Podstawy budowy i eksploatacji pojazdów - uwm.edu.pl · Podstawy budowy i eksploatacji pojazdów i...
362
Podstawy budowy i eksploatacji pojazdów i maszyn Olsztyn 2013 Jerzy Napiórkowski, Przemysław Drożyner, Paweł Mikołajczak, Arkadiusz Rychlik, Piotr Szczyglak, Krzysztof Ligier
Transcript of Podstawy budowy i eksploatacji pojazdów - uwm.edu.pl · Podstawy budowy i eksploatacji pojazdów i...

Publikacja współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
KAPITAŁ LUDZKI
Podstawybudowyi eksploatacjipojazdówi maszyn
Pod
stawy bu
do
wy i eksplo
atacji pojazd
ów
i maszyn
Olsztyn 2013
Jerzy Napiórkowski,Przemysław Drożyner,Paweł Mikołajczak,Arkadiusz Rychlik,Piotr Szczyglak,Krzysztof Ligier
ISBN 978-83-63041-97-7

Podstawy budowy i eksploatacji pojazdów i maszyn

Projekt pn.
Wzmocnienie potencjału dydaktycznego UWM w Olsztynie
Publikacja współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
Człowiek – najlepsza inwestycja
Publikacja bezpłatna

Podstawy budowy i eksploatacji
pojazdów i maszyn
Uniwersytet Warmińsko-Mazurskiw Olsztynie
Jerzy Napiórkowski, Przemysław Drożyner, Paweł Mikołajczak, Arkadiusz Rychlik, Piotr Szczyglak, Krzysztof Ligier
Olsztyn 2013

Wydawca:EXPOL, P. Rybiński, J. Dąbek, sp.j.
Zespół autorów:Jerzy Napiórkowski – rozdz. 3 i 4Przemysław Drożyner – rozdz. 2, 6, 9, 10Paweł Mikołajczak – rozdz. 10.3, 1Arkadiusz Rychlik – rozdz. 1Pior Szczyglak – rozdz. 5Krzysztof Ligier – rozdz. 2.4, 8, 10.4
Recenzent:prof. dr. hab. inż. Bogdan Żółtowski prof. zw.
© Uniwersytet Warmińsko-Mazurski w Olsztynie, 2013
Projekt okładki: Magdalena SakwaŁamanie tekstów: Joanna Podgórska
Skład, druk i oprawa:
EXPOL, P. Rybiński, J. Dąbek, sp.j.ul. Brzeska 4, 87-800 Włocławektel. 54 232 37 23, e-mail: [email protected]
ISBN 978-83-63041-97-7

5
Spis treści
Wprowadzenie .............................................................................................................. 9
1. PoDStAWy MASZyNoZNAWStWA ................................................. 13 1.1. Połączenia nierozłączne i rozłączne ............................................... 13 1.1.1. Połączenia spawane ..................................................................... 13 1.1.2. Połączenia lutowane/klejone ...................................................... 15 1.1.3. Połączenia zgrzewane .................................................................. 17 1.1.4. Połączenia wtłaczane/skurczowe ............................................... 18 1.1.5. Połączenia nitowane .................................................................... 19 1.1.6. Połączenia klinowe ...................................................................... 20 1.1.7. Połączenia wpustowe i wielowypustowe ................................... 20 1.1.8. Połączenia sworzniowe ............................................................... 22 1.1.9. Połączenia kołkowe ..................................................................... 22 1.1.10. Połączenia gwintowe ................................................................... 23 1.1.11. Połączenia rurowe ........................................................................ 25 1.2. Wały i osie ........................................................................................ 26 1.3. Przekładnie ...................................................................................... 28 1.3.1. Przekładnie cierne ....................................................................... 28 1.3.2. Przekładnie cięgnowe .................................................................. 28 1.3.3. Przekładnie zębate ....................................................................... 30 1.4. Sprzęgła ........................................................................................... 31 1.5. Hamulce ........................................................................................... 36 1.6. Łożyska ............................................................................................ 37 1.7. Układy hydrauliczne ....................................................................... 41 1.8. Układy pneumatyczne ..................................................................... 46 1.9. Silniki cieplne .................................................................................. 47 1.10. Pompy .............................................................................................. 51 1.11. Sprężarki i wentylatory ................................................................... 52 1.12. Silnik elektryczny ............................................................................ 54 1.13. Budowa pojazdu samochodowego .................................................. 57 1.14. Charakterystyka materiałów konstrukcyjnych .............................. 68Literatura ......................................................................................................... 75
2. PoDStAWy EKSPLoAtACJI MASZyN I URZĄDZEŃ ....................... 77 2.1. Definicja eksploatacji ...................................................................... 77

6
2.2. Budowa systemu eksploatacji .......................................................... 81 2.3. Zarządzanie eksploatacją w zakładach – funkcje ........................... 87 2.4. Charakterystyka procesu użytkowania i obsługiwania .................. 90 2.4.1. Charakterystyka procesu użytkowania ..................................... 90 2.4.2. Charakterystyka procesu obsługiwania .................................... 92 2.5. Dobre praktyki eksploatacyjne ....................................................... 95Literatura ......................................................................................................... 97
3. tRWAŁoŚĆ I NIEZAWoDNoŚĆ .......................................................... 99 3.1. Podstawowe pojęcia ......................................................................... 99 3.2. Rodzaje uszkodzeń ........................................................................ 102 3.3. Wskaźniki niezawodności ............................................................. 105 3.4. Niezawodność obiektów nieodnawialnych ................................... 107 3.5. Niezawodność obiektów odnawialnych ........................................ 110 3.6. Niezawodność układów złożonych ............................................... 115 3.7. Metody zwiększania niezawodności ............................................. 119Literatura ....................................................................................................... 122
4. PoDStAWy PRoCESÓW ZUŻyCIoWyCH ...................................... 123 4.1. Podstawowe pojęcia z tribologii ................................................... 123 4.2. Charakterystyka warstwy wierzchniej .......................................... 132 4.3. Procesy zużycia .............................................................................. 145 4.4. Charakterystyka procesów zużywania .......................................... 148Literatura ....................................................................................................... 162
5. MAtERIAŁy EKSPLoAtACyJNE ....................................................... 163 5.1. Paliwa ............................................................................................. 163 5.2. Środki smarne ............................................................................... 175 5.3. Płyny do układów chłodzenia ....................................................... 186 5.4. Płyny do układów hamulcowych .................................................. 187 5.5. opony pneumatyczne ................................................................... 187Literatura ....................................................................................................... 190
6. DIAGNoZoWANIE StANU tECHNICZNEGo MASZyN I URZĄDZEŃ ....................................................................... 191 6.1. Informacje wstępne ....................................................................... 191 6.2. Ważniejsze metody badań stanu maszyn ...................................... 196 6.2.1. Metody wizualne ........................................................................ 196

7
6.2.2. Metody penetracyjne ................................................................. 199 6.2.3. Metody magnetyczno-proszkowe ............................................ 199 6.2.4. Metody radiacyjne ..................................................................... 199 6.2.5. Metody ultradźwiękowe ............................................................ 199 6.2.6. Diagnostyka termograficzna .................................................... 200 6.2.7. Badania produktów zużycia ..................................................... 201 6.2.8. Diagnostyka wibroakustyczna (WA) ....................................... 202Literatura ....................................................................................................... 207
7. tECHNoLoGIA NAPRAW ................................................................. 209 7.1. Wprowadzenie i podstawowe definicje ......................................... 209 7.2. Proces technologiczny naprawy .................................................... 214 7.2.1. Przyjęcie do naprawy ................................................................. 219 7.2.2. Przechowywanie ........................................................................ 219 7.2.3. Czyszczenie i mycie zewnętrzne .............................................. 220 7.2.4. Demontaż .................................................................................... 222 7.2.5. Mycie i czyszczenie części ......................................................... 223 7.2.6. Weryfikacja części ...................................................................... 230 7.2.7. Regeneracja części ..................................................................... 232 7.2.8. Montaż ........................................................................................ 239 7.2.9. Badania oraz odbiór maszyn i urządzeń po naprawie .......... 239Literatura ....................................................................................................... 240
8. LoGIStyKA W UtRZyMANIU MASZyN ........................................ 241 8.1. Definicja logistyki ......................................................................... 241 8.2. Logistyka części zamiennych ........................................................ 241 8.3. Klasyfikacja części zamiennych i materiałów eksploatacyjnych w aspekcie logistyki ....................................................................... 245 8.4. Podstawy sterowania zapasami ..................................................... 250 8.4.1. Struktura zapasów ..................................................................... 250 8.4.2. Koszty zapasów .......................................................................... 251 8.4.3. Podstawowe modele sterowania zapasami ............................. 253 8.5. Podstawowe techniki zarządzania łańcuchem dostaw części zamiennych i materiałów eksploatacyjnych ................................. 261 8.6. Podsumowanie .............................................................................. 264Literatura ....................................................................................................... 264

9. BEZPIECZEŃStWo tECHNICZNE ................................................... 265 9.1. Podstawowe pojęcia ....................................................................... 265 9.2. Analiza ryzyka w procesie eksploatacji obiektów technicznych .. 269 9.3. Aspekty prawne i normatywne w budowie i eksploatacji maszyn i urządzeń ...................................................................................... 284 9.3.1. Wprowadzanie na rynek wyrobów nowych ........................... 284 9.3.2. Eksploatacja i utrzymanie bezpieczeństwa ............................. 290Literatura ....................................................................................................... 297
10. ZARZĄDZANIE EKSPLoAtACJĄ ...................................................... 299 10.1. Strategie eksploatacji maszyn i urządzeń ..................................... 299 10.1.1. Strategia do uszkodzenia (wg niezawodności) ...................... 301 10.1.2. Strategia planowo-zapobiegawcza (wg ilości wykonanej pracy) ..................................................... 301 10.1.3. Strategia wg stanu technicznego .............................................. 302 10.1.4. Strategia wg efektywności ekonomicznej ............................... 302 10.1.5. Autoryzowana strategia obsługi ............................................... 303 10.1.6. Holistyczne strategie eksploatacji (przykłady) ....................... 303 10.1.7. Wybór strategii eksploatacji ..................................................... 309 10.2. Efektywność eksploatacji .............................................................. 310 10.2.1. Wskaźniki efektywności ........................................................... 310 10.2.2. Ocena efektywności eksploatacji wg metody OEE (Overall Equipment Effectivness) ............................................ 311 10.2.3. Pomiary efektywności eksploatacji wg standardu „Maintenance – Key Performance Indicator” ........................ 313 10.3. Zarządzanie eksploatacją – Narzędzia wspierające procesy podejmowania decyzji eksploatacyjnych ...................................... 318 10.3.1. Statystyczna kontrola procesów ............................................... 320 10.3.2. Narzędzia heurystyczne ............................................................ 339 10.3.3. Narzędzia matematyczne .......................................................... 343 10.4. Systemy informatyczne wspomagające utrzymanie maszyn i urządzeń ...................................................................................... 351 10.4.1. Klasyfikacja systemów informatycznych zarządzania ........... 352 10.4.2. Systemy CMMS – podstawowe informacje ............................ 353 10.4.3. Podstawowe funkcje systemów CMMS .................................. 354 10.4.4. Czy wprowadzanie systemu CMMS jest konieczne? ............ 358 10.4.5. Podsumowanie ........................................................................... 359Literatura ....................................................................................................... 360

9
Wprowadzenie
Podstawowym zadaniem procesów przemysłowych jest produkcja, która polega na przetwarzaniu dóbr przyrody w celu zaspokojenia potrzeb społeczeń-stwa. Produkcja odbywa się w przedsiębiorstwie, które, wykorzystując środki pro-dukcji, posiadane technologie oraz odpowiednią kadrę, dokonuje przetworzenia zasobów na finalny produkt. Celem tych działań jest zaspokojenie potrzeb zwią-zanych z życiem i rozwojem społeczeństwa. Wytyczne do projektowania, kon-strukcji i wytwarzania maszyn płyną głównie z zapotrzebowania szeroko rozu-mianego rynku oraz walorów eksploatacyjnych produktu. W cyklu życia maszyn czy, ujmując szerzej, obiektów technicznych, najczęściej wyróżnia się pięć faz ich istnienia. Chronologicznie są to: wartościowanie (generowanie potrzeby), kon-struowanie, wytwarzanie, eksploatacja i likwidacja. W praktyce stosowanych jest wiele definicji maszyny czy też obiektu technicznego, których treści wraz ze zmianą gałęzi przemysłu mogą przybierać różne postacie. Ujednoliconą defini-cję maszyny wprowadziła unijna DYREKTYWA MASZYNOWA 2006/42/WE, w której za maszynę uważa się „zbiór powiązanych ze sobą części lub zespołów, z których przynajmniej jedna(en) jest ruchoma(y), wraz z odpowiednimi elemen-tami funkcjonalnymi, układami sterowania i zasilania zespolonymi w celu okre-ślonego zastosowania, w szczególności do przetwarzania, obrabiania, przemiesz-czania i pakowania materiałów, do napędu której wykorzystano bezpośrednio inne źródło energii niż siłę mięśni ludzkich lub zwierzęcych”.
W praktyce wyróżnia się następujący podział maszyn na:• technologiczne – wykorzystuje się je do przetwarzania surowców i półwyro-
bów poprzez zmianę kształtu, objętości, własności fizycznych lub chemicz-nych i wytworzenia w ten sposób gotowego wyrobu, np.: maszyny stolarskie, do obróbki metali, itd.,
• transportowe – służą do zmiany położenia ciał stałych, cieczy i gazów. Maszyny transportowe dzielimy na:– maszyny o zasięgu nieograniczonym,– maszyny o zasięgu ograniczonym.Do maszyn o zasięgu nieograniczonym zaliczamy pojazdy szynowe, pojazdy samochodowe, okręty, samoloty. Maszyny o zasięgu ograniczonym to dźwigi, przenośniki, podnośniki, windy,
• energetyczne – wytwarzają z energii mechanicznej inne rodzaje energii, np.: prądnice, maszyny elektryczne, silniki itp.,
• informatyczne – maszyny kontrolno-sterujące oraz matematyczne; przetwa-rzają informacje, które na podstawie żądanego algorytmu dokonują niezbęd-nych operacji matematycznych,

10
• cybernetyczne – funkcjonują w oparciu o sztuczną inteligencję, np. roboty, zespoły nawigacji.Opracowanie stanowi podstawowy materiał do studiów przedmiotów: pod-
stawy budowy i eksploatacji maszyn, niezawodność i bezpieczeństwo oraz utrzy-manie ruchu na kierunku zarządzanie i inżynieria produkcji na pierwszym stop-niu studiów. Jako uzupełniające może być także wykorzystane przez studentów techniki rolniczej i leśnej, mechaniki i budowy maszyn oraz inżynierii bezpieczeń-stwa. Autorzy mieli świadomość, że dla wielu studentów będzie to pierwszy kon-takt z zagadnieniami technicznymi, w tym również terminologią techniczną. Stąd przy pisaniu zwrócono szczególną uwagę na stopniowe wdrażanie w zagadnienia podstawowych pojęć, zasad funkcjonowania podstawowych mechanizmów oraz podstaw eksploatacji. Przedstawione treści są próbą zgromadzenia i wyjaśnienia w możliwie prosty sposób pewnych zasad, metod i wytycznych postępowania – w obszarze maszynoznawstwa, materiałów konstrukcyjnych oraz racjonalnej i bezpiecznej eksploatacji maszyn.
Głównym zadaniem opracowania jest wykształcenie w studentach wiedzy i umiejętności w zakresie: interpretowania podstawowych pojęć z zakresu maszy-noznawstwa, rozróżniania i oceny własności tworzyw konstrukcyjnych oraz eks-ploatacji obiektów technicznych. W podręczniku wyróżnić można dwa podsta-wowe aspekty działalności w inżynierii: maszynoznawstwo z materiałami kon-strukcyjnymi oraz eksploatację maszyn.
Maszynoznawstwo jest jedną z podstawowych dziedzin wiedzy, nauką o budo-wie i zasadach funkcjonowania mechanizmów. Przez mechanizm rozumiemy układ połączonych ze sobą części maszyn mogących wykonywać określony ruch w wyniku przetwarzania energii mechanicznej. Encyklopedyczna wiedza przed-stawiona w tym rozdziale obejmuje charakterystykę rodzajów połączeń, podsta-wowych elementów konstrukcyjnych takich, jak: wały i osie, przekładnie i sprzę-gła, hamulce i łożyska. W dalszej kolejności opisano układy hydrauliczne, silniki cieplne, pompy, sprężarki i wentylatory, silniki elektryczne oraz budowę klasycz-nego pojazdu samochodowego. Zwieńczeniem tego rozdziału są podstawowe charakterystyki materiałów tradycyjnych i tworzyw perspektywicznych w zakre-sie, który w zasadzie odpowiada prowadzonym zajęciom z procesów degradacji na kierunku inżynierskim w dziedzinie zarządzania i inżynierii produkcji. Jest to materiał pomocniczy w stosunku do obszernej literatury naukowej z dyscy-plin wchodzących w skład tego przedmiotu (metaloznawstwo, nauki o polime-rach, nanomateriałach, napoinach, materiałach ceramicznych oraz kompozytach itd.). Ma on ułatwić studentom opanowanie podstawowych informacji praktycznych z tego zakresu i nauczyć porównywania niektórych właściwości podstawowych materiałów konstrukcyjnych.
Zdecydowana większość opracowania wypełniona jest treścią związaną z zagadnieniami eksploatacji maszyn. Pojęcie eksploatacji jest zagadnieniem

11
interdyscyplinarnym. Obejmuje ono organizacyjne, techniczne, ekologiczne, eko-nomiczne i społeczne zagadnienia związane z działaniem ludzi i maszyn.
W ujęciu inżynierskim eksploatacja to zespół czynności obejmujących plano-wanie, użytkowanie, obsługiwanie, diagnozowanie, przechowywanie i inne przed-sięwzięcia mające na celu użyteczne i bezpieczne wykorzystanie maszyn. Podsta-wowe w eksploatacji są zagadnienia degradacji i niezawodności maszyn, które można kształtować poprzez poznanie mechanizmów ich powstawania i przeciw-działanie na etapie konstruowania, produkcji i eksploatacji. Zakres przedstawio-nej w opracowaniu wiedzy obejmuje charakterystykę:• podstawowychpojęćdotyczącycheksploatacjimaszyn,• podstaweksploatacjimaszynwujęciusystemowymtypowychpodsystemów
eksploatacji,• metodbadaniaiocenyniezawodności,jakościitrwałościmaszyn,• zasadanalizydanycheksploatacyjnych,• warstwywierzchniej,przyczynuszkodzeńorazprocesówzużyciowych,• materiałóweksploatacyjnych,• metoddiagnozowaniairozpoznawaniastanutechnicznegomaszyn,• organizacji procesów obsługowych, procesów technologicznych napraw
i regeneracji,• działańlogistycznych,wtymplanowaniazasobówczęścizamiennych,• zagadnieńbezpieczeństwamaszyn,• strategiieksploatacji,zarządzaniaeksploatacjąiocenyjejefektywności.
Autorzy są świadomi kompromisu między formą, treścią i terminologią, jaki trzeba było zawrzeć przy tworzeniu tego opracowania. Kompromisu, który był niezbędny, aby w stosunkowo łatwy i przystępny sposób przekazać często trudne i skomplikowane zagadnienia i problemy techniczne. Dlatego też Autorzy będą wdzięczni za wszelkie uwagi, które pozwolą udoskonalić treść przedstawionego materiału w następnych wydaniach.
Jerzy Napiórkowski

Niniejsza publikacja została przygotowana i wydana w ramach projektu pn. Wzmocnienie potencjału dydaktycznego UWM w Olsztynie
współfinansowanego ze środków Europejskiego Funduszu Społecznego w ramach Programu Operacyjnego Kapitał Ludzki,
realizowanego przez Uniwersytet Warmińsko-Mazurski w Olsztynie.
Prezentowane opracowanie zostało przygotowane w celu realizacji zajęć na nowym kierunku studiów Zarządzanie i Inżynieria Produkcji,
specjalność Zarządzanie innowacjami, utworzonym w ramach ww. projektu na Wydziale Nauk Ekonomicznych

13
1. Podstawy maszynoznawstwa
1.1. Połączenia nierozłączne i rozłączne
Każda maszyna, urządzenie lub mechanizm składa się z pewnej ściśle określo-nej liczby części składowych, które nazywamy częściami lub elementami maszyn. Wśród tych części składowych wyróżnić możemy całe grupy elementów, które stanowią zespoły połączeń, łożyskowań oraz napędów maszyn [6].
Połączenia części maszyn dzielimy na nierozłączne, w których części złączone lub łączone (łączniki) ulegają uszkodzeniu w wyniku rozłączenia, oraz rozłączne, które można rozłączyć i łączyć ponownie, bez uszkodzenia części łączonych i łączących.
Do połączeń nierozłącznych zaliczamy połączenia:• spawane,• lutowane,• klejone,• zgrzewane,• wtłaczane/skurczowe,• nitowane.
Z kolei do połączeń rozłącznych zaliczamy połączenia takie, jak:• klinowe,• wpustowe,• sworzniowe,• kołkowe,• gwintowane,• sprężyste,• rurowe.
1.1.1. Połączenia spawaneSpawaniem nazywany proces łączenia metali przez ich miejscowe stopienie
z dodawaniem lub bez dodawania spoiwa. Spawanie jest jednym z najczęściej sto-sowanych sposobów łączenia metali. Ze względu na swoje zalety (łatwość realiza-cji procesu, duża wytrzymałość, niskie koszty itd.) wypiera ono w szybkim tempie inne łączenie, np. za pomocą nitów, z wszelkiego rodzaju konstrukcji.
Rozróżnia się dwie metody spawania:– spawanie gazowe (w płomieniu gazowym – najczęściej acetylenowym –
o temperaturze płomienia do 3200°C), stosowane do łączenia blach stalo-wych o grubości 0,4÷40 mm,

14
– spawanie elektryczne (temp. 3500°C) stosowanie do łączenia materiałów o grubości do 80 mm.
W obu metodach spoiwem może być drut spawalniczy, który, w zależności od rodzaju spawania, zaopatrzony może być w specjalną otulinę (tzw. elektroda) lub gaz ochronny przeznaczony do ochrony wykonywanej spoiny.
Spawanie gazoweSpawanie gazowe jest najstarszą metodą spawalniczą i nazywane jest spa-
waniem autogenicznym. Materiał stapiany jest płomieniem palnika (rys. 1.1) Materiał dodatkowy (spoiwo) doprowadza się oddzielnie. Do zasilania palnika spawalniczego w gaz służą przewody giętkie podłączone do reduktorów ciśnie-nia, zamontowane na butlach wypełnionych acetylenem i tlenem. W palniku za pomocą zaworu, ustawia się mieszaninę gazową. Dyszę palnika dobiera się w zależności od grubości łączonych blach. Prawidłowo ustawiony palnik tworzy ostry stożek płomienia.
Rys. 1.1. Widok ogólny procesu spawania gazowego części.
Spawanie łukoweSpawanie łukowe w osłonie gazów ochronnych (rys. 1.2) – realizowane jest
za pomocą prądu elektrycznego wytwarzającego łuk elektryczny, który stapia materiał. Stapiająca się elektroda jest automatycznie podawana do miejsca spa-wania. Elektroda stanowi biegun dodatni, natomiast spawany przedmiot, rów-nież połączony przewodem ze spawarką, biegun ujemy. W celu polepszenia jako-ści przetopu i estetyki spoiny stosuje się gaz ochronny. Łuk elektryczny i ciekły metal chronione są przed tlenem w powietrzu przez doprowadzony gaz ochrony, np. CO2. Ta technika nazywa się spawaniem metali za pomocą gazu aktywnego metodą MAG, ponieważ gaz uczestniczy w procesie spawania.

15
Rys. 1.2. Spawanie łukowe metali w osłonie gazów ochronnych.
Do spawania stali szlachetnych, aluminium i materiałów miedzianych sto-sowany jest gaz ochronny w postaci argonu. Ta metoda nazywa się spawaniem metali w ochronie gazu obojętnego (metodą MIG).
Złącze spawane i spoinaSpoina łączy części metalowe, tworząc złącze spawane. Przykładowe kształty
spoiny oraz jej oznakowanie przedstawiono na rys. 1.3.
Rys. 1.3. Kształty spoin oraz ich oznakowanie.
1.1.2. Połączenia lutowane/klejone
Połączenie lutowane Połączenie lutowane jest bezpośrednim i nierozłącznym sposobem łączenia
elementów. Stopiony materiał dodatkowy (lut) łączy części pozostające w stanie stałym.
W praktyce stosuje się głównie lutowanie lutownicą wyposażoną w elektrycz-nie nagrzewany miedziany grot i lutowanie płomieniem, wykorzystujące płomień gazowy do rozgrzania łączonych elementów (rys. 1.4).

16
a) b)
Rys. 1.4. Lutowanie lutownicą (a) i lutowanie płomieniem (b).
Metody lutowania podzielone są wg temperatury lutu. Wyróżnia się:lutowanie miękkie – odbywa się w temperaturze do 450ºC za pomocą specjal-
nych lutów i topników (np. kalafonia), dając szczelne połączenie oraz złącze o właściwościach elektrycznego przewodzenia; tego rodzaju metoda lutowa-nia stosowana jest między innymi w elektrotechnice, instalacji rur miedzia-nych, blacharstwie itd.,
lutowanie twarde – realizowane jest w temperaturze powyżej 450ºC, gdzie przy użyciu odpowiednich lutów i topników (np. związki boru) uzyskuje się złą-czeń o podwyższonej wytrzymałości mechanicznej; lutowanie twarde znaj-duje zastosowanie w lutowaniu płytek węglików spiekanych w narzędziach skrawających, łączeniu stali i jej stopów z miedzią, niklem i stopami niklu dla połączeń o dużych wymaganiach wytrzymałościowych i trwałościowych narażonych na działanie wysokich temperatur.
Połączenia klejone Klejenie jest to połączenie metali za pomocą substancji zwanej klejem. Polega
ono na rozprowadzeniu cienkiej warstwy substancji klejącej na uprzednio przy-gotowanej powierzchni. Klejenie jest nowoczesną technologią łączenia elemen-tów maszyn. Rozwój tej technologii związany jest z produkcją nowych klejów o lepszych własnościach oraz z rozwojem badań wyjaśniających własności klejów i połączeń klejonych.
Głównym procesem klejenia jest oczyszczenie powierzchni metodami che-micznymi lub mechanicznymi. Powierzchnie łączone powinny być wolne od zanieczyszczeń i dokładnie rozwinięte, aby szczelnie do siebie przystawały. Złe oczyszczenie znacznie zmniejsza wytrzymałość połączenia. Powierzchnie łączone przygotowuje się najpierw mechanicznie, a następnie chemiczne. Przy-gotowanie mechaniczne ma na celu usunięcie zanieczyszczeń znajdujących się na powierzchni łączonych materiałów, jak na przykład rdzy. Przygotowanie che-

17
miczne polega na wytrawieniu/odtłuszczeniu powierzchni łączonych, aby zwięk-szyć zwilżalność łączonych materiałów.
Niektóre kleje są dwu lub więcej składnikowe, wówczas masę klejącą uzyskuje się przez wymieszanie ich w odpowiednich proporcjach. Z kolei w przypadku gdy mamy do czynienia z klejami termoutwardzalnymi, należy substancję ciekłą połączyć z utwardzaczem. Przygotowanie innych rodzajów klejów polega na roz-puszczeniu suchego kleju w rozpuszczalniku lub podgrzaniu go do temperatury, w której staje się ciekły.
Zalety połączeń klejonych: – wykorzystanie pełnej wytrzymałości materiałów łączonych, ponieważ
warstwa kleju nie wywołuje naprężeń w materiale i nie osłabia części łączonych,
– uzyskanie zestawu elementów o nienaruszonej powierzchni (bez otwo-rów),
– równomierne rozłożenie naprężeń na całej powierzchni złącza,– odporność połączeń na korozję,– zdolność tłumienia drgań,– szczelność złącza – klej odgrywa rolę uszczelki,– możliwość łączenia dowolnych materiałów.Wady połączeń klejonych:– możliwość rozwarstwienia połączenia pod wpływem obciążeń,– względnie mała odporność klejów na zmiany temperatury,– długi czas utwardzania większości klejów,– spadek wytrzymałości połączenia wraz z upływem czasu, spowodowany
starzeniem się kleju,– stosunkowo mała wytrzymałość w porównaniu z innymi rodzajami połą-
czeń nierozłącznych.
1.1.3. Połączenia zgrzewanePołączenia zgrzewane należą do grupy połączeń nierozłącznych i bezpośred-
nich. Zgrzewanie polega na doprowadzeniu łączonych fragmentów elementów do stanu plastyczności i ich mechanicznym dociśnięciu.
Ogólnie metody zgrzewania można podzielić na dwie grupy.Zgrzewanie punktowe (RP) (rys. 1.5a) charakteryzuje się tym, że elektrody
(1) do zgrzewania przenoszą prąd (4) (źródło ciepła) i siłę (docisk łączonych ele-mentów). Prąd elektryczny w miejscu oporu (styku dwóch metali) zamienia się w ciepło podgrzewające materiał (2), a docisk powoduje jego zgrzanie (3) (trwałe połączenie). Zgrzewanie punktowe stosowane jest przy produkcji karoserii samo-chodowych, ram pojazdów, itd.
Zgrzewanie tarciowe (FR) (rys. 1.5b) – przedmiot obrabiany jest dociskany i obracany względem zamocowanego tak długo, aż wytworzone ciepło wystarczy

18
do powstania połączenia. W ten sposób łączone są elementy narażone na działa-nie wysokich temperatur, a połączenie ich metodami spawalniczymi nie jest moż-liwe. Zgrzewanie tarciowe stosowane jest np. do łączenia trzonka i grzybka zawo-rów wydechowych silników spalinowych.
a) b)
Rys. 1.5. Metody zgrzewania elementów maszyn: a) zgrzewanie punktowe, b) zgrzewanie tarciowe.
1.1.4. Połączenia wtłaczane/skurczoweSą to połączenia siłowe tylko warunkowo rozłączne. Ponieważ średnica
otworu jest mniejsza niż wałka, jest to połączenie wtłaczane. Ze względu na tarcie statyczne występujące pomiędzy wałkiem i nałożoną na niego piastą, tego typu połączenia mogą przenosić duże siły osiowe i promieniowe.
Ze względu na sposób przygotowania i przeprowadzenia połączenia, dzieli się je na następujące rodzaje:• wtłaczane – część wewnętrzna i zewnętrzna są łączone przez wtłaczania
osiowe za pomocą młotka lub prasy; tego typu połączenie jest stosowane przy montażu tulei metalowo-gumowych w zawieszeniach pojazdów, osadzeniu łożysk tocznych na piastach lub w korpusach itd.,
• połączenia na gorąco – część zewnętrzna po podgrzaniu nasuwana jest na cześć wewnętrzną, ponieważ w wyniku podgrzania część zewnętrzna rozsze-rza się, zwiększając swoje wymiary; w wyniku takiego zjawiska nie jest wyma-gana duża siła do wtłoczenia (umieszczenia) części względem siebie, ponadto po ostygnięciu elementów uzyskuje się dużą wytrzymałość połączenia; części podgrzewane są za pomocą płyty grzejnej, palnika lub kąpieli olejowej; połą-czenie tego typu ma zastosowanie do łączenia wałka z piastą dla niedużych układów napędowych, np.: piasta napędu sprężarki klimatyzacji w pojazdach samochodowych, piasta pompy wody małej mocy itd.,

19
• połączenia przez oziębianie (połączenie skurczowe) – w tym celu część wewnętrzna jest schładzana suchym lodem lub płynnym azotem, zatem nie występuje zjawisko utleniania powierzchni; połączenie przez oziębianie polega na zmianie (pomniejszeniu) wymiaru poprzez chłodzenie i jest stoso-wane np. do osadzania gniazd zaworowych (w pierścienicach gniazda zaworu) czy łożysk nośnych piasty koła. Jakkolwiek wyżej omawiane rodzaje połączeń zaliczane są do grupy połączeń
nierozłącznych, to jednak w wielu przypadkach można je (zwłaszcza połączenia wtłaczane) rozłączać i łączyć kilkakrotnie, bez uszkodzenia części łączonych.
1.1.5. Połączenia nitowanePołączenie nitowane są nierozłączne. Nity wytwarza się ze stali, miedzi,
mosiądzu i aluminium. Elementami łączącymi w tego typu połączeniach są nity, które składają się z łba, trzona (szyjki) i zakuwki.
Nity stalowe o średnicy poniżej 10 mm zamyka się na zimno (zakuwa) i uzy-skuje się w ten sposób połączenie kształtowe. Nity powyżej 10 mm są zamykane na gorąco, gdzie w wyniku stygnięcia powstaje skurcz temperaturowy powodu-jący, ogólnie mówiąc, zwiększenie wytrzymałości tego rodzaju połączenia. Zamy-kanie nita może odbywać się ręcznie (młotkami), półręcznie (za pomocą młotków pneumatycznych albo elektrycznie) lub maszynowo za pomocą nitownic hydrau-licznych.
Na rys 1.6 przedstawiono podstawowe rodzaje nitów stosowanych w budowie maszyn.
Rys. 1.6. Przegląd podstawowych rodzajów nitów stosowanych w budowie maszyn [11].

20
1.1.6. Połączenia klinowePołączenia klinowe należą do połączeń rozłącznych spoczynkowych, tzn., że
części połączone nie mogą zmieniać wzajemnego położenia. Połączenie klinowe polega na łączeniu części maszyn przy pomocy klinów.
Klinami nazywamy części maszynowe posiadające dwie przeciwległe powierzchnie pochylone względem siebie pod pewnym kątem, zwanym kątem rozwarcia klina.
Kliny dzielimy na wzdłużne, poprzeczne i nastawcze. Kliny wzdłużne (rys. 1.7a) służą głownie do łączenia piasty z wałem i mogą występować w wyko-naniu ściętym (rys. 1.7b) lub zaokrąglonym (rys. 1.7c) oraz noskowe (rys. 1.7a).
W połączeniach lekkich stosuje się niekiedy kliny płaskie (rys. 1.7g), a nawet wklęsłe (rys. 1.7h), zaś w połączeniach ciężkich, przenoszących znaczne momenty skręcające zmienne co do kierunku, należy stosować kliny styczne (rys. 1.7f).
Kliny poprzeczne (rys. 1.7d) stosowane są zwykle do łączenia wałów przy pomocy tulei złącznej lub gniazda w jednym z wałów. Często spotyka się połącze-nie klinowe stożkowe, przedstawione na rys. 1.7d.
Kliny nastawcze (rys. 1.7e) służą do ustalania wzajemnego położenia nastaw-nych części mechanizmów. Na rys 1.7 przedstawiono główne rodzaje połączeń klinowych.
Rys. 1.7. Rodzaje połączeń klinowych: a) klin noskowy, b) klin wzdłużny wpuszczany ścięty, c) klin wzdłużny wpuszczany zaokrąglony, d) klin stożkowy, e) klin nastawczy, f) klin styczny, g) klin płaski, h) klin wklęsły [8].
1.1.7. Połączenia wpustowe i wielowypustowe
Połączenia wpustowe Wpustami nazywamy części łączące podobne do klinów wzdłużnych, lecz nie-
posiadających pochylenia (rys. 1.8). Służą one (tak jak kliny) głownie do łącze-nia wałów z piastami nakładanych na nie części. Wpusty osadzane są w rowkach

21
wałów ciasno i mogą być do wałów przymocowywane wkrętami (tzw. wpusty otworowe).
Rys. 1.8. Połączenie dwóch wałów za pomocą wpustów z wykorzystaniem tulei łączącej.
Najczęściej spotyka się następujące odmiany wpustów:a) wpusty pryzmatyczne ścięte, pełne lub otworowe,b) wpusty pryzmatyczne zaokrąglone (rys 1.8), pełne lub otworowe,c) wpusty czółenkowe (Woodruffa).
Połączenia wielowypustowePołączenie wielowypustowe (wielokarbowe) – połączenie rozłączne ruchowe
bez elementów pośredniczących, używane do osadzania piast na wałach. Ponie-waż rowki pod wpusty osłabiają wał, coraz częściej stosowane są (nieposiadające tych wad) połączenia wielowypustowe. Z tego powodu stosowane są w bardziej odpowiedzialnych zastosowaniach. W połączeniu wielowpustowym na wałku nacięte są rowki, a piasta jest ukształtowana tak, by do nich pasowała. Połączenie wielowpustowe jest trudniejsze do wykonania niż wpustowe.
W zależności od kształtu powierzchni czopa wyróżnia się następujące rodzaje połączeń: wielowypustowe (rys. 1.9a), wieloboczne (wielokarbowe) (rys. 1.9b).
Na rys 1.9 przedstawiono piastę wielowypustową (rys 1.9a) i piastę-wał, łączoną za pomocą połączenia wielokarbowego (rys. 1.9b).

22
a) b)
Rys. 1.9. Przykładowe rodzaje połączeń kształtowych: a) połączenie wielowypustowe, b) połączenie wielokarbowe.
1.1.8. Połączenia sworznioweSworznie są to krótkie wałki służące zwykle do tworzenia połączeń przegu-
bowych (par kinematycznych). Sworzeń jest zwykle unieruchomiony w jednej z łączonych części przez wcisk lub zabezpieczony kołkiem albo zawleczką.
Sworznie są wykonywane jako: walcowe (pełne i drążone) oraz kształtowe z łbem lub bez łba. Na rys. 1.10 przedstawiono typowe połączenie sworzniowe, tworzące przegub walcowy.
Rys. 1.10. Połączenie sworzniowe tworzące przegub walcowy.
1.1.9. Połączenia kołkowePołączenia kołkowe są to połączenia realizowane za pomocą elementów kon-
strukcyjnych o kształcie walca lub stożka – nazywanych kołkami. Rozróżnia się:
• kołkizłączne–przeznaczonedołączeniaczęścimechanicznych,• kołki ustalające – przeznaczone do ustalania wzajemnego położenia części
mechanicznych, • kołkiprowadzące–pełniącerolęelementówprowadzącychwparachkinema-
tycznych.

23
Na rys. 1.11 przedstawiono połączenie piasty z wałem za pomocą kołka złącz-nego.
Rys. 1.11. Połączenia konstrukcyjne przy pomocy kołków złącznych.
1.1.10. Połączenia gwintowePołączenie gwintowe – połączenie rozłączne spoczynkowe, w którym ele-
mentem łączącym są gwintowane łączniki: śruba z nakrętką lub wkręt. W skład połączenia gwintowego wchodzą także elementy pomocnicze, takie jak podkładki i zawleczki.
Zadaniem podkładek jest ochrona elementów złącza przed zadrapaniem w czasie dokręcania łącznika oraz niekiedy wraz z zawleczką zabezpieczanie przed samoczynnym odkręcaniem się nakrętki.
Ze względu na rodzaj użytego łącznika, połączenia gwintowe dzielą się na połączenia śrubowe i wkrętowe.
Połączenia śrubowe – w tego rodzaju połączeniach (rys. 1.12) śruba (1) i nakrętka (2) łączą dwa lub więcej elementów (3). Elementy te w miejscu łącze-nia są przewiercane tak, by otwór mieścił śrubę z pasowaniem luźnym. Śruba w takim połączeniu może przenosić tylko obciążenia osiowe, np. jeżeli elementy połączenia są od siebie w sposób naturalny odciągane (pokrywa koła połączona z jego korpusem). Nakrętka w takim połączeniu dokręcana jest na tyle mocno, by zapewnić integralność połączenia, gdy nie jest ono obciążone.
Rys. 1.12. Połączenie śrubowe: 1 – śruba, 2 – nakrętka, 3 – łączone elementy.

24
Połączenie za pomocą wkrętu jest to łącznik w połączeniu gwintowym doci-skowym. W wielu konstrukcjach zastępuje połączenia śrubowe (prostszy i tań-szy w wykonaniu lecz o mniejszej wytrzymałości mechanicznej i trwałościo-wej). Wkręt w porównaniu do śruby różni się sposobem utwierdzenia, kształtem i typem łba (śruby nie posiadają nacięcia na łbach). Na rys. 1.13 przedstawiono kształty łbów przykładowych wkrętów.
Rys. 1.13. Kształty łbów wkrętów: a) walcowy płaski, b) walcowy soczewkowy, c) stoż-kowy płaski, d) stożkowy soczewkowy, e) kulisty, f) bez łba. Nacięcie we łbie wkręta pod wkrętak może mieć kształt: g) prosty, h) krzyżowy (Phillips, Pozidriv), i) kwadratowy, j) sześciokątny (inbusowy), k) ośmiokątny [6].
Śruba – jest jednym z elementów połączenia śrubowego. W budowie maszyn łączniki te znajdują różnorakie zastosowanie, dlatego też występują w wielu odmianach. Śruby różnią się między sobą wielkością, kształtem łba, trzpieniem oraz zakończeniem.
Nakrętka – łącznik w połączeniu śrubowym (rys. 1.14). Jest pierścieniem z naciętym na całej długości otworu gwintem. Nakręcana jest na wolny koniec trzonu śruby zgodnie z wymaganiami montażowymi.
Rys. 1.14. Kształt i postacie nakrętek: a) sześciokątne, b) koronowe, c) czworokątne, d) okrągłe otworowe, e) okrągłe rowkowe, f) skrzydełkowe, g) radełkowe [6].
Gwint to śrubowe nacięcie na powierzchni walcowej, zewnętrznej lub wewnętrznej. Komplementarne gwinty, wewnętrzny i zewnętrzny, mają tak

25
dobrany kształt, że dokładnie pasują do siebie. Ruch obrotowy elementu z gwin-tem zewnętrznym powoduje przesuwanie się tego elementu względem elementu z gwintem wewnętrznym. Gwint może być interpretowany jako równia pochyła nawinięta na powierzchnię walcową. W związku z tym zjawiska zachodzące w połączeniu gwintowym są identyczne jak na równi pochyłej, dlatego też śrubę zalicza się wraz z równią pochyłą do maszyn prostych.
Podstawowe parametry gwintu walcowego• średnicagwintud: jest to średnica okręgu opisanego na zewnętrznych wierz-
chołkach gwintu w prostopadłym przekroju poprzecznym śruby. Średnica ta odpowiada średnicy wewnętrznej D nakrętki,
• skok gwintu P: odległość pomiędzy wierzchołkami gwintu w przekroju wzdłużnym śruby lub nakrętki,
• zaokrąglenieszczytuidnabruzdygwintuR: w gwintach trójkątnych unika się pozostawiania zarówno ostrych krawędzi szczytu gwintu jak i bruzdy gwintu, gdyż powoduje to spiętrzenie naprężeń w obszarze takiego karbu.Zależnie do zarysu gwintu w płaszczyźnie przechodzącej prze jego oś rozróż-
niamy gwinty: trójkątne, trapezowe, okrągłe o skoku metrycznym lub calowym. Najczęściej spotykany jest gwint trójkątny.
Gwint może być prawy lub lewy zależnie od kierunku przebiegu zwoju.
Rys. 1.15. Wybrane parametry geometryczne gwintu metrycznego o zarysie trójkąty oraz trapezowym: P – skok gwintu, d – średnica gwintu.
1.1.11. Połączenia rurowePołączenie rurowe – przewody rurowe połączone łącznikami (złączki,
kolanka, łuki, trójniki itd.) oraz zaworami, przez które przesyłany jest czynnik roboczy (ciecze, gazy, opary). Dzielimy je na (rys. 1.16):a) gwintowe – stosowane są w przewodach wodnych, parowych i gazowych
o niewielkiej średnicy i przy niskich i średnich ciśnieniach oraz w przewodach

26
wiertniczych. Ich uszczelnienie stanowią konopie owijane na gwincie i minia z pokostem lub taśma teflonowa. Gwinty zewnętrzne mogą być walcowe lub stożkowe, gwinty w otworach tylko walcowe. Należą do łatwo rozłączalnych,
b) kielichowe – są stosowane przy niskich ciśnieniach. Polegają na włożeniu końca jednej rury (czopa) do drugiej rury (kielicha). Uszczelnienie odbywa się przy pomocy sznura smołowego i smoły (przewody ściekowe) lub ołowiu – obecnie do uszczelnienia wykorzystywana jest uszczelka gumowa lub siliko-nowa. Połączenie te nie mogą przenosić obciążeń wzdłużnych,
c) kołnierzowe – są stosowane przy wysokich ciśnieniach. Kołnierze mogą być stałe lub luźne, nakładane na występ wylotu rury. Materiałem uszczelniającym złącza, zależnie od rodzaju przewodzonej cieczy lub gazu, może być guma, tektura, tkaniny, miękkie metale, tworzywa sztuczne.
a) b) c)
Rys. 1.16. Powszechne połączenia rurowe: a) gwintowe, b) kielichowe, c) kołnierzowe.
1.2. Wały i osie
Osią lub wałem nazywa się element maszyny podparty w łożyskach i pod-trzymujący osadzone na nim części maszyn, które wykonują ruchy obrotowe lub wahadłowe (rys. 1.17). Głównym zadaniem wału jest przenoszenie momentu obrotowego, zatem wał narażony jest jednocześnie na skręcanie oraz – pod wpły-wem sił poprzecznych – na zginanie. W niektórych przypadkach wał może być narażony tylko na skręcanie.
Oś nie przenosi momentu obrotowego i jest narażona tylko na zginanie. Oś może być nieruchoma, utwierdzona w miejscu podparcia lub ruchoma, osadzona w łożyskach. Oś nieruchomą mocuje się w podporach za pomocą połączeń wpu-stowych, gwintowych itp. Krótką oś nazywa się czasami sworzniem. Zarówno osie, jak i wały mogą być dodatkowo obciążone siłą poosiową, np. gdy elementami osadzonymi na nich są koła zębate skośne lub stożkowe.

27
Rys. 1.17. Schematy osi i wału: a,b) wału, c) osi nieruchomej, d) osi ruchomej [8].
Rodzaje osi i wałów Osie i wały sztywne są to pręty o przekroju okrągłym albo sześciokątnym, lub
innym. Różnią się osie i wały gładkie o prawie niezmiennym przekroju na całej długości oraz schodkowe o zmiennych przekrojach, dostosowanych do obciążenia i funkcji osi lub wału.
Osie z reguły są proste, natomiast wały mogą być proste lub wykorbione (rys. 1.17). W niektórych urządzeniach stosuje się wały giętkie, służące do prze-noszenia napędu na elementy wykonujące ruchy przestrzenne względem źródła napędu. Zależnie od liczby łożysk, będących podporami wałów, rozróżnia się wały jedno, dwu i wielopodporowe. W zależności od spełnianych funkcji wału często stosuje się nazwy: wał główny pomocniczy rozrządczy itp. Wały mogą być pełne lub drążone. Wały drążone stosuje się w celu zmniejszenia ciężaru konstrukcji.
Rys. 1.18. Rodzaje wałów i osi: a) wał gładki, b, c) wały schodkowe, d) wał wykorbiony, e) oś nieruchoma [8].
Czopami nazywa się odcinki osi lub wału, których powierzchnie stykają się ze współpracującymi elementami: łożyskami, kołami zębatymi itp. Rozróżnia się czopy ruchowe i spoczynkowe. Czopy ruchowe współpracują z panewkami łożysk ślizgowych, z kołami przesuwnymi lub obracającymi się względem nieruchomej osi, natomiast czopy spoczynkowe współpracują z elementami osadzonymi na stałe względem wału i obracającymi się wraz z nim.

28
1.3. Przekładnie
Przekładnią nazywamy urządzenie służące do przenoszenia ruchu z silnika na maszynę roboczą. W każdym układzie przenoszenia napędu (momentu obroto-wego) wyróżniamy pewne elementy, które decydują bezpośrednio o charakterze i wielkości przenoszonego ruchu. Zespół tych elementów nazywamy przekładnią, np.: koła pasowe połączone pasem, zazębiające się dwa koła zębate itd.
Element przekładni, zwany napędzającym, przekazuje prędkość obrotową sil-nika w sposób bezpośredni lub pośredni elementowi napędzanemu. Rozróżnia się więc koła napędzające (czynne) i napędzane (bierne).
Przełożeniem przekładni i nazywa się stosunek prędkości obrotowych n2 koła napędzanego do prędkości n1 koła napędzającego.
W zależności od wartości przełożenia rozróżnia się następujące rodzaje prze-kładni:1. reduktory (przekładnie zwalniające i>1), w których prędkość kątowa koła
biernego jest mniejsza od prędkości kątowej koła czynnego,2. multiplikatory (przekładnie przyspieszające, i<1), w których prędkość kątowa
koła biernego jest większa od prędkości kątowej koła czynnego.W zależności od konstrukcji elementów roboczych przekładni wyróżnia się
następujące rodzaje przekładni mechanicznych: cierne, pasowe, łańcuchowe, przekładnie zębate itd. (rys 1.19).
1.3.1. Przekładnie ciernePrzekładnie cierne – przenoszą ruch obrotowy jednego koła na drugi dzięki
sile tarcia, wywołującej dociskanie obu kół do siebie bezpośrednio lub przez część pośredniczącą.
Rozróżnia się przekładnie cierne o stałym przełożeniu, zmiennym w sposób ciągły lub płynny. Sprawność takich przekładni waha się w granicach 85÷92%.
Mają one obecnie zastosowanie w drobnych urządzeniach AGD i drukarskich (mechanizm podajnika papieru do drukarki).
1.3.2. Przekładnie cięgnoweTego typu przekładnie charakteryzują się tym, że ruch przenoszony jest z jed-
nego koła na drugi za pośrednictwem cięgna. W zależności od rodzaju cięgna, którym może być pas, lina lub łańcuch, rozróżniamy przekładnie:• przekładniapasowa – ruch przenoszony jest z jednego koła na drugie dzięki
tarciu pasa o koła. Ze względu na kształt pasa napędowego rozróżnia się pasy: płaskie, klinowe, zębate, rowkowe. Ponieważ pasy w wyniku eksploatacji roz-ciągają się, przekładnie tego typu posiadają koła napinające w celu niwelacji efektu wydłużenia pasa. Tego typu przekładnie stosowane są np.: do napędu

29
alternatora w silnikach spalinowych (pasek płaski lub klinowy), napędu wałka rozrządu (pasek zębaty) itd.,
• przekładnielinowe – ruch roboczy przekazywany jest za pomocą liny włó-kiennej lub stalowej, prowadzonej w rowkach kół. Tego typu przekładnie sto-sowane są głownie przy dużych odległościach kół napędowych, np.: windy, wyciągarki na stokach,
• przekładniełańcuchowe – jako cięgno tej przekładni stosowany jest łańcuch drabinkowy lub zębaty. Wielkość łańcucha określana jest podziałką odległo-ści dwóch sąsiednich ogniw i wyrażona jest w calach. Konstrukcja zarysu zęba koła łańcuchowego uzależniona jest od przełożenia i podziałki łańcucha. Przekładnie tego typu stosuje się, gdy pożądana jest niezmienność przełożenia i gdy ze względu na duże odległości nie można zastosować przekładni zęba-tej. Tego typu przekładnia spotykana jest, np.: w układzie napędowym roweru, przenośnikach, w układach rozrządu silników spalinowych (układ silnika typu V).
Rys. 1.19. Rodzaje przekładni mechanicznych: a) cierna, b) pasowa, c) łańcuchowa, d-g) przekładnie zębate (d – walcowa, e – stożkowa, f – planetarna, g – ślimakowa) [5].

30
1.3.3. Przekładnie zębatePrzekładnią zębatą pojedynczą nazywa się mechanizm utworzony z dwóch
kół zębatych, mogących przenieść ruch dzięki wzajemnemu zazębieniu się ich zębów. Główne rodzaje przekładni zębatych przedstawiona na rys 1.20. Przekład-nie zębate nazywają się podobnie jak koła, z których się składają, np.: przekładnia stożkowa składa się z dwóch kół stożkowych itd.
Rys. 1.20. Rodzaje przekładni zębatych: a-d) walcowa, e) zębatkowa, f-h) stożkowa, i) śrubowa, j) ślimakowa [8].
Przedstawione na rys 1.20 przekładnie są przekładniami pojedynczymi (jed-nostopniowymi). Z przekładni pojedynczych są tworzone przekładnie złożone. W zależności od ustawienia przekładni pojedynczych przekładnie złożone dzieli się na:
– wielostopniowe – z szeregowym ustawieniem przekładni pojedynczych,– wielorzędowe – z równoległym ustawieniem przekładni pojedynczych.

31
Przekładnie zębate znajdują szerokie zastosowanie we wszystkich dziedzinach techniki i stanowią obecnie najliczniejszą i najbardziej rozpowszechnioną grupę przekładni mechanicznych. W stosunku do innych przekładni mechanicznych przekładnie zębate mają m.in. następujące zalety: stałość przełożenia, wysoką sprawność (95÷99%), zwartą konstrukcję, trwałość i niezawodność w działaniu.
1.4. Sprzęgła
Sprzęgłem nazywamy zespół elementów, służący do połączenia dwóch obro-towo niezależnie osadzonych elementów maszyny (najczęściej wałów): czynnego i biernego, tzn. napędzanego i napędzającego, o osiach leżących na wspólnej pro-stej (sprzęgła poste) lub przecinających się pod kątem ostrym (sprzęgła przegu-bowe), w celu przeniesienia momentu i ruchu obrotowego, przy zachowaniu rów-ności średnich momentów obrotowych w elemencie czynnym i biernym. Na rys. 1.21 przedstawiono podział sprzęgieł wg cech funkcjonalno-konstrukcyjnych.
Rys. 1.21. Klasyfikacja sprzęgieł wg cech funkcjonalno-konstrukcyjnych.
W skład sprzęgieł wchodzi szereg prostszych elementów, jak różnego rodzaju połączenia czopa z piastą (wpusty, kliny, kołki), łączniki śrubowe, nity, sprężyny, zęby, łańcuchy itp. Przykładem sprzęgła sztywnego może być sprzęgło tarczowe.
Poszczególne rodzaje sprzęgieł są używane do określonych celów. W przy-padku, gdy nie ma potrzeby szybkiego złączania i rozłączania części czynnej i biernej sprzęgła, są stosowane sprzęgła nierozłączne.
Sprzęgła sztywne (rys. 1.22) służą do łączenia dokładnie współosiowych wałów w jedną giętnie i skrętnie sztywną całość. Sprzęgła luźne proste służą do łączenia wałów przy nieznacznym braku współosiowości, kompensują poprzeczne i wzdłużne przemieszczenia się końców wałów i nieznaczne wychylenia ich osi lub kombinacje tych przemieszczeń. Sprzęgła luźne przegubowe umożliwiają łączenie

32
wałów o osiach przecinających się pod kątem ostrym. Sprzęgła te są „sztywne skrętnie” (brak luzu promieniowego), lecz nie mogą przenosić momentów gną-cych. Sprzęgła podatne skrętnie pozwalają na względnie ograniczony obrót koń-ców łączonych wałów. Umożliwiają ruch wałów przy niewielkim braku współo-siowości, służą do łagodzenia nierównomierności przenoszonego momentu obro-towego, tłumienia drgań skrętnych, zmiany częstości własnych drgań skrętnych układu czy do równoczesnego spełnienia kilku wymienionych wcześniej zadań.
Rys. 1.22. Widok ogólny sprzęgła sztywnego produkcji SKF [10].
W razie potrzeby szybkiego złączania i rozłączania wałów czynnego i biernego stosuje się sprzęgła rozłączne, sterowane z zewnątrz przez obsługę. Jeśli włącze-nie odbywa się przy równych lub bardzo zbliżonych prędkościach kątowych wałów czynnego i biernego, używa się sprzęgieł rozłącznych ze sprzężeniem kształtowym. W przypadku gdy włączanie musi się odbywać przy znacznej różnicy prędkości wałów najczęściej używane są sprzęgła cierne. Można również używać w takich połą-czeniach sprzęgieł hydrokinetycznych rys. 1.23a (elementem pośrednim jest ciecz hydrauliczna) ze sterowanym napełnieniem lub też sprzęgła elektromagnetycznego rys. 1.23b (elementem pośrednim jest ciecz lub proszek magnetyczny, tj. zmieniający swoją lepkość i gęstość w polu magnetycznym) ze sterowanym wzbudzeniem.
a) b)
Rys. 1.23. Widok ogólny budowy sprzęgła hydrokinetycznego – a) i sprzęgła elektroma-gnetycznego – b).

33
Następną grupą są sprzęgła rozłączne samoczynne. W sterowaniu tego rodzaju sprzęgłami wykorzystuje się siły bezwładności (rys. 1.24). Mają one zasto-sowanie do przenoszenia momentu obrotowego w ręcznych maszynach ogrodni-czych i leśnych (kosiarki spalinowe, pilarki itp.).
Rys. 1.24. Widok mechanizmu sprzęgła odśrodkowego promieniowego pilarki spalino-wej: 1 – ciężarek, 2 – sprężyna, 3 – zabierak.
Sprzęgła luźne proste (podatne) (rys. 1.25) – sprzęgła te pozwalają kom-pensować błędy współosiowości wałów, mogą dopuszczać pewne luzy wzdłużne, poprzeczne oraz odchylenia od osi łączonych wałów, czy też kombinacje tych czynników. Jest to możliwe dzięki względnym ruchom wewnętrznym części tych sprzęgieł. Charakteryzują je luzy pomiędzy częściami przenoszącymi obciąże-nia i ślizganie się tych części po sobie. Sprzęgła luźne proste nie nadają się więc do przenoszenia momentów obrotowych o zmiennym kierunku, jak również do dużych obciążeń i prędkości. Powierzchnie ślizgowe tych sprzęgieł wymagają smarowania. Przykładem sprzęgła luźnego prostego jest sprzęgło kłowe.
Rys. 1.25. Sprzęgła elastyczne typu elastomerowego zawierają ściśnięty wstępnie element kauczukowy, który zapewnia dodatkową wytrzymałość i długą trwałość.
1
23
1 1

34
Sprzęgła luźne przegubowe – pozwalają na przenoszenie momentu skręcają-cego przy dużych kątach przecięcia się osi łączonych wałów. Przykładem sprzęgła przegubowego jest tzw. przegub Rzeppa, stosowany do napędu kół samochodo-wych.
Sprzęgła podatne skrętnie – spotyka się sprzęgła zwykłe o stałej sztywności lub progresywne, w których sztywność zwiększa się wraz ze zwiększaniem się kąta względnego obrotu części napędzającej i napędzanej sprzęgła. Innym podziałem tego rodzaju sprzęgieł jest podział na sprzęgła swobodne i tłumiące. Podstawo-wym zadaniem sprzęgieł swobodnych jest łagodzenie nierównomierności prze-noszonego momentu obrotowego na zasadzie zmiany nadwyżek energii kinetycz-nej bezwładnego układu w energię sprężystego odkształcania elementów podat-nych i oddawanie jej w chwilach niedoboru energii. Sprzęgła tłumiące stosuje się w przypadku niebezpieczeństwa występowania rezonansowych drgań skręt-nych. Ich działanie polega na pochłanianiu i rozpraszaniu energii drgań. Przykład takiego sprzęgła można odnaleźć w układach napędowych współczesnych samo-chodów pod nazwą „sprzęgło dwumasowe”.
Sprzęgła rozłączne ze sprzężeniem kształtowym (kształtowe, kłowe – rys. 1.26) – w sprzęgłach tych moment obrotowy jest przenoszony za pomocą zazę-biających się systemów kłów lub zębów, umieszczonych na powierzchni czołowej lub obwodzie dwóch tarcz, lub piast sprzęgła. Jedna z nich jest umieszczona nieru-chomo na końcu jednego z wałów, druga zaś przesuwnie poosiowo na końcu dru-giego wału. Przy pomocy mechanizmu sterującego dosuwa się ją do tarczy nierucho-mej powodując zazębienie. Wyłączanie sprzęgła może odbywać się bez ograniczeń, jeśli dysponujemy odpowiednią siłą wyłączania, a naciski występujące pod obciąże-niem na powierzchniach roboczych kłów nie są zbyt wysokie. Włączanie natomiast jest możliwe tylko przy niewielkich różnicach prędkości obwodowych obydwu połówek sprzęgła. Zaletą tych sprzęgieł jest brak poślizgu i zwartość budowy. Aby uniknąć nadmiernego zużycia powierzchni roboczych, należy dbać o równomierny podział obciążenia na wszystkie kły oraz stosować materiały odporne na wysokie naciski. Odnosi się to szczególnie do sprzęgieł włączanych w ruchu.
Sprzęgła cierne – podstawowe typy sprzęgieł ciernych różnią się: kierunkiem i sposobem docisku, kształtem, liczbą i materiałem powierzchni ciernych. Najbar-dziej charakterystyczną cechą jest kierunek siły sprzęgającej powierzchnie cierne, tj.: promieniowy, osiowy i obwodowy. Kształt powierzchni ciernych może być płaski, walcowy lub stożkowy (rys. 1.27). Sprzęgła stożkowe pozwalają na zasa-dzie działania klina na uzyskanie większych docisków przy tej samej sile sprzę-gającej niż w innych sprzęgłach. Materiał powinien mieć jak największy współ-czynnik tarcia, mało zależny od prędkości poślizgu, temperatury i obciążenia. Powinien być wytrzymały mechanicznie i termicznie, mieć dobrą przewodność cieplną i wykazywać odporność na zużycie przy jednoczesnym braku skłonności do zacierania.

35
Rys. 1.26. Sprzęgło kłowe GERWAH z wkładką elastomerową, ze śrubami zaciskowymi.
Rys. 1.27. Sprzęgło cierne stożkowe: 1 – wał napędzający, 2 – wał napędzany, 3 – okładziny cierne, 4 – sprężyna.
Sprzęgła rozłączne sterowane momentem obrotowym (bezpieczeństwa) – sprzęgła bezpieczeństwa chronią elementy mechanizmu przed przeciążeniem. Reagują na wartość przenoszonego momentu obrotowego. Działają na dwóch zasadach: całkowitego rozłączenia z chwilą wzrostu przenoszonego momentu skręcającego ponad bezpieczną wartość graniczną lub na zasadzie ogranicze-nia wartości przenoszonego momentu do wartości zadanej. Do pierwszej grupy należą sprzęgła bezpieczeństwa kształtowe. W przykładowym sprzęgle tego typu najsłabszym elementem jest kołek lub kilka kołków, które zostają ścięte po prze-kroczeniu określonej wartości momentu skręcającego. Ponowny rozruch jest możliwy dopiero po wymianie kołków, co jest dość czasochłonne. Do drugiej grupy należą sprzęgła kształtowo-cierne i cierne. Ich zaletą jest możliwość regu-lacji wartości momentu skręcającego oraz łatwość ponownego włączenia. W cier-nych sprzęgłach bezpieczeństwa nie występuje zanik przenoszonego momentu, jak w sprzęgłach kształtowych, ani jego silny spadek, jak w kształtowo-ciernych, lecz ograniczenie do zadanej wartości. W chwili jej przekroczenia w sprzęgle następuje poślizg.
Sprzęgła rozłączne jednokierunkowe – sprzęgła jednokierunkowe działają na zasadzie zachowania jednokierunkowości siły obwodowej jako siły nacisku

36
lub tarcia. W sprzęgłach jednokierunkowych kształtowych jednokierunkowość działania siły zapewniają np. zapadki (rys. 1.28). Kiedy część napędowa sprzęgła ma mniejszą prędkość kątową od części napędzanej, zapadki przestają chwytać i zostają wciśnięte w swoje gniazda. W sytuacji odwrotnej, zapadki pod wpływem działania siły odśrodkowej wysuwają się i wywierają nacisk na część napędzaną. W sprzęgłach jednokierunkowych ciernych pomiędzy część napędową a napę-dzaną są wprowadzane elementy pośredniczące, które są między nimi zaklesz-czane, gdy prędkość kątowa części napędowej jest większa od prędkości kątowej części napędzanej. Jeśli jest przeciwnie, zakleszczenie znika. W wyniku zaklesz-czenia na powierzchni styku elementów pośredniczących powstają naciski i siły tarcia, które są w stanie zrównoważyć przenoszoną siłę obwodową. Sprzęgła jed-nokierunkowe znajdują zastosowanie w pojazdach mechanicznych jako tzw. sprzęgła wolnego biegu, zapobiegające przenoszeniu momentu obrotowego z kół jezdnych na źródło napędu, w napędach dmuchaw i wentylatorów dla umożliwie-nia im swobodnego wybiegu w chwili zatrzymania silnika napędowego, w silni-kach spalinowych i turbinach gazowych do podłączenia silnika rozruchowego, do równoległego łączenia silników lub turbin.
Rys. 1.28. Widok mechanizmu sprzęgła jednokierunkowego napędu zębnika rozrusznika samochodowego.
1.5. Hamulce
Hamulce maszynowe są to urządzenia służące do pochłaniania energii mecha-nicznej (energii ruchu), którą posiada obracający się element maszyny.
Hamulce są jak gdyby sprzęgłami ciernymi, których zadaniem nie jest przeno-szenie ruchu w układzie napędowym lecz zahamowanie tego ruchu.
W zależności od zasady sterowania dzielimy hamulce na dwie grupy:– hamulce mechaniczne – odbierają energię ruchu wirującego części lub
zespołu poprzez wytworzenie tarcia między tymi częściami i odpowied-

37
nimi nieruchomymi częściami hamulca. W zależności od kształtu ele-mentów ciernych rozróżniamy hamulce: tarczowe (rys. 1.29a), bębnowe (rys. 1.29b) i taśmowe,
– hamulce elektromagnetyczne – podobnie jak hamulce mechaniczne, są również niejako sprzęgłami. Wielkość rozwijanej przez nie siły zależy od mocy elektromagnesu i natężenia prądu oddziaływującego na tarczę hamulcową.
a) b)
Rys. 1.29. Budowa ogólna hamulców mechanicznych: a) hamulec tarczowy sterowany hydraulicznie, b) hamulec bębnowy (widok szczęk hamulcowych przy zdemontowanym bębnie hamulcowym).
1.6. Łożyska
W celu zapewnienia prawidłowego funkcjonowania elementów maszyn poru-szających się ruchem obrotowym (osi, wałów oraz części maszyn na nich osadzo-nych) powinno być zachowane stałe położenie osi obrotu wałów względem nieru-chomej podstawy (np. korpusu obrabiarki). Zadanie to spełniają łożyska, a ustala-nie położenia osi i wałów względem korpusu maszyn i urządzeń nazywa się łoży-skowaniem.
Łożyska są obciążone siłami wynikającymi z ciężaru wałów i osadzonych na nich elementów (kół zębatych i pasowych, sprzęgieł itd.) oraz siłami pochodzą-cymi od obciążenia wałów i osi. Łożyska wywierają na wał reakcje równe co do wartości siłom obciążającym łożysko i przeciwnie zwrócone (podobnie jak reak-cje podpór w belkach).
Aby łożyska spełniały swoje funkcje, tzn. zapewniały ruch obrotowy wału i utrzymanie stałego położenia jego osi obrotu oraz przenosiły obciążenia, powinny się one charakteryzować małymi oporami ruchu, stabilną pracą, nieza-

38
wodnością działania oraz odpornością na zużycie, czyli dużą trwałością. Powinny też spełniać określone wymagania technologiczno-konstrukcyjne.
Łożyska dzieli się na dwie zasadnicze grupy: ślizgowe i toczne.W łożyskach ślizgowych powierzchnia czopa wału ślizga się po powierzchni
panewki (części łożyska współpracującej z czopem) lub bezpośrednio po powierzchni otworu łożyska, zatem w czasie funkcjonowania występuje tarcie śli-zgowe. Na rys 1.30 przedstawiono konstrukcje łożysk ślizgowych przegubowych stosowanych we współczesnych obiektach technicznych.
a) b) c) d)
Rys. 1.30. Przykłady łożysk ślizgowych przegubowych: a) łożysko ślizgowe, b) łożysko śli-zgowe z rowkiem smarnym, c) łożysko ślizgowe przegubowe – wzdłużne, d) łożysko śli-zgowe przegubowe – poprzeczno-wzdłużne [10].
W łożyskach tocznych między współpracującymi powierzchniami czopa i łożyska są umieszczone elementy toczne (np. kulki, walce itd.), wówczas zamiast tarcia ślizgowego występuje tarcie toczne. Przykrój przykładowych łożysk tocz-nych przedstawiono na rys 1.31.
a) b) c)
Rys. 1.31. Przekrój łożyska tocznego: a) łożysko kulkowe, b) łożysko walcowe, c) łożysko kulkowe wzdłużne [10].

39
Klasyfikacja i charakterystyka łożysk ślizgowych.W zależności od kierunku obciążeń, działających na łożysko, istnieją łożyska
ślizgowe: • poprzeczne, przeznaczone do przejmowania obciążeń prostopadłych do osi
obrotu wału (rys. 1.30 a,b),• wzdłużne, obciążone siłami działającymi zgodnie z kierunkiem osi obrotu
wału (rys. 1.30c),• poprzeczno-wzdłużne, przeznaczone do przejmowania obciążeń zarówno
prostopadłych, jak i zgodnych z kierunkiem osi obrotu (rys 1.30d).W celu zmniejszenia oporów ruchu pomiędzy powierzchniami ślizgowymi
panwi i czopa powinna być wytworzona warstwa nośna smaru lub gazu (najczę-ściej powietrza).
W zależności od sposobu podawania smaru rozróżnia się łożyska:• hydrostatyczne (aerostatyczne),wktórychwarstwanośna smaru (gazu) jest
podawana pod ciśnieniem,• hydrodynamiczne(aerodynamiczne),wktórychwarstwanośnasmaru(gazu)
powstaje na skutek ruchu obrotowego czopa względem panwi i wzajemnego poślizgu miedzy powierzchniami ślizgowymi.Smarowanie łożysk ślizgowych powietrzem stosuje się w urządzeniach o nie-
wielkiej nośności, ale o bardzo dużych prędkościach obrotowych – od 40 000 do 360 000 obr/min, np. w mikroturbinach wrzecion szlifierskich, wiertarkach den-tystycznych i chirurgicznych.
Tarcie występujące pomiędzy panwią łożyska a czopem wału zależy od mate-riałów współpracujących elementów, od stanu (chropowatości) ich powierzchni, od rodzaju smarowania oraz od sił nacisku (jest do nich proporcjonalne). Ciepło wydzielające się podczas tarcia może spowodować nagrzanie się łożyska do zbyt wysokiej temperatury i szybkie jego zużycie, dlatego trzeba dążyć do osiągnięcia możliwie małego tarcia.
W łożyskach ślizgowych, w zależności od charakteru funkcjonowania układu smarowania, można spotkać następujące rodzaje tarcia: • suche,przyktórymwspółpracująceczęściniesąsmarowane,• płynne,gdymiędzypowierzchniamiczopaipanwistalewystępujewarstewka
smaru,• mieszane, przy którym powierzchnie współpracujące częściowo stykają się
(głównie na wierzchołkach nierówności), zaś na pozostałym obszarze są roz-dzielone warstewką smaru.W łożyskach ślizgowych dąży się do uzyskania tarcia płynnego, ale w prak-
tyce najczęściej występuje tarcie graniczne. Praca łożysk ślizgowych w warunkach tarcia suchego (bez smarowania) nie jest stosowana. Uzyskanie tarcia płynnego jest możliwe przy zapewnieniu takich warunków pracy, aby ten smar stale znaj-dował się w szczelinie między czopem i panewką. Warunek ten jest spełniony,

40
gdy ciśnienie smaru w szczelinie nie jest większe niż naciski jednostkowe czopa na panewkę. Pożądane jest również, aby pracująca część panwi była pozbawiona rowków smarowych.
Klasyfikacja i charakterystyka łożysk tocznych Funkcjonowanie łożysk tocznych charakteryzuje się tym, że w wyniku tocze-
nia się elementów tocznych po bieżni wewnętrznej i zewnętrznej występuje tarcie – zwane tocznym.
Pierścień zewnętrzny łożyska jest osadzony w gnieździe korpusu maszyny lub w gnieździe oprawy łożyska, a pierścień wewnętrzny – na czopie wału. Koszyczek służy do zapewniania równomiernego rozmieszczania elementów tocznych na obwodzie łożyska (rys. 1.32).
Rys. 1.32. Budowa łożyska tocznego walcowego [10].
Istnieją także inne specjalne odmiany łożysk walcowych i igiełkowych bez koszyczka lub bez pierścienia wewnętrznego, oraz również łożyska walcowe bez pierścienia zewnętrznego.
W łożyskach tych występują naprężenia stykowe ze względu na prawie punk-towy lub liniowy styk elementów tocznych z bieżniami, dlatego wykonuje się je ze stali o specjalnych własnościach, głównie dużej twardości i odporności na ściera-nie.
Łożyska toczne dzielimy na: poprzeczne, wzdłużne i skośne, zdolne do prze-noszenia obciążeń prostopadłych do osi obrotu wału lub działających wzdłuż jego osi obrotu, lub zdolne do przenoszenia obu rodzajów obciążeń.
W zależności od kształtu elementów tocznych rozróżnia się łożyska kulkowe i walcowe. Wałeczki mogą być kształtu walcowego, stożkowego lub baryłkowego (rys. 1.33).

41
Rys. 1.33. Łożyska toczne: a) walcowe (igiełkowe), b) stożkowe, c) baryłkowe – wahliwe [10].
Łożyska toczne w celu zmniejszenia oporów toczenia i podniesienia ich trwa-łości są smarowane za pomocą smaru stałego, umieszczanego we wnętrzu łożyska, tzw. łożyska zamknięte (2RS). Inna metoda opiera się na smarowaniu bieżni łoży-ska i elektów tocznych za pomocą oleju lub mgły olejowej dostarczanej przez inne funkcjonujące układy lub części maszyny.
1.7. Układy hydrauliczne
Napęd hydrauliczny jest to napęd wywołany ruchem cieczy pod ciśnie-niem, oparty na prawie Pascala. Sterowanie hydrauliczne umożliwia sterowanie funkcjonowaniem maszyny lub urządzeniem za pomocą cieczy pod ciśnieniem (rys. 1.34). Jest wiele zalet napędów i sterowań hydraulicznych, główne z nich to: • możliwośćuzyskania bardzodużych sił (nieosiągalnychprzy innych rodza-
jach napędu) w sposób prosty, przy małych wymiarach urządzeń, • spokojnyipłynnyruch,wolnyoddrgańiwstrząsów,• możliwośćuzyskaniabezstopniowej zmianyprędkości ruchu–przeznasta-
wienie ręczne lub samoczynne, przy czym może ono odbywać się w czasie pracy urządzenia bez konieczności jego zatrzymywania,
• łatwośćiprostotazabezpieczeniaukładunapędowegoprzedprzeciążeniem,copoprawia warunki bezpieczeństwa pracy i zmniejsza awaryjność urządzenia,
• zmniejszeniesiłbezwładnościprzyruchachpostępowo-zwrotnych,• możliwośćużyciamałychsiłdosterowanianawetciężkichmaszyn,• łatwośćobsługiurządzeństerowniczychzdowolnegostanowiskatakżemożli-
wość zdalnego sterowania, • możność wprowadzenia daleko posuniętej mechanizacji i automatyzacji
ruchów,

42
• długotrwałość pracy elementów napędów i sterowań hydraulicznych orazłatwość ich wymiany,
• ekonomiczna eksploatacja indywidualnych napędów hydraulicznych zewzględu na każdorazowe dostosowywania się wielkości ciśnienia roboczego cieczy do chwilowo zachodzących wielkości oporów ruchu.
a) b)
Rys. 1.34. Schemat strukturalny: a) graficzny, b) prostej instalacji hydraulicznej.
Napędy i sterowania hydrauliczne pomimo niewątpliwych ogromnych zalet, dzięki którym znajdują coraz szersze zastosowanie, wykazują również wady: • trudność uszczelniania elementów ruchowych, jak również uzyskania ich
dużej żywotności; czynnik ten odgrywa coraz mniejszą rolę ze względu na szybko rozwijającą się technikę uszczelniania, która prowadzi nie tylko do zmniejszenia strat, ale także do podwyższania trwałości uszczelnień,
• stratycieczynanieszczelności–corazrzadsze,ponieważdowykonaniaele-mentów hydrauliki stosuje się najczęściej materiały walcowane, ciągnione i kute,
• niebezpieczeństwo dostawania się powietrza do obiegu, cowywołuje ruchydrgające i anomalię w funkcjonowaniu, szumy i niszczenie korodujące wewnętrznych części omywanych przepływającą cieczą z rozpuszczonym w niej powietrzem; obecnie stosuje się we wszelkich elementach hydraulicz-nych oraz przewodach zawory odpowietrzające do okresowego systematycz-nego odpowietrzania układu hydraulicznego,
• koniecznośćbardzodokładnegowykonaniaczęściurządzeńzasilających,ste-rujących i regulujących,
• trudnośćuzyskaniapowolnychruchówurządzeńhydraulicznych,

43
• koniecznośćdokonywania zabiegówkonserwacyjnych i remontowychprzezwysoko kwalifikowaną obsługę.W ogólnym bilansie zalety napędów i sterowań hydraulicznych znacznie prze-
wyższają ich wady, dlatego coraz częściej znajdują one zastosowanie w przemyśle. W chwili obecnej nie ma takiego rodzaju przemysłu, czy też dziedziny gospodarki narodowej, gdzie nie byłyby stosowane napędy i sterowania hydrauliczne. Są one stosowane w budowie maszyn technologii mechanicznych, lotnictwie, okrętow-nictwie, motoryzacji, kolejnictwie, maszynach budowlanych i drogowych, hut-nictwie, górnictwie, wiertnictwie, rolnictwie, łączności, gospodarce komunalnej, budownictwie lądowym i wodnym, sprzęcie uzbrojenia, pojazdach i rakietach kosmicznych.
Układy hydrauliczne składają się z sieci przewodów połączonych z tzw. arma-turą hydrauliczną w postaci: pomp zasilających, rozdzielaczy do kierowania ruchu cieczy, zaworów do ograniczania i zabezpieczania układu, elementów wykonaw-czych (siłowniki, silniki hydrauliczne), zbiorników oleju, chłodnic itd. Urządzenia służące do sterowania i regulacji kierunku ruchu i prędkości, i siły elementu robo-czego stanowią kolejną grupę urządzeń, nazywanych układem sterowania.
Złożone funkcjonalnie i zadaniowo układy hydrauliczne charakteryzują się nie tylko liczebnością poszczególnych elementów, ale także strukturą ich połą-czeń.
W celu uproszczenia i zwiększenia czytelności schematy konstrukcyjne (obiektowe) układów hydraulicznych zastępuje się schematami funkcjonalnymi w postaci symboli graficznych. Na rys 1.34 przedstawiono ten sam układ hydrau-liczny w strukturze obiektowej i schematycznej.
Najczęściej stosowanym czynnikiem roboczym, stosowanym w układach hydraulicznych, są oleje mineralne, choć coraz częściej wypierane są prze oleje syntetyczne. Oleje hydrauliczne spełnią wymagania stawiane czynnikom robo-czym, tj. dobre właściwości smarne, dopuszczalne zmiany lepkości w zakre-sie temperatury roboczej, antykorozyjność, stosunkowo powolne starzenie się, odporność na pienienie.
Istotnym elementem układu hydraulicznego jest napędzana silnikiem elek-trycznym pompa wyporowa, pompująca ciecz roboczą ze zbiornika do układu hydraulicznego. Dokonuje ona konwersji energii mechanicznej dostarczo-nej z zewnątrz na energię ciśnienia cieczy roboczej. Pompy można podzielić, ze względu na rodzaj ruchu elementów wyporowych, na rotacyjne (rys. 1.35) lub wielotłoczkowe. Charakterystycznym parametrem pomp jest ich stała lub nastawna wydajność, która może być ustalana przez zmianę prędkości napędzają-cego je silnika elektrycznego. Zdarza się, że pompa ma więcej niż jeden niezależny strumień cieczy roboczej, co jest istotne przy zasilaniu większej liczby układów hydraulicznych.

44
Rys. 1.35. Elementy składowe rotacyjnej zębatej pompy oleju.
Ciecz robocza przesyłana w instalacji przepływa przez zawór przelewowy, który reguluje ciśnienie w systemie przez umożliwienie powrotu nadmiaru cie-czy roboczej do zbiornika w chwili, gdy zostanie osiągnięte określone ciśnienie graniczne zaworu. Nadmiar cieczy jest przesyłany z powrotem do zbiornika przez przewód zwrotny, który jest często połączony z dodatkowym wymiennikiem cie-pła wykorzystywanym do regulacji temperatury oleju.
Zawory rozdzielające (rozdzielacze) (rys. 1.36) to elementy elektrohydrau-liczne działające jak przetwornik o dużym wzmocnieniu. Zewnętrznym sygnałem sterującym jest napięcie lub prąd elektryczny, natomiast wyjściowym jest zmienny przepływ cieczy roboczej w wybranej gałęzi układu hydraulicznego.
Rozdzielacz jest zbudowany z ruchomego suwaka z dołączonymi do niego tłoczkami. Porusza się w cylindrycznym korpusie. Tłoczki są ustawione w szcze-linie wewnątrz cylindra tak, że ruch tłoka stopniowo zmienia rozmiar szczelin i zmienia różnicę przepływu oleju pomiędzy dwoma sterowanymi przyłączami.
Rys. 1.36. Widok rozdzielacza elekromagnetycznego trójdrożnego zabudowanego na siłowniku dwustronnego działania.
Pilot
Płyta czołowa
Koło zębate bierne
Koło zębate czynne
Korpus łożyskaKorpus pompy
Przyłącze hydrauliczne
Pokrywa

45
Hydrauliczne elementy wykonawcze to urządzenia przetwarzające energię hydrauliczną na ruch lub siłę. Podzespoły wykonawcze podzielić można na wyko-nujące ruch liniowy (siłowniki liniowe) oraz obrotowy (siłowniki i silniki obro-towe).
W przypadku silników obrotowych działanie jest odwrotne do działania pompy wyporowej – następuje tu zamiana energii ciśnienia cieczy roboczej na energię mechaniczną. Po przekazaniu energii elementom wyporowym silnika ciecz jest przesyłana do zbiornika. Najważniejsze kryteria podziału silników wie-loobrotowych to możliwe do uzyskania prędkości i momenty obrotowe.
Pierwszą istotną grupą są silniki szybkoobrotowe niskomomentowe (300 do 3000 obr/ min). Drugą grupą są silniki wolnoobrotowe (1 do 300 obr/min.) wysokomomentowe, których zaletą jest możliwość bezpośredniego sprzęgnięcia z wałem maszyny bez potrzeby stosowania dodatkowych przekładni zmniejszają-cych prędkość obrotową.
Elementy wykonawcze o ruchu liniowym (siłowniki) mogą być dzielone na siłowniki jednostronnego działania – mające tylko jedną komorę roboczą, oraz dwustronnego działania – z dwiema lub większą liczbą komór roboczych. W siłownikach jednostronnego działania wykonywany jest ruch roboczy w jed-nym kierunku (tzw. wysuw) w wyniku działania cieczy pod ciśnieniem wypełnia-jącej komorę siłownika. Powrót tłoka zachodzi pod wpływem siły ciężkości lub siły sprężyny. W siłownikach dwustronnego działania (rys. 1.37) ruch roboczy zachodzi pod wpływem działania cieczy w dwóch komorach.
Rys. 1.37. Widok przekroju siłownika hydraulicznego dwustronnego działania.
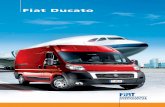
W napędach hydraulicznych stosowane są przewody sztywne – rury (np. rury stalowe bez szwów) lub przewody giętkie – węże (rys. 1.38), stosowane głównie dla przewodzenia cieczy pomiędzy punktami będącymi w ruchu. Zarówno węże, jak i rury mogą być nisko, średnio i wysoko ciśnieniowe.

