(komputerowe) przetwarzanie obrazu
31
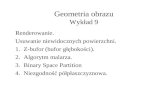
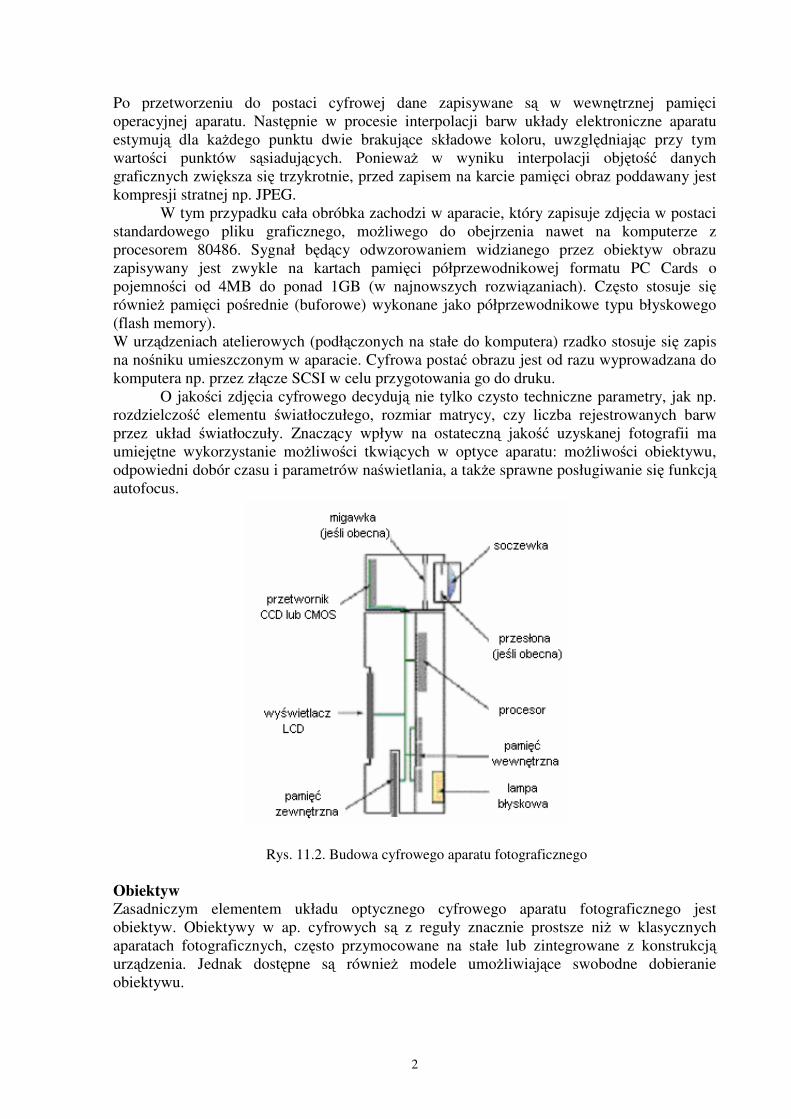
1 11. Cyfrowa kamera fotograficzna oraz cyfrowe (komputerowe) przetwarzanie obrazu 11.1. Budowa i zasada dzialania aparatu fotograficznego Cyfrowy aparat fotograficzny jest urządzeniem niewielkich rozmiarów pozwalającym na fotografowanie obrazów, wykorzystując jako material światloczuly czujniki, obecnie najczęściej CCD lub CMOS. Obraz wędruje do pamięci aparatu, skąd zazwyczaj transmitowany jest do wyświetlacza LCD oraz na nośnik pamięci, którym może być karta CompactFlash, SmartMedia, MemoryStick itp.. Są także inne sposoby magazynowania danych – dyskietka, mala plyta CD-R lub rozpowszechniony glównie w kamerach wideo nośnik MultiMediaCard. Podstawową różnicą pomiędzy aparatami fotograficznymi, a ich cyfrowymi odpowiednikami, jest element światloczuly. W aparacie analogowym światlo padające przez obiektyw aparatu na film wywoluje na jego światloczulej powierzchni nieodwracalną reakcję chemiczną. Rys. 11.1. Schemat blokowy cyfrowego aparatu fotograficznego W cyfrowych aparatach fotograficznych obraz rzutowany jest przez uklad optyczny na przetwornik światloczuly CCD lub CMOS. Obraz w aparacie cyfrowym rejestrowany jest na elemencie światloczulym jedynie przez chwilę, po czym sygnal świetlny zostaje zamieniony na impulsy elektryczne. Taki sposób rejestracji wprowadza możliwość natychmiastowego podglądu wykonanego ujęcia z możliwością jego wstępnej edycji czy usunięcia. Analogowe dane opisujące luminancję każdego punktu obrazu (skladowe: czerwona, zielona lub niebieska) trafiają do przetwornika analogowo cyfrowego. przetwornik A/C procesor sterujący oraz pamięć pólprzewodnikowa dysk miniaturowy obiektyw Przetwornik CCD / CMOS bezpośrednie zlącze SCSI (w aparatach Zapis do pamięci (w aparatach na PC-Card przenośnych)
Transcript of (komputerowe) przetwarzanie obrazu

1
11. Cyfrowa kamera fotograficzna oraz cyfrowe (komputerowe)
przetwarzanie obrazu
11.1. Budowa i zasada działania aparatu fotograficznego
Cyfrowy aparat fotograficzny jest urządzeniem niewielkich rozmiarów pozwalającym na
fotografowanie obrazów, wykorzystując jako materiał światłoczuły czujniki, obecnie
najczęściej CCD lub CMOS. Obraz wędruje do pamięci aparatu, skąd zazwyczaj
transmitowany jest do wyświetlacza LCD oraz na nośnik pamięci, którym może być karta
CompactFlash, SmartMedia, MemoryStick itp.. Są także inne sposoby magazynowania
danych – dyskietka, mała płyta CD-R lub rozpowszechniony głównie w kamerach wideo
nośnik MultiMediaCard.
Podstawową różnicą pomiędzy aparatami fotograficznymi, a ich cyfrowymi odpowiednikami,
jest element światłoczuły. W aparacie analogowym światło padające przez obiektyw aparatu
na film wywołuje na jego światłoczułej powierzchni nieodwracalną reakcję chemiczną.
Rys. 11.1. Schemat blokowy cyfrowego aparatu fotograficznego
W cyfrowych aparatach fotograficznych obraz rzutowany jest przez układ optyczny na
przetwornik światłoczuły CCD lub CMOS. Obraz w aparacie cyfrowym rejestrowany jest na
elemencie światłoczułym jedynie przez chwilę, po czym sygnał świetlny zostaje zamieniony
na impulsy elektryczne. Taki sposób rejestracji wprowadza możliwość natychmiastowego
podglądu wykonanego ujęcia z możliwością jego wstępnej edycji czy usunięcia.
Analogowe dane opisujące luminancję każdego punktu obrazu (składowe: czerwona, zielona
lub niebieska) trafiają do przetwornika analogowo cyfrowego.
przetwornik
A/C
procesor
sterujący
oraz
pamięć półprzewodnikowa
dysk miniaturowy
obiektyw
Przetwornik
CCD / CMOS
bezpośrednie złącze
SCSI
(w aparatach
Zapis do pamięci
(w aparatach na PC-Card
przenośnych)
2
Po przetworzeniu do postaci cyfrowej dane zapisywane są w wewnętrznej pamięci
operacyjnej aparatu. Następnie w procesie interpolacji barw układy elektroniczne aparatu
estymują dla każdego punktu dwie brakujące składowe koloru, uwzględniając przy tym
wartości punktów sąsiadujących. Ponieważ w wyniku interpolacji objętość danych
graficznych zwiększa się trzykrotnie, przed zapisem na karcie pamięci obraz poddawany jest
kompresji stratnej np. JPEG.
W tym przypadku cała obróbka zachodzi w aparacie, który zapisuje zdjęcia w postaci
standardowego pliku graficznego, możliwego do obejrzenia nawet na komputerze z
procesorem 80486. Sygnał będący odwzorowaniem widzianego przez obiektyw obrazu
zapisywany jest zwykle na kartach pamięci półprzewodnikowej formatu PC Cards o
pojemności od 4MB do ponad 1GB (w najnowszych rozwiązaniach). Często stosuje się również pamięci pośrednie (buforowe) wykonane jako półprzewodnikowe typu błyskowego
(flash memory).
W urządzeniach atelierowych (podłączonych na stałe do komputera) rzadko stosuje się zapis
na nośniku umieszczonym w aparacie. Cyfrowa postać obrazu jest od razu wyprowadzana do
komputera np. przez złącze SCSI w celu przygotowania go do druku.
O jakości zdjęcia cyfrowego decydują nie tylko czysto techniczne parametry, jak np.
rozdzielczość elementu światłoczułego, rozmiar matrycy, czy liczba rejestrowanych barw
przez układ światłoczuły. Znaczący wpływ na ostateczną jakość uzyskanej fotografii ma
umiejętne wykorzystanie możliwości tkwiących w optyce aparatu: możliwości obiektywu,
odpowiedni dobór czasu i parametrów naświetlania, a także sprawne posługiwanie się funkcją autofocus.
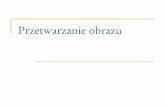
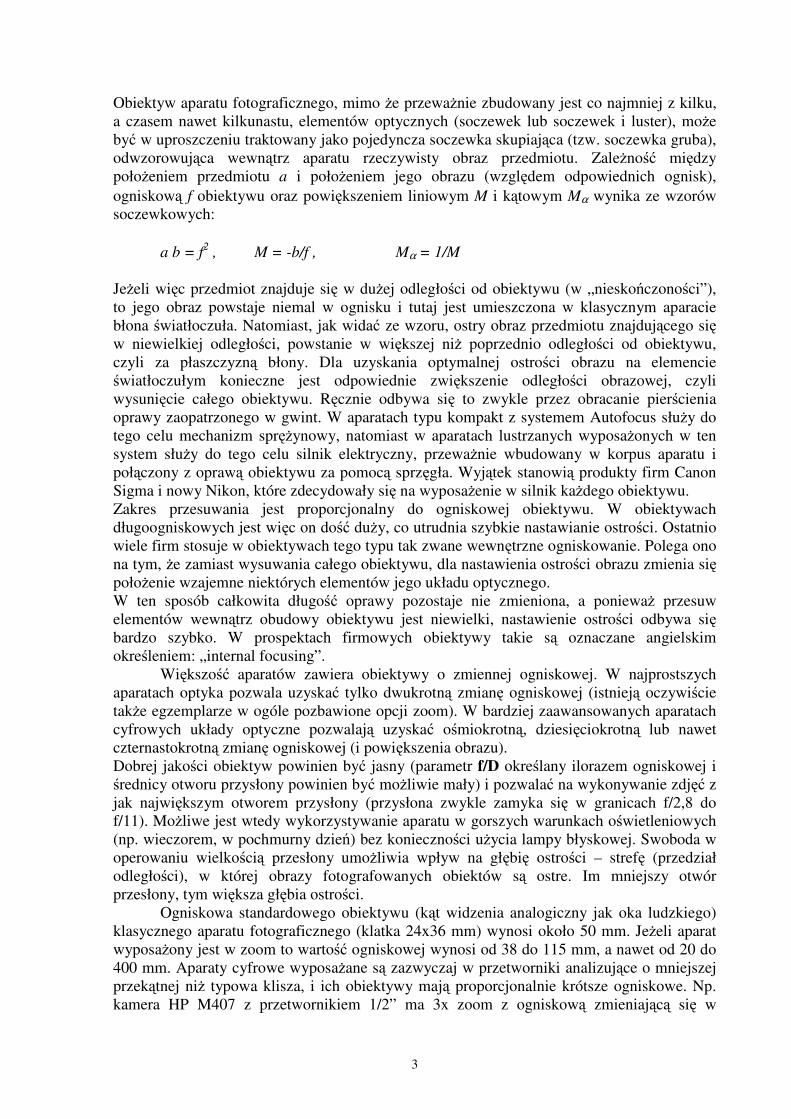
Rys. 11.2. Budowa cyfrowego aparatu fotograficznego
Obiektyw Zasadniczym elementem układu optycznego cyfrowego aparatu fotograficznego jest
obiektyw. Obiektywy w ap. cyfrowych są z reguły znacznie prostsze niż w klasycznych
aparatach fotograficznych, często przymocowane na stałe lub zintegrowane z konstrukcją urządzenia. Jednak dostępne są również modele umożliwiające swobodne dobieranie
obiektywu.
3
Obiektyw aparatu fotograficznego, mimo że przeważnie zbudowany jest co najmniej z kilku,
a czasem nawet kilkunastu, elementów optycznych (soczewek lub soczewek i luster), może
być w uproszczeniu traktowany jako pojedyncza soczewka skupiająca (tzw. soczewka gruba),
odwzorowująca wewnątrz aparatu rzeczywisty obraz przedmiotu. Zależność między
położeniem przedmiotu a i położeniem jego obrazu (względem odpowiednich ognisk),
ogniskową f obiektywu oraz powiększeniem liniowym M i kątowym Mα wynika ze wzorów
soczewkowych:
a b = f2 , M = -b/f , Mα = 1/M
Jeżeli więc przedmiot znajduje się w dużej odległości od obiektywu (w „nieskończoności”),
to jego obraz powstaje niemal w ognisku i tutaj jest umieszczona w klasycznym aparacie
błona światłoczuła. Natomiast, jak widać ze wzoru, ostry obraz przedmiotu znajdującego się w niewielkiej odległości, powstanie w większej niż poprzednio odległości od obiektywu,
czyli za płaszczyzną błony. Dla uzyskania optymalnej ostrości obrazu na elemencie
światłoczułym konieczne jest odpowiednie zwiększenie odległości obrazowej, czyli
wysunięcie całego obiektywu. Ręcznie odbywa się to zwykle przez obracanie pierścienia
oprawy zaopatrzonego w gwint. W aparatach typu kompakt z systemem Autofocus służy do
tego celu mechanizm sprężynowy, natomiast w aparatach lustrzanych wyposażonych w ten
system służy do tego celu silnik elektryczny, przeważnie wbudowany w korpus aparatu i
połączony z oprawą obiektywu za pomocą sprzęgła. Wyjątek stanowią produkty firm Canon
Sigma i nowy Nikon, które zdecydowały się na wyposażenie w silnik każdego obiektywu.
Zakres przesuwania jest proporcjonalny do ogniskowej obiektywu. W obiektywach
długoogniskowych jest więc on dość duży, co utrudnia szybkie nastawianie ostrości. Ostatnio
wiele firm stosuje w obiektywach tego typu tak zwane wewnętrzne ogniskowanie. Polega ono
na tym, że zamiast wysuwania całego obiektywu, dla nastawienia ostrości obrazu zmienia się położenie wzajemne niektórych elementów jego układu optycznego.
W ten sposób całkowita długość oprawy pozostaje nie zmieniona, a ponieważ przesuw
elementów wewnątrz obudowy obiektywu jest niewielki, nastawienie ostrości odbywa się bardzo szybko. W prospektach firmowych obiektywy takie są oznaczane angielskim
określeniem: „internal focusing”.
Większość aparatów zawiera obiektywy o zmiennej ogniskowej. W najprostszych
aparatach optyka pozwala uzyskać tylko dwukrotną zmianę ogniskowej (istnieją oczywiście
także egzemplarze w ogóle pozbawione opcji zoom). W bardziej zaawansowanych aparatach
cyfrowych układy optyczne pozwalają uzyskać ośmiokrotną, dziesięciokrotną lub nawet
czternastokrotną zmianę ogniskowej (i powiększenia obrazu).
Dobrej jakości obiektyw powinien być jasny (parametr f/D określany ilorazem ogniskowej i
średnicy otworu przysłony powinien być możliwie mały) i pozwalać na wykonywanie zdjęć z
jak największym otworem przysłony (przysłona zwykle zamyka się w granicach f/2,8 do
f/11). Możliwe jest wtedy wykorzystywanie aparatu w gorszych warunkach oświetleniowych
(np. wieczorem, w pochmurny dzień) bez konieczności użycia lampy błyskowej. Swoboda w
operowaniu wielkością przesłony umożliwia wpływ na głębię ostrości – strefę (przedział
odległości), w której obrazy fotografowanych obiektów są ostre. Im mniejszy otwór
przesłony, tym większa głębia ostrości.
Ogniskowa standardowego obiektywu (kąt widzenia analogiczny jak oka ludzkiego)
klasycznego aparatu fotograficznego (klatka 24x36 mm) wynosi około 50 mm. Jeżeli aparat
wyposażony jest w zoom to wartość ogniskowej wynosi od 38 do 115 mm, a nawet od 20 do
400 mm. Aparaty cyfrowe wyposażane są zazwyczaj w przetworniki analizujące o mniejszej
przekątnej niż typowa klisza, i ich obiektywy mają proporcjonalnie krótsze ogniskowe. Np.
kamera HP M407 z przetwornikiem 1/2” ma 3x zoom z ogniskową zmieniającą się w

4
granicach 6-18 mm. Najjaśniejsze obiektywy mają modele stało ogniskowe, co wynika z ich
prostszej konstrukcji optycznej. Istnieją również obiektywy zapewniające dobry tryb makro,
wykorzystywany do makrofotografii. Minimalna odległość obiektywu od fotografowanego
przedmiotu wynosi wtedy zaledwie 1 lub 2 centymetry. Uzyskanie podobnych rezultatów za
pomocą tradycyjnego aparatu fotograficznego wymaga użycia specjalnych akcesoriów (tzw.
pierścieni pośrednich) lub specjalistycznych obiektywów i jest znacznie bardziej kłopotliwe.
