Pengaturan Kecepatan Motor DC Menggunakan Flower ...
12
ISSN: xxxx-xxxx Vol. 1, No. 3, September 2019, Hal. 198 - 209 198 © 2019 Jurusan Teknik Elektro, Universitas Muhammadiyah Malang. All Rights Reserved. Artikel Ilmiah Teknik Elektro Pengaturan Kecepatan Motor DC Menggunakan Flower Pollination Algorithm Anggi Prastiyawan* 1 , Ermanu Azizul Hakim 2 , Diding Suhardi 3 1,2,3 Jurusan Teknik Elektro, Fakultas Teknik, Universitas Muhammadiyah Malang E-mail: [email protected] Abstract In a production process in the industry that is very complex and dynamically experiences changes in conditions that are less expected, due to the lack of the ability of the controlling system to maintain the processes or procedures that exist in the industry. Then this study aims to improve the performance of PID control based on the FPA (Flower Pollination Algorithm) algorithm by adding torque load to the motor to get to the desired set point and when there is overshoot it will be muffled. The ability of the FPA algorithm is to speed up finding the value of PID parameters compared to driving, which is generally manual PID yellowing by finding the best position for pollination through insects. In the design procedure and PID control tuning simulation includes 2 stages, namely the first stage of system modeling, carried out by the identification process based on variable plant data. The second stage is the design of FPA in the form of m-file as PID tuning. The results of the analysis show that the PID control based on the FPA algorithm can improve the dc motor speed performance to go to the desired set point compared without the PID control. Keywords: system control, PID, motor DC, Flower Pollination Algorithm Intisari Pada suatu proses produksi di industri yang sangat kompleks dan dinamis mengalami perubahan kondisi yang kurang diharapkan, dikarenakan minimnya kemampuan sistem pengendali dalam menjaga proses atau prosedur yang ada pada industri tersebut. Kemudian penelitian ini bertujuan untuk meningkatkan peforma kontrol PID berbasis algoritma FPA (Flower Pollination Algorithm) dengan menambahkan beban torsi pada motor untuk menuju ke set point yang di inginkan dan ketika terdapat overshoot akan teredam. Kemampuan algoritma FPA yaitu mempercepat menemukan nilai parameter PID dibandingkan dengan pengotrolan yang secara umum mentuning PID dengan manual dengan cara menemukan posisi yang terbaik penyerbukan lewat serangga. Dalam prosedur perancangan dan simulasi tuning kontrol PID meliputi 2 tahap yaitu tahapan pertama pemodelan sistem, dilakukan dengan proses identifikasi berdasarkan data variabel plant. Tahap kedua yaitu perancangan FPA yang berupa m-file sebagai tuning PID. Hasil dari analisa menunjukkan pengontrolan PID berbasis algoritma FPA dapat memperbaiki peforma kecepatan motor dc untuk menuju ke set point yang di inginkan di bandingkan tanpa kontrol PID. Kata kunci: Metode kontroller PID-FPA, model DC 1. Pendahuluan Sejak ditemukannya teori gaya lorentz dan induksi elektromagnetik, motor DC sudah dikenal. Bahkan sering dipergunakan karena kemudahannya dalam pengaplikasian. Mulai dari peralatan sehari-hari hingga dijumpai pada mainan anak-anak. Namun kenyataannya, kecepatan putar pada motor DC ketika tanpa control pid akan sulit untuk mencapai stady state di saat di beri beban berbeda [1]. Sebagai catatan, tidak semua metode tuning cocok digunakan untuk jenis-jenis plant tertentu. Misalnya: penggunaan metode tuning Ziegler-Nichols di Laboratorium Sistem Pengaturan Unibraw untuk pengaturan posisi motor DC justru memberikan hasil yang mengecewakan saat kontroler PID diterapkan [2] [3]. Dalam dunia industri, controler yang paling popular adalah controler PID. Sudah terbukti kurang lebih 50 tahun dapat menghasilkan performa keluaran control yang baik meski menggunakan algoritma sederhana [4]. Pada percobaan motor DC sebelumnya dilakukan dengan cara mentuning PID backward regtangular. Dengan tegangan 12v aktuator motor
Transcript of Pengaturan Kecepatan Motor DC Menggunakan Flower ...

ISSN: xxxx-xxxx Vol. 1, No. 3, September 2019, Hal. 198 - 209 198
© 2019 Jurusan Teknik Elektro, Universitas Muhammadiyah Malang.
All Rights Reserved.
Artikel Ilmiah Teknik Elektro
Pengaturan Kecepatan Motor DC Menggunakan Flower Pollination Algorithm
Anggi Prastiyawan*1, Ermanu Azizul Hakim2, Diding Suhardi3
1,2,3Jurusan Teknik Elektro, Fakultas Teknik, Universitas Muhammadiyah Malang E-mail: [email protected]
Abstract In a production process in the industry that is very complex and dynamically experiences
changes in conditions that are less expected, due to the lack of the ability of the controlling system to maintain the processes or procedures that exist in the industry. Then this study aims to improve the performance of PID control based on the FPA (Flower Pollination Algorithm) algorithm by adding torque load to the motor to get to the desired set point and when there is overshoot it will be muffled. The ability of the FPA algorithm is to speed up finding the value of PID parameters compared to driving, which is generally manual PID yellowing by finding the best position for pollination through insects. In the design procedure and PID control tuning simulation includes 2 stages, namely the first stage of system modeling, carried out by the identification process based on variable plant data. The second stage is the design of FPA in the form of m-file as PID tuning. The results of the analysis show that the PID control based on the FPA algorithm can improve the dc motor speed performance to go to the desired set point compared without the PID control.
Keywords: system control, PID, motor DC, Flower Pollination Algorithm
Intisari Pada suatu proses produksi di industri yang sangat kompleks dan dinamis mengalami
perubahan kondisi yang kurang diharapkan, dikarenakan minimnya kemampuan sistem pengendali dalam menjaga proses atau prosedur yang ada pada industri tersebut. Kemudian penelitian ini bertujuan untuk meningkatkan peforma kontrol PID berbasis algoritma FPA (Flower Pollination Algorithm) dengan menambahkan beban torsi pada motor untuk menuju ke set point yang di inginkan dan ketika terdapat overshoot akan teredam. Kemampuan algoritma FPA yaitu mempercepat menemukan nilai parameter PID dibandingkan dengan pengotrolan yang secara umum mentuning PID dengan manual dengan cara menemukan posisi yang terbaik penyerbukan lewat serangga. Dalam prosedur perancangan dan simulasi tuning kontrol PID meliputi 2 tahap yaitu tahapan pertama pemodelan sistem, dilakukan dengan proses identifikasi berdasarkan data variabel plant. Tahap kedua yaitu perancangan FPA yang berupa m-file sebagai tuning PID. Hasil dari analisa menunjukkan pengontrolan PID berbasis algoritma FPA dapat memperbaiki peforma kecepatan motor dc untuk menuju ke set point yang di inginkan di bandingkan tanpa kontrol PID.
