Podział transportu - Zespół MRNiS · Suwnice Pomostowe Bramowe Dwudźwigarowe Jednodźwigarowe...
90
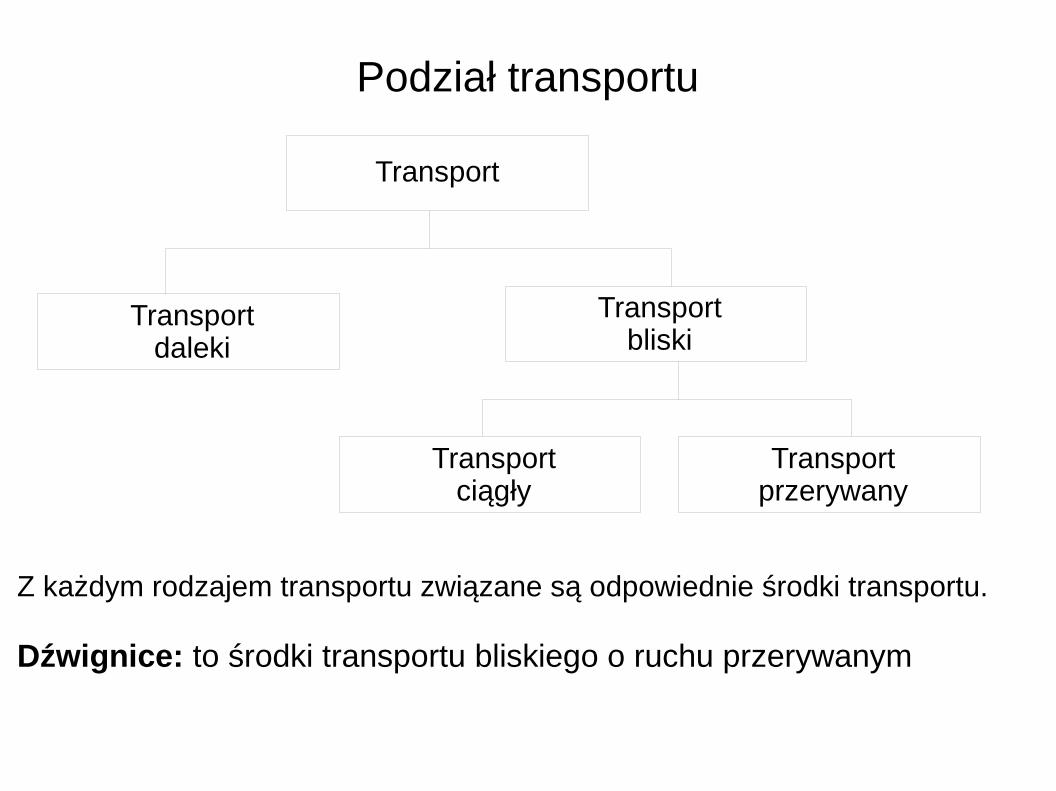
Podział transportu Transport Transport daleki Transport bliski Transport ciągły Transport przerywany Z każdym rodzajem transportu związane są odpowiednie środki transportu. Dźwignice: to środki transportu bliskiego o ruchu przerywanym
Transcript of Podział transportu - Zespół MRNiS · Suwnice Pomostowe Bramowe Dwudźwigarowe Jednodźwigarowe...
Podział transportu
Transport
Transportdaleki
Transportbliski
Transportciągły
Transportprzerywany
Z każdym rodzajem transportu związane są odpowiednie środki transportu.
Dźwignice: to środki transportu bliskiego o ruchu przerywanym
Przykłady typowych dźwignic:
-Suwnice
-Żurawie
-Dźwigi pionowe
DŹWIGNICE - DEFINICJE
• Dźwignica – maszyna o pracy przerywanej, przeznaczona do podnoszenia i przemieszczania ładunków w przestrzeni za pomocą haka lub innego urządzenia chwytającego.
Cięgnik – dźwignica przeznaczona do przemieszczania ładunków za pośrednictwem cięgna zakończonego urządzeniem chwytającym
Suwnica – dźwignica, w której urządzenie chwytające jest podwieszone do wciągarki przejezdnej, wciągnika lub żurawia przemieszczających się po moście
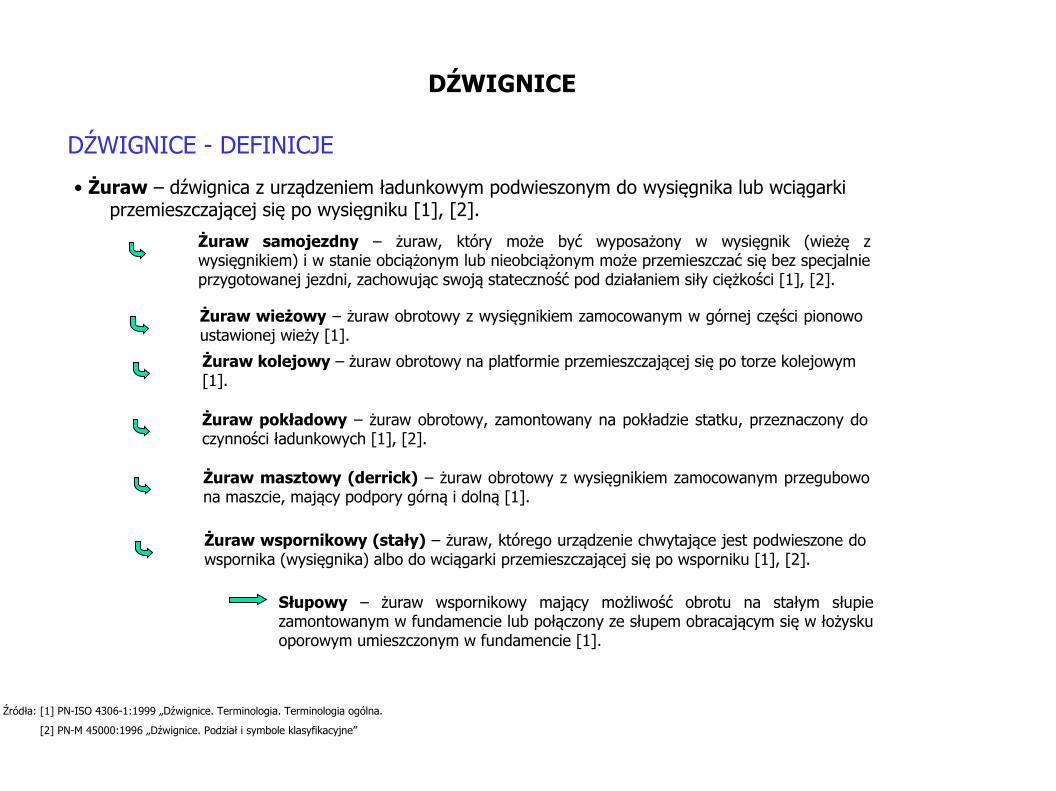
Żuraw – dźwignica z urządzeniem chwytającym (ładunkowym) podwieszonym do wysięgnika lub wciągarki przemieszczającej się po wysięgniku
Układnica – dźwignica, w której ustrój nośny stanowi przejezdny słup lub rama, po których przesuwa się wodzak – przeznaczona do składowania ładunków w magazynie
Dźwignik – dźwignica przeznaczona do prostoliniowego przemieszczania ładunków w pionie lub prawie w pionie za pomocą sztywnego elementu (zębatka, śruba, tłok)
Wyciąg towarowy – dźwignica składająca się z podstawy ładunkowej prowadzonej w pochyłych prowadnicach przystosowanej do pochyłego przemieszczania ładunków za pomocą cięgników linowych lub łańcuchowych, podstawą ładunkową mogą być wózek, kosz, itp.
Dźwignica linotorowa – dźwignica z urządzeniem chwytającym lub ładunkowym podwieszonym do wodzarki przemieszczającej się po linie nośnej zamocowanej na podporach
DŹWIGNICE
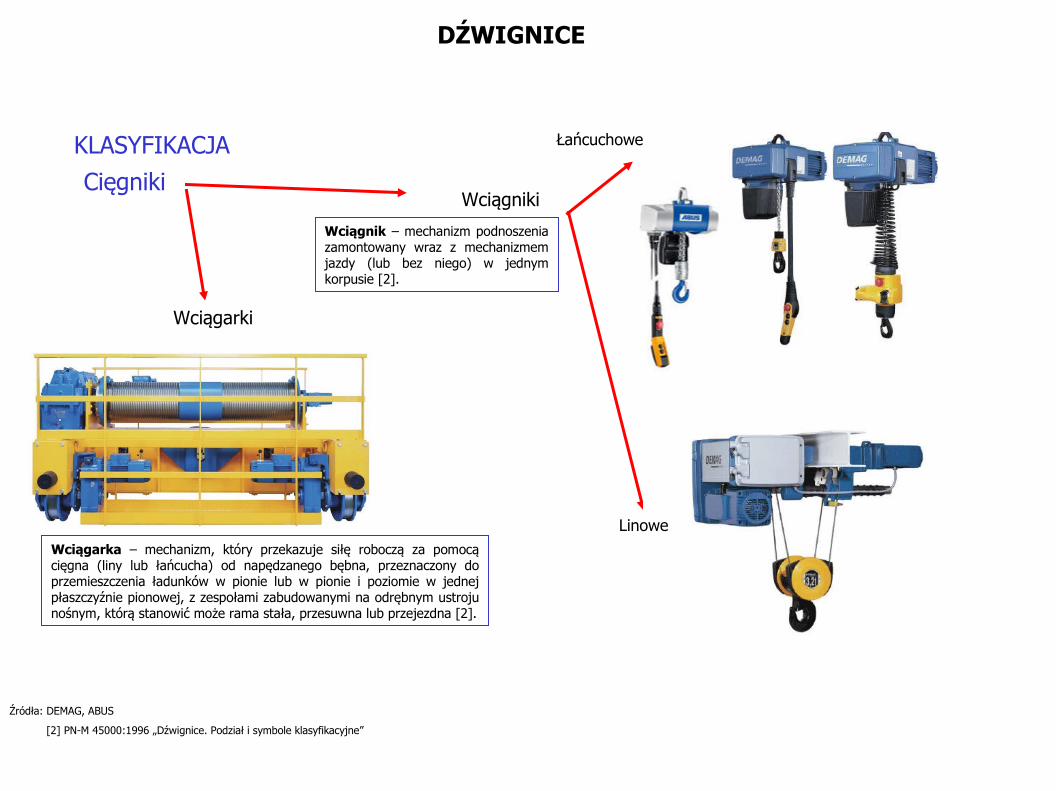
KLASYFIKACJA
CięgnikiWciągniki
Łańcuchowe
Linowe
Wciągarki
Źródła: DEMAG, ABUS
[2] PN-M 45000:1996 „Dźwignice. Podział i symbole klasyfikacyjne”
Wciągarka – mechanizm, który przekazuje siłę roboczą za pomocą cięgna (liny lub łańcucha) od napędzanego bębna, przeznaczony do przemieszczenia ładunków w pionie lub w pionie i poziomie w jednej płaszczyźnie pionowej, z zespołami zabudowanymi na odrębnym ustroju nośnym, którą stanowić może rama stała, przesuwna lub przejezdna [2].
Wciągnik – mechanizm podnoszenia zamontowany wraz z mechanizmem jazdy (lub bez niego) w jednym korpusie [2].
DŹWIGNICE
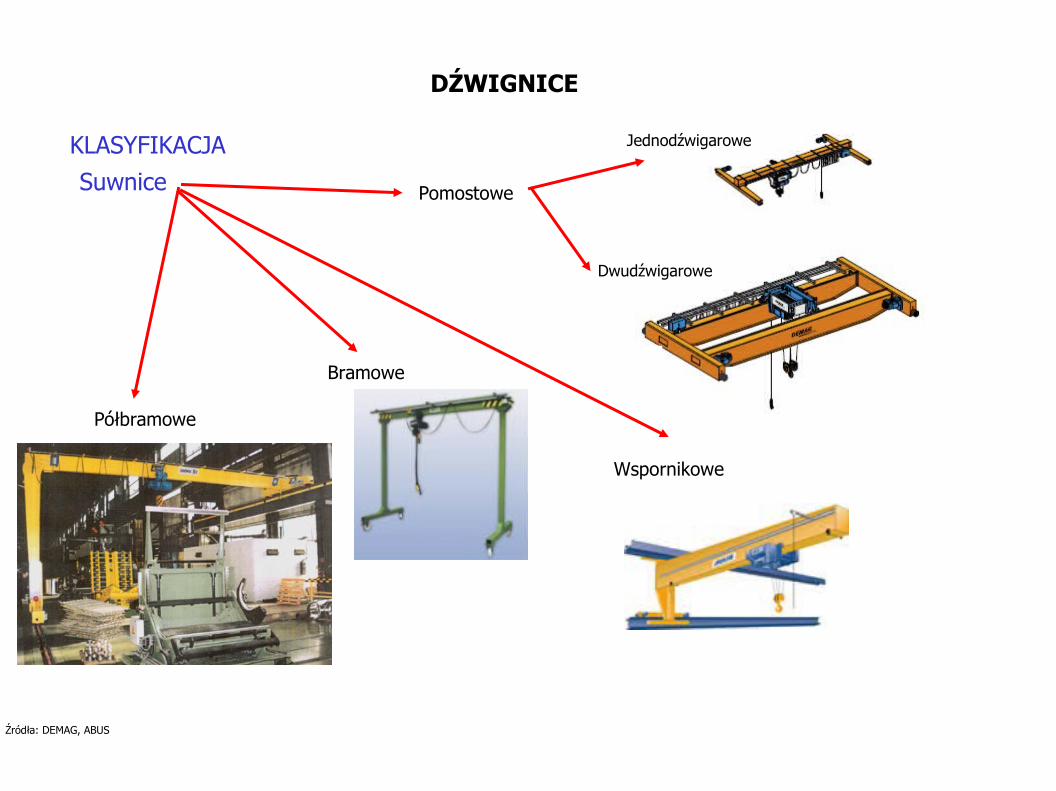
KLASYFIKACJA
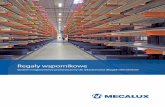
Suwnice Pomostowe
Bramowe
Dwudźwigarowe
Jednodźwigarowe
Wspornikowe
Półbramowe
Źródła: DEMAG, ABUS
DŹWIGNICE
DŹWIGNICE - DEFINICJE
• Suwnica – dźwignica, w której urządzenie chwytające jest podwieszone do wciągarki przejezdnej, wciągnika lub żurawia przemieszczających się po moście [1], [2].
Źródła: [1] PN-ISO 4306-1:1999 „Dźwignice. Terminologia. Terminologia ogólna.
[2] PN-M 45000:1996 „Dźwignice. Podział i symbole klasyfikacyjne”
Suwnica pomostowa – suwnica, której most opiera się bezpośrednio na torze jezdnym [1], [2].
Suwnica bramowa – suwnica, której nośna część konstrukcji (most) opiera się na torze jezdnym za pomocą podpór [1], [2].
Suwnica półbramowa – suwnica, której nośna część konstrukcji (most) opiera się na torze jezdnym z jednej strony bezpośrednio a z drugiej za pomocą podpory [1], [2].
Suwnica wspornikowa – suwnica, której część konstrukcji nośnej ma kształt wspornika [2].
DŹWIGNICE
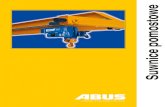
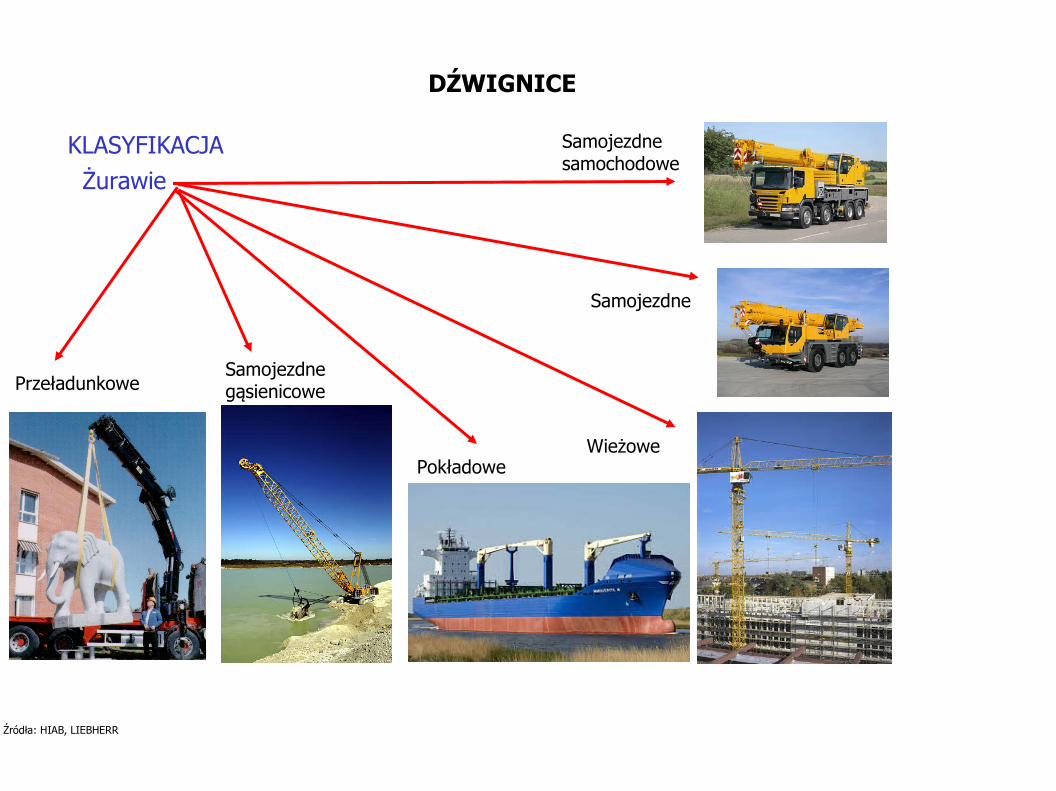
KLASYFIKACJAŻurawie
Samojezdne samochodowe
Samojezdne
Wieżowe
Przeładunkowe
Źródła: HIAB, LIEBHERR
Samojezdne gąsienicowe
Pokładowe
DŹWIGNICE
DŹWIGNICE - DEFINICJE
• Żuraw – dźwignica z urządzeniem ładunkowym podwieszonym do wysięgnika lub wciągarki przemieszczającej się po wysięgniku [1], [2].
Źródła: [1] PN-ISO 4306-1:1999 „Dźwignice. Terminologia. Terminologia ogólna.
[2] PN-M 45000:1996 „Dźwignice. Podział i symbole klasyfikacyjne”
Żuraw samojezdny – żuraw, który może być wyposażony w wysięgnik (wieżę z wysięgnikiem) i w stanie obciążonym lub nieobciążonym może przemieszczać się bez specjalnie przygotowanej jezdni, zachowując swoją stateczność pod działaniem siły ciężkości [1], [2].
Żuraw wieżowy – żuraw obrotowy z wysięgnikiem zamocowanym w górnej części pionowo ustawionej wieży [1].
Żuraw kolejowy – żuraw obrotowy na platformie przemieszczającej się po torze kolejowym [1].
Żuraw pokładowy – żuraw obrotowy, zamontowany na pokładzie statku, przeznaczony do czynności ładunkowych [1], [2].
Żuraw masztowy (derrick) – żuraw obrotowy z wysięgnikiem zamocowanym przegubowo na maszcie, mający podpory górną i dolną [1].
Żuraw wspornikowy (stały) – żuraw, którego urządzenie chwytające jest podwieszone do wspornika (wysięgnika) albo do wciągarki przemieszczającej się po wsporniku [1], [2].
Słupowy – żuraw wspornikowy mający możliwość obrotu na stałym słupie zamontowanym w fundamencie lub połączony ze słupem obracającym się w łożysku oporowym umieszczonym w fundamencie [1].
DŹWIGNICE
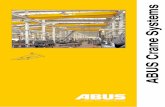
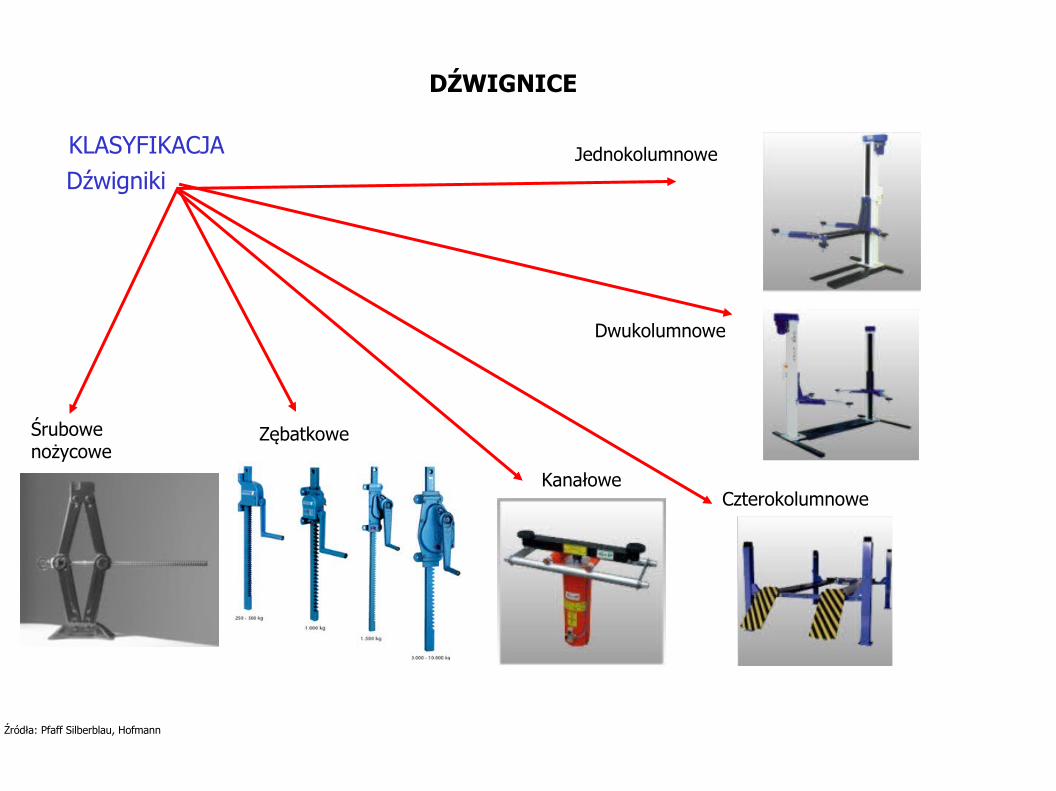
KLASYFIKACJADźwigniki
Jednokolumnowe
Dwukolumnowe
Czterokolumnowe
Śrubowe nożycowe
Źródła: Pfaff Silberblau, Hofmann
Zębatkowe
Kanałowe
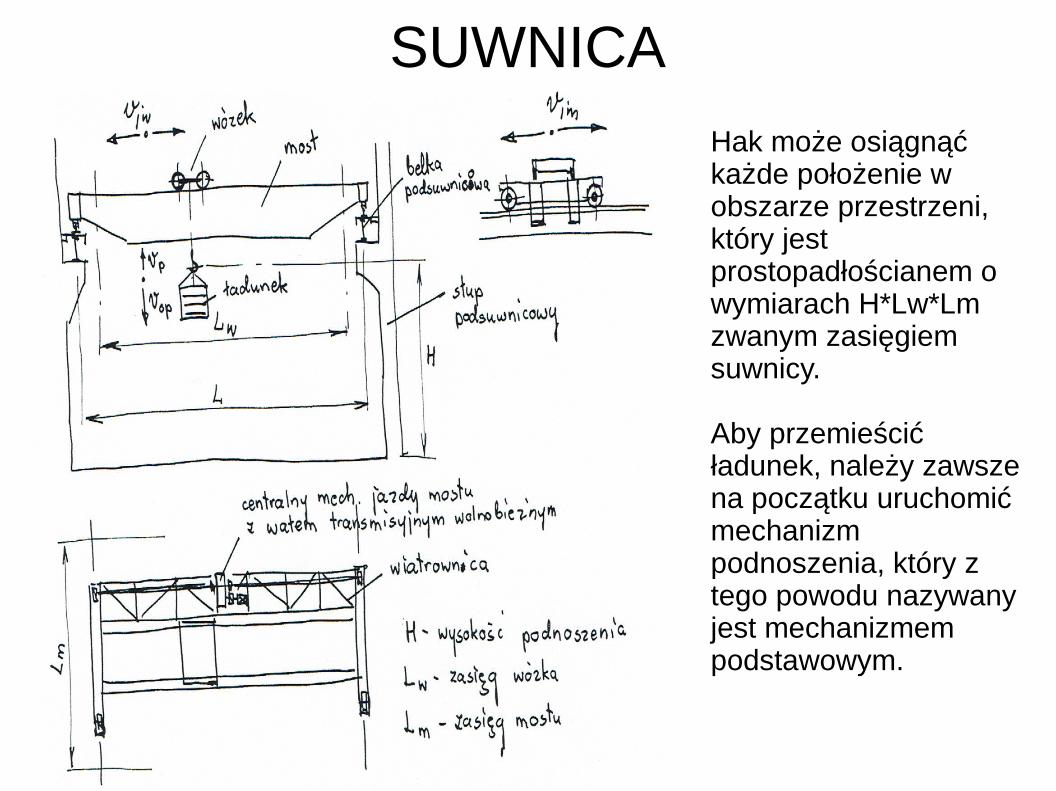
SUWNICA
Hak może osiągnąć każde położenie w obszarze przestrzeni, który jest prostopadłościanem o wymiarach H*Lw*Lm zwanym zasięgiem suwnicy.
Aby przemieścić ładunek, należy zawsze na początku uruchomić mechanizm podnoszenia, który z tego powodu nazywany jest mechanizmem podstawowym.