46
Rys. 1.38. Elastyczne przewody giętkie stosowane w instalacja hydraulicznych.
1.8. Układy pneumatyczne
Napęd pneumatyczny jest to napęd mechanizmów maszyn i urządzeń przy wykorzystaniu energii sprężonego gazu – zazwyczaj powietrzem.
Napędy pneumatyczne najczęściej stosuje się w maszynach i urządzeniach technologicznych, głównie do realizacji przesuwów mechanizmów oraz wywoły-wania określonego nacisku statycznego. Urządzenia pneumatyczne wykorzystuje się do: • napęduurządzeńtransportowych–podnośników,podajnikówitp.,• zamykaniaokien,drzwi,zasuwitp.,• napęduurządzeńhamulcowychwmotoryzacjiikolejnictwie,• napędunarzędziręcznychwirującychiudarowych,• napęduurządzeńodłączającychnastacjachwysokiegonapięcia,• napędudużychzaworówregulacyjnychwprzemyślechemicznymiprzetwór-
czym.Napęd pneumatyczny odbywa się za pomocą siłowników pneumatycz-
nych o ruchu posuwisto-zwrotnym lub za pomocą silników pneumatycznych, w wyniku czego uzyskuje się ruch obrotowy wirnika silnika pneumatycznego.
W przemyśle najczęściej wykorzystywane są układy napędowe mieszane pneumohydrauliczne, tj. takie, w których sprężone powietrze jest czynnikiem napędowym, natomiast olej jest czynnikiem pomocniczym umożliwiającym np. uzyskanie bezstopniowego nastawiania niewielkich prędkości ruchu tłoków lub też przenoszącym wysokie ciśnienie robocze.
Źródłem energii w układach pneumatycznych jest sprężone powietrze, które jest wytwarzane w sprężarkach stacjonarnych lub ruchomych. Napęd spręża-rek jest realizowany silnikiem elektrycznym lub spalinowym. Możliwość prze-

47
wodowego transportu powietrza jest ograniczona na ogół do około 1000 m ze względu na spadek ciśnienia. Istnieje natomiast możliwość łatwego magazyno-wania dużych ilości powietrza w zbiornikach stałych lub ruchomych. W instala-cjach pneumatycznych poszczególne elementy wykonawcze instalacji łączone są za pomocą przewodów sztywnych – rury (np. rury stalowe bez szwów) lub prze-wodów giętkich – węży, najczęściej wykonanych z poliuretanu.
Uzyskiwana siła w elementach napędowych mieści się w zakresie do 30 kN, przy stosunkowo małym poborze mocy, gdyż stosowane ciśnienie powietrza zwykle nie przekracza 1,5 MPa. W układach pneumatycznych sterowalność siły można w łatwy sposób uzyskać przez sterowanie ciśnieniem, natomiast sterowa-nie prędkości przez dławienie strumienia sprężonego powietrza doprowadzanego lub odprowadzanego z odbiornika. Czynnik roboczy, jakim jest sprężone powie-trze, jest praktycznie nieczuły na wahania temperatury otoczenia, samo zaś nie wpływa szkodliwie na otoczenie. Istotną zaletą napędu pneumatycznego jest rów-nież to, że może on być stosowany w pomieszczeniach, w których możliwy jest samozapłon. Pewną uciążliwością jest hałas powstający przy wypływie powietrza do otoczenia, lecz można go w znacznym stopniu wyeliminować, stosując odpo-wiednie tłumiki.
Instalacja pneumatyczna składa się w zasadzie z takich samych elementów składowych, jak instalacja hydrauliczna. Różnica polega głownie na drobnych rozwiązaniach konstrukcyjnych elementów roboczych i wykonawczych (pompy, rozdzielaczy, siłowników, itd.), spowodowanych różną gęstością i lepkością czyn-nika roboczego.
1.9. Silniki cieplne
Silnik cieplny jest to urządzenie (maszyna cieplna), które zamienia energię termiczną (cieplną) w energię mechaniczną (pracę).
Ze względu na rodzaj czynnika zasilającego, silniki cieplne dzieli się na: 1. silniki spalinowe,2. silniki parowe.
Ze względu na sposób wykorzystania energii czynnika silniki dzieli się na:1. silniki tłokowe,2. silniki turbinowe,3. silniki odrzutowe.
Silnik parowy jest to silnik cieplny, który zamienia energię pary wodnej na energię mechaniczną. Silnik parowy tłokowy dokonuje zamiany energii ciepl-nej pary na pracę mechaniczną przez bezpośrednie działanie pary na tłok sil-nika umieszczony w cylindrze. Prostoliniowy ruch tłoka zamieniany jest na ruch obrotowy wału za pośrednictwem mechanizmu korbowego. Silnik parowy

48
wirnikowy dokonuje zamiany energii pary pośrednio, zamieniając ją najpierw w energię kinetyczną, która z kolei zamienia się na pracę mechaniczną, przy czym uzyskujemy od razy ruch obrotowy wału.
Zasada działania silnika spalinowego – tłokowego. W spalinowych silnikach tłokowych stosowany jest najczęściej posuwisto-zwrotny ruch tłoka. Przesunię-cie tłoka pomiędzy dwoma kolejnymi położeniami zwrotnymi tłoka nazywa się suwem tłoka. W zależności od liczby suwów tłoka, po wykonaniu których zja-wiska w silniku powtarzają się, rozróżnia się silniki czterosuwowe i dwusuwowe. W doświadczalnych silnikach zastosowano obrotowy ruch tłoka (silnik Wankla).
Do cylindra silnika może być doprowadzana uprzednio przygotowana mie-szaka palna z powietrza i paliwa ciekłego w gaźniku (silniki gaźnikowe) lub powietrza i paliwa gazowego w mieszalniku (silniki gazowe – np. LPG). W silni-kach z układem wtryskowym następuje wtrysk paliwa do kolektora ssącego (np. układ zasilania typu MPI) lub bezpośrednio do cylindra zarówno benzyny, jak i oleju napędowego (układ zasilania typu FSI – silniki „benzynowe”, TDI, CDR – silniki wysokoprężne (tzw. Diesel)).
Zapłon mieszanki paliwa z powietrzem może być spowodowany iskrą elek-tryczną (silniki o zapłonie iskrowym) lub też może następować samoczynnie na skutek nagrzania powietrza podczas sprężania powyżej temperatury samozapłonu paliwa (silniki o zapłonie samoczynnym – silnik wysokoprężny).
Silnik spalinowy – turbinowy ma przynajmniej jedną turbinę wykonującą pracę użyteczną, zwaną turbiną napędową. Najczęściej silnik spalinowy – tur-binowy jest silnikiem o spalaniu wewnętrznym. Do silnika zasysane jest powie-trze z otoczenia. Spaliny o temperaturze i ciśnieniu wyższych od ciśnienia i tem-peratury otoczenia wytwarzane są zazwyczaj w wirnikowej, rzadziej w tłokowej wytwornicy spalin.
W pierwszym przypadku powietrze sprężane jest w sprężarce wirnikowej. Sprężone powietrze przepływa przez komorę spalania, do której wtryskiwane jest przez wtryskiwacz paliwo. Po rozprężeniu w jednej lub kilku turbinach do ciśnienia otoczenia spaliny usuwane są z silnika. W silnikach dużych mocy stoso-wane są sprężarki i turbiny osiowe. W silnikach małych mocy stosowane są sprę-żarki promieniste oraz turbiny osiowe i promieniowe. W silnikach turbinowych bez odzyskiwania ciepła ze spalin temperatura czynnika przepływającego między sprężarką a turbiną wzrasta tylko na skutek spalania paliwa w komorze spalania. W silnikach turbinowych z odzyskiwaniem ciepła ze spalin temperatura czyn-nika ze sprężarką wzrasta początkowo w wymienniku ciepła, na skutek ogrzewa-nia powietrza wypływającego ze sprężarki spalinami wypływającymi z turbiny, a następnie na skutek spalania paliwa w komorze spalania. Odzyskiwanie ciepła ze spalin zwiększa sprawność silnika.
Silniki odrzutowe napędzają samoloty lub pociski rakietowe przez bezpo-średnie wykorzystanie siły reakcji strumienia spalin wypływających z dużą pręd-

49
kością z dyszy silnika. Siła ta nazywana jest ciągiem silnika. Silniki odrzutowe przelotowe pobierają tlen potrzebny do spalania z powietrza atmosferycznego dopływającego do silnika. Powietrze dopływające do silnika jest sprężane adiaba-tycznie w części wlotowej silnika, ukształtowanej jako dyfuzor, na skutek zmniej-szenia prędkości przepływu (obieg Braytona). W silnikach przelotowych sprężar-kowych powietrze jest sprężane dalej adiabatycznie w sprężarce osiowej lub pro-mienistej, po czym przepływa do komory spalania. Proces spalania w komorze spalania przebiega prawie izobarycznie (35% spadek ciśnienia). Temperatura spa-lin przed turbiną nie może przekraczać 1200°K przy obecnie stosowanych mate-riałach na łopatki turbin.
Działanie silnika czterosuwowego o zapłonie iskrowymW silnikach spalinowych tłokowych ruch tłoka jest wywołany gwałtownym
spalaniem się mieszanki paliwa z powietrzem wewnątrz cylindrów. Ruch tłoka odbywa się w czterech kolejnych suwach, co odpowiada 2 obrotom wału korbo-wego. Zapłon palnej mieszanki następujący od iskry elektrycznej między elek-trodami świecy zapłonowej wywołuje odepchnięcie tłoków w dół i obracanie się wału korbowego. Mechanizm korbowy zmienia posuwisto-zwrotny ruch tłoka na ruch obrotowy wału korbowego. Wał ten przekazuje wytworzoną moc poprzez pasek zębaty na wałek rozrządu. Wałek rozrządu harmonizuje otwieranie zawo-rów (powodując wlot mieszanki i wylot gazów spalinowych), dzięki czemu spa-lanie mieszanki w poszczególnych cylindrach następuje cyklicznie. Obieg pracy w czterech kolejnych suwach opisano poniżej: • suw I (ssanie) – tłok przesuwa się w dół, zawórwlotowy otwiera się,mie-
szanka zostaje zassana do cylindra silnika,• suw II (sprężanie) – tłok porusza się ku górze, zawórwlotowy zamyka się,
mieszanka jest sprężana, tuż przed górnym położeniem tłoka następuje zapłon mieszanki za pomocą iskry elektrycznej pojawiającej się na elektro-dach świecy zapłonowej,
• suw III (praca) – iskra elektryczna świecy zapala sprężoną mieszankę,powstałe gazy rozprężając się pchają tłok w dół; osadzone na korbowodzie koło zamachowe magazynuje energię uwolnioną w tym suwie, powodując, że nie zwalnia on swojego ruchu,
• suwIV(wydech)–zawórwylotowyotwierasię;tłokprzesuwasiękugórze,wypychając gazy spalinowe z cylindra. Graficzną interpretacją przedstawionych procesów wraz z wyróżnioną
budową silnika przedstawiono na rys 1.39.

50
Rys. 1.39. Budowa i istota funkcjonowania silnika czterosuwowego o zapłonie iskrowym.
Jako paliwo do zasilania tłokowych silników spalinowych stosowanie są pochodne ropy naftowej: etylina, olej napędowy, LPG (Liqid Petroleum Gas – skroplony gaz ropopochodny), a także CNG (Compressed Natural Gas – gaz ziemny), oleje roślinne i alkohole (metanol, etanol).
Przez prawie 150 lat historii motoryzacji w silnikach wykorzystujących wyżej opisaną zasadę przemiany energii wyodrębniło się kilka rodzajów, zróżnicowa-nych pod względem zasady inicjowania reakcji spalania i rozwiązań konstrukcyj-nych budowy.
Ze względu na zasadę zapłonu wyróżniamy:• silnikiozapłonieiskrowym,• silnikiozapłoniesamoczynnym.
W silnikach o zapłonie iskrowym (ZI), zwanych również benzynowymi, nisko-prężnymi lub silnikami Otta, zapłon realizowany jest za pomocą iskry wywoływa-nej na świecy zapłonowej przez impuls elektryczny. Jest to najstarsze i najprostsze rozwiązanie. Jako paliwa stosuje się tutaj etyliny i paliwa gazowe.
Nieco bardziej skomplikowane jest działanie silników o zapłonie samo-czynnym (ZS). Tutaj w fazie ssania do komory spalania dostarczane jest jedynie powietrze. Następnie wraz ze wzrostem ciśnienia podczas sprężania gwałtownie rośnie jego temperatura, zwykle do około 700 °C. Dopiero wtedy wtryskiwane jest paliwo, które w atmosferze gorącego, sprężonego powietrza zapala się samo-czynnie. Silniki tego typu są również nazywane wysokoprężnymi lub Diesla, jako paliwa potrzebują oleju napędowego lub olejów roślinnych.

51
1.10. Pompy
Pompami nazywamy urządzenia służące do podnoszenia cieczy z poziomu niższego na poziom wyższy lub też do przetłaczania z przestrzeni o ciśnieniu niż-szym do przestrzeni o ciśnieniu wyższym. Działanie pompy opiera się na wytwo-rzeniu różnicy ciśnień pomiędzy stroną ssącą (ssawną) a tłoczącą (tłoczną) ele-mentu roboczego pompy w postaci tłoka, wirnika przepony itp.
W zależności od sposobu wytworzenia różnicy ciśnień między stroną ssawną a tłoczną dzielimy najczęściej spotykane w praktyce pompy na:• pompy o zasysaniu dawkowym (przerywanym), które nazywa się również
pompami wyporowymi,• pompyozasysaniuciągłym,którenazywasiępompamiwirowymi.
Pompy wyporowe, czyli pompy o zasysaniu dawkowym, są to pompy, których zasada działania opiera się na zasysaniu w sposób przerywany określonej dawki (ilości) cieczy z przestrzeniu ssawnej i wtłoczeniu jej do przestrzeni tłocznej.
Pompy wyporowe dzieli się na: • pompyoposuwisto-zwrotnymruchuorganuroboczego(np.pompytłokowe
lub nurnikowe),• pompy o obrotowo-zwrotnym ruchu organu roboczego (pompy skrzydeł-
kowe),• pompaoobrotowymruchuorganuroboczego(np.pompazębata).
Pompy wirowe, czyli pompy o zasysaniu ciągłym, posiadają organ roboczy w postaci odpowiednio ukształtowanego wirnika, który obracając się powoduje zwiększenie w sposób ciągły objętości przepływającego przezeń cieczy i w ten sposób wywołuje zjawisko zasysania nieprzerwanego (ciągłego) (rys. 1.40).
Rys. 1.40. Istota funkcjonowania pompy wyporowej typu FIT (opis w tekście).
Łopatki elastycznego wirnika, opuszczając obszar krzywizny przewężenia komory pompy, prostują się, powiększając objętość luki międzyłopatkowej. Dzięki temu powstaje podciśnienie i następuje zasysanie cieczy do pompy.
Obracający się wirnik transportuje czynnik od strony ssawnej do strony tłocz-nej. W czasie obrotu wirnika ilość cieczy pomiędzy łopatkami pozostaje stała.

52
Dzięki swojej konstrukcji pompy z elastycznym wirnikiem mogą przenosić sto-sunkowo duże zanieczyszczenia stałe.
W momencie gdy łopatki elastycznego wirnika ponownie wchodzą w obszar krzywizny, zginają się, powodując wypieranie cieczy z przestrzeni miedzyłopatko-wej.
W zależności od kształtu wirnika pompy wirowe dzielimy na:• pompyoprzepływiepromieniowym(odśrodkowe),• pompyoprzepływiepromieniowo-osiowym,• pompyoprzepływieosiowym(śmigłowe).
Wielkościami charakteryzującymi pompy w toku eksploatacji są: wydajność, moc, wysokość pompowania i jej charakterystyka.
1.11. Sprężarki i wentylatory
Sprężarkami nazywamy urządzenie służące do sprężania gazu od ciśnienia ssania do wyższego ciśnienia tłoczenia. Wielkość charakteryzująca pracę sprę-żarki, wyrażająca się w stosunku ciśnienia tłocznego do ciśnienia ssawnego, to spręż (stosunek sprężania).
W zależności od wielkości przyrostu ciśnienia gazu sprężonego sprężarki dzielimy na [6]:• wentylatory–sprężdo0,01MPa,• dmuchawy–spręż0,01÷0,2MPa,• sprężarki–sprężod0,2÷100MPadlasprężarekprzemysłowych.
Wentylatory i dmuchawy służą do wysysania gazu przy ciśnieniu nieco niż-szym niż ciśnienia atmosferyczne i sprężają go do ciśnienia atmosferycznego lub niewiele wyższego.
Pompy próżniowe stanowią oddzielną grupę sprężarek. Służą one do wytwo-rzenia ciśnienia mniejszego niż atmosferyczne, czyli tzw. próżni.
W zależności od sposobu sprężania medium rozróżniamy sprężarki: wypo-rowe i wirowe.
Sprężarki wyporowe – działanie ich polega na zassaniu dawki gazu na sku-tek powiększenia objętości komory roboczej, a następnie sprężeniu i wyparciu tej dawki dzięki zmniejszeniu objętości komory. Zmiany objętości komory są wywo-ływane ruchem organu roboczego (tłoka, wirnika łopatkowego itd.).
Sprężarki wyporowe dzielimy na: tłokowe o posuwisto-zwrotnym ruchu tłoka oraz rotacyjne o ruchu obrotowym organu roboczego (łopatkowe, śrubowe itd.).

53
Rys. 1.41. Budowa ogólna rotacyjnej łopatkowej sprężarki wyporowej.
Sprężarki wirowe (rys. 1.42) – głównym ich organem roboczym jest obra-cający się z dużą prędkością wirnik łopatkowy. W czasie przepływu gazu przez wirnik zachodzi wzrost jego energii ciśnienia i prędkości. Dalszy wzrost ciśnienia następuje w osłonie sprężarki na skutek zmniejszenia prędkości gazu.
Rys. 1.42. Sprężarka wirowa turbinowa (promieniowo-osiowa) napędzana turbiną przez gazy spalinowe.
Sprężarki wirowe budowane są jako jedno i wielostopniowe. Dzieli się je na promieniowe i osiowe.
Wentylatory – zasada działania wentylatorów jest taka sama jak pomp wiro-wych. Przepływ gazu przez wirnik jest naporem łopatek obracającego się wirnika, przy czym następuje przeniesienie energii silnika na przepływający gaz.
W wentylatorze o przepływie osiowym (tzw. osiowych) podczas przepływu przez wirnik zachodzi głównie przyrost energii kinetycznej gazu, a w wentylato-rach o przepływie promieniowym (tzw. promieniowych) na skutek działania siły odśrodkowej wzrasta również energia ciśnienia.

54
a) b)
Rys. 1.43. Widok ogólny wentylatora osiowego – a) i promieniowego – b).
Następujące wielkości charakteryzują funkcjonowanie sprężarki i wentylato-rów: wydajność, ciśnienie ssania i tłoczenia, temperatura ssania i tłoczenia czyn-nika, prędkość obrotowa, zapotrzebowania mocy itp.
1.12. Silnik elektryczny
Silnik elektryczny to maszyna przetwarzająca energię elektryczną na ener-gię mechaniczną, zwykle w postaci energii ruchu obrotowego. Moment obrotowy powstaje w silniku elektrycznym w wyniku oddziaływania pola magnetycznego i prądu elektrycznego (siła elektrodynamiczna) [7].
Ze względu na rodzaj napięcia zasilającego, silniki elektryczne dzielimy na: • silnikielektryczneprądustałego,• silnikielektryczneprąduzmiennego,• silnikiuniwersalne.
Silnik elektryczny składa się z (rys. 1.44): – szczotek – które dostarczają prąd do silnika,– komutatorów – które zmieniają kierunek prądu w ramce,– magnesów – które wytwarzają pole magnetyczne niezbędne do wprawie-
nia ramki w ruch,– wirnika (ramki) – dzięki dostarczeniu prądu to właśnie ta część silnika
jest wprawiana w ruch.

55
Rys. 1.44. Budowa silnika elektrycznego z wyróżnieniem jego głowach elementów [7].
Zasada działania silnika elektrycznego jest następująca: wirnik obraca się dzięki temu, że uzwojenia przewodzące prąd umieszczone są w polu magnetycz-nym. Te dwa pola kolidują ze sobą, powodując ruch wirnika (ramki) – rys. 1.45-1. Komutatory poprzez szybką zmianę kierunku przepływu prądu przez ramkę powodują dalszy obrót – rys. 1.45-2 (gdyby nie komutatory, to ramka ciągle powracałaby do pozycji początkowej, a właśnie komutatory powodują jej dalszy obrót w jedną stronę). Po tym proces zaczyna się od początku i cykl rozpoczyna się na nowo. Zobrazowano to na rys. 1.45.
Rys. 1.45. Istota funkcjonowania silnika elektrycznego (opis w tekście).

56
Silnik elektryczny prądu stałego ma na osi wirnika pierścień złożony z izo-lowanych działek (tzw. komutator), łączonych z zaciskami uzwojeń twornika. Po komutatorze ślizgają się doprowadzające prąd, nieruchomo osadzone, szczotki elek-tryczne (wykonane z drobnoziarnistych tworzyw z węgla uszlachetnionego), doci-skane do powierzchni komutatora przez sprężyny. Zależnie od sposobu połączenia uzwojenia twornika z uzwojeniem elektromagnesu wzbudzającego pole magne-tyczne, silniki elektryczne prądu stałego dzieli się na szeregowe, równoległe i sze-regowo-równoległe. W silnikach elektrycznych szeregowych prędkość obrotowa zmniejsza się wraz ze wzrostem obciążenia; mają skłonność do „rozbiegania się” po odłączeniu obciążenia; są stosowane w trakcji elektrycznej i dźwignicach. W sil-nikach elektrycznych równoległych prędkość obrotowa jest niezależna od obciąże-nia; są stosowane np. do napędzania obrabiarek. Silniki elektryczne szeregowo-rów-noległe są stosowane do napędzania maszyn o stałej prędkości obrotowej i dużych momentach obrotowych.
Silniki prądu przemiennego dzielą się na 1- i 3-fazowe, a zależnie od zasady działania na: indukcyjne (indukcyjna maszyna), synchroniczne (synchroniczna maszyna) i komutatorowe (komutatorowa maszyna). W silnikach elektrycznych 3-fazowych indukcyjnych prąd 3-fazowy płynący przez uzwojenia stojana wytwa-rza pole wirujące; pole to przecina przewody uzwojenia wirnika, indukując w nich prądy zgodnie z regułą Lenza, a w rezultacie powoduje ruch obrotowy wirnika. Wirnik obraca się wolniej niż pole wirujące, gdyż w uzwojeniach wirnika indukuje się napięcie tylko wtedy, kiedy istnieje ruch pola wirującego względem tych uzwo-jeń. Różnica prędkości nazywa się poślizgiem. Silniki elektryczne indukcyjne sto-sowane są do napędzania maszyn o nieregulowanej prędkości obrotowej.
Najtańsze i najczęściej stosowane w przemyśle są odznaczające się najprostszą budową silniki indukcyjne klatkowe (zwarte); wirnik tych silników ma uzwojenie w kształcie klatki, wykonanej jako odlew aluminiowy lub zespół prętów zwartych na swych czołach pierścieniami.
Silniki elektryczne synchroniczne różnią się od silników elektrycznych indukcyj-nych budową wirnika, który jest wyposażony dodatkowo w elektromagnesy zasilane prądem stałym ze wzbudnicy osadzonej na wale wirnika. Liczba biegunów elektroma-gnesów odpowiada liczbie biegunów pola wirującego stojana. Ponieważ moment obro-towy jest wynikiem wzajemnego oddziaływania na siebie biegunów magnetycznych elektromagnesów i pola wirującego, obroty wirnika są synchroniczne z obrotami pola i mają stałą prędkość; stosowane do napędzania maszyn szybkoobrotowych o stałej prędkości obrotowej, np. sprężarek. Silniki elektryczne synchroniczne mogą być stoso-wane jako silniki skokowe (krokowe, impulsowe); impulsowe zasilanie powoduje niecią-gły, skokowy ruch wirnika (obrót) silnika o określony kąt (zwykle od kilku do kilkudzie-sięciu stopni). Silnik taki wykonuje do kilku tysięcy skoków na sekundę i jest stosowany w układach regulacji automatycznej z cyfrowym sygnałem sterującym, w zegarach (jako siłownik precyzyjny), do ustawiania głowic w pamięciach dyskowych komputerów itp.

57
Silniki elektryczne komutatorowe (szeregowe i równoległe), podobnie jak silniki elektryczne prądu stałego, mają wirnik z komutatorem, do którego doprowadza się prąd przemienny za pomocą szczotek. Osobną grupę stanowią silniki elektryczne uniwersalne, które mogą być zasilane prądem stałym lub przemiennym; stosowane do napędzania sprzętu gospodarstwa domowego, maszyn biurowych itp.
Odrębnym rodzajem silnika elektrycznego jest silnik liniowy, przetwarzający energię elektryczną bezpośrednio na energię ruchu postępowego. Silnik liniowy składa się z induktora i bieżnika, które są odpowiednikami stojana i wirnika zwy-kłego silnika elektrycznego, lecz rozwiniętymi w linię prostą; częścią ruchomą sil-nika może być zarówno induktor, jak i bieżnik. Głównymi zaletami tego rodzaju silnika są: brak styczności mechanicznej między induktorem a bieżnikiem, ide-alnie cicha praca, dobre chłodzenie, brak ślizgowych zestyków doprowadzają-cych prąd, łatwość sterowania, możliwość uzyskiwania różnych przebiegów zależ-ności siły od prędkości, możliwość prostego łączenia kilku silników liniowych w jeden zespół o większej mocy. Rozróżnia się silniki elektryczne liniowe prądu stałego, prądu przemiennego, synchroniczne, asynchroniczne, oscylacyjne itp. Do najnowszych konstrukcji należą silniki o poprzecznym strumieniu magnetycz-nym (tzw. transverse-flux motor) nadające się zwłaszcza do napędzania szybkich pojazdów poruszających się na poduszce powietrznej lub magnetycznej. Silniki elektryczne liniowe stosuje się głównie w automatyce, w napędach specjalnych oraz w trakcji elektrycznej.
Silnik uniwersalny jest to silnik elektryczny szeregowy komutatorowy 1-fazowy dostosowany do zasilania zarówno prądem przemiennym, jak i stałym, stosowany m.in. w sprzęcie gospodarstwa domowego (np. odkurzaczach, mikse-rach, suszarkach do włosów).
Współczesne silniki elektryczne mają moc od części wata do kilkudziesięciu megawatów, przy sprawności od 60 do 95%, współczynnik mocy silnika elektrycz-nego prądu przemiennego wynosi 0,65÷0,95.
1.13. Budowa pojazdu samochodowego
Pojazd samochodowy stanowi określoną całość konstrukcyjną, w skład której wchodzi kilka lub kilkanaście tysięcy części składowych. Każda z tych części speł-nia ściśle określone zadanie. Odpowiednie zestawy tych części tworzą poszcze-gólne człony konstrukcyjne pojazdu, spośród których rozróżnia się zespoły, pod-zespoły, układy, instalacje oraz osprzęt.
Ogólny układ konstrukcyjny i szczegóły budowy zespołów, podzespo-łów, mechanizmów, instalacji i osprzętu zależą od wielu czynników. Najbardziej istotne są przeznaczenie i przewidywane warunki użytkowania pojazdu samocho-dowego. Stosownie do tych czynników dobierane są główne parametry pojazdu,

58
typ i rodzaj nadwozia, odpowiednie mechanizmy podwozia oraz charakterystyka ruchowa pojazdu.
Różnorodność zadań w dziedzinie transportu oraz stale zwiększający się zakres wymagań spowodowały szybki rozwój licznych odmian pojazdów samo-chodowych. Dotyczy to nie tylko bardzo wyraźnego podziału ze względu na prze-znaczenie, np. samochody osobowe i ciężarowe, lecz również powstania wielkiej liczby modeli w ramach jednej grupy pojazdów. Dzięki temu np. rozpowszech-niają się coraz bardziej samochody specjalizowane, dostosowane do przewozu ści-śle określonego ładunku. Każda jednak grupa lub kategoria pojazdów odznacza się pewnymi wspólnymi charakterystycznymi cechami budowy, które wynikają z przeznaczenia pojazdu. Na przykład samochody osobowe odznaczają się lek-kością konstrukcji, estetyką wykonania, znaczną prędkością i komfortem jazdy. Samochody ciężarowe odznaczają się przede wszystkim prostotą budowy, dużą wytrzymałością i niezawodnością działania.
Przemysł samochodowy jest jedną z młodszych gałęzi przemysłu, jednak odznacza się wielką dynamiką rozwoju ilościowego i jakościowego. Szybko rozwi-jający się nowoczesny przemysł samochodowy, wprowadzając coraz nowsze i bar-dziej doskonałe rozwiązania konstrukcyjne w oparciu o nowoczesną technologię produkcji i organizację pracy, spowodował również ogromny postęp w innych, pokrewnych gałęziach przemysłu. Poszczególne elementy i osprzęt pomocniczy samochodów przechodzą nieustanną ewolucję, są wciąż udoskonalane. Głównym kierunkiem tych zmian jest polepszenie warunków pracy kierowcy (automatyza-cja działania mechanizmów napędowych, urządzenia wspomagające), zwiększe-nie bezpieczeństwa jazdy (zwiększenie trwałości i niezawodności działania, ukła-dów kierowniczych, elementów zawieszenia, ogumienia i kół), zmniejszenie cię-żaru własnego pojazdu lub zwiększenie jego ładowności, zwiększenie przyspie-szeń oraz średniej prędkości ruchu kosztem możliwie niskiego zużycia paliwa itp.
Najbardziej istotne wymagania stawiane nowoczesnym samochodom, jak bezpieczeństwo i wygoda jazdy oraz możliwie największa przestrzeń użyteczna w nadwoziu, w poważnej mierze uwarunkowane są ogólną koncepcją konstruk-cyjną układu napędowego. Same rozwiązania konstrukcyjne są dziś na ogół typowe, a o układzie decyduje jedynie usytuowanie silnika i położenie mostu napędowego. Na rys. 1.46 przedstawiono ogólną budowę pojazdu samochodo-wego wraz z wyróżnieniem wybranych układów i zespołów.
Pojazd samochodowy składa się ogólnie z podwozia (co będzie przedstawione szerzej w dalszej części opracowania) oraz nadwozia – stanowiącego zewnętrzną „powłokę” pojazdu zarówno w aspekcie bezpieczeństwa użytkowania, jak i uży-teczności eksploatacyjnej i estetyki.
Podwozia pojazdów samochodowych mają bardzo zróżnicowaną budowę, co wynika przede wszystkim z faktu, że zawierają w sobie bardzo wiele podzespo-łów, pełniących różne zadania i funkcje. Podzespoły te mogą różnić się budową,

59
Silnik z osprzętem
Amortyzator ze sprężyną przedni
Kolumna kierownicza
Zawieszenie tylne
Most napędowy z przekładnią główną
Wał napędowy
Zbiornik paliwa
Amortyzator tyny
AkumulatorNadwozie samonośne
Pompa hamulcowa
Tarcza hamulcowa
zasadą działania, a także umiejscowieniem w pojeździe. Podwozie może być rów-nież wyposażone w dodatkowe mechanizmy.
Rys. 1.46. Budowa ogólna pojazdu samochodowego z wyróżnieniem wybranych elemen-tów.
Niezależnie od tego w każdym podwoziu możemy wyróżnić pewne elementy wspólne. Są to: • zawieszenie, do którego zaliczamy wszystkie elementy łączące koło samo-
chodu z podwoziem (lub nadwoziem); zadaniem zawieszenia pojazdu jest nie tylko zapewnienie komfortu jazdy, ale także umożliwienie właściwej współ-pracy koła z nawierzchnią drogi w każdych warunkach,
• układ przeniesienia napędu, którego zadaniem jest przeniesienie napędu z silnika na koła napędowe pojazdu; układ przeniesienia napędu wraz z silni-kiem tworzy kolejny, bardzo ważny układ zwany układem napędowym,
• układ hamulcowy, zapewniający skuteczne (czyli względnie szybkie) zatrzy-manie samochodu lub zmniejszenie jego prędkości oraz jego unieruchomie-nie;
• układ kierowniczy, umożliwiający zmianę toru jazdy pojazdu; układ hamul-cowy i kierowniczy często określa się jako mechanizmy prowadzenia pojazdu.Uwzględniając sposób rozmieszczenia poszczególnych elementów układu
napędowego, rozróżniamy następujące układy: klasyczny, przedni zblokowany (zespolony), tylny zespolony, centralny, 4x4.
W układzie klasycznym silnik umieszczony wzdłużnie z przodu pojazdu napędza oś tylną (rys. 1.47).

60
Rys. 1.47. Klasyczny układ napędowy pojazdu samochodowego.
W tym układzie silnik wraz ze sprzęgłem i skrzynką biegów znajduje się z przodu samochodu, a napęd przekazywany jest za pośrednictwem wału napę-dowego do tylnego mostu i na koła napędzane. W samochodach osobowych tego typu układ stosowany jest obecnie dość rzadko, choć istnieją firmy, które do tej pory preferują tego typu napęd (np. BMW).
Układ przedni zblokowany (zespolony) – silnik umieszczony z przodu pojazdu napędza oś przednią (rys. 1.48).
Rys. 1.48. Układ przeniesienia napędu typu przedniego zespolonego.
W układzie przednim zblokowanym najważniejsze elementy układu (silnik, sprzęgło, skrzynka biegów, przekładnia główna i mechanizm różnicowy) stano-wią zwartą całość i umieszczone są w przedniej części pojazdu. Silnik najczęściej umieszczony jest poprzecznie, choć może być również umieszczony wzdłużnie (np. Audi A4). Umieszczenie silnika wzdłużnie wynika z ograniczonej szerokości pojazdu, przy której silniki o dużej liczbie cylindrów po prostu nie mieszczą się poprzecznie. Układ przedni zblokowany (zespolony) zdominował układy napę-dowe samochodów osobowych, zwłaszcza w segmentach samochodów miejskich, kompaktowych i klasy średniej.

61
Układ tylny zespolony – silnik umieszczony z tyłu pojazdu napędza oś tylną rys. 1.49.
Rys. 1.49. Układ przeniesienia napędu typu tylnego zespolonego.
Obecnie układ praktycznie niestosowany, choć pewnie wszystkim Polakom kojarzący się z wyjątkowym samochodem marki Fiat 126p. W tym układzie silnik umieszczony jest z tyłu i zblokowany jest ze skrzynką biegów, przekładnią główną i mechanizmem różnicowym. Może być umieszczony za tylną osią, lub przed – wówczas często układ taki nazywany jest centralnym (patrz następny układ cen-tralny).
Układ centralny – silnik umieszczony z tyłu pojazdu (przed tylną osią) napę-dza oś tylną rys. 1.50.
Rys. 1.50. Układ przeniesienia napędu typu centralnego.
Układ stosowany w samochodach sportowych. Przesunięty przed tylną oś zespół napędowy ogranicza miejsce w kabinie i z tego względu są to z reguły pojazdy dwumiejscowe. Centralne umieszczenie silnika daje lepszy rozkład obcią-żeń na obie osie i korzystne położenie środka masy.
Układ 4x4 – silnik umieszczony wzdłużnie z przodu pojazdu napędza obie osie (rys. 1.51).

62
Rys. 1.51. Układ napędowy typu 4x4.
Napęd stosowany przede wszystkim w samochodach sportowych i tereno-wych. Posiada najlepsze własności ruchowe spośród wszystkich omawianych ukła-dów, jednakże zajmuje najwięcej miejsca, jest najbardziej skomplikowany i kosz-towny. Ogólnie możemy wyróżnić dwie odmiany napędów 4x4 – stały i dołączany. W napędzie stałym napęd przekazywany jest częściowo na oś przednią, a czę-ściowo na tylną (niekoniecznie w proporcji 50/50). W napędzie dołączanym jedna z osi (np. przednia) jest dołączana (automatycznie lub ręcznie) w zależności od warunków drogowych lub woli kierowcy.
Powyższe układy są stosowane w pojazdach wyposażonych w dwie osie. W przypadku pojazdów z trzema i więcej osiami różnorodność rozwiązań kon-strukcyjnych jest szeroka, napędzana oś może być jedna, dwie, trzy i więcej osi.
Układ hybrydowy – to układ napędowy, gdzie współdziałają dwa różne źró-dła energii lub ogólniej różne źródła napędu (rys. 1.52).
Nadwyżka energii generowana przez silnik spalinowy jest wykorzystywana do ładowania akumulatorów (elektrochemicznych, hydraulicznych, mechanicz-nych itp.). Zgromadzona energia jest wykorzystywana w celu pokrycia zapotrze-bowania na energię napędu dodatkowego, współpracującego z głównym źródłem napędu. Zastosowanie tego układu umożliwia użycie silnika spalinowego o mniej-szej mocy, czyli tańszego niż w przypadku klasycznego układu napędowego. Sil-nik spalinowy funkcjonuje w układzie hybrydowym przy większych obciążeniach, dlatego jednostkowe zużycie paliwa jest mniejsze, silnik elektryczny jest wykorzy-stywany w zakresie obciążeń częściowych, np. w ruchu ulicznym, przy których silniki spalinowe wykazują większe zużycie paliwa niż w optymalnych warunkach spalania. Dlatego układ hybrydowy jest jednym z rozwiązań, które może spełnić najostrzejsze wymagania norm toksyczności spalin.

63
Rys. 1.52. Schemat hybrydowego układu napędowego THS – Hybrid Synergy Drive – firmy Toyota [12].
Obecnie eksperymenty z napędami hybrydowymi prowadzone są przez wszystkich liczących się w światowej konkurencji producentów samochodów oso-bowych. Efekty w postaci bardzo zaawansowanych już prototypów i egzemplarzy z próbnej serii można oglądać na międzynarodowych pokazach i targach. Firmy Toyota i Honda uruchomiły już nawet wielkoseryjną produkcję swych hybrydo-wych modeli. Obydwie firmy zmierzają do bardzo zbliżonych rozwiązań. Dlatego konstrukcję modelu Toyota Prius uznać można w znacznym stopniu za typową. Toyota Prius jest pierwszym samochodem seryjnie produkowanym z napędem hybrydowym. Poza hybrydowym układem napędowym pojazd ten nie ma żad-nych istotnych cech odróżniających go od tradycyjnego komfortowego, cztero-drzwiowego samochodu osobowego z pełnym wyposażeniem, służącym czyn-nemu i biernemu bezpieczeństwu jazdy. Przeciętne są też jego osiągi: prędkość max. 160 km/h, przyśpieszenie od 0 do 100 km – 13,4 sekundy. Znacznie niższe od przeciętnego jest natomiast eksploatacyjne zużycie paliwa (5,1 litra na 100 km) i emisja toksycznych składników spalin w przeliczeniu na kilometr trasy testowej (CO-0,63 g, HC-0,05 g, NOx-0,05 g). Spalinowy czterocylindrowy silnik Priusa o pojemności 1500 cm3 rozwija moc 53 kW przy 4500 obr/min. Silnik ten napędza elektrycznie sterowana prądnica, która zależnie od aktualnych potrzeb może słu-żyć do ładowania baterii akumulatorów, zasilania silnika elektrycznego lub jako rozrusznik silnika spalinowego. Silnik o mocy 33 KW i prędkości obrotowej regu-lowanej w zakresie od 400 do 5600 obr/min jest połączony z przekładnią reduk-cyjną i mechanizmem różnicowym z napędzanymi kołami pojazdu. Wspomaga on silnik spalinowy w momentach większego zapotrzebowania mocy bądź zastę-puje całkowicie w warunkach jazdy miejskiej. Elektryczne sprzężenie silnika spa-linowego z kołami pojazdu (przez prądnicę i silnik elektryczny) zastępuje z powo-dzeniem automatyczną bezstopniową skrzynkę przekładniową dzięki elektronicz-nemu sterowaniu i regulacji wszystkich elementów układu napędowego.
Generator
Silnikspalinowy
Mechanizm różnicowy
Akumulator HV
Zespół falownika
Silnik elektryczny
Przekładnia planetarna
Akumulator HV
MG1
MG2
Silnik Inv
PS
12V
Hybrydowy układ napędowy

64
Początkiem układu napędowego jest silnik. Zadaniem silnika jest zamiana pew-nego rodzaju energii, np. energii zawartej w paliwie na energie mechaniczną. Inaczej mówiąc, ma zadanie wytworzenia momentu obrotowego umożliwiającego porusza-nie się pojazdu. Silnik spalinowy cechuje się takimi parametrami, jak: pojemność, moc, moment obrotowy. W skład silnika należy również wliczyć kilka układów, bez których jego funkcjonowanie nie byłoby możliwe. Są to takie układy jak:
Układ chłodzenia – co prawda układ chłodzenia nie należy do elementów, które bezpośrednio wpływają na napęd pojazdów, jednak jest on elementem dość ważnym w budowie samochodu; bez niego niemożliwe byłoby funkcjonowanie silnika pojazdu. Układ chłodzenia ma za zadanie zapewnienie odpowiedniej tem-peratury podczas funkcjonowania silnika. Możemy rozróżnić układ chłodzenia pośredni i bezpośredni.
W bezpośrednim układzie chłodzenia silnik chłodzony jest za pomocą „owiewającego” go strumienia powietrza, którego obieg może byś wymuszony (wentylator) lub samoistny, np. spowodowany ruchem pojazdu. Natomiast w pośrednim układzie chłodzenia silnik chłodzony jest za pomocą cieczy, która chłodzona jest strumieniem powietrza.
Układ smarowania – układ ten również nie jest bezpośrednio odpowie-dzialny za poruszanie się pojazdu, jednak, tak samo jak w przypadku układu chłodzenia, umożliwia pracę silnika. Zadaniem układu smarowania jest dostar-czenie czynnika smarującego (najczęściej oleju) we wszystkie punkty, w których występuje tarcie. Jest do bardzo ważny układ nie tylko dla silnika, lecz również dla skrzyni biegów oraz innych podzespołów.
Układ zapłonowy – jest układem występującym w silnikach spalinowych, odpowiedzialnym za prawidłowy zapłon mieszanki paliwowo-powietrznej lub paliwa oraz za prawidłowy przebieg procesu spalania.
Układ zasilania – jest układem odpowiedzialnym za doprowadzenie czyn-nika zasilającego (paliwa) od zbiornika paliw do jednostki napędowej oraz za zapewnienie odpowiedniej dawki paliwa koniecznej do uzyskania odpowiedniego składu mieszanki paliwowo-powietrznej.
Układ rozrządu – układ ten jest odpowiedzialny za doprowadzenie powie-trza lub mieszanki paliwowo-powietrznej do komory spalania oraz jak najszybsze i prawidłowe odprowadzenie spalin na zewnątrz silnika przez układ wydechowy.
Sprzęgło jest zespołem łączącym wały: napędzający i napędzany (czynny i bierny) w celu przekazywania momentu obrotowego.
W pojazdach samochodowych sprzęgła występują w wielu mechanizmach, jednak najbardziej znanym (bo występującym prawie zawsze) jest sprzęgło główne, będące elementem układu napędowego i znajdujące się pomiędzy silnikiem a skrzynką biegów. Do innych sprzęgieł możemy zaliczyć: sprzęgła wiskotyczne (lepkościowe), Haldex, jednokierunkowe, zębate, kłowe, podatne

65
i wiele innych. Ich zadania są różne, mogą np. włączać napęd 4x4, zabezpieczać układ przed przeciążeniem, napędzając urządzenia dodatkowe itp.
Jako sprzęgła główne stosuje się przede wszystkim sprzęgła cierne tar-czowe. Zdecydowanie rzadziej hydrokinetyczne czy elektromagnetyczne (prosz-kowe). Siłę docisku tarcz sprzęgła konieczną do jego włączenia zapewnia najczę-ściej jedna sprężyna talerzowa lub kilka sprężyn walcowych (w starszych pojaz-dach).
Tarcze sprzęgła mogą funkcjonować również w oleju – wówczas takie sprzę-gła nazywamy mokrymi. Są to najczęściej sprzęgła wielotarczowe (dla odmiany – sprzęgła niefunkcjonujące w oleju nazywamy suchymi).
Siła docisku może być wzmocniona dodatkową siłą odśrodkową poprzez zastosowanie ciężarków umieszczonych na obwodzie tarczy – takie sprzęgła nazy-wamy półodśrodkowymi. Gdy siła docisku zależy tylko od ciężarków, sprzę-gło działa automatycznie (włącza się samoczynnie przy odpowiedniej prędkości wału) i nazywamy je odśrodkowym. Sprzęgła odśrodkowe i półodśrodkowe są praktycznie niestosowane.
Sprzęgła podwójne są jakby połączeniem dwóch sprzęgieł w jednej obudowie. Każde sprzęgło odpowiada za połączenie silnika z innym wałkiem skrzynki bie-gów. Stosowane w różnego typu maszynach, obecnie bardzo popularne w samo-chodach za sprawą skrzynki biegów DSG.
Niezależnie od typu, sprzęgła główne pełnią następujące zadania:– przenoszenie momentu obrotowego z wału korbowego silnika na wałek
skrzynki biegów w pełnym zakresie prędkości obrotowych silnika, – umożliwienie łagodnego, pozbawionego szarpnięć ruszania z miejsca, – ułatwienie szybkiej i niezakłóconej zmiany biegów, – tłumienie drgań w układzie napędowym, – ochrona układu napędowego przed przeciążeniem. Skrzynia biegów jest kolejnym elementem układu napędowego, znajdującym
się za sprzęgłem. Przymocowana jest najczęściej do silnika, tylko w bardzo nie-licznych pojazdach może być oddalona od silnika.
Konieczność stosowania dodatkowych przekładni umieszczonych w obudo-wie skrzynki biegów wynika przede wszystkim z niedoskonałości silnika spalino-wego, który optymalne parametry pracy (dużą moc i wysoki moment obrotowy przy możliwie małym zużyciu paliwa) osiąga przy ściśle określonych zakresach prędkości obrotowych. Ich przekroczenie w najlepszym przypadku może być przyczyną zwiększonego zużycia paliwa, ale może być także przyczyną nadmier-nego hałasu, a nawet przyspieszonego zużycia silnika.
Skrzynia biegów dostarcza na koła napędzane odpowiedni moment napędowy w zależności od warunków ruchu. Podczas ruszania z miejsca czy jazdy pod górę, a także aby zapewnić dobre przyspieszenie, należy „zredukować bieg”, czyli zwięk-szyć przełożenie. Gdy chcemy zwiększyć prędkość jazdy, musimy włączyć „wyższy

66
bieg”, czyli zmniejszyć przełożenie. Skrzynia biegów umożliwia także trwałe rozłą-czenie napędu (tzw. luz) i zmianę kierunku jazdy (bieg wsteczny).
W większości skrzynek biegów stosuje się przekładnie zębate (zwykłe lub pla-netarne), choć spotyka się skrzynki wyposażone w przekładnie hydrokinetyczne i pasowe.
Uwzględniając liczbę możliwych przełożeń (biegów), skrzynki biegów dzie-limy na stopniowe i bezstopniowe. Skrzynie stopniowe mają określoną liczbę przełożeń – w samochodach osobowych najczęściej od 4 do 7, a w samochodach użytkowych nawet 16. Skrzynki bezstopniowe umożliwiają płynną zmianę prze-łożenia pomiędzy wartościami skrajnymi. Bezstopniową zamianę przełożenia umożliwiają przekładnie pasowe i hydrokinetyczne.
Ze względu na sposób sterowania, skrzynki dzielmy na: manualne, półauto-matyczne, automatyczne.
Pierwsze, zwykłe skrzynki biegów były skrzynkami z kołami przesuwnymi, w których włączenie biegu odbywało się poprzez zazębienie ze sobą odpowiedniej pary kół. Współcześnie stosuje się wyłącznie skrzynie z kołami stale zazębionymi, w których włączenie biegu odbywa się poprzez specjalne sprzęgło – synchronizator.
Skrzynki manualne w zależności od typu układu napędowego budowane są jako współosiowe i niewspółosiowe. Współosiowe, zwane trzywałkowymi sto-sowane są układach klasycznych lub 4x4 i charakteryzują się tym, że wałek wyj-ściowy (główny) leży w tej samej osi co wałek wejściowy (sprzęgłowy). Skrzynki niewspółosiowe (dwuwałkowe) stosowane są układach zblokowanych; w tych roz-wiązaniach oś wałka wyjściowego leży poniżej osi wałka wejściowego.
Skrzynki półautomatyczne – powszechnie przyjęło się uważać za tego typu skrzynki układy z automatycznym sprzęgłem – kierowca w celu zmiany przeło-żenia przesuwa w odpowiednią pozycję dźwignię lub łopatki przy kierownicy. Wśród skrzynek automatycznych jest największa różnorodność rozwiązań kon-strukcyjnych. Zaliczamy do nich także skrzynki zautomatyzowane, czyli zwykłe skrzynki wyposażone w układ automatycznego sterowania. Popularnym typem skrzynki automatycznej jest przekładnia zwana hydromechaniczną, będąca połą-czeniem dwóch typów przekładni: hydrokinetycznej i tzw. szeregu planetarnego (czyli kilku sprzężonych ze sobą przekładni planetarnych). Ciekawą konstrukcją jest bezstopniowa przekładnia CVT, w której zastosowano przekładnię pasową. Istnieją także przekładnie bezstopniowe, zbudowane w oparciu o specjalne koła stożkowe.
Most napędowy przekazuje napęd ze skrzyni biegów na koła pojazdu. W skład mostu napędowego wchodzi przekładnia główna, która zmniejsza wartość pręd-kości kół jezdnych względem prędkości wału napędowego oraz zwiększa wartość momentu napędowego przekazywanego na koła poprzez mechanizm różnicowy.
Zadaniem układu hamulcowego jest możliwie najszybsze całkowite zatrzy-manie pojazdu z każdej prędkości, z jaką się porusza, lub jego unieruchomienie.

67
Układy hamulcowe mogą być wyposażone w dodatkowe układy takie, jak np. ABS, które mogą wspomagać układ hamulcowy, a zarazem zmniejszają ryzyko wpadnię-cia pojazdu w poślizg, a tym samym zwiększają bezpieczeństwo pasażerów.
Układ kierowniczy ma za zadanie umożliwienie zmiany kierunku jazdy na wybrany przez kierowcę. Układ kierowniczy dodatkowo może być wyposażony we wspomaganie, które ułatwia skręt kół w pojeździe poruszającym się z nie-wielką prędkością bądź też nieporuszającym się.
Zadaniem układu zawieszenia jest zapewnienie jak najlepszej przyczepności kół pojazdu do nawierzchni. Układ zawieszenia ma również za zadanie połączenie pojazdu z kołami jezdnymi, jak również jak najlepsze tłumienie drgań i nierówno-ści podczas jazdy pojazdu. Zawieszenie powinno również zapewniać podróżnym odpowiedni komfort jazdy.
Współczesne pojazdy samochodowe mają być nie tylko trwałe i niezawodne, ale także bezpieczne. W celu osiągnięcia tego celu pojazdy samochodowe coraz częściej wyposaża się w coraz to złożone i wyrafinowane systemy bezpieczeń-stwa. Systemy bezpieczeństwa stosowane w pojazdach samochodowych można podzielić na dwie kategorie: czynne i bierne.
Systemy bezpieczeństwa czynnego – to wszystkie czynniki, mające na celu zmniejszenie do minimum prawdopodobieństwa wystąpienia kolizji lub wypadku. Do tej grupy m.in. można zaliczyć:
– automatyczne pałąki bezpieczeństwa w samochodach typu kabriolet, roadster (antyrollover),
– układy wspomagające kierowcę podczas hamowania (m.in. ABS, EBS),– układy wspomagające kierowcę podczas ruszania i jazdy (m.in. ASR, ESP,
adaptacyjny tempomat),– klimatyzacja wnętrza pojazdu, układy wspomagania – kierownicy, parko-
wania itd.,– komfortowe i ergonomiczne wnętrza pojazdu.Systemy bezpieczeństwa biernego – to wszystkie czynniki, mające na celu
zmniejszenie do minimum skutków już zaistniałej kolizji lub wypadku z punktu widzenia pasażerów pojazdu.
Do tej grupy m.in. można zaliczyć:– pasy bezpieczeństwa,– poduszki powietrzne i napinacze,– strukturę nadwozia (sztywna klatka pasażerska, odpowiednie zderzaki,
kontrolowane strefy zgniotu, wzmocnienia drzwi i ścian bocznych),– kształt nadwozia (brak wystających elementów, zaokrąglone części poszy-
cia nadwozia),– regulowane zagłówki,– dzielona kolumna kierownicza,– szyby klejone,

68
– wykładziny wewnętrzne niepalne i nietoksyczne,– brak ostrych krawędzi wewnątrz pojazdu,– bezpieczny układ paliwowy (zbiornik paliwa umieszczony poza strefą
zgniotu, systemem uniemożliwiającym wyciek paliwa w przypadku prze-wrócenia samochodu),
– zamki w drzwiach umożliwiające ich samoczynne otwarcie w razie zde-rzenia oraz ułatwiające otwarcie drzwi po wypadku
– pałąk bezpieczeństwa w samochodach typu kabriolet, roadster.
1.14. Charakterystyka materiałów konstrukcyjnych
Do podstawowych materiałów technicznych, stosowanych na elementy maszyn i urządzeń zaliczamy:
– materiały naturalne, wymagające jedynie nadania kształtu, do technicz-nego zastosowania,
– materiały inżynierskie, niewystępujące w naturze, lecz wymagające zasto-sowania złożonych procesów wytwórczych do ich przystosowania do potrzeb technicznych po wykorzystaniu surowców dostępnych w naturze.
Przykładami materiałów naturalnych są: drewno, niektóre kamienie, skały i minerały. Do podstawowych materiałów inżynierskich zaliczamy następujące grupy [3]:
– metale i ich stopy,– polimery,– materiały ceramiczne,– materiały kompozytowe.Podstawą podanej klasyfikacji jest istota wiązań pomiędzy atomami tworzą-
cymi dany materiał, utrzymujących je w uporządkowanych przestrzennie ukła-dach i determinujących podstawowe własności materiału. Materiały kompozy-towe są tworzone przez połączenie dowolnych dwóch z wymienionych materia-łów inżynierskich w monolityczną całość, co zapewnia uzyskanie innych własno-ści od właściwych dla każdego z materiałów składowych.
Metale (np. żelazo – Fe) otrzymuje się z rud występujących głownie w postaci tlenków, węglanów, wodorotlenków i siarczków, jak magnetyt (Fe3O3), hematyt (Fe2O3), syderyt (FeCO3), limonit (2FeO3 3H2O) i piryt (FeS2). Przemysłowe stopy żelaza można podzielić następująco (rys. 1.53):
– stale – są to stopy żelaza (Fe) z węglem (C) oraz ewentualnie innymi pier-wiastkami zawierającymi do ok. 2% węgla, obrabianymi plastycznie, otrzymane w procesie stalowniczym, w stanie ciekłym (rudy → wielki piec → surówka, czyli stop Fe2C oraz Si, Mn, S, F, O, N – do 10% → utlenianie domieszek → produkt →

69
stal węglowa (ok. 10% domieszek bez C); rozróżnia się stale w postaci kutej, wal-cowanej na gorąco lub zimno i ciągnionej,
– staliwa – stopy w postaci lanej otrzymane przez odlanie i krzepnięcie w formach, bez dalszej obróbki plastycznej, o zawartości węgla – C < 2%;
– żeliwa – stopy odlewnicze Fe z C i ewentualnie innymi pierwiastkami sto-powymi, zawierające praktycznie ponad 2% do 4,3% węgla. Rozróżnia się żeliwa białe i szare.
Rys. 1.53. Podstawowe grupy materiałów inżynierskich [3].
Metale nieżelazne dzieli się następująco:– lekkie, np. aluminium, tytan, magnez; beryl,– ciężkie, np. nikiel, miedź, kobalt,– trudnotopliwe, np. niob, molibden, tantal,– szlachetne – np. złoto, srebro, platyna.Stopy metali nieżelaznych dzielą się na odlewnicze i do obróbki plastycznej
np.:– stopy aluminium: aluminium – krzem, aluminium – krzem – miedź, alu-
minium – krzem – magnez,– miedzi: miedź – cynk, miedź – ołów – cyna,– cynku: cynk – aluminium – miedź,– ołowiu: ołów – cyna – antymon – miedź,– cyny: cyna – antymon – miedź.

70
Materiałami ceramicznymi nazywa się wyroby formowane z plastycznych surowców ceramicznych (gips, glinka iłowa, kaolin, glina), lessu, kwarcu, miki, substancji ceramicznych i wypalane w wysokiej temperaturze, np.: cegła, pustaki, dachówka, porcelana, porcelit, kamionka, klinkier.
Spieki ceramiczno-metalowe (cermetale) są to materiały uzyskane przez połą-czenie proszków ceramicznych z metalami. Składnikami ceramicznymi są: tlenki, węgliki, borki, krzemki i azotki. Jako metale wiążące stosuje się: żelazo, chrom nikiel, aluminium, molibden, kobalt, wolfram, srebro i inne. Przykładowo węgliki spiekane są to spieki węglików metali trudnotopliwych z metalem wiążącym, wytwarzane metodą metalurgii proszków i przeznaczone głównie na narzędzia do obróbki skrawaniem i do obróbki plastycznej.
Tworzywa sztuczne, zwane polimerami są materiałami na podstawie polime-rów syntetycznych, otrzymywanych w wyniku polireakcji z produktów chemicz-nej obróbki węgla, ropy naftowej i gazu ziemnego lub polimerów naturalnych uzyskiwanych przez modyfikację produktów naturalnych (np. celuloza, kauczuk, białko).
Ogólnie tworzywa sztuczne dzielą się na:– elastomery (kauczuk naturalny i syntetyczny), czyli tworzywa, które
po dużym odkształceniu wykazują zdolność prawie natychmiastowego powrotu do postaci pierwotnej lub do niej zbliżonej, które mogą być modyfikowane (proces wulkanizacji) do stanu rozpuszczalnego,
– plastomery: termoplasty i duropalsty. Termoplasty są plastyczne w pod-wyższonych temperaturach i twardnieją w temperaturze otoczenia (pro-ces odwracalny). Duroplasty to materiały, które natychmiast przechodzą nieodwracalnie ze stanu plastycznego w stan utwardzony, pod wpływem podwyższonej temperatury (tworzywa termoutwardzalne) lub pod wpły-wem reakcji chemicznych (tworzywa chemoutwardzalne).
Materiały kompozytowe są to połączenia dwóch lub więcej odrębnych i nie rozpuszczających się w sobie faz, z której każda odpowiada innemu podstawo-wemu materiałowi inżynierskiemu, zapewniającymi lepszy zespół własności i cech strukturalnych od właściwości dla każdego z materiałów oddzielnie (rys. 1.54).

71
Rys. 1.54. Charakterystyka materiałów kompozytowych [4].
Inne przykłady materiałów kompozytowych: drewno – włókna celulozy w osnowie ligniny, bambus; kości; płyty fornirowe; żelbeton – osnowa – beton, włókna – pręty stalowe.
Materiały konstrukcyjne charakteryzują się zróżnicowanymi własnościami, wśród których najważniejsze przedstawiono w tabeli 1.1 i na rysunkach 1.55 i 1.56.
tabela 1.1. Charakterystyki materiałów konstrukcyjnych.
A. WŁASNOŚCI FIZYCZNE:1. Struktura krystaliczna.2. Gęstość.3. Temperatura topnienia.4. Prężność pary.5. Lepkość.6. Porowatość.7. Przepuszczalność.8. Przezroczystość.9. Własności optyczne.10. Stabilność wymiarowa.
C. WŁASNOŚCI ELEKTRYCZNE:1. Przewodność.2. Stała dielektryczna.3. Natężenie koercji.4. Histereza.

72
B. WŁASNOŚCI MECHANICZNE:1. Twardość.2. Moduł sprężystości:
– rozciąganie,– ściskanie.
3. Współczynnik Poissona.4. Krzywa naprężenie/odkształcenie:
– rozciąganie,– ściskanie,– ścinanie.
5. Wytrzymałość:– rozciąganie,– ściskanie,– element nośny.
6. Własności zmęczeniowe:– chropowatość,– karb,– zmęczenie korozyjne,– naprężenia kontaktowe,– korozja cierna.
7. Wykruszanie się.8. Oddziaływanie balistyczne.9. Temperatura przejścia w stan kruchy.10. Odporność na kruche pękanie (Ktc).11. Zachowanie wysokotemperaturowe.12. Pełzanie.13. Naprężenie do zerwania.14. Współczynnik drgań.15. Własności cierne:
– korozja cierna,– ścieranie,– erozja.
16. Kawitacja.
D. WŁASNOŚCI CHEMICZNE:1. Pozycja w szeregu napięciowym.2. Korozja i degradacja:
– atmosfera,– woda morska,– kwasy,– spaliny,– promieniowanie nadfioletowe.
3. Utlenianie.4. Stabilność cieplna.5. Stabilność biologiczna.6. Korozja naprężeniowa.7. Kruchość wodorowa.8. Przepuszczalność hydrauliczna.
E. WŁASNOŚCI CIEPLNE:1. Przewodnictwo.2. Pojemność cieplna.3. Współczynnik rozszerzalności cieplnej.4. Emisyjność.5. Absorpcyjność.6. Współczynnik ablacyjny.7. Ogniotrwałość.
F. WŁASNOŚCI TECHNLOGICZNE:1. Lejność.2. Obrabialność cieplna.3. Hartowność.4. Odkształcalność.5. Skrawalność.6. Spawalność.
G. WŁASNOŚCI JĄDROWE:1. Określenie półrozpadu.2. Przekrój poprzeczny.3. Histereza.

73
Rys. 1.55. Charakterystyki wytrzymałościowe materiałów inżynierskich [1].

74
Rys. 1.56. Mapa grup materiałów na osnowie żelaza, stosowanych do napawania [4].

75
Literatura
1. Ashby M.F., Jone D.R.H., Engineering Materials 2, Pergamon, Oxforf, 1992, wydana w języku polskim przez Wydawnictwo Naukowo-Techniczne, War-szawa 1997.
2. Dietrich M., Podstawy konstrukcji maszyn. Tom 1. WNT, Warszawa 19993. Dobrzański L.A., Metalowe materiały inżynierskie, WNT, Warszawa 20044. Dobrzański L.A., Podstawy metodologii projektowania materiałowego, Wydaw-
nictwo Politechniki Śląskiej 2009; 5. Kotnis G., Budowa i eksploatacja układów hydraulicznych w maszynach.
Wydawnictwo KaBe, Krosno, 2008. 6. Praz zbiorowa. Poradnik warsztatowca mechanika. WNT, Warszawa 1981. 7. Reymer B. i inni, Mały poradnik mechanika. Tom I i II. Wydawnictwo
Naukowo-Techniczne. Warszawa 1988. 8. Rutkowski A., Części maszyn, WSiP, Warszawa 1993.9. Świat Wiedzy, Dział Nauka i Technika, Wydawnictwo Marshall Cavendish
Polska Sp. z o.o. 200810. www. skf.com.pl. 11. www.nirostal.pl.12. www.totota.com.pl.


77
2. Podstawy eksploatacji maszyn i urządzeń
2.1. Definicja eksploatacji
Bardzo ogólnie rozpatrując pojęcie „gospodarki”, możemy powiedzieć, że składają się na nią etapy produkcji dóbr (i usług), ich dystrybucja, konsumpcja i, w ostatnim etapie, utylizacja (rys. 2.1). Produkcja to działalność ludzka, któ-rej celem jest wytwarzanie określonych dóbr materialnych. Dystrybucja obejmuje wszelkie czynności związane z pokonywaniem przestrzennych, czasowych, ilo-ściowych i asortymentowych różnic występujących między sferą produkcji i sferą konsumpcji. Konsumpcja to zużywanie posiadanych dóbr w celu bezpośredniego zaspokojenia ludzkich potrzeb. Utylizacja z kolei to unieszkodliwianie, niszcze-nie lub wykorzystanie odpadów jako surowców wtórnych. W każdym z tych eta-pów gospodarki występuje praca ludzi oraz wykorzystywane są różnego rodzaju maszyny i urządzenia, a różne aspekty tego wykorzystania są przedmiotem zain-teresowania nauki o nazwie eksploatacja techniczna (rys. 2.1).
Rys. 2.1. Miejsce eksploatacji w gospodarce.

78
Eksploatacja techniczna to nauka, której przedmiotem badań jest racjonalne wykorzystanie maszyn przez człowieka – obejmuje kompleks czynności mających na celu utrzymanie maszyn w stanie gwarantującym najkorzystniejszy przebieg procesu operacyjnego.
Każdy obiekt techniczny charakteryzuje się pewnymi cechami ogólnymi: jest celowo wytworzony z materii nieożywionej przez człowieka, ma określone prze-znaczenie (zbiór zastosowań), ulega uszkodzeniom i najczęściej wymaga obsługi, ma skończoną trwałość, może być celowo wykorzystany tylko przez człowieka, może być ulepszany, może szkodzić człowiekowi oraz przechodzić w swojej histo-rii przez kolejne fazy życia.
Definicje eksploatacji wg różnych źródeł przedstawiono w tabeli 2.1.
tabela 2.1. Definicje eksploatacji.
Encyklopedia PWN 1) Wykorzystanie np. bogactw naturalnych.2) Całość operacji, których celem jest użytkowa-
nie urządzeń w zakładach pracy. 3) Wyzysk.
Hebda M., Mazur T., Pelc H., „Teoria eksploatacji pojazdów”
Proces, który odbywa się od chwili wytworzenia pojazdu do chwili jego likwidacji (złomowania).
Powierża L., „Zarys inżynierii syste-mów bioagrotechnicznych”
Sekwencja zdarzeń losowych wyrażających stan obiektu i ich zmiany, czyli kontrolowany pro-ces losowy wyczerpywania zasobu użytkowego obiektu.
Michalski R., Niziński S., „Podstawy eksploatacji obiektów technicznych”
Ogół wszystkich zdarzeń, zjawisk i procesów zachodzących w danym obiekcie od chwili zakoń-czenia procesu jego wytwarzania do chwili likwi-dacji.
W dalszym ciągu pracy używana będzie definicja przedstawiona w PN-82/N-04001 Eksploatacja obiektów technicznych. Terminologia ogólna.
Eksploatacja jest to zespół celowych działań organizacyjno-technicznych i ekonomicznych ludzi z obiektem technicznym oraz wzajemne relacje, wystę-pujące między nimi od chwili przyjęcia obiektu do wykorzystania zgodnie z przeznaczeniem aż do chwili likwidacji.
Działania organizacyjne – logistyka, ustalenie kolejności wykonywania opera-cji, opracowanie technologii itd.
Działania techniczne – naprawy, przeglądy, wymiany, diagnozowanie, kalibra-cje, montaż, demontaż itd.

79
Działania ekonomiczne – zarządzanie, optymalizacja efektywności wykorzy-stania, kalkulacja LCC (Life Cycle Costs) – Koszty Cyklu Życia Obiektu.
Z podanych wyżej definicji wynika, że eksploatacja obiektu technicznego jest jedną z faz jego życia, na które składają się:1 – wartościowanie (zaistnienie potrzeby),2 – konstruowanie (projektowanie obiektu),3 – wytwarzanie (produkcja obiektu)4 – eksploatacja.
Czasami wyróżnia się również fazę utylizacji jako ostatni etap życia obiektu technicznego (rys. 2.2).
wartościowanie projektowanie wytwarzanie eksploatacja utylizacja
Rys. 2.2. Fazy życia obiektu technicznego.
W takim podejściu uważamy, że obiekt techniczny jest eksploatowany zarówno wówczas, gdy jest bezpośrednio wykorzystywany do zadań produkcyj-nych (jest użytkowany), jak i wówczas, gdy jest np. naprawiany (jest obsługiwany). Na przykład samochód ciężarowy jest eksploatowany nie tylko, gdy wiezie ładu-nek na miejsce przeznaczenia, ale również gdy oczekuje na załadunek, jest napra-wiany czy przechowywany w garażu.
W najprostszym ujęciu użytkowanie dotyczy działania ze sprawnym obiek-tem, natomiast obsługiwanie jest to działanie z obiektem niesprawnym.
Termin „eksploatacja” można również wyjaśnić, posługując się pojęciem łań-cucha działania, tj. uporządkowaną trójką działających elementów (rys. 2.3) [7]:a) podmiot – sprawca działania,b) pośrednik – narzędzie wykorzystane w działaniu,c) przedmiot – materiał, na którym zlokalizowany jest cel działania.

80
Rys. 2.3. Eksploatacja jako łańcuch działania [7].
obiekt jest użytkowany wówczas, gdy istnieje taki łańcuch działania, w któ-rym obiekt jest pośrednikiem działania.
obiekt jest obsługiwany wówczas, gdy istnieje taki łańcuch działania, w któ-rym obiekt jest przedmiotem działania.
Przykłady łańcuchów użytkowania pojazdu:
PODMIOT POŚREDNIK (obiekt techniczny) PRZEDMIOTkierowca ciężarówka materiał budowlanykierowca taksówka pasażerkierowca prywatny pojazd kierowca
Przykłady łańcuchów obsługiwania:
PODMIOT POŚREDNIK PRZEDMIOT (obiekt techniczny)kierowca podnośnik pojazd
pracownik stacji paliw dystrybutor paliwa pojazdmechanik narzędzia pojazd
Przyjmuje się, że maszyna jest użytkowana wówczas, gdy istnieje taki łań-cuch działania, w którym pełni ona rolę pośrednika. Natomiast jest obsługiwana tylko wtedy, gdy pełni rolę przedmiotu w łańcuchu działania. Łańcuch, w którym maszyna jest pośrednikiem lub przedmiotem działania, nazywać będziemy łańcu-chem eksploatacji [1, 2, 3, 6].

81
2.2. Budowa systemu eksploatacji
Warunkiem koniecznym realizowania eksploatacji w praktyce jest istnienie czterech podstawowych elementów (rys. 2.4) [4, 5]:
– obiektu eksploatacji (OE),– stanowiska użytkowania (SU),– stanowiska obsługi (SO),– stanowiska kierowania eksploatacją (KE).
Rys. 2.4. Schemat elementarnego układu eksploatacji [4].
Obiekt eksploatacji składa się z elementów wyróżnionych na różnych pozio-mach jego złożoności, tj. podsystemów, zespołów, podzespołów, części itd. (rys. 2.5).
Rys. 2.5. Dekompozycja obiektu eksploatacji.
KE SO
SU OE

82
Stanowisko użytkowania obiektu składa się z użytkownika (podmiotu), przed-miotu operacyjnego i otoczenia układu użytkowania.
Stanowisko obsługi obiektu składa się z personelu obsługującego, środków obsługi (narzędzi) i otoczenia.
W elementarnym układzie eksploatacji obiektu występuje – jako minimum – szereg dwóch łańcuchów działania. W każdym z tych łańcuchów realizowany jest inny cel działania. Jest to źródło wielu konfliktów w systemie eksploatacji. Obiekty techniczne biorą udział w dwu różnych działaniach: ich użytkowaniu, zorientowa-nym przede wszystkim na produkt i ich obsługiwaniu, zorientowanym na ten wła-śnie obiekt i jego wartość. O ile ich użytkowanie wiąże się bezpośrednio z wyko-nywaniem zadania produkcyjnego, o tyle obsługiwanie jest traktowane jako pro-ces pomocniczy:
„ja maszynę użytkuję (ja produkuję), a ty ją naprawiasz (ty kosztujesz)”.
Elementarny układ eksploatacji umożliwia racjonalne wykorzystanie danego obiektu zgodnie z przyjętymi zasadami eksploatacji. Umożliwia on także analizę systemu eksploatacji obiektu z punktu widzenia jego usprawnień.
Z prekseologicznego punktu widzenia system eksploatacji maszyn (SEM) jest zbiorem wszystkich elementarnych układów eksploatacji tych maszyn, uporząd-kowanych relacją współzależności.
W ujęciu formalnym system eksploatacji maszyny (SEM) definiuje się nastę-pująco [4, 5, 6]:
SEM = <E, D, R, G, H> ,
gdzie: E – zbiór stanów eksploatacyjnych maszyny: zbiór użytków i obsług (repertuar eksploatacyjny); D – zbiór stanowisk eksploatacyjnych maszyny: zbiór stanowisk użytku
i obsługi (baza eksploatacyjna); R – rozkład eksploatacyjny maszyny (relacje określone na iloczynie karte-
zjańskim ExD jako zbiór łańcuchów eksploatacji); G – graf eksploatacyjny (relacje określone na ExE lub DxD); H – porządek eksploatacyjny (relacje ustalające następstwo w czasie pracy
maszyny).
Przedstawiona koncepcja modelu formalnego systemu eksploatacji maszyny jest przydatna do budowy matematycznego modelu decyzyjnego tego systemu.
Repertuar eksploatacyjny jest zbiorem stanów eksploatacyjnych danego obiektu. Zawiera on przynajmniej dwa stany: stan użytku (zwany krótko użyt-kiem) oraz stan obsługi (zwany krótko obsługą).

83
Do własności charakteryzujących stan eksploatacyjny obiektu zaliczamy co najmniej dwie własności: zdatność i potencjał eksploatacyjny.
Z punktu widzenia realizacji głównego celu użytkowania obiektu konkretny obiekt możemy uznać za zdatny lub niezdatny w danym układzie eksploatacji. Obiekt niezdatny do użytkowania jest zdatny do obsługiwania. Mówimy wtedy, że obiekt jest w stanie obsługi. Obiekt zaś zdatny do użytkowania jest niezdatny do obsługiwania. Mówimy wtedy, że obiekt jest w stanie użytku.
Potencjał eksploatacyjny jest drugą istotną własnością charakteryzującą eks-ploatacyjny stan obiektu. Podobnie, jak odróżnialiśmy dwa rodzaje zdatności (użytkową i obsługową), odróżniamy również dwa rodzaje potencjału: użytkowy i obsługowy. Potencjał użytkowy jest miarą zdolności obiektu do użytkowania. Potencjał ten jest najczęściej utożsamiany z potencjałem eksploatacyjnym obiektu w danym układzie eksploatacji. Potencjał obsługowy jest miarą potrzeb obiektu w zakresie obsługi.
Graf eksploatacyjny – graf ten ustala zasady przejścia między wyróżnionymi stanami eksploatacyjnymi obiektu (rys. 2.6, 2.7 oraz 2.10).
Realizacja procesu eksploatacji obiektu zależy w sposób istotny od grafu eks-ploatacyjnego. Wierzchołkami grafu są stany eksploatacyjne obiektu, łukami zaś – możliwe przejścia między stanami, które odpowiadają wyróżnionym procesom eksploatacyjnym. Opis grafu eksploatacyjnego może być dany w postaci rysunku lub macierzy zerojedynkowej. Przejście procesu w grafie wymuszają odpowied-nie stanowiska eksploatacyjne. Z każdym przejściem związana jest zmiana poten-cjału eksploatacyjnego obiektu, która wpływa na użyteczność eksploatacji obiektu (nakłady i dochody). Rola kierownika eksploatacji polega na takim sterowaniu procesem eksploatacji (przy danych zakłóceniach i ograniczeniach), aby przy danym kryterium proces ten był najbardziej efektywny.
Rys. 2.6. Graf eksploatacyjny procesu trójstanowego: e1 – użytek, e2 – postój, e3 – obsługa.
e1
e3
e2

84
Rys. 2.7. Graf eksploatacyjny procesu czterostanowego: e1 – użytek, e2 – postój, e3 – obsługa, e4 – oczekiwanie na obsługę.
W praktycznej realizacji procesu eksploatacji obiektu występują cykle eksplo-atacyjne (np. cykl remontowy). Cykle te ustala porządek eksploatacyjny obiektu.
Mówimy, że porządek eksploatacyjny obiektu został określony, gdy znany jest uporządkowany ciąg stanów eksploatacyjnych tego obiektu (rys. 2.8 oraz 2.11). Na przykład porządek eksploatacyjny obiektu, dla którego graf eksploatacyjny dany jest w postaci przedstawionej wcześniej, może być następujący:
Rys. 2.8. Przykład ustalonego porządku eksploatacyjnego.
Przykłady elementów systemów eksploatacji obiektów dwu i trzystanowego przedstawiono na rys. 2.9.
e1
e4
e2
e3
e1 e2 e4 e3 e1 e4 e3 e2

85
a) Przykład systemu eksploatacji dwustanowego.
b) Przykład systemu eksploatacji trzystanowego.
Rys. 2.9. Przykłady zidentyfikowanych systemów eksploatacji.
Przykład: Opisać proces eksploatacji obiektu technicznego uwzględniając: łańcuch działania, układ eksploatacyjny, repertuar eksploatacyjny, bazę eksploata-cyjną, graf eksploatacyjny.
Przykładowy System Eksploatacji Maszyny
1. Repertuar eksploatacyjny (E):
2. Baza eksploatacyjna (D):
3. Rozkład eksploatacyjny (R):
e1 – postój,e2 – obsługa codzienna,e3 – transport maszyny sprawnej,e4 – transport maszyny niesprawnej,e5 – praca zbieranie pokosów,e6 – praca cięcie kukurydzy,e7 – konserwacja w warsztacie,e8 – naprawa w warsztacie,e9 – przestój,e10 – złomowanie.
d1 – garaż,d2 – warsztat w zakładzie usług remontowych,d3 – droga,d4 – pole.
d1 d2 d3 d4
e1 1 1 1 1e2 1 1 0 1e3 0 0 1 0e4 0 0 1 0e5 0 0 0 1e6 0 0 0 1e7 0 1 0 0e8 0 1 0 0e9 1 1 1 1e10 0 1 0 0
4. Graf eksploatacyjny (G) d1 d2 d3 d4
d1 1 0 1 0d2 0 1 1 0d3 1 1 1 1d4 0 0 1 1

86
e1 e2 e3 e4 e5 e6 e7 e8 e9 e10
e1 1 1 1 0 1 1 1 0 1 0e2 1 1 1 0 1 1 1 0 1 0e3 1 1 1 0 0 0 1 0 1 0e4 0 0 0 1 0 0 0 1 1 0e5 1 1 0 0 1 0 0 0 1 0e6 1 1 0 0 0 1 0 0 1 0e7 1 1 1 0 0 0 1 0 1 0e8 1 1 1 0 0 0 1 1 1 1e9 0 0 0 1 0 0 0 1 1 1e10 0 0 0 0 0 0 0 0 0 1
Rys. 2.10. Graf eksploatacyjny procesu dziesięciostanowego.
d1
d3 d4
d2
e1 e2 e3
e4 e5 e6 e7
e8 e9 e10

87
5. Porządek eksploatacyjny (H)
Rys. 2.11. Przykład ustalonego porządku eksploatacyjnego z uwzględnieniem czasu prze-bywania obiektu w poszczególnych stanach.
2.3. Zarządzanie eksploatacją w zakładach – funkcje
Zarządzanie eksploatacją obiektów technicznych w przedsiębiorstwie dotyczy – jak wynika z wcześniejszych rozważań – co najmniej dwóch elementów:1 – zarządzania produkcją (użytkowaniem maszyn),2 – zarządzania utrzymaniem (obsługą) maszyn.
W bardziej złożonych strukturach organizacyjnych wyróżnia się również działy odpowiedzialne za logistykę, technologię, rozwój itd.
Na rysunkach 2.12 oraz 2.13 przedstawiono przykładowe schematy organiza-cyjne, pokazujące rolę działów odpowiadających za poszczególne elementy sys-temu eksploatacji. Porównując schemat organizacyjny z rys. 2.13 z elementar-nym układem eksploatacji (rys 2.4.), widać, że w tym konkretnym przykładzie rola kierownika eksploatacji jest tożsama z rolą kierownika produkcji, któremu podległy jest kierownik utrzymania ruchu. W przypadku schematu na rysunku 2.12 kierownicy produkcji i utrzymania zajmują równorzędne stanowiska. Należy zaznaczyć, że w obu tych przypadkach partykularne cele kierowników są różne, co powoduje tzw. konflikt kierowników eksploatacji. Racjonalne zarządzanie eks-ploatacją powinno integrować te działania wokół wspólnego celu każdego przed-siębiorstwa, jakim jest efektywna produkcja dóbr. Sytuację obrazuje rysunek 2.15. Analizując rysunek, można stwierdzić, że podstawą podejmowania decyzji eks-ploatacyjnych powinien być rachunek kosztów obejmujących zarówno koszty utrzymania maszyn, jak i koszty strat produkcji wynikające z przestojów tych

88
maszyn. Wzrost nakładów na utrzymanie maszyn ponad podstawowe działania, obejmujące przykładowo wymiany olejów, filtrów, przeglądy, powoduje zmniej-szenie strat wynikających z nieprzewidzianych przestojów i zmniejszanie rozpa-trywanych kosztów. Tendencja ta jest widoczna tylko do pewnego momentu, po przekroczeniu którego zaczynają rosnąć straty produkcji wynikające z nadmier-nych przestojów maszyny w podsystemie obsługiwania. Można zatem stwierdzić, że optymalna strategia eksploatacji to taka, przy której nakłady na utrzymanie maszyn powodują najmniejsze straty produkcji wynikające z tej strategii.
Rys. 2.12. Schemat organizacyjny przedsiębiorstwa, w którym Dział Techniczny (UR) jest oddzielony od Produkcji.

89
2.13. Schemat organizacyjny przedsiębiorstwa, w którym Dział Utrzymania Ruchu jest podporządkowany kierownictwu Produkcji.
Rys. 2.14. Integracja działań kierowników eksploatacji ukierunkowana na minimalizację strat produkcji.
Zarządzanie eksploatacją obiektów technicznych dotyczy zasobów systemu eksploatacji (zasoby ludzkie, finansowe, rzeczowe i informacyjne) i obejmuje pla-nowanie i podejmowanie decyzji, organizowanie, kierowanie oraz kontrolowanie wykonywane z zamiarem osiągnięcia celów globalnych i cząstkowych przedsię-

90
biorstwa. Zatem celem systemu eksploatacji obiektów technicznych jest zarówno racjonalne wykorzystanie (użytkowanie) obiektów technicznych, jak i ich utrzy-manie w stanie zdatności funkcjonalnej i zadaniowej.
2.4. Charakterystyka procesu użytkowania i obsługiwania
2.4.1. Charakterystyka procesu użytkowaniaUżytkowanie maszyn jest zasadniczym procesem występującym w proce-
sie eksploatacji, ponieważ tylko przez użytkowanie zaspokajane są potrzeby, dla których maszyna została zaprojektowana i wytworzona. Podczas procesu użyt-kowania maszyna przetwarza różne rodzaje energii w pracę mechaniczną, przy czym występują siły oddziaływania na siebie elementów urządzenia. Siły te mogą oddziaływać chwilowo, krótkotrwale lub długotrwale, mogą być cykliczne, okre-sowe i ciągłe.
Rozróżnia się trzy rodzaje pracy urządzeń mechanicznych podczas ich użyt-kowania [9]:
– praca ciągła,– praca z planowanymi przerwami,– praca z wymuszonymi (losowymi) przerwami.
Można wyróżnić następujące warunki użytkowania urządzeń mechanicznych:– zmienność prędkości mechanizmów roboczych lub mechanizmów prze-
mieszczających maszynę (np. zmienność parametrów skrawania obra-biarki),
– zmienność roboczych cykli technologicznych w zależności od zmienia-jących się własności urabianego tworzywa, wykonywanej pracy itp. (np. zmienny cykl pracy wózka widłowego przy załadunku związany z zapeł-nianiem skrzyni ładunkowej),
– zmienność liczby godzin pracy w ciągu rozpatrywanego okresu czasu lub zmienność przejechanych kilometrów,
– zmienność czynników otoczenia (temperatura, wilgotność itd.),– zmienność wartości sterowanych parametrów technicznych (np. pręd-
kości roboczych, wartości ciśnienia w układzie hydraulicznym, wartości posuwów),
– zmienność oddziaływania podłoża na urządzenie.

91
Prawidłowość użytkowania urządzeń mechanicznych można ocenić według kryteriów [9]:
– technicznych, wynikających z określenia poprawności wykonywania funkcji, do których urządzenie jest przeznaczone (np. wydajność tech-niczna, zużycie paliwa, moc),
– ekonomicznych, wynikających z interpretacji ekonomicznego znaczenia własności technicznych (np. wydajność rzeczywista na jednostkę czasu pracy, koszt uzyskania efektu końcowego),
– bezpieczeństwa, wynikających z warunków bezpieczeństwa ludzi i środo-wiska naturalnego.
Miary procesu użytkowania mogą być wyrażone w jednostkach czasu, innych jednostkach naturalnych lub w jednostkach wartościowych. Najczęściej stosuje się następujące miary użytkowania [8]:
– miara czasu (np. liczba godzin pracy obrabiarki, koparki itd.),– miara masy (np. liczba ton przewiezionego ładunku),– miara długości (np. liczba kilometrów przejechanych przez pojazd).Mogą być stosowane również iloczyny miar, np. motogodziny, tonokilometry.
W analizie użytkowania urządzeń mechanicznych rozróżnia się dwa zasadni-cze rodzaje cyklów pracy [9]:1. cykl technologiczny, w trakcie którego element roboczy urządzenia łączy się
i rozłącza z przedmiotem, na który oddziaływuje,2. cykl roboczy, w trakcie którego uwzględnia się czas przestoju urządzenia zwią-
zany z jego odłączeniem od przedmiotu oddziaływania (np. zmiana narzędzia lub oprzyrządowania).Przy analizie procesu użytkowania maszyn należy zwrócić uwagę na to, że
w czasie cyklu roboczego urządzenia okres efektywnego działania jest krótszy od czasu trwania całego cyklu (rys. 2.15).
Rys. 2.15. Bilans składowych czasu użytkowania urządzenia mechanicznego w cyklu roboczym [9].

92
Analizując cykle pracy urządzeń mechanicznych i ustalając udziały poszcze-gólnych okresów, można określić wskaźniki, które mogą być miarami procesu użytkowania.
Na przykład współczynnik wykorzystania urządzenia oblicza się jako stosu-nek okresu ruchu do czasu pełnego cyklu roboczego.
Dla każdego urządzenia mechanicznego można określić intensywność użyt-kowania, która jest główną charakterystyką procesu użytkowania urządzenia. Miarą intensywności użytkowania jest zazwyczaj jednostka fizyczna, w której wyraża się ilość wykonanej pracy i jednostka czasu (np. kg/h, km/h, m3/h).
2.4.2. Charakterystyka procesu obsługiwaniaW literaturze obsługiwanie określa się jako zbiór czynności zapobiegaw-
czych, których zadaniem jest podtrzymanie własności użytkowych oraz zbiór czynności naprawczych, których zadaniem jest odtworzenie własności użyt-kowych obiektów technicznych. obsługiwanie to zbiór procesów wykonanych w celu utrzymania obiektów technicznych (np. pojazdów mechanicznych) w stanie zdatności funkcjonalnej i zadaniowej.
W procesie obsługiwania obiektów technicznych można wyróżnić trzy grupy operacji obsługowych:a) operacje, które mają na celu zapobieganie starzeniu elementów obiektu, są to
[6]:– diagnozowanie,– prognozowanie stanu,– regulacja,– wzmacnianie połączeń,– smarowanie,
b) operacje, które mają na celu usunięcie skutków starzenia i uzyskanie stanu zdatności obiektu, są to:– lokalizacja uszkodzeń,– naprawa elementów,
c) operacje zapewniające utrzymanie czystości obiektów i ich gotowości do użyt-kowania.
Kryteria klasyfikacji obsługiwań obiektów technicznych mogą być następu-jące: krotność występowania obsług, okresowość obsługiwania, cel obsługiwa-nia, zakres prac obsługowych.
Obiekt techniczny jako obiekt obsługi generuje wiele różnych procesów obsłu-gowych. Są to zarówno obsługi jednokrotne takie, jak wprowadzanie i wycofywa-nie urządzenia z eksploatacji, jak i obsługi wielokrotne takie, jak: przygotowanie do użytkowania, konserwowanie, naprawa, transportowanie i przechowywanie

93
obiektu (tab. 2.2). Każdy z powyższych rodzajów obsług można jeszcze podzielić, np. naprawy dzielimy na naprawę bieżącą, średnią i główną, prace okresowe (kon-serwacje) dzielimy na: codzienne, tygodniowe (dekadowe), miesięczne, kwar-talne, półroczne, roczne, dwuletnie itp.
tablica 2.2. Procesy obsługowe (obsługi) [8].
Proces obsługowy(obsługa)
Czynności procesu(podstawowe)
Obsługijedno-krotne
Obsługitechniczne
wprowadzanie do eksploatacji ustawienieprzyłączeniesprawdzenierozruch
wycofywanie z eksploatacji(eksploatacja docelowa)
odłączenieusunięciedemontażprzekazanie
Obsługiwielo-krotne
konserwowanie(praca okresowa)(obsługa techniczna)
kontrola stanuochronazapewnienie współ-pracy elementów
naprawa (bieżąca, średnia, główna)
rozbiórkaweryfikacjarenowacja
przygotowanie do użytkowania(zasilanie, przegląd)
kontrola stanuoprzyrządowaniezasilanieprzegląd przed uży-ciem
Obsługiorganiza-cyjne
transportowanie(przewożenie)
opakowanieładowanietransportwyładowanie
przechowywanie(magazynowanie, składowanie, postój)
odbiór i przyjęcieulokowaniezabezpieczeniewydanie
Wśród zbioru obsług danego obiektu wyróżnimy jeszcze tzw. obsługi tech-niczne, gdy urządzenie staje się obiektem obsługi ze względu na jego stan tech-niczny mierzony odpowiednią miarą (są to: przygotowanie do użytkowania, kon-serwowanie, naprawianie) oraz tzw. obsługi organizacyjne (są to: przechowywanie

94
i przewożenie obiektu). Potrzeba tego ostatniego rodzaju obsług wynika ze wzglę-dów organizacyjnych, bo albo obiekt w danej chwili nie jest użytkownikowi potrzebny (należy go więc przechowywać do chwili późniejszej), albo też obiekt nie jest użytkownikowi potrzebny w danym miejscu (należy go więc przewieźć do innego miejsca).
Często wyróżnianymi rodzajami obsług są [7]:1. obsługi związane z ich rozłożeniem w czasie: bieżąca, sezonowa, wielolet-
nia.obsługa bieżąca – to obsługa techniczna o małym zakresie, związana ze
sprawdzeniem ukompletowania zestawu, jego stanu rzeczywistego, stopnia przy-gotowania do działania, bezpieczeństwa i higieny pracy. Może tu nastąpić uzupeł-nienie zasobów roboczych, drobna regulacja głównych układów i prace konser-wacyjne.
obsługa sezonowa (okresowa) – to obsługa techniczna o średnim zakresie, związana z przygotowaniem obiektu do znacznych zmian warunków eksploatacji, np. zima-lato; dominują w niej operacje o charakterze profilaktycznym, konser-wacyjnym i ochronnym.
obsługa wieloletnia – to obsługa techniczna związana z usuwaniem nieko-rzystnych skutków funkcjonowania (urządzeń pracujących) lub oddziaływaniu otoczenia (urządzeń przechowywanych).2. Według celu obsługi: diagnostyczna, profilaktyczna, naprawcza, zasile-
niowa.obsługa diagnostyczna – to obsługa techniczna, której celem jest rozpozna-
nie stanu niezawodnościowego obiektu. W przypadku stwierdzenia niezdatności rozciąga się ona na lokalizację miejsca niezdatności.
obsługa profilaktyczna – to obsługa techniczna, której celem jest utrzyma-nie stanu niezawodnościowego obiektu. Coraz częściej obejmuje ona wyznaczenie prawdopodobieństwa utrzymania zdatności w przyjętym czasie (prognoza zdat-ności).
obsługa naprawcza – to obsługa techniczna, której celem jest odtworzenie stanu zdatności wcześniej utraconego. Coraz częściej obejmuje ona określenie przyczyn powstania niezdatności (geneza niezdatności).
obsługa zasileniowa – to obsługa techniczna, której celem jest uzupełnienie zasobów roboczych, np. paliwa, cieczy chłodzącej itp. W wielu przypadkach roz-ciąga się ona na zmianę ukompletowania zestawu (zmianę wariantu), zabezpie-czenie przed przypadkowym użyciem itp.3. Według charakteru obsługi: techniczna, organizacyjna.
obsługa techniczna jest związana ze sprawdzeniami parametrów i zmianą stanu obiektu przez wykonanie prac demontażowych, wymianę elementów, pokrywanie powłokami ochronnymi i inne.