Migawka Innym charakterystycznym elementem układu optycznego jest migawka, która występuje
częściej w profesjonalnych urządzeniach cyfrowych. W aparatach bez migawki czas
ekspozycji (naświetlania) fotodetektorów regulowany jest elektronicznie np. przez odczyt z
określoną częstotliwością zgromadzonych w nich ładunków elektrycznych.
W aparatach cyfrowych stosowane są dwie metody naświetleń układu światłoczułego.
W droższych modelach wykorzystuje się mechanizm znany z konstrukcji analogowych, czyli
fizycznie zamontowaną w aparacie migawkę, otwierającą się na czas określony przez
fotografującego, lub przez automatykę aparatu. W tańszych modelach układ światłoczuły
poddawany jest naświetleniu cały czas, a pod pojęciem „czas otwarcia migawki” rozumie się czas, przez jaki matryca CCD lub CMOS będzie rejestrować dane ujęcie. Generalna zasada
jest prosta – im krótszy czas otwarcia migawki, tym większa szansa, że fotografowane
obiekty będą ostre i nieporuszone.
Niestety, krótszy czas otwarcia migawki to także mniej światła docierającego do
elementu światłoczułego, co z kolei może spowodować, że wykonywane zdjęcie będzie nie
doświetlone. Dodatkowo chcąc uzyskiwać dobre i ostre zdjęcia, warto stosować się także do
następującej reguły: maksymalny czas naświetlania powinien być odwrotnie proporcjonalny
do jasności (lecz proporcjonalny do liczby przesłony f/D) obiektywu.
Przesłona Z informacji podanych powyżej wynika, że czynnikiem decydującym o jakości uzyskanych
zdjęć jest wartość, czy też liczba przesłony f/D (iloraz ogniskowej i średnicy otworu
przysłony). O ile czas otwarcia migawki decyduje o tym, jak długo światło pada na element
światłoczuły, to liczba przesłony informuje o wielkości otworu, przez który światło pada na
ten element. Oczywiste jest, że aby zdjęcie nie wyszło prześwietlone lub nie doświetlone,
ilość padającego na układ światłoczuły światła musi być stała. Inaczej mówiąc, ekspozycja
musi pozostać niezmienna bez względu na regulację parametrów aparatu. Łatwo zauważyć prostą zależność. Im dłuższy będzie czas otwarcia migawki, tym mniejszy powinien być otwór przesłony (a większa liczba f/D).
11.2. Podstawowe pojęcia związane z cyfrowymi aparatami fotograficznymi oraz
z cyfrowym zapisem i komputerową obróbką obrazu
Autofocus Automatyczny system, który wykorzystuje silnik elektryczny wbudowany w obiektyw
lub korpus aparatu dla uzyskania takiego wysunięcia obiektywu, które zapewnia ostrość naświetlanego obrazu. Odległość od fotografowanego obiektu ustalana jest na podstawie np.
pomiaru różnicy faz fali wysyłanej przez aparat i odbitej od obiektów lub na podstawie
różnicowania kontrastów obrazu na przetworniku.
Nastawianie ostrości obrazu w systemie AF przebiega dwuetapowo i jest zależne od typu
aparatu. W aparatach z celownikiem lunetkowym nie ma możliwości bezpośredniej kontroli
ostrości obrazu, dlatego w pierwszym etapie układ pomiarowy ustala samoczynnie odległość przedmiotową, a w drugim etapie, po przetworzeniu tej informacji przez elektroniczny układ
5
sterujący, mechanizm wykonawczy nastawia odpowiednio obiektyw. Natomiast w aparatach
lustrzanych układ pomiarowy AF analizuje bezpośrednio ostrość obrazu odwzorowanego
przez obiektyw i na tej podstawie koryguje za pomocą silnika nastawienie obiektywu. Jak
więc widać, odbywa się to podobnie jak przy nastawianiu ręcznym. Systemy AF stosowane w
cyfrowych aparatach fotograficznych są analogiczne do systemów stosowanych w kamerach
wideo (patrz ćw. 9).
Rozdzielczość Łączna liczba punktów składających się na zarejestrowany obraz. Im więcej pikseli
tym zdjęcie jest wyraźniejsze, większe co do formatu i objętości. Teraz podstawowym
standardem dla aparatów cyfrowych jest rozdzielczość 1600x1200 pikseli. Im wyższa
rozdzielczość, tym większe możliwości aparatu. Wyższa rozdzielczość gwarantuje lepszą jakość obrazu i daje większe możliwości późniejszego przetwarzania pliku (kadrowania,
skalowania, retuszu). Rozdzielczość aparatu cyfrowego związana jest bezpośrednio z
rozmiarem matrycy CCD lub CMOS. Im więcej elementów światłoczułych zawiera matryca,
tym lepszą jakość zdjęć można uzyskać. Rozdzielczość zdjęć wyrażana może być również w następujących jednostkach:
- dpi (dots per inch) liczba kropek na cal wykonanego zdjęcia,
- lpi (lines per inch) liczba rozróżnialnych linii na cal,
- liczba linii na kadr (stosowana często w telewizji)
W ćwiczeniu rozdzielczość określana jest jako liczba rozróżnialnych linii na kadr
wykonanego zdjęcia. Pomiar rozdzielczości polega tutaj na określeniu liczby linii w kadrze
przy fotografowaniu wzorcowego testu.
Zoom optyczny Zdolność zbliżenia obrazu za pomocą regulacji optyki aparatu. W aparatach cyfrowych dość popularne są zoomy 3 krotne (3x).
Spotykane są również (dość rzadko) zoomy 14x np. w aparacie Sony MVC FD91.
Zoom cyfrowy Stratne jakościowo zbliżenie obrazu, polegające na wycięciu fragmentu z całości zdjęcia i
elektronicznym powiększeniu go. Powiększenie cyfrowe jest możliwe dzięki interpolacji
(sztucznego powielenia pikseli) lub udostępnienia tego mechanizmu jedynie w niższych
rozdzielczościach oferowanych przez aparat (wykorzystywany jest wtedy powstały w ten
sposób „zapas” pikseli okupiony niższą rozdzielczością). Zatem zoom cyfrowy prawie zawsze
powoduje (pośrednio lub bezpośrednio) spadek jakości danego zdjęcia.
Ekspozycja Ilość światła, którego działaniu poddaje się materiał światłoczuły, regulowana czasem
otwarcia migawki oraz przesłoną obiektywu.
W aparatach cyfrowych czułość elementów CCD/CMOS jest regulowana.
Zwiększenie czułości powoduje wzrost zakłóceń rejestrowanych przez matrycę światłoczułą. Dobór czułości jest praktycznie zawsze sprawą kompromisu, jednak przy dobrym oświetleniu
należy ustawić najniższą wartość ISO.
Kompresja obrazu Algorytm zmniejszania rozmiaru pliku ze zdjęciem kosztem utraty jakości obrazu. Kompresję obrazu stosuje się w celu zmniejszenia rozmiaru pliku zawierającego zdjęcie, a także w celu
zapewnienia krótkiego czasu zapisu obrazu do pamięci. Kompresja może być stała lub

6
progresywna. Im większy stopień kompresji tym plik jest mniejszy, czyli możemy zapisać większą liczbę zdjęć, lecz gorsza jakość zdjęcia. Kompresja nie jest odwracalna, tzn.
skompresowanego zdjęcia nie można odtworzyć w formie przed kompresją, stąd konieczność świadomego wyboru trybu kompresji przed wykonaniem zdjęcia. Ma to znaczenie przy
zdjęciach wymagających powiększenia małego fragmentu obrazu. Często stosowany algorytm
JPEG bazuje na założeniu, że informacja o jasności danego punktu obrazu jest znacznie
ważniejsza od informacji o kolorze tego punktu (co wynika z fizjologicznych uwarunkowań
ludzkiego wzroku).
Efekt czerwonych oczu Efekt pojawiający się na zdjęciach barwnych przy fotografowaniu osób za pomocą lampy
błyskowej, umieszczonej blisko osi obiektywu (dotyczy wszystkich lamp wbudowanych do
aparatu). Uwidacznia się on w postaci czerwonej plamki w centralnej części oka
portretowanej osoby. W większości aparatów cyfrowych istnieje możliwość zredukowania
tego efektu, dzięki funkcji tzw. przed błysku. Polega to na wstępnym mignięciu lampy
błyskowej tuż przed wykonaniem zdjęcia. Silny strumień światła powoduje zwężenie źrenic
fotografowanej osoby dzięki czemu niepożądany efekt jest minimalizowany.
11.3. Komputerowa obróbka zdjęć
Do komputerowej obróbki zdjęć wybrano dwa programy: HP Photo Printing -
stanowiący element pakietu dostarczonego z aparatem cyfrowym HP Photo Smart C200
(i fakultatywnie Corel Photo Paint - będący reprezentantem „kombajnów” o bardzo dużych
możliwościach edycyjnych).
Zwrócono szczególną uwagę na podstawowe elementy korekcji obrazu:
- kadrowanie,
- identyfikację i usunięcie przebarwienia, regulację chrominancji,
- zmiana luminancji (jasności),
- wyostrzanie zdjęcia,
- zapis zdjęć po obróbce,
- umieszczanie zdjęć na stronie internetowej
Przedstawione tutaj sposoby obróbki zdjęć często wprowadzają nieodwracalne zmiany
dlatego też przed przystąpieniem do edycji należy zapisać zdjęcie w nowym pliku. Daje to
kopię oryginalnego zdjęcia i ewentualną możliwość powrotu do stanu przed edycją.
Kadrowanie obrazu
Często obszar kadru na wizjerze podglądu LCD aparatu cyfrowego jest mniejszy od
rzeczywiście rejestrowanego. W związku z tym w kadrze mogą pojawiać się niepożądane
elementy, których podczas fotografowania nie można było zobaczyć, i trzeba je usunąć za
pomocą kadrowania obrazu.
Kadrowanie stosuje się głównie, gdy ważny obiekt zdjęcia zajmuje niewielki jego obszar np.
dolny róg obrazu, resztę zaś wypełnia niebo, drzewa lub inne tło. Kadrowanie nie sprawia
problemów dla zdjęć wykonanych w wysokiej rozdzielczości np. 1600x1200. Wówczas
należy wyciąć interesujący fragment usuwając niepotrzebną część. W programie HP Photo Printing, po wybraniu interesującego zaznaczenia, przez ograniczenie
dostępnymi narożnikami, należy zaakceptować zmianę (Accept) a następnie zapisać w nowym
pliku (Save Image As).
7
Identyfikacja i usunięcie przebarwienia - dopasowanie chrominancji obrazu
Zdjęcia wykonane aparatem cyfrowym często zawierają wszelkiego rodzaju
przebarwienia tłumiące rzeczywiste kolory. Przebarwienia te można zidentyfikować i usunąć w programach graficznych wykorzystując w tym celu kroplomierz. Identyfikacja
przebarwienia polega na wybraniu do analizy kilku punktów odpowiedzialnych za odcienie
jasne, neutralne i ciemne:
• elementy jasne (światła) zdecydowanie najjaśniejsze i białe obszary zdjęcia
zachowujące szczegóły. Z dwoma wyjątkami. Nie mogą być nimi źródła światła, ani
odbłyski. Światła to obszary, o których z dużą pewnością wiadomo, iż są białe.
• elementy neutralne (półcienie), czyli kolory czarny, biały i wszystkie odcienie
szarości. Kolory neutralne występują bardzo często. Obiektami w kolorach
neutralnych są często chodniki, ulice, elementy stalowe.
• elementy czarne (cienie) czyli najciemniejsze i w znacznym stopniu neutralne obszary
zdjęcia, które zawierają szczegóły i które jest w stanie wydrukować drukarka.
Punktem ciemnym może być np. element budynku znajdujący się w cieniu.
Dokonując korekty zdjęć, na których są osoby, można wybrać punkty odpowiedzialne za
odcienie skóry. Przy korekcji odcieni skóry należy wziąć pod uwagę cerę fotografowanej
osoby i stosować pod tym kątem edycję. Należy pamiętać, aby w przypadku dość dużego
zbliżenia twarzy, rąk, czy innych odsłoniętych części ciała, obszar skóry nie był nadmiernie
prześwietlony, ani zacieniony i nie posiadał nienaturalnych kolorów (np. na skutek makijażu).
Przebarwienie zdjęcia można usunąć stosując regulację kolorów za pomocą koła barwnego,
lub, np. w programie Corel Photo Paint: edycję balansu kolorów i funkcję selektywnej zmiany
kolorów.
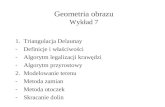
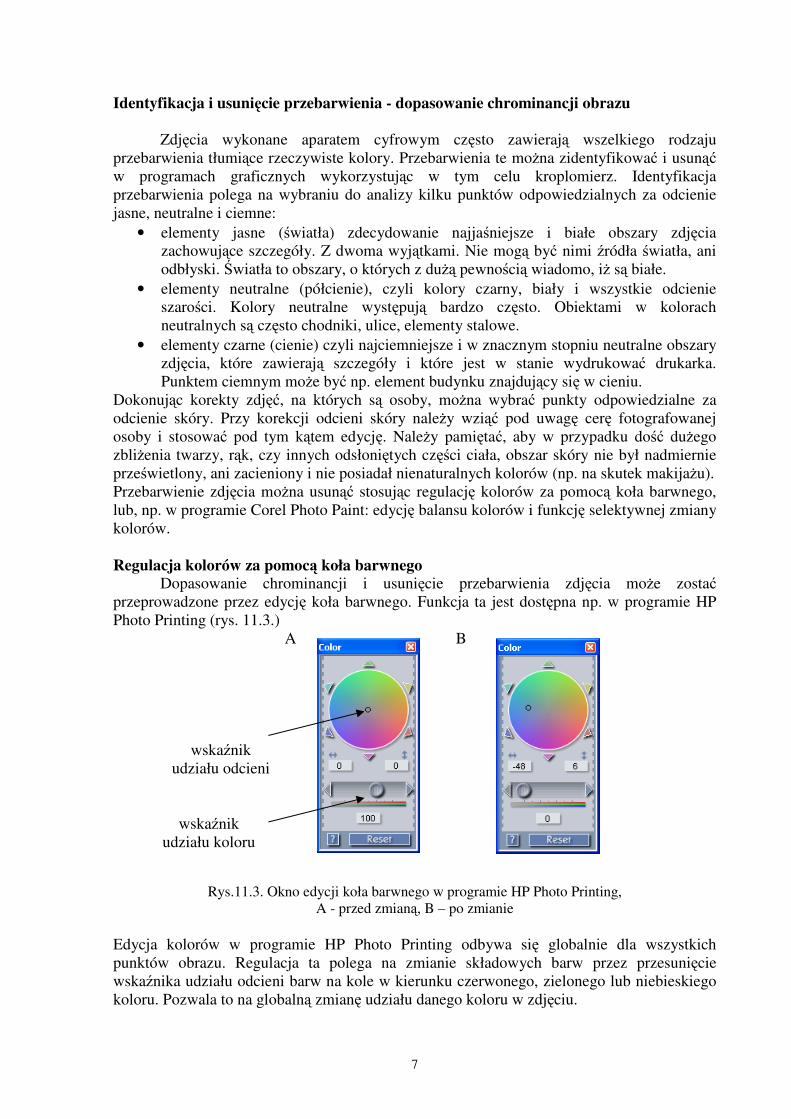
Regulacja kolorów za pomocą koła barwnego
Dopasowanie chrominancji i usunięcie przebarwienia zdjęcia może zostać przeprowadzone przez edycję koła barwnego. Funkcja ta jest dostępna np. w programie HP
Photo Printing (rys. 11.3.)
A B
Rys.11.3. Okno edycji koła barwnego w programie HP Photo Printing,
A - przed zmianą, B – po zmianie
Edycja kolorów w programie HP Photo Printing odbywa się globalnie dla wszystkich
punktów obrazu. Regulacja ta polega na zmianie składowych barw przez przesunięcie
wskaźnika udziału odcieni barw na kole w kierunku czerwonego, zielonego lub niebieskiego
koloru. Pozwala to na globalną zmianę udziału danego koloru w zdjęciu.
wskaźnik
udziału odcieni
barw
wskaźnik
udziału koloru
w zdjęciu

8
Funkcja edycji koła barwnego pozwala również na płynną regulację koloru w obrazku.
Regulacja ta odbywa się poprzez zmianę położenia wskaźnika udziału koloru. Efektem może
być np. uzyskanie zdjęcia czarno-białego (skrajne lewe położenie wskaźnika) (rys.11.3. B)
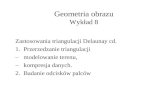
Zmiana luminancji (jasności) zdjęcia
Jednym z parametrów zdjęcia jest jego jasność. Często w zdjęciach ważne jest
uwidocznienie ciemnych niewidocznych szczegółów lub też osłabienie niekorzystnego
wpływu światła. W tym celu wykorzystuje się funkcje pozwalające na regulację jasności
zdjęć. Zmianę jasności zdjęcia można uzyskać w programie HP Photo Printing wykorzystując
funkcję Exposure (naświetlenie) dostępną w menu programu (rys.11.4.)
Regulacja luminancji odbywa się tutaj selektywnie poprzez zmianę suwaków oświetlenia dla
punktów zawierających informacje odpowiadające: światłom, półcieniom oraz cieniom.
Rys.11.4. Okno edycji oświetlenia w programie HP Photo Printing.
Wyostrzanie zdjęcia.
O jakości zdjęcia, oprócz prawidłowej struktury luminancji i barwy, decyduje również poprawne odwzorowanie szczegółów. Nieostrości mogą powstać przy fotografowaniu
aparatem cyfrowym, posiadającym zbyt małą matrycę światłoczułą, lub przy fotografowaniu
w niekorzystnych warunkach (np. we mgle, w deszczu, wieczorem). Poprawę ostrości obrazu,
można uzyskać przez zwiększenie kontrastu na krawędziach obiektów zdjęcia.
