Juan-Antonio Corrales Ramon Institut Pascal Institut ... 3 nov 2015/ETAT ART DE LA... ·...
16
Juan-Antonio Corrales Ramon Institut Pascal Institut Français Mécanique Avancée Jean-Marie D'Ettorre, Virginie Roux et Nicolas Jaunet Michelin 1
Transcript of Juan-Antonio Corrales Ramon Institut Pascal Institut ... 3 nov 2015/ETAT ART DE LA... ·...

Juan-Antonio Corrales RamonInstitut Pascal
Institut Français Mécanique Avancée
Jean-Marie D'Ettorre, Virginie Roux et Nicolas JaunetMichelin
1
Contexte : Rapport fait pendant un stage dans le Service R&D Procédés Michelin avec:
– Jean-Marie D'Ettore, Virginie Roux et Nicolas Jaunet
Introduction Types de collaboration Caractéristiques des robots collaboratifs Robots collaboratifs actuels Projets de recherche européens Travaux de recherche précédents
2

Interaction Homme-Robot dans la recherche◦ Prioritaire dans le Programme H2020
PPP Robotics PPP Factories of the Future Roadmap euRobotics AISBL◦ Prioritaire aux USA
Roadmap for US Robotics
Études de marché récents◦ Évolution exponentielle◦ ABI Research, June 2015
3
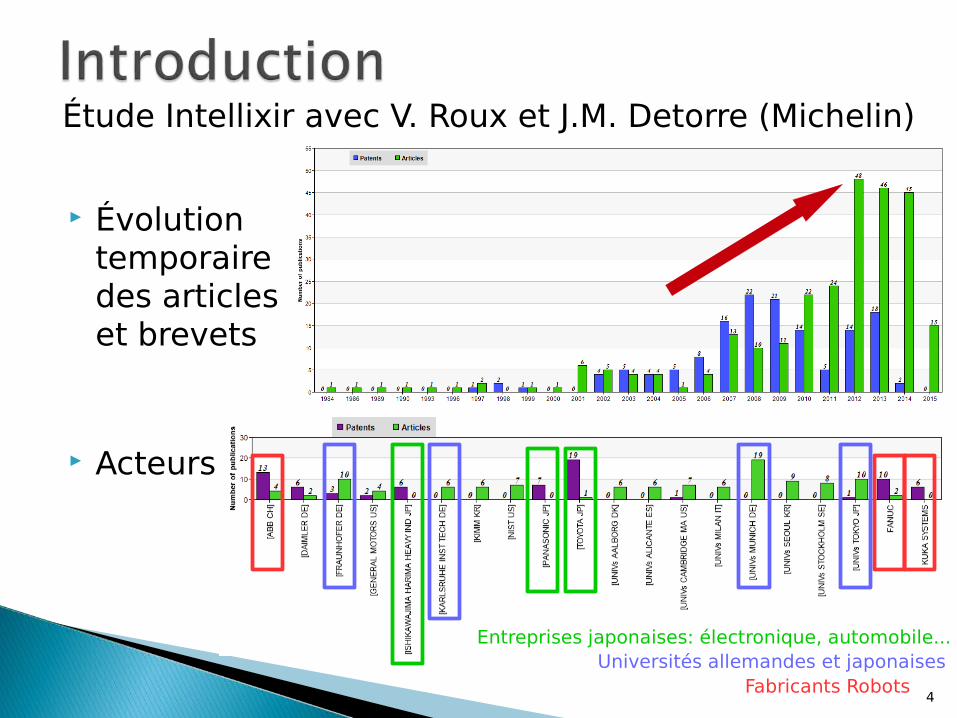
Évolution temporaire des articles et brevets
Acteurs
4Fabricants Robots
Universités allemandes et japonaisesEntreprises japonaises: électronique, automobile...
