NEURONOWO-ROZMYTE SYSTEMY STEROWANIA … · NEURONOWO-ROZMYTE SYSTEMY STER Tego typu założenia...
6
MODELOWANIE INŻYNIERSKIE nr 45, t. 14, rok 2012 – ISSN 1896-771X 58 NEURONOWO-ROZMYTE SYSTEMY STEROWANIA MOBILNYM ROBOTEM KOLOWYM Zenon Hendzel 1a , Magdalena Muszyńska 1b 1 Katedra Mechaniki Stosowanej i Robotyki, Politechnika Rzeszowska e-mail: a [email protected], b [email protected] Streszczenie Celem niniejszej pracy bylo zbadanie możliwości zastosowania algorytmów neuronowo-rozmytych w sterowaniu w czasie rzeczywistym ruchem nadążnym mobilnego robota kolowego w obecności zmiennych warunków pracy oraz ich ocena dotycząca jakości sterowania. NEURAL-FUZZY CONTROL SYSTEMS MOBILE ROBOT Summary The aim of this study was to investigate the possibility of using neuro-fuzzy algorithms for control traffic in real- time mobile robot in the presence of variable working conditions and their assessment of the quality control. 1. WSTĘP W niniejszej pracy do rozwiązania problemu sterowania ruchem mobilnego robota kolowego zostal opracowany inteligentny sterownik ruchu nadążnego bazujący na sieciach neuronowych i ukladach z logiką rozmytą zadaniem którego jest kompensacja nieliniowości i niedokladności modelowania mobilnego robota kolowe- go. Powstaly uklad hybrydowy nazywany jest ukladem neuronowo-rozmytym. Lączy on zarówno zalety sieci neuronowych i ukladów z logiką rozmytą. Uklad ten zostal zaprojektowany w taki sposób, aby na bieżąco modyfikować swoje wlaściwości przy zmieniających się warunkach pracy mobilnego robota. Obiektem sterowa- nia jest 2-kolowy mobilny robot. Badania symulacyjne i weryfikacyjne zostaly przeprowadzone dla przypadku, kiedy wybrany punkt mobilnego robota przemieszcza się po trajektorii w ksztalcie pętli. Przeprowadzone badania są próbą zastosowania w mechanice nowoczesnych technologii informatycznych rozumianych jako sterowa- nie w czasie rzeczywistym, uwzględniające parametrycz- ne i nieparametryczne niedokladności modelowania nieliniowego obiektu. 2. OPIS RUCHU MOBILNEGO ROBOTA Obiektem sterowania jest mobilny robot, którego sche- mat pokazano na rysunku 1 [2,5]. Podstawowe elementy robota to rama, kola napędzające, samonastawne kolo podpierające. Kola 1 i 2 napędzane są oddzielnymi silnikami elektrycznymi, które lącznie z przekladnią tworzą zespól napędzający dane kolo, enkodery, które mierzą kąt obrotu kól. Do rozważań przyjęto opis sterowanego obiektu w postaci równania 1 i 2. Dynamiczne równania ruchu 2-kolowego mobilnego robota można przedstawić w postaci równania (1) [7]: ( ) ( ) 1 2 3 1 2 4 2 1 1 1 1 2 1 2 3 4 2 1 2 2 5 1 1 6 2 2 a a a a a 0 2a a a a a a 2a 0 a sgn M a sgn M + + - α -α α α + + - + + - α -α α α α + = α & & && & & & && & & & (1) gdzie ai to parametry wynikające z geometrii ukladu, rozkladu mas oraz oporów ruchu analizowanego ukladu.
Transcript of NEURONOWO-ROZMYTE SYSTEMY STEROWANIA … · NEURONOWO-ROZMYTE SYSTEMY STER Tego typu założenia...
MODELOWANIE INŻYNIERSKIE nr 45, t. 14, rok 2012 – ISSN 1896-771X
58
NEURONOWO-ROZMYTE
SYSTEMY STEROWANIA
MOBILNYM ROBOTEM KOŁOWYM
Zenon Hendzel1a, Magdalena Muszyńska1b
1Katedra Mechaniki Stosowanej i Robotyki, Politechnika Rzeszowska
e-mail: [email protected], [email protected]
Streszczenie Celem niniejszej pracy było zbadanie możliwości zastosowania algorytmów neuronowo-rozmytych w sterowaniu
w czasie rzeczywistym ruchem nadążnym mobilnego robota kołowego w obecności zmiennych warunków pracy
oraz ich ocena dotycząca jakości sterowania.
NEURAL-FUZZY CONTROL SYSTEMS MOBILE ROBOT Summary
The aim of this study was to investigate the possibility of using neuro-fuzzy algorithms for control traffic in real-
time mobile robot in the presence of variable working conditions and their assessment of the quality control.
1. WSTĘP
W niniejszej pracy do rozwiązania problemu sterowania
ruchem mobilnego robota kołowego został opracowany
inteligentny sterownik ruchu nadążnego bazujący na
sieciach neuronowych i układach z logiką rozmytą
zadaniem którego jest kompensacja nieliniowości
i niedokładności modelowania mobilnego robota kołowe-
go. Powstały układ hybrydowy nazywany jest układem
neuronowo-rozmytym. Łączy on zarówno zalety sieci
neuronowych i układów z logiką rozmytą. Układ ten
został zaprojektowany w taki sposób, aby na bieżąco
modyfikować swoje właściwości przy zmieniających się
warunkach pracy mobilnego robota. Obiektem sterowa-
nia jest 2-kołowy mobilny robot. Badania symulacyjne
i weryfikacyjne zostały przeprowadzone dla przypadku,
kiedy wybrany punkt mobilnego robota przemieszcza się
po trajektorii w kształcie pętli. Przeprowadzone badania
są próbą zastosowania w mechanice nowoczesnych
technologii informatycznych rozumianych jako sterowa-
nie w czasie rzeczywistym, uwzględniające parametrycz-
ne i nieparametryczne niedokładności modelowania
nieliniowego obiektu.
