zdefiniowanych węzłach. Definicja węzłów polega na nazwaniu kaŜdego z nich kolejną liczbą lub literami. Nie obowiązuje Ŝadna hierarchia tych oznaczeń. Jedynym warunkiem jest umieszczenie na liście węzłów, węzła oznaczonego numerem „0”. W badaniach stanów nieustalonych — silnika prądu stałego naleŜy określić wartości parametrów dla jej modelu obwodowego, charakter wymuszeń elektrycznych i mechanicznych.
Wartości parametrów modelu silnika moŜna obliczyć z wystarczającą dokładnością dla obliczeń inŜynierskich na podstawie jej danych katalogowych lub danych pomiarowych (szczegóły w załączniku do instrukcji). Z kolei do wprowadzenia wartości tych parametrów do programu PSPICE wykorzystuje się instrukcję .PARAM, którą ilustruje następujący przykład:

SILNIKI PRĄDU STAŁEGO. BADANIE CHARAKTERYSTYK DYNAMICZNYCH
Obwód twornika
Obwód wzbudzenia
Obwód mechaniczny
Rys. 7. Analog elektryczny silnika prądu stałego dla sformułowania pliku wejściowego PSPICE (podstawa sformułowania — model obwodowy silnika na rys. 5b)
*Dane znamionowe (indeks n oznacza wartosci znamionowe) silnika: * Pn=13kW - moc; Uan=220V - napiecie twronika; * Ian=67.7A - prad twornika; Pfn=186W - moc wzbudzenia; * Ufn=110V - napiecie wzbudzenia; Ra=0.33 ohm - rezystancja twronika * Laa=0.204H - indukcyjnosc twronika; nn=1500obr/min - predkosc obrotowa; * J=0.11kgm2 - moment bezwladnosci * wprowadzanie danych poprzez paramerty globalne .PARAM Pn=13e3 Uan=220 Ian=67.7 Pfn=186 Ufn=110 .PARAM Ra=0.4 Laa=0.02 nn=1500 J=0.11 *stale .PARAM pi=3.14159 *Obliczenia brakujacych danych i parametrow modelu silnika .PARAM Ifn=Pfn/Ufn Rf=Ufn/Ifn Wrmn=2*pi*nn/60 *znamionowy moment obciazenia .PARAM TLn=Pn/Wrmn * obliczanie indukcyjnosci rotacji .PARAM Gaf=(Uan - Ian*Ra)/Ifn/Wrmn *przyjeto indukcyjnosc obwodu wzbudzenia Lff>=20*Laa*Rf/Ra .PARAM Lff=20*Laa*Rf/Ra *przyjeto wspolczynnik tarcia Bm=(0.01*Pn/Wrmn/Wrmn) Nms/rad .PARAM Bm=(0.01*Pn/Wrmn/Wrmn)
Klasyczne wymuszenia elektryczne dla silnika prądu stałego mają charakter napięciowy o stałej wartości. Do wprowadzenia wartości tych napięć do programu PSPICE wykorzystuje się instrukcję definiującą źródła napięciowe niezaleŜne. Wydajność tych źródeł moŜna zmieniać za pomocą odpowiednich współczynników, ilustruje to następujący przykład: *wspolczynniki do okreslenia napiecie zasilania twornika i wzbudzenia, .PARAM kUa=1 kUf=1 *************************************

M. Ronkowski, G. Kostro, M. Michna 11
*napiecie zasilania twornika V_Ua 1 0 DC Uan*kUa * dla nawrotu przyjac napiecie o przebiegu impulsowym *V_Ua 1 0 PULSE(Uan*kUa -Uan*kUa 0.6 0 0 0.8 5) * gdzie: V1=Ua; V2=-Ua; td=0.6s; trise=0s; tfall=0s; pw=0.8; per=5s ********************************** *napiecie zasilania wzbudzenia V_Uf 2 0 Ufn*kUf
Klasyczne wymuszenia mechaniczne (obciąŜenia na wale) dla maszyny prądu stałego mogą być o charakterze stałego lub zmiennego momentu obciąŜenia TL : np. zaleŜnego od czasu lub prędkości kątowej
maszyny (liniowo lub kwadratowo). Przykładowe momenty obciąŜenia moŜna zapisać następująco: • stały moment obciąŜenia o wartości zerowej