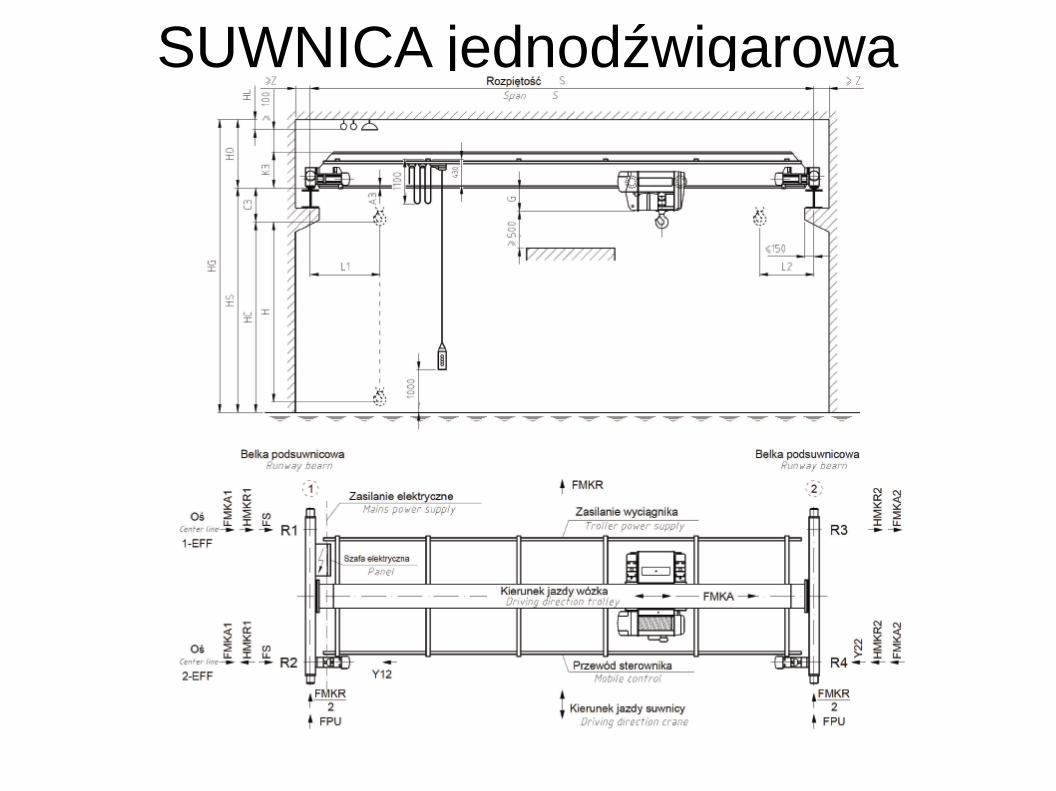
SUWNICA jednodźwigarowa
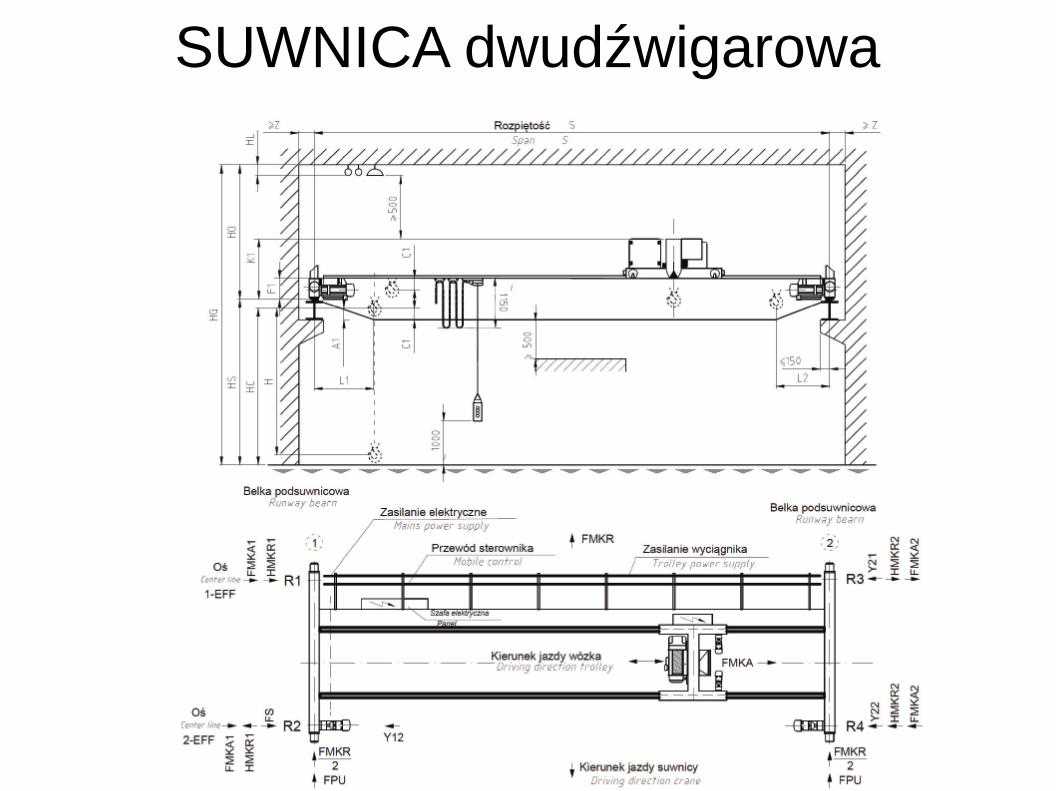
SUWNICA dwudźwigarowa

SUWNICA dwudźwigarowa
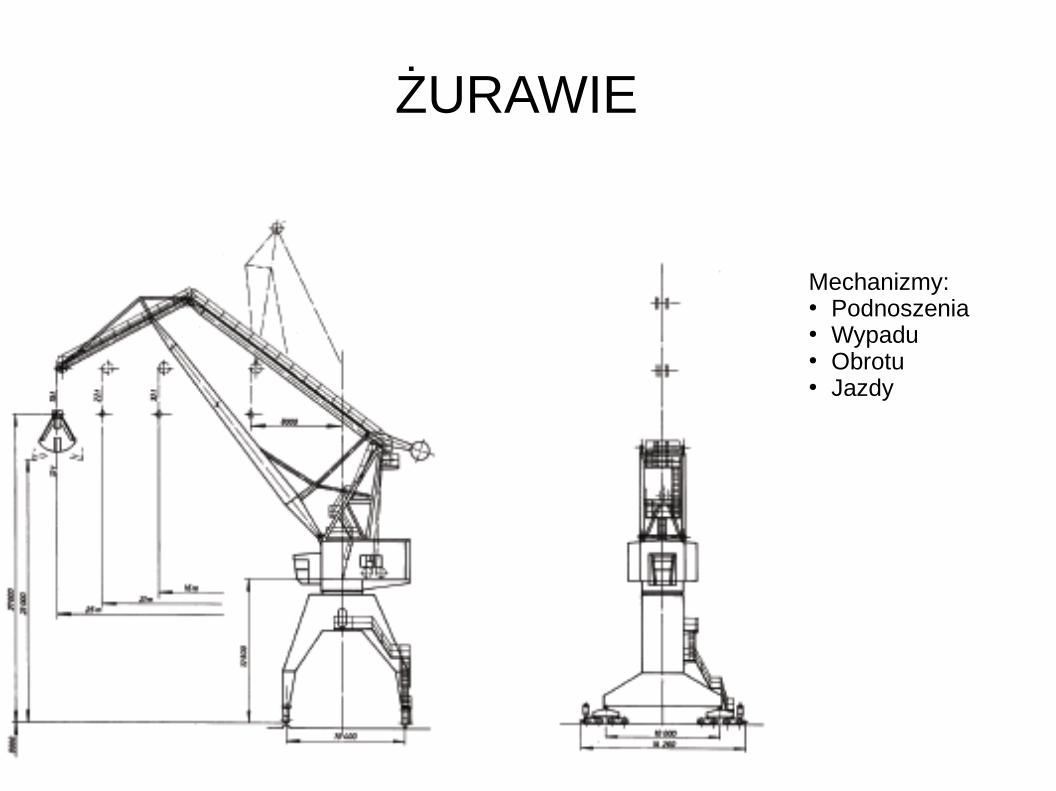
ŻURAWIE
Mechanizmy:● Podnoszenia● Wypadu● Obrotu● Jazdy
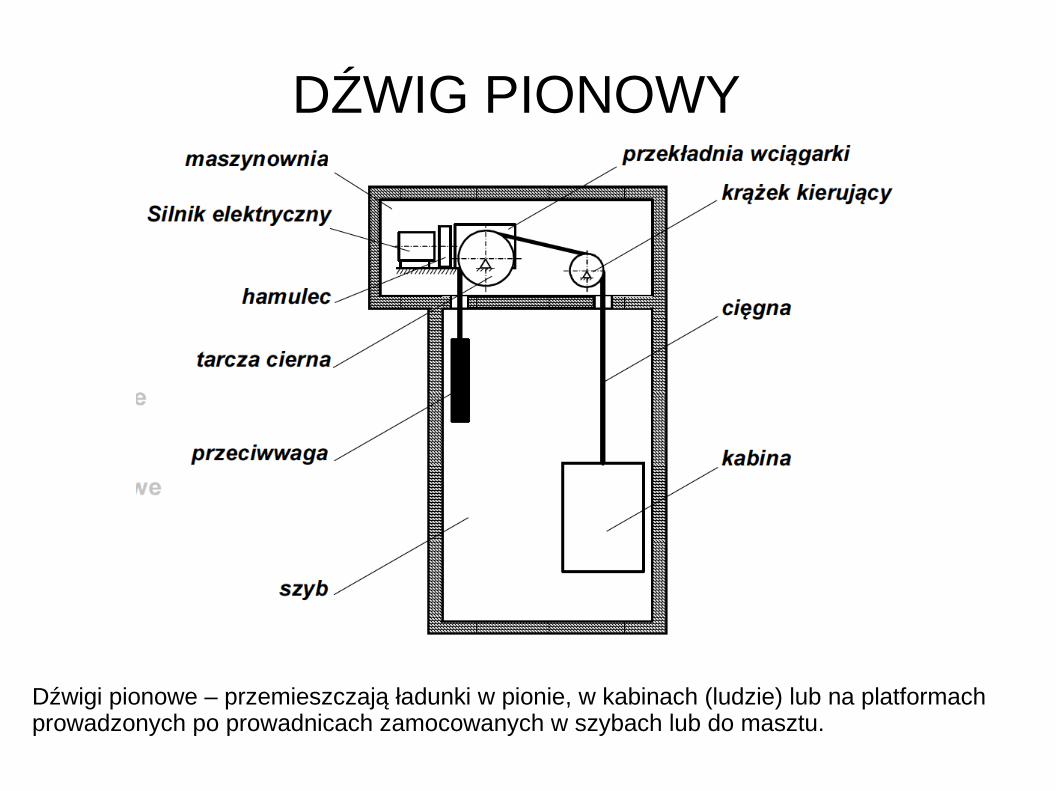
DŹWIG PIONOWY
Dźwigi pionowe – przemieszczają ładunki w pionie, w kabinach (ludzie) lub na platformach prowadzonych po prowadnicach zamocowanych w szybach lub do masztu.
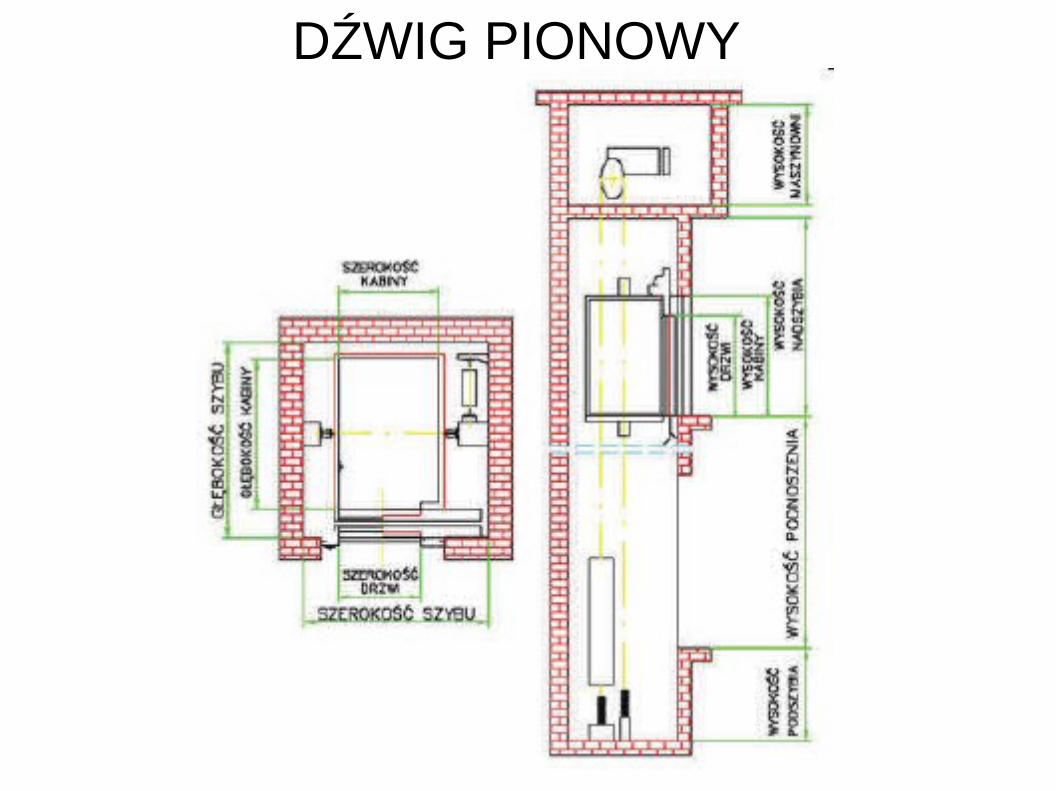
DŹWIG PIONOWY
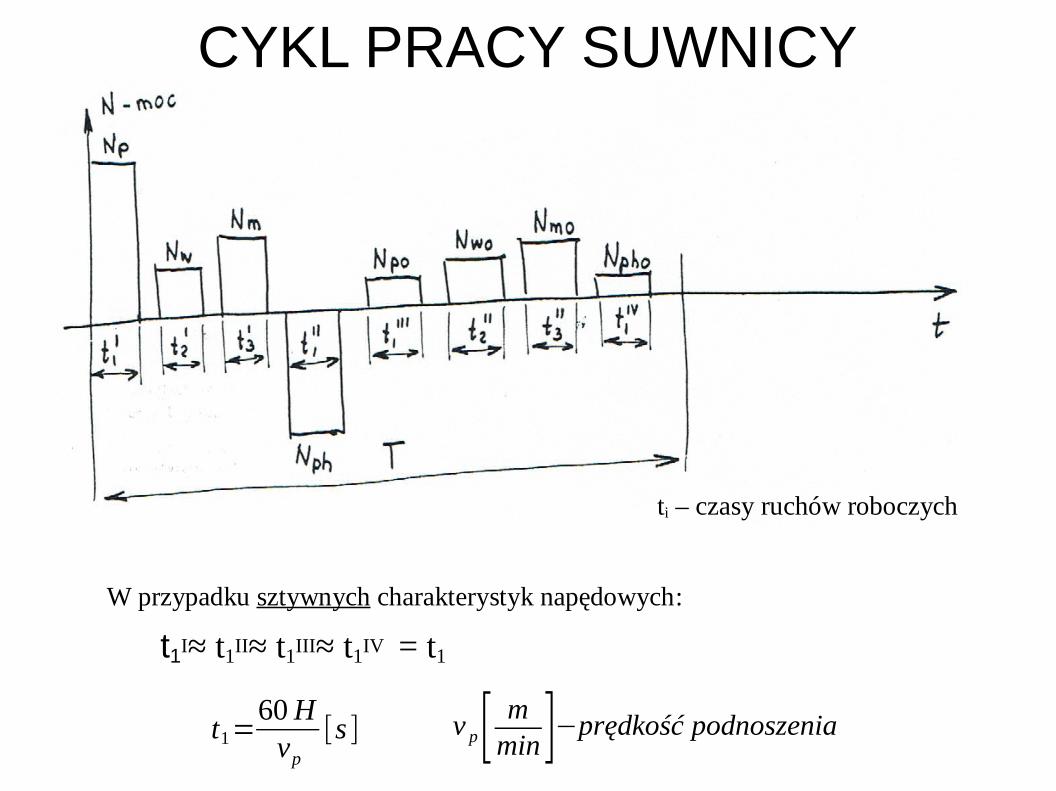
CYKL PRACY SUWNICY
ti – czasy ruchów roboczych
W przypadku sztywnych charakterystyk napędowych:
t1=60 H
vp
[s ] v p[ mmin ]−prędkość podnoszenia
t1I≈ t1II≈ t1III≈ t1IV = t1
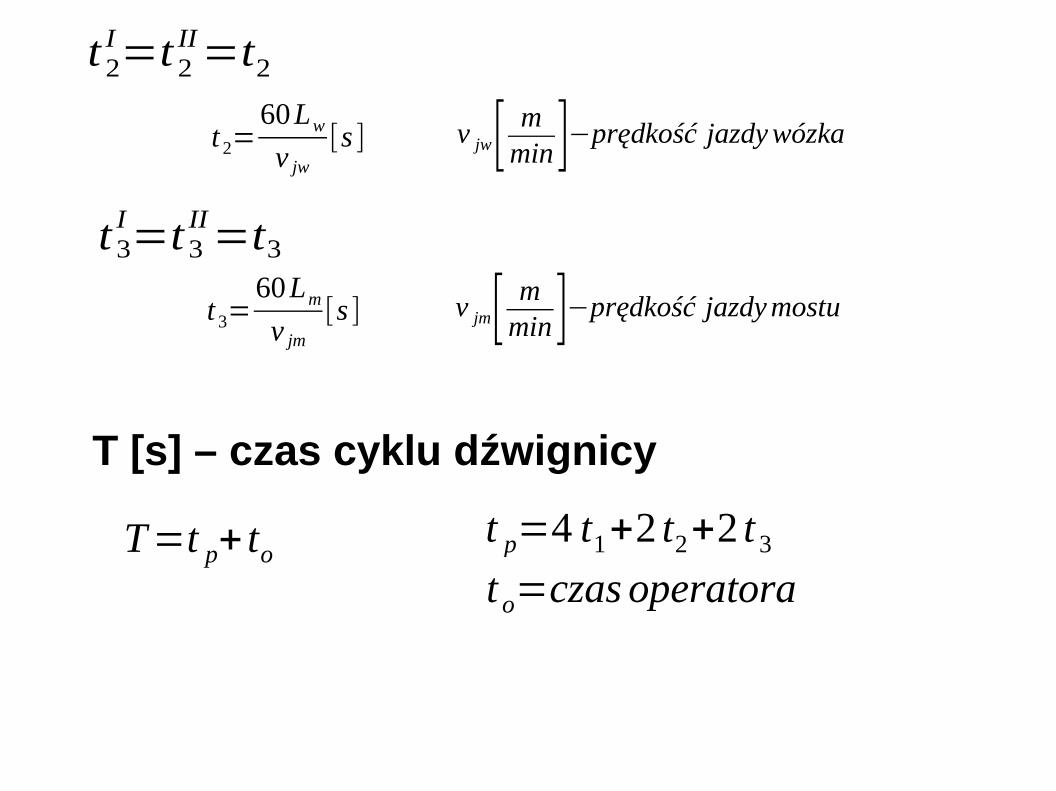
t 2I=t 2
II=t2
v jw[ mmin ]−prędkość jazdywózkat 2=
60Lw
v jw
[s ]
t 3I=t 3
II=t3
t 3=60Lm
v jm
[s ] v jm[ mmin ]−prędkość jazdymostu
T [s] – czas cyklu dźwignicy
T=t p+ tot p=4 t1+2 t2+2 t 3
t o=czas operatora
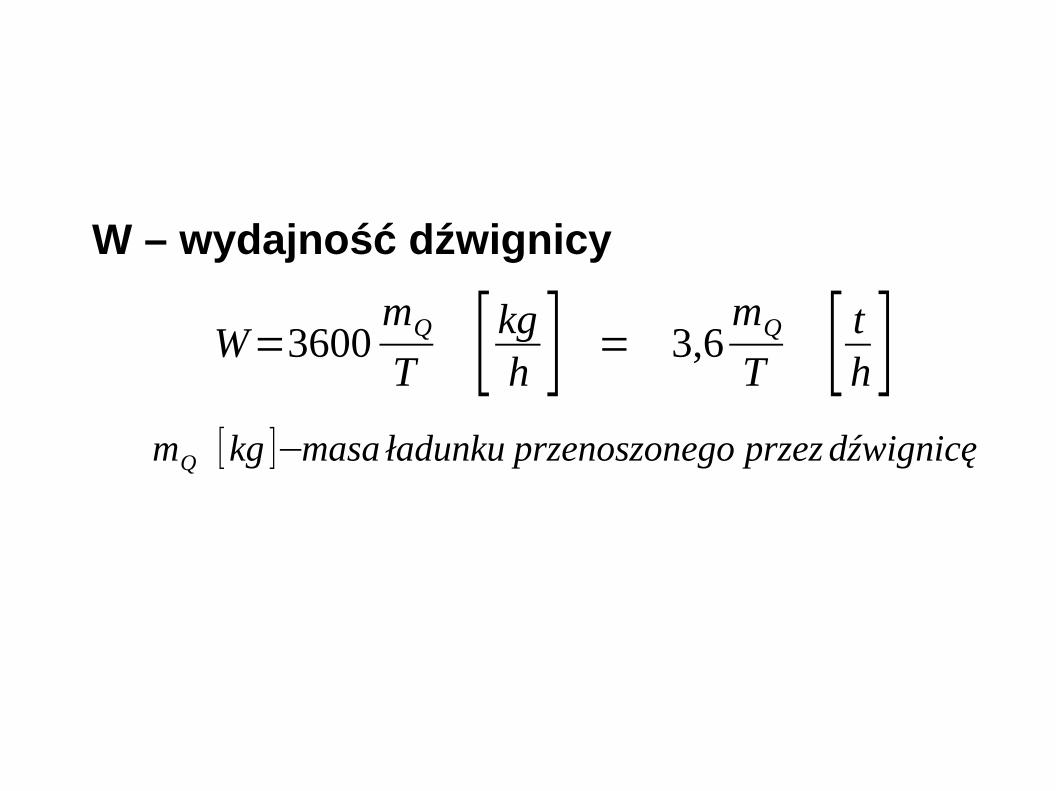
W – wydajność dźwignicy
W=3600mQ
T [ kgh ] = 3,6
mQ
T [ th ]
mQ [kg ]−masa ładunku przenoszonego przez dźwignicę
Cechy transportu dźwignicą
● Wydajność zależy od czasu cyklu T, tzn. od czasów ruchów roboczych i czasów przerw. Istnieje możliwość łączenia różnych ruchów roboczych (wprawny operator).
Czas cyklu zależny jest od długości dróg transportowych.
● Trasa transportu może być dostosowana do potrzeb.
T=∑tr+∑t o
DŹWIGNICE
GRUPY NATĘŻENIA PRACY DŹWIGNIC
Idea
Systemy klasyfikacyjne
ISO 4301-1
• Cała dźwignica (dwie klasy: obciążenie Q1-Q4 intensywność użytkowania U0-U9 co daje GNP A1-A8),
• Mechanizmy (dwie klasy: obciążenie L1-L4 intensywność użytkowania T0-T9 co daje GNP M1-M8),EN 13001-1
• Pięć niezależnych klas: Q0-Q5 dla spektrum obciążenia, U0-U9 dla liczby cykli roboczych, D0-D9 dla przeciętnych przemieszczeń, P0-P3 dla ruchów pomocniczych, S0-S9 dla historii obciążenia.
•Jest to pewna klasyfikacja.
•Jest to system pomagający w określeniu racjonalnych podstaw projektowania ustrojów nośnych i mechanizmów.
•Płaszczyzna porozumienia pomiędzy producentem a użytkownikiem pozwalająca w przejrzysty sposób dobrać urządzenie do żądanych warunków użytkowania.
DŹWIGNICE
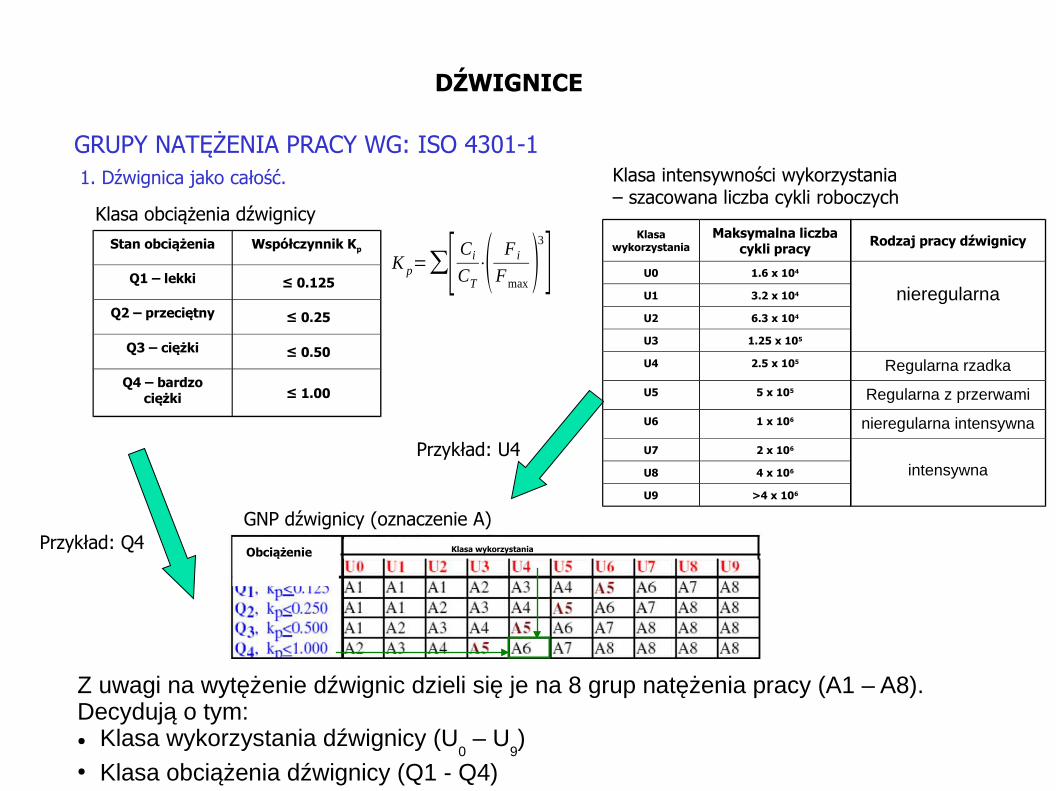
GRUPY NATĘŻENIA PRACY WG: ISO 4301-11. Dźwignica jako całość. Klasa intensywności wykorzystania
– szacowana liczba cykli roboczych
Klasa wykorzystania
Maksymalna liczba cykli pracy Rodzaj pracy dźwignicy
U0 1.6 x 104
nieregularnaU1 3.2 x 104
U2 6.3 x 104
U3 1.25 x 105
U4 2.5 x 105 Regularna rzadka
U5 5 x 105 Regularna z przerwami
U6 1 x 106 nieregularna intensywna
U7 2 x 106
intensywnaU8 4 x 106
U9 >4 x 106
Przykład: Q4
Stan obciążenia Współczynnik Kp
Q1 – lekki ≤ 0.125
Q2 – przeciętny ≤ 0.25
Q3 – ciężki ≤ 0.50
Q4 – bardzo ciężki ≤ 1.00
Przykład: U4
Klasa obciążenia dźwignicy
K p=∑[ Ci
CT
⋅( F i
Fmax)
3]
GNP dźwignicy (oznaczenie A)
Obciążenie Klasa wykorzystania
Z uwagi na wytężenie dźwignic dzieli się je na 8 grup natężenia pracy (A1 – A8). Decydują o tym:● Klasa wykorzystania dźwignicy (U
0 – U
9)
● Klasa obciążenia dźwignicy (Q1 - Q4)
DŹWIGNICE
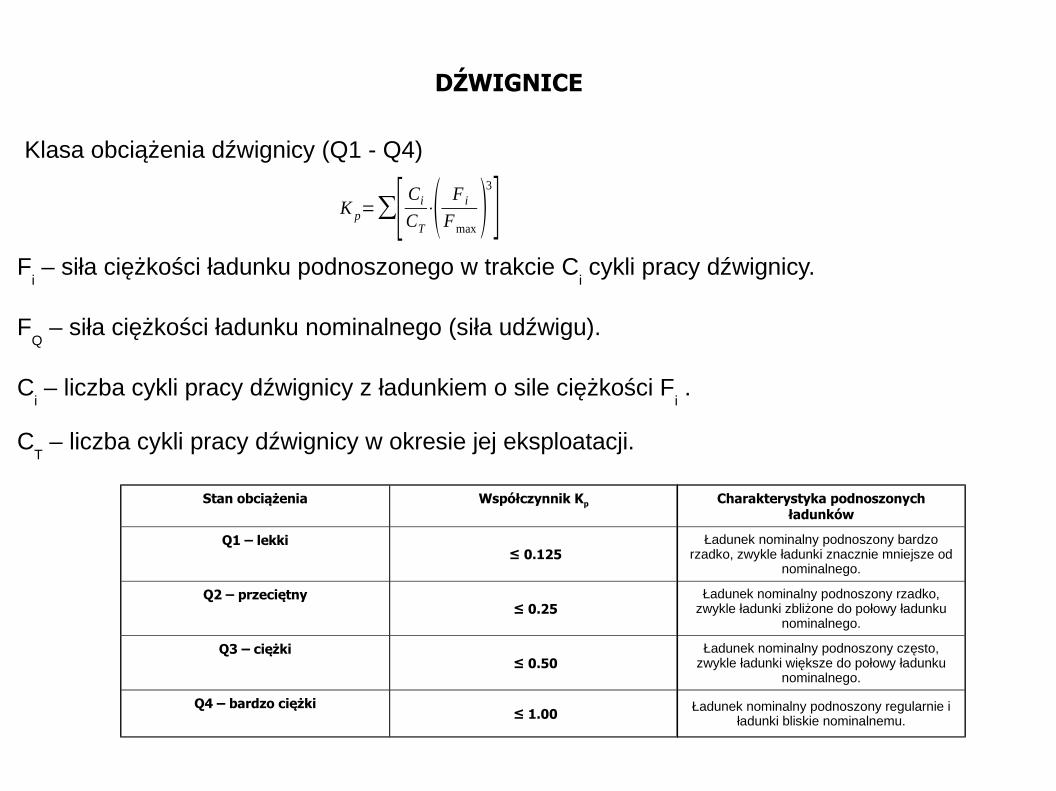
Klasa obciążenia dźwignicy (Q1 - Q4)
K p=∑[ Ci
CT
⋅( F i
Fmax)
3]F
i – siła ciężkości ładunku podnoszonego w trakcie C
i cykli pracy dźwignicy.
FQ – siła ciężkości ładunku nominalnego (siła udźwigu).
Ci – liczba cykli pracy dźwignicy z ładunkiem o sile ciężkości F
i .
CT – liczba cykli pracy dźwignicy w okresie jej eksploatacji.
Stan obciążenia Współczynnik Kp Charakterystyka podnoszonych ładunków
Q1 – lekki ≤ 0.125
Ładunek nominalny podnoszony bardzo rzadko, zwykle ładunki znacznie mniejsze od
nominalnego.
Q2 – przeciętny ≤ 0.25
Ładunek nominalny podnoszony rzadko, zwykle ładunki zbliżone do połowy ładunku
nominalnego.
Q3 – ciężki ≤ 0.50
Ładunek nominalny podnoszony często, zwykle ładunki większe do połowy ładunku
nominalnego.
Q4 – bardzo ciężki ≤ 1.00 Ładunek nominalny podnoszony regularnie i
ładunki bliskie nominalnemu.
DŹWIGNICE
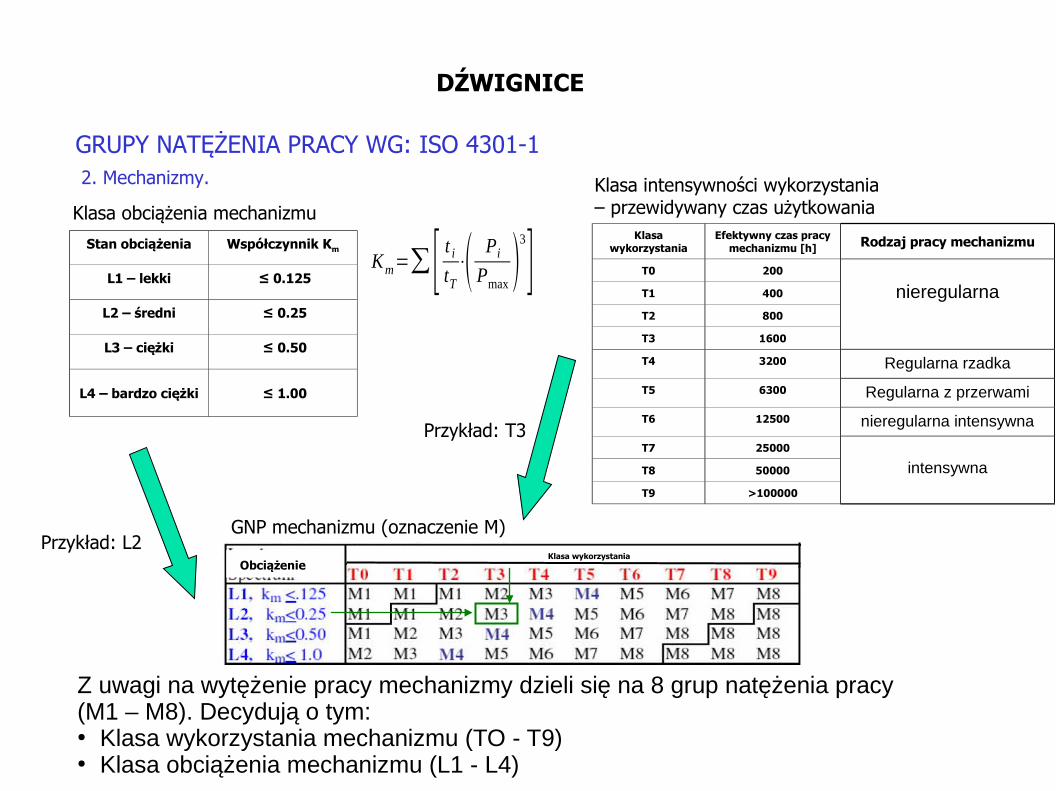
GRUPY NATĘŻENIA PRACY WG: ISO 4301-12. Mechanizmy. Klasa intensywności wykorzystania
– przewidywany czas użytkowaniaKlasa
wykorzystaniaEfektywny czas pracy
mechanizmu [h] Rodzaj pracy mechanizmu
T0 200
nieregularnaT1 400
T2 800
T3 1600
T4 3200 Regularna rzadka
T5 6300 Regularna z przerwami
T6 12500 nieregularna intensywna
T7 25000
intensywnaT8 50000
T9 >100000
Przykład: L2
Stan obciążenia Współczynnik Km
L1 – lekki ≤ 0.125
L2 – średni ≤ 0.25
L3 – ciężki ≤ 0.50
L4 – bardzo ciężki ≤ 1.00
Klasa obciążenia mechanizmu
Przykład: T3
Km=∑[ t i
tT
⋅( Pi
Pmax)
3]
GNP mechanizmu (oznaczenie M)
Obciążenie Klasa wykorzystania
Z uwagi na wytężenie pracy mechanizmy dzieli się na 8 grup natężenia pracy (M1 – M8). Decydują o tym:● Klasa wykorzystania mechanizmu (TO - T9)● Klasa obciążenia mechanizmu (L1 - L4)
DŹWIGNICE
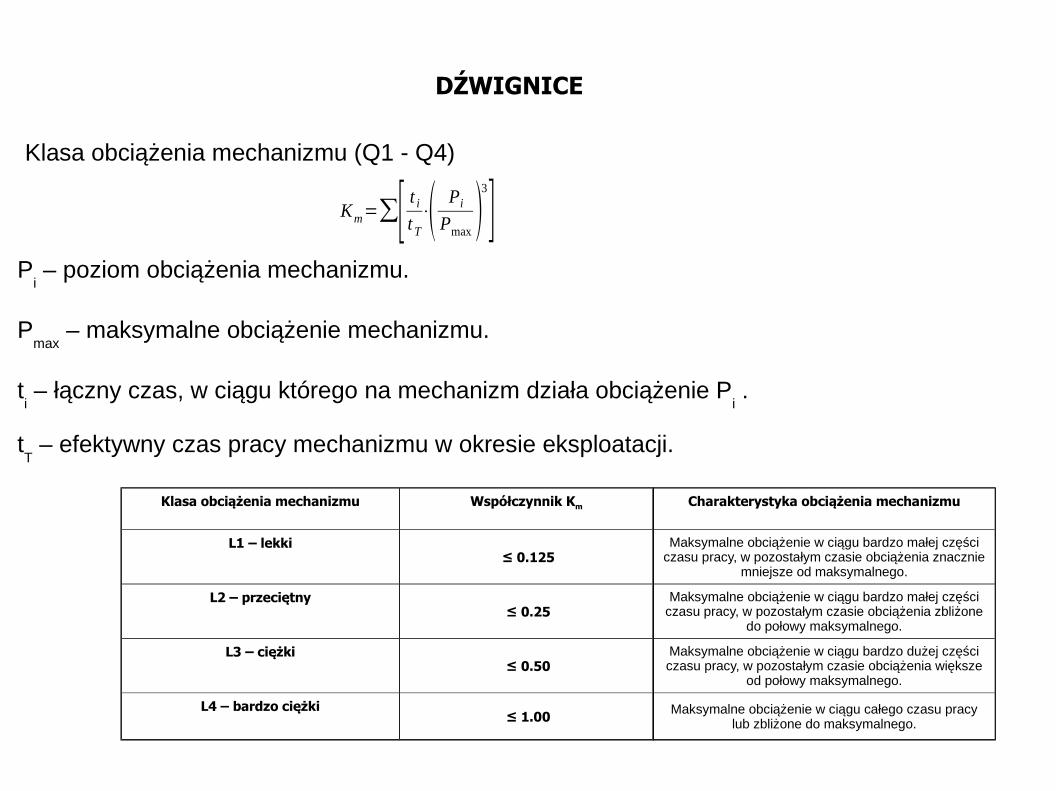
Klasa obciążenia mechanizmu (Q1 - Q4)
Km=∑[ t i
tT
⋅( Pi
Pmax)
3]P
i – poziom obciążenia mechanizmu.