95
obsługa organizacyjna związana jest ze zmianą miejsca instalacji lub postoju, zmianą użytkownika (właściciela) obiektu, zmianą klasy technicznej obiektu itp.
Rozpatrzone rodzaje obsługiwań obiektów technicznych realizowane są w ich systemie obsługiwania różnymi metodami, zależnie od przyjętej strategii eksplo-atacji obiektu technicznego.
2.5. Dobre praktyki eksploatacyjne
1. Do eksploatacji wprowadza się obiekty funkcjonalne w użytkowaniu, w obsłu-giwaniu i w diagnozowaniu, z wyczerpującą dokumentacją eksploatacyjną.
2. Eksploatacja jest planowana, motywowana i kontrolowana, w tym – z kontro-lowanym ryzykiem.
3. Decyzje eksploatacyjne są uzasadniane ekonomicznie z uwzględnieniem całego okresu eksploatacji obiektów, z prognozowaniem kosztów i wyników eksploatacyjnych włącznie, z zapewnieniem i wykorzystaniem odpowiedniej rachunkowości wewnętrznej kosztów i wyników eksploatacji.
4. Kryteria podejmowania decyzji eksploatacyjnych uwzględniają satysfakcję klientów, bezpieczeństwo, obciążenie środowiska przyrodniczego i produk-tywność eksploatacji.
5. Zarządzanie integruje uczestników organizacji wokół osiągania celów eks-ploatacyjnych zarówno w sferze użytkowania, jak i utrzymywania obiektów eksploatacji, z jednoczesnym wskazywaniem odpowiedzialności za osiąganie tych celów.
6. Stosowane są zasady eksploatacji (tab. 2.3) z uwzględnieniem niezawodno-ści obiektów (nieuszkadzalności, obsługiwalności, zapewniania środków obsługi).
7. Stosowane są zasady zapobiegania uszkodzeniom, uwarunkowane budową i znaczeniem obiektu, oparte na diagnostyce technicznej.
8. Stosowane jest logistyczne podejście do gotowości technicznej i niezawod-ności obiektów technicznych, tj. zapewnianie obiektowi gotowości technicz-nej wtedy, gdy jest ona potrzebna i zapewnianie zdatności obiektu przez czas wykonywania zadania.
9. Upowszechniane są pozytywne i negatywne doświadczenia eksploatacyjne w celu ich wykorzystania w inwestowaniu, projektowaniu i eksploatacji obiek-tów technicznych.
10. Usprawniane jest wsparcie logistyczne organizacji w zakresie personelu eks-ploatacyjnego, zasobów techniki, materiałów eksploatacyjnych, usług uzupeł-niających i doradztwa.

96
11. Produkty i usługi są promowane ze względu na ich cechy eksploatacyjne oraz są kreowane zainteresowania rynku w tym zakresie.
12. Podnoszony jest poziom bezpieczeństwa techniki i technologii eksploatacji. 13. Stymulowana jest utylizacja odpadów eksploatacyjnych.
tabela 2.3. Zasady eksploatacji.
Zasada Wnioskipodmiotowości Każdy obiekt eksplo-
atacji eksploatowany jest bezpośrednio lub pośrednio przez czło-wieka lub zespół ludzi.
Użytkownikiem obiektu eksploatacji może być tylko człowiek lub zespół ludzki; obsłu-gownikiem obiektu eksploatacji może być tylko człowiek lub zespół ludzki; mechani-zacja i automatyzacja działania nigdy nie zastąpi człowieka w roli podmiotu.
celu zewnętrznego
Celem eksploatacji każdego obiektu nie jest eksploatacja tego obiektu.
Eksploatowanie obiektu zabezpiecza reali-zację pewnego celu, który jest realizowany za pomocą danego obiektu. Eksploatowanie obiektu stwarza warunki do realizacji celu pozaeksploatacyjnego i z tego punktu widze-nia powinno być oceniane.
dwóch stanów Każdy obiekt eksplo-atacji jest co najmniej dwustanowy (zdatny lub niezdatny).
Nie istnieje taki obiekt eksploatacji, któ-rego nie można byłoby użyć; nie istnieje taki obiekt eksploatacji, którego nie należałoby obsługiwać. Projektując obiekt eksploatacji, należy go zaprojektować jako obiekt zdatny i jako obiekt niezdatny. Realizując obiekt eksploatacji, należy go zrealizować jako obiekt zdatny i jako obiekt niezdatny. Szko-ląc kadry eksploatacyjne, należy je przygoto-wać do działania z obiektem zdatnym oraz z obiektem niezdatnym. Informacje eksplo-atacyjne należy zbierać zarówno o obiekcie zdatnym, jak i o obiekcie niezdatnym.

97
systemowości Każdy obiekt eksploata-cji eksploatowany jest w systemie.
Nie istnieją własności eksploatacyjne obiektu, które nie zależałyby od własności jego systemu eksploatacji (funkcjonalność, niezawodność, trwałość, efektywność). Nie można badać i oceniać „czystego” obiektu eksploatacji, gdyż jest on badany w systemie i poprzez system; zmieniać własności eksplo-atacyjne obiektu można tylko poprzez jego system eksploatacji. Nie można projektować „czystego” obiektu eksploatacji, trzeba rów-nocześnie zaprojektować jego system eksplo-atacji.
skończonej trwałości
Każdy obiekt eksploata-cji ma skończoną trwa-łość.
Nie ma obiektów niezniszczalnych; dla pod-trzymania funkcji (misji) obiektu w jego sys-temie eksploatacji musi on być odnawiany (wymieniony) w systemie.
racjonalizacji Każdy obiekt eksplo-atacji jest usprawniany (racjonalizowany).
Nie istnieją obiekty, których nie można byłoby usprawnić.
szkodliwości Każdy obiekt eksplo-atacji jest szkodliwy dla człowieka.
Obiekt eksploatacji nie tylko służy, ale rów-nież szkodzi człowiekowi; człowieka należy chronić przed szkodliwością obiektu eks-ploatacji; nie zawsze człowiek zdaje sobie sprawę ze szkodliwości obiektu eksploatacji.
trzech kierowników
Eksploatacją każdego obiektu kieruje trzech kierowników: kierow-nik użytku, kierownik obsługi oraz kierownik eksploatacji.
Cele działania kierownika użytku i kierow-nika obsługi nie są identyczne, co stwarza sytuację konfliktową w kierowaniu eksplo-atacją obiektu. Funkcje kierownika eksplo-atacji, użytku i obsługi danego obiektu może pełnić ten sam człowiek.
Literatura
1. Hebda M., Elementy teorii eksploatacji systemów technicznych, MCNEMT, Radom 1990.
2. Hebda M., Mazur T., Pelc H., Teoria eksploatacji pojazdów. WKŁ, Warszawa 1977.
3. Hebda M., Mazur T., Podstawy eksploatacji pojazdów samochodowych. WKŁ, Warszawa 1980.
4. Konieczny J., Podstawy eksploatacji urządzeń. MON, Warszawa 1975.

98
5. Konieczny J., Wstęp do teorii eksploatacji urządzeń. WNT, Warszawa 1971.6. Michalski R., Niziński S., Podstawy eksploatacji obiektów technicznych. ART,
Olsztyn 1997.7. Michalski R., Niziński S.: red. Utrzymanie pojazdów i maszyn. ITE, Radom
2007.8. Niziński S., Eksploatacja obiektów technicznych. ITE, Radom 2002.9. Okręglicki W., Łopuszyński B., Użytkowanie urządzeń mechanicznych. WNT,
Warszawa 1980.10. Powierża L., Zarys inżynierii systemów bioagrotechnicznych. ITE, Radom –
Płock 1997.

99
3.1. Podstawowe pojęcia
Zmniejszanie nadmiaru masowego, stosowanie rozbudowanych układów funkcjonalnych, automatyzacja i intensyfikacja procesów roboczych oraz koncen-tracja znacznych mocy powodują konieczność kompleksowego podejścia do oceny obiektów technicznych, w tym przede wszystkim niezawodności oraz ich trwało-ści. W złożonych liniach produkcyjnych można wyróżnić tysiące elementów skła-dowych, gdzie uszkodzenie jednego elementu doprowadzić może w następstwie do strat ekonomicznych, technicznych i zagrożeń życia ludzkiego. Dlatego podsta-wowym zadaniem inżynierów: konstruktora i technologa, jest dobór najkorzyst-niejszych parametrów konstrukcyjnych i zużyciowych z uwzględnieniem relacji pomiędzy kosztem, energochłonnością, niezawodnością, bezpieczeństwem oraz właściwościami funkcjonalno-użytkowymi. Dla osiągnięcia tego celu konieczna jest ocena niezawodności na etapach istnienia obiektu technicznego, tj. projekto-wania, wytwarzania i eksploatacji. Stosowane dotychczas sposoby projektowania, oparte na nadmiarowych współczynnikach bezpieczeństwa, nie pozwalają na pro-gnozowanie prawdopodobieństwa uszkodzenia elementu w danych uwarunkowa-niach środowiskowych.
Synonimem niezawodności jest pewność działania. Niezawodność jest defi-niowana w sposób opisowy (deskryptywny) lub ocenowy (wartościująco-norma-tywny). Oceny ilościowe mogą być opisane charakterystykami funkcyjnymi lub liczbowymi. Definicji niezawodności może być wiele, wszystkie one wywodzą się z definicji opisowo-analitycznej podanej przez Kilińskiego [3]:
Niezawodność jest to właściwość obiektu charakteryzująca jego zdolność wykonania określonych funkcji, w określonych warunkach i w określonym czasie.
W ujęciu wartościująco-normatywnym niezawodność systemu technicznego to prawdopodobieństwo zrealizowania zadania przez system w określonym prze-dziale czasu t, t∈(t0, tk) i przy ustalonych poziomach oddziaływania czynników wymuszających.
Według PN-80/N-04000 niezawodność to właściwość obiektu charakteryzu-jąca jego zdolność do wykonywania określonych funkcji, w określonych warun-kach i określonym przedziale czasu. Zgodnie z normą niezawodność jest właści-wością kompleksową, obejmującą w zależności od przeznaczenia obiektu i warun-ków jego eksploatacji takie właściwości, jak: trwałość, nieuszkadzalność, napra-wialność, przechowywalność.
3. trwałość i niezawodność

100
trwałość to właściwość obiektu charakteryzująca jego zdolność do zachowa-nia stanu zdatności w określonych warunkach do momentu osiągnięcia stanu gra-nicznego (naprawy głównej, likwidacji fizycznej).
Pod pojęciem stanu zdatności rozumieć należy taki stan niezawodnościowy, w którym obiekt może wykonywać zadania w sposób zgodny z wymaganiami. Z kolei stan niezdatności to taki stan niezawodnościowy, w którym obiekt nie może wykonywać zadań zgodnie z wymaganiami. Natomiast stan graniczny ozna-cza stan fizyczny, w którym dalsza eksploatacja obiektu jest niewskazana lub nie-możliwa.
W sensie wartościującym trwałość określa się sumą okresów, w których obiekt jest w stanie zdatności, wyrażonej ilością wykonanej pracy (np. mtg), długością przebytej drogi (km), liczbą wykonanych czynności lub czasem, w którym obiekt zachowuje określone właściwości, w dopuszczalnych granicach ich zmian.
Nieuszkadzalność jest właściwością obiektu, która charakteryzuje jego zdol-ność do zachowania stanu zdatności podczas wykonywania zadania. W sensie ilo-ściowym nieuszkadzalność określa się jako prawdopodobieństwo ciągłego zacho-wania stanu zdatności podczas wykonywania zadania.
Naprawialność oznacza właściwość obiektu charakteryzującą jego przystoso-wanie do wykonania napraw w określonych warunkach eksploatacji z wykorzysta-niem ustalonych metod i środków naprawczych. W sensie ilościowym naprawial-ność określa się takimi wskaźnikami, jak: prawdopodobieństwo naprawy, średni czas naprawy, intensywność naprawy. W praktyce wskaźniki te są wykorzysty-wane do organizacji racjonalnych systemów obsługiwania obiektów technicznych.
Przechowywalność jest właściwością obiektu charakteryzującą jego zdolność do zachowania stanu zdatności w czasie przechowywania. Właściwość ta oznacza zdolność obiektu do przeciwstawiania się ujemnym wpływom warunków prze-chowywania na jego trwałość i nieuszkadzalność.
Gotowość – zdolność obiektu do natychmiastowego wykonywania zadań w losowym czasie i miejscu. W sensie wartościującym gotowość jest to prawdo-podobieństwo, że obiekt przystąpi do realizacji założonych zadań we właściwym czasie i we właściwym miejscu, a po ich zakończeniu będzie gotowy do realizacji kolejnych zadań.
Obiekty techniczne z punktu widzenia ich niezawodności (R), trwałości (T) i gotowości (G) dzieli się na osiem klas, a mianowicie [2]:
– obiekty typu I – obiekty, którym nie stawia się żadnych wymagań jako-ściowych związanych z ich niezawodnością, trwałością i gotowością,
– obiekty typu R, co do których podstawowymi wymaganiami są wymaga-nia niezawodnościowe,
– obiekty typu T, co do których podstawowymi wymaganiami są wymaga-nia trwałościowe,

101
– obiekty typu RT, co do których podstawowymi wymaganiami są zarówno wymagania niezawodnościowe, jak i trwałościowe,
– obiekty typu G, co do których podstawowymi wymaganiami są wymaga-nia gotowościowe,
– obiekty typu RG, co do których podstawowymi wymaganiami są zarówno wymagania niezawodnościowe, jak i gotowościowe,
– obiekty typu TG, co do których podstawowymi wymaganiami są zarówno wymagania trwałościowe, jak i i gotowościowe,
– obiekty typu RTG, co do których wszystkie wymagania w zakresie nieza-wodności, trwałości i gotowości są jednakowe.
Rozwiązanie problemów niezawodności obiektów mechanicznych sprowadza się do [7]:
– opracowania sformalizowanych modeli oceny niezawodności,– ustalenia optymalnych rozwiązań konstrukcyjnych,– ustalenia optymalnego doboru technologii wytwarzania,– prognozowania niezawodności maszyn w trakcie ich eksploatacji,– opracowania efektywnych systemów eksploatacji w sensie niezawodności.
W systemie badań niezawodności obiektów mechanicznych stosowane są metody [4]:
– badań modelowych, w tym badań symulacyjnych;– badań stanowiskowych;– badań eksploatacyjnych (statystycznych i programowanych);– badań eksploatacyjno-stanowiskowych.Badania niezawodnościowe pozwalają ustalić „słabe ogniwa” obiektu, a więc
te elementy, które należy diagnozować w pierwszej kolejności. Umożliwiają także ustalenie średniego czasu właściwego funkcjonowania między kolejnymi uszko-dzeniami, które są przybliżonymi terminami diagnozowania obiektów technicz-nych.
Zespół czynności doprowadzający obiekt uszkodzony do stanu zdatno-ści nazywamy odnową. Celem odnowy jest przywrócenie cechom charaktery-zującym dany obiekt własności początkowych lub wartości do nich zbliżonych poprzez założony sposób działania, np. obsługę techniczną czy też wymianę danej maszyny na nową.
Rozróżnia się odnowę potencjału eksploatacyjnego, zasobu pracy użytecznej (resursu eksploatacyjnego) oraz stanu zdatności.

102
3.2. Rodzaje uszkodzeń
W procesie eksploatacji części maszyn ulegają trwałym, nieodwracalnym zmianom prowadzącym do utraty własności początkowych. Zmiany te, do któ-rych zalicza się procesy zużyciowe, prowadzą do powstawania uszkodzeń, mimo że obiekt był prawidłowo skonstruowany, wytworzony i eksploatowany.
Z chwilą wyprodukowania elementu można z dużym prawdopodobieństwem przyjąć, że wartości wszystkich cech opisujących element mieszczą się w dopusz-czalnych dla nich granicach (element jest w stanie zdatności). Na skutek oddzia-ływania otoczenia (czynniki zewnętrzne) oraz realizacji przez obiekt przewidzia-nych zadań (czynniki robocze) początkowe wartości cech elementu ulegają zmia-nie. Jeżeli wartość jakiejkolwiek z cech opisujących element przekroczy dopusz-czalny dla niej przedział wartości, element uznajemy za uszkodzony (rys. 3.1). Poprzez uszkodzenie (PN-80/N-04000) należy rozumieć zdarzenie losowe pole-gające na przejściu obiektu ze stanu zdatności do stanu niezdatności.
O stanie obiektu można mówić na podstawie cech przyjętych do jego opisu. Cechy te ze względu na możliwość ich ustalenia dzieli się na mierzalne – CM i nie-mierzalne – CN.
Teoretycznie biorąc, stan obiektu w chwili ti wyznacza zbiór wartości chwilo-wych cech opisujących obiekt:
Si = {Cj(t) = Cj(ti); j=1, J}
gdzie: Si – i-ty stan obiektu, Cj – j-ta cecha obiektu (j=1...., J, J – liczba cech), Cj(ti) – wartość j-tej cechy w chwili ti.
Spośród wielu możliwych stanów, w jakich może znaleźć się obiekt, wyróż-niamy w szczególności dwa, tj. stan zdatności i stan niezdatności. Pierwszy ozna-cza taki stan, w którym obiekt mimo pewnych zmian swych cech zachowuje zdat-ność do realizacji nałożonych funkcji zgodnie z przeznaczeniem. Drugi zaś ozna-cza stan, w którym obiekt zdolność tę utracił, bądź jej nie osiągnął. Zachowanie przez obiekt stanu zdatności oznacza zachowanie przez cały zbiór cech {Cj} warto-ści z przedziału utożsamionego z tym stanem (rys. 3.1):
(3.2)
Natomiast obiekt traci zdatność wtedy, kiedy jakakolwiek cecha przybiera wartość spoza tego przedziału,

103
(3.3)
gdzie: – oznaczają dolne i górne wartości i-tego obiektu dla j-tej cechy.
Ze względów czysto praktycznych w przypadku cech mierzalnych przyjmuje się przedziały dopuszczalnych wartości tych cech. Przedziały te są wyznaczone przez dolną i górną wartość tego przedziału, przyjętą za dopuszczalną dla danej cechy (stany graniczne).
W przypadku cech niemierzalnych odpowiednikiem przedziału są pewne charakterystyki opisowe. Mogą to być określenia werbalne typu: dobry, zły, mały, duży itp. Jeżeli rozpatrywana cecha niemierzalna jest adekwatna do przyjętego wzorca tej cechy, to wtedy stwierdzamy, że ze względu na tę cechę obiekt znajduje się w stanie odpowiadającym danemu wzorcowi.
Rys. 3.1. Interpretacja graficzna uszkodzenia [5].
Niech z każdą j-tą cechą obiektu związany jest pewien obszar Fj zawierający zbiór wartości odpowiadających stanowi zdatność ze względu na CMj – tę cechę. Jeżeli w dowolnej chwili czasu t cecha CMj przybiera wartość spoza tego obszaru, to oznacza to wystąpienie uszkodzenia.

104
Przejście elementu, a niekiedy i całego obiektu, ze stanu zdatności w stan nie-zdatności może mieć charakter oraz wynikać z przyczyn, które scharakteryzować można zgodnie z rysunkiem 3.2. Uszkodzenie, z punktu widzenia zjawiska fizycz-nego, może być związane ze zniszczeniem elementu lub jego powierzchni, np.: złamanie, wykruszenie, zużycie, korozja, starzenie i niezwiązane ze zniszczeniem, np. zatkanie przewodów dopływu paliwa, oleju, innej cieczy, poluzowanie połą-czeń, zanieczyszczenie styków itp. W związku z występującymi uszkodzeniami zachodzi potrzeba albo wymiany elementów, albo oczyszczenia lub regulacji.
Przebieg procesów zużyciowych zachodzących w elementach maszyn zależy od:
– losowo zmiennych wartości własności początkowych, – losowo zmiennych w czasie wartości czynników wymuszających (robo-
czych i zewnętrznych) działających na element.Czynniki wymuszające, mające zasadniczy wpływ na rodzaj procesu zużycia,
można podzielić ma następujące grupy:– rodzaj i kształt współpracującego elementu,– rodzaj ruchu względnego i jego prędkość,– rodzaj obciążenia i jego wielkość,– warunki smarowania,– warunki chłodzenia,– charakter oddziaływania środowiska.
Rys. 3.2. Kryteria podziału i usuwania uszkodzeń [5].
Biorąc pod uwagę charakter zmian wartości wymuszeń (obciążeń) działają-cych na obiekt, wyróżnia się:
– uszkodzenia od bodźców skokowych (nagłe), powstające w wyniku działania bodźców skokowych, których wartości przekroczyły ustalone wartości dopuszczalne; uszkodzeń nagłych nie można przewidzieć, gdyż

105
powstają one niezależnie od tego, jak długo eksploatowany był obiekt oraz w jakim był stanie przed uszkodzeniem,
– uszkodzenia od bodźców kumulujących (naturalne), będące wynikiem nieodwracalnych zmian właściwości początkowych obiektu, zachodzących podczas eksploatacji, pomimo że obiekt był prawidłowo skonstruowany, wytworzony i eksploatowany; uszkodzenia zużycia powstają od bodźców, które kumulują się w czasie jego użytkowania; uszkodzenia te można prze-widzieć mając wyniki pomiarów wartości parametrów diagnostycznych,
– uszkodzenia od bodźców relaksacyjnych – będące wynikiem pośred-niego oddziaływania bodźców kumulujących się i skokowych; uszkodze-nia występują w wyniku zmian stanu w sposób skokowy i wynikają z dzia-łania bodźców kumulujących się,
– uszkodzenia z przyczyn niezależnych – uszkodzenia powstające w wyniku nałożenia się kilku przyczyn działających jednocześnie.
3.3. Wskaźniki niezawodności
Do oceny niezawodności obiektów technicznych wykorzystuje się charakte-rystyki, które są nazywane wskaźnikami niezawodności, przez które rozumie się miarę, w odniesieniu do probabilistycznego opisu niezawodności, funkcję lub wielkość używaną do opisu zmiennej losowej lub procesu losowego. Niżej wymie-niono główne grupy oceny niezawodnościowej obiektu określane na podstawie informacji eksploatacyjnej. Należą do nich [1]:1. Liczbowe wskaźniki niezawodności takie, jak liczba uszkodzeń na jed-
nostkę czasu funkcjonowania obiektu, gotowość obiektu itp. Do ich wyzna-czenia wystarczają informacje typu: łączny czas funkcjonowania, łączny czas naprawy, łączna liczba uszkodzeń w zadanym przedziale czasu eksploatacji.
2. Funkcyjne wskaźniki niezawodności takie, jak: funkcja niezawodności, funkcja intensywności uszkodzeń, funkcja wiodąca rozkładu, funkcja odnowy itp. Celem badań może być wyznaczenie wartości chwilowych wymienionych funkcji (metody nieparametryczne) lub wartości parametrów modeli mate-matycznych rozkładu zmiennych losowych (np. czas funkcjonowania między uszkodzeniami, czas trwania odnowy itp.). Przy wyznaczaniu funkcyjnych wskaźników niezawodności niezbędna jest znajomość historii stanów bada-nych obiektów.
3. Parametryczna niezawodność obiektu, np. prawdopodobieństwo zgodności cech mierzalnych obiektu z wymaganiami w zadanym przedziale czasu eks-ploatacji.
4. Modele procesu powstawania uszkodzeń, które są wyznaczane na podsta-wie analizy fizyko-chemicznej procesów zachodzących w obiekcie (korozja,

106
zmęczenie, itp.). Informacja niezbędna do syntezy modeli procesu powsta-nia uszkodzeń może być uzyskiwana w procesie analiz technicznych przyczyn uszkodzeń lub w procesie wykonywania zabiegów obsługowych.
5. Diagnozowanie stanu niezawodnościowego obiektu, np. wyznaczanie ten-dencji zmian wskaźników niezawodności, ustalanie „słabych ogniw” itp. Do diagnozowania aktualnego stanu niezawodnościowego obiektu niezbędna jest informacja zebrana z wielu przedziałów czasowych, znajomości skutków uszkodzeń ze względu na bezpieczeństwo, wykonanie zadania, poniesionych nakładów na naprawy itp. Do wygenerowania diagnozy są niezbędne wielo-letnie banki informacji o uszkodzeniach obiektów z uwzględnieniem różnego rodzaju skutków uszkodzeń.
6. Prognozowanie występowania stanów niezawodnościowych obiektu. W celu dokonania prognozy niezbędna jest znajomość modeli matematycz-nych procesu powstawania prognozowanych uszkodzeń. Do wyznaczenia tych modeli niezbędne jest zbieranie informacji w czasie czynności obsługo-wych, np. wartości cech obiektów podlegających kontroli lub regulacji.
7. Wyznaczanie skuteczności działań obsługowych, np. wykrywalność uszko-dzeń w różnych obsługach (kontrola stanu, profilaktyka), wystarczalność czę-ści zamiennych, stopień wykorzystania oprzyrządowania obsługowego itp. Potrzebne informacje zbierane są w czasie obsługiwań technicznych i napraw. Na podstawie wskaźników skuteczności działania obsługowego podejmowane mogą być decyzje modernizacyjne.Teoria i badania niezawodności obiektów technicznych są rozwijane przy
wykorzystaniu ujęcia systemowego, z uwzględnieniem:– złożoności struktury,– zmienności lub przypadkowości wartości parametrów,– występowania ogniw antropotechnicznych w układzie sterowania,– nieliniowości charakterystyk,– losowości oddziaływania otoczenia na maszyny,– zmienności warunków funkcjonowania i sterowania.Do podstawowych wskaźników niezawodności można zaliczyć:
1. Prawdopodobieństwo poprawnego funkcjonowania do uszkodzenia, jest to zdarzenie, że w przedziale czasu <0, t> obiekt nie uszkodzi się:
(3.4)
gdzie: T – zmienna losowa, określająca czas przebywania obiektu w stanie zdatności; f(t) – funkcja gęstości rozkładu prawdopodobieństwa zmiennej losowej T.
Prawdopodobieństwo poprawnego funkcjonowania obiektu jest nazywane funk-cją niezawodności. Jeżeli jest znana funkcja niezawodności w całym przedziale czasu (rys. 3.3), charakteryzuje ona w sposób jednoznaczny niezawodność danego obiektu.
∫∞
=≥=t
dtftTPtR t)(}{)(

107
Rys. 3.3. Przebieg przykładowej funkcji niezawodności R oraz zawodności (dystrybuanty) F.
2. Prawdopodobieństwo P{t < t} zdarzenia, że w przedziale czasu <0, t> obiekt uszkodzi się nazywamy funkcją zawodności F(t) (funkcją „śmierci”):
(3.5)
Maszyny i urządzenia można podzielić na dwie grupy: naprawialne i niena-prawialne (odnawialne i nieodnawialne). W pierwszym przypadku konstruktor zakłada możliwość naprawy (odnowy) poprzez np. wymianę części czy też rege-nerację. W drugim przypadku obiekt techniczny po osiągnięciu stanu granicz-nego ulega fizycznej likwidacji. W związku z tym miary niezawodności można podzielić na dwie grupy:
– wskaźniki charakteryzujące niezawodność obiektów odnawialnych (naprawialnych),
– wskaźniki charakteryzujące niezawodność obiektów nieodnawialnych (nienaprawialnych).
3.4. Niezawodność obiektów nieodnawialnych
Najczęściej stosowanymi wskaźnikami charakteryzującymi niezawodność obiektów nienaprawialnych (do pierwszego uszkodzenia) są:
– wartość oczekiwana czasu poprawnego funkcjonowania do pierwszego uszkodzenia (utożsamiana z trwałością),
– prawdopodobieństwo poprawnego funkcjonowania – funkcja niezawod-ności R(t),
– prawdopodobieństwo uszkodzenia opisywane dystrybuantą F(t) zmiennej losowej T,

108
– gęstość prawdopodobieństwa (częstość) uszkodzeń f(t),– intensywność uszkodzeń, nazywana też funkcją ryzyka l(t).Oszacowanie statystyczne funkcji niezawodności określone jest wzorem:
(3.6)
gdzie: n(t) – liczba obiektów, które w przedziale czasu <0, t> nie uszkodziły się; n – liczba badanych obiektów technicznych.
Oszacowanie statystyczne funkcji zawodności określa wzór:
(3.7)
gdzie: m(t) – liczba obiektów uszkodzonych w przedziale czasu <0, t>.Średni czas TS poprawnego funkcjonowania do wystąpienia uszkodzenia
(MttF Mean Time to Failure) jest to wartość oczekiwana zmiennej losowej T do pierwszego uszkodzenia:
(3.8)
Oszacowanie statystycznie tego wskaźnika określa wzór:
(3.9)
gdzie: n – liczba badanych obiektów; ti – czas, w którym nastąpiło uszkodzenie i-tego obiektu.
Funkcja gęstości prawdopodobieństwa określana jest z zależności (rys. 3.4):
(3.10)
Rys. 3.4. Przykładowa funkcja gęstości prawdopodobieństwa: empiryczna f*(T) i teore-tyczna f(T).
ntntR )()( =
ntmtF )()( =
∫∞
==t
S dtftTET t)()(
∑=
=n
iiS t
nT
1
1

109
Intensywność uszkodzeń l(t) jest to gęstość warunkowa uszkodzenia w chwili t pod warunkiem, że do tej chwili obiekt funkcjonował bez uszkodzenia:
(3,11)
Oszacowanie statystyczne l(t) z próbki określa wzór:
(3.12)
gdzie: n(t) – liczba obiektów, które w przedziale czasu <0, t> nie uszkodziły się, n(t+Dt) – liczba obiektów, które w przedziale czasu <0, t+Dt> uszkodziły się, Dt – długość przedziału czasu, w którym obiekt jest badany.
Intensywność uszkodzeń charakteryzuje prawdopodobieństwo powstawania uszkodzeń w chwili t+Dt pod warunkiem, że w chwili t obiekt był w stanie zdat-ności. Oznacza ona względny spadek niezawodności na jednostkę czasu. Inaczej jest to frakcja obiektów uszkodzonych, odniesiona do liczby obiektów na początku ich przedziału badania.
Typowa funkcja intensywności uszkodzeń jest kompozycją trzech rozkła-dów elementarnych (rys. 3.5). Okres pierwszy dotyczy początkowego czasu eks-ploatacji obiektu. W tym okresie obserwuje się znaczną intensywność uszkodzeń w obiekcie. Tłumaczy się to tym, że w początkowym okresie eksploatacji główną przyczyną uszkodzeń są różnego rodzaju uszkodzenia produkcyjne, ukryte wady elementów, wady montażowe itp. Czas trwania pierwszego okresu zależy od typu obiektu, jego jakości, jakości zastosowanych w nim elementów itp.
Rys. 3.5. Ilustracja zmiany intensywności uszkodzeń w funkcji czasu: 1 – uszkodzenia wczesne, 2 – uszkodzenia starzeniowe, 3 – uszkodzenia losowe, 4 – wynikowa funkcja intensywności uszkodzeń l(t)[5].
)()()(
tRtft =l
ttnttntnt
D⋅D+-
=)(
)()()(l

110
Okres drugi jest nazywany zazwyczaj okresem normalnej eksploatacji obiektu. Charakteryzuje się on obniżoną i praktycznie stałą intensywnością uszkodzeń. W tym okresie uszkodzenia posiadają przeważnie charakter przypadkowy i pod-legają wykładniczemu prawu niezawodności. Czas trwania drugiego okresu dla obiektu zależy przede wszystkim od średniej trwałości zastosowanych w nim ele-mentów oraz od warunków eksploatacji. Okres ten charakteryzuje trwałość całego obiektu.
Okres trzeci jest uwarunkowany procesem zużywania się wszystkich elemen-tów obiektów i charakteryzuje się znacznym wzrostem intensywności uszkodzeń. Większość uszkodzeń obiektu w tym okresie to uszkodzenia naturalne, wynika-jące z rzeczywistego zużycia się elementów i destrukcyjnego oddziaływania czyn-ników zewnętrznych i roboczych.
3.5. Niezawodność obiektów odnawialnych
Na proces odnowy obiektów technicznych składają się następujące czasy:– niezbędny na stwierdzenie uszkodzenia,– identyfikacji uszkodzenia (diagnostyki),– oczekiwania na naprawę,– właściwej naprawy,– pomocniczy w naprawie,– oceny jakości naprawy. W praktyce eksploatacyjnej mamy do czynienia z dwoma modelami eksplo-
atacji: o natychmiastowej odnowie (z zerowym czasem odnowy) oraz o określo-nym czasie odnowy (alternatywny strumień odnowy) (rys. 3.6).
Rys. 3.6. Model eksploatacji obiektu: a) o pomijalnym czasie odnowy, b) o określonym czasie odnowy.

111
W modelu odnowy natychmiastowej obiekt funkcjonuje poprawnie od chwili t0 do chwili pierwszego uszkodzenia i jednocześnie pierwszego odnowienia t1, od tej chwili funkcjonuje poprawnie do drugiego uszkodzenia i zarazem drugiego odnowienia t2 itd. Czas funkcjonowania T do uszkodzenia obiektu jest zmienną losową, natomiast chwile t1, t2, tn+1 są chwilami uszkodzeń i jednocześnie odnowień obiektu i nazywane są procesem odnowy obiektu. Poszczególne przedziały czasowe są realizacjami zmiennych losowych T1, T2, Tn+1. Tworzą one strumień odnowy.
W przypadku modelu z niepomijalnym czasem odnowy chwile t1, t3, tn-1 są chwilami uszkodzeń, zaś chwile t2, t4, tn+1 są chwilami zakończenia odnowy. Czasy trwania odnów U1, U2, Un są zmiennymi losowymi.
Przy założeniu, że występujące w strumieniu odnowy zmienne losowe są niezależne, wówczas do analizy niezawodności wystarcza znajomość rozkładów prawdopodobieństwa poszczególnych zmiennych losowych wraz z wybranymi momentami rozkładów. Strumień odnowy nazywa się prostym wówczas, gdy wszystkie tworzące go zmienne losowe mają taki sam rozkład, a przypadku gdy jest to rozkład wykładniczy, strumień odnowy nazywany jest strumieniem Pois-sona.
Strumień odnowy można scharakteryzować za pomocą procesu losowego {N(t), ≥ 0}, gdzie N(t) dla każdego ustalonego t jest zmienną losową wyrażającą liczbę uszkodzeń i odnów występujących w przedziale czasowym (0,t). Proces ten nazywany jest procesem odnowy.
Najczęściej stosowanymi wskaźnikami charakteryzującymi niezawodność obiektów odnawialnych, przy założeniu, że zarówno czasy poprawnego funkcjo-nowania oraz czasy napraw – i-tego elementu mają jednakowy rozkład prawdo-podobieństwa, są:– model probabilistyczny czasu zdatności – funkcja niezawodności R(t),
F(t) = 1 – R(t) = P{Tn < t} n = 1,2,...N
– model probabilistyczny czasu odnowy G (t),
G(t) = P{Un < t} n = 1,2,...N
– funkcja odnowy H(t).Funkcja odnowy H opisuje oczekiwaną liczbę uszkodzeń (0,t) i wyznacza się
ją z zależności: H (t) = E[N(t)] t ≥ 0 lub H (t) = suma od i=1 do nieskończono-ści Fn(t), gdzie Fn(t), – dystrybuanta punktów odnowy ti(i – 1,2,3.....), czyli sumy zmiennych losowych Gn,– średni czas poprawnego funkcjonowania.
Średni czas tn poprawnego funkcjonowania między dwoma kolejnymi uszkodzeniami (MtBF Mean Time between Failure) – jest to wartość oczeki-wana zmiennej losowej Tn, określającej czas użytkowania między dwoma kolej-nymi uszkodzeniami:

112
(3.15)
Oszacowanie statystyczne tego wskaźnika określa wzór:
(3.16)
gdzie: k – liczba badanych obiektów, z których każdy jest po (n-1)-tej naprawie; tni – czas przebywania i-tego obiektu w stanie zdatności od chwili zakoń- czenia (n-1)-tej naprawy do wystąpienia k-tego uszkodzenia.
– średni czas odnowy,Średni czas Un odnowy (MttR – Mean Time To Repair) – jest to wartość
oczekiwana zmiennej losowej Gk usunięcia uszkodzenia:
(3.17)
Oszacowanie statystyczne tego wskaźnika określa wzór:
(3.18)
gdzie: k – liczba badanych obiektów, z których każdy jest po (n-1)-tej czasie zdatności; gni – czas odnowy i-tego obiektu.
– współczynnik gotowości,Gotowość (availability) obiektu w chwili t definiuje się jako prawdopodobień-
stwo, że w chwili tej obiekt znajduje się w stanie zdatności. Asymptotyczna war-tość współczynnika gotowości wyznaczana jest z zależności:
(3.19)
gdzie: E(Tn) – wartość oczekiwana zmiennej losowej czasu zdatności, E(Gn) – wartość oczekiwana zmiennej losowej czasu odnowy.
W teorii niezawodności do estymacji wskaźników niezawodności stosuje się następujące rozkłady zmiennej losowej:– rozkład wykładniczy (rys. 3.7) - stosowany jest do opisu zmiennej losowej
czasu zdatności, w których uszkodzenia występują z przyczyn skokowych i ze stałym natężeniem; w tym przypadku intensywność uszkodzeń jest stała,
∑=
=n
iinS t
kT
1
1
∑=
=n
iinS g
kG
1
1
)()()(
nn
n
GETETE+

113
Rys. 3.7. Charakterystyka funkcji opisujących rozkład wykładniczy [7].
– rozkład Weibulla (rys. 3.8) – rozkład charakteryzuje się zmienną intensyw-nością uszkodzeń o przebiegu monotonicznym; rodzina rozkładów Weibulla jest dwuparametrową rodziną, dlatego dowolny rzeczywisty rozkład o wiele lepiej można przybliżyć rozkładem Weibulla niż rozkładami wykładniczymi; rozkładem tym opisuje się uszkodzenia powstałe w wyniku nakładania się przyczyn uszkodzenia, tj. zużycia naturalnego oraz chwilowych przeciążeń,
Rys. 3.8. Charakterystyka rozkładu Weibulla [7].
1
0
0,5l l(t) = = const
R(t)f(t)
t
a < 1
a = 1
a > 1
1,0R(t)
R(t)e -( t)β a
, t > 00, t < 0
a > 1
a = 1
a < 1
l(t)
l(t)aβ ta , t > 00, t < 0
a-1

114
– rozkład normalny (rys. 3.9) – opisuje zmienną losową czasu zdatności, w któ-rych uszkodzenia występują z przyczyn kumulujących się, stopniowych,
Rys. 3.9. Charakterystyki funkcyjne rozkładu normalnego [7].
– rozkład logarytmo-normalny – ma zastosowanie w razie uszkodzeń powo-dowanych stopniowymi powiększającymi się zużyciami zmęczeniowymi.

115
3.6. Niezawodność układów złożonych
Każdy złożony układ techniczny traktowany jest jako system. Ma zatem swoją strukturę zewnętrzną – zobrazowaną jako funkcje, i wewnętrzną – zobrazowaną jako strukturę. Poprzez strukturę należy rozumieć wewnętrzną budowę ukształ-towaną w wyniku funkcjonalnego rozmieszczenia elementów składowych, wcho-dzących w skład podzespołów lub zespołów celem realizacji przewidzianych funk-cji. Teoria eksploatacji obejmuje trzy koncepcje modeli:
– model funkcjonalny – system przedstawia się jako „czarną skrzynkę”, w której kontakt z otoczeniem następuje przez wejście i wyjście,
– model strukturalny („biała skrzynka”) – koncepcja polegająca na tym, że system traktowany jest jako całość wzajemnie powiązanych elementów o zidentyfikowanych cechach,
– model hierarhiczny – koncepcja uwzględniająca stosunki podrzędności i nadrzędności.
W złożonych obiektach technicznych wyróżniamy następujące struktury nie-zawodnościowe (rys. 3.10):
– szeregową, w której obiekt jest w stanie zdatności, gdy wszystkie elementy są w stanie zdatności,
– równoległą, w której obiekt jest w stanie zdatności, gdy choć jeden ele-ment jest w stanie zdatności; obiekt jest uszkodzony, gdy wszystkie jego elementy są uszkodzone,
– mieszaną-szeregowo – równoległą, równoległo-szeregową, progową lub inną.
Rys. 3.10. Struktury niezawodnościowe obiektów technicznych.

116
Wśród elementów obiektów technicznych wyróżnia się dwie podstawowe grupy:
– aktywne, warunkujące bezpośrednie funkcjonowanie obiektu: podsta-wowe – wykonujące istotne funkcje dla zespołu, rezerwowe – przejmujące ich zadanie w razie uszkodzenia,
– pasywne – wpływające na wygodę użytkowania, jakość, estetykę.
Funkcja niezawodności R(t) obiektu zbudowanego z elementów funkcjonu-jących w strukturze szeregowej, w przypadku kiedy uszkodzenia jego elementów składowych są uszkodzeniami wzajemnie niezależnymi, jest iloczynem postaci:
(3.20)
Ri(t) – niezawodność i –tego elementu wchodzącego w skład struktury sys-temu
Szeregowemu połączeniu elementów w sensie niezawodności niekoniecz-nie musi odpowiadać struktura funkcjonalna obiektu. Z przedstawionego prawa iloczynu wyznaczania niezawodności układu szeregowego wynikają następujące zależności:
– system szeregowy ma mniejszą niezawodność, jeżeli więcej obiektów połączy się w szereg(rys. 3.11), np.:
a) R1= R2= 0,9; Rs1 = R1. R2 = 0,81
b) R1= R2= R3 = 0,9; Rs2 = R1. R2. R3. = 0,729; Rs1 > Rs2
Rys. 3.11. Niezawodność sytemu szeregowego jako funkcja liczby obiektów składo-wych [7].
– niezawodność sytemu szeregowego nie może być większa od niezawodno-ści obiektu najbardziej zawodnego, wchodzącego w jego skład:
R1= 0,6, R2= 0,5, R3 = 0,8;
Rs = R1. R2. R3 = 0,6. 0,5. 0,8 = 0,24
∏=
=⋅⋅⋅=n
iin tRtRtRtRtR
121 )()()()()(
R1 R2 R2 Rn
0 10 20 30 40 50 60 n
1,0
0,8
0,6
0,4
0,2
0,80,5 0,90,95
0,97
0,98
0,99
0,998
R=0,999

117
W systemach składających się z wielu obiektów znaczne zwiększenie nieza-wodności jednego obiektu nie wpływa istotnie na niezawodność całego sytemu, np. system składa się ze 100 obiektów o trzech wariantach niezawodności obiek-tów:a) podstawowy:
R1 – 99 = 0,99 R100 = 0,5
Rs1 = R1 – 99. R100 = 0,9999. 0,5 = 0,185
b) zwiększono niezawodność „najsłabszego ogniwa” o 0,2, zatem:
R1 – 99 = 0,99 R100 = 0,7
Rs2 = R1 – 99. R100 = 0,9999. 0,7 = 0,259
c) zwiększono niezawodność każdego z 99 obiektów o 0,005, zatem:
R1 – 99 = 0,995 R100 = 0,7
Rs3 = R1 – 99. R100 = 0,99599. 0,7 = 0,304
Największy przyrost niezawodności wystąpił w wariancie c, co oznacza, że istotne zwiększenie niezawodności systemu następuje przy nawet nieznacznym zwiększeniu niezawodności dużej liczby elementów składowych, a nie przy istot-nym zwiększeniu niezawodności „najsłabszego ogniwa”.
Funkcję niezawodności obiektu o strukturze równoległej można wyznaczyć z zależności:
(3.21)
Z przedstawionego równania wynikają następujące wnioski (rys. 3.12):– niezawodność systemu równoległego jest zawsze większa od niezawodności
jego najbardziej niezawodnego elementu, np.:
R1= 0,8 R2= 0,9; Rs = 1- (1 - R1). (1 - R2) = 1 – (1-0,8). (1 – 0,7) = 0,94
– niezawodność systemu równoległego zwiększa się wraz ze zwiększeniem się liczby jego elementów, np.:
a) R1= R2= 0,8; Rs1 = 1 – (1- R1). (1 - R2) = 1 – (1- 0,8). (1 – 0,8) = 0,96
b) R1= R2= R3 = 0,8; Rs2 = 1 – (1- R1). (1 - R2). (1 – R3) = 1 – (1- 0,8). (1 – 0,8). (1 – 0,8) = 0,992
Rs1 < Rs2
[ ]∏=
--=n
ii tRtR
1
)(11)(

118
Rys. 3.12. Niezawodność sytemu równoległego jako funkcja liczby jego elementów skła-dowych [7].
Funkcja niezawodności obiektu złożonego ze struktury mieszanej jest opisana wzorem:
(3.22)
Stosowanie różnych struktur niezawodnościowych stwarza teoretycznie duże możliwości podnoszenia niezawodności obiektów technicznych. Jednak w prak-tyce stosowanie tych struktur lub ich kombinacji jest ograniczone względami kon-strukcyjnymi, technologicznymi, ekonomicznymi oraz masą obiektu. Zazwyczaj zwiększenie niezawodności obiektu o strukturze szeregowej osiąga się drogą eli-minacji tzw. „słabych ogniw” obiektu.
Jedną z metod zwiększania niezawodności obiektów, która umożliwia teore-tycznie w sposób nieograniczony podnoszenie ich niezawodności, jest rezerwo-wanie. Metoda ta polega na tym, że dla elementów lub zespołów przewiduje się jeden lub kilka elementów zapasowych, które w miarę występowania uszkodzeń zastępują (przejmują) funkcję elementów uszkodzonych. Zazwyczaj zwiększenie niezawodności obiektu o strukturze szeregowej osiąga się drogą eliminacji tzw. „słabych ogniw” obiektu. Element rezerwowy może funkcjonować jednocze-śnie z podstawowym lub też może być włączany automatycznie (bez przerywania funkcjonowania całego obiektu) w jego miejsce w przypadku wystąpienie uszko-dzenia. Rozróżnia się następujące rodzaje rezerwowania:
– rezerwa gorąca (obciążona) – elementy rezerwowe znajdują się w takim samym stanie eksploatacyjnym, jak element podstawowy (funkcjonują
R1
R2
Rn
0
0,5
0,6
0,7
0,8
0,9
1,0Rr
Ri
k=1
k=2
k=3
k=4
1,0 0,9 0,8 0,7 0,6 0,5

119
jednocześnie), np. silnik w samolocie; stąd też mogą ulec uszkodzeniu przed uszkodzeniem elementu podstawowego,
– rezerwa ciepła (częściowo obciążona) – elementy rezerwowe są w stanie oczekiwania, częściowo obciążone i mogą się uszkodzić, ale z mniejszym prawdopodobieństwem; przykładem tego rodzaju rezerwowania jest np. kocioł w ciepłowni; elementy rezerwowe są włączone na stałe,
– rezerwa zimna (nieobciążona) – elementy rezerwowe są w stanie oczeki-wania i w wyniku funkcjonowania obiektu technicznego nie są obciążone, np. agregaty prądotwórcze w szpitalach. Przyjmuje się, że elementy rezer-wowe w stanie oczekiwania są w stanie sprawności technicznej. W tego rodzaju rezerwie kryje się zatem największy potencjał sprawczy.
3.7. Metody zwiększania niezawodności
Kształtowanie niezawodności obiektów może być przeprowadzane we wszyst-kich fazach istnienia obiektu, tj.: projektowania, wytwarzania i eksploatacji. Z punktu widzenia metodologicznego zmianę niezawodności systemów można realizować poprzez:
– oddziaływanie na niezawodność elementów,– oddziaływanie na strukturę niezawodnościową,– oddziaływanie na niezawodność elementów i strukturę niezawodno-
ściową sytemu.Kształtowanie niezawodności obiektów winno uwzględniać uwarunkowania
przedstawione na rysunku 3.13. Dla każdego obiektu można wyznaczyć mini-malne koszty całkowite, obejmujące koszty opracowania założeń, projektowania, wytwarzania i eksploatacji dla osiągnięcia optymalnej niezawodności obiektu.

120
Rys. 3.13. Wpływ niezawodności na koszty projektowania, wytwarzania i eksploatacji obiektów.Kc – koszt całkowity wytworzenia i eksploatacji. Ko – koszt opracowania założeń. Kp – koszt projektowania. Kw – koszt wytworzenia. Ke – koszt eksploatacji. Ropt – optymalna niezawodność ze względu na koszty [2]
Jednym ze sposobów zwiększania niezawodności obiektów jest modernizacja, którą można zdefiniować jako unowocześnienie prowadzące do wzrostu warto-ści użytkowej środka technicznego po jej przeprowadzeniu, na przykład zainstalo-wanie dodatkowego oprzyrządowania w maszynie w celu zapobiegania uszkodze-niom. Do podstawowych form modernizacji są zaliczane:
– przebudowa (zmiana istniejącego stanu na inny),– rozbudowa (powiększenie, dobudowanie nowych elementów),– rekonstrukcja (odtworzenie na podstawie zachowanych fragmentów),– adaptacja (przystosowanie lub przerobienie do innego użytku).
W celu otrzymania maszyn o odpowiednio dużej niezawodności w trakcie eksploatacji, należy podjąć odpowiednie starania już w fazie projektowania, kon-struowania prototypu, a następnie produkcji. Punktem wyjściowym przy tego rodzaju pracach jest analiza słabych ogniw obiektu. Poprzez słabe ogniwo należy rozumieć każdy element (część) badanej maszyny, którego podatność na uszko-dzenia jest większa od wartości średniej pozostałych. Słabe ogniwa są potencjal-nym źródłem defektów i uszkodzeń całego obiektu. Likwidacja słabych ogniw sta-nowi podstawowe zagadnienie w pracach zapewniania niezawodności, zarówno
R(t)Ropt.
Ke
Ko
Kc
opt.
opt.
opt.
K
Ke
Ko = Kp + Kw
Kc

121
w trakcie eksploatacji maszyny, jak i przed tym etapem. Metody zapewniania nie-zawodności maszyn dzieli się zgodnie z podziałem przedstawionym w tabeli 3.1.
tabela 3.1. Metody zapewnienia niezawodności maszyn.
MEtoDy ZAPEWNIANIA NIEZAWoDNoŚCI MASZyN
Przedeksploatacyjne: Eksploatacyjne:• konstrukcyjne (np. zastosowanie
zwiększonych wymiarów geometrycz-nych elementów),
• technologiczne(np. polepszenie wła-ściwości warstwy wierzchniej),
• rezerwowaniestrukturalne:– nadmiar wytrzymałościowy (np.
lepszy materiał konstrukcyjny),– nadmiar parametryczny (np.
zwiększony zakres istotnego para-metru funkcjonalnego w stosunku do standardów),
– nadmiar funkcjonalny (np. trzy układy hamulcowe w pojeździe samochodowym),
– nadmiar informacyjny (np. sygna-lizacja świetlna i dźwiękowa pod-czas cofania ładowarki).
• stabilizacja warunków eksploata-cji,
• utrzymywanie dopuszczalnychparametrów roboczych,
• stabilizacjaobciążeń,• dotrzymanie reżimu przeglądów
technicznych,• diagnostykaon-line,• zapewnieniejakościnapraw,• zapewnienieodpowiedniejjakości
materiałów eksploatacyjnych,• użytkowanieiobsługiwanieprzez
wyszkolony personel.
W wielu przypadkach sens projektowania niezawodnościowego sprowadza się zatem do modelowania statystycznego oraz optymalizacji wieloparametro-wej. Obie te metody mogą się wzajemnie uzupełniać i służyć jako pełnowarto-ściowe narzędzie pracy konstruktora, o ile będą znane określone prawidłowości stochastyczne lub statystyczne. Czynności składające się na proces konstruowania z uwzględnieniem niezawodności można podzielić na następujące etapy:
– zbieranie informacji – badania eksploatacyjne,– tworzenie projektu – analiza i synteza niezawodnościowa,– weryfikacja projektu – symulacyjne metody niezawodności,– tworzenie dokumentacji projektowej i eksploatacyjnej.Rozróżnia się dwie grupy badań eksploatacyjnych;– określające (w warunkach użytkowania), ich celem jest określenie wskaź-
ników niezawodności, najczęściej przeprowadzana jest przez producenta;– kontrolne, których celem jest sprawdzenie wskaźników niezawodności.

122
Najskuteczniejszym sposobem zwiększania niezawodności obiektów tech-nicznych jest stosowanie różnego rodzaju nadmiarów poprzez rezerwowanie. Metoda ta oparta jest na nadmiarowości (redundacji). Wyróżnia się nadmiary [6]:
– parametryczne – właściwości fizyczne są „lepsze” od potencjalnie nie-zbędnych do realizacji założonej funkcji,
– strukturalne – wprowadzanie do struktury urządzenia elementów rezer-wowych, bez których urządzenie to może działać, a które służą tylko do poniesienia jego niezawodności,
– funkcjonalne – inne elementy urządzenia są w stanie przejąć pewne funk-cje elementu uszkodzonego, choć mogą je realizować gorzej,
– informacyjne – stosuje się do wiadomości przesyłanych w systemach transmisji danych lub przechowywanych w systemach gromadzenia danych, aby podnieść niezawodność przekazywanej informacji,
– czasowe – uszkodzenie elementu nie powoduje natychmiastowej niezdat-ności obiektu, dysponuje się pewnym czasem na podjęcie działań prze-ciwdziałających wystąpieniu uszkodzenia urządzenia jako całości,
– wytrzymałościowe – zwiększenie parametrów wytrzymałościowych ele-mentów konstrukcyjnych.
Literatura
1. Bobrowski D., Modele i metody matematyczne teorii niezawodności. WNT. Warszawa 1985.
2. Bucior J., Podstawy teorii i inżynierii niezawodności. Oficyna wydawnicza Poli-techniki Rzeszowskiej. Rzeszów 2004.
3. Kiliński A., Przemysłowe procesy realizacji. Podstawy teorii. Wydawnictwo Naukowo-Techniczne. Warszawa 1976.
4. Migdalski J. (redakcja). Inżynieria niezawodności. ATR. Bydgoszcz 1992.5. Niziński S., Eksploatacja obiektów technicznych. Instytut Technologii Eksplo-
atacji, Radom 2002.6. Pamuła W., Niezawodność i bezpieczeństwo. Wydawnictwo Politechniki Ślą-
skiej 2011.7. Słowiński B., Inżynieria eksploatacji maszyn. Politechnika Koszalińska 2011.

123
4. Podstawy procesów zużyciowych
4.1. Podstawowe pojęcia z tribologii
Tribologia jest nauką o procesach zachodzących w ruchomym styku ciał stałych. Słowo tribologia pochodzi od greckich słów: „tribos” – tarcie i „logos” – słowo, mowa, wiedza. Używa się także pojęć „tribotechnika” – jako określenie przede wszystkim praktycznego zastosowania tribologii, oraz „tribotechnologia” – mająca określać istniejące technologie zmniejszania zużycia materiałów tribo-logicznych. Jednak nazwa „tribologia” jest obecnie najbardziej rozpowszechniona na świecie. W zakres tribologii wchodzą badania nad tarciem, zużyciem i sma-rowaniem zespołów ruchomych w celu poznania tych procesów i umożliwienia racjonalnego sterowania nimi (rys. 4.1).
Rys. 4.1. Triada tribologiczna [6].
Szczególnie dla mechaników, podobnie jak mechanika, wytrzymałość mate-riałów i materiałoznawstwo, tribologia jest fundamentalną wiedzą dla konstruk-cji i eksploatacji ruchomych węzłów maszyn takich, jak: łożyska, prowadnice, przekładnie, sprzęgła, hamulce itp., ze względu na ich sprawność, niezawodność, i trwałość. Intensywne kształcenie w dziedzinie tribologii i wykorzystanie tej wie-dzy w technice przynosi ogromne korzyści wskutek oszczędności uzyskanych dzięki odpowiednim obliczeniom i odpowiednim doborze cech konstrukcyjnych elementów maszyn. Zastosowania tribologii oraz badania nad tarciem i jego skut-kami sięgają epoki odrodzenia, a typowy zespół tribologiczny, jakim jest łożysko ślizgowe, znany był już w starożytności. Badaniom nad zjawiskiem tarcia poświęcił

124
się wielki człowiek renesansu – Leonardo da Vinci (1452–1519). To on po raz pierwszy wprowadził nazwę „siła tarcia” i sformułował pierwszy dwa prawa doty-czące tego zjawiska:
– siła tarcia jest wprost proporcjonalna do obciążenia,– siła tarcia jest niezależna od powierzchni tarcia.Tarcie jest zjawiskiem występującym w przyrodzie bardzo powszechnie. Zja-
wisko to objawia się jako pozytywne (np. chodzenie) lub negatywne (np.: opory przesuwania przedmiotów). Procesy tarcia również w technice należą do najczę-ściej spotykanych. Występują jako zjawiska pozytywne (np. wykorzystanie sprzę-żenia ciernego: w sprzęgłach ciernych, przekładniach ciernych, w styku kół jezd-nych z podłożem, wykorzystanie w hamulcach) oraz negatywne (np. opory ruchu ślizgania lub toczenia: w łożyskach, prowadnicach, przekładniach zębatych itp.).
Procesom tarcia zachodzącym w obrębie określonych układów tribotechnicz-nych towarzyszą straty energetyczne oraz straty wywołane zużyciem: materiałowe i ekonomiczne.
Zachodzące procesy w systemie tribologicznym są trudne do identyfikacji ze względu na wiele zmiennych czynników, które mają wpływ na ich przebieg i wza-jemne relacje między nimi. W ujęciu tribologicznym będziemy postrzegać ciała stałe, ciekle i gazowe jako zbiór elementów cząstek. Cząstki te oddziałują wzajem-nie na siebie siłami przyciągającymi, zwanymi siłami kohezji. Siły kohezji są to zatem siły wzajemnego przyciągania pomiędzy elementami budowy tego samego ciała. Ciało stałe to takie, w którym siły kohezji są największe [3].
W przypadku cieczy siły wzajemnego wiązania są o wiele mniejsze, ale na tyle duże, iż odczuwamy pewne opory, np. przy próbie przemieszczenia ciała wewnątrz cieczy.
W przypadku gazów siły kohezji są zdecydowanie najmniejsze i dlatego mię-dzy innymi gazy zawsze wypełniają całą objętość naczynia.
Każdy element budowy ciała jest energetycznie aktywny w rozumieniu tym, iż oddziałuje przyciągająco na sąsiada. Jeżeli zatem element budowy znajduje się wewnątrz ciała to jego aktywność energetyczna zostaje wysycona we wszystkich kierunkach, bo wszędzie ma „sąsiada”. Natomiast takiego wysycenia nie mamy w przypadku elementu budowy, który znajduje się na powierzchni ciała. Obec-ność tych niewysyconych sił powoduje, iż o powierzchni ciała mówimy, że jest ona energetycznie aktywna. Aktywność powierzchni jest również natury przyciągają-cej. Jeżeli zbliżymy do siebie dwie powierzchnie, to się one wzajemnie przyciągają.
tarciem nazywamy zbiór zjawisk występujących w obszarze styku dwóch przemieszczających się względem siebie ciał, w wyniku których powstają opory ruchu. Miarą tarcia jest opór równoważony wypadkową siłą styczną podczas przemieszczania się jednego ciała względem drugiego. Wartość siły tarcia prze-mieszczających się względem siebie elementów mechanicznych urządzeń zależna jest od chropowatości powierzchni obszarów styku, kinematyki ruchu, obciążenia normalnego, rodzaju materiałów elementów maszyn oraz smarowania.

125
Mimo długotrwałych badań zjawiska tarcia zewnętrznego ciał stałych, towa-rzyszącego nieodłącznie wszelkiemu ruchowi w ośrodku materialnym nie powstała dotychczas ogólna teoria tarcia suchego. Tarcie suche jest zjawiskiem złożonym, niejednorodnym, determinowanym przez zespół różnych zjawisk, zależnych od warunków tarcia oraz parametrów. Począwszy już od wieku XV, (Leonardo da Vinci) wielu wybitnych uczonych przeprowadzało badania doty-czące zagadnień tarcia i formułowało zależności, z których można obliczyć war-tość współczynnika tarcia. Udoskonalane materiały badań oraz aparatura pomia-rowa umożliwiają głębsze i dokładniejsze poznanie natury tarcia. Opracowane na tej podstawie współzależności są słuszne w pewnym zakresie warunków tar-cia. W ten właśnie sposób powstały liczne hipotezy dotyczące tarcia suchego. Najbardziej udokumentowane są grupy hipotez tarcia suchego przedstawione w tabeli 4.1.
Klasyczne prawa tarcia oparte są na następujących założeniach [4]:– siła tarcia jest proporcjonalna do siły normalnej,– współczynnik tarcia nie zależy od nominalnej powierzchni styku,– współczynnik tarcia statycznego jest większy od współczynnika tarcia
kinetycznego,– współczynnik tarcia nie zależy od prędkości poślizgu.Pierwsze prawo jest słuszne w większości wypadków, z wyjątkiem dużych
nacisków wywołujących duże zbliżenie ciał stałych na dużych obszarach rzeczy-wistej powierzchni styku. Drugie prawo jest słuszne tylko dla materiałów o okre-ślonej granicy plastyczności (np. metale). Nie podlegają temu prawu materiały sprężyste i lekkosprężyste (np. elastomery). Trzeciemu prawu nie podlegają mate-riały lekkosprężyste. Czwarte prawo jest w zasadzie niesłuszne. Można je tylko w zakresie małych i średnich prędkości stosować do metali, natomiast nie jest ono ważne dla tworzyw sztucznych.
Miarą tarcia są: siła lub moment wywołane tarciem. Ich wartość określa się przez pomiar wielkości sił i momentów przyłożonych do skojarzenia dla pokona-nia tarcia przeciwdziałającego ruchowi. Opór tarcia określa się zwykle wartością współczynnika tarcia. Tarcie występuje zarówno przy bezruchu, jak i przy ruchu stykających się ciał. Dla celów metodycznych dokonuje się często podziału rodza-jów tarcia zgodnie z rysunkiem 4.2.
tabela 4.1. Hipotezy tarcia suchego [4].
Grupy teorii Nazwa teorii Podstawowe wzory Cechy teorii
Mechaniczne Amontonsa Coulomba
T = µ NT = A + µ N
Teoria pokonywania nierówności powierzchni; nie zależy od N, A nie zależy od rzeczywistego pola styku.

126
Bowdena T = S tpl + Sw pw
Teoria tworzenia i niszczenia szczepień; opory tarcia są sumą oporów ścinania nierówno-ści szczepionych i przepychania odkształconego materiału.
Molekularne
TomlinsonaOpory tarcia są oporami poko-nywania przyciągania molekular-nego.
Dieriagina T=µ(N+No) N = PoSr
Pokonywanie chropowatości molekularnej; nie uwzględnia własności materiału.
Molekularno--mechaniczna Kragielskiego aaµ +==
NS
NT
Tarcie = suma oporów pokony-wania szczepień, chropowatości i przyciągania molekularnego; a= f(ścinania); b = f(powiększania oporu na ścinanie od N).
Gdzie: T – siła tarcia, N – siła skierowana prostopadle do powierzchni tarcia, µ – współczynnik tarcia, A – siła adhezji, tpt – wytrzymałość na ścinanie połączeń tarciowych, S – pole rzutu powierzchni styku, Sw – pole przekroju poprzecznego bruzdy wyciskowej w procesie tarcia, Sr – pole powierzchni rzeczywistego styku, Pw – średni jednostkowy opór wyciskania materiału, Po – średni jednostkowy opór przyciągania molekularnego, E – energia zużywana na rozerwanie pary zetkniętych cząstek, n – liczba par zetkniętych cząstek, p – średnia wartość siły odpychania cząstek, x – droga jednostkowa przemieszczających się cząstek,l – odległość pomiędzy środkami kulistych cząstek,
lxk = α – współczynnik zależny od adhezyjnych własności ciał trących,
β – współczynnik zależny od mechanicznych własności ciał trących.

127
Rys. 4.2. Rodzaje tarcia [1].
Miarą tarcia jest opór równoważony wypadkową siłą styczną w czasie prze-mieszczania się jednego ciała względem drugiego. Podczas przemieszczania wzglę-dem dwóch ciał występuje tarcie kinetyczne (ruchowe), natomiast jeśli względna prędkość obszarów tarcia dwóch ciał równa jest zeru to występuje wówczas tar-cie statyczne (spoczynkowe). Tarcie kinetyczne, ze względu na rodzaj ruchu, dzieli się na tarcie ślizgowe i toczne. Przy tarciu ślizgowym obszarem styku jest powierzchnia płaska lub zakrzywiona. Tarcie wiertne jest szczególnym rodzajem tarcia ślizgowego, w którym obszarem styku jest przekrój kołowy, równocześnie przemieszczający się osiowo (rys. 4.3). W tarciu tocznym obszarem styku elemen-tów jest punkt – tarcie kół lub linia – tarcie ciał o kształtach cylindrycznych lub cylindrycznym i płaskim. Tarcie może też występować w obrębie jednego ciała, w czasie gdy przemieszcza się względem siebie lub stara się wprowadzić w ruch jego poszczególne elementy składowe, np. warstwy, cząsteczki itp. Taki rodzaj tar-cia nazywa się tarciem wewnętrznym, w przeciwieństwie do tarcia zewnętrznego, występującego przy powierzchniowym styku ciał, np. w obszarze styku prze-mieszczających się względem siebie elementów maszyn. Charakter wewnętrznego

128
tarcia zależy od stanu skupienia ciała. W gazach ze względu na duże odległości między cząsteczkami istnieje znaczna swoboda wzajemnego przemieszczania, ponieważ opory tarcia są niewielkie, rosną one wraz ze wzrostem intensywno-ści ruchów termicznych cząstek. W cieczach odległości pomiędzy cząsteczkami są znacznie mniejsze aniżeli w gazach. W skutek tego swoboda przy przemieszcza-niu się ich jest mniejsza. Jeżeli warstwy cząsteczek cieczy znajdują się w zasięgu pola sił ciała stałego, na granicy rozdziału faz: ciecz-ciało stałe, wówczas swoboda przemieszczania tych cząsteczek zostaje mocno ograniczona. Tarcie, które wystę-puje w tych warstwach cieczy, nazywa się tarciem granicznym. W ciałach stałych składowe elementy budowy: atomy, cząsteczki i jony, są rozmieszczane symetrycz-nie – zazwyczaj w siatce krystalicznej – i mają bardzo ograniczoną swobodę prze-mieszczania się. Takie właśnie przemieszczanie występuje przy odkształceniach plastycznych oraz sprężystych. Mechanizm tych przemieszczeń jest zupełnie inny niż w cieczach, jednak w obydwu przypadkach siłami przeciwdziałającymi prze-mieszczaniu elementów są siły spójności (kohezji).
Rys. 4.3. Schematy tarcia ślizgowego: a) model tarcia po płaszczyźnie poziomej, b) model tarcia po równi pochyłej, c) ruch posuwisty, d) ruch posuwisto-zwrotny, e) ruch obrotowy, f) ruch wahadłowy, g) ruch wiertny [1].

129
Z technicznego punktu widzenia najważniejszy jest podział tarcia na: suche, graniczne i płynne. Dla zmniejszania tarcia zewnętrznego staramy się rozdzie-lić trące powierzchnie warstwą substancji smarującej, czyli zastąpić tarcie suche ciał stałych tarciem płynnym, czyli tarciem wewnętrznym cieczy smarnej. Jeżeli, ze względu na spore naciski jednostkowe, warstwa cieczy podlega wyciśnięciu z przestrzeni pomiędzy powierzchniami trącymi, pozostaje wtedy między nimi cienka warstewka cieczy, utrzymująca się tam tylko wskutek wzajemnego oddzia-ływania cieczy z ciałami stałymi, zwana warstewką graniczną. Istnieje zależność: im jest silniejsze to wzajemne oddziaływanie, tym jest trwalsza ta graniczna war-stewka. Zabezpiecza ona przed wystąpieniem tarcia suchego. Tarcie przy smaro-waniu warstewkami granicznymi nazywa się tarciem granicznym.
W praktyce eksploatacyjnej maszyn dopuszcza się wyłącznie tarcie płynne i graniczne. Tarcie suche, z wyjątkiem przypadków, kiedy jest ono pożądane (hamulce, przekładnie cierne itp.), jest z praktyki eksploatacyjnej eliminowane. Ze względu na to, iż współpracujące powierzchnie nie są idealnie gładkie na wierz-chołkach tych nierówności, może występować tarcie suche lub graniczne, nato-miast we wgłębieniach tarcie płynne.
Trudność zbadania zjawisk zewnętrznego tarcia jest spowodowana tym, że jakkolwiek tarcie zewnętrzne, stosownie do swoich przejawów działania, jest zja-wiskiem czysto mechanicznym, wskutek czego bardzo łatwe do wykrycia i ilo-ściowego zmierzenia, to jednak u jego podstaw leżą oddziaływania cząstecz-kowe szczególnego rodzaju, zachodzące w cienkiej warstwie wierzchniej ciała stałego i biorące udział w procesie tarcia w sposób skomplikowany, zależny m.in. od składu i struktury materiałów trących. Tarcie ma bardzo mały zasięg w głąb materiału i dlatego istotny wpływ na wartość współczynnika tarcia ma stan powierzchni, jej zanieczyszczenie, stopień nawilgocenia a także skład atmosfery, w której jest użytkowana maszyna. Tarciu zewnętrznemu towarzyszy zarazem tar-cie wewnętrzne w mikroobszarach. Powstawanie oraz zanik więzi ciernych lokali-zowane są w warstwie wierzchniej. Model tarcia zewnętrznego przedstawiono na rysunku 4.4. Ciało stałe o sile oddziaływania G spoczywa na równi pochyłej. Jego przemieszczaniu przeciwstawia się siła tarcia T, która jest styczna do płaszczyzny ruchu, przeciwnie skierowana do kierunku ruchu i kierunku działania siły prze-mieszczającej ciało.
Rys. 4.4. Schemat działania sił na ciało stałe, spoczywające na równi pochyłej [1].

130
Przyczyną występowania siły tarcia są zjawiska towarzyszące stykowi dwóch ciał stałych. Gdy ciało leży w spoczynku na równi pochyłej o kącie nachylenia α, to wówczas można zbudować trójkąt sił G, N, H i uzyskać następujące związki (rys. 4.4):
H=T = G sin a; N = G cos a,
więc współczynnik tarcia
(4.1)
Doświadczalnie udowodniono, że równowaga sił działających na ciało znaj-dujące się na równi pochyłej i towarzyszący temu ciału spoczynek będą istnieć tak długo, póki kąt nachylenia równi pochyłej będzie mniejszy od wartości kąta granicznego α0. Przy równych wartościach obu kątów α=α0 ciało będzie się znaj-dowało w chwiejnej równowadze. Wtedy tangensy obu kątów: nachylenia równi pochyłej i granicznego kąta tarcia mają równe wartości, odpowiadające granicznej wartości współczynnika tarcia spoczynkowego. Siła tarcia spoczynkowego:
(4.2)
Z rysunku 4.4 wynika, że
(4.3)
oraz
(4.4)
Wypadkowa G zatacza względem kierunku działania siły N stożek o kącie wierzchołkowym a, tworząc stożek tarcia (rys. 4.5).
Rys. 4.5. Stożek tarcia [6].
Wewnątrz stożka tarcia są zawarte wszystkie kierunki działającej siły tarcia, przy których nie następuje naruszenie stanu spoczynkowego ciała o danej war-

131
tości współczynnika tarcia. Połowa wierzchołkowego kąta rozwarcia stożka jest kątem tarcia. Ciało na równi pochyłej zacznie się przemieszczać wtedy, gdy war-tość siły t jest równa wartości siły tarcia statycznego, czyli m = tg α i wtedy kąt α jest nazywany kątem tarcia spoczynkowego (statycznego).
Wartość współczynnika tarcia spoczynkowego jest większa od wartości współ-czynnika tarcia ruchowego. Rozróżnia się dwa rodzaje tarcia kinetycznego ciał stałych, a mianowicie: tarcie suche oraz technicznie suche. Ten podział dotyczy wyłącznie bardzo dokładnych badań laboratoryjnych. Praktycznie istnieje prawie zawsze tarcie techniczne suche. Tarcie suche występuje wtedy, gdy dwie współpra-cujące powierzchnie ciał stałych stykają się bezpośrednio, nierozdzielone żadnym ciałem trzecim.
Tarciem tocznym nazywa się taki rodzaj tarcia, przy którym prędkości obu ciał w punktach wzajemnego styku są równe i czas trwania styku tych punktów ciał idealnie sztywnych dąży do zera. Ruch jednego ciała względem drugiego w czasie dążącym do zera sprowadza się do obrotu ciała wokół osi, przechodzącej przez punkty styku i leżącej w płaszczyźnie stycznej obu ciał. Tarcie toczne ist-nieje w punktach styku, w których odkształcenie sprężyste materiału powoduje styk strefowy na pewnym obszarze (rys. 4.6).
Rys. 4.6. Model tarcia tocznego [6].
Oddziaływują tu: siła napędzająca F oraz siła nacisku N. Pojawia się tu także nowa siła – siła tarcia tocznego T, wyrażana wzorem:
(4.5)
gdzie: R – promień koła będącego przekrojem poprzecznym toczącej się bryły (np. walca lub kuli),
fT – współczynnik tarcia tocznego [m].
Wartość współczynnika tarcia tocznego zależy od własności sprężysto-pla-stycznych metali oraz od wartości obciążenia. Im większa twardość stykających się ciał, tym jest mniejsza wartość współczynnika tarcia tocznego. Wartość obli-czeniowego współczynnika tarcia tocznego w skojarzeniach technicznych wynosi około 0,05-0,0005.
RNfT T=

132
4.3. Charakterystyka warstwy wierzchniej
Warstwa wierzchnia jest wszędzie. Natura wyposażyła w nią wszystkie żywe organizmy. Skóra człowieka, łuski ryby, kora drzew to tylko niektóre tego przy-kłady. W zasadzie nie ma elementu bez warstwy wierzchniej, bo sam fakt istnie-nia geometrycznej powierzchni, granicy, końca elementu utworzonego z jedno-rodnego materiału wymusza istnienie warstwy wierzchniej. W przypadku inży-nierskich materiałów konstrukcyjnych własności użytkowe warstwy wierzchniej uzyskiwane są przez odpowiedni dobór materiałów i procesów technologicznych. Dobór ten wynika z fenomenologicznych związków między parametrami procesu technologicznego a uzyskanym stanem warstwy wierzchniej. W wielu zagadnie-niach technologii i eksploatacji maszyn występuje problem tworzenia i badania warstwy wierzchniej. Około 85% awarii maszyn jest spowodowanych uszkodze-niami warstwy wierzchniej poszczególnych elementów. Procesy tarcia ciał sta-łych występują w warstwie wierzchniej i dlatego w jej obrębie stwierdza się zapo-czątkowanie procesów dekohezji. Stan warstwy wierzchniej warunkuje energię swobodną powierzchni ciała stałego, która ma istotny wpływ na jakość smaro-wania, zwłaszcza przy tarciu granicznym. Konieczne jest zatem staranne nadawa-nie powierzchni elementów maszyn, ściślej ich warstwie wierzchniej, własności przeciwdziałających niszczącemu działaniu warunków użytkowania maszyny na materiał, z którego są one wykonane.
Wytrzymałość eksploatacyjna elementów maszyn, ujmująca sumarycznie wytrzymałość objętościową i powierzchniową, jest zatem ściśle związana z wła-snościami warstwy wierzchniej. Dlatego też stosuje się zróżnicowane sposoby technologicznego i eksploatacyjnego tworzenia warstwy wierzchniej, oparte na nowych sposobach obróbki wiórowej, powierzchniowej, plastycznej, elektroche-micznej itp. oraz nowych sposobach eksploatacyjnego docierania maszyn.
Warstwa wierzchnia to część materiału, z jednej strony ograniczona rzeczy-wistą powierzchnią ciała stałego, a z drugiej materiałem rdzenia, składająca się z kilku stref przechodzących płynnie jedna w drugą, o zróżnicowanych rozmia-rach, odmiennych cechach fizycznych i niekiedy chemicznych, w stosunku do cech materiału rdzenia (rys. 4.7 i 4.8).

133
Rys. 4.7. Charakterystyka warstwy wierzchniej [6].
Rys. 4.8. Model warstwy wierzchniej ciała stałego [6].
Stan warstwy wierzchniej może być scharakteryzowany zespołem parame-trów, których wartości są zależne od własności materiału i warunków tworzenia tej warstwy. Prawidłowo wytworzona warstwa wierzchnia elementów maszyn w wyniku procesów technologicznych oraz procesów eksploatacyjnych, zapewnia maksymalną wytrzymałość powierzchniową, a przez to dużą trwałość eksploata-cyjną rozważanego skojarzenia (rys. 4.9).

134
Rys. 4.9. Podstawowe charakterystyki warstwy wierzchniej: a) chropowatość powierzchni, b) wygląd powierzchni, c) zgład warstwy wierzchniej, d) falistość powierzchni, e) odkształ-cenia warstwy wierzchniej, f) rozkład naprężeń własnych w warstwie wierzchniej, g) roz-kład twardości metali warstwy wierzchniej [6].

135
Grubość warstwy wierzchniej jest to wymiar w kierunku prostopadłym do powierzchni geometrycznej przedmiotu mierzony jej granicami: zewnętrzną, stanowiącą powierzchnię odgraniczającą warstwę wierzchnią od otaczającego ośrodka i ustalającą kształt zewnętrzny elementu maszyny, oraz wewnętrzną, sta-nowiącą powierzchnię odgraniczającą warstwę wierzchnią od rdzenia materiału. Grubość warstwy wierzchniej jest trudna do wyznaczenia dostępnymi metodami, ponieważ granica wewnętrzna, jako płaszczyzna dwuwymiarowa, praktycznie nie istnieje. Dlatego za granicę wewnętrzną przyjmuje się głębokość zalegania zmian jednego lub kilku parametrów stanu warstwy wierzchniej.
Grubość warstwy wierzchniej powstałej podczas obróbki mechanicznej metali plastycznych oraz podczas obróbki cieplno-powierzchniowej lub cieplno-che-micznej wynosi nawet kilka milimetrów. W warstwie wierzchniej trących elemen-tów podczas eksploatacji maszyn zachodzą przemiany przedstawione na rys. 4.11. Intensywność zmian własności fizycznych lub chemicznych w poszczególnych obszarach warstwy wierzchniej, wytwarzanej w wyniku procesów technologicz-nych lub eksploatacyjnych, jest nierównomierna.
Rzeczywiste oddziaływanie powierzchni tarcia (rys. 4.12) dwóch ciał przesu-wających się względem siebie jest zależne od powierzchni styku i własności fizycz-nych metali trących elementów maszyn. Powierzchnie wszystkich ciał stałych, a zwłaszcza elementów maszyn, mają określony stan nierówności.
Rozróżnia się: – nominalną powierzchnię styku Sn jako zbiór wszystkich możliwych
powierzchni styku, zależną od wymiarów stykających się ciał,– konturową powierzchnię styku Sk jako powierzchnię stanowiącą obrys rze-
czywistych pól styku; wartość jej zależy od błędów kształtu, położenia i falistości powierzchni oraz od obciążenia,
– rzeczywistą powierzchnię styku Sr, stanowiącą pole sumy elementarnych powierzchni styku; rzeczywista powierzchnia styku występuje w miejscu fizycznego styku na wierzchołku nierówności, przy czym jest funkcją geo-metrycznego zarysu nierówności i obciążenia przypadającego na nią.
W każdych warunkach styku dwóch ciał między wymienionymi powierzch-niami zachodzi relacja Sn < Sk < Sr.
Geometria powierzchni części maszyn jest kształtowana w procesie obróbki. Na obrabianej powierzchni występują nierówności (błędy geometryczne) o wymiarach od kilku nanometrów do dziesiątek milimetrów – w kierunku stycz-nym do powierzchni i od kilku nanometrów do kilku milimetrów – w kierunku normalnym do powierzchni.
Ze względu na cechy geometryczne i wymiary wyróżnia się następujące błędy powierzchni:
– makroskopowe (kształtu, położenia, falistości), – mikroskopowe (chropowatość),

136
– submikroskopowe (submikronierówności). Geometrię powierzchni po obróbce mechanicznej charakteryzują błędy
kształtu, położenia, falistości oraz chropowatość.Falistość powierzchni jest to zbiór okresowo powtarzających się nierówności,
charakteryzujący się tym, że stosunek odstępu między wierzchołkami nierówno-ści do ich wysokości jest równy co najmniej 40 (rys. 4.13). W przeciwnym przy-padku nierówności są zaliczane do chropowatości powierzchni. Falistość, a nie błędy kształtu, występuje wówczas, jeśli mamy do czynienia co najmniej z dwoma wierzchołkami.
Rys. 4.11. Schemat podstawowych przemian w warstwie wierzchniej [5].

137
Rys. 4.12. Charakterystyka powierzchni styku podczas przenoszenia obciążeń [6].
Rys. 4.13. Charakterystyka falistości powierzchni: SF – skok falistości, RF – wysokość falistości, R – wysokość nierówności [6].
Parametrem określającym falistość powierzchni jest średnia wysokość fali (równa podwójnej amplitudzie), wyznaczona jako średnia arytmetyczna z pomiaru pięciu nierówności. Parametrem dodatkowym jest średnia długość fali. W wielu przypadkach na powierzchniach obrabianych występują równo-cześnie falistości o różnych długościach fali. Falistość o maksymalnej wysoko-ści oraz o mniejszej amplitudzie i długości fali może w niektórych przypadkach wpływać istotnie na współpracę trącej pary. Mikrofalistość, tj. falistość o dłu-gościach fali rzędu dziesiątych części milimetra i wysokości dziesiątych części mikrometra, może spowodować drgania trącej pary. Falistość i błędy kształtu warunkują wartość konturowej powierzchni styku przedstawionej na rysunku 4.13.
Chropowatość powierzchni jest to zbiór drobnych nierówności powierzchni rzeczywistej, określonych umownie jako odchyłki profilu (zarysu) tej powierzchni, zmierzonego od przyjętej linii odniesienia na długości odcinka elementarnego tej linii, na którym nie uwzględnia się odchyłek kształtu i falistości powierzchni. Nierówności te są charakteryzowane znacznie większą wartością niż falistość sto-sunku wysokości nierówności do odległości pomiędzy ich wierzchołkami. Wyso-kość nierówności (w zależności od obróbki) zawiera się w granicach 0,01-200 µm.
Parametrami określającymi chropowatość są (rys. 4.14): – średnie arytmetyczne odchylenia profilu od linii średniej Ra w µm,

138
– wysokość chropowatości według dziesięciu punktów profilu Rz w µm, – maksymalna wysokość nierówności Rmax w µm.
Średnie arytmetyczne odchylenia profilu od linii średniej Ra przyjęto za para-metr główny, natomiast Rz i Rmax za parametry pomocnicze.
Średnia arytmetyczna odchylenia profilu od linii średniej Ra jest to średnia war-tość odległości punktów y1, y2,... yn profilu zaobserwowanego od linii średniej na długości odcinka elementarnego le:
(4.6)
Wysokość chropowatości Rz jest to średnia odległość pięciu najwyżej położo-nych wierzchołków od pięciu najniżej położonych punktów wgłębień zaobserwo-wanego profilu na długości odcinka elementarnego le, zmierzona od linii odnie-sienia równoległej do linii średniej (rys. 4.14):
(4.7)
Największa wysokość chropowatości Rmax jest to suma odległości najwyższego wierzchołka nierówności od linii średniej i dna największego wgłębienia od tej linii na długości odcinka elementarnego (rys. 4.14).
Rys. 4.14. Charakterystyka chropowatości powierzchni (opis w tekście) [6].
Chropowatość powierzchni elementów maszyn jest zależna od rodzaju obróbki powierzchniowej oraz od własności materiału obrabianego. Stan powierzchni ma istotny wpływ na jej nośność. Powierzchnią nośną nazywa się sumę wszystkich pól styku powierzchni rzeczywistej z powierzchnią nominalną (idealnie gładką, płaską i sztywną) dociskanej do niej siłą normalną (rys. 4.15). Przy wyznaczeniu

139
powierzchni nośnej nacisk normalny, występujący między powierzchnią rzeczy-wistą a powierzchnią nominalną, nie może powodować plastycznych odkształ-ceń wierzchołków nierówności. Wielkość stykającej się powierzchni nominalnej z powierzchnią badaną może być przedstawiona jako pole płaszczyzny przecinają-cej nierówności badanej powierzchni na określonej ich głębokości.
Długość nośna zarysu powierzchni jest sumą odcinków zarysu, wzdłuż których styka się ona z powierzchnią wzorcową. Liniowym udziałem nośnym hL nazwano stosunek długości nośnej Li wzdłuż odcinka pomiarowego do całkowitej długości tego odcinka L
(4.9)
a powierzchniowy udział nośny
(4.10)
gdzie: L – odcinek pomiarowy w m, Sr – rzeczywista powierzchnia styku w m2, Sn– nominalna powierzchnia styku w m2.
Przykładowe wyniki pomiarów analizy chropowatości 2D i 3D powierzchni zmierzonej profilometrem TOPO 01vP przedstawiono na rysunku 4.16, zaś topo-grafię powierzchni wykonaną mikroskopem sił atomowych (AFM) na rysunku 4.17.
Rys. 4.15. Charakterystyka krzywych nośności: a) liniowej, b) powierzchniowej, a – wartość zbliżenia; l1, l2,... li – szerokość nierówności dla danej wartości zbliżenia, Rmax – największa wysokość chropowatości [6].
∑=
=+++=n
xxnl L
Llllh1
211...
n
rL S
S∑=η

140
Rys. 4.16. Przykłady analizy 2D i 3D powierzchni zmierzonej profilometrem [6].
Rys. 4.17. Topografia powierzchni stali HARDOX w wyniku zużywania ściernego.
Twardość jest jedną z tych właściwości, których nie można jednoznacznie zde-finiować w oparciu o znane wielkości fizyczne. W praktyce przez twardość rozu-mie się odporność na odkształcanie plastyczne przy oddziaływaniu skupionego nacisku w postaci ściśle określonego wgłębnika. Ze względu na znikome odkształ-cenie oraz możliwość wykonywania pomiarów na gotowych elementach, pomiary twardości są zaliczane do badań nieniszczących.