Kata kunci: Metode kontroller PID-FPA, model DC
1. Pendahuluan Sejak ditemukannya teori gaya lorentz dan induksi elektromagnetik, motor DC sudah dikenal. Bahkan
sering dipergunakan karena kemudahannya dalam pengaplikasian. Mulai dari peralatan sehari-hari hingga dijumpai pada mainan anak-anak. Namun kenyataannya, kecepatan putar pada motor DC ketika tanpa control pid akan sulit untuk mencapai stady state di saat di beri beban berbeda [1].
Sebagai catatan, tidak semua metode tuning cocok digunakan untuk jenis-jenis plant tertentu. Misalnya: penggunaan metode tuning Ziegler-Nichols di Laboratorium Sistem Pengaturan Unibraw untuk pengaturan posisi motor DC justru memberikan hasil yang mengecewakan saat kontroler PID diterapkan [2] [3]. Dalam dunia industri, controler yang paling popular adalah controler PID. Sudah terbukti kurang lebih 50 tahun dapat menghasilkan performa keluaran control yang baik meski menggunakan algoritma sederhana [4]. Pada percobaan motor DC sebelumnya dilakukan dengan cara mentuning PID backward regtangular. Dengan tegangan 12v aktuator motor
ISSN: xxxx-xxxx A I T E L 199 Vol. 1, No. 3, Hal: 198 – 209
Anggi Prastiyawan, Ermanu A.H., Diding Suhardi (Pengaturan Kecepatan Motor DC …)
.
DC yang terhubung arduino dan perangkat lunak. Dalam pengujian tersebut, diperoleh hasil pengujian sinyal keakurasian (Best Fits) PBRS 93.46% [5].
Setelah itu, muncullah metode Flower Pollination Algorithm (FPA) yang di ambil dari riset penyerbukan bunga menurut wilayah cangkupan dan tingkat kecocokan untuk menghasilkan sistem keturunan yang bagus [6]. Flower Pollination Algorithm merupakan algoritma yang ditemukan oleh Xin She Yang pada tahun 2012, namun aplikasi algoritma ini masih sedikit digunakan dalam masalah optimasi [7].
Dan pada tugas akhir ini di rancang untuk mengatur kecepatan motor DC dengan Flower Pollination Algorithm PID controller dengan memberikan gangguan beban yang bervariasi atau berubah-ubah dan membandingkan hasil terbaik dari PID kontroler dengan Flower Pollination Algorithm PID yang sama-sama diberikan gangguan beban [8], [9], [10].
2. Tinjauan Pustaka
Aplikasi dalam bidang teknik dan industri sering kali melibatkan masalah optimasi dengan kendala-kendala yang kompleks. Masalah tersebut bersifat nonlinier, sehingga masalah ini sulit untuk dapat diselesaikan. Metode-metode klasik seringkali tidak dapat bekerja dengan baik untuk menyelesaikan masalah-masalah yang nonlinier dan multimodal seperti ini. Salah satu penyebabnya adalah karena di dalam metode klasik seperti metode Newton dibutuhkan informasi gradien dan di dalam metode lainnya, dibutuhkan Hessian, padahal tidak semua fungsi memiliki gradien di daerah definisinya. Penyebab lainnya adalah kekonvergenan metode klasik tersebut biasanya bergantung pada nilai titik tebakan awal, sehingga dalam proses iterasinya, ada peluang terjadinya proses pencarian terjebak di nilai optimum lokal. Flower Pollination Algorithm merupakan algoritma metheuristic yang dapat menggantikan metode tersebut. Beberapa fenomena penyerbukan bunga diantaranya adalah penyerbukan biotik dan silang (global) dengan gerakan Levy Flights, penyerbukan sendiri dan abiotic (local), bunga constanc, peluang reproduksi proporsional dengan kesamaan 2 bunga terlibat, dan peluang berpindah gabungan dari penyerbukan local dan global
Ada dua langkah kunci dalam algoritma ini, yaitu penyerbukan global dan local. Pada langkah penyerbukan global, serbuk sari dari bunga dibawa oleh hewan penyerbuk seperti serangga, dan serbuk sari dapat melakukan perjalanan jarak jauh karena serangga dapat terbang dan bergerak di daerah yang luas. Proses ini dapat menghasilkan solusi yang paling optimal dengan solusi aturan fenomena a, ditambah dengan fenomena c. Direpresentasikan secara matematis pada Persamaan (1):
:= + γL (λ) ( -g*) (1)
Di mana : serbuk sari i atau vektor solusi pada iterasi t, g*: solusi terbaik di iterasi yang sedang berlangsung. Dan L: kekuatan dari penyerbukan, yang pada dasarnya merupakan besar langkah. Pada Tabel 1. berikut ini diperlihatkan analogi penyerbukan bunga dengan optimasi masalah optimasi pada Persamaan (2).