2. OPIS RUCHU MOBILNEGO
ROBOTA
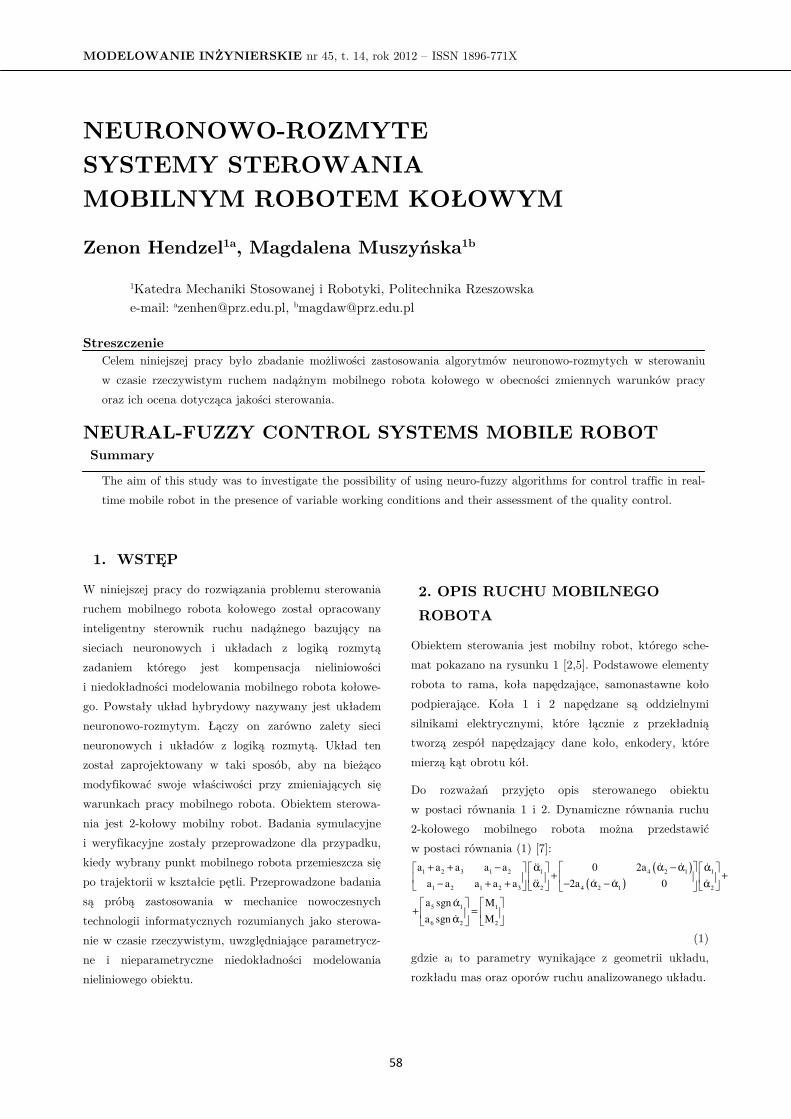
Obiektem sterowania jest mobilny robot, którego sche-
mat pokazano na rysunku 1 [2,5]. Podstawowe elementy
robota to rama, koła napędzające, samonastawne koło
podpierające. Koła 1 i 2 napędzane są oddzielnymi
silnikami elektrycznymi, które łącznie z przekładnią
tworzą zespół napędzający dane koło, enkodery, które
mierzą kąt obrotu kół.
Do rozważań przyjęto opis sterowanego obiektu
w postaci równania 1 i 2. Dynamiczne równania ruchu
2-kołowego mobilnego robota można przedstawić
w postaci równania (1) [7]:
( )
( )1 2 3 1 2 4 2 11 1
1 2 1 2 3 4 2 12 2
5 1 1
6 2 2
a a a a a 0 2a
a a a a a 2a 0
a sgn M
a sgn M
+ + − α − α α α + +
− + + − α − αα α
α + =
α
& &&& &
& &&& &
&
&
(1)
gdzie ai to parametry wynikające z geometrii układu,
rozkładu mas oraz oporów ruchu analizowanego układu.
Zenon Hendzel, Magdalena Muszyńska
Rys.1. Schemat mobilnego robota-Pioneer 2DX
Przyjęto współrzędną uogólnioną w postaci kąta obrotu
własnego kół a M1 i M2 to momenty napędzające koła,
które są sygnałami sterowań. W zapisie wektorowo
macierzowym równanie (1) można przedstawić w postaci
zależności (2):
( ) ( )M C F uα + α α + α =&& & & &
gdzie
[ ] [ ]T T T
d 1 2 d 1 2 d 1 2, , , , ,α = α α α = α α α = α α& & & && && &&
3. NEURONOWO-ROZMYTY
KOMPENSATOR NIELINIOWOŚCI
W sterowaniu ruchem nadążnym obiektów nieliniowych
a szczególnie w robotyce, przyjmuje się sygnał sterowań
o strukturze w postaci równania (3) [1,3]:
Dˆu f K s= + − ς
gdzie KDs to struktura regulatora PD,
dodatkowe sterowanie zadaniem, którego będzie ko
pensacja niedokładności, f̂ to ocena nieliniowej funkcji
sterowanego obiektu, która wynika z opisu matematyc
nego i jest przedstawiona za pomocą
Nieliniowa funkcja f(x) dana jest zależnością:
( ) ( ) ( )f x Mv C v F= + α + α& &&
gdzie d dv e v e., = α + Λ = α + Λ& && &&
Oznaczymy błąd sterowania w postaci równania (5):
Zenon Hendzel, Magdalena Muszyńska
59
Pioneer 2DX
Przyjęto współrzędną uogólnioną w postaci kąta obrotu
to momenty napędzające koła,
re są sygnałami sterowań. W zapisie wektorowo-
macierzowym równanie (1) można przedstawić w postaci
(2)
[ ]T T T
d 1 2 d 1 2 d 1 2, , , , ,α = α α α = α α α = α α& & & && && && .
