Marcin Zelechowski

of 175
-
Upload
bilal-malik -
Category
Documents
-
view
229 -
download
3
Transcript of Marcin Zelechowski
-
8/22/2019 Marcin Zelechowski
1/175
Warsaw University of Technology
Faculty of Electrical EngineeringInstitute of Control and Industrial Electronics
Ph.D. Thesis
Marcin elechowski, M. Sc.
Space Vector Modulated Direct
Torque Controlled (DTC SVM)Inverter Fed Induction Motor Drive
Thesis supervisor
Prof. Dr Sc. Marian P. Kamierkowski
Warsaw Poland, 2005
-
8/22/2019 Marcin Zelechowski
2/175
-
8/22/2019 Marcin Zelechowski
3/175
Acknowledgements
The work presented in the thesis was carried out during authors Ph.D. studies at the
Institute of Control and Industrial Electronics in Warsaw University of Technology,
Faculty of Electrical Engineering. Some parts of the work were realized in cooperation
with foreign Universities:
University of Nevada, Reno, USA (US National Science Foundation grant Prof. Andrzej Trzynadlowski),
University of Aalborg, Denmark (Prof. Frede Blaabjerg),and company:
Power Electronics Manufacture TWERD, Toru, Poland.First of all, I would like to express gratitude Prof. Marian P. Kamierkowski for the
continuous support and help during work of the thesis. His precious advice and
numerous discussions enhanced my knowledge and scientific inspiration.
I am grateful to Prof. Andrzej Sikorski from the Biaystok Technical University and
Prof. Wodzimierz Koczara from the Warsaw University of Technology for their
interest in this work and holding the post of referee.
Specially, I am indebted to my friend Dr Pawe Grabowski for support and
assistance.
Furthermore, I thank my colleagues from the Intelligent Control Group in Power
Electronics for their support and friendly atmosphere. Specially, to Dr Dariusz Sobczuk,
Dr Mariusz Malinowski, Dr Mariusz Cichowlas, and Dariusz wierczyki M.Sc.
Finally, I would like thank to my whole family, particularly my parents for their love
and patience.
-
8/22/2019 Marcin Zelechowski
4/175
-
8/22/2019 Marcin Zelechowski
5/175
Contents
Pages
1. Introduction 12. Voltage Source Inverter Fed Induction Motor Drive 6
2.1. Introduction 62.2.Mathematical Model of Induction Motor 62.3.Voltage Source Inverter (VSI) 122.4.Pulse Width Modulation (PWM) 17
2.4.1. Introduction 172.4.2. Carrier Based PWM 182.4.3. Space Vector Modulation (SVM) 222.4.4. Relation Between Carrier Based and Space Vector Modulation 282.4.5. Overmodulation (OM) 312.4.6. Random Modulation Techniques 35
2.5.Summary 393. Vector Control Methods of Induction Motor 40
3.1. Introduction 403.2.Field Oriented Control (FOC) 403.3.Feedback Linearization Control (FLC) 453.4.Direct Flux and Torque Control (DTC) 49
3.4.1. Basics of Direct Flux and Torque Control 493.4.2. Classical Direct Torque Control (DTC) Circular Flux Path 533.4.3. Direct Self Control (DSC) Hexagon Flux Path 61
3.5.Summary 644. Direct Flux and Torque Control with Space Vector Modulation (DTC-SVM) 66
4.1. Introduction 664.2.Structures of DTC-SVM Review 66
4.2.1. DTC-SVM Scheme with Closed Loop Flux Control 664.2.2. DTC-SVM Scheme with Closed Loop Torque Control 684.2.3. DTC-SVM Scheme with Close Loop Torque and Flux Control
Operating in Polar Coordinates 69
4.2.4. DTC-SVM Scheme with Close Loop Torque and Flux Controlin Stator Flux Coordinates 70
4.2.5. Conclusions from Review of the DTC-SVM Structures 714.3.Analysis and Controller Design for DTC-SVM Method with
Close Loop Torque and Flux Control in Stator Flux Coordinates 71
4.3.1. Torque and Flux Controllers Design Symmetry Criterion Method 754.3.2. Torque and Flux Controllers Design Root Locus Method 784.3.3. Summary of Flux and Torque Controllers Design 88
4.4.Speed Controller Design 944.5.Summary 98
-
8/22/2019 Marcin Zelechowski
6/175
Contents
5. Estimation in Induction Motor Drives 995.1. Introduction 995.2.Estimation of Inverter Output Voltage 1005.3.Stator Flux Vector Estimators 1045.4.Torque Estimation 1105.5.Rotor Speed Estimation 1105.6.Summary 112
6. Configuration of the Developed IM Drive Based on DTC-SVM 1136.1. Introduction 1136.2.Block Scheme of Implemented Control System 1136.3.Laboratory Setup Based on DS1103 1156.4.Drive Based on TMS320LF2406 118
7. Experimental Results 1227.1. Introduction 1227.2.Pulse Width Modulation 1227.3.Flux and Torque Controllers 1257.4.DTC-SVM Control System 129
8. Summary and Conclusions 138References 141
List of Symbols 151
Appendices 156
A.1. Derivation of Fourier Series Formula for Phase Voltage
A.2. SABER Simulation Model
A.3. Data and Parameters of Induction Motors
A.4. Equipment
A.5. dSPACE DS1103 PPC Board
A.6. Processor TMS320FL2406
-
8/22/2019 Marcin Zelechowski
7/175
1. IntroductionThe Adjustable Speed Drives (ADS) are generally used in industry. In most drives
AC motors are applied. The standard in those drives are Induction Motors (IM) and
recently also Permanent Magnet Synchronous Motors (PMSM) are offered. Variable
speed drives are widely used in application such as pumps, fans, elevators, electrical
vehicles, heating, ventilation and air-conditioning (HVAC), robotics, wind generation
systems, ship propulsion, etc. [16].
Previously, DC machines were preferred for variable speed drives. However, DC
motors have disadvantages of higher cost, higher rotor inertia and maintenance problem
with commutators and brushes. In addition they cannot operate in dirty and explosive
environments. The AC motors do not have the disadvantages of DC machines.
Therefore, in last three decades the DC motors are progressively replaced by AC drives.
The responsible for those result are development of modern semiconductor devices,
especially power Insulated Gate Bipolar Transistor (IGBT) and Digital Signal Processor
(DSP) technologies.
The most economical IM speed control methods are realized by using frequency
converters. Many different topologies of frequency converters are proposed and
investigated in a literature. However, a converter consisting of a diode rectifier, a dc-
link and a Pulse Width Modulated (PWM) voltage inverter is the most applied used in
industry (see section 2.3).
The high-performance frequency controlled PWM inverter fed IM drive should be
characterized by:
fast flux and torque response,
available maximum output torque in wide range of speed operation region, constant switching frequency, uni-polar voltage PWM, low flux and torque ripple, robustness for parameter variation, four-quadrant operation,
-
8/22/2019 Marcin Zelechowski
8/175
1. Introduction
2
These features depend on the applied control strategy. The main goal of the chosen
control method is to provide the best possible parameters of drive. Additionally, a very
important requirement regarding control method is simplicity (simple algorithm, simple
tuning and operation with small controller dimension leads to low price of final
product).
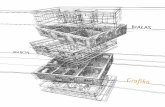
A general classification of the variable frequency IM control methods is presented in
Fig. 1.1 [67]. These methods can be divided into two groups:scalarand vector.
Variable
Frequency Control
Scalar based
controllers
Vector based
controller
U/f=const.
Volt/Hertz
( )rs fi = Field Oriented
Feedback
Linearization
Scalar based
controllers
Direct Torque
Control
Rotor Flux
Oriented
Stator Flux
Oriented
Direct Torque
Space - Vector
Modulation
Passivity Based
Control
Circle flux
trajectory
(Takahashi)
Hexagon flux
trajectory
(Takahashi)
Direct(Blaschke)
Indirect(Hasse)
Closed Loop
Flux & Torque
Control
Open LoopNFO (Jonsson)o&&
Stator Current
Fig. 1.1. General classification of induction motor control methods
The scalar control methods are simple to implement. The most popular in industry is
constant Voltage/Frequency (V/Hz=const.) control. This is the simplest, which does not
provide a high-performance. The vector control group allows not only control of the
voltage amplitude and frequency, like in the scalar control methods, but also the
instantaneous position of the voltage, current and flux vectors. This improves
significantly the dynamic behavior of the drive.
However, induction motor has a nonlinear structure and a coupling exists in the
motor, between flux and the produced electromagnetic torque. Therefore, several
methods for decoupling torque and flux have been proposed. These algorithms are
based on different ideas and analysis.
-
8/22/2019 Marcin Zelechowski
9/175
1. Introduction
3
The first vector control method of induction motor was Field Oriented Control
(FOC) presented by K. Hasse (Indirect FOC) [45] and F. Blaschke (Direct FOC) [12] in
early of 70s. Those methods were investigated and discussed by many researchers and
have now become an industry standard. In this method the motor equations are
transformed into a coordinate system that rotates in synchronism with the rotor flux
vector. The FOC method guarantees flux and torque decoupling. However, the
induction motor equations are still nonlinear fully decoupled only for constant flux
operation.
An other method known asFeedback Linearization Control(FLC) introduces a new
nonlinear transformation of the IM state variables, so that in the new coordinates, the
speed and rotor flux amplitude are decoupled by feedback [81, 83].
A method based on the variation theory and energy shaping has been investigated
recently, and is called Passivity Based Control (PBC) [88]. In this case the induction
motor is described in terms of the Euler-Lagrange equations expressed in generalized
coordinates.