(2)
Tabel 1. Analogi Penyerbukan Bunga dengan Optimasi
Berikut ini disajikan Pseudo Code dari FPA:
Objektif min atau maks (𝑥𝑥), 𝑥𝑥 = (𝑥𝑥) Inisiasi populasi n bunga (gamet serbuksari) sebagai solusi acak Temukan solusi terbaik g*1, 𝑥𝑥2, … , 𝑥𝑥𝑥𝑥 di populasi awal Definisikan switch probability 𝑝𝑝 ∈[0,1]Definisikan kriteria berhenti
200 A I T E L ISSN: xxxx-xxxx Vol. 1, No. 3, Hal: 198 – 209
Anggi Prastiyawan, Ermanu A.H., Diding Suhardi (Pengaturan Kecepatan Motor DC …)
(akurasi atau iterasi maksimum) While (t<Iterasi Maksimum) For i=1:n(seluruh n bunga dari populasi) If rand<p, Ambil vektor langkah L berdimensi d yang memenuhi distribusi Levy Penyerbukan global xit + 1 = xti+ γL (λ) (xti - g*) Else Ambil ∈ dari distribusi uniform (0,1) Lakukan penyerbukan lokal xi t + 1 = xti+ ∈ (xtj – xtk) End if Evaluasi solusi baru Jika solusi yang baru lebih baik, perbarui solusi ini ke dalam populasi End for Temukan solusi terbaik g*
End while
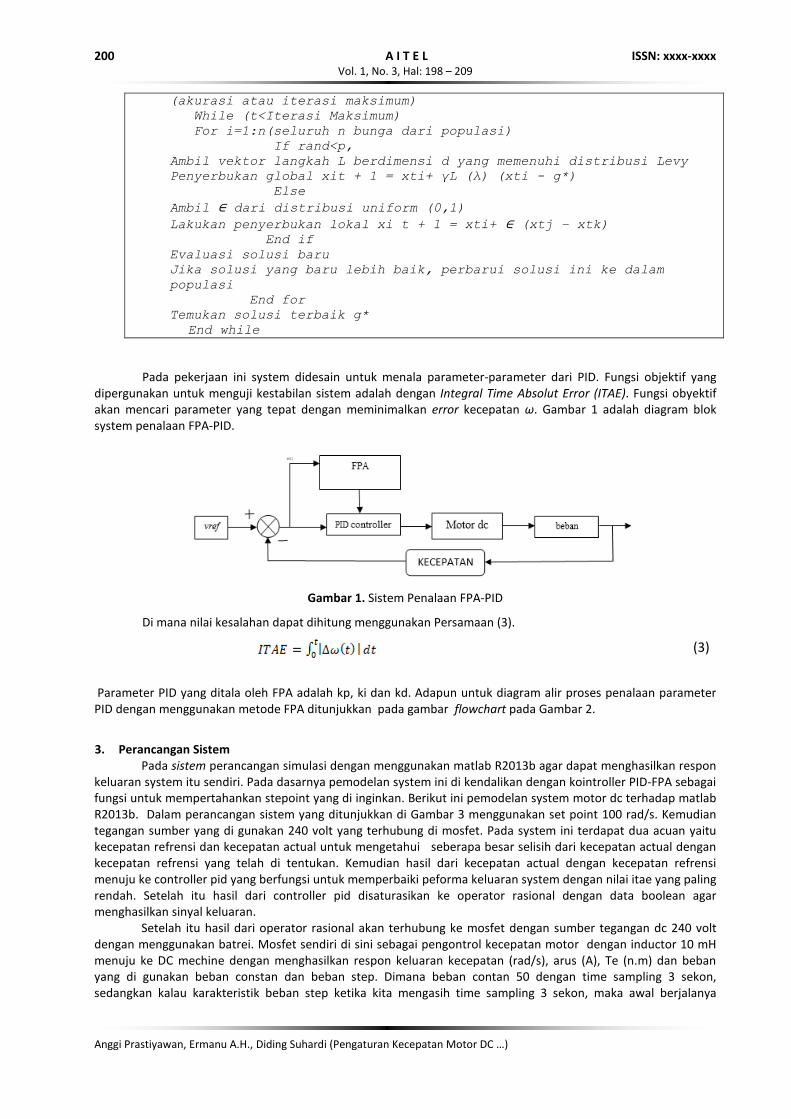
Pada pekerjaan ini system didesain untuk menala parameter-parameter dari PID. Fungsi objektif yang dipergunakan untuk menguji kestabilan sistem adalah dengan Integral Time Absolut Error (ITAE). Fungsi obyektif akan mencari parameter yang tepat dengan meminimalkan error kecepatan ω. Gambar 1 adalah diagram blok system penalaan FPA-PID.
Gambar 1. Sistem Penalaan FPA-PID
Di mana nilai kesalahan dapat dihitung menggunakan Persamaan (3).
(3)
Parameter PID yang ditala oleh FPA adalah kp, ki dan kd. Adapun untuk diagram alir proses penalaan parameter PID dengan menggunakan metode FPA ditunjukkan pada gambar flowchart pada Gambar 2.
3. Perancangan Sistem Pada sistem perancangan simulasi dengan menggunakan matlab R2013b agar dapat menghasilkan respon
keluaran system itu sendiri. Pada dasarnya pemodelan system ini di kendalikan dengan kointroller PID-FPA sebagai fungsi untuk mempertahankan stepoint yang di inginkan. Berikut ini pemodelan system motor dc terhadap matlab R2013b. Dalam perancangan sistem yang ditunjukkan di Gambar 3 menggunakan set point 100 rad/s. Kemudian tegangan sumber yang di gunakan 240 volt yang terhubung di mosfet. Pada system ini terdapat dua acuan yaitu kecepatan refrensi dan kecepatan actual untuk mengetahui seberapa besar selisih dari kecepatan actual dengan kecepatan refrensi yang telah di tentukan. Kemudian hasil dari kecepatan actual dengan kecepatan refrensi menuju ke controller pid yang berfungsi untuk memperbaiki peforma keluaran system dengan nilai itae yang paling rendah. Setelah itu hasil dari controller pid disaturasikan ke operator rasional dengan data boolean agar menghasilkan sinyal keluaran.
Setelah itu hasil dari operator rasional akan terhubung ke mosfet dengan sumber tegangan dc 240 volt dengan menggunakan batrei. Mosfet sendiri di sini sebagai pengontrol kecepatan motor dengan inductor 10 mH menuju ke DC mechine dengan menghasilkan respon keluaran kecepatan (rad/s), arus (A), Te (n.m) dan beban yang di gunakan beban constan dan beban step. Dimana beban contan 50 dengan time sampling 3 sekon, sedangkan kalau karakteristik beban step ketika kita mengasih time sampling 3 sekon, maka awal berjalanya

ISSN: xxxx-xxxx A I T E L 201 Vol. 1, No. 3, Hal: 198 – 209
Anggi Prastiyawan, Ermanu A.H., Diding Suhardi (Pengaturan Kecepatan Motor DC …)
.
system ada perubahan beban tiba-tiba dengan time sampling berbeda yaitu 0-1 sekon dengan beban 50 N.m kemudian 1-3 sekon dengan beban 100 N.m. Kemudian pemodelan kontroller pid-fpa pada Gambar 4.