W programie HP Photo Printing wyostrzanie zdjęcia można przeprowadzić wykorzystując dostępną w menu funkcję Sharpnes, umożliwiającą zwiększenie ostrości
rozmytych elementów obrazka i zwiększającą kontrast między sąsiadującymi pikselami.
Regulację efektu można dokonać wykorzystując dostępny suwak (rys.11.5.)
Przesunięcie suwaka w lewą stronę powoduje wprowadzenie rozmycia i może być wykorzystane np. do tworzenia zdjęć portretowych.
suwak regulacji
półcieni
(midtones)
suwak regulacji cieni
(shadows) suwak regulacji
świateł
(highlights)
Rys. 11.5. Okno dialogowe
funkcji wyostrzania w
programie HP Photo
Printing
9
Zapis zdjęć po obróbce
Jednym z bardzo ważnych elementów obróbki obrazów jest zapisywanie zdjęć po
retuszu. Proces ten może mieć szczególny wpływ na jakość zdjęć, dlatego też należy zwracać uwagę na to, jak zapisywane jest zdjęcie. W profesjonalnych programach graficznych typu
Corel Photo Paint, Photo Shop, Paint Shop Pro można decydować zarówno o formacie pliku,
w jakim będzie zapisane zdjęcie (BMP, JPEG, TIFF), a także o opcjach formatu zapisu i
rozmiarze zapisywanego pliku. Parametry zapisu należy dobierać mając na uwadze, gdzie
dalej będzie wykorzystane zdjęcie. Jeśli zdjęcie będzie wykorzystane do publikacji na stronie
www to należy je zapisać w takim formacie aby umożliwić szybkie załadowanie, obejrzenie
a także ściągnięcie ze strony. Skalując grafikę bitmapową należy liczyć się z pewną utratą jakości. Przy powiększeniu program będzie musiał dorobić brakujące obszary między
pikselami, przy pomniejszeniu zaś tracona jest część informacji o tonach i kolorystyce.
"Nadprogramowe" piksele będą natomiast usuwane.
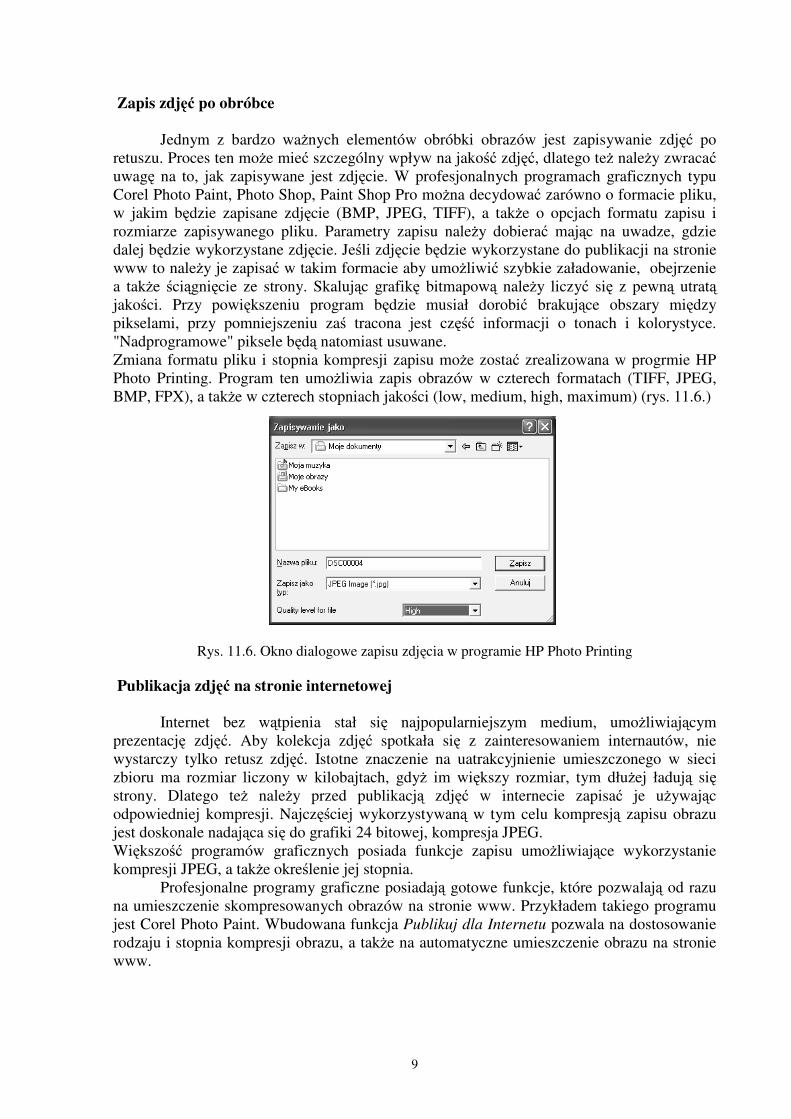
Zmiana formatu pliku i stopnia kompresji zapisu może zostać zrealizowana w progrmie HP
Photo Printing. Program ten umożliwia zapis obrazów w czterech formatach (TIFF, JPEG,
BMP, FPX), a także w czterech stopniach jakości (low, medium, high, maximum) (rys. 11.6.)
Rys. 11.6. Okno dialogowe zapisu zdjęcia w programie HP Photo Printing
Publikacja zdjęć na stronie internetowej
Internet bez wątpienia stał się najpopularniejszym medium, umożliwiającym
prezentację zdjęć. Aby kolekcja zdjęć spotkała się z zainteresowaniem internautów, nie
wystarczy tylko retusz zdjęć. Istotne znaczenie na uatrakcyjnienie umieszczonego w sieci
zbioru ma rozmiar liczony w kilobajtach, gdyż im większy rozmiar, tym dłużej ładują się strony. Dlatego też należy przed publikacją zdjęć w internecie zapisać je używając
odpowiedniej kompresji. Najczęściej wykorzystywaną w tym celu kompresją zapisu obrazu
jest doskonale nadająca się do grafiki 24 bitowej, kompresja JPEG.
Większość programów graficznych posiada funkcje zapisu umożliwiające wykorzystanie
kompresji JPEG, a także określenie jej stopnia.
Profesjonalne programy graficzne posiadają gotowe funkcje, które pozwalają od razu
na umieszczenie skompresowanych obrazów na stronie www. Przykładem takiego programu
jest Corel Photo Paint. Wbudowana funkcja Publikuj dla Internetu pozwala na dostosowanie
rodzaju i stopnia kompresji obrazu, a także na automatyczne umieszczenie obrazu na stronie
www.

10
OPTYKA GEOMETRYCZNA
– wprowadzenie
Niemal każdy system optoelektroniczny zawiera – oprócz źródła światła i detektora - co
najmniej jeden element optyczny, najczęściej soczewkę gdy system służy do analizy obrazu.
Soczewki – elementy opt. umożliwiające uzyskanie odwzorowania optycznego tj. obrazu.
Działają na zasadzie załamania (refrakcji) na granicy dwóch ośrodków, zgodnie z prawem
Snella: n1 sin θ1 = n2 sin θ2 Najprostszą soczewkę stanowi powierzchnia sferyczna
stanowiąca granicę dwóch ośr.: powietrza, o wsp. załamania n1 i szkła o wsp. załamania n2 .
Jest to tzw. soczewka immersyjna (zanurzona), gdzie przedmiot i obraz są „zanurzone” w
różnych ośrodkach. Położenie obrazu i jego powiększenie wynika z zależności:
n1 /x1 + n2 /x2 = (n2 - n1)R oraz M = h2 /h1 = n1 x2 / n2 x1
. << Soczewka
immersyjna
. ciecz immersyjna - n2
Soczewki mają zazwyczaj
dwie powierzchnie
sferyczne (lub sferyczną i
płaską):
Działanie soczewek względem
strumienia świetlnego może być: a)rozpraszające, b)skupiające,
c)kolimujące światło
11
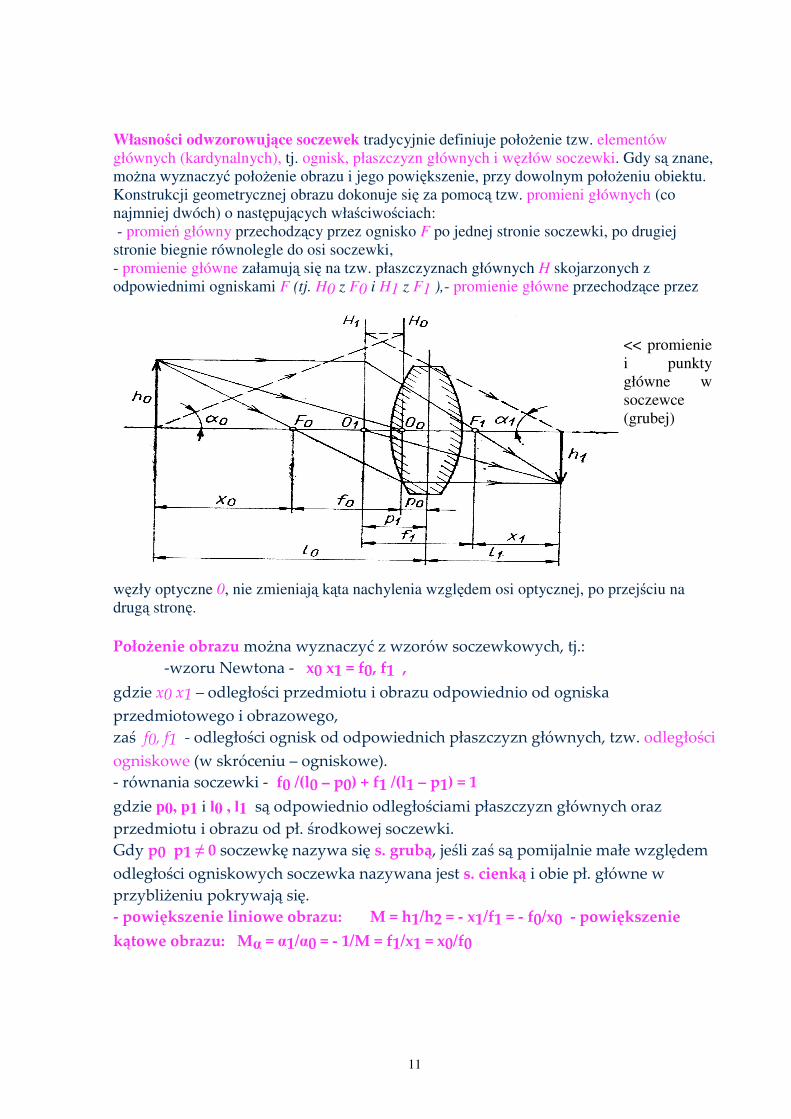
Własności odwzorowujące soczewek tradycyjnie definiuje położenie tzw. elementów
głównych (kardynalnych), tj. ognisk, płaszczyzn głównych i węzłów soczewki. Gdy są znane,
można wyznaczyć położenie obrazu i jego powiększenie, przy dowolnym położeniu obiektu.
Konstrukcji geometrycznej obrazu dokonuje się za pomocą tzw. promieni głównych (co
najmniej dwóch) o następujących właściwościach:
- promień główny przechodzący przez ognisko F po jednej stronie soczewki, po drugiej
stronie biegnie równolegle do osi soczewki,
- promienie główne załamują się na tzw. płaszczyznach głównych H skojarzonych z
odpowiednimi ogniskami F (tj. H0 z F0 i H1 z F1 ),- promienie główne przechodzące przez
węzły optyczne 0, nie zmieniają kąta nachylenia względem osi optycznej, po przejściu na
drugą stronę.
Położenie obrazu można wyznaczyć z wzorów soczewkowych, tj.:
-wzoru Newtona - x0 x1 = f0, f1 ,
gdzie x0 x1 – odległości przedmiotu i obrazu odpowiednio od ogniska
przedmiotowego i obrazowego,
zaś f0, f1 - odległości ognisk od odpowiednich płaszczyzn głównych, tzw. odległości
ogniskowe (w skróceniu – ogniskowe).
- równania soczewki - f0 /(l0 – p0) + f1 /(l1 – p1) = 1
gdzie p0, p1 i l0 , l1 są odpowiednio odległościami płaszczyzn głównych oraz
przedmiotu i obrazu od pł. środkowej soczewki.
Gdy p0 p1 ≠ 0 soczewkę nazywa się s. grubą, jeśli zaś są pomijalnie małe względem
odległości ogniskowych soczewka nazywana jest s. cienką i obie pł. główne w
przybliżeniu pokrywają się.
- powiększenie liniowe obrazu: M = h1/h2 = - x1/f1 = - f0/x0 - powiększenie
kątowe obrazu: Mα = α1/α0 = - 1/M = f1/x1 = x0/f0
<< promienie
i punkty
główne w
soczewce
(grubej)
12
Odwzorowanie optyczne (wierne) –
- promienie świetlne emitowane z każdego punktu przedmiotu trafiają do
odpowiadającego mu punktu obrazu,
-odległości między rozpatrywanymi punktami obrazu h1 są proporcjonalne do odl.
między odpowiadającymi im punktami przedmiotu h0 , a współczynnikiem
proporcjonalności jest powiększenie liniowe obrazu M.
Wierne odwzorowanie opt. jest możliwe gdy realizujące je promienie są prawie
osiowe (paraksjalne), tzn. odległości i nachylenia względem osi są bliskie zera.
Soczewki muszą mieć niezakłóconą symetrię obrotową.
Jeśli ten warunek (w. optyki gaussowskiej) nie jest spełniony, powstają błędy
odwzorowania (aberracje) geometryczne i fizyczne, m.in.:
- aberracja chromatyczna, - błąd dyfrakcji, - aberracja sferyczna,
- astygmatyzm, - zakrzywienie pola obrazu, - dystorsja (przerysowanie).
Aberracje fizyczne wynikają z fizycznych własności światła, w tym własności
wynikających z charakteru falowego. Zaliczają się tu, m.in.:
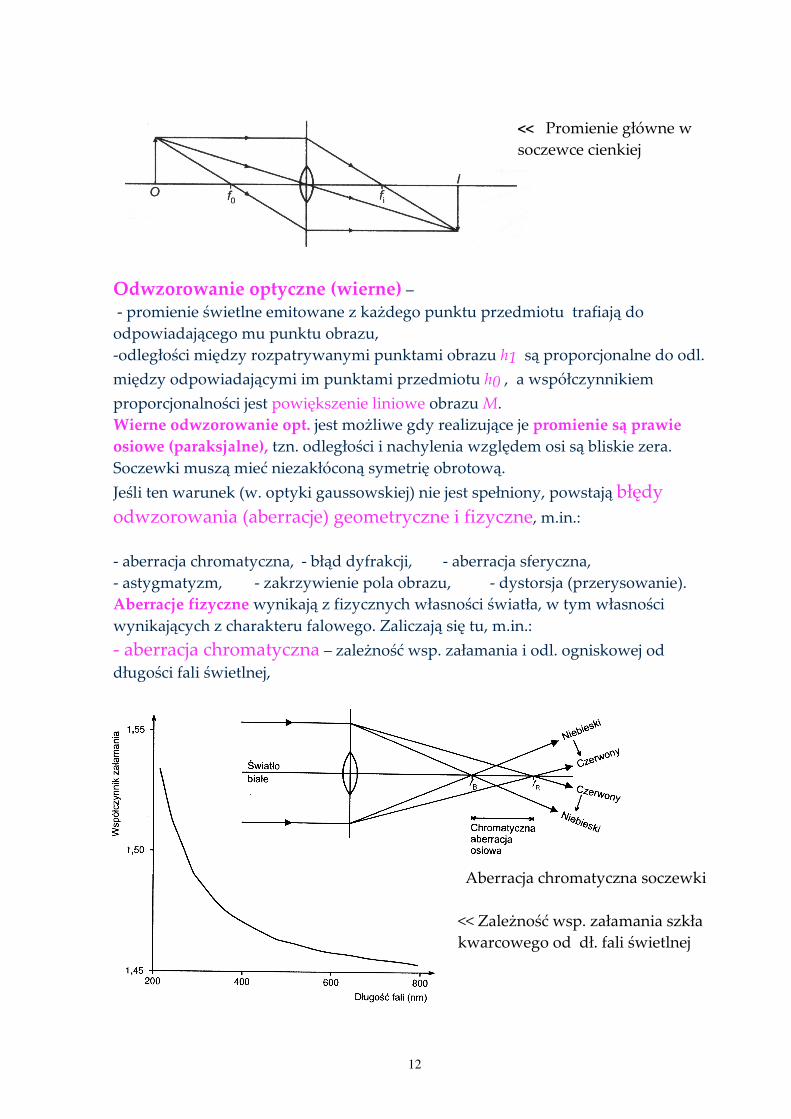
- aberracja chromatyczna – zależność wsp. załamania i odl. ogniskowej od
długości fali świetlnej,
<< Promienie główne w
soczewce cienkiej
Aberracja chromatyczna soczewki
<< Zależność wsp. załamania szkła
kwarcowego od dł. fali świetlnej
13
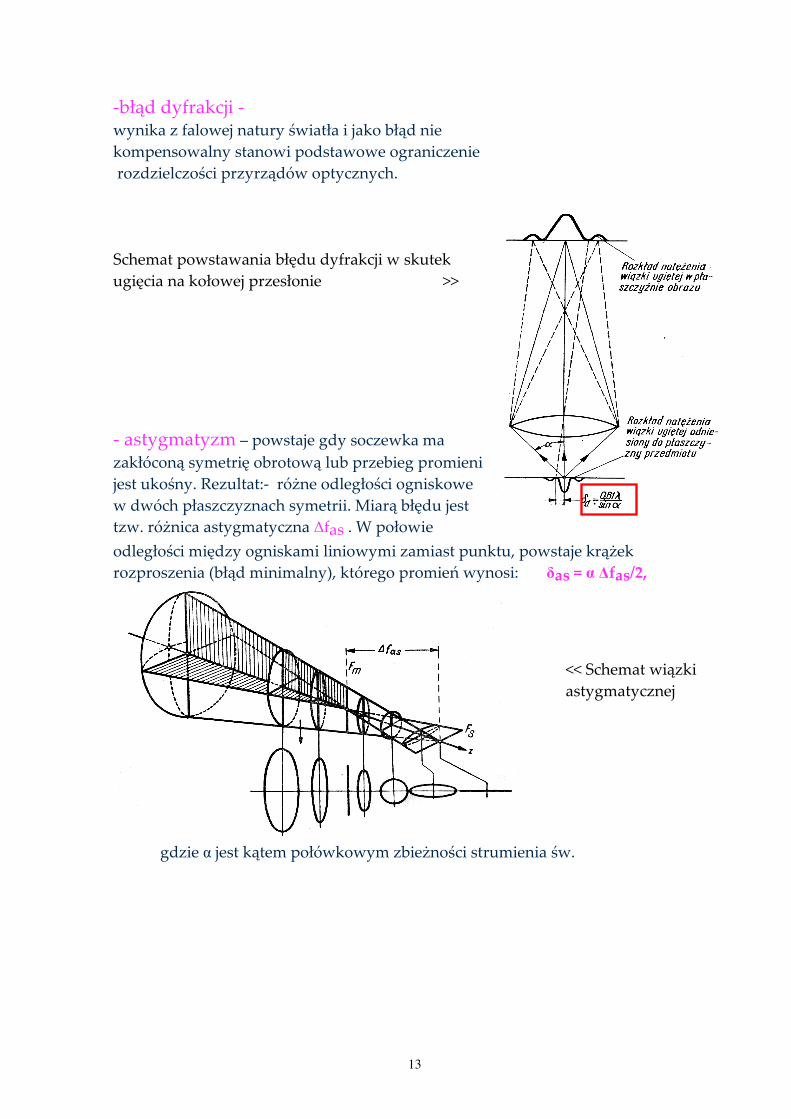
-błąd dyfrakcji - wynika z falowej natury światła i jako błąd nie
kompensowalny stanowi podstawowe ograniczenie
rozdzielczości przyrządów optycznych.