141
Metody pomiaru twardości, ze względu na charakter oporu stawianego przez materiał podczas próby, można podzielić na:
– statyczne – oparte na statycznym wciskaniu wgłębnika (metody Roc-kwella, Brinella, Vickersa, Knoopa),
– dynamiczne – oparte na udarowym działaniu wgłębnika (metoda Poldi, Shore’a – elastomery),
– ryskowe – twardość jest określana w oparciu o wymiary rysy otrzymywa-nej w wyniku przesuwania się po powierzchni materiału ostrego i twar-dego wgłębnika z ściśle określonym dociskiem. Przedstawicielem tej metody jest skala Mohsa, który wybranym minerałom przyporządkował kolejne liczby od 1 do 10. Tworzą one skalę pomiaru twardości minerałów od talku do diamentu.
Najczęściej rozpowszechnionymi metodami pomiaru twardości są metody statyczne. W metodzie ROCKWELLA miarą twardości jest różnica umownej oraz rzeczywistej głębokości wnikania w materiał określonego wgłębnika (rys. 4.18). Do badań używa się pięciu różnych wgłębników – stożka diamentowego, w którym kąt rozwarcia wynosi 120o, a promień zaokrąglenia wierzchołka wynosi 0,2 mm oraz stalowych hartowanych kulek o średnicach: 1/16”, (1/8”, 1/4”, 1/2”). Stosowane są następujące oznaczenia w zależności od siły nacisku wstępnego i obciążenia całkowitego oraz elementu wciskanego.: HRC (1471 N), HRA (588 N) – stożek diamentowy HRB (980 N), HRF (588 N) – kulka stalowa.
Rys. 4.18. Przyrząd do pomiaru twardości metodą ROCKWELLA.

142
W metodzie BRINELLA twardość jest to stosunek siły F, działającej prostopa-dle do badanej próbki i obciążającej stalową lub z węglików spiekanych kulkę, do pola powierzchni odcisku S, jaki ta kulka zostawiła w badanym materiale.
Pole powierzchni odcisku określa się, mierząc średnicę czaszy kulistej trwa-łego odcisku. Celem zapewnienia dokładności pomiarów oraz potwierdzenia, że odcisk stanowi sferę kuli, średnicę powstałego odcisku określa się jako średnią z dwu prostopadłych kierunków.
Oznaczenie twardości Brinella składa się z cyfrowo-literowego ciągu znaków zawierającego:
– wartość twardości (trzy cyfry znaczące), – symbol HB lub HBW – dla kulek z węglików spiekanych, – indeks wskazujący przyjęte warunki próby, obejmujący średnicę kulki
w mm, – wartość siły obciążającej w N, – czas działania siły obciążającej w sekundach (jeśli jest inny niż 10-15 s). Przykładowe oznaczenie twardości: 350 HBW 10/100/30.
Metoda Brinella znalazła szerokie zastosowanie w praktyce przemysłowej ze względu na dobrą powtarzalność wyników. Stosuje się ją głównie do pomiaru twardości stali w stanie normalizowanym, zmiękczonym, lub ulepszonym ciepl-nie.
Metoda VICKERSA polega na wciskaniu pod obciążeniem P w badaną powierzchnię czworokątnego ostrosłupa diamentowego, którego kąt dwuścienny między przeciwległymi ścianami wynosi 136 stopni. Czas trwania nacisku wynosi 15 sek. Liczba twardości Vickersa określana jest przez stosunek siły nacisku do powierzchni odcisku ostrosłupa.
Nacisk wywierany, zależnie od rodzaju powierzchni badanej, może być dobie-rany w zakresie od 9,8 do 981 N (od 1 do 100 kG). Po dokonaniu pomiaru mierzy się długości przekątnych powstającego odcisku, przyjmując do dalszych obliczeń wartość średnią (rys. 4.19).

143
Rys. 4.19. Charakterystyka pomiaru twardości metodą Vickersa: a) obciążenie próbki, b) kształt odcisku, 1) wgłębnik, 2)siła obciążająca, 3) próbka, 4) odcisk.
Metoda KNOOPA polega na statycznym wgniataniu wgłębnika w kształcie ostrosłupa o podstawie rombu i kątach między przeciwległymi ścianami rów-nymi 172°30’i130°.Twardość jest proporcjonalna do stosunku obciążenia do powierzchni rzutu trwałego odcisku.
Metoda Vickersa jest także stosowana najczęściej do pomiaru mikrotwardo-ści. Sama zasada pomiaru mikrotwardości HV właściwie nie różni się od zasady pomiaru makrotwardości HV. Istotna różnica polega nie tylko na zastosowaniu mniejszych obciążeń, ale przede wszystkim na dokładności wykonania wgłębnika, gładkości badanej powierzchni i innych elementów mających wpływ na wynik pomiaru. W przypadku pomiaru mikrotwardości stosowane są obciążenia poniżej 10 N. Urządzenia pomiarowe umożliwiające realizację tych pomiarów nazywane są mikrotwardościomierzami. Przykładowy wygląd powierzchni tarcia przedsta-wiono na rysunku 4.20, zaś strukturę warstwy wierzchniej na rysunku 4.21. Do wyznaczania takich charakterystyk wykorzystywane są mikroskopy skaningowe, optyczne i atomowe oraz analizatory rentgenowskie i analizatory obrazu.

144
Rys. 4.20. Widok powierzchni warstwy wierzchniej elementu obrabiającego glebową masę ścierną.
Rys. 4.21. Zróżnicowana budowa warstwy wierzchniej na grubości i długości. Strefa wtopu: ferryt stopowy z licznymi węglikami (Fe, Cr)3 C. Napoina: węgliki pierwotne eutektyka [a+ (Fe, Cr)7 C3] głównie o budowie płytkowej + austenit szczątkowy.
4.4. Procesy zużycia
W miarę upływu eksploatacji obiektu mechanicznego następuje wyczerpywa-nie potencjału eksploatacyjnego w wyniku:
– zużycia technicznego (mechanicznego),– zużycia funkcjonalnego (moralnego),– zużycia zewnętrznego (ekonomicznego).

145
Zużycie techniczne (mechaniczne)Przez zużycie techniczne rozumie się trwałe, niepożądane zmiany fizyko-che-
miczne zachodzące w czasie eksploatacji, w wyniku czego okres zdolności do speł-nienia przez maszynę określonych funkcji użytkowych stopniowo się wyczerpuje.
Zużycie funkcjonalne (moralne)Przez zużycie funkcjonalne rozumie się trwałe, niepożądane zmiany rozwią-
zań funkcjonalno-użytkowych maszyn, odniesione do aktualnie obowiązujących standardów, wynikających z postępu technicznego i technologicznego.
Zużycie zewnętrzne (ekonomiczne)Zużycie zewnętrzne traktowane jest jako utrata wartości maszyn w wyniku
oddziaływania na nią czynników zewnętrznych, pochodzących z otoczenia układu eksploatacji. Otoczenie to tworzą uwarunkowania ekonomiczne, prawne, społeczne i ekologiczne.
Czynniki powodujące zużycie zewnętrzne podzielić można na dwie grupy:– zużycie spowodowane czynnikami wynikającymi z lokalizacji i dostęp-
ności (dostępność surowca i produktów, zmiana przepisów odnośnie ochrony środowiska itd.),
– zużycie wywołane czynnikami ekonomicznymi mikro- i makroekono-micznymi (zmiana ulg, moda, itd.).
Dla prawidłowej oceny działania maszyny szczególne znaczenie ma podział cech opisujących daną maszynę według stopnia ich ważności, tj.:
cechy krytyczne – to takie cechy, dla których przekroczenie wartości poza dopuszczalny przedział ich tolerancji powoduje istotne zmniejszenie efektyw-ności funkcjonowania maszyny i może spowodować jej zniszczenie oraz stwarza zagrożenie człowiekowi i jego otoczeniu.
cechy ważne – to takie cechy, których zmiana wartości poza ustalone granice powoduje obniżenie efektywności funkcjonowania maszyny oraz stwarza zagro-żenie jej zniszczenia.
cechy mało ważne – to takie cechy, których zmiany wartości poza ustalone granice powodują dopuszczalne zmniejszenie efektywności działania maszyny.
cechy pomijalne – to cechy nieistotne ze względu na wpływ zmian ich wartości na ocenę procesu eksploatacji maszyny.
Ponadto rozróżniane jest:zużycie odwracalne – dotyczy tych elementów lub maszyn, dla których istnieje
możliwość, poprzez naprawę lub modernizację, przywrócenia nominalnych para-metrów użytkowych lub dostosowanie rozwiązań funkcjonalnych do aktualnego poziomu technicznego.
zużycie nieodwracalne – dotyczy tych elementów lub maszyn, w których dotychczasowy proces zmiany właściwości funkcjonalno-użytkowych czyni nie-opłacalnym lub niemożliwym przedsięwzięcia naprawczo-modernizacyjne.

146
Proces zużycia technicznego jest spowodowany przez oddziaływanie wymu-szeń zewnętrznych – mechanicznych, cieplnych, chemicznych, elektrochemicz-nych, mikrobiologicznych, elektrycznych lub promieniowania. W rzeczywistości zużycie jest najczęściej wynikiem współdziałania różnych czynników, z dominacją czynnika, którego ujawnienie pozwala zastosować właściwe sposoby przeciwdzia-łania niszczeniu.
Przeanalizowanie zagadnienia zużywania technicznego pozwala na wycią-gnięcie właściwych wniosków co do przyczyn występowania uszkodzeń. Duża częstotliwość pojawiania się pewnego typu zużycia sugeruje np. o błędach poczy-nionych w fazie projektowania lub wytwarzania. Znajomość charakteru procesów zużycia stanowi też podstawę właściwego doboru materiałów par kinematycznych maszyn.
Zużywaniem określa się proces zmian w warstwie wierzchniej ciała stałego, czego skutkiem jest zużycie mierzone objętościowo, liniowo, lub wagowo. Ogólnie procesy zużywania można sklasyfikować:
– ze względu na przyczyny: tribologiczne i nietribologiczne,– ze względu na przebieg: ustabilizowane i nieustabilizowane,– ze względu na skutki: normalne i awaryjne (patalogiczne).Następstwem zachodzących procesów są zmiany właściwości kształtu elemen-
tów maszyn, związanych głównie z istnieniem tarcia, nacisków oraz zachodze-niem reakcji chemicznych zarówno w materiale danych elementów, jak i między materiałem a otoczeniem.
Skutkiem procesu zużycia jest najczęściej ubytek materiału, mierzony w zmia-nach masy (zużycie wagowe) lub jednostkach długości (zużycie geometryczne) oraz zmiany wewnętrzne w warstwie wierzchniej (odkształcenie, zmiany che-miczne).
Procesy zużycia przebiegają od powierzchni ciała stałego w głąb, prowadząc do zmian własności i uszkodzeń, a zasięg oddziaływania wymuszeń zewnętrz-nych, stanowiących przyczyny zużycia eksploatacyjnego wyznacza tzw. eksplo-atacyjną warstwę wierzchnią. Pod tym pojęciem rozumie się strefę materiału zawartą między powierzchnią zewnętrzną a umowną powierzchnią wewnątrz ciała stałego, ograniczającą zasięg oddziaływania wymuszeń zewnętrznych. Poję-cie to jest analogiczne do pojęcia warstwy wierzchniej zawartej w polskiej normie.
4.5. Charakterystyka procesów zużywania
Model węzła ruchowego maszyny jako system w stanie dynamicznym przed-stawiono na rysunku 4.22. W warstwie wierzchniej (WW) elementów maszyn w wyniku ich współpracy zachodzą procesy fizyczno-chemiczne [5]:

147
– w objętości WW: dyfuzja, przemiany strukturalne i fazowe;– na powierzchni WW: adhezja, adsorpcja, chemisorpcja, utlenienie.
Rys. 4.22. Charakterystyka procesów zużyciowych w warstwie wierzchniej [2].
Pomiędzy elementami systemu tribologicznego zachodzą następujące oddzia-ływania: r1 – adhezja – jest to zjawisko łączenia się powierzchniowych warstw dwóch róż-
nych ciał (faz) doprowadzonych do zetknięcia wskutek przyciągania między-cząsteczkowego; pod tym pojęciem rozumie się także ogół zjawisk łączenia się atomów stykających się ciał zarówno siłami fizycznymi, jak i chemicznymi,
r2 – adsorpcja fizyczna – jest procesem polegającym na powierzchniowym wią-zaniu cząstek płynu (adsorbentu) przez cząstki ciała stałego; adsorpcja fizyczna polega na zagęszczaniu się substancji na powierzchni adsorbentu pod wpły-wem działania się przyciągania międzycząsteczkowego (sił Vander Waalsa),
r3 – chemisorpcja – adsorpcja zachodząca wskutek tworzenia się wiązań che-micznych; jest zwykle procesem nieodwracalnym;
r4 – utlenianie – jest ogółem procesów chemicznych przebiegających z oddawa-niem elektronów przez atom lub jon i powodujących wzrost wartościowości dodatniej lub zmniejszenia wartościowości ujemnej pierwiastka; w szczegól-nym przypadku utlenianie jest łączeniem się danej substancji z tlenem,
r5 – korozja – stopniowe niszczenie tworzyw wskutek chemicznego lub elektro-chemicznego oddziaływania środowiska,
r6 – dyfuzja – przenikanie cząsteczek jednej substancji w obręb drugiej przy bez-pośrednim zetknięciu tych substancji,
r7 – odkształcenia sprężyste – odkształcenia zanikające po usunięciu statycznego układu sił zewnętrznych, który je wywołał,
r8 – odkształcenia plastyczne – odkształcenia, które nie zanikają po usunięciu statycznego układu sił zewnętrznych, który je wywołał,
r9 – mikroskrawanie – wykrawanie w materiale określonej mikroobjętości na skutek skrawającego działania, znajdujących się między powierzchniami tar-cia lub opływających powierzchnię tarcia cząstek ścierniwa znacznie tward-

148
szego od tworzywa elementu lub też na skutek skrawającego działania nierów-ności twardszej powierzchni,
r10 – bruzdowanie – wgłębianie elementu jednego z ciał współpracujących w materiał drugiego i plastyczne wyciśnięcie w nim bruzdy w czasie ruchu względnego,
r11 – rysowanie – tworzenie rys w ścieranym materiale przez przesuwający się element ciała współpracującego (na skutek wykrawania i odsuwania mate-riału na boki),
r12 – odrywanie – podważanie i oddzielanie przez występy jednej powierzchni występów drugiej powierzchni,
r13 – zrywanie połączeń tarciowych – rozrywanie połączeń tarciowych, wytwo-rzonych w procesie adhezji, zgrzania lub zespolenia wierzchołków nierówno-ści dwóch powierzchni,
r14 – przemiany strukturalne lub fazowe to rozwój defektów struktury krystalicz-nej i zmiany budowy metali (przekształcenie sieci, powstawanie i rozpuszcza-nie węglików, dyfuzja, przemiany fazowe itp.).Powierzchnie robocze współdziałają mechanicznie, dlatego źródłem proce-
sów zużycia zachodzących na tych powierzchniach są czynniki mechaniczne: siły przenoszone przez ciała współdziałające i ruch tych ciał względem powierzchni roboczej. Proces zużycia może mieć charakter złożony, tj. może się składać z kilku elementarnych procesów zużyciowych pomimo oddziaływania wyłącznie czynni-ków mechanicznych. Wówczas zwykle jeden proces zużycia dominuje, stanowiąc główną przyczynę stanu zużycia części. Warunki tarcia części maszyn mogą więc powodować występowanie różnych kombinacji takich mechanicznych procesów zużycia, a także przechodzenie jednego rodzaju procesu zużycia w drugi (niesta-bilne procesy zużycia).
Do podstawowych rodzajów zużywania nietribologicznego zaliczamy:1) KOROZJĘ – niszczenie elementów pod wpływem czynników chemicznych
i elektrochemicznych; dotyczy elementów wykonanych z metali i ich stopów nieszlachetnych; zachodzi między innymi w cylindrach silników spalinowych, w ich zaworach wydechowych, komorach spalania turbin gazowych, prze-grzewaczach pary, w elementach pieców itp.Rozróżniamy następujące rodzaje korozji:• chemiczną–oddziaływaniesuchychgazówlubcieczy,• w nieelektrolitach – zachodzi pod działaniem agresywnych substancji
organicznych nie będących elektrolitem (nie przewodzi prądu),• elektrochemiczną – przebiega z udziałem elektrolitów, działających
z powierzchnią metali i dzieli się na:– korozję w elektrolitach; ten rodzaj korozji zachodzi pod działa-
niem wód naturalnych oraz roztworów wodnych na powierzchnię

149
metalu; może zależeć od charakteru środowiska (w kwasach, zasadach i solach),
– korozję ziemną, spowodowaną agresywnym działaniem gleby,– korozję atmosferyczną; jest to korozja pod wpływem otaczającego śro-
dowiska (powietrza) lub gdy metal znajduje się w dowolnym wilgot-nym gazie,
– elektrokorozję, która zachodzi pod wpływem prądu z zewnętrznego źródła (metalowych części toru oraz instalacji podziemnych, uszko-dzenia powłok kabli, rurociągów, fundamentów w miejscach trudnych do przewidzenia i zlokalizowania pod wpływem prądów błądzących),
– korozję stykową (kontaktową), spowodowaną zetknięciem się dwóch metali o różnych potencjałach elektrochemicznych,
– korozję przy współudziale czynników mechanicznych – może być intensyfikowana naprężeniami, zmęczeniem materiału,
– korozję w warunkach jednoczesnego działania: kawitacji, strumienia cieczy i gazu oraz tarcia.
Niszczenie korozyjne towarzyszy eksploatacji większości obiektów, a straty nimi spowodowane niekiedy wielokrotnie przewyższają skutki zużycia mecha-nicznego. Objawem niszczenia korozyjnego może być rdzewienie, pękanie lub spadek wytrzymałości mechanicznej albo ciągliwości metali.2) EROZJĘ – zużycie polega na powstawaniu miejscowych ubytków materiału
w wyniku mechanicznego oraz korozyjnego oddziaływania strumienia czą-stek ciał stałych lub cieczy o dużej energii kinetycznej. W układach podlega-jących erozji element zużywany pozostaje nieustannie ten sam, zaś przeciw-ciało systematycznie niszczące nawet najtwardsze i najbardziej wytrzymałe materiały napływa doń nieustannie. Pojedyncza molekuła płynu lub prze-noszona przezeń twarda cząstka naciera dynamicznie na wybrany fragment powierzchni tylko jeden raz, jednakże ilość nacierających molekuł i cząstek jest nieskończenie wielka. W technice zużycie erozyjne występuje w wielu ele-mentach, jak: różnego rodzaju wirniki, rurociągi przesyłowe, pompy, maszyny przepływowe itd. Ze względu na rodzaj cząstek wywołujących erozję, zużycie to można podzielić na:• zużycieerozyjnewstrumieniucząstekciałstałych,• zużycieerozyjnewstrumieniucieczy(zużyciehydroerozyjne),• zużycieerozyjnewstrumieniucieczyzawierającychcząstkiciała stałego
(hydrościerne) zaliczane częściowo do tribologicznego. Podczas dyna-micznego oddziaływania cząstek na powierzchnię ciała stałego mogą zachodzić następujące procesy zużyciowe:– bruzdowanie i umacnianie zgniotowe materiałów plastycznych,– mikroskrawanie twardymi cząstkami,– pękanie i wykruszanie materiałów kruchych w mikroobszarach,

150
– tworzenie adhezyjnych połączeń cząstek z atakowaną powierzchnią i ich zrywanie (w przypadku przenoszenia przez strugę drobin metali i stopów),
– zużywanie o charakterze zmęczeniowym,– transport ciepła do powierzchni, generowanie na niej dodatkowych
impulsów cieplnych i gradientów temperatury,– oddziaływania chemiczne i elektrochemiczne (roztwarzanie oraz two-
rzenie i usuwanie produktów reakcji chemicznych). Powyższe elementarne procesy najczęściej przebiegają ze sobą synergicznie.
Z reguły w takich wypadkach sumaryczne zużycie jest znacznie większe niż suma niezależnego oddziaływania każdego z tych mechanizmów.3) ABLACJĘ – szczególny rodzaj erozji występujący w wyniku działania gorą-
cych gazów przepływających z dużą prędkością, np. pod wpływem gazów wylotowych z dyszy silników odrzutowych.
4) KAWITACJĘ – zużycie, zwane również erozją kawitacyjną, definiowane jest jako proces wyrywania cząstek materiału z powierzchni w wyniku lokalnych implozji (niezwykle gwałtownych spadków ciśnienia), wywołanych zmianą stanu skupienia materii lub reakcjami chemicznymi zachodzącymi w prze-pływającej strudze. Zjawiska takie mogą występować w miejscach gwałtow-nej zmiany parametrów stanu (ciśnienia i temperatury), wywoływanych np. znaczną zmianą przekroju przewodu, kontaktem strugi ze ścianami o odmien-nej od niej temperaturze, względnie w strefach dozowania lub mieszania pły-nów (substancji) wzajemnie reaktywnych chemicznie. Zużywanie przez kawi-tację występuje na niektórych powierzchniach części i podzespołów maszyn przepływowych (pomp, turbin, wysokowydajnych wentylatorów i śmigieł tło-czących, śrub napędowych) oraz w rurociągach przesyłowych.
Do zużywania tribologicznego zaliczane są następujące jego postacie:1) ZUŻYWANIE UTLENIAJĄCE (rys. 4.23) – chemiczno-mechaniczna forma
zużywania. Zużycie to polega na adsorpcji tlenu w obszarach tarcia i jego dyfuzji w odkształcone plastycznie i sprężyście warstwy metalu oraz na ich mechanicznym usuwaniu w wyniku ścierania i odkruszania. Proces charak-teryzuje się stopniowym usuwaniem (niszczeniem) i odtwarzaniem warste-wek tlenkowych na powierzchniach metali. Zachodzi najczęściej przy tarciu metali i ich stopów, o strukturach heterogenicznych, oraz stopów z podwyż-szoną twardością i granicą plastyczności. Produkty zużycia mają postać cien-kich łusek o ostrych brzegach (kruche pękanie tlenków). Zużywanie utlenia-jące jest bardziej intensywne gdy szybkość niszczenia tlenków jest większa od ich powstania Normalny proces zużywania, przy zachowaniu jego stabilności charakteryzuje nieznacznym przyrostem wartości zużycia. Stabilność – szyb-kość tworzenia tlenków jest równa lub większa od szybkości ich niszczenia

151
pod wpływem sił tarcia. W przeciwnym razie, dodatkowo pojawi się adhe-zyjna składowa zużycia, co w warunkach niedoskonałego smarowania dopro-wadzić może do zacierania. Szybkość zużywania przez utlenianie zależy od rodzaju i składu chemicznego ciał stałych pozostających w styku ciernym oraz od fizykochemicznej charakterystyki szeroko rozumianego otoczenia.
Ten rodzaj zużycia zachodzi zarówno przytarciu ślizgowym jak i tocznym, gdzie zawsze towarzyszy zużyciu zmęczeniowemu. Występowanie: łożyska śli-zgowe, cylinder – tłok –pierścień tłokowy.
Rys. 4.23. Schemat zużywania utleniającego: 1 – pierwotne warstewki tlenków, 2 – odtwa-rzające się warstewki tlenków, 3 – warstwa wierzchnia, 4 – materiał rodzimy (rdzeń)[1].
2) ZUŻYWANIE WODOROWE (rys. 4.24) – chemiczno-mechaniczna forma zużywania. Istota procesu polega na stopniowym niszczeniu warstwy wierzch-niej wskutek adsorbcji wodoru na powierzchniach stali i żeliwa i jego dyfuzji w głąb materiału. Dyfuzja wodoru w głąb materiału powoduje kruche pęka-nie w mikroobjętościach warstwy wierzchniej i jej niszczenie pod wpływem sił normalnych i stycznych. Na proces zużycia wodorowego składają się trzy grupy zjawisk:• wydzielanie wodoru w obszarze styku ciernego i jego adsorpcja na
powierzchni elementów współpracujących,• dyfuzjawodoruwgłąbwarstwywierzchniej,wywołującalokalniewysokie
stężenia w sieci krystalicznej,• procesyzwiązanezutratąplastyczności idekohezją fragmentówwarstw
wierzchnich pod wpływem obciążeń w obszarze styku.
Fn
v
4
3
2
1
3
4
1
2

152
Zużycie wodorowe można podzielić na dwie grupy: zużycie wodorowe dys-persyjne (przez pękanie) oraz zużycie wodorowe przez wkruszanie.
Zużywanie dyspersyjne polega na rozluźnianiu struktury przypowierzch-niowych warstw stali i żeliw i oddzielaniu drobnych cząstek wskutek działania sił tarcia. Wykruszanie wodorowe występuje, gdy warstewka przypowierzch-niowa zostanie nasycona wodorem i jednocześnie następuje odkształcenie war-stwy wierzchniej wskutek działania sił tarcia. Wodór wypełnia pustki w zdefor-mowanej strukturze tej warstwy i przy obciążeniach, nie mając ujścia, powoduje naprężenia prowadzące do tworzenia szczelin, a następnie wykruszania materiału z warstwy przypowierzchniowej.
Zużywanie wodorowe zaobserwowano na powierzchniach wirników i tarcz rozrządu pomp naftowych, w układach hamulcowych (przenoszenie żeliwa na okładziny cierne z tworzyw sztucznych). Zużywanie wodorowe występuje także przy tarciu tocznym.
Rys. 4.24. Schemat zużywania wodorowego: a) zużywanie dyspersyjne, b) przez wykru-szanie; 1 – zdyspergowana warstewka przypowierzchniowa, 2 – przypowierzchniowa war-stewka niszczona przez wzrost szczelin i odrywanie fragmentów materiału, 3 – warstwa wierzchnia, 4 – materiał rodziny (rdzeń) [1].
Stwierdzono, ze woda zawarta w środku smarnym może w sprzyjających warunkach rozkładać się na tlen i wodór. Wodór dyfundując do warstwy wierzch-niej elementów tocznych wywołuje wymienione sposoby oddziaływania destruk-cyjnego.
Zaleca się następujące sposoby przeciwdziałania zużywaniu wodorowemu:– przy wyborze materiałów na węzły tarcia należy uwzględnić ich skłonność
do nawodorniania. Najbardziej na nawodornianie podatne są stale, w tym hartowane i słabo odpuszczone stale węglowe i niskostopowe oraz żeliwa ferrytyczne. Dogniatanie stali i jej przeróbka plastyczna na zimno zwięk-sza znacznie jej podatność na dyfuzję wodoru,
– wprowadzać do stali pierwiastki chromu, tytanu i wanadu, obecność któ-rych zmniejsza możliwość wnikania wodoru do tego materiału,

153
– należy unikać skojarzeń stali i żeliw z polimerami, które łatwo się rozkła-dają wydzielając wodór. Dotyczy to szczególnie układów hamulcowych z okładzinami tworzyw sztucznych. Ciepło tarcia w tych układach sprzyja rozkładowi termicznemu polimerów i wydzielaniu się wodoru,
– w parach tarcia stal – stopy miedzi należy unikać dodatków do tych sto-pów w postaci antymonu, związków arsenu, siarki i innych, sprzyjających się wydzielaniu się wodoru,
– przy współdziałaniu stali z polimerami elementy układu tribologicznego mogą się ładować elektrycznie – jeden ujemnie, drugi dodatnio. Jeśli ele-ment ładuje się ujemnie, to zachodzi jego intensywne nawodornianie. Dla uniknięcia tego wystarczy wprowadzić do tworzywa innego tworzywa ładującego się ujemne, np. PTFE. Wtedy element stalowy będzie się łado-wał dodatnio, a element z polimeru ujemnie, wodór nie będzie atakował elementu stalowego,
– w układach hamulcowych, w których stosuje się okładziny cierne z poli-merów, należy dodać do polimeru kilkuprocentowy dodatek tlenku mie-dzi, który, wiążąc wodór, redukuje się do czystej miedzi,
– dobór substancji smarujących, które nie podlegają degradacji termicznej oraz stosowanie inhibitorów wnikania wodoru jako dodatków do olejów i smarów.
3) ZUŻYWANIE ŚCIERNE (rys. 4.25) – najczęściej spotykane oraz najlepiej poznane, stanowiące nawet do 90% przypadków zużycia tribologicznego. Spowodowane jest pojawieniem się w strefie tarcia małych cząstek o zwy-kle większej od współpracujących materiałów twardości. Cząstki te stanowią ścierniwo i najczęściej mogą dostawać się podczas eksploatacji, np. piasek, kurz, mogą być twardymi produktami zużycia przenoszonymi do styku cier-nego przez płyny eksploatacyjne, jak np. oleje oraz powstawać w wyniku pro-cesów produkcyjnych, np. szlifowanie. Twarde cząstki mogą swobodnie prze-mieszczać się w styku ciernym jako „trzecie ciało” lub być unieruchomione (wgniecione, zatopione) w jednej lub obu współpracujących powierzchniach. Przebieg i intensywność zużycia zależne są od rodzaju, struktury i właściwo-ści materiałów (np.moduł sprężystości) współpracujących, a także od różnicy twardości tworzywa konstrukcyjnego (Hm) do twardości ścierniwa (Hs).

154
Rys. 4.25.Postacie zużywania ściernego: a) luźnym ścierniwem, b) ścierniwem w stru-mieniu powietrza lub cieczy, c) implozją pęcherzyków kawitacyjnych w cieczy z cząstkami stałymi, d) luźnym ścierniwem dwóch zamkniętych powierzchni, e) luźnym ścierniwem miękkiej i twardej powierzchni, f) występami mikronierówności [1].
Oprócz twardości, duży wpływ na intensywność zużywania ściernego mają kształt i wielkość twardych cząstek oraz geometria i dynamika ich oddziaływa-nia w styku tarciowym oraz właściwości otoczenia. W zależności od postaci nisz-czenia warstw wierzchnich wyróżnia się cztery podstawowe mechaniczne formy zużywania ściernego (rys. 4.26): bruzdowanie, mikrozmęczenie, mikroskrawanie oraz rysowanie. Ta forma zużycia zachodzi, gdy Hm / Hs < 0,6.

155
Rys. 4.26. Schemat wzajemnych oddziaływań mikronierówności pod wpływem sił stycz-nych: I – odkształcenia sprężyste, II – wzajemne plastyczne odkształcenia nierówności, III – bruzdowanie, IV – mikroskrawanie: a) nawiązanie styku, b) styk, c) zerwanie styku [1].
I
II
III
IV
a) b) c)
a) b) c)
a) b) c)
a) b) c)

156
Bruzdowanie – nie jest związane z wytworzeniem produktów zużycia, a jedy-nie z plastycznym odkształceniem materiału wokół działającego ziarna ścierniwa.
Mikrozmęczenie – zachodzi, kiedy bruzdowanie przebiega w wielu kierun-kach w sposób przypadkowy; wtedy ma miejsce umacnianie zgniotowe, a następ-nie kruche pękanie i oddzielanie produktów zużycia.
Mikroskrawanie – w swej idealnej postaci powoduje oddzielenie produk-tów zużycia o objętości równej zagłębieniu wytworzonemu przez ziarno twardej cząstki.
Rysowanie – nieznaczne odkształcenie plastyczne na powierzchni tarcia. Mechaniczno-chemiczna forma zużywania – pierwszy etap to zużywanie utle-
niające lub wodorowe, następnie oddziaływanie luźnych cząstek lub nierówności współpracującego elementu powoduje oddzielanie warstewki tlenków, zachodzi, gdy Hm / Hs > 0,6.
Nadmiernemu zużywaniu przez ścieranie zapobiega się poprzez:– dobór tworzyw konstrukcyjnych o dużej twardości, np. kompozyty
z węglikami wolframu, stale kobaltowe, proszki metali na osnowie chromu i boru itd.,
– dobór tworzyw o odpowiednio ukształtowanej strukturze (drobne ziarna),– stosowanie tworzyw o wysokiej granicy plastyczności (moduł Yunga),
dodawanie związków zwiększających ten moduł, np. cyna,– skuteczne uszczelnianie szczelin smarowych oraz smarując odpowiednio
układ, a także filtrując płyny robocze (np. oleje smarne, powietrze w sil-niku spalinowym, powietrze doprowadzone do sprężarki).
4) ZUŻYWANIE ZMĘCZENIOWE – występuje przy styku skoncentrowanym. Spowodowane jest zmęczeniem powierzchniowym (stykowym), które zacho-dzi w przypadku współpracy dwóch ciał sprężystych. Często występuje także w dobrze smarowanym węźle ślizgowym. W wyniku wielokrotnie powtarza-jących się styków w warstwie podpowierzchniowej na powierzchni ujawniają się mikropęknięcia, które, wychodząc na powierzchnię, powodują jej ubytki. Mechanizm powstawania zużycia zmęczeniowego jest następujący: napręże-nia własne i naprężenia pochodzące od obciążeń zewnętrznych nakładają się i osiągają swoje maksimum w punkcie największego wytężenia materiału,w tzw. punkcie Bielajewa (maksymalne naprężenia styczne występują na głę-bokości 0,39 długości rzeczywistego styku). Obciążenia cykliczne w wyniku ciągłe trących się elementów powodują ich zmęczenie, a w konsekwencji zużycie. Wyróżnia się dwa rodzaje tarcia zmęczeniowego (rys. 4.27):• zużywanieprzezłuszczenie(spalling):występujewsuchymstykupodczas
toczenia lub toczenia z poślizgiem, a także w styku słabo smarowanym (np. w słabo smarowanych łożyskach tocznych i przekładniach zębatych, w walcach hutniczych, w układach koło – szyna),

157
• zużywanieprzezwykruszanie(pitting):występujewsmarowanymstykupodczas toczenia lub toczenia z poślizgiem, składa się z trzech faz (zmę-czeniowe pękanie warstwy wierzchniej i tworzenie się mikroszczelin – rozklinowujące działanie oleju –wyrywanie nadwyrężonych fragmentów szczelin z warstwy wierzchniej wskutek adsorpcji oleju i rozciągających naprężeń w styku), np. łożyska toczne, przekładnie zębate, napędy krzyw-kowe.
Do zużycia zmęczeniowego zalicza się także pękanie i wykruszanie zmę-czeniowe warstw stopów łożyskowych oraz pękanie warstw wierzchnich wsku-tek zmęczenia cieplnego. Takiemu zużyciu podlegają stopy cyny i stopy ołowiu (babity), szczególnie przy dużych przekrojach odlewu.
Rys. 4.27. Schematyczne obrazy powierzchni zużytych zmęczeniowe: I — główka szyny zużyta przez spalling (rozmiary łusek są przesadzone), II — zużycie przez pitting; a) bież-nia pierścienia łożyska tocznego, b) bok zęba koła zębatego [1].
5) ZUŻYWANIE ODKSZTAŁCENIOWE – polega na zmianie kształtu lub wymiarów trących się elementów w wyniku odkształceń plastycznych. Masa elementów może przy tym się nie zmieniać. Zachodzi ono w wypadkach przeciążeń, obciążeń udarowych i drgań. Podlegają najczęściej miękkie stale i metale kolorowe. Przykładowe występowanie to styki dźwigni zaworowych silników spalinowych, wygniatanie bieżni przez elementy toczne w łożyskach, drgania łożysk, odkształcenia zębów kół, zużycie kół pojazdów szynowych.
a)
b)
walecpodzia³owy
I II

158
6) ZUŻYWANIE ADHEZYJNE (rys. 4.28) – proces niszczenia powierzchni wywołany tworzeniem się szczepień i zrostów w mikroobszarach rzeczywi-stej powierzchni styku. Sczepienia powstają wówczas, gdy współpracujące powierzchnie zbliżą się na odległość równą lub mniejszą od zasięgu działa-nia sił molekularnych, co ma miejsce przy braku warstw adsorbowanych lub tlenkowych (mających wiązania o charakterze niemetalicznym). Zużycie adhezyjne występuje przede wszystkim na wierzchołkach nierówności przy styku dwóch powierzchni metalicznych i jest ono tym bardziej intensywne, im większe wzajemne powinowactwo wykazują stykające się metale. Proces zachodzi przy małych prędkościach i dużych naciskach, przy niedostatecz-nym smarowaniu lub jego braku. Niewłaściwe skojarzenie materiałów (np. jednoimiennych lub powinowatych) przyczynia się do rozwoju tego zużycia. Duże naciski powodują przerwanie warstewki środka smarnego, a następnie ochronnej warstewki tlenków. Po zbliżeniu się odkrytych występów nierów-ności powierzchni na odległość działania sił międzyatomowych następuje ich sczepianie na zimno (adhezja I rodzaju) lub zrastanie tarciowe (adhezja II rodzaju), a następnie ścinanie tych połączeń. Sczepianie drugiego rodzaju utożsamiane jest niejednokrotnie z zużywaniem cieplnym. Proces ten jest intensyfikowany odkształceniami plastycznymi mikrowystępów powierzchni. Katastrofalną odmianą zużycia adhezyjnego jest „zacieranie”.
Rys. 4.28. Schemat ścinania złączy przy zużywaniu adhezyjnym [1].
Ten rodzaj zużywania powoduje na ogół znaczne uszkodzenia powierzchni i jest niedopuszczalny w eksploatacji maszyn. Intensywność zależy od wytrzyma-łości utworzonych połączeń adhezyjnych. Jeżeli wytrzymałość tych połączeń jest

159
mniejsza od wytrzymałości trących się metali, to ich ścięcie zachodzi w pierwot-nej płaszczyźnie podziału i ich zużycie jest minimalne. Jeżeli wytrzymałość połą-czenia jest większa od wytrzymałości jednego albo obydwóch metali, to zachodzi ścięcie w głębi słabszego metalu, w skrajnym wypadku wyrywanie cząstek z jego warstwy wierzchniej.
Zużycie adhezyjne występuje między innymi w wolnobieżnych łożyskach śli-zgowych, zespołach ślizgowych silników spalinowych (układ tłok – pierścienie tłokowe – cylinder, elementy rozrządu), przekładniach ślimakowych. Podsta-wowe metody zapobiegania to odpowiedni dobór materiałów poprzez wytworze-nie odpornych na sczepianie warstw wierzchnich (azotowanie, azotonasiarcza-nie, utlenianie, siarkoazotoutlenianie, siarkowanie) oraz powłok galwanicznych (miedziowanie, cynowanie, kobaltowanie). Pozytywne rezultaty przynosi rów-nież zwiększenie twardości i zmniejszenie plastyczności warstwy wierzchniej oraz dobór sposobu smarowania i właściwości środka smarnego.
Specyficznym rodzajem zużywania adhezyjnego jest tzw. zużywanie albo prze-noszenie selektywne. Stwierdzono, że przy tarciu stopów miedzi (brązy i mosią-dze) o stal, smarowanych gliceryną, jej spirytusowym roztworem lub specjal-nymi środkami smarnymi, zachodzi przenoszenie czystej miedzi na powierzchnię stalową, a w niektórych wypadkach powrót części tej warstwy na powierzchnie stopu miedzi. Analiza spektralna wykazała, że naniesiona na stal warstwa składa się głównie z czystej miedzi. Ponieważ miedź w brązie i mosiądzu znajduje się w roztworze stałym, może dojść do wniosku, że jej przenoszenie na stal jest proce-sem atomowym. Zauważono, że różne stopy miedzi zużywają się przy tym z różną intensywnością.
7) ZUŻYWANIE CIEPLNE – przy dużych prędkościach tarcia i dużych naci-skach w zespołach tribomechanicznych zwykle wytwarza się dużo ciepła. Na rzeczywistych powierzchniach styku może wtedy wystąpić mięknienie, zmiana struktury warstwy a nawet nadtapianie metalu. Sprzyja to odkształceniu war-stwy wierzchniej i odsłanianiu czystych powierzchni metali, co może pro-wadzić do zbliżenia warstw na odległość oddziaływania międzyatomowego. A staje się to przyczyną szczepiania powierzchni i uszkadzania powierzchni poprzez wyrywanie z niej cząstek i rozmazywanie na przeciwpowierzchni. Proces najczęściej przebiega lawinowo. Podstawowe przykłady występowania tego rodzaju zużycia to: zespoły tarcia funkcjonujące pod dużym obciążeniem niedostatecznie smarowane lub bez smarowania.
8) FRETTING – ZUŻYWANIE ŚCIERNO-KOROZYJNE (rys. 4.29) – pro-ces wywołany mikroprzemieszczeniami względnymi połączonych nominal-nie nieruchomowych elementów, spowodowanych bądź drganiami danego zespołu lub całej maszyny, bądź też ruchami roboczymi danego zespołu.

160
Mechanizm tego procesu polega na jednoczesnym oddziaływaniu adhezyj-nym – szczepianiu oraz intensywnym (dynamicznym) utlenianiu. Intensywne utlenianie powodowane jest zwiększoną reaktywnością warstwy wierzchniej wskutek naprężeń stykowych i odkształceń. Powierzchnie zużyte przez frett-ting są pokryte nalotami tlenków, plamami, pęknięciami i wyrwaniami oraz proszkiem – produktami zużycia. Proces zachodzący w nominalne spoczyn-kowych złączach takich, jak złącza wpustowe i wielowypustowe, złącza wci-skowe wałów z wirnikami, połączenia nitowe, śrubowe itp. Występowanie w styku nominalnie nieruchomym obszarów przylegania i obszarów mikro-poślizgów jest związane z występowaniem w nim dwóch odmiennych mecha-nizmów zużycia. I tak, obszary przylegania podlegają pękaniu na wzór zmę-czenia stykowego, natomiast obszary mikropoślizgów podlegają zużyciu adhezyjnemu, charakterystycznemu dla tarcia ślizgowego. Zarówno w pierw-szym, jak i w drugim przypadku, w trakcie eksploatacji powstają produkty zużycia (zmęczenia stykowego lub zużycia adhezyjnego). Produkty te stano-wią tzw.„trzecie ciało”, które pozostaje w styku ciernym, biorąc aktywny udział w procesie tribologicznym i przyspieszając zużycie przez fretting, szczególnie w jego ostatniej fazie, przebiegającej w sposób katastrofalny. Dodatkowym czynnikiem, wpływającym na intensyfikację tego rodzaju zużycia, są procesy korozyjne, towarzyszące wszystkim stadiom niszczenia. Produktami zużycia są najczęściej tlenki metali, o twardości większej od materiału rodzimego.
Rys. 4.29. Model warstewki powierzchniowej przy frettingu: a) sczepianie, b) utlenianie dynamiczne [1].
Podstawowe metody przeciwdziałania zużyciu przez fretting: – całkowite rozdzielenie stykających się powierzchni (powłoki),– wykluczenie możliwości wzajemnych mikroprzesunięć stykających się
elementów,– zmniejszenie przesunięć przez odpowiednie ukształtowanie węzła,– zmniejszenie siły tarcia,– stosowanie odpowiednich tworzyw konstrukcyjnych (utwardzane mate-
riały charakteryzują się większą odpornością na zużycie).

161
Literatura
1. Lawrowski Z., Tribologia. Tarcie zużywanie, smarowanie. Wydawnictwo Poli-techniki Wrocławskiej, Wrocław 2008.
2. Niziński S., Eksploatacja obiektów technicznych. Instytut Technologii Eksplo-atacji, Radom 2002.
3. Nosal S., Wprowadzenie do zagadnień tarcia, zużywania i smarowania. Poli-technika Poznańska w Poznaniu 2012.
4. Stachowiak G. W., Batchelor W. A., Engineereing Tribology. Elselver Oxford 2005.
5. Szczerek M., Wiśniewski M., Tribologia i Tribotechnika, Instytut Technologii Eksploatacji, Radom 2000.
6. www.tribologia.pl


163
5. Materiały eksploatacyjne
5.1. Paliwa
Paliwem nazywamy substancję, z której w czasie spalania istnieje możliwość odzyskania energii chemicznej [8].
Paliwa stosowane w nowoczesnych silnikach spalinowych powinny charakte-ryzować się [1, 7]:
– łatwością do tworzenia jednorodnej mieszaniny paliwowo-powietrznej,– prawidłowością przebiegu spalania w całym zakresie warunków eksplo-
atacji,– wysoką wartością opałową paliwa oraz mieszaniny palnej,– niewielkim zapotrzebowaniem powietrza do spalania jednostki masy
paliwa,– niezmiennymi właściwościami w różnych warunkach składowania, trans-
portu i eksploatacji,– brakiem bądź niewielką skłonnością do tworzenia smolistych lub twar-
dych osadów,– brakiem bądź nieznaczną ilością popiołu po spaleniu,– brakiem własności korozyjnych,– dostatecznie niską temperaturą krzepnięcia lub zamarzania,– minimalną zawartością zanieczyszczeń mechanicznych i wody.Paliwa podzielić można, ze względu na stan skupienia, na stałe, płynne
i gazowe.
Paliwa stałeW wielu ośrodkach naukowych prowadzono badania nad zastosowaniem
paliw stałych do napędu silników spalinowych. Prowadzone próby obejmowały spalanie w silniku [6]:– pyłu węglowego bezpośrednio wdmuchiwanego do cylindra,– zawiesiny pyłu węglowego w oleju napędowym (do 50% węgla),– zawiesiny pyłu węglowego, oleju napędowego i wody (do 70% węgla),– zawiesiny sadzy w oleju napędowym.Ze względu na uszkodzenia powstałe wskutek kontaktu twardych cząstek
paliwa (np. pyłu węglowego) z elementami silnika (np. gładź cylindryczna) zna-cząco obniżała się jego trwałość. Z tego powodu, poza testami przeprowadzonymi w ośrodkach badawczych, ten rodzaj paliwa nie jest obecnie stosowany w warun-kach przemysłowych.

164
Paliwa płynneW produkcji przemysłowej największe znacznie mają paliwa płynne.Do paliw płynnych zaliczyć można:– benzyny bezołowiowe (stosowane do napędu silników z zapłonem iskro-
wym),– oleje napędowe (stosowane do napędu silników z zapłonem samoczyn-
nym),– alkohole i ich mieszanki, np. E85 (stosowane do napędu silników z zapło-
nem iskrowym),– estry kwasów tłuszczowych (głównie estry metylowe i etylowe oleju rze-
pakowego, stosowane do napędu silników z zapłonem samoczynnym),– inne, np. nafta.
Benzyna bezołowiowa to mieszanina węglowodorów o temperaturach wrze-nia 25÷210°C. Produkowana jest z ropy naftowej. W procesie produkcyjnym wyróżnić można dwa etapy [8]:
– pierwotny – obejmuje procesy rozdziału ropy na frakcje oraz procesy rafi-nacyjne (oczyszczania), w których otrzymuje się produkty względnie pół-produkty, gdzie nie nastąpiły zmiany strukturalne związków wchodzących w skład ropy,
– wtórny – obejmuje procesy destrukcyjnej przeróbki produktów nafto-wych, w czasie przebiegu których następuje zmiana składu chemicznego związków (procesy termiczne i katalityczne).
Benzyny bezołowiowe wyparły z rynku etyliny, które zawierały w swym skła-dzie duże ilości ołowiu. W Polsce nabyć można benzyny bezołowiowe o liczbie oktanowej 95 i 98. Przeznaczone są one do napędu silników z zapłonem iskro-wym, gdzie zapłon w cylindrze inicjowany jest przez iskrę generowaną przez świecę zapłonową.
Benzyny bezołowiowe to mieszaniny [8]: – pięcio- i sześcioczłonowych węglowodorów naftenowych,– rozgałęzionych i prostołańcuchowych węglowodorów parafinowych i ole-
finowych,– węglowodorów aromatycznych,– węglowodorów o strukturze mieszanej,– wysokooktanowych organicznych związków tlenowych (metanol, eta-
nol, t-butanol, eter metylo-tert-butylowy, eter etylo-tert-butylowy, eter metylo-tert-amylowy, inne).
W celu nadania benzynie odpowiednich właściwości stosuje się dodatki w ilo-ści do 1500 mg/kg i są to [1, 8]:

165
– detergenty (zapobiegają powstawaniu osadów, w układzie zasilania pali-wem),
– inhibitory korozji (zabezpieczają przed wpływem korozyjnym benzyny),– demulgatory (zapobiegają tworzeniu emulsji i tym samym pomagają
w separacji wody),– antyutleniacze (zapobiegają tworzeniu żywic),– inne (dodatki barwiące, dodatki zapachowe, znaczniki pozwalające na
identyfikację producenta itp.). Na przebieg procesu spalania benzyny w silniku spalinowym znaczący
wpływ ma jej jakość. Wymagania jakościowe dla benzyn stosowanych do napędu w pojazdach wyposażonych w silniki iskrowe reguluje Rozporządzenie Ministra Gospodarki z dnia 9 grudnia 2008 r.
Jednym z najważniejszych parametrów charakteryzujących jakość benzyny jest jej liczba oktanowa. Jest to wskaźnik opisujący odporność mieszanki pali-wowo-powietrznej na spalanie detonacyjne (stukowe). Spalanie detonacyjne jest niepożądane i skutkuje twardą pracą silnika oraz obniża jego trwałość. Występuje wówczas, gdy liczba oktanowa paliwa jest zbyt niska. Liczbę oktanową wyznacza się na silniku wzorcowym, porównując spalanie detonacyjne paliwa wzorcowego (mieszanka izooktanu i heptanu) z badaną benzyną. Jeśli paliwo wzorcowe spala się tak samo jak badane, to liczba oktanowa badanego paliwa jest równa zawarto-ści procentowej izooktanu w mieszance wzorcowej [1, 8].
Wyróżnia się następujące normy wyznaczania liczby oktanowej:– RON (Research Octane Number) – pomiar na jednocylindrowym sil-
niku wzorcowym o zmiennym stopniu sprężania pracującym z prędkością 600 obr/min,
– MON (Motor Octane Number) – pomiar na jednocylindrowym silniku wzorcowym o zmiennym stopniu sprężania pracującym z prędkością 900 obr/min,
– DON (roaD Octane Number ) – obliczana z zależności (RON+MON)/2.
Dodatek do benzyny alkoholu lub eterów powoduje zwiększenie liczby okta-nowej.
W Polsce na stacjach paliw dostępne są benzyny o liczbie oktanowej 95 i 98. Są to minimalne wartości liczby oktanowej wyznaczone metodą RON (Rese-arch Octane Number). W niektórych krajach (np. Stany Zjednoczone, Australia) na dystrybutorach podawane są wartości minimalnej liczby oktanowej benzyny wyznaczone metodą DON (roaD Octane Number). Liczba oktanowa wyznaczona metodą MON (Motor Octane Number) jest mniejsza o kilka oktanów od liczby oktanowej wyznaczonej metodą RON (Research Octane Number) i dla benzyn oferowanych w Polsce wynosi odpowiednio 85 dla benzyny bezołowiowej 95 i 88 dla benzyny bezołowiowej 98 [10, 12].

166
Kolejnym parametrem opisującym jakość benzyn jest gęstość. Ze względu na zmianę gęstości na skutek zmiany temperatury wyznacza się ją w temperatu-rze 15°C. Dla benzyn oferowanych w Polsce powinna ona wynosić w granicach 720-775 kg/m3. Jest to parametr szczególnie istotny, w czasie szacowania ilości magazynowanego paliwa w zbiornikach na stacjach paliw. Ze względu na roz-szerzalność cieplną paliwa, szacowanie ilości paliwa tylko na podstawie objętości obarczone jest dużym błędem [1, 10, 12].
Elementy układów zasilania silników spalinowych wykonane są często z mie-dzi i jej stopów. Materiały te są podatne na oddziaływanie związków zawartych w benzynach i oleju napędowym. W celu zapobieżenia uszkodzeniom układów zasilania silnika, paliwa poddawane są testom działania korodującego na miedź (3h w temperaturze 50°C). Badanie pozwala określić nadmierną ilość związków wywołujących korozję układu zasilania. Procesy korozyjne wywoływane są głów-nie przez siarkę, kwasy i zasady zawarte w paliwie. Test polega na moczeniu pró-bek miedzianych w paliwie o temperaturze 50°C w ciągu 3h. Klasy stopnia sko-rodowania próbek nadaje się po wizualnym porównaniu z wzornikiem klas (rys. 5.1) [8, 10, 12].
Rys. 5.1. Wzornik klas dla testu określającego działanie korodujące na miedź.
Paliwa oferowane w Polsce (zarówno benzyny, jak i oleje napędowe) powinny uzyskać klasę 1 [10, 12].
Jak wspomniano wcześniej, siarka zawarta w paliwie wywołuje procesy koro-zyjne podzespołów silnika. Dodatkowo przyczynia się do zanieczyszczenia śro-dowiska naturalnego. W latach 1999-2012 zredukowano dopuszczalną zawar-

167
tość siarki w benzynie o 98% i w oleju napędowym o 99,5%. Obecnie jej dopusz-czalna zawartość wynosi maksymalnie 10 mg/kg. Stosowanie paliw zasiarczonych wymaga częstszych wymian oleju w silniku [10, 12].
Benzyny to mieszaniny węglowodorów o różnych właściwościach. Bardzo istotnym parametrem jest ich odpowiednia kompozycja. Nadmiar frakcji lekkich wywołuje niebezpieczeństwo powstania korków gazowych w przewodach paliwo-wych, niedobór zaś utrudnia rozruch silnika. Frakcje średnie wpływają na stabil-ność pracy silnika, zaś ciężkie powodują zwiększone zużycie podzespołów silnika oraz generują osady spowodowane niepełnym spalaniem. Skład frakcyjny to para-metr regulujący odpowiednią kompozycję poszczególnych grup węglowodorów wchodzących w skład benzyny. Na terenie Polski skład frakcyjny benzyny zależny jest od pory roku i wynosi on odpowiednio [8, 10, 12]:
– 20-48% objętości benzyny stanowią węglowodory o temperaturach wrze-nia do 70°C (wartość obowiązująca od 1 maja do dnia 30 września),
– 20-50% objętości benzyny stanowią węglowodory o temperaturach wrze-nia do 70°C (wartość obowiązująca od 1 marca do 30 kwietnia oraz od 1 października do 31 października),
– 22-50% objętości benzyny stanowią węglowodory o temperaturach wrze-nia do 70°C (wartość obowiązująca od 1 listopada do końca lutego),
– 46-71% objętości benzyny stanowią węglowodory o temperaturach wrze-nia do 100°C (wartość obowiązująca cały rok),
– minimum 75% objętości benzyny stanowią węglowodory o temperatu-rach wrzenia do 150°C (wartość obowiązująca cały rok),
– temperatura końca destylacji 210°C (wartość obowiązująca cały rok).Parametrem powiązanym ze składem frakcyjnym jest prężność par. Jest to
ciśnienie wywierane przez pary benzyny. Wysoka prężność par powoduje wysokie straty benzyny w czasie transportu i magazynowania. W sezonie letnim (od 1 maja do dnia 30 września) parametr ten powinien wynosić od 45 do 60 kPa. Wówczas nie jest wymagana tak duża ilość frakcji lekkich w paliwie. Zbyt duża prężność par w sezonie letnim powoduje duże straty związane z parowaniem paliwa. W okresie przejściowym (od 1 marca do 30 kwietnia oraz od 1 października do 31 paździer-nika) prężność par powinna wynosić od 45 do 90 kPa, a w zimowym (od 1 listo-pada do końca lutego) od 60 do 90 kPa. Zbyt niska prężność par benzyny w sezo-nie zimowym to utrudniony rozruch silnika [8, 10, 12].
Od kilku lat w UE dopuszczone do obrotu są tylko benzyny bezołowiowe. W swym składzie ze względu na ochronę środowiska zawierają one niewielkie ilo-ści ołowiu. Benzyny bezołowiowe wyparły z rynku etyliny, których liczbę okta-nową modyfikowano tetraetyloołowiem. Dopuszczalna zawartość ołowiu w ben-zynie bezołowiowej wynosi 5mg/dm3 [10, 12].
Do zanieczyszczeń, jakie zawiera benzyna i olej napędowy zaliczyć można wodę. Jej nadmiar destabilizuje pracę silnika, a jej ilość nie powinna być więk-

168
sza niż 200mg/kg [10, 12]. Najczęściej woda znajdująca się w paliwie to efekt nie-właściwego transportu, magazynowania i tankowania. Na rys. 5.2. przedstawiono przyrząd do oznaczania zawartości wody wg EN ISO 12937:2000.
Rys. 5.2 Przyrząd do oznaczania zawartość wody Aquamax.

169
Olej napędowy to mieszanina węglowodorów od C11H24 do C18H38, o tem-peraturze wrzenia między 150÷360°C. Produkowany jest z ropy naftowej i tak jak w przypadku produkcji benzyn, wyróżnić można dwa etapy produkcyjne: pier-wotny i wtórny. Przeznaczony jest do napędu silników z zapłonem samoczynnym. W tym rodzaju silnika paliwo pod dużym ciśnieniem wtryskiwane jest do cylin-dra ze sprężonym powietrzem. Zapłon następuje w wyniku zjawisk towarzyszą-cych procesowi wtrysku [1].
W celu nadania olejom napędowym odpowiednich właściwości stosuje się dodatki [1]:
– detergenty (zapobiegają powstawaniu osadów w układzie zasilania pali-wem),
– inhibitory korozji (zabezpieczają przed wpływem korozyjnym oleju napę-dowego),
– depresatory (zapobiegają wydzielaniu węglowodorów n-parafinowych); – demulgatory (zapobiegają tworzeniu emulsji i tym samym pomagają
w separacji wody),– antyutleniacze (zapobiegają tworzeniu żywic),– biocydy (zapobiegają rozwojowi mikroorganizmów),– dodatki smarnościowe (poprawiają trwałość filmu pokrywającego
ruchome elementy układu zasilania),– inne (dodatki barwiące, dodatki zapachowe, znaczniki pozwalające na
identyfikację producenta itp.).Oleje napędowe produkowane w różnych okresach roku mają różne właści-
wości eksploatacyjne.Na przebieg procesu spalania oleju napędowego w silniku spalinowym zna-
czący wpływ ma jego jakość. Wymagania jakościowe dla oleju napędowego stoso-wanego w pojazdach wyposażonych w silnik z zapłonem samoczynnym reguluje Rozporządzenie Ministra Gospodarki z dnia 2 lutego 2012 r.
Do istotnych parametrów jakościowych oleju napędowego należy liczba cetanowa. Jest to zdolność oleju napędowego do samozapłonu i zależna jest od składu chemicznego paliwa. Liczbę cetanową wyznacza się na silniku wzor-cowym, porównując czas zapłonu paliwa wzorcowego (mieszanka cetanu i α-metylonaftalenu) z badanym olejem napędowym. Jeśli paliwo wzorcowe spala się tak samo jak badane, to liczba cetanowa badanego paliwa jest równa zawarto-ści procentowej cetanu w mieszance wzorcowej. Zbyt niska wartość liczby ceta-nowej wywołuje „twardą” pracę silnika, zwiększoną emisję sadzy i zwiększone zużycie paliwa. W Polsce olej napędowy dopuszczony do obrotu powinien posia-dać liczbę cetanową większą niż 51. Do oszacowania liczby cetanowej stosowany jest także indeks cetanowy. Indeks cetanowy oleju napędowego można obliczyć ze składu grupowego, korzystając z zależności [1]:
(5.1),

170
gdzie: Al. (alkany), Cy (cykloalkany), Ar (areny) – zawartości masowe węglowodorów.
Dla oleju napędowego indeks cetanowy powinien wynosić co najmniej 46 [10, 12].
Kolejnym parametrem, opisującym jakość oleju napędowego, jest gęstość. Dla oleju napędowego oferowanego w Polsce powinna ona wynosić w granicach 820-845 kg/m3 dla oleju o standardowej jakości i 800-840 kg/m3 dla oleju o pod-wyższonych właściwościach. Im większa gęstość, tym większa masa wtryskiwa-nego paliwa [10, 12].
Ze względu na jakość procesu wtrysku znaczący wpływ na jakość pracy sil-nika ma lepkość oleju napędowego. Jej wartość zmienia się wraz ze zmianą tem-peratury, dlatego wyznacza się ją w temperaturze 40°C. Powinna ona wynosić od 2,0 do 4,5 mm2/s dla oleju standardowego i od 1,5 do 4,0 mm2/s dla olej napędo-wego o podwyższonych właściwościach.
Lepkością nazywamy wewnętrzne tarcie występujące przy przesuwaniu się względem siebie dwóch warstw cieczy pod wpływem działania sił zewnętrz-nych. Optymalna lepkość oleju napędowego zapewnić ma należyty wtrysk paliwa do komory spalania, minimalne smarowanie i uszczelnianie pomp paliwowych i wtryskiwaczy. Zbyt wysoka lepkość powoduje kroplenie z wtryskiwaczy, zaś zbyt mała – nadmierne zużycie elementów pompy wtryskowej. Na rysunku 5.3 przed-stawiono lepkościomierz miniAV [1, 10, 12].
Rys. 5.3. Lepkościomierz miniAV (test zgodny z ISO 3104:1996).

171
Elementy układów wtryskowych silników z zapłonem samoczynnym są wykonywane z dużą precyzją. Wszelkiego rodzaju zanieczyszczenia mechaniczne zawarte w oleju napędowym (opiłki żelaza, piasek itp.) mogą je uszkodzić. Dla-tego w oleju napędowym monitorowana jest dopuszczalna ilość zanieczyszczeń mechanicznych. Nie powinna być ona większa niż 24 mg/kg [10, 12]. Ich ilość wyznaczana jest przy użyciu specjalistycznych wirówek.
Kolejnym parametrem charakteryzującym jakość oleju napędowego jest tem-peratura zapłonu. Jest to najniższa temperatura, w której pary paliwa w zetknięciu z płomieniem zapalają się. Własność ta związana jest z lotnością paliwa i zależy od zawartości w nim niskowrzących frakcji. Temperatura zapłonu oleju napędo-wego powinna wynosić co najmniej 55°C. Na rysunku 5.4. przedstawiono przy-rząd NPV 220 do oznaczania temperatury zapłonu wg ISO 3679 [10, 12].
Rys. 5.4. Przyrząd NPV 220 do oznaczania temperatury zapłonu wg ISO 3679.
Do komponowania olejów napędowych stosowane są zasadniczo frakcje o zakresie wrzenia do 360°C. Wprowadzenie frakcji lżejszych zwiększa lotność paliwa i ułatwia rozruch silnika, może jednak pogorszyć samozapłon paliwa. Obecność frakcji zbyt cięższych utrudnia tworzenie się mieszanki paliwowo--powietrznej, powoduje niezupełne spalanie, dymienie i zwiększenie ilości powstających nagarów [1].
Na terenie Polski skład frakcyjny oleju napędowego wynosi odpowiednio [10, 12]:
– dla oleju o standardowych właściwościach:■ 65% objętości oleju napędowego stanowią węglowodory o temperatu-
rach wrzenia do 250°C,

172
■ 85% objętości oleju napędowego stanowią węglowodory o temperatu-rach wrzenia do 350°C,
■ 95% objętości oleju napędowego stanowią węglowodory o temperatu-rach wrzenia do 360°C,
– dla oleju o podwyższonej jakości:■ 10% objętości oleju napędowego stanowią węglowodory o temperatu-
rach wrzenia do 180°C,■ 95% objętości oleju napędowego stanowią węglowodory o temperatu-
rach wrzenia do 340°C.Eksploatacja pojazdów wyposażonych w silniki z zapłonem samoczynnym
w sezonie zimowym wiąże się z ryzykiem zablokowania przez parafinę filtrów paliwowych. Temperatura zablokowania zimnego filtra, CFPP jest to najwyższa temperatura, w której kryształy węglowodorów w paliwie osiągają wielkość powo-dującą zatkanie filtrów paliwowych. Średnia wartość temperatury zablokowania zimnego filtra dla standardowego oleju napędowego, wyprodukowanego przez PKN ORLEN, w sezonie zimowym wynosi około -24°C. Zgodnie z obowiązują-cymi w Polsce normami stosowalność temperaturowa oleju napędowego uzależ-niona jest od pory roku, w jakiej został on wyprodukowany.
Oleje napędowe wyprodukowane w Polsce mają następujące temperatury eks-ploatacyjne [10, 12]:
– dla oleju o standardowych właściwościach:■ minimalnie 0°C dla oleju wyprodukowanego w okresie od 16 kwietnia
do 30 września,■ minimalnie -10°C dla oleju wyprodukowanego w okresie od 1 marca
do 15 kwietnia oraz od 1 października do 15 listopada,■ minimalnie -20°C dla oleju wyprodukowanego w okresie od 16 listo-
pada do końca lutego,– dla oleju o podwyższonej jakości:
■ minimalnie -32°C przez cały rok.
W celu obniżenia temperatury zablokowania zimnego filtra, do oleju napędowego należy dodać odpowiednie środki uszlachetniające (depresator) takie jak np. Diesol.
Zablokowanie zimnego filtra paliwowego poprzedza zmętnienie paliwa. Jest to temperatura, przy której zaczyna się obserwować zmętnienie na skutek poja-wienia się mikrokryształów węglowodorów lub też lodu (w przypadku zawodnie-nia paliwa). Temperatura ta jest o kilka stopni wyższa od temperatury zablokowa-nia zimnego filtra. Dla oleju o standardowych właściwościach nie wyznacza się jej, zaś dla oleju o podwyższonych właściwości maksymalna temperatura mętnienia wynosi -22°C [1].
W ostatnich latach do oleju napędowego dodawane są estry oleju rzepako-wego w celu zwiększenia udziału paliw odnawialnych (ekopaliw) w gospodarce.

173
Ze względu na swe właściwości przyczyniają się do zmniejszenia zanieczyszczenia środowiska. Wadą tego rozwiązania jest wzrost zużycia paliwa (niska kalorycz-ność estrów metylowych) i zmniejszenie stabilności oraz trwałości oleju napę-dowego. Zawartość estrów kwasów tłuszczowych nie powinna przekraczać 7% [10, 12].
W Polsce alkohole stosowane są głównie jako domieszki do benzyn bezołowio-wych (do 5%). W ciągu kilku ostatnich lat zwiększył się ich udział w rynku paliw. Spowodowane jest to tym, iż są to paliwa pochodzenia organicznego (biopaliwa). Charakteryzuje je mniejsza kaloryczność w porównaniu z benzyną i olejem napędo-wym. Paliwem, jakie można nabyć w Polsce, które produkowane jest na bazie alko-holu, jest benzyna E85. W jej skład wchodzi co najmniej 70-75% etanolu i alkoholi wyższych. Co najmniej 14% składu E85 stanowi benzyna bezołowiowa [6, 10, 12].
Innym rodzajem biopaliw są estry kwasów tłuszczowych. Są to głównie estry oleju rzepakowego. Na stacjach paliw paliwo to można nabyć pod nazwą B100 (100% estrów oleju rzepakowego). Stosowane są także jako domieszki do oleju napędowego (od 2012 roku w ilości do 7%). Podobnie jak alkohole, charaktery-zuje je mniejsza kaloryczność w porównaniu z benzyną i olejem napędowym. Na rysunku 5.5 przedstawiono zdjęcie instalacji do produkcji FAME metodą estryfi-kiacji, jaką zaprojektowano i wykonano w Katedrze Budowy Eksploatacji Pojaz-dów i Maszyn UWM w Olsztynie. Urządzenie wykonano w ramach projektu klu-czowego nr POIG.01.01.02-00-016/08 pt. Modelowe kompleksy agroenergetyczne jako przykład kogeneracji rozproszonej opartej na lokalnych i odnawialnych źró-dłach energii. W metodzie estryfikacji jako komponenty używa się olej rzepakowy, alkohol metylowy i KOH jako katalizator. Komponenty miesza się w następują-cych proporcjach:
– 100 dm3 oleju rzepakowego,– 14,2 dm3 alkoholu metylowego,– 1,57 kg KOH.Produktem procesu estryfikacji są estry metylowe oleju rzepakowego i pozo-
stałości poprodukcyjne (gliceryna, metanol, KOH itp.).
Rys. 5.5. Instalacja do produkcji estrów kwasów tłuszczowych (FAME).

174
Paliwa gazoweDo paliw gazowych zaliczyć można [6]:– gaz generatorowy (powstaje ze zgazowania rozmaitych paliw stałych, np.
drewna, węgla, butelek PET, biomasy itp.; jest mieszaniną: wodoru, tlenku węgla, metanu, pary wodnej, dwutlenku węgla i azotu; ma kaloryczność 4-5,5 MJ/m3
n),– gazy sprężone (przechowywane pod ciśnieniem do 37 MPa):
• gazkoksowy(produktuboczny,powstającyprzywytwarzaniukoksu),• gazświetlny(powstajeprzezsuchądestylacjęwęgla),• gaznaturalnyCNG(gazziemny),• wodór,
– gazy skroplone (LPG, LNG).
W wielu ośrodkach krajowych, jak i zagranicznych prowadzone są na szeroką skalę badania nad opracowaniem technologii zgazowywania różnych materia-łów takich, jak biomasa, śmieci itp. Ma to na celu opracowanie nowych techno-logii produkcji gazu generatorowego. Działania te mogą pozytywnie wpłynąć na zwiększenie udziału biopaliw w gospodarce światowej. W przypadku silników tło-kowych gaz generatorowy wykorzystywany jest głównie do zasilania silników sta-cjonarnych, napędzających prądnice.
W przypadku silników zamontowanych w pojazdach wykorzystuje się głów-nie gazy skroplone LPG i w niewielkim stopniu gaz ziemny CNG.
Gaz LPG to mieszanina [6, 11]:– propanu (C3H8),– propylenu (C3H6),– butanu (C4H10),– butylenu (C3H6),– butadienu (C4H6),– metanu (C1H4),– etanu (C2H6),– etylenu (C2H4),– pentanów, pentenów i wyższych (C5).
Instalacje gazowe LPG są szeroko stosowane do zasilania silników z zapłonem iskrowym. Charakteryzuje je niska cena i niewielka masa w odróżnieniu do insta-lacji CNG. Na terenie kraju istnieje gęsta sieć dystrybucji tego rodzaju paliwa. Zupełnie inna sytuacja jest w przypadku stacji oferujących w swej ofercie handlo-wej CNG. W tabeli 5.1 przedstawiono zestawienie wybranych parametrów jako-ściowych LPG i CNG.

175
tabela 5.1. Wybrane parametry jakościowe LPG i CNG [6, 11].
Parametr LPG CNGWartość opałowa [MJ/kg] 46,1 50
Zapotrzebowanie powietrza [kg/kg] 15,7 17,2Liczba oktanowa 115 130Gęstość [kg/m3] 536 (15°C; 1,5MPa) 0,717 (0°C; 0,1MPa)
Prędkość spalania laminarnego [m/s] 0,83 0,34Temperatura samozapłonu [°C] 500 645
Temperatura wrzenia [°C] -47 -162
Wodór traktowany jest jako paliwo przyszłości (Strategia Rozwoju UE). Pro-duktem jego spalania jest woda, co nie powoduje zwiększenia emisji gazów cie-plarnianych. Ma on bardzo wysoką kaloryczność.
W tabeli 5.2 przedstawiono wartości opałowe wybranych paliw płynnych i gazowych.
tabela 5.2. Wartości opałowe wybranych paliw płynnych i gazowych [1, 6, 8].
Paliwo WartośćBenzyna 43,55 MJ / kg
E85 28,98 MJ / kg (22,7 MJ/ dm3)Olej napędowy 42,29-43,13 MJ / kg
LPG 46,1 MJ / kg (22.1 MJ/ dm3)CNG 35 MJ / m3
Metan 50,05 MJ / kgEtanol 24,9-26,8 MJ / kg
Metanol 19,66-19,75 MJ / kgWodór 120 MJ / kg
5.2. Środki smarne
Środki smarne to materiały eksploatacyjne, służące do zmniejszenia tarcia między ruchomymi elementami maszyn (tabela 5.3.).
Środki smarne stosowane są też w celu [5]:– zmniejszenia zużycia części maszyn,– ochrony przed nadmiernym rozgrzewaniem,– uszczelnienia skojarzonych par trących,– ochrony przed korozją,– utrzymania w czystości elementów maszyn.

176
tabela 5.3. Rodzaje tarcia [5, 9].
Nazwa Współczynnik tarcia Postać opis
Tarcie suche 0,2-0,8
Tarcie występujące w skojarzeniu trącym, gdy współpracujące powierzchnie nie są lub są częściowo rozdzielone środkiem smarnym.
Tarciepółsuche
(mie-szane)
0,01-0,2
Tarcie występujące w skojarzeniu trącym, gdy współpracujące powierzchnie skojarze-nia trącego są częściowo oddzielone od siebie środkiem smarnym, a stykają się ze sobą tylko nierównościami.
Tarcie graniczne 0,05-0,4
Tarcie występujące w skojarzeniu trącym, gdy współpracujące powierzchnie skojarze-nia trącego są oddzie-lone od siebie środkiem smarnym, lecz jest on bardzo cienki i nie-trwały.
Tarcie płynne 0,002-0,01
Tarcie występujące w skojarzeniu trącym, gdy współpracujące powierzchnie skojarze-nia trącego są całkowi-cie oddzielone od siebie środkiem smarnym.
Środki smarne powinny charakteryzować się [5]:– wysoką smarnością (zdolność do zmniejszania tarcia),– nie powinny reagować z materiałami konstrukcyjnymi lub reagować
w sposób kontrolowany,– powinny zachowywać swoje właściwości przez możliwie długi okres
czasu,– nie powinny ulegać degradacji w czasie magazynowania,

177
– nie powinny negatywnie oddziaływać na środowisko naturalne,– nie powinny stwarzać zagrożenia pożarowego,– powinny zachowywać swe właściwości w całym zakresie temperatur
i ciśnień roboczych,– powinny dawać się łatwo utylizować. Do smarowania elementów par ślizgowych stosuje się następujące środki
smarne:– gazowe (np. powietrze, azot, dwutlenek węgla) [5],– płynne:
• pochodzeniamineralnego(zropynaftowejlubwęgla),• pochodzeniaorganicznego(zwierzęceiroślinne),• pochodzeniasyntetycznego,
– maziste (plastyczne),– stałe (o budowie krystalicznej i o budowie bezpostaciowej).
Płynne środki smarneOleje smarowe należą do grupy płynnych środków smarnych. Są to ciecze
w warunkach stosowania, dostosowane do skojarzeń trących, z zastosowaniem odpowiedniej techniki smarowania.
W przypadku płynnych środków smarnych wyróżnić można następujące rodzaje smarowania [5]:
– hydrostatyczne (warstwa rozdzielającego środka smarnego trące elementy wytwarzana jest przez urządzenia zewnętrzne takie, jak np. pompa),
– hydrodynamiczne (smarowanie polega na rozdzieleniu współpracujących powierzchni samoistnie powstałym klinem smarowym, w którym ciśnie-nie równoważy istniejące obciążenie),
– hybrydowe,– elastohydrodynamiczne.Wśród olejów wyróżnić można:– oleje silnikowe,– oleje przekładniowe,– oleje przemysłowe,– oleje hydrauliczne,– oleje elektroizolacyjne,– oleje do obróbki metali,– oleje do sprężarek,– oleje konserwacyjne,– oleje do specjalnych zastosowań (np. stosowane w maszynach przemysłu
spożywczego).
Każdy olej smarowy jest kompozycją składającą się z [5]:

178
– oleju bazowego (wyróżniamy oleje bazowe mineralne, syntetyczne i mie-szane),
– zestawu dodatków uszlachetniających:– wiskozatory (wzrost lepkości, obniżenie temperatury płynięcia),– depresatory (obniżenie temperatury płynięcia),– detergenty i dyspergatory (poprawa właściwości myjących i neutrali-
zujących osady oraz zanieczyszczenia),– dodatki antykorozyjne, antyrdzewne i antyutleniające,– dodatki antypienne,– modyfikatory tarcia,– dodatki przeciwzużyciowe.
W celu optymalnego doboru oleju do warunków pracy, posłużyć się można klasyfikacjami lepkościowymi i jakościowymi.
Klasyfikacja lepkościowa umożliwia odpowiedni dobór oleju smarowego ze względu na panujące warunki środowiskowe.
Wyróżnić można następujące klasyfikacje lepkościowe: – dla olejów silnikowych SAE J300MAR93,– dla olejów przekładniowych, samochodowych SAE J306MAR85,– dla olejów przemysłowych (przekładniowych, hydraulicznych, sprężarko-
wych, turbinowych itp.) ISO 3448.
Klasyfikacja opracowana przez Society of Automotive Engineers (SAE), dzieli oleje silnikowe na 11 klas (tabela 5.4).
tabela 5.4. Klasyfikacja dla olejów silnikowych SAE J300MAR93.
Klasy dla olejów zimowych Klasy dla olejów letnich25W do -10°[C] 20 do 10° [C]20W do -15° [C] 30 do 20° [C]15W do -20° [C] 40 do 35° [C]10W do -25° [C] 50 do 50° [C]5W do -30° [C] 60 do 60° [C]0W do -35° [C]
Przykład oznaczeń zgodnych z SAE J300MAR93 przedstawiono na rysunkach 5.6 i 5.7.

179
Rys. 5.6. Stosowalność termiczna olejów zgodnych z SAE J300MAR93.
Rys. 5.7. Przykład oznaczeń zgodnych z SAE J300MAR93.

180
Klasyfikacja jakościowa umożliwia odpowiedni dobór oleju smarowego ze względu na zastosowane rozwiązania konstrukcyjne.
Wyróżnić można następujące klasyfikacje jakościowe:– według ACEA – klasyfikacja europejskiego stowarzyszenia producentów
samochodów (Association des Constructeurs Européens dAutomobile),– według API – klasyfikacja amerykańskiego instytutu nafty (American
Petroleum Institute),– według MIL-L – wojskowa klasyfikacja amerykańska; – według producentów silników: np. Mercedes Benz (MB), Volkswagen
(VW), Volvo, MAN, Ford itp.
Klasyfikacja Association des Constructeurs Européens dAutomobile (ACEA) zakłada następujące oznakowanie olejów [5]:
– Klasa A – są to oleje z przeznaczeniem dla aut osobowych mających sil-niki z zapłonem iskrowym. Dodatkowo oznacza się je cyfrą od 1 do 5.
– Klasa B – są to oleje z przeznaczeniem dla aut osobowych i dostawczych mających silniki Diesla o mniejszych pojemnościach. Dodatkowo oznacza się je cyfrą od 1 do 5.
– Klasa C – są to oleje z przeznaczeniem dla aut osobowych mających sil-niki Diesla wyposażone w filtr cząstek stałych. Dodatkowo oznacza się je cyfrą od 1 do 3.
– Klasa E – są to oleje z przeznaczeniem dla aut ciężarowych mających sil-niki Diesla. Dodatkowo oznacza się je cyfrą od 1 do 7.
Przykład oznaczeń zgodnych z ACEA przedstawiono na rysunku 5.8.
Rys. 5.8. Przykład oznaczeń zgodnych z ACEA.

181
Klasyfikacja American Petroleum Institute (API) zakłada następujące oznako-wanie olei [5]:
– Klasa t – oleje do silników dwusuwowych. Dodatkowo oznacza się je kolejnymi literami alfabetu (TA, TB, TC, TD, TE);
– Klasa S – oleje do silników z zapłonem iskrowym. Dodatkowo oznacza się je kolejnymi literami alfabetu (SA, SB, SC, SD, SE, SF, SG, SH, SJ, SL, SM);
– Klasa C – oleje do silników z zapłonem samoczynnym. Dodatkowo ozna-cza się je kolejnymi literami alfabetu, a czasem cyframi (CA, CB, CC, CD, CD-II CE, CF, CF-2, CF-4, CG-4, CH-4, CI-4);
– Klasa GL – oleje do przekładni. Dodatkowo oznacza się je cyframi od 1 do 5 (GL-1, GL-2, GL-3, GL-4, GL-5).
Przykładowe oznaczenia zgodne z API przedstawiono na rysunku 5.9.
Rys. 5.9. Przykład oznaczeń zgodnych z API.
Bezawaryjna praca silników tłokowych jest możliwa tylko przy terminowej wymianie oleju. Na jej częstotliwość mają wpływ następujące czynniki:
– konstrukcja silnika,– warunki klimatyczne,– sposób eksploatacji silnika,– rodzaj i jakość stosowanego paliwa,– inne uwarunkowania.

182
Maziste (plastyczne) środki smarne Smary plastyczne to środki smarne o konsystencji mazistej. Podstawowa,
praktyczna klasyfikacja smarów plastycznych ze względu na przeznaczenie obej-muje następujące grupy [5]:
– smary przeciwcierne (zmniejszające tarcie i współczynnik tarcia),– smary konserwacyjne (służące do przeciwdziałania korozji i rdzewieniu),– smary cierne (zwiększające współczynnik tarcia),– smary przeciwcierno-konserwacyjne,– smary uszczelniające,– smary do specjalnych zastosowań.
Produkowane są one poprzez zagęszczenie oleju. Wybór odpowiedniej fazy ciekłej decyduje o [5]:
– właściwościach smarnych,– zmianach właściwości w zależności od temperatury,– odporności na utlenianie,– właściwościach niskotemperaturowych,– skłonności do odparowywania w podwyższonych temperaturach,– innych.Jako faza ciekła smarów plastycznych najczęściej stosowane są następujące
rodzaje substancji, zwanych olejami bazowymi [5]:– oleje mineralne,– oleje syntetyczne węglowodorowe,– oleje poliglikolowe,– syntetyczne estry,– oleje silikonowe,– tłuszcze roślinne i zwierzęce oraz estry kwasów tłuszczowych i alkoholi
monowodorotlenowych lub wielowodorotlenowych (smary biodegrado-walne),
– etery polifenylowe,– chlorofluorowęglowodory,– inne.Jako zagęszczacze olejów bazowych wykorzystuje się [5]:– mydła,– węglowodory,– woski,– niektóre polimery,– preparowane glinki bentonitowe,– hydrolizowaną krzemionkę,– inne.

183
W skład smarów plastycznych mogą wchodzić także różnego rodzaju dodatki uszlachetniające [5]:
– modyfikatory struktury,– stabilizatory,– inhibitory korozji,– inhibitory utlenienia,– dodatki smarnościowe (AW i EP),– dodatki adhezyjne (zwiększające przyczepność smaru do metali),– barwniki i środki zapachowe,– inne.Smary podzielić można na [5]:– smary węglowodorowe (otrzymuje się przez bezpośrednie rozpuszczenie
węglowodorów stałych w rafinowanych olejach napędowych),– smary zawierające zagęszczacze mydlane:
• smarywapniowe (odporne na działanie wody, temperatura kroplenia około 100ºC),
• smarykompleksowewapniowe (temperatura kroplenia ponad 140oC, wykazują odporności na działanie wody),
• smarykompleksowezawierające sulfanianwapnia (wybitnie wysoka jakość),
• smary sodowe (temperatura kroplenia ponad 120ºC, wykazują brak odporności na działanie wody),
• smarykompleksowesodowe,• smarylitowe (temperatura kroplenia 185ºC, nieodporne na działanie
wody),• smary kompleksowe litowe (temperatura kroplenia 280ºC, nieod-
porne na działanie wody),• smaryglinowe (słaba stabilność mechaniczna, temperatura kroplenia
około 80oC),• smary glinkowe litowe (temperatura kroplenia 240ºC, odporne na
działanie wody),– smary specjalne (otrzymane przez zagęszczenie olejów mineralnych np.
modyfikowanymi bentonitami, pigmentami),– smary syntetyczne (otrzymywane przez zastąpienie olejów z ropy naftowej
olejami syntetycznymi, np. silikonowymi i estrowymi),– smary z zagęszczaczami mieszanymi:
• smary(mydłalitowe+mydławapniowe),• smary(mydłapoliuretany+mydławapniowe),• smary(kompleksyglinowe+bentonity),• smary(tereftalaminiansodu+bentonity),
– smary bentonitowe (wysokie temperatury pracy),

184
– smary krzemionkowe (wysokie temperatury pracy),– smary poliuretanowe (odporne na działanie wody).
Oznaczenia smarów plastycznych zgodne z normą ISO 6743/9:1987 przedsta-wiono w tabeli 5.5.
tabela 5.5. Oznaczenia smarów plastycznych zgodna z normą ISO 6743/9:1987 [5].
oznaczenie Nazwa członu opisISO- Symbol klasyfikacji
Symbole stałe dla smarów plastycznych.-L- Klasa: środki smarne-X- Rodzina: smary
-symbol 1- Najniższa temperatura pracy
A (0°C); B (-20°C); C (-30°C); D (-40°C); E (< -40°C).
-symbol 2- Najwyższa temperatura pracy
A (60°C); B (90°C); C (120°C); D (140°C); E (160°C); F (180°C); G (> 180°C);.
-symbol 3-
Odporność na działanie wody
i ochrona przeciwrdzewna
A – środowisko suche, bez ochrony przed rdzewie-niem.
B – środowisko suche, ochrona przed rdzewieniem w obecności wody słodkiej.
C – środowisko suche, ochrona przed rdzewieniem w obecności wody morskiej.
D – środowisko wilgotne, bez ochrony przed rdze-wieniem.
E – środowisko wilgotne, ochrona przed rdzewie-niem w obecności wody słodkiej.
F – środowisko wilgotne, ochrona przed rdzewie-niem w obecności wody morskiej.
G – wymywanie wodą, bez ochrony przed rdzewie-niem.
H – wymywanie wodą, ochrona przed rdzewieniem w obecności wody słodkiej.
I – wymywanie wodą, ochrona przed rdzewieniem w obecności wody morskiej.
-symbol 4- Odporność na obcią-żenia
A – do zastosowań niewymagających dodatku EPB – do zastosowań wymagających dodatku EP

185
Klasa wg NLGI Konsystencja
Przykładowe oznaczenie smaru wg ISO 6743/9:1987:Klasa ISo-L-XBEGA-2
gdzie:– najniższa temperatura pracy: –20°C,
– najwyższa temperatura pracy: +160°C,– kontakt z wodą: dopuszczalny,
– nie jest wymagana ochrona przed rdzewieniem,– warunki obciążeń: do dużych obciążeń, wymagane właściwości EP,
– klasa konsystencji wg NLGI = 2.
Stałe środki smarneSmarem stałym nazywamy ciała stałe o małych oporach tarcia wewnętrznego
i zewnętrznego. Stosowane są wszędzie tam, gdzie smary plastyczne nie zapew-niają odpowiedniej efektywności lub nie mogą być użyte, np. przy zwiększonej radiacji lub w próżni. Głównymi zaletami smarów stałych jest wysoka tempera-tura eksploatacyjna i odporność chemiczna. Smary stałe stosuje się najczęściej w postaci cienkich powłok smarowych, dodatków do smarów płynnych i plastycz-nych, dodatków przeciwciernych, past i proszków. Smary tego typu nie posiadają zdolności odprowadzania ciepła, a w postaci powłokowej mają ograniczoną trwa-łość [5].
Wyróżnić można następujące typy smarów stałych [5]:– warstwowe (np.: grafit, dwusiarczek molibdenu),– związki organiczne (np.: mydła, woski),– pokrycia chemicznie aktywne (np.: siarczkowe, fosforanowe),– miękkie metale (np.: ołów, cyna),– warstewki polimerowe.