Gambar 2. Flowchart FPA
Gambar 3. Pemodelan sistem dengan simulink MATLAB
202 A I T E L ISSN: xxxx-xxxx Vol. 1, No. 3, Hal: 198 – 209
Anggi Prastiyawan, Ermanu A.H., Diding Suhardi (Pengaturan Kecepatan Motor DC …)
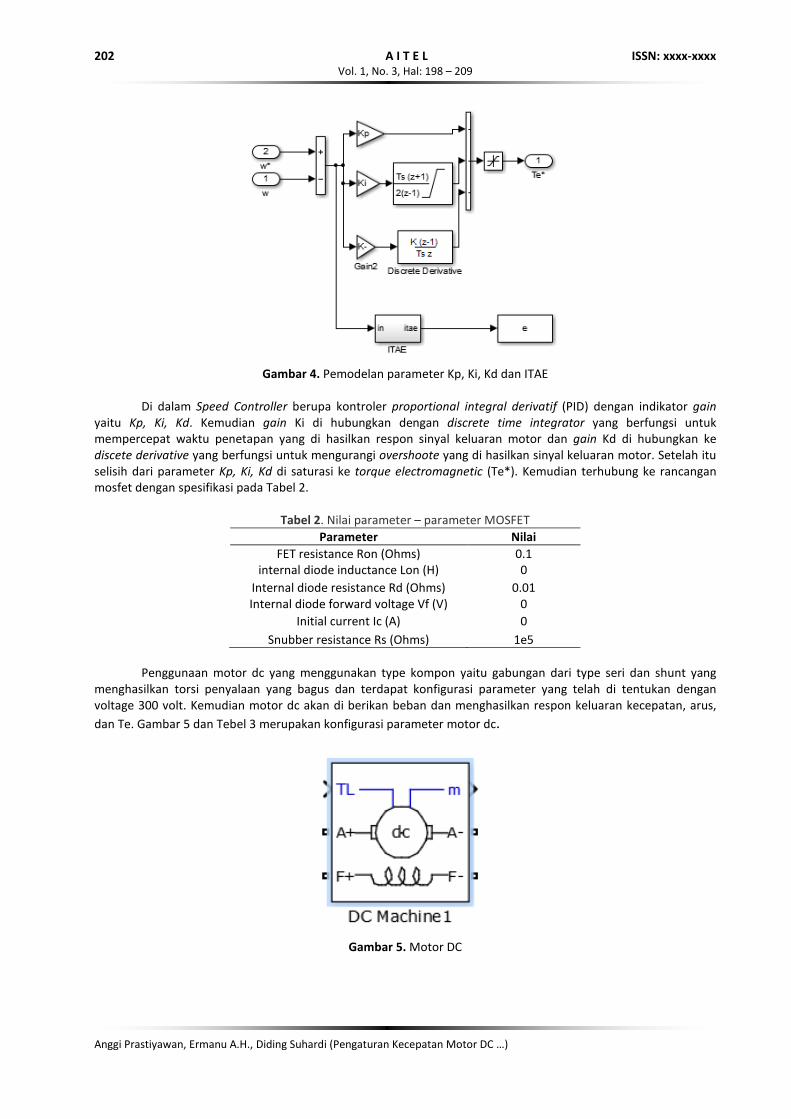
Gambar 4. Pemodelan parameter Kp, Ki, Kd dan ITAE
Di dalam Speed Controller berupa kontroler proportional integral derivatif (PID) dengan indikator gain
yaitu Kp, Ki, Kd. Kemudian gain Ki di hubungkan dengan discrete time integrator yang berfungsi untuk mempercepat waktu penetapan yang di hasilkan respon sinyal keluaran motor dan gain Kd di hubungkan ke discete derivative yang berfungsi untuk mengurangi overshoote yang di hasilkan sinyal keluaran motor. Setelah itu selisih dari parameter Kp, Ki, Kd di saturasi ke torque electromagnetic (Te*). Kemudian terhubung ke rancangan mosfet dengan spesifikasi pada Tabel 2.
Tabel 2. Nilai parameter – parameter MOSFET
Parameter Nilai FET resistance Ron (Ohms) 0.1
internal diode inductance Lon (H) 0 Internal diode resistance Rd (Ohms) 0.01 Internal diode forward voltage Vf (V) 0
Initial current Ic (A) 0 Snubber resistance Rs (Ohms) 1e5
Penggunaan motor dc yang menggunakan type kompon yaitu gabungan dari type seri dan shunt yang
menghasilkan torsi penyalaan yang bagus dan terdapat konfigurasi parameter yang telah di tentukan dengan voltage 300 volt. Kemudian motor dc akan di berikan beban dan menghasilkan respon keluaran kecepatan, arus, dan Te. Gambar 5 dan Tebel 3 merupakan konfigurasi parameter motor dc.
Gambar 5. Motor DC
ISSN: xxxx-xxxx A I T E L 203 Vol. 1, No. 3, Hal: 198 – 209
Anggi Prastiyawan, Ermanu A.H., Diding Suhardi (Pengaturan Kecepatan Motor DC …)
.
Tabel 3. Spesifikasi Motor DC Rated Value Power 5 HP
Voltage 300 V Motor Speed 1750 RPM
Rated Parameter Ra 2.581 Ohm Rf 281.3 Ohm La 0.028 H Lf 156 H Laf 0.9483 H Tf 0.5161 N.m Bm 0.002953 N.m.s
Constant J 0.02215 kg.m^2
Dalam penggunaan kontroller PID berbasis algoritma FPA, FPA merupakan system serbuk sari dari bunga dibawa oleh hewan penyerbuk seperti serangga, dan serbuk sari dapat melakukan perjalanan jarak jauh karena serangga dapat terbang dan bergerak di daerah yang luas. Proses ini bisa menghasilkan solusi yang paling optimal untuk mencari parameter Kp, Ki, Kd dengan hasil itae yang paling rendah. Berikut ini hubungan control pid dengan fpa di tunjukkan pada flowchart pada Gambar 6.