Schemat powstawania błędu dyfrakcji w skutek
ugięcia na kołowej przesłonie >>
- astygmatyzm – powstaje gdy soczewka ma
zakłóconą symetrię obrotową lub przebieg promieni
jest ukośny. Rezultat:- różne odległości ogniskowe
w dwóch płaszczyznach symetrii. Miarą błędu jest
tzw. różnica astygmatyczna ∆fas . W połowie
odległości między ogniskami liniowymi zamiast punktu, powstaje krążek
rozproszenia (błąd minimalny), którego promień wynosi: δas = α ∆fas/2,
gdzie α jest kątem połówkowym zbieżności strumienia św.
.
<< Schemat wiązki
astygmatycznej
14
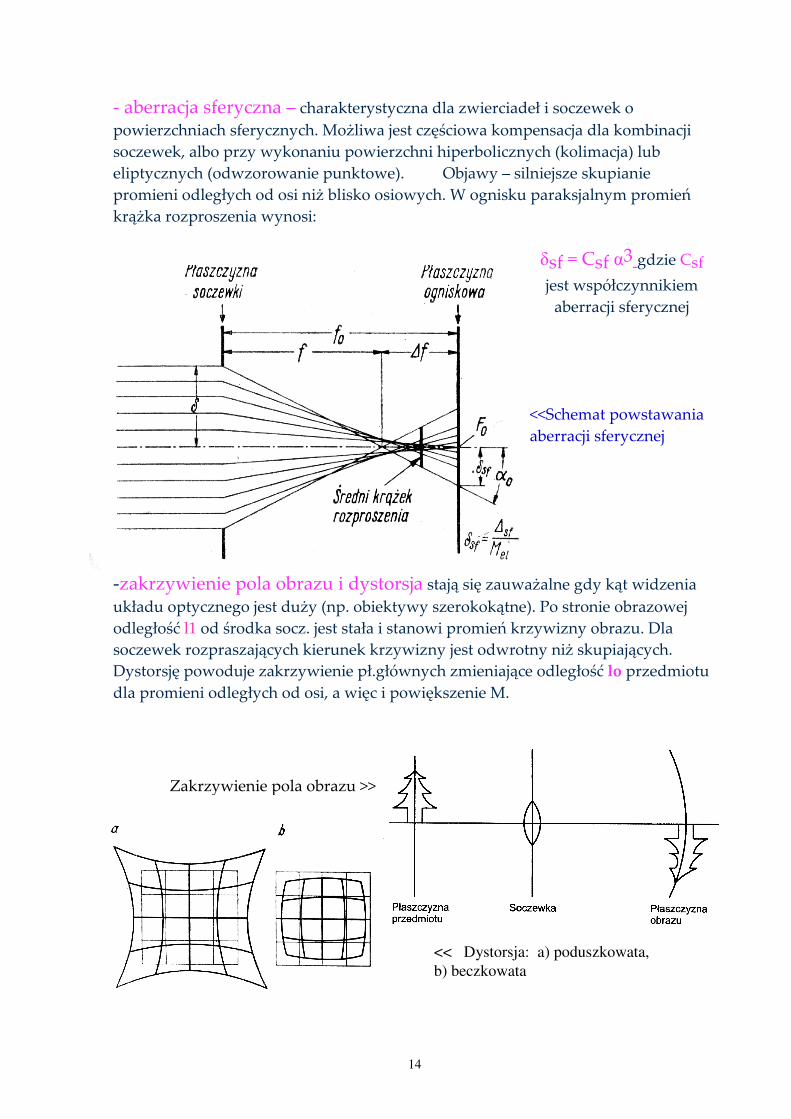
- aberracja sferyczna – charakterystyczna dla zwierciadeł i soczewek o
powierzchniach sferycznych. Możliwa jest częściowa kompensacja dla kombinacji
soczewek, albo przy wykonaniu powierzchni hiperbolicznych (kolimacja) lub
eliptycznych (odwzorowanie punktowe). Objawy – silniejsze skupianie
promieni odległych od osi niż blisko osiowych. W ognisku paraksjalnym promień
krążka rozproszenia wynosi:
-zakrzywienie pola obrazu i dystorsja stają się zauważalne gdy kąt widzenia
układu optycznego jest duży (np. obiektywy szerokokątne). Po stronie obrazowej
odległość l1 od środka socz. jest stała i stanowi promień krzywizny obrazu. Dla
soczewek rozpraszających kierunek krzywizny jest odwrotny niż skupiających.
Dystorsję powoduje zakrzywienie pł.głównych zmieniające odległość lo przedmiotu
dla promieni odległych od osi, a więc i powiększenie M.
δsf = Csf α3 gdzie Csf
jest współczynnikiem
aberracji sferycznej
<<Schemat powstawania
aberracji sferycznej
<< Dystorsja: a) poduszkowata,
b) beczkowata
Zakrzywienie pola obrazu >>
15
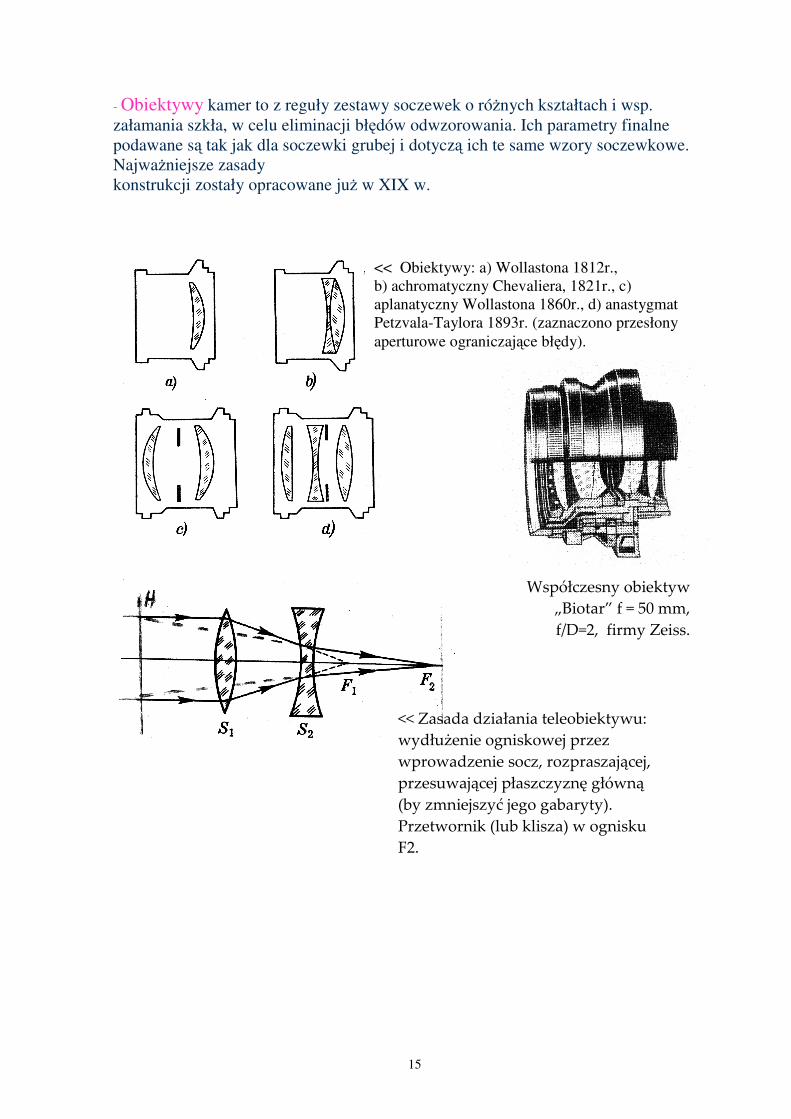
- Obiektywy kamer to z reguły zestawy soczewek o różnych kształtach i wsp.
załamania szkła, w celu eliminacji błędów odwzorowania. Ich parametry finalne
podawane są tak jak dla soczewki grubej i dotyczą ich te same wzory soczewkowe.
Najważniejsze zasady
konstrukcji zostały opracowane już w XIX w.
<< Obiektywy: a) Wollastona 1812r.,
b) achromatyczny Chevaliera, 1821r., c)
aplanatyczny Wollastona 1860r., d) anastygmat
Petzvala-Taylora 1893r. (zaznaczono przesłony
aperturowe ograniczające błędy).
Współczesny obiektyw
„Biotar” f = 50 mm,
f/D=2, firmy Zeiss.
<< Zasada działania teleobiektywu:
wydłużenie ogniskowej przez
wprowadzenie socz, rozpraszającej,
przesuwającej płaszczyznę główną
(by zmniejszyć jego gabaryty).
Przetwornik (lub klisza) w ognisku
F2.
16
9.2. Elementy i układy składające się na cyfrową kamerę wideo
(materiał z ćw. 9)
9.2.1. Obiektyw
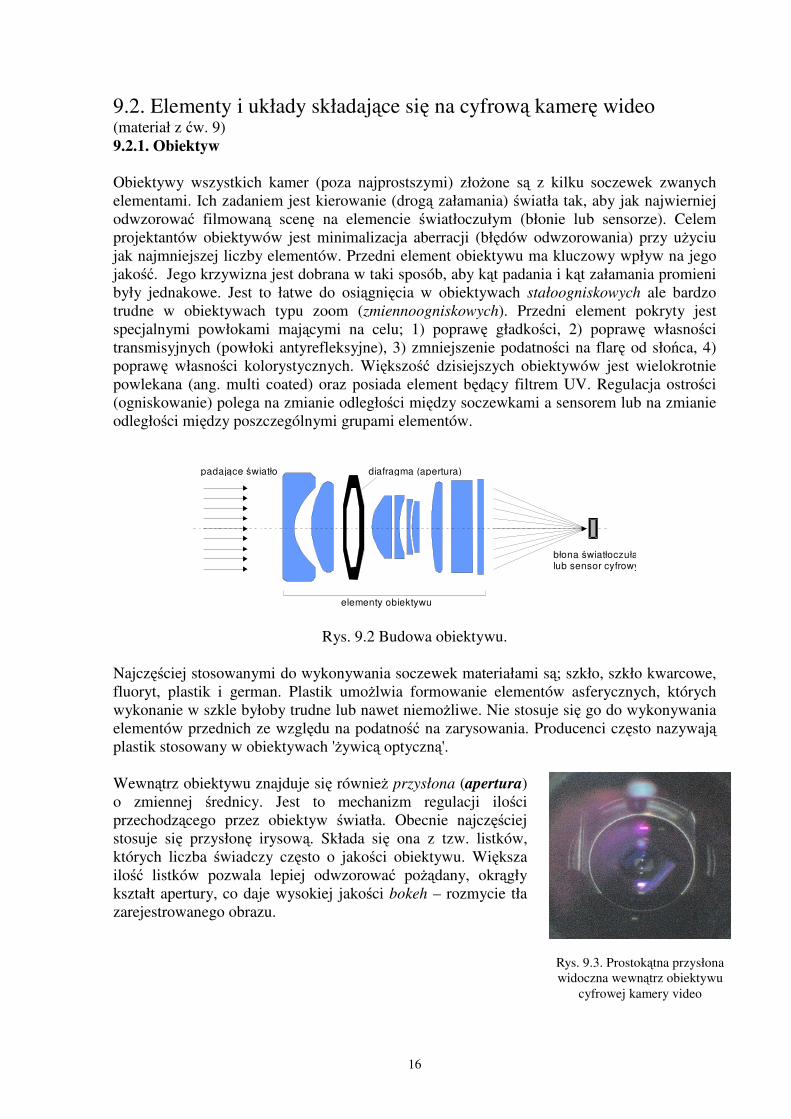
Obiektywy wszystkich kamer (poza najprostszymi) złożone są z kilku soczewek zwanych
elementami. Ich zadaniem jest kierowanie (drogą załamania) światła tak, aby jak najwierniej
odwzorować filmowaną scenę na elemencie światłoczułym (błonie lub sensorze). Celem
projektantów obiektywów jest minimalizacja aberracji (błędów odwzorowania) przy użyciu
jak najmniejszej liczby elementów. Przedni element obiektywu ma kluczowy wpływ na jego
jakość. Jego krzywizna jest dobrana w taki sposób, aby kąt padania i kąt załamania promieni
były jednakowe. Jest to łatwe do osiągnięcia w obiektywach stałoogniskowych ale bardzo
trudne w obiektywach typu zoom (zmiennoogniskowych). Przedni element pokryty jest
specjalnymi powłokami mającymi na celu; 1) poprawę gładkości, 2) poprawę własności
transmisyjnych (powłoki antyrefleksyjne), 3) zmniejszenie podatności na flarę od słońca, 4)
poprawę własności kolorystycznych. Większość dzisiejszych obiektywów jest wielokrotnie
powlekana (ang. multi coated) oraz posiada element będący filtrem UV. Regulacja ostrości
(ogniskowanie) polega na zmianie odległości między soczewkami a sensorem lub na zmianie
odległości między poszczególnymi grupami elementów.
padające światło diafragma (apertura)
błona światłoczułalub sensor cyfrowy
elementy obiektywu
Rys. 9.2 Budowa obiektywu.
Najczęściej stosowanymi do wykonywania soczewek materiałami są; szkło, szkło kwarcowe,
fluoryt, plastik i german. Plastik umożlwia formowanie elementów asferycznych, których
wykonanie w szkle byłoby trudne lub nawet niemożliwe. Nie stosuje się go do wykonywania
elementów przednich ze względu na podatność na zarysowania. Producenci często nazywają plastik stosowany w obiektywach 'żywicą optyczną'.
Wewnątrz obiektywu znajduje się również przysłona (apertura)
o zmiennej średnicy. Jest to mechanizm regulacji ilości
przechodzącego przez obiektyw światła. Obecnie najczęściej
stosuje się przysłonę irysową. Składa się ona z tzw. listków,
których liczba świadczy często o jakości obiektywu. Większa
ilość listków pozwala lepiej odwzorować pożądany, okrągły
kształt apertury, co daje wysokiej jakości bokeh – rozmycie tła
zarejestrowanego obrazu.
Rys. 9.3. Prostokątna przysłona
widoczna wewnątrz obiektywu
cyfrowej kamery video
17
Odległość ogniskowa (w skrócie ogniskowa): jest to odległość od płaszczyzny głównej
(przedmiotowej lub obrazowej) układu soczewek do skojarzonego z nią ogniska. W sytuacji
gdy obraz z kamery jest ostry, jej sensor znajduje się niemal w ognisku obiektywu. Odległość ogniskowa jest głównym parametrem obiektywu i nie zależy od rodzaju aparatu bądź kamery
do której jest zamocowany. Wyrażana jest w milimetrach [mm].
