Marian KOPCZEWSKI, Bartłomiej PĄCZEK Systemy ...
11
16 Marian KOPCZEWSKI, Bartłomiej PĄCZEK Wydział Dowodzenia i Operacji Morskich, Akademia Marynarki Wojennej w Gdyni E-mail: [email protected] Systemy komputerowego sterowania stosowane w bezzałogowych statkach powietrznych Streszczenie: W artykule przedstawiono dziedziny zastosowań militarnych oraz możliwości taktycznych bezzałogowych statków powietrznych (BSP) na współczesnym polu walki. Dokonano klasyfikacji bezzałogowych stat- ków powietrznych i rodzajów ich misji taktycznych. Przeanalizowano możliwości wykorzystania BSP w dziedzinie rozpoznania i walki radio- elektronicznej. Podano podstawowe charakterystyki taktyczno-techniczne wybranych urządzeń rozpoznania zainstalowanych na BSP. Zaprezento- wano futurologiczne plany rozwoju bezzałogowych statków powietrznych. 1. Wprowadzenie W dobie XXI wieku bezzałogowe statki powietrzne (BSP) są jedną z podstawowych broni na współczesnym polu walki. Lista dziedzin zastosowań militarnych oraz możliwości misji taktycznych bezzałogowych statków powietrznych jest obszerna i zmienia się wraz z burz- liwym rozwojem techniki z zakresu sprzętu elektronicznego i szybkiej obróbki danych. Koniec zimnej wojny spowodował, że potęgą militarną na świecie stały się międzynarodowe organizacje, takie jak NATO oraz wielkie mocarstwa. Nowoczesna technologia daje coraz to nowsze możliwości w zakresie sprawnego i bezpiecznego prowadzenia rozpoznania oraz prowadzenia walki we współczesnych konfliktach zbrojnych. Bezzałogowe statki powietrz- ne mogą być efektywnie wykorzystane w warunkach pokojowych w wielu dziedzinach militarnych. Wyrzucenie prawdziwego pilota z kabiny przynosi naprawdę wiele korzyści. Po pierwsze, i to z pewnością jest najważniejsze dla pilota – człowieka nie jest on narażony na śmierć czy niewolę w przypadku niepowodzenia akcji. Po drugie pilot jest najsłabszym ogniwem statku powietrznego, zarówno pod względem fizycznym jak i psychicznym. Bez- załogowe statki powietrzne zapewniają bezpieczeństwo i gwarantują wykonanie podobnych misji bez narażania życia przez osoby je wykonujące. Ważnym aspektem inwestowania w rozwój i eksploatacje systemów bezzałogowych dla potrzeb militarnych i nie tylko są korzyści ekonomiczne. Wyszkolenie pilota kosztuje kilka milionów dolarów, natomiast jedna załoga BSP może obsługiwać wiele pojazdów bez narażania życia. Strata pilota podczas wykonywania zadania niesie ze sobą poważne
-
Upload
duongthuan -
Category
Documents
-
view
218 -
download
3
Transcript of Marian KOPCZEWSKI, Bartłomiej PĄCZEK Systemy ...

16
Marian KOPCZEWSKI, Bartłomiej PĄCZEK Wydział Dowodzenia i Operacji Morskich,
Akademia Marynarki Wojennej w Gdyni
E-mail: [email protected]
Systemy komputerowego sterowania stosowane
w bezzałogowych statkach powietrznych
Streszczenie: W artykule przedstawiono dziedziny zastosowań militarnych
oraz możliwości taktycznych bezzałogowych statków powietrznych (BSP)
na współczesnym polu walki. Dokonano klasyfikacji bezzałogowych stat-
ków powietrznych i rodzajów ich misji taktycznych. Przeanalizowano
możliwości wykorzystania BSP w dziedzinie rozpoznania i walki radio-
elektronicznej. Podano podstawowe charakterystyki taktyczno-techniczne
wybranych urządzeń rozpoznania zainstalowanych na BSP. Zaprezento-
wano futurologiczne plany rozwoju bezzałogowych statków powietrznych.
1. Wprowadzenie
W dobie XXI wieku bezzałogowe statki powietrzne (BSP) są jedną z podstawowych broni
na współczesnym polu walki. Lista dziedzin zastosowań militarnych oraz możliwości misji
taktycznych bezzałogowych statków powietrznych jest obszerna i zmienia się wraz z burz-
liwym rozwojem techniki z zakresu sprzętu elektronicznego i szybkiej obróbki danych.
Koniec zimnej wojny spowodował, że potęgą militarną na świecie stały się międzynarodowe
organizacje, takie jak NATO oraz wielkie mocarstwa. Nowoczesna technologia daje coraz to
nowsze możliwości w zakresie sprawnego i bezpiecznego prowadzenia rozpoznania oraz
prowadzenia walki we współczesnych konfliktach zbrojnych. Bezzałogowe statki powietrz-
ne mogą być efektywnie wykorzystane w warunkach pokojowych w wielu dziedzinach
militarnych. Wyrzucenie prawdziwego pilota z kabiny przynosi naprawdę wiele korzyści. Po
pierwsze, i to z pewnością jest najważniejsze dla pilota – człowieka nie jest on narażony na
śmierć czy niewolę w przypadku niepowodzenia akcji. Po drugie pilot jest najsłabszym
ogniwem statku powietrznego, zarówno pod względem fizycznym jak i psychicznym. Bez-
załogowe statki powietrzne zapewniają bezpieczeństwo i gwarantują wykonanie podobnych
misji bez narażania życia przez osoby je wykonujące.