Étude Intellixir avec V. Roux et J.M. Detorre (Michelin)

Arrêt d’urgence automatique
Guidage manuel
Surveillance dela distance Homme-Robot
Limitation d’effort et vitesse
5
Sécurité de l’humain◦ Construction légère◦ Souplesse: mécanique et contrôle
Facilité de programmation◦ Similarité avec l’humain (1 ou 2 bras)◦ Guidage manuel
Intégration de capteurs◦ Capteurs de force◦ Caméras
Intelligence et autonomie◦ Mobilité et compréhension environnement
6
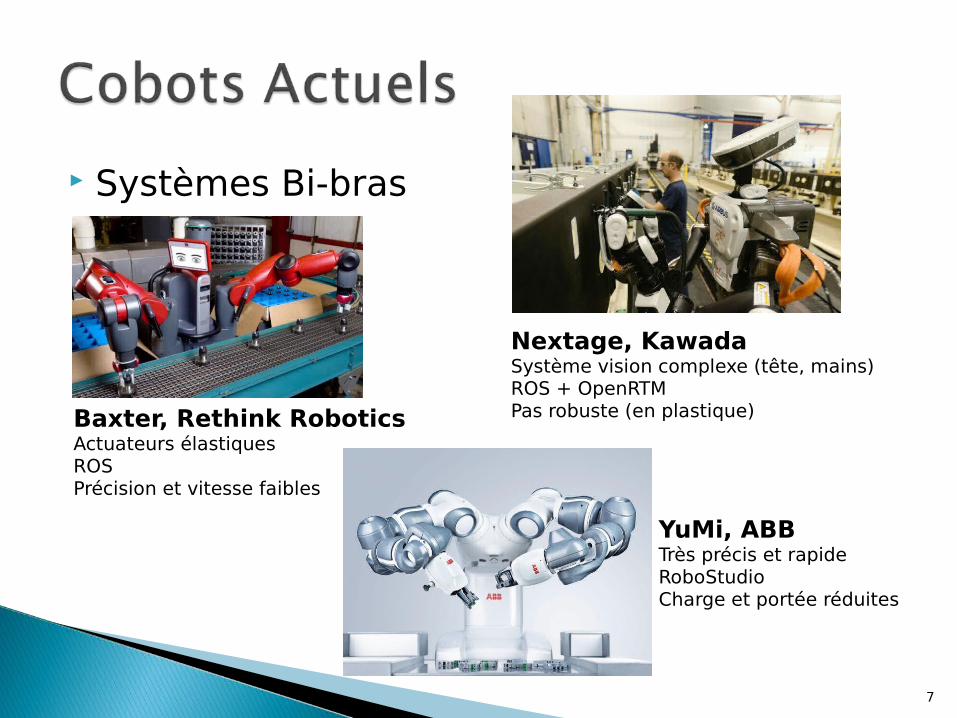
Systèmes Bi-bras
7
Baxter, Rethink RoboticsActuateurs élastiquesROSPrécision et vitesse faibles
Nextage, KawadaSystème vision complexe (tête, mains)ROS + OpenRTMPas robuste (en plastique)
YuMi, ABBTrès précis et rapideRoboStudioCharge et portée réduites

Bras collaboratifs
8
UR-10, Universal RobotsContrôle force par courantTablette tactile + ROSCharge importante (10Kg)
LWR iiwa, KukaUn capteur de force par articulationEclipse+Java, ROSBases mobiles (KMR, Valeri)
APAS, BOSCHPeau tactileSystème vision mainCharge moyenne (2Kg)