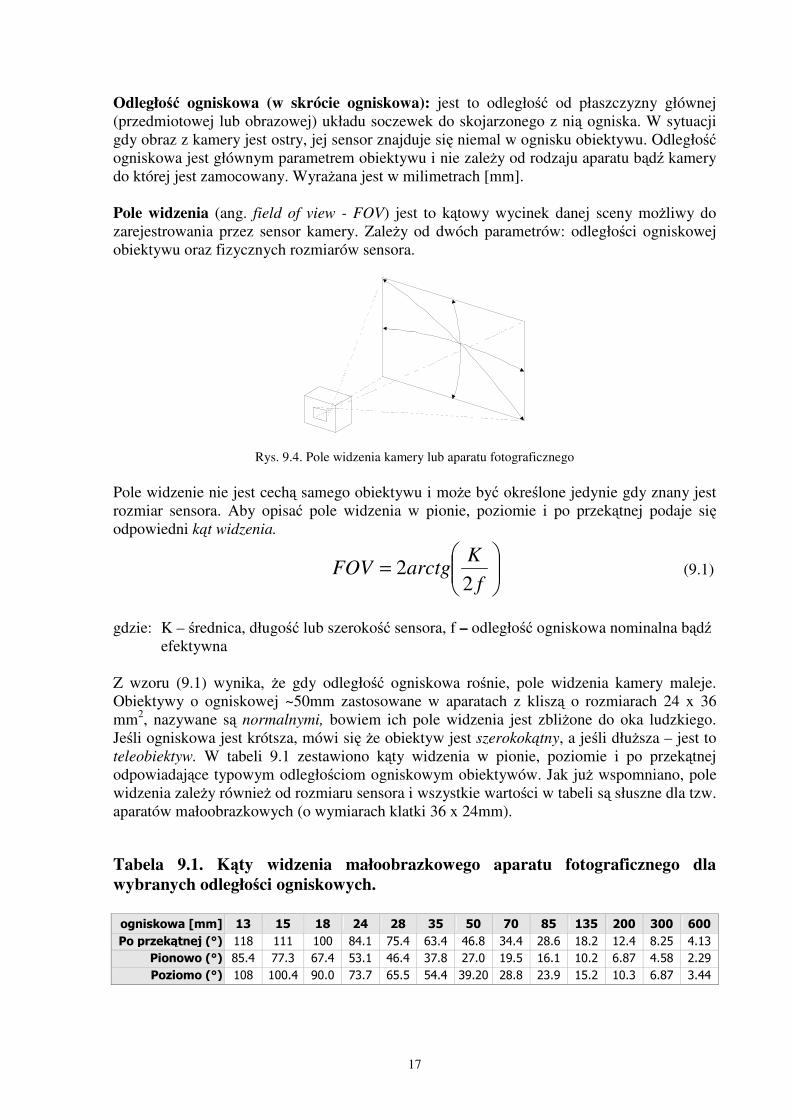
Pole widzenia (ang. field of view - FOV) jest to kątowy wycinek danej sceny możliwy do
zarejestrowania przez sensor kamery. Zależy od dwóch parametrów: odległości ogniskowej
obiektywu oraz fizycznych rozmiarów sensora.
Rys. 9.4. Pole widzenia kamery lub aparatu fotograficznego
Pole widzenie nie jest cechą samego obiektywu i może być określone jedynie gdy znany jest
rozmiar sensora. Aby opisać pole widzenia w pionie, poziomie i po przekątnej podaje się odpowiedni kąt widzenia.
=
f
KarctgFOV
22
gdzie: K – średnica, długość lub szerokość sensora, f – odległość ogniskowa nominalna bądź efektywna
Z wzoru (9.1) wynika, że gdy odległość ogniskowa rośnie, pole widzenia kamery maleje.
Obiektywy o ogniskowej ~50mm zastosowane w aparatach z kliszą o rozmiarach 24 x 36
mm2, nazywane są normalnymi, bowiem ich pole widzenia jest zbliżone do oka ludzkiego.
Jeśli ogniskowa jest krótsza, mówi się że obiektyw jest szerokokątny, a jeśli dłuższa – jest to
teleobiektyw. W tabeli 9.1 zestawiono kąty widzenia w pionie, poziomie i po przekątnej
odpowiadające typowym odległościom ogniskowym obiektywów. Jak już wspomniano, pole
widzenia zależy również od rozmiaru sensora i wszystkie wartości w tabeli są słuszne dla tzw.
aparatów małoobrazkowych (o wymiarach klatki 36 x 24mm).
Tabela 9.1. Kąty widzenia małoobrazkowego aparatu fotograficznego dla
wybranych odległości ogniskowych.
ogniskowa [mm] 13 15 18 24 28 35 50 70 85 135 200 300 600 Po przekątnej (°) 118 111 100 84.1 75.4 63.4 46.8 34.4 28.6 18.2 12.4 8.25 4.13
Pionowo (°) 85.4 77.3 67.4 53.1 46.4 37.8 27.0 19.5 16.1 10.2 6.87 4.58 2.29 Poziomo (°) 108 100.4 90.0 73.7 65.5 54.4 39.20 28.8 23.9 15.2 10.3 6.87 3.44
(9.1)
18
Ekwiwalentna odległość ogniskowa – jest to ogniskowa obiektywu aparatu
małoobrazkowego, przy której pole widzenia jest takie jak pole widzenia danej kamery (z
innym obiektywem i sensorem).
Przelicznik ogniskowej (ang. crop factor) – jest to współczynnik, który pomnożony przez
odległość ogniskową obiektywu danej kamery daje ekwiwalentną odległość ogniskową.
sensoradanegoprzekatna
owegomaloobrazkaparatukliszyklatkiprzekatnaogniskowejkprzeliczni =
Proporcje pojedynczej klatki kliszy aparatu małoobrazkowego (tzw. kliszy „35mm”) to 3:2
(36mm na 24mm), tymczasem wiele sensorów obecnie stosowanych w kamerach, ma
proporcje 4:3, lub 16:9. Dlatego też przelicznik wyznacza się dla przekątnej.
Jasność obiektywu – liczba F
Liczba F (określana potocznie mianem 'jasności') wyraża odległość ogniskową obiektywu w
odniesieniu do średnicy przysłony (tzw. apertury). Jest wielkością bezwymiarowa opisaną wzorem:
D
fF =
gdzie: f – odległość ogniskowa, D – średnica przysłony
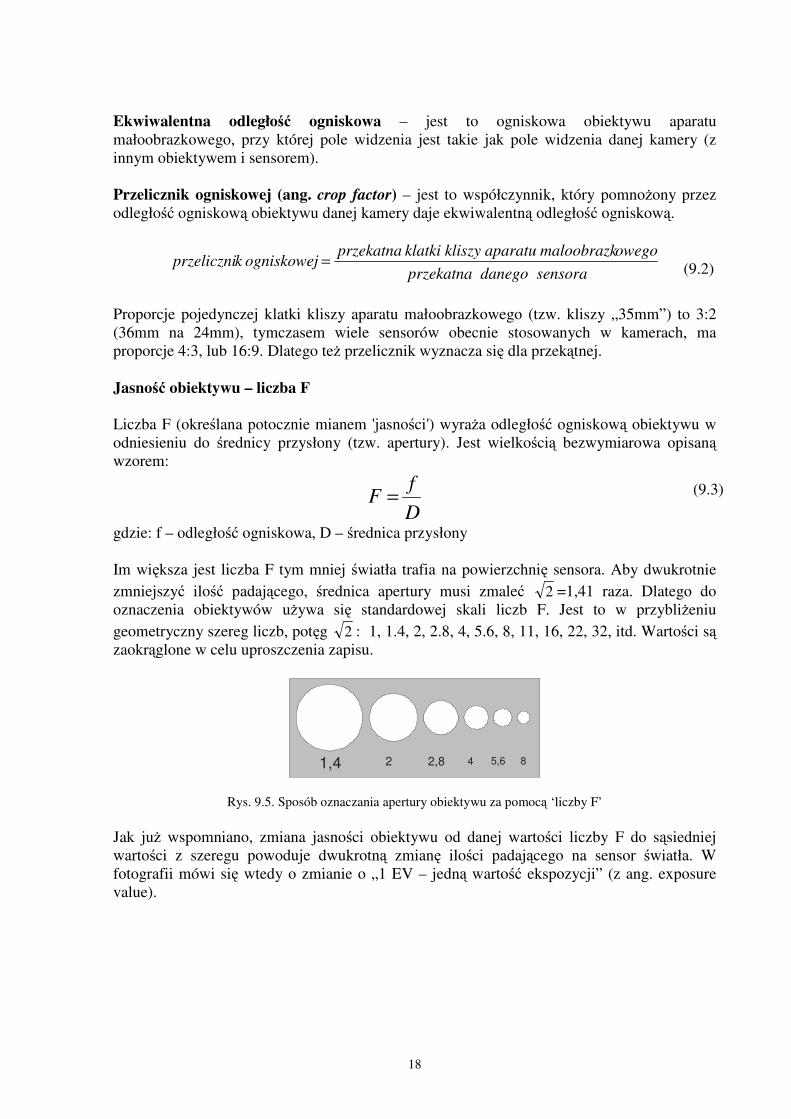
Im większa jest liczba F tym mniej światła trafia na powierzchnię sensora. Aby dwukrotnie
zmniejszyć ilość padającego, średnica apertury musi zmaleć 2 =1,41 raza. Dlatego do
oznaczenia obiektywów używa się standardowej skali liczb F. Jest to w przybliżeniu
geometryczny szereg liczb, potęg 2 : 1, 1.4, 2, 2.8, 4, 5.6, 8, 11, 16, 22, 32, itd. Wartości są zaokrąglone w celu uproszczenia zapisu.
1,4 2 2,8 4 5,6 8
Rys. 9.5. Sposób oznaczania apertury obiektywu za pomocą ‘liczby F’
Jak już wspomniano, zmiana jasności obiektywu od danej wartości liczby F do sąsiedniej
wartości z szeregu powoduje dwukrotną zmianę ilości padającego na sensor światła. W
fotografii mówi się wtedy o zmianie o „1 EV – jedną wartość ekspozycji” (z ang. exposure
value).
(9.3)
(9.2)
19
9.2.2. Migawka
W każdej kamerze konieczna jest możliwość kontrolowania czasu ekspozycji. W przypadku
aparatów fotograficznych z wyższej półki migawka jest mechaniczna i ma postać kurtyny
przesuwającej się w płaszczyźnie obrazowej nad powierzchnią sensora, pozwalając
precyzyjnie kontrolować czas naświetlania. W przypadku kamer cyfrowych migawka jest
najczęściej elektroniczna. Czas otwarcia migawki wyraża się w normalny sposób – w
sekundach, jednak wartości zapisuje się w postaci ułamków zwykłych; 1/25s, 1/320s,
1/4000s. W przypadku aparatów fotograficznych czas ten dobiera się indywidualnie przed
każdą ekspozycją. Kamera cyfrowa natomiast musi rejestrować sekwencje obrazów
utrzymując odpowiednie tempo – np. 25 klatek na sekundę. Czas otwarcia migawki nie może
w tym przypadku przekroczyć 1/25 sekundy. Układ automatycznej ekspozycji kamery dobiera
pozostałe parametry (aperturę obiektywu i czułość ISO sensora) w taki sposób, aby warunek
ten był spełniony.
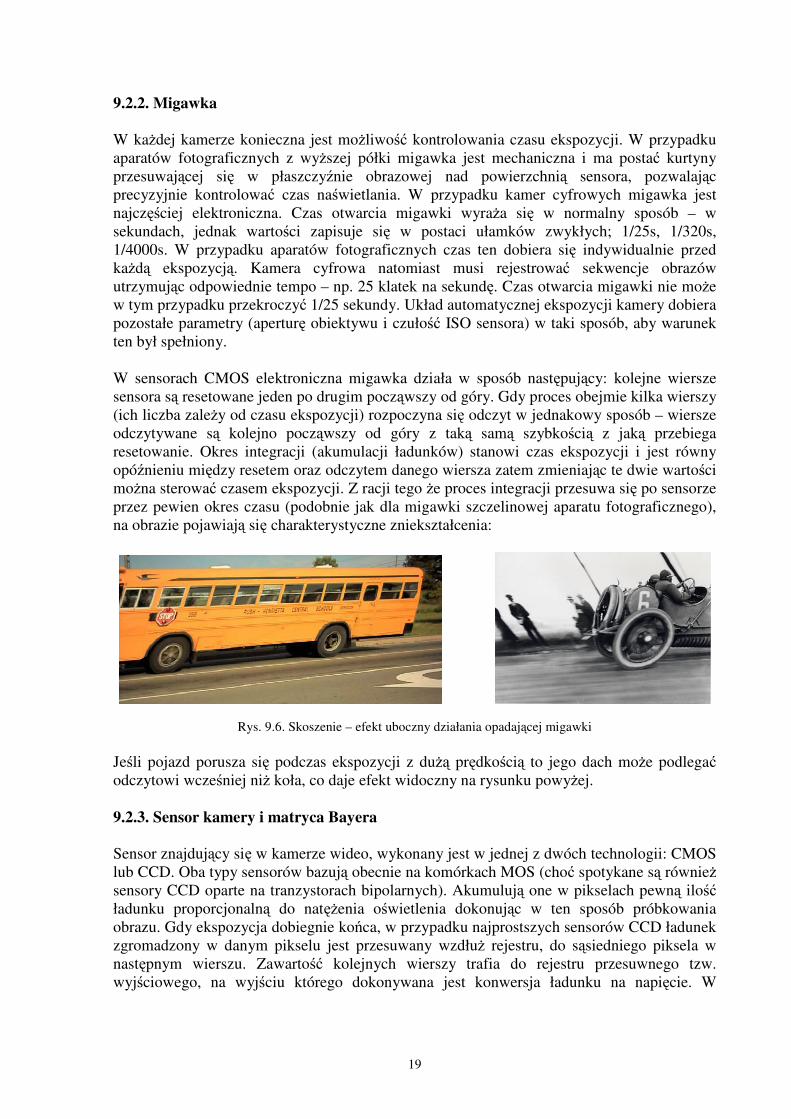
W sensorach CMOS elektroniczna migawka działa w sposób następujący: kolejne wiersze
sensora są resetowane jeden po drugim począwszy od góry. Gdy proces obejmie kilka wierszy
(ich liczba zależy od czasu ekspozycji) rozpoczyna się odczyt w jednakowy sposób – wiersze
odczytywane są kolejno począwszy od góry z taką samą szybkością z jaką przebiega
resetowanie. Okres integracji (akumulacji ładunków) stanowi czas ekspozycji i jest równy
opóźnieniu między resetem oraz odczytem danego wiersza zatem zmieniając te dwie wartości
można sterować czasem ekspozycji. Z racji tego że proces integracji przesuwa się po sensorze
przez pewien okres czasu (podobnie jak dla migawki szczelinowej aparatu fotograficznego),
na obrazie pojawiają się charakterystyczne zniekształcenia:
Rys. 9.6. Skoszenie – efekt uboczny działania opadającej migawki
Jeśli pojazd porusza się podczas ekspozycji z dużą prędkością to jego dach może podlegać odczytowi wcześniej niż koła, co daje efekt widoczny na rysunku powyżej.
9.2.3. Sensor kamery i matryca Bayera
Sensor znajdujący się w kamerze wideo, wykonany jest w jednej z dwóch technologii: CMOS
lub CCD. Oba typy sensorów bazują obecnie na komórkach MOS (choć spotykane są również sensory CCD oparte na tranzystorach bipolarnych). Akumulują one w pikselach pewną ilość ładunku proporcjonalną do natężenia oświetlenia dokonując w ten sposób próbkowania
obrazu. Gdy ekspozycja dobiegnie końca, w przypadku najprostszych sensorów CCD ładunek
zgromadzony w danym pikselu jest przesuwany wzdłuż rejestru, do sąsiedniego piksela w
następnym wierszu. Zawartość kolejnych wierszy trafia do rejestru przesuwnego tzw.
wyjściowego, na wyjściu którego dokonywana jest konwersja ładunku na napięcie. W
20
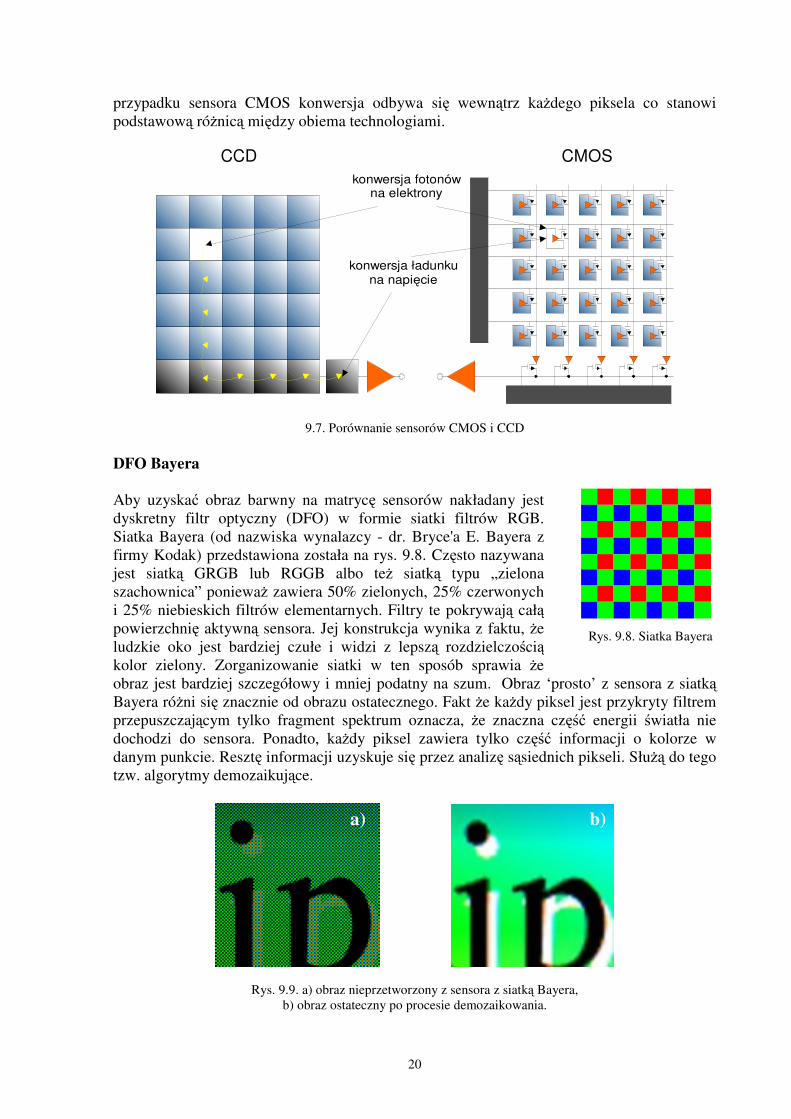
przypadku sensora CMOS konwersja odbywa się wewnątrz każdego piksela co stanowi
podstawową różnicą między obiema technologiami.