ROZMYTY
KOMPENSATOR NIELINIOWOŚCI
obiektów nieliniowych,
a szczególnie w robotyce, przyjmuje się sygnał sterowań
o strukturze w postaci równania (3) [1,3]:
(3)
s to struktura regulatora PD, natomiast ς to
którego będzie kom-
to ocena nieliniowej funkcji
sterowanego obiektu, która wynika z opisu matematycz-
nego i jest przedstawiona za pomocą równania (4).
Nieliniowa funkcja f(x) dana jest zależnością:
(4)
v e v e.& && &
Oznaczymy błąd sterowania w postaci równania (5):
de = α − α
oraz uogólniony błąd nadążania w postaci zależności (6):
s e e= + Λ&
W tym rozwiązaniu wykorzystuje się własności ruchu
ślizgowego układów o zmiennej strukturze poprzez
przyjęcie uogólnionego błędu sterowania w postaci 6.
Takie ujęcie problematyki sterowania ruchem nadążnym
pozwala na zastąpienie układu niestacjonarnego ukł
dem stacjonarnym i obniża rząd analizowanego układu,
a to oznacza, że pierwotny problem możemy zapisać
w postaci równania (7) w funkcji uogólnionego błędu s:
( )Ms C s f (x) u= − α + −& &
Nieliniowość w postaci równania
mowana układem neuronowo-rozmytym. Ze względu na
eksplozję rozwiązań wynikającą
nych wejściowych funkcję tę zdekomponowano na 6
składowych funkcji podanych w postaci zależności (8)
[6]:
1 1 2 3
2 4 5 6
f (x) g g g
f (x) g g g
= + +
= + +
Każda z tych funkcji posiada dwa sygnały wejściowe
umożliwiło zastosowanie tej struktury w czasie
wistym. W niniejszej pracy do aproksymacji nielini
wych funkcji zastosowano układ neuronowo
Uczeniu w tym układzie podlegają parametry
i przesłanki bazy reguł modelu Sugeno.
j 1 j1 2 j1 jR : IF x A AND x B THEN g w , j 1, 2,..., N= = = =
Stopień spełnienia przesłanki danej reguły przyjęto
w postaci:
j Aj 1 Bj 2(x ) (x )φ = µ ⋅µ
Stosując rozmywanie typu singleton, przyjmując funkcję
przynależności w postaci funkcji Gaussa oraz stopień
spełnienia przesłanek w postaci (10) model rozmyty
zapiszemy w postaci zależności (11).N
k kj j
j 1
g w , k 1...6=
= φ =∑
W procesie adaptacji uczeniu podlegać będą szerokości
i środki funkcji Gaussa interpretowanej jako zbiór
rozmyty opisany zależnością (12):2 2
11 1 11
11
r (x c )
A 1(x ) e
− −µ =
(Uwzględniając (12) stopień spełnienia przesłanki danej
reguły (11) zapiszemy jako: 2 2 2 2
11 1 11 12 2 12r (x c ) r (x c )
1e
− − − −φ =
(5)
oraz uogólniony błąd nadążania w postaci zależności (6):
(6)
wykorzystuje się własności ruchu
układów o zmiennej strukturze poprzez
przyjęcie uogólnionego błędu sterowania w postaci 6.
Takie ujęcie problematyki sterowania ruchem nadążnym
pozwala na zastąpienie układu niestacjonarnego ukła-
dem stacjonarnym i obniża rząd analizowanego układu,
acza, że pierwotny problem możemy zapisać
w postaci równania (7) w funkcji uogólnionego błędu s:
Ms C s f (x) u (7)
Nieliniowość w postaci równania (4) zostanie aproksy-
rozmytym. Ze względu na
eksplozję rozwiązań wynikającą z dużej liczby zmien-
nych wejściowych funkcję tę zdekomponowano na 6
składowych funkcji podanych w postaci zależności (8)
(8)
Każda z tych funkcji posiada dwa sygnały wejściowe, co
umożliwiło zastosowanie tej struktury w czasie rzeczy-
wistym. W niniejszej pracy do aproksymacji nielinio-
wych funkcji zastosowano układ neuronowo-rozmyty [4].
Uczeniu w tym układzie podlegają parametry konkluzji
i przesłanki bazy reguł modelu Sugeno.
j 1 j1 2 j1 jR : IF x A AND x B THEN g w , j 1, 2,..., N= = = =
(9)
Stopień spełnienia przesłanki danej reguły przyjęto
(10)
Stosując rozmywanie typu singleton, przyjmując funkcję
przynależności w postaci funkcji Gaussa oraz stopień
spełnienia przesłanek w postaci (10) model rozmyty
zemy w postaci zależności (11).