TL = 0
• stały moment obciąŜenia o wartości momentu znamionowego lub innej TL = TLn lub TL = kTL*TLn
gdzie, dla danej znamionowej mocy Pn i prędkości obrotowej nn
T PLn n rmn= / ω
ω πrmn = 2 60 nn /
kTL ≠ 1
• moment obciąŜenia zaleŜny liniowo od prędkości kątowej rmTLkLT ω ====
rmnLnTTLk ω/====
• moment obciąŜenia zaleŜny kwadratowo od prędkości kątowej rmrmTLkLT ωω ====
)/( rmnrmnLnTTLk ωω====
• moment obciąŜenia zaleŜny od czasu, np. zmieniający się skokowo (impulsowo) od wartości TL = 0 do TL = TLn
Do wprowadzenia wartości tych momentów obciąŜenia do programu PSPICE wykorzystuje się instrukcję definiującą źródła napięciowe niezaleŜne lub zaleŜne (jako analog momentu), którą ilustrują następujące przykłady:
*wspolczynniki do okreslenia momentu obciazenia .PARAM kTL=0 ; wspolczynnik dla stalego momentu *.PARAM kTL=TLn/Wrmn ;wspolczynnik dla TL=kTL*Wrm *.PARAM kTL=TLn/Wrmn/Wrmn ;wspolczynnik dla TL=kTL*Wrm*Wrm **************************** V_TL 3 0 DC TLn*kTL ; staly moment obciazenia na wale TL *moment obciazenia TL=kTL*Wrm *E_TL 3 0 VALUE=kTL*I(V_Wrm) *moment obciazenia TL=kTL*Wrm*Wrm *E_TL 3 0 VALUE=kTL*I(V_Wrm)*I(V_Wrm) *Uwaga: dla skokowej zmiany momentu TL przyjac *V_TL 3 0 PULSE(0 TLn*kTL 0.6 0 0 0.3 0.6) * gdzie: V1=0 Nm; V2=TL Nm; td=0.6s; trise=0s; tfall=0s; pw=0.3; per=0.6s
W badaniach stanów nieustalonych za pomocą programu PSPICE wykorzystuje się instrukcję analizy czasowej o następującym formacie:
.TRAN <krok wydruku (HWYDR)> <czas końca analizy (TSTOP) <czas opóźnienia drukowania +wyników (HNDR)> < maks. krok obliczeń (HMAX)> [UIC] gdzie, HWYDR - krok wydruku czyli odstęp czasowy wyprowadzania wyników obliczeń do zbioru
wynikowego z rozszerzeniem .OUT (jeŜeli zostanie uŜyta instrukcja .PRINT);

SILNIKI PRĄDU STAŁEGO. BADANIE CHARAKTERYSTYK DYNAMICZNYCH
TSTOP - czas analizy od czasu t = 0 s do t = TSTOP s określającego koniec obliczeń; HNDR - czas określający rozpoczęcie zapisu wyników do zbioru wynikowego z rozszerzeniem
.OUT (jeŜeli zostanie uŜyta instrukcja .PRINT) i zbioru wynikowego z rozszerzeniem
.DAT (jeŜeli zostanie uŜyta instrukcja .PROBE); HMAX - maks. krok obliczeń o wartości domyślnej = TSTOP/50 s - faktyczny krok obliczeń jest
dobierany automatycznie w trakcie trwania obliczeń; UIC - parametr oznacza, Ŝe do obliczeń będą brane warunki początkowe zapisane za pomocą
oddzielnej instrukcji .IC (INITIAL CONDITIONS) lub za pomocą wyraŜenia IC= , które jest podane w liniach określających indukcyjność (IC= prąd początkowy) lub pojemność (IC=napięcie początkowe).
Uwaga: W analizie maszyny elektrycznych, ze względu na moŜliwość wystąpienia oscylacji numerycznych (niestabilności rozwiązania w fazie obliczeń, kiedy maszyna wchodzi w stan pracy ustalonej), niedopuszczalne jest pomijanie w instrukcji .TRAN maks. kroku obliczeń HMAX. Szacowanie jego wartości naleŜy przeprowadzić w oparciu o stałe czasowe modelu obwodowego maszyny i okres wymuszeń na zaciskach maszyny (naleŜy zajrzeć do notatek z metod numerycznych!!!).