186
5.3. Płyny do układów chłodzenia
Płyn w układzie chłodzenia to medium, które transportuje energię cieplną pomiędzy silnikiem a chłodnicą (około 30% energii cieplnej zawartej w spalonym paliwie).
Płyny do układów chłodzenia pełnią szereg funkcji takich, jak [13]: – wspomaganie w szybkim i równomiernym osiągnięciu i utrzymaniu tem-
peratury roboczej silnika,– ochrona części konstrukcyjnych przed przegrzaniem,– zapobieganie nadmiernemu ogrzaniu mieszanki paliwowo-powietrznej,– zapobieganie przegrzaniu oleju smarującego i związanym z tym zmianom
jego właściwości,– tłumienie hałasu generowanego przez funkcjonujący silnik,– ochrona przed zamarzaniem,– zabezpieczenie przed korozją mimo dużej różnorodności zastosowanych
materiałów i ich połączeń.Płyny chłodzące to mieszanina [13]:– 50-60% wody demineralizowanej lub destylowanej,– 40-50% środka mrozoodpornego (np.: glikol etylenowy lup propylenowy),– dodatków (np.: gorzka sól, antykorozyjnych, stabilizatorów, środków anty-
piennych, neutralizujących jony).Jako dodatki antykorozyjne stosuje się [13].– IAT (Inorganic Additive Technology) – oparte na technologii dodat-
ków związków nieorganicznych (krzemiany i azotyny), które działają synergistycznie, tworząc barierę ochronną. Krzemiany w tej technolo-gii są podatne na wytrącanie. Płyny takie mają krótkie okresy pomiędzy wymianą, które powinny sięgać maksymalnie 2 lat.
– OAT (Organic Acid Technology) – technologia na bazie organicznych kwasów karboksylowych. W przypadku tej technologii płyn tworzy na powierzchni metalu i elementach gumowych cienką warstwę zabezpiecza-jącą. Zalecany do nowszych samochodów, których konstrukcja chłodnicy pozwala na używanie płynów na bazie karboksylowych kwasów organicz-nych.
– HOAT (Hybrid Organic Acid Technology) – jest synergią obu wymienio-nych wcześniej technologii płynów chłodzących. Płyny tego typu mogą być stosowane do wszystkich typów chłodnic samochodów bez względu na wiek i przebieg. Często mają podwyższony okres pomiędzy wymia-nami – tzw. Long Life – bez limitu czasowego i przebiegu.

187
5.4. Płyny do układów hamulcowych
Płyn hamulcowy jest nośnikiem ciśnienia w hydraulicznych układach hamul-cowych. Charakteryzuje go mała ściśliwość oraz odporność na wysokie tempe-ratury. Podstawowym składnikiem płynu hamulcowego są glikole, które odzna-czają się dużą higroskopijnością (chłoną wodę). Z tego powodu konieczna jest okresowa wymiana płynu hamulcowego, gdyż woda w temperaturze przekracza-jącej 100ºC wchodzi w stan wrzenia, co generuje w układzie hamulcowym korki parowe i obniża efektywność hamowania [13].
Nowoczesny płyn hamulcowy powinien się charakteryzować [13]: – wysoką temperaturą wrzenia (szczególnie istotne w systemach bezpie-
czeństwa takich, jak: ESP czy TCS),– małym oporem przepływu płynu w instalacji hydraulicznej pojazdu,– małą absorpcją wody z otoczenia,– płyn nie powinien być agresywny dla gumy czy metalu,– płyn nie powinien się pienić nawet przy intensywnej eksploatacji.Płyn hamulcowy składa się z [13]: – rozpuszczalnika (70% do 80%),– środka smarnego (20% do 30%),– dodatków modyfikujących własności w ilości do kilku %. Aktualnie na rynku dostępne są następujące klasy płynów hamulcowych:– DOT3,– DOT4,– DOT5,– DOT5.1.
Klasy różnią się od siebie właściwościami płynu, przy czym najlepsze własno-ści ma płyn o wyższym numerze po symbolu DOT.
Przyjmuje się, że dwa lata to maksymalny okres eksploatacji płynu hamulco-wego. Po tym okresie należy go bezwzględnie wymienić.
5.5. opony pneumatyczne
Opona pneumatyczna to element koła kontaktujący się z podłożem. Osadzony jest na feldze i ma przekrój otwarty. Wypełniona jest gazem (np. powietrze, argon itp.). Przenosi obciążenia z pojazdu na podłoże. Zapewnia podstawową amortyza-cję w czasie jazdy [4].
W budowie opony wyróżnić można (patrz rys. 5.10) [2, 4]:– czoło – obszar opony, w którym umiejscowiony jest bieżnik,

188
– bok – obszar opony, na którym naniesione są informacje charakteryzujące oponę,
– bark – obszar opony na styku czoła i boku,– bieżnik – element opony odpowiedzialny za jej przyczepność do podłoża,
a także trwałość; w nowoczesnych oponach wyróżnić można następu-jące rodzaje bieżnika: bezkierunkowy, kierunkowy, asymetryczny, asyme-tryczny kierunkowy,
– osnowa – konstrukcyjny szkielet złożony z jednej lub wielu warstw kordu; przeciwdziała siłom rozrywającym oponę wywołanym ciśnieniem wewnętrznym, decyduje o nośności opony,
– opasanie – konstrukcyjne usztywnienie czoła opony; może nie występo-wać w niektórych rodzajach opon diagonalnych; w oponach radialnych skrzyżowanie opasania wynosi od 70° do 85°, zaś diagonalnych skrzyżo-wanie opasania wynosi od 50° do 56°,
– stopka – styka się i przenosi obciążenie z opony na obręcz, umożliwia osadzenie opony,
– drutówka – część stopki wykonana w drutu stalowego, umożliwia trwałe osadzenie opony na obręczy,
– wypełniacz – element wykonany z twardej gumy, zwiększa sztywność boczną opony.
Rys. 5.10. Budowa ogólna opony [2].

189
Rys. 5.11. Podstawowe oznaczenia opon [3].
Właściwa eksploatacja opon wiąże się z przestrzeganiem następujących zasad [2, 4]:1. Opony na jednej osi pojazdu muszą być jednakowej konstrukcji.2. Minimalna głębokość bieżnika to 1.6 mm (autobusy 3mm). 3. Widoczne pęknięcia uwidaczniające osnowę oraz wybrzuszenia na boku lub
czole opony dyskwalifikują oponę z eksploatacji. 4. Nie można montować opon diagonalnych na tylnej osi, jeżeli na przedniej są
zamontowane opony radialne.5. Należy pamiętać o prawidłowym ciśnieniu w ogumieniu (podane w instrukcji
obsługi pojazdu).6. Zdatność opony do użycia wynosi max. 10 lat od daty produkcji.7. Dwie opony mające tę samą rzeźbę bieżnika nie muszą być identyczne, mogą
się różnić budową wewnętrzną.

190
8. Zdatność opony do sprzedaży wg obowiązujących norm wynosi maksymalnie 3 lata od daty produkcji.
9. Przyjęto, że opony letnie na zimowe zmienia się, kiedy temperatura powietrza wynosi 7°C i ma tendencję spadkową. Analogicznie należy postępować, kiedy temperatura wynosi 7°C i rośnie. Wtedy zmieniamy opony zimowe na letnie.
10. Przed rozpoczęciem posezonowego składowania, ogumienie powinno być dokładnie oczyszczone.
11. Temperatura posezonowego przechowywania opon powinna wynosić od -5 do +35°C (optymalnie 10°C).
12. Posezonowe przechowywanie opon powinno być realizowane bez dostępu światła ultrafioletowego, kontaktu z węglowodorami i ozonem, kontaktu z ele-mentami miedzianymi i grzejnymi.Na rysunku 5.6 przedstawiono podstawowe oznaczenia opon.
Literatura
1. Baczewski K., Kołdoński T.: Paliwa do silników o zapłonie iskrowym (samo-czynnym). WKŁ, Warszawa 2004.
2. http://warsztaty.samochodowka.internetdsl.pl/serwishdd/poradnik/opony/opony.htm.
3. http://www.opona.pl/p,oznaczenie-opon.html.4. Jaworski J.: Ogumienie pojazdów samochodowych budowa i eksploatacja.
Wydawnictwo Komunikacji i Łączności. Warszawa 1987.5. Materiały Firmy TOTAL: Przemysłowe środki smarne. Poradnik. Warszawa 2003.6. Merkisz J., Pielecha I.: Alternatywne paliwa i układy napędowe pojazdów. Wyd.
Pol. Pozn., Poznań 2004.7. Maćkowski J.: Wybrane problemy paliw samochodowych. Wyd. Pol. Śląskiej,
Gliwice 2006.8. Maćkowski J.: Paliwa silnikowe. Wyd. PTNŚS, Bielsko Biała 2006.9. Pierzchalska B. i inni: Encyklopedia fizyki. Tom I-III. Państwowe Wydawnic-
two Naukowe. Warszawa 1972.10. Rozporządzenie Ministra Gospodarki z 9 grudnia 2008 r. w sprawie wymagań
jakościowych dla paliw ciekłych (Dz. U. Nr 221, poz. 1441).11. Rozporządzenie Ministra Gospodarki z dnia 12 grudnia 2011 r. zmienia-
jące rozporządzenie w sprawie wymagań jakościowych dla gazu skroplonego (LPG) (Dz. U. z dnia 29 grudnia 2011 r.).
12. Rozporządzenie Ministra Gospodarki z dnia 2 lutego 2012 r. zmieniające rozporządze-nie w sprawie wymagań jakościowych dla paliw ciekłych (Dz. U. z dnia 7 lutego 2012 r.).
13. Zestaw materiałów opracowanych przez Firmy Nissens oraz Castrol.

191
6. Diagnozowanie stanu technicznego maszyn i urządzeń
6.1. Informacje wstępne
Podczas eksploatacji maszyny i urządzenia ulegają procesom fizycznego sta-rzenia czyli zużywania się ich elementów. Jest ono przyczyną z reguły powolnego pogarszania się własności użytkowych urządzenia; może jednak skutkować nagłym przejściem urządzenia ze stanu zdatności w stan niezdatności, często połączony z rozległymi uszkodzeniami innych elementów urządzenia, stano-wiącymi zagrożenie dla zdrowia i życia osób przebywających w jego pobliżu. Procesy te zachodzą na skutek procesów tarcia, korozji, zmęczenia materiału itp. Proces ten powoduje zmianę charakterystyk eksploatacyjnych tych obiektów, zmienia ich wydajność, niezawodność itd., co prowadzi do dezorganizacji pro-cesu eksploatacji. Na ogół trudno jest określić precyzyjnie (wartościować) wpływ poszczególnych czynników powodujących dezorganizację eksploatacji i należy liczyć się z tym, że mimo podobnych warunków eksploatacji procesy starzenia mogą mieć różny przebieg, a stąd wynika konieczność przeprowadzania okreso-wych profilaktycznych kontroli stanu technicznego maszyn i urządzeń [1, 4, 5, 8].
Termin diagnostyka pochodzi z języka greckiego, gdzie >diagnosis< oznacza rozpoznanie, rozróżnianie, osądzanie, a >diagnostike techne< oznacza sztukę roz-różniania, stawiania diagnozy.
Diagnostyka techniczna zajmuje się oceną stanu technicznego maszyny lub urządzenia technicznego poprzez badanie własności procesów roboczych i towa-rzyszących pracy maszyny, a także poprzez badanie własności wytworów maszyny. Diagnoza może dotyczyć:
• ocenystanutechnicznego,• prognozyrozwojulubzmianstanu,• przyczynyrozwojulubzmianstanu.
Podstawowa terminologia z zakresu pojęć stosowanych w diagnostyce tech-nicznej jest zdefiniowana w PN-90/N-04002 „Diagnostyka techniczna. Termino-logia ogólna PN-90 N-04002” (patrz tabela 6.1).

192
tabela 6.1. Diagnostyka techniczna. Terminologia ogólna PN-90 N-04002.
Diagnostyka techniczna –
dziedzina wiedzy obej mująca całokształt zagadnień teo-retycznych i praktycznych związanych z obiektem tech-nicznym, ujmowanym w otocze niu, w jakim on występuje, w celu identyfikacji jego stanu.
Proces diagnozowania – ciąg działań zawierających badania i wnioskowanie dia-gnostyczne w celu sformułowania diagnozy.
Diagnoza techniczna – rezultat procesu diagnozowania, zawierający określenie stanu technicznego obiektu diagnozowania.
Symptom diagnostyczny – informacja pozwalająca wnioskować o właściwościach obiektu technicznego.
Sygnał diagnostyczny – sygnał generowany przez badany obiekt techniczny, wyko-rzystywany w diagnozowaniu.
Model obiektu diagnozowa-nia –
sformalizowany opis obiektu technicznego, niezbędny do diagnozowania.
Stan zdatności obiektu dia-gnozowania –
stan techniczny, w którym obiekt może zrealizować zada-nie zgodnie z wymaganiami, przy określonym oddziały-waniu otoczenia.
Stan niezdatności obiektu diagnozowania –
stan techniczny, w którym obiekt nie może zrealizować zadania zgodnie z wymaganiami, przy określonym oddzia-ływaniu otoczenia.
Relacja diagnostyczna – relacja przyporządkowująca symptomowi cechę lub cechy stanu (stanów) obiektu technicznego,
Badanie diagnostyczne –pomiar wielkości opisujących symptomy lub organolep-tyczne badanie zjawisk zawie rających określone symp-tomy oraz rejestracja wyników.
Wnioskowanie diagnostyczne –
przetwarzanie wyników badania diagnostycznego oraz innych informacji o obiekcie technicznym i jego otoczeniu na diagnozę.
Diagnozowanie techniczne – badanie i wnioskowanie diagnostyczne.
Do prawidłowej oceny stanu technicznego obiektu niezbędna jest zawsze wie-dza: I o obiekcie badań,II o sygnałach i symptomach,III z teorii decyzji, w zakresie wnioskowania diagnostycznego.
I. Wiedza o obiekcie diagnozowania obejmuje problematykę z dziedziny pro-jektowania, wytwarzania i eksploatacji obiektu. Dotyczy ona również fizyki uszko-dzeń: ich możliwych przyczyn, rodzajów, szybkości rozwijania się (tabela 6.2).

193
tabela 6.2. Przyczyny powstawania uszkodzeń wg różnych kryteriów.
Przyczyny powstawania uszkodzeń (wg fazy życia obiektu):
• konstrukcyjne/projektowe: uszkodzenia powstałe wsku-tek błędów projektowania i konstruowania obiektu, naj-częściej przy nieuwzględnieniu obciążeń ekstremalnych, tzn. wartości, które w istotny sposób przekraczają obcią-żenia nominalne, prowadząc wprost do uszkodzeń;
• produkcyjne (technologiczne) i materiałowe: uszkodze-nia powstałe wskutek błędów i niedokładności procesów technologicznych (brak tolerancji wymiarów, gładkości powierzchni, obróbki termicznej itp.) lub wad materiałów elementów obiektu;
• montażowe:powstałenaskutekniewłaściwegomontażu;• eksploatacyjne: uszkodzenia powstałe w wyniku
nieprzestrzega nia obowiązujących zasad eksploatacji lub na skutek oddziaływań czyn ników zewnętrznych nieprze-widzianych dla warunków użytkowania danego obiektu, co prowadzi do osłabienia i przedwczesnego zużycia i osiągnięcia stanu granicznego;
• starzeniowe: zawsze towarzyszące eksploatacji obiektówi będące rezultatem nieodwracalnych zmian, prowadzą-cych do pogorszenia wytrzymałości i zdolności współ-działania poszczególnych elementów.
Przyczyny powstawania uszkodzeń (wg dominują-cej energii):
• mechaniczne(naprężeniastatyczne,pełzanie,zmęczenie,pitting, zużycie cierne),
• chemiczne(korozjametali,starzeniegumy,farby),• elektryczne–elektrokorozja,• cieplne(nadtapianie,przegrzanie).
Sposoby uszkadzania się maszyn w toku eksplo-atacji
• wskutek powolnych, nieodwracalnych procesów sta-rzeniowych i zużyciowych, zachodzących w maszynie (rys. 6.1 a);
• wwynikupojawieniasięprocesówodwracalnychoróżnejintensywności przebiegu, wywołanych czasowym prze-kroczeniem dopuszczalnych wartości czynnika wymusza-jącego(rys. 6.1 b);
• wsposóbskokowy,objawiającysięnieciągłymprzejściemjednej lub więcej cech poza granice przyjęte za niedo-puszczalne (rys. 6.1 c).

194
Rys. 6.1. Sposoby uszkadzania się maszyn w toku eksploatacji (opis w tabeli 6.2), gdzie: c – wartość przyjętej cechy charakteryzującej stan techniczny obiektu technicznego.
II. Wiedza o sygnałach i symptomach świadczących o stanie diagnozowanego obiektu dotyczy zarówno znajomości sposobu generacji tych sygnałów, jak i ich akwizycji oraz przetwarzania.
III. Teoria decyzji w zakresie wnioskowania diagnostycznego obejmuje pro-blematykę podejmowania decyzji diagnostycznych w warunkach niepewności i ryzyka. Jak wiadomo, w diagnostyce, ze względu na zakłócenia, wszelkie decyzje podejmowane są w kategoriach prawdopodobieństw. Stąd modele diagnostyczne obiektów, czyli „związki między obserwowanymi symptomami a cechami stanu” są mniej lub bardziej probabilistyczne.
W inżynierii mechanicznej, w budowie i eksploatacji maszyn czynnikiem sty-mulującym bezpośrednio rozwój diagnostyki jest odpowiedzialność funkcji reali-zowanej przez maszynę, w tym szczególnie minimalizacja następujących zagro-żeń:
– zagrożeń zdrowia i życia ludzkiego,– zagrożeń środowiska biologicznego i technicznego,– zagrożeń wartości ekonomicznych (w tym i jakości).
Ogólny model obiektu dla potrzeb diagnostyki technicznej przedstawia rys. 6.2 [8, 10]. Stan techniczny obiektu można określać, obserwując funkcjono-wanie obiektu w kategoriach:
• badania jakościwytworuobiektu technicznego,np.pomiary gabarytów,pasowania, chropowatość powierzchni (ogólnie im lepszy stan techniczny maszyny, tym lepsza jakość wytwarzanych produktów),
• obserwacjiprocesówroboczych,monitorującichparametrywsposóbcią-gły lub okresowy,
• obserwacji procesów resztkowych, które, będąc cennym źródłem infor-macji diagnostycznej, oddziaływają jednocześnie destrukcyjnie na obiekt.
Przykłady parametrów charakteryzujących proces roboczy przedstawiono w tabeli 6.3, a procesy resztkowe w tabeli 6.4.

195
Rys. 6.2. Ogólny model obiektu dla potrzeb diagnostyki technicznej.
tabela 6.3. Przykłady parametrów charakteryzujących proces roboczy [3. 7].
Proces roboczy Parametr procesu roboczegoPrzetwarzanie energii chemicznej w ciepło--pracę mechaniczną.
Podciśnienie, parametry pulsacji ciśnienia, ciśnienie sprę-żania, maksymalne ciśnienie spalania, temperatura spala-nia, szybkość narastania ciśnienia, temperatura spalania, współczynnik nadmiaru powietrza, skład spalin, prędkość obrotowa, moc efektywna, moment obrotowy, moment strat wewnętrznych, jednostkowe zużycie paliwa, godzinowe zużycie paliwa i inne.
Przetwarzanie energii w energię elektryczną.
Gęstość elektrolitu, napięcie, wskaźnik samo-wyładowania, czas wyładowania, rezystancja wewnętrzna, sprawność, rezy-stancja uzwojeń i izolacji, spadek napięcia, napięcie i natęże-nie prądu, czas osiągnięcia wartości prądu ustalonego, stała czasowa, napięcie na okładzinach kondensatora, rezystancja kondensatora.
Przetwarzanie ener-gii elektrycznej w pracę mechaniczną.
Spadki napięć, natężenie poboru prądu, moment obrotowy, moc, prędkość obrotowa, napięcie i inne.
Przetwarzanie energii kinetycznej w ciepło.
Droga hamowania, siła hamowania, czas uruchomienia hamulców, opóźnienie hamowania, kątowe opóźnienie hamowania.
Przenoszenie energii. Współczynnik poślizgu, moment (moc) na wyjściu, moment strat, sprawność mechaniczna, siła napędowa i inne.

196
tabela 6.4. Przykłady parametrów charakteryzujących proces resztkowy.
Proces resztkowy Parametr procesu resztkowego
Termiczne Temperatura, zmiany temperatury, przebieg czasowy tem-peratury, obrazy rozkładu temperatury, czas nagrzewania się zespołów i inne.
Elektryczne, generowane przy tarciu
Chwilowa różnica potencjałów elektrycznych, czas trwania impulsów, częstotliwość, amplituda i inne.
Starzenia środków smar-nych
Lepkość, zmiana lepkości, temperatura krzepnięcia, tem-peratura zapłonu, gęstość, indeks wiskozy, indukcyjność, poziom koncentracji produktów zużycia: Fe, Al, Pb, Cu i inne.
Wibroakustyczne • Miarywdziedzinieamplitud:wartośćśrednia,skuteczna,współczynnik kształtu, szczytu, impulsowości, funkcja gęstości prawdopodobieństwa i inne.
• Miary w dziedzinie częstotliwości: gęstość widmowamocy, częstotliwość Rice’a, współczynnik harmoniczności i inne.
• Miarywdziedzinieczasu:funkcjakorelacji,unormowanafunkcja korelacji, czas korelacji i inne.
6.2. Ważniejsze metody badań stanu maszyn
Metody badania stanu technicznego maszyn i urządzeń technicznych można podzielić na dwie kategorie:1. Metody symulacyjne, które dla uzyskania oceny wymagają specjalnego bodźca
– stymulatora, np. źródła światła, fali ultradźwiękowej, pola magnetycznego, promieniowania rentgenowskiego itp. Metody te, zwane nieniszczącymi (ang. NDT = non destructive testing), w większości można stosować jedynie do oddzielnych elementów maszyn i konstrukcji.
2. Bazujące na obserwacji procesów resztkowych, towarzyszących funkcjonowa-niu maszyn. Najprostszy rodzaj tych badań diagnostycznych to analiza pro-duktów zużycia zawartych w olejach smarnych lub hydraulicznych. Ważniejsze metody badań stanu maszyn, konstrukcji i ich elementów przed-
stawiono w tabeli 6.5 [1, 2].
6.2.1. Metody wizualneLupa – przyrząd optyczny, służący do oglądania powiększonych obrazów bli-
sko położonych przedmiotów. Są wyposażone w soczewki lub zestawy soczewek

197
skupiających, umożliwiających uzyskanie powiększeń do 20x. Mogą być wyposa-żone w integralne oświetlacze, podziałki, naniesione wzorce wad itd.
tabela 6.5. Ważniejsze metody badań stanu maszyn, konstrukcji i ich elementów.
Nazwa metody Istota obszar zastosowania ograniczenia
Metody wizualne – endoskopowe, holograficzne, penetracyjne barwne lub fluore-scencyjne.
Ogląd optyczny przez układ soczewek lub włókno świa-tłowodu, rekonstrukcja frontu falowego z 3-wymia-rowego obrazu dyfrakcyj-nego, wnikanie w wady widzialnych lub fluoryzują-cych chemikaliów.
Nieruchome elementy maszyn i kon-strukcji.
Tylko wady powierzchniowe, konieczny bezpo-średni dostęp, wady rzędu milimetrów.
Magnetyczne – proszkowe, wiroprądowe
Koncentracja ferro proszku w okolicach wad i uszko-dzeń, zmiana amplitudy i fazy prądu w okolicy wad.
Jw. z ferro materiałów, z materiałów przewodzą-cych.
Wady rzędu mili-metrów.
Metody radiogra-ficzne – rentge-nowskie, izoto-powe, neutronowe.
Tłumienie, odbicie, rozpro-szenie wnikającej radiacji lub strumienia neutronów.
Nieruchome elementy maszyn i kon-strukcji.
Drogie i ciężkie oprzyrządowanie, konieczny bez-pieczny dostęp. Wady objętościowe, rzędu milimetrów.
Metody ultradźwiękowe
Tłumienie, rozproszenie, odbicie, zmiana fazy, rezo-nansu, padającej fali aku-stycznej.
jw. Konieczny bezpo-średni kontakt.
Emisja akustyczna Wymuszony rozwój mikro-uszkodzeń (np. polem naprężeń) jest źródłem emi-sji akustycznej – fal tran-sientowych o wysokiej czę-stotliwości.
jw. Drogie oprzyrzą-dowanie, mało doświadczeń.

198
Badania produk-tów zużycia – wkłady filtracyjne, korki magne-tyczne, ferrografia, analiza spektralna oleju, zliczanie cząstek
Olej smarny (ciecz robo-cza odfiltrowana, odwiro-wana) daje produkty zuży-cia do badań ilościowych, przechwytywanie dużych magnetycznych cząstek zużycia w oleju (cieczy roboczej), analiza spektro-graficzna małych cząstek po spaleniu, bieżące zliczanie cząstek w układzie smaro-wania (hydrauliki).
Maszyny w ruchu, po pobraniu próbki oleju (cieczy).
Trudności w lokali-zacji uszkodzeń.
Diagnostyka ter-miczna – termo-grafia, termome-tria
Analiza obrazu obiektu w podczerwieni, punktowy pomiar temperatury.
Nagrzewające się nieruchome elementy maszyn, łoży-ska, kadłuby maszyn ener-getycznych.
Konieczny dostęp bezpośredni, trud-ności w instalacji, duża bezwładność.
Pulsacja medium Analiza pulsacji medium w przestrzeniach roboczych maszyn.
Podzespoły maszyn prze-pływowych (silniki spali-nowe, pompy itp.)
Trudny dostęp, drogie oprzyrządo-wanie.
Diagnostyka wibroakustyczna – drgania, hałas
Analiza drgań i hałasu zwią-zanych z funkcjonowaniem maszyny.
Maszyny w ruchu. Moż-liwość badań bezkontakto-wych.
BRAK ISTOTNYCHOGRANICZEŃ
Mikroskopy – w badaniach wizualnych najczęściej stosuje się tzw. mikro-skopy piórowe, umożliwiające uzyskiwanie powiększeń do 50x. Mikroskopy te, podobnie jak lupy, mogą mieć wbudowane integralne oświetlenie. Zastosowanie tego typu mikroskopów jest na ogół ograniczone do badania miejsc z już wykrytą wadą powierzchni.
Endoskopy – ze względu na budowę endoskopy dzielą się na endoskopy sztywne (boroskopy) oraz giętkie (fiberoskopy). Cechą charakterystyczną jest sztywna lub elastyczna budowa elementu stanowiącego obudowę dla układu soczewek, pryzmatów i wiązki światłowodów służących do przesyłania obrazu. Zgodnie z przytoczoną klasyfikacją budowy boroskopy mają obudowę sondy wykonaną w postaci metalowego pręta, natomiast fiberoskopy do przesyłania

199
obrazu widzianego przez obiektyw sondy wykorzystują elastyczną wiązkę świa-tłowodów.
6.2.2. Metody penetracyjneW metodzie tej ciecz (penetrant) zawierająca cząsteczki barwnika wnika do
pęknięć (nieciągłości) konstrukcji, a wywoływacz (proszek) umieszcza barwnik na powierzchni nieciągłości, aby był lepiej widoczny. Obserwacja odbywa się albo bezpośrednio (kolorowa zawiesina), albo w świetle UV (fluorescencja).
6.2.3. Metody magnetyczno-proszkoweMetody wykorzystują zjawisko rozproszenia pola magnetycznego lub zmiany
przenikalności magnetycznej w miejscach występowania wad. W czasie badania na powierzchnię obiektu nanosi się podczas magnesowania drobnoziarnisty pro-szek magnetyczny. Jeśli w badanym elemencie nie ma wad, to linie sił pola magne-tycznego zobrazowane usytuowaniem ziaren proszku będą układać się bez zmiany kierunku. Natomiast będą odchylać się w miejscu z wadą (zjawisko rozproszenia pola magnetycznego).
6.2.4. Metody radiacyjneW metodach tych wykorzystuje się zjawiska towarzyszące promieniowaniu
jonizującemu, a przede wszystkim zjawisko fotochemiczne. Promieniowanie joni-zujące posiada zdolność przenikania przez różne materiały oraz zdolność naświe-tlania błony fotograficznej. Ilość promieniowania przenikającego przez materiał zmienia się dla różnych materiałów wraz ze zmianą ich gęstości, a dla tych samych materiałów zależnie od ich grubości lub obecności wad. Stosuje się promienio-wanie rentgenowskie – X (radiografia) lub promieniowanie gamma – γ (gamma-grafia). Na wywołanej błonie otrzymuje się dwuwymiarowy, płaski obraz, będący rzutem badanego obiektu lub jego fragmentu.
6.2.5. Metody ultradźwiękoweBadania ultradźwiękowe wykorzystują zjawiska towarzyszące rozchodzeniu
się fal o częstotliwości ultradźwiękowej, tzn. większej od górnej granicy słyszal-ności ucha ludzkiego (ponad 20 000 Hz). Ultradźwięki znalazły szczególne zasto-sowanie w badaniach nieniszczących, podczas których wykorzystuje się wpływ własności sprężystych i jednorodności struktury materiału na rozchodzenie się fal ultradźwiękowych. Badania ultradźwiękowe opierają się na obserwacji natęże-nia i zmian kierunku fal ultradźwiękowych w badanym materiale oraz na pomia-rach czasu przejścia fal przez materiał. Polegają na wprowadzeniu do badanych obiektów fal ultradźwiękowych oraz detekcji tych fal po ich przejściu przez ten

200
obiekt. Informacje o wadach w obiekcie zawierają się w parametrach sygnału wychodzącego z obiektu, np. jego amplitudzie lub fazie. Badania ultradźwiękowe umożliwiają przede wszystkim wykrywanie wewnętrznych nieciągłości obiektów. W ten sposób można badać wszelkiego rodzaju materiały, tj. metale, ciecze i gazy. Wymienione metody znajdują szczególnie zastosowanie między innymi do bada-nia złączy spawanych, materiałów hutniczych, części maszyn, pomiarów grubości i innych.
6.2.6. Diagnostyka termograficznaJest to metoda diagnostyczna oparta o pomiary termowizyjne, gdzie uzyskuje
się obraz pola temperaturowego badanego obiektu z rozdzielczością do 0,1°C. Urządzenia do prowadzenia pomiarów termowizyjnych wykorzystują zjawisko promieniowania podczerwonego. Każde ciało o temperaturze powyżej -273°C emituje energię w postaci promieniowania elektromagnetycznego. Możliwości zastosowania metod termowizyjnych (rys. 6.4): • maszyny elektryczne (transformatory, generatory, silniki), stacje rozdzielcze
wysokiego i niskiego napięcia (łączniki, przekładniki itp), linie przesyłowe i trakcyjne,
• urządzenia energetyczne (kotły, turbozespoły, wymienniki ciepła), badaniastanu izolacji termicznej rurociągów,
• badaniaszczelnościnp.kominów,• ocenajakościwykonaniaizolacjiiujawnianiemostkówtermicznychbudyn-
ków i hal przemysłowych,• badanieszczelnościinstalacjiciśnieniowych,• wykrywaniesamozapłonówhałdwęglowych,• kontrolajakościwykonywanychusługprzezfirmyobce.
Uszkodzona izolacja cieplna rurociągu – przegląd okresowy.

201
Budynek osiedlowy w trakcie ocieplania
Rys. 6.4. Możliwości zastosowania metod termowizyjnych (źródło: http://www.powerau-diting.com/diagnostyka-termograficzna).
6.2.7. Badania produktów zużyciaPrzedmiotem zainteresowania tych metod jest ciągła lub okresowa obserwa-
cja: • wtrąceń wynikających z procesu i technologii, np. odpryski spawalnicze,
ścierniwo, wióry,• produktów zużycia i starzenia urządzenia – cząsteczek ze zużywających się
powierzchni współpracujących,• produktówzużyciacieczyroboczej–np.produktyutlenianiacieczyroboczej,• zanieczyszczeń,któresąwynikiemreakcjimieszaniacieczyroboczejzinnymi
substancjami: wodą, smarami i środkami p/korozyjnymi.
Analiz dokonuje się poprzez wizualną ocenę czystości oleju, obserwacje pod mikroskopem, pomiary lepkości kinematycznej, spektralną analizę emisyjną (metoda, która wykorzystuje zjawisko emisji promieniowania przez odpowiednio wzbudzone pierwiastki metali), metodę absorpcji atomowej (pomiar charaktery-stycznego dla danego pierwiastka stopnia pochłaniania wiązki promieniowania). Badania i analizy produktów zużycia umożliwiają odpowiedzi na pytania, skąd pochodzi zużycie, co je powoduje, jak zaawansowane jest zużycie oraz jak szybko postępuje.
6.2.8. Diagnostyka wibroakustyczna (WA)Jak wynika z rysunku 6.2, odpowiedzią maszyny na wejście energetyczne
(zasilania, sterowania, zakłócenia) jest na wyjściu cała gama procesów resztko-wych, w tym również i wibroakustycznych. Energia, dostarczona na wejście maszyny, przekształcona jest na ruch podstawowy – użyteczny technologicznie,

202
np. ruch obrotowy (silniki elektryczne, pompy itp.) lub posuwisto-zwrotny (sil-niki tłokowe, prasy itp.). Te z kolei mogą powodować ruchy towarzyszące lub ina-czej zjawiska dynamiczne takie, jak drgania, hałas, pulsacje medium, emisja aku-styczna (procesy wibroakustyczna), które są procesami zbędnymi z punktu widze-nia celu realizowanego przez maszynę (oczywiście pomijając maszyny, których istotą jest ruch drgający, np. zagęszczarki). Trzeba zauważyć, że generacja drgań i hałasu oraz pulsacji nie zawsze świadczy o wadliwym funkcjonowaniu (złym sta-nie technicznym) maszyny i często należy zaakceptować pewien poziom drgań jako znamionowy, wynikający z konstrukcji maszyny (np. sprężarka tłokowa).
W diagnostyce wibroakustycznej istotna jest zatem nie sama generacja proce-sów WA w ogóle, lecz odchylenia tych zjawisk w poziomie i charakterze generacji od wzorca maszyny zdatnej.
6.2.8.1. Najczęstsze przyczyny drgań maszyn
Niewyrównoważenie – cecha wszystkich elementów wirujących, zarówno wałów maszyn wirnikowych, jak i wałów wykorbionych maszyn tłokowych. W pierwszym jednak przypadku niewyrównoważenie jest ubocznym efektem wady materiałowej lub wytwórczej, a także efektem zużycia eksploatacyjnego (np. erozja). W drugim przypadku niewyrównoważenie wału korbowego jest charak-terystyką maszyny, dobrane świadomie przez konstruktora, niezmienne w proce-sie eksploatacji.
Rozróżniamy trzy podstawowe typy niewyważenia elementu wirującego:• niewyważeniestatyczne(rys.6.5a)–stanniewyważenia,przyktórymoświr-
nika i jego centralna główna oś bezwładności są równoległe,• momentowe(rys.6.5b)–stanniewyważenia,przyktórymoświrnikai jego
centralna główna oś bezwładności przecinają się w środku ciężkości wirnika,• dynamiczne (rys.6.5c)– stanniewyważenia,przyktórymoświrnika i jego
centralna główna oś bezwładności są skośne.
Rys. 6.5. Różne rodzaje niewyważeń (http://www.4metal.pl).

203
Wyważanie – operacja wyznaczania wartości i kątów niewyważenia oraz jego zmniejszania za pomocą korekcji mas wirnika. Ogólnie każde niezrównoważe-nie mas w ruchu obrotowym jest źródłem wirujących sił i/lub momentów sił bez-władności, które przenoszą się przez łożyska na korpus, wzbudzają cały układ do drgań. Pomiar amplitudy i fazy tych drgań pozwala sądzić o rodzaju niewyrówno-ważenia.
Nieosiowość wałów oraz luzy w posadowieniu – zespół napędowy maszyny i jej organ roboczy są na ogół konstrukcyjnie rozdzielne i połączone końców-kami wałów. Połączenie to często nie jest jednak współosiowe i generalnie można wyróżnić trzy typy rozosiowania wałów: promieniowe, kątowe i skośne, powstałe jako wynik błędów wytwórczych i montażowych. Amplituda tych drgań zależy wprost proporcjonalnie od przesunięcia promieniowego i kątowego. Istotę gene-racji sygnału drganiowego w przypadku luzów w posadowieniu maszyny ilustruje rysunek 6.6. Czarny punkt oznacza wirującą siłę odśrodkową, powodującą podry-wanie i opadanie łap silnika i cykliczne uderzenia o łby śrub kotwiących i podłoże (fundament).
Rys. 6.6. Generacja sygnału drganiowego w przypadku luzów w posadowieniu maszyn (źródło: materiały Bruel and Kjaer, Machine Condition Monitoring using Vibration Ana-lysis).
Drgania generowane przez łożyska – głównym zadaniem łożysk jest bez-pieczne przeniesienie obciążeń roboczych z elementu wirującego na korpus przy małych oporach ruchu i dobrym pozycjonowaniu wirującego elementu robo-czego. Ze względu na kinematykę elementu łożyska dzielimy na ślizgowe i toczne. Najważniejsze powody generacji drgań w łożyskach tocznych to: konstrukcyjne, wytwórcze i eksploatacyjne. Konstrukcyjne przyczyny drgań wynikają z istoty pracy łożyska tocznego, czyli periodycznie zmiennej liczby elementów tocznych

204
w przyporze. Przyczyny wytwórcze związane są z obecnością odchyłek kształtu i wymiaru oraz błędów produkcyjno-montażowych. Wreszcie eksploatacyjne przyczyny drgań wynikają z procesów zużycia, ciernego i zmęczeniowego, które pogłębiają generalnie istniejące odchyłki kształtu i wymiaru, i tworzą nowe błędy punktowe i powierzchniowe (pitting) na bieżniach i elementach tocznych łożyska.
Drgania generowane przez przekładnie zębate – w konstrukcjach maszyno-wych bardzo często istnieje potrzeba zmiany prędkości obrotowej lub momentu napędowego na drodze silnik-maszyna robocza. W większości przypadków sto-suje się wtedy przekładnie zębate, zwłaszcza jeśli chodzi o przekazywanie dużych mocy. Przekładnie, z racji dyskretnego przenoszenia obciążenia, przez kolejne zęby wchodzące w przypór należą, obok łożysk tocznych, do istotnych źródeł (generatorów) drgań. Tutaj okresowo zmienna liczba zębów w przyporze jest przyczyną okresowej fluktuacji sztywności zazębienia, co jest powodem powsta-nia drgań o częstotliwościach równych iloczynowi prędkości obrotowej danego wału i liczby zębów koła zębatego na tym wale. Struktura drgań przekładni jest bardzo złożona, zwłaszcza że dochodzą do tego efekty drganiowe błędów produk-cyjnych i montażowych.
6.2.8.2. Analiza drgań
Drgania traktujemy jako oscylacyjny ruch cząstki lub ciała względem punktu odniesienia. Ilość pełnych okresów drgań zachodzących w ciągu jednej sekundy nazywamy częstotliwością i mierzymy w Hertzach (Hz). Ruch wibracyjny może składać się z jednej składowej o określonej częstotliwości, jak np. drgania kamer-tonu, lub z kilku składowych o różnych częstotliwościach, jak np. ruch tłoka w sil-niku spalinowym. W praktyce wibracje są złożonymi ruchami periodycznymi, składającymi się z wielu podstawowych przebiegów sinusoidalnych. Dlatego też wykres amplitudy w funkcji czasu nie jest wystarczający dla określenia ilości, cha-rakteru i częstotliwości składowych. Dopiero wykreślenie amplitudy w funkcji częstotliwości pozwala stwierdzić, jak powstało drganie złożone. Rozkładanie zło-żonych sygnałów wibracji na drgania składowe i znajdowanie składników często-tliwości nazywane jest analizą częstotliwości i jest podstawą pomiarów diagno-stycznych drgań. Wykres amplitudy w funkcji częstotliwości nazywany jest wid-mem amplitudowym Wykonując analizę częstotliwościową drgań maszyny, mamy najczęściej do czynienia z kilkoma wyróżniającymi się składnikami częstotliwości, które są związane z ruchem różnych części maszyny (rys. 6.7).

205
Rys. 6.7. Widmo drgań hipotetycznej maszyny z zaznaczeniem charakterystycznych pasm dla różnych grup uszkodzeń [Cempel, 1985].
Do ilościowego opisu drgań używa się wielkości, zwanej amplitudą. Wiel-kość tę można określić w różny sposób. Na rysunku 6.8 przedstawiono zależność pomiędzy wartością szczytową, średnią, średnią wartością skuteczną (RMS) oraz wartością szczyt-szczyt dla przebiegu sinusoidalnego o okresie T.
Rys. 6.8. Zależności pomiędzy wartością szczytową, średnią, RMS oraz wartością szczyt--szczyt dla przebiegów sinusoidalnych. Źródło: Wibracje i wstrząsy, opracowanie firmy Bruel&Kjaer.
Na rysunku 6.9 przedstawiono klasyfikację drgań ze względu na ich możliwe skutki dla maszyny.

206
Rys. 6.9. Klasyfikacja drgań ze względu na ich możliwe skutki dla maszyny [2].
Niewątpliwą zaletą metod wibroakustycznych jest to, że uzyskuje się w tym przypadku dużą ilość informacji o obiekcie bez konieczności jego wyłączania z ruchu. Możliwa jest nie tylko ogólna ocena stanu technicznego, ale również lokalizacja uszkodzonych podzespołów czy typów uszkodzeń, np. niewyważenia, nieosiowości, pęknięcia czy uszkodzenia łożyska łożysk. Diagnostyka wibroaku-styczna umożliwia również ciągły monitoring stanu technicznego, dzięki czemu możliwa jest detekcja uszkodzeń we wczesnej fazie ich rozwoju i prognozowanie zachowania maszyny. Do tego celu niezbędna jest jednak prawidłowo zbudowana procedura diagnostyczna, która odpowiada na następujące pytania:
DobryDuże ciężkie maszyny, pracujące prze predkościach przewyższającychczęstość dragań fundamentu
DobryDuże ciężkie na sztywnym i cięzkim fundamencie, którego częstość włosna przewyższa prędkość obr. Maszyny
Dobry-Maszyny średniej klasy 15 do 76kWAlbo do 3 00 kW na specjalnych fundamentach
Dobry-Małe maszyny do 15 kW
Dopuszczalny
Dopuszczalny
Dopuszczalny
Dopuszczalny
Zadawalający
Zadawalający
Zadawalający
Zadawalający
Grupa K Grupa M Grupa G Grupa T
NiedopuszczalnyNiedopuszczalny
mm S45
V
29
18
11,2
7,1
4,5
2,8
1,8
1,12
0,71
0,45
0,18
8dB
8dB
75dB
8 dB
Niedopuszczalny
Niedopuszczalny

207
1. Co mierzyć? (Jaki proces? Dlaczego ten? W którym miejscu?),2. Jak mierzyć? (Sposób akwizycji sygnału. Jakie parametry procesu? Jakie cechy
stanu? Jak często?),3. Czym mierzyć? (Oprzyrządowanie, przygotowanie sygnału, sposób przetwa-
rzania.),4. Jak wnioskować? (Modele, stany graniczne, decyzje.).
Literatura
1. Będkowski L.: Elementy diagnostyki technicznej, Wojskowa Akademia Tech-niczna, Warszawa 1991.
2. Cempel Cz.: Podstawy wibroakustycznej diagnostyki maszyn, WNT Warszawa 1982.
3. Cempel Cz.: Wibroakustyka stosowana, PWN, Warszawa 1989.4. Michalski R. (red.): Diagnostyka maszyn roboczych. ITE. Radom 2004.5. Niziński S., Michalski R.: Diagnostyka obiektów technicznych. Wydawnictwo
Instytutu Eksploatacji. Warszawa-Sulejówek-Olsztyn-Radom 2002. ISBN 83-7204-290-X.
6. Niziński S., Pelc H.: Diagnostyka urządzeń mechanicznych. Eksploatacja, WNT, Warszawa 1980.
7. red. Cempel Cz., Tomaszewski F.: Diagnostyka maszyn. Zasady ogólne. Przy-kłady zastosowań, Międzyresortowe Centrum Naukowe Eksploatacji Majątku Trwałego, Radom 1992.
8. Żółtowski B., Cempel C. (red.): Inżynieria Diagnostyki Maszyn, praca zbio-rowa., PTDT ITE PIB Radom, Warszawa, Bydgoszcz, Radom 2004.
9. Żółtowski B., Ćwik Z.: Leksykon diagnostyki technicznej, Wydawnictwo Uczel-niane Akademii Techniczno-Rolniczej w Bydgoszczy, Bydgoszcz 1996.
10. Żółtowski B.: Podstawy diagnostyki maszyn, Wydawnictwo Uczelniane Aka-demii Techniczno-Rolniczej w Bydgoszczy, Bydgoszcz 1996.
http://www.4metal.plhttp://www.powerauditing.com/diagnostyka-termograficzna/PN-90/N-04002 „Diagnostyka techniczna Terminologia ogólna PN-90 N-04002materiały Bruel and Kjaer, Machine Condition Monitoring using Vibration Ana-
lysis.


209
7. technologia napraw
7.1. Wprowadzenie i podstawowe definicje
W nowoczesnym podejściu do zagadnień eksploatacyjnych naprawy trakto-wane są jako element działań systemu utrzymania obiektów technicznych. W star-szych opracowaniach można znaleźć umiejscowienie napraw jako element sys-temu obsługiwania. Wydaje się, że w chwili obecnej to pierwsze podejście bar-dziej odpowiada gospodarce rynkowej, gdzie naprawy postrzegane są jako usługi na rzecz systemu użytkowania (np. produkcyjnego, transportowego) obiektów technicznych. Zatem naprawy nie mogą być traktowane tylko jako rodzaj obsługi technicznej, której celem jest przywrócenie stanu zdatności obiektu technicznego, ale również muszą być brane pod uwagę inne aspekty utrzymania maszyn, np.: działania logistyczne, prawne, ekonomiczne, traktowanie działu produkcyjnego jako klienta wewnętrznego. Powyższe założenia prowadzą do następujących defi-nicji [2]:
Naprawa – to działanie, którego celem jest przywrócenie wartości użytko-wej (funkcjonalności, sprawności techniczno-ekonomicznej) obiektu (maszyny, urządzenia, pojazdu). Racjonalna gospodarka remontowa ma za zadanie nie tylko wykonywanie naprawy, ale również niedopuszczanie do uszkodzenia awaryjnego obiektu, np. poprzez stosowanie systemu utrzymania planowo-zapobiegawczego lub wg stanu (rozdział 2) [7].
Proces technologiczny naprawy – to zbiór operacji technologicznych, wyko-nywanych w określonej kolejności przez odpowiednio przygotowanych pracowni-ków, na odpowiednio wyposażonych stanowiskach roboczych, w celu przywróce-nia stanu zdatności obiektu technicznego [2].
operacja technologiczna – to część procesu technologicznego, stanowiąca zbiór czynności technologicznych wykonywanych na jednym stanowisku przez jednego pracownika lub jedną grupę pracowników, bez przerw operacyjnych. Operacja jest podstawową jednostką procesu podlegającą normowaniu, tzn. usta-leniu pracochłonności, kosztów, a w metodzie potokowej – organizacji pracy, rytmu i taktu pracy.
Złożone operacje technologiczne dzieli się na zabiegi i czynności [2].Zabieg – to część operacji wykonywana przy jednym lub kilu elementach
przedmiotu w określonej pozycji ustawczej. Przy demontażu może to być np. roz-luźnienie połączeń części, demontaż osłony.
Czynność – to każda działalność technologiczna pracownika dająca określony efekt, np. ustawienie przedmiotu do montażu, sprawdzenie wymiarów, wyjęcie skrzyni przekładniowej z pojazdu.

210
technologia naprawy jest to zbiór technicznie, ekonomicznie oraz pod względem bezpieczeństwa uzasadnionych metod i środków realizacji procesu technologicznego.
Warto tutaj skomentować nierozłączność warunków technicznych, ekono-micznych i bezpieczeństwa wyboru metody naprawy. Spełnienie tylko jednego lub dwóch warunków nie jest wystarczające do takiego wyboru. Wyjaśnieniu tego zagadnienia mogą posłużyć następujące przykłady:
– technicznie możliwa i ekonomicznie uzasadniona jest naprawa poprzez spawanie regeneracyjne pękniętego wału wirówki do mleka, jednak ze względów bezpieczeństwa taka metoda jest wykluczona, podobnie jest z bezpiecznikami prądowymi, topikowymi,
– technicznie możliwa jest i spełniająca warunki bezpieczeństwa metoda galwaniczna nanoszenia powłok ochronnych na części karoserii pojazdów ze szlachetnych metali (złota lub srebra), jednak nie stosuje się tej metody ze względu na zbyt wysokie koszty,
– ze względów bezpieczeństwa i ekonomicznie dopuszczalna jest regenera-cja paska układu rozrządu w silniku spalinowym, jednak technicznie jest to niewykonalne.
Podatność naprawcza obiektu jest to właściwość charakteryzująca jego przy-stosowanie do wykonywania napraw.
W ocenie podatności naprawczej należy uwzględnić następujące cechy obiektu technicznego [5]:
– powinien być zaprojektowany z zachowaniem modułowości zespołów,– przewody olejowe, paliwowe i elektryczne powinny być zaopatrzone
w złącza szybkomocujące, zapewniające szybki demontaż i montaż ele-mentów,
– możliwość wykorzystania w procesie demontażu i montażu typowych urządzeń i narzędzi,
– zespoły obiektu o masie powyżej 20 kg powinny posiadać odpowiednie zaczepy w celu zastosowania środków mechanizacji prac demontażowo--montażowych i transportowych,
– powinny być przewidziane powierzchnie bazowe (otwory, nakiełki) ele-mentów w celu ich wykorzystania w procesie regeneracji,
– możliwość dokładnego wzajemnego rozmieszczenia zespołów (kołki usta-lające, elementy kompensacyjne itp),
– znaki umożliwiające prawidłowy montaż współpracujących elementów obiektu,
– połączenia wciskowe, układy łożyskowe powinny posiadać odpowiednie bazy demontażowe umożliwiające stosowanie typowych ściągaczy,

211
– intensywnie korodujące powierzchnie, duże gabarytowo i cienkościenne części (kabiny, nadwozia) powinny być wydzielone konstrukcyjnie i łatwo wymienialne,
– konstrukcja części powinna pozwalać na stosowanie w procesie ich rege-neracji nowoczesnych metod i procesów technologicznych,
– inne.Do podstawowych wskaźników liczbowych oceny podatności naprawczej
obiektów można zaliczyć [3]:– średni czas naprawy Tn:
(7.1)
gdzie:n – ogólna liczba napraw w rozpatrywanym okresie,uni – czas trwania i-tej naprawy
Tn < Tdop
– średnia pracochłonność naprawy Pn:
(7.2)
– średni koszt naprawy:
(7.3)
gdzie: Tdop, Pdop, cdop – wartości dopuszczalne odpowiednio: czasu, pracochłon- ności i kosztów naprawy.
Podział napraw może być dokonany według różnych kryteriów:
KRYTERIUM ZAKRESUNaprawa bieżąca – polega na usunięciu powstałego zużycia technicznego
i przywróceniu maszynie jej sprawności użytkowej. Zakresy napraw bieżących maszyn i urządzeń są bardzo zróżnicowane. Naprawa bieżąca może być połączona z całkowitym lub częściowym demontażem.
Koszt naprawy jest uzależniony od przyjętego zakresu rzeczowego cyklu remontowego. Jeżeli nie można ustalić cykli remontowych, to koszt naprawy bie-żącej nie powinien przekroczyć 15% wartości odtworzeniowej maszyny. W zakre-sie napraw bieżących można modernizować maszyny i urządzenia, jednak pod warunkiem, że łączny koszt remontu bieżącego i modernizacji nie przekroczy dolnej granicy kosztu naprawy głównej.
Zakres czynności wykonywanych podczas naprawy bieżącej zależy przede wszystkim od:
– stopnia skomplikowania budowy obiektu,– ustalonych w przedsiębiorstwie warunków eksploatacyjnych,

212
– przyjętej w przedsiębiorstwie metody napraw,– jakości i terminowości wykonywanych przeglądów okresowych i rewizji.Naprawa średnia ma większy zakres niż naprawa bieżąca, a mniejszy niż
naprawa główna. Wymianie podlegają ważniejsze części, podzespoły lub zespoły. Naprawa taka powinna zapewnić prawidłowe użytkowanie obiektu do następnej naprawy średniej albo do głównej. Jej koszt nie powinien przekroczyć 40-50% wartości odtworzeniowej maszyny.
Naprawa główna polega na regeneracji lub wymianie wszystkich zużytych części i zespołów maszyny, które na skutek długotrwałego użytkowania znacznie obniżyły swoją zdatność użytkową. Jej celem jest przywrócenie maszynie pierwot-nego potencjału eksploatacyjnego.
Podstawą zakwalifikowania maszyn lub urządzeń do naprawy głównej są cykle remontowe i ich zakresy rzeczowe, wynikające z przyjętych normatywów remontowych. Koszt naprawy głównej nie powinien przekroczyć 75% wartości odtworzeniowej maszyny.
W małych przedsiębiorstwach przemysłowych, rolniczych i usługowych nie występują podsystemy napraw średnich i głównych obiektów technicznych. Naprawy te wykonuje się w zakładach specjalistycznych [2].
KRYTERIUM SPOSOBU NAPRAWYNaprawy indywidualne – polegają na identyfikacji uszkodzonej części,
demontażu, jej wymianie lub regeneracji oraz montażu i wykonaniu stosownych innych operacji technologicznych.
Naprawy modułowe – w tym przypadku ustala się, który z modułów (zespo-łów) obiektu jest uszkodzony i następuje jego wymiana na nowy. Naprawy modu-łowe charakterystyczne są dla sprzętu RTV, komputerów, ale również coraz czę-ściej występują w pojazdach, np. nie naprawia się uszkodzonego przewodu sondy--lambda, a wymienia cały moduł z czujnikiem, przewodem i złączką. Naprawy te podwyższają niezawodność obiektu, wyrównują trwałość międzynaprawczą (po naprawie wszystkie części w danym module są nowe), jednak wpływają na zwięk-szenie kosztów.
Naprawy poprzez wymianę obiektu na równorzędny, który został poddany naprawie głównej – stosuje się dla obiektów, które są masowo eksploatowane i popyt na szybką ich wymianę jest znaczny. Taki rodzaj usług świadczą wyspe-cjalizowane firmy, które prowadzą naprawy główne obiektów i oferują zregene-rowane części, zespoły lub kompletne obiekty techniczne, np.: silniki elektryczne, silniki spalinowe do ciągników rolniczych, alternatory, rozruszniki, pompy wtry-skowe lub wkłady do drukarek.

213
KRYTERIUM STRATEGII UTRZYMANIA MASZYNNaprawy awaryjne – charakterystyczne dla strategii do uszkodzenia. Nie są
prowadzone obsługi techniczne (konserwacje, przeglądy, diagnostyka), a dopiero w przypadku uszkodzenia podejmuje się naprawę lub wymienia obiekt na nowy. Dla większości eksploatowanych obiektów przemysłowych takie naprawy są nie-pożądane i dąży się do ich ograniczenia, jednak istnieje wiele przykładów, gdzie eksploatatorzy godzą się na taką strategię, z zachowaniem rozsądnego kryterium ekonomicznego i bezpieczeństwa, np.: żarówki, sprzęt RTV i AGD.
Naprawy planowe – wynikają ze strategii planowo-zapobiegawczej. Termin i zakres ustalany jest z góry, po upływie przewidzianego czasu użytkowania, prze-biegu, wykonanych cykli roboczych. Naprawy planowe ograniczają ryzyko wystą-pienia awarii, stosuje się je dla obiektów ważnych, których uszkodzenie awaryjne może naruszyć zasady bezpieczeństwa technicznego i cywilnego. Często prawo nakazuje przyjęcie takiej strategii (naprawy planowe stosowane w eksploatacji dźwigów osobowych i towarowych, samolotów, urządzeń ciśnieniowych). Warto jeszcze zauważyć, że naprawy planowe są odpowiednie dla obiektów o niskiej podatności diagnostycznej (wysokie koszty diagnozy lub niska skuteczność). Wadą strategii planowo-zapobiegawczej, a tym samym napraw planowych jest wymiana części o dobrym stanie technicznym, obniża to ryzyko uszkodzeń awa-ryjnych, jednak podwyższa koszty eksploatacji.
Naprawy wg stanu – przewidziane są dla obiektów strategicznych, od których niezawodności w szczególny sposób zależy bezpieczeństwo ludzi i całego pod-miotu gospodarczego. Warunkiem wdrożenia strategii według stanu jest moni-toring diagnostyczny i dobrze opracowany model prognostyczny rozwoju uszko-dzeń. Jeżeli obiekt jest zdatny, następuje przewidywanie rozwoju stanu, czyli pro-gnozowanie stanu. W praktyce sprowadza się to do ustalenia terminu następnego diagnozowania obiektu, po czym wykonuje się niezbędne czynności obsługiwa-nia (np. smarowanie). W przypadku niezdatności obiektu są ustalone przyczyny stanu niezdatności (np. uszkodzenia). W następnym kroku przyczyny te są usu-wane i kontrolowane (powtórne diagnozowanie). Następny etap to prognozowa-nie stanu i w końcu wykonanie niezbędnych napraw. Bardzo ważna w strategii wg stanu jest autodiagnostyka, czyli kontrolowanie systemów diagnostycznych. Błędne wskazania tych systemów mogą doprowadzić do podjęcia zbędnych dzia-łań naprawczych obiektu monitorowanego lub spowodować jego awarię, czyli sytuację, która z założenia tej strategii nie powinna mieć miejsca.
Ze względów logistycznych naprawy można jeszcze rozpatrywać pod kątem miejsca ich realizacji [7]:
– w miejscu użytkowania,– w miejscu postoju,– w serwisie wewnętrznym,

214
– w serwisie zewnętrznym (nieautoryzowanym lub autoryzowanym, gdzie mogą być wyłącznie realizowane naprawy gwarancyjne).
7.2. Proces technologiczny naprawy
Przed rozpoczęciem naprawy opracowuje się procedurę, nazywaną procesem technologicznym naprawy, w ramach której szczegółowo określa się wszystkie operacje technologiczne. W odniesieniu do zespołów i podzespołów należy opra-cować technologię ich napraw. Do poszcze gólnych części dobiera się odpowiednie metody ich regeneracji. Dotyczy to oczywiście tych części, które można lub opłaca się regenerować.
Przed opracowaniem procesu technologicznego należy najpierw maszynę lub urządzenie zdemontować na elementy składowe – części. Część maszyny jest wykonana z jednego kawałka materiału, bez łączeń (dopuszcza się jedynie połą-czenia nierozłączne, np. spawanie). W częściach wyróżnia się elementy konstruk-cyjne, np. czop wału, wieniec uzębiony koła zębatego, łeb śru by. Zbiór części współpracujących ze sobą tworzy podzespół. Połączone ze sobą podzespoły dające się wyodrębnić z całości urządzenia lub maszyny i spełniające określone funkcje tworzą zespół. Na przykład – zespołem może być kompletny układ hydrauliczny, a podzespołem – pompa tego układu. Ze wzglę dów technologiczno-organizacyj-nych do zespołów zalicza się również duże jednolite bloki konstrukcyjne takie, jak ramy i kadłuby (korpusy) maszyn.
Czynności naprawcze (demontażowe, weryfikacyjne, regeneracyjne, mon-tażowe) w różnym stopniu dotyczą poszczególnych zespołów, podzespołów, a zwłaszcza części. Ich zakres zależy od takich cech, jak: trwałość, rozłączalność oraz podatność na wykonanie naprawy lub regeneracji. W związku z tym niektóre elementy wcale nie podlegają naprawom, inne częściowo, np. tylko są demonto-wane, a potem montowane. Uwzględnianie wymagań naprawczych jest istotne przede wszystkim w praktyce, gdyż określa technologiczne przygotowanie prac, organizację procesu technologicznego remontu i zaopatrzenie w części zamienne [3]. Pomimo różnorodności procesów technologicznych naprawy można wyróż-nić charakterystyczne etapy tego procesu, mające miejsce w większości działań naprawczych (rys. 7.1).
Projekt procesu technologicznego wiąże się z opracowaniem dokumentacji, która składa się z [3]:
– dokumentacji konstrukcyjnej,– warunków technicznych naprawy,– dokumentacji technologicznej.
Dokumentacja konstrukcyjna zawiera:

215
– rysunki konstrukcyjne części regenerowanych lub produkowanych,– rysunki zestawieniowe (montażowe) podzespołów i zespołów.Warunki techniczne zawierają informacje nt.:– zasad przyjęcia obiektów do naprawy,– zasad weryfikacji części maszyn,– zasad demontażu, montażu oraz regulacji,– zasad odbioru obiektów po naprawie.
Rys. 7.1. Schemat procesu technologicznego naprawy.
Opracowanie własne na podstawie [2].
Przyjęcie obiektu do naprawy
Przechowywanie obiektów oczekujących
na naprawę
Mycie i czyszczenie zewnętrzne
Demontaż
Mycie i czyszczenie części
Weryfikacja części Złomowanie
Regeneracja
Kontrola jakości
Kompletowanie części
Montaż
Kontrola jakości
Przekazanie obiektupo naprawie
Kontrola jakości
Części nowe

216
Dokumentacja technologiczna obejmuje:– karty technologiczne (plany operacyjne),– instrukcje,– wykaz oprzyrządowania,– wykaz materiałów pomocniczych,– schematy.Opracowanie dokumentacji technologicznej zależy od jej przeznaczenia, np.
instrukcje stanowią opis niezbędnych czynności, uzupełniony o tabele, fotografie i rysunki poglądowe. Dobrze opracowana instrukcja powinna być zrozumiała dla pracowników, którzy nie mieli jeszcze do czynienia z opisanym problemem.
Karty technologiczne, wykazy oprzyrządowania i materiałów są uprosz-czoną wersją instrukcji i zawierają jedynie podstawowe informacje o danej ope-racji, przedstawiane w formie tabeli. Różne są wzory kart technologicznych (np. rys. 7.2), jednak powinno się z nich uzyskać odpowiedź na następujące pytania:
– Jaka jest kolejność wykonywanych operacji, zabiegów czynności?– Co należy zrobić (opis operacji)?– Za pomocą czego wykonać operację (wykaz narządzi, przyrządów
i pomocy warsztatowych)?– Jaka jest norma czasowa na wykonanie poszczególnych operacji?– Jakie są parametry normatywne dla wykonywanych czynności, np. pręd-
kość skrawania, moment siły przy montażu połączeń gwintowych?– Jakie są szczególne wymagania?

217
Rys. 7.2. Karta technologiczna szlifowania czopu wału korbowego [6].
Schematy stanowią najbardziej uproszczoną formę przekazywania infor-macji o operacjach technologicznych. Żeby zrozumieć ten przekaz informacji, trzeba znać zasady konstrukcji schematów, znaczenie użytych symboli, kolejność odczytywania informacji (np. schemat demontażu czyta się od prawej strony do lewej, a w przypadku montażu odwrotnie – (rys. 7.3). Pomimo tych uproszczeń, doświadczony pracownik, patrząc na dany schemat, wie, co ma robić i w jakiej kolejności.

218
Rys. 7.3. Schemat montażowy rozdzielacza hydraulicznego.Opracowanie własne.

219
7.2.1. Przyjęcie do naprawyTen etap procesu technologicznego zależy od charakteru świadczonych usług:– naprawy dla własnego podmiotu gospodarczego (np. dział utrzymania
ruchu świadczy usługi dla działu produkcyjnego),– naprawy dla instytucji zewnętrznych.W pierwszym przypadku maszyny i urządzenia kwalifikuje się do naprawy
na podstawie kryteriów wskazanych przez przyjętą strategię utrzymania maszyn. Opracowuje się plany remontowe na podstawie własnych doświadczeń, przepi-sów prawa lub dokumentacji techniczno-ruchowej. W przypadku awarii urzą-dzenia (maszyny) sporządza się protokół awaryjny. Po określeniu rodzaju zaist-niałego uszkodzenia zostaje wystawione zlecenie na wykonanie naprawy części, podzespołu lub zespołu. Po ustawieniu i zabezpieczeniu urządzenia na stanowi-sku remontowym oraz po oględzinach zewnętrznych zostaje wypełniony protokół przyjęcia, który zawiera informacje o stanie technicznym urządzenia. Określa się w nim, między innymi, rodzaj uszkodzenia, przewidywany termin remontu itp. W nowoczesnych firmach ten etap jest wspomagany przez systemy informatyczne klasy CMMS (rozdział 10.4).
Świadczenie usług naprawczych na zewnątrz charakteryzuje się tym, że wypeł-niany jest protokół zdawczo-odbiorczy. Pierwszą część tego protokołu wypełnia się na etapie przyjęcia obiektu do naprawy. Standardowe dane tego protokołu to:
– identyfikacja zleceniodawcy,– identyfikacja obiektu (maszyny, urządzenia, pojazdu itp.),– symptomy uszkodzenia (uzyskane na podstawie wywiadu ze zlecenio-
dawcą – często klient nie potrafi określić, co się uszkodziło, a jedynie podać zaobserwowane objawy),
– wstępnie ustalony zakres naprawy,– planowany termin i koszt naprawy – dobra firma powinna być przygoto-
wana na trafne oszacowanie tych danych, są to pytania najczęściej zada-wane przez klientów,
– zaobserwowane uszkodzenia lub braki, nie podlegające naprawie,– diagnozowanie (czasami występuje konieczność przeprowadzenia badań
diagnostycznych przed demontażem maszyny, wykonywanych w celu identyfikacji uszkodzeń; na podstawie wyników badań diagnostycznych ustalany jest wstępny zakres naprawy).
7.2.2. PrzechowywanieZapewnienie odpowiednich warunków przechowywania powierzonych
obiektów technicznych jest podstawowym obowiązkiem zakładów naprawczych. Nawet powierzchowny przegląd tych warunków od razu świadczy o kulturze tech-

220
nicznej i organizacyjnej przedsiębiorstwa. Można wyróżnić dwa aspekty związane z tym zagadnieniem:
– warunki techniczne przechowywania,– zabezpieczenia prawne.W pierwszym przypadku należy zapewnić odpowiednią przestrzeń, regały
z określoną nośnością, temperaturę, wilgotność, wydzielone drogi komunikacji wewnętrznej, oznakowania, zabezpieczenia przed dostępem osób nieuprawnio-nych, zabezpieczenia przed zagrożeniami środowiskowymi (pożarem, wyładowa-niami atmosferycznymi, przepięciami w sieci elektrycznej itp.).
Ponieważ w każdej organizacji mogą zdarzyć się nieprzewidziane sytuacje (kradzież, dewastacja, błędy ludzkie), dobre przedsiębiorstwo przewiduje takie sytuacje i stosuje odpowiednie zabezpieczenia prawne (ubezpieczenia od odpo-wiedzialności cywilnej, majątkowe, od kradzieży itp.).
Oczywiście zakres zabezpieczeń technicznych i prawnych powinien być indy-widualnie dobrany w zależności od wartości obiektów i ich znaczenia dla przed-siębiorstwa i klienta.
7.2.3. Czyszczenie i mycie zewnętrzne Ten etap nie zawsze występuje w procesie technologicznym, jednak są takie
obiekty, które przed demontażem wymagają takiej operacji.Zanieczyszczenia różnego pochodzenia często wzajemnie się wiążą, two-
rząc zwartą i twardą powłokę mocno przyczepioną do powierzchni. Zanieczysz-czenia spowodowane kurzem i pyłem usuwa się, spłukując je ciepłą lub zimną wodą. Poszczególne elementy można czyścić strumieniem sprężonego powietrza. Trudna do usunięcia jest stara, zniszczona powłoka malarska. Szczególnie niebez-pieczne są pęcherze i łuszczące się warstwy tej powłoki, pod którymi gro madzi się woda, wywołując korozję elektrochemiczną. Nałożenie powłoki renowacyjnej na zniszczone pokrycie malarskie powoduje powstawanie nowych pęcherzy i odry-wanie się od podłoża zarówno starego, jak i nowego pokrycia.
Oleje i smary plastyczne niszczą malarskie powłoki ochronne, w wyniku czego następuje bezpośredni kontakt stalowych powierzchni maszyn z wodą i innymi zanieczyszczeniami przyspieszającymi korozję atmosferyczną.
W zależności od natury zanieczyszczeń, zagrożenia korozyjnego oraz innych okoliczności, stosuje się następujące metody oczyszczania zewnętrznego [5]:
– mechaniczne czyszczenie za pomocą różnego rodzaju narzędzi,– przedmuchiwanie sprężonym powietrzem lub przegrzaną parą,– metody termiczne (wytapianie, wypalanie, wykorzystywanie zjawiska szo-
ku termicznego w celu wywołania odpryskiwania zanieczyszczeń),– mycie ciepłą wodą lub wodą pod wysokim ciśnieniem,– mycie paro-wodne,– mycie wodą z dodatkiem środków powierzchniowo czynnych,

221
– mycie ręczne rozpuszczalnikami,– za pomocą past złożonych z rozpuszczalników, substancji powierzchnio-
woczynnych, szlifujących oraz wiskozujących (zagęstników),– mycie specjalnymi środkami (np. redukującymi lub utleniającymi w celu
usunięcia zabarwień).Oddzielnym problemem jest oczyszczanie urządzeń z zanieczyszczeń palnych
i tworzących mieszaniny wybuchowe (par z powietrzem). Względy bezpieczeń-stwa wymagają, oprócz starannego usunięcia tych zanieczyszczeń, również cał-kowitego wyparcia wszystkich par zdolnych do wybuchu z wewnętrznych, pół-zamkniętych przestrzeni urządzeń. Niektóre urządzenia wymagają wyjątkowo starannego oczyszczenia, nawet ze śladowych pozostałości (np. śladów substancji silnie toksycznych) lub dezynfekcji. Są to urządzenia stosowane w przemyśle far-maceutycznym, w przemysłowej realizacji procesów biotechnologicznych oraz np. w urządzeniach do wywozu śmieci. Na rys. 7.4 i 7.5 pokazano przykłady oczysz-czania zewnętrznego.
Rys. 7.4. Urządzenie do zbierania wody i oleju. http://www.czystapolska.pl/prezentacje.html

222
Rys. 7.5. Mycie parą wodną – czyszczenie i dezynfekcja urządzeń przemysłu spożywczego. http://www.czystapolska.pl/prezentacje.html
7.2.4. DemontażPo prawidłowo wykonanym demontażu części powinny zachować taką uży-
teczność, jaką miały przed rozłączeniem, tzn. na skutek tego procesu nie powinny powstać dodatkowe uszkodzenia w rodzaju: zniszczenia powierzchni współpracu-jących, zatarcia powierzchni roboczych, zerwania gwintów, uszkodzenia otworów, zniszczenia łożysk tocznych itp.
Do czterech podstawowych zasad prawidłowego demontażu należą:– stosowanie właściwej kolejności operacji demontażu (ze względu na
osiągnięcie wysokiej wydajności, technologiczności i bezpieczeństwa pracy),
– stosowanie odpowiednich narzędzi,– stosowanie metod rozluźniania połączeń. Metoda termalna – np. pod-
grzewa się śruby i obejmujące je części do temperatury 150-200°C, co zwiększa luz między rozłączanymi częściami maszyny i umożliwia odry-wanie się produktów korozji od powierzchni części na skutek różnych współczynników rozszerzalności cieplnej metalu i produktów korozji. Metoda chemiczna – np. różnego rodzaju połączenia śrubowe, klinowe, wpustowe, wielowypustowe i inne rozłączne polewa się lub zanurza w naf-cie, w ciekłym roztworze sody lub innym środku o działaniu odrdzewia-jącym. Zabieg ten powoduje rozluźnienie produktów korozji w połącze-niach. Metoda udarowa polega na wykorzystaniu narzędzi dających efekt

223
oddziaływania drgań w czasie demontażu, np. wkrętaki udarowe, pistolety pneumatyczne. Zastosowanie metod udarowych ma na celu „poruszenie” względem siebie połączonych części oraz „wykruszenie” zanieczyszczeń znajdujących się na powierzchni połączenia,
– znakowanie wzajemnego, względnego położenia części – stosuje się po to, aby przy montażu można było zachować to położenie. Zasada ta znaj-duje zastosowanie w przypadku części współpracujących, dotartych, które będą ponownie wykorzystane lub w przypadku części z układów wirniko-wych, które stanowią wyważony układ.
Do podstawowych metod organizacji pracy można zaliczyć [2]:Metodę stanowisk uniwersalnych – operacje, zabiegi i czynności wykony-
wane są na jednym stanowisku przy wykorzystaniu narzędzi uniwersalnych, przez pracowników mających szeroką, uniwersalną wiedzę techniczną. Pomimo oczy-wistych wad takiej metody (niska wydajność, brak automatyzacji prac, problemy z kontrolą jakości), metoda stanowisk uniwersalnych pozwala na obsługę napraw-czą różnego rodzaju zespołów, np. w naprawach pojazdów samochodowych: układu hamulcowego, zawieszenia, przeniesienia napędu itd.
Metodę stanowisk specjalistycznych – prace wykonywane są nie przez jedną osobę lub jedną brygadę, lecz kilka brygad specjalizowanych. Stosowany jest tutaj specjalistyczny sprzęt dedykowany dla konkretnego zespołu naprawianego obiektu, np.: stanowisko montażu i naprawy alternatorów, instalacji paliwowej, instalacji elektrycznej, skrzyń przekładniowych itp. W tej metodzie ułatwione jest zorganizowanie stanowisk kontroli jakości, skrócony czas naprawy, podejmowa-nie zleceń na naprawy specjalistyczne.
Metodę gniazdową – jest formą organizacji procesu technologicznego, charakteryzującą się jego podziałem na określone grupy operacji. Najczęściej wydziela się w tej metodzie stanowisko uniwersalne (np. demontażu i montażu ogólnego), z którego trafiają konkretne podzespoły na stanowiska specjalistyczne.
Metodę potokową – istota metody polega na uszeregowaniu w linię stano-wisk specjalistycznych, na których kolejno wykonywane są poszczególne opera-cje. Pozwala ona na wprowadzenie ścisłej specjalizacji pracowników (wykorzy-stanie pracowników o niższych kwalifikacjach), automatyzację prac, skrócenie czasu naprawy, wkomponowanie w linię technologiczną punktów kontroli jako-ści. Zastosowanie metody potokowej znajduje jednak swoje uzasadnienie tylko w przypadku znacznego programu produkcyjnego zakładu naprawczego, gdzie fundusz naprawczy jest jednorodny (maksymalnie dwa typy obiektów), cięgle uzupełniany oraz można zachować rytm i takt pracy.
7.2.5. Mycie i czyszczenie częściSposób postępowania podczas usuwania zanieczyszczeń zależy od ich
rodzaju, materiału, z jakiego jest wykonany element i jego wielkości, dokładności

224
obróbki oraz specjalnych wymagań dotyczących czystości powierzchni. Niekiedy konieczne jest stosowanie kolejno różnych kąpieli (mycia w roztworach alkalicz-nych, następnie trawienia w kwasach) oraz doczyszczania mechanicznego.
Celem tego etapu procesu technologicznego jest [5]:– przygotowanie części do weryfikacji,– przygotowanie części do regeneracji,– zachowanie czystości technologicznej przy montażu.W myciu i czyszczeniu części można wyróżnić dwie grupy metod:– mechaniczne,– fizyko-chemiczne.Czyszczenie mechaniczne może być wykonywane ręcznie (szczotki druciane,
papier ścierny, pilniki, skrobaki, z wykorzystaniem elektronarzędzi, np. szlifie-rek kątowych, oscylacyjnych) lub z wykorzystaniem specjalistycznych urządzeń (piaskowanie, śrutowanie – rys. 7.6, czyszczenie w bębnach, kielichach, wytrzą-sarkach, mycie hydrodynamiczne – wykorzystanie strumienia wody o ciśnieniu około 0,5 MPa zmieszanego z piaskiem kwarcowym). Każda z wymienionych metod mechanicznych charakteryzuje się tym, że po jej zastosowaniu ulega zmia-nie chropowatość warstwy wierzchniej czyszczonych części. Nie mogą zatem być stosowane części precyzyjnie pasowane i takie, które mogą ulec zniszczeniu przy oddziaływaniu mechanicznym ścierniwa. Czyszczenie mechaniczne stosowane jest głównie do usuwania nagaru, brudu i kurzu, resztek farb i lakierów oraz pro-duktów korozji.
Rys. 7.6. Schemat urządzenia do bezpyłowego śrutowania z odzyskiem ścierniwa: 1– wąż śrutowania, 2 – dysza śrutowania, 3 – uchwyt szczotki, 4 – wąż odsysający, 5 – separator zanieczyszczeń ciężkich oraz pyłów, 6 – silos recyrkulacji, 7 – zbiornik zanieczyszczeń, 8 – odsysacz trójagregatowy, 9 – filtr ochronny odsysacza.Źródło: http://www.sciteex.com.pl/oczyszczarki/mistral.htm
7
9
8
4
1
5
6
3 2

225
Metody fizyko-chemiczne można podzielić na:– chemiczne,– paro-wodne,– elektrolityczne,– ultradźwiękowe.
Do typowego, chemicznego oczyszczenia części należy zaliczyć te wszystkie metody, w których główny efekt usuwania zanieczyszczeń jest wywołany reak-cjami chemicznymi (rozpuszczanie tłuszczy, nagaru, kamienia kotłowego, pro-duktów korozji, starych powłok malarskich).
W chemicznym myciu wykorzystywane są:– rozpuszczalniki organiczne (nafta, benzyna, olej napędowy, benzen, ace-
ton, spirytus i inne); rozpuszczalniki stosuje się głównie do odtłuszcza-nia części; ich własności powodują, że skutecznie działają w temperaturze pokojowej, nie trzeba stosować operacji osuszania (związki lotne), zacho-wują wysoką stabilność fizykochemiczną; wadą stosowania rozpuszczalni-ków jest ich łatwopalność i toksyczność,
– roztwory zasadowe (soda kaustyczna i kalcynowana, chromian potasu, szkło wodne, fosforan trójsodowy); główne zastosowanie to odłuszcza-nie części, ale również zdejmowanie nagaru i starego lakieru z blach sta-lowych – w tych przypadkach występuje znaczne stężenie, przekraczające 150g/l, gdzie przy standardowym zastosowaniu do odłuszczania stężenie to wynosi od kilku do 60 g/l; wadą roztworów zasadowych jest ich agresywne oddziaływanie, głównie na metale kolorowe, wywołujące ich korozję oraz konieczność dostarczania energii do podgrzania kąpieli – skuteczność mycia w roztworach zasadowych rośnie ze wzrostem temperatury (stan-dardowa temperatura w kąpielach odtłuszczających wynosi 60-80 oC);
– roztwory kwasów organicznych (octowy, mlekowy, szczawiowy) i nieorga-nicznych (solny, fosforowy, siarkowy, azotowy) stosuje się przede wszyst-kim do odrdzewiania, zdejmowania kamienia kotłowego, rozpuszczania starych powłok lakierniczych i elektrolitycznych; w przypadku zdejmo-wania kamienia kotłowego wymagane jest podgrzanie roztworu nawet do temperatury 90oC,
– specjalne środki myjące – emulsole, które stanowią mieszaninę rozpusz-czalników i środków myjących, tworzą układ rozpuszczalnik-emulgator; środki te, wymieszane z wodą, tworzą trwałe emulsje. Ich różnorodność składu chemicznego, pozwala na precyzyjne dobranie, w zależności od rodzaju materiału części i zanieczyszczeń (są to gotowe preparaty, dedy-kowane pod konkretne zastosowanie).
Mycie parowodne polega na tym, że przegrzana para łącznie z gorącą wodą pod ciśnieniem 0,4-0,8 MPa omywa część. Temperatura mieszaniny na wyjściu z

226
dyszy wynosi około 150oC. Zamiast czystej wody można stosować dodatek środka myjącego (np. odtłuszczającego). Metodę stosuje się do mycia zbiorników wielko-gabarytowych oraz dezynfekcji, np. cystern samochodowych – rys. 7.7.
Rys. 7.7. Schemat sytemu mycia parowodnego cystern z opuszczanymi wysokociśnienio-wymi głowicami myjącymi.Źródło: http://vacattechnika.wordpress.com/tag/mycie-cystern/
Elektrochemiczne oczyszczanie części polega na chemicznym oddziaływa-niu roztworu ługowego oraz mechanicznym gazów wydzielających się na elektro-dach w wyniku elektrolizy wody. Można wyróżnić metodę katodową i anodową (w zależności, którą z elektrod stanowi część oczyszczana). Metoda katodowa, przy której wydziela się na powierzchni części wodór, jest bardziej wydajna, jed-nak istnieje groźba nawodorowania warstwy wierzchniej, przez co część staje się krucha, nieodporna na oddziaływania udarowe. Elektrochemiczne oczyszczanie stosowane jest głównie przy odłuszczaniu.
technologia ultradźwiękowa stosowana jest głównie do mycia powierzchni detali o skomplikowanych kształtach, trudno dostępnych zakamarków, otworów i szczelin. Proces mycia polega na generowaniu fal ciśnieniowych wysokiej czę-stotliwości, wywołujących w kąpieli zjawisko zwane kawitacją. Miliony małych pęcherzyków implodują na powierzchni oczyszczanego przedmiotu i usuwają cząstki zanieczyszczeń (oleju, pyłów, past polerskich, wiórów itp.). Mycie ultradź-więkowe zapobiega powstawaniu uszkodzeń mechanicznych detali, zapewniając najwyższą jakość i precyzję mycia. Skutecznością przewyższa tradycyjne, ręczne i natryskowe metody mycia. Schemat standardowej myjki ultradźwiękowej przed-stawiono na rys. 7.8.

227
Rys. 7.8. Schemat budowy myjki ultradźwiękowej: 1– korpus wanny, 2 – pompa spłuki-wania, 3 – grzałki, 4 – spust osadu, 5 – osadnik górny, 6 – spust osadnika, 7 – sterownik myjni, 8 – panele ultradźwiękowe, 9 – część brudna, 10 – kierunek spłukiwania.Źródło: http://geepard.pl/ultron/
Przykłady zastosowań technologii ultradźwiękowej:Medycyna – mycie narzędzi chirurgicznych i stomatologicznych.Laboratoria – mycie szkła laboratoryjnego, mycie kuwet bioanalizatorów, sit,
filtrów i pierścieni ceramicznych, dyspergowanie ciał stałych w cieczach, przyspie-szanie niektórych reakcji chemicznych.
Przemysł – oczyszczanie, odtłuszczanie, usuwanie rdzy z powierzchni meta-lowych detali przed malowaniem proszkowym i nakładaniem powłok galwanicz-nych, mycie międzyoperacyjne, usuwanie wiórów, smarów, past polerskich, mycie podzespołów kompletnych precyzyjnych mechanizmów bez demontażu, mycie przyrządów i narzędzi pomiarowych, mycie sit i dysz z osadów i zanieczyszczeń, mycie form wulkanizacyjnych, mycie podzespołów samochodowych, tj. głowic, gaźników, aparatury wtryskowej itp.
Poligrafia – usuwanie nienaświetlonych fotopolimerów; – mycie wałków rastrowych.
Optyka – mycie szkła po szlifowaniu i polerowaniu, mycie szkła przed naparo-waniem próżniowym, mycie okularów bez konieczności wyjmowania szkieł opra-wek.
Elektronika – mycie obwodów drukowanych po montażu, mycie złączy, mycie modułów telefonów komórkowych, mycie podzespołów płyt głównych kompute-rów.