g w , k 1...6= φ = (11)
W procesie adaptacji uczeniu podlegać będą szerokości
i środki funkcji Gaussa interpretowanej jako zbiór
rozmyty opisany zależnością (12):
(12)
Uwzględniając (12) stopień spełnienia przesłanki danej
(13)
NEURONOWO-ROZMYTE SYSTEMY STER
Tego typu założenia umożliwiają zapis nieliniowości
mobilnego robota w postaci zależności (14) interpret
wanej jako model neuronowo-rozmyty. Każdą z tych
funkcji gi można zapisać w postaci wagi z indeksem razy
stopień spełnienia przesłanki. Te wielkości będą podl
gać uczeniu w czasie rzeczywistym i można wówczas
powiedzieć, że powstanie układ neuronowo
(1)T (1) (2)T (2) (3)T (3)1
(4)T (4) (5)T (5) (6)T (6)
2
f̂ W W Wf̂
ˆ W W Wf
⋅φ + ⋅φ + ⋅φ= =
⋅φ + ⋅φ + ⋅φ
gdzie
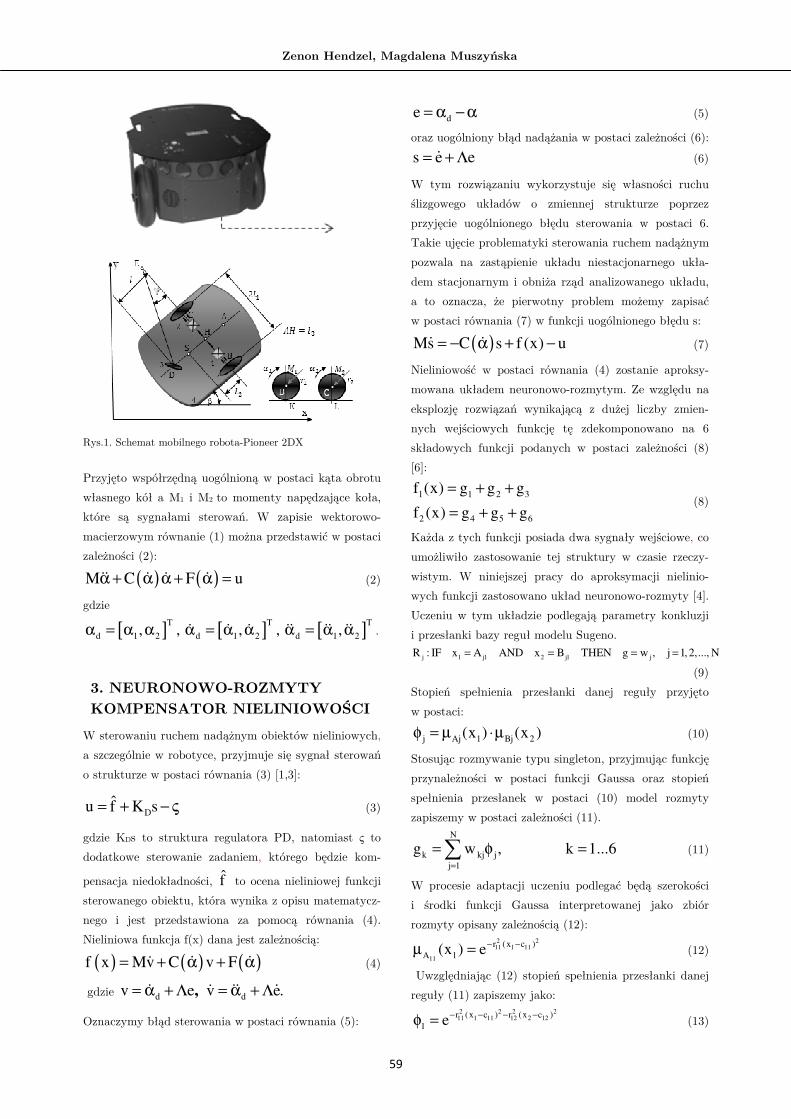
Rys.2. Schemat układu neuronowo-rozmytego
Gdzie adaptowane parametry układu neuronowo
rozmytego wyznacza się na podstawie zależności (17
wraz z sygnałem sterowania odpornego. Wszystkie te
sygnały wynikają z analizy stabilności zamkniętego
układu sterowania.
T T T T
w w ji ji wˆˆ ˆˆ ˆW F s F (A r B c )s F s W= φ − + −
&
k
ji r r jiˆˆ ˆr F AWs F s r= −&
k
ji c c jiˆˆ ˆc F BWs F s c= −&
gdzie jest sygnałem sterowania odpornego i wynosi:
T
D
sK Y
sς = −
Natomiast to macierz
(dostępnych) sygnałów.
ς
f ji jiˆ ˆ ˆY(d , W, r ,c )
ROZMYTE SYSTEMY STEROWANIA MOBILNYM ROBO
60
Tego typu założenia umożliwiają zapis nieliniowości
mobilnego robota w postaci zależności (14) interpreto-
rozmyty. Każdą z tych
można zapisać w postaci wagi z indeksem razy
stopień spełnienia przesłanki. Te wielkości będą podle-
gać uczeniu w czasie rzeczywistym i można wówczas
powiedzieć, że powstanie układ neuronowo-rozmyty.
(1)T (1) (2)T (2) (3)T (3)
(4)T (4) (5)T (5) (6)T (6)
W W W
W W W
⋅φ + ⋅φ + ⋅φ
⋅φ + ⋅φ + ⋅φ (14)
(1)T (1) (1) 1 1
11 12 19W w w w ⋅φ =
W wyniku przyjętej struktury aproksymacji nieliniow
ści robota oraz jej aproksymacji z uwzględnieniem
aspektu linearyzacji w funkcji opisującej zbiory rozmyte
opis układu zamkniętego otrzyman
[ ] T T T T T T
D nr nr ji ji nr ji ji fˆ ˆ ˆMs K C( ) s W A r B c W A r B c d = − + α + φ − − + + + + ς
%& & % %
rozmytego
Gdzie adaptowane parametry układu neuronowo-
rozmytego wyznacza się na podstawie zależności (17-19)
sygnałem sterowania odpornego. Wszystkie te
sygnały wynikają z analizy stabilności zamkniętego
T T T T
w w ji ji wˆ ˆW F s F (A r B c )s F s W= φ − + −
(17)
(18)
(19)
gdzie jest sygnałem sterowania odpornego i wynosi:
(20)
Natomiast to macierz mierzalnych
Zastosowanie przedstawionego adaptacyjnego podejścia
do wyznaczenia parametrów konkluzji i przesłanki
umożliwiło zastąpienie układu
neuronowym, co symbolicznie pokazano na rys. 2, na
którym zademonstrowano tylko realizację nieliniowości
oznaczonej we wcześniejszych rozważaniach przez f
Struktura ta wynika z układu rozmytego.