In the middle of 80s new strategies for the torque control of induction motor was
presented by I. Takahashi and T. Noguchi asDirect Torque Control(DTC) [97] and by
M. Depenbrock asDirect Self Control(DSC) [4, 31, 32]. Those methods thanks to the
other approach to control of IM have become alternatives for the classical vector control
FOC. The authors of the new control strategies proposed to replace motor decoupling
and linearization via coordinate transformation, like in FOC, by hysteresis controllers,
which corresponds very well to on-offoperation of the inverter semiconductor power
devices. These methods are referred to as classical DTC. Since 1985 they have been
continuously developed and improved by many researchers.
Simple structure and very good dynamic behavior are main features of DTC.
However, classical DTC has several disadvantages, from which most important is
variable switching frequency.
Recently, from the classical DTC methods a new control techniques called Direct
Torque Control Space Vector Modulated(DTC-SVM) has been developed.
In this new method disadvantages of the classical DTC are eliminated. Basically, the
DTC-SVM strategies are the methods, which operates with constant switching
frequency. These methods are the main subject of this thesis. The DTC-SVM structures
-
8/22/2019 Marcin Zelechowski
10/175
1. Introduction
4
are based on the same fundamentals and analysis of the drive as classical DTC.
However, from the formal considerations these methods can also be viewed as stator
field oriented control (SFOC), as shown in Fig. 1.1.
Presented DTC-SVM technique has also simple structure and provide dynamic
behavior comparable with classical DTC. However, DTC-SVM method is characterized
by much better parameters in steady state operation.
Therefore, the following thesis can be formulated: The most convenient industrial
control scheme for voltage source inverter-fed induction motor drives is direct
torque control with space vector modulation DTC-SVM
In order to prove the above thesis the author used an analytical and simulation based
approach, as well as experimental verification on the laboratory setup with 5 kVA and
18 kVA IGBT inverters with 3 kW and 15 kW induction motors, respectively.
Moreover, the control algorithm DTC-SVM has been introduced used in a serial
commercial product of Polish manufacture TWERD, Toru.
In the authors opinion the following parts of the thesis are his original achievements:
elaboration and experimental verification of flux and torque controller design forDTC-SVM induction motor drives,
development of a SABER - based simulation algorithm for control andinvestigation voltage source inverter-fed induction motors,
construction and practical verification of the experimental setups with 5 kVA and18 kVA IGBT inverters,
bringing into production and testing of developed DTC-SVM algorithm in Polishindustry.
The thesis consist of eight chapters. Chapter 1 is an introduction. In Chapter 2
mathematical model of IM, voltage source inverter construction and pulse width
modulation techniques are presented. Chapter 3 describes basic vector control method
of IM and gives analysis of advantages and disadvantages for all methods. In this
chapter basic principles of direct torque control are also presented. Those basis are
common for classical DTC, which is presented in Chapter 3 and for DTC-SVM method.
Chapter 4 is devoted to analysis and synthesis of DTC-SVM control technique. The
flux, torque and speed controllers design are presented. In Chapter 5 the estimations
-
8/22/2019 Marcin Zelechowski
11/175
1. Introduction
5
algorithms are described and discussed. In Chapter 6 implemented DTC-SVM control
algorithm and used hardware setup are presented. In Chapter 7 experimental results are
presented and studied. Chapter 8 includes a conclusion. Description of the simulation
program and parameters of the equipment used are given in Appendixes.
-
8/22/2019 Marcin Zelechowski
12/175
2. Voltage Source Inverter Fed Induction Motor Drive2.1. Introduction
In this chapter the model of induction motor will be presented. This mathematical
description is based on space vector notation. In next part description of the voltage
source inverter is given. The inverter is controlled in Pulse Width Modulation fashion.
In last part of this chapter review of the modulation technique is presented.
2.2. Mathematical Model of Induction MotorWhen describing a three-phase IM by a system of equations [66] the following
simplifying assumptions are made:
the three-phase motor is symmetrical,
only the fundamental harmonic is considered, while the higher harmonics of the
spatial field distribution and of the magnetomotive force (MMF) in the air gap
are disregarded,
the spatially distributed stator and rotor windings are replaced by a specially
formed, so-called concentrated coil,
the effects of anisotropy, magnetic saturation, iron losses and eddy currents are
neglected,
the coil resistances and reactance are taken to be constant,
in many cases, especially when considering steady state, the current and voltages
are taken to be sinusoidal.
Taking into consideration the above stated assumptions the following equations of
the instantaneous stator phase voltage values can be written:
dt
dRIU AsAA += (2.1a)
dt
dRIU BsBB += (2.1b)
-
8/22/2019 Marcin Zelechowski
13/175
2.2. Mathematical Model of Induction Motor
7
dt
dRIU CsCC += (2.1c)
The space vector method is generally used to describe the model of the induction
motor. The advantages of this method are as follows:
reduction of the number of dynamic equations,
possibility of analysis at any supply voltage waveform,
the equations can be represented in various rectangular coordinate systems.
A three-phase symmetric system represented in a neutral coordinate system by phase
quantities, such as: voltages, currents or flux linkages, can be replaced by one resulting
space vector of, respectively, voltage, current and flux-linkage. A space vector isdefined as:
( ) ( ) ( )[ ]tktktk CBA ++= 2aa1k3
2(2.2)
where: ( ) ( ) ( )tktktk CBA ,, arbitrary phase quantities in a system of natural
coordinates, satisfying the condition ( ) ( ) ( ) 0=++ tktktk CBA ,
1, a, a
2
complex unit vectors, with a phase shift
2/3 normalization factor.
Im
)(2 tka C
)(takB
)(tkA
Re
k
k2
3
A
C
a
2a
1
Fig. 2.1. Construction of space vector according to the definition (2.2)
-
8/22/2019 Marcin Zelechowski
14/175
2. Voltage Source Inverter Fed Induction Motor Drive
8
An example of the space vector construction is shown in Fig. 2.1.
Using the space vector method the IM model equation can be written as:
dt
dRs
sss
IU += (2.3a)
dt
dRr
rrr
IU += (2.3b)
rss IImj
s MeL+= (2.4a)
srr IImj
r MeL+= (2.4b)
These are the voltage equations (2.3) and flux-current equations (2.4).
To obtain a complete set of electric motor equations it is necessary to, firstly,
transform the equations (2.3, 2.4) into a common rotating coordinate system and
secondly bring the rotor value into the stator side and thirdly. These equations are
written in the coordinate systemKrotating with the angular speed K .
KKK
KsK dt
dR s
sss
IU j (2.5a)
( ) KmbKKKrK pdt
dR rr
rr j
IU (2.5b)
KMKsK LL rss II + (2.6a)KMKrK LL srr II + (2.6b)
The equation of the dynamic rotor rotation can be expressed as:
[ ]mLem
B
MMJdt
d
=
1
(2.7)
where: eM electromagnetic torque,
LM load torque,
B viscous constant.
In further consideration the friction factor will be negated ( )0=B .
The electromagnetic torque eM can be expressed by the following formulas:
-
8/22/2019 Marcin Zelechowski
15/175
2.2. Mathematical Model of Induction Motor
9
( )rs II*Im2
Ms
be Lm
pM = (2.8)
( )ss I
*Im2
sbe
mpM = (2.9)
Taking into consideration the fact that in the cage motor the rotor voltage equals zero
and the electromagnetic torque equation (2.9) a complete set of equations for the cage
induction motor can be written as:
KKK
KsK dt
dR s
sss
IU j (2.10a)
( ) KmbKKKr pdt
dR r
rr
I j0 (2.10b)
KMKsK LL rss II + (2.11a)KMKrK LL srr II + (2.11b)( ) Lsbm MmpJdtd ss I*Im21 (2.12)
Equations (2.10), (2.11) and (2.12) are the basis of further consideration.
The applied space vector method as a mathematical tool for the analysis of the
electric machines a complete set equations can be represented in various systems of
coordinates. One of them is the stationary coordinates system (fixed to the stator)
in this case angular speed of the reference frame is zero 0=K . The complex space
vector can be resolved into components and .
ssK UU jsU (2.13a)
ssK II j+=sI , rrK II jrI (2.13b)
ssK j+=s , rrK jr (2.13c)
In coordinate system the motor model equation can be written as:
dt
dIRU ssss
+=
(2.14a)
-
8/22/2019 Marcin Zelechowski
16/175
2. Voltage Source Inverter Fed Induction Motor Drive
10
dt
dIRU
s
sss
+= (2.14b)
rmbr
rr pdt
dIR ++=0 (2.14c)
rmb
r
rr pdt
dIR +=0 (2.14d)
rMsss ILIL += (2.15a)
rMsss ILIL += (2.15b)
sMrrr ILIL += (2.15c)
sMrrr ILIL += (2.15d)
( )
= Lssss
sb
m MIIm
pJdt
d
2
1(2.16)
The relations described above by the motor equations can be represented as a block
diagram. There is not just one block diagram of an induction motor. The lay-out
Construction of a block diagram will depend on the chosen coordinate system and input
signals. For instance, if it is assumed in the stationary coordinate system that theinput signal to the motor is the stator voltage, the equations (2.14-2.16) can be
transformed into:
ssss IRU
dt
d= (2.17a)
sss
sIRU
dt
d= (2.17b)
rmbrrr
pIRdt
d= (2.17c)
rmbrr
rpIR
dt
d+= (2.17d)
r
rs
Ms
s
s LL
L
LI =
1(2.18a)
r
rs
Ms
r
s LL
LL
I = 1 (2.18b)
-
8/22/2019 Marcin Zelechowski
17/175
2.2. Mathematical Model of Induction Motor
11
s
rs
Mr
r
r LL
L
LI =
1(2.18c)
s
rs
Mr
r
r LL
L
LI =
1(2.18d)
( )
= Lssss
sb
m MIIm
pJdt
d
2
1(2.19)
These equations can be represented in the block diagram as shown in Fig. 2.2.
s
m
bp
sI
rI
ssU
sRsR
sL1
rs
M
LL
L
rs
M
LL
L
rL
1rR
r
rRrL
1rI
sR
sL
1
rs
M
LL
L
rs
M
LL
L
r
sU
2
sb
mp
eM
LM
sI
J
1
Fig. 2.2. Block diagram of an induction motor in the stationary coordinate system
This representation of the induction motor is not good for use to design a control
structure, because the output signals flux, torque and speed depend on both inputs. Fromthe control point of view this system is complicated. That is the reason why there are a
-
8/22/2019 Marcin Zelechowski
18/175
2. Voltage Source Inverter Fed Induction Motor Drive
12
few methods proposed to decouple the flux and torque control. It is achieved, for
example, by the orientation of the coordinate system to the rotor or stator flux vectors.