228
Jak z powyższego wynika, mycie ultradźwiękowe znajduje bardzo szerokie zastosowanie i charakteryzuje się wysoką skutecznością. Wadą tej metody jest znaczny koszt instalacji i brak uniwersalności myjek ultradźwiękowych – więk-szość instalacji musi być specjalnie projektowana do konkretnego zastosowania (rozwiązania konstrukcyjne i dobór środków chemicznych).
Należy również zauważyć, że jeżeli pozostałości kąpieli oczyszczających (w większości metod) nie są dostatecznie spłukane, to po odparowaniu wody na powierzchniach elementów powstają białe naloty, zawierające sodę kaustyczną, sodę amoniakalną oraz fosforany. Działają one destrukcyjnie na składniki orga-niczne powłoki i zmniejszają przyczepność i trwałość powłok malarskich. Pozo-stałości środków myjących na powierzchniach elementów współpracujących nisz-czą ich zewnętrzną (roboczą) mikrowarstewkę, powodując powstawanie w niej drobnych wżerów i pęknięć oraz wywołują korozję matali. Jeżeli elementy maszy-nowe pracują w środowisku oleju lub smaru plastycznego, to związki alkaliczne powodują rozkład warstewki smaru plastycznego, bezpośrednio przylegającego do zanieczyszczonej powierzchni. Pogarsza to właściwości środków smarnych, zwiększa współczynnik tarcia i powoduje szybsze zużywanie elementów, zwłasz-cza precyzyjnych.
Ogólnie można wyróżnić dwie technologie mycia części: natryskową (myjki ciśnieniowe, mycie parowodne, mycie hydrodynamiczne, myjki tunelowe) oraz zanurzeniową (mycie w rozpuszczalnikach, elektrochemiczne, ultradźwiękowe). Przykłady urządzeń myjących podano na rys. 7.9÷7.11.
Rys. 7.9. Uniwersalna myjnia komorowa, natryskowa przeznaczona do mycia, odtłuszcza-nia, fosforanowania itp.Źródło: http://myjnie.cba.pl/

229
Rys. 7.10. Kabina do mycia natryskowego części wielkogabarytowych.Źródło: http://vacattechnika.wordpress.com
Rys. 7.11. Myjnia zamykana – szczelna, znajduje zastosowanie w przypadku mycia sub-stancjami, które w otwartej przestrzeni są bardzo uciążliwe ze względu na swój zapach, agresywność, itp. Rękawy gumowe pozwalają wsunąć ręce i wykonać operacje w trudno-dostępnych miejscach. Źródło http://myjnie.cba.pl

230
Rys. 7.11. Wnętrze myjni tunelowej, w której na przenośniku taśmowym są układane czę-ści przeznaczone do mycia. Źródło: http://www.redicalus.com.pl
7.2.6. Weryfikacja częściCelem weryfikacji części na etapie naprawy jest identyfikacja ich przydatności
do dalszego wykorzystania. Możliwe są trzy orzeczenia weryfikacyjne: wykorzy-stanie dalsze części w stanie zastanym, skierowanie do regeneracji lub złomowa-nie. Decyzje te podejmuje się na podstawie kryteriów zawartych w kartach weryfi-kacyjnych oraz przeprowadzonych badań, do których można zaliczyć:
Badania organoleptyczne – najczęściej, przy weryfikacji części są to bada-nia wzrokowe, prowadzone okiem nieuzbrojonym lub z wykorzystaniem szkieł powiększających albo mikroskopów. Badania te prowadzi się dla określenia rodzaju zużycia (rozdział 6.2), które determinuje ewentualny dobór metody rege-neracji. Dodatkowe zadanie przy identyfikacji rodzaju zużycie polega na wychwy-ceniu sytuacji, gdzie zużycie ma charakter awaryjny (przedwczesne zużycie) lub wystąpiło uszkodzenie wtórne (zależne od i innego uszkodzenia). Brak takiej identyfikacji przyczyn zużycia, może powodować ponowne uszkodzenie części wymienionych lub zregenerowanych, po krótkim okresie ich użytkowania.
Badania wymiarów geometrycznych – podstawowe badania weryfikacyjne, stosowane dla większości części. Ich zastosowanie ma na celu określenie stopnia zużycia warstwy wierzchniej i oszacowania luzów powstających po zmontowa-

231
niu części. Zmierzone wymiary porównuje się z wartościami granicznymi, które podane są w kartach weryfikacyjnych. Narzędzia i przyrządy wykorzystywane do pomiarów geometrycznych to między innymi:
– suwmiarki uniwersalne, w tym suwmiarki analogowe z podziałką kre-skową na prowadnicy i noniuszem na suwaku, suwmiarki czujnikowe z listwą zębatą na prowadnicy i czujnikiem zegarowym, suwmiarki cyfrowe z naklejonym na prowadnicy liniałem pojemnościowym i elek-tronicznym wskaźnikiem cyfrowym,
– suwmiarki modułowe – służące do pomiaru wartości wielkości geome-trycznych zęba koła zębatego,
– mikrometr – zwany także mikromierzem dla odróżnienia od mikrometra jako jednostki miary – przyrząd pomiarowy służący do mierzenia przed-miotów z rozdzielczością rzędu 0,01 mm, z interpolacją do 1 μm,
– czujnik zegarowy – urządzenie pomiarowe, na którego podzielni znajduje się podziałka rozmieszczona na okręgu, tak jak w tradycyjnym zegarku. Czujniki zegarowe wyposażone są najczęściej w przekładnię zębatą, a ich wskazówka wykonuje kilka obrotów w całym zakresie pomiarowym. Czujniki zegarowe znalazły szerokie zastosowanie w pracach warsztato-wych do pomiarów średniej dokładności, wówczas gdy inne przyrządy pomiarowe nie zapewniają wymaganej dokładności. Wykorzystywane są także przy kontroli wymiarów, do ustawienia obrabianych przedmiotów i narzędzi na obrabiarkach oraz do sprawdzania odchyłek kształtu i poło-żenia,
– głębokościomierz mikrometryczny. Dzięki różnym końcówkom pomiaro-wym głębokościomierze pozwalają mierzyć głębokość w różnych zakre-sach z dokładnością do 0,001 mm,
– promieniomierz – przyrząd pomiarowy służący do pomiaru promieni łuków zewnętrznych i wewnętrznych,
– średnicówka – przyrząd pomiarowy do mierzenia wymiarów wewnętrz-nych, przede wszystkim średnic otworów,
– specjalistyczne przyrządy i wzorce produkowane do weryfikacji określo-nego rodzaju części.
Badania warstwy wierzchniej – w badaniach weryfikacyjnych, oprócz oględzin wzrokowych warstwy wierzchniej, wykonywane są również pomiary. Informa-cje na temat urządzeń i wielkości pomiarowych dotyczących warstwy wierzchniej przedstawiono w rozdziale 4.3.
Badania struktury wewnątrz materiału – do obiektywnej oceny jakości mate-riałów i części maszyn wykorzystuje się powszechnie badania nieniszczące. Dostarczają one informacji o stanie obiektu i nie powodują zmian zarówno badanych, jak i niebadanych właściwości użytkowych obiektu oraz jego funkcji. Zaliczamy do nich defektoskopię, która umożliwia znalezienie i identyfikację

232
nieciągłości struktury badanego obiektu (wadę, defekt). Mogą to być zanieczysz-czenia, pęknięcia i nieprawidłowości struktury wewnętrznej. Badania defekto-skopowe pozwalają wykryć nawet niewielkie wady materiału oraz określić ich wymiary i lokalizację. W pracach remontowych badania defektoskopowe wyko-nuje się głównie metodami penetracyjnymi, ultradźwiękowymi, magnetycz-nymi i rentgenowskimi. Metody penetracyjne polegają na wykorzystaniu cieczy łatwo wnikającej w wadę oraz na zabiegach umożliwiających powiększenie obrazu wykrytej wady. Metody ultradźwiękowe to wykorzystanie właściwości odbija-nia się fal ultradźwiękowych od powierzchni wewnętrznych wad w materiałach. Metody magnetyczne polegają na powstawaniu i wykrywaniu lokalnego rozpro-szenia linii sił pola magnetycznego nad wadą materiałową. Stosuje się je do bada-nia elementów z materiałów ferromagnetycznych. Metoda rentgenowska wyko-rzystuje zjawisko niejednakowego pochłaniania promieni rentgenowskich przez niejednorodny materiał.
Badania szczególne – w zależności od potrzeb stosuje się specjalistyczne bada-nia wybranych wartości wielkości fizycznych, np.:
– współczynnika sprężystości dla elementów sprężystych (pierścieni tłoko-wych, sprężyn płaskich lub spiralnych),
– współczynnika tłumienia w przypadku układów mających za zadanie wytłumienie drgań (wibroizolatory, amortyzatory),
– rezystancji – części elektroniczne i elektryczne.
7.2.6. Regeneracja częściRegeneracja części – działanie polegające na przywróceniu właściwości użyt-
kowych częściom zużytym lub uszkodzonym. Może ona mieć charakter obróbki kompleksowej, w wyniku której przywraca się częściom wymagany kształt, wymiary, parametry i właściwości niezbędne do dalszej pracy. Stosuje się ją zwłaszcza wtedy, gdy nie ma nowej, zastępczej części oraz wtedy, gdy odpad jest uciążliwy dla środowiska. Często, zwłaszcza w bardziej skomplikowanych urzą-dzeniach, wymienia się tylko jedną lub kilka części, przez co regeneruje się całość urządzenia. Podział metod regeneracji części maszyn przedstawiono w tab. 7.1.

233
tabela 7.1. Podział metod regeneracji.
Grupa metod Metoda regeneracjiMetody regeneracji czę-ści uszkodzonych awaryj-nie (złamania, pęknięcia, deformacje, przecięcia), których celem jest usunię-cie nieciągłości materiału lub prostowanie:
– spawanie regeneracyjne,– klejenie,– zszywanie (np. korpusów silników spalinowych),– łatanie,– odkształcenia plastyczne (statyczne, np. z wykorzystaniem
prasy hydraulicznej, dynamiczne, np. młotkowanie),– lutowanie (twarde, miękkie, lutospawanie),– wulkanizacja.
Metody regeneracji czę-ści zużytych – celem jest przywrócenie kształtów i wymiarów nominalnych lub luzu nominalnego:
– napawanie (gazowe, łukowe, plazmowe, elektrowibra-cyjne),
– powlekanie galwaniczne (np. żelazowanie, chromowanie, niklowanie),
– niklowanie chemiczne,– metalizacja natryskowa (gazowa, łukowa, plazmowa, prą-
dów wysokiej częstotliwości, detonacyjna, laserowa),– powłoki z tworzyw sztucznych (np. natryskiwanie pło-
mieniowe, fluidyzacja, nakładanie błon klejowych),– obróbka mechaniczna (wymiary naprawcze, zamiana
fragmentu części),– obróbka plastyczna (np. spęczanie, rozpęczanie, roztła-
czanie, wyciąganie),– wylewanie stopów łożyskowych (statyczne, odśrodkowe),– obróbka elektroiskrowa.
Metody regeneracji powłok ochronnych i dekoracyjnych:
– metalizacja,– powlekanie galwaniczne,– powlekanie chemiczne (fosforowanie, oksydowanie),– malowanie.
Źródło: Opracowanie własne na podstawie [4].
Poniżej scharakteryzowano wybrane metody regeneracji.Metodawymiarównaprawczych polega ona na odtworzeniu prawidłowych
kształtów geometrycznych i chropowatości powierzchni przy zachowaniu tego samego pasowania, lecz ze zmianą wymiarów nominalnych współpracującej pary elementów. Wymiary nominalne części zmieniają się w miarę przesuwania się w głąb materiału. Metoda ta jest stosowana zwykle do elementów osiowo-syme-trycznych, a więc do: tłoków, cylindrów, wałów, osi, sworzni, gniazd łożyskowych, czopów wałów wykorbionych itp. Jeden ze współpracujących elementów, np. łożysko, jest nowy (nadwymiarowy), a drugi – gniazdo łożyskowe – poddawany jest obróbce przez roztaczanie na większą średnicę. Może się zdarzyć, że obydwa

234
elementy wymienia się na nowe (nadwymiarowe), np. tłok silnika spalinowego i tuleję cylindra.
Metodaelementówdodatkowych(uzupełniających) polega na wprowadze niu do współpracującej pary elementu dodatkowego – kompensującego skutki zuży-cia. Najczęściej elementami uzupełniającymi są: tulejki, wycinki, listwy i nakładki oraz odtwarzane fragmenty części zużytych awaryjnie. Łączenie tych elementów z powierzchnią części zasadniczej zespołu odbywa się za pomocą wcisku, spawa-nia, nitowania, klejenia, gwintu itp. Zaletą tej metody jest możliwość jej stoso-wania zarówno przy zachowaniu wymiarów nominalnych, jak i nowych, remon-towych, ponadto elementy dodatkowe mogą być wykonane z innych materiałów niż części regenerowane. Nie wymaga ona specjalnego oprzyrządowania. Wadą metody jest wysoki koszt robocizny [4].
Metoda odkształceń plastycznych polega na wykorzystywaniu właściwości plastycznych niektórych metali bez obniżania wymaganej trwałości zmęczenio-wej. W wyniku działania naprężeń przekraczających granicę sprężystości mate-riał części przemieszcza się w sposób trwały w nadanym mu kierunku. Podczas regenera cji jest nim kierunek ku zużytej powierzchni. Materiał przemieszcza się aż do przywrócenia powierzchni jej poprzedniego kształtu i wymiaru, przy czym jednocześnie odkształca się inna, nieistotna ze względu na współpracę (pasowanie) powierzchnia regenerowanej części. Wykorzystywana w tej metodzie obróbka pla-styczna, np. spęczanie lub młotkowanie jest wykonywana na zimno lub na gorąco, w zależności od rodzaju materiału, jego uprzedniej obróbki cieplnej, kształtu czę-ści, charakteru jej pracy. Zaletą metody jest zmiana określonych wymiarów w gra-nicach z góry ustalonych oraz możliwość łączenia jej z innymi metodami regene-racji. Natomiast wady to: możliwość wystąpienia niepożądanych zmian kształtu, właściwości plastycznych oraz pęknięć w wyniku złej obróbki cieplnej, a także konieczność posiadania specjalnego oprzyrządowania i wyposażenia [4].
Metody regeneracji części urządzeń uszkodzonych awaryjnie. Do uszko-dzeń awaryjnych zalicza się trwałe odkształcenia plastyczne w postaci zgięcia, krę-cenia, zwichrowania oraz pęknięcia, rozerwania, odłamania itp. Elementy trwale odkształcone regeneruje się za pomocą prostowania na zimno lub na gorąco (600- -800 °C). Elementy pęknięte, rozerwane i połamane, w zależności od ich materiału, mogą być regene rowane za pomocą spawania, lutowania, klejenia, wulkanizacji.
Podstawową metodą regeneracji części zużytych materiałowo jest napawa-nie, czyli nakładanie warstwy ciekłego metalu na regenerowany obiekt, przy czym przetapiany jest materiał rodzimy części. Jest to rodzaj spawania, lecz celem jego nie jest uzyskanie trwałego połączenia dwóch części, a nałożenie na regenerowaną powierzchnię warstwy metalu (napoiny). Napawaniem regeneruje się ok. 65%

235
części zakwalifikowanych do odnowy. Do napawania można używać stopu o wła-ściwościach podobnych lub innych (lepszych) niż właściwości materiału części napawanej, np. w celu zwiększenia odporności na ścieranie lub korozję. W zależ-ności od stopnia automatyzacji procesy napawania dzieli się na ręczne, półauto-matyczne i automatyczne. Napawanieręczne – w łuku elektrycznym lub w pło-mieniu acetylenowo-tlenowym – stosuje się do regeneracji elementów dużych, o nieregularnych kształtach oraz zużytych w sposób specyficzny (np. wyszczerbie-nie zęba koła zębatego, wyszczerbienie wieńca koła pasowego, zużycie elementów roboczych pracujących w glebie – rys. 7.12).
Rys. 7.12. Zregenerowane przez napawanie zęby koparki.Źródło: http://swidnik.lento.pl/napawanie-regeneracja-maszyn-urzadzen
Do typowych części, regenerowanych za pomocą napawania półautomatycz-nego (automatycznie podawany jest drut, elektroda lub taśma), należą koła bie-gowe dużych rozmiarów, ślimaki, wały – rys. 7.13.
Rys. 7.13. Nałożona napoina na wał z wykorzystaniem napawania łukowego, taśmowego.Źródłó: http://www.elkrem.com.pl

236
Metealizacja natryskowa, plazmowa (rys. 7.14) – w metodzie tej znaj-duje zastosowanie środek natryskowy w postaci proszku, który zostaje w lub poza pistoletem stopiony przez strumień plazmy i skierowany na podłoże. Pla-zma wytworzona zostaje przez łuk elektryczny, zogniskowana spala się w argonie, helu, azocie, wodorze lub w mieszance tych gazów. W tym procesie gazy ulegają dysocjacji i jonizacji, uzyskują wysokie prędkości wypływu i w trakcie rekombi-nacji oddają swoją energię cieplną cząsteczkom. Łuk elektryczny nie jest prze-nośny, to znaczy płonie w obrębie pistoletu pomiędzy wycentrowaną elektrodą (katodą), a, tworzącą anodę, chłodzoną wodą dyszą. Metodę stosuje się w nor-malnej atmosferze, w strumieniu gazu ochronnego, tzn. obojętnej atmosferze (np. argonie), w próżni lub pod wodą. Poprzez specjalnie uformowaną nakładkę na dyszę możliwe jest uzyskanie plazmy o dużej prędkości. Metoda znajduje zasto-sowanie między innymi w przemyśle lotniczym i lotach kosmicznych (np. łopaty turbin i powierzchni wlotowych), technologii medycznej (implanty), powłokach izolacyjnych.
Metalizacja płomieniowa, proszkowa (rys. 7.15) – dodatek natryskowy w postaci proszku roztapiany jest w płomieniu acetylenowo-tlenowym i rozpy-lony zostaje dzięki rozprężającym się gazom na spreparowaną powierzchnię. Jeżeli jest to konieczne, do nadania cząsteczkom przyspieszenia może zostać użyty dodatkowy gaz (np. argon lub azot). Różnorodność środka natryskowego obej-muje w przypadku proszków ponad 100 różnych surowców. Rozróżnia się proszki samopłynące oraz samoprzylegające. Proszki samopłynące potrzebują zwykle dodatkowej obróbki termicznej. Roztapianie następuje zwykle przy pomocy pal-ników acetylenowo-tlenowych. Poprzez proces cieplny przyczepność powłoki znacznie się zwiększa; powłoka staje się szczelna na gazy i ciecze. Zakresy zastoso-wania to na przykład tuleje, rolki do przenośników wałkowych, osadzenia łożysk, wentylatory, wirniki wytłaczarek ślimakowych itp.
Rys. 7.14. Pistolet do natryskiwania plazmowego: (1) gaz szlachetny, (2) woda chłodząca, (3) źródło prądu stałego, (4) sproszkowany środek, (5) katoda, (6) anoda, (7) podłoże.Źródło: Gemeinschaft Thermisches Spritzen e.V.

237
Rys. 7.15. Pistolet do natryskiwania gazowego: (1) acetylen/tlen, (2) zbiornik na proszek, (3) dysza, (4) gaz nośny + proszek, (5) płomień acetylenowo-tlenowy i cząsteczki, (6) pod-łoże.Źródło: Gemeinschaft Thermisches Spritzen e.V.
Napylanie powłok metodądetonacyjną (rys. 7.16) jest procesem napylania, gdzie tzw. działo detonacyjne składa się z dyszy wyjściowej, na końcu której znaj-duje się komora spalania. W komorze tej następuje zmieszanie się acetylenu, tlenu i proszku i poprzez zapalnik doprowadzenie tej mieszanki do wybuchu. Powstała w dyszy fala uderzeniowa nadaje prędkość cząsteczkom proszku, który na wylocie dyszy jest ogrzewany i z dużą prędkością wyrzucany z dyszy na uprzednio przygo-towane podłoże. Po każdej detonacji dysza i komora spalania płukana jest i czysz-czona azotem. Bardzo wysoka jakość powłok uzyskiwanych tą metodą w wielu przypadkach usprawiedliwia jej wysoki koszt. Przykłady zastosowań: tłoki w sprę-żarkach lub pompach, wirniki turbin parowych, turbiny sprężarek, walce maszyn papierniczych, kalandry itd.
Rys. 7.16. Schemat pistoletu do metalizacji detonacyjnej: (1) acetylen, (2) tlen, (3) azot, (4) proszek, (5) zapalnik, (6) dysza z chłodzeniem wodnym, (7) podłoże.Źródło: Gemeinschaft Thermisches Spritzen e.V.
W metalizacjinatryskowej, laserowej (rys. 7.17) środek w postaci proszku wprowadzony zostaje przy pomocy specjalnej dyszy w promień lasera. Przy pomocy lasera zarówno proszek, jak i minimalny odsetek powierzchni podłoża

238
(płaszczyzna mikroskopowa) zostają roztopione, a wykorzystany środek natry-skowy wiąże się z podłożem na płaszczyźnie metalurgicznej. W celu ochrony łaźni metalowej/jeziorka spawalniczego stosuje się gaz ochronny. Metoda ta znajduje zastosowanie między innymi w częściowym nakładaniu powłok na wykrojniki oraz narzędzia do gięcia oraz cięcia.
O wyborze sposobu regeneracji decydują wcześniej wymienione czynniki (technologiczne, techniczne, ekonomiczne i bezpieczeństwa). Zakładając, że ze względów bezpieczeństwa i technologicznie dana metoda jest dopuszczalna, kry-terium techniczno-ekonomiczne można sprawdzić, wykorzystując następujący warunek:
nr KZK ⋅≤ , gdzie:
Kr – koszt regeneracji części,Z – współczynnik trwałości,
n
r
TTZ = ,
Tr – trwałość części po regeneracji,Tn – trwałość części nowej,Kn – koszt części nowej.
Rys. 7.17. Schemat metalizacji laserowej: (1) promień lasera, (2) gaz ochronny, (3) pro-szek, (4) podłoże.Źródło: Gemeinschaft Thermisches Spritzen e.V.

239
7.2.7. MontażMontażem (procesem montażu) nazywa się całokształt wykonywanych
w określonej kolejności operacji, przy wykorzystaniu odpowiednich narzędzi, ustalenia gotowych części we wzajemnym po łożeniu, łączenia i mocowania w celu otrzymania podzespołów, zespołów lub mechanizmów, a następnie całej maszyny. W procesie montażu należy uwzględnić właściwości obróbki mechanicznej współ-działających części, do kładność ich wykonania, wymaganą dokładność łączenia w podzespoły i zespo ły oraz wymagania jakościowe dotyczące całego wyrobu.
Po zakończeniu montażu niektórych zespołów należy wykonać dodatkowe czynności takie, jak: regulacje, docieranie, wyważanie, poziomowanie, osiowanie.
Montaż maszyn ciężkich wiąże się z dodatkowymi trudnościami, wyni-kającymi z dużych wymiarów i mas montowanych elementów. W fazie przygo-towania do montażu trudności te to m. in. kłopotliwa obróbka otworów, które muszą być wiercone w kadłubach najczęściej ręcznie, o ile nie ma wiertarek pro-mieniowych o odpowiedniej długości ramion, z dotrzymaniem wymaganych warunków równoległości i prostopadłości dokładnie obrobionych płaszczyzn i otworów maszyn ciężkich. Również dokładność obróbki skrawaniem przed-miotów długich może być niewystarczająca. Technologia i organizacja montażu maszyn ciężkich zależy od przyjętego systemu transportu pionowego i po zio-mego. Stąd rozróżnia się montaż za pomocą napodłogowych urządzeń dźwigo-wych lub podsufitowych urządzeń dźwigowych.
7.2.8. Badania oraz odbiór maszyn i urządzeń po naprawieTa faza procesu technologicznego remontu ma na celu sprawdzenie, czy uzy-
skano wymaganą zdatność użytkową wyrobu (jakość) oraz czy został wykonany zakres wszystkich uprzednio ustalonych prac. Na przykład, po naprawach pojazdu mogą być wymagane dodatkowe badania [1]:
– skuteczności hamowania,– skuteczności funkcjonowania amortyzatorów,– geometrii zawieszenia,– analiza spalin.Przekazanie obiektu po naprawie wymaga zaprojektowania i wypełnienia
odpowiedniej dokumentacji. Mogą ją stanowić:– warunki gwarancji,– protokoły z badań,– część odbiorcza protokołu zdawczo-odbiorczego. Warto tutaj przypo-
mnieć, że w częściej zdawczej zakładaliśmy przewidywany zakres naprawy, koszt i termin. W tym przypadku wpisywany jest faktyczny zakres, koszt i data zakończenia naprawy, i przekazania dla użytkownika. O dobrej

240
organizacji pracy zakładu naprawczego świadczy mała różnica pomiędzy działaniem planowanym i faktycznie zrealizowanym,
– faktura lub rozliczenie wewnętrzne.W niektórych przypadkach wymagany jest odbiór maszyn i urządzeń po
naprawie przy udziale strony trzeciej, np. przez:– Urząd Dozoru Technicznego (po naprawie zbiorników ciśnieniowych lub
urządzeń dźwigowych),– Stacji Kontroli Pojazdów (po naprawach powypadkowych).
Literatura
1. Adamiec P., Dziubiński J., Filipczyk J. Technologia napraw pojazdów samocho-dowych. Wydaw. Politechniki Śląskiej, 2002.
2. Cypko J., Cypko E. Podstawy technologii i organizacji naprawy pojazdów mechanicznych. WKŁ – Warszawa 1982.
3. Klyus O., Michalski R., Tilipałow W. Procesy naprawy maszyn – teoria i prak-tyka. Wyd. UWM w Olsztynie, 2002.
4. Kostrzewa S., Nowak B. Podstawy regeneracji części pojazdów samochodowych. WKŁ – Warszawa 1979.
5. Legutko S. Podstawy eksploatacji maszyn i urządzeń. WSiP, Warszawa 2004.6. Orzełowski S. Technologia napraw i obsługi pojazdów samochodowych. WSiP,
Warszawa, 1987.7. Pod red. Niziński S., Michalski R. Utrzymanie pojazdów i maszyn. ITE, Radom
2007.

241
8. Logistyka w utrzymaniu maszyn
8.1. Definicja logistyki
Logistyka w literaturze definiowana jest najczęściej, zgodnie z definicją Coun-cil of Logistics, jako proces planowania, realizowania i kontrolowania spraw-nego i efektywnego ekonomicznie przepływu surowców, materiałów do produk-cji, wyrobów gotowych oraz odpowiedniej informacji, z punktu pochodzenia do miejsc konsumpcji, w celu zaspokajania potrzeb klienta. W niniejszej pracy logi-stykę potraktowano jako dziedzinę wiedzy o racjonalnym, kompleksowym i eko-nomicznym, materiałowo-energetyczno-informacyjnym zabezpieczeniu funkcjo-nowania systemów działania przy istniejących zasobach, ograniczeniach i zakłó-ceniach, w zadanych warunkach i czasie.
Utrzymanie ruchu maszyn są to działania mające na celu zabezpieczenie funk-cjonowania maszyn w zakresie ich zdatności (zdolności do realizowania zadań). Zatem stwierdzić można, że utrzymanie ruchu jest właśnie działaniem zabezpie-czającym (logistycznym) w stosunku do maszyn realizujących proces produk-cyjny. Procesy utrzymania ruchu obejmują między innymi wykonywanie napraw, przeglądów okresowych i obsług technicznych, które to procesy wymagają z kolei zabezpieczenia logistycznego w zakresie dostarczenia części zamiennych, mate-riałów smarnych itp., w wymaganym czasie, jakości i ilości.
8.2. Logistyka części zamiennych
Proces produkcji jest procesem złożonym. Można przyjąć, że składa się on z trzech podprocesów, z których tylko efektem wytwarzania są produkty (rys. 8.1). Pozostałe podprocesy to utrzymanie maszyn, celem którego jest zapewnienie zdatności maszyn oraz proces usprawniania, dotyczący wprowadzania mody-fikacji zarówno w procesie produkcyjnym, jak i w procesie utrzymania maszyn. Wszystkie te procesy powinny uwzględniać specyfikę produktu i eksploatowa-nych maszyn tak, aby jednostkowe koszty produkcji były jak najmniejsze.

242
Rys. 8.1. Proces produkcyjny.
Podobnie możemy przyjrzeć się procesowi utrzymania ruchu maszyn (rys. 8.2). W tym przypadku również możemy wyróżnić trzy podprocesy: przygotowa-nia (planowania) działań, wykonywania (realizacji) czynności obsługowo-napraw-czych oraz usprawniania. Efektem planowania jest terminarz prac, efektem wyko-nywania są zdatne maszyny, a ciągłe usprawnianie ma na celu opracowanie takiego planu obsług, aby zapewnić jak największą dostępność maszyn dla produkcji. Rów-nież tutaj niezbędna jest znajomość specyfiki obsługiwanych maszyn. Aby utrzy-manie maszyn nie pochłaniało zbyt dużych kosztów, należy prawidłowo gospoda-rować częściami zamiennymi, dbać, aby części, materiały i czynności obsługowe były zgodne z dokumentacją techniczną, a zakupy realizowano z odpowiednim wyprzedzeniem w stosunku do potrzeb i we właściwych ilościach.
Rys. 8.2. Proces utrzymania ruchu maszyn.

243
Problemy zarządzania częściami zamiennymiGospodarowanie częściami zamiennymi w przedsiębiorstwie napotyka na
szereg problemów związanych ze zbyt dużymi zapasami tych części, długim cza-sem dostaw niektórych części, utratą własności w trakcie przechowywania, bra-kiem niezbędnych informacji o częściach i materiałach eksploatacyjnych.
Zbyt duże stany magazynowe części związane są z niskim poziomem standa-ryzacji części pomiędzy różnymi producentami. Z tego względu brak jest wymien-ności części pomiędzy różnymi maszynami nawet w przypadku części z pozoru jednakowych. Wysoki poziom zapasów może być spowodowany również niedo-kładną analizą zapasów, głównie jeśli chodzi o ilość wydań i wartość zmagazyno-wanych części. Brak kontroli nad magazynami podręcznymi i brak ewidencji czę-ści pobranych z magazynu, a niewykorzystanych w naprawie również wpływa na zbyt wysoki poziom zapasów w magazynach.
Problem dotyczący długiego czasu dostaw związany jest głównie z częściami specjalnymi, produkowanymi przez jednego lub niewielką liczbę producentów. W takim przypadku oczekiwanie na część zamienną może wynosić kilka tygodni lub nawet miesięcy.
Należy zwrócić też uwagę na warunki przechowywania części zamiennych i materiałów eksploatacyjnych. Dotyczy to szczególnie materiałów smarnych, które, przechowywane w niewłaściwych warunkach (wilgoć), tracą swoje własno-ści, oraz części strategicznych (specjalnych) do maszyn krytycznych dla procesu produkcyjnego. Ze względu na długi czas dostawy, tego rodzaju części są prze-chowywane w magazynach przez długi okres czasu, a złe warunki przechowywa-nia mogą uniemożliwić późniejsze wykorzystanie tych części. Jest to szczególnie kosztowne, jeśli skutkuje przestojem całej linii produkcyjnej do chwili otrzymania części nowej.
Informacje o wymaganiach technicznych materiałów eksploatacyjnych i czę-ści zamiennych powinny w jasny sposób określać, jakie części należy kupować, aby uniknąć błędnych zakupów, powodujących powstawanie zapasów zbędnych (nie dających się wykorzystać).
Podstawowe trudności związane z zarządzaniem zapasami części zamiennych dotyczą:a) utrzymania równowagi pomiędzy:
– ilością części w magazynie,– kosztami utrzymania zapasów,
b) problemów decyzyjnych:– kiedy zamawiać?– jakie części zamawiać?– ile zamawiać jednorazowo?

244
Utrzymanie równowagi pomiędzy ilością części w magazynie a kosztami utrzymania generuje konflikt interesów pomiędzy wykonawcami prac obsługowo--naprawczych a pracownikami finansowo-księgowymi. Wykonawcy uważają, że wszystkie części są ważne i potrzebne, zatem wszystkie powinny być dostępne w magazynie. Księgowi natomiast uważają, że wszystkie części zamienne zgroma-dzone w magazynie generują koszty kapitałowe i zapasy należy ograniczać do nie-zbędnego minimum. Jeszcze inny aspekt stanowi wielkość jednorazowego zamó-wienia. Większe zamówienie często związane jest z większym rabatem w cenie jednostkowej.
Rozwiązaniem konfliktu powinno być takie gospodarowanie zapasami części zamiennych, aby zapewnić wymaganą dostępność części przy minimalnych zapa-sach. Wielkość zapasu powinna być ściśle związana z zapotrzebowaniem (popy-tem) na określone części.
W logistyce wyróżnia się dwa rodzaje zapotrzebowania [4]:– zapotrzebowanie zależne – zapotrzebowanie to ma związek z zapotrze-
bowaniem na dobra wyższego rzędu – można je wyliczyć, znając budowę i strukturę produktu wyższego rzędu,
– zapotrzebowanie niezależne – nie ma związku z zapotrzebowaniem na produkty wyższego rzędu – trzeba je prognozować.
Zapotrzebowanie zależne dotyczy procesu produkcji i jest podstawą do pla-nowania potrzeb materiałowych w produkcji (systemy MRP – Material Resource Planning).
Zapotrzebowanie niezależne dotyczy dystrybucji produktów.
W zaopatrywaniu w części zamienne i materiały eksploatacyjne większe zastosowanie znajduje zapotrzebowanie niezależne ze względu na losowy charak-ter występowania uszkodzeń. W takim przypadku trudno określić, kiedy i jaka część zamienna będzie potrzebna do wykonania naprawy.
Metody prognozowania zapotrzebowania (popytu) niezależnego można podzielić na [4]:a) metody oparte na tzw. szeregach czasowych, gdzie prognozowane zapotrze-
bowanie jest funkcją wcześniej zarejestrowanych wartości zapotrzebowania, przy czym rejestracja ta ma miejsce w określonych odstępach czasu (np. dzień, tydzień, miesiąc, kwartał),
b) metody prognozowania przyczynowo-skutkowego, będące równaniami regre-sji pojedynczej lub wielokrotnej, w zależności od liczby zmiennych objaśniają-cych.

245
Przy korzystaniu z metod opartych na szeregach czasowych, przy wyborze metody należy zwrócić uwagę, czy prognozowane zapotrzebowanie wykazuje trend, czy nie wykazuje trendu. W przypadku zapotrzebowania niewykazującego trendu można stosować metody proste, jak na przykład:
– średnia arytmetyczna,– średnia arytmetyczna ruchoma,– średnia arytmetyczna ruchoma ważona,
lub nieco bardziej skomplikowane, jak np. jednoparametryczne wygładzanie wykładnicze.
Dla zapotrzebowania wykazującego trend można skorzystać z metody dwupa-rametrycznego wygładzania wykładniczego. Szczegółowy opis ww. metod czytel-nik znajdzie w literaturze problemu [1, 2, 3, 4, 5].
8.3. Klasyfikacja części zamiennych i materiałów eksploatacyjnych w aspekcie logistyki
W utrzymaniu maszyn wykorzystuje się szeroki wachlarz części zamiennych i materiałów eksploatacyjnych. Zakres wykorzystywanych części zamiennych sięga od drobnych części, tanich w zakupie i zużywanych w dużych ilościach do całych podzespołów o dużej wartości, których zużycie przy wykonywaniu napraw jest sporadyczne. Poprawne gospodarowanie częściami zamiennymi wymaga podziału wykorzystywanych w przedsiębiorstwie części i materiałów na odpo-wiednie kategorie.
Jednym z kryteriów podziału jest standaryzacja części. Przystępując do kate-goryzacji części, należy, opierając się na dokumentacji technicznej, dokonać dekompozycji obiektu na zespoły, zespołów na podzespoły a podzespołów na czę-ści i przyporządkować wszystkie części do jednej z kategorii:
– części specjalne – stosowane w maszynach określonego typu i niewy-mienne z innymi maszynami; części tej kategorii najczęściej produkowane są przez producenta maszyn lub jego kooperantów; ograniczona liczba producentów sprawia, że części te są drogie i czas ich dostawy może być długi,
– części standardowe – są to części typowe, zgodne z normami, produko-wane przez wielu niezależnych producentów, wymienne pomiędzy róż-nymi maszynami i producentami; przykłady tego rodzaju części to łożyska toczne, pasy napędowe, uszczelnienia itp.,
– materiały eksploatacyjne – są to materiały jednorazowego użytku, o niskiej wartości jednostkowej.

246
Innym kryterium podziału jest kryterium wielkości zużycia danej części lub materiału. Wyróżnia się tutaj:
– części wolno-rotujące,– części szybko-rotujące.
Do grupy części wolno-rotujących zalicza się części specjalne (strategiczne). Grupa ta charakteryzuje się dużą nieregularnością wydań, wysoką wartością jed-nostkową i długim czasem dostawy. Jednocześnie brak tych części w magazynie może powodować duże straty związane z przestojami maszyn istotnych dla reali-zacji produkcji. Ta grupa części sprawia problemy związane z decyzją: zamawiać czy nie zamawiać? Zamawiane są zazwyczaj w małych ilościach lub jednostkowo.
Grupa części szybko-rotujących charakteryzuje się wysoką regularnością wydań, niską ceną jednostkową, krótkim czasem dostawy, a ich brak w magazynie nie powoduje wysokich kosztów. Do grupy tej zalicza się głównie materiały eks-ploatacyjne, a ze względu na duże i regularne wydania i niskie koszty, zamawia się je w dużych partiach.
Podział wykorzystywanych części na kategorie i ich analiza służy wyborowi części do przechowywania w magazynach i pozwala na obniżenia kosztów zapa-sów poprzez unikanie magazynowania tych samych części (standardowych) pod różnymi nazwami. Uzyskać można w takim przypadku obniżenie liczby pozy-cji magazynowych, co ułatwia obsługę magazynu i skraca czas obsługi zlecenia naprawy. Identyfikacja części standardowych pozwala na dopuszczenie zakupów od wielu dostawców, co korzystnie wpływa na uzyskiwane ceny.
Dla potrzeb systemu informatycznego zaleca się opracować i wdrożyć system kodyfikowania części, co pozwoli na łatwe wyszukiwanie i identyfikowanie części zamiennych i materiałów. Nadawany kod powinien jednoznacznie identyfikować część i uniemożliwić pomyłki przy wydawaniu części do naprawy.
Zalecana kolejność działań przy kodyfikacji powinna być następująca:– ograniczenie kodyfikacji do części standardowych i materiałów eksploata-
cyjnych,– ustalenie procedury i zespołu kodyfikującego,– opracowanie systemu kodyfikowania,– ustalenie i udostępnienie bazy danych kodów,– oznaczenie i skodyfikowanie części,– wprowadzenie informacji (danych) do systemu informatycznego.
Zalecana jest następująca kolejność oznaczania części dla nowej maszyny:– identyfikacja części (dekompozycja maszyny),– sporządzenie listy części specjalnych i standardowych,– sprawdzenie prawidłowości oznaczenia części standardowych,

247
– sprawdzenie prawidłowości oznaczenia części specjalnych.
Oprócz klasyfikacji i kodyfikacji wykorzystywanych części należy również dokonać analizy istniejących zapasów.
Analizę istniejących zapasów przeprowadza się pod względem wartościowym i ilościowym. Celem analizy wartościowej jest identyfikacja grupy części zamien-nych i materiałów o dużej wartości celem późniejszego zracjonalizowania zaku-pów części drogich i ograniczenia kosztów kapitałowych związanych z tą grupą części. Analiza ilościowa pozwala na identyfikację grupy części zużywanych regu-larnie i w dużych ilościach, co pozwoli na uzyskiwanie lepszych cen na części zamawiane w dużych ilościach.
Podstawową metodą stosowaną w analizie wartościowej i ilościowej zapa-sów jest metoda ABC/XYZ. Metoda ta dzieli materiały na trzy grupy A,B i C pod względem wartości oraz na trzy grupy X, Y i Z pod względem regularności wydań [3, 4, 6, 8].
Podstawą podziału na grupy A, B, C jest zasada Pareto, w myśl której 80% skutków (kosztów) jest generowane przez 20% przyczyn (asortymentu części). Zgodnie z zasadą Pareto cały asortyment części dzieli się na trzy grupy (rys. 8.3) [3, 4, 6, 8]:
– grupa A – kumuluje 70% do 80% wartości zużywanych części – grupę tę stanowi do 20% asortymentu części,
– grupa B – kumuluje 15% do 20% wartości zużywanych części – grupę tę stanowi ok. 30-40% asortymentu części,
– grupa C – kumuluje 5% do 10% wartości zużywanych części – grupę tę stanowi ok. 40-50% asortymentu części.
W stosunku do części z grupy A stosuje się dokładne określanie wielkości zamówień i dostępności, dążąc do zasady Just In Time (dokładnie na czas). Dla pozostałych grup, a zwłaszcza grupy C, stosuje się liberalne podejście do wielkości zamówienia.
Dzięki analizie ABC rocznego zużycia części i materiałów eksploatacyjnych można wyróżnić 20% pozycji znajdujących się w magazynie, których kontrola zapewnić może kontrolę 80% rocznych kosztów materiałowych.

248
Rys. 8.3. Analiza ABC wartości zapasów [6].
Metodę ABC rozszerza się o zagadnienie regularności zużycia materiałów (metoda XYZ). Podstawą metody XYZ jest podział materiałów na grupy [3, 4, 6]:1) X – zużycie materiałów, dla których regularne wahania są mniejsze od 20%
stałego zużycia. Nie są potrzebne wysokie zapasy bezpieczeństwa.2) Y – zużycie materiałów zmienne na skutek sezonowości, wahania od 20% do
50% stałego zużycia. Konieczne jest utrzymanie określonego zapasu magazy-nowego.
3) Z – bardzo nieregularne zużycie materiałów, wahania wynoszą 50% i więcej stałego zużycia. Niska wiarygodność prognozy zużycia materiałów.
Podziału na grupy X, Y, Z można dokonać na podstawie współczynnika zmienności, będącego stosunkiem odchylenia standardowego do wartości śred-niej zużycia. Im wartość współczynnika zmienności jest bliższa zeru, tym bardziej regularne jest zużycie części.
W wyniku zastosowania analizy ABC/XYZ uzyskamy podział asortymentu magazynowego na 9 grup o zróżnicowanych kosztach materiałowych i różnej dokładności prognozowania (tab. 8.1), dla których zaleca się stosowanie zróżnico-wanych wielkości zapasów i różnych strategii uzupełniania zapasu.
Udziały ilościowe w %
Udz
iału
war
tośc
iow
e w
%
~30-40%
~20%
~15
- 20%
~5-1
0%
~70-
8 0%

249
tabela 8.1. Cechy charakterystyczne grup zapasów wg analizy ABC/XYZ [6].
Grupa materiałów A B C
X Koszty materiałowe – dużeDokładność prognozo-wania – wysoka
Koszty materiałowe – średnieDokładność prognozo-wania – wysoka
Koszty materiałowe – małeDokładność prognozo-wania – wysoka
Y Koszty materiałowe – dużeDokładność prognozo-wania – średnia
Koszty materiałowe – średnieDokładność prognozo-wania – średnia
Koszty materiałowe – małeDokładność prognozo-wania – średnia
Z Koszty materiałowe – dużeDokładność prognozo-wania – niska
Koszty materiałowe – średnieDokładność prognozo-wania – niska
Koszty materiałowe – małeDokładność prognozo-wania – niska
Zastosowanie analizy ABC/XYZ pozwala wyróżnić grupy zapasów, w sto-sunku do których można zastosować różne strategie zamawiania. Dla potrzeb służb utrzymania ruchu każda część zamienna jest ważna z punktu widzenia pro-wadzonej naprawy (brak właściwego łożyska uniemożliwi usunięcie uszkodze-nia), ale od strony finansowej największą troską otacza się materiały z grup AX, AY, AZ, BX i BY, które kumulują ponad 90% kosztów materiałowych, stanowiąc jednocześnie ok. 30% kupowanych materiałów.
W stosunku do grup AX, AY, BX, BY zaleca się stosować częste zakupy małych partii i dbałość o terminowość dostaw.
Części zamienne z grupy AZ można zamawiać, stosując strategię “jeden za jeden”, tzn. zamówienie jest składane po wydaniu części z magazynu, gdyż praw-dopodobieństwo ponownego wystąpienia zapotrzebowania na tę część w krótkim odstępie czasu jest niskie. Prawdopodobieństwo to rośnie wraz z upływem czasu od wykorzystania tej części przy usuwaniu uszkodzenia.
Dla grupy CZ z powodu małych kosztów materiałowych i niskiej dokładności prognozowania można uzupełniać zapasy raz na kwartał.
Dla pozostałych grup należy stosować strategie zamawiania oparte o poziom informacyjny zapasu lub przegląd okresowy, utrzymując rutynowe zapasy bezpie-czeństwa.

250
8.4. Podstawy sterowania zapasami
8.4.1. Struktura zapasówZapasy każdej pozycji magazynowej można podzielić na część rotującą i nie-
rotującą (rys. 8.4). Część rotująca to zapas związany z bieżącym zapotrzebowa-niem wynikającym z normalnego zużywania (wydawania) zapasu. Zauważyć należy, że średnia wartość zapasu rotującego w wybranym okresie jest równa połowie średniej wielkości dostaw w tym okresie. Część nierotująca jest zazwy-czaj zapasem zabezpieczającym, utrzymywanym na wypadek nagłego zwiększenia zapotrzebowania lub opóźnienia dostaw. Z różnych przyczyn w części nierotują-cej znajduje się część nadmierna zapasu, generująca koszty, a nie wnosząca żad-nej wartości. Należy zwrócić uwagę na to, że nierotowanie zapasu bezpieczeństwa traktuje się w kategoriach ewidencyjnych, a nie fizycznych. Fizycznie bowiem wszystkie zapasy muszą przepływać przez magazyn, aby uniknąć utraty ich wła-sności na skutek zbyt długiego przechowywania.
Rys. 8.4. Struktura zapasu [4].
Celem zarządzania zapasami jest [4]:– optymalne (ekonomiczne) kształtowanie zapasu rotującego,– wyznaczanie uzasadnionego zapasu zabezpieczającego,– eliminowanie zapasu nadmiernego.
Konsekwencje związane z nadmiarem i niedoborem zapasów części zamien-nych przedstawiono na rysunkach 8.5 i 8.6. W jednym i drugim przypadku kon-sekwencje mają naturę finansową.

251
Rys. 8.5. Konsekwencje związane z nadmiarem zapasów.
Rys. 8.6. Konsekwencje związane z niedoborem zapasów.
8.4.2. Koszty zapasówZ ekonomicznego punktu widzenia koszty stanowią najważniejszy element
analizy efektywności funkcjonowania systemów zaopatrywania. Przyjmując jako kryterium miejsca powstawania kosztów, wyróżniamy [3]:
– koszty zamawiania,– koszty utrzymania zapasu,– koszty braku zapasu,– koszty transportu.

252
Koszty zamawiania mogą być [2, 3, 8]:– stałe – niezależne od wielkości partii dostaw i związane głównie z przygo-
towaniem i złożeniem zamówienia,– zmienne – związane bezpośrednio z wielkością i rodzajem asortymentu
dostarczanej partii.
Koszty utrzymania zapasu dzielimy na trzy grupy: finansowania, magazyno-wania i starzenia się zapasów.
Koszty finansowania zapasów są wynikiem oprocentowania kredytów na zapasy, a ich wielkość zależy od poziomu zapasów finansowanych kredytem i stopy oprocentowania.
Koszty magazynowania również można podzielić na koszty stałe i zmienne. Koszty stałe zależą od wielkości zapasu i wynikają z kosztów energii elektrycz-nej, kosztów ogrzewania magazynu, amortyzacji środków trwałych, wynagrodzeń personelu zatrudnionego w magazynie itp. Część zmienna zależy od wielkości przechowywanego zapasu. Są to m.in. koszty konserwacji, koszty robocizny itd.
Koszty starzenia mogą być związane z naturalnymi ubytkami zgromadzo-nych zapasów lub utratą wartości użytkowej. Koszty te mogą również wynikać z konieczności zagospodarowania zapasów nadmiernych lub nieprawidłowych (koszty odsprzedaży, złomowania, utylizacji).
Koszty braku zapasu wynikają z przestojów maszyn w oczekiwaniu na części zamienne lub materiały eksploatacyjne. Zalicza się tu również koszty zamówień interwencyjnych i nagłych.
Koszty transportu związane są z transportowaniem zapasów i również mogą być podzielone na część stałą i zmienną. Część stała wynika z opłat ponoszonych na wynajęcie lub utrzymania środków transportu, część zmienna zaś zależy od wielkości partii, odległości (np. zużycie paliwa), czasu transportu itp.
Najbardziej istotne koszty związane są z utrzymaniem zapasu i brakiem zapasu. Wraz ze wzrostem poziomu zapasu koszty utrzymania zapasu rosną, nato-miast koszty braku zapasu maleją (rys. 8.7). Celem optymalizacji jest ustalenie takiego poziomu zapasu, dla którego koszty całkowite związane z tym zapasem będą minimalne.

253
Rys. 8.7. Zmiany kosztów utrzymania zapasów i braku zapasów [3].
Działania optymalizacyjne mogą dotyczyć wyboru wielkości dostaw, organi-zacji funkcjonowania systemu, sterowania eksploatacją maszyny, a tym samym sterowania ilością zużywanych części i materiałów oraz kształtowania optymal-nego poziomu zapasów.
8.4.3. Podstawowe modele sterowania zapasami
Model Wilsona
Model Wilsona (model piły) dotyczy przypadku, w którym strumienie dostaw i zapotrzebowań na określony asortyment są zdeterminowane i stałe w czasie (rys. 8.8). Model ten bazuje na następujących założeniach [3]:1) zamawianym materiałem jest pojedynczy produkt,2) wielkość popytu jest stała, powtarzalna i znana,3) czas dostawy towaru liczony od chwili złożenia zamówienia do otrzymania
zamówionej partii jest stały i znany,4) nie są dozwolone przypadki wyczerpania się zapasów,5) towary są zamawiane i dostarczane do magazynów w określonych partiach,6) przyjmuje się następującą strukturę kosztów:
– koszt jednostki towaru jest stały,– koszty utrzymania zapasów zależą liniowo od średniego poziomu zapa-
sów,– koszty składanych zamówień są stałe dla każdej zamawianej partii zapasu
(niezależnie od jej wielkości).

254
Rys. 8.8. Zmiany stanu zapasów w modelu Wilsona (Q – wielkość dostawy, t – czas dostawy) [3].
Wielkość dostawy w tym modelu wynika z optymalizacji kosztów całkowitych związanych z zapasem i wyliczana jest z zależności:
(8.1)
gdzie:Qopt – optymalna wielkość dostawy (Ekonomiczna Wielkość Dostawy),R – zapotrzebowanie całkowite w rozpatrywanym okresie,kz – koszt związany z przygotowaniem i obsługą jednego zamówienia i wynikają-
cej z niego dostawy,km – koszt utrzymania jednostki zapasu w przyjętym okresie; przyjmuje się, że
stanowi on pewien ułamek wartość zapasu.
Wiedząc, że km=k*c, zależność tę można przedstawić jako:
(8.2)
gdzie:Qopt – optymalna wielkość dostawy (Ekonomiczna Wielkość Dostawy),R – zapotrzebowanie całkowite w rozpatrywanym okresie,kz – koszt związany z przygotowaniem i obsługą jednego zamówienia i wynikają-
cej z niego dostawy,k – okresowy współczynnik kosztu utrzymania zapasu, (na ogół przyjmowany
z przedziału 0,2 – 0,4),c – cena jednostkowa zamawianego towaru.
W warunkach rzeczywistych obliczoną w ten sposób optymalną wielkość dostawy należy traktować jako wartość orientacyjną i dostosować ją do ładow-
m
zopt k
kREWDQ ⋅⋅==
2
ckkRQ z
opt ⋅⋅⋅
=2

255
ności środka transportu, możliwości magazynowych itp., pamiętając jednak, że koszty mogą być nieco większe.
Model oparty o poziom informacyjny zapasu
Model oparty o poziom informacyjny jest jednym w podstawowych modeli odnawiania zapasu. Cechą charakterystyczną tego modelu jest to, że złożenie zamówienia następuje wtedy, gdy poziom zapasu spadnie poniżej określonego poziomu nazywanego poziomem informacyjnym lub punktem składania zamó-wienia (ang. Reorder Point).
Założenia dotyczące tego modelu są następujące [4]:– zamówienie jest akceptowane przez dostawcę w dowolnym momencie,– po każdej transakcji magazynowej znany jest poziom zapasu,– zamówienie zostaje złożone wtedy, gdy po kolejnym wydaniu części
z magazynu stan zapasu jest mniejszy od ustalonego poziomu informacyj-nego,
– zamówienia są składane w stałej wielkości, wyznaczonej z zależności na ekonomiczną wielkość zamówienia.
Ogólny schemat przebiegu procesu odnawiania zapasu w systemie opartym o poziom informacyjny przedstawia rys. 8.9.
Rys. 8.9. Schemat procesu odnawiania zapasu w systemie opartym o poziom informa-cyjny zapasu [4].

256
Model ten wymaga ustalenia dwóch wielkości [4]:– wielkości dostawy (najczęściej EWD – Ekonomiczna Wielkość Dostawy),– poziomu informacyjnego zapasu.
Poziom informacyjny zapasu powinien uwzględniać średnie zapotrzebowanie w czasie realizacji zamówienia oraz zapas bezpieczeństwa. Oblicza się go z zależ-ności:
(8.3)
gdzie:P – zapotrzebowanie w przyjętej jednostce czasu (np. dzień, tydzień),T – czas realizacji zamówienia (w tych samych jednostkach),ZB – zapas zabezpieczający.
Zaletą tej metody jest jednorazowe ustalenie poziomu informacyjnego zapasu i wielkości zamówienia dla całego przedziału czasu, w którym wahania zapotrze-bowania i wahania czasu dostawy nie różnią się od wartości średniej. Wadą jest konieczność bieżącego kontrolowania stanu zapasu w celu ustalenia chwili złoże-nia zamówienia.
Metodę tę można stosować również do sterowania zapasami materiałów eks-ploatacyjnych, których zużycie można opisać strumieniem zdeterminowanym. Natomiast w przypadku części zamiennych, których zużycie jest opisane strumie-niem losowym, stosowanie tej metody zwiększa ryzyko błędu.
Model oparty o przegląd okresowy (stałego okresu zamawiania)
Drugi z podstawowych modeli odnawiania zapasu to model oparty o przegląd okresowy. Jego zasadniczą cechą jest to, że zamówienie jest składane w określo-nym cyklu o stałym okresie, przy czym zmienna jest wielkość zamówienia. Wiel-kość zmówienia jest wyznaczana jako różnica pomiędzy poziomem maksymal-nym zapasu a poziomem zapasu w chwili składania zamówienia (rys. 8.10).

257
Rys. 8.10. Schemat procesu odnawiania zapasu w modelu opartym o przegląd okresowy: WD – wielkość dostawy (równa wielkości zamówienia), Tc – okres przeglądu magazyno-wego, T1, T2, T3 – czasy realizacji poszczególnych dostaw [4].
Model ten jest realizowany przy następujących założeniach [4]:– przegląd zapasu jest przeprowadzany w stałym cyklu równym Tc; wykona-
nie przeglądu jest jednoznaczne ze złożeniem zamówienia,– w czasie przeglądu ustala się aktualny poziom zapasu,– zamówienie jest złożone w wielkości równej różnicy pomiędzy zapasem
maksymalnym a aktualnym poziomem zapasu,– dostawa jest realizowana po czasie Ti.
Podstawowym parametrem systemu opartego o przegląd okresowy jest wiel-kość zapasu maksymalnego oraz cykl przeglądów magazynowych.
Obliczenie zapasu maksymalnego uwzględnia zarówno średnie zapotrzebo-wanie w czasie realizacji dostawy i cyklu przeglądu magazynowego, jak i zapas bezpieczeństwa. Zapas maksymalny oblicza się z zależności [4]:
(8.4)
gdzie:P – zapotrzebowanie w przyjętej jednostce czasu (np. dzień, tydzień),T – czas realizacji zamówienia (w tych samych jednostkach),Tc – okres przeglądu magazynowego,ZB – zapas zabezpieczający.
Okres przeglądu magazynowego można określić z zależności:
T3T2T1
WD WDWD
TC TC
T
Zmax

258
(8.5)
gdzie:t – czas wyrażony w odpowiednich jednostkach (52 tyg. lub 365 dni),Qopt – optymalna wielkość dostawy,R – roczna wielkość zapotrzebowania.
Zaletą tej metody jest to, że jeśli u jednego dostawcy zamawia się kilka asor-tymentów części zamiennych, to można tak dobrać terminy zamawiania, aby jedna dostawa obejmowała wszystkie asortymenty, co pozwala osiągnąć lepsze wykorzystanie środków transportu, a tym samym obniżenie kosztów. Wadą jest konieczność każdorazowego obliczania wielkości zapotrzebowania na podstawie popytu w ostatnim cyklu zamawiania oraz ścisłe przestrzeganie terminów kolej-nych zamówień.
Model oparty o rozkład prawdopodobieństwa uszkodzeń
Model ten stosowany jest dla części bardzo wolno rotujących i o dużej war-tości. Ponieważ zapotrzebowanie na nie wynika z intensywności uszkodzeń, jest ono bardzo nieregularne. Ze względu na losowe zapotrzebowanie, w tym przy-padku nie sprawdzają się opisane modele matematyczne.
Stosując ten model, określa się prawdopodobieństwo powstania zapotrzebo-wania na daną część w poszczególnych okresach, od momentu ostatniego wyda-nia począwszy.
Stosowanie modelu powinno poprzedzić wszechstronne badanie rozkładu prawdopodobieństwa uszkodzeń, aby dobrać właściwy rozkład.
Przykładowe możliwości zastosowania poszczególnych typów rozkładów do określania zapasów części zamiennych do pojazdów mechanicznych zestawiono w tabeli 8.2.
tabela 8.2. Możliwości zastosowania typowych rozkładów prawdopodobieństwa do usta-lania zapasów części zamiennych do pojazdów [7].
Rozkład prawdopodobień-stwa uszkodzeń Podzespoły pojazdu
Poissona chłodnice, wały korbowe, wałki rozrządu, mosty napę-dowe
Weibulla mosty napędowe, resory, skrzynie biegów, półosie napę-dowe, przeguby
Logarytmo-normalny i normalny
przewody paliwowe, wały Cardana, sprzęgła, mosty napę-dowe
RQt
T optc
⋅=

259
Jeśli konkretny rozkład prawdopodobieństwa uszkodzeń nie jest znany, to w przypadku części zamiennych bardzo wolno rotujących, ze względu na losowe występowanie zapotrzebowania, zalecane jest stosowanie rozkładu Poissona, któ-rym można opisać taki charakter zużycia.
Wybór modelu sterowania zapasami
Wybór modelu sterowania zapasami części zamiennych i materiałów eks-ploatacyjnych zależy od tego, czy dana część jest zaliczana do części wolno- czy szybko-rotujących, czy jest to część standardowa, specjalna, czy należy do kate-gorii materiałów eksploatacyjnych. Należy wziąć również pod uwagę regularność zużycia części i strategię eksploatacji maszyny, do której dana część jest wykorzy-stywana.
W tabeli 8.3 zestawiono zalecane modele kontroli zapasów, zależne od tych czynników.
tabela 8.3. Zalecane modele kontroli zapasów części zamiennych i materiałów eksploata-cyjnych.
Klasa części
Regularność zużycia Kategoria części Strategia
utrzymaniaZalecany model
kontroli zapasów
szybko rotujące
regularne materiał eksploata-cyjne części spe-cjalne części standardowe
planowo zapobiegawcza
oparty o poziom infor-macyjny – części drogieoparty o przegląd okre-sowy – części tanie
nieregularne specjalnestandardowe
wg stanudo uszkodzenia
oparty o poziom infor-macyjny – części drogieoparty o przegląd okre-sowy – części tanie
wolno rotujące
regularne specjalnestandardowe
planowo zapobiegawcza
oparty o poziom infor-macyjny – części drogieoparty o przegląd okre-sowy – części tanie
nieregularne specjalnestandardowe
wg stanudo uszkodzenia
oparty na rozkładach prawdopodobieństwa uszkodzeń – części drogieoparty o przegląd okre-sowy – części tanie

260
bardzo wolno rotujące
bardzo nieregularne i małe zużycie
części strategiczne(drogie)
wg stanudo uszkodzenia
oparty na rozkładach prawdopodobieństwa uszkodzeń
oparty o porównanie kosztów utrzymania zapasu i kosztów braku zapasu
bardzo nieregularne i małe zużycie
części strategiczne (tanie)
wg stanudo uszkodzenia
ze względu na niski koszt utrzymania zapa-sów i wysokie koszty braku zapasów te czę-ści powinny być zawsze dostępne w magazynie
Przy stosowaniu modelu opartego o poziom informacyjny zapasu należy uwzględniać charakter zużycia części i ich koszty jednostkowe. I tak:
– wysokie koszty zakupu części i niski do średniego poziom zużycia – zaleca się składać kilka zamówień w roku (duży zapas daje duże koszty utrzyma-nia),
– średnie koszty zakupu i średni do wysokiego poziom zużycia – zalecany jest wyższy poziom zapasu – podwyższyć punkt składania zamówienia,
– niskie koszty zakupu i wysoki poziom zużycia – zbyt duża liczba zamó-wień może podnieść koszty zamawiania – zaleca się składać jedno duże zamówienie.
Poprawne zastosowanie modelu wymaga:– określenia średnich kosztów zamawiania i utrzymania dla każdego arty-
kułu,– na tej podstawie określenie ekonomicznej wielkości zamówienia (EWZ)
dla każdego artykułu,– obliczenia ilości dostaw w roku, bazując na średnim zużyciu,– ustalenia poziomu obsługi i współczynnika bezpieczeństwa,– obliczenia poziomu zapasu bezpieczeństwa i punktu składania zamówie-
nia,– wprowadzenia tych parametrów do programu kontroli zapasów.
Kolejność działań przy stosowaniu modelu opartego o przegląd okresowy jest następująca:
– dobór okresu przeglądu magazynowego, bazując na danych działu zaku-pów lub obliczyć na podstawie liczby zamówień w roku,

261
– ustalenie poziomu obsługi i współczynnika bezpieczeństwa,– obliczenie poziomu zapasu bezpieczeństwa i punktu składania zamówie-
nia,– wprowadzenie tych parametrów do programu kontroli zapasów,– przeprowadzanie regularnych przeglądów magazynowych, co jest
konieczne do prawidłowego działania modelu.
Przy stosowaniu modelu opartego o rozkład prawdopodobieństwa uszkodzeń należy podjąć decyzję: „zamawiać czy czekać?” na podstawie oszacowanego praw-dopodobieństwa wystąpienia zapotrzebowania na daną część, co jest tożsame z wystąpieniem uszkodzenia danej części. Prawdopodobieństwo to zwiększa się wraz z upływem czasu od chwili zamontowania części nowej. Począwszy od ostat-niego wydania części, należy zdecydować, ile części będzie potrzebnych w ciągu miesiąca, 3 miesięcy, 6 miesięcy czy roku na podstawie stanu zapasu i prawdopo-dobieństwa wystąpienia zapotrzebowania. Stosowanie tego modelu wymaga:
– sporządzenia listy części, na które zapotrzebowanie odpowiada wybra-nemu rozkładowi,
– ustalenia daty ostatnich wydań dla każdej części,– ustalenia czasu realizacji zamówienia dla każdej części (może on być długi
w przypadku części specjalnych),– określić prawdopodobieństwo wystąpienia zapotrzebowania (uszkodze-
nia) i podjąć decyzję o zamówieniu w takim momencie, aby część znajdo-wała się w magazynie wtedy, gdy prawdopodobieństwo wystąpienia zapo-trzebowania osiągnie ustaloną wartość.
8.5. Podstawowe techniki zarządzania łańcuchem dostaw części zamiennych i materiałów eksploatacyjnych
Celem stosowania odpowiednich technik zarządzania łańcuchem dostaw jest ciągłe poszukiwanie oszczędności związanych z zapasami. Oszczędności te można uzyskać poprzez zmniejszenie poziomu zapasów przy zachowaniu poziomu obsługi gwarantującego wymaganą dostępność części w magazynie. Można prze-rzucać koszty związane z zapasami na dostawców lub też płacić tylko za materiały rzeczywiście zużywane. Poniżej przedstawiono wybrane techniki zarządzania łań-cuchem dostaw, które mogą przynieść takie efekty.

262
Negocjacje z dostawcami części oryginalnych
Producent maszyny, chcąc sprzedać swój produkt, musi konkurować z innymi producentami obecnymi na rynku. Konkurencja obejmuje między innymi cenę maszyny. Obniżając cenę, sprzedawca zmniejsza swoją marżę. Niską marżę ze sprzedaży próbuje w czasie eksploatacji zrekompensować sobie cenami oryginal-nych części zamiennych (sprzedawanych pod marką producenta maszyny). Czę-ści te są w wielu przypadkach produkowane przez zakłady produkcyjne koope-rujące z wytwórcą maszyny. Zakłady te mogą udostępniać na rynku takie same części, jakie dostarczają wytwórcy maszyny, jednak pod swoją lub inną marką. W takim przypadku jakość tych części jest porównywalna z oryginalnymi, a cena niższa. Warto również penetrować rynek w poszukiwaniu zamienników, czyli części produkowanych przez przedsiębiorstwa niezwiązane z wytwórcą maszyny. Należy jednak liczyć się z niższą jakością takich części i porównywać ceny, jakość i warunki dostaw. Można posłużyć się wskaźnikiem cena/jakość w celu dokonania wyboru. W ostateczności należy pozwolić klientowi zdecydować, jakie części chce stosować. Taka sytuacja powinna mieć miejsce, gdy utrzymanie ruchu jest świad-czone jako usługa przez firmę zewnętrzną (outsourcing utrzymania ruchu).
Zapas deponowany
Ta technika zarządzania zapasami polega na tym, że dostawca pozostawia w depozycie u użytkownika zapas często wykorzystywanych części i materiałów eksploatacyjnych. Zapas o odpowiedniej wielkości jest dostarczany do odbiorcy i u niego pozostawiony. Odbiorca korzysta z zapasu, prowadząc ewidencję pobrań. Każde pobranie powinno być udokumentowane numerem zlecenia naprawy, datą pobrania, powinno również określać ilość i typ pobranej części.
Dostawca w ustalonych okresach kontroluje stan, uzupełnia zapasy zużytych części i materiałów. Raz na miesiąc następuje płatność za rzeczywiście wykorzy-stane części i materiały.
Zaletami tej metody jest to, że:– zapas jest ważną inwestycją dla dostawcy – dostawca ponosi koszty inwe-
stycji w zapasy,– dostawca ma gwarancję zakupu jego zapasu,– dostawca jest właścicielem zapasu,– części są dostępne o każdej porze; części pobrane i nieużyte mogą zostać
zwrócone,– użytkownik płaci za zapasy tylko wtedy, gdy ich użyje.Aby technika była opłacalna, należy dokładnie określać poziom zużycia
w zamówieniu.

263
Zapas kontraktowany
Ta technika polega na podpisaniu kontraktu z dostawcą na dostarczanie okre-ślonej grupy materiałów i części zamiennych. Dostawca w kontrakcie zobowiązuje się dostarczyć dany towar w określonym czasie od złożenia zamówienia. Najczę-ściej kontraktuje się części zamienne szybko rotujące i materiały eksploatacyjne o niskiej wartości jednostkowej. Należą do nich np.:
– większość materiałów ściernych i szlifierskich,– większość narzędzi ręcznych, łączników, odczynników chemicznych,– małe części elektryczne,– szybko rotujące części standardowe (łożyska, uszczelki, pasy napędowe),– materiały spawalnicze,– materiały biurowe,– sprzęt BHP.
Odbiorca osiąga w ten sposób następujące cele:– powierza odpowiedzialność dostawcy za zarządzanie szeroką gamą części
tanich, lecz szybko rotujących,– powierza dostawcy odpowiedzialność za grupowanie zapasów i dostaw-
ców,– zwiększa swój poziom obsługi,– może się skoncentrować na zarządzaniu zapasami części drogich,– redukuje swoje koszty administracyjne,– małym kosztem zyskuje dostęp do szerokiej gamy części.
Kontrakt powinien określać– ofertę części dostarczanych,– czas dostawy,– wielkości dostaw,– warunki dostaw interwencyjnych,– oczekiwany poziom obsługi,– warunki płatności.
Dostawca może podpisać kontrakt na dostawy z wieloma odbiorcami, osiąga-jąc korzyści polegające na:
– zyskaniu stałego i regularnego odbiorcy,– zwiększeniu liczby odbiorców tych samych materiałów,– redukcji poziomu zapasów dla odbiorców bez obniżania poziomu obsługi,– zwiększenia swojego wolumenu zakupów,– poprawie pozycji przetargowej – kupuje większe ilości – uzyskuje lepsze
ceny, lepsze warunki dostaw,– poprawie kontroli nad magazynami poprzez większy obrót dobrami.

264
8.6. Podsumowanie
Zarządzanie zapasami części zamiennych i materiałów eksploatacyjnych związane jest utrzymaniem równowagi pomiędzy dostępnością części w magazy-nie a kosztami związanymi z ich zapasami. Poprawne zarządzanie zapasami może przynieść wymierne efekty w postaci obniżenia kosztów związanych z przestojami maszyn, wynikającymi z braku części zamiennych oraz zmniejszeniem stanów magazynowych. Szczególną uwagę należy poświęcić analizie wartościowej i ilo-ściowej magazynowanego asortymentu w celu wyodrębnienia grupy części szcze-gólnie wartościowych, którym należy poświęcić najwięcej uwagi. Pamiętać należy również o analizie krytyczności maszyn dla procesu produkcyjnego. Analiza taka pozwoli na zidentyfikowanie maszyn krytycznych, których przestój wynikający z braku części zamiennych może generować znaczne koszty. Części zamienne do takich maszyn powinny również być pod szczególną uwagą, tak aby zapewnić ich wymaganą dostępność.
W zarządzaniu zapasami części zamiennych istotne jest prowadzenie ewiden-cji ich zużycia, co pozwoli na pozyskanie danych o zapotrzebowaniu i jego regu-larności. Dane takie są podstawą prognozowania zapotrzebowania i wyboru wła-ściwego modelu sterowania zapasami.
Literatura
1. Abt S.: Zarządzanie logistyczne w przedsiębiorstwie. PWE, Warszawa 1998.2. Blaik P.: Logistyka. PWE, Warszawa 2001.3. Coyle J., Bardi E., Langley JR. C.: Zarządzanie logistyczne. PWE, Warszawa
2002.4. Krzyżaniak S.: Podstawy zarządzania zapasami w przykładach. Biblioteka
Logistyka, Poznań 2002.5. Niziński S., Żurek J., Ligier K.: Logistyka dla inżynierów. WKŁ, Warszawa
2011.6. Niziński S., Żurek J.: Logistyka ogólna. WKŁ, Warszawa 2010.7. Okręglicki W., Łopuszyński B.: Użytkowanie urządzeń mechanicznych. WNT,
Warszawa 1980.8. Skowronek CZ., Sarjusz-Wolski Z.: Logistyka w przedsiębiorstwie. PWE, War-
szawa, 1995.

265
9. Bezpieczeństwo techniczne
9.1. Podstawowe pojęcia
Ogólnie pojęcie „bezpieczeństwo” rozumiane jest jako brak akceptowalnego ryzyka dla zdrowia, życia lub strat w majątku czy środowisku naturalnym.
Ponieważ podręcznik jest poświęcony zagadnieniom budowy i eksploata-cji obiektów technicznych, to w naszym przypadku bezpieczeństwem technicz-nym będziemy określać zdolność danego obiektu technicznego, funkcjonującego w określonych warunkach, do zapewnienia w przewidzianych granicach i ciągu sprecyzowanego czasu nieistnienia zagrożenia dla ludzi i środowiska.
Można również do zagadnień bezpieczeństwa podejść w aspekcie nieza-wodności i wówczas: bezpieczeństwem technicznym nazywa się prawdopodo-bieństwo, że ze strony danego obiektu technicznego, działającego w określonych warunkach, nie nastąpi w ciągu sprecyzowanego czasu i w przewidzianych grani-cach żadne zagrożenie dla ludzi i środowiska [5].
Przykładowe miary bezpieczeństwa technicznego w ujęciu niezawodności, to:– trwałość międzyzagrożeniowa, czyli okres między kolejnymi zagroże-
niami technicznymi,– prawdopodobieństwo zagrożenia technicznego,– prawdopodobieństwo bezpieczeństwa technicznego w sensie przeżycia, – częstość zagrożeń technicznych,– intensywność zagrożeń technicznych,– wartość oczekiwana trwałości międzyzagrożeniowej,– całkowity czas niedziałania danego tworu technicznego wskutek uszko-
dzenia powodującego zagrożenie techniczne,– prawdopodobieństwo przywrócenia bezpieczeństwa technicznego,– częstość przywracania bezpieczeństwa technicznego,– intensywność przywracania bezpieczeństwa technicznego,– wartość oczekiwana całkowitego czasu niedziałania danego tworu tech-
nicznego wskutek uszkodzeń powodujących zagrożenie techniczne,– dyspozycyjność bezpieczeństwa technicznego, czyli jakość (dobroć)
ochrony.
Bezpieczeństwo procesowe jest to ogół zagadnień dotyczących bezpieczeń-stwa pracy instalacji przemysłowej w sektorze przemysłu procesowego, np.: che-mia, petrochemia, energetyka, gazownictwo. Ideę systemów bezpieczeństwa w podejściu procesowym przedstawiono na rys. 9.1.

266
Rys. 9.1. Hierarchia systemów zabezpieczeń w bezpieczeństwie procesowym.Źródło: Opracowanie własne na podstawie [5].
Bezpieczeństwo funkcjonalne jest podzbiorem bezpieczeństwa procesowego. Jest to dziedzina inżynierii zajmująca się zapobieganiem zagrożeniom poprzez odpowiednio zaprojektowane zabezpieczenia o ściśle określonych funkcjach. Zaprojektowana funkcja musi być precyzyjnie pełniona w określonych warun-kach realnego zagrożenia z żądaną dokładnością i w określonym czasie. Od precy-zji działania bezpieczeństwa funkcjonalnego zależy bezpieczeństwo ludzi, instala-cji i środowiska.
Układy bezpieczeństwa funkcjonalnego składają się z trzech elementów: – czujnika (przetwornika), np.: czujnik drgań, temperatury, ciśnienia, zady-
mienia,– odpowiedniego układu logicznego (często programowalnego), np. układ
mikroprocesorowy z wprowadzonymi regułami typu: jeżeli przekroczona wartość graniczna sygnału z czujnika X, to uruchom działanie elementu wykonawczego Y,
– elementów wykonawczych, np.: alarmów dźwiękowych, wizualnych, odcięcie zasilania, uruchomienie zraszaczy itp.
Zarządzanie w inżynierii bezpieczeństwa spełnia następujące, podstawowe funkcje:
– funkcje analityczno-ocenowe, obejmujące: identyfikację (rozpoznanie) źródeł ryzyka, szacowanie ryzyka (określenie prawdopodobieństwa zagro-żeń i dotkliwości ich skutków), ocenę wartości ryzyka,
System ograniczenia skutków awarii w otoczeniu obiektu
System ograniczenia skutków awarii w obr obiektuębie
System zabezpieczeń inżynieryjnych (kurtyny, osłony)
System automatyki zabezpieczeniowej
Alarmy i interwencje operatorów
System monitorowania i sterowania
PROCES

267
– funkcje planistyczno-kontrolne, które obejmują: planowanie postępowa-nia wobec ryzyka, kontrole realizacji procedur redukcji ryzyka, monitoro-wanie zagrożeń mających istotny wpływ dla bezpieczeństwa.
Z formalnego punktu widzenia „bezpieczeństwo” jest funkcją argumentu „ryzyko”:
bezpieczeństwo = f (ryzyko),oznacza to, że poziom bezpieczeństwa jest ściśle związany z wartością ryzyka (ryzyko wzrasta – poziom bezpieczeństwa maleje i na odwrót). Można to zagad-nienie zobrazować na przykładzie przedstawionym na rys. 9.2.
Rys. 9.2. Schemat układu równowagi pomiędzy potencjałem zagrożeń a potencjałem bez-pieczeństwa [5].
Ze względu na to, że inżynieria bezpieczeństwa obejmuje swoim zakresem dwa aspekty: cywilny i techniczny, można dokonać oceny tych aspektów osobno lub łączenie, co dla większości przypadków jest całkowicie uzasadnione. Głów-nym celem inżynierii bezpieczeństwa jest niedopuszczenie do powstania zdarzeń niebezpiecznych, a w przypadku ich wystąpienia redukcja skutków negatywnych.
W sposób ogólny, zadania inżynierii bezpieczeństwa można sformułować następująco [5]:
– racjonalna minimalizacja negatywnego oddziaływania obiektów technicz-nych (OT) na otoczenie (ludzie, środowisko, dobra cywilizacji) – zadanie dla IB technicznego,
– racjonalna minimalizacja szkód generowanych negatywnym oddziaływa-niem OT na otoczenie – zadanie dla IB cywilnego,
Inwentaryzacja zagrożeń
Inwentaryzacja systemów bezpieczeństwai ochrony (zabezpieczenia)
Ryzykonieakceptowane
Ryzykotolerowane (ALARP) Ryzyko
akceptowane
Potencjałbezpieczeństwa
Zdolność dozapobieganiastratom
Wielowarstwowesystemybezpieczeństwa
Rodzaj substancjiilość substancjiWarunki procesowei aparaturowe
Potencjałzagrożeń
Zdolność do powodowaniastrat

268
– racjonalna minimalizacja szkód generowanych bezpośrednio negatyw-nym oddziaływaniem zjawisk naturalnych – 1. zadanie dla IB cywilnego,
– racjonalna minimalizacja szkód generowanych bezpośrednio negatyw-nym oddziaływaniem zjawisk naturalnych – 2. zadanie dla IB cywilnego,
– racjonalna minimalizacja szkód generowanych bezpośrednio umyślnym, destrukcyjnym działaniem ludzi – 3. zadanie dla IB cywilnego.
Na rys. 9.3 przedstawiono diagram współzależności zadań inżynierii bezpie-czeństwa technicznego i cywilnego, ze wskazaniem sposobów realizacji poszcze-gólnych zadań.
Rys. 9.3. Diagram współzależności zadań inżynierii bezpieczeństwa technicznego i cywil-nego.Źródło: Opracowanie własne na podstawie [5].

269
9.2. Analiza ryzyka w procesie eksploatacji obiektów technicznych
Celem analizy ryzyka jest określenie i oszacowanie prawdopodobieństwa oraz skutków wystąpienia danego (niepożądanego) zdarzenia.
Analiza ryzyka to określone działania skierowane na obniżenie wpływu nega-tywnych czynników na funkcjonowanie danego podmiotu i podejmowanie odpo-wiednich środków przeciwdziałania i minimalizacji ryzyka. Analiza ryzyka jest jednym z elementów procesu zarządzania ryzykiem.
Wyróżnia się kilka rodzajów podejścia do analizy:– podejście podstawowego poziomu – zastosowanie standardowych zabez-
pieczeń,– podejście nieformalne – oparte na wiedzy i doświadczeniu ekspertów,– szczegółowa analiza ryzyka – z wykorzystaniem technik analizy ryzyka,– podejście mieszane.
Analiza ryzyka jest narzędziem wykorzystywanym m.in. do:– przygotowania polityki bezpieczeństwa i systemów zarządzania bezpie-
czeństwem,– zarządzania projektami,– zarządzania przedsiębiorstwem,– różnego rodzaju analiz biznesowych.
Aby przejść do metod analizy ryzyka, należy zapoznać się z następującymi terminami [6]:
ocena ryzyka – proces analizowania ryzyka i wyznaczania dopuszczalnego ryzyka.
Ryzyko – kombinacja częstości lub prawdopodobieństwa wystąpienia okre-ślonych zdarzeń niebezpiecznych powodujących określone skutki w procesie eks-ploatacji.
Narażenie (ekspozycja) – podleganie oddziaływaniu czynników (niebez-piecznych, szkodliwych, uciążliwych) w procesie eksploatacji.
Zagrożenie – źródło potencjalnej szkody lub okoliczności potencjalnej szkody.
Zdarzenie niebezpieczne – zdarzenie, które może prowadzić do szkody.Poziom bezpieczeństwa (lub ryzyka) wyznacza się różnymi metodami, które
można podzielić na trzy grupy [2]:1. Metody porównawcze (wykorzystanie wiedzy o podobnych instalacjach).
W metodach porównawczych najczęściej wykorzystuje się metody indeksowe (np. DOW Index, OPS Index) oraz listy kontrolne, w których zawarte są kry-

270
tyczne wymagania i w czasie prowadzonych badań (inspekcji) zaznacza się: spełniono, nie spełniono, nie dotyczy.
2. Metody przeglądowe (systematyczny przegląd zagrożeń).3. Metody analityczne (wykrycie zagrożeń i ilościowa ocena scenariuszy awaryj-
nych).Pod względem przydatności metod, w analizach ryzyka systemów technicz-
nych można wyróżnić sześć najczęściej stosowanych rodzajów (tabela 9.1).
tabela 9.1. Metody stosowane w analizie ryzyka w odniesieniu do systemów technicz-nych, podział wg PN-IEC 60300-3-9:1999: „Analiza ryzyka w systemach technicznych”.
Metoda opis i zastosowanieAnaliza drzewa zdarzeń Technika identyfikacji zagrożeń i analizowania częstości,
w której stosuje rozumowanie indukcyjne służące do prze-łożenia różnych zdarzeń inicjujących na możliwe rezultaty.
Analiza rodzajów i skut-ków niezdatności oraz analiza rodzajów skutków i krytyczności niezdatno-ści
Podstawowa technika identyfikacji zagrożeń i analizowa-nia częstości, w której poddaje się analizie wszystkie rodzaje niezdatności danego obiektu wyposażenia pod kątem ich wpływu na inne elementy składowe systemu.
Analiza drzewa niezdat-ności
Technika identyfikacji zagrożeń i analizowania często-ści, w której rozpoczyna się od niepożądanego zdarzenia i wyznacza się wszystkie sposoby jego pojawienia się. Przed-stawia się je w sposób graficzny.
Badania zagrożeń i goto-wości operacyjnej
Podstawowa technika identyfikacji zagrożeń, w której w spo-sób systematyczny ocenia się każdą część systemu w celu przedstawienia sposobu pojawiania się odstępstw od zamy-słu projektowego, z uwzględnieniem możliwości wywołania komplikacji.
Analiza niezawodności człowieka
Technika analizowania częstości, która zajmuje się wpływem ludzi na działanie systemu i ocenia wpływ błędów ludzkich na nieuszkadzalność.
Wstępna analiza zagrożeń Technika identyfikacji zagrożeń i analizowania częstości, która może być stosowana we wczesnym stadium projekto-wania do identyfikacji zagrożeń i oceny ich krytyczności.
EtA (EventTreeAnalyzis) – drzewo zdarzeń Analiza ETA jest techniką jako-ściową lub ilościową. Wykorzystuje się ją w celu identyfikacji danych wyjściowych oraz ich prawdopodobieństw. Analiza ta jest szeroko stosowana w przypadkach, gdy urządzenia mają własności łagodzenia skutków zdarzeń niebezpiecznych, np. w systemach zabezpieczeń. Często też wykorzystuje się ją do identyfikacji sekwen-

271
cji zdarzeń. ETA określa zależności między funkcjonowaniem a uszkodzeniem systemów łagodzących skutki.
Procedura analiz ETA składa się z sześciu głównych etapów:– identyfikacji zdarzenia inicjującego, które może doprowadzić do założo-
nej awarii,– identyfikacji funkcji bezpieczeństwa, przewidzianych do łagodzenia skut-
ków zdarzenia inicjującego,– konstrukcji drzewa zdarzeń,– opisu wynikających z konstrukcji drzewa sekwencji awaryjnych,– wyznaczenia minimalnych przekrojów drzewa,– opracowania dokumentacji.
Każda funkcja bezpieczeństwa ma dwa stany – sukces lub porażkę. Taka kwantyfikacja prowadzi do wyznaczenia sekwencji awaryjnych, które dla omawia-nego przykładu są następujące:
BCDA , DCBA , DCBA , DBA , DBAgdzie: Ā oznacza wystąpienie zdarzenia inicjującego, a następnie wypełnienie (B,C,D), bądź nie, funkcji bezpieczeństwa. Ideę tworzenia drzewa ETA pokazano na rys. 9.4.
Rys. 9.4. Drzewo zdarzeń z trzema funkcjami bezpieczeństwa.Źródło: Opracowanie własne na podstawie [5].
FMEA – (Fault Mode and Effect Analysis) – analiza rodzajów i skutków możliwych błędów (niezdatności). Metoda polega na analitycznym wykrywaniu
Zapoczątkowanie wydarzenia
( )A
Funkcje bezpieczeństwa
(B)
Funkcje bezpieczeństwa
(C)
Funkcje bezpieczeństwa
(D)
Oznaczenie ciągu awaryjnego
A CB D
Zapoczątkowanie wydarzenia
A A CDB
ABD
ABD
ABC
Porażka
Sukces

272
powstawania potencjalnych wad produktu, usługi, sytemu, oprogramowania itp. oraz uwzględnieniu w analizie czynnika krytyczności. Jej celem jest konsekwentne i systematyczne identyfikowanie potencjalnych wad produktu/procesu, a następ-nie ich eliminowanie lub minimalizowanie ryzyka z nimi związanego.
FMEA opiera się na technice indukcyjnej, której podstawowym pytaniem jest: „co stanie się, gdy…?”. Dzięki tej metodzie można zidentyfikować w sposób sys-tematyczny następstwa każdego rodzaju niezdatności wszystkich elementów skła-dowych. Podstawowym zadaniem analizy FMEA jest rozpoznanie rodzaju nie-zdatności każdego elementu składowego systemu oraz jaki będzie skutek tej nie-zdatności dla całego systemu. Najczęściej analiza jest opisowa oraz zapisywana w postaci tablic bądź formularzy.
Analizę FMEA rozszerzyć można do wykonania tak zwanej analizy rodzajów skutków i krytyczności niezdatności. Taka analiza nazywa się FMECA. Zarówno jedna, jak i druga analiza może być stosowana do szacowania prawdopodobień-stwa oraz rozpoznawania zagrożeń. Obie analizy zajmują się elementami składo-wymi systemu.
FMEA i FMECA używa się w celu [7]: – szacowania skutków spowodowanych przez każdy rodzaj uszkodzenia,– określenia znaczenia lub krytyczności wszystkich uszkodzeń,– klasyfikacji znalezionych uszkodzeń,– oszacowania rozmiaru uszkodzeń oraz prawdopodobieństwa wystąpienia
kolejnych uszkodzeń.Wyróżnia się pięć rodzajów analizy FMEA:– produktu – dotyczy optymalizacji niezawodności produktu. określa dzia-
łania, jakie musimy podjąć, gdy produkt opuści przedsiębiorstwo, np. podczas transportu; oprócz tego udziela nam informacji o silnych i sła-bych punktach wyrobu,
– procesu – stosuje się ją w początkowej fazie projektowania procesów tech-nologicznych po to, aby udoskonalać te procesy,
– obsługi – koncentruje się na działaniu obsługi, np. wyboru strategii utrzy-mania maszyn,
– oprogramowania – dotyczy działania oprogramowania komputerowego,– systemu – koncentruje się na ogólnych funkcjach różnego rodzaju syste-
mów.
Na rys. 9.5 przedstawiono wkomponowanie metody FMECA na tle strategii utrzymania maszyn opartej na niezawodności (RCM).

273
Rys. 9.5. Etapy analizy FMECA w procesie wyboru strategii utrzymania maszyn.Źródło: Opracowanie własne.
FtA (Fault Tree Analyzis) – Analiza Drzewa Uszkodzeń (FTA) jest jedną z częściej stosowanych metod analiz niezawodności systemów. Czasami służy ona również do identyfikacji i oceny prawdopodobieństwa zdarzeń początkujących. Polega ona na określeniu powiązań logicznych pomiędzy przyczynami – tzw. zdarzeniami elementarnymi (awarią maszyny, wadliwym zadziałaniem przekaź-nika, nieprawidłowym działaniem operatora) a ich skutkami – zdefiniowanymi przez analityka stanami odbiegającymi od założonej normy (niesprawnością sys-temu, wyciekiem substancji, eksplozją, brakiem odprowadzania ciepła itp.). O ile w poszukiwaniu zdarzeń elementarnych FTA zbliżona jest do metody HAZOP, o tyle w ich ocenie jest metodą ilościową. Korzysta z danych niezawodnościo-wych dotyczących urządzeń mechanicznych, elektrycznych, pneumatycznych, aparatury kontrolno-pomiarowej, danych o wytrzymałości zbiorników, reakto-rów i rur oraz innych informacji opisujących prawdopodobieństwo uszkodzenia dowolnego elementu wchodzącego w skład instalacji i wpływającego na jej funk-cjonowanie. Nazwa metody związana jest z jej postacią graficzną: stan awaryjny – zdarzenie szczytowe połączone jest „gałęziami” wraz z odpowiednimi logicz-nymi bramkami wyboru ze zdarzeniami pośrednimi i elementarnymi niema-jącymi dalszego rozwinięcia. FTA służy do ilościowej oceny prawdopodobnej
Identyfikacja funkcjiwyposażenia(maszyn, urządzeń)i ich zakładanych osiągów
Identyfikacja uszkodzeń pod kątem ich wpływu na funkcjonowanie maszyn
Identyfikacja postaci uszkodzeń(w tym rodzajów zużycia)
Identyfikacja skutków uszkodzeńi ich krytyczności
Zdefiniowanie typu prewencji(CBM lub TBM)
Zdefiniowanie domyślnych zadań dlastrategii wg stanu lub do uszkodzenia
Porównywanie wskaźników, prognozowanie,realizacja założonego planu
Identyfikacja ojawów uszkodzeń
C A
E
M.
F
Drzewo wyposażenia
Kodowanie uszkodzeń
Plan utrzymania
Analiza realizacji zleceń, pracy działu UM

274
częstotliwości występowania zdarzeń niepożądanych w systemach składających się z szeregu elementów o dającej się określić niezawodności. Polega na [7]:
– zdefiniowaniu zdarzenia szczytowego (niesprawności systemu, zdarzenia początkującego),
– ustaleniu hierarchicznej struktury drzewa uszkodzeń (zdarzenia pośred-nie),
– skonstruowaniu drzewa uszkodzeń, polegającego na powiązaniu zdarzeń logicznymi bramkami wyboru,
– określeniu zdarzeń podstawowych wiodących do zdarzenia szczytowego,– określeniu prawdopodobieństwa zajścia zdarzeń początkujących,– wyznaczeniu „minimalnych przekrojów drzewa”, tj. minimalnych zbiorów
zdarzeń elementarnych prowadzących do zdarzenia szczytowego,– obliczeniu prawdopodobieństwa zajścia zdarzenia szczytowego,– analizie wyników pod kątem wyznaczenia dominujących zdarzeń elemen-
tarnych,– analizie czułości polegającej na sprawdzeniu, jak zmiana prawdopodo-
bieństwa uszkodzenia jednego elementu ze zbioru przekrojów minimal-nych wpływa na prawdopodobieństwo wystąpienia zdarzenia szczyto-wego.
Uszeregowana lista przekrojów minimalnych drzewa, prowadzących w danych warunkach do zdarzenia szczytowego, jest szczególnym wynikiem jakościowych analiz metodą FTA. Model drzewa uszkodzeń jest często stosowany jako efek-tywne narzędzie porozumiewania kadry technicznej i decyzyjnej. Opierając się na liczbie i typie uszkodzeń w przekrojach minimalnych, zespół analityków może zaproponować udoskonalenia w systemie (procesie) zmniejszające prawdopodo-bieństwo zajścia zdarzenia szczytowego. Na rys. 9.7 podano przykład analizy FTA.