CCD CMOS
konwersja fotonówna elektrony
konwersja ładunkuna napięcie
9.7. Porównanie sensorów CMOS i CCD
DFO Bayera
Aby uzyskać obraz barwny na matrycę sensorów nakładany jest
dyskretny filtr optyczny (DFO) w formie siatki filtrów RGB.
Siatka Bayera (od nazwiska wynalazcy - dr. Bryce'a E. Bayera z
firmy Kodak) przedstawiona została na rys. 9.8. Często nazywana
jest siatką GRGB lub RGGB albo też siatką typu „zielona
szachownica” ponieważ zawiera 50% zielonych, 25% czerwonych
i 25% niebieskich filtrów elementarnych. Filtry te pokrywają całą powierzchnię aktywną sensora. Jej konstrukcja wynika z faktu, że
ludzkie oko jest bardziej czułe i widzi z lepszą rozdzielczością kolor zielony. Zorganizowanie siatki w ten sposób sprawia że
obraz jest bardziej szczegółowy i mniej podatny na szum. Obraz ‘prosto’ z sensora z siatką Bayera różni się znacznie od obrazu ostatecznego. Fakt że każdy piksel jest przykryty filtrem
przepuszczającym tylko fragment spektrum oznacza, że znaczna część energii światła nie
dochodzi do sensora. Ponadto, każdy piksel zawiera tylko część informacji o kolorze w
danym punkcie. Resztę informacji uzyskuje się przez analizę sąsiednich pikseli. Służą do tego
tzw. algorytmy demozaikujące.
Rys. 9.9. a) obraz nieprzetworzony z sensora z siatką Bayera,
b) obraz ostateczny po procesie demozaikowania.
Rys. 9.8. Siatka Bayera
a) b)
21
Istnieje wiele typów algorytmów demozaikujących: najbliższego sąsiada, interpolacji
dwuliniowej, interpolacji dwusześciennej itd. Różnią się one szybkością działania, jakością i zastosowaniem (np. dany algorytm może być zoptymalizowany pod kątem lepszej jakości
wydruku).
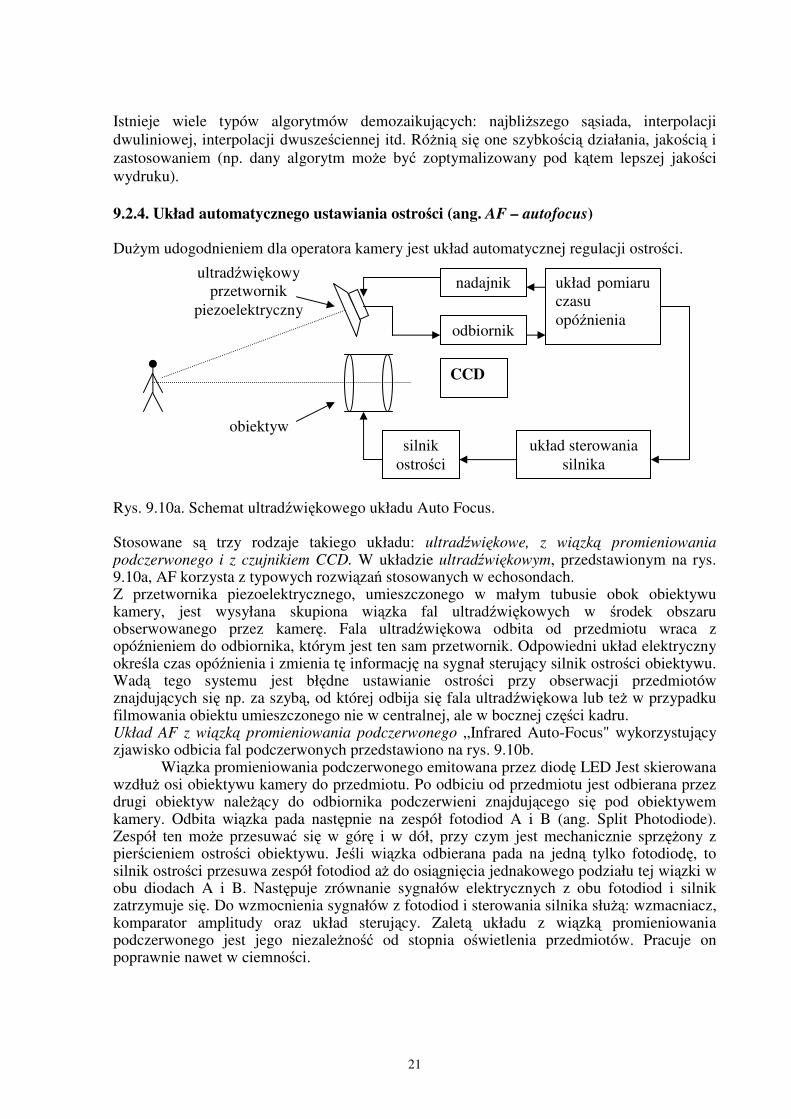
9.2.4. Układ automatycznego ustawiania ostrości (ang. AF – autofocus) Dużym udogodnieniem dla operatora kamery jest układ automatycznej regulacji ostrości. Rys. 9.10a. Schemat ultradźwiękowego układu Auto Focus. Stosowane są trzy rodzaje takiego układu: ultradźwiękowe, z wiązką promieniowania podczerwonego i z czujnikiem CCD. W układzie ultradźwiękowym, przedstawionym na rys. 9.10a, AF korzysta z typowych rozwiązań stosowanych w echosondach. Z przetwornika piezoelektrycznego, umieszczonego w małym tubusie obok obiektywu kamery, jest wysyłana skupiona wiązka fal ultradźwiękowych w środek obszaru obserwowanego przez kamerę. Fala ultradźwiękowa odbita od przedmiotu wraca z opóźnieniem do odbiornika, którym jest ten sam przetwornik. Odpowiedni układ elektryczny określa czas opóźnienia i zmienia tę informację na sygnał sterujący silnik ostrości obiektywu. Wadą tego systemu jest błędne ustawianie ostrości przy obserwacji przedmiotów znajdujących się np. za szybą, od której odbija się fala ultradźwiękowa lub też w przypadku filmowania obiektu umieszczonego nie w centralnej, ale w bocznej części kadru. Układ AF z wiązką promieniowania podczerwonego „Infrared Auto-Focus" wykorzystujący zjawisko odbicia fal podczerwonych przedstawiono na rys. 9.10b.
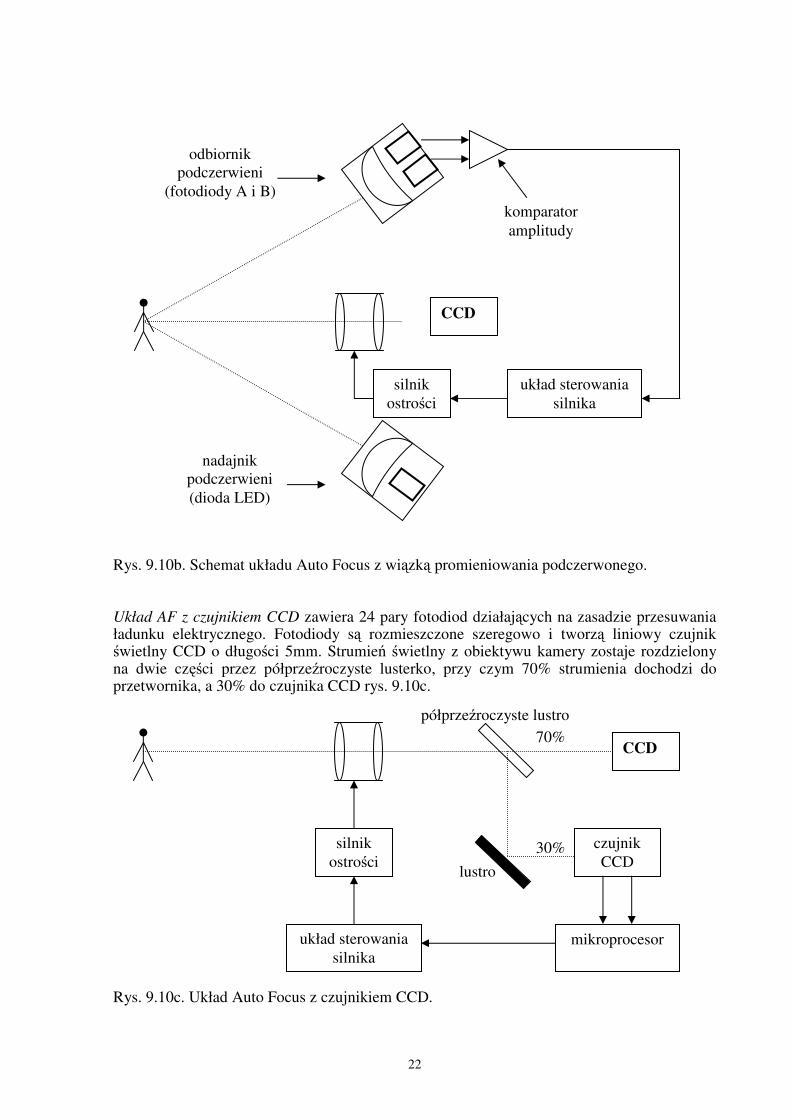
Wiązka promieniowania podczerwonego emitowana przez diodę LED Jest skierowana wzdłuż osi obiektywu kamery do przedmiotu. Po odbiciu od przedmiotu jest odbierana przez drugi obiektyw należący do odbiornika podczerwieni znajdującego się pod obiektywem kamery. Odbita wiązka pada następnie na zespół fotodiod A i B (ang. Split Photodiode). Zespół ten może przesuwać się w górę i w dół, przy czym jest mechanicznie sprzężony z pierścieniem ostrości obiektywu. Jeśli wiązka odbierana pada na jedną tylko fotodiodę, to silnik ostrości przesuwa zespół fotodiod aż do osiągnięcia jednakowego podziału tej wiązki w obu diodach A i B. Następuje zrównanie sygnałów elektrycznych z obu fotodiod i silnik zatrzymuje się. Do wzmocnienia sygnałów z fotodiod i sterowania silnika służą: wzmacniacz, komparator amplitudy oraz układ sterujący. Zaletą układu z wiązką promieniowania podczerwonego jest jego niezależność od stopnia oświetlenia przedmiotów. Pracuje on poprawnie nawet w ciemności.
CCD
silnik
ostrości
układ sterowania
silnika
nadajnik
odbiornik
układ pomiaru
czasu
opóźnienia
ultradźwiękowy
przetwornik
piezoelektryczny
obiektyw
22
Rys. 9.10b. Schemat układu Auto Focus z wiązką promieniowania podczerwonego. Układ AF z czujnikiem CCD zawiera 24 pary fotodiod działających na zasadzie przesuwania ładunku elektrycznego. Fotodiody są rozmieszczone szeregowo i tworzą liniowy czujnik świetlny CCD o długości 5mm. Strumień świetlny z obiektywu kamery zostaje rozdzielony na dwie części przez półprzeźroczyste lusterko, przy czym 70% strumienia dochodzi do przetwornika, a 30% do czujnika CCD rys. 9.10c. Rys. 9.10c. Układ Auto Focus z czujnikiem CCD.
CCD
silnik
ostrości
układ sterowania
silnika
odbiornik
podczerwieni
(fotodiody A i B)
nadajnik
podczerwieni
(dioda LED)
komparator
amplitudy
CCD
silnik
ostrości
układ sterowania
silnika
mikroprocesor
czujnik
CCD
półprzeźroczyste lustro
lustro
70%
30%
23
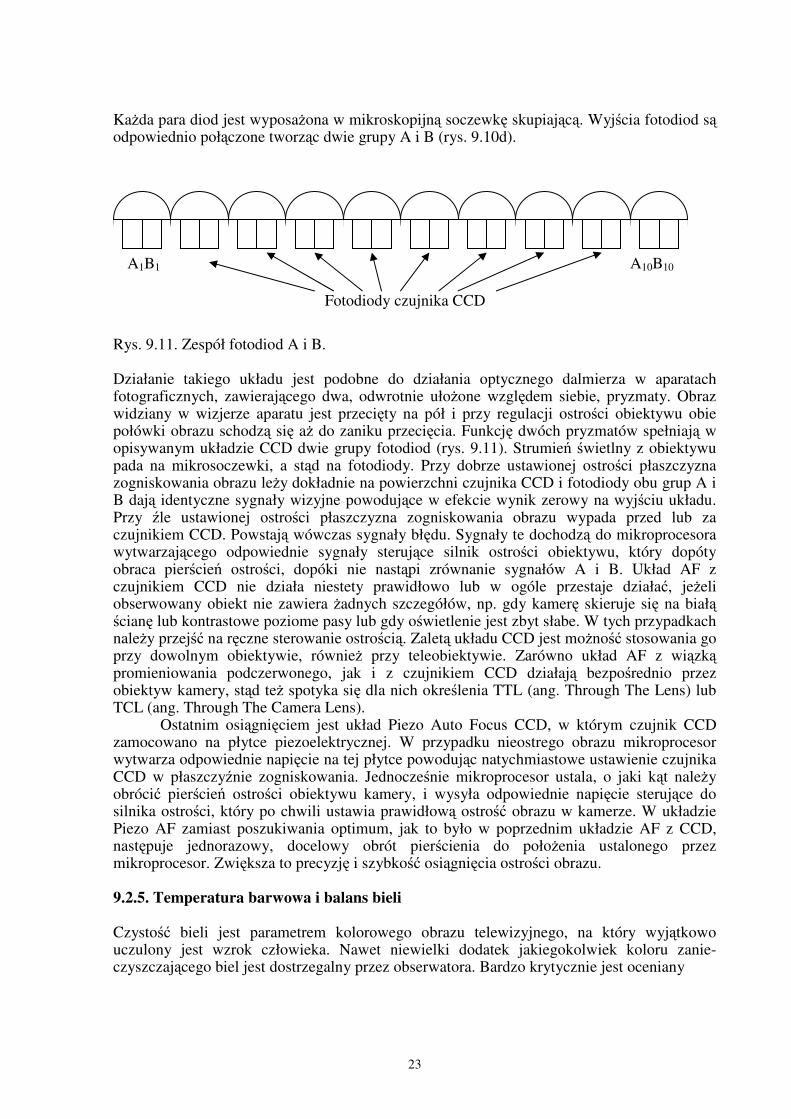
Każda para diod jest wyposażona w mikroskopijną soczewkę skupiającą. Wyjścia fotodiod są odpowiednio połączone tworząc dwie grupy A i B (rys. 9.10d). Rys. 9.11. Zespół fotodiod A i B. Działanie takiego układu jest podobne do działania optycznego dalmierza w aparatach fotograficznych, zawierającego dwa, odwrotnie ułożone względem siebie, pryzmaty. Obraz widziany w wizjerze aparatu jest przecięty na pół i przy regulacji ostrości obiektywu obie połówki obrazu schodzą się aż do zaniku przecięcia. Funkcję dwóch pryzmatów spełniają w opisywanym układzie CCD dwie grupy fotodiod (rys. 9.11). Strumień świetlny z obiektywu pada na mikrosoczewki, a stąd na fotodiody. Przy dobrze ustawionej ostrości płaszczyzna zogniskowania obrazu leży dokładnie na powierzchni czujnika CCD i fotodiody obu grup A i B dają identyczne sygnały wizyjne powodujące w efekcie wynik zerowy na wyjściu układu. Przy źle ustawionej ostrości płaszczyzna zogniskowania obrazu wypada przed lub za czujnikiem CCD. Powstają wówczas sygnały błędu. Sygnały te dochodzą do mikroprocesora wytwarzającego odpowiednie sygnały sterujące silnik ostrości obiektywu, który dopóty obraca pierścień ostrości, dopóki nie nastąpi zrównanie sygnałów A i B. Układ AF z czujnikiem CCD nie działa niestety prawidłowo lub w ogóle przestaje działać, jeżeli obserwowany obiekt nie zawiera żadnych szczegółów, np. gdy kamerę skieruje się na białą ścianę lub kontrastowe poziome pasy lub gdy oświetlenie jest zbyt słabe. W tych przypadkach należy przejść na ręczne sterowanie ostrością. Zaletą układu CCD jest możność stosowania go przy dowolnym obiektywie, również przy teleobiektywie. Zarówno układ AF z wiązką promieniowania podczerwonego, jak i z czujnikiem CCD działają bezpośrednio przez obiektyw kamery, stąd też spotyka się dla nich określenia TTL (ang. Through The Lens) lub TCL (ang. Through The Camera Lens). Ostatnim osiągnięciem jest układ Piezo Auto Focus CCD, w którym czujnik CCD zamocowano na płytce piezoelektrycznej. W przypadku nieostrego obrazu mikroprocesor wytwarza odpowiednie napięcie na tej płytce powodując natychmiastowe ustawienie czujnika CCD w płaszczyźnie zogniskowania. Jednocześnie mikroprocesor ustala, o jaki kąt należy obrócić pierścień ostrości obiektywu kamery, i wysyła odpowiednie napięcie sterujące do silnika ostrości, który po chwili ustawia prawidłową ostrość obrazu w kamerze. W układzie Piezo AF zamiast poszukiwania optimum, jak to było w poprzednim układzie AF z CCD, następuje jednorazowy, docelowy obrót pierścienia do położenia ustalonego przez mikroprocesor. Zwiększa to precyzję i szybkość osiągnięcia ostrości obrazu. 9.2.5. Temperatura barwowa i balans bieli Czystość bieli jest parametrem kolorowego obrazu telewizyjnego, na który wyjątkowo uczulony jest wzrok człowieka. Nawet niewielki dodatek jakiegokolwiek koloru zanie-czyszczającego biel jest dostrzegalny przez obserwatora. Bardzo krytycznie jest oceniany
A1B1 A10B10
Fotodiody czujnika CCD

24
Tabela 9.2. Temperatury barwowe typowych źródeł światła
Oznaczenie Temperatura barwowa [K]
Źródło światła
10000 9000
Czyste niebieskie niebo
8000
7000
Zachmurzone niebo
6000 Letni dzień, południe. Lampy
błyskowe. 5000 Ranek lub wieczór
4000 Świetlówka fluorescencyjna
3000 Żarówki halogenowe i wolframowe
2000 1000
Ogień, świece
także kolor skóry na twarzy, rękach itp. Prawidłowe odtwarzanie bieli przez kamerę telewizyjną daje równocześnie poprawne odtwarzanie wszystkich kolorów. Główny zatem wpływ na czystość bieli w kamerze ma wyrównanie poziomów u trzech składowych sygnałów RGB. Stąd też pochodzi określenie równowaga bieli (ang. White Balance). Podobnie jak w kolorowej fotografii, uzyskanie wiernego odtworzenia kolorów oraz prawidłowej bieli zależy od zabarwienia światła oświetlającego filmowaną scenę. Parametrem charakteryzującym to zabarwienie jest temperatura barwowa. Temperatura barwowa określa odcień bieli i jest wyrażana w Kelvinach. Odpowiada ona temperaturze do której należy podgrzać ('do białości') ciało doskonale czarne aby emitowało białe światło o danym odcieniu. Nieco na przekór intuicji; wyższe temperatury barwowe (>5000K) reprezentują kolory 'chłodne', niższe natomiast (2700-3000K) – ciepłe. Im jest ona niższa, tym światło pozornie białe jest bardziej zabarwione kolorem czerwonym, a im wyższa - kolorem niebieskim. Dla porównania w Tab. 9.2 podano temperatury barwowe kilku znanych ogólnie źródeł światła.