Both control systems are described further in Chapter 3.
The equations (2.17), (2.18), (2.19) and the block diagram presented in the Fig. 2.2can be used to build a simulation model of the induction motor. It was used in a
simulation model, which is presented in Appendix A.2.
2.3. Voltage Source Inverter (VSI)The three-phase two level VSI consists of six active switches. The basic topology of
the inverter is shown in Fig. 2.3. The converter consists of the three legs with IGBTtransistors, or (in the case of high power) GTO thyristors and free-wheeling diodes. The
inverter is supplied by a voltage source composed of a diode rectifier with a C filter in
the dc-link. The capacitor C is typically large enough to obtain adequately low voltage
source impedance for the alternating current component in the dc-link.
D1
D2
D3
D4
D5
D6
C2
dcU
2dc
U
C
0
SB+
SB-
SA+
SA-
SC+
SC-
T1
T2
T5
T6
T3
T4
DC side
UABA B C
N
IA
IB
IC
UA
RA
LA
EA
UB
RB
LB
EB
UC
RC
LC
EC
AC side
IM
PWM Converter
Fig. 2.3. Topology of the voltage source inverter
-
8/22/2019 Marcin Zelechowski
19/175
2.3. Voltage Source Inverter (VSI)
13
The voltage source inverter (Fig. 2.3) makes it possible to connect each of the three
motor phase coils to a positive or negative voltage of the dc link. Fig. 2.4 explains the
fabrication of the output voltage waves in square-wave, or six-step, mode of operation.
The phase voltages are related to the dc-link center point 0 (see Fig. 2.3).
a)
0
UB0
t2
dcU2
1
dcU2
1
0
UA0
t2
1 2 3 4 5 6
dcU2
1
dcU2
1
0
UC0
t2
dcU
2
1
dcU2
1
dcU3
2
dcU3
2
0
UAB
t
2
dcU3
1
dcU31
dcU
dcU
dcU3
2
dcU3
2
0
UA
t2
dcU
3
1
dcU3
1
b)
c)
d)
e)
Fig. 2.4. The output voltage waveforms in six-step mode
The phase voltage of an inverter fed motor (Fig. 2.4e) can be expressed by Fourier
series as [16, 66]:
( ) ( ) ( )
=
=
==11
sinsin12
n
nm
n
dcA tnUtnn
UU
(2.20)
where:
dcU - dc supply voltage,
-
8/22/2019 Marcin Zelechowski
20/175
2. Voltage Source Inverter Fed Induction Motor Drive
14
( ) dcnm Un
U
2= - peak value of the n-th harmonic,n = 1+6k, k= 0, 1, 2,
Derivation of the formula (2.20) is presented in Appendix A.1.
a) b)
c) d)
e) f)
g) h)
U1(100)
A B C
Udc
U2
(110)
A B C
Udc
U3(010)
A B C
Udc
U4
(011)
A B C
Udc
U5(001)
A B C
Udc
U6
(101)
A B C
Udc
U0(000)
A B C
Udc
U7
(111)
A B C
Udc
Fig. 2.5. Switching states for the voltage source inverter
From the equation (2.20) the fundamental peak value is given as:
( ) dcm UU
21 = (2.21)
-
8/22/2019 Marcin Zelechowski
21/175
2.3. Voltage Source Inverter (VSI)
15
This value will be used to define the modulation index used in pulse width
modulation (PWM) methods (see section 2.4).
For the sake of the inverter structure, each inverter-leg can be represented as an ideal
switch. The equivalent inverter states are shown in Fig. 2.5.
There are eight possible positions of the switches in the inverter. These states
correspond to voltage vectors. Six of them (Fig. 2.5 a-f) are active vectors and the last
two (Fig. 2.5 g-h) are zero vectors. The output voltage represented by space vectors is
defined as:
=
==
7,00
6...13
2 3)1(
v
veU vjdcv
U (2.22)
The output voltage vectors are shown in Fig. 2.6.
U1
(100)
U2(110)U
3(010)
U4(011)
U5(001) U
6(101)
U7(111)
U0(000)
Im
Re
Fig. 2.6. Output voltage represented as space vectors
Any output voltage can in average be generated, of course limited by the value of the
dc voltage. In order to realize many different pulse width modulation methods are
proposed [13, 27, 30, 38, 46, 47, 51, 52, 105] in history. However, the general idea is
-
8/22/2019 Marcin Zelechowski
22/175
2. Voltage Source Inverter Fed Induction Motor Drive
16
based on a sequential switching of active and zero vectors. The modulation methods are
widely described in the next section.
Only one switch in an inverter-leg (Fig. 2.3) can be turned on at a time, to avoid a
short circuit in the dc-link. A delay time in the transistor switching signals must beinserted. During this delay time, the dead-time TD transistors cease to conduct. Two
control signals SA+, SA- for transistors T1, T2 with dead-time TD are presented in Fig.
2.7. The duration of dead-time depends of the used transistor. Most of them it takes 1-
3s.
t
t
Ts
TD
TD
SA-
SA+
Fig. 2.7. Dead-time effect in a PWM inverter
Although, this delay time guarantees safe operation of the inverter, it causes a serious
distortion in the output voltage. It results in a momentary loss of control, where the
output voltage deviates from the reference voltage. Since this is repeated for every
switching operation, it has significant influence on the control of the inverter. This is
known as the dead-time effect. This is important in applications like a sensorless direct
torque control of induction motor. These applications require feedback signals like:
stator flux, torque and mechanical speed. Typically the inverter output voltage is needed
to calculate it. Unfortunately, the output voltage is very difficult to measure and it
requires additional hardware. Because of that for calculation of feedback signals the
reference voltage is used. However, the relation between the output voltage and the
reference voltage is nonlinear due to the dead-time effect [8]. It is especially important
-
8/22/2019 Marcin Zelechowski
23/175
2.4. Pulse Width Modulation (PWM)
17
for the low speed range when voltage is very low. The dead-time may also cause
instability in the induction motor [52].
Therefore, for correct operation of control algorithm proper compensation of dead-
time is required. Many approaches are proposed to compensate of this effect [2, 3, 8, 29,54, 64, 76].
The dead-time compensation is directly connected with estimation of inverter output
voltage. Therefore, compensation algorithm, which is used in final control structure of
the inverter is presented in Chapter 5.
2.4. Pulse Width Modulation (PWM)2.4.1. Introduction
In the voltage source inverter conversion of dc power to three-phase ac power is
performed in the switched mode (Fig. 2.3). This mode consists in power semiconductors
switches are controlled in an on-off fashion. The actual power flow in each motor phase
is controlled by the duty cycle of the respective switches. To obtain a suitable duty
cycle for each switches technique pulse width modulation is used. Many different
modulation methods were proposed and development of it is still in progress [13, 27,
30, 38, 46, 47, 51, 52, 105].
The modulation method is an important part of the control structure. It should
provide features like:
wide range of linear operation,
low content of higher harmonics in voltage and current,
low frequency harmonics,
operation in overmodulation,
reduction of common mode voltage,
minimal number of switching to decrease switching losses in the power
components.
The development of modulation methods may improve converter parameters. In thecarrier based PWM methods theZero Sequence Signals (ZSS) [46] are added to extend
-
8/22/2019 Marcin Zelechowski
24/175
2. Voltage Source Inverter Fed Induction Motor Drive
18
the linear operation range (see section 2.4.2). The carrier based modulation methods
with ZSS correspond to space vector modulation. It will be widely presented in section
2.4.4.
All PWM methods have specific features. However, there is not just one PWMmethod which satisfies all requirements in the whole operating region. Therefore, in the
literature are proposed modulators, which contain from several modulation methods.
For example, adaptive space vector modulation [79], which provides the following
features:
full control range including overmodulation and six-step mode, achieved by the
use of three different modulation algorithms,
reduction of switching losses thanks to an instantaneous tracking peak value of
the phase current.
The content of the higher harmonics voltage (current) and electromagnetic
interference generated in the inverter fed drive depends on the modulation technique.
Therefore, PWM methods are investigated from this point of view. To reduce these
disadvantages several methods have been proposed. One of these methods is random
modulation (RPWM). The classical carrier based method or space vector modulation
method are named deterministic (DEPWM), because these methods work with constant
switching frequency. In opposite to the deterministic methods, the random modulation
methods work with variable frequency, or with randomly changed switching sequence
(see section 2.4.6).