Ważnym aspektem inwestowania w rozwój i eksploatacje systemów bezzałogowych dla
potrzeb militarnych i nie tylko są korzyści ekonomiczne. Wyszkolenie pilota kosztuje
kilka milionów dolarów, natomiast jedna załoga BSP może obsługiwać wiele pojazdów
bez narażania życia. Strata pilota podczas wykonywania zadania niesie ze sobą poważne

17
konsekwencje polityczne jak i finansowe, natomiast strata BSP ma dużo mniejsze konse-kwencje głównie finansowe.
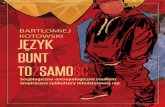
2. Klasyfikacja bezzałogowych statków powietrznych Bezzałogowe statki powietrzne są przeznaczone do wykonania misji bez udziału załogi. Ze względu na rodzaj sterowania BSP można podzielić na automatyczne i półautomatycz-ne. W skład każdego bezzałogowego statku powietrznego wchodzą następujące systemy:
• statek powietrzny; • urządzenia łączności; • urządzenia kierowania lotem (naziemna stacja); • system odbioru, analizy oraz zobrazowania danych; • zaplecze techniczno – logistyczne.
Klasyfikacji BSP można dokonać ze względu na wielkość pojazdu oraz jego zasięgów operacyjnych takich jak: zasięg patrolowania, pułap patrolowania oraz czas patrolowa-nia. Czas patrolowania – jest to przedział czasu w którym BSP może wykonać misję, zależy on ściśle od ilości paliwa jaką pojazd może zabrać na pokład.
Zasięgi operacyjne – są to przedziały wartości liczbowych, w zakresie których BSP mo-że w pełni wykonać określoną misję.
W ogólnej klasyfikacji bezzałogowych statków powietrznych wyróżniamy następujące rodzaje:
• BSP klasy mikro i mini; • BSP ograniczonego zasięgu; • BSP bliskiego zasięgu; • BSP średniego zasięgu; • BSP dalekiego zasięgu; • BSP niskiego pułapu; • strategiczne BSP; • ofensywne BSP; • BSP napędzane energią słoneczną.

18
Rys. 1. Skład systemu BSP
Jak wygląda nowoczesny bezpilotowy aparat lotniczy, używany do celów taktycznych? Przeważnie jest to maszyna, której wymiary wahają się od startującego z wolnej ręki samolociku do okazów a rozpiętością skrzydeł 3 – 4 m, masie startowej od kilku kilogra-mów do 200 kg, w tym około 75 kg ładunku użytkowego. Napędzany energią słoneczną lub silnikami spalinowymi o mocy do 50 koni mechanicznych rozwija prędkość do 200 km/godz., potrafi utrzymywać się w powietrzu do 6 godzin i działać w promieniu 200 km od stanowiska sterowania. Małe rozmiary i silnik, który nie wytwarza dużych ilości ciepła czynią samolocik o wiele trudniejszym do wykrycia środkami obserwacji wizualnej, radiowej oraz termowizyjnej. BSP wytwarza ponadto niepowtarzalnie mniej hałasu niż odpowiednik załogowy i może skradać się do celu na małej wysokości, ukazu-jąc się nawet przy tak małej prędkości niespodziewanie i jedynie na krótką chwilę.
Zwrotność tej maszyny jest zdecydowanie większa niż śmigłowca, nie mówiąc już o samolotach bojowych. Wszystko to czyni pozornie powolny aparat celem dość trud-nym do zniszczenia konwencjonalnymi środkami obrony przeciwlotniczej. Zaś mała emisja cieplna utrudnia działanie głowic samonaprowadzających. Pomijamy tu problem stosunku kosztów takiej rakiety do aparatu bezzałogowego. Nikt nie będzie strzelał rakietą za milion dolarów do UAV wartego sto czy dwieście tysięcy.
