Geodezja Tom 1 Jagielski
54
-
Upload
remi-remik -
Category
Documents
-
view
7.615 -
download
4
Transcript of Geodezja Tom 1 Jagielski


Geodezja Tom 1
Andrzej Jagielski
Niniejsza darmowa publikacja zawiera jedynie fragment pełnej wersji
całej publikacji.
Aby przeczytać ten tytuł w pełnej wersji kliknij tutaj.
Niniejsza publikacja może być kopiowana, oraz dowolnie rozprowadzana tylko i wyłącznie w formie
dostarczonej przez Wydawnictwo GEODPIS. Zabronione są jakiekolwiek zmiany w zawartości publikacji
bez pisemnej zgody Wydawnictwa GEODPIS - wydawcy niniejszej publikacji. Zabrania się jej
odsprzedaży.
Pełna wersja niniejszej publikacji jest do nabycia w sklepie
internetowym
www.witmir.pl

c
h h
v
l l
c
v
Q
c
v l
v
l c
1986

Opiniodawcy I wydania: prof. dr hab. inż. Jacek Szewczyk dr inż. Jan Szczurek Copyright © by Andrzej Jagielski Wydanie II zmodyfikowane Podręcznik jest przeznaczony jako lektura pomocnicza dla studentów I roku wydziałów geodezyjnych i uczniów klas I – III technikum geodezyjnego. Projekt okładki, skład komputerowy, redakcja i rysunki: Andrzej Jagielski Druk, oprawa: Wydawnictwo: Andrzej Jagielski Dystrybucja: Andrzej Jagielski ℡℡℡℡ tel. (012) 411–89–43
� tel. kom. 505-204-149
���� e-mail [email protected]
���� www.ar.krakow.pl/~ajagielski/
Bez pisemnej zgody posiadacza praw autorskich podręcznik nie może być w całości ani we fragmentach powielany, kopiowany lub rozpowszechniany za pomocą urządzeń elektro-nicznych, mechanicznych, kopiujących, nagrywających itp.
ISBN 83-922884–0–8
���� !

3
SPIS TREŚCI: Przedmowa do wydania I ....................................................................................................................... 9 Uwagi do wydania II .................................................................................................................................................. 9 Rozdział 1: Wiadomości wstępne ...................................................................................... 10
1.1. Definicja, zadania i podział geodezji.......................................................................................... 10 1.2. Powierzchnie odniesienia ........................................................................................................... 13 1.3. Geodezyjny system odniesień przestrzennych ........................................................................... 16 1.4. Osnowa geodezyjna i jej podział ................................................................................................ 20 1.5. Międzynarodowy Układ Jednostek Miar Układ SI..................................................................... 22
1.5.1. Informacje ogólne ……............................................................................................................................ 22 1.5.2. Definicje podstawowych jednostek miar układu SI ................................................................................ 23
1.6. Miary metryczne długości, pola powierzchni i objętości............................................................ 23 1.6.1. Miary długości ……................................................................................................................................. 24 1.6.2. Miary pola powierzchni ........................................................................................................................... 25
1.7. Miary kąta …………………………...………………………………………....………….…... 26 1.7.1. Miara stopniowa …………………………………………………………………………………….…. 26 1.7.2. Miara gradowa …………………………………………………………………………………………. 27 1.7.3. Miara łukowa …………………………………………………………………………...……………… 28 1.7.4. Przeliczanie miar kątowych ……………………………………………………………………………. 28
Rozdział 2: Przyrządy optyczne stosowane w geodezji ................................................... 30 2.1. Elementy optyczne instrumentów geodezyjnych ....................................................................... 30
2.1.1. Odbicie i załamanie światła ..................................................................................................................... 30 2.1.2. Płytka płasko-równoległa (równoległościenna) ....................................................................................... 31 2.1.3. Pryzmaty .................................................................................................................................................. 32 2.1.4. Soczewki .................................................................................................................................................. 34 2.1.5. Wady soczewek (aberracje optyczne) ...................................................................................................... 36
2.2. Oko człowieka ........................................................................................................................... 38 2.3. Lupa ........................................................................................................................................... 43 2.4. Mikroskop .................................................................................................................................. 44 2.5. Luneta ........................................................................................................................................ 44
2.5.1. Zasada działania lunety ........................................................................................................................... 44 2.5.2. Powiększenie lunety ................................................................................................................................ 45 2.5.3. Pole widzenia lunety................................................................................................................................ 46 2.5.4. Jasność lunety .......................................................................................................................................... 47 2.5.5. Luneta geodezyjna z soczewką ogniskującą (teleobiektywem) .............................................................. 47 2.5.6. Obsługa lunety ......................................................................................................................................... 48
Rozdział 3: Tyczenie prostych i pomiary liniowe ............................................................ 50 3.1. Tyczenie linii prostych ............................................................................................................... 50
3.1.1. Sprzęt do tyczenia prostych ..................................................................................................................... 50 3.1.2. Tyczenie prostych sposobami bezpośrednimi okiem nieuzbrojonym ..................................................... 51 3.1.3. Pośrednie tyczenie prostej ....................................................................................................................... 57 3.1.4. Tyczenie prostych za pomocą teodolitu .................................................................................................. 59
3.2. Bezpośredni pomiar długości taśmą geodezyjną ....................................................................... 61 3.2.1. Zasady ogólne bezpośredniego pomiaru długości................................................................................... 61 3.2.2. Sprzęt do bezpośredniego pomiaru długości ........................................................................................... 62 3.2.3. Pomiar odległości taśmą w terenie płaskim i poziomym ........................................................................ 65 3.2.3. Pomiar odległości taśmą w terenie pochyłym ......................................................................................... 67
3.3. Poprawki na poziom morza, komparację i temperaturę taśmy .................................................. 70 3.3.1. Poprawka długości na poziom morza ...................................................................................................... 70 3.3.2. Poprawka na komparację przymiaru ....................................................................................................... 71 3.3.3. Poprawka na temperaturę przymiaru. Suma poprawek............................................................................ 72
3.4. Dokładność bezpośredniego pomiaru odległości ....................................................................... 73 3.5. Metody pośredniego pomiaru długości ...................................................................................... 75
3.5.1. Istota pośrednich pomiarów liniowych .................................................................................................... 75 3.5.2. Pośrednie pomiary odległości za pomocą konstrukcji geometrycznych ................................................. 75