2.4.2. Carrier Based PWMThe most widely used method of pulse width modulation are carrier based. This
method is also known as the sinusoidal (SPWM), triangulation, subharmonic, or
suboscillation method [16, 52]. Sinusoidal modulation is based on triangular carrier
signal as shown in Fig. 2.8. In this method three reference signals UAc, UBc, UCc are
compared with triangular carrier signal Ut, which is common to all three phases. In this
way the logical signals SA, SB, SC are generated, which define the switching instants of
the power transistors as is shown in Fig. 2.9.
-
8/22/2019 Marcin Zelechowski
25/175
2.4. Pulse Width Modulation (PWM)
19
Udc
A B C
N
Carrier
UAc
UBc
UCc
Ut
SA
SB
SC
Fig. 2.8. Block scheme of carrier based sinusoidal PWM
Ut
UAc
UBc
UCc
0
1
0
1
0
1
0
SB
SC
0
dcU32
dcU31
dcU32dcU310
dcU
dcU
0
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
2dcU
SA
AU
ABU
2dcU
Fig. 2.9. Basic waveforms of carrier based sinusoidal PWM
-
8/22/2019 Marcin Zelechowski
26/175
2. Voltage Source Inverter Fed Induction Motor Drive
20
The modulation index m is defined as:
)(tm
m
U
Um = (2.23)
where:
mU - peak value of the modulating wave,
)(tmU - peak value of the carrier wave.
The modulation index m can be varied between 0 and 1 to give a linear relation
between the reference and output wave. At m=1, the maximum value of fundamental
peak voltage is 2
dcU
, which is 78.55% of the peak voltage of the square wave (2.21).
The maximum value in the linear range can be increased to 90.7% of that of the
square wave by inserting the appropriate value of a triple harmonics to the modulating
wave. It is shown in Fig. 2.10, which presents the whole range characteristic of the
modulation methods [67]. This characteristic include also the overmodulation (OM)
region, which is widely described in section 2.4.5.
1
0.785 0.907 1
1.155 3.24 M
m
[ ]%1002
dc
A
UU
78.5
90.7
100
SPWM
SVPWM
or SPWM with ZSS OM
Six step
operation
Fig. 2.10. Output voltage of VSI versus modulation index for different PWM techniques
-
8/22/2019 Marcin Zelechowski
27/175
2.4. Pulse Width Modulation (PWM)
21
If the neutral point N on the AC side of the inverter is not connected with the DC
side midpoint 0 (Fig. 2.3), phase currents depend only on the voltage difference
between phases. Therefore, it is possible to insert an additional Zero Sequence Signal(ZSS) of the 3-th harmonic frequency, which does not produce phase voltage distortion
and without affecting load currents. A block scheme of the modulator based on the
additional ZSS is shown in Fig. 2.11 [46].
N
Udc
A B C
SA
SB
SC
Carrier
UtCalculation
of ZSS
UAc
UBc
UCc
UAc
*
UBc*
UCc
*
Fig. 2.11. Generalized PWM with additional Zero Sequence Signal (ZSS)
The type of the modulation method depends on the ZSS waveform. The most popular
PWM methods are shown in Fig. 2.12 where unity the triangular carrier waveform gain
is assumed and the signals are normalized to2
dcU . Therefore,2
dcU saturation limits
correspond to 1. In Fig. 2.12 only phase A modulation waveform is shown as the
modulation signals of phase B and C are identical waveforms with 120 phase shift.
The modulated methods illustrated in Fig. 2.12 can be separated into two groups:
continuous and discontinuous. In the continuous PWM (CPWM) methods, the
modulation waveform are always within the triangular peak boundaries and in every
carrier cycle triangle and modulation waveform intersections. Therefore, on and off
switchings occur. In the discontinuous PWM (DPWM) methods a modulation
waveform of a phase has a segment which is clamped to the positive or negative DC
-
8/22/2019 Marcin Zelechowski
28/175
2. Voltage Source Inverter Fed Induction Motor Drive
22
bus. In this segments some power converter switches do not switch. Discontinuous
modulation methods give lower (average 33%) switching losses. The modulation
method with triangular shape of ZSS with 1/4 peak value corresponds to space vector
modulation (SVPWM) with symmetrical placement of the zero vectors in a sampling
period. It will be widely describe in section 2.4.4. In Fig. 2.12 is also shown sinusoidal
PWM (SPWM) and third harmonic PWM (THIPWM) with sinusoidal ZSS with 1/4
peak value corresponding to a minimum of output current harmonics [63].
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time
SPWM THIPWM SVPWM
UA
UN0
UA0
UA
=UA0
UN0
UN0
UA
UA0
a) b) c)
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time
UN0UN0
UN0
UA0
UA0U
A0
UA
UA
UA
DPWM1 DPWM2 DPWM3d) e) f)
Fig. 2.12. Waveforms for PWM with added Zero Sequence Signal a) SPWM, b)THIPWM, c) SVPWM,
d) DPWM1, e) DPWM2, f) DPWM3
2.4.3. Space Vector Modulation (SVM)The space vector modulation techniques differ from the carrier based in that way,
there are no separate modulators used for each of the three phases. Instead of them, the
reference voltages are given by space voltage vector and the output voltages of the
inverter are considered as space vectors (2.22). There are eight possible output voltage
vectors, six active vectors U1 - U6, and two zero vectors U0, U7 (Fig. 2.13). The
reference voltage vector is realized by the sequential switching of active and zero
vectors.
In the Fig. 2.13 there are shown reference voltage vector Uc and eight voltage
vectors, which corresponds to the possible states of inverter. The six active vectors
-
8/22/2019 Marcin Zelechowski
29/175
2.4. Pulse Width Modulation (PWM)
23
divide a plane for the six sectors I - VI. In the each sector the reference voltage vector
Uc is obtained by switching on, for a proper time, two adjacent vectors. Presented in
Fig. 2.13 the reference vectorUc can be implemented by the switching vectors ofU1, U2
and zero vectors U0, U7.
I
II
III
IV
V
VI
U7(111)
U0(000) U
1(100)
U2
(110)U3(010)
U4(011)
U5(001) U
6(101)
U
c
(t1
/Ts)U
1
(t2/T s
)U 2
Fig. 2.13. Principle of the space vector modulation
The reference voltage vectorUc is sampled with the fixed clock frequency ss Tf 1= ,
and next a sampled value ( )sTcU is used for calculation of times t1, t2, t0 and t7. The
signal flow in space vector modulator is shown in Fig. 2.14.
Udc
Sector
selection
SA
SB
SC
Calculation
t1
t2
t0
t7
fs
Uc
A B C
N
Uc(Ts)
Fig. 2.14. Block scheme of the space vector modulator
-
8/22/2019 Marcin Zelechowski
30/175
2. Voltage Source Inverter Fed Induction Motor Drive
24
The times t1 and t2 are obtained from simple trigonometrical relationships and can be
expressed in the following equations:
( )
= 3sin32
1 sMTt (2.24a)
( )
sin32
2 sMTt = (2.24b)
WhereMis a modulation index, which for the space vector modulation is defined as:
dc
c
stepsix
c
U
U
U
UM
2)(1
==
(2.25)
where:
cU - vector magnitude, or phase peak value,
)(1 stepsixU - fundamental peak value ( )dcU2 of the square-phase voltagewave.
The modulation indexMvaries from 0 to 1 at the square-wave output. The length of
the Uc vector, which is possible to realize in the whole range of is equal to dcU3
3.
This is a radius of the circle inscribed of the hexagon in Fig. 2.13. At this condition the
modulation index is equal:
907.0
2
3
3
==
dc
dc
U
U
M
(2.26)
This means that 90.7% of the fundamental at the square wave can be obtained. It
extends the linear range of modulation in relation to 78.55% in the sinusoidal
modulation techniques (Fig. 2.10).
After calculation of t1 and t2 from equations (2.24) the residual sampling time is
reserved for zero vectors U0 and U7.
70217,0 )( ttttTt s +=+= (2.27)
-
8/22/2019 Marcin Zelechowski
31/175
2.4. Pulse Width Modulation (PWM)
25
The equations for t1 and t2 are identically for all space vector modulation methods.
The only difference between the other type of SVM is the placement of zero vectors at
the sampling time.
The basic SVM method is the modulation method with symmetrical spacing zero
vectors (SVPWM). In this method times t0 and t7are equal:
( ) 22170 ttTtt s == (2.28)
For the first sector switching sequence can be written as follows:
U0 U1 U2 U7 U2 U1 U0 (2.29)This vector switching sequence in the SVPWM method is shown in Fig. 2.15a. In
this case zero vectors are placed in the beginning and in the end of period U0, and in the
center of the period U7. In one sampling period all three phases are switched. To realize
the reference vector can also be used an other switching sequence, for example:
U0 U1 U2 U1 U0 (2.30)or
U1 U2 U7 U2 U1 (2.31)These sequences are shown in Fig. 2.15b and 2.15c respectively. In these cases only
two phases switch in one sampling time, and only one zero vector is used U0 (Fig.
2.15b) orU7 (Fig. 2.15c). This type of modulation is called discontinuous pulse width
modulation (DPWM).