Pmax
– maksymalne obciążenie mechanizmu.
ti – łączny czas, w ciągu którego na mechanizm działa obciążenie P
i .
tT – efektywny czas pracy mechanizmu w okresie eksploatacji.
Klasa obciążenia mechanizmu Współczynnik Km Charakterystyka obciążenia mechanizmu
L1 – lekki ≤ 0.125
Maksymalne obciążenie w ciągu bardzo małej części czasu pracy, w pozostałym czasie obciążenia znacznie
mniejsze od maksymalnego.
L2 – przeciętny ≤ 0.25
Maksymalne obciążenie w ciągu bardzo małej części czasu pracy, w pozostałym czasie obciążenia zbliżone
do połowy maksymalnego.
L3 – ciężki ≤ 0.50
Maksymalne obciążenie w ciągu bardzo dużej części czasu pracy, w pozostałym czasie obciążenia większe
od połowy maksymalnego.
L4 – bardzo ciężki ≤ 1.00 Maksymalne obciążenie w ciągu całego czasu pracy
lub zbliżone do maksymalnego.
Ob
cią
żen
ie
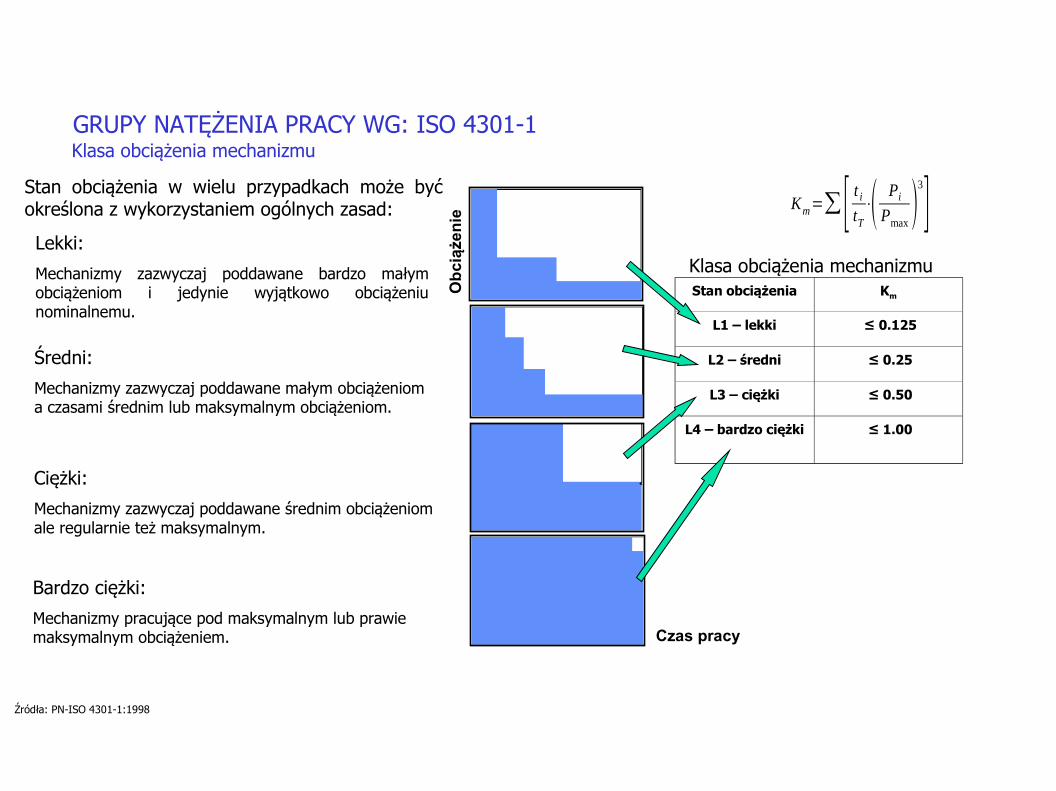
GRUPY NATĘŻENIA PRACY WG: ISO 4301-1Klasa obciążenia mechanizmu
Stan obciążenia w wielu przypadkach może być określona z wykorzystaniem ogólnych zasad:
Źródła: PN-ISO 4301-1:1998
Lekki:
Mechanizmy zazwyczaj poddawane bardzo małym obciążeniom i jedynie wyjątkowo obciążeniu nominalnemu.
Stan obciążenia Km
L1 – lekki ≤ 0.125
L2 – średni ≤ 0.25
L3 – ciężki ≤ 0.50
L4 – bardzo ciężki ≤ 1.00
Klasa obciążenia mechanizmu
Km=∑[ t i
tT
⋅( Pi
Pmax)
3]
Czas pracy
Średni:
Mechanizmy zazwyczaj poddawane małym obciążeniom a czasami średnim lub maksymalnym obciążeniom.
Ciężki:
Mechanizmy zazwyczaj poddawane średnim obciążeniom ale regularnie też maksymalnym.
Bardzo ciężki:
Mechanizmy pracujące pod maksymalnym lub prawie maksymalnym obciążeniem.
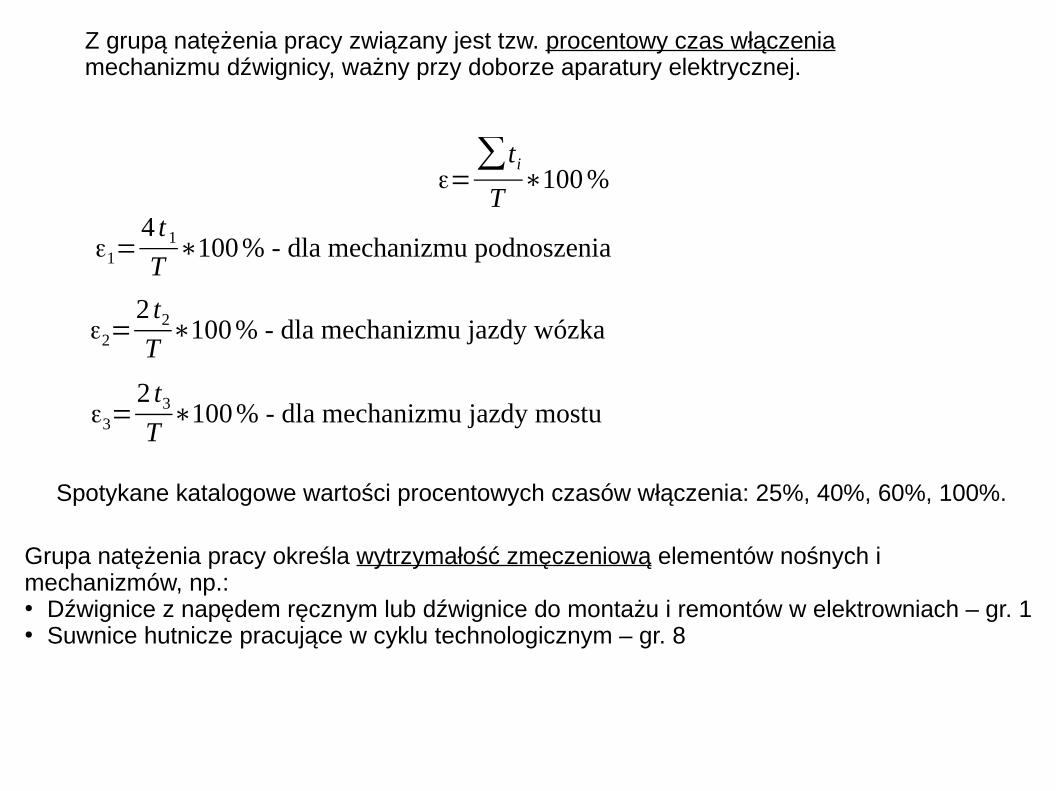
Z grupą natężenia pracy związany jest tzw. procentowy czas włączenia mechanizmu dźwignicy, ważny przy doborze aparatury elektrycznej.
ε=∑ti
T∗100 %
ε1=4 t 1
T∗100% - dla mechanizmu podnoszenia
ε2=2 t2
T∗100% - dla mechanizmu jazdy wózka
ε3=2 t3
T∗100% - dla mechanizmu jazdy mostu
Spotykane katalogowe wartości procentowych czasów włączenia: 25%, 40%, 60%, 100%.
Grupa natężenia pracy określa wytrzymałość zmęczeniową elementów nośnych i mechanizmów, np.:● Dźwignice z napędem ręcznym lub dźwignice do montażu i remontów w elektrowniach – gr. 1● Suwnice hutnicze pracujące w cyklu technologicznym – gr. 8
DŹWIGNICE
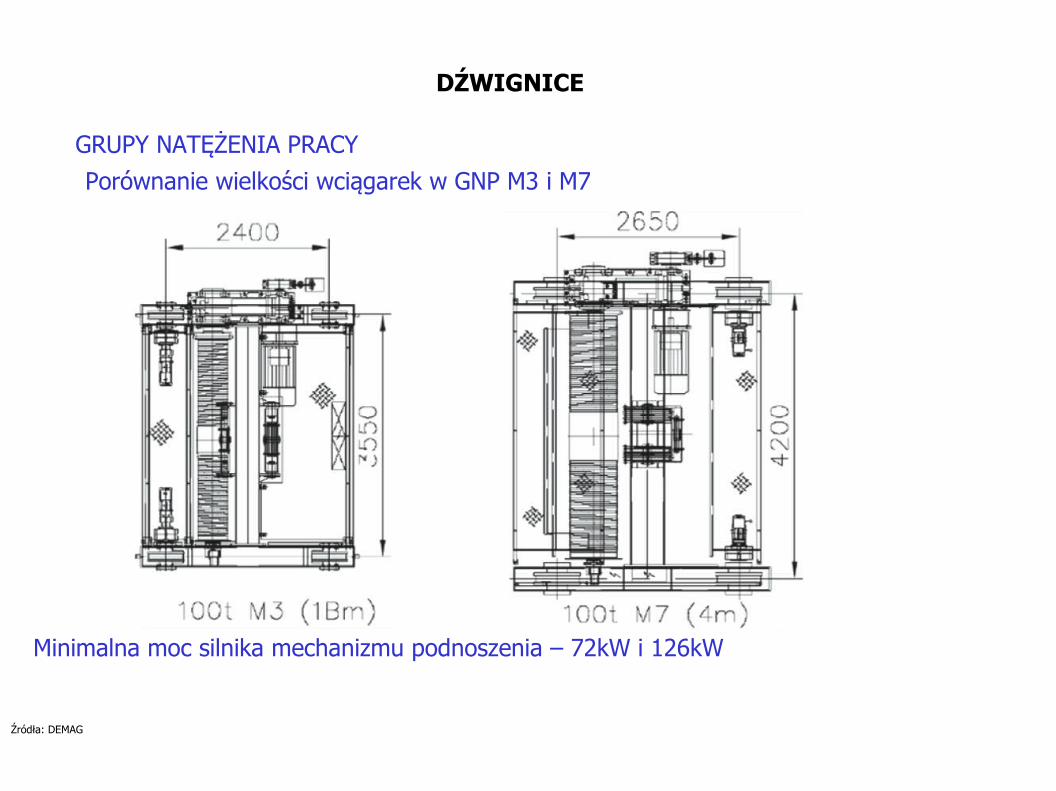
GRUPY NATĘŻENIA PRACY
Porównanie wielkości wciągarek w GNP M3 i M7
Minimalna moc silnika mechanizmu podnoszenia – 72kW i 126kW
Źródła: DEMAG
GRUPY NATĘŻENIA PRACY
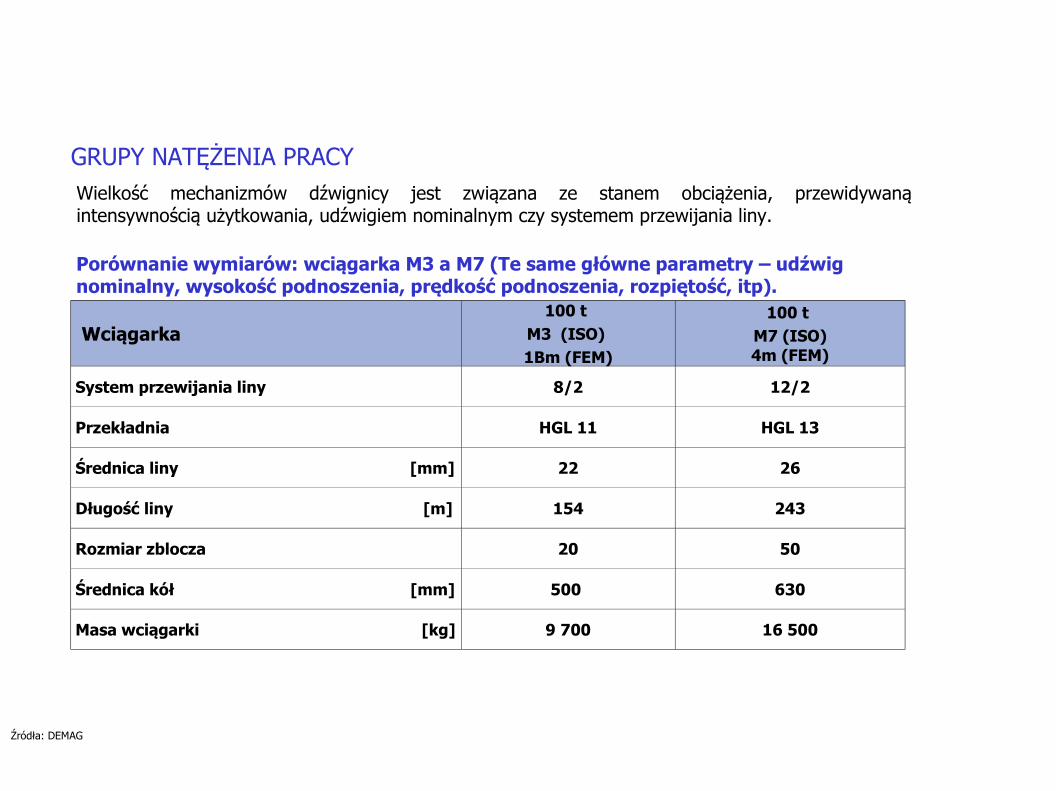
Porównanie wymiarów: wciągarka M3 a M7 (Te same główne parametry – udźwig nominalny, wysokość podnoszenia, prędkość podnoszenia, rozpiętość, itp).
Źródła: DEMAG
Wielkość mechanizmów dźwignicy jest związana ze stanem obciążenia, przewidywaną intensywnością użytkowania, udźwigiem nominalnym czy systemem przewijania liny.
Wciągarka 100 t
M3 (ISO) 1Bm (FEM)
100 t M7 (ISO)4m (FEM)
System przewijania liny 8/2 12/2
Przekładnia HGL 11 HGL 13
Średnica liny [mm] 22 26
Długość liny [m] 154 243
Rozmiar zblocza 20 50
Średnica kół [mm] 500 630
Masa wciągarki [kg] 9 700 16 500
DŹWIGNICE
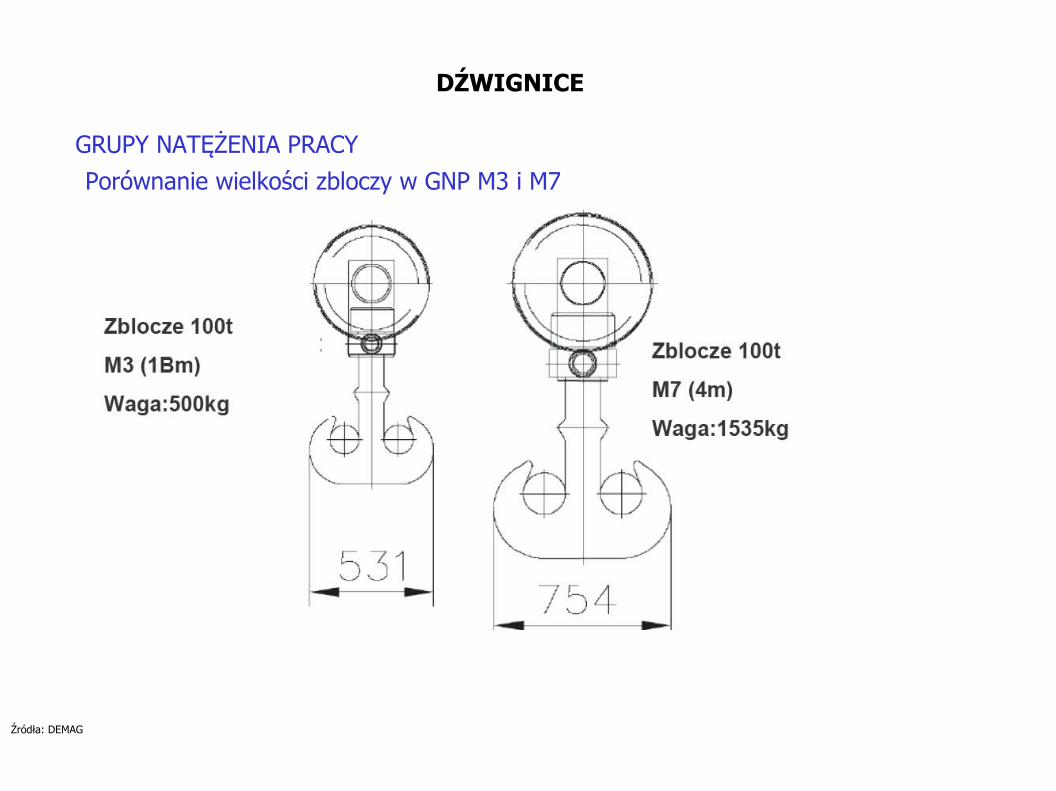
GRUPY NATĘŻENIA PRACY
Porównanie wielkości zbloczy w GNP M3 i M7
Źródła: DEMAG
DŹWIGNICE
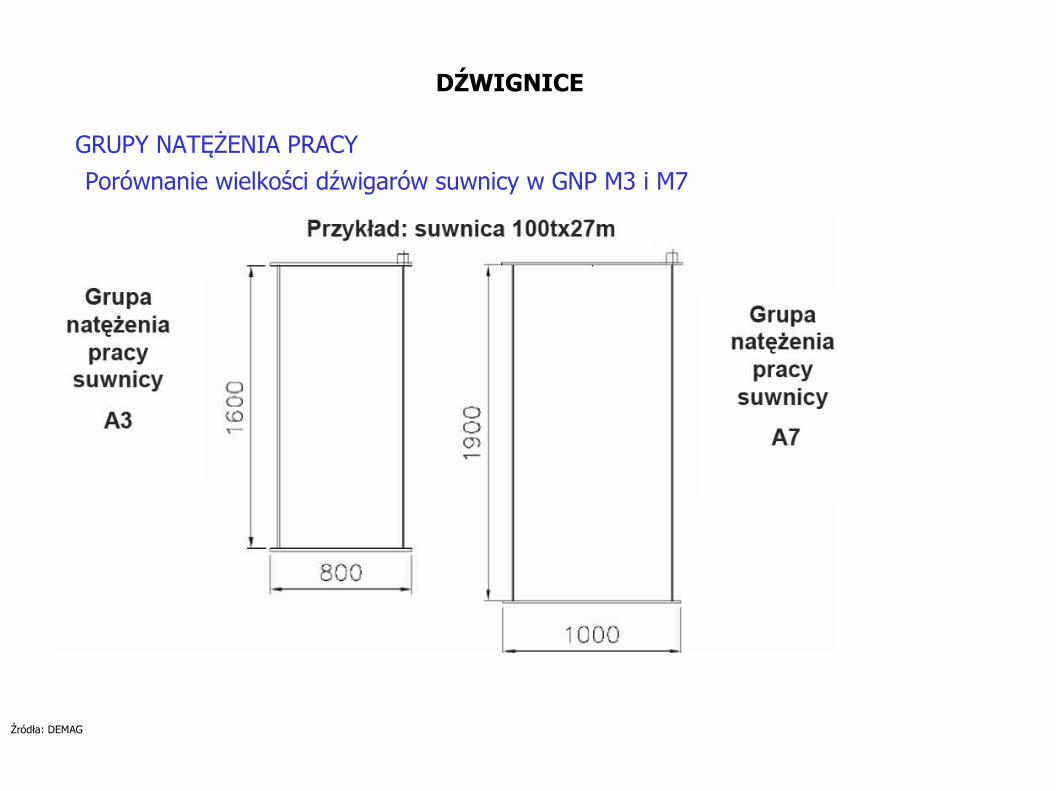
GRUPY NATĘŻENIA PRACY
Porównanie wielkości dźwigarów suwnicy w GNP M3 i M7
Źródła: DEMAG
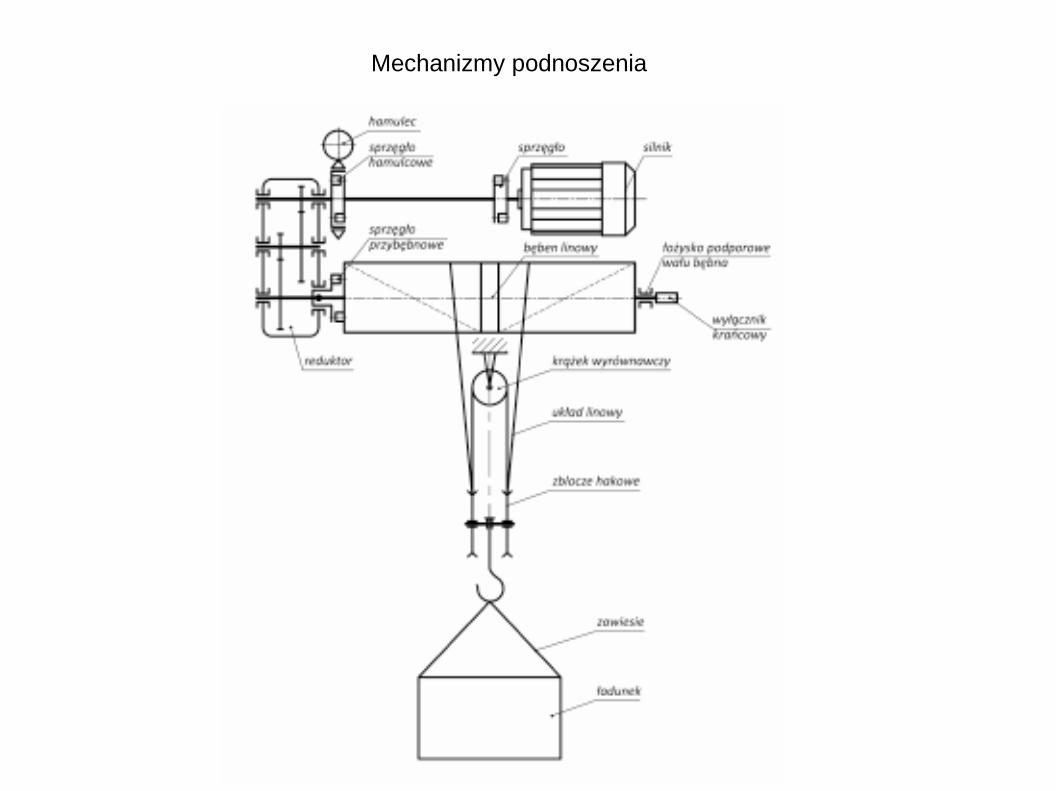
Mechanizmy podnoszenia
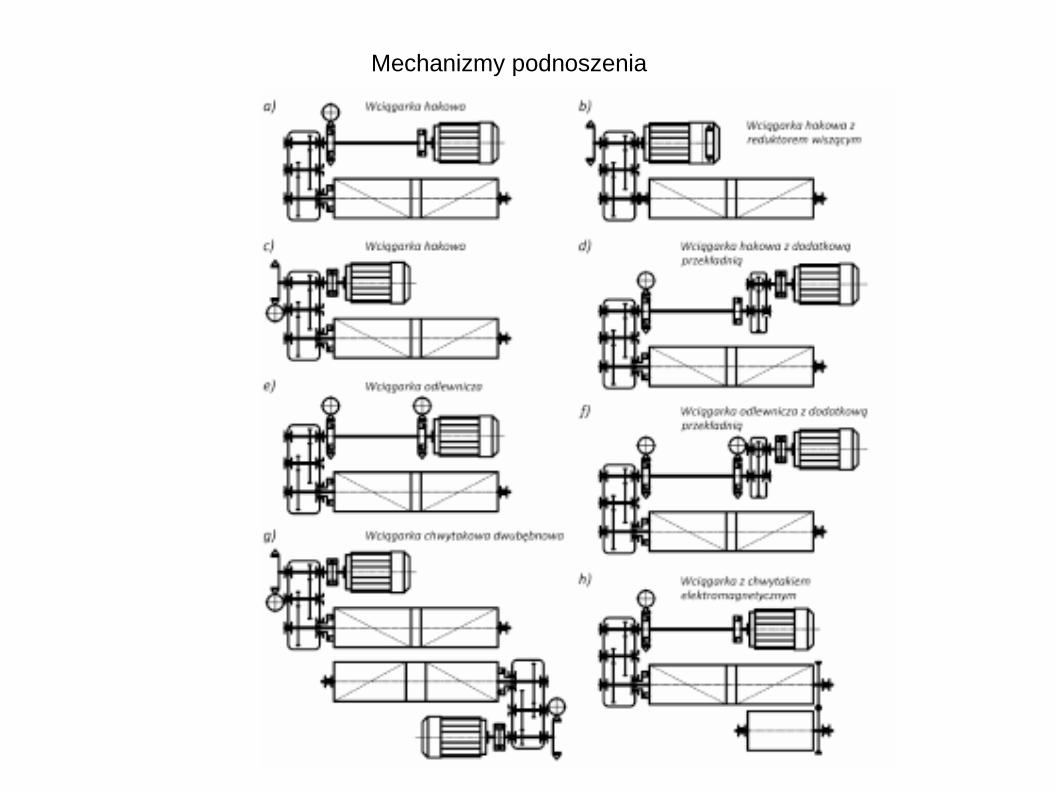
Mechanizmy podnoszenia
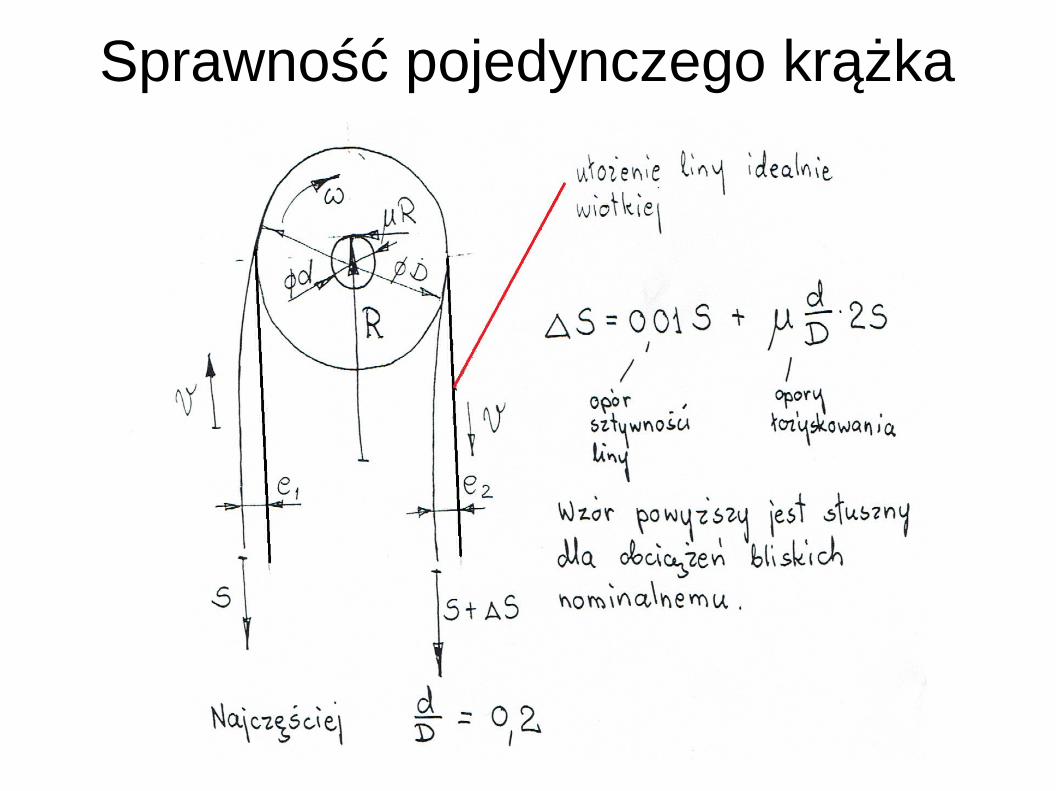
Sprawność pojedynczego krążka
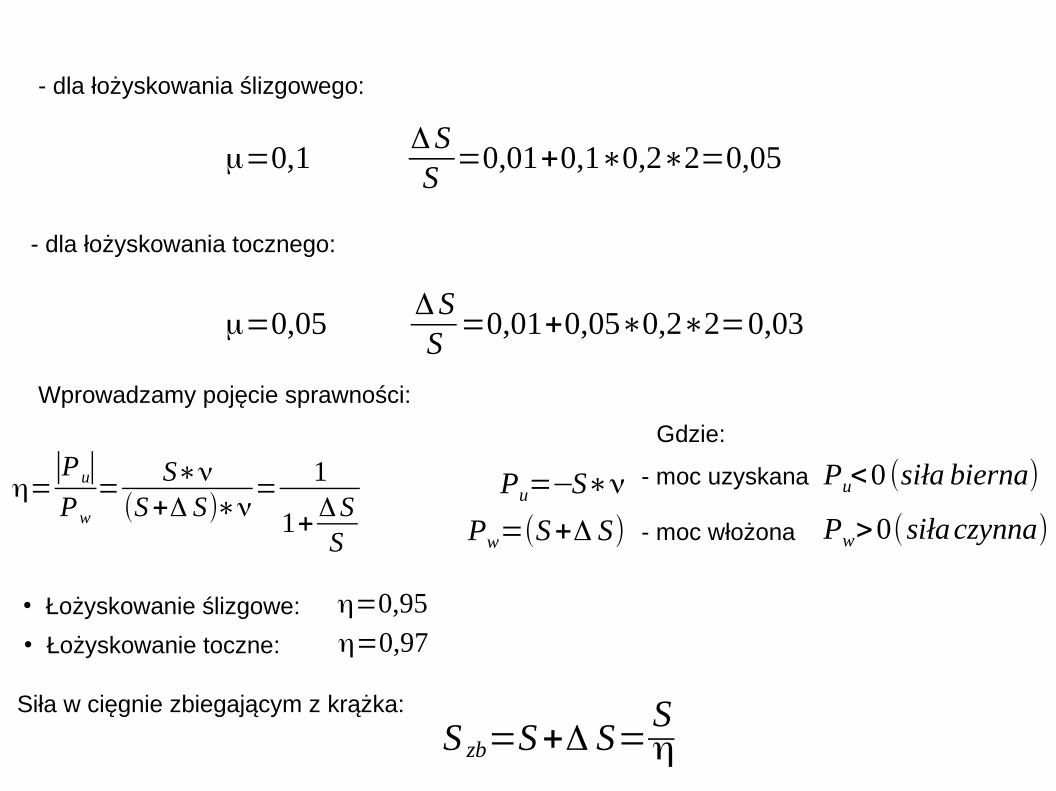
- dla łożyskowania ślizgowego:
μ=0,1ΔSS
=0,01+0,1∗0,2∗2=0,05
- dla łożyskowania tocznego:
μ=0,05ΔSS
=0,01+0,05∗0,2∗2=0,03
Wprowadzamy pojęcie sprawności:
η=|Pu|Pw
= S∗ν(S+Δ S)∗ν
= 1
1+ΔSS
Gdzie:
Pu=−S∗ν - moc uzyskana Pu<0 (siła bierna)
Pw=(S+Δ S) - moc włożona Pw>0(siłaczynna)
● Łożyskowanie ślizgowe: η=0,95● Łożyskowanie toczne: η=0,97
Siła w cięgnie zbiegającym z krążka:
S zb=S+Δ S=Sη
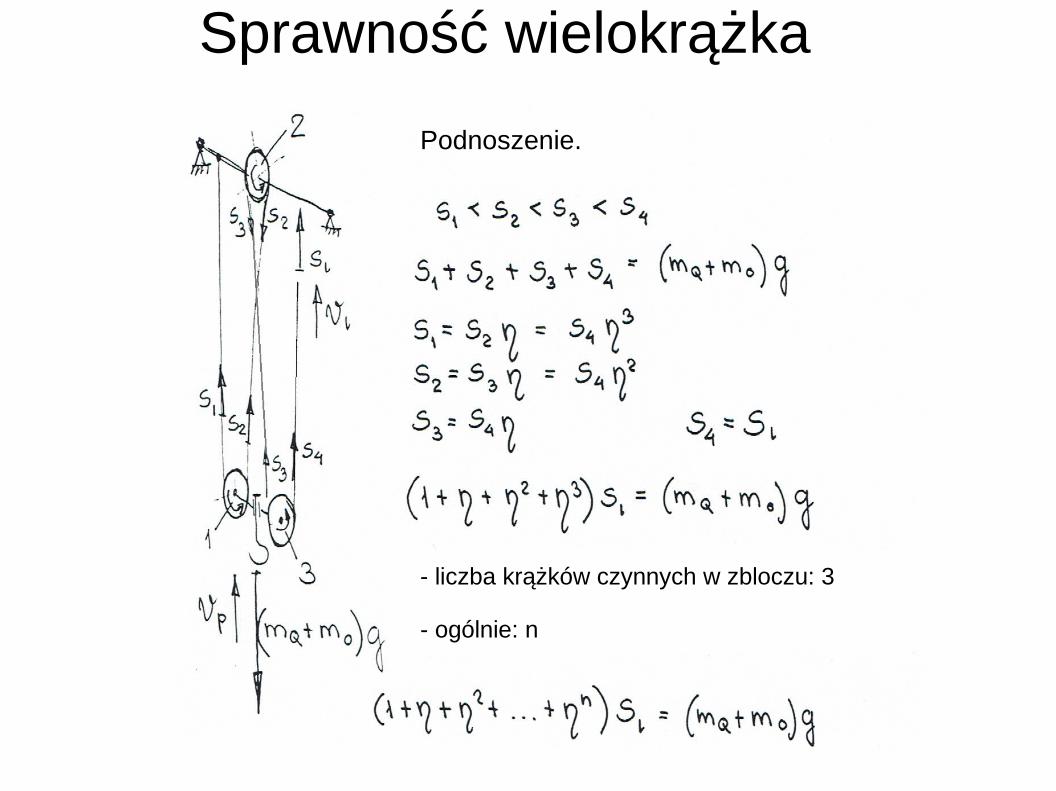
Sprawność wielokrążka
- liczba krążków czynnych w zbloczu: 3
- ogólnie: n
Podnoszenie.