Gambar 6. Flowchart penalaan FPA untuk PID
204 A I T E L ISSN: xxxx-xxxx Vol. 1, No. 3, Hal: 198 – 209
Anggi Prastiyawan, Ermanu A.H., Diding Suhardi (Pengaturan Kecepatan Motor DC …)
4. Hasil Penelitian dan Pembahasan Dari simulasi-simulasi ini diharapkan dilihat pengaruh perubahan torsi dengan beban dan tanpa beban. Motor dc yang digunakan adalah motor dc kompon, 4 kutub, 5 HP, 240 V, 1750 rpm. Berikut ini grafik-grafik respon sistem wakhtu, hasil dari pengujian yang telah di lakukan dengan kecepatan refrensi 100 rad/s dengan waktu 1 s. 4.1 Simulasi dan Analisa Uji Respon Kontrol PID-FPA
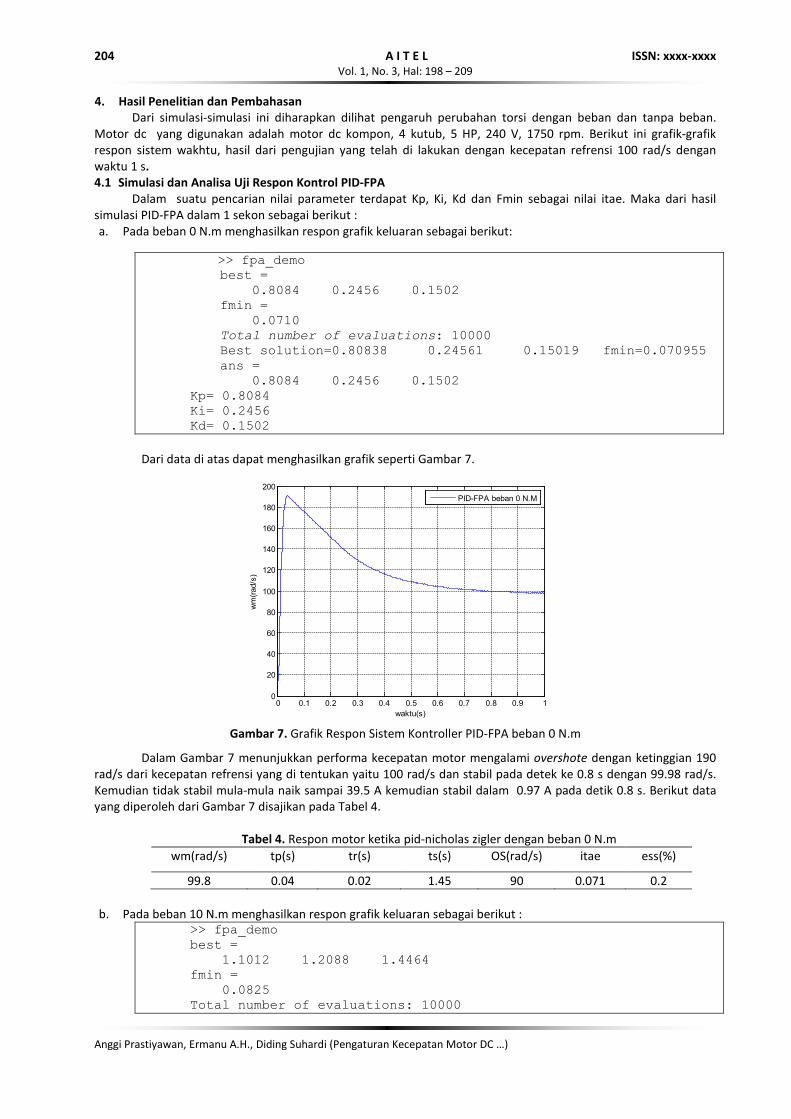
Dalam suatu pencarian nilai parameter terdapat Kp, Ki, Kd dan Fmin sebagai nilai itae. Maka dari hasil simulasi PID-FPA dalam 1 sekon sebagai berikut : a. Pada beban 0 N.m menghasilkan respon grafik keluaran sebagai berikut:
>> fpa_demo best = 0.8084 0.2456 0.1502 fmin = 0.0710 Total number of evaluations: 10000 Best solution=0.80838 0.24561 0.15019 fmin=0.070955 ans = 0.8084 0.2456 0.1502
Kp= 0.8084 Ki= 0.2456 Kd= 0.1502
Dari data di atas dapat menghasilkan grafik seperti Gambar 7.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
20
40
60
80
100
120
140
160
180
200
waktu(s)
wm
(rad/
s)
PID-FPA beban 0 N.M
Gambar 7. Grafik Respon Sistem Kontroller PID-FPA beban 0 N.m
Dalam Gambar 7 menunjukkan performa kecepatan motor mengalami overshote dengan ketinggian 190 rad/s dari kecepatan refrensi yang di tentukan yaitu 100 rad/s dan stabil pada detek ke 0.8 s dengan 99.98 rad/s. Kemudian tidak stabil mula-mula naik sampai 39.5 A kemudian stabil dalam 0.97 A pada detik 0.8 s. Berikut data yang diperoleh dari Gambar 7 disajikan pada Tabel 4.
Tabel 4. Respon motor ketika pid-nicholas zigler dengan beban 0 N.m wm(rad/s) tp(s) tr(s) ts(s) OS(rad/s) itae ess(%)
99.8 0.04 0.02 1.45 90 0.071 0.2 b. Pada beban 10 N.m menghasilkan respon grafik keluaran sebagai berikut :
>> fpa_demo best = 1.1012 1.2088 1.4464 fmin = 0.0825 Total number of evaluations: 10000

ISSN: xxxx-xxxx A I T E L 205 Vol. 1, No. 3, Hal: 198 – 209
Anggi Prastiyawan, Ermanu A.H., Diding Suhardi (Pengaturan Kecepatan Motor DC …)
.
Best solution=1.10121 1.20879 1.44642 fmin=0.08251 ans = 1.1012 1.2088 1.4464 Kp= 1.1012 Ki= 1.2088 Kd= 1.4464
Dari data di atas dapat menghasilkan grafik seperti Gambar 8.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
20
40
60
80
100
120w
m(ra
d/s)
waktu(s)
PID-FPA beban 10 N.m
Gambar 8. Grafik Respon Keluaran Kecepatan Sistem Kontroller PID-FPA beban 10 N.m
Dalam Gambar 8. menunjukkan performa kecepatan motor mengalami overshote dengan ketinggian 112 rad/s dari kecepatan refrensi yang di tentukan yaitu 100 rad/s dan stabil pada detik ke 0.05 s dengan 102.9 rad/s. Kemudian tidak stabil mula-mula naik sampai 45.5 A kemudian stabil dalam 15 A pada detik 0.05 s. Berikut data yang diperoleh dari Gambar 8 seperti pada Tabel 5.