1
0 1
0 0 1
1
01
001
1 1 1
1 1
1
111
11
1
Ts
U7
t0
t2/2
SA
SB
SC
U1
U2
U2
U1
t1/2t
1/2 t
2/2
0
0 0
0
00
0 1 1
0 1
0
01
0
Ts
U0
U1
U2
U1
U0
t2
t1/2 t
0/2t
0/2 t
1/2
SA
SB
SC
0
0 0
0 0 0
0
00
000
1 1 1
1 1
1
111
11
1
Ts
U0
U1
U2
U7
U7
U2
U1
U0
t0/4 t
1/2 t
2/2 t
0/4t
0/4 t
1/2 t
2/2 t
0/4
SA
SB
SC
a) b) c)
Fig. 2.15. Space vectors in the sampling period a) SVPWM, b), c) DPWM
The idea of discontinuous modulation is based on the assumption that one phase is
clamped by 60 to lower or upper of the dc bus voltage. It gives only one zero state per
sampling period (Fig. 2.15b, c). The discontinuous modulation provides 33% reduction
-
8/22/2019 Marcin Zelechowski
32/175
2. Voltage Source Inverter Fed Induction Motor Drive
26
of the effective switching frequency and switching losses. The discontinuous space
vector modulation techniques, like all the space vector methods, correspond to the
carrier based modulation method. It will be widely described in the next section.
DPWM4
U7(111)
U0(000) U
1(100)
U2(110)
U3(010)
U4(011)
U5(001)
U6(101)
t7= 0
t7= 0
t7= 0
t0= 0
t0= 0
t0= 0
DPWM1
U7(111)
U0(000) U1 (100)
U2(110)
U3(010)
U4(011)
U5(001)
U6(101)
t7= 0
t7= 0
t7= 0
t0= 0
t0= 0
t0= 0
t0= 0
t7= 0
t0= 0
t7= 0
t7= 0
t0= 0
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time
UN0
UA0
UA
DPWM2
U7(111)
U0(000) U
1(100)
U2(110)
U3(010)
U4(011)
U5(001)
U6(101)
t7= 0
t7= 0t
7= 0
t0= 0 t
0= 0
t0= 0
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time
UN0
UA0
UA
DPWM3
U7(111)
U0(000) U1 (100)
U2(110)
U3(010)
U4(011)
U5(001)
U6(101)
t7= 0
t7= 0
t7= 0
t0= 0
t0= 0
t0= 0
t0= 0
t7= 0
t0= 0
t7= 0
t7= 0
t0= 0
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time
UN0
UA0
UA
0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 0.02
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Time
UA
UA0
UN0
a)
b)
c)
d)
Fig. 2.16. The discontinuous space vector modulation
-
8/22/2019 Marcin Zelechowski
33/175
2.4. Pulse Width Modulation (PWM)
27
In the Fig. 2.16 there are shown several different kinds of space vector discontinues
modulation. It can be seen that the type of method depends on the moved do not switch
sectors. These sectors are adequately moved on 0, 30, 60, 90 and denoted as
DPWM1, DPWM2, DPWM3 and DPWM4. Fig. 2.16 also shows voltage waveforms for
each methods. For the carrier based methods with ZSS these waveforms are identical
(Fig. 2.12).
From the type of modulation it depends also harmonic content, what is presented in
Fig. 2.17 for the SVPWM and DPWM1 methods.
Fig. 2.17. The output line to line voltage harmonics content a) SVPWM, b) DPWM 1
In Fig. 2.17 harmonics of output line to line voltage are shown. The voltage
frequency domain representation is composed of the series discrete harmonics
components. These are clustered about multiplies of the switching frequency. In this
case the switching frequency was 5 kHz. Spectrum for every modulation methods is
different. In Fig. 2.17 the differences between SVPWM and DPWM1 modulation
method can be seen. However, characteristic feature for all methods, which work with
constant switching frequency is clustered higher harmonics round multiplies of the
switching frequency. These type of modulation methods are named deterministic PWM
(DEPWM). The modulation method influence also for current distortion, torque ripple
and acoustic noise emitted from the motor. Modulation techniques are still being
improved for reduction of these disadvantages. One of the proposed methods is a
random PWM (RPWM) (see section 2.4.6).
-
8/22/2019 Marcin Zelechowski
34/175
2. Voltage Source Inverter Fed Induction Motor Drive
28
2.4.4. Relation Between Carrier Based and Space Vector ModulationAll the carrier based methods have equivalent to the space vector modulation
methods. The type of carrier based method depends on the added ZSS, as shown in
section 2.4.2, and type of the space vector modulation depending on the time of zero
vectors t0 and t7.
A comparison of carrier based method with SVM is shown in Fig 2.18. There is
shown a carrier based modulation with triangular shape of ZSS with 1/4 peak value.
This method corresponds to the space vector modulation (SVPWM) with symmetrical
placement of zero vectors in sampling period. In Fig. 2.18b is presented discontinuous
method DPWM1 for carrier based and for SVM techniques.
In the carrier based methods three reference signals UAc*, UBc
*, UCc* are compared
with triangular carrier signal Ut, and in this way logical signals SA, SB, SC are generated.
In the space vector modulation duration time of active (t1, t2) and zero (t0, t7) vectors are
calculated, and from these times switching signals SA, SB, SC are obtained. The gate
pulses generated by both methods are identical.
The carrier based PWM methods are simple to implement in hardware. Through the
compare reference signals with triangular carrier signal it receives gate pulses.
However, a PWM inverter is generally controlled by a microprocessor/controller
nowadays. Thanks to the representation of command voltages as space vector, a
microprocessor using suitable equations can calculate duration time and realize
switching sequence easily.
It is possible to implement all carrier based modulation methods using the space
vector technique. The active vector times t1 and t2 equations are identically for all space
vector modulation methods. But every method demand suitable equation for the zero
vectors t0 and t7.
The eight voltage vectors U0 - U7 correspond to the possible states of the inverter
(Fig. 2.13). Each of these states can be composed by a different equivalent electrical
circuit. In Fig 2.19 the circuit for the vectorU1is presented.
-
8/22/2019 Marcin Zelechowski
35/175
2.4. Pulse Width Modulation (PWM)
29
0
0 0
0 0 0
0
00
000
0 1 1
0 1
0
011
01
0
Ts
U0
U1
U2
U1
U0
t2
t1/2 t
0/2t
0/2 t
1/2
SA
SB
SC
UAc
*
UBc
*
UCc
*
SA
SB
SC
b)
CarrirbasedPWM
SpacevectorPWM
UAc
*
0
0 0
0 0 0
0
00
000
1 1 1
1 1
1
111
11
1
Ts
U0
U1
U2
U7
U7
U2
U1
U0
t0/4 t
1/2 t
2/2 t
0/4t
0/4 t
1/2 t
2/2 t
0/4
UBc
*
UCc
*
SA
SB
SC
SA
SB
SC
a)
CarrirbasedPWM
SpacevectorPWM
Fig. 2.18. Comparison of carrier based PWM with space vector PWM a) SVPWM, b) DPWM1
UA
UB
UC
UN0
A
B C
N0
2dcU
2dc
U
UB0=U
C0
UA0
Fig. 2.19. Equivalent circuit of VSI for the U1 vector
-
8/22/2019 Marcin Zelechowski
36/175
2. Voltage Source Inverter Fed Induction Motor Drive
30
Taking into consideration the electrical circuit in Fig. 2.19 the voltage distribution
can be obtained. The voltages can be written as:
dcA UU
3
2= ; dcB UU
3
1= ; dcC UU
3
1= (2.32)
dcA0 UU2
1= ; dcB0 UU
2
1= ; dcC0 UU
2
1= (2.33)
dcANA0N0 UUUU6
1== (2.34)
This analysis may be repeated for all vectors provided to obtain voltages presented in
Table 2.1.
Table 2.1. The voltages for the eight converter output vectors
A0U B0U AU BU CUC0U N0U
0U
1U
2U
3U
4U
5U
6U
7U
dcU2
1dcU
2
1
dcU3
2dcU
3
1dcU
2
1
dcU3
1 dcU
6
1
dcU2
1dcU
3
2dcU
3
1dcU
2
1 dcU
6
1
dcU21dcU
21 dcU3
2dcU31dcU21 dcU3
1 dcU61
dcU2
1dcU
3
1
dcU2
1dcU
2
1 dcU
3
2
dcU3
1dcU
2
1dcU
3
1dcU
6
1
dcU2
1 dcU
2
1 dcU
3
2dcU
3
1dcU
2
1dcU
3
1 dcU
6
1
dcU2
1dcU
2
1 dcU
3
1dcU
3
1dcU
2
1dcU
3
2 dcU
6
1
dcU2
1 dcU
2
1 0 0 dcU
2
10dcU
2
1
dcU2
1dcU
2
10 0 dcU
2
10dcU
2
1
The average value for sampling time ofUNO voltage can be written as follows:
++= 7210
dc
s
N0 ttttU
TU
3
1
3
1
2
1for the sectors I, III, V (2.35)
and
++= 7120
dc
s
N0 ttttU
TU 3
1
3
1
2
1for the sectors II, IV, VI (2.36)
-
8/22/2019 Marcin Zelechowski
37/175
2.4. Pulse Width Modulation (PWM)
31
From the above equations and taking into consideration equations (2.24) and (2.27)
the zero vectors times for different kinds of modulation can be calculated.
Relations between carrier based and SVM methods are presented in Table 2.2. This
table presents also the zero vector (t0, t7) times equations for the most significant
modulation methods.