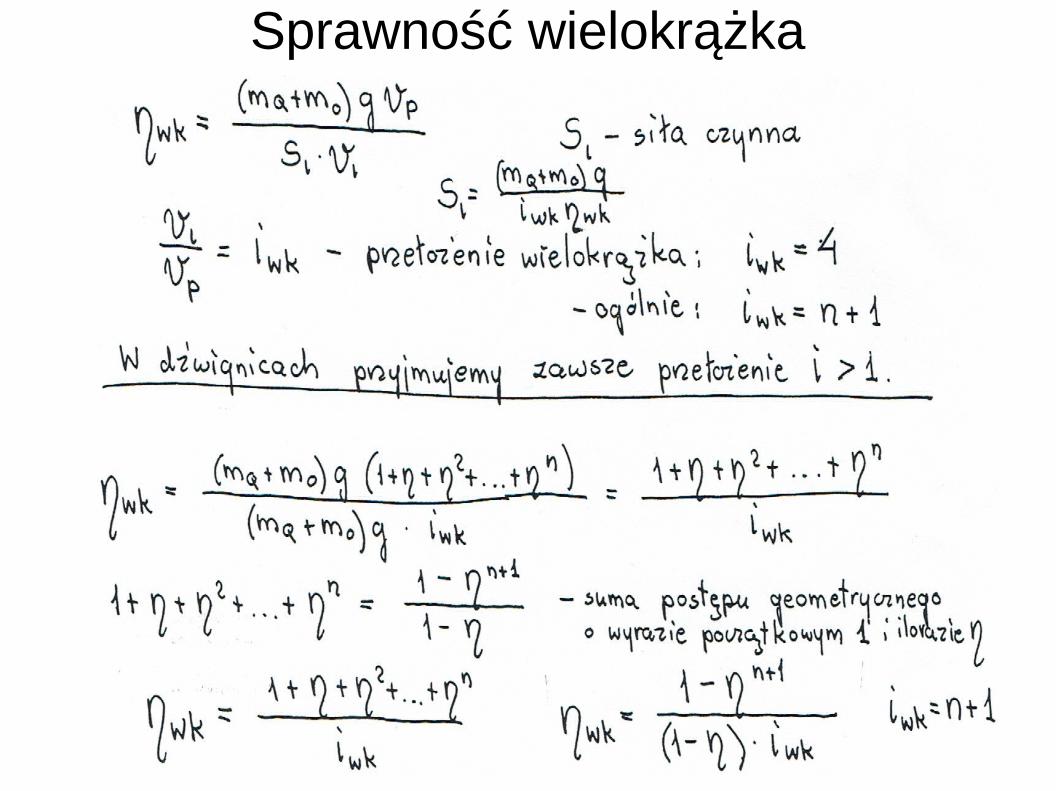
Sprawność wielokrążka
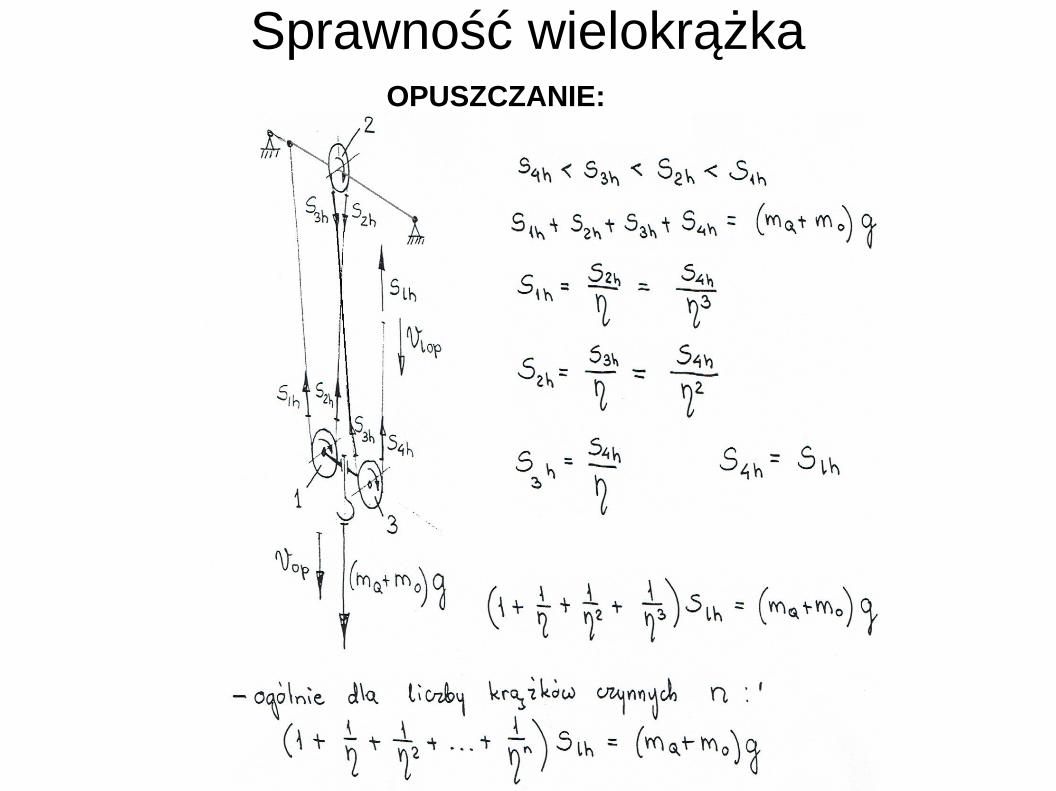
Sprawność wielokrążkaOPUSZCZANIE:
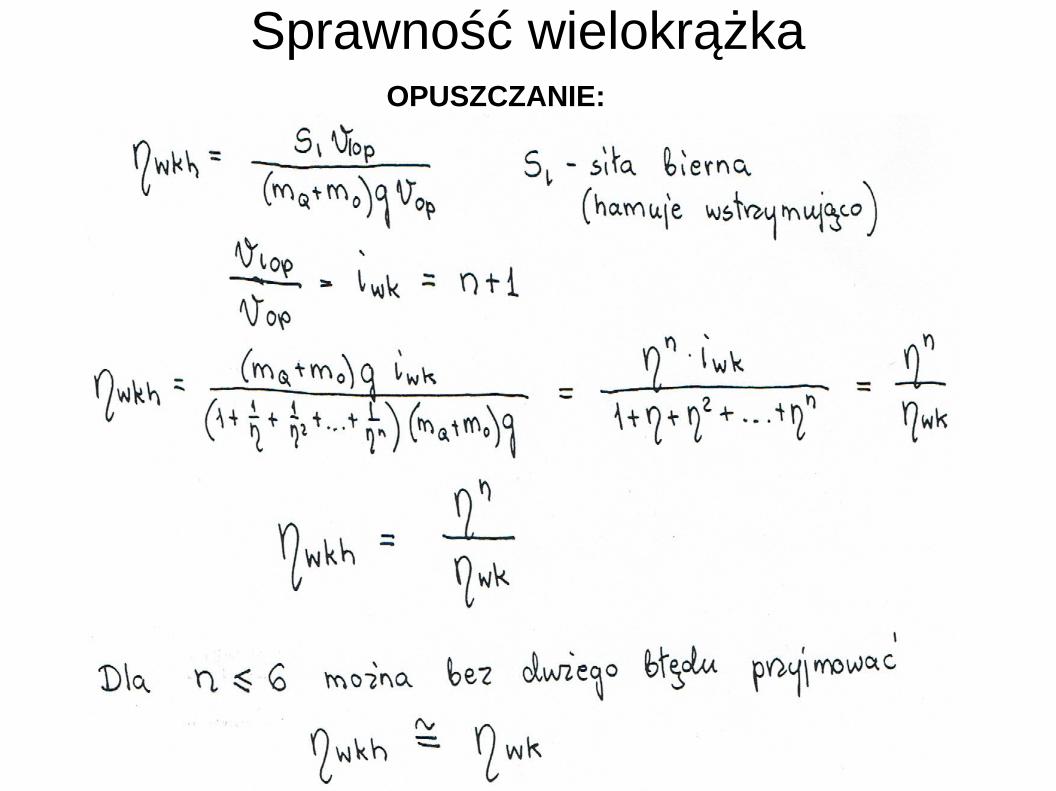
Sprawność wielokrążkaOPUSZCZANIE:
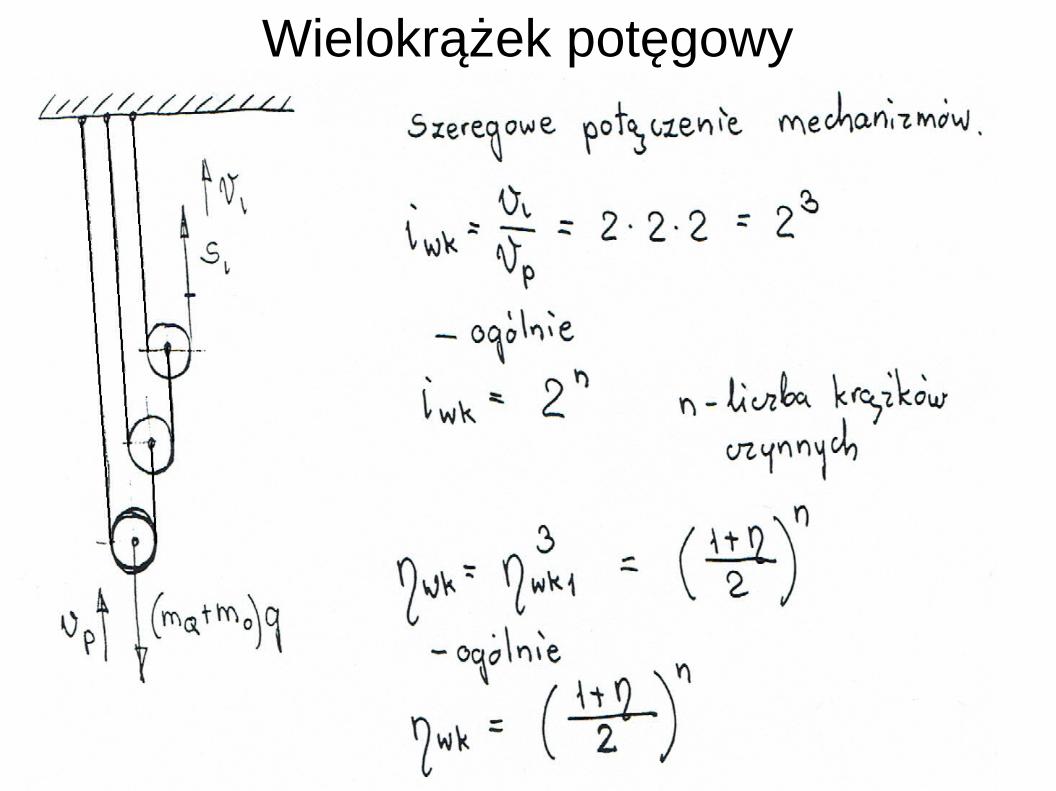
Wielokrążek potęgowy
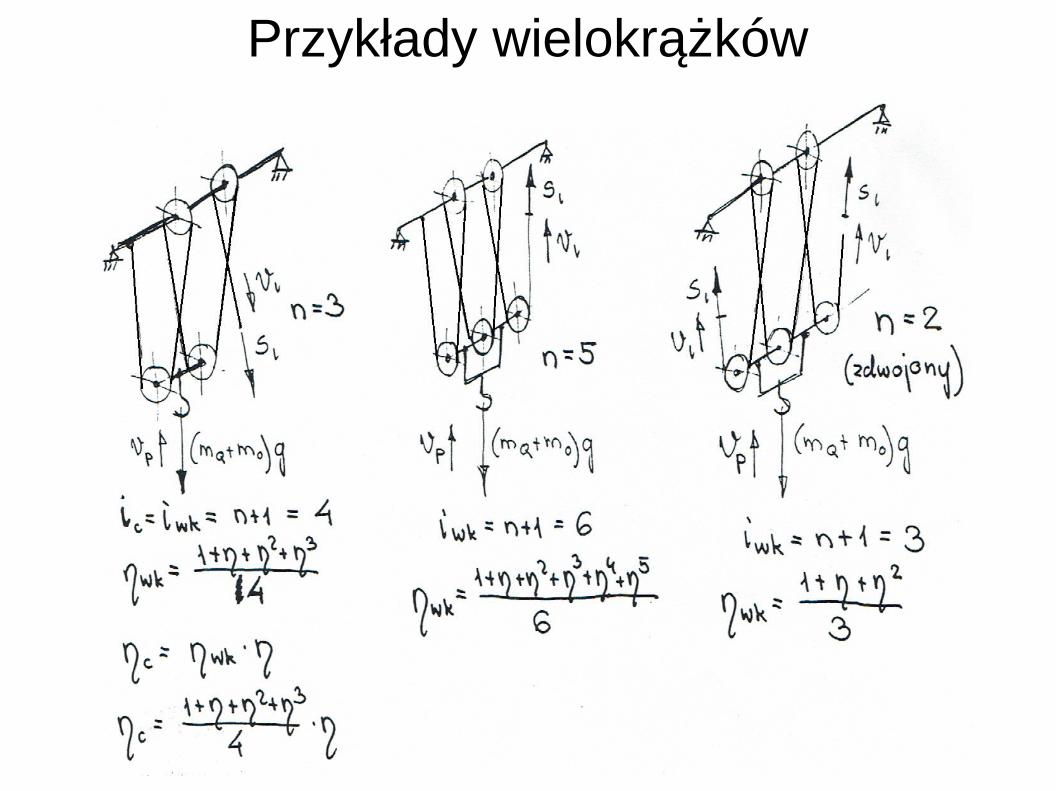
Przykłady wielokrążków
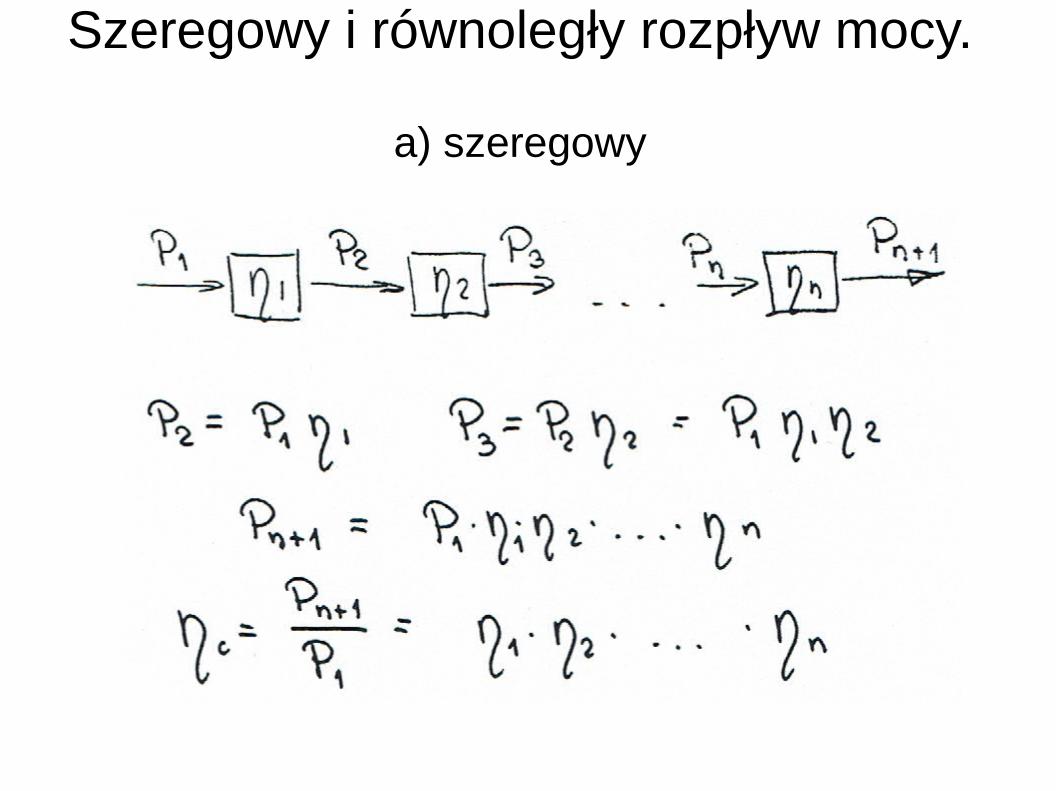
Szeregowy i równoległy rozpływ mocy.
a) szeregowy
Szeregowy i równoległy rozpływ mocy.
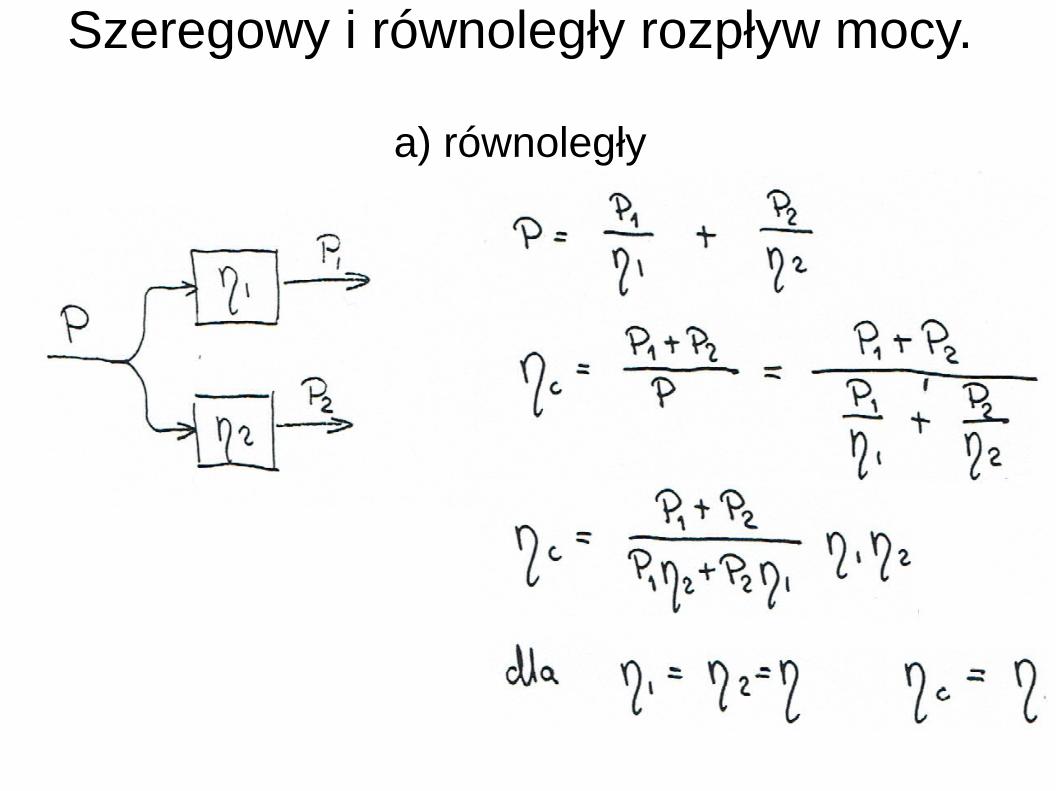
a) równoległy
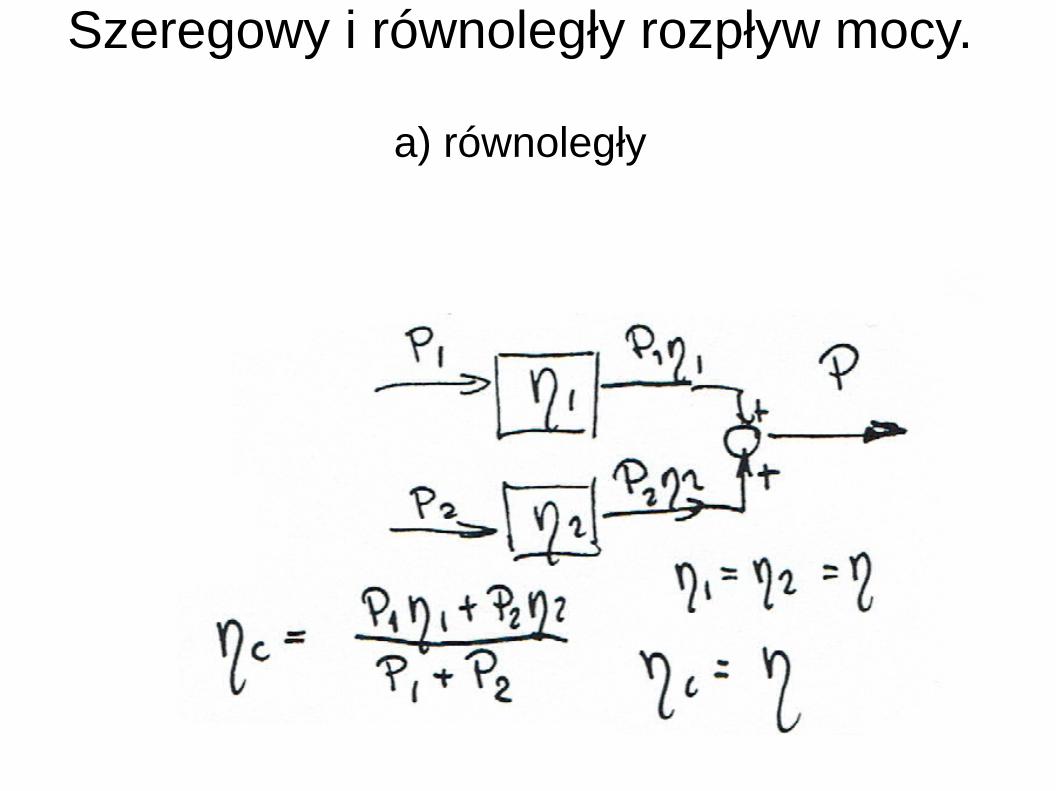
Szeregowy i równoległy rozpływ mocy.
a) równoległy
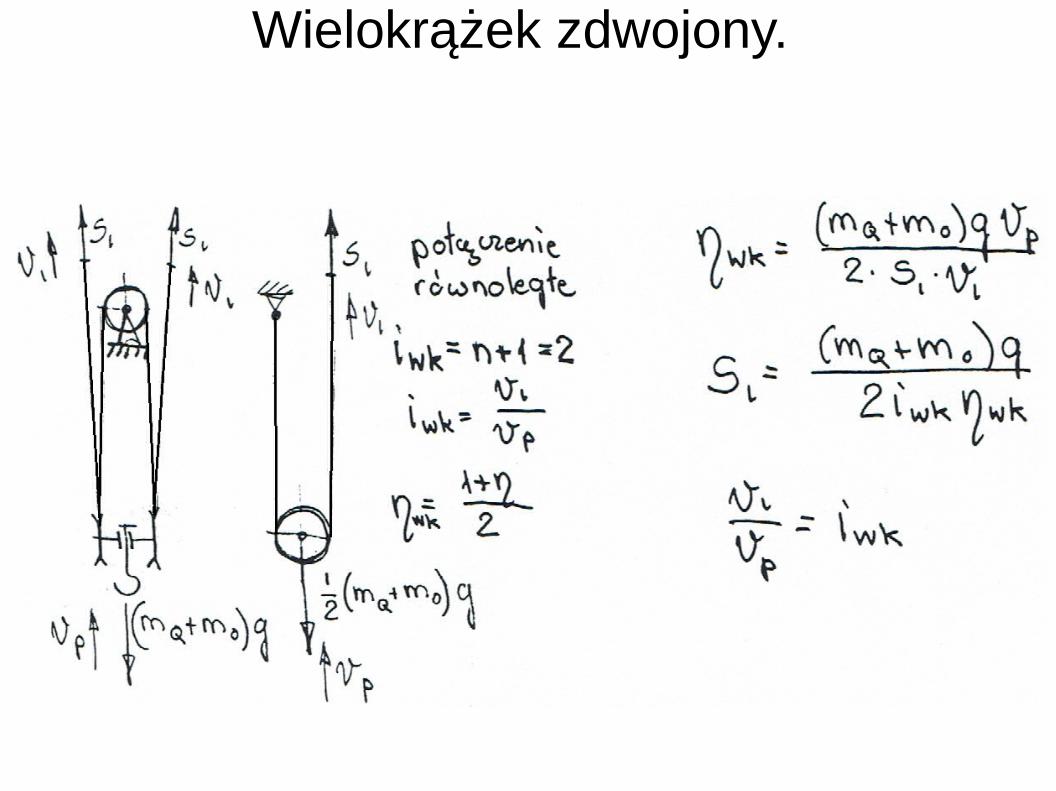
Wielokrążek zdwojony.