W badaniach stanów nieustalonych maszyny prądu stałego za pomocą programu PSPICE warunki początkowe ustala się dla wartości prądów i prędkości kątowej wirnika, odpowiadające wyjściowemu stanowi ustalonemu maszyny. Najłatwiej moŜna je ustalić dla analizy rozruchu maszyny — wartości prądów i prędkości kątowej wirnika są wtedy zerowe. Warunki początkowe zapisane w programie PSPICE ilustrują następujące przykłady:
*obwod twornika
Laa 5 6 Laa IC=0 ************************* *obwod wzbudzenia Lff 8 0 Lff IC=Ufn*kUf/Rf ;If=(Uf/Rf) ustalony prad wzbudzenia * dla silnika obcowzbudnego *Uwaga: dla silnika bocznikowego IC=0 bo If=0 ***************************** *obwod mechaniczny L_J 9 10 J IC=0 ; predkosc poczatkowa zerowa
Dla analizy innych stanów dynamicznych maszyny moŜna wykonać najpierw obliczenia dla rozruchu aŜ do wejścia maszyny w stan ustalony — od tego momentu zapisywać wyniki obliczeń do pliku .DAT. MoŜliwe jest takŜe obliczenie ręczne warunków początkowych dla zadanego stanu ustalonego wyjściowego maszyny. Dla analizy hamowania i nawrotu moŜna przyjąć wartość prędkości kątowej wirnika równą znamionowej lub idealnego biegu jałowego i załoŜyć zerowe wartości prądu twornika.
Analiza stanów dynamicznych maszyny za pomocą programu PSPICE wymaga określenia czasu trwania obliczeń TSTOP — czasu określającego koniec obliczeń. Czas ten — w przypadku rozruchu bezpośredniego bez obciąŜenia — moŜna w przybliŜeniu oszacować w oparciu o tzw. stałą rozruchową maszyny τr :
TSTOP ≥ =τ ωr n rmJ T( / ) 0 która jak widać określa czas rozruch maszyny (układu) o momencie bezwładności J pod wpływem momentu znamionowego maszyny Tn od zera do prędkości biegu jałowego ωrm0 .
Do wyprowadzania wyników analizy w programie PSPICE słuŜy instrukcja .PROBE. Przykłady uŜycia instrukcji .TRAN oraz .PROBE w programie PSPICE ilustrują następujące przykłady:
*symulacja charakterystyk rozruchowych .TRAN 0.004 0.6 0 0.002 UIC *obliczone przebiegi do obserwacji na ekranie .PROBE V(1) I(Ra) V(6) V(2) I(Rf) V(9) I(R_Bm) V(3)
♦ Plik wsadowy programu PSPICE: SPS_1.CIR
W oparciu o analog elektryczny silnika prądu stałego na rys. 7 oraz powyŜsze rozwaŜania, sformułowano następujący plik wsadowy programu PSPICE.

M. Ronkowski, G. Kostro, M. Michna 13
ROZRUCH SILNIKA PRADU STALEGO (OBCOWZBUDNEGO) przy TL=0 *Dane znamionowe (indeks n oznacza wartosci znamionowe) silnika: * Pn=13kW - moc; Uan=220V - napiecie twronika; * Ian=67.7A - prad twornika; Pfn=186W - moc wzbudzenia; * Ufn=110V - napiecie wzbudzenia; Ra=0.33 ohm - rezystancja twronika * Laa=0.204H - indukcyjnosc twronika; nn=1500obr/min - predkosc obrotowa; * J=0.11kgm2 - moment bezwladnosci * wprowadzanie danych poprzez paramerty globalne .PARAM Pn=13e3 Uan=220 Ian=67.7 Pfn=186 Ufn=110 .PARAM Ra=0.4 Laa=0.02 nn=1500 J=0.11 *stale .PARAM pi=3.14159 *Obliczenia brakujacych danych i parametrow modelu silnika .PARAM Ifn=Pfn/Ufn Rf=Ufn/Ifn Wrmn=2*pi*nn/60 *znamionowy moment obciazenia .PARAM