Table 2.2. Relation between carrier based and SVM methods
=
cos4
12
MT
t s0
( )
+= sin3cos2
12 M
T
ts
0
Calculation oft0
and t7
for sectors I, III, V
for sectors II, IV, VI
210s7 tttTt =
Waveform of the
ZSS (Fig. 2.13)
( )0=N0U
Modulation
method
SPWM
Sinusoidal with
1/4 amplitude
no signal
THIPWM
=
3cos
4
1cos
41
2M
Tt s0
+=
3cos
2
1sin3cos
21
2M
Tt s0
for sectors II, IV, VI
210s7 tttTt =
for sectors I, III, V
Triangular with
1/4 amplitude
Discontinuous
SVPWM
DPWM1
( ) 221s70 ttTtt ==
0=0t
21s7 ttTt =
0=7t
21s0 ttTt =
when ( )1263
+
-
8/22/2019 Marcin Zelechowski
38/175
2. Voltage Source Inverter Fed Induction Motor Drive
32
range between this point and six-step mode is called overmodulation. This part of the
modulation techniques is not so important in vector controlled drives methods for the
sake of big distortion current and torque. For example, the overmodulation can be
applied in drives working in open loop control mode to increase the value of inverter
output voltage.
The overmodulation has been widely discussed in the literature [16, 33, 55, 75, 89].
Some of methods are proposed as extensions of the carrier based modulation and others
as extensions of space vector modulation. In the carrier based methods overmodulation
algorithm is realized by increasing reference voltage beyond the amplitude of the
triangular carrier signal. In this case some switching cycles are omitted and each phase
is clamped to one of the dc busses.
The overmodulation region for space vector modulation is shown in Fig. 2.20. The
maximum length of vectorUc possible to realization in whole range of angle is equal
dcU3
3. It is a radius of the circle inscribed of the hexagon. This value corresponds to
the modulation index equal to 0.907 (see equation 2.26). To realize higher values a
voltage overmodulation algorithm has to be applied. At the end of the overmodulation
region is a six-step mode (atM= 1).
U7(111)
U0(000) U
1(100)
U2(110)U
3(010)
U4(011)
U5(001) U
6(101)
U
c
(t1 /Ts)U1
(t2/T
s)U
2 Overmodulation range
0.907
-
8/22/2019 Marcin Zelechowski
39/175
2.4. Pulse Width Modulation (PWM)
33
If the value of the reference voltage beyond maximal value in the linear range vector
Uc can not be realized for whole range of angle. However, average voltage value can
be obtained for modification of the reference voltage vector. Because of the modified
reference voltage vector overmodulation algorithms are not widely used in vector
control methods of drive. To modify the reference voltage vector different algorithm
may be applied. Overmodulation range can be considered as one region [33], or it can
be divided into two regions [16, 55, 75, 89].
In the algorithm where overmodulation region is considered as two regions two
modes depending on the reference voltage value were defined. In mode I the algorithm
modifies only the voltage vector amplitude, in mode II both the amplitude and angle of
the voltage vector.
Overmodulation mode I is shown in Fig. 2.21.
U0(000)
U7(111)
Uc
Uc*
U1 (100)
U2(110)U
3(010)
U4(011)
U5(001) U
6(101)
Fig. 2.21. Overmodulation mode I
In this mode voltage vectorUc crosses the hexagon boundary at two points in each
sector. There is a loss of fundamental voltage in the region where reference vector
exceeds the hexagon boundary. To compensate for this loss, the reference vector
amplitude is increased in the region where the reference vector is in hexagon boundary.
A modified reference voltage trajectory proceeds partly on the hexagon and partly on
the circle. This trajectory is shown in Fig. 2.21.
-
8/22/2019 Marcin Zelechowski
40/175
2. Voltage Source Inverter Fed Induction Motor Drive
34
In the hexagon trajectory part only active vectors are used. The duration of these
vectors t1 and t2 are obtained from trigonometrical relationships and can be expressed in
the following equations:
sincos3
sincos3
+= s1 Tt (2.37a)
1s2 tTt = (2.37b)
0== 70 tt (2.37c)
The output voltage waveform is given approximately by linear segments for the
hexagon trajectory and sinusoidal segments for the circular trajectory. Boundary of the
segments is determined by a crossover angle which depends on the reference voltage
value. As known from Fig. 2.21 the upper limit in mode I is when = 0. Then the
voltage trajectory is fully on the hexagon. The fundamental peak value generated in this
way voltage is 95% of the peak voltage of the square wave [75]. It gives modulation
index M= 0.952.
For the modulation index higher then 0.952 the overmodulation mode II is applied.
The overmodulation mode II is shown in Fig. 2.22. In this mode not only the reference
vector amplitude is modified but also an angle. The reference angle from to * is
changed.
U0(000)
U7(111)
Uc
Uc*
U1(100)
U2(110)U
3(010)
U4(011)
U5(001) U
6(101)
h
h
Fig. 2.22. Overmodulation mode II where both amplitude and angle is changed
-
8/22/2019 Marcin Zelechowski
41/175
2.4. Pulse Width Modulation (PWM)
35
The trajectory ofUc* is maintained on the hexagon which defines amplitude of the
reference voltage vector. The angle is calculated from the following equations:
-
8/22/2019 Marcin Zelechowski
42/175
2. Voltage Source Inverter Fed Induction Motor Drive
36
cycles the switching sequence is deterministic. In RPWM methods the switching
frequency or the switching sequence change randomly.
One of the proposed random modulation techniques is a method with randomly
varied lengths of coincident switching and sampling time of the modulator. This method
was named RPWM 1. The sampling and switching cycles in DEPWM with RPWM 1 is
comparable shown in Fig. 2.23. The reference voltage vectors Uc, which are calculated
in one sampling time Ts and realized in the next switching time Tsw are shown. In drive
systems the controller mostly operates in synchronism with modulator and in RPWM 1
arises problems in the control system, when it works with variable sampling frequency.
An additional control algorithm with variable sampling frequency is difficult tin a
digital implementation.
1 2 3 ... n-1 n ...sampling cycles
switching cycles 1 2 3 ... n-1 n ...
)1(
cU)2(
cU)3(
cU)(K
cU)1( n
cU)1( +n
cU)(n
cU
sampling cycles
switching cycles ...1 2 ... n-1 n
...1 2 ... n-1 n
3
3
)1(
cU)2(
cU)3(
cU)(K
cU)1( n
cU)1( +n
cU)(n
cU
a)
b)
sws TT =
sws TT =
Fig. 2.23. Sampling and switching cycles a) DEPWM, b) RPWM 1
For elimination of these disadvantages random modulation techniques were
proposed, which operate with a fixed switching and sampling frequency. These methods
randomly change switching sequence in the interval. Three of these methods are shown
in Fig. 2.24 [6].
First of them (Fig. 2.24a) is random lead-lag modulation (RLL). In this method pulse
position is either commencing at the beginning of the switching interval (leading-edge
-
8/22/2019 Marcin Zelechowski
43/175
2.4. Pulse Width Modulation (PWM)
37
modulation) or its tailing edge is aligned with the end of the interval (lagging-edge
modulation). A random number generator controls the choice between leading and
legging edge modulation.
In Fig. 2.24b is shown a random center pulse displacement (RCD) method. In this
technique pulses are generated identically as in the SVPWM method (Fig. 2.15), but
common pulse center is displaced by the amount sT from the middle of the period.
The parameter is varied randomly within a band limited by the maximum duty cycle.
The last presented method (Fig. 2.24c) is random distribution of the zero voltage
vector (RZD). Additionally distribution of the zero vectors can by different, until only
one zero vector in switching cycle in the discontinuous methods (Fig. 2.15b, c). This
fact is utilized in the random distribution of the zero voltage vector, where the
proportion between the time duration for the two zero vectors U0(000) and U7(111) is
randomized in the switching cycles.
SA
SB
SC
Ts
Ts
Ts
Ts
sT sT sT sT
SA
SB
SC
Ts
Ts
Ts
Ts
Lead Lag Lag Lead
SA
SB
SC
Ts
Ts
Ts
Ts
a)
b)
c)
Fig. 2.24. Different fixed switching random modulation schemes a) Random lead-leg modulation (RLL),
b) Random center displacement (RCD), c) Random zero vector distribution (RZD)
-
8/22/2019 Marcin Zelechowski
44/175
2. Voltage Source Inverter Fed Induction Motor Drive
38
The main disadvantage of the RPWM 1 method (Fig. 2.23b) is variable switching
frequency. For elimination of this disadvantage RPWM 2 [119] was proposed, which
operates with fixed sampling frequency and variable switching frequency. The principle
of this method is shown in Fig. 2.25.
1 2 3 ... n-1 n ...
...1 2 3 ... n-1 n
sampling cycles
switching cycles
)1(
cU)2(
cU)3(
cU)(K
cU)1( n
cU)1( +n
cU)(n
cU
swT
sT
t
Fig. 2.25. Sampling and switching cycles in RPWM 2 technique
In this method the start of each switching cycles is delayed with respect to that of the
coincident sampling cycle by a random varied time interval t . It is given as:
srTt= (2.39)
where rdenotes a random number between 0 and 1. Time interval t is limited for
the sake of minimum switching time of inverter.
Fig. 2.26. The output line to line voltage harmonics content a) RPWM 1, b) RPWM 2
Corresponding spectra for the RPWM 1 and RPWM 2 techniques are shown in Fig.
2.26a and 2.26b respectively. It can be seen that the harmonic clusters typical for the
determination modulation (compared to Fig. 2.17) are practically eliminated by the
-
8/22/2019 Marcin Zelechowski
45/175
2.5. Summary
39
random modulation techniques. Simulation result presented in both figures (Fig. 2.17
and Fig. 2.26) was done at the same conditions: sampling frequency 5 kHz, output
frequency 50 Hz.