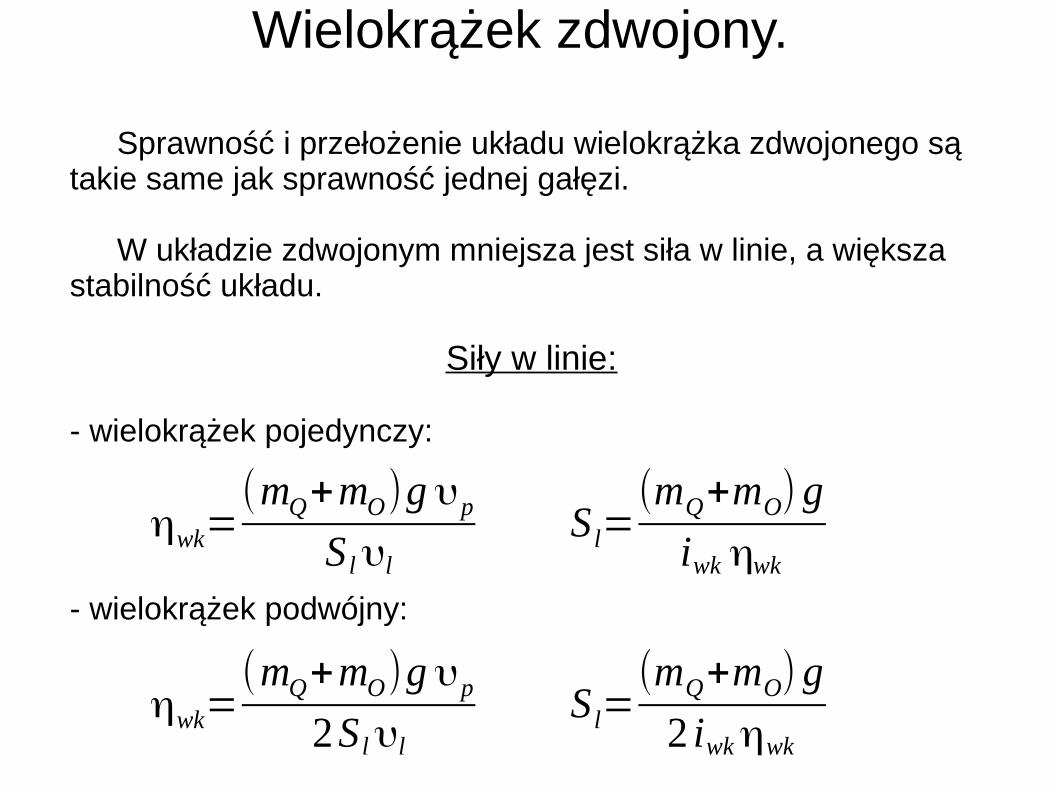
Wielokrążek zdwojony.
Sprawność i przełożenie układu wielokrążka zdwojonego są takie same jak sprawność jednej gałęzi.
W układzie zdwojonym mniejsza jest siła w linie, a większa stabilność układu.
Siły w linie:
- wielokrążek pojedynczy:
- wielokrążek podwójny:
ηwk=(mQ+mO)g υp
S l υl
S l=(mQ+mO) g
iwk ηwk
ηwk=(mQ+mO)g υp
2S l υl
S l=(mQ+mO) g
2 iwk ηwk
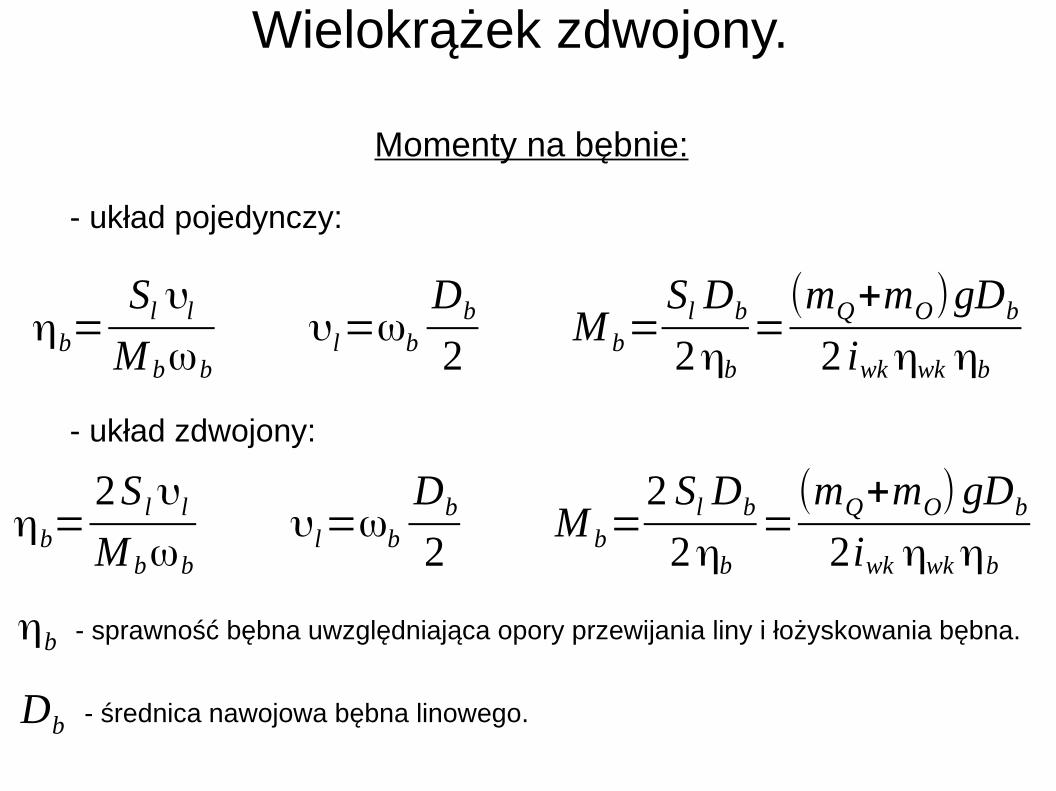
Wielokrążek zdwojony.
Momenty na bębnie:
- układ pojedynczy:
- układ zdwojony:
ηb=Sl υl
M bωb
υl=ωb
Db
2M b=
Sl Db
2ηb
=(mQ+mO)gDb
2 iwk ηwk ηb
ηb=2S l υl
M bωb
υl=ωb
Db
2M b=
2 Sl Db
2ηb
=(mQ+mO) gDb
2iwk ηwk ηb
ηb - sprawność bębna uwzględniająca opory przewijania liny i łożyskowania bębna.
Db - średnica nawojowa bębna linowego.
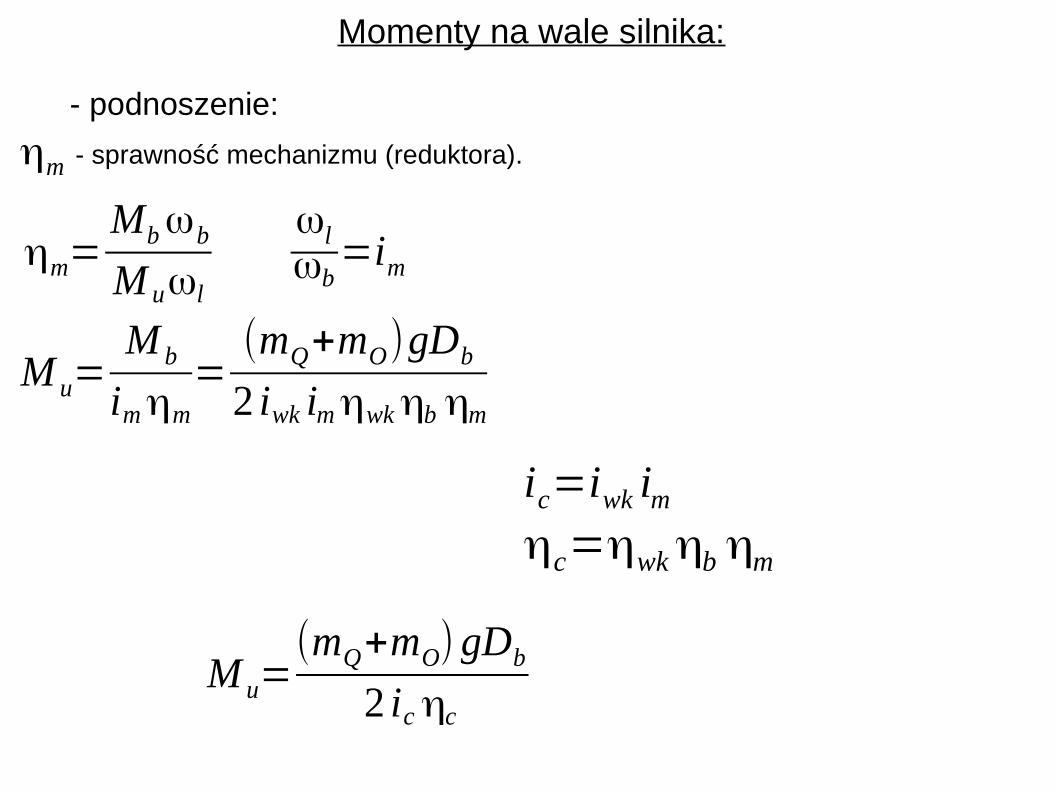
Momenty na wale silnika:
- podnoszenie:
ηm=Mb ωb
M uωl
ωlωb
=im
M u=M b
imηm
=(mQ+mO)gDb
2 iwk imηwk ηb ηm
ηm - sprawność mechanizmu (reduktora).
ic=iwk imηc=ηwk ηb ηm
M u=(mQ+mO) gDb
2 ic ηc
Momenty na wale silnika - opuszczanie:
ηmh=Muh ωl
M bh ωb
ω lωb
=im
M uh=M bh
im
ηmh
ηmh - sprawność mechanizmu (reduktora) przy opuszczaniu.
ηbh=M bh ωb
S lh υl
υlωb
=Db
2
M bh=S lh Db
2ηbh
ηwkh=Slh υlop
(mQ+mO)g υop
υlopυop
=iwk
S lh=(mQ+mO)g
iwk
ηwkh
M bh=(mQ+mO) gDb
2 iwk
ηwkh ηbh
M uh=(mQ+mO)gDb
2 iwk im
ηwkhηbhηmh
ic=iwk imic=iwk imηch=ηwkh ηbh ηmh
M uh=(mQ+mO)gD b
2 ic
ηch
M uh=Mu ηc ηch
Dla układów wysokosprawnych, dla których: ηch≈ηc
M uh=Mu ηc2
- opuszczanie (c.d.):
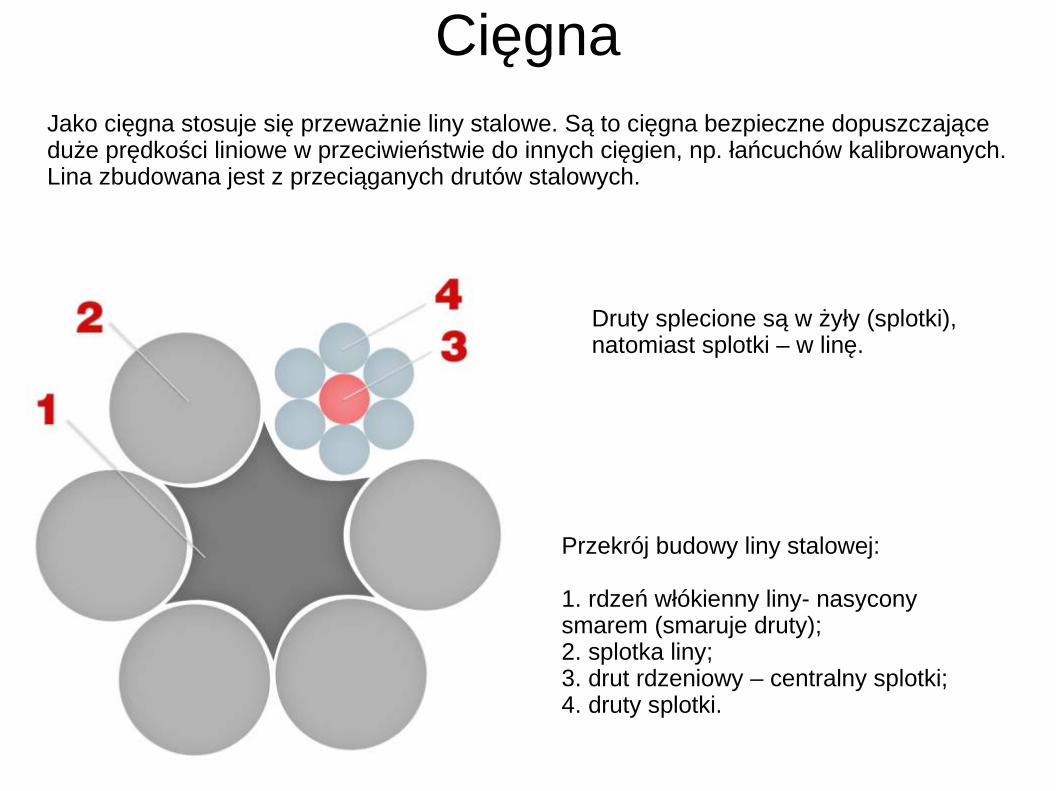
CięgnaJako cięgna stosuje się przeważnie liny stalowe. Są to cięgna bezpieczne dopuszczające duże prędkości liniowe w przeciwieństwie do innych cięgien, np. łańcuchów kalibrowanych.Lina zbudowana jest z przeciąganych drutów stalowych.
Przekrój budowy liny stalowej:
1. rdzeń włókienny liny- nasycony smarem (smaruje druty);2. splotka liny;3. drut rdzeniowy – centralny splotki;4. druty splotki.
Druty splecione są w żyły (splotki), natomiast splotki – w linę.
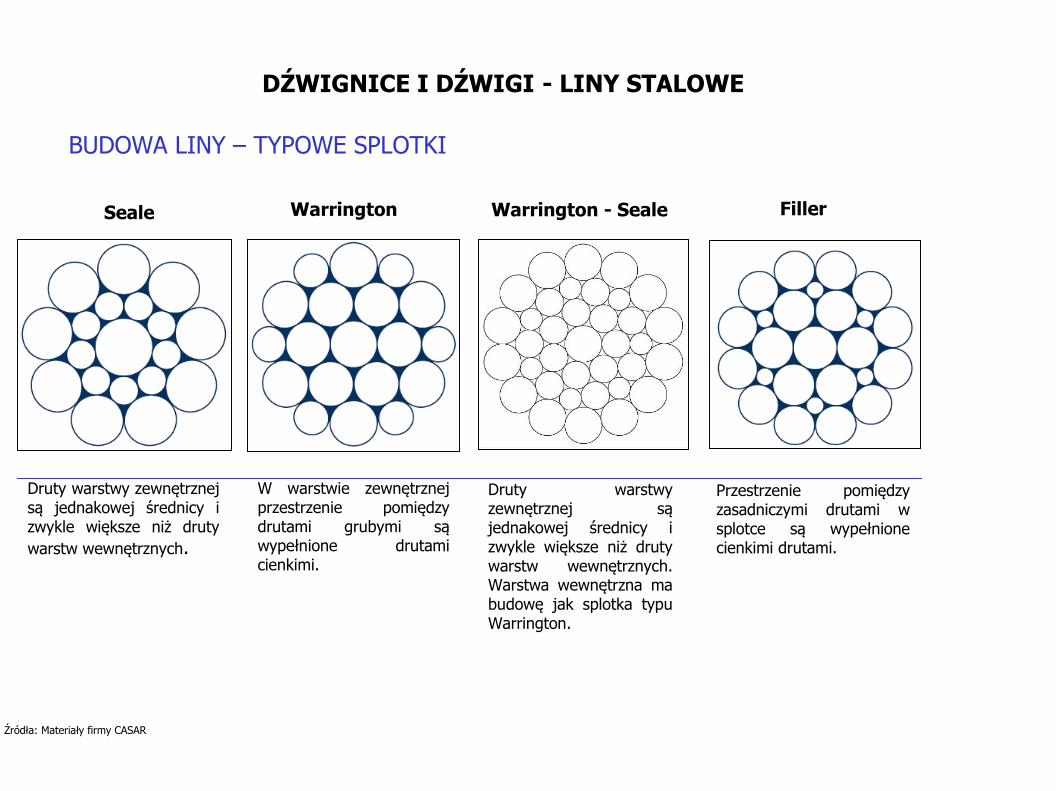
DŹWIGNICE I DŹWIGI - LINY STALOWE
BUDOWA LINY – TYPOWE SPLOTKI
Seale Warrington Filler
Druty warstwy zewnętrznej są jednakowej średnicy i zwykle większe niż druty warstw wewnętrznych.
W warstwie zewnętrznej przestrzenie pomiędzy drutami grubymi są wypełnione drutami cienkimi.
Przestrzenie pomiędzy zasadniczymi drutami w splotce są wypełnione cienkimi drutami.
Źródła: Materiały firmy CASAR
Warrington - Seale
Druty warstwy zewnętrznej są jednakowej średnicy i zwykle większe niż druty warstw wewnętrznych. Warstwa wewnętrzna ma budowę jak splotka typu Warrington.
DŹWIGNICE I DŹWIGI - LINY STALOWE
BUDOWA LINY - SPLOTKI
Źródła: A. Tytko., „Transport linowy, cz.3”, UWN-D, Kraków, 2008
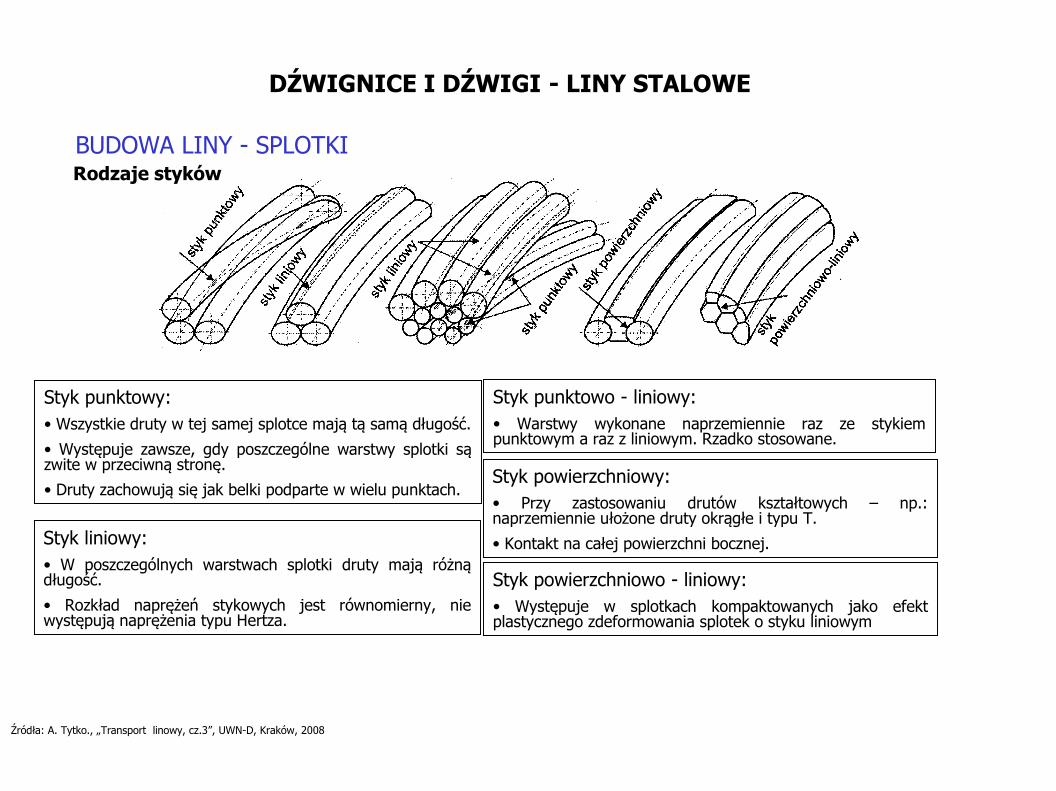
Rodzaje styków
Styk punktowy:• Wszystkie druty w tej samej splotce mają tą samą długość.
• Występuje zawsze, gdy poszczególne warstwy splotki są zwite w przeciwną stronę.
• Druty zachowują się jak belki podparte w wielu punktach.
Styk liniowy:• W poszczególnych warstwach splotki druty mają różną długość.
• Rozkład naprężeń stykowych jest równomierny, nie występują naprężenia typu Hertza.
Styk punktowo - liniowy:• Warstwy wykonane naprzemiennie raz ze stykiem punktowym a raz z liniowym. Rzadko stosowane.
Styk powierzchniowy:• Przy zastosowaniu drutów kształtowych – np.: naprzemiennie ułożone druty okrągłe i typu T.
• Kontakt na całej powierzchni bocznej.
Styk powierzchniowo - liniowy:• Występuje w splotkach kompaktowanych jako efekt plastycznego zdeformowania splotek o styku liniowym
DŹWIGNICE I DŹWIGI - LINY STALOWE
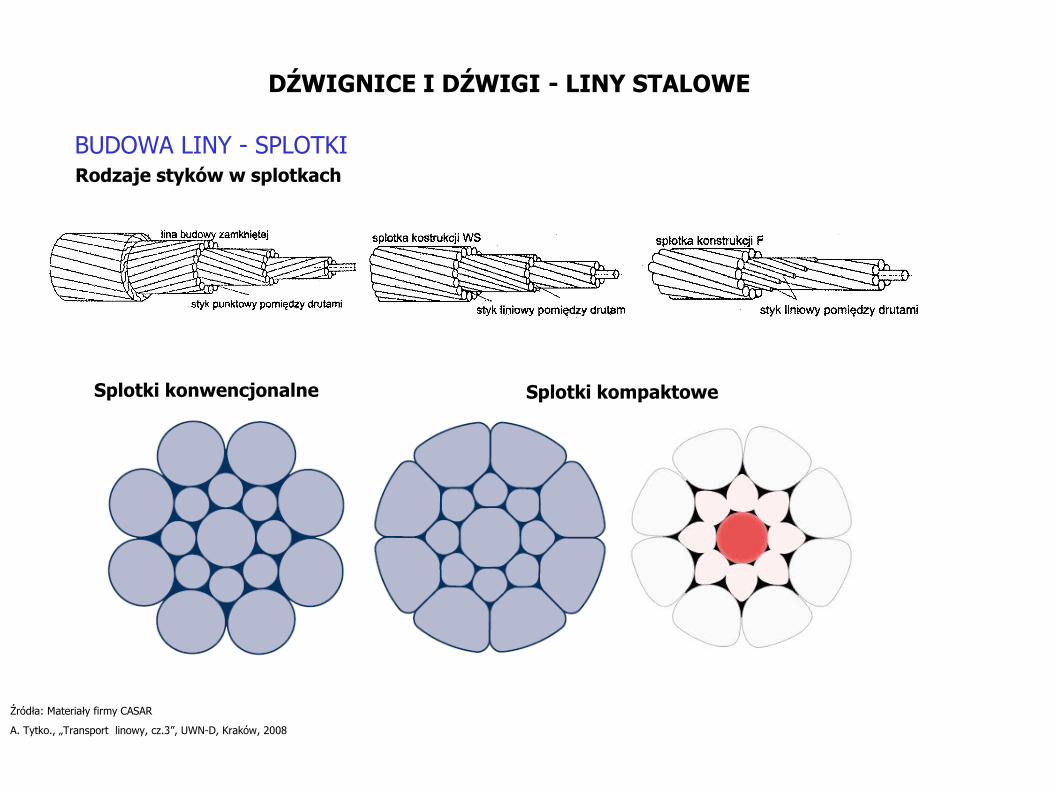
BUDOWA LINY - SPLOTKI
Splotki konwencjonalne Splotki kompaktowe
Źródła: Materiały firmy CASAR
A. Tytko., „Transport linowy, cz.3”, UWN-D, Kraków, 2008
Rodzaje styków w splotkach
DŹWIGNICE I DŹWIGI - LINY STALOWE
BUDOWA LINY – SPLOTKI KOMPAKTOWE
Rysunki: A. Tytko., „Transport linowy, cz.3”, UWN-D, Kraków, 2008
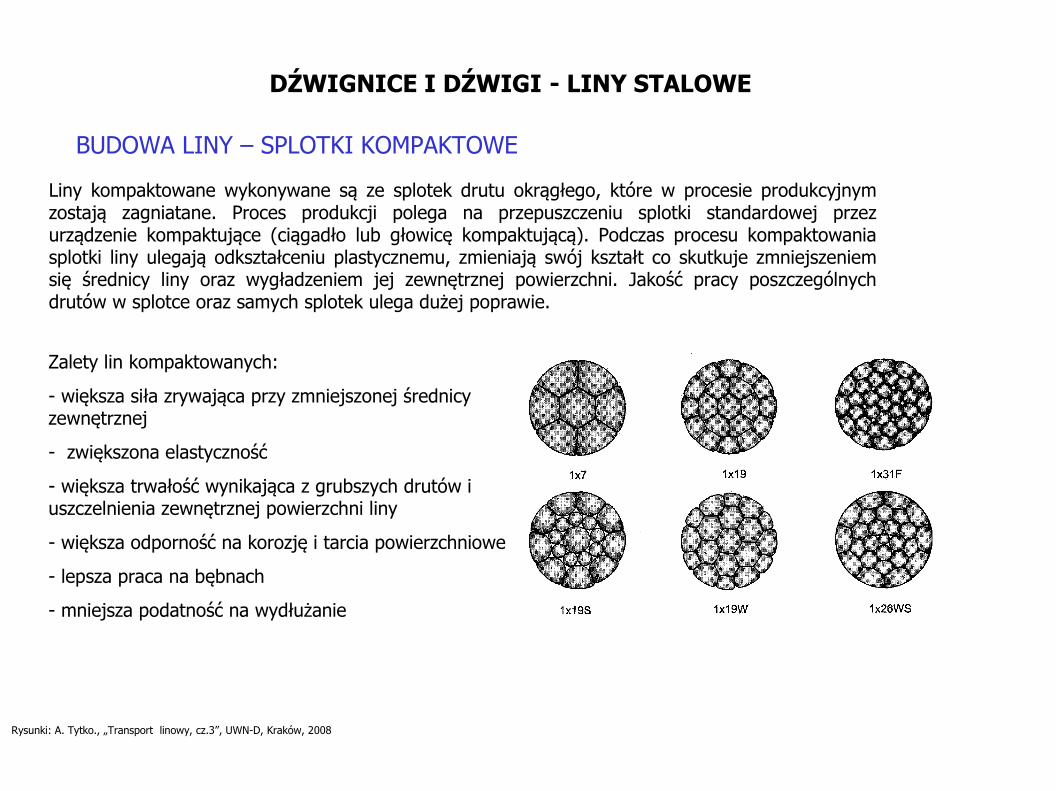
Zalety lin kompaktowanych:
- większa siła zrywająca przy zmniejszonej średnicy zewnętrznej
- zwiększona elastyczność
- większa trwałość wynikająca z grubszych drutów i uszczelnienia zewnętrznej powierzchni liny
- większa odporność na korozję i tarcia powierzchniowe
- lepsza praca na bębnach
- mniejsza podatność na wydłużanie
Liny kompaktowane wykonywane są ze splotek drutu okrągłego, które w procesie produkcyjnym zostają zagniatane. Proces produkcji polega na przepuszczeniu splotki standardowej przez urządzenie kompaktujące (ciągadło lub głowicę kompaktującą). Podczas procesu kompaktowania splotki liny ulegają odkształceniu plastycznemu, zmieniają swój kształt co skutkuje zmniejszeniem się średnicy liny oraz wygładzeniem jej zewnętrznej powierzchni. Jakość pracy poszczególnych drutów w splotce oraz samych splotek ulega dużej poprawie.
DŹWIGNICE I DŹWIGI - LINY STALOWE
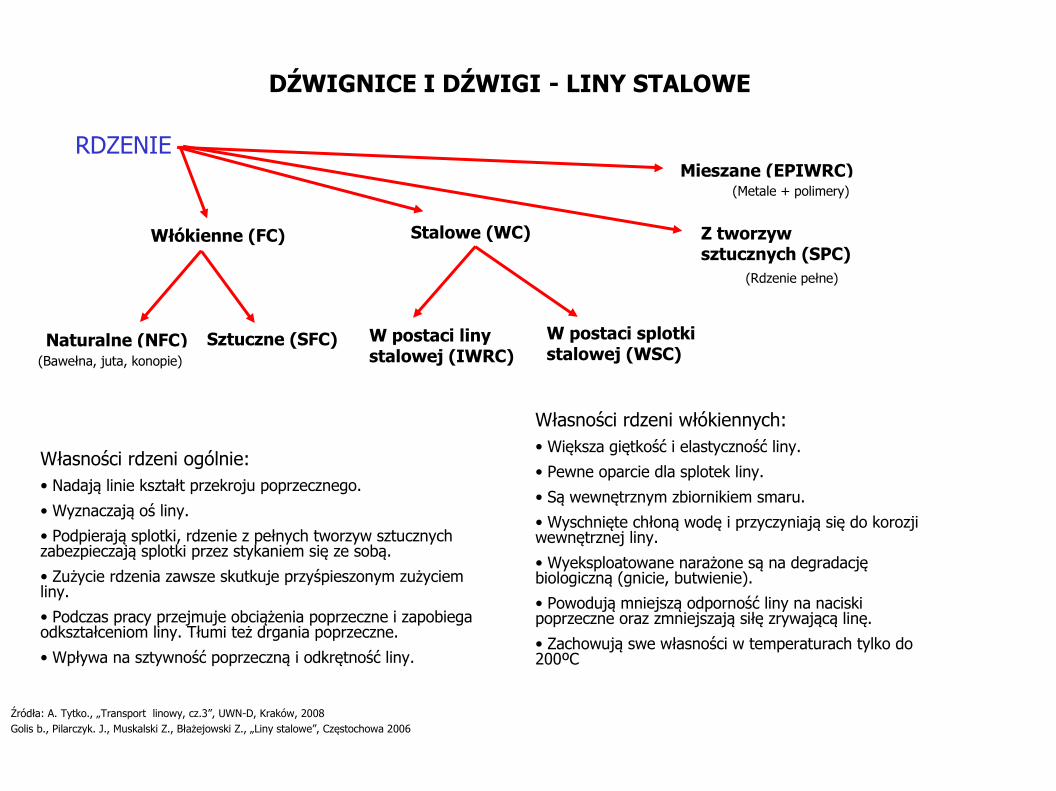
RDZENIE
Źródła: A. Tytko., „Transport linowy, cz.3”, UWN-D, Kraków, 2008 Golis b., Pilarczyk. J., Muskalski Z., Błażejowski Z., „Liny stalowe”, Częstochowa 2006
Sztuczne (SFC)
Włókienne (FC)
Naturalne (NFC)(Bawełna, juta, konopie)
Stalowe (WC)
W postaci liny stalowej (IWRC)
W postaci splotki stalowej (WSC)
Mieszane (EPIWRC)
Z tworzyw sztucznych (SPC)
Własności rdzeni włókiennych:• Większa giętkość i elastyczność liny.
• Pewne oparcie dla splotek liny.
• Są wewnętrznym zbiornikiem smaru.
• Wyschnięte chłoną wodę i przyczyniają się do korozji wewnętrznej liny.
• Wyeksploatowane narażone są na degradację biologiczną (gnicie, butwienie).
• Powodują mniejszą odporność liny na naciski poprzeczne oraz zmniejszają siłę zrywającą linę.
• Zachowują swe własności w temperaturach tylko do 200ºC
Własności rdzeni ogólnie:• Nadają linie kształt przekroju poprzecznego.
• Wyznaczają oś liny.
• Podpierają splotki, rdzenie z pełnych tworzyw sztucznych zabezpieczają splotki przez stykaniem się ze sobą.
• Zużycie rdzenia zawsze skutkuje przyśpieszonym zużyciem liny.
• Podczas pracy przejmuje obciążenia poprzeczne i zapobiega odkształceniom liny. Tłumi też drgania poprzeczne.