Autres bras collaboratifs
9
BioRob, Bionic RoboticsConception compacte (moteurs dans la base)Tendons antagonistesCharge moyenne (3Kg)
CR-35iA, FanucCharge et portée importantes (35Kg)Capteur de force dans la baseVitesse limitée pour sécurité
iZac, MCRoboticsProgrammation graphiqueLibraire de fonctionnalités Génération code pour d'autres robots
SMErobotics◦ Librairie d’habilités robotiques◦ Modèles pour la tâche
Factory-in-a-day◦ Templates pour les composants◦ ROS Industrial
FourByThree◦ Series Elastic Actuators◦ Architecture ouverte
10
Projets Recherche EuropéensProjets Recherche Européens
Robo-partner◦ Intralogistics Mobile Assistant Units◦ Support réalité augmentée
LIAA – Lean Automation◦ Outil conception cellules robotiques◦ Reconnaissance de gestes
SAPHARI◦ Interaction Homme-Robot Physique◦ Analyse de risques
11
Projets Recherche EuropéensProjets Recherche Européens
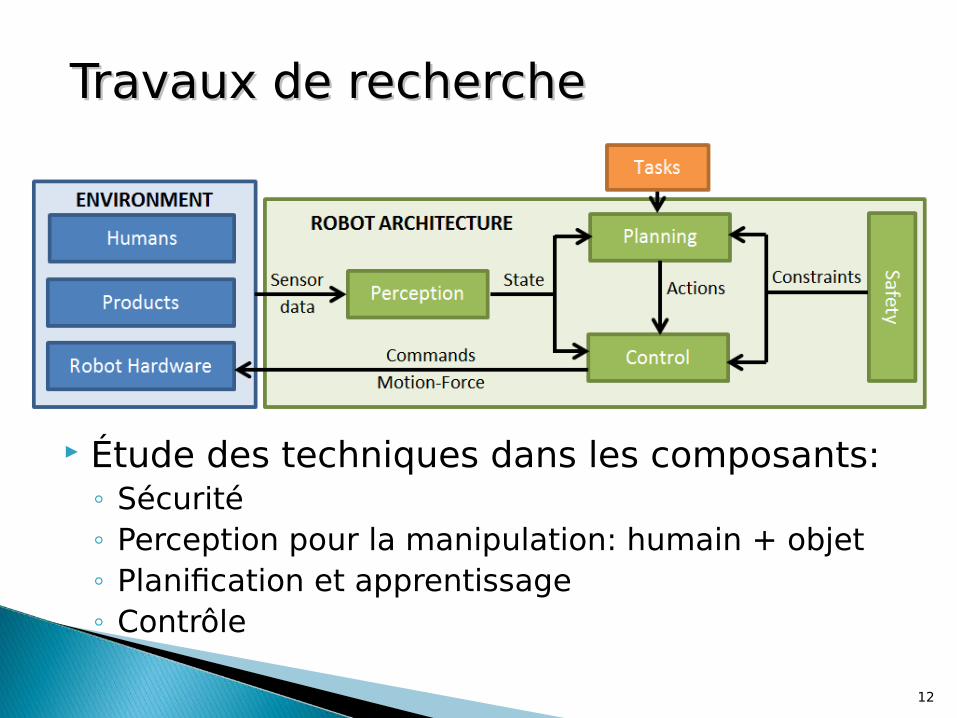
Étude des techniques dans les composants:◦ Sécurité◦ Perception pour la manipulation: humain + objet◦ Planification et apprentissage◦ Contrôle