TLn=Pn/Wrmn * obliczanie indukcyjnosci rotacji .PARAM Gaf=(Uan - Ian*Ra)/Ifn/Wrmn *przyjeto indukcyjnosc obwodu wzbudzenia Lff>=20*Laa*Rf/Ra .PARAM Lff=20*Laa*Rf/Ra *przyjeto wspolczynnik tarcia Bm=(0.01*Pn/Wrmn/Wrmn) Nms/rad .PARAM Bm=(0.01*Pn/Wrmn/Wrmn) *wspolczynniki do okreslenia napiecie zasilania twornika i wzbudzenia, .PARAM kUa=1 kUf=1 *wspolczynniki do okreslenia rezystancji twornika .PARAM kRa=1 *wspolczynniki do okreslenia momentu obciazenia .PARAM kTL=0 ; wspolczynnik dla stalego momentu *.PARAM kTL=TLn/Wrmn ;wspolczynnik dla TL=kTL*Wrm *.PARAM kTL=TLn/Wrmn/Wrmn ;wspolczynnik dla TL=kTL*Wrm*Wrm *obwod twornika *napiecie zasilania twornika V_Ua 1 0 DC Uan*kUa * dla nawrotu przyjac napiecie o przebiegu impulsowym *V_Ua 1 0 PULSE(Uan*kUa -Uan*kUa 0.6 0 0 0.8 5) * gdzie: V1=Ua; V2=-Ua; td=0.6s; trise=0s; tfall=0s; pw=0.8; per=5s V_Ia 1 4 DC 0V ;pomiar pradu Ia Ra 4 5 Ra*kRa Laa 5 6 Laa IC=0 *SEM rotacji E_Ea 6 0 VALUE=Gaf*I(V_If)*I(V_Wrm) ;bo Ea=Gaf*If*Wrm *obwod wzbudzenia *napiecie zasilania wzbudzenia *tylko dla silnika obcowzbudnego mozna pominac cztery kolejne linie V_Uf 2 0 Ufn*kUf V_If 2 7 DC 0V ;pomiar pradu If Rf 7 8 Rf Lff 8 0 Lff IC=Ufn*kUf/Rf ;If=(Uf/Rf) ustalony prad wzbudzenia * dla silnika obcowzbudnego *Uwaga: dla silnika bocznikowego IC=0 bo If=0 *obwod mechaniczny *analog momentu elektromagnetycznego E_Te 9 0 VALUE=Gaf*I(V_If)*I(V_Ia); bo Te=Gaf*If*Ia L_J 9 10 J IC=0 ; predkosc poczatkowa zerowa R_Bm 10 11 Bm V_Wrm 11 3 DC 0V ;pomiar predkosci katowej Wrm V_TL 3 0 DC TLn*kTL ; staly moment obciazenia na wale TL

SILNIKI PRĄDU STAŁEGO. BADANIE CHARAKTERYSTYK DYNAMICZNYCH
*moment obciazenia TL=kTL*Wrm *E_TL 3 0 VALUE=kTL*I(V_Wrm) *moment obciazenia TL=kTL*Wrm*Wrm *E_TL 3 0 VALUE=kTL*I(V_Wrm)*I(V_Wrm) *Uwaga: dla skokowej zmiany momentu TL przyjac *V_TL 3 0 PULSE(0 TLn*kTL 0.6 0 0 0.3 0.6) * gdzie: V1=0 Nm; V2=TL Nm; td=0.6s; trise=0s; tfall=0s; pw=0.3; per=0.6s *Uwaga: dla analizy .DC pominac V_TL * dla analizy .DC :charakterystyka Te=Te(Wrm) * podstawic I_Wrm zamiast V_TL *I_Wrm 3 0 DC 0A *analiza wplywu momentu bezwladnosci dla J=0.11 J=3*0.11 J=6*0.11 * na dynamike silnika .STEP PARAM J LIST 0.11 0.33 0.66 .PROBE V(1) I(Ra) V(6) V(2) I(Rf) V(9) I(R_Bm) V(3) *analiza .TRAN dla wyznaczenia charakterystyk rozruchowych .TRAN 0.004 0.6 0 0.002 UIC *krok druku, czas koncowy, czas poczt. druku, max krok calkowania, wyk. war. *pocz. *analiza .DC :wyznaczenie charakterystyki Te=Te(Wrm) dla Ua=180V i Ua=220; *.DC LIN I_Wrm 0 200 10 V_Ua 140 220 40 *skala liniowa, zmienna, zakres dolny, zakres gorny, krok, druga zmienna, zakres dolny, zakres *gorny, krok .END
♦ Wyniki symulacji wybranych stanów dynamicznych silnika
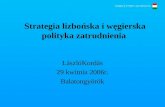
• Stan ustalony Interesującą charakterystyką stanu ustalonego jest charakterystyka mechaniczna Te=Te(Ωrm).
MoŜna ją wyznaczyć za pomocą analizy stałoprądowej .DC symulatora PSPICE (plik wsadowy SPS_2.cir). Jej przebieg pokazano na rys. 8.