275
Rys. 9.7. Fragment drzewa uszkodzeń układu chłodzenia reaktora jądrowego.http://manhaz.cyf.gov.pl/manhaz/przewodnik/rozdz_2/rozdz_2_2_2_8.htm

276
HAZoP (HazardandOperabilityStudy) to inaczej analiza zagrożeń i zdol-ności operacyjnych wykorzystywana najczęściej do oceny ryzyka procesowego. Jest to strukturalna metoda identyfikująca potencjalne zagrożenia, jakie wystę-pują procesach przemysłowych. Polega ona na systematycznym przeglądzie zało-żeń projektowych i procesu technologicznego pod kątem mogących się pojawić odchyleń parametrów. Metoda HAZOP zalecana jest szczególnie przy projektowa-niu nowo powstających zakładów, kiedy projekt jest już dobrze udokumentowany oraz przy zmianie planów istniejących zakładów lub gdy nie zostały jeszcze prze-prowadzone poprzednio analizy HAZOP. Definicja metody HAZOP szczególny nacisk kładzie na jej charakter zespołowy. O ile w pozostałych technikach służą-cych do analizy stanu bezpieczeństwa procesowego całość prac może wykonać praktycznie jedna osoba, o tyle sesja HAZOP wymaga uczestnictwa kilku specja-listów z różnych dziedzin związanych z analizowanym procesem. Zespół ponadto musi być kierowany przez przewodniczącego znającego zasady prowadzenia ana-lizy i potrafiącego zastosować je w praktyce. Charakterystyczny dla HAZOP spo-sób działania polega na prowadzonych przez multidyscyplinarny zespół poszu-kiwaniach odchyleń od zamierzeń projektowych, w szeregu spotkań prowadzo-nych metodą „burzy mózgów”. Metoda ta stymuluje aktywność członków zespołu i pomaga w tworzeniu pomysłów, opiera się ona na założeniu, że wysiłek grupowy jest efektywniejszy niż wysiłek poszczególnych członków.
Proces analizy HAZOP można podzielić na następujące etapy:1. Zdefiniowanie studium:
– cele i zakres działań. 2. Dobór zespołu:
– przewodniczący, sekretarz, członkowie. 3. Przygotowanie do studium:
– zdobywanie i przetwarzanie informacji, – zaplanowanie harmonogramu studium, – zorganizowanie spotkań.
4. Przeprowadzenie studium: – przegląd projektu procesowego i prowadzonych operacji, – przedyskutowanie planu i celów studium, – przegląd danych o instalacjach i wyposażeniu, – przeprowadzenie analizy HAZOP.
5. Sporządzenie raportów.
Analiza niezawodności operatorów. Rozpatrując niezawodność człowieka – operatora, istotne jest jego zachowanie w warunkach normalnej eksploata-cji obiektu oraz w sytuacjach awaryjnych. W warunkach normalnej eksploata-cji wykonywane są rutynowe działania nadzorujące eksploatację, kontrola różnego rodzaju wskaźników, prace obsługowo-prewencyjne, testy, regulacje, kalibra-

277
cje itp. W stanach awaryjnych, w których operator zmuszony jest wykonywać bar-dziej nietypowe operacje, a czasem wręcz reagować na zdarzenia nowe, do których nie był przygotowywany, podatność na popełnienie błędu rośnie znacząco. Bio-rąc powyższe pod uwagę, funkcjonowanie i zadania operatora zachowania możemy podzielić na 3 grupy [7]:
– zachowania wynikające z wyuczonych odruchów; operator mniej lub bardziej podświadomie reaguje na sygnalizowaną sytuację, działa automa-tycznie,
– zachowania wyuczone wymagające od operatora świadomego zastoso-wania znanych mu reguł i procedur postępowania,
– zachowania oparte na wykształceniu i posiadanej wiedzy wykorzysty-wane w sytuacjach nowych i dotąd nieznanych.
Najmniej błędów powstaje przy działaniach wykonywanych jako wyuczone odruchy. W sytuacjach gdzie wymagany jest większy wysiłek operatora i dłuższy czas reagowania, prawdopodobieństwo popełnienia błędu wzrasta. Może ono wynikać z zapomnienia procedur postępowania lub ich elementów, błędnej kolejności wykonania poszczególnych czynności, wykonania ich w nieodpowiednim momencie lub niedokładnie. W tym typie zachowań mieszczą się również działania człowieka polegające na wykonaniu pewnych obliczeń i wykorzystaniu w nich wzorów czy też programów komputerowych. Najbardziej narażone na błędy są zachowania człowieka w sytuacjach nieznanych, w których musi on przeprowadzać złożone analizy myślowe, np. zdiagnozować na podstawie dostępnych przesłanek zaistniały problem, dokonać analiz porównawczych, opracować procedurę działań stosownych do sytuacji, wykonać te działania, ocenić ich efekty itd. Im bardziej złożony problem, tym więcej czasu potrzeba na reakcję operatora i tym większe prawdopodobieństwo popełnienia błędu. Należy podkreślić, że skutki błędów popełnionych przez opera-tora działającego na zasadzie wyuczonych odruchów czy też stosujących odpowied-nio ustalone reguły są możliwe przynajmniej częściowo do przewidzenia. Można ustalić, co się zdarzy, jeżeli operator w danej sytuacji naciśnie nieprawidłowy przy-cisk, nie przełączy odpowiedniej dźwigni itd. Istnieje więc możliwość zastosowa-nia odpowiednich środków przeciwdziałania takim błędom (np. blokady, zabezpie-czenia itp.). Znacznie trudniej jest przewidzieć efekty działań operatora w sytuacjach nierutynowych. Wielką rolę w tym przypadku odgrywa nie tylko wiedza i umiejętno-ści operatora, ale także jego doświadczenie. Dla wielu sytuacji operatorzy nie mogą nabyć odpowiedniego doświadczenia w czasie normalnej eksploatacji obiektów technicznych, a celowe wywoływanie sytuacji nietypowych (dla celów szkolenio-wych) na rzeczywistych obiektach staje się niemożliwe ze względów technicznych, ekonomicznych i bezpieczeństwa. W takich przypadkach jedyną drogą pozyskania praktycznego doświadczenia staje się wykorzystanie symulatorów.
Stosując różne metody oceny prawdopodobieństwa popełnienia błędu przez operatora (np. metoda TESEO lub HEART), można dojść do wniosku, że główną

278
przyczyną tych błędów jest wpływ stresu czasowego, a także poziom wyszkolenia. Na rys. 9.8 i 9.9 pokazano, jak kształtuje się poziom prawdopodobieństwa popeł-nienia błędu przez człowieka w zależności od dostępnego czasu na podjęcie dzia-łań oraz jego doświadczenia w zaistniałej sytuacji.
Rys. 9.8. Wpływ stresu czasowego na prawdopodobieństwo popełnienia błędu przez ope-ratora [7].
Rys. 9.9. Wpływ wyszkolenia operatora na prawdopodobieństwo popełnienia przez niego błędu [7].
0
0,025
0,050
0,075
0,100
0,125
0,150P
raw
dopo
dobi
eńst
wo
pope
łnie
nia
błęd
u
20-10s 10-2s <2sDostępny czas reakcji na zagrożenie
0
0,01
0,02
0,03
0,04
0,05
Pra
wdo
podo
bień
stw
o po
pełn
ieni
a bł
ędu
dobry średni słabyPoziom wyszkolenia
0,06

279
Czynniki wpływające na niezawodność człowieka można podzielić na dwie główne grupy (czynniki zewnętrzne i wewnętrzne) [7]. Do pierwszej grupy zali-czamy:
– sposób organizacji pracy,– sposób zdefiniowania, złożoność i liczba zadań,– warunki środowiskowe, w tym temperaturę i wilgotność powietrza, oświe-
tlenie, hałas, zapylenie itp.,– rozwiązania ergonomiczne na stanowisku pracy, interfejsy do komunikacji
operatora z urządzeniem,– wyposażenie w odpowiedni sprzęt i środki techniczne,– personel współpracujący i nadzorujący pracę,– szkolenia i treningi, sposoby motywowania,– prawidłowe kryteria doboru operatorów do konkretnych prac uwzględnia-
jące ich zdolności i możliwości,– presję czasu,– wagę wykonywanych zadań i ich liczbę,– odpowiednie instrukcje (precyzja, czytelność, jasność).Drugą grupę stanowią następujące czynniki:– stan zdrowia i wiek, budowa ciała, płeć,– umiejętności i doświadczenie operatora,– poziom inteligencji,– ogólny poziom wiedzy,– motywacja do pracy,– czynniki fizjologiczne, w tym m.in. metabolizm, mechanizmy termore-
gulacji, wydolność układów krążenia, oddechowego, pokarmowego itp.
PHA (Preliminary Hazard Analysis) – Wstępna Analiza Zagrożeń – jest metodą jakościową, koncentrującą się na identyfikacji materiałów niebezpiecz-nych i głównych elementów obiektu. Jest stosowana najczęściej we wstępnej fazie opracowywania projektu obiektu. Metoda polega na stworzeniu listy zagrożeń adekwatnej do poziomu szczegółowości dostępnych informacji. Proces analiz zagrożenia jest przeprowadzany poprzez systematyczny przegląd dostępnej doku-mentacji projektowej. Analizy dokonuje zespół, w skład którego, oprócz kierow-nika mającego doświadczenie w analizach PHA, mogą wchodzić: projektanci, technolodzy, mechanicy, automatycy, operatorzy. Dla każdego wybranego ele-mentu instalacji czy materiału niebezpiecznego ustala się wszystkie potencjalne zagrożenia. Dla każdego z nich określa się możliwe przyczyny i skutki oraz kon-struuje tabelę ryzyka (tabela 9.6), w której podaje się oszacowane prawdopodo-bieństwo wystąpienia zdarzenia niebezpiecznego i krytyczność skutków [2].
Dla zobrazowania rozkładu krytyczności poszczególnych zagrożeń można posłużyć się matrycą ryzyka, której wzór i legendę przedstawiono na rys. 9.10.

280
tabela 9.2. Zestawienie kategorii prawdopodobieństwa i skutków w analizie ryzyka pro-jektowania i wdrażania nowej technologii.
Kategoria prawdopo-
-dobieństwa
Interpretacja prawdopodobieństwa
Kategoria skutków Interpretacja skutków
P1=1 Zdarzenie bardzo mało praw-dopodobne, aby zaistniało.
S1=1 Znikome, łatwe do skorygo-wanie na etapie projektowania
i wdrażania.P2=2 Zdarzenie mało prawdopo-
dobne, aby zaistniało przy kontrolowanym i korygowa-
nym projektowaniu lub wdra-żaniu nowej technologii.
S2=2 Odczuwalne, ale niezagraża-jące płynności finansowej.
P3=3 Zdarzenie całkiem możliwe, że wystąpi w trakcie realizacji prac BR lub wdrażania nowej
technologii.
S3=3 Odczuwalne i mogące genero-wać dodatkowe koszty lub brak pełnego sukcesu w badaniach
rozwojowych.P4=4 Podwyższone prawdopodo-
bieństwo wystąpienia zdą-żenia niepożądanego, nawet przy kontrolowanym i kory-gowanym projektowaniu lub wdrażaniu nowej technologii.
S4=4 Wyraźnie odczuwalne, generu-jące nieprzewidziane nakłady finansowe na realizację przed-sięwzięcia lub brak opracowa-nia innowacyjnej technologii.
P5=5 Praktycznie pewne wystąpie-nie zdarzenia.
S5=5 Powodujące utratę płynności finansowej – trudne do wyeli-
minowania.
Źródło: Opracowanie własne.
Kat
egor
ie
praw
dopo
dobi
eńst
wa P5
P4P3P2P1
S1 S2 S3 S4 S5Kategorie skutków
Ryzyko nieakceptowane – wymaga przeprojektowania założeń prac BR i wdrożeniowych.

281
Ryzyko wysokie – wymagające zastosowania efektywnych metod jego ograniczenia przed rozpoczęciem prac BR. Ryzyko podwyższone – wymagające szczególnego monitorowania z opra-cowanym planem działań korygujących (plany awaryjne).Ryzyko akceptowalne – wymagające monitorowania przyjętych założeń i w razie potrzeby, na bieżąco podejmowania działań korygujących.Ryzyko minimalne.
Rys. 9.10. Przykład matrycy ryzyka procesu projektowania i wdrażania nowej technologii z legendą.Źródło: Opracowanie własne.
Rozpatrując przedstawione metody analizy ryzyka oraz inne, które nie zostały opisane w tym podręczniku, można wnioskować, że w każdej metodzie jest konieczne przeprowadzenie identyfikacji zagrożeń i skutków.
W analizie zagrożeń można wyróżnić trzy główne grupy źródeł występowania zdarzeń niebezpiecznych:• zawodnośćobiektówtechnicznych–uszkodzeniaczęścimaszyn,niezdatności
technologiczne, uszkodzenia sterowania itp.,• zagrożenia środowiskowe – pożar, powódź, huraganowe wiatry, katastrofy
budowlane wywołane przez różne czynniki (np. tąpnięcia, prace budowlane, wybuch gazu, uszkodzenia linii energetycznych, wodnych, gazowych itp.),
• zagrożeniaspowodowanedziałaniemludzi:– umyślne (kradzież; niezadowoleni pracownicy, działając z różnych pobu-
dek, a mając dużą wiedzę o rozwiązaniach technicznych, informatycznych w firmie, mogą prowadzić sabotaż, działanie na rzecz innych; szpiego-stwo przemysłowe – spełnienie wymagań kontraktowych często wymaga dopuszczenia stron trzecich),
– nieumyślne (choroby, nieuwaga, pomyłkowe nastawienia maszyn, niewie-dza w zakresie obowiązków i uprawnień).
Dla zapewnienia dokładnej identyfikacji zagrożeń często należy przeprowa-dzić identyfikacje trzech modeli, które charakteryzują rozpatrywany system eks-ploatacji:
– model przestrzenny, który zawiera informacje o rodzaju i rozmieszczeniu obiektów technicznych w przedsiębiorstwie oraz ich ważności dla przed-siębiorstwa,
– model niezawodnościowy, który określa zależności funkcjonowa-nia poszczególnych maszyn w zależności od ich stanu technicznego, z wyszczególnieniem struktur niezawodnościowych,

282
– model organizacyjny, który przyporządkowuje osoby odpowiedzialne za kierowanie eksploatacją, obsługiwanie i użytkowanie maszyn.
Na podstawie pierwszego modelu można zidentyfikować maszyny i urządze-nia, które są ważne dla przedsiębiorstwa i ustalić hierarchię krytyczności maszyn. Z kolei analiza niezawodności pozwala na ustalenie stanów niezdatności naj-częściej występujących w rozpatrywanych maszynach. Połączenie tych informa-cji pozwala na określenie szczególnie krytycznych dla przedsiębiorstwa zagro-żeń związanych ze zmianą stanu technicznego maszyn. Trzeci model – organiza-cyjny, powinien pozwolić na zidentyfikowanie osób mających bezpośredni kon-takt z maszynami w procesie użytkowania i obsługiwania. Jest on podstawą do zidentyfikowania zagrożeń wywołanych przez działania umyślne lub nieumyślne pracowników.
Istotą ryzyka jest podejmowanie działań w obszarze eksploatacji, których skutki mogą być różne. Jest to element dynamiczny, bo związany z destrukcją maszyn w toku eksploatacji. Stąd eksploatowanie maszyn wiąże się z ryzykiem poprzez możliwość:
– nieosiągnięcia zamierzonego celu,– poniesienia odpowiedzialności za niepożądany przebieg i skutki eksplo-
atacji (ofiary wypadków, utrata mienia, skażenie środowiska naturalnego itp.).
W zależności od rozpatrywanego systemu eksploatacji należy uwzględniać specyficzne skutki dla tego systemu. Poniżej przedstawiono przykładowe rodzaje skutków:
– utrata zdrowia lub życia pracowników,– zła jakość produktu lub skażenie żywności,– obniżenie wydajności produkcji,– skażenie środowiska,– straty finansowe,– odpowiedzialność prawna. W celu dokładnej identyfikacji skutków należy wyznaczyć prawdopodobień-
stwo warunkowe lub stopnie pewności wystąpienia skutku pod warunkiem, że zaistniał już dany stan niebezpieczny CF(S/X) oraz należy oszacować zakres kon-sekwencji. Do tego celu może posłużyć współczynnik krytyczności skutku Wks, który zdefiniowano jako iloczyn stopnia pewności wystąpienia skutku dla danego stanu niebezpiecznego oraz rangi konsekwencji Rk.
(9.1)
W dokładnych analizach ryzyka należy uwzględniać nie tylko rodzaje skut-ków, ale również ich wartość. Samo wskazanie, że skutkiem może być strata finan-sowa jest nieprecyzyjne – np. co innego znaczy strata 1 tyś zł, a strata 1 mln zł. Uwaga ta dotyczy również pozostałych rodzajów skutków. Zatem wyznaczanie

283
rangi dla konkretnego problemu jest ważne i powinno być uwzględnione przy dokładnej ocenie ryzyka.
Samo określenie wartości ryzyka, np. poprzez obliczenia wskaźnika:
(9.2)
gdzie:CFi – pewność (prawdopodobieństwo) wystąpienia i-tego stanu niebezpiecznego,
– suma wskaźników skutków dla i –tego stanu i j-tego skutku,
byłoby niepełnym procesem analizy ryzyka. Po oszacowaniu poziomu ryzyka (wg wybranej metody) należy wskazać sposób jego ograniczenia dla najbardziej kry-tycznych stanów niebezpiecznych.
Najogólniej, można wyróżnić trzy grupy środków ograniczania ryzyka [1]: techniczne – wykorzystywane zarówno w strukturze stanowiska pracy, jak
i technologii wykonywanego procesu wg hierarchii wynikającej z koncepcji mini-malizowania zagrożeń i ekspozycji poprzez:I. Wewnętrznie bezpieczną budowę stanowisk pracy, tj. konstrukcje maszyny,
urządzeń mechanizujących i automatyzujących, środków transportu, wielko-ści i budowy materiału obrabianego, doboru parametrów pracy itd.
II. Stosowanie technicznych środków ochronnych, tj. środków ochrony zbioro-wej jako podstawowych środków ochronnych oraz środków ochrony indywi-dualnej i dodatkowych jako uzupełniających środków ochronnych.
III. Informowanie o zagrożeniach i o rozmaitego typu ograniczeniach.Proceduralne – związane ze stosowaniem bezpiecznych metod obsługi
maszyn, opartych na wymaganiach zawartych w przepisach, normach i przewod-nikach oraz na wiedzy i doświadczeniu osób kształtujących poziom bezpieczeń-stwa (pracodawcy, projektanci, technolodzy, kierownictwo).
Behawioralne – związane bezpośrednio z najważniejszą sferą, sferą ludzkich zachowań, kształtowania postaw, motywowania, komunikowania się, zdobywania wiedzy i umiejętności, czyli szeroko pojętą świadomością.
Warto zauważyć, że niezależnie od wyboru metody ograniczenia ryzyka, osią-gnięcie tego celu może odbyć się albo na skutek zmniejszenia prawdopodobień-stwa (np. zastosowanie systemu kontroli trakcji ruchu w pojeździe), albo zmniej-szenie oddziaływania skutków (np. zastosowanie poduszek powietrznych).

284
9.3. Aspekty prawne i normatywne w budowie i eksploatacji maszyn i urządzeń
9.3.1. Wprowadzanie na rynek wyrobów nowychNajwiększą i najbardziej uciążliwą barierą w handlu między państwami są
krajowe wymagania odnoszące się np. do jakości i bezpieczeństwa wyrobów tra-fiających na rynek. Każdy kraj próbował tworzyć przez lata odrębny system prze-pisów i norm, praktycznie zawsze wyraźnie różniących się od innych. Oznaczało to, iż producent sprzedający swój produkt do innych krajów musiał za każdym razem liczyć się z innymi przepisami, a co za tym idzie spełniać inne wymogi. Tak więc, by osiągnąć swobodny przepływu towarów, należało zniwelować te różnice. Jednak nie można było, ze względu na bezpieczeństwo wszystkich konsumentów, zlikwidować dotychczasowo obowiązujących norm. Trzeba było zatem tak zhar-monizować systemy występujące w krajach, aby na terenie całej UE towary podle-gały takim samym wymaganiom [4].
Na początku próbowano, poprzez regulacje na szczeblu unijnym, pedantycz-nie i drobiazgowo ustalić wymagania dla poszczególnych kategorii produktów. Proces ten okazał się jednak utopijny. Był zbyt trudny, skomplikowany i czaso-chłonny. Wtedy oczywista stała się potrzeba zaprojektowania nowego, uproszczo-nego podejścia do kwestii harmonizacji przepływu wyrobów między innymi kra-jami.
oznaczenie CE jest jednym z elementów systemu ogólnego bezpieczeństwa produktów. Kupujący może orientować się, czy produkt wybrany przez niego spełnia podstawowe wymogi bezpieczeństwa. Instytucja nadzoru może spraw-dzić poprawność uzasadnienia i odpowiednie umieszczenie na produkcie. Wła-dze Unii Europejskiej dążą do tego, by realizować ideę wprowadzenia na rynek jedynie bezpiecznych produktów.
W 1985 roku Wspólnota Europejska przyjęła tzw. „Nowe Podejście”. Zakła-dało ono synchronizowanie przepisów technicznych. Krok ten był bardzo ważny i konieczny. Było to wyjście naprzeciw wzrastającej wymianie handlowej i ujed-noliceniu wymagań dotyczących bezpieczeństwa produktów konsumpcyjnych. W 1989 roku „Nowe Podejście” zostało uzupełnione tzw. Globalnym Podejściem. Wyodrębniono wobec tego zasady stosowania i oznaczania CE. 1 stycznia 1993 roku, swobodny przepływ towarów stał się możliwy. Wszystkie członkowskie kraje zostały zobligowane do wspólnego prawa.
Znak CE ma za zadanie potwierdzić, że wypromowany na rynek unijny pro-dukt jest bezpieczny zgodnie z ogólnymi wymaganiami dotyczącymi bezpieczeń-stwa, zawartymi w Dyrektywie 2001/95/WE. Dyrektywa ta stanowi punkt odnie-sienia ustaw obowiązujących w krajach należących do Unii Europejskiej. Oznacza to, że producent poddał się procedurom oceny przewidzianym dla określonego

285
produktu. Pozwala to na niezależny obrót oraz serwis produktu na rynku wspól-notowym. Znak CE oznacza, iż producent deklaruje, że wyrób wypromowany do obrotu spełnia zasadnicze wymagania ujęte w uregulowaniach. W Polsce odnosi się to najczęściej do wymagań w Rozporządzeniach redagowanych na podstawie Ustawy z dnia 30 sierpnia 2002 roku o systemie oceny zgodności, wprowadzają-cych do systemu prawnego tzw. Dyrektywy Nowego Podejścia.
Odnoszą się one do wielu grup produktów, między innymi takich, jak:– urządzenia elektryczne zasilane niskim napięciem,– proste zbiorniki ciśnieniowe,– zabawki,– materiały budowlane,– kompatybilność elektromagnetyczna,– maszyny,– środki ochrony indywidualnej,– wagi nieautomatyczne, – aktywne wszczepiane urządzenia medyczne,– urządzenia spalające paliwo gazowe,– nowe kotły grzejne opalane paliwem płynnym i gazowym,– materiały wybuchowe do użytku cywilnego,– urządzenia medyczne,– sprzęt i systemy ochronne przeznaczone do stosowania w atmosferze
potencjalnego wybuchu,– rekreacyjne jednostki pływające,– windy,– urządzenia ciśnieniowe,– urządzenia medyczne do diagnostyki in vitro,– radiowe i telekomunikacyjne urządzenia końcowe,– koleje linowe do transportu osób,– przyrządy pomiarowe,– sprawność energetyczna lodówek i zamrażarek oraz ich kombinacji,– przewoźne urządzenia ciśnieniowe,– emisja hałasu do otoczenia przez urządzenia pracujące na zewnątrz,– stabilizatory oświetlenia jarzeniowego.Występują 23 dyrektywy tyczące się różnych wyrobów, które muszą być opa-
trzone oznaczeniem CE.Do 30 kwietnia 2004 roku obowiązującym krajowym znakiem bezpieczeństwa
był znak B. Po wejściu Polski od Unii Europejskiej zostały wprowadzone zmiany. Od 1 maja 2004 roku znak B przestał mieć charakter nakazany przepisami. Znak ten jednak mógł być używany obok znaku CE. Był to czas ogromnej rewolucji na rynku. Zmiany głównie tyczyły się wprowadzenia do obrotu produktów wcho-

286
dzących na rynek Unii Europejskiej. Większość produktów została podzielona na dwie odrębne grupy:
– Pierwsza grupa dotyczy wyrobów podlegających przepisom oznakowa-nia CE. Zostały stworzone dyrektywy opisujące tzw. zasadnicze wymaga-nia w zakresie bezpieczeństwa. Oznakowanie wyrobu ustandaryzowanym symbolem graficznym, tzw. znakiem CE, oznacza spełnienie wymagań. W szczególnych wypadkach producenci muszą również uzyskać certyfikat CE.
– Druga grupa wyrobów obejmuje wszystkie inne, które nie są objęte ozna-kowaniem CE. Wymagania dla tej grupy wyrobów opisane są w dyrekty-wie europejskiej o ogólnym bezpieczeństwie produktu.
Producentem może być osoba fizyczna lub prawna odpowiedzialna za zaprojektowanie, wytworzenie produktu. Celem producenta jest wprowadzenie wytworu na rynek pod określoną nazwą. Procedura zgodności z wymogami jest bardzo prosta lub bardzo złożona i do tego kosztowna. Zajmuje się tym jednostka notyfikowana. Obecnie działają różne jednostki prowadzące badania, do których dostęp jest powszechny. W systemie bezpieczeństwa produktów musi funkcjono-wać element kontroli i kar za nieodpowiednie dostosowanie się do postanowień zawartych w ustawach i współobowiązujących rozporządzeniach. Każdy produ-cent, który umieszcza znak CE na produkcie, musi liczyć się z możliwością kon-troli. O nieprawidłowościach najczęściej informują konsumenci. Funkcjonuje rejestr produktów niebezpiecznych, którym zajmuje się prezes UOKiK’u. Rejestr ten jest źródłem informacji również dla konsumentów.
Warto zauważyć, że znak CE nie jest handlowym świadectwem jakości ani certyfikatem bezpieczeństwa. Jest on tylko poświadczeniem zgodności z funkcjo-nującymi w Unii Europejskiej wymaganiami bezpieczeństwa.
Oprócz zasad Nowego Podejścia niezbędne są także warunki umożliwiające wiarygodną ocenę zgodności. Uchwała Rady Europejskiej z 1989 roku w spra-wie Globalnego Podejścia do certyfikacji i badań daje właśnie takie wytyczne dla polityki wspólnotowej, uzupełniające Nowe Podejście. A zatem w celu zapewnie-nia spójnego podejścia do oceny zgodności wyrobów w przepisach Wspólnoty uwzględniono:
– jednolite części składowe tej oceny (moduły), obejmujące fazy projekto-wania i wytwarzania,
– kryteria stosowania określonych procedur, kryteria działalności jednostek wykonujących te procedury oraz kryteria stosowania oznakowania CE,
– stosowanie norm dotyczących zapewnienia jakości (seria EN ISO 9000) i wymagań stawianych jednostkom oceniającym zgodność (seria EN 45000),
– systemy akredytacji, stosowanie technik porównawczych, porozumienia o wzajemnym uznawaniu,

287
– programy realizowane w celu zmniejszenia różnic między państwami członkowskimi w istniejących infrastrukturach zapewnienia jakości (takich, jak systemy metrologiczne, systemy wzorcowania, laboratoria badawcze, jednostki certyfikujące i inspekcyjne, jednostki akredytujące),
– zawieranie porozumień o wzajemnym uznawaniu, współpracy i pomocy technicznej między UE i krajami trzecimi.
Globalne Podejście zostało uzupełnione decyzją Rady 90/683/EWG, zastą-pioną następnie przez decyzję 93/465/EWG z 1993 roku. Decyzja ta ustala zarówno ujednolicone ścieżki i elementy składowe oceny zgodności w ramach Nowego Podejścia, czyli tzw. moduły, jak i zasady nanoszenia i stosowania ozna-kowania zgodności CE.
System modułowy podzielił procedury oceny zgodności na kilka osobnych operacji (tzw. modułów). Moduły są różne w zależności od:
– stopnia zaawansowania wytwarzania wyrobu (np. faza projektu, proto-typu, produkcji),
– sposobu oceny zgodności (np. sprawdzenie dokumentacji, zatwierdzenie typu, zapewnienie jakości),
– osoby, która przeprowadza ocenę (producenta albo strony trzeciej).Tak więc ocena zgodności według Globalnego Podejścia może bazować na:– wewnętrznej kontroli dokonywanej przez producenta podczas projekto-
wania i produkcji,– badaniach typu, prowadzonych przez stronę trzecią w połączeniu
z wewnętrzną kontrolą produkcji przez producenta,– badaniach typu lub projektu przez stronę trzecią w połączeniu z zatwier-
dzeniem przez nią wyrobu lub systemu zapewnienia jakości produkcji, lub z weryfikacją produkcji przez stronę trzecią,
– weryfikacji jednostkowej projektu i produkcji przez stronę trzecią albo zatwierdzeniu pełnego systemu zapewnienia jakości przez stronę trzecią.
Uproszczony schemat realizacji procedur oceny zgodności przedstawiono na rys. 9.11, natomiast tabela 9.3 zawiera opis modułów.
Wymagania zasadnicze, zawarte w dyrektywach Nowego Podejścia, mogą pokrywać się lub wzajemnie dopełniać w zależności od rodzaju zagrożeń uwzględ-nionych w tych wymaganiach, odnoszących się do danego wyrobu. Jednak wpro-wadzenie na rynek lub oddanie do użytku może mieć miejsce tylko wtedy, gdy wyrób spełnia przepisy wszystkich dyrektyw, które mają do niego zastosowanie oraz gdy poddany został ocenie zgodności, uwzględniającej wszystkie te dyrek-tywy. Jeśli ten sam wyrób lub rodzaj ryzyka objęty jest dwoma lub więcej dyrekty-wami, zastosowanie innych dyrektyw może zostać czasami wyłączone na podsta-wie analizy ryzyka.

288
Rys. 9.11. Schemat realizacji procedur zgodności [4].
tabela 9.3. Opis modułów zgodności.
oznaczenie Nazwa modułu opisA Wewnętrzna
kontrola produkcji
Obejmuje wewnętrzną kontrolę projektowania i wytwarzania. Interwencja trzeciej strony (jednostki notyfikowanej) nie jest wymagana.
B Badanie typu WE Dotyczy fazy projektowania i musi być uzupełnione modułem dotyczącym oceny w fazie wytwarzania. Świadectwo badania typu WE* jest wystawione przez jednostkę notyfikowaną.
C Zgodność z typem
Dotyczy fazy wytwarzania i uzupełnia moduł B. Obejmuje zapewnienie zgodności z typem opisa-nym w świadectwie badania typu WE, wystawionym w ramach modułu B. Interwencja trzeciej strony (jed-nostki notyfikowanej) niewymagana.
D Zapewnienie jakości produkcji
Dotyczy fazy wytwarzania i uzupełnia moduł B. Wywodzi się z normy EN ISO 9002, dotyczącej sys-temów zapewniania jakości. Przewidziany jest udział jednostki notyfikowanej, zatwierdzającej i kontrolują-cej system jakości wytwórcy w zakresie produkcji, kon-troli końcowej i badań wyrobu.
* Procedura określona rozporządzeniem Ministra Gospodarki z dnia 21 października 2008 r. w sprawie zasadniczych wymagań dlamaszyn (Dz. U. Nr 199, poz. 1228) – dalej r.z.w., według której jednostka notyfikowana (czyli uprawniona) bada i następnie zaświadcza, że zgłoszony do badania (przez producenta lub jego przedstawiciela, np. handlowego) model maszyny, zwany dalej „typem”, spełnia wymagania r.z.w.m.

289
E Zapewnienie jakości wyrobu
Dotyczy fazy wytwarzania i uzupełnia moduł B. Wywodzi się z normy EN ISO 9003, dotyczącej sys-temów zapewnienia jakości. Przewidziany jest udział jednostki notyfikowanej,zatwierdzającej i kontrolującej system jakości wytwórcy w zakresie kontroli końcowej i badań wyrobu.
F Weryfikacja wyrobu
Dotyczy fazy wytwarzania i uzupełnia moduł B. Jed-nostka notyfikowana kontroluje zgodność z typem opi-sanym w świadectwie badania typu WE, wystawionym w ramach modułu B oraz wystawia świadectwo zgod-ności.
G Weryfikacja jednostkowa
Obejmuje fazy projektowania i wytwarzania. Poszcze-gólne wyroby są badane przez jednostkę notyfikowaną, która wystawia świadectwo zgodności.
H Pełne zapewnienie jakości
Dotyczy faz projektowania i wytwarzania. Wywodzi się z normy EN ISO 9001, dotyczącej systemów zapewnie-nia jakości. Przewidziany jest udział jednostki notyfi-kowanej, zatwierdzającej i kontrolującej system jakości wytwórcy w zakresie projektowania, produkcji, kon-troli końcowej i badań wyrobu.
Źródło: Opracowanie własne na podstawie [4].
Podstawową zasadą Nowego Podejścia jest ograniczenie harmonizacji prawa do wymagań zasadniczych, niezbędnych do ochrony interesu publicznego. Wymagania te dotyczą w szczególności ochrony zdrowia i bezpieczeństwa użyt-kowników (konsumentów oraz pracowników), a niekiedy także innych ważnych wymagań (np. ochrony mienia albo środowiska). Wymagania zasadnicze są tak sformułowane, aby zapewniały wysoki poziom ochrony. Odnoszą się one do:
– pewnych rodzajów zagrożeń charakterystycznych dla danego wyrobu (np. odporności fizycznej i mechanicznej, palności, właściwości chemicznych, elektrycznych lub biologicznych, higieny, radioaktywności, dokładności),
– samego wyrobu lub jego działania (np. przepisy dotyczące materiałów, projektów, budowy, procesu wytwarzania, instrukcji sporządzonych przez producenta) albo głównego celu ochrony (np. poprzez określenie przykła-dowej listy).
Należy stosować te wymagania zasadnicze, które opisują konkretne zagroże-nia związane z danym wyrobem. Tak więc producenci muszą przeprowadzić ana-lizę zagrożeń, aby określić, które wymagania zasadnicze mają zastosowanie do danego wyrobu. Analiza ta powinna być udokumentowana i dołączona do doku-mentacji technicznej.

290
Producent zobowiązany jest do opracowania dokumentacji technicznej, która dostarcza informacji na temat konstrukcji, produkcji i funkcjonowania wyrobu.
Ponadto dyrektywy Nowego Podejścia zobowiązują producenta do stworzenia dokumentacji technicznej zawierającej informacje o zgodności wyrobu z odpo-wiednimi wymaganiami. Dokumentacja ta może być częścią dokumentacji sys-temu jakości, jeżeli dyrektywa przewiduje procedurę oceny zgodności, opartą na systemie jakości (moduły D, E, H i ich warianty). Obowiązek ten powstaje w chwili wprowadzenia wyrobu na rynek, niezależnie od jego geograficznego pochodzenia.
Dokumentacja techniczna musi być przechowywana przez co najmniej 10 lat od dnia wyprodukowania ostatniego wyrobu, chyba że dyrektywa wyraźnie wyznacza inny okres (np. zgodnie z dyrektywą dotyczącą aktywnych implantów medycznych oraz urządzeń medycznych dokumenty muszą być przechowywane przez pięć lat). Obowiązek ten ciąży na producencie lub upoważnionym przedsta-wicielu ustanowionym na terenie Wspólnoty. W niektórych przypadkach obowią-zek ten przejmuje importer lub osoba odpowiedzialna za wprowadzenie wyrobu na rynek Wspólnoty.
Treść dokumentacji technicznej określona jest oddzielnie w każdej z dyrek-tyw, w zależności od wyrobu, którego dyrektywa dotyczy. Z zasady dokumentacja powinna zawierać informacje o konstrukcji, produkcji i działaniu wyrobu. Szcze-góły zawarte w dokumentacji zależą przede wszystkim od charakteru wyrobu. Są także podyktowane tym, co uznano za istotne z technicznego punktu widze-nia, aby wykazać zgodność wyrobu z zasadniczymi wymaganiami odpowiedniej dyrektywy lub – jeżeli zastosowano normy zharmonizowane – z tymi normami (zamiast wskazywania wymagań zasadniczych objętych normami).
9.3.2. Eksploatacja i utrzymanie bezpieczeństwa Zagadnienie związane z bezpieczeństwem eksploatacji maszyn, a tym samym
osób je obsługujących stanowi nieodzowny obowiązek każdego pracodawcy. Pro-ces ten został określony w rozporządzeniu Ministra Gospodarki z dnia 30 paź-dziernika 2002r. w sprawie minimalnych wymagań dotyczących bezpieczeń-stwa i higieny pracy w zakresie użytkowania maszyn przez pracowników pod-czas pracy, a także w dyrektywie z 16 września 2009 r. dotyczącej minimalnych wymagań w dziedzinie bezpieczeństwa i higieny użytkowania sprzętu roboczego przez pracowników podczas pracy. Także w „Kodeksie Prawa Pracy” istnieje punkt mówiący o tym, że: „Pracodawca jest obowiązany zapewnić, aby stoso-wane maszyny i inne urządzenia techniczne: zapewniały bezpieczne i higieniczne warunki pracy, w szczególności zabezpieczały pracownika przed urazami, dzia-łaniem niebezpiecznym substancji chemicznych, porażeniem prądem elektrycz-nym, nadmiernym hałasem, działaniem drgań mechanicznych i promieniowa-nia oraz szkodliwym i niebezpiecznym działaniem innych czynników środowiska

291
pracy, a także uwzględniały zasady ergonomii”. Czas na przystosowanie maszyn do bezpiecznego użytku, które nie mają oznaczenia C, wyznaczony został do 1 stycznia 2006 r.
Warto wyróżnić jeszcze inne akty prawne i normy, które dotyczą bezpieczeń-stwa w czasie eksploatacji maszyn:
– Rozporządzenie Ministra Pracy i Polityki Społecznej z dnia 26 września 1997 r. w sprawie ogólnych przepisów bezpieczeństwa i higieny pracy (jednolity tekst Dz. U. z 2003 r. Nr 169, poz. 1650 z późniejszymi zmia-nami),
– PN-EN ISO 12100:2011 Bezpieczeństwo maszyn. Ogólne zasady projekto-wania. Ocena ryzyka i zmniejszanie ryzyka,
– PN-EN 953+A1:2009 Bezpieczeństwo maszyn. Osłony. Ogólne wymaga-nia dotyczące projektowania i budowy osłon stałych i ruchomych,
– PN-EN ISO 13849-1:2008 Bezpieczeństwo maszyn. Elementy systemów sterowania związane z bezpieczeństwem. Część 1: Ogólne zasady projek-towania,
– PN-EN ISO 13855:2010 Bezpieczeństwo maszyn. Umiejscowienie wypo-sażenia ochronnego ze względu na prędkości zbliżania części ciała czło-wieka,
– PN-EN 60204-1:2010 Bezpieczeństwo maszyn. Wyposażenie elektryczne maszyn. Część 1: Wymagania ogólne,
– PN-EN 60529:2003 Stopnie ochrony zapewnianej przez obudowy (Kod IP),
– PN–N–18002: 2000 Systemy zarządzania bezpieczeństwem i higieną pracy, ogólne wytyczne do oceny ryzyka zawodowego.
Kontrola spełnienia minimalnych wymagań bezpieczeństwa eksploata-cji maszyn może być dokonana z wykorzystaniem metody list kontrolnych – jest obecnie jedną z najpowszechniejszych form kontroli stanu technicznego maszyn, sposobu i warunków jej użytkowania, a także teoretycznego i praktycznego przy-gotowania pracowników do jej użytkowania w zakładach pracy. Jest to metoda dość prosta w przygotowaniu oraz późniejszym przeprowadzeniu. Jednakże osoba przeprowadzająca inspekcję powinna być odpowiednio do tego przygoto-wana. Taką osobą może być pracownik zakładu bądź ktoś z zewnątrz, związany zawodowo z daną dziedziną. Przebieg tego typu badania polega na obserwacji badanego procesu i oznaczaniu kolejno następujących po sobie zagadnień, jako zgodne (stawiając znak w rubryce „T”) lub niezgodne z wymaganiami (stawiając znak w rubryce „N”). W przypadku gdy któreś z wymagań nie dotyczy analizowa-nego przedmiotu badań, stawia się znacznik w rubryce „ND”.
Minimalne wymagania odnoszą się kolejno do takich zagadnień, jak:

292
– elementy sterownicze,– układy sterowania,– uruchamianie maszyny przez celowe zadziałanie na układ sterowania,– zatrzymanie maszyny,– zatrzymanie awaryjne,– ochrona przed zagrożeniami powodowanymi emisją gazu, oparów, płynu
lub pyłu,– zapobieganie zagrożeniom związanym z emisją lub wyrzucaniem substan-
cji, materiałów lub przedmiotów,– zabezpieczanie przed zagrożeniami powodowanymi przez spadające
i wyrzucane przedmioty,– zagrożenia powodowane utratą stateczności,– ochrona przed zagrożeniami mogącymi być następstwem oderwania lub
rozpadnięciem się części maszyn,– ochrona przed zetknięciem z elementami ruchomymi,– oświetlenie miejsc i stanowisk pracy lub konserwacji maszyn,– zabezpieczenie przed oparzeniami odmrożeniami,– sygnały bezpieczeństwa,– bezpieczeństwo przy konserwacji maszyn,– odłączenie maszyn od źródeł energii,– bezpieczny dostęp do różnych miejsc maszyny w związku z jej użytkowa-
niem,– ochrona przed pożarem, wybuchem i zagrożeniami prądem elektrycz-
nym.Mogą być również określone dodatkowe (specyficzne) wymagania, mające
zastosowanie do określonych rodzajów maszyn, np. dla ruchomego sprzętu robo-czego: samobieżnego oraz niesamobieżnego, sprzętu podnoszącego ładunki, sprzętu wykorzystywanego do tymczasowej pracy na wysokości (drabiny, ruszto-wania, wejścia liniowego i technik pozycjonowania).
Po przeprowadzeniu wnikliwej analizy sporządzany jest raport. Jeżeli wszystko jest zgodne z wytycznymi, można sporządzić dokument, w którym zawarta jest opinia prowadzącego inspekcję, mówiąca o zgodności maszyny z minimalnymi wymaganiami bezpieczeństwa. Jeżeli odnotowano uchybienia, to należy przed-stawić propozycje ich wyeliminowania. Dodatkowo można zaproponować czas realizacji wytyczonych poprawek. Po zrealizowaniu zaleceń przeprowadzana jest ponowna inspekcja kontrolna, mająca na celu sprawdzenie, czy wszystkie warunki bezpieczeństwa zostały spełnione. Następnie wystawiany jest raport o charakterze pozytywnym lub negatywnym.
Działania dostosowawcze – do każdej niezgodności przewidziane są uogól-nione działania lub indywidualnie rozwiązania zarówno techniczne, jak i organi-zacyjne.

293
Odnosząc się do punktów dotyczących układu sterowania, przewidziane są ogólne procedury dostosowujące takie, jak:
– Czytelnie oznakować elementy sterownicze z wykorzystaniem ogólnie zrozumiałych symboli bądź napisów w języku zrozumiałym operatorom. Dodatkowo wysokość zarówno napisów, jak i symboli nie powinna być mniejsza niż 3 mm.
Rys. 9.11. Przykład urządzenia do wydruku oznaczeń umieszczanych na elementach ste-rowniczych.http://www.fachowyelektryk.pl
– Oznakować odpowiednimi barwami poszczególne elementy sterownicze. Przyjęto odgórnie, że przycisk odpowiedzialny za uruchamianie obiektu jest w kolorze białym, zatrzymywanie – wyłączenie obiektu w kolorze czarnym, zaś zatrzymywanie awaryjne występuje w kolorze czerwonym na żółtym tle.
Rys. 9.12. Przykład oznaczenia pulpitu sterowniczego. Układarka poboczy drogowych Strassmayr BF 290. Fot. Strassmayr.

294
– Elementy sterownicze w razie potrzeby zabezpieczyć przed przypadko-wym uruchomieniem.
Rys. 9.13. Zabezpieczenie przed przypadkowym uruchomieniem kosy elektrycznej (trój-stopniowy system zabezpieczenia).
– Elementy sterownicze umiejscowić w taki sposób, aby operator nie był w jakikolwiek sposób narażony na zetknięcie się między innymi z rucho-mymi częściami napędu, ostrzami, narzędziami, ich krawędziami, a także z elementami będącymi stale pod napięciem elektrycznym.
– Wykorzystać rozwiązania techniczne, które zapobiegną sytuacji, w której dojdzie do samoczynnego uruchomienia. Do takich sytuacji można zali-czyć przywrócenie napięcia, opuszczenie osłony z blokadą itp. Jednak tego wymagania nie stosuje się przy ponownym uruchamianiu lub przy zasto-sowaniu zmian parametrów maszyny, o ile spowodowane są one prawi-dłowym cyklem działania urządzenia z automatycznym sterowaniem.
– Zastosowanie rozwiązań funkcjonalnych, które umożliwią spełnienie podanych wymogów. Np. wyłączenie maszyny następuje na skutek pod-niesienia osłony podczas pracy maszyny.

295
Rys. 9.14. Przykład rozwiązania funkcjonalnego, ułatwiającego pracę operatora – podnie-sienie osłony automatycznie zatrzymuje ruch obrotowy wyważanego koła.http://www.anwa-tech.pl
Jeżeli stwierdzono, że istnieje zagrożenie związane z możliwością wyrzucenia lub upadku przedmiotów maszyny, należy przede wszystkim dostosować odpo-wiednio stół roboczy, a także zainstalować burty, prowadnice, obudowy, ekrany, uchwyty obróbkowe.
Rys. 9.15. Przykład zastosowania ekranów ochronnych w tokarce NUTOOL 370W.http://www.marketpsb.pl

296
W przypadkach, gdy odnotowano zagrożenie związane z emisją gazów, opa-rów lub pyłów powinno się zastosować różnego rodzaju okapy, obudowy lub urzą-dzenia odciągu (miejscowego lub ogólnego) substancji potencjalnie niebezpiecz-nych i szkodliwych.
Identyfikując zagrożenie wynikające z bezpośredniego kontaktu z rucho-mymi elementami maszyn, należy zastosować osłony bądź urządzenia ochronne, które zapobiegną i ograniczą całkowicie dostęp do strefy niebezpiecznej. Osłony i urządzenia te powinny charakteryzować się trwałą konstrukcją, same w sobie nie powinny stwarzać zagrożenia, powinny być umiejscowione w odpowiedniej odle-głości od stwierdzonej strefy niebezpiecznej, a tym samym nie stwarzać problemu w wykonywaniu prac konserwowych czy naprawczych itp.
Rys. 9.16. Prawidłowa, kompletna osłona wałka przekazu mocy, posiada łańcuszki, które po zamocowaniu zapobiegają rotacji osłony. Maszyna dodatkowo posiada stałą osłonę w formie klosza. http://www.wir.org.pl/siewca/krus_przypomina2.htm.
Odnosząc się do źle zorganizowanych urządzeń ostrzegawczych maszyn, należy zwrócić uwagę na to, iż powinny być zrozumiałe, jednoznaczne, a przede wszystkim dostrzegalne. Przykładem może być zastosowanie sygnałów świetlnych i dźwiękowych. W przypadku sygnałów świetlnych należy ujednolicić barwy do odpowiadających im komunikatów. Barwa żółta oznacza ostrzeżenie, zbliżanie się sytuacji niebezpiecznej, czerwona – awaria rozumiana jako stan niebezpieczny, zielony – stan normalny i niebieska – stan, w którym wymagana jest koniecznie interwencja i działanie operatora.

297
W maszynach, w których zdiagnozowano ryzyko pożaru, wybuchu lub innego czynnika stwarzającego niebezpieczeństwo, można zastosować wyspecjalizowane urządzenia i instalacje na wypadek powstania któregokolwiek z wymienionych zagrożeń, np. zastosowanie zaworów bezpieczeństwa, zabezpieczenie przewodów transportujących ciecze, gazy oraz energię elektryczną.
Biorąc pod uwagę dokumentację techniczno-ruchową, a raczej jej braki, należy je uzupełnić. Zaś w przypadku braku elementarnych szkoleń pracowników, operatorów, wymaganych przy danych stanowiskach pracy, należy niezwłocznie je przeprowadzić.
Literatura
1. Jaźwiński J., Ważyńska-Fiok K.: Bezpieczeństwo systemów. Wyd. WNT War-szawa 1993.
2. Kaczmarek T.: Ryzyko i zarządzanie ryzykiem, ujęcie interdyscyplinarne. Wyd. DIFIN. Warszawa 2005.
3. Kulińska E., Dornfeld A.: Zarządzanie ryzykiem procesów. Wydawnictwo Poli-techniki Opolskiej. 2009.
4. Oznakowanie CE – Przewodnik dla przedsiębiorców. Urząd Komitetu Integra-cji Europejskiej. Warszawa 2005.
5. Pihowicz W.: Inżynieria bezpieczeństwa technicznego. Problematyka podsta-wowa. Wydawnictwa Naukowo-Techniczne. Warszawa 2009.
6. Radkowski S.: Podstawy bezpiecznej techniki. Wyd. Oficyna Wydawnicza PW. 2003.
7. Rusin A.: Awaryjność, niezawodność i ryzyko techniczne w energetyce cieplnej. Wydawnictwo Politechniki Śląskiej. 2008.


299
10. Zarządzanie eksploatacją
10.1 Strategie eksploatacji maszyn i urządzeń
Strategia eksploatacyjna to relacja między sposobami prowadzenia użytkowa-nia i obsługiwania maszyn w świetle przyjętych kryteriów.
Z kolei utrzymanie ruchu maszyn to systematyczna praca, związana z wyko-nywaniem zaplanowanych jednorazowych lub okresowych zadań w celu zapobie-gania degradacji stanu technicznego urządzeń i występowania awarii lub (gdy do nich dojdzie) usuwania ich w celu przywrócenia urządzeniom ich pełnej funk-cjonalności. Inaczej, utrzymanie maszyn to całokształt czynności technicznych, organizacyjnych, ekonomicznych, prawnych, logistycznych, mających na celu utrzymanie lub przywrócenie stanu zdatności parku maszynowego w przedsię-biorstwie. Szeroko rozumiejąc, utrzymanie ruchu to korporacyjny wysiłek ukie-runkowany na uzyskanie efektywności maszyn i urządzeń. Wymaga zarówno zarządzania, jak i technicznych umiejętności i wiedzy. Głównym celem jest uzy-skanie efektywności, niezawodności, gotowości i skuteczności produkcji i wspie-rających ją systemów (rys. 10.1).
Rys. 10.1. Miejsce utrzymania ruchu w przedsiębiorstwie.
Wzrastający udział kosztów utrzymania ruchu w kosztach przedsiębiorstwa, zmusza do poszukiwania możliwości ich zmniejszenia. Literatura podaje [12], że stosunek kosztów utrzymania ruchu do obrotu kształtuje się – w zależności od sektora gospodarki – od 4 do 12%.

300
Historycznie można wyróżnić trzy okresy różnego podejścia do utrzymania ruchu urządzeń i maszyn [6].:1. okres reaktywnego utrzymania ruchu – naprawy, remonty po pojawieniu się
uszkodzenia,2. okres prewencyjnego utrzymania ruchu – planowo-zapobiegawcze remonty/
naprawy,3. okres prognostycznego (proaktywnego) utrzymania ruchu – działania zapo-
biegawcze, monitorowanie stanu technicznego, udział operatorów urządzeń i maszyn w utrzymaniu ruchu, metody RCM, TPM, 5S itd.
Weźmy pod uwagę trzy identyczne, fabrycznie nowe pompy, które będą eks-ploatowane w różnych warunkach. Będą one również spełniały inne role. Jedna z nich będzie maszyną krytyczną dla przedsiębiorstwa, której awaria lub przestój powoduje dla firmy bardzo duże straty. Druga będzie maszyną istotną, czyli taką, której ranga jest znacznie mniejsza od maszyny krytycznej, ale w dalszym ciągu ważna. Trzecia pompa będzie maszyną zdublowaną; w przypadku awarii inne pompy mogą na jakiś czas przejąć jej funkcje (rys. 10.2). Czy dla każdej z tych maszyn przyjmiemy jednakową strategię ich utrzymania? Czy dla maszyny kry-tycznej podejście reakcyjne nie będzie zbyt ryzykowne? Z kolei czy podejście pro-aktywne w stosunku do maszyny zdublowanej będzie ekonomicznie uzasadnione?
Rys. 10.2. Trzy identyczne, fabrycznie nowe pompy – trzy różne warunki eksploatacji – różne strategie utrzymania.
Literatura [16, 20, wymienia najczęściej następujące strategie utrzymania maszyn:
• douszkodzenia(inaczej,wedługniezawodności),• wedługefektywnościekonomicznej,• planowozapobiegawcza(inaczej,wedługilościwykonanejpracy),• wedługstanutechnicznego,
MASZYNAKRYTYCZNA
MASZYNAISTOTNA
MASZYNA ZAPASOWA

301
• autoryzowanastrategiautrzymaniamaszyn,• holistycznestrategieutrzymania(RCM,TPMiinne).
Najczęściej w oparciu o jedną z powyższych strategii buduje się system utrzy-mania ruchu w przedsiębiorstwie, przy czym elementy pozostałych strategii są często jego uzupełnieniem. W praktyce przemysłowej występują więc najczęściej strategie eksploatacji mieszane, dostosowane do wymagań i warunków eksploato-wanych maszyn.
10.1.1. Strategia do uszkodzenia (wg niezawodności)Strategia ta polega na eksploatacji obiektu do chwili wystąpienia uszkodze-
nia. Nie trzeba uzasadniać, że strategia ta może być stosowana tylko wówczas, gdy następstwa uszkodzeń nie naruszają zasad bezpieczeństwa pracy i nie zwiększają kosztów eksploatacji maszyn.
10.1.2. Strategia planowo-zapobiegawcza (wg ilości wykonanej pracy)
Eksploatowanie maszyn w tej strategii jest limitowane ilością wykonanej pracy, która może być określana liczbą godzin pracy, ilością zużytego paliwa, liczbą prze-jechanych kilometrów, liczbą cykli pracy itp. Generalną zasadą w tej strategii jest zapobieganie uszkodzeniom (zużyciowym, starzeniowym) poprzez konieczność wykonywania zabiegów obsługowych w oznaczonych limitach wykonanej pracy, przed osiągnięciem granicznego poziomu zużycia.
Z punktu widzenia wykorzystania rzeczywistego potencjału użytkowego maszyny jest to strategia mało efektywna, gdyż podstawą przyjmowania dopusz-czalnej ilości pracy są ekstremalne warunki pracy. Przyjmuje się tu najniekorzyst-niejsze warunki pracy, najsłabsze ogniwa (zespoły, części) maszyny, ekstremalne obciążenia, które nie zawsze i w nierównym stopniu mogą się ujawnić podczas eksploatacji.
Strategia ta, mimo dość powszechnego stosowania, posiada szereg wad, np.:– planowanie czynności obsługowych odbywa się w oparciu o normatyw,
niezależnie od stanu technicznego maszyny, co prowadzi do wykonywa-nia zbędnych prac obsługowych i nadmiernego zużywania części i mate-riałów eksploatacyjnych,
– sztywne struktury cykli naprawczych (naprawy główne) nieodpowiada-jące rzeczywistym potrzebom,
– bardzo mała efektywność wykorzystania potencjału użytkowego maszyny,– przyjęte normatywy nie uwzględniają postępu technicznego, nie wyzwa-
lają inicjatywy personelu obsługującego, nie doskonalą systemu eksploata-cji,

302
– ustalenie optymalnego czasu poprawnej pracy maszyny jest trudne, a to prowadzi do wzrostu kosztów eksploatacji.
10.1.3. Strategia wg stanu technicznegoStrategia według stanu opiera podejmowanie decyzji eksploatacyjnych na
podstawie bieżącej oceny stanu technicznego maszyn, ich zespołów lub elemen-tów (rys. 10.3).
Rys. 10.3. Idea podejmowania decyzji eksploatacyjnych na podstawie bieżącej oceny stanu technicznego maszyn.
Umożliwia to eliminowanie podstawowych wad eksploatacji maszyn według innych, omówionych już strategii.
Aktualny stan techniczny maszyny, odwzorowany wartościami mierzo-nych symptomów stanu, jest podstawą decyzji eksploatacyjnej. Poprawna realizacja tej strategii wymaga skutecznych metod i środków diagnostyki tech-nicznej oraz przygotowanego personelu technicznego. Wymaga też przezwy-ciężenia nieufności decydentów co do efektywności takiego sposobu eksploatacji. Efekty ekonomiczne z takiego sposobu eksploatacji są niewspółmiernie wyższe niż w innych strategiach, co warunkuje powodzenie i ogromne zainteresowanie tym rozwiązaniem.
Podstawowym warunkiem powodzenia tej strategii jest dostępność prostych i skutecznych metod diagnostycznych.
10.1.4. Strategia wg efektywności ekonomicznejJest to strategia oparta o kryterium minimalnych kosztów eksploatacji
maszyn, a decyzje eksploatacyjne podejmowane są w oparciu o wskaźnik zysku.

303
Podstawą podejmowanych decyzji są dane o niezawodności, kosztach użytkowa-nia i napraw eksploatowanych maszyn.
Ważnym czynnikiem w tej strategii jest postęp techniczny, którego wysoka dynamika określa starzenie moralne maszyn, a więc czynnik wnikliwie śledzony przez potencjalnych odbiorców. Strategia ta ma zastosowanie również w sytu-acjach, gdy moralne starzenie się maszyn wyprzedza ich zużycie fizyczne.
W tej strategii kryterium efektywności ekonomicznej, a więc opłacalności eksploatacji maszyny, staje się podstawą decyzji o wycofaniu maszyny z użycia. Wyniki efektywności ekonomicznej mogą często doprowadzać do wycofywania maszyn z eksploatacji jeszcze zdatnych, lecz niezadowalających użytkownika eks-ploatacji.
Poprawne stosowanie tej strategii wymaga gromadzenia dużej ilości informa-cji statystycznych z zakresu gospodarki finansowej działu eksploatacji, znajomości modeli decyzyjnych, mierników wartości i wskaźników efektywności ekonomicz-nej oraz rachunku optymalizacyjnego.
10.1.5. Autoryzowana strategia obsługiProponowana strategia eksploatacji imiennie wskazuje na twórcę i odpowie-
dzialnego za wyrób. Producent zainteresowany jakością i późniejszym zbytem jest odpowiedzialny za wyrób od zamysłu, poprzez konstrukcję, wytwarzanie i eksplo-atację, aż do utylizacji lub likwidacji obiektu. Tym samym producent konstruuje i wytwarza swoje wyroby w oparciu o najnowsze osiągnięcia myśli technicznej, zabezpiecza swój wytwór własnym serwisem obsługowym w czasie eksploatacji, a także wyposaża obiekty w środki diagnostyczne [3].
10.1.6. Holistyczne strategie eksploatacji (przykłady).
10.1.6.1. Reliability Centered Maintenance – Utrzymanie ukierunkowane na niezawodność obiektu
Podejście RCM zostało zapoczątkowane w marynarce wojennej, energetyce jądrowej i przemyśle lotniczym USA. Szczególnie polecane w zastosowaniu do eksploatacji kosztownych obiektów technicznych oraz w sytuacji zagrożenia zdro-wia i bezpieczeństwa publicznego. Definiowane jest jako „proces stosowany do określenia wymagań co do utrzymania obiektu technicznego, w kontekście bieżą-cych zadań produkcyjnych tego obiektu”. Istotę podejścia RCM ilustruje siedem podstawowych pytań, które powinny zadać sobie służby utrzymania ruchu: I. Jakie funkcje spełnia obiekt techniczny i jakie odpowiadają im standardy osią-
gów (np. wydajności, klasy jakości produktu, obsługi klienta, kosztu eksplo-atacji, bezpieczeństwa, odpadu) w kontekście bieżących zadań produkcyj-nych?
II. Jak obiekt może zawieść w spełnianiu funkcji?

304
III. Co może być przyczyną każdego z uszkodzeń funkcjonalnych? IV. Jakie znaczenie ma każde z tych uszkodzeń? V. Co można zrobić, aby zapobiec każdemu z tych uszkodzeń? VI. Co powinno być zrobione, gdy nie można znaleźć odpowiedniego działania
zapobiegawczego? VII. Jakie mogą być skutki każdego z tych uszkodzeń?
10.1.6.2. total Productive Maintenance (tPM) – Podejście pro-produktywnościowe
Podstawą podejścia TPM jest rozpoznanie wartości relacji efekty/koszty eks-ploatacji maszyn, ze szczególnym uwzględnieniem możliwości poprawy tej relacji. Zauważono, że występuje pewna grupa czynników trudno mierzalnych, ale mają-cych duży negatywny wpływ na tę relację. Czynniki te, odnoszące się do wyko-rzystania okresu zaangażowania obiektu eksploatacji, pogrupowano w „Sześć Wielkich Strat” i zilustrowano jako część podwodną, niewidoczną, góry lodowej (rys. 10.4).
Rys. 10.4. „Sześć Wielkich Strat” identyfikowanych w strategii TPM.
Podejście to jest ukierunkowane na zapewnienie możliwie wysokiej całko-witej produktywności przedsiębiorstwa, przede wszystkim dzięki dbałości załogi o wykorzystanie czasu zaangażowania maszyn. Filary tego systemu przedstawia rysunek 10.5. TPM jest zasadą zarządzania skupioną na poziomie wydziału pro-dukcyjnego. Istotną cechą TPM jest wprowadzenie autonomicznego utrzyma-nia urządzeń i maszyn przez operatorów, czyli zintegrowanie wielu podstawo-wych czynności obsługowych z procesem produkcyjnym. Włączenie operato-rów w prace na rzecz utrzymania ruchu oraz przekazanie im odpowiedzialności

305
i uprawnień pozwala lepiej wykorzystać posiadaną przez nich wiedzę na temat urządzeń i maszyn, wzmacnia poczucie własnej wartości u operatorów i umożli-wia im świadomy udział w realizacji celów przedsiębiorstwa.
Rys. 10.5. Filary systemu TPM.
Autonomiczne utrzymanie maszyn w ruchu – Operator maszyny wykonuje codzienne zadania związane z jej utrzymaniem, dzięki czemu następuje wyelimi-nowanie uszkodzeń spowodowanych brakiem codziennej obsługi, a wyspecjalizo-wani pracownicy obsługi poświęcają więcej czasu na bardziej profesjonalne dzia-łania. Następuje w ten sposób wyeliminowanie tzw. konfliktu kierowników sys-temu eksploatacji; operator maszyny i jej obsługa działają wspólnie i razem są roz-liczani z wyników.
Ciągłe doskonalenie – Jest to wspieranie ciągłej poprawy, doskonalenia i eli-minowania strat we wszystkich systemach i procesach organizacji. To ciągłe, stop-niowe i uporządkowane doskonalenie – są to małe usprawnienia przy stosunkowo niewielkich nakładach finansowych.
Planowanie – Planowane są każdego typu działania: korygujące, korekcyjne, po uszkodzeniu.
Biuro tPM – Wdrażanie systemu TPM (podobnie jak SZJ) nigdy nie jest ini-cjatywą oddolną. Sukces może zagwarantować tylko zaangażowanie kierownictwa przedsiębiorstwa, które będzie demonstrowane i widoczne dla pracowników.
BHP i środowisko – Dbałość o BHP i ochrona środowiska prowadzić ma w zamierzeniu do braku jakichkolwiek wypadków przy pracy, czy zdarzeń wpły-wających negatywnie na środowisko.
Co oznacza system 5S? Pracownicy najczęściej interpretują praktyki 5S wyłącznie jako sprzątanie i dbanie o porządek, co jest bardzo wąskim pojmo-

306
waniem tego systemu. 5S jest w zasadzie pewną filozofią, której celem jest dobre gospodarowanie, stanowiące podstawę zarządzania. W praktyce są to ciągłe działa-nia realizowane na rzecz poprawy warunków pracy, doskonalenia jakości, obniżki kosztów, upraszczania procesów, zwiększania sprawności dostaw, poprawy wza-jemnej komunikacji, lepszego obiegu i przygotowania dokumentów, rozwoju kon-taktów z klientem (wewnętrznym i zewnętrznym), poprawy ochrony środowiska i własnego otoczenia, zwiększenia bezpieczeństwa i higieny pracy oraz nieustan-nego ulepszania na każdym stanowisku pracy (w biurze, w produkcji, usługach, w administracji, w hali, w warsztacie, w magazynie, w obsłudze finansowej itd.). Nazwa wzięła się od pierwszych liter terminów japońskich (patrz tabela 10.1). Zasada wdrażania i utrzymywania praktyk 5S przedstawiona jest na rysunku 10.6.
tab. 10.1. Terminologia 5S.
termin japoński
termin angielski
Ekwiwalentny termin angielski
termin polski
Seiri Organisation Sort PorządekSeiton Tidiness Systematise SystematycznośćSeiso Cleaning Sweep Czystość
Seiketsu Standarisation Standardise StandaryzacjaShitsuke Discipline Self-discipline Dyscyplina
Rys. 10.6. Idea praktyk 5S.
Priorytet Częstotliwość użytkowania Jak przechowywać?niski raz na rok i rzadziej w magazynie
średni raz na miesiąc/tydzień i rzadziej poza stanowiskiemwysoki codziennie na stanowisku

307
1S – SELEKCJA: posortowanie i wyselekcjonowanie rzeczy niepotrzebnych i nieużywanych, pozbycie się ich z danego miejsca lub wyrzucenie. Wartość narzę-dzia określona jego użytecznością, a nie ceną.
2S – SYSTEMATYKA: poukładanie rzeczy potrzebnych w systematyczny i uporządkowany sposób; im rzeczy są częściej używane, tym łatwiej powinny się znaleźć w zasięgu ręki lub być umieszczone w widocznym i dostępnym miejscu. Każde narzędzie na jednym i swoim miejscu.
3S – SPRZĄTANIE: dokładne wyczyszczenie, odkurzenie, wysprzątanie, odnowienie i uporządkowanie miejsca pracy i jego otoczenia.
4S – Pracownicy dyskutują i ustalają pewne standardy. Gdy są ustanowione, podlegają audytowi.
4S’ – SCHLUDNOŚĆ: ciągłe utrzymywanie w porządku, czystości i schludno-ści miejsca pracy, miejsca pobytu, jego otoczenia i oczywiście samego siebie.
5S – SAMODYSCYPLINA: stosowanie i utrzymywanie dyscypliny postę-powania i działania, szczególnie wobec siebie oraz także w stosunku do współ-pracowników; zachęcanie ich do wspólnego udziału w utrzymywaniu 5S, ucze-nie i szkolenie – stosowanie własnego przykładu, dbanie o środowisko oraz bez-pieczne warunki pracy.
10.1.6.3. RBI – Risk Based Inspection – Inspekcje w oparciu o ryzyko
Podczas eksploatacji obiektów technicznych wzrasta ryzyko pojawienia się awarii/uszkodzenia. Inspekcje umożliwiają ocenę stanu technicznego urządzeń. Zwykle inspekcje przeprowadzane są w ściśle określonych odstępach czasu. RBI jest procesem optymalizującym częstotliwość i zakres inspekcji w zależności od zaakceptowanego poziomu ryzyka [4] (rys. 10.7).
Rys. 10.7. Ryzyko jako kombinacja prawdopodobieństwo zaistnienia uszkodzenia oraz jego konsekwencji [4].

308
Ryzyko jest definiowane jako kombinacja prawdopodobieństwa zaistnie-nia uszkodzenia oraz konsekwencji takiego uszkodzenia. „Efektywna inspekcja” zmniejsza ryzyko, ponieważ redukuje prawdopodobieństwo niewykrycia uszko-dzenia i powinna być wykonana w odpowiednim czasie i w niezbędnym zakresie oraz być pewna, tzn. wykryć istniejące zagrożenie. Program inspekcji powinien zawierać części urządzenia podlegające inspekcji, poszukiwane rodzaje uszko-dzeń, rodzaje NDT (wizualne, rentgen, ultradźwięki) oraz częstotliwość jej wyko-nywania.
10.1.6.4. Koszty Cyklu Życia (LCC – Life Cycle Costs)
Cykl życia (Life cycle) – w eksploatacji okres czasu od momentu pojęcia decy-zji o zakupie obiektu technicznego do momentu jego likwidacji. Cykl życia dzieli się na kolejno następujące po sobie fazy:
– studia koncepcyjne,– projekt wstępny i sprawdzenie poprawności rozwiązania,– projekt wykonawczy,– inwestycja (wytworzenie urządzeń i budowa instalacji technicznej), – eksploatacja i utrzymanie instalacji technicznej, – likwidacja instalacji technicznej.
Koszt Cyklu Życia (Life Cycle Cost) obejmuje obliczenie przewidywanych kosztów w cyklu życia urządzenia. Koszty te związane są z nabyciem i posiada-niem obiektu technicznego (rys. 10.8).
Rys. 10.8. Kwalifikacja kosztów cyklu życia.

309
10.1.7. Wybór strategii eksploatacjiWybór strategii dopasowanej do potrzeb przedsiębiorstwa wymaga przepro-
wadzenia wielu badań i analiz, związanych nie tylko z samą maszyną, ale również z organizacją produkcji, logistyką, planowaniem. Przykładowo na rysunku 10.9 przedstawiono rozkład trwałości dwóch grup łożysk typu A i B.
Przykład dotyczy sytuacji, w której przedsiębiorstwo eksploatuje maszyny z łożyskami grupy A i grupy B o jednakowej średniej trwałości, ale różnych roz-kładach. W przypadku łożysk grupy B dokonanie planowej wymiany wszystkich łożysk po 4,7 latach eksploatacji będzie decyzją optymalną z punktu widzenia minimalizacji liczby awarii już powstałych oraz maksymalizacji liczby awarii, któ-rych dzięki wcześniejszej wymianie łożysk uda się uniknąć. W przypadku zasto-sowania tej strategii dla łożysk grupy A, decyzja o planowej wymianie wszyst-kich łożysk w jakiejkolwiek, jednakowej chwili będzie niekorzystna: wcześniejsza wymiana spowoduje wymianę wielu łożysk jeszcze zdatnych, wymiana późniejsza będzie przyczyną powstania wielu uszkodzeń i związanych z nimi przestojów.
W tym wypadku optymalną strategią będzie strategia wg stanu technicznego.
Rys. 10.9. Rozkład trwałości łożysk grupy A i B.
Przeprowadzenie odpowiednich badań trwałościowych, a w późniejszym eta-pie zaprojektowanie odpowiedniego sytemu diagnostycznego, leży jednak prak-tycznie poza zasięgiem przeciętnego MŚP i to jest jedna z przyczyn, dla których problem utrzymania maszyn nie jest w MŚP identyfikowany.

310
10.2. Efektywność eksploatacji
10.2.1. Wskaźniki efektywności„...nie można udoskonalić czegoś, czego nie można zmierzyć…”
Wszelkiego rodzaju działania, w tym również utrzymanie maszyn, będą mało skuteczne, jeśli nie zostanie sprecyzowany jasny cel tych działań oraz mierniki, przy pomocy których możliwe będzie monitorowanie stopnia osiągania postawio-nych celów. Generalnie słuszne są dwie zasady racjonalnego gospodarowania:I. największego efektu, gdzie przy danych nakładach należy maksymalizować
stopnie realizacji celu,II. najmniejszego nakładu, gdzie przy założonym stopniu realizacji celu minima-
lizujemy koszty.
Nie jest zatem możliwe jednoczesne uzyskiwanie coraz większych wartości współczynników gotowości, niezawodności przy jednoczesnym obniżaniu nakła-dów na przeglądy maszyn, inspekcje, remonty itd. Ta oczywista prawda często jest jednak niedostrzegana, czego dowodem może opisywany wcześniej konflikt kie-rowników eksploatacji. W teorii i praktyce oceny efektywności eksploatacji posłu-gujemy się następującymi wskaźnikami:
1. Wskaźnik wykorzystania (Kw) – wskazuje, w jakim stopniu wykorzystywany jest zasób w stosunku do dostępnego czasu wykorzystania.
2. Wskaźnik gotowości (Kg) – wskazuje, w jakim stopniu zasób jest gotowy do wykorzystania.
3. Wskaźnik użytkowania (Ku) – wskazuje, w jakim stopniu zasób jest użytko-wany.
4. Wskaźnik przestoju (KPR) – wskazuje, w jakim stopniu zasób jest niewykorzy-stywany z powodu jego niezdatności.

311
5. Wskaźnik postoju (KPO) – wskazuje, w jakim stopniu zasób jest niewykorzy-stywany z powodu braku zapotrzebowania na działanie zasobu.
6. Wskaźnik wydajności (W) – definiowany jako ilość wykonanej pracy do roz-patrywanego czasu oceny.
Należy zwrócić uwagę, że właściwie zbudowany model systemu eksploata-cji z odpowiednio do potrzeb firmy zidentyfikowanym repertuarem i bazą eks-ploatacyjną pozwala na budowę i wykorzystanie całej gamy mierników. Przy-kładowo, jeśli w repertuarze eksploatacyjnym uwzględnimy stany „oczekiwa-nia na obsługę” i „obsługi”, możemy wówczas mierzyć i analizować straty czasu związane z tymi zdarzeniami w stosunku do innych wyróżnionych stanów.
10.2.2. ocena Efektywności Eksploatacji wg metody oEE (overall Equipment Effectivness)
W idealnych warunkach maszyny i urządzenia mogłyby pracować przez 100% założonego czasu pracy, ze 100% wydajnością i z finalnym produktem w 100% zgodnym z wymaganiami. W warunkach rzeczywistych mamy do czynienia z trzema kategoriami strat, które zgodnie z ideą TPM (Total Productive Mainte-nance) tworzą tzw. sześć istotnych strat (six big losses), tab. 10.2.
tabela. 10.2. Sześć „wielkich strat” wg strategii TPM.
Kategoria strat Strata
straty gotowości(wyłączenia maszyny)
Uszkodzenia maszyn.Ustawienia, regulacje, wymiana narzędzia roboczego
itd.straty wydajności
(straty prędkości roboczych)Prędkości jałowe, drobne przestoje.Zredukowane prędkości robocze.
straty jakości(defekty produktów finalnych)
Defekty produktów i ich naprawa.Defekty produktów i ich naprawa.
Analiza OEE rozpoczyna się od określenia całkowitego czasu produkcji, w którym maszynę można wykorzystać [http://www.oee.pl/oee.pdf]. Od tego czasu należy odjąć wszystkie planowane postoje, których nie uwzględniamy w analizie OEE ze względu na to, że w tym czasie nie było intencji do prowadze-nia produkcji. Pozostały czas jest zwany planowanym czasem produkcji. Ana-

312
lizę rozpoczyna się od planowanego czasu produkcji i obejmuje analizę wszyst-kich wyżej wymienionych kategorii strat. Straty gotowości obejmują wszystkie zdarzenia, które powodują zatrzymanie procesu produkcji. Przykładami są: awa-ria, braki materiałów, przezbrojenia. Pozostały dostępny czas jest to czas opera-cyjny maszyny. W czasie operacyjnym uwzględnia się straty wydajności, spowo-dowane mniejszą prędkością procesów produkcyjnych Przykładem takiego prze-stoju jest praca na biegu jałowym lub inne mikroprzestoje. Pozostały czas to czas operacyjny netto. ostatnim składnikiem współczynnika oEE są straty jakości – straty z powodu wyprodukowania produktów niespełniających wymagań jako-ściowych (rysunek 10.10).
Całkowity czas pracyGotowość A – czas pracy zaplanowany
brak produkcji
B – czas produkcji uszkodzenia, ustawienia, wymiany narzędzi
Wydajność C – wydajność zaplanowanaD – wydajność rzeczywista drobne prze-
stoje, zredu-kowania pręd-kości
Jakość E – liczba produktów STRATY EFEKTYWNOŚCI WYKORZYSTANIA URZĄ-DZENIA
F – liczba produktów zgodnych
defekty pro-duktów, ich naprawa, straty rozru-chu
OEE = B/A x D/C x F/E
Rys. 10.10. Idea pomiaru wskaźnika OEE.

313
OEE jest zatem ogólnym miernikiem efektywności wykorzystania maszyn i urządzeń, uwzględniającym efektywność działania wszystkich „zainteresowa-nych” stron:
– dział utrzymania maszyn (straty czasu z tytułu awarii, mniejsza wydajność lub straty jakościowe wynikające ze stanu technicznego itd.),
– dział produkcji (przezbrojenia maszyny, przygotowanie produktu, organi-zacja pracy w dziale, dbałość o stanowiska pracy),
– dział planowania, marketingu (ustalenie wielkości i rodzaju asortymentu),– inne działy odpowiadające za logistykę, zakupy surowców, szkolenia,
organizację przedsiębiorstwa, konstrukcję i dobór maszyn i urządzeń do linii technologicznych itd.
OEE „mierzy” wszelkie aspekty dotyczące efektywności wykorzystania urzą-dzeń i maszyn, zarówno jakościowe (wykonywanie pracy poprawnie), jak i ilo-ściowe (wykonywanie poprawnych prac). Jest to zatem współczynnik globalny, który w zależności od potrzeb może być poddawany dalszej, szczegółowej analizie w celu znalezienia obszarów potencjalnych usprawnień funkcjonowania przed-siębiorstwa. Szczególnie użyteczne do tego celu wydają się być metody diagramu Ishikawy, analizy Why-Why czy Root Cause Analysis. Używanie wskaźnika OEE wymaga jednak pewnej ostrożności. Zakładając przykładowo, że w danym okre-sie pracy uzyskujemy wartości wskaźników gotowości, wydajności i jakości odpo-wiednio 0,95%, 85% oraz 98%, a w kolejnym okresie 98%, 85% i 90%, to w obu przypadkach otrzymujemy tę samą wartość OEE=0,79. Analizując wartość wskaź-nika tylko w aspekcie jego całkowitej wartości, nie można dostrzec informacji o wzrastającej wydajności procesu, odbywającej się kosztem jakości produktu.
10.2.3. Pomiary efektywności eksploatcji wg standardu „Maintenance – Key Performance Indicator”
W standardzie tym [13] zdefiniowno: 24 wskaźniki dotyczące ekonomicz-nych aspektów utrzymania maszyn, 21 wskaźników o charakterze technicznym i 26 organizacyjnych. Wyznaczanie tych wskaźników zgodnie z podaną w pro-pozycji standardu metodą a następnie wzajemne ich porównywanie (w ramach benchmarkinku zarówno zewnętrznego, jak i wewnętrznego), pozwala na ocenę przyjętej strategii w stosunku do własnych, wcześniejszych wyników, jak również wyników otoczenia i konkurencji.
Dokument definiuje szereg mierników efektywności systemu utrzymania maszyn (obiektów), których zadaniem ma być wsparcie procesów zarządzania eksploatacją obiektów technicznych. Większość wskaźników ma charakter ogólny i nadaje się do wykorzystania w większości rodzajów przemysłów.
Wskaźników tych należy używać do [13]:– pomiarów statusu,– porównań (wewnętrzny i zewnętrzny benchmarking),

314
– diagnozy (analizy słabych i mocnych stron systemu utrzymania obiektów),– określania zadań i celów,– planowania działań doskonalących,– ciągłego pomiaru – kontroli rozwoju,– motywowania personelu.
terminologia dokumentu i definicji wskaźników oparta jest na standar-dzie EN 13306 „Maintenance terminology”.
Efektywność systemu utrzymania maszyn (SUM) jest rezultatem procesu wykorzystania pewnych zasobów do utrzymania obiektu w stanie (lub przywróce-nia do tego stanu), w którym może on realizować swoje funkcje. Może być wyra-żona w kategoriach rezultatów osiągniętych lub oczekiwanych.
Efektywność SUM zależy od wielu czynników – wewnętrznych i zewnętrz-nych (tabela 10.3) takich, jak lokalizacja przedsiębiorstwa, jego rozmiar, wiek, kultura techniczna i organizacyjna itd., i jest związana z realizowaniem różno-rakich działań korekcyjnych, prewencyjnych, doskonalących wykorzystujących pracę, materiały, informacje, narzędzia, metody.
tabela 10.3. Niektóre czynniki wpływające na efektywność SUM.
czynniki zewnętrzne czynniki wewnętrzne– lokalizacja,– kultura społeczeństwa,– przepisy prawne,– koszty pracy,– sektor/branża,
– sytuacja na rynku,– kultura organizacji,– rygory produkcyjne,– różnorodność produkcji,– rozmiar firmy,– wykorzystanie urządzeń,– wiek urządzeń
Wskaźniki SUM zostały ustrukturyzowane w trzy kategorie: ekonomiczne (oznaczone pierwszą literą „E”), techniczne (oznaczone pierwszą literą „T”) i organizacyjne (oznaczone pierwszą literą „O”) w celu uwzględnienia wszystkich aspektów utrzymania maszyn. Dodatkowy podział na poziomy (pierwszy, drugi i trzeci) umożliwia identyfikację wskaźników ze względu na ich poziom szczegó-łowości (tabela 10.4).

315
tabela 10.4. Strukturyzacja wskaźników efektywności utrzymania maszyn.
Wskaźniki ekonomiczne
Wskaźniki techniczne
Wskaźniki organizacyjne
Poziom I – ogólny (np. przedsiębiorstwo)
E1, E2, E3, E4, E5, E6
T1, T2, T3, T4
O1, O2, O3, O4, O5, O6, O7, O8
Poziom II – np. linia tech-nologiczna
E7, E8, E9, E10, E11, E12, E13, E14
T5, T6 T7, T8, T9, T10, T11, T12, T13, T14, T15, T16, T17, T18, T19, T20, T21
Poziom III – szczegółowynp. obiekt
E15, E16, E17, E18, E19, E20, E21, E22, E23, E24
O9, O10 O11, O12, O13, O14, O15, O16, O17, O18, O19, O20, O21, O22, O23, O24, O25, O26
Niektóre wskaźniki ekonomiczne wg standardu EN 13306 „Maintenance ter-minology”.
%1001 xVK
EARV
C=KC Całkowity koszt utrzymania maszyn.VARV Wartość odtworzenia majątku technicznego.
%100''2 xWK
E C=
KC Całkowity koszt utrzymania maszyn (patrz E1).W’’ Wartość produkcji pomniejszona o koszty surow-
ców, materiałów, podstawowych usług, a powiększona o zewnętrzne koszty utrzymania maszyn. (Wartość Dodana Plus Zewnętrzne Koszty Utrzymania)
%1003 xI
KE C=
KC Całkowity koszt utrzymania maszyn (patrz E1).I Ilość wyrobów wytworzonych przez obiekt (tony, litry,
itd.) [wydajność]
KC Całkowity koszt utrzymania maszyn (patrz E1).KPS Całkowity koszt przetworzenia surowców/materiałów
w gotowy wyrób przez obiekt techniczny, wyłączając koszty surowców i pakowania materiałów pomocniczych.
KCP Całkowite koszty utrzymania (patrz E1) powiększone o koszty przestojów spowodowanych działaniami dotyczą-cymi utrzymania obiektów w ruchu.
I Ilość wyrobów wytworzonych przez obiekt (tony, litry, itd.) [wydajność]

316
G Czas, w jakim obiekt jest w stanie wykonywać swoje funk-cje w danych warunkach, w danej chwili lub danym prze-dziale czasu, zakładając, że zapewnione są zewnętrzne zasoby.
KC Całkowity koszt utrzymania maszyn (patrz E1).
KPK Koszty wszystkich zakontraktowanych prac.
Niektóre wskaźniki techniczne wg standardu EN 13306 „Maintenance termi-nology”.
TC Przedział czasu, w którym obiekt realizuje swoje funkcje (EN 13306 9.3).
TW Przedział czasu, w którym obiekt jest wyłączony z użyt-kowania ze względu na działania związane z utrzyma-niem obiektu w ruchu.
TFG Faktyczny czas gotowości w wymaganym okresie. Czas gotowości – przedział czasu, w którym obiekt jest w sta-nie gotowości.Stan gotowości – stan, w którym obiekt może realizować swoje funkcje, zakładając, że dostępne są odpowiednie zewnętrzne zasoby.
TWU Przedział czasu wymagany przez użytkownika, w którym obiekt powinien być w stanie realizować swoje funkcje.
TU
T S=3
US Liczba uszkodzeń niosących konsekwencje dla środo-wiska, wynikających z działań (lub zaniechania działań) związanych z utrzymaniem obiektów w ruchu.
T Rozważany przedział czasu – rok, miesiąc, itd.
TUT L=4
UL Liczba wypadków przy pracy, wynikających z działań (lub zaniechania działań) związanych z utrzymaniem obiektów w ruchu.
T Rozważany przedział czasu – rok, miesiąc, itd.
%1005 xTT
TT
AC
C
+=
TC Przedział czasu, w którym obiekt realizuje swoje funkcje (EN 13306 9.3).
TA Całkowity czas przestoju, wynikający z awarii obiektów.