4. WYNIKI WERYFIKACJI
NEURONOWO-ROZMYTEGO
UKŁADU STEROWANIA
W niniejszej pracy zastosowano pakiet Matlab/Simulink
oraz platformę sprzętową firmy dSPACE do weryfikacji
zaproponowanych rozwiązań sterowania neuronowo
rozmytego na obiekcie rzeczywistym, którym był mobi
ny robot kołowy Pioneer 2DX.
neuronowo-rozmytego sterowania ruchem nadążnym
OWANIA MOBILNYM ROBOTEM KOŁOWYM
(1)
1
(1)
(1)T (1) (1) 1 1 2
11 12 19
(1)
9
W w w w
φ φ φ
KM
(15)
W wyniku przyjętej struktury aproksymacji nieliniowo-
ści robota oraz jej aproksymacji z uwzględnieniem
aspektu linearyzacji w funkcji opisującej zbiory rozmyte
opis układu zamkniętego otrzymano w postaci:
( )T T T T T T
D nr nr ji ji nr ji ji fˆˆ ˆMs K C( ) s W A r B c W A r B c d = − + α + φ − − + + + + ς
& & % %
(16)
Zastosowanie przedstawionego adaptacyjnego podejścia
do wyznaczenia parametrów konkluzji i przesłanki
umożliwiło zastąpienie układu rozmytego układem
neuronowym, co symbolicznie pokazano na rys. 2, na
którym zademonstrowano tylko realizację nieliniowości
oznaczonej we wcześniejszych rozważaniach przez f1.
Struktura ta wynika z układu rozmytego.
4. WYNIKI WERYFIKACJI
ROZMYTEGO
UKŁADU STEROWANIA
W niniejszej pracy zastosowano pakiet Matlab/Simulink
oraz platformę sprzętową firmy dSPACE do weryfikacji
zaproponowanych rozwiązań sterowania neuronowo-
rozmytego na obiekcie rzeczywistym, którym był mobil-
ny robot kołowy Pioneer 2DX. Zadaną trajektorię do
rozmytego sterowania ruchem nadążnym
Zenon Hendzel, Magdalena Muszyńska
61
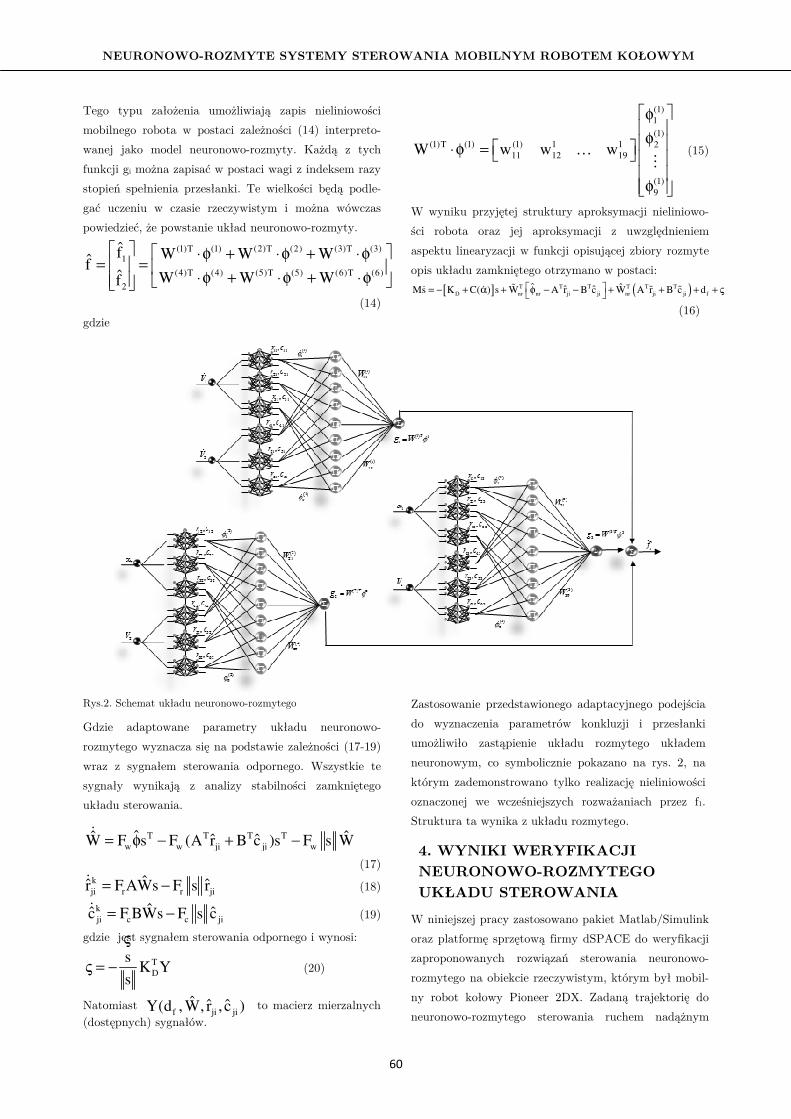
mobilnego robota przyjęto w kształcie pętli pokazanej
na rys. 3a. Została ona wyznaczona z zadania odwrot-
nego kinematyki. W badaniach weryfikacyjnych rozwa-
żano 5 etapów ruchu: był to rozruch, jazda ze stałą
prędkością, jazda po torze kołowym o promieniu R,
jazda po prostej oraz hamowanie.
a)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 6 6.5 7 7.5
x[m]
0
0.5
1
1.5
2
2.5
3
y[m
]
b)
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
t[s]0
15
30
45
60
75
90
105
120
135
α1,α
2
[ra
d]
c)
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
t[s]0
1
2
3
4
5
6
7
8
α.1,α.
2
[ra
d/s
]
d)
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
t[s]-12
-9
-6
-3
0
3
6
9
12
α..1,α..