Wyniki analizy .DC (postprocesor graficzny .PROBE)
0 50 100 150 200
I_WrmV(9)
800
600
400
200
0
-200
-400
Ua=180 [V]
Ua=220 [V]
Wrm [rad/s]
Te [Nm]
CHARAKTERYSTYKI SILNIKA PRADU STALEGO (OBCOWZBUDNEGO) Te=Te(Wrm)Date/Time run: 03/17/93 21:12:17 Temperature: 27.0
Rys.8. Wyniki analizy .DC: charakterystyka mechaniczna Te=Te(Ωrm) silnika

M. Ronkowski, G. Kostro, M. Michna 15
• Stan nieustalony
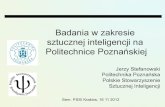
Interesującą charakterystyką stanu nieustalonego jest charakterystyka rozruchowa. MoŜna ją wyznaczyć za pomocą analizy stanu nieustalonego .TRAN symulatora PSPICE. Jej przykładowe przebiegi pokazano na rys.9. Charakterystykę dynamiczną Te=Te(ωrm) pokazano na rys.10.
Wyniki analizy .TRAN (postprocesor graficzny .PROBE)
a)
0s 100ms 200ms 300ms 400ms 500ms 600ms
Time1 2 1 V(1) 2 I(Ra)
250V
200V
150V
100V
50V
0V
1 300A
200A
100A
0A
-100A
2
>>
ROZRUCH SILNIKA PRADU STALEGO (OBCOWZBUDNEGO) DLA Tl=0Date/Time run: 03/17/93 20:29:50 Temperature: 27.0
b)
0s 100ms 200ms 300ms 400ms 500ms 600ms
Time1 2 1 V(9) 2 I(R_Bm)
400
300
200
100
0
-100
-200
1 300
250
200
150
100
50
0
2
>>
Wrm [rad/s]
Te [Nm]
ROZRUCH SILNIKA PRADU STALEGO (OBCOWZBUDNEGO) DLA Tl=0Date/Time run: 03/17/93 20:29:50 Temperature: 27.0
Rys.9. Wyniki analizy .TRAN: rozruch bezpośredni silnika prądu stałego:
a) przebieg napięcia ua oraz prądu ia twornika b) przebieg prędkości kątowej ωrm oraz momentu elektromagnetycznego Te

SILNIKI PRĄDU STAŁEGO. BADANIE CHARAKTERYSTYK DYNAMICZNYCH
0 40 80 120 160 200 240
I(R_Bm)V(9)
400
300
200
100
0
-100
-200
Wrm [rad/s]
Te [Nm]
ROZRUCH SILNIKA PRADU STALEGO (OBCOWZBUDNEGO) DLA Tl=0Date/Time run: 03/17/93 20:29:50 Temperature: 27.0
Rys.10. Wyniki analizy .TRAN: charakterystyka dynamiczna Te=Te(ωrm) silnika prądu stałego dla rozruchu
bezpośredniego
5. PYTANIA (TEORIA/SYMULACJA) 1. Podaj elementarny (podstawowy) model fizyczny maszyny prądu stałego z ilustracją zasady jej działania
— generacji momentu elektromagnetycznego (rys. 1 wg instrukcji ćw. 2A). Nazwij elementy i wielkości modelu. WykaŜ, Ŝe w stanie ustalonym siły magnetomotoryczne (SMM) stojana i wirnika są nieruchome względem siebie oraz nieruchome względem stojana.
2. Podaj podstawowy model fizyczny wzorcowego sprzęŜenia elektromechanicznego — maszyny prądu stałego (rys. 2 wg instrukcji ćw. 2A). Nazwij i uzasadnij sens fizyczny wielkości i parametrów modelu.
3. Podaj elementarny (podstawowy) model fizyczny układy mechanicznego maszyn elektrycznych (rys. 2 wg instrukcji ćw. 2A). Wymień i nazwij siły działające na wirnik maszyny. Podaj analogie elektryczno-mechaniczne równania ruchu stosowane w modelowaniu obwodowym układu mechanicznego maszyn (rys. 4 wg instrukcji ćw. 2A).
4. Podaj dynamiczny model obwodowy (analog elektryczny) maszyny (silnika) prądu stałego — wzorcowego sprzęŜenia elektromechanicznego (rys. 5 wg instrukcji ćw. 2A). Nazwij i uzasadnij sens fizyczny wielkości i parametrów modelu.
5. Podaj zredukowany dynamiczny model obwodowy (analog elektryczny) maszyny (silnika) prądu stałego — wzorcowego sprzęŜenia elektromechanicznego przy i f=const (rys. 6 wg instrukcji ćw. 2A). Nazwij i uzasadnij sens fizyczny wielkości i parametrów modelu. Podaj stałe czasowe i warunki stabilności przebiegów dynamicznych silnika prądu stałego.