• Wpływa na sztywność poprzeczną i odkrętność liny.
(Rdzenie pełne)
(Metale + polimery)
DŹWIGNICE I DŹWIGI - LINY STALOWE
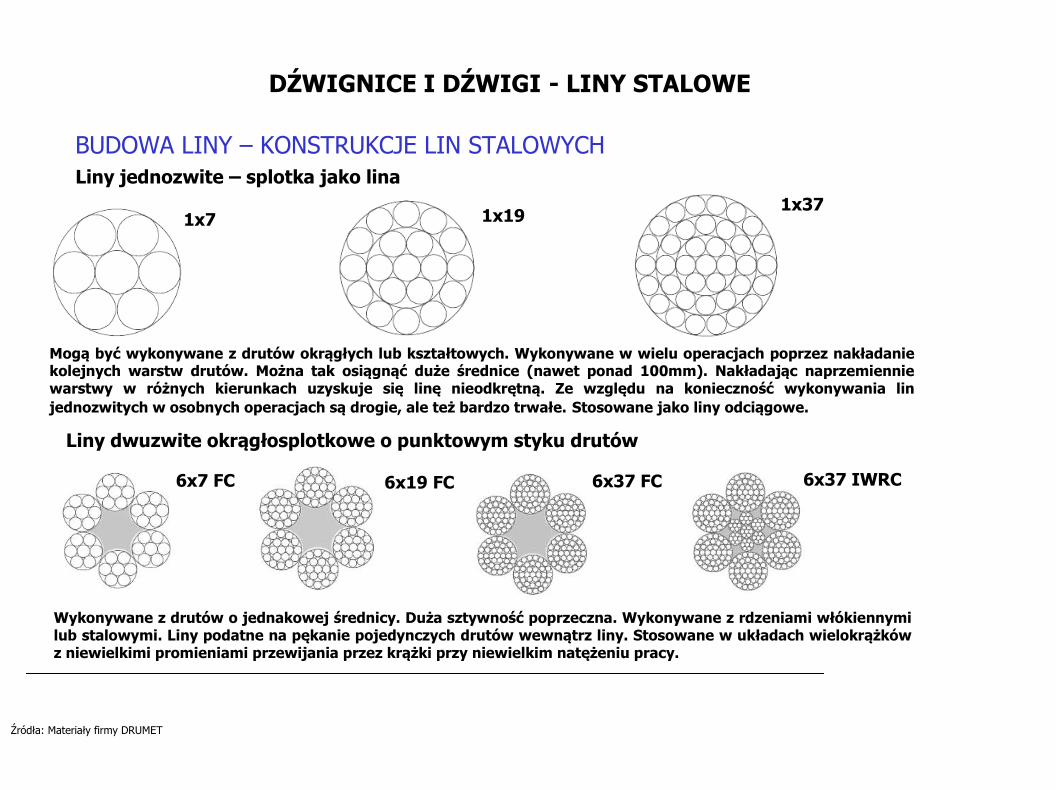
BUDOWA LINY – KONSTRUKCJE LIN STALOWYCHLiny jednozwite – splotka jako lina
Wykonywane z drutów o jednakowej średnicy. Duża sztywność poprzeczna. Wykonywane z rdzeniami włókiennymi lub stalowymi. Liny podatne na pękanie pojedynczych drutów wewnątrz liny. Stosowane w układach wielokrążków z niewielkimi promieniami przewijania przez krążki przy niewielkim natężeniu pracy.
Źródła: Materiały firmy DRUMET
1x7 1x191x37
Mogą być wykonywane z drutów okrągłych lub kształtowych. Wykonywane w wielu operacjach poprzez nakładanie kolejnych warstw drutów. Można tak osiągnąć duże średnice (nawet ponad 100mm). Nakładając naprzemiennie warstwy w różnych kierunkach uzyskuje się linę nieodkrętną. Ze względu na konieczność wykonywania lin jednozwitych w osobnych operacjach są drogie, ale też bardzo trwałe. Stosowane jako liny odciągowe.
Liny dwuzwite okrągłosplotkowe o punktowym styku drutów
6x7 FC 6x19 FC 6x37 FC 6x37 IWRC
DŹWIGNICE I DŹWIGI - LINY STALOWE
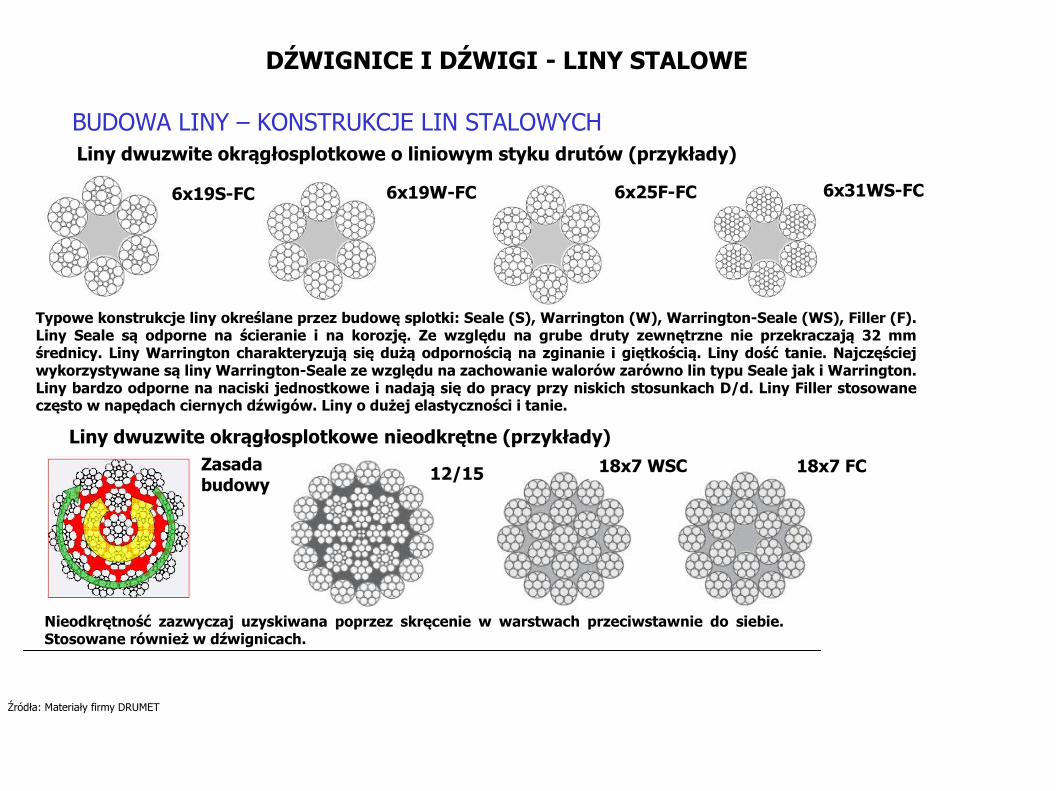
BUDOWA LINY – KONSTRUKCJE LIN STALOWYCHLiny dwuzwite okrągłosplotkowe o liniowym styku drutów (przykłady)
Źródła: Materiały firmy DRUMET
6x19S-FC 6x19W-FC 6x25F-FC
Typowe konstrukcje liny określane przez budowę splotki: Seale (S), Warrington (W), Warrington-Seale (WS), Filler (F). Liny Seale są odporne na ścieranie i na korozję. Ze względu na grube druty zewnętrzne nie przekraczają 32 mm średnicy. Liny Warrington charakteryzują się dużą odpornością na zginanie i giętkością. Liny dość tanie. Najczęściej wykorzystywane są liny Warrington-Seale ze względu na zachowanie walorów zarówno lin typu Seale jak i Warrington. Liny bardzo odporne na naciski jednostkowe i nadają się do pracy przy niskich stosunkach D/d. Liny Filler stosowane często w napędach ciernych dźwigów. Liny o dużej elastyczności i tanie.
Liny dwuzwite okrągłosplotkowe nieodkrętne (przykłady)
6x31WS-FC
Zasada budowy
18x7 WSC 18x7 FC12/15
Nieodkrętność zazwyczaj uzyskiwana poprzez skręcenie w warstwach przeciwstawnie do siebie. Stosowane również w dźwignicach.
DŹWIGNICE I DŹWIGI - LINY STALOWE
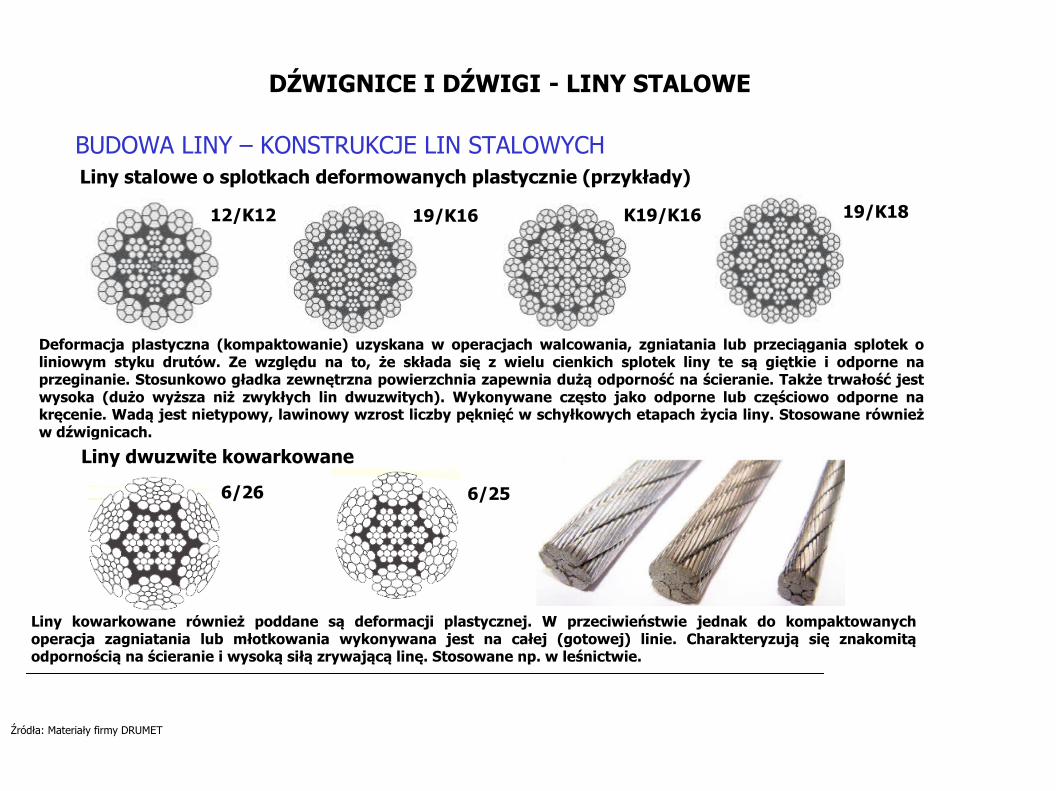
BUDOWA LINY – KONSTRUKCJE LIN STALOWYCHLiny stalowe o splotkach deformowanych plastycznie (przykłady)
Źródła: Materiały firmy DRUMET
Deformacja plastyczna (kompaktowanie) uzyskana w operacjach walcowania, zgniatania lub przeciągania splotek o liniowym styku drutów. Ze względu na to, że składa się z wielu cienkich splotek liny te są giętkie i odporne na przeginanie. Stosunkowo gładka zewnętrzna powierzchnia zapewnia dużą odporność na ścieranie. Także trwałość jest wysoka (dużo wyższa niż zwykłych lin dwuzwitych). Wykonywane często jako odporne lub częściowo odporne na kręcenie. Wadą jest nietypowy, lawinowy wzrost liczby pęknięć w schyłkowych etapach życia liny. Stosowane również w dźwignicach.
Liny dwuzwite kowarkowane
6/25
12/K12 19/K16 K19/K16 19/K18
Liny kowarkowane również poddane są deformacji plastycznej. W przeciwieństwie jednak do kompaktowanych operacja zagniatania lub młotkowania wykonywana jest na całej (gotowej) linie. Charakteryzują się znakomitą odpornością na ścieranie i wysoką siłą zrywającą linę. Stosowane np. w leśnictwie.
6/26
DŹWIGNICE I DŹWIGI - LINY STALOWE
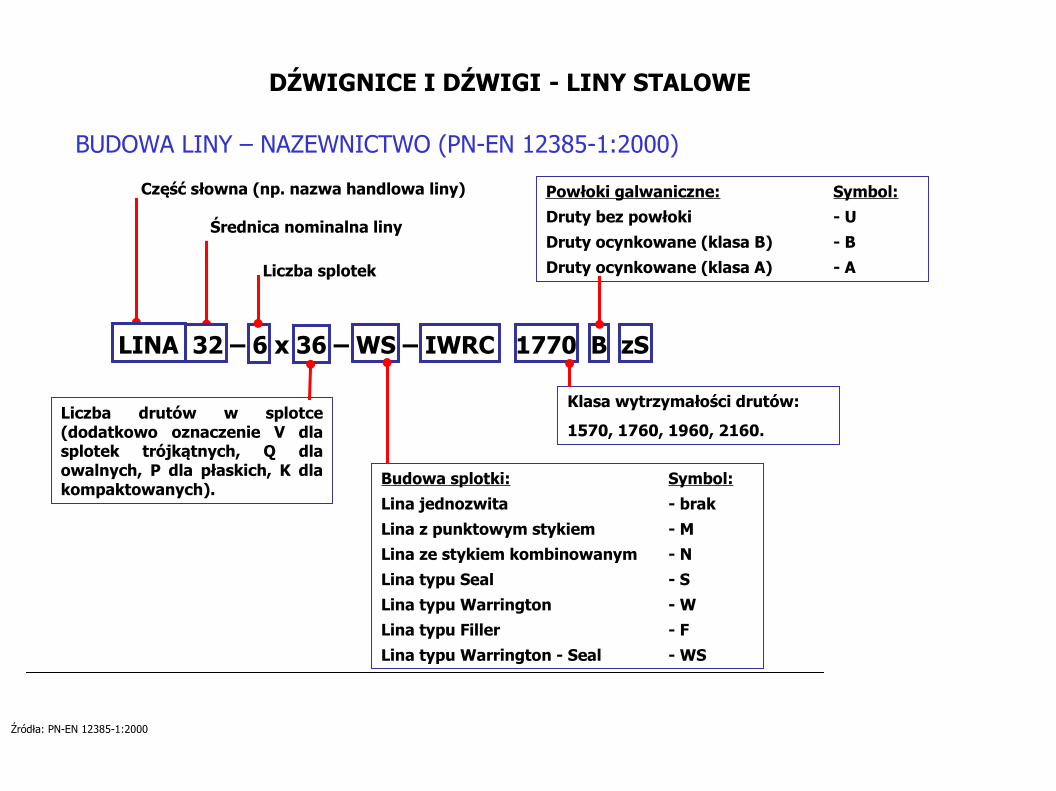
BUDOWA LINY – NAZEWNICTWO (PN-EN 12385-1:2000)
Część słowna (np. nazwa handlowa liny)
Źródła: PN-EN 12385-1:2000
Średnica nominalna liny
LINA 32 – 6 x 36 – WS – IWRC 1770 B zS
Liczba splotek
Liczba drutów w splotce (dodatkowo oznaczenie V dla splotek trójkątnych, Q dla owalnych, P dla płaskich, K dla kompaktowanych).
Budowa splotki: Symbol:
Lina jednozwita - brak
Lina z punktowym stykiem - M
Lina ze stykiem kombinowanym - N
Lina typu Seal - S
Lina typu Warrington - W
Lina typu Filler - F
Lina typu Warrington - Seal - WS
Klasa wytrzymałości drutów:
1570, 1760, 1960, 2160.
Powłoki galwaniczne: Symbol:
Druty bez powłoki - U
Druty ocynkowane (klasa B) - B
Druty ocynkowane (klasa A) - A
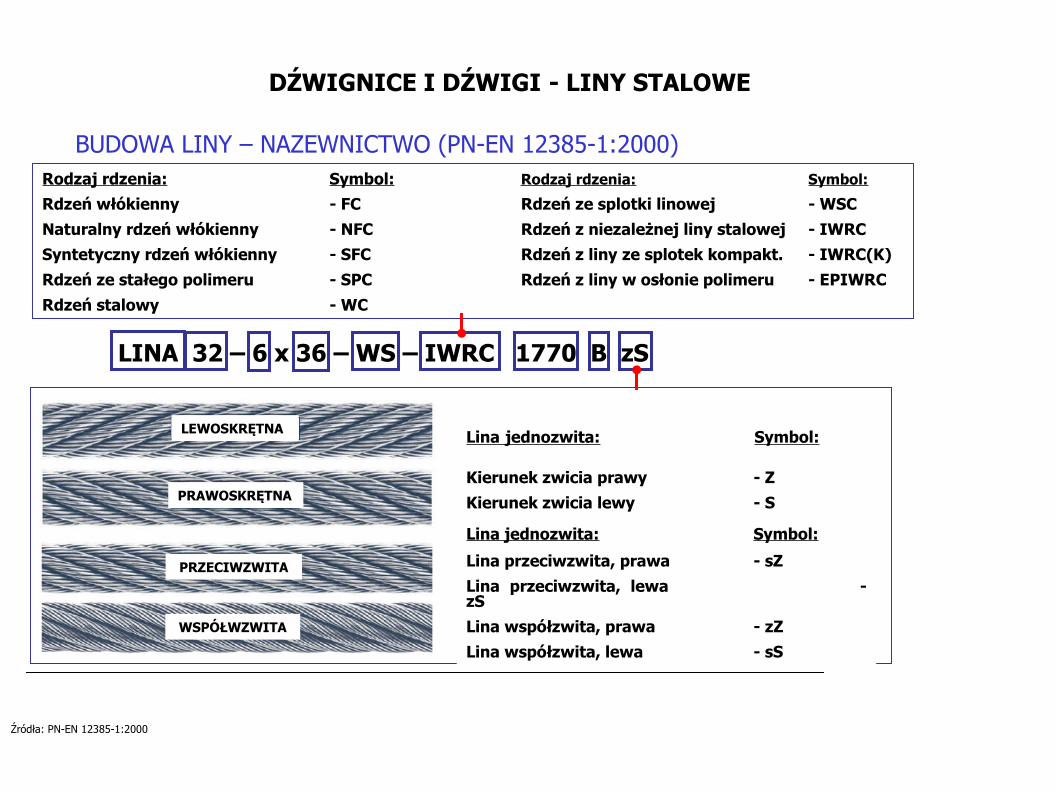
DŹWIGNICE I DŹWIGI - LINY STALOWE
BUDOWA LINY – NAZEWNICTWO (PN-EN 12385-1:2000)
Część słowna (np. nazwa handlowa liny)
Źródła: PN-EN 12385-1:2000
LEWOSKRĘTNA
PRAWOSKRĘTNA
PRZECIWZWITA
WSPÓŁWZWITA
LINA 32 – 6 x 36 – WS – IWRC 1770 B zS
Rodzaj rdzenia: Symbol: Rodzaj rdzenia: Symbol:
Rdzeń włókienny - FC Rdzeń ze splotki linowej - WSC
Naturalny rdzeń włókienny - NFC Rdzeń z niezależnej liny stalowej - IWRC
Syntetyczny rdzeń włókienny - SFC Rdzeń z liny ze splotek kompakt. - IWRC(K)
Rdzeń ze stałego polimeru - SPC Rdzeń z liny w osłonie polimeru - EPIWRC
Rdzeń stalowy - WC
Lina jednozwita: Symbol:
Kierunek zwicia prawy - Z
Kierunek zwicia lewy - S
Lina jednozwita: Symbol: Lina przeciwzwita, prawa - sZ
Lina przeciwzwita, lewa - zS
Lina współzwita, prawa - zZ
Lina współzwita, lewa - sS
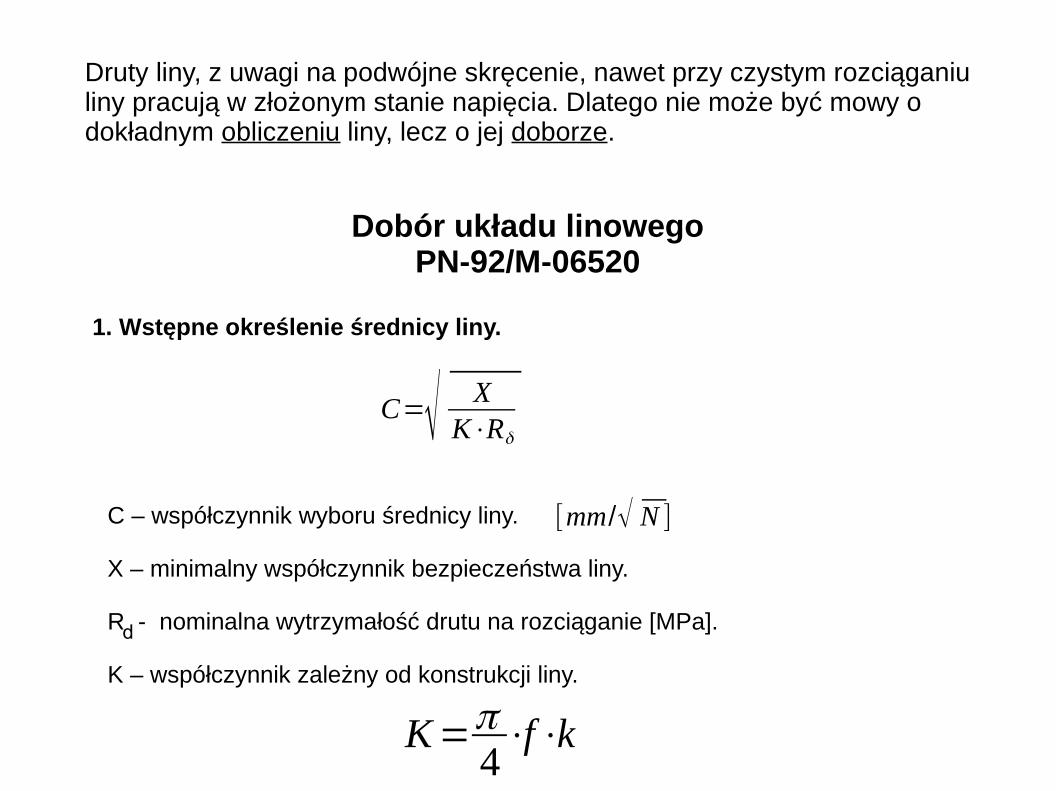
Druty liny, z uwagi na podwójne skręcenie, nawet przy czystym rozciąganiu liny pracują w złożonym stanie napięcia. Dlatego nie może być mowy o dokładnym obliczeniu liny, lecz o jej doborze.
Dobór układu linowegoPN-92/M-06520
1. Wstępne określenie średnicy liny.
C=√ XK⋅Rδ
C – współczynnik wyboru średnicy liny.
X – minimalny współczynnik bezpieczeństwa liny.
R - nominalna wytrzymałość drutu na rozciąganie [MPa].
K – współczynnik zależny od konstrukcji liny.
[mm/√ N ]
d
K=π4⋅f⋅k
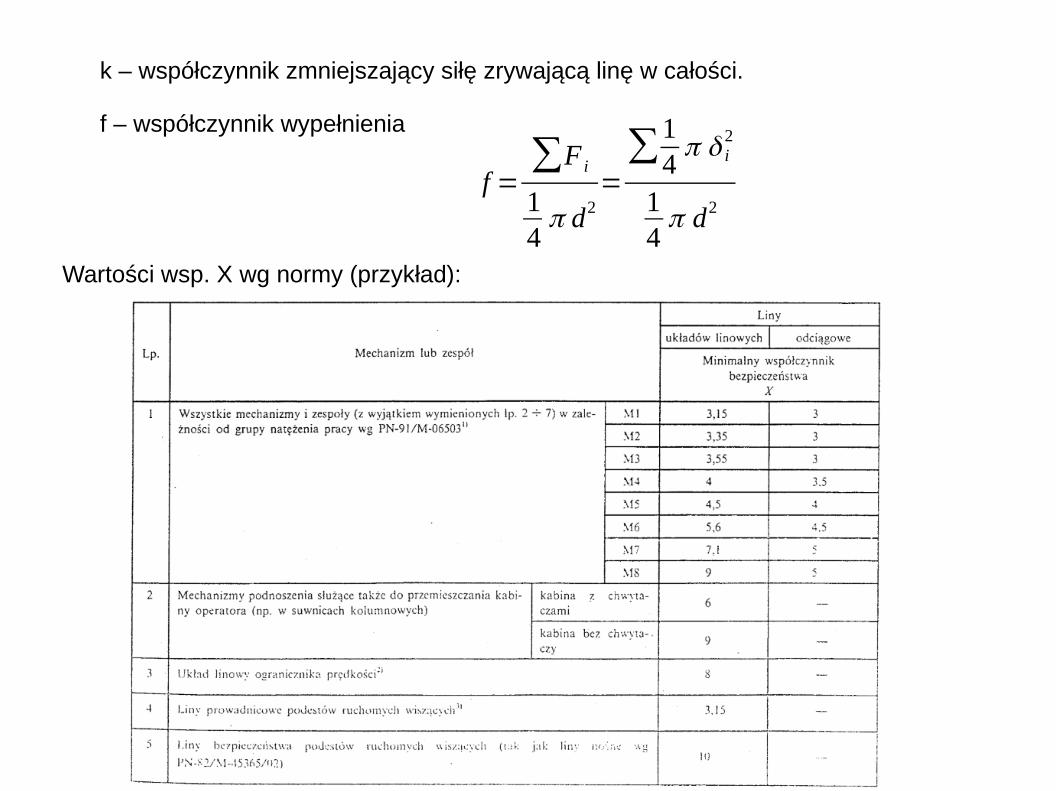
k – współczynnik zmniejszający siłę zrywającą linę w całości.
f – współczynnik wypełnienia
f =∑F i
14
π d2=∑1
4π δ i
2
14
π d2
Wartości wsp. X wg normy (przykład):
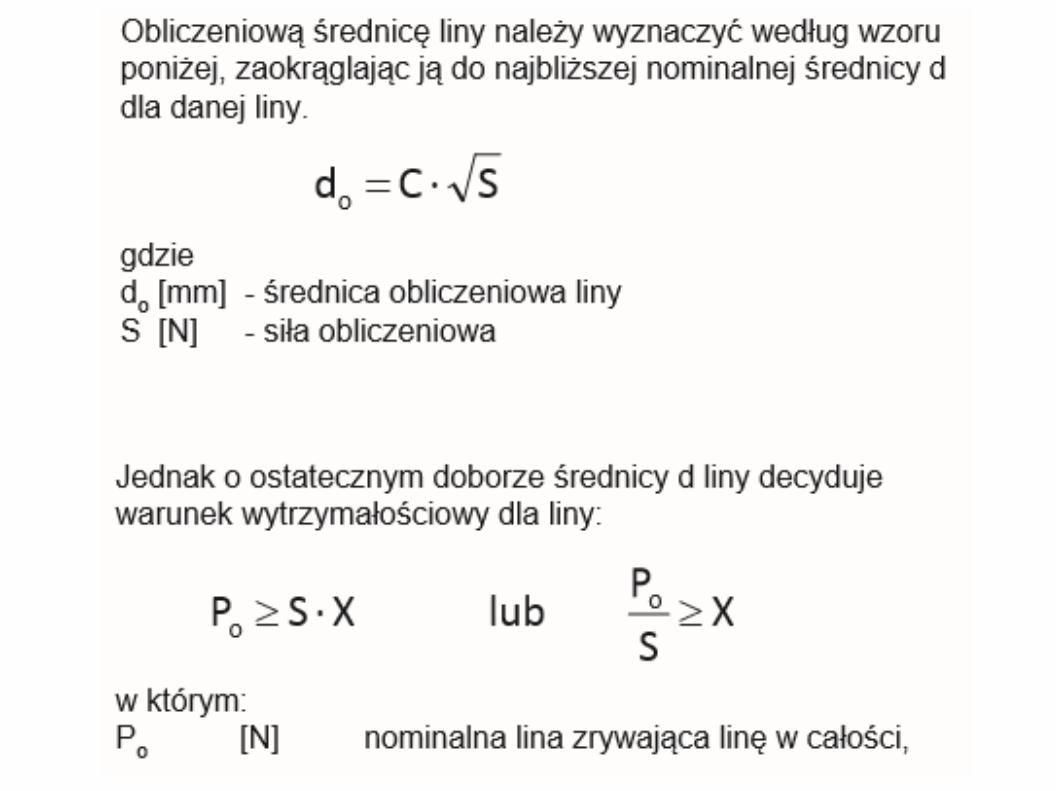
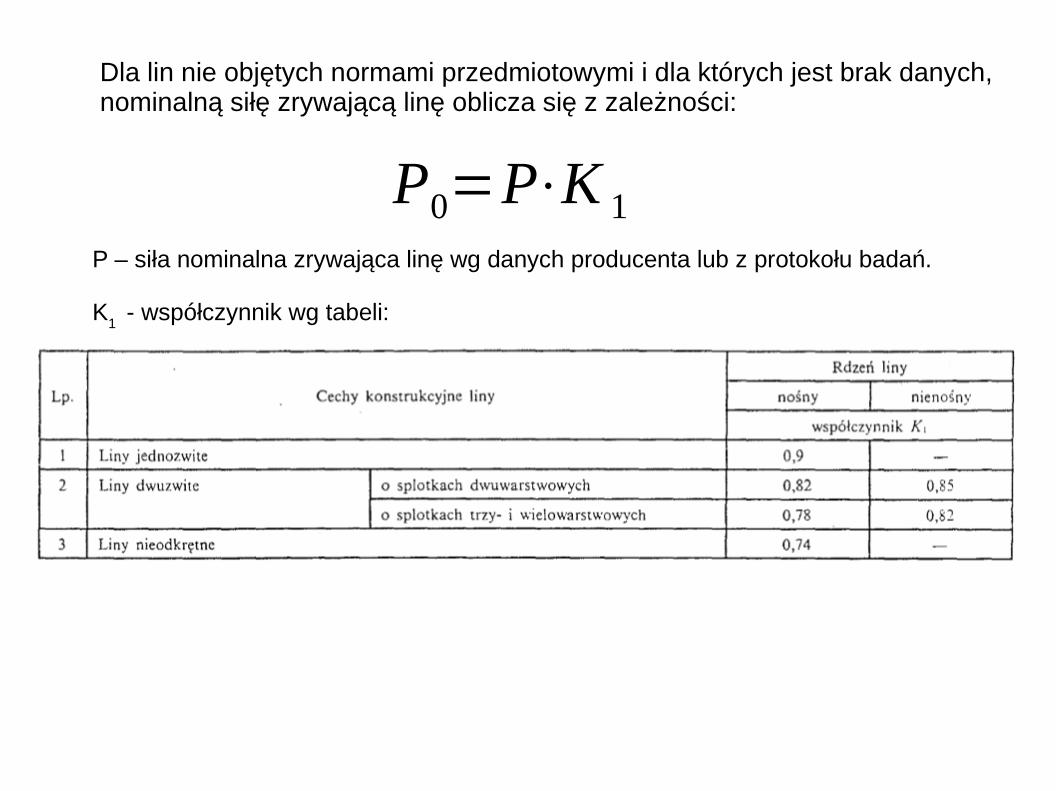
Dla lin nie objętych normami przedmiotowymi i dla których jest brak danych, nominalną siłę zrywającą linę oblicza się z zależności:
P0=P⋅K 1P – siła nominalna zrywająca linę wg danych producenta lub z protokołu badań.