Tabel 5. Respon motor ketika pid-nicholas zigler dengan beban 10 N.m wm(rad/s) tp(s) tr(s) ts(s) OS(rad/s) itae ess(%)
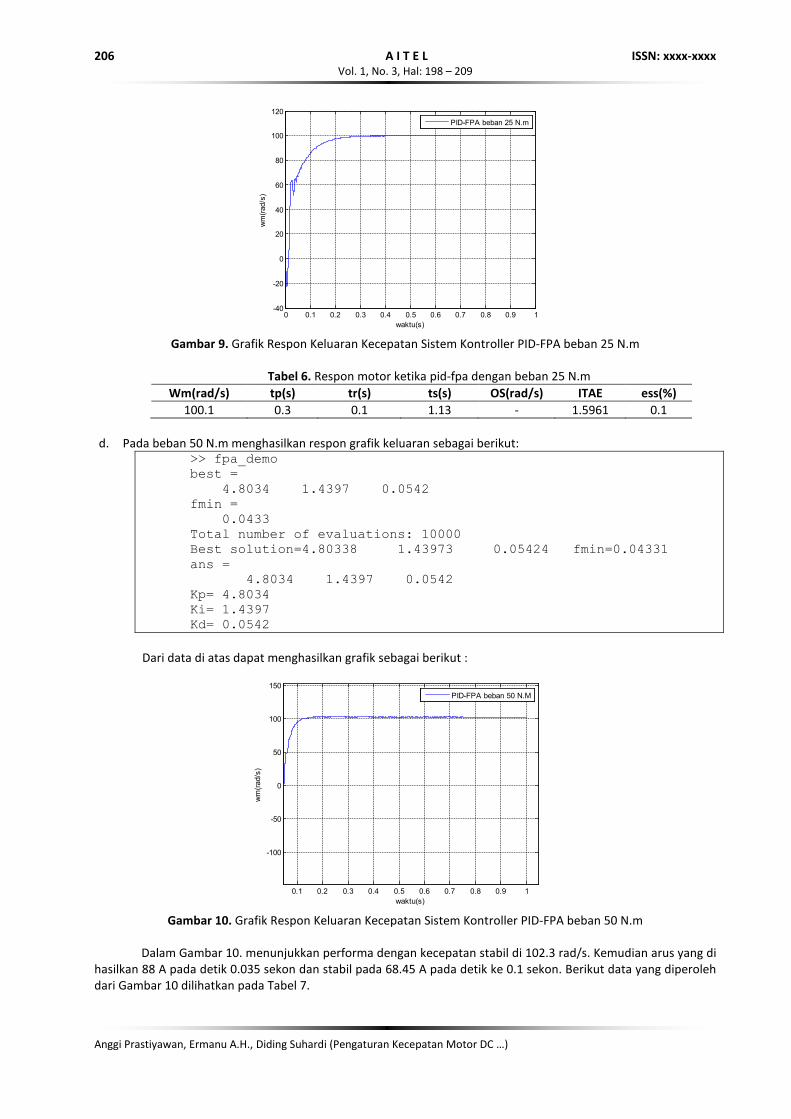
102.9 0.03 0.01 0.05 12 0.0825 2.9 c. Pada beban 25 N.m menghasilkan respon grafik keluaran sebagai berikut:
>> fpa_demo best = 3.1964 0.1036 0.1667 fmin = 0.0825 Total number of evaluations: 10000 Best solution=3.19638 0.10363 0.16671 fmin=1.59611 ans = 3.1964 0.1036 0.1667 Kp= 3.1964 Ki= 0.1036
Kd= 0.1667 Gambar 9 menunjukkan performa kecepatan motor mengalami undershote dengan ketinggian -20 rad/s
dari kecepatan refrensi yang di tentukan yaitu 100 rad/s dan stabil pada detik ke 0.3 s dengan 100.1 rad/s. Kemudian tidak stabil mula-mula naik sampai 61 A kemudian stabil dalam 35 A pada detik 0.1 s. Data yang diperoleh dari Gambar 9 ditunjukkan pada Tabel 6.
206 A I T E L ISSN: xxxx-xxxx Vol. 1, No. 3, Hal: 198 – 209
Anggi Prastiyawan, Ermanu A.H., Diding Suhardi (Pengaturan Kecepatan Motor DC …)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-40
-20
0
20
40
60
80
100
120
waktu(s)
wm
(rad/
s)
PID-FPA beban 25 N.m
Gambar 9. Grafik Respon Keluaran Kecepatan Sistem Kontroller PID-FPA beban 25 N.m
Tabel 6. Respon motor ketika pid-fpa dengan beban 25 N.m
Wm(rad/s) tp(s) tr(s) ts(s) OS(rad/s) ITAE ess(%) 100.1 0.3 0.1 1.13 - 1.5961 0.1
d. Pada beban 50 N.m menghasilkan respon grafik keluaran sebagai berikut:
>> fpa_demo best = 4.8034 1.4397 0.0542 fmin = 0.0433 Total number of evaluations: 10000 Best solution=4.80338 1.43973 0.05424 fmin=0.04331 ans = 4.8034 1.4397 0.0542 Kp= 4.8034 Ki= 1.4397
Kd= 0.0542 Dari data di atas dapat menghasilkan grafik sebagai berikut :
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-100
-50
0
50
100
150
waktu(s)
wm
(rad/
s)
PID-FPA beban 50 N.M
Gambar 10. Grafik Respon Keluaran Kecepatan Sistem Kontroller PID-FPA beban 50 N.m
Dalam Gambar 10. menunjukkan performa dengan kecepatan stabil di 102.3 rad/s. Kemudian arus yang di hasilkan 88 A pada detik 0.035 sekon dan stabil pada 68.45 A pada detik ke 0.1 sekon. Berikut data yang diperoleh dari Gambar 10 dilihatkan pada Tabel 7.
ISSN: xxxx-xxxx A I T E L 207 Vol. 1, No. 3, Hal: 198 – 209
Anggi Prastiyawan, Ermanu A.H., Diding Suhardi (Pengaturan Kecepatan Motor DC …)
.