Bezpilotowy aparat lotniczy startuje przeważnie z katapulty zamontowanej na podwoziu samochodu lub pokładzie okrętu. Pulpit sterowania samolocikiem może znajdować się w tym samym lub innym pojeździe bezpośrednio w miejscu startu lub w pewnej odle-głości w zależności od zadań. Za pomocą kilkunastometrowej teleskopowej anteny możliwa jest łączność między pulpitem sterującym a znajdującą się w powietrzu ma-szyną. Zaawansowany program umożliwia operatorowi prowadzenie maszyny, zaś kamery optyczne i termowizyjne przesyłają na ekran monitora wszystko to co widzą. Mocny zoom optyczny, wspomagany elektronicznym wzmacniaczem obrazu, umożli-wia zmianę kątów widzenia do szerokiej, panoramicznej wizji, aż po wyodrębnienie najdrobniejszych szczegółów. Zaawansowana elektronika umożliwia zablokowanie spojrzenia kamer na konkretnym obiekcie i śledzenie go, niezależnie od jego ruchów i ruchu samego aparatu lotniczego. Po wykonaniu misji maszyna może być sprowadzo-

na do bazy ręcznie lub automatycznie, gdmaszyny jak i lądowiska. Po powrocie maszyna najczęściej opada na spadochronie, co w jeszcze większym stopniu upraszcza jego konstrukcję. Natomiast na wypadek zstrzelenia maszyna może być wyposażona w ładunek de
Wyposażenie takiego BSP jest zależne od jego misji i zadań jakie ma wykonywać. Wyróżnić można wiele rodzajów misji, jakie może wykonywać taki samolocik, wśród których do najczęściej wykonywanych zaliczamy:
Rys. 2. Wizja zastosowań
Kierowanie działaniami bojowymi wysunięty punkt dowodzenia, który dokładnie wijak i przeciwnika oraz umożliwia przesyłan
Wykrywanie i wskazywanie min wykrywanie min zarówno na lądzie jak i na wodzie. Do precyzyjnego określenia położenia min używane są celowniki laserowe.
Walka elektroniczna nych środków radioelektronicznych przeciwnika w szerokim paśmie częstotliwości przy jednoczesnym chronieniu własnych.
19
na do bazy ręcznie lub automatycznie, gdyż system nawigacyjny GPS określa położenie lądowiska. Po powrocie maszyna najczęściej opada na spadochronie, co
w jeszcze większym stopniu upraszcza jego konstrukcję. Natomiast na wypadek zlenia maszyna może być wyposażona w ładunek destrukcyjny.
Wyposażenie takiego BSP jest zależne od jego misji i zadań jakie ma wykonywać. Wyróżnić można wiele rodzajów misji, jakie może wykonywać taki samolocik, wśród których do najczęściej wykonywanych zaliczamy:
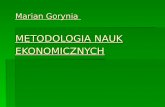
Rys. 2. Wizja zastosowań taktycznych bezpilotowych aparatów lotniczych
Kierowanie działaniami bojowymi – są to misje, które mają na celu zapewnić dowódzwysunięty punkt dowodzenia, który dokładnie widzi działania zarówno wojsk włajak i przeciwnika oraz umożliwia przesyłanie komend do poszczególnych pododdziałów.
Wykrywanie i wskazywanie min – są to misje, które mają na celu skryte i bezstratne wykrywanie min zarówno na lądzie jak i na wodzie. Do precyzyjnego określenia położenia min używane są celowniki laserowe.
elektroniczna – są to misje mające na celu wykrywanie i obezwładnianie aktynych środków radioelektronicznych przeciwnika w szerokim paśmie częstotliwości przy jednoczesnym chronieniu własnych.
yż system nawigacyjny GPS określa położenie lądowiska. Po powrocie maszyna najczęściej opada na spadochronie, co
w jeszcze większym stopniu upraszcza jego konstrukcję. Natomiast na wypadek ze-
Wyposażenie takiego BSP jest zależne od jego misji i zadań jakie ma wykonywać. Wy-różnić można wiele rodzajów misji, jakie może wykonywać taki samolocik, wśród któ-
taktycznych bezpilotowych aparatów lotniczych
re mają na celu zapewnić dowództwu dzi działania zarówno wojsk własnych
ie komend do poszczególnych pododdziałów.
są to misje, które mają na celu skryte i bezstratne wykrywanie min zarówno na lądzie jak i na wodzie. Do precyzyjnego określenia poło-
są to misje mające na celu wykrywanie i obezwładnianie aktyw-nych środków radioelektronicznych przeciwnika w szerokim paśmie częstotliwości przy

20
Rozpoznawanie sygnałów radioelektronicznych – są to misje prowadzone systematycz-nie w czasie pokoju, mające na celu wykrywanie, lokalizację, rozpoznawanie i śledzenie sposobów pracy środków radioelektronicznych.
Detekcja skażeń chemicznych i biologicznych – są to misje mające na celu wykry-wanie obszarów skażonych chemicznie i biologicznie bez narażania życia.
Rozpoznawanie sposobów maskowania – są to misje, które dostarczają informacje w postaci zdjęć, które po odpowiedniej filtracji pozwalają wykryć zamaskowane obiekty.