317
Niektóre wskaźniki organizacyjne wg standardu EN 13306 „Maintenance ter-minology”.
ZZ
O U=1
ZU Personel (własny, bezpośredni i pośredni (patrz E8) wykonujący działania związane z utrzymaniem obiektów w ruchu.
Z Liczba zatrudnionych.
ZPU Personel (własny, pośredni) wykonujący działania zwią-zane z utrzymaniem obiektów w ruchu.
ZU Personel (własny, bezpośredni i pośredni) wykonujący działania związane z utrzymaniem obiektów w ruchu.
ZPU Personel (własny, pośredni) wykonujący działania zwią-zane z utrzymaniem obiektów w ruchu.
ZBU Personel (własny, bezpośredni – patrz E8) wykonujący działania związane z utrzymaniem obiektów w ruchu.
PB
O
RR
O =4
RO Liczba roboczogodzin dotycząca działań związanych z utrzymaniem obiektów w ruchu, wykonana przez użyt-kowników lub operatorów.
RPB Liczba roboczogodzin dotycząca działań związanych z utrzymaniem obiektów w ruchu, wykonana bezpośredni personel.
Czm Liczba części zamiennych, dostarczonych przez dostaw-ców, zamówionych na cele utrzymania obiektów w ruchu.
Jakkolwiek pomiar efektywności wdrożonego systemu utrzymania maszyn jest trudny, to jako ogólną zasadę należy zawsze przyjmować ideę przedstawioną w tabeli 10.5, w której zawarto analogie między różnymi strategiami utrzymania maszyn i urządzeń w ruchu a działaniem człowieka w trosce o własne zdrowie.
tabela 10.5. Strategie utrzymania maszyn w analogii do postępowania człowieka.
strategia utrzymania maszyn i urządzeń
wymagane techniki i środki
analogia do ludzkiego organizmu
pro-aktywna monitorowanie i eliminacja przyczyn źródłowych, np. 5S
monitorowanie poziomu choleste-rolu i ciśnienia krwi z odpowiednią
dietą i ćwiczeniami fizycznymi
predyktywna, prewencyjna
monitorowanie drgań, temperatury, osiowania
regularne pomiary ciśnienia, cholesterolu, EKG

318
planowo--zapobiegawcza
okresowa wymiana elementów okresowe wizyty u lekarza
do uszkodzenia budżet na części zamienne i nieplanowane przestoje atak serca, transplantacja
10.3. Zarządzanie eksploatacją – Narzędzia wspierające procesy podejmowania decyzji eksploatacyjnych
Podejmowanie decyzji jest to jedna z funkcji zarządzania i proces, polega-jący na zbieraniu i przetwarzaniu informacji o przyszłym działaniu, i w rezultacie świadomy, nielosowy wybór jednego z rozpoznawanych i uznanych za możliwe wariantów przyszłego działania. Teoria decyzji to wspólny obszar zainteresowań wielu różnych dziedzin nauki, obejmujący analizę i wspomaganie procesu podej-mowania decyzji. Metody teorii decyzji wykorzystuje się wszędzie tam, gdzie pod-jęcie decyzji jest z pewnych powodów trudne, ale ich zastosowanie może przy-nieść wymierne korzyści, na przykład:1. duża liczba możliwych wariantów,2. skomplikowana sytuacja decyzyjna lub proces decyzyjny,3. możliwość wysokich korzyści lub dużych strat.
W przypadku eksploatacji obiektów technicznych spotykamy najczęściej siedem rodzajów praktycznych problemów, do których najczęściej stosuje się metody teorii decyzji. Są to problemy: zapasów, podziału, kolejek, kolejności, trasy, wymiany oraz konkurencji.
Problemy zapasów – równoważenie przeciwstawnych celów. Jednostkowe koszty wyrobów zazwyczaj maleją w miarę zwiększania partii zamawianych (czy wytwarzanych u siebie). Pożądane zatem wydają się duże zapasy. Z drugiej strony zapasy takie wiążą kapitał, który można by zainwestować w inny sposób, wymagają też większych nakładów na magazynowanie i ubezpieczenia. Podobnie potrzeba utrzymywania dostatecznie dużych zapasów dla sprostania popytowi jest sprzeczna z potrzebą unikania nadmiernego ich gromadzenia.
Problemy podziału – istnieją dwa powszechne rodzaje problemów podziału. W pierwszym rodzaju można w rozmaity sposób kojarzyć zasoby, aby wykonać określone żądanie. Na przykład w zakładzie montażowym wytwarza się tę samą liczbę wyrobów przy wielu pracownikach i małej liczbie maszyn lub przy większej liczbie maszyn, a mniejszej pracowników. Problem podziału polega na znalezie-niu najlepszej – w aspekcie kosztów – kombinacji maszyn i pracowników. Drugi

319
rodzaj problemów podziału występuje wtedy, gdy nie ma środków wystarczają-cych na wykonanie wszystkich pożądanych zadań.
Problemy kolejek – wiążą się z zaprojektowaniem urządzeń zaspokajających zapotrzebowanie na usługi, np. w stacjach benzynowych, centralach telefonicz-nych, kasach supersamów czy systemach rezerwacji biletów lotniczych.
Problemy kolejności – decyzje dotyczą kolejności wykonywania poszcze-gólne części określonego zadania. Na przykład wyrób na linii montażowej, przed całkowitym jego zakończeniem, musi przejść przez kilka stanowisk roboczych. Problem polega na takim ustaleniu kolejności stanowisk roboczych, aby zmini-malizować czas bezczynności i zrównoważyć czas pracy wszystkich stanowisk.
Problemy trasy – należy określić, kiedy (w jakiej kolejności) należy wykonać poszczególne części zadania. Na przykład trzeba przewieźć ładunek z punktu A do punktu B przez kilka innych punktów po drodze. Jaka trasa jest najszybsza i najtańsza?
Problemy wymiany – niektóre kosztowne rzeczy zużywają się w czasie lub stają się przestarzałe, na przykład maszyny lub ciężarówki. Jeśli przetrzymuje się je zbyt długo, są niesprawne, a koszty ich utrzymania wzrastają (mogą np. wyma-gać zwiększonej konserwacji). Jednakże ich wymiana może również wiązać się z dużymi kosztami. Jednym z problemów jest zatem ustalenie, kiedy należy je wymienić. Inny rodzaj problemu wymiany wiąże się ze znaczną liczbą niedro-gich elementów, jak na przykład żarówki, które funkcjonują do określonej chwili. Problem kierownika polega na tym, że musi zdecydować, czy wymieniać każdą z nich w momencie uszkodzenia, czy też poczekać do chwili, gdy przestanie dzia-łać określona ich liczba i wtedy wymienić je jednocześnie. Typowym przykładem jest opracowanie terminarza wymiany żarówek na moście lub na lotnisku.
Problemy konkurencji – dwie (lub więcej) organizacje dążą do osiągnięcia sprzecznych z natury celów – na przykład, kiedy każda chce zwiększyć swój udział w rynku, a wzrost ten przez jedną z nich z konieczności oznacza zmniejszenie udziału innych. Decyzje podjęte przez jednego konkurenta wpływają na decyzje innych, a z kolei same podlegają wpływom ich decyzji. Problem polega na wyszu-kaniu takich strategii i decyzji, które maksymalizują własne zyski i zminimalizują straty.
Wspomaganie się odpowiednimi narzędziami zawsze powoduje większą sku-teczność i efektywność pracy. Tak jest również w przypadku podejmowania decy-zji eksploatacyjnych. Narzędzia wspierające te procesy można podzielić na mate-matyczne oraz heurystyczne. Najczęściej wykorzystywane narzędzia matema-tyczne to modele programowania liniowego, dynamicznego, marginalnego i sie-ciowego, modele kolejek, teoria gier, teoria masowej obsługi oraz różnego rodzaju modele symulacyjne.

320
Heurystyka z kolei to umiejętność (sztuka) wykrywania nowych faktów i związków miedzy nimi oraz formułowania hipotez. Jest przeciwieństwem do logiki, która uczy je udowadniać. Jest to podejście majce na celu twórcze rozwią-zanie problemu zarówno logicznego, kierowniczego, jak i matematycznego (np. rozwiązanie zadania, zbudowanie definicji).
Niżej podany podział narzędzi na metody heurystyczne i matematyczne nie ma charakteru zamkniętego i może być modyfikowany.
10.3.1. Statystyczna kontrola procesów
10.3.1.1. Podstawowe definicje
Pojęcie jakości jest bardzo obszerne i może dotyczyć wielu aspektów wydajno-ści, niezawodności, trwałości, kompatybilności, czyli ogółu właściwości procesu lub produktu wiążących się z jego zdolnością do zaspokojenia potrzeb stwierdzo-nych lub oczekiwanych, na potrzeby. Ponieważ zmienne występujące w procesie sterowania jakością są zmiennymi losowymi, rola metod statystycznych odgrywa w niej dominującą rolę. Podstawowe znaczenie mają metody i narzędzia należące do tzw. wielkiej siódemki SPC (magnificent seven od Statistical Process Control), w skład której wchodzą [5]:
1. diagram przebiegu procesu (process flow diagram),2. karta kontrolna (control chart),3. arkusz kontrolny (checksheet),4. diagram Ishikawy (cause and defect diagram, Fishbone diagram),5. diagram Pareto (Pareto diagram),6. histogram (histogram),7. punktowy diagram korelacji (scatter plot).
Istotną rolę w działaniach sterowania jakością odgrywają karty kontrolne. Są to podstawowe i najwcześniejsze historycznie narzędzia SPC. Należą do metod bieżących kontroli jakości, a jednocześnie przy właściwym stosowaniu mają bar-dzo duże znaczenie przy poprawie jakości produkcji. Praktyczne zastosowanie kart kontrolnych nastąpiło w 1924 roku w Bell Laboratories. Pomysł kart zawdzię-czamy Walter’owi Shewhart’owi, od którego nazwiska nazywa się je często kartami kontrolnymi Shewhart’a (KKS). Wykorzystują one prawa rachunku prawdopodo-bieństwa i statystyki matematycznej, pozwalają wychwycić rozregulowanie pro-cesu. Jeśli są takie sygnały, wówczas podejmuje się decyzję o ewentualnym prze-rwaniu produkcji i przeprowadzeniu procesu regulacji.
Niniejszy rozdział poświęcony jest głównie kartom kontrolnym. Zanim jed-nak dojdziemy do szczegółowego ich omówienia, należy zapoznać się z następują-cymi definicjami (PN-ISO 8258-1+AC1:1996):

321
STATYSTYCZNA KONTROLA JAKOŚCI – kontrola wyrywkowa, w któ-rej metody statystyczne są stosowane do wnioskowania o jakości partii produktu lub stabilności procesu technologicznego na podstawie wyników badań jednej lub wielu próbek.
STATYSTYCZNE STEROWANIE JAKOŚCIĄ – część sterowania jakością korzystająca z technik statystycznych.
AKCEPTOWANY POZIOM JAKOŚCI (AQL) – w przypadku rozpatrywa-nia ciągu partii dostarczanych sukcesywnie taki poziom jakości, który w kon-troli wyrywkowej jest wartością graniczną zadowalającej średniej jakości procesu. Wartość AQL wybierana jest zwykle w zależności od fizycznych i ekonomicznych wymuszeń takich, jak naturalne granice procesu (określające tolerancje, które mogą być zbiorem dotyczącym różnych parametrów technicznych) i od kosztów kontroli zbilansowanych z kosztami obsługi gwarancyjnej.
GRANICZNY POZIOM JAKOŚCI (LQL) – w przypadku ciągu partii dostar-czanych sukcesywnie jest to taki poziom jakości, który w kontroli wyrywkowej jest wartością graniczną niezadowalającej średniej jakości procesu.
STAN STATYSTYCZNIE UREGULOWANY – stan, w którym zmienność między obserwowanymi wynikami badania próbki może być przypisana zespo-łowi przyczyn losowych i który nie ulega zmianom w czasie. Taki zespół przyczyn losowych odzwierciedlany jest przez wyniki otrzymane z próbek losowych pro-stych pobranych z populacji.
ZMIENNOŚĆ SYSTEMATYCZNA – odchylenia nielosowe zachodzące w procesie stabilnym (np. zachodzące w regularnych odstępach).
PROCES UREGULOWANY; PROCES STABILNY – proces, w którym każda z miar jakości (np. wartość średnia i rozrzut lub frakcja niezgodnych jednostek lub średnia liczba niezgodności produktu lub usługi) jest w stanie statystycz-nie uregulowanym. (Statystyczne uregulowanie procesu jest zwykle śledzone za pomocą kart kontrolnych).
KARTA KONTROLNA – wykres z zaznaczoną górną i/lub dolną granicą kontrolną, na którym rejestrowane są wartości pewnej miary statystycznej, uzy-skane z serii próbek lub podzbiorów, zwykle w porządku ich występowania w cza-sie lub w porządku numerów próbki. Często na karcie występuje linia centralna, która ułatwia śledzenie trendu, jaki wykazują rejestrowane wartości względem granic kontroli. Dla niektórych kart kontrolnych granice wyznacza się na pod-stawie danych otrzymanych z próbek lub podzbiorów rejestrowanych w karcie, dla innych – na podstawie przyjętych wartości znormalizowanych lub podanych w specyfikacji, stosowanych w miarach statystycznych rejestrowanych na karcie.
GRANICE KONTROLNE – na karcie kontrolnej granica, poniżej której (górna granica) lub powyżej której (dolna granica), lub granice pomiędzy którymi z bardzo dużym prawdopodobieństwem znajduje się wartość rozpatrywanego parametru statystycznego, jeżeli proces jest w stanie statystycznie uregulowanym.

322
LINIA CENTRALNA – linia na karcie kontrolnej reprezentująca wartość średnią rejestrowanej miary statystycznej, obliczonej na podstawie serii obserwa-cji w długim czasie lub reprezentująca założoną z góry wartość tej miary.
Wyniki pomiarów jednej charakterystyki wyrobu zawsze (mniej lub bardziej) różnią się pomiędzy sobą, ale tworzą one wzorzec, który (o ile jest stabilny) może być opisany jako rozkład (rys. 10.11).
Rys. 10.11. Graficzna interpretacja identyfikacji rozkładu na podstawie obserwacji kolej-nych wartości wielkości badanej. Źródło: Opracowanie własne.
Rozkłady mogą się różnić pod względem:– umiejscowienia,– rozrzutu,– kształtu (rys. 10.12).
Rys. 10.12. Graficzne zobrazowanie różnic w rozkładach wartości wielkości badanej.
ZWYKŁE PRZYCZYNY ZMIENNOŚCI odnoszą się do wielu źródeł zmien-ności w procesie, który ma stały i powtarzalny w czasie rozkład. Jest to zwane sta-

323
nem statystycznej kontroli. Przyczyny zwykłe zachowują się tak, jak stabilny sys-tem przypadkowych przyczyn. Jeżeli występują przyczyny zwykłe zmienności i nie zmieniają się, to wynik procesu (wyrób) jest do przewidzenia (rys. 10.13).
Rys. 10.13. Proces stabilny i pod kontrolą.
PRZYCZYNY SZCZEGÓLNE (nieprzypadkowe) odnoszą się do wszelkich czynników powodujących zmienności, które nie zawsze oddziałują na proces. To znaczy, że gdy występują, to powodują całkowitą zmianę rozkładu procesu. Do czasu, kiedy zostaną zidentyfikowane wszystkie przyczyny szczególne zmienności i nie zostaną podjęte odpowiednie działania w stosunku do nich, będą one powo-dować niestabilność procesu (rys. 10.14).
Rys. 10.14. Proces niestabilny – nie można przewidzieć kształtu, rozrzutu i wartości śred-niej.
Należy jeszcze zauważyć, że może być przypadek, w którym proces jest sta-bilny, ale niezdolny do spełniania wymagań, zmienność, będąca wynikiem zwy-kłych przyczyn, jest nadmierna (rys. 10.15).

324
Rys. 10.15. Proces stabilny, ale niezdolny do spełnienia wymagań – rozrzut wartości obserwacji jest za duży.
10.3.1.2. Karty kontrolne Shewharta
Skuteczną metodą diagnozowania stanów statystycznego uregulowania pro-cesu produkcyjnego jest wykorzystanie Kart Kontroli Shewharta (KKS). Ta metoda diagnozowania prowadzi do uporządkowanego i czytelnego tworzenia zbioru liczb, który w prosty sposób można analizować. Dodatkowo przedstawie-nie pomiarów za pomocą wykresów, z zamieszczonymi granicami kontrolnymi, pozwala czytelnie obrazować przebieg stanu procesu kontrolnego, w którym łatwo jest stwierdzić niezgodności. Mając dany obiekt, dla którego tworzona będzie kon-trola procesu produkcyjnego, należy wybrać parametr pozwalający diagnozować prawidłowość przebiegu procesu.
Istnieje kilka rodzajów Kart Kontroli Shewharta (KKS). Obszar stosowania oraz charakterystykę kart przedstawia tabela 10.6.
W przypadku kontroli procesu produkcyjnego, seryjnego stosuje się kartę X-R. Wyróżnia się karty oceny liczbowej cech procesu oraz alternatywnej oceny procesów. Głównymi parametrami Kart Kontroli Shewharta dla cech procesów ocenianych liczbowo są parametry charakteryzujące położenie rozkładu cechy procesu oraz parametry charakteryzujące rozrzut cechy procesu. Położenie roz-kładu cechy procesu w KKS charakteryzuje wartość średnia ( ) cechy lub mediana (M). Natomiast rozrzut cechy procesu określa rozstęp (R) bądź odchy-lenie standardowe (S). Karty Kontrolne Shewharta zawierają określone statystycz-nie granice kontrolne oraz linię centralną:
– górna granica kontrolna – UCL,– dolna granica kontrolna – LCL,– linia centralna – CL.

325
tabela 10.6. Typy KKS i ich charakterystyki [5].
typ Karty Charakterystyka karty obszar zastosowania
Karta RX -Duża czułość na zmiany stanu procesu.
Do oceny jakości procesów pro-dukcji seryjnej wyrobów.
Karta sX -
Większa pracochłonność obliczeń, muszą być duże próbki. Dokład-niejsza diagnoza w stosunku do Karty RX - .
Do oceny jakości procesów pro-dukcji seryjnej wyrobów precyzyj-nych.
Karta M – RŁatwość obliczeń, jest mniej precy-zyjna w stosunku do Kart RX - i sX - .
Do oceny jakości procesów pro-dukcji małych serii.
Karta Xi (pojedynczych obserwacji)
Prostota w prowadzeniu, mała pre-cyzja.
Gdy koszty pobierania próbek są duże (np. badania niszczące).
Karta – p Nie jest czuła na zmienną liczność próbek.
Diagnozowanie jakości procesu na podstawie frakcji jednostek nie-zgodnych.
Karta – np Daje dobre rezultaty, gdy zacho-wana jest stała liczność próbek.
Diagnozowanie jakości procesu na podstawie frakcji jednostek nie-zgodnych.
Karta – cDaje dobre rezultaty, gdy zacho-wana jest jednakowa liczność pró-bek badanych elementów
Diagnozowanie jakości procesów na podstawie liczby niezgodności na jednostkę wyrobu.
Karta – u
Nie musi być zachowany warunek Karty – c. Jest to Karta propor-cji, stosunek liczby wad do liczby badanych jednostek.
Diagnozowanie procesu na pod-stawie liczby niezgodności w wyrobie.
Granice te oraz linię centralną zaznacza się na karcie kontrolnej (rys. 10.16). Często na KKS zaznacza się również górną linię ostrzegawczą (UWL), dolną linię ostrzegawczą (LWL) oraz strefy A, B, C. Strefy te zaznacza się po dwóch stronach linii centralnej CL i oddalone są od siebie co 1 s ( gdzie: s- jest odchyleniem stan-dardowym, które oblicza się, korzystając z wcześniej zebranych pomiarów).

326
Rys. 10.16. Schemat karty kontrolnej Shewharta. [19]
Przed wyznaczeniem granic kontrolnych i linii centralnej należy dla każdej podgrupy obliczyć wartość średnią oraz rozstęp. Te dane zostają wykorzystane do stworzenia punktów na KKS. Połączenie tych punktów stworzy wykresy, odpo-wiednio na karcie kontrolnej X i R (średnich i rozstępów). Tabele 10.7 i 10.8 zawierają wzory do obliczania granic kontrolnych i linii centralnych na kartach kontrolnych Shewharta przy liczbowej ocenie cech procesów produkcyjnych oraz współczynniki do obliczeń granic kontrolnych (PN-ISO 2859-1+AC1:1996).
tabela 10.7. Wzory do obliczania granic, przy liczbowej ocenie, na kartach kontrolnych Shewharta.
StatystykaBez zadanych wartości normatywnych Z zadanymi wartościami
normatywnymiLinia centralna UCL i LCL Linia centralna UCL i LCLN6)
XRs
XRs
RAX 2± or sAX 3±D3 R , D4 R
B3 s , B4 s
X0 or μR0 or d2s0s0 or c4s0
X0 ± As0D1s0, D2s0B5s0, B6s0
UWAGA – X0, R0, s0, μ i s0 są zadanymi wartościami normatywnymi

327
tabela 10.8. Współczynniki do obliczania granic kontrolnych na KKS.
obserwa-cje w pod--zbiorze
n
Współczynniki dla granic kontrolnych
A A2 A3 B3 B4 B5 B6 D1 D2 D3 D4
2345
2,1211,7321,5001,342
1,8801,0230,7290,577
2,6591,9541,6281,427
0,0000,0000,0000,000
3,2672,5682,2662,089
0,0000,0000,0000,000
2,6062,2762,0881,964
0,0000,0000,0000,000
3,6864,3584,6984,918
0,0000,0000,0000,000
3,2672,5742,2822,114
Wybór metody statystycznego kontrolowania procesu produkcyjnego, poza wyborem kart kontrolnych oraz określeniem granic kontrolnych, wymaga doboru liczebności i częstotliwości pobierania próbek, a także liczebności podgrup. Należy pamiętać, że wyroby dla tych pomiarów powinny być wyprodukowane w możliwie najlepszych warunkach, aby rozbieżności między próbkami były moż-liwie małe.
Częstość podgrupy powinna być ustalona w odpowiednio krótkich odstępach czasowych, aby zapewnić zawarcie w niej różnic występujących na np. poszczegól-nych zmianach roboczych. Natomiast liczebność wszystkich podgrup, dla dokład-niejszej analizy procesu, powinna wynosić 25 oraz zawierać co najmniej 100 poje-dynczych odczytów wartości badanej cechy procesu.
Granice oraz linie kontrolne należy wyznaczyć po przeprowadzeniu pierw-szych pomiarów zasadniczych. Jeżeli zostaną obliczone granice kontrolne oraz wartości średnie i zostaną zamieszczone na KKS, dokonujemy analizy przebiegu zmienności. Można stwierdzić, że proces produkcyjny jest w stanie statystycznie nieuregulowanym, jeżeli zachodzą następujące zdarzenia na wykresie karty kon-trolnej (rys. 10.17):
– jeden lub więcej punktów wypada poza granice kontrolne,– dwa z trzech kolejnych punktów wypadają po tej samej stronie w strefie A,– cztery z pięciu kolejnych punktów znajdują się w strefie B lub na zewnątrz
od niej,– dziewięć kolejnych punktów znajduje się po tej samej stronie średniej,– zachodzi trend sześciu kolejnych punktów o wartości malejącej lub rosną-
cej,– czternaście kolejnych punktów jest na przemian rosnących i malejących,– piętnaście kolejnych punktów znajduje się w strefie C, poniżej i powyżej
średniej procesu.

328
Rys. 10.17. Testy oddziaływań sporadycznych [18].
Jeżeli po wykreśleniu granic kontrolnych na wykresach znajdziemy punkt znajdujący się poza granicami kontrolnymi, oznacza to, że wystąpiła w tym miej-scu przyczyna szczególna. Dla każdej oznaki występowania przyczyny szczególnej konieczne jest przeprowadzenie analizy występowania danej przyczyny oraz sko-rygowanie w celu zapobiegnięcia powtórnego wystąpieniu tego stanu. Po ziden-tyfikowaniu przyczyny szczególnej i usunięciu jej odrzuca się wszystkie pod-grupy, gdzie miała wpływ dana przyczyna szczególna i dokonuje się ponownego przeliczenia granic kontrolnych oraz linii centralnych. Następnie wykreśla się po raz kolejny nowe granice i linie centralne. Jeżeli po kolejnej analizie wykresów ponownie wystąpią punkty poza granicami kontrolnymi, całą procedurę należy wykonać ponownie.
Po zakończeniu wyznaczania wszystkich granic kontrolnych i analizie wyni-ków można ocenić skuteczność zastosowania statystycznej kontroli procesu pro-dukcyjnego. Oceny takiej dokonuje się poprzez wprowadzenie wskaźników zdol-ności procesu [2, 19]:
Cp=(UCL-LCL)/6S
Cpk=min{(X-LCL)/3S ; (UCL-X)/3S}
Wskaźnik Cp określa rozproszenie procesu produkcyjnego, które mierzone jest odchyleniem standardowym lub rozstępem. Jeżeli wskaźnik Cp≥1,33 oznacza to, że 99,73% wyników pomiarów procesu produkcyjnego mieści się w polu tole-rancji. Wskaźnik Cpk określa położenie wartości średniej w wyspecyfikowanym przedziale tolerancji. Wybiera się dla tego wskaźnika wartość minimalną. Jeżeli Cpk≥1 oznacza, że przedział rozkładu ±3S normalnego znajduje się w polu tole-rancji. Wskaźniki zdolności procesu należy jednak obliczać po całej serii pomia-rów, ponieważ wówczas wskaźniki te pozwalają prawidłowo przedstawić zdolność procesu. Pojedyncza seria pomiarów może okazać się niewystarczająca, a uzy-skane wówczas wyniki będą mało wiarygodne.
UCL
LC
DLT
A
B
C
C
B
A
1
1
2
2
3
3
4
4
5
5
6
6
7
7

329
W statystycznej kontroli i doskonaleniu procesu można wyróżnić trzy główne fazy (rzutuje to również na etapowe tworzenie kart kontrolnych) [7]:1. ZBIERANIE DANYCH:
– rejestracja danych i wykreślenie na karcie.2. KONTROLA / STEROWANIE:
– obliczenie próbnych granic kontrolnych na podstawie zebranych danych,– zidentyfikowanie przyczyn szczególnych zmienności,– podjęcie działań w celu ich wyeliminowania.
3. ANALIZA I DOSKONALENIE CYKLU:– określenie liczbowo zmienności, będącej wynikiem działania przyczyn
zwykłych,– podjęcie działań w celu ich zmniejszenia.
ZBIERANIE DANYCH. Dane dotyczące cechy charakterystycznej, które mają być poddane badaniu, należy zbierać i przekształcać do postaci, która może być wykreślona na karcie kontrolnej (rys. 10.18). Dane te mogą być pomierzonymi wartościami wymiaru obrobionego detalu, ilością wad w wyrobie, czas wykony-wania danej operacji itp.
Rys. 10.18. Przygotowana tabela do zbierania danych.
KONTROLA / STEROWANIE. Próbne linie kontrolne (rys. 10.19) oblicza się na podstawie zebranych danych. Są one wykreślane na karcie jako wskazówka do analizy. Linie kontrolne nie są wartościami dopuszczalnymi czy docelowymi, ale oparte są na naturalnej zmienności procesu i planie badania wyrywkowego.
Rys. 10.19. Karta kontrolna ze wstępnymi wynikami i wykreślonymi granicami.

330
Zebrane dane są porównywane z liniami kontrolnym; aby zobaczyć, czy zmienność jest stabilna i wydaje się pochodzić tylko od istnienia przyczyn zwy-kłych. Jeżeli widoczne są przyczyny szczególne zmienności, to proces bada się, aby dalej określić, co na niego oddziaływuje. Po podjęciu przeciwdziałań (zazwy-czaj lokalnych) zbierane są dalsze dane, ponownie obliczane są granice kontrolne i podejmowane są działania do dodatkowych przyczyn szczególnych.
ANALIZA I DOSKONALENIEPo odniesieniu się do wszystkich przyczyn szczególnych i gdy proces pracuje
pod kontrolą statystyczną, kontynuuje się stosowanie karty kontrolnej jako narzę-dzia monitorującego. Obliczona też może być zdolność procesu. Jeżeli zmien-ność wynikająca z przyczyn zwykłych jest nadmierna, to proces jest niezdolny do wytwarzania wyrobów, które w sposób stały będą spełniać wymagania klienta.
Chcąc dobrze przygotować zadania związane ze zbieraniem, przetwarzaniem i analizą danych, należy spełnić 5 podstawowych warunków (rys.10.20).
Rys. 10.20. Warunki przygotowania do budowy kart kontrolnych.
USTALENIE ŚRODOWISKA DLA PODJĘCIA DZIAŁAŃ. Aby karta kontro-lna przyniosła oczekiwane skutki kierownictwo organizacji musi zapewnić odpo-wiednie środowisko. Musi usunąć strach (obawę), który wstrzymuje pracownika przed byciem otwartym. Kierownictwo musi również zapewnić środki, by współ-uczestniczyć i wspierać działania zmierzające do doskonalenia procesu.
ZDEFINIOWANIE PROCESU. Proces musi zostać zrozumiany pod wzglę-dem zależności od innych operacji i użytkowników oraz pod względem elemen-tów procesu (ludzi, sprzętu, materiałów, metod oraz środowiska), które oddziały-wują na niego na każdym etapie.

331
OKREŚLENIE CECH CHARAKTERYSTYCZNYCH. Analizując cechy cha-rakterystyczne, należy zwrócić uwagę również na te cechy, które mogą mieć istotny wpływ podczas doskonalenia procesu. Określając cechy charakterystyczne, można między innymi brać pod uwagę:
– potrzeby klienta, co obejmuje zarówno następne procesy, które wykorzy-stują wyrób lub usługi wykorzystujące wyrób, jak i końcowego klienta,
– obszary problemów aktualnych i potencjalnych, np. braki, naprawa, mar-notrawstwo, słaba wydajność.
ZMINIMALIZOWANIE NIEPOTRZEBNEJ ZMIENNOŚCI. Niepotrzebne przyczyny zmienności powinny być zmniejszone przed rozpoczęciem bada-nia (np. obserwacja prawidłowości przebiegu procesu, kontrolowane studium ze znanymi materiałami wejściowymi, stałych nastaw), czego celem jest uniknię-cie oczywistych problemów, które mogą i powinny być skorygowane nawet bez wykorzystywania kart kontrolnych.
10.3.1.3. Przykład budowy kart kontrolnych
Rozważmy teraz przykład dla kontroli grubości blachy w procesie walcowania z wykorzystaniem kart typu X-R1.
LICZEBNOŚĆ PODGRUPY Dla wstępnego zbadania procesu liczność podgrup może składać się z 4-5
kolejno wyprodukowanych sztuk (wyroby powinny być wyprodukowane w moż-liwie najlepszych warunkach). Liczność podgrupy należy wybierać tak, aby moż-liwości zmienności między poszczególnymi próbkami były możliwe małe. Jeżeli zmienność w obrębie podgrupy jest duża (zmienność w krótkim okresie), to każda niezwykła zmienność pomiędzy podgrupami oznaczać będzie zmiany w procesie, które należy zidentyfikować i im przeciwdziałać – przyjęcie takich danych do dal-szej analizy będzie skutkowało błędnym wykreśleniem granic kontrolnych.
CZĘSTOŚĆ PODGRUPY Podgrupy powinny być wybierane odpowiednio często w ustalonych odstę-
pach czasu, aby mogły odzwierciedlać potencjalne możliwości zmian, które mogą być wynikiem różnic pomiędzy zmianami roboczymi lub zastępstwem opera-torów. W naszym przypadku ustaliliśmy częstotliwość pobierania próbek co 2 godziny. Podczas wstępnego studium procesu podgrupy są często wybierane kolejno lub w krótkich odstępach czasu, w celu wykrycia czy proces może się prze-suwać, wykazując inną niestabilność w krótkich odstępach czasu. W przypadku
1 Przykład pochodzi z materiałów szkoleniowych „Statystyczna kontrola procesów” Bureau Veritas, 2008.

332
osiągania stabilności można zwiększać odstępy pomiędzy podgrupami (pomiędzy pobieraniem kolejnych podgrup).
ILOŚĆ PODGRUPDla dokładnej analizy procesu liczba podgrup powinna być nie mniejsza niż
25 (dla umożliwienia ukazania się głównych źródeł zmienności) oraz nie mniej niż 100 pojedynczych odczytów wartości cechy charakterystycznej. W naszym przypadku przyjęliśmy liczbę 25 podgrup (125 pojedynczych odczytów grubości blachy). Na rys. 10.21 przedstawiono fragment karty X-R na etapie wprowadzania danych.
Rys. 10.21. Karta X-R. Studium wstępne – wprowadzanie danych.
USTALENIE SKALI DLA KARTY KONTROLNEJDla karty X różnica pomiędzy najwyższymi a najniższymi wartościami na
skali powinna być dwukrotnie większa od różnicy pomiędzy największą wartością uśrednienia podgrupy (X). Dla karty R wartości powinny mieścić się od wartości dolnej równej O do wartości górnej, będącej równą dwukrotności największego rozstępu. Odstępy skali dla karty rozstępu należy ustalić na dwa razy większe niż dla karty średniej (jeżeli 1 jednostka skali na karcie średniej równa się 0,001 cala, to 1 jednostka na karcie rozstępu powinna równać się 0,002 cala). Wartości średnich i rozstępów zaznacza się na siatce w postaci punktów, następnie punkty należy połączyć liniami prostymi.
OBLICZANIE GRANIC KONTROLNYCHGranice kontrolne oblicza się po to, aby uzyskać zakres, w którym uśrednienia
i rozstępy podgrup będą się zmieniać, gdy występować będą tylko zwykłe przy-czyny zmienności. Wzory i wartości współczynników wykorzystywane do ich obliczenia przedstawiono w tab. 10.7 i 10.8, natomiast na rys. 10.22 oraz 10.23 zobrazowano sposób wykreślania granic kontrolnych.

333
Rys. 10.22. Schemat obliczania granic kontrolnych dla wartości średniej.
Rys. 10.23. Schemat obliczania granic kontrolnych dla rozstępu – Uwaga!W rozważanym przykładzie nie interesuje nas wartość dolna dla rozstępu (im jest ona mniejsza, tym lepiej, wobec czego nie ma potrzeby tworzenia dolnej granicy kontrolnej).
INTERPRETACJA KONTROLI PROCESU – STUDIUM WSTĘPNECelem analizy kart kontrolnych jest zidentyfikowanie dowodów na to, że
zmienność procesu lub średnia procesu nie funkcjonuje na stałym poziomie – czyli, że średnia i/lub zmienność nie są pod statystyczną kontrolą – i podjęcie odpowiednich działań. Błędem będzie przyjęcie wyznaczonych linii centralnych i granicznych, jeżeli w obliczeniach nie usunie się danych, które były wynikiem nadmiernej zmienności. Stąd wynika konieczność identyfikacji tych stanów, usu-nięcia danych z nimi związanych oraz ponownych obliczeń.
Na początku analizowana jest karta R. Podczas analizy wyznaczone punkty porównywane są z granicami kontrolnymi dla zidentyfikowania punktów będą-cych poza kontrolą lub wykazujących niezwykłe wzorce czy trendy. Występowa-

334
nie jednego lub więcej punktów poza dowolną z granic kontrolnych jest świadec-twem na to, że w tym punkcie proces nie jest pod kontrolą.
Ponieważ punkty poza granicami kontrolnymi występować mogą bardzo rzadko – jeśli występuje tylko zmienność wynikająca z obecności przyczyn zwy-kłych, to musimy przyjąć, że do tej ekstremalnej wartości przyczyniła się przy-czyna szczególna. Każdy punkt poza granicą kontrolną jest sygnałem dla przepro-wadzenia analizy funkcjonowania systemu pod kątem występowania przyczyny szczególnej. Należy zaznaczyć wszystkie punkty leżące poza granicami kontrol-nymi dla dalszego badania i akcji naprawczych w oparciu o to, kiedy ta przyczyna szczególna się zaczęła. W naszym przypadku występuje jeden taki punkt, który znajduje się powyżej UCL (rys. 10.24).
Punkt powyżej górnej granicy kontrolnej dla rozstępu jest na ogół znakiem, że: – granica kontrolna lub punkt wykresu zostały źle obliczone lub źle wykre-
ślone,– zmienność z detalu na detal lub rozrzut rozkładu zwiększył się (pogorsze-
nie) albo w tym jednym punkcie czasu, albo jako część pewnego trendu, – system pomiarowy ma nieodpowiednią czułość.
Przyczyną punktów leżących poniżej dolnej granicy kontrolnej dla rozstępu jest na ogół:
– granica kontrolna lub punkt z wykresu są błędne,– rozrzut rozkładu zmniejszył się (poprawa),– zmienił się system pomiarowy (włączając w to przetwarzanie danych).
Rys. 10.24. Identyfikacja i eliminacja punktu leżącego powyżej UCL dla karty R.

335
W dalszej części naszej analizy, dotyczącej studium wstępnego, należy postę-pować zgonie z rys. 10.17. Jeżeli już rozstępy są pod kontrolą statystyczną, to roz-rzut procesu (zmienność w obrębie podgrup) uważa się za stabilny. Należy wów-czas rozpocząć analizowanie średnich w celu sprawdzenia, czy lokalizacja procesu zmienia się w czasie. Tutaj też pomocny jest rys. 10.17. W naszym przykładzie można zaobserwować przebieg 8 punktów poniżej średniej procesu, co nasuwa podejrzenie przesunięcia procesu (rys. 10.25).
Rys. 10.25. Zidentyfikowany przebieg kolejnych 8 punktów leżących poniżej linii central-nej dla średniej.
ROZSZERZENIE GRANIC KONTROLNYCH DLA BIEŻĄCEJ KONTROLI Gdy początkowe (historyczne) dane są skorygowane i zawarte w obrębie prób-
nych granic kontrolnych, to po uzyskaniu kontroli statystycznej należy rozszerzyć te granice tak, aby obejmowały również przyszłe okresy. Na tym etapie może oka-zać się konieczne wyregulowanie procesu na punkt docelowy, jeżeli centrum pro-cesu nie pokrywa się z punktem docelowym. Granice te będą stosowane dla bie-żącego monitorowania procesu z operatorem i miejscowym nadzorem reagują-cym na oznaki stanu poza kontrolą (zarówno na karcie X, jak i R i podejmują-cymi szybkie działania korygujące). Planowanie ostatecznej postaci karty kontro-lnej może uwzględniać ograniczenie liczebności prób (mniejsza pracochłonność przy bieżącej kontroli. Na rys. 10.26 pokazano sposób obliczeń dla nowych granic, natomiast rys. 10.27 obrazuje przygotowaną kartę X-R do wdrożenia SPC.

336
Rys. 10.26. Sposób obliczenia nowych wartości dla karty X-R z zredukowaną ilością obserwacji w próbie do 3.
Rys. 10.27. Przygotowana karta X-R do wdrożenia w SCP.

337
Jak długo proces pozostaje zarówno pod kontrolą średnich, jak i rozstępów, to granice bieżące można rozciągać na dodatkowe okresy. Jednakże jeśli wystąpi oznaka, że zmieniła się średnia procesu lub rozstępu (w dowolnym kierunku), wówczas powinien zostać zidentyfikowany powód, i jeśli zmiana taka jest uzasad-niona, to granice kontrolne powinny być przeliczone na nowo w oparciu o aktu-alną realizację.
10.3.2. Narzędzia heurystyczne
10.3.2.1. Burza mózgów
Burza mózgów – (brainstorming lub brainstorm session) – twórcza dyskusja, niekonwencjonalny sposób zespołowego poszukiwania nowych pomysłów doty-czących metod rozwiązywania problemów. Opracowana w 1936 przez Ameryka-nina A.Osborne’a. Pierwszy raz zastosowana w 1938. Proces rozwiązywania pro-blemów tą metodą składa się z dwóch rozdzielonych czynności intelektualnych: wytwarzania pomysłów, ich oceny. Czynności te normalnie przeplatają się ze sobą na zasadzie sprzężenia zwrotnego, przy czym zachodzi tu zjawisko natych-miastowego wartościowania. W burzy mózgów występuje natomiast oddzielenie w czasie procesu tworzenia pomysłów od ich oceny i selekcji, w związku z czym burza mózgów nosi również nazwę metody odroczonego wartościowania. Zespół generujący pomysły powinien składać się z 6-15 osób (zbyt mała liczba członków nie spowoduje zjawiska synergii, zbyt duża sprawi trudność w prowadzeniu twór-czej rozmowy). W składzie powinni się znaleźć specjaliści z danej dziedziny, spe-cjaliści z dziedzin pokrewnych oraz osoby nie związane z problemem. Szczególnie efektywne są dwie odmiany (techniki) burzy mózgów: Philips 66 oraz technika 635.
technika Philips 66 – polega ona na tym, że sześć zespołów pracuje przez 6 minut w osobnych pomieszczeniach, starając się wytworzyć maksymalną liczbę pomysłów na wcześniej określony temat. Po 6 minutach pracy zespoły spotykają się na sesji wspólnej
technika 635 polega ona na powołaniu zespołu 6-osobowego. Każda osoba dostaje czystą kartkę, siada przy stole i ma w ciągu 5 minut napisać trzy pomysły rozwiązania danego problemu. Po upływie 5 minut formularz przekazywany jest do siedzącego obok członka zespołu celem wpisania kolejnych trzech pomysłów. Procedurę powtarza się aż do pełnego obrotu formularza.
10.3.2.2. Mapa myśli
Mapa myśli – Mind Mapping (mapowanie myśli) – sposób sporządzania nota-tek podczas pracy nad rozwiązaniem problemu. Metoda została opracowana przez dwóch brytyjskich naukowców: Tony’ego i Barry’ego Buzana, którzy twierdzą,

338
że podczas sporządzania notatek w sposób tradycyjny aktywna jest jedynie lewa półkula mózgu, odpowiedzialna za myślenie logiczne, linearność, analizę, słowa i liczby. Dzięki użyciu oprócz słów i symboli także kolorów, rysunków oraz efektu trójwymiarowości uaktywnia się prawa półkula mózgu odpowiedzialna za wyobraźnię, rytm, postrzeganie przestrzenie, kolory, a obie półkule synergicznie ze sobą współpracują. Do tworzenia map myśli używa się rysunków, haseł, skoja-rzeń istotnych dla twórcy. Przykład mapy myśli stworzonej podczas analizy awarii przedstawia rysunek 10.28.
Rys. 10.28. Mapa myśli – graficzne odwzorowywanie procesu myślowego.
10.3.2.3. Diagram Ishikawy
Diagram Ishikawy – narządzie stosowane do prowadzenia analizy związków przyczynowo-skutkowych. Jego istotą jest graficzna prezentacja analizy wzajem-nych powiązań przyczyn, wywołujących określony problem. W przypadku decy-zji eksploatacyjnych metoda ta nosi czasami nazwę 5M, gdyż podstawowe grupy przyczyn występujących to:
MANPOWER – ludzie MATERIALS – materiałyMACHINE – maszyna
MANAGAMENT – zarządzanieMETHODS – metody
Przykład Diagramu Isikawy dla problemu wad spoin przedstawia rysunek 10.29.
awaria
Dlaczego ? skutki
krótkoterminowe
długoterminowe
Ludzie ?
Maszyny ?
Procedury ?
naprawa zasoby
ekonomiczneśrodowiskowezagrażające bhp
sprawdzenie innych maszyn
Jak prognozowaćDiagnostyka ?
Czy zapobiegać ?
częstsze przeglądy ?
Ustalenia z produkcją i planowaniem
Szkolenie dla obsługi ?
Obsługa czy mechanicy ?
Trzeba zaraportować klientowi
drgania ?temperatura ?
awaria
Dlaczego ? skutki
krótkoterminowe
długoterminowe
Ludzie ?
Maszyny ?
Procedury ?
naprawa zasoby
ekonomiczneśrodowiskowezagrażające bhp
sprawdzenie innych maszyn
Jak prognozowaćDiagnostyka ?
Czy zapobiegać ?
częstsze przeglądy ?
Ustalenia z produkcją i planowaniem
Szkolenie dla obsługi ?
Obsługa czy mechanicy ?
Trzeba zaraportować klientowi
drgania ?temperatura ?

339
Rys. 10.29. Diagram Ishikawy.
10.3.2.4. Analiza Pareto
Analiza Pareto-Lorenza – narządzie służce do nadawania ważności czynni-kom (przyczynom) wywołującym określony problem, stosowane do eliminacji negatywnych zjawisk o największej częstotliwości występowania oraz identyfika-cji zjawisk przysparzających największe koszty. W metodzie zakłada się, że nie-wielka liczba osób, przyczyn sytuacji odpowiada za większość występujących zja-wisk (tzw. zasada 80/20). Zakres stosowania dotyczy eliminacji negatywnych zja-wisk o największej częstotliwości występowania oraz identyfikacji zjawisk przy-sparzających największe koszty.
Na rysunku 10.30 przedstawiono przykład analizy wykonanej na potrzeby służb utrzymania ruchu, dotyczącej identyfikacji tej grupy obiektów technicznych, które wymagają największego nakładu czasu pracy na obsługę. Wyznaczono czasy niezbędnych obsług dla każdego obiektu technicznego, uporządkowano te obiekty w kolejności od największej pracochłonności, a następnie utworzono wykres skumulowany. Ostatni słupek na wykresie określa łączny czas obsług w roku dla wszystkich obiektów (100%). Wyznaczenie grupy obiektów, na które poświęca się 80% łącznego czasu pracy, nie przedstawia żadnego problemu.

340
Rys. 10.30. Etapy prowadzenia analizy Pareto.
0123456789
10
a b c d e f g h
oznaczenie obiektu
prac
ochł
onno
ść rb
h
0123456789
10
b e h a d c g f
oznaczenie obiektu
prac
ochł
onno
ść rb
h
0
5
10
15
20
25
30
35
40
45
b e h a d c g f
oznaczenie obiektu
prac
ochł
onno
ść rb
h 80%

341
10.3.2.5. Analiza „why-why”
Analiza “why-why” – analiza, polegająca na stawianiu kolejnych pytań doty-czących uzyskanych w poprzednim kroku odpowiedzi. Efektywne narządzie do identyfikacji przyczyn podstawowych (źródłowych). Etapy działania:1 – opis problemu,2 – pytanie „DLACZEGO ?” pojawił się problem (bezpośrednie przyczyny lub
przyczyna),3 – zaznacz na diagramie stwierdzone przyczyny,4 – dla każdej przyczyny zadaj kolejne pytanie „DLACZEGO?” i zaznaczaj na dia-
gramie odpowiedzi,5 – pytaj tak długo, aż żadna dalsza odpowiedź nie będzie mogła być już udzie-
lona,6 – przeanalizuj przyczyny – zwłaszcza te z ostatniego poziomu.
Przykład analizy pokazano na rysunku 10.31.
Rys. 10.31. Przykład analizy why – why.
10.3.4. Narzędzia matematyczne
10.3.4.1. Programowanie liniowe
Generalnie rozróżnia się dwie zasady racjonalnego gospodarowania:1. największego efektu, gdzie przy danych nakładach należy maksymalizować
stopnie realizacji celu,2. najmniejszego nakładu, gdzie przy założonym stopniu realizacji celu minima-
lizujemy koszty.
częste uszkodzenia łożysk w wirówkach
nadmierne drgania
niewyważeniewirnika
elementy wirnika są nieprawidłowo
składane po myciu
pracownicy nie wiedzą, że to jest
ważne
nie byli przeszkoleni
dlaczego ?
dlaczego ?
dlaczego ?
dlaczego ?
dlaczego ?
częste uszkodzenia łożysk w wirówkach
nadmierne drgania
niewyważeniewirnika
elementy wirnika są nieprawidłowo
składane po myciu
pracownicy nie wiedzą, że to jest
ważne
nie byli przeszkoleni
dlaczego ?
dlaczego ?
dlaczego ?
dlaczego ?
dlaczego ?

342
Nie jest zatem możliwe jednoczesne uzyskiwanie coraz większych efektów (np. współczynników gotowości, niezawodności) przy jednoczesnym obniżaniu nakładów na przeglądy maszyn, inspekcje, remonty itd.
Stojące do dyspozycji środki umożliwiające realizacje jakiegoś celu powinny być użyte w sposób gwarantujący maksymalną realizację postanowionego celu, ale zarówno cel, jak i środki dają się ująć w sposób ilościowy. Stosowanie zasad racjonalnego gospodarowania sprowadza się w praktyce do rozwiązywania tzw. zagadnień optymalizacyjnych, to znaczy optymalizacji decyzji przy określonym kryterium optymalności. Możemy mieć przy tym do czynienia z zasadą najwięk-szej efektywności, jeśli przy danym nakładzie środków uzyskuje się maksymalny stopień ustalonego celu lub zasadą najmniejszego nakładu środków, gdy ustalone zadania produkcyjne uzyskujemy przy najmniejszych nakładach środków.
Zagadnienie programowania liniowego to przypadek programowania mate-matycznego, w którym wszystkie związki zachodzące między zmiennymi mają charakter liniowy [8]. Metody programowania liniowego pozwalają na określenie optymalnej alokacji ograniczonych zasobów czynników w celu uzyskania założo-nego efektu (patrz wcześniejszy slajd). Do podstawowych problemów rozwiązy-wanych metodami programowania liniowego należą między innymi wybór opty-malnego asortymentu produkcji, problem mieszanek, zagadnienie transportowe, zagadnienie kolejek. Idea programowania liniowego zostanie wyjaśniona na przy-kładzie.
Zadanie.W przedsiębiorstwie wytwarza się dwa produkty: A i B. Zbyt na produkty jest
nieograniczony, ograniczone natomiast są czynniki produkcji: wielkość zatrudnie-nia (pracochłonność produkcji), zasoby surowca I oraz zasoby surowca II. Normy zużycia czynników produkcji i wielkości ich zasobów oraz zysk z jednostki pro-dukcji podane są w poniższej tablicy.
Nazwa wyrobu
Normy zużycia w procesie produkcji Zysk jednostkowy [PLN]Surowiec I
[m3]Surowiec II
[m3]Pracochłonność
[rbh]A 0,3 0 9,2 3B 0,6 2 4 2
Zasoby 24 40 560
Należy wyznaczyć taki asortyment produkcji, który zapewnia uzyskanie mak-symalnego zysku. Innymi słowy, chodzi o wyznaczenie optymalnego asortymentu produkcji, przyjmując za kryterium optymalności zysk.
Przyjmijmy oznaczenia:

343
• x1–liczbawyprodukowanychwyrobówA,• x2–liczbawyprodukowanychwyrobówB.
Wielkości te nazywamy zmiennymi decyzyjnymi, gdyż decyzja ma doty-czyć ustalenia takich ich wartości, które gwarantującą osiągnięcie maksymalnego zysku.
Następnym etapem jest sformułowanie w sposób matematyczny funkcji celu (Z), czyli w tym przypadku osiągnięcie maksymalnego zysku. Osiągnięty zysk:
Z = x1*3 + x2*2
Należy pamiętać, że na tym etapie nie znamy jeszcze wartości x1 ani x2 i trak-tujemy je jako parametry.
Kolejnym etapem jest sformułowanie ograniczeń, wynikających z ograniczo-nych zasobów (środków produkcji). Z norm zużycia wynika, że:
zużycie surowca I wynosi 0,3x1 + 0,6 x2 i nie może być większe niż 24m3,zużycie surowca II wynosi 0x1 + 2x2 i nie może być większe niż 240m3,zużycie roboczogodzin wynosi 9,2x1 + 4x2 i nie może być większe 520rbh.
Zadanie brzmi zatem następująco:Wyznaczyć zmienne decyzyjne x1 oraz x2 w taki sposób, aby funkcja celu:
Z= 3x1 + 2 x2
przyjęła wartość maksymalną, pod warunkiem, że zmienne decyzyjne speł-niają układ nierówności:
0,3x1 + 0,6 x2 <=24
0x1 + 2x2 <= 40
9,2x1 + 4x2 <= 520
W przypadku dwóch zmiennych decyzyjnych możliwe jest rozwiązanie pro-blemu metodą graficzną, w przypadku większej liczby zmiennych należy skorzy-stać z metody SIMPLEX. Sposób wyznaczania wartości zmiennych decyzyjnych przedstawia rysunek 10.32. Zakreskowany obszar O-C-G-F-E stanowi obszar roz-wiązań dopuszczalnych wyznaczony jako wspólna część zdefiniowanych ograni-czeń. Wszystkie kombinacje x1 oraz x2 znajdujące się w tym obszarze spełniają ograniczenia. Zadanie polega na tym, aby z obszaru rozwiązań dopuszczalnych wybrać to, które będzie rozwiązaniem (zbiorem rozwiązań) optymalnym z punktu widzenia założonych kryteriów. Rozwiązaniem tym jest punkt G jako ostatni wspólny punkt obszaru rozwiązań dopuszczalnych z linią stałego zysku.

344
Rys. 10.32. Metoda graficzna rozwiązania zadania.
10.3.4.2. Programowanie marginalne
Programowanie marginalne polega na wyznaczaniu za pomocą rachunku pochodnych takich wartości zmiennych decyzyjnych, dla których funkcja celu przyjmuje maksimum (lub minimum) [9]. Jeżeli cel działalności gospodarczej można przedstawić za pomocą funkcji jednej lub więcej zmiennych decyzyjnych, to wyznaczenie optymalnych decyzji sprowadza się do obliczenia maksimum (lub minimum) funkcji jednej lub więcej zmiennych lub do znalezienia największej (lub najmniejszej) wartości tej funkcji.
Wyznaczanie optymalnego okresu eksploatacji maszyny (urządzenia).Oznaczmy przez I nakład inwestycyjny na zakup maszyny (urządzenia), przez
a średnie roczne koszty eksploatacji, niezależne od okresu eksploatacji maszyny (urządzenia), przez b współczynnik przyrostu rocznych kosztów eksploatacji wynikający z zużycia fizycznego, a przez t okres eksploatacji maszyny (urządze-nia). Zakładamy, że przyrost kosztu związany z zużyciem fizycznym maszyny jest proporcjonalny do okresu eksploatacji i w ciągu roku jest równomierny. W związku z tym można przyjąć, że współczynnik średniego rocznego przyrostu kosztu eksploatacji równy jest 1/2b. Średnie roczne koszty eksploatacji maszyny (urządzenia) wynoszą:

345
Za optymalny okres eksploatacji maszyny (urządzenia) uważamy taki okres eksploatacji, przy którym średnie roczne nakłady związane z eksploatacją maszyny (urządzenia) są najmniejsze. Obliczmy pierwszą pochodną funkcji K (t). Mamy
Pochodna K’ = 0 dla:
Ponieważ dla wszystkich t>0, przeto funkcja średniego rocznego kosztu ma minimum dla t określonego wzorem:
Zatem optymalnym okresem eksploatacji maszyny (urządzenia) jest okres
Przy optymalnym okresie eksploatacji średni roczny koszt eksploatacji wynosi
Przykład. Zakupiono maszynę za 180 tyś. zł. Średni roczny przyrost kosztu eksploatacji wskutek zużycia fizycznego wynosi 10 tyś. zł, a średnie roczne koszty niezależne od okresu eksploatacji wynoszą 50 tyś. zł. Określić optymalny okres eksploatacji maszyny.
Rozwiązanieb=10000 zł, I=180000 zł, a = 50000 zł. Przyjmując za kryterium optymalności
średnie roczne nakłady na eksploatację maszyny, ze wcześniej podanego wzoru
bt
ItK21)( 2
' +-
=
bIt 2
=
02'' 3 >=tIK
bIt 2
=

346
otrzymujemy, że optymalny okres eksploatacji wynosi 6 lat, a średni roczny koszt eksploatacji wynosi 110 000zł.
10.3.4.3. Programowanie sieciowe
Metody programowania sieciowego to techniki planowania przedsięwzięć i ich zarządzania zapewniające sprawny przebieg ich wykonania.
Zarządzanie projektem jest to proces planowania, organizacji oraz zarządza-nia zadaniami i zasobami (ludzkimi, materiałowymi, sprzętowymi, finansowymi, informacyjnymi ) w celu osiągnięcia celu w ramach ograniczeń zasobów.
Projekt (przedsięwzięcie) – to szereg połączonych ze sobą czynności wykony-wanych w celu uzyskania określonego celu. Elementami składowymi projektu są zdarzenia i czynności.
Zdarzenie – oznacza osiągnięcie stanu zaawansowania pracy przy realizacji projektu. Jest to moment rozpoczęcia lub zakończenia jednej lub kilku czynności. Zdarzenia przedstawiamy graficznie, zwykle jako okręgi z zaznaczonym nume-rem zdarzenia oraz najwcześniejszym i najpóźniejszym możliwym momentem zaistnienia, przykładowo:
gdzie: i – numer zdarzenia, i = 1, 2, 3,.… A– najwcześniejszy możliwy moment zaistnienia zdarzenia i, B– najpóźniejszy dopuszczalny moment zaistnienia zdarzenia i.
Najwcześniejszy moment zaistnienia zdarzenia i jest to najdłuższy czas przej-ścia od zdarzenia pierwszego do zdarzenia i-tego.
Najpóźniejszy moment zaistnienia zdarzenia jest to różnica pomiędzy czasem krytycznym a najdłuższym czasem przejścia od tego zdarzenia do zdarzenia koń-cowego.
Czynność – część projektu charakteryzująca się czasem trwania i zużywaniem środków. Czynności przedstawiamy przy pomocy strzałek (wektorów) łączących zdarzenia.
Najczęściej spotykane metody programowania sieciowego to PERT (Program Evolution and Review Technique – technika oceny i kontroli programu) oraz

347
CPM (Critical Path Metod – metoda ścieżki krytycznej). Obie metody powstały niezależnie od siebie w latach 1957–1958. PERT został opracowany przez Biuro Projektów Specjalnych Marynarki Wojennej USA, we współpracy z firmą Loc-kheed w celu lepszej koordynacji działalności ponad 3 tys. poddostawców i jed-nostek współpracujących przy realizacji programu rakiety podwodnej Polaris. Metodę CPM opracowano w koncernie DuPont dla ułatwienia kontroli wielkich, złożonych projektów przemysłowych. Obydwie metody są w zasadzie podobne, lecz lepiej je wykorzystywać w nieco odmiennych sytuacjach. CPM jest odpo-wiedniejsza do powtarzalnych procesów, w których zadania mają stały czas trwa-nia i znane terminy realizacji. PERT natomiast nadaje się zwłaszcza do proce-sów niepowtarzalnych, w których można jedynie w przybliżeniu oszacować okres realizacji i terminy zakończenia zadań.
Programowanie sieciowe – metoda CPM
Metoda CPM (Critical Path Method) – metoda ścieżki krytycznej – pozwala na przeprowadzanie analiz czasów trwania czynności wchodzących w skład danego projektu.
Metodę stosujemy wówczas, gdy przedsięwzięcie należy wykonać po ustalo-nych kosztach w jak najkrótszym czasie.
Budowa sieci.1. Cały projekt zostaje podzielony na zadania, które umieszcza się w sieci
w postaci czynności (działań) i zdarzeń. Czynności oznaczają czas lub zasoby potrzebne na przejście od jednego do drugiego zdarzenia, a zdarzenia – to charakterystyczne etapy przedsięwzięcia, związane z momentem zakończenia czynności poprzedniej lub czynności poprzednich.
2. Zdarzenia i czynności umieszcza się na wykresie w sposób logiczny i uporząd-kowany. Każda czynność rozpoczyna się i kończy odpowiednim zdarzeniem; żadna czynność nie może się rozpocząć przed wystąpieniem poprzedzającego je zdarzenia (lub zdarzeń).
3. Ustalamy czasy potrzebne na każde działanie. 4. Obliczamy terminy zdarzeń oraz terminy czynności. Istnieją dwa rodzaje ter-
minów zdarzeń (najwcześniejszy możliwy termin wystąpienia zdarzenia i naj-późniejszy dopuszczalny termin wystąpienia zdarzenia):a) aby ustalić najwcześniejsze możliwe terminy wystąpienia zdarzeń, doko-
nujemy obliczeń, idąc w przód wykresu (sieci). Wychodzi się przy tym od zdarzenia początkowego, dla którego przyjmuje się najwcześniejszy moż-liwy termin jego wystąpienia równy 0. Dla każdego następnego zdarzenia najwcześniejszy możliwy termin jego wystąpienia określamy w ten spo-sób, że dla każdej czynności, dla której to zdarzenie jest zdarzeniem koń-cowym, obliczamy sumę, której składnikami są: najwcześniejszy możliwy termin wystąpienia zdarzenia rozpoczynającego tę czynność i czas trwania

348
tej czynności. Z uzyskanych sum wybieramy wartość największą. Zda-rzenie można uznać za zrealizowane wówczas, gdy zostaną zakończone wszystkie prowadzące do niego czynności. Jeżeli do zdarzenia dochodzi więcej niż jedna czynność, to najwcześniejszy możliwy moment zaist-nienia tego zdarzenia jest równy czasowi najdłuższej z tych czynności. (rys. 10.33).
Rys. 10.33. Ilustracja graficzna najwcześniejszego momentu zaistnienia zdarzenia.
b) aby ustalić najpóźniejsze dopuszczalne terminy wystąpienia zdarzeń, dokonujemy obliczeń, idąc wstecz wykresu (sieci). Wychodzi się przy tym od zdarzenia końcowego, dla którego przyjmuje się arbitralnie, że najpóź-niejszy dopuszczalny termin jego wystąpienia jest równy najwcześniej-szemu możliwemu terminowi wystąpienia tego zdarzenia. Dla każdego pozostałego zdarzenia najpóźniejszy dopuszczalny termin jego wystąpie-nia określamy w ten sposób, że dla każdej czynności, dla której to zdarze-nie jest zdarzeniem początkowym (rozpoczynającym), obliczamy różnicę, której składnikami są: najpóźniejszy dopuszczalny termin wystąpienia zdarzenia kończącego daną czynność i czas trwania tej czynności. Z uzy-skanych różnic wybieramy wartość najmniejszą.
5. Wyznaczamy ścieżkę krytyczną, czyli najdłuższą ścieżkę od rozpoczęcia do zakończenia przedsięwzięcia i – tym samym – wyznaczamy całkowity czas jego trwania. Ponieważ ścieżka krytyczna określa całkowity czas trwania przedsięwzięcia, każde skrócenie tego czasu może być osiągnięte jedynie przez skrócenie czasu trwania czynności leżących na ścieżce krytycznej. Z drugiej strony, każde niedotrzymanie zaplanowanego czasu trwania czynności leżą-cych na ścieżce krytycznej stawia pod znakiem zapytania dotrzymanie ter-minu zakończenia całego przedsięwzięcia. W projektach może występować więcej niż jedna ścieżka krytyczna. Znajomość ścieżki krytycznej (czynności i zdarzeń krytycznych) ułatwia planowanie, kierowanie i koordynację reali-zacji przedsięwzięcia, ponieważ wiadomo, przekroczenie których terminów powoduje opóźnienie wykonania całego projektu.

349
Sposób obliczania najwcześniejszych i najpóźniejszych momentów zajścia poszczególnych zdarzeń przedstawia rysunek 10.34.
Rys. 10.34. Obliczanie najwcześniejszych i najpóźniejszych momentów zajścia poszcze-gólnych zdarzeń.
10.4. Systemy informatyczne wspomagające utrzymanie maszyn i urządzeń
Racjonalna eksploatacja obiektów technicznych jest źródłem oszczędności surowców, energii i nakładów kapitałowych oraz podstawową strategią umożli-wiającą uzyskanie zysków.
Istnieje zatem potrzeba i konieczność poszukiwania nowych metod podwyż-szania efektywności eksploatacji obiektów technicznych, w tym metod zarządza-nia.
Zarządzanie eksploatacją obiektów technicznych to zbiór zadań obejmują-cych: planowanie i podejmowanie decyzji, organizowanie i kontrolowanie, skie-rowane na zasoby systemu (ludzkie, finansowe, rzeczowe i informacyjne) i wyko-rzystywanych z zamiarem osiągnięcia jego celu globalnego i celów cząstkowych w sposób efektywny.

350
10.4.1. Klasyfikacja systemów informatycznych zarządzaniaNowoczesny system eksploatacji obiektów technicznych powinien funkcjono-
wać w oparciu o środki informatyki. Systemy informatyczne wykorzystywane w zarządzaniu przedsiębiorstwem, w zależności od realizowanych funkcji i zakresu możliwości, można podzielić na [1, 15, 18]:
– systemy ewidencyjne,– systemy informowania kierownictwa,– systemy wspomagania decyzji,– systemy ekspertowe.
Podstawowym zadaniem systemów ewidencyjnych (transakcyjnych, ewiden-cyjno-informacyjnych) jest bieżąca rejestracja wszystkich faktów. Służą one do przygotowania sprawozdań dotyczących poszczególnych dziedzin funkcjonowa-nia systemu działania. Pełnią one również funkcje usługowe dla innych podsyste-mów. Przykładami takich podsystemów mogą być: ewidencja zatrudnienia, płac, środków finansowych, gospodarka środkami trwałymi, gospodarka materiałowa itp. Wadą tych systemów jest przekazywanie informacji z dużym opóźnieniem czasowym, co wydłuża proces podejmowania decyzji.
Systemy informowania kierownictwa stanowią zbiór wyspecjalizowanych programów zorientowanych problemowo, których zadaniem jest wsparcie analiz techniczno-ekonomicznych. Celem ich funkcjonowania jest usprawnienie i racjo-nalizacja procesów informacyjno-decyzyjnych, tzn. dostarczanie bez zwłoki kie-rownictwu systemu działania niezbędnego do operacyjnego i taktycznego zarzą-dzania systemem. Informacje pozyskiwane z systemów informowania kierownic-twa dotyczą np. wartości wskaźników techniczno-ekonomicznych (zysk, dochód koszty) i ich odchyleń od wartości ustalonych.
Systemy wspomagania decyzji umożliwiają decydentom szczebla najwyż-szego identyfikację problemu decyzyjnego oraz tworzenie i rozwiązywanie modeli decyzyjnych, pozwalających na wybór właściwych decyzji. Systemy te są wyko-rzystywane we wspomaganiu podejmowania decyzji strategicznych i taktycznych (długo i średniookresowych) w problematyce: planowania działalności gospodar-czej, inwestycji, zaopatrzenia, sprzedaży wyrobów i usług, gospodarki finansowej.
Ekspertowe systemy zarządzania – w systemach tych komputer pełni rolę eksperta, czyli narzędzia do rozwiązywania problemów na podstawie zgromadzo-nej wiedzy przy wykorzystaniu odpowiednich reguł poprawnego rozumowania, a w szczególności reguł wnioskowania. Istotną częścią systemu ekspertowego jest baza danych związana z dziedziną, w jakiej system jest ekspertem. Baza ta (nazy-wana bazą wiedzy) musi być aktualna i musi być ciągle uzupełniana o nowe fakty i zjawiska. Drugim podstawowym elementem systemu jest baza reguł wniosko-wania, zbudowanych na zasadach przypominających wnioskowanie u ludzi, np. na podstawie zaistniałych faktów lub zdarzeń wnioskuje się o ewentualnych ich

351
przyczynach lub skutkach, jakie mogą wywołać. Dysponując zgromadzoną wie-dzą, system może również podpowiadać ewentualne rozwiązania.
Można wyróżnić dwie charakterystyczne cechy takiego systemu komputero-wego [14]:1. komputer wyznacza rozwiązanie problemu na podstawie dostępnej wiedzy,
którą posiadamy o danym obiekcie, za pomocą modelu programu, który reali-zuje pewien proces rozumowania,
2. opis wiedzy o obiekcie nie jest podany w postaci precyzyjnych wzorów mate-matycznych, a w postaci zbioru faktów i reguł logicznych.
Efektem działania systemu ekspertowego może być [14]:– diagnoza (ocena stanu),– prognoza (skutki zaistniałych faktów),– plany (cele, do których należy dążyć),– dane sterujące (dane niezbędne do podjęcia decyzji).
10.4.2. Systemy CMMS – podstawowe informacjeSystemy informatyczne wykorzystywane w utrzymaniu ruchu maszyn nazy-
wane są systemami CMMS (ang. Computerized Maintenance Management Sys-tems), czyli skomputeryzowanymi systemami zarządzania eksploatacją. Systemy te posiadają cechy systemów ewidencyjnych oraz systemów informowania kie-rownictwa.
Do głównych zadań systemów CMMS należą:– zarządzanie danymi,– usprawnienie obiegu informacji,– wspomaganie podejmowania decyzji w sferze technicznej i ekonomicznej,– śledzenie zmian stanu technicznego,– możliwość obniżenia kosztów i podwyższenia efektywności.
Do głównych problemów związanych z wyborem i implementacją systemów CMMS należą:1. System jest zbyt obszerny lub zbyt prosty. 2. Trudność adaptacji do warunków przedsiębiorstwa.3. Mały udział służb UR w projektowaniu systemu.4. Dostawca nie zna specyfiki utrzymania ruchu.
Ta grupa problemów dotyczy systemów gotowych dostępnych na rynku. Pro-ducenci takich systemów zazwyczaj projektują je jako systemy uniwersalne oferu-jące określony zakres funkcji. Użytkownik końcowy często narzeka na brak (jego zdaniem) ważnych funkcji i zbędność innych, z których nie może zrezygnować przy zakupie. Brak funkcji przydatnych dla użytkownika wynika z nieznajomo-

352
ści specyfiki utrzymania ruchu w danym przedsiębiorstwie i małego udziału użyt-kowników końcowych w projektowaniu systemu. Rozwiązaniem tego problemu jest opracowanie własnego dopasowanego do potrzeb systemu. Rozwiązanie to jest jednak często dużo droższe i czas wdrożenia takiego systemu jest dłuższy. Ist-nieją na rynku systemy CMMS oferujące duże możliwości adaptacji (dopasowa-nia) do konkretnego użytkownika, jednak wiąże się to z dodatkowymi kosztami.
Druga grupa problemów związana jest z wdrażaniem systemów CMMS. Wynika z tego, że:1. Przedsiębiorstwo nie jest przygotowane do implementacji systemu (organiza-
cyjnie lub mentalnie).2. System nie jest przyjazny dla użytkownika.3. Czas od implementacji systemu do osiągnięcia wymaganej efektywności jest
długi.4. Systemy informatyczne szybko starzeją się moralne.
W źle zorganizowanym przedsiębiorstwie wprowadzenie najlepszego sys-temu informatycznego nie przyniesie spodziewanych efektów. Wdrożenie sys-temu informatycznego to nie wszystko, na etapie późniejszym należy systema-tycznie wprowadzać do niego nowe dane dotyczące zdarzeń i faktów, aby baza danych była aktualna. Brak organizacji w prowadzeniu dokumentacji papierowej nie zostanie rozwiązany poprzez wprowadzenie systemu informatycznego. Należy przed wdrożeniem systemu poprawić organizację pracy, a potem wdrożyć system. Nieprzygotowanie mentalne jest związane z brakiem poczucia potrzeby korzysta-nia z komputerów przez pracowników starszego pokolenia. Niechęć do korzysta-nia z komputerów może być pogłębiona jeśli system jest trudny w obsłudze i jego układ nie jest przejrzysty, a obsługa nie jest intuicyjna.
Starzenie moralne systemu ma związek z szybkim postępem w dziedzinie informatyki i rozwojem sprzętu komputerowego. Produkt, który w momencie zakupu jest produktem zaawansowanym technicznie i technologicznie po roku jest już produktem średniej klasy, a po trzech, czterech latach jest przestarzały, choć nadal funkcjonuje poprawnie i realizuje stawiane przed nim zadania. Często dochodzi do tego jeszcze brak zgodności z wersjami nowszymi, co rodzi problemy z wymianą danych i komunikacją pomiędzy systemami.
10.4.3. Podstawowe funkcje systemów CMMSDo podstawowych funkcji komputerowych systemów zarządzania eksploata-
cją zaliczamy:– zarządzanie środkami trwałymi,– zarządzanie częściami zamiennymi,– zarządzanie zakupami,– zarządzanie zleceniami roboczymi,

353
– zarządzanie obsługami zapobiegawczymi (profilaktycznymi),– śledzenie projektów i budżetów,– tworzenie raportów i zestawień.
Zarządzanie środkami trwałymi obejmuje działania związane z:– zarządzaniem bazą danych środków trwałych,– dekompozycją obiektów technicznych,– tworzeniem list powiązanych z maszynami części zamiennych,– ustaleniem miejsc powstawania kosztów.
Do wprowadzania środków trwałych na ewidencję służą specjalnie opraco-wane formatki, w których w poszczególnych zakładkach podaje się dane pod-stawowe maszyn takie, jak: rok produkcji, rodzaj i typ maszyny oraz jej lokali-zację w przedsiębiorstwie. Wprowadzany do ewidencji obiekt techniczny można dekomponować na zespoły, zespoły na podzespoły a podzespoły na części, uła-twiając lokalizację uszkodzenia na etapie jego zgłaszania przez obsługę.
Każdą z wyróżnionych części zamiennych można powiązać z daną maszyną. W przypadku części standardowych (łożyska, pasy napędowe, uszczelniacze itp.) część taka może być powiązana z wieloma maszynami, do których jest stosowana. Ułatwia to gospodarowanie zapasami części zamiennych.
Dla każdej z maszyny można również zdefiniować miejsca powstawania kosz-tów, co ułatwia prowadzenie rachunku kosztów. Przykładowe miejsca powstawa-nia kosztów to [15]:
– naprawy,– eksploatacja,– ubezpieczenia,– marketing.
Zarządzanie częściami zamiennymi w systemach CMMS obejmuje:– gromadzenie danych technicznych części zamiennych,– rejestracje wydań i przyjęć części zamiennych,– rezerwowanie części i materiałów do zaplanowanych napraw,– zarządzanie kosztami części zamiennych,– zarządzanie magazynami.
Poprawne wykonywanie tych działań przyczynia się do obniżenia kosztów magazynowych poprzez nadzór nad ilością zgromadzonych części i ich zużyciem. Zebrane w tym module dane pozwalają na dobór właściwego modelu sterowania zapasami części zamiennych.

354
Zarządzanie zakupami obejmuje:– tworzenia i składanie zamówień,– przesunięcia wewnętrzne części,– zarządzanie kontraktami z dostawcami,– śledzenie dostaw w drodze.
Składanie zamówień może odbywać się automatycznie, na podstawie ustalo-nych w systemie minimalnych ilości części w magazynie i określonej wielkości dostawy. Zamówienie takie jest generowane przez system w momencie, kiedy stan magazynowy obniży się poniżej wartości minimalnej i kierowane jest do odpo-wiedniego dostawcy z listy dostawców. Możliwe jest określenie kilku dostawców danej części z przypisaniem im kolejności (dostawca podstawowy, dostawca alter-natywny).
Zarządzanie kontraktami z dostawcami obejmuje negocjowanie cen, rabatów, terminów i warunków dostaw itp. Śledzenie dostaw w drodze pozwala kontrolo-wać, ile i jakie części zamienne są już zamówione i trwa oczekiwanie na dostawę, co pozwala uniknąć składania wielu zamówień na ten sam asortyment.
Zlecenia robocze są to dokumenty, na podstawie których wykonywane są wszelkie prace obsługowe, naprawcze i diagnostyczne. W dokumencie takim powinny znajdować się dane na temat, kto zlecił i kto wykonuje naprawę, jakiego urządzenia naprawa dotyczy, jaki jest planowany zakres robót, planowany czas wykonania naprawy.
Zarządzanie zleceniami roboczymi obejmuje:– rejestrację zgłoszeń,– przygotowanie prac,– wystawienie zlecenia roboczego,– planowanie wykonania zleceń,– śledzenie zleceń,– ewidencję roboczogodzin,– ewidencję zużytych części,– ewidencję zakupów zewnętrznych (narzędzi, materiałów, itp.).
Wystawienie zlecenia roboczego odbywa się na podstawie zgłoszenia uszko-dzenia przez obsługę. Zgłoszenie powinno zawierać: lokalizację uszkodzenia (wskazywać urządzenie, zespół lub podzespół, w którym występuje problem), objawy uszkodzenia i jego pochodzenie (uszkodzenie mechaniczne, elektryczne, automatyki). Do celów śledzenia naprawy powinno podać się również czas wystą-pienia zdarzenia oraz identyfikować zgłaszającego. W formularzu zazwyczaj znaj-duje się miejsce na podanie rzeczywistego czasu naprawy i rzeczywistych kosz-tów naprawy z podziałem na koszty robocizny, koszty części zamiennych i koszty

355
inne. W formatkach dotyczących naprawy powinno znaleźć się również miejsce na określenie przyczyny uszkodzenia, ustalonej w trakcie naprawy. Gromadzenie i analiza danych o przyczynach usuwanych uszkodzeń pozwala na ciągłe uspraw-nianie działania służb utrzymania ruchu oraz identyfikowanie i eliminowanie błę-dów popełnianych przez pracowników użytkujących maszynę.
Obsługi techniczne są to działania mające na celu podtrzymanie potencjału eksploatacyjnego maszyn. Zalicza się do nich m.in. czynności smarowania, regu-lacji, badania diagnostyczne, mycie i czyszczenia oraz przeglądy techniczne.
Systemy informatyczne, wspomagające utrzymanie maszyn, pomagają prowa-dzić te działania poprzez:
– definiowanie zakresu obsług,– definiowanie obchodów,– śledzenie pomiarów kontrolnych,– powiązanie z metodami diagnostycznymi,– powiązanie ze zleceniami roboczymi.Za pomocą systemów informatycznych można dla każdej maszyny zdefi-
niować poszczególne przeglądy z wyszczególnieniem poszczególnych czynności obsługowych i podaniem rodzaju i ilości niezbędnych materiałów eksploatacyj-nych. Podobnie można postąpić z badaniami diagnostycznymi: można zdefinio-wać, w jakich punktach kontrolnych, jakie sygnały diagnostyczne mierzyć i jakie są wartości ostrzegawcze tych sygnałów. Dla badań diagnostycznych i obsług technicznych wykonywanych dla grupy maszyn w tym samym terminie ważną sprawą jest możliwość zdefiniowania obchodów, czyli optymalnego zaplanowa-nia kolejności badanych lub obsługiwanych maszyn. W ten sposób skraca się czas przeznaczony na przemieszczanie się pracowników od jednej maszyny do drugiej, podwyższając wydajność działania służb utrzymania ruchu. Funkcja powiązania obsług profilaktycznych ze zleceniami roboczymi umożliwia wystawienie zlecenia roboczego w przypadku, gdy badania diagnostyczne wykażą konieczność prze-prowadzenia naprawy.
Zgromadzone w systemie informatycznym dane na temat maszyn, części zamiennych, przeprowadzanych napraw i obsług profilaktycznych, a także badań diagnostycznych, dają możliwość całościowego śledzenia prac utrzymania ruchu, pozwalają na kontrolowanie wyłączeń okresowych maszyn i ich przezbrojeń. Pozwala to na korelowanie działań utrzymania ruchu z produkcją tak, aby zapew-nić jak najwyższą wydajność i dostępność maszyn. Systemy CMMS umożliwiają również tworzenie raportów na temat:
– kosztów eksploatacji maszyn i urządzeń w różnych okresach,– kosztów napraw poszczególnych maszyn i grup maszyn,– zużycia materiałów i części zamiennych,

356
– ewidencji czasu pracy, przestojów, napraw, postoju.
Raporty takie umożliwiają tworzenie i śledzenie budżetów związanych z utrzymaniem ruchu maszyn, pozwalają na kontrolowanie kosztów związanych z materiałami eksploatacyjnymi i częściami zamiennymi oraz na podejmowanie decyzji związanych z obiektami technicznymi (opłacalności eksploatacji maszyn).
Opisane powyżej podstawowe funkcje systemów CMMS wspomagają służby utrzymania ruchu w zakresie:1. Wykonywania prac poprzez:
– rejestrację zdarzeń,– planowanie długoterminowe (działań korekcyjnych, diagnostycznych,
napraw średnich i głównych),– planowanie krótkoterminowe z analizą dostępności ludzi, części zamien-
nych, narzędzi,– rezerwację części narzędzi, materiałów,– przydzielanie zadań dla pracowników,– śledzenie prac w toku,– przygotowanie zleceń roboczych.
2. Sterowania zapasami poprzez:– ewidencję części i materiałów eksploatacyjnych,– zamawianie u dostawców,– rezerwację dla potrzeb planowanych napraw,– śledzenie dostaw,– znajomość stanów magazynowych;
10.4.4. Czy wprowadzanie systemu CMMS jest konieczne?Wprowadzenie systemu CMMS jest inwestycją, która nierzadko wymaga
znacznych nakładów finansowych związanych z zakupem oprogramowania, sprzętu komputerowego, tworzenia infrastruktury informatycznej oraz szkole-niami pracowników. Inwestycja taka może przynieść wymierne efekty w postaci oszczędności finansowych związanych z szeroko rozumianym utrzymaniem ruchu. Jednak w przypadku małych przedsiębiorstw eksploatujących mała liczbę maszyn wprowadzanie systemu może okazać się nieopłacalne.
Wprowadzenie systemu informatycznego wspomagającego utrzymanie maszyn jest niezbędne w przypadku gdy:
– pod opieką służb technicznych przedsiębiorstwa znajduje się znaczna liczba urządzeń,
– urządzenia te podlegają stałej obsłudze technicznej i ich obsługa jest zło-żona,

357
– urządzenia podlegają planowym działaniom (przeglądy, konserwacje, obsługi zapobiegawcze itp.) i plany działań podlegają częstym modyfika-cjom,
– w przedsiębiorstwie prowadzone są prace modernizacyjne i inwestycyjne o dużym stopniu złożoności, wymagające szczegółowego planowania i nadzoru nad ich wykonaniem,
– zarządzanie dokumentacją maszyn i urządzeń oraz procedur ich obsługi nastręcza problemy (brak łatwego dostępu do instrukcji obsługi, DTR, schematów maszyn),
– występują problemy we współpracy służb technicznych ze służbami pro-dukcyjnymi, polegające na słabym przepływie informacji, np. o dostrzeżo-nych usterkach, a powodujące niską ocenę służb technicznych,
– istnieje potrzeba wprowadzenia obiektywnych wskaźników oceny służb technicznych, jak np. czas reakcji na zgłoszenie, średni czas międzyawa-ryjny, średni czas przestoju związanego z naprawą,
– służby techniczne są zobowiązane do przeprowadzania okresowych analiz statystycznych swojej działalności,
– istnieje potrzeba obniżenia zapasów magazynowych materiałów i części zamiennych; jesteśmy zainteresowani śledzeniem stanów magazynowych, w tym także magazynków podręcznych,
– istnieje potrzeba określania rzeczywistych kosztów pracy urządzeń, np. w celu ustalenia opłacalności produkcji,
– istnieje potrzeba określenia stopnia zaangażowania pracowników służb technicznych w poszczególne prace, w tym określenia na czyją korzyść były wykonywane,
– działania służb technicznych wykonywane siłami zewnętrznymi i jest konieczność rozliczania tych prac i oceny ich opłacalności,
– działalność służb technicznych odbywa się w ramach z góry zaplanowa-nych budżetów na poszczególne rodzaje prac i trzeba na bieżąco śledzić rozplanowane i wydane środki,
– służby techniczne uczestniczą w przygotowaniu budżetów na kolejne lata, posługując się w tym celu danymi historycznymi,
– w przedsiębiorstwie funkcjonuje lub ma zostać wprowadzony system jakości, np. według normy ISO 9001 i w związku z tym jest konieczny stały i łatwy dostęp do informacji o stanie technicznym urządzeń i historii działań z nimi związanych.
10.4.5. PodsumowaniePodsumowując przedstawione rozważania na temat informatycznych syste-
mów wspomagających utrzymanie maszyn (CMMS), można stwierdzić że:

358
1. Można skomputeryzować wszystkie funkcje realizowane w działach utrzyma-nia ruchu.
2. Duże przedsiębiorstwa osiągają większe korzyści ze stosowania systemów CMMS.
3. Podnoszenie wydajności i efektywności działania systemów UR następuje stopniowo i wymaga dużych nakładów czasu.
4. Zwiększenie wydajności służb UR wynika z następujących przykładowych czynników:– zgromadzone dane są dostępne dla wszystkich zainteresowanych,– centralna baza danych eliminuje potrzebę mnożenia dokumentów dla
różnych użytkowników w przedsiębiorstwie,– oszczędza się czas i nakłady pracy w przygotowanie danych niezbędnych
do zarządzania eksploatacją.5. Zwiększenie efektywności wynika z następujących przykładowych czynni-
ków:– zgromadzone dane mogą być weryfikowane w łatwy i szybki sposób, co
pozwala na wybór do analizy właściwych danych,– zgromadzone dane pozwalają na uzyskanie informacji na temat działań
poprzedzających uszkodzenie lub poznać przyczynę podobnych uszko-dzeń w maszynach tego samego lub podobnego typu,
– analiza danych historycznych pozwala na ocenę efektu przeprowadzonych działań regulacyjnych.
6. Zmniejszenie kosztów działania służb UR wynika z następujących przykłado-wych czynników:– dostępne na bieżąco dane o stanach magazynowych i śledzenie zamówień
i dostaw pozwalają na utrzymywanie mniejszych zapasów części zamien-nych i materiałów,
– analiza danych pozwala na prognozowanie stanu maszyn i urządzeń, przez co możliwe jest „wyprzedzanie” awarii działaniami zapobiegawczymi,
– skróceniu ulegają czasy przestojów naprawczych maszyn, a tym samym wzrasta czas ich dostępności.
Literatura
1. Bubnicki Z.: Podstawy informatycznych systemów zarządzania. Politechnika Wrocławska, Wrocław 1993.
2. Dopke J.: Statystyczny obraz spełnienia wymagań przez proces produkcyjny. Problemy Jakości 10/98. Wyd. SIGMA NOT, Warszawa, 1998.

359
3. Drelichowski L., Bojar W, Żółtowski M.: Elementy zarządzania eksploatacją maszyn, Wydawnictwa Uczelniane Uniwersytetu Technologiczno-Przyrodni-czego w Bydgoszczy, 2012.
4. Drożyner P., Veith E.: Risk Based Inspection Methodology Overview, Diagno-styka nr 27, 2002.
5. Hamrol A., Mantura W.: Zarządzanie jakością. Teoria i praktyka. PWN, War-szawa-Poznań 1998.
6. Holmberg K., Adgar A., Arnaiz A., Jantunen E., Mascolo J., Mekid S.: E-main-tenance. Springer Verlag, London 2010.
7. Januszkiewicz A.: Zastosowanie metod statystycznych w sterowaniu procesem produkcyjnym. Wyd. Instytut Organizacji i Zarządzania w Przemyśle „ORG-MASZ”, Warszawa 1994.
8. Jędrzejczyk Z., Kukuła K., Skrzypek J., Walkosz A.: Badania operacyjne w przy-kładach i zadaniach, Wydawnictwo Naukowe PWN, 2011.
9. Kryński H., Zastosowanie matematyki w ekonomii, PWN, 1973.10. Kubicki A.: Metody oceny efektywności systemów jakości w przedsiębiorstwie
przemysłowym. IOiZwP ORGMASZ, Warszawa 2001 (rozprawa doktorska).11. Lachance P.: Tańsze utrzymanie ruchu i większe zyski czyli CMMS. red.
M. Andrzejczak. Utrzymanie Ruchu Zakładów Przemysłowych, nr 7-8, 2012.12. Legutko S.: Trendy rozwoju utrzymania ruchu urządzeń i maszyn, Eksploata-
cja i Niezawodność NR 2/2009.13. Maintenance – Maintenance Key Performance Indicators. Standard CEN/TC
319 Date: 2005-02 TC 319 WI WG6.50 CEN/TC 319 UNI.14. Mulawka J.: Systemy ekspertowe. WNT, Warszawa 1996.15. Niziński S., Żółtowski B.: Informatyczne systemy zarządzania eksploatacją
obiektów technicznych. MARKAR-B.Ż., Bydgoszcz 2001.16. Niziński S.: Eksploatacja obiektów technicznych, Monograficzna seria Wydaw-
nicza Biblioteki Problemów Eksploatacji, Instytut Technologii Eksploatacji, Wojskowy Instytut Techniki Pancernej i Samochodowej w Sulejówku, 2002.
17. PN-ISO 8258-1+AC1:1996 Karty Kontrolne Shewharta.18. Pomykała J.M., Pomykała J. A.: Systemy informacyjne MIKOM, Warszawa
1999.19. Szkoda J.: Wykorzystanie kart kontrolnych Shewharta do diagnozowania sta-
nów statystycznego uregulowania procesów produkcyjnych. Diagnostyka nr 26, 2002.
20. Żółtowski B., Tylicki H.: Wybrane problemy eksploatacji maszyn, PWSZ Piła 2004.


Publikacja współfinansowana przez Unię Europejską w ramach Europejskiego Funduszu Społecznego
KAPITAŁ LUDZKI
Podstawybudowyi eksploatacjipojazdówi maszyn
Pod
stawy bu
do
wy i eksplo
atacji pojazd
ów
i maszyn
Olsztyn 2013
Jerzy Napiórkowski,Przemysław Drożyner,Paweł Mikołajczak,Arkadiusz Rychlik,Piotr Szczyglak,Krzysztof Ligier
ISBN 978-83-63041-97-7