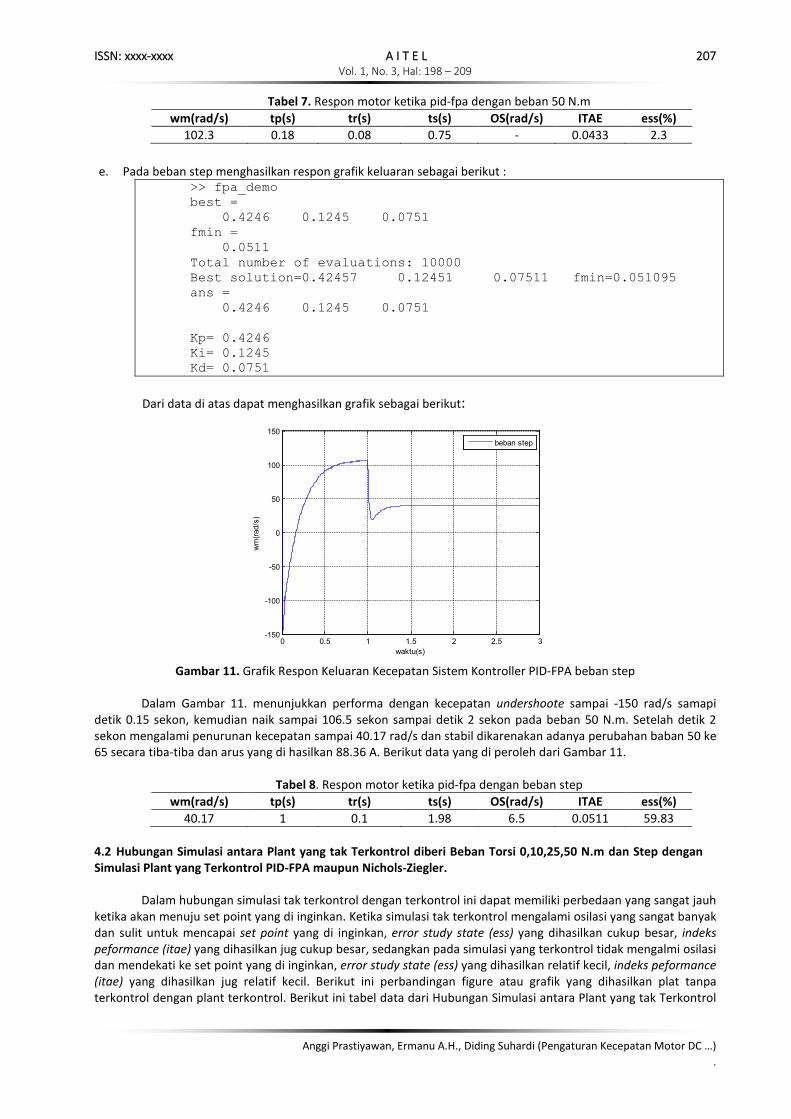
Tabel 7. Respon motor ketika pid-fpa dengan beban 50 N.m wm(rad/s) tp(s) tr(s) ts(s) OS(rad/s) ITAE ess(%)
102.3 0.18 0.08 0.75 - 0.0433 2.3
e. Pada beban step menghasilkan respon grafik keluaran sebagai berikut : >> fpa_demo best = 0.4246 0.1245 0.0751 fmin = 0.0511 Total number of evaluations: 10000 Best solution=0.42457 0.12451 0.07511 fmin=0.051095 ans = 0.4246 0.1245 0.0751 Kp= 0.4246 Ki= 0.1245
Kd= 0.0751 Dari data di atas dapat menghasilkan grafik sebagai berikut:
0 0.5 1 1.5 2 2.5 3-150
-100
-50
0
50
100
150
wm
(rad/
s)
waktu(s)
beban step
Gambar 11. Grafik Respon Keluaran Kecepatan Sistem Kontroller PID-FPA beban step
Dalam Gambar 11. menunjukkan performa dengan kecepatan undershoote sampai -150 rad/s samapi detik 0.15 sekon, kemudian naik sampai 106.5 sekon sampai detik 2 sekon pada beban 50 N.m. Setelah detik 2 sekon mengalami penurunan kecepatan sampai 40.17 rad/s dan stabil dikarenakan adanya perubahan baban 50 ke 65 secara tiba-tiba dan arus yang di hasilkan 88.36 A. Berikut data yang di peroleh dari Gambar 11.
Tabel 8. Respon motor ketika pid-fpa dengan beban step wm(rad/s) tp(s) tr(s) ts(s) OS(rad/s) ITAE ess(%)
40.17 1 0.1 1.98 6.5 0.0511 59.83 4.2 Hubungan Simulasi antara Plant yang tak Terkontrol diberi Beban Torsi 0,10,25,50 N.m dan Step dengan Simulasi Plant yang Terkontrol PID-FPA maupun Nichols-Ziegler.