2.5. SummaryIn this chapter mathematical description of IM based on complex space vectors was
presented. The complete equations set is the basis of further consideration of control
and estimation methods.
The structure of two levels voltage source inverter was presented. The main features
and voltage forming methods were described. For the sake of dead-time and voltagedrop on the semiconductor devices the inverter has nonlinear characteristic. Therefore,
in control scheme compensation algorithms are needed.
The inverter is controlled by pulse width modulation (PWM) technique. The
modulation methods are divided into two groups: triangular carrier based and space
vector modulation. Between those two groups there are simple relations. All the carrier
based methods have equivalent to the space vector modulation methods. The type of
carrier based method depends on the added ZSS and type of the space vector
modulation depends on the placement of zero vectors in the sampling period. Presented
modulation methods will be used in the final drive.
This chapter contains compete review of the modulation techniques, including some
random modulation methods. Those methods have very interesting advantages and can
be implemented in special application of IM drives. Currently they have not been
implemented in a presented serially produced drive. However, it will be offered as an
option in a near future. Some experimental results for the implemented modulation
methods are shown in Chapter 7.
-
8/22/2019 Marcin Zelechowski
46/175
3. Vector Control Methods of Induction Motor3.1. Introduction
In this chapter review of the most significant IM vector control method is presented.
According to the classification presented in Chapter 1. The theoretical basis and short
characteristic for all methods are given. The direct torque control (DTC) method creates
a base for further analyze of DTC-SVM algorithms. Therefore, DTC is more detailed
discussed (see section 3.4).
3.2. Field Oriented Control (FOC)The principle of the field oriented control (FOC) is based on an analogy to the
separately excited dc motor. In this motor flux and torque can be controlled
independently. The control algorithm can be implemented using simple regulators, e.g.
PI-regulators.
In induction motor independent control of flux and torque is possible in the case of
coordinate system is connected with rotor flux vector. A coordinate system qd is
rotating with the angular speed equal to rotor flux vector angular speed srK = ,
which is defined as follows:
dt
d srsr = (3.1)
The rotating coordinate system qd is shown in Fig. 3.1.
The voltage, current and flux complex space vector can be resolved into components
dand q.
sqsdK UU j+=sU (3.2a)
sqsdK II j+=sI , rqrdK II j+=rI (3.2b)
sqsdK j+=s , rrdK ==r (3.2c)
-
8/22/2019 Marcin Zelechowski
47/175
3.2. Field Oriented Control (FOC)
41
r
d
q sI
sI
sI
sdIsqI
sr
sr
Fig. 3.1. Vector diagram of induction motor in stationary and rotating qd coordinates
In qd coordinate system the induction motor model equations (2.10-2.12) can be
written as follows:
sqsrsd
sdssd dt
dIRU += (3.3a)
sdsr
sq
sqssq dt
dIRU ++= (3.3b)
dt
dIR rrdr +=0 (3.3c)
( )mbsrrrqr pIR +=0 (3.3d)
rdMsdssd
ILIL += (3.4a)
rqMsqssq ILIL += (3.4b)
sdMrdrr ILIL += (3.4c)
sqMrqr ILIL +=0 (3.4d)
= Lsqr
r
Msb
m MIL
Lmp
Jdt
d
2
1(3.5)
The equations 3.3c and 3.4c can be easy transformed to:
-
8/22/2019 Marcin Zelechowski
48/175
3. Vector Control Methods of Induction Motor
42
r
r
rsd
r
rMr L
RI
L
RL
dt
d= (3.6)
The motor torque can by expressed by rotor flux magnitude r and stator current
component sqI as follows:
sqr
r
Msbe I
L
LmpM
2= (3.7)
Equations (3.6) and (3.7) are used to construct a block diagram of the induction
motor in qd coordinate system, which is presented in Fig. 3.2.
r
m
2
s
b
m
p
eM
LM
J
1
r
rM
L
RL
r
r
L
R
r
M
L
L
sdI
sqI
eM
Fig. 3.2. Block diagram of induction motor in qd coordinate system
The main feature of the field oriented control (FOC) method is the coordinate
transformation. The current vector is measured in stationary coordinate .
Therefore, current components sI , sI must be transformed to the rotating system
qd . Similarly, the reference stator voltage vector components csU , csU , must be
transformed from the system qd to . These transformations requires a rotor
flux angle sr . Depending on calculations of this angle two different kind of field
oriented control methods maybe considered. Those are Direct Field Oriented Control
(DFOC) andIndirect Field Oriented Control(IFOC) methods.
-
8/22/2019 Marcin Zelechowski
49/175
3.2. Field Oriented Control (FOC)
43
For DFOC an estimator or observer calculates the rotor flux angle sr . Inputs to the
estimator or observer are stator voltages and currents. An example of the DFOC system
is presented in Fig. 3.3.
PI
SVM
SA
SB
SCsq c
I
FluxEstimator
Udc
sU
sU
sI
csU
csU
sI
sI
sr
rc
ecM
sdI
sqI
sd cI
PI
qd
qd
3
2
Motor
rcM
r
sb L
L
mp
12
ML
1
VoltageCalculation
Fig. 3.3. Block diagram of the Direct Field Oriented Control (DFOC)
For the IFOC rotor flux angle sr is obtained from reference sdcI , sqcI currents. The
angular speed of the rotor flux vector speed can be calculated as follows:
mbslrs p += (3.8)
where sl is a slip angular speed. It can be calculated from (3.3d) and (3.4d).
sqc
r
r
sdc
sl IL
R
I
1= (3.9)
In Fig. 3.4 a block diagram of the IFOC is shown.
-
8/22/2019 Marcin Zelechowski
50/175
3. Vector Control Methods of Induction Motor
44
PI
SVM
SA
SB
SCsq c
I
Udc
sI
csU
csU
sI
sI
sr
rc
ecM
sdI
sqI
sdcI
PI
qd
qd
Motor
rcM
r
sb L
L
mp
12
ML
1
3
2
msr
sl
sdcr
r
IL
R 1
bp
Fig. 3.4. Block diagram of the Indirect Field Oriented Control (IFOC)
In both presented examples reference currents in rotating coordinate system sdcI , sqcI
are calculated from the reference flux and torque values. Taking into consideration the
equations describing IM in field oriented coordinate system (3.6) and (3.7) at steady
state the formulas for the reference currents can be written as follows:
r
M
sdc L
I1
= (3.10)
ec
rcM
r
sb
sqc ML
L
mpI
12= (3.11)
The property of the FOC methods can be summarized as follows:
the method is based on the analogy to control of a DC motor, FOC method does not guarantee an exact decoupling of the torque and flux
control in dynamic and steady state operation,
relationship between regulated value and control variables is linear only forconstant rotor flux amplitude,
-
8/22/2019 Marcin Zelechowski
51/175
3.3. Feedback Linearization Control (FLC)
45
full information about motor state variable and load torque is required (themethod is very sensitive to rotor time constant),
current controllers are required, coordinate transformations are required, a PWM algorithm is required (it guarantees constant switching frequency), in the DFOC rotor flux estimator is required, in the IFOC mechanical speed is required, the stator currents are sinusoidal except of high frequency switching harmonics.
3.3. Feedback Linearization Control (FLC)The transformation of the induction motor equations in the field coordinates has a
good physical basis because it corresponds to the decoupled torque production in a
separately excited DC motor. However, from the theoretical point of view, other types
of coordinates can be selected to achieve decoupling and linearization of the induction
motor equations.
In [28] it is shown that a nonlinear dynamic model of IM can be considered as
equivalent to two third-order decoupled linear systems. In [70] a controller based on a
multiscalar motor model has been proposed. The new state variables have been chosen.
In result the motor speed is fully decoupled from the rotor flux. In [82] the authors
proposed a nonlinear transformation of the motor states variables, so that in the new
coordinates, the speed and rotor flux amplitude are decoupled by feedback. Others
proposed also modified methods based on Feedback Linearization Control like in [93,
94].
In the example given new quantities for control of rotor flux magnitude and
mechanical speed were chosen [93]. For this purpose the induction motor equations
(2.10-2.12) can be written in the following form:
gg)x(x ss UUf +& (3.12)where:
-
8/22/2019 Marcin Zelechowski
52/175
3. Vector Control Methods of Induction Motor
46
++
=
J
MII
Ip
Ip
ILp
ILp
f
Lsrsr
srrmb
srmbr
sMrrmb
sMrmbr
)(
)(
x (3.13)
T
g
= 00100 ,,,,sL
(3.14)
T
g
= 01000 ,,,,sL
(3.15)
[ ]Tx mssrr II ,,,, (3.16)
and
r
r
L
R= (3.17)
rs
M
LL
L
= (3.18)
2
22
rs
Mrrs
LL
LRLR
+= (3.19)
J
Lmp Msb
2= (3.20)
Because rrm ,, are not dependent on ss UU , it is possible to chose variable
dependent on x:
222
1 )x( rrr = (3.21)m)x(2 (3.22)
If it is assumed that )x(1 , )x(2 are output variables, the full definition of new
coordinates can be given by:
)x(11 z (3.23a)
)x(12 fLz = (3.23b)
-
8/22/2019 Marcin Zelechowski
53/175
3.3. Feedback Linearization Control (FLC)
47
)x(23 z (3.23c)
)x(24 fLz = (3.23d)
=
r
r
z arctan5 (3.23e)
It should be mentioned that the goal of the control is to obtain constant flux
amplitude and to follow the reference angular speed.