6. Podaj analog elektryczny silnika prądu stałego (rys. 7 wg instrukcji ćw. 2A), który słuŜy do sformułowania pliku wsadowego programu PSPICE’a, celem symulacji rozruchu silnika indukcyjnego. Nazwij wielkości i parametry analogu
7. Podaj sposób wprowadzania w pliku wsadowym programu PSPICE’a wartości parametrów analogu elektrycznego silnika prądu stałego (rys. 7 wg instrukcji ćw. 2A), celem symulacji rozruchu silnika.
8. Podaj sposób odwzorowania w pliku wsadowym programu PSPICE’a równania napięcia rotacji i równania momentu elektromagnetycznego analogu elektrycznego silnika prądu stałego (rys. 7 wg instrukcji ćw. 2A), celem symulacji rozruchu silnika.
9. Podaj sposób wprowadzania w pliku wsadowym programu PSPICE’a warunków początkowych analogu elektrycznego silnika prądu stałego (rys. 7 wg instrukcji ćw. 2A), celem symulacji rozruchu silnika.
10. Podaj sposób wprowadzania w pliku wsadowym programu PSPICE’a wymuszeń elektrycznych analogu elektrycznego silnika prądu stałego (rys. 7 wg instrukcji ćw. 2A), celem symulacji rozruchu silnika.

M. Ronkowski, G. Kostro, M. Michna 17
11. Podaj sposób wprowadzania w pliku wsadowym programu PSPICE’a wymuszeń mechanicznych analogu elektrycznego silnika prądu stałego (rys. 7 wg instrukcji ćw. 2A), celem symulacji rozruchu silnika.
12. Podaj sposób doboru maksymalnego kroku całkowania i czasu trwania obliczeń (maksymalnego kroku obliczeń HMAX i czasu TSTOP w komendzie .TRAN) w pliku wsadowym programu PSPICE’a dla analogu elektrycznego silnika prądu stałego (rys. 7 wg instrukcji ćw. 2A), celem symulacji rozruchu silnika.
6. ZADANIE Dla danych silnika prądu stałego (z katalogu lub silnika badanego) wykonać analizę .TRAN:
Nr zada.
Stan pracy dynamicznej silnika i warunki obciąŜenia Warunki początkowe
1 rozruch bezpośredni dla J = 1.5Jn oraz Jn przy TL = 0 zerowe wartości prądów i prędkości wirnika dla t = 0
2 rozruch bezpośredni dla J = 1.5Jn oraz Jn przy TL = kTL*ωrm zerowe wartości prądów i prędkości wirnika dla t = 0
3 rozruch bezpośredni dla J = 1.5Jn oraz Jn przy TL = kTL*ωrm*ωrm zerowe wartości prądów i prędkości wirnika dla t = 0
4 skokowa zmiana TL = 0 do TL = TLn dla J = 1.5Jn oraz Jn wartości prądów maszyny i prędkości wirnika jak dla stanu biegu jałowego dla t = 0
5 hamowanie i nawrót dla J = 1.5Jn oraz Jn przy TL = 0 zerowe wartości prądów oraz ωrm= ωrmn dla t = 0
6 hamowanie i nawrót dla J = 1.5Jn oraz Jn przy TL = kTL *ωrm zerowe wartości prądów oraz ωrm= ωrmn dla t = 0
7 hamowanie i nawrót dla J = 1.5Jn oraz Jn przy TL = k*ωrm*ωrm zerowe wartości prądów oraz ωrm= ωrmn dla t = 0
ZałoŜyć znamionowe warunki zasilania lub podane przez prowadzącego ćwiczenie.