Z przytoczonych przykładów widać, z jak dużą rozpiętością temperatury barwowej może spotkać się kamera telewizyjna. Aby dobrać w kamerze właściwą równowagę bieli przy aktualnym oświetleniu, stosuje się układy ręcznej lub automatycznej regulacji. Dawniej, w tanich kamerach, dla uproszczenia, używany był
przełącznik np. dla 4 różnych warunków: oświetlenie żarowe, świetlówka, słońce, niebo zachmurzone.
Rozwiązanie takie dawało tylko przybliżone wyniki i nie zapewniało prawidłowej równowagi bieli dla
dowolnego oświetlenia. Zwiększenie dokładności ustawienia równowagi bieli zapewnia układ automatyki, który
samoczynnie dobiera tę równowagę po skierowaniu kamery na białą powierzchnię, np. ścianę, kartkę papieru itp.
i naciśnięciu przycisku układu automatyki równowagi bieli w kamerze.
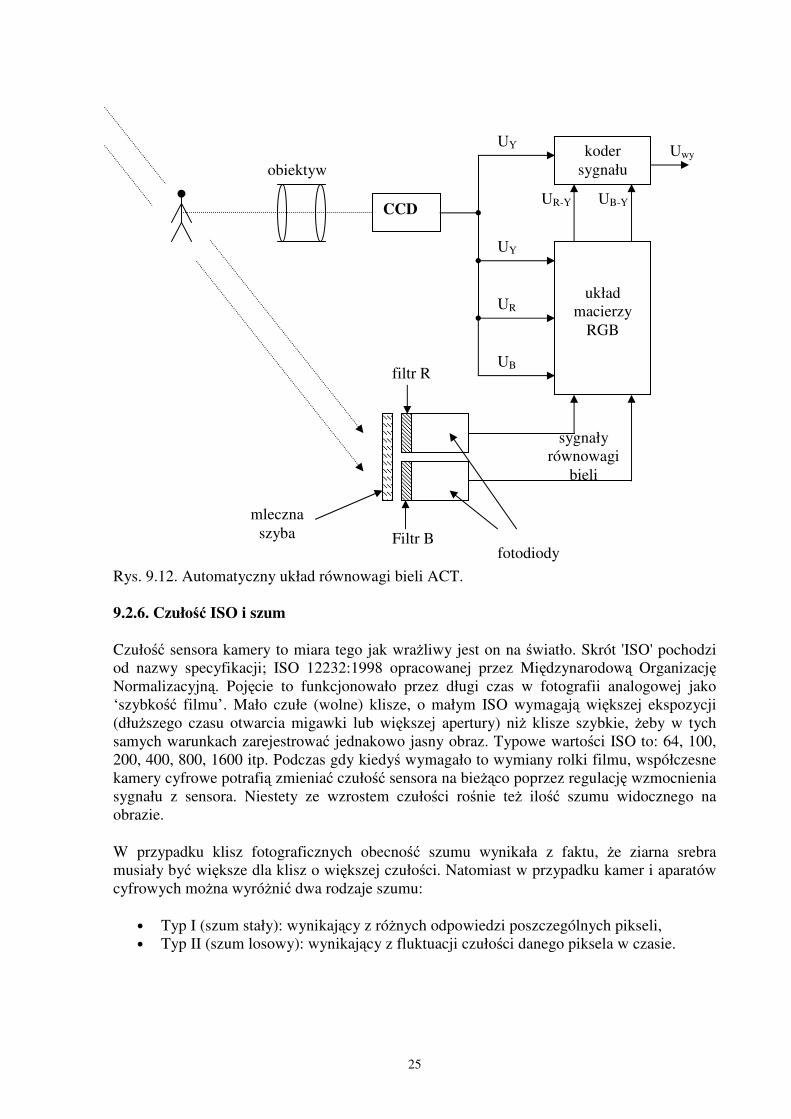
Aby zwolnić operatora kamery z obowiązku pamiętania o konieczności korygowania równowagi bieli, wprowadzono układ ACT (ang. Auto Colour Tracking) przedstawiony na rys. 9.12. Działa on w sposób ciągły, nawet bez konieczności przerywania nagrań przy przechodzeniu z oświetlenia np. słonecznego na elektryczne. Półprzewodnikowy czujnik kolorów ma dwie fotodiody, jedną czułą na światło o odcieniu niebieskim, a drugą, o odcieniu czerwonym. Czujnik ten analizuje nieustannie dochodzące do niego światło i przenosi dane do układu macierzowego RGB, który automatycznie koryguje równowagę bieli. Układ ACT działa podobnie jak zmysł wzroku, dzięki któremu można rozpoznawać kolory przedmiotów przy różnym zabarwieniu oświetlenia.
25
Rys. 9.12. Automatyczny układ równowagi bieli ACT.
9.2.6. Czułość ISO i szum
Czułość sensora kamery to miara tego jak wrażliwy jest on na światło. Skrót 'ISO' pochodzi
od nazwy specyfikacji; ISO 12232:1998 opracowanej przez Międzynarodową Organizację Normalizacyjną. Pojęcie to funkcjonowało przez długi czas w fotografii analogowej jako
‘szybkość filmu’. Mało czułe (wolne) klisze, o małym ISO wymagają większej ekspozycji
(dłuższego czasu otwarcia migawki lub większej apertury) niż klisze szybkie, żeby w tych
samych warunkach zarejestrować jednakowo jasny obraz. Typowe wartości ISO to: 64, 100,
200, 400, 800, 1600 itp. Podczas gdy kiedyś wymagało to wymiany rolki filmu, współczesne
kamery cyfrowe potrafią zmieniać czułość sensora na bieżąco poprzez regulację wzmocnienia
sygnału z sensora. Niestety ze wzrostem czułości rośnie też ilość szumu widocznego na
obrazie.
W przypadku klisz fotograficznych obecność szumu wynikała z faktu, że ziarna srebra
musiały być większe dla klisz o większej czułości. Natomiast w przypadku kamer i aparatów
cyfrowych można wyróżnić dwa rodzaje szumu:
• Typ I (szum stały): wynikający z różnych odpowiedzi poszczególnych pikseli,
• Typ II (szum losowy): wynikający z fluktuacji czułości danego piksela w czasie.
CCD
UY
układ
macierzy
RGB
koder
sygnału
UY
UR
UB
UR-Y UB-Y
Uwy
filtr R
Filtr B fotodiody
sygnały
równowagi
bieli
mleczna
szyba
obiektyw
26
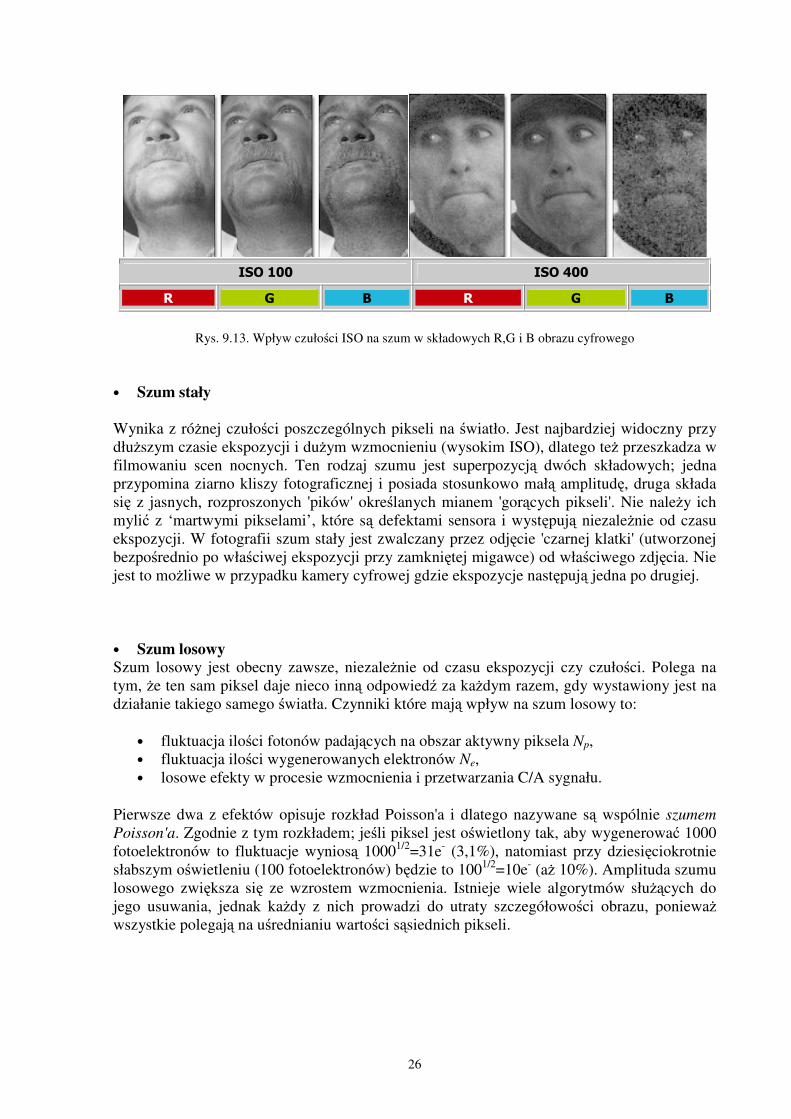
ISO 100 ISO 400
R G B R G B
Rys. 9.13. Wpływ czułości ISO na szum w składowych R,G i B obrazu cyfrowego
• Szum stały
Wynika z różnej czułości poszczególnych pikseli na światło. Jest najbardziej widoczny przy
dłuższym czasie ekspozycji i dużym wzmocnieniu (wysokim ISO), dlatego też przeszkadza w
filmowaniu scen nocnych. Ten rodzaj szumu jest superpozycją dwóch składowych; jedna
przypomina ziarno kliszy fotograficznej i posiada stosunkowo małą amplitudę, druga składa
się z jasnych, rozproszonych 'pików' określanych mianem 'gorących pikseli'. Nie należy ich
mylić z ‘martwymi pikselami’, które są defektami sensora i występują niezależnie od czasu
ekspozycji. W fotografii szum stały jest zwalczany przez odjęcie 'czarnej klatki' (utworzonej
bezpośrednio po właściwej ekspozycji przy zamkniętej migawce) od właściwego zdjęcia. Nie
jest to możliwe w przypadku kamery cyfrowej gdzie ekspozycje następują jedna po drugiej.
• Szum losowy Szum losowy jest obecny zawsze, niezależnie od czasu ekspozycji czy czułości. Polega na
tym, że ten sam piksel daje nieco inną odpowiedź za każdym razem, gdy wystawiony jest na
działanie takiego samego światła. Czynniki które mają wpływ na szum losowy to:
• fluktuacja ilości fotonów padających na obszar aktywny piksela Np,
• fluktuacja ilości wygenerowanych elektronów Ne,
• losowe efekty w procesie wzmocnienia i przetwarzania C/A sygnału.
Pierwsze dwa z efektów opisuje rozkład Poisson'a i dlatego nazywane są wspólnie szumem
Poisson'a. Zgodnie z tym rozkładem; jeśli piksel jest oświetlony tak, aby wygenerować 1000
fotoelektronów to fluktuacje wyniosą 10001/2
=31e- (3,1%), natomiast przy dziesięciokrotnie
słabszym oświetleniu (100 fotoelektronów) będzie to 1001/2
=10e- (aż 10%). Amplituda szumu
losowego zwiększa się ze wzrostem wzmocnienia. Istnieje wiele algorytmów służących do
jego usuwania, jednak każdy z nich prowadzi do utraty szczegółowości obrazu, ponieważ wszystkie polegają na uśrednianiu wartości sąsiednich pikseli.
27
9.3. Rozdzielczość
9.3.1. Podstawowe pojęcia
Kamera wideo jest przykładem systemu analizującego obraz. Dokonuje ona próbkowania
rejestrowanej sceny w czasie (w tempie np. 25 klatek na sekundę) oraz w przestrzeni. Ta
druga operacja polega na przyporządkowywaniu poszczególnym punktom obrazowym –
pikselom (znajdującym się w płaszczyźnie obrazowej, na powierzchni sensora) odpowiednich
punktów przedmiotowych.
Zdolność rozdzielcza analizatora obrazu to jego zdolność do rozróżniania (rozdzielania)
szczegółów przedmiotu, innymi słowy zdolność do mierzenia kątowej separacji punktów
przedmiotowych.
Rozdzielczość jest to minimalna odległość pomiędzy dwoma rozróżnialnymi elementami
obrazu. Nie należy jej utożsamiać z liczbą pikseli sensora, ponieważ rzadko kiedy jest on
‘najwęższym gardłem’ całego systemu.
9.3.2. Dyfrakcja – zjawisko ograniczające rozdzielczość
Jakość obiektywu ma kluczowe znaczenie dla rozdzielczości całego systemu. Dla dużych
apertur (np. 1, 1.8, itp...) maksymalna rozdzielczość obiektywu ograniczają aberracje. W
przypadku mniejszych apertur i obiektywów bardzo wysokiej jakości (takich gdzie aberracje
są kompensowane np. z pomocą soczewek asferycznych i/lub o niskiej dyspersji)
ograniczenie rozdzielczości wynika z dyfrakcji.
Równoległe promienie światła przechodzące przez aperturę rozchodzą się i interferują ze
sobą, ponieważ w drodze do ekranu przebywają różne odległości i występują między nimi
przesunięcia fazowe.
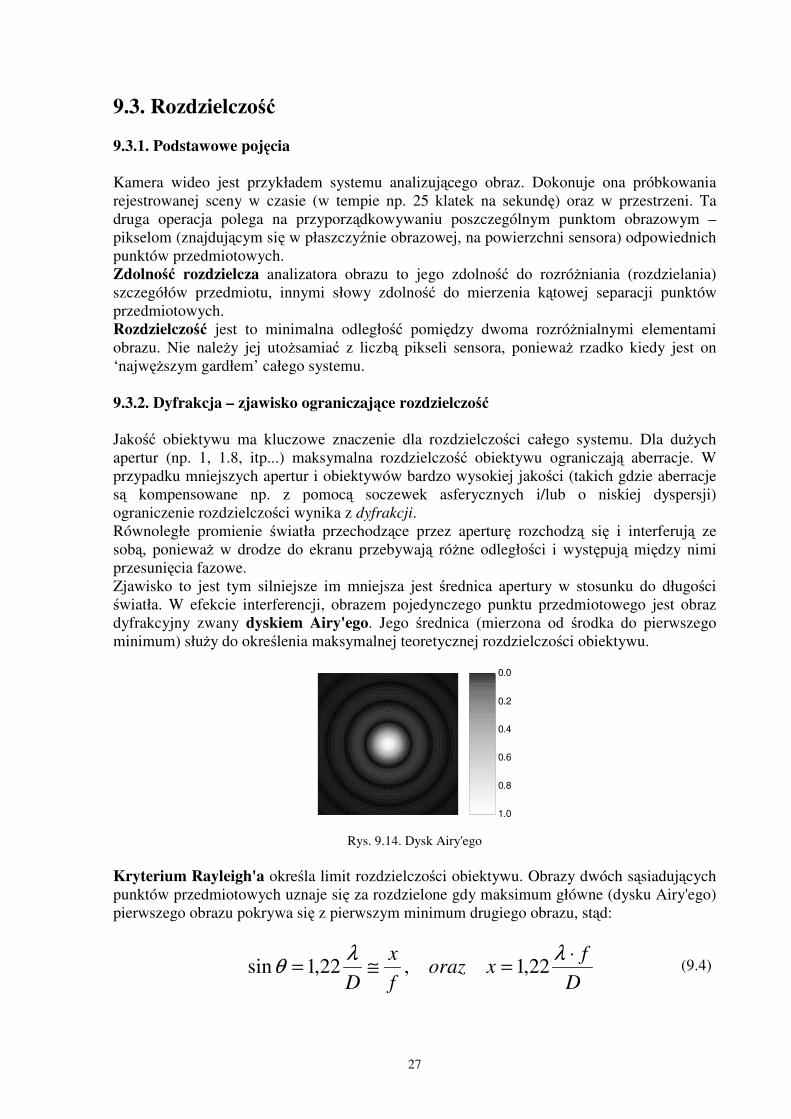
Zjawisko to jest tym silniejsze im mniejsza jest średnica apertury w stosunku do długości
światła. W efekcie interferencji, obrazem pojedynczego punktu przedmiotowego jest obraz
dyfrakcyjny zwany dyskiem Airy'ego. Jego średnica (mierzona od środka do pierwszego
minimum) służy do określenia maksymalnej teoretycznej rozdzielczości obiektywu.