The fifth variable cannot be fully linearized. Additionally, it is not controllable (the
fifth variable correspond to slip in the motor). Therefore, the last equation is not
considered. Then the dynamics of the system are given by:
+
=
s
s
f
f
U
U
L
L
z
zD
2
2
1
2
3
1
&&
&&(3.24)
where
=
22
11
fgfg
fgfg
LLLL
LLLLD (3.25)
If 01
(the amplitude of flux is not zero) then 0D)
det( and it is possible todefine the linearization feedback as:
+
=
2
1
2
2
1
2
v
v
L
L
U
U
f
f
s
s
1-D (3.26)
Then the resulting system is described by the equations:
21 zz =& (3.27a)12 vz =& (3.27b)43 zz =& (3.27c)24 vz =& (3.27d)
and the final block diagram of the induction motor with the new defined control
signals can be shown as in Fig. 3.5.
-
8/22/2019 Marcin Zelechowski
54/175
3. Vector Control Methods of Induction Motor
48
m
LM
eM2
4z
J
r1
2z2
r
Fig. 3.5. Block diagram of the induction motor with new 1v and 2v control signals
The control signals 1v , 2v are calculated by using linear feedback as follows:
( ) 21211111 zkzzkv ref (3.28)( ) 42233212 zkzzkv ref (3.29)
where coefficients 11k , 12k , 21k , 22k are chosen to receive reference close loop
system dynamics.
An example of a FLC system for PWM inverter-fed induction motor is presented in
Fig. 3.6.
The property of the FLC can be summarized as follows:
it guarantees exactly decoupling of the motor speed and rotor flux control in bothdynamic and steady state,
the method is implemented in a state variable control fashion and needs complexsignal processing,
full information about motor state variables and load torque is required, there are no current controllers,
a PWM vector modulator is required, what further guarantee constant switchingfrequency,
-
8/22/2019 Marcin Zelechowski
55/175
3.4. Direct Flux and Torque Control (DTC)
49
the stator currents are sinusoidal except of high frequency switching harmonics.
Speed
Controller
FluxController Vector
Modulator
Control
Signals
Transfor-
mation
Feedback
Signals
Transfor-mation
1
2
sI
sI
r
r
Flux
Estimator
m
2
rc
5z
SA
SB
SC
Voltage
Calculation
mc
1z
2z
3z
4z
csU
Motor
sU
sI
csU
dcU
Fig. 3.6. Block scheme of the feedback linearization control method
3.4. Direct Flux and Torque Control (DTC)3.4.1. Basics of Direct Flux and Torque Control
As it was mentioned in section 3.2 in the classical vector control strategy (FOC) the
torque is controlled by the stator current component sqI in accordance with equation
(3.7). This equation can also be written as:
sin2
sr
r
Msbe I
L
LmpM = (3.30)
where:
- angle between rotor flux vector and stator current vector.
The formula (3.30) can be transformed into the equation:
rs
Msr
Msbe
LLL
LmpM sin
22
= (3.31)
where:
- angle between rotor and stator flux vectors.
-
8/22/2019 Marcin Zelechowski
56/175
3. Vector Control Methods of Induction Motor
50
It can be noticed that the torque depends on the stator and rotor flux magnitude as
well as the angle . The vector diagram of IM is presented in Fig. 3.7. The two angels
and are also shown in Fig. 3.7. The angle is important in FOC algorithms,
whereas in DTC techniques.
sI
s
r
ss
sr
Fig. 3.7. Vector diagram of induction motor
From the motor voltage equation (2.10a), for the omitted voltage drop on the stator
resistance, the stator flux can by expressed as:
s
s U
=dt
d(3.32)
Taking into consideration the output voltage of the inverter in the above equation it
can be written as:
=t
vdt0
Us (3.33)
where:
=
==
7,00
6...13
2 3)1(
v
veU vjdcv
U (3.34)
Equation (3.33) describe eight voltage vectors which correspond to possible inverter
states. These vectors are shown in Fig. 3.8. There are six active vectors U1-U6 and two
zero vectors U0, U7.
-
8/22/2019 Marcin Zelechowski
57/175
3.4. Direct Flux and Torque Control (DTC)
51
U1
(100)
U2
(110)U3(010)
U4(011)
U5(001) U
6(101)
Im
ReU7(111)
U0(000)
Fig. 3.8. Inverter output voltage represented as space vectors
It can be seen from (3.33), that the stator flux directly depends on the inverter voltage
(3.34).
By using one of the active voltage vectors the stator flux vector moves to the
direction and sense of the voltage vector. It can be observed by simulation of six-step
mode (Fig. 3.9) and PWM operation (Fig. 3.10). In Fig. 3.9 is well shown how stator
flux changes direction for the cycle sequence of the active voltage vectors. Obviously,
the same effect is for the PWM operation (Fig. 3.10). However, in this case the control
algorithm choose correct voltage vectors, thanks to that waveform is close to be
sinusoidal. In this simulation a low sampling frequency is used (0.5kHz) for better
presenting the effect. A zoom part of the flux vector trajectory is shown in Fig. 3.11.
In induction motor the rotor flux is slowly moving but the stator flux can be changed
immediately. In direct torque control methods the angle between stator and rotor flux
can be used as a variable of torque control (3.31). Moreover stator flux can be
adjusted by stator voltage in simple way. Therefore, angle as well as torque can be
changed thanks to the appropriate selection of voltage vector.
There are the general bases of the direct flux and torque control methods. Those
consideration and above equations can be used in analysis of the classical DTC
algorithms as well as in new proposed methods. It is also bases of the DTC-SVM
methods, which are presented in Chapter 4.
-
8/22/2019 Marcin Zelechowski
58/175
3. Vector Control Methods of Induction Motor
52
a)
b)
Fig. 3.9. IM under six-step mode a) voltage and stator flux waveforms, b) stator flux trajectory
a)
b)
Fig. 3.10. IM under PWM operation a) voltage and stator flux waveforms, b) stator flux trajectory
-
8/22/2019 Marcin Zelechowski
59/175
3.4. Direct Flux and Torque Control (DTC)
53
U1(100)
U2(110)U
3(010)
U4(011)
U5(001) U6(101)
U7(111)
U0(000)
voltage U3
applied
voltage U2applied
voltage U3
applied
voltage U3applied
voltage U4
applied
voltage U4
applied
voltage U3
applied
voltage U4applied
Fig. 3.11. Forming of the stator flux trajectory by appropriate voltage vectors selection
3.4.2. Classical Direct Torque Control (DTC) Circular Flux PathThe block diagram of classical DTC proposed by I. Takahashi and T. Nogouchi [97]
is presented in Fig. 3.12.
s
SA
SB
SC
Udc
Motor
Torque
Controller
Flux
Controller
sc d
Md
Voltage
Calculation
Vector
Selection
Table
(N)ss
Sector
Detection
Flux and
Torque
Estimator
Mec
Us
Is
eM s
s
Me
e
Fig. 3.12. Block scheme of the direct torque control method
-
8/22/2019 Marcin Zelechowski
60/175
3. Vector Control Methods of Induction Motor
54
The stator flux amplitude sc and the electromagnetic torque cM are the reference
signals which are compared with the estimated s and eM
values respectively. The
flux e and torque Me errors are delivered to the hysteresis controllers. The digitized
output variables d , Md and the stator flux position sector ( )Nss selects the
appropriate voltage vector from the switching table. Thus, the selection table generates
pulses SA, SB, SC to control the power switches in the inverter.
For the flux is defined two-level hysteresis controller, for the torque three-level, as it
is shown in Fig. 3.13.
a)
e
d
H
b)
M
d
Me
MH
Fig. 3.13. The hysteresis controllers a) two-level, b) three-level
The output signals d , Md are defined as:
1=d for He > (3.35a)
0=d for He < (3.35b)
1=Md for MM He > (3.36a)
0=Md for 0=Me (3.36b)
1=Md for MM He < (3.36c)
In the classical DTC method the plane is divided for the six sectors (Fig. 3.14),
which are defined as:
Sector 1:
+
6,
6
ss (3.37a)
Sector 2:
+
2,
6
ss (3.37b)
Sector 3:
++
65,
2ss (3.37c)
-
8/22/2019 Marcin Zelechowski
61/175
3.4. Direct Flux and Torque Control (DTC)
55
Sector 4:
+
6
5,
6
5 ss (3.37d)
Sector 5:
2
,
6
5 ss (3.37e)
Sector 6:
6,
2
ss (3.37f)
U7(111)
U0(000) U1 (100)
U2(110)
U3(010)
U4(011)
U5(001)
U6(101)
Sector 1
Sector 2Sector 3
Sector 4
Sector 5 Sector 6
Fig. 3.14. Sectors in the classical DTC method
For the stator flux vector laying in sector 1 (Fig. 3.15) in order to increase its
magnitude the voltage vectors U1, U2, U6 can be selected. Conversely, a decrease can be
obtained by selecting U3, U4, U5. By applying one of the zero vectors U0 or U7 the
integration in equation (3.33) is stopped. The stator flux vector is not changed.
For the torque control, angle between stator and rotor flux is used (equation
3.31). Therefore, to increase motor torque the voltage vectors U2, U3, U4 can be selected
and to decrease U1, U5, U6.
The above considerations allow construction of the selection table as presented in
Table 3.1.
-
8/22/2019 Marcin Zelechowski
62/175
3. Vector Control Methods of Induction Motor
56
s
r
Sector 1
U2
U3
U1
U4
U5
U6
Fig. 3.15. Selection of the optimum voltage vectors for the stator flux vector in sector 1
Table 3.1. Optimum switching table
d Md Sector 1 Sector 2 Sector 3 Sector 4 Sector 5 Sector