7. SPRAWOZDANIE Opracowanie sprawozdania powinno zawierać:
• stronę tytułową wg następującego układu: POLITECHNIKA GDAŃSKA
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI KATEDRA ENERGOELEKTRONIKI I MASZYN
ELEKTRYCZNYCH SYSTEMY ELEKTROMECHANICZNE
PROJKET Kierunek Elektrotechnika Studia stacjonarne 2-ego stopnia, semestr 1 ĆWICZENIE (SPS) BADANIE DYNAMIKI SILNIKI PRĄDU STAŁEGO ZASTOSOWANIE SYMULATORA OBWODÓW PSPICE Opracował: Imię i nazwisko nr grupy laboratoryjnej (podać nr grupy laboratoryjnej wg lab. SE) data oddania sprawozdania
• nr, dane znamionowe (katalogowe) i dane obwodowe badanego silnika prądu stałego; • nr i treść zadania;

SILNIKI PRĄDU STAŁEGO. BADANIE CHARAKTERYSTYK DYNAMICZNYCH
• określenie wymuszeń elektrycznych i mechanicznych (naleŜy podać odpowiadające im fragmenty programu PSPICE);
• określenie warunków początkowych (wartości prądów indukcyjności i napięć na pojemnościach, naleŜy podać odpowiadające im fragmenty programu PSPICE);
• obliczenia stałych czasowych modelu obwodowego dla danego silnika indukcyjnego; • oszacowanie maks. kroku obliczeń HMAX i czasu końca analizy TSTOP; • „ręczne” oszacowanie wartości udarowych prądów, momentu elektromagnetycznego i prędkości
obrotowej oraz porównanie ich wartości z wynikami otrzymany na drodze symulacyjnej; • wybrane przebiegi wielkości, które są istotne (wg piszącego sprawozdanie) dla przeprowadzenia
analizy zadanego stanu pracy dynamicznej maszyny prądu stałego; • uzasadnienie fizyczne uzyskanych wyników (powinno być napisane w stylu inŜynierskim !!!
—- tzn. minimum języka tekstowego a maksimum języka graficznego i symbolicznego); • krótka dyskusja wpływu załoŜeń upraszczających modelu maszyny na uzyskane wyniki obliczeń; • wykaz literatury wykorzystanej przy pisaniu sprawozdania; • załącznik w postaci dyskietki, zawierającej sformułowany plik wsadowy programu PSPICE.
8. LITERATURA 1. S. Bolkowski: Stany nieustalone w obwodach elektrycznych. WNT, Warszawa, 1976. 2. R.H. Cannon (jr.): Dynamika układów fizycznych. WNT, Warszawa, 1973. 3. P.C. Krause i O. Wasynczuk: Electromechanical Motion Devices, Mc Graw -Hill Book Comp.. New
York, 1989. Purdue University, USA. 4. P.C. Krause: Analysis of Electric Machinery. Mc Graus - Hill Book Comp. New York, 1986. 5. W. Latek: Teoria maszyn elektrycznych. WNT, Warszawa, 1982. 6. Z. Manitius: Maszyny elektryczne cz. I, II. Skrypt PG, 1982, 1984. 7. W. Paszek: Stany nieustalone maszyn elektrycznych prądu przemiennego. WNT, Warszawa, 1986. 8. Ronkowski M., Michna M., Kostro G., Kutt F.: Maszyny elektryczne wokół nas: zastosowanie,
budowa, modelowanie, charakterystyki, projektowanie. (e-skrypt). Wyd. PG, Gdańsk, 2011. http://pbc.gda.pl/dlibra/docmetadata?id=16401&from=&dirids=1&ver_id=&lp=2&QI=
9. M. Ronkowski: Szkice do wykładów z przedmiotu Systemy elektromechaniczne. Katedra Energoelektroniki i Maszyn Elektrycznych. WEiA. PG, Gdańsk, 2001. (www.ely.pg.gda.pl/ e-mechatronika).
10. S. Roszczyk: Teoria maszyn elektrycznych. WNT, Warszawa, 1979. 11. P. Zimny, K. Karwowski: SPICE klucz do elektrotechniki. Instrukcja, program, przykłady. Skrypt
PG, 1993.
9. ZAŁĄCZNIK
Wyznaczanie wartości parametrów modelu liniowego silnika prądu stałego na podstawie danych katalogowych
Metody wyznaczania wartości parametrów dynamicznego modelu obwodowego silnika prądu stałego (podanego na rys. Z1) opisano poniŜej.

M. Ronkowski, G. Kostro, M. Michna 19
ua
a Ra Laa
iaea
ea = Gaf if ωrm
Lff
if
Rf
uf
f
+
_
+
_
+_
Te = Gaf if ia
+
_TL
muc = ωrm
G = 1/BmTe C = J
Rys.Z1. Dynamiczny model obwodowy (analog elektryczny) maszyny (silnika) prądu stałego — wzorcowego sprzęŜenia
elektromechanicznego
1. Wielkości modelu na rys. Z1. ua - napięcie twornika
uf - napięcie wzbudzenia
ia - prąd twornika
if - prąd wzbudzenia
ea - sem rotacji
Te - moment elektromagnetyczny (wewnętrzny)
ωrm - prędkość kątowa (mechaniczna) wirnika
TL - moment obciąŜenia (zewnętrzny)
2. Parametry modelu na rys. Z1. Ra - rezystancja obwodu twornika
Rf - rezystancja obwodu wzbudzenia
Laa - indukcyjność własna obwodu twornika
Lff - indukcyjność własna obwodu wzbudzenia
Gaf - indukcyjność rotacji (sprzęŜenia elektromechanicznego)
J - moment bezwładności Bm - współczynnik tarcia lepkiego
WyróŜniono dwa przypadki wyznaczania wartości parametrów dynamicznego modelu obwodowego silnika prądu stałego:
♦ modelu liniowego (modelu o parametrach stałych) na podstawie danych katalogowych; ♦ modelu nieliniowego (modelu o parametrach zmiennych) na podstawie danych doświadczalnych.