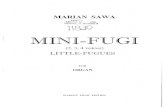
Rys. 3. Rodzaje misji bezzałogowych aparatów lotniczych
3. Charakterystyka urządzeń stosowanych na BSP Wymagania w stosunku do urządzeń i sprzętu występującego na BSP są bardzo wyso-kie. Główne czynniki to małe wymiary i jak najmniejszy ciężar, a zarazem muszą się one charakteryzować bardzo dobrymi parametrami i odpornością na trudne warunki pracy. Dopiero szybki rozwój technologiczny w latach 90. umożliwił konstruowanie małych gabarytowo zespołów spełniających w dużej mierze te wymagania:
• odbiór, pomiar i analiza parametrów wszystkich rodzajów sygnałów radiolo-kacyjnych;
• szerokie pasmo częstotliwości od 0,2 – 50 GHz; • duża czułość powyżej 100 dB; • duża dynamika powyżej 50 dB; • duża rozróżnialność w częstotliwości umożliwiająca pomiar chwilowej wartości
częstotliwości z dużą częstością; • prawdopodobieństwo przechwycenia sygnału bliskie jedności; • zdolność do odbioru sygnału o dużej ilości impulsów;
Rodzaje misji taktycznych BSP
Wskazywanie celów
Walka elektroniczna
Działania przeciw maskowaniu
Kierowanie walką
Wykrywanie min
Akcje ratownicze
Rozpoznawanie obrazów
Walka elektroniczna
Wykrywanie skażeń
Przekaźnik telekomunikacyjny

• szybki i monoimpulsowy pomiar kierunku na źródła przy jednoczesnym okrężnym widzeniu przestrzeni sygnałowej;
• szybka analiza parametrów i ich k• możliwość rejestracji dużych zbio• małe gabaryty oraz mały pobór mocy.
Wysokie wymagania i parametry powodują, że klasa urządzeń występujących na BSP jest bardzo wysoka. Coraz to nowocześniejsza technologia i szybwodują, że wymagania odnośnie tych urządzeń znacznie się zwiększają. Jedną z głównych grup odbiorników występujących na BSP są odbiorniki szerokopasmowe. Do tej grupy możemy zaliczy:
• odbiornik dekadowy charakteryzujący się pasmem (rysunek 4). Jego zaletami są małe gabaryty i pobór mocy. Stosowany jest w zestwach ostrzegawczych;
Rys. 4. Odbiornik dekadowy
• odbiornik wielokanałowy superheterodynowy bwcz wraz z m
• odbiornik natychmiastowego pomiaru częstotliwości IFM umożliwiający pomiar częstotliwości chwilowej oraz zmian wrealizowany jest cyfrowo. Odbi dynamiką w całym paśmie;
• szerokopasmowy odbiornik IFF zapewniający pokryStosuje się w nim w pierwszej kolejności przemianę częstotliwości na pcz, której psmo pokrywa jakąś ok
• odbiornik z komórką Bragga wykorzystujący zjawisko załamania się światła w krystale pod wpływem częstotliwości sygnału przyłożonego do elektrody. Odbiornik ten charakteryzuje się małą czułością i
• odbiornik kompresyjny stosowany do badania sygnału impulsowego z wewnętrzną modulacja częstotliwości;
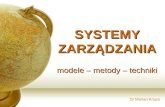
• odbiornik cyfrowy postać cyfrową, który następnie zostaje poddawany szybkiej aści są ekwiwalentne tysiącu równoległych odbiorników IFM pracujących w oktawie o szerokości pasma 500 kHz.
21
szybki i monoimpulsowy pomiar kierunku na źródła przy jednoczesnym okrężnym widzeniu przestrzeni sygnałowej; szybka analiza parametrów i ich klasyfikacja z dużą dokładnością; możliwość rejestracji dużych zbiorów danych; małe gabaryty oraz mały pobór mocy.
Wysokie wymagania i parametry powodują, że klasa urządzeń występujących na BSP jest bardzo wysoka. Coraz to nowocześniejsza technologia i szybki rozwój techniki powodują, że wymagania odnośnie tych urządzeń znacznie się zwiększają. Jedną z głównych grup odbiorników występujących na BSP są odbiorniki szerokopasmowe. Do tej grupy możemy zaliczy:
odbiornik dekadowy charakteryzujący się pasmem bwcz, małą czułością i dynamiką ). Jego zaletami są małe gabaryty i pobór mocy. Stosowany jest w zest
wach ostrzegawczych;
Rys. 4. Odbiornik dekadowy
odbiornik wielokanałowy superheterodynowy – w jego skład wchodzi kilka kanałów na bwcz wraz z mieszaczami, które następnie wszystkie są sprowadzane do jednego na pcz;odbiornik natychmiastowego pomiaru częstotliwości IFM umożliwiający pomiar częstotliwości chwilowej oraz zmian wewnątrz impulsowych. Pomiar częrealizowany jest cyfrowo. Odbiornik ten charakteryzuje się dużą rozróżnial
dynamiką w całym paśmie; szerokopasmowy odbiornik IFF zapewniający pokrycie kilkuoktawowego paStosuje się w nim w pierwszej kolejności przemianę częstotliwości na pcz, której psmo pokrywa jakąś oktawę a następnie wykorzystywany jest odbiornik IFM,odbiornik z komórką Bragga wykorzystujący zjawisko załamania się światła w krystale pod wpływem częstotliwości sygnału przyłożonego do elektrody. Odbiornik ten charakteryzuje się małą czułością i dynamiką; odbiornik kompresyjny stosowany do badania sygnału impulsowego z wewnętrzną modulacja częstotliwości; odbiornik cyfrowy – jest to odbiornik próbkujący sygnał bwcz i przetwarzający go na postać cyfrową, który następnie zostaje poddawany szybkiej analizie. Jego możliwści są ekwiwalentne tysiącu równoległych odbiorników IFM pracujących w oktawie
szerokości pasma 500 kHz.