12
Travaux de rechercheTravaux de recherche
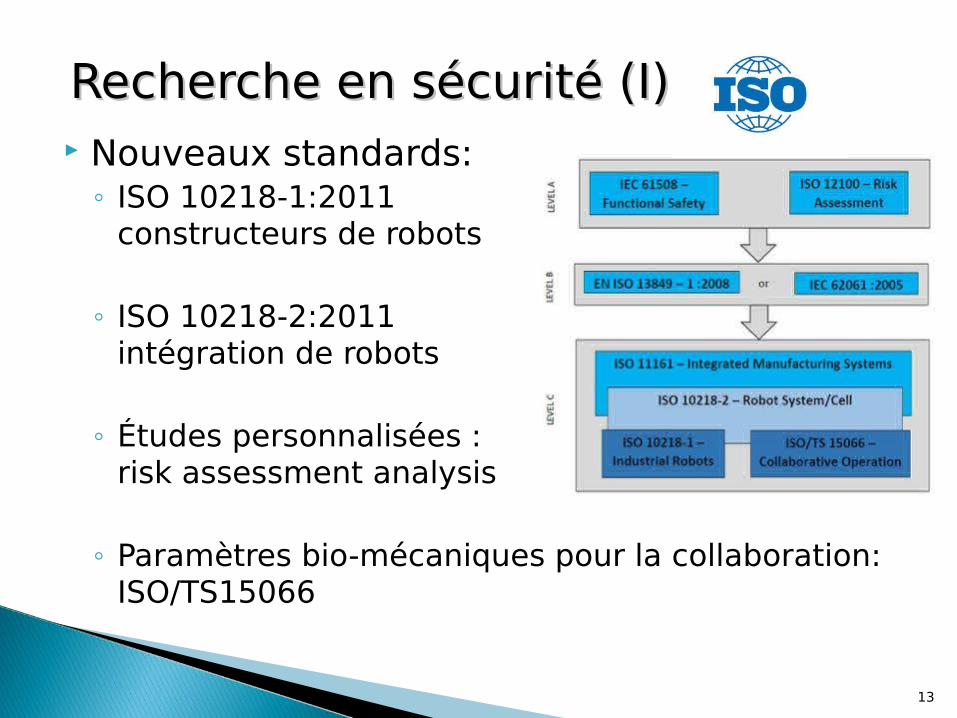
Nouveaux standards:◦ ISO 10218-1:2011
constructeurs de robots
◦ ISO 10218-2:2011intégration de robots
◦ Études personnalisées :risk assessment analysis
◦ Paramètres bio-mécaniques pour la collaboration: ISO/TS15066
13
Recherche en sécurité (I)Recherche en sécurité (I)
14
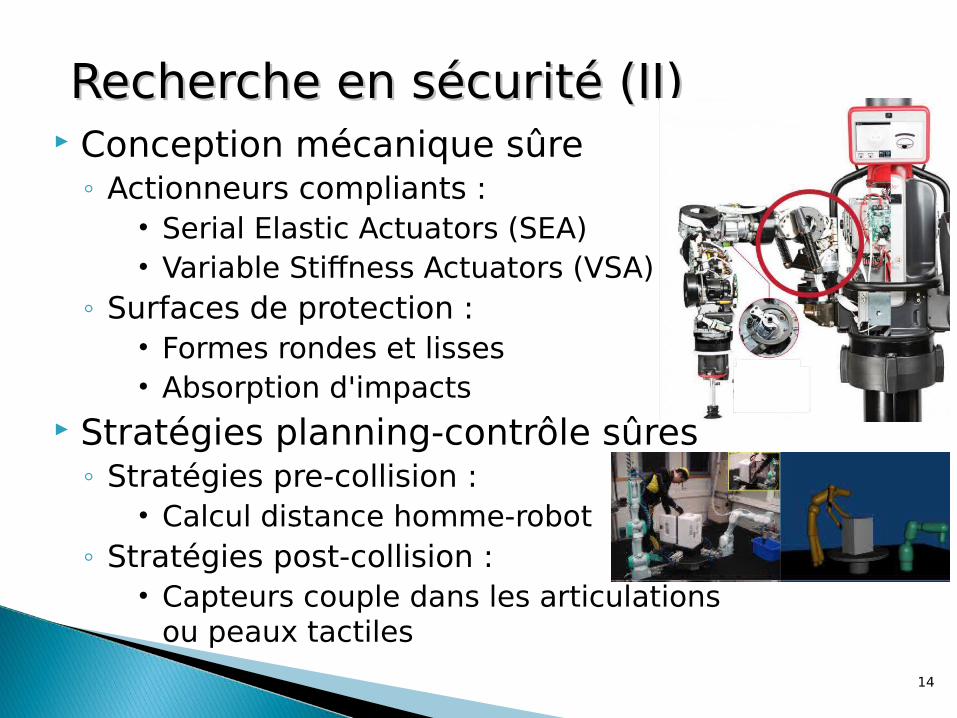
Recherche en sécurité (II)Recherche en sécurité (II) Conception mécanique sûre◦ Actionneurs compliants :
• Serial Elastic Actuators (SEA)• Variable Stiffness Actuators (VSA)
◦ Surfaces de protection :• Formes rondes et lisses• Absorption d'impacts
Stratégies planning-contrôle sûres◦ Stratégies pre-collision :
• Calcul distance homme-robot◦ Stratégies post-collision :
• Capteurs couple dans les articulations ou peaux tactiles

15
Recherche en perceptionRecherche en perception Perception de l'humain :◦ Tracking (Suivi) de l'humain:
• Vision : Vicon ou Kinect• Inertiels : gyros, IMUs...