Wartości parametrów modelu obwodowego silnika moŜna obliczyć z wystarczającą dokładnością dla obliczeń inŜynierskich na podstawie jej danych katalogowych. Przykład takich danych podano poniŜej w tablicy Tab. Z.1.
Tablica Z.1. Dane katalogowe silników prądu stałego – producent firma SIEMES

SILNIKI PRĄDU STAŁEGO. BADANIE CHARAKTERYSTYK DYNAMICZNYCH
Wielkość Uan nn Pn J Ian ηn Pfn Ufn Ra Laa
mechaniczna V obr/min kW kgm2 A % W V Ω mH
100L 300 1850 1,25 0,0115 5 75 145 180 4,6 42
112L 400 2700 4,6 0,0301 13,5 83 130 180 1,97 16
160M 400 3500 19,2 0,121 54,0 86 480 180 0,13 2
225L 440 2300 38,0 0,65 94,0 90,4 650 310 0,15 2,3
225L 600 2950 136,0 0,75 245 91,1 800 310 0,12 1,5
W powyŜszej tabeli producent podał wartości tylko dla części parametrów (J, Ra, Laa) - wartości pozostałych parametrów wyznacza się wg podanych niŜej zaleŜności.
Indukcyjno ść rotacji
wyznacza się z równania równowagi dla obwodu twornika przy warunkach znamionowych:
anamnrfnafan IRIGU += )( Ω [V] (1)
po przekształceniu otrzymuje się ) /()( mnrfnanaanaf IIRUG Ω−= [H] (2)
gdzie, znamionowy prąd wzbudzenia
fnfnfn UPI /==== [A] (3)
oraz znamionowa prędkość kątowa [rad/s] Ω rmn nn= 2 60π / [rad/s] (4) Rezystancja obwodu wzbudzenia
fnfnf PUR /2= [Ω] (5)
Współczynnik tarcia lepkiego
2mnr
mnm
PB
Ω∆≅ [Nm.s] (6)
gdzie, znamionowe strat mechaniczne szacuje się następująco
nmn PP100
)% 1...3,0(≅∆ [W] (7)
Elektromagnetyczna stała czasowa (stała czasowa obwodu twornika)
aaaa RL /====τ [s] (8)
Elektromechaniczna stała czasowa
2)( fnaf
am IG
J R=τ [s] (9)
Indukcyjno ści obwodu wzbudzenia ze względu na jej brak w danych katalogowych, szacuje się z następującej relacji między stałą czasową obwodu wzbudzenia ( ffff RL /====τ ) a elektromagnetyczną stałą czasową (stała czasowa obwodu
twornika) τ τf a≥ 20 lub aaafff RLRL / 20/ = (10)
zatem
afaaff RRLL /20≥ [H] (11)
Uwaga :

M. Ronkowski, G. Kostro, M. Michna 21
PowyŜsza relacja jest słuszna dla silnika o napięciu twornika takim samym jak napięcie wzbudzenia. W przypadku róŜnych napięć naleŜy wyznaczyć wartość indukcyjności wg relacji (11), a następnie skorygować jej wartość do poziomu danego napięcia wzbudzenia, zakładając, Ŝe energia pola magnetycznego obwodu wzbudzenia jest taka sama w obu przypadkach.
Indukcyjno ść obwodu twornika
w przypadku braku jej wartości w danych katalogowych, moŜna oszacować następująco:
nan
anaaa nPI
UcL
120≅ [H] (12)
gdzie, stała ca przyjmuje wartości:
• w przedziale 0,05...0,07 - dla maszyn bez uzwojenia kompensacyjnego; • około 0,032 - dla maszyn z uzwojeniem kompensacyjnym.
Uwaga: P – oznacza liczbę biegunów maszyny!.
PYTANIA
1. Podaj sposób wyznaczania wartości parametrów dynamicznego modelu obwodowego silnika prądu stałego (rys. 5 wg instrukcji ćw.) na podstawie jego danych katalogowych.