2
[ra
d/s
2]
Rys. 3. a) zadana trajektoria ruchu punktu b) przemieszczenia
kątowe kół napędzających c) prędkości kątowe kół napędzają-
cych d) przyspieszenia kątowe kół napędzających
Wybrano trajektorię w kształcie pętli ponieważ jest to
typowa realizacja praktycznych rozwiązań. Weryfikacja
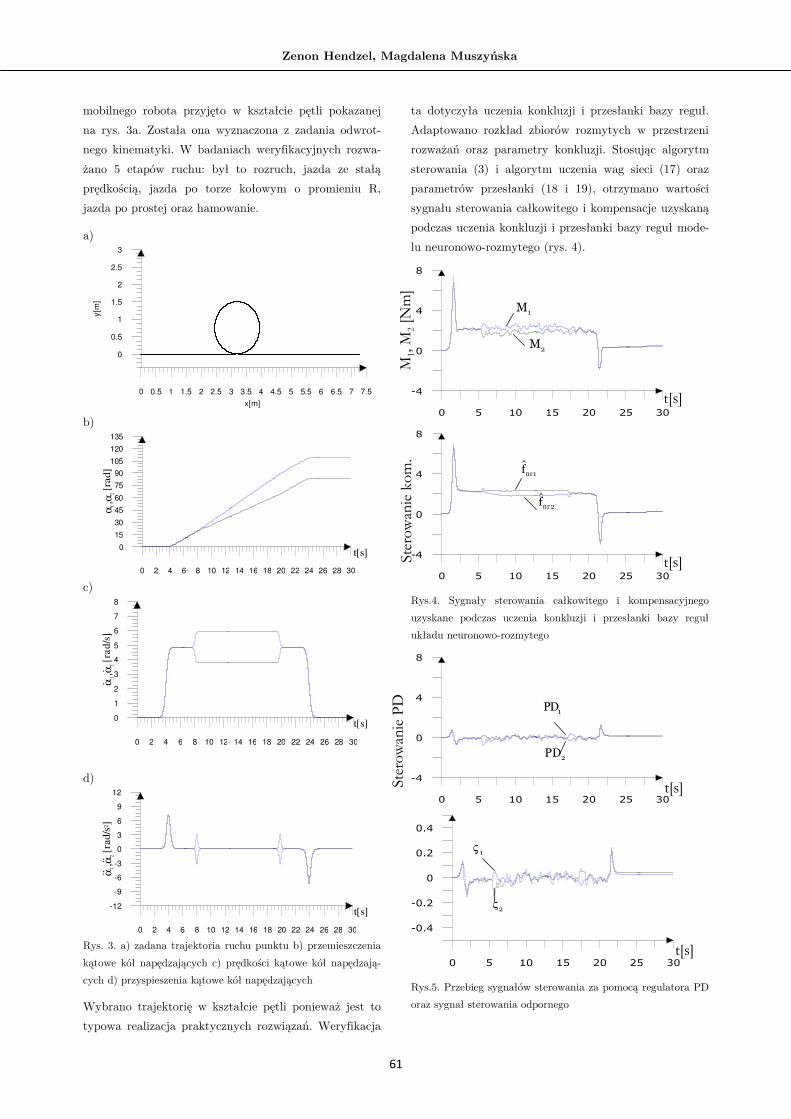
ta dotyczyła uczenia konkluzji i przesłanki bazy reguł.
Adaptowano rozkład zbiorów rozmytych w przestrzeni
rozważań oraz parametry konkluzji. Stosując algorytm
sterowania (3) i algorytm uczenia wag sieci (17) oraz
parametrów przesłanki (18 i 19), otrzymano wartości
sygnału sterowania całkowitego i kompensacje uzyskaną
podczas uczenia konkluzji i przesłanki bazy reguł mode-
lu neuronowo-rozmytego (rys. 4).
0 5 10 15 20 25 30
-4
0
4
8
0 5 10 15 20 25 30
-4
0
4
8
Rys.4. Sygnały sterowania całkowitego i kompensacyjnego
uzyskane podczas uczenia konkluzji i przesłanki bazy reguł
układu neuronowo-rozmytego
0 5 10 15 20 25 30
-4
0
4
8
0 5 10 15 20 25 30
-0.4
-0.2
0
0.2
0.4
Rys.5. Przebieg sygnałów sterowania za pomocą regulatora PD
oraz sygnał sterowania odpornego
1M
2M
M1, M2 [Nm]
t[s] Sterowanie kom.