◦ Reconnaissance de gestes
Perception du produit :◦ Segmentation :
• Couleur, nuages de points...◦ Reconnaissance et calcul saisie:
• Formes, parties de l'objet, BD objets, synthèse saisie...
RGB Depth
PCL Segmentation
16
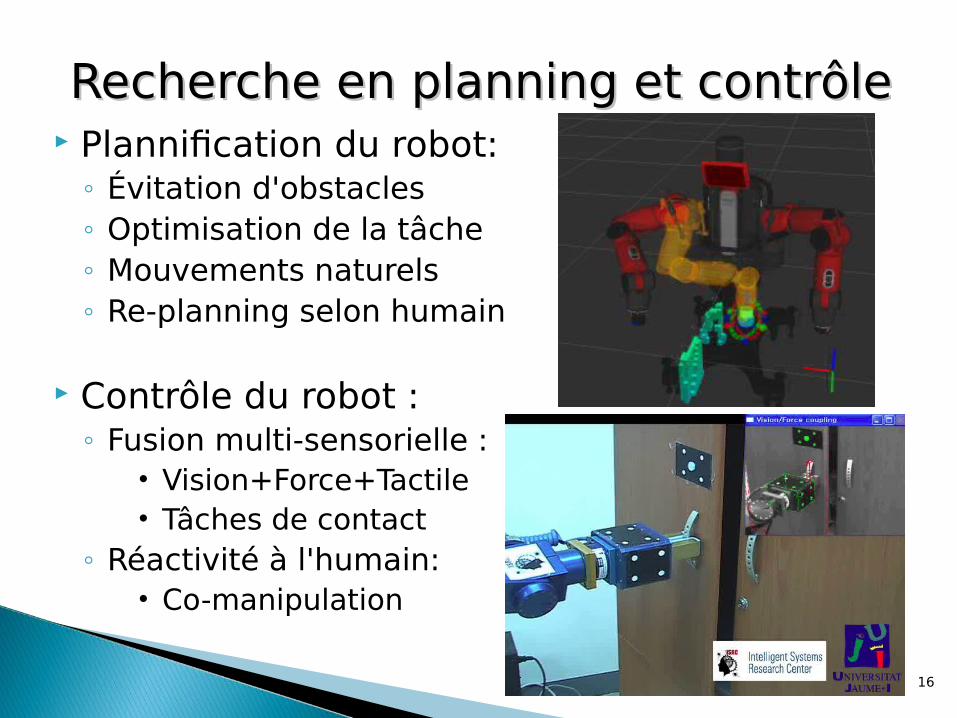
Recherche en planning et contrôleRecherche en planning et contrôle Plannification du robot:◦ Évitation d'obstacles◦ Optimisation de la tâche◦ Mouvements naturels◦ Re-planning selon humain
Contrôle du robot :◦ Fusion multi-sensorielle :
• Vision+Force+Tactile• Tâches de contact
◦ Réactivité à l'humain:• Co-manipulation


