szybki i monoimpulsowy pomiar kierunku na źródła przy jednoczesnym okrężnym
Wysokie wymagania i parametry powodują, że klasa urządzeń występujących na BSP ki rozwój techniki po-
wodują, że wymagania odnośnie tych urządzeń znacznie się zwiększają. Jedną z głów-nych grup odbiorników występujących na BSP są odbiorniki szerokopasmowe. Do tej
małą czułością i dynamiką ). Jego zaletami są małe gabaryty i pobór mocy. Stosowany jest w zesta-
w jego skład wchodzi kilka kanałów na ieszaczami, które następnie wszystkie są sprowadzane do jednego na pcz;
odbiornik natychmiastowego pomiaru częstotliwości IFM umożliwiający pomiar ewnątrz impulsowych. Pomiar częstotliwości
iornik ten charakteryzuje się dużą rozróżnialnością
cie kilkuoktawowego pasma. Stosuje się w nim w pierwszej kolejności przemianę częstotliwości na pcz, której pa-
korzystywany jest odbiornik IFM, odbiornik z komórką Bragga wykorzystujący zjawisko załamania się światła w krysz-tale pod wpływem częstotliwości sygnału przyłożonego do elektrody. Odbiornik ten
odbiornik kompresyjny stosowany do badania sygnału impulsowego z wewnętrzną
jest to odbiornik próbkujący sygnał bwcz i przetwarzający go na nalizie. Jego możliwo-
ści są ekwiwalentne tysiącu równoległych odbiorników IFM pracujących w oktawie

22
Rys. 5. Odbiornik cyfrowy
Kolejna rodzina urządzeń występujących na BSP to różnego rodzaju kamery i aparaty.
Charakteryzują się one bardzo dużą rozdzielczością od 2400 dpi i mocniejszą. Są to
odbiorniki z bardzo mocnym zoomem, pozwalające wykonywać obrazy z bardzo dużą
dokładnością i z dużej wysokości. W zależności od postawionego zadania mogą być to
urządzenia termowizyjne, noktowizyjne, dziennego widzenia oraz na podczerwień.
4. Przykłady BSP
Po wstrzymaniu 7 stycznia 1991 roku produkcji niewidzialnego dla radarów samolotu
A-12 Avenger II, Amerykańska Marynarka Wojenna pozostała jedyną formacją armii
USA, bez rychłych perspektyw na otrzymanie innego samolotu wykonanego w nowo-
czesnej technologii stealth. Stan taki trwał do początków roku 2001, kiedy to 27 lutego
w trakcie ceremonii otwarcia dopiero co powstałego w Kalifornii ośrodka nowych tech-
nologii (ASDC), korporacja Northrop Grumman zaskoczyła przybyłych gości konstruk-
cją o iście kosmicznym wyglądzie.
Northop X-47A Pegasus stanowi część realizowanego przez DARPA i US Navy pro-
gramu studyjno-projektowego, mającego na celu opracowanie morskiej wersji UCAV.
W przyszłości maszyny te mają być standardowo używane przez US Navy w trakcie
prowadzonych z pokładów lotniskowców akcji przełamywania obrony powietrznej
przeciwnika, bezpośrednich uderzeń na wrogie cele i misji rozpoznawczo-patrolowych.
Mający kształt idealnego rombu Pegasus pozbawiony jest jakichkolwiek stateczników
pionowych. Całość płatowca wykonana jest w znacznym procencie z materiałów kom-
pozytowych. Jeżeli projekt Pegasusa spełni wymagania DARPA i US NAVY, to na jego
bazie powstanie pierwszy produkowany seryjnie morski bojowy samolot bezzałogowy.
Memory Digital processor
Frequency tuning
DAC
DAC
90°°°°
LO
Antenna
RF amp Mixer
MF amp MF filter
Matchable RF filter
Tunable local oscilator

Rys. 6. X - 47A
W kontekście takiej perspektywy, już teraz wiadomo, że seryjny Pegasus będzie legitymować się o wiele lepszymi parametrami, niż jego badany obecnie demonstrator. Prawie dwukrotnie zwiększy się masa użyteczna,uzbrojenia. Poprawiona zostanie również wytrzymałość konstrukcji, która docelowo ma znosić przeciążenia aż 15 g. W trakcie misji bojowych, Pegasus powinien obyć się bez tankowania przez 12 godzin.