[Nm]
t[s]
nr2f̂
nr1f̂
Sterowanie PD
[Nm]
t[s]
2
PD
1
PD
t[s]
1
ς
2
ς
NEURONOWO-ROZMYTE SYSTEMY STEROWANIA MOBILNYM ROBOTEM KOŁOWYM
62
0 5 10 15 20 25 30
-4
-2
0
2
4
0 5 10 15 20 25 30
-4
-2
0
2
4
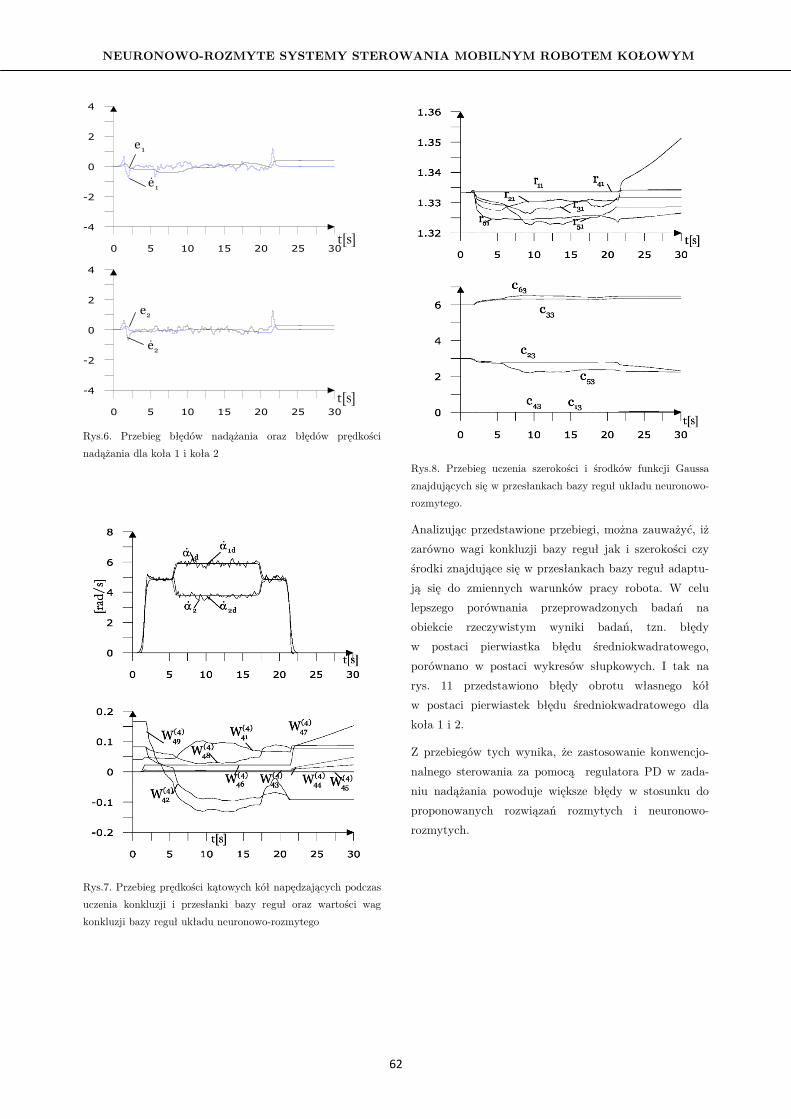
Rys.6. Przebieg błędów nadążania oraz błędów prędkości
nadążania dla koła 1 i koła 2
Rys.7. Przebieg prędkości kątowych kół napędzających podczas
uczenia konkluzji i przesłanki bazy reguł oraz wartości wag
konkluzji bazy reguł układu neuronowo-rozmytego
Rys.8. Przebieg uczenia szerokości i środków funkcji Gaussa
znajdujących się w przesłankach bazy reguł układu neuronowo-
rozmytego.
Analizując przedstawione przebiegi, można zauważyć, iż
zarówno wagi konkluzji bazy reguł jak i szerokości czy
środki znajdujące się w przesłankach bazy reguł adaptu-
ją się do zmiennych warunków pracy robota. W celu
lepszego porównania przeprowadzonych badań na
obiekcie rzeczywistym wyniki badań, tzn. błędy
w postaci pierwiastka błędu średniokwadratowego,
porównano w postaci wykresów słupkowych. I tak na
rys. 11 przedstawiono błędy obrotu własnego kół
w postaci pierwiastek błędu średniokwadratowego dla
koła 1 i 2.
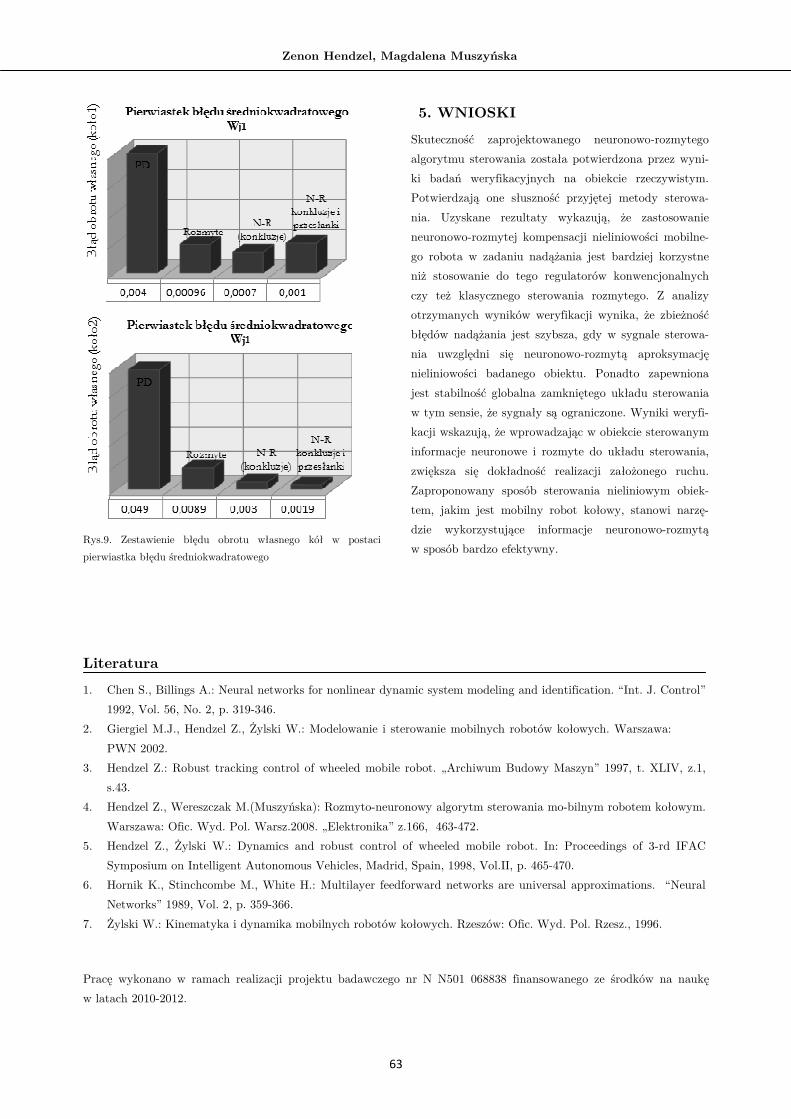
Z przebiegów tych wynika, że zastosowanie konwencjo-
nalnego sterowania za pomocą regulatora PD w zada-
niu nadążania powoduje większe błędy w stosunku do
proponowanych rozwiązań rozmytych i neuronowo-
rozmytych.
t[s]
1e
1e&
t[s]
2e&
2e
Zenon Hendzel, Magdalena Muszyńska
Rys.9. Zestawienie błędu obrotu własnego kół w postaci
pierwiastka błędu średniokwadratowego
Literatura
1. Chen S., Billings A.: Neural networks for nonlinear dynamic system modeling and identification.
1992, Vol. 56, No. 2, p. 319-346.