0.0
0.2
0.4
0.6
0.8
1.0
Rys. 9.14. Dysk Airy'ego
Kryterium Rayleigh'a określa limit rozdzielczości obiektywu. Obrazy dwóch sąsiadujących
punktów przedmiotowych uznaje się za rozdzielone gdy maksimum główne (dysku Airy'ego)
pierwszego obrazu pokrywa się z pierwszym minimum drugiego obrazu, stąd:
D
fxoraz
f
x
D
⋅=≅=
λλθ 22,1,22,1sin
(9.4)
28
gdzie: θ – rozdzielczość kątowa, x - odległość dwóch dysków Airy’ego na ekranie, f –
odległość ogniskowa, D – apertura (średnica przesłony). Odległość ‘x’ odpowiada rozmiarowi najmniejszego przedmiotu który obiektyw jest w
stanie odwzorować. Jest to również średnica najmniejszego punktu do którego obiektyw jest w
stanie zogniskować skolimowaną wiązkę światła. Wielkość ta jest proporcjonalna do długości fali
λ, zatem niebieskie światło może zostać zogniskowane do mniejszego punktu niż czerwone.
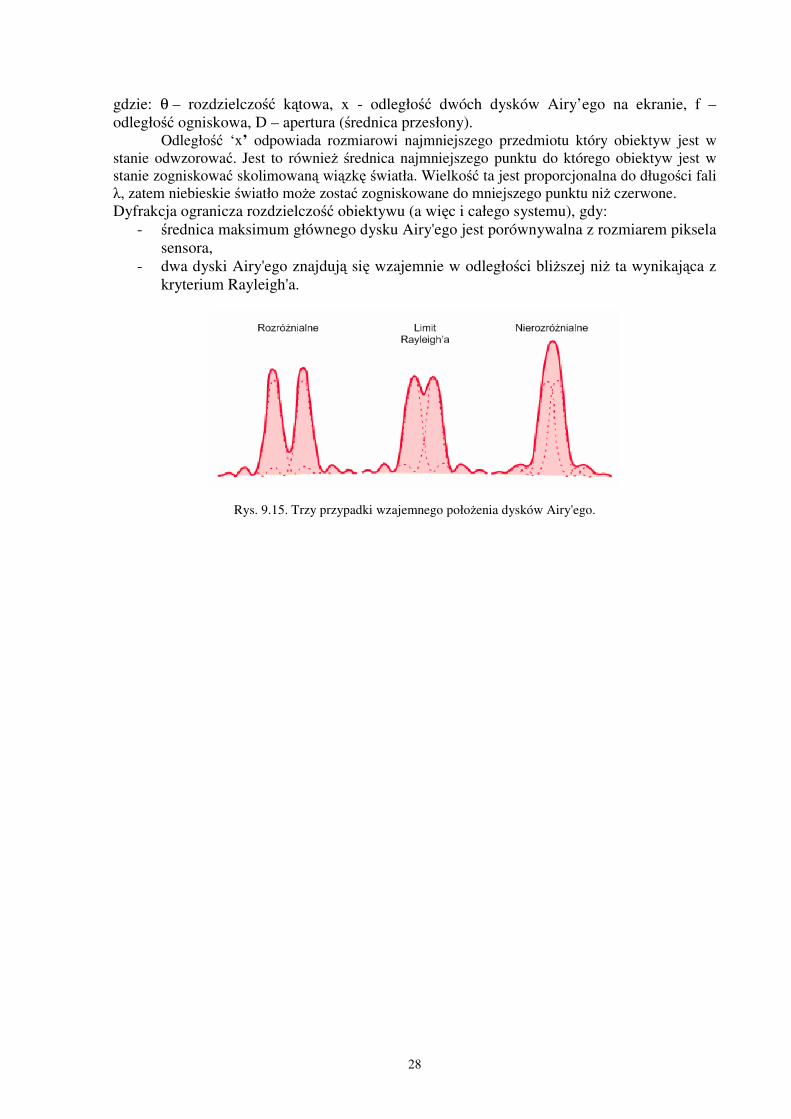
Dyfrakcja ogranicza rozdzielczość obiektywu (a więc i całego systemu), gdy:
- średnica maksimum głównego dysku Airy'ego jest porównywalna z rozmiarem piksela
sensora,
- dwa dyski Airy'ego znajdują się wzajemnie w odległości bliższej niż ta wynikająca z
kryterium Rayleigh'a.
Rys. 9.15. Trzy przypadki wzajemnego położenia dysków Airy'ego.
29
11.5 Stanowisko pomiarowe i metodyka pomiarów
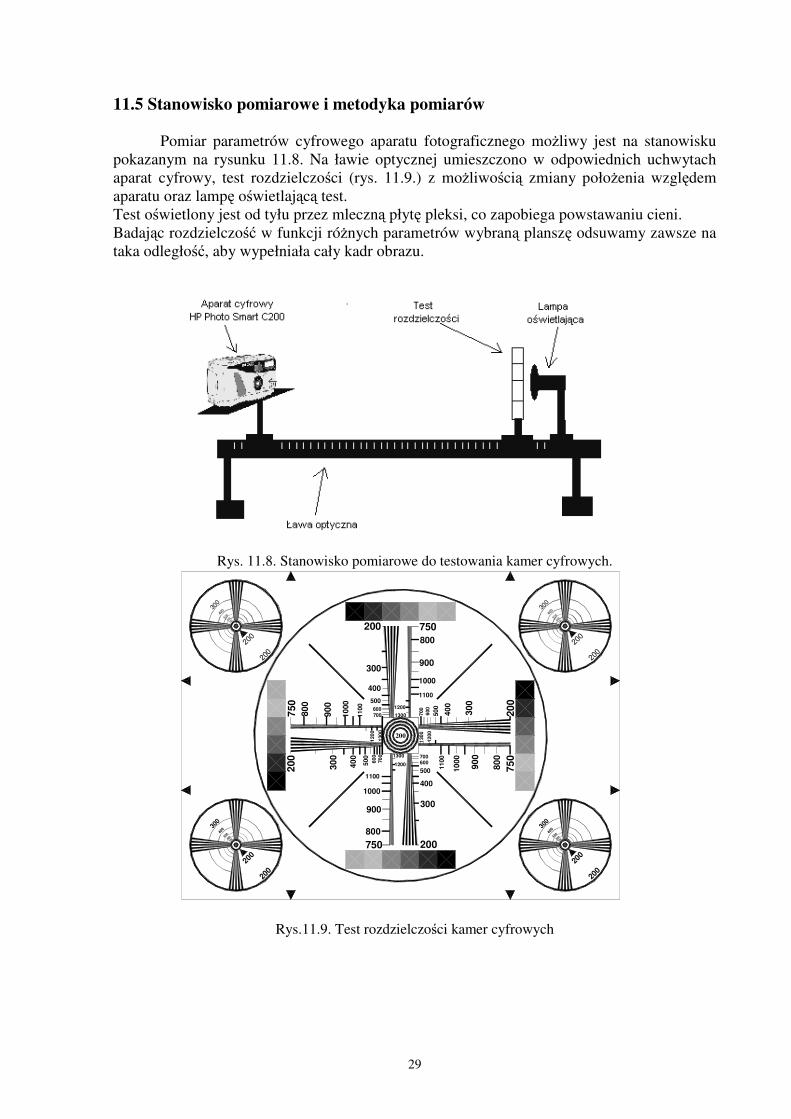
Pomiar parametrów cyfrowego aparatu fotograficznego możliwy jest na stanowisku
pokazanym na rysunku 11.8. Na ławie optycznej umieszczono w odpowiednich uchwytach
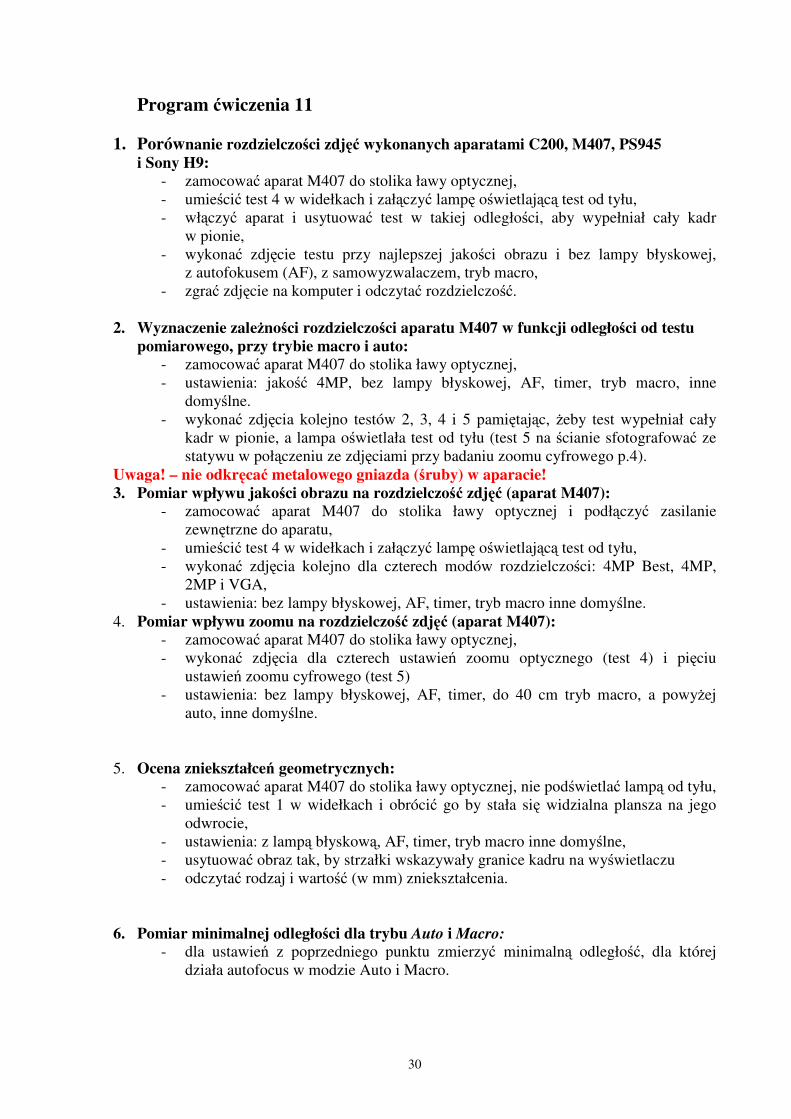
aparat cyfrowy, test rozdzielczości (rys. 11.9.) z możliwością zmiany położenia względem
aparatu oraz lampę oświetlającą test.
Test oświetlony jest od tyłu przez mleczną płytę pleksi, co zapobiega powstawaniu cieni.
Badając rozdzielczość w funkcji różnych parametrów wybraną planszę odsuwamy zawsze na
taka odległość, aby wypełniała cały kadr obrazu.
Rys. 11.8. Stanowisko pomiarowe do testowania kamer cyfrowych.
300
400
500
600
700
200
200
300
400
500
600
700
200
200
700
20
0
30
0
40
0
500
600
75
0
80
0
90
0
10
00
1100
12
00
130
0
300
400
500
600
700
200
200
300
400
500
600
700
200
200
200
200
300
400
500
600
7001300
1200
1100
1000
900
800
750
1300
1200
1100
1000
900
800
750
200
30
0
40
0
500
60
0
70
01
30
0
120
0
1100
10
00
90
0
80
0
750
200
300
400
500
600
700
Rys.11.9. Test rozdzielczości kamer cyfrowych
30
Program ćwiczenia 11
1. Porównanie rozdzielczości zdjęć wykonanych aparatami C200, M407, PS945
i Sony H9: - zamocować aparat M407 do stolika ławy optycznej,
- umieścić test 4 w widełkach i załączyć lampę oświetlającą test od tyłu,
- włączyć aparat i usytuować test w takiej odległości, aby wypełniał cały kadr
w pionie,
- wykonać zdjęcie testu przy najlepszej jakości obrazu i bez lampy błyskowej,
z autofokusem (AF), z samowyzwalaczem, tryb macro,
- zgrać zdjęcie na komputer i odczytać rozdzielczość.
2. Wyznaczenie zależności rozdzielczości aparatu M407 w funkcji odległości od testu
pomiarowego, przy trybie macro i auto: - zamocować aparat M407 do stolika ławy optycznej,
- ustawienia: jakość 4MP, bez lampy błyskowej, AF, timer, tryb macro, inne
domyślne.
- wykonać zdjęcia kolejno testów 2, 3, 4 i 5 pamiętając, żeby test wypełniał cały
kadr w pionie, a lampa oświetlała test od tyłu (test 5 na ścianie sfotografować ze
statywu w połączeniu ze zdjęciami przy badaniu zoomu cyfrowego p.4).
Uwaga! – nie odkręcać metalowego gniazda (śruby) w aparacie!
3. Pomiar wpływu jakości obrazu na rozdzielczość zdjęć (aparat M407): - zamocować aparat M407 do stolika ławy optycznej i podłączyć zasilanie
zewnętrzne do aparatu,
- umieścić test 4 w widełkach i załączyć lampę oświetlającą test od tyłu,
- wykonać zdjęcia kolejno dla czterech modów rozdzielczości: 4MP Best, 4MP,
2MP i VGA,
- ustawienia: bez lampy błyskowej, AF, timer, tryb macro inne domyślne.
4. Pomiar wpływu zoomu na rozdzielczość zdjęć (aparat M407): - zamocować aparat M407 do stolika ławy optycznej,
- wykonać zdjęcia dla czterech ustawień zoomu optycznego (test 4) i pięciu
ustawień zoomu cyfrowego (test 5)
- ustawienia: bez lampy błyskowej, AF, timer, do 40 cm tryb macro, a powyżej
auto, inne domyślne.
5. Ocena zniekształceń geometrycznych: - zamocować aparat M407 do stolika ławy optycznej, nie podświetlać lampą od tyłu,
- umieścić test 1 w widełkach i obrócić go by stała się widzialna plansza na jego
odwrocie,
- ustawienia: z lampą błyskową, AF, timer, tryb macro inne domyślne,
- usytuować obraz tak, by strzałki wskazywały granice kadru na wyświetlaczu
- odczytać rodzaj i wartość (w mm) zniekształcenia.
6. Pomiar minimalnej odległości dla trybu Auto i Macro: - dla ustawień z poprzedniego punktu zmierzyć minimalną odległość, dla której
działa autofocus w modzie Auto i Macro.

31
7. Korekcja zdjęć w programie HP Photo Printing (opcjonalnie): - kadrowanie obrazu,
- identyfikacja i usunięcie przebarwienia,
- wyostrzanie zdjęcia,
- regulacja balansu kolorów i oświetlenia zdjęcia.
- zapis zdjęć po obróbce,
- publikację zdjęć w internecie.
Ze względu na czytelność zalecane jest załączenie do sprawozdania wniosków w formie drukowanej
Pytania sprawdzające: 1. Schemat blokowy aparatu fotograficznego.
2. Co to jest liczba przesłony i jaki związek ma z jasnością obiektywu?
Która liczba przesł. (2,8 czy 5,6) gwarantuje większy strumień światła
i ilokrotnie?
3. Cechy odwzorowania wiernego, wzór soczewkowy, powiększenie
liniowe i kątowe. Na czym polega zoom optyczny i zoom cyfrowy?
4. Jak realizowana jest migawka w aparacie cyfrowym? Co to jest
efekt czerwonych oczu?
5. Jak definiuje się rozdzielczość? Co to jest kompresja?
Uwaga! Podobnie jak w pozostałych ćwiczeniach, wyznaczenie rozdzielczości obrazów dokonuje
się za pomocą plansz testowych. Plansze, podobne do stosowanych w telewizji, pozwalają na
określenie rozdzielczości pionowej LV i poziomej LH, w liniach (telewizyjnych) na kadr, umownie
o szerokości równej wysokości (kwadratowy). W związku z tym wysokość obrazu w wizjerze
powinna dokładnie odpowiadać rozmiarowi pionowemu ekranu LCD aparatu. Dopasowanie
uzyskuje się przez dobór właściwej odległości planszy od obiektywu.
W przypadku gdy trzeba określić liczbę linii rozdzielanych w poziomie dla pełnej szerokości kadru
LHF, odczytaną rozdzielczość poziomą LH należy pomnożyć przez współczynnik kształtu ekranu F
= H/V, gdzie H i V są odpowiednio szerokością i wysokością ekranu (kadru). Dzięki takiej formule
określania rozdzielczości można stosować te same plansze testowe dla przetworników o różnych
formatach.