Dane techniczne X5C-TF; masa całkowita
Kolejnym przykładem jest SHARK. Już w kwietniu 1999 roku kilka szwedzkich firm rozpoczęło wspólne opracowywanie koncepcji dla przyszłego bojowego sazałogowego. Pierwszym etapem tych prac, była faza studialna, mająca na celu teoretyczne określenie aż dziewięciu różnorodnych aerodynamicznie rodzajów UCAV. Jeden z nich oznaczony jako 272 UAV SHARK aerodynamicznym. Szwzaległości (w porównaniu ze Stanami Zjednoczonymi) w badaniach nad technologią stealth, próbują teraz upiec dwie pieczenie na jednym ogniu. Efektem tych dążeń, ma być flotylla niezwykle zaawansowanych bojowych BSP, które prawdopodobnie już za kilkanaście lat staną się podstawowym elementem szwedzkich sił powietrznych. Będą one – podobnie jak ich amerykańskie odpowiedniki bojowe misje wspólnie z nadzorująobiekty niewidzialne dla radaru. W przypadku badanego obecnie demonstratora SHARK, technologia stealth, powinna stanowić cechę niemal priorytetową. Jak bowiem twierdzą szwedzcy konstruktorzy, obiekt ma być szatem sposobem na zmniejszenie prawdopodobieństwa jego zestrzelenia, jest zdecydwana eliminacja echa radarowego.
23
W kontekście takiej perspektywy, już teraz wiadomo, że seryjny Pegasus będzie legitymować się o wiele lepszymi parametrami, niż jego badany obecnie demonstrator. Prawie dwukrotnie zwiększy się masa użyteczna, co pozwoli na załadunek około uzbrojenia. Poprawiona zostanie również wytrzymałość konstrukcji, która docelowo ma znosić przeciążenia aż 15 g. W trakcie misji bojowych, Pegasus powinien obyć się bez tankowania przez 12 godzin.
Dane techniczne X-47A: długość – 8,5 m; szerokość – 8,47 m; silnik masa całkowita – 2494 kg; masa użyteczna – 453 kg.
Kolejnym przykładem jest SHARK. Już w kwietniu 1999 roku kilka szwedzkich firm rozpoczęło wspólne opracowywanie koncepcji dla przyszłego bojowego sazałogowego. Pierwszym etapem tych prac, była faza studialna, mająca na celu teoretyczne określenie aż dziewięciu różnorodnych aerodynamicznie rodzajów UCAV. Jeden z nich oznaczony jako 272 UAV SHARK – został następnie poddany testom w tunelu
rodynamicznym. Szwedzi, którzy podobnie jak inne kraje europejskie mają duże zaległości (w porównaniu ze Stanami Zjednoczonymi) w badaniach nad technologią stealth, próbują teraz upiec dwie pieczenie na jednym ogniu. Efektem tych dążeń, ma
zwykle zaawansowanych bojowych BSP, które prawdopodobnie już za kilkanaście lat staną się podstawowym elementem szwedzkich sił powietrznych. Będą
podobnie jak ich amerykańskie odpowiedniki – mogły nie tylko wykonywać bojowe misje wspólnie z nadzorującymi je samolotami załogowymi, ale stanowić będą obiekty niewidzialne dla radaru. W przypadku badanego obecnie demonstratora SHARK, technologia stealth, powinna stanowić cechę niemal priorytetową. Jak bowiem twierdzą szwedzcy konstruktorzy, obiekt ma być stosunkowo mało zwrotny. Jedynym zatem sposobem na zmniejszenie prawdopodobieństwa jego zestrzelenia, jest zdecydwana eliminacja echa radarowego.
W kontekście takiej perspektywy, już teraz wiadomo, że seryjny Pegasus będzie legi-tymować się o wiele lepszymi parametrami, niż jego badany obecnie demonstrator.
oli na załadunek około 900 kg uzbrojenia. Poprawiona zostanie również wytrzymałość konstrukcji, która docelowo ma znosić przeciążenia aż 15 g. W trakcie misji bojowych, Pegasus powinien obyć się bez
silnik – P&W JT15D-
Kolejnym przykładem jest SHARK. Już w kwietniu 1999 roku kilka szwedzkich firm rozpoczęło wspólne opracowywanie koncepcji dla przyszłego bojowego samolotu bez-załogowego. Pierwszym etapem tych prac, była faza studialna, mająca na celu teore-tyczne określenie aż dziewięciu różnorodnych aerodynamicznie rodzajów UCAV. Jeden
został następnie poddany testom w tunelu kraje europejskie mają duże
zaległości (w porównaniu ze Stanami Zjednoczonymi) w badaniach nad technologią stealth, próbują teraz upiec dwie pieczenie na jednym ogniu. Efektem tych dążeń, ma
zwykle zaawansowanych bojowych BSP, które prawdopodobnie już za kilkanaście lat staną się podstawowym elementem szwedzkich sił powietrznych. Będą
mogły nie tylko wykonywać cymi je samolotami załogowymi, ale stanowić będą
obiekty niewidzialne dla radaru. W przypadku badanego obecnie demonstratora SHARK, technologia stealth, powinna stanowić cechę niemal priorytetową. Jak bowiem
tosunkowo mało zwrotny. Jedynym zatem sposobem na zmniejszenie prawdopodobieństwa jego zestrzelenia, jest zdecydo-

Rys. 8. Shark
Dane techniczne UCAV wita – 5000 kg.