K1 - współczynnik wg tabeli:
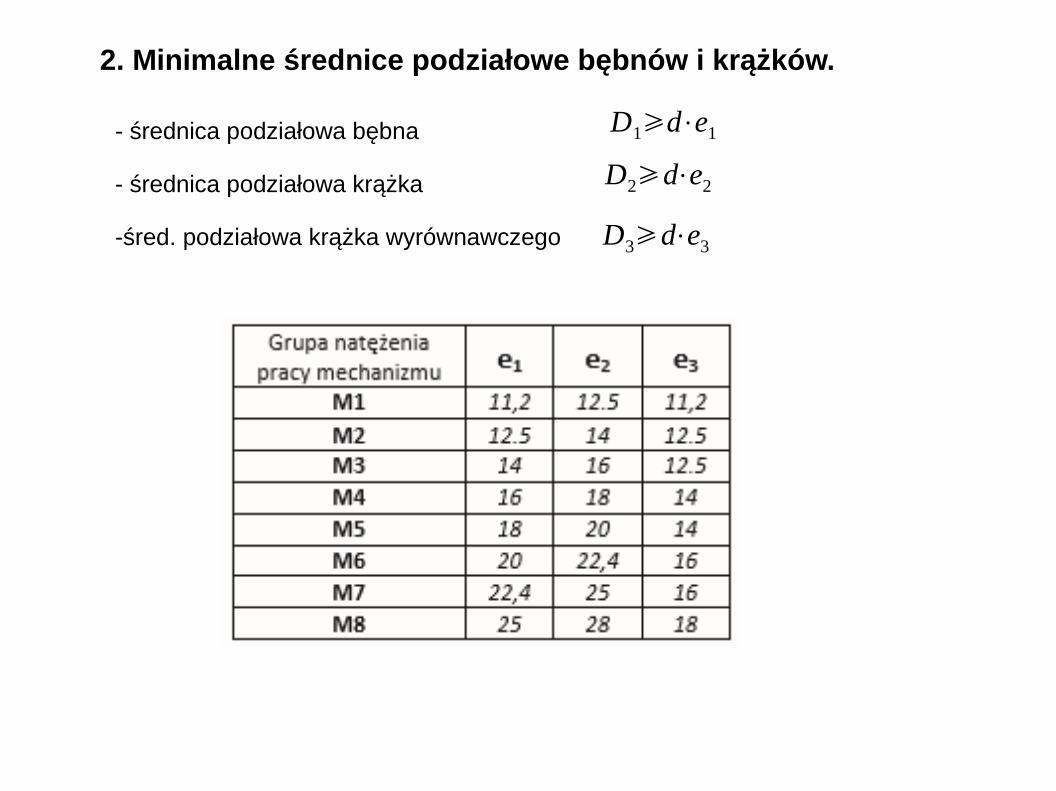
2. Minimalne średnice podziałowe bębnów i krążków.
- średnica podziałowa bębna
- średnica podziałowa krążka
-śred. podziałowa krążka wyrównawczego
D1⩾d⋅e1
D2⩾d⋅e2
D3⩾d⋅e3
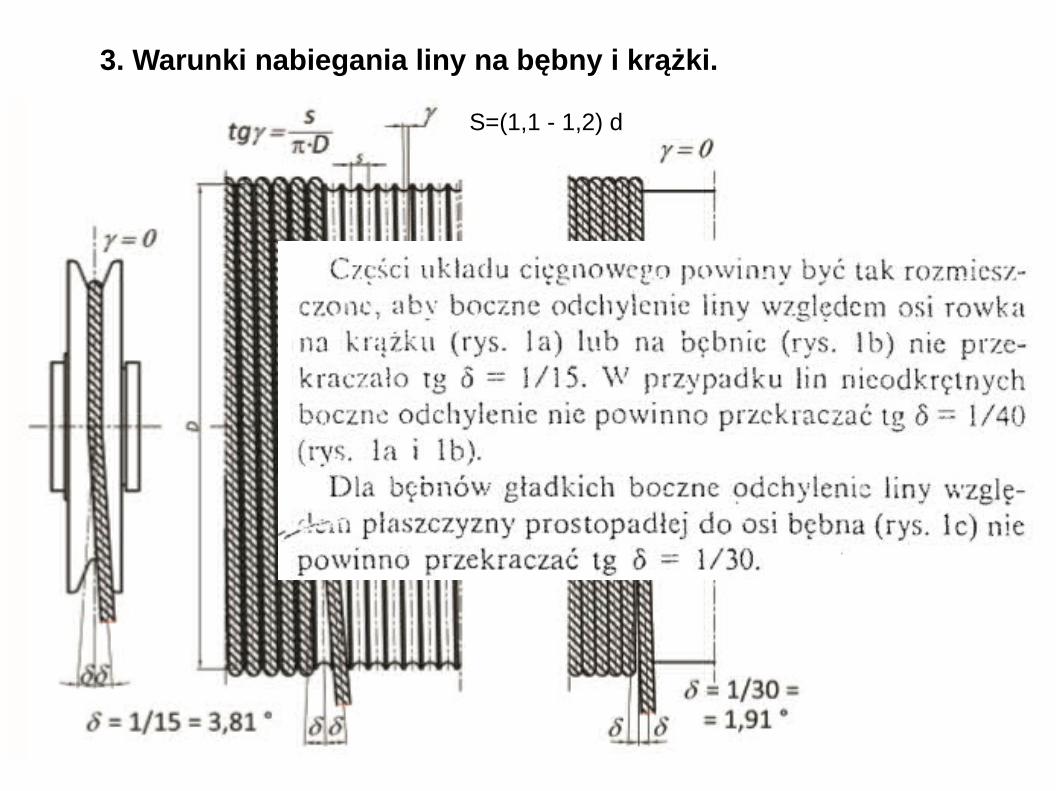
3. Warunki nabiegania liny na bębny i krążki.
S=(1,1 - 1,2) d
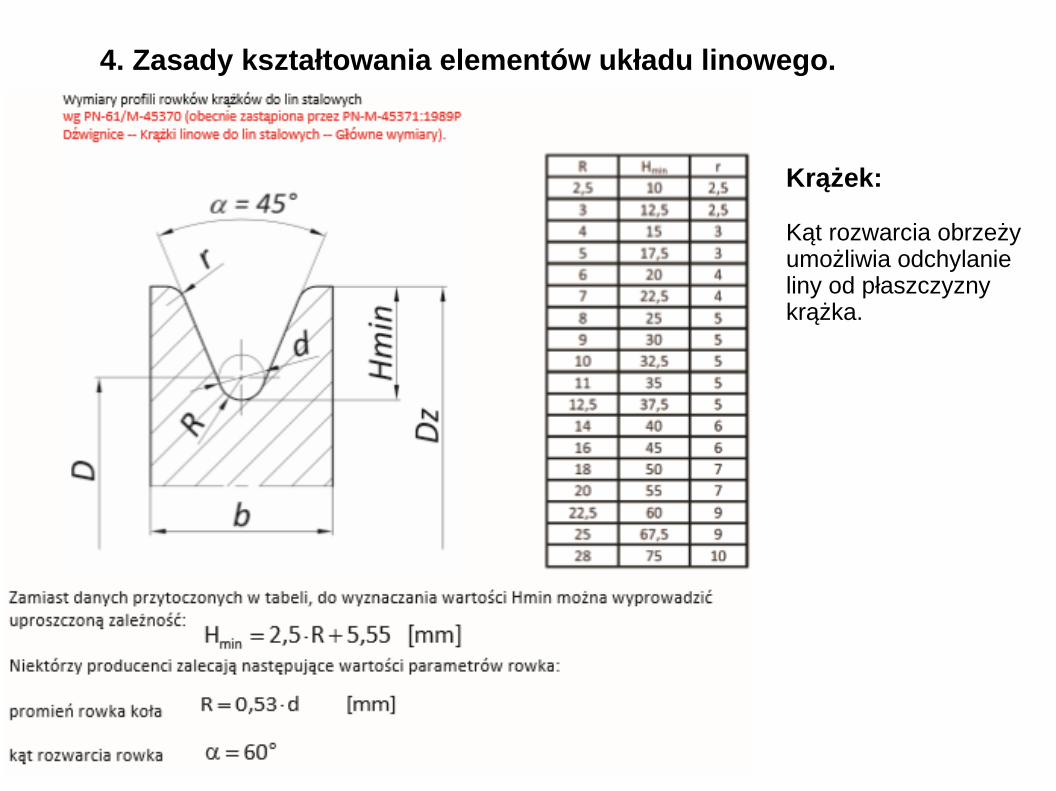
4. Zasady kształtowania elementów układu linowego.
Krążek:
Kąt rozwarcia obrzeży umożliwia odchylanie liny od płaszczyzny krążka.
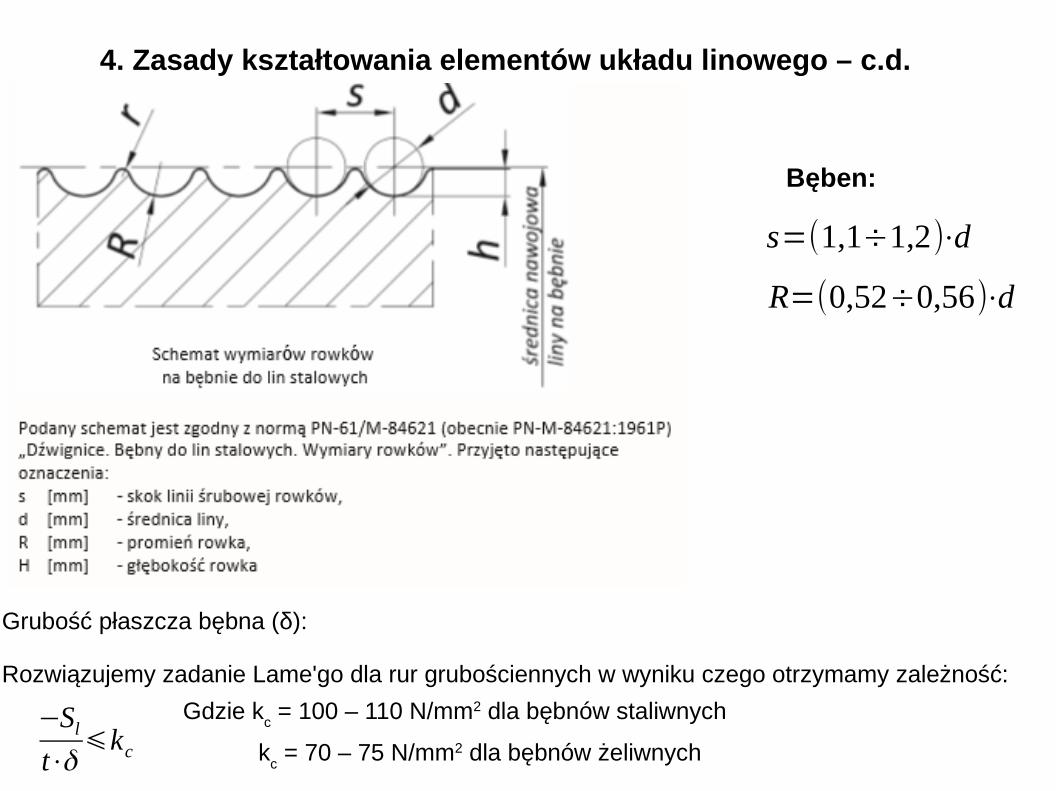
4. Zasady kształtowania elementów układu linowego – c.d.
Bęben:
s=(1,1÷1,2)⋅d
R=(0,52÷0,56)⋅d
Grubość płaszcza bębna (δ):
Rozwiązujemy zadanie Lame'go dla rur grubościennych w wyniku czego otrzymamy zależność:
−Sl
t⋅δ⩽kc
Gdzie kc = 100 – 110 N/mm2 dla bębnów staliwnych
kc = 70 – 75 N/mm2 dla bębnów żeliwnych
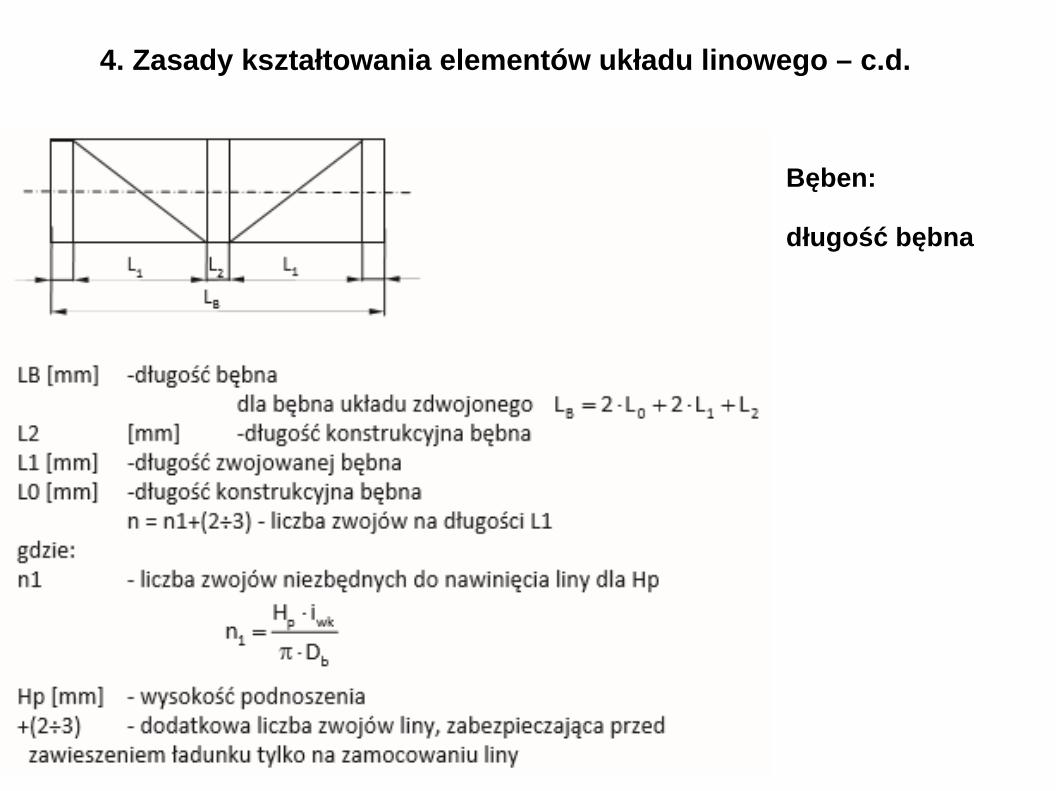
4. Zasady kształtowania elementów układu linowego – c.d.
Bęben:
długość bębna
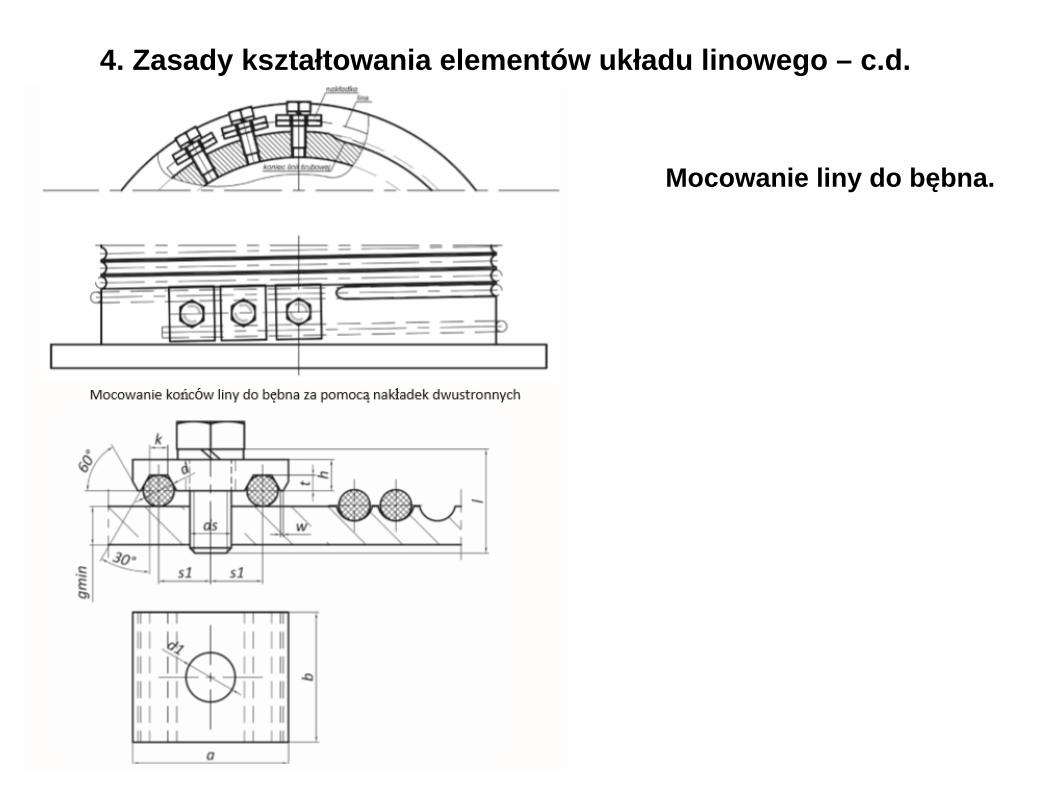
4. Zasady kształtowania elementów układu linowego – c.d.
Mocowanie liny do bębna.
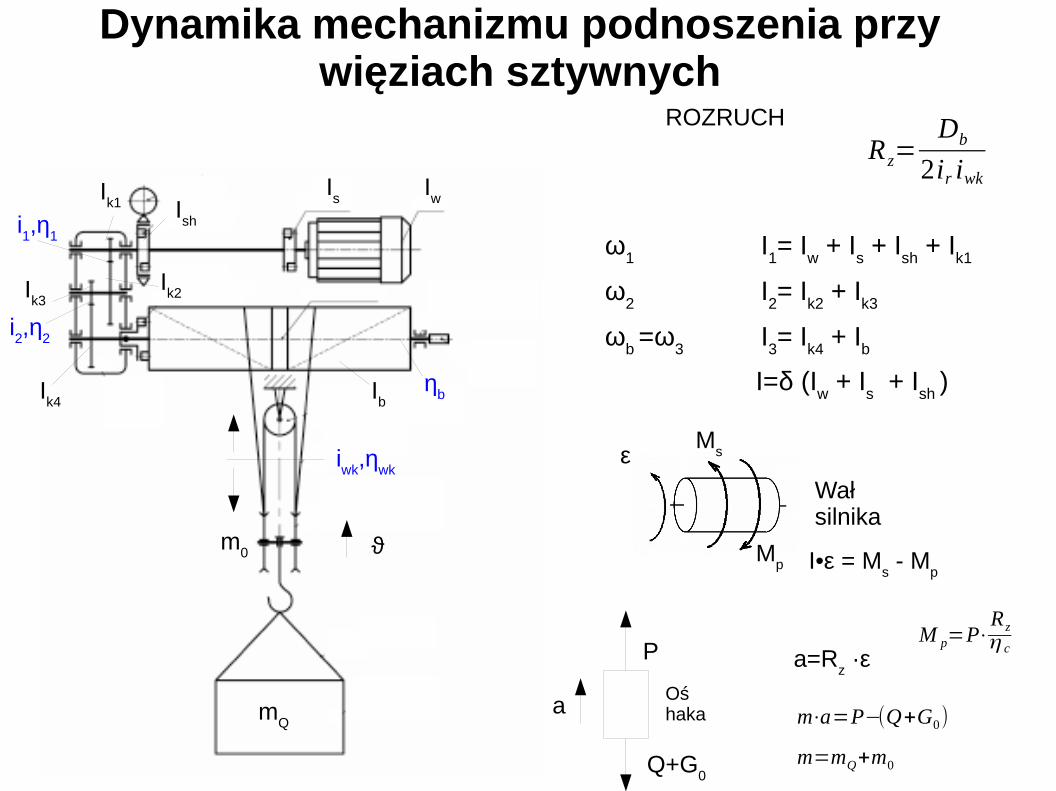
Dynamika mechanizmu podnoszenia przy więziach sztywnych
Is
Iw
Ish
Ik1
Ik2I
k3
Ik4
i1,η
1
i2,η
2
Ib
ηb
iwk
,ηwk
m0 ϑ
mQ
ROZRUCH
R z=Db
2ir iwk
ω1 I
1= I
w + I
s + I
sh + I
k1
ω2 I
2= I
k2 + I
k3
ωb =ω
3 I
3= I
k4 + I
b
I=δ (Iw + I
s + I
sh )
εM
s
Mp
Wał silnika
I•ε = Ms - M
p
a
a=Rz ·εP
Q+G0
M p=P⋅R zη c
m⋅a=P−(Q+G0)
m=mQ+m0
Oś haka
Dynamika mechanizmu podnoszenia przy więziach sztywnych -c.d.
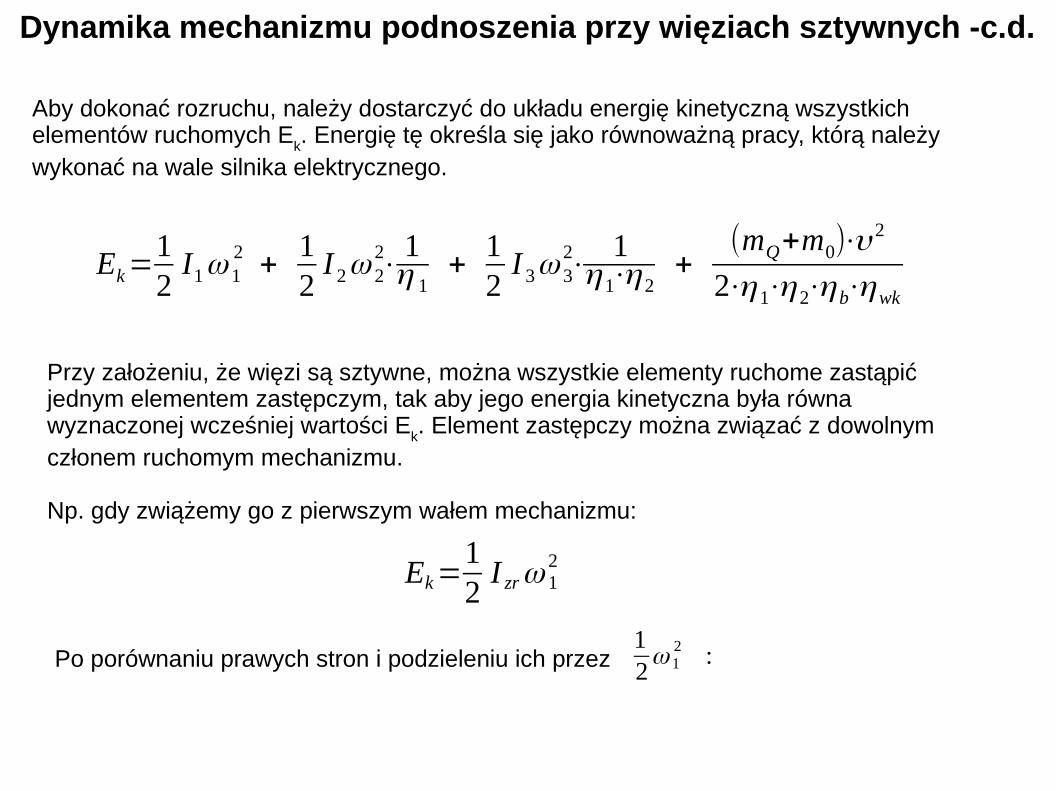
Aby dokonać rozruchu, należy dostarczyć do układu energię kinetyczną wszystkich elementów ruchomych E
k. Energię tę określa się jako równoważną pracy, którą należy
wykonać na wale silnika elektrycznego.
Ek=12
I1ω 12 + 1
2I 2ω 2
2⋅ 1η 1
+ 12
I 3ω 32⋅ 1η1⋅η2
+(mQ+m0)⋅υ
2
2⋅η1⋅η2⋅ηb⋅ηwk
Przy założeniu, że więzi są sztywne, można wszystkie elementy ruchome zastąpić jednym elementem zastępczym, tak aby jego energia kinetyczna była równa wyznaczonej wcześniej wartości E
k. Element zastępczy można związać z dowolnym
członem ruchomym mechanizmu.
Np. gdy zwiążemy go z pierwszym wałem mechanizmu:
Ek=12
I zrω 12
Po porównaniu prawych stron i podzieleniu ich przez 12ω 1
2 :
Dynamika mechanizmu podnoszenia przy więziach sztywnych -c.d.
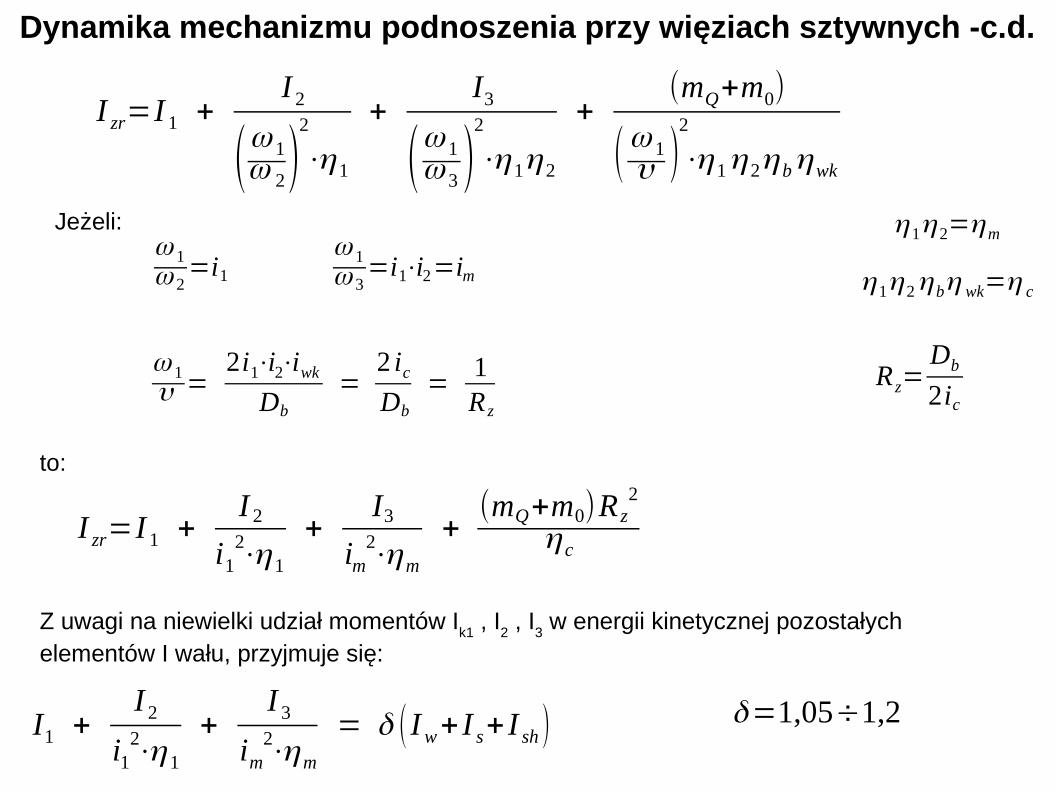
I zr=I 1 +I 2
(ω 1ω 2)
2
⋅η1
+I3
(ω 1ω 3 )
2
⋅η1η2
+(mQ+m0)
(ω 1υ )
2
⋅η1η2ηbηwk
ω 1ω 2
=i1
Jeżeli:ω 1ω 3
=i1⋅i2=im
η1η2=ηm
η1η2ηbη wk=η c
ω 1υ =
2i1⋅i2⋅iwk
Db
=2 ic
Db
= 1R z
R z=Db
2ic
I zr=I 1 +I 2
i12⋅η1
+I3
im2⋅ηm
+(mQ+m0)R z
2
η c
to:
Z uwagi na niewielki udział momentów Ik1
, I2 , I
3 w energii kinetycznej pozostałych
elementów I wału, przyjmuje się:
I1 +I 2
i12⋅η1
+I 3
im2⋅ηm
= δ ( Iw+ I s+ I sh ) δ=1,05÷1,2
Dynamika mechanizmu podnoszenia przy więziach sztywnych -c.d.