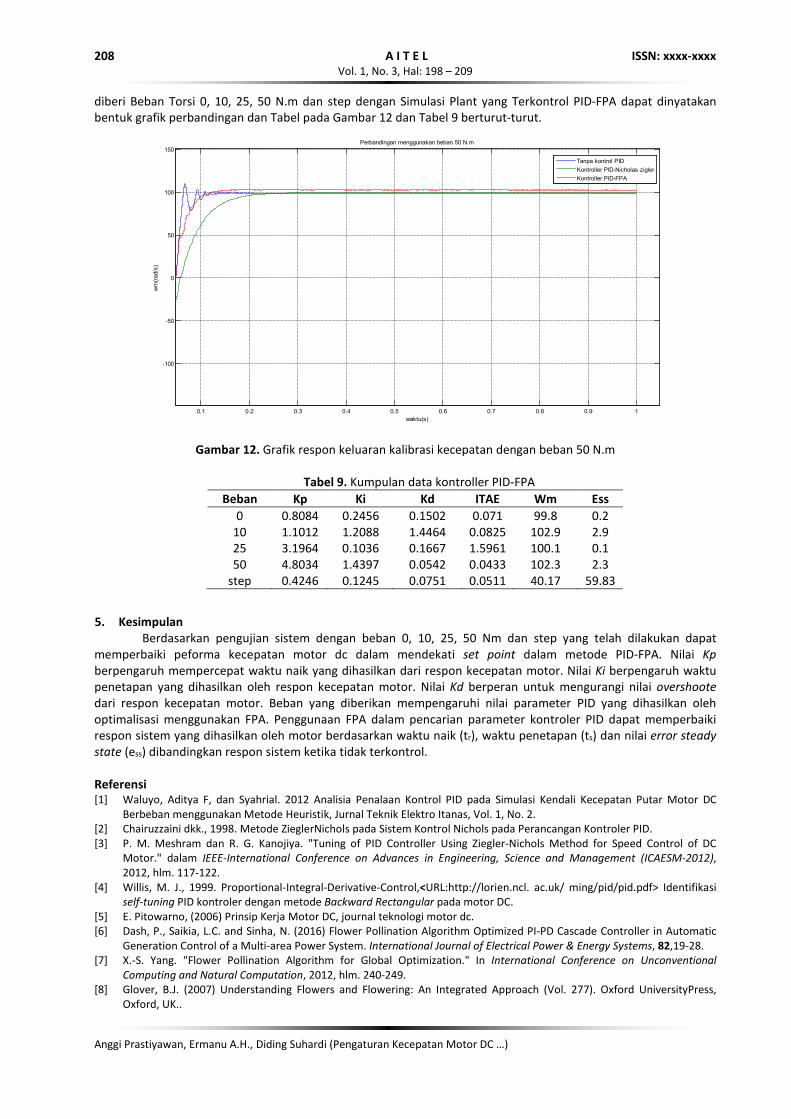
Dalam hubungan simulasi tak terkontrol dengan terkontrol ini dapat memiliki perbedaan yang sangat jauh ketika akan menuju set point yang di inginkan. Ketika simulasi tak terkontrol mengalami osilasi yang sangat banyak dan sulit untuk mencapai set point yang di inginkan, error study state (ess) yang dihasilkan cukup besar, indeks peformance (itae) yang dihasilkan jug cukup besar, sedangkan pada simulasi yang terkontrol tidak mengalmi osilasi dan mendekati ke set point yang di inginkan, error study state (ess) yang dihasilkan relatif kecil, indeks peformance (itae) yang dihasilkan jug relatif kecil. Berikut ini perbandingan figure atau grafik yang dihasilkan plat tanpa terkontrol dengan plant terkontrol. Berikut ini tabel data dari Hubungan Simulasi antara Plant yang tak Terkontrol
208 A I T E L ISSN: xxxx-xxxx Vol. 1, No. 3, Hal: 198 – 209
Anggi Prastiyawan, Ermanu A.H., Diding Suhardi (Pengaturan Kecepatan Motor DC …)
diberi Beban Torsi 0, 10, 25, 50 N.m dan step dengan Simulasi Plant yang Terkontrol PID-FPA dapat dinyatakan bentuk grafik perbandingan dan Tabel pada Gambar 12 dan Tabel 9 berturut-turut.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-100
-50
0
50
100
150
waktu(s)
wm
(rad/
s)
Perbandingan menggunakan beban 50 N.m
Tanpa kontrol PIDKontroller PID-Nicholas ziglerKontroller PID-FPA
Gambar 12. Grafik respon keluaran kalibrasi kecepatan dengan beban 50 N.m
Tabel 9. Kumpulan data kontroller PID-FPA
Beban Kp Ki Kd ITAE Wm Ess 0 0.8084 0.2456 0.1502 0.071 99.8 0.2
10 1.1012 1.2088 1.4464 0.0825 102.9 2.9 25 3.1964 0.1036 0.1667 1.5961 100.1 0.1 50 4.8034 1.4397 0.0542 0.0433 102.3 2.3
step 0.4246 0.1245 0.0751 0.0511 40.17 59.83
5. Kesimpulan Berdasarkan pengujian sistem dengan beban 0, 10, 25, 50 Nm dan step yang telah dilakukan dapat
memperbaiki peforma kecepatan motor dc dalam mendekati set point dalam metode PID-FPA. Nilai Kp berpengaruh mempercepat waktu naik yang dihasilkan dari respon kecepatan motor. Nilai Ki berpengaruh waktu penetapan yang dihasilkan oleh respon kecepatan motor. Nilai Kd berperan untuk mengurangi nilai overshoote dari respon kecepatan motor. Beban yang diberikan mempengaruhi nilai parameter PID yang dihasilkan oleh optimalisasi menggunakan FPA. Penggunaan FPA dalam pencarian parameter kontroler PID dapat memperbaiki respon sistem yang dihasilkan oleh motor berdasarkan waktu naik (tr), waktu penetapan (ts) dan nilai error steady state (ess) dibandingkan respon sistem ketika tidak terkontrol.
Referensi [1] Waluyo, Aditya F, dan Syahrial. 2012 Analisia Penalaan Kontrol PID pada Simulasi Kendali Kecepatan Putar Motor DC
Berbeban menggunakan Metode Heuristik, Jurnal Teknik Elektro Itanas, Vol. 1, No. 2. [2] Chairuzzaini dkk., 1998. Metode ZieglerNichols pada Sistem Kontrol Nichols pada Perancangan Kontroler PID. [3] P. M. Meshram dan R. G. Kanojiya. "Tuning of PID Controller Using Ziegler-Nichols Method for Speed Control of DC
Motor." dalam IEEE-International Conference on Advances in Engineering, Science and Management (ICAESM-2012), 2012, hlm. 117-122.
[4] Willis, M. J., 1999. Proportional-Integral-Derivative-Control,<URL:http://lorien.ncl. ac.uk/ ming/pid/pid.pdf> Identifikasi self-tuning PID kontroler dengan metode Backward Rectangular pada motor DC.
[5] E. Pitowarno, (2006) Prinsip Kerja Motor DC, journal teknologi motor dc. [6] Dash, P., Saikia, L.C. and Sinha, N. (2016) Flower Pollination Algorithm Optimized PI-PD Cascade Controller in Automatic
Generation Control of a Multi-area Power System. International Journal of Electrical Power & Energy Systems, 82,19-28. [7] X.-S. Yang. "Flower Pollination Algorithm for Global Optimization." In International Conference on Unconventional
Computing and Natural Computation, 2012, hlm. 240-249. [8] Glover, B.J. (2007) Understanding Flowers and Flowering: An Integrated Approach (Vol. 277). Oxford UniversityPress,
Oxford, UK..
ISSN: xxxx-xxxx A I T E L 209 Vol. 1, No. 3, Hal: 198 – 209
Anggi Prastiyawan, Ermanu A.H., Diding Suhardi (Pengaturan Kecepatan Motor DC …)
.
[9] Nurhadi. “Diktat Elektronika Daya.Fakultas Teknik, Teknik Elektro, Unversitas Muhammadiyah Malang, 2013. [10] Setiawan, Iwan, Kontrol PID untuk Proses Industri, Elexmedia Computindo, Jakarta, 2008.