Kolejnym przykładem BSP jest Petit Duc. Współdziałająca od kilku lat z brytyjską BAe i wymieniająca z nią doświadczenia nad obiektami bezzałogowymi francuska firma Dasault Aviation, już 18 lipca 2001 roku przeprowadziła pierwszy udany (10lot własnego demonstratora BSP. Bezzpilotowiec ten określany jako PetitKsiążę) jest nie tylko wyjściową konstrukcją do opracowania w przyszłości całej rodziny, ale stanowi także obiekt niezwykle zaawansowany pod względem zastosowanej w nim technologii stealth, o czym dobitnie świadczyć może jego skuteczna powierzchnia odbicia porównywalna z małym ptakiem. Pod względem kształtu płatowca, Petitdem zupełnie unikalnym. Trójkątne skrzydła gładko przechodzą w mający identyczny układ kadłub, zaopatrzony w tylnej części w dwa lekko ukośne stateczniki pionowe.
Rys. 9. Petit Duc
Dane techniczne Petitkg; zasięg – 150 km;
Przedstawiając nowoczesne BSP nie wietrznych. Siły zbrojne USA doceniły znaczenie miniaturowych BSP i już w 1998 roku Naval Research Laboratory oraz DARPA (program finansowany przez wojsko, p
24
Dane techniczne UCAV – SHARK: rozpiętość – 8,0 m; długość – 10,0 m;
Kolejnym przykładem BSP jest Petit Duc. Współdziałająca od kilku lat z brytyjską BAe wymieniająca z nią doświadczenia nad obiektami bezzałogowymi francuska firma Da
sault Aviation, już 18 lipca 2001 roku przeprowadziła pierwszy udany (10lot własnego demonstratora BSP. Bezzpilotowiec ten określany jako PetitKsiążę) jest nie tylko wyjściową konstrukcją do opracowania w przyszłości całej rodziny, ale stanowi także obiekt niezwykle zaawansowany pod względem zastosowanej w nim
ologii stealth, o czym dobitnie świadczyć może jego skuteczna powierzchnia odbicia porównywalna z małym ptakiem. Pod względem kształtu płatowca, Petitdem zupełnie unikalnym. Trójkątne skrzydła gładko przechodzą w mający identyczny
ub, zaopatrzony w tylnej części w dwa lekko ukośne stateczniki pionowe.
Dane techniczne Petit-Duc: rozpiętość – 2,4 m; długość – 2,4 m; masa całkowita 150 km; prędkość max – 0,5 Ma.
Przedstawiając nowoczesne BSP nie można zapomnieć o miniaturowych statkach pwietrznych. Siły zbrojne USA doceniły znaczenie miniaturowych BSP i już w 1998 roku Naval Research Laboratory oraz DARPA (program finansowany przez wojsko, p
0 m; masa całko-
Kolejnym przykładem BSP jest Petit Duc. Współdziałająca od kilku lat z brytyjską BAe wymieniająca z nią doświadczenia nad obiektami bezzałogowymi francuska firma Das-
sault Aviation, już 18 lipca 2001 roku przeprowadziła pierwszy udany (10-cio minutowy) lot własnego demonstratora BSP. Bezzpilotowiec ten określany jako Petit-Duc (Mały Książę) jest nie tylko wyjściową konstrukcją do opracowania w przyszłości całej rodziny, ale stanowi także obiekt niezwykle zaawansowany pod względem zastosowanej w nim
ologii stealth, o czym dobitnie świadczyć może jego skuteczna powierzchnia odbicia porównywalna z małym ptakiem. Pod względem kształtu płatowca, Petit-Duc jest pojaz-dem zupełnie unikalnym. Trójkątne skrzydła gładko przechodzą w mający identyczny
ub, zaopatrzony w tylnej części w dwa lekko ukośne stateczniki pionowe.
masa całkowita – 60
można zapomnieć o miniaturowych statkach po-wietrznych. Siły zbrojne USA doceniły znaczenie miniaturowych BSP i już w 1998 ro-ku Naval Research Laboratory oraz DARPA (program finansowany przez wojsko, po-

wołany do prowadzenia pracy nad różnymi typami BSP) zaczący miniaturowego BSP przeznaczonego do obserwacji, rekonesansu iterenu z bardzo małej wysokości oraz jeśli to będzie możliwe, do wykonywania zakłceń elektromagnetycznych. W ramach powyższego programu opracowywany zmodel miniaturowego BSP o nazwie MICROSTAR.
Rys. 10. Widok ogólny i budowa
Dane techniczne Mikrostar:86 g; zasięg - 5 km;czas lotu – 20 min.
Program DARPA obejmuje również pracę nad dwoma innymi typami miniaturowych bezzałogowych statków powietrznych: BLACK WIDOW i miniaturowym śmigłowcem HYPERAV.
Rys. 11. Black Widow
Dane techniczne Black Widow:ta/wyposażenia – czas lotu – 30 min.
5. Plany futurologiczneWedług opinii fachowców, w przyszłości bezzałogowe samoloty rozpoznawcze powinny stanowić niezwykle ważny
25
wołany do prowadzenia pracy nad różnymi typami BSP) zainicjowały program dotczący miniaturowego BSP przeznaczonego do obserwacji, rekonesansu iterenu z bardzo małej wysokości oraz jeśli to będzie możliwe, do wykonywania zakłceń elektromagnetycznych. W ramach powyższego programu opracowywany zmodel miniaturowego BSP o nazwie MICROSTAR.