2. Giergiel M.J., Hendzel Z., Żylski W.: Modelowanie i sterowanie mobilnych robotów kołowych. Warszawa:
PWN 2002.
3. Hendzel Z.: Robust tracking control of wheeled mobile robot.
s.43.
4. Hendzel Z., Wereszczak M.(Muszyńska):
Warszawa: Ofic. Wyd. Pol. Warsz.2008. „Elektronika” z.166, 463
5. Hendzel Z., Żylski W.: Dynamics and robust control of wheeled mobile robot. In: Proceedings of 3
Symposium on Intelligent Autonomous Vehicles,
6. Hornik K., Stinchcombe M., White H.: Multilayer feedforward networks are universal approximations.
Networks” 1989, Vol. 2, p. 359-366.
7. Żylski W.: Kinematyka i dynamika mobilnych robotów kołowych. Rzeszów:
Pracę wykonano w ramach realizacji projektu badawczego nr N N501 068838 finansowanego ze środków na naukę
w latach 2010-2012.
Zenon Hendzel, Magdalena Muszyńska
63
Rys.9. Zestawienie błędu obrotu własnego kół w postaci
5. WNIOSKI
Skuteczność zaprojektowanego neuronowo
algorytmu sterowania została potwierdzona przez wyn
ki badań weryfikacyjnych na
Potwierdzają one słuszność przyjętej metody sterow
nia. Uzyskane rezultaty wykazują, że zastosowanie
neuronowo-rozmytej kompensacji nieliniowości mobiln
go robota w zadaniu nadążania jest bardziej korzystne
niż stosowanie do tego regulatorów konwencjonalnych
czy też klasycznego sterowania rozmytego. Z analizy
otrzymanych wyników weryfikacji wynika, że zbieżność
błędów nadążania jest szybsza, gdy w sygnale sterow
nia uwzględni się neuronowo
nieliniowości badanego obiektu. Ponadto zapewniona
jest stabilność globalna zamkniętego układu sterowania
w tym sensie, że sygnały są ograniczone. Wyniki weryf
kacji wskazują, że wprowadzając w obiekcie sterowanym
informacje neuronowe i rozmyte do układu sterowania,
zwiększa się dokładność realizacji założonego ruchu.
Zaproponowany sposób sterowania nieliniowym obie
tem, jakim jest mobilny robot kołowy, stanowi narz
dzie wykorzystujące informacje neuronowo
w sposób bardzo efektywny.
Chen S., Billings A.: Neural networks for nonlinear dynamic system modeling and identification.
W.: Modelowanie i sterowanie mobilnych robotów kołowych. Warszawa:
Hendzel Z.: Robust tracking control of wheeled mobile robot. „Archiwum Budowy Maszyn” 1997, t. XLIV, z.1,
Hendzel Z., Wereszczak M.(Muszyńska): Rozmyto-neuronowy algorytm sterowania mo-bilnym robotem kołowym.
Ofic. Wyd. Pol. Warsz.2008. „Elektronika” z.166, 463-472.
Hendzel Z., Żylski W.: Dynamics and robust control of wheeled mobile robot. In: Proceedings of 3
Symposium on Intelligent Autonomous Vehicles, Madrid, Spain, 1998, Vol.II, p. 465-470.
Hornik K., Stinchcombe M., White H.: Multilayer feedforward networks are universal approximations.
366.
Żylski W.: Kinematyka i dynamika mobilnych robotów kołowych. Rzeszów: Ofic. Wyd. Pol. Rzesz., 1996.
Pracę wykonano w ramach realizacji projektu badawczego nr N N501 068838 finansowanego ze środków na naukę
Skuteczność zaprojektowanego neuronowo-rozmytego
algorytmu sterowania została potwierdzona przez wyni-
ki badań weryfikacyjnych na obiekcie rzeczywistym.
Potwierdzają one słuszność przyjętej metody sterowa-
nia. Uzyskane rezultaty wykazują, że zastosowanie
rozmytej kompensacji nieliniowości mobilne-
go robota w zadaniu nadążania jest bardziej korzystne
ulatorów konwencjonalnych
czy też klasycznego sterowania rozmytego. Z analizy
otrzymanych wyników weryfikacji wynika, że zbieżność
błędów nadążania jest szybsza, gdy w sygnale sterowa-
nia uwzględni się neuronowo-rozmytą aproksymację
biektu. Ponadto zapewniona
jest stabilność globalna zamkniętego układu sterowania
w tym sensie, że sygnały są ograniczone. Wyniki weryfi-
kacji wskazują, że wprowadzając w obiekcie sterowanym
informacje neuronowe i rozmyte do układu sterowania,
dokładność realizacji założonego ruchu.
Zaproponowany sposób sterowania nieliniowym obiek-
tem, jakim jest mobilny robot kołowy, stanowi narzę-
dzie wykorzystujące informacje neuronowo-rozmytą
Chen S., Billings A.: Neural networks for nonlinear dynamic system modeling and identification. “Int. J. Control”
W.: Modelowanie i sterowanie mobilnych robotów kołowych. Warszawa:
„Archiwum Budowy Maszyn” 1997, t. XLIV, z.1,
bilnym robotem kołowym.
Hendzel Z., Żylski W.: Dynamics and robust control of wheeled mobile robot. In: Proceedings of 3-rd IFAC
470.
Hornik K., Stinchcombe M., White H.: Multilayer feedforward networks are universal approximations. “Neural
Ofic. Wyd. Pol. Rzesz., 1996.
Pracę wykonano w ramach realizacji projektu badawczego nr N N501 068838 finansowanego ze środków na naukę