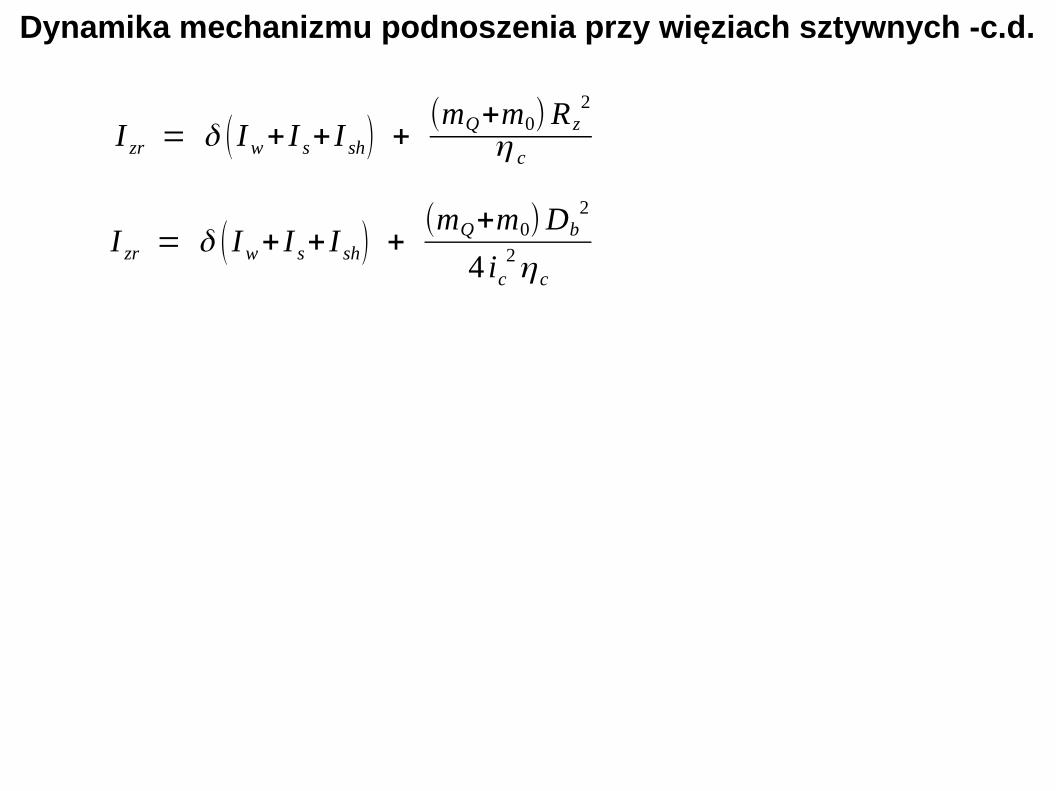
I zr = δ ( Iw+ I s+ I sh) +(mQ+m0) R z
2
η c
I zr = δ ( Iw+ I s+ I sh) +(mQ+m0) Db
2
4 ic2η c
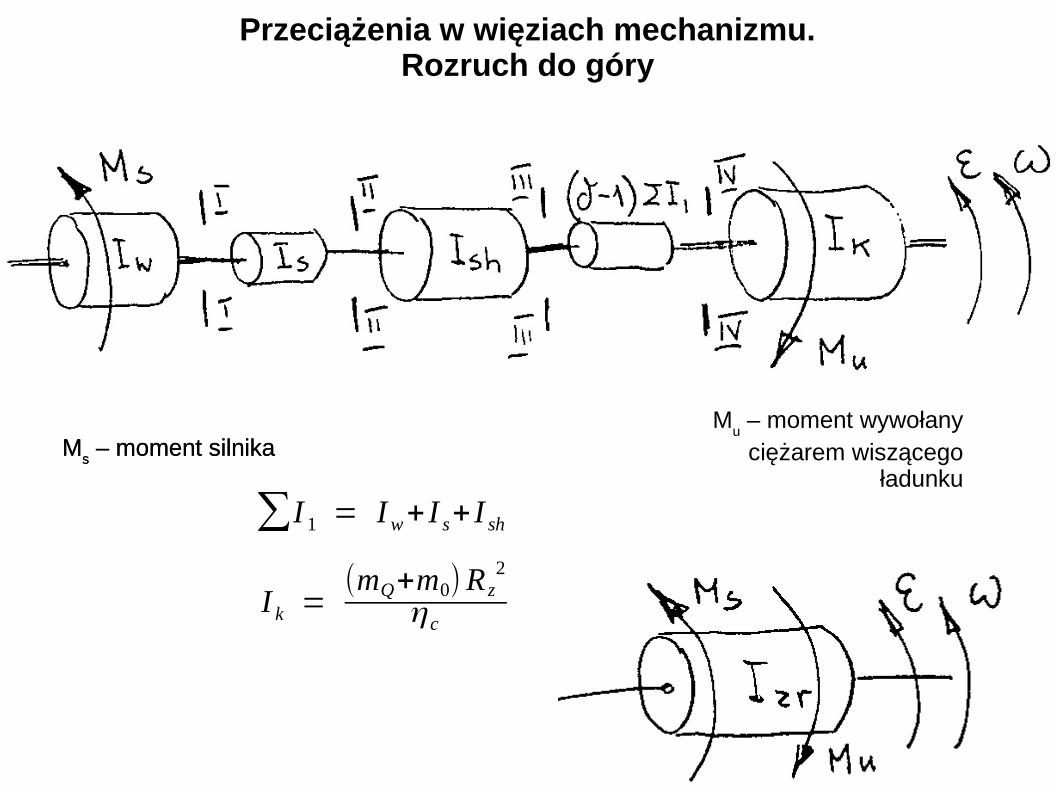
Przeciążenia w więziach mechanizmu.Rozruch do góry
∑I 1 = Iw+ I s+ I sh
Ms – moment silnikaM
s – moment silnika
Mu – moment wywołany ciężarem wiszącego
ładunku
I k =(mQ+m0) R z
2
η c
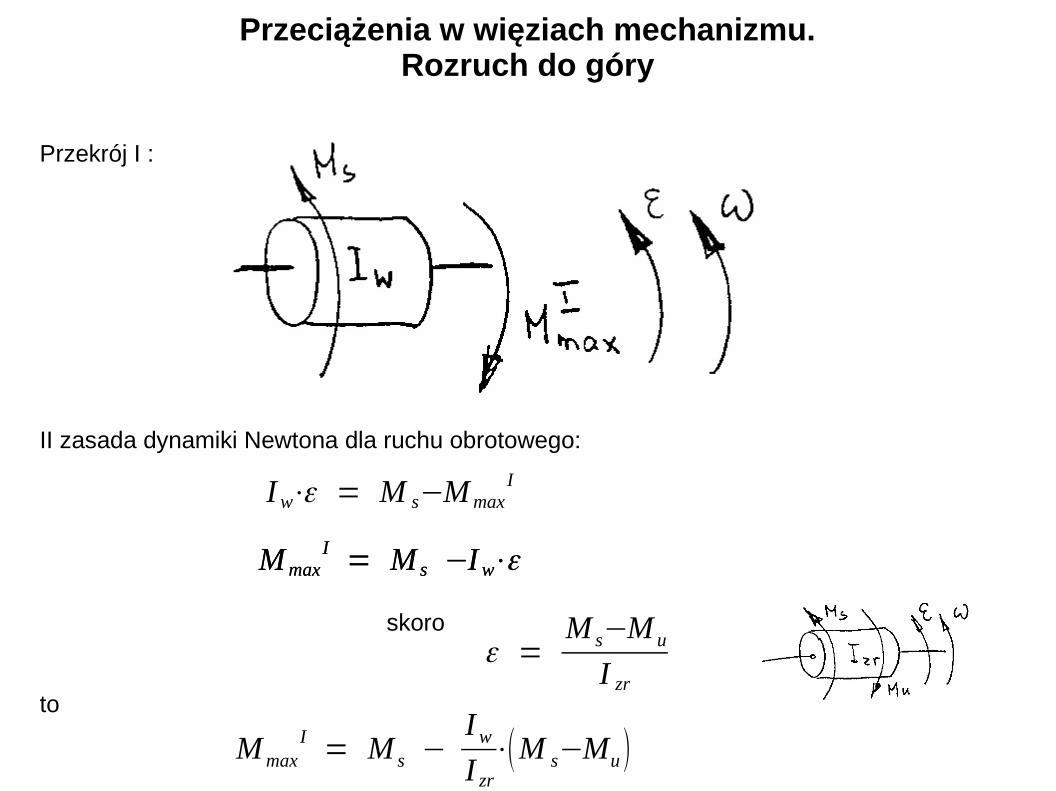
Przeciążenia w więziach mechanizmu.Rozruch do góry
Iw⋅ε = M s−MmaxI
II zasada dynamiki Newtona dla ruchu obrotowego:
Przekrój I :
MmaxI = M s −Iw⋅ε
skoro
MmaxI = M s −Iw⋅ε
ε =M s−M u
I zrto
MmaxI = M s −
Iw
I zr
⋅(M s−Mu)
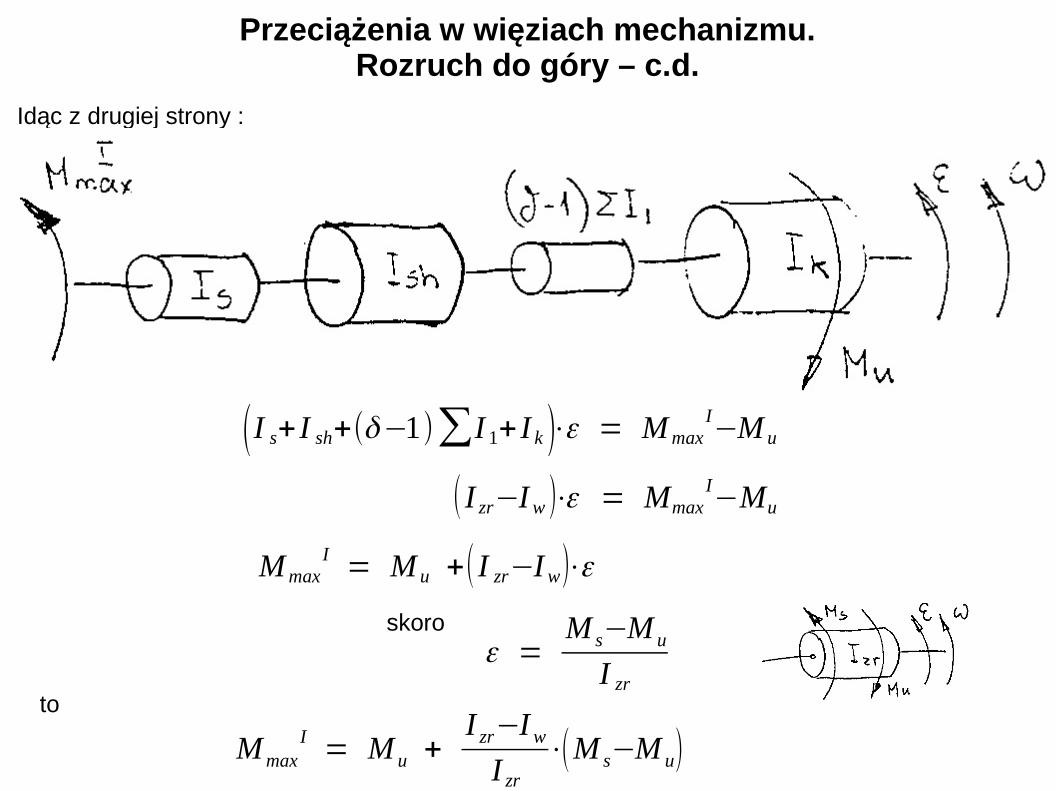
Przeciążenia w więziach mechanizmu.Rozruch do góry – c.d.
(I s+ I sh+(δ−1)∑I 1+ I k )⋅ε = MmaxI−M u
Idąc z drugiej strony :
skoro
MmaxI = M u +( I zr−Iw)⋅ε
ε =M s−M u
I zrto
MmaxI = M u +
I zr−Iw
I zr
⋅(M s−M u)
( I zr−Iw )⋅ε = MmaxI−Mu
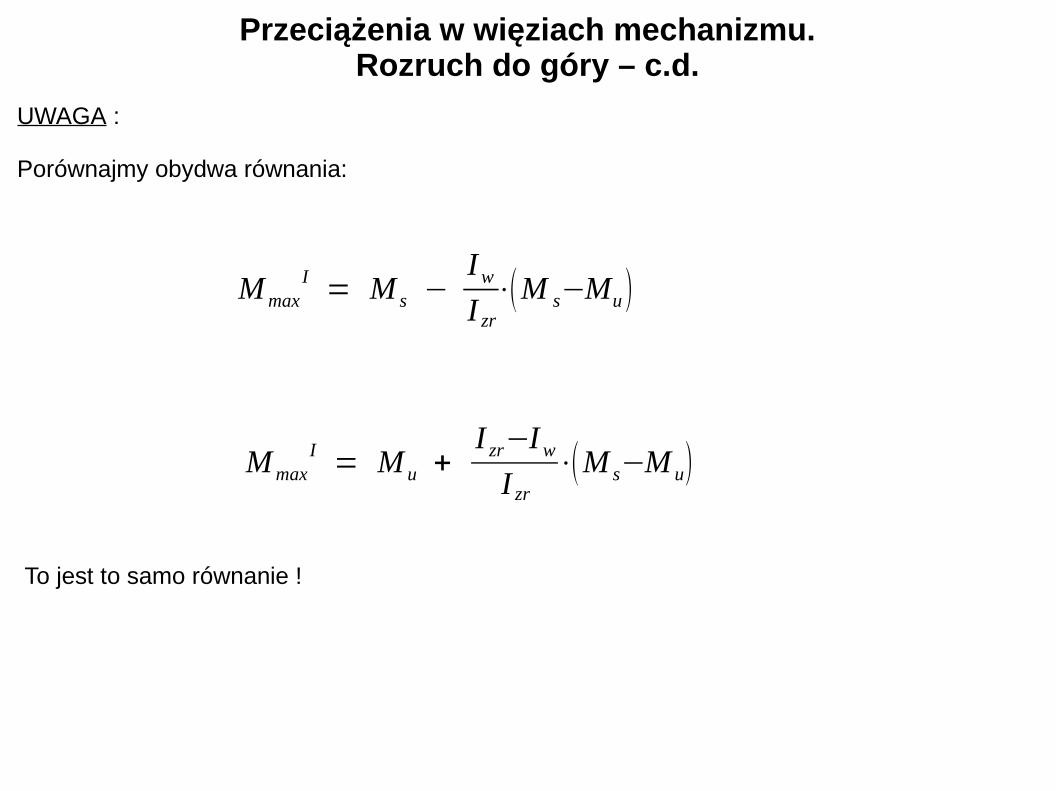
Przeciążenia w więziach mechanizmu.Rozruch do góry – c.d.
UWAGA :
Porównajmy obydwa równania:
To jest to samo równanie !
MmaxI = M u +
I zr−Iw
I zr
⋅(M s−M u)
MmaxI = M s −
Iw
I zr
⋅(M s−Mu)
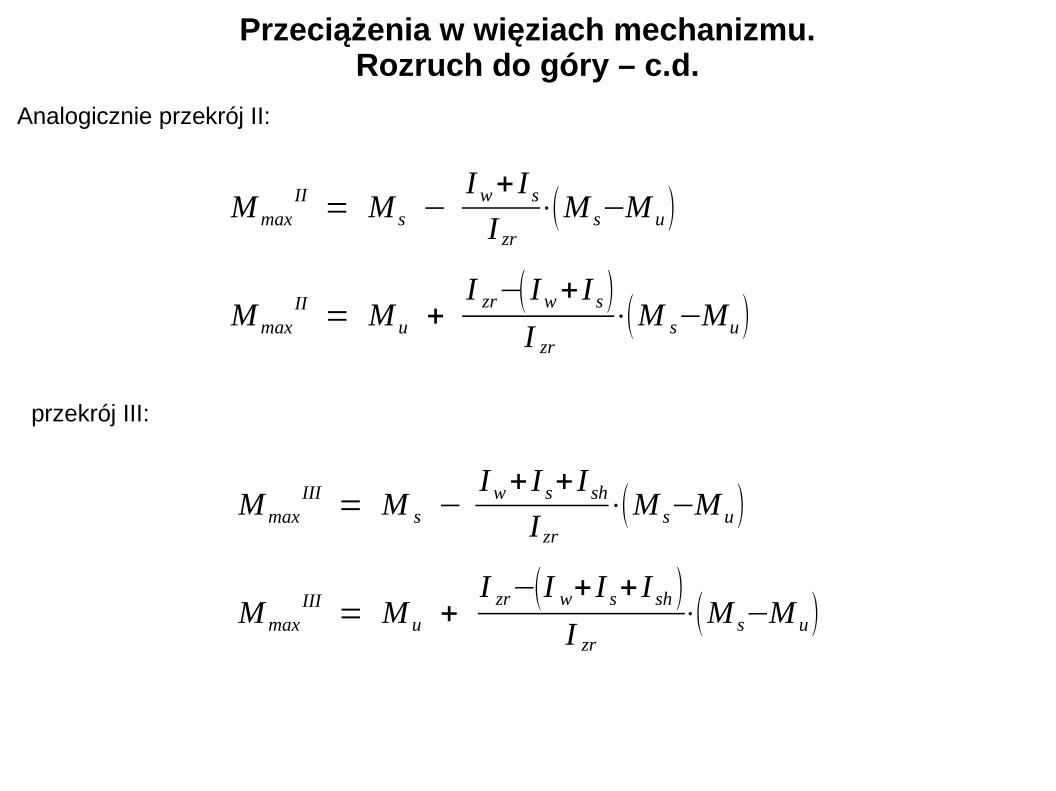
Przeciążenia w więziach mechanizmu.Rozruch do góry – c.d.
Analogicznie przekrój II:
MmaxII = M u +
I zr−( Iw+ I s )I zr
⋅(M s−Mu)
MmaxII = M s −
Iw+ I s
I zr
⋅(M s−M u)
przekrój III:
MmaxIII = M u +
I zr−(I w+ I s+ I sh )I zr
⋅(M s−M u)
MmaxIII = M s −
Iw+ I s+ I sh
I zr
⋅(M s−M u )
Przeciążenia w więziach mechanizmu.Rozruch do góry – c.d.
przekrój IV:
MmaxIV = M u +
I k
I zr
⋅(M s−M u)
MmaxIV = M s −
δ (I w+ I s+ I sh)I zr
⋅(M s−M u)
Moment Mmax
IV odpowiada sile w linach Pmax
.
Pmax = MmaxIV η c
R z
ponieważ:
Pmax⋅υ = MmaxIV⋅ω 1⋅η c
R z=Db
2ic
υ = ω 1⋅R z
Przeciążenia w więziach mechanizmu.Rozruch do góry – c.d.
Pmax = (mQ+m0)⋅(g+ar) a
P
ar =(M s−M u) R z
I zr
=(M s−M u) Db
2 I zr ic
Siła na haku:
Pmaxh = mQ⋅(g+ar)
Przeciążenia w więziach mechanizmu.Hamowanie
Zakładamy przepływ mocy od człona końcowego do I wału.Określa się pracę wykonaną na I wale potrzebną do odebrania od układu energii kinetycznej.
Ekh=12
I 1ω 12 + 1
2I 2ω 2
2⋅η1h + 12
I 3ω 32⋅η1h⋅η2h +
(mQ+m0)⋅υ2
2⋅η1h⋅η2h⋅ηbh⋅η wkh
Ekh=12
I zhω 12
Wprowadza się pojęcie zastępczego momentu bezwładności mechanizmu przy hamowaniu Izh
zredukowanego na I wał.
Po porównaniu prawych stron i podzieleniu ich przez 12ω 1
2 :
I zh=I 1 +I 2
(ω 1ω 2 )
2 η1h +I 3
(ω 1ω 3 )
2 η1hη2h +(mQ+m0)
(ω 1υ )
2 η1hη2hηbhηwkh
ω 1ω 2
=i1
Jeżeli:ω 1ω 3
=i1⋅i2=im
η1hη 2h=η mh
η1hη2hη bhηwkh=η ch
ω 1υ =
2i1⋅i2⋅iwk
Db
=2 ic
Db
= 1R z
R z=Db
2ic
I zh=I 1 +I 2
i12η 1h +
I3
im2 η mh + (mQ+m0)R z
2η ch
to:
Z uwagi na niewielki udział momentów Ik1
, I2 , I
3 w energii kinetycznej pozostałych
elementów I wału, przyjmuje się:
I1 +I2
i12 η1h +
I 3
im2 ηmh = δ ( Iw+ I s+ I sh) δ=1,05÷1,2
Przeciążenia w więziach mechanizmu.Hamowanie – c.d.
I zh = δ ( Iw+ I s+ I sh) + (mQ+m0)R z2η ch
I zh = δ ( Iw+ I s+ I sh) +(mQ+m0) Db
2
4 ic2 η ch
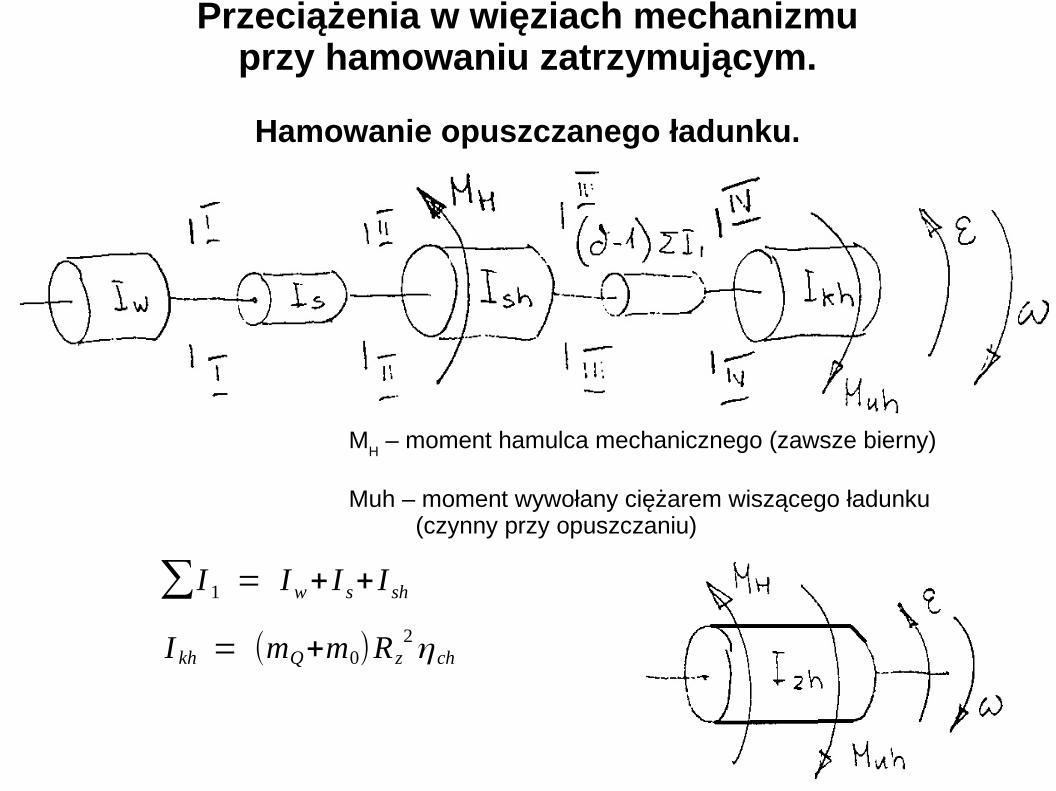
Przeciążenia w więziach mechanizmuprzy hamowaniu zatrzymującym.
Hamowanie opuszczanego ładunku.
MH – moment hamulca mechanicznego (zawsze bierny)
Muh – moment wywołany ciężarem wiszącego ładunku (czynny przy opuszczaniu)
∑I 1 = Iw+ I s+ I sh
I kh = (mQ+m0)R z2η ch
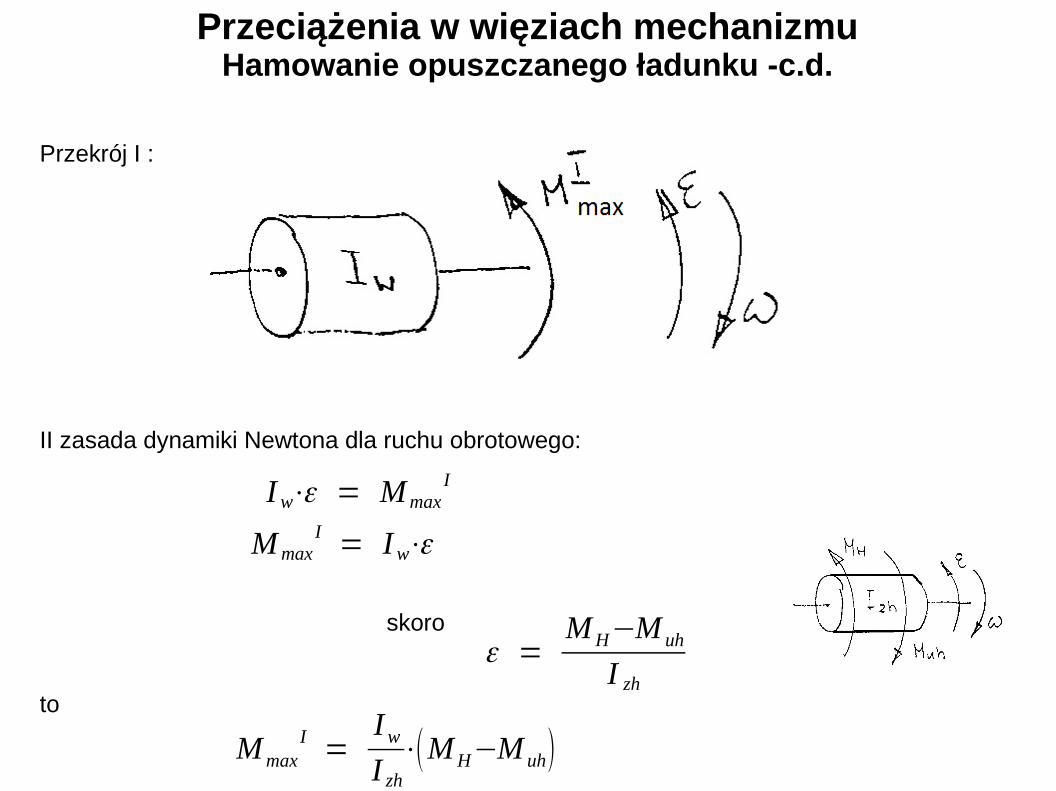
Przeciążenia w więziach mechanizmuHamowanie opuszczanego ładunku -c.d.
Iw⋅ε = MmaxI
II zasada dynamiki Newtona dla ruchu obrotowego:
Przekrój I :
skoro
MmaxI = Iw⋅ε
ε =MH−M uh
I zhto
MmaxI =
Iw
I zh
⋅(MH−M uh)
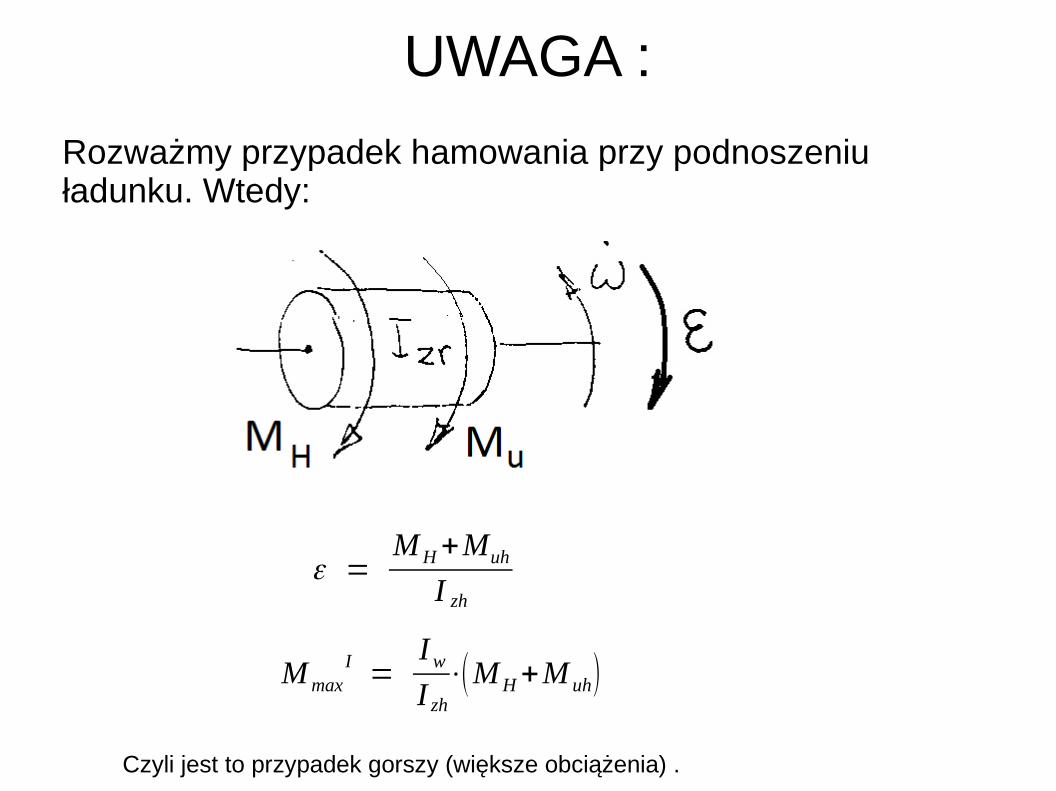
UWAGA :
Rozważmy przypadek hamowania przy podnoszeniu ładunku. Wtedy:
ε =MH +Muh
I zh
MmaxI =
Iw
I zh
⋅(MH +M uh)
Czyli jest to przypadek gorszy (większe obciążenia) .
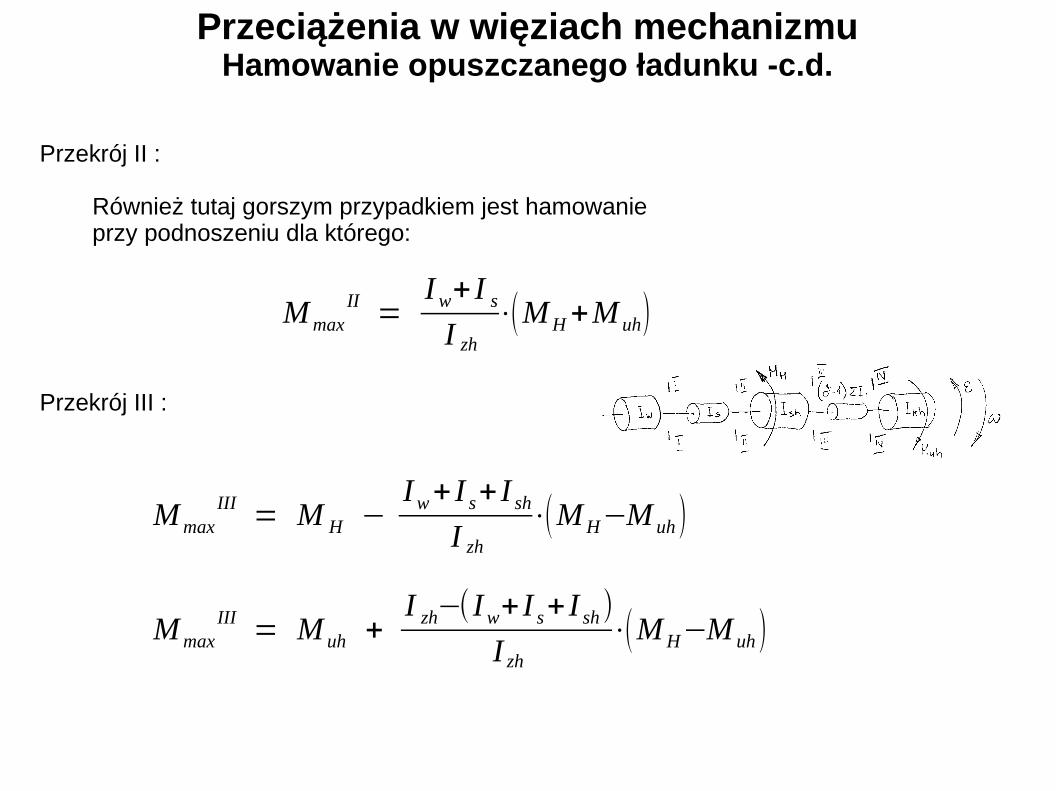
Przeciążenia w więziach mechanizmuHamowanie opuszczanego ładunku -c.d.
Przekrój II :
Również tutaj gorszym przypadkiem jest hamowanie przy podnoszeniu dla którego:
MmaxII =
Iw+ I s
I zh
⋅(MH +M uh)
Przekrój III :
MmaxIII = M H −
Iw+ I s+ I sh
I zh
⋅(MH−M uh )
MmaxIII = M uh +
I zh−(Iw+ I s+ I sh)I zh
⋅(MH−M uh )
Przeciążenia w więziach mechanizmuHamowanie opuszczanego ładunku -c.d.
Przekrój IV :
MmaxIV = M H −
δ (I w+ I s+ I sh)I zh
⋅(MH−M uh)
MmaxIV = M uh +
I kh
I zh
⋅(MH−M uh)Moment M
maxIV odpowiada sile w linach P
max.
Pmax = MmaxIV 1
R zη ch
ponieważ:
Pmax⋅υ⋅η ch = MmaxIV⋅ω 1
R z=Db
2ic
υ = ω 1⋅R z
Pmax = (mQ+m0)⋅(g+ah) ah
P
ah =(MH−M uh)R z
I zh
=(MH−M uh) Db
2 I zh ic
Siła na haku:
Pmaxh = mQ⋅(g+ah)
Przeciążenia w więziach mechanizmuHamowanie opuszczanego ładunku -c.d.