Widok ogólny i budowa BSP Microstar
Dane techniczne Mikrostar: rozpiętość – 15 cm; długość – 15 cm; masa całkowita 5 km; prędkość max - 15 km/h; waga wyposażenia – 18 g; pułap
.
Program DARPA obejmuje również pracę nad dwoma innymi typami miniaturowych bezzałogowych statków powietrznych: BLACK WIDOW i miniaturowym śmigłowcem
Rys. 11. Black Widow
Dane techniczne Black Widow: rozpiętość/długość – 15 cm/15 cm; 42 g/2,2 g; zasięg/pułap – 1,8 km/235 m; prędkość max .
Plany futurologiczne Według opinii fachowców, w przyszłości bezzałogowe samoloty rozpoznawcze powinny stanowić niezwykle ważny element walki informacyjnej. Co roku na całym świecie powst
inicjowały program doty-czący miniaturowego BSP przeznaczonego do obserwacji, rekonesansu i rozpoznawania terenu z bardzo małej wysokości oraz jeśli to będzie możliwe, do wykonywania zakłó-ceń elektromagnetycznych. W ramach powyższego programu opracowywany został
masa całkowita – 18 g; pułap – 150 m;
Program DARPA obejmuje również pracę nad dwoma innymi typami miniaturowych bezzałogowych statków powietrznych: BLACK WIDOW i miniaturowym śmigłowcem
15 cm; masa całkowi-prędkość max – 20 km/h;
Według opinii fachowców, w przyszłości bezzałogowe samoloty rozpoznawcze powinny element walki informacyjnej. Co roku na całym świecie powsta-

26
ją coraz nowsze tego typu konstrukcje. W Stanach Zjednoczonych już tylko kwestią kilku lat jest całkowite wycofanie ciągle modernizowanego Lockheed U-2 Dragon Lady, który po-dzieli los wycofanego ostatecznie w 1998 roku słynnego Lockheed SR-71 Blackbird. Na razie na miejsce "doświadczonego" U-2, szykowane są systemy: Predator i Global Hawk, których zadaniem będzie nie tylko dostarczanie informacji określanych jako szpiegowskie, ale przede wszystkim zagwarantowanie bieżących obrazów i danych z pola walki. Informa-cje te, mają być przekazywane za pośrednictwem GPS do naziemnych ośrodków dowodze-nia oraz na pokład samolotów bojowych, umożliwiając im tym samym natychmiastowe likwidowanie zagrożeń, jak np. wykrytych rakietowych ośrodków obrony powietrznej prze-ciwnika. Powstało kilkadziesiąt futurologicznych koncepcji BSP, które można podzielić na cztery klasy.
• Duże bojowe statki powietrzne, które będą miały na celu zastąpić załogowe samo-loty bombowe. Ich konstrukcja będzie umożliwiała zabranie dużej ilości uzbrojenia i paliwa w celu wykonywania misji o dużych zasięgach.
• Małe bojowe statki powietrzne, które będą miały na celu zastąpić samoloty my-śliwskie. Mają być to samoloty tańsze w eksploatacji i które będą się charaktery-zowały lepszymi możliwościami manewrowymi.
• Małe bojowe statki powietrzne wystrzeliwanie z powietrza. Będą to wielozadanio-we pojazdy krótkiego zasięgu, przewożone w pobliże pola walki. Przeznaczenie ich będzie dość ściśle określone. Mogą służyć jako oświetlacze celów środki WRE oraz aktywne środki walki.
• Strategiczne statki powietrzne. Do klasy tej zaliczamy m.in. przedstawionego tutaj Global Hawk.
6. Podsumowanie Przyszłość BSP to nie tylko konflikty zbrojne i zastosowania militarne, ale również możli-wość wykorzystania ich w czasie pokoju i w warunkach cywilnych. Zastosowanie tego typu środków pozwoli do minimum ograniczyć narażanie życia przez ludzi oraz pozwoli zmniej-szyć koszty wielu przedsięwzięć. Cechą charakterystyczną przyszłościowych rozwiązań jest również to, iż aparaty te tworzone są na podstawie koncepcji opartych na doświadczeniach czerpanych z obserwacji owadów i ptaków. Takie rozwiązania planuje się zastosować m.in. w konstrukcji cybernetycznego nietoperza, unoszącego się dzięki ruchom skrzydeł. Do kolejnych możliwych rozwiązań należą też: entomoptery (aparaty oparte na mechanice lotu owada) oraz ornitoptery (bazujące na mechanice lotu ptaków).
Literatura 1. Stoch J., Bezzałogowe statki powietrzne. Cz. 1. Raport naukowy. WAT, Warszawa 2001.
2. Stoch J., Bezzałogowe statki powietrzne. Cz. 2. Raport naukowy. WAT, Warszawa 2001.
3. Czasopismo Żołnierz Polski.
4. Materiały internetowe poświęcone UAV.