Spis treści 4
3.5.3. Paralaktyczny pomiar odległości.............................................................................................................. 77 3.6. Optyczny pomiar odległości ....................................................................................................... 79 3.7. Elektromagnetyczny pomiar odległości ..................................................................................... 80 3.8. „Ruletki elektroniczne”............................................................................................................... 82
Rozdział 4: Tyczenie kątów prostych ................................................................................ 83 4.1. Tyczenie kątów prostych bez użycia węgielnicy ....................................................................... 83 4.2. Węgielnice .................................................................................................................................. 84
4.2.1. Węgielnica zwierciadlana (lustrzana) ...................................................................................................... 85 4.2.2. Węgielnica pryzmatyczna pięciokątna (pentagonalna) ........................................................................... 86
4.3. Tyczenie obiektów prostokątnych .............................................................................................. 88
Rozdział 5: Utrwalanie i sygnalizacja punktów osnowy geodezyjnej ............................ 91 5.1. Zasady ogólne utrwalania punktów osnowy .............................................................................. 91 5.2. Znaki geodezyjnej osnowy poziomej ......................................................................................... 93 5.3. Znaki geodezyjnej osnowy wysokościowej ............................................................................... 95 5.4. Nowsze sposoby stabilizacji punktów geodezyjnych ................................................................ 98 5.5. Podstawa prawna stabilizacji punktów geodezyjnych ............................................................. 101 5.6. Opis topograficzny punktu osnowy geodezyjnej ..................................................................... 102 5.7. Sygnalizacja punktów geodezyjnych ....................................................................................... 108
Rozdział 6: Pomiar kątów poziomych i pionowych ....................................................... 111 6.1. Zasady konstrukcji przyrządów do pomiaru kątów ................................................................. 111 6.2. Budowa teodolitu ..................................................................................................................... 113
6.2.1. Spodarka .................................................................................................................................................113 6.2.2. Limbus ................................................................................................................................................... 114 6.2.3. Alidada .................................................................................................................................................. 116
6.3. Libele i piony ........................................................................................................................... 119 6.3.1. Libele ..................................................................................................................................................... 119 6.3.2. Piony ..................................................................................................................................................... 124
6.4. Statywy ..................................................................................................................................... 126 6.5. Układy osiowe teodolitów ....................................................................................................... 129 6.6. Urządzenia odczytowe teodolitów optycznych ........................................................................ 131
6.6.1. Indeks, mikroskop indeksowy ............................................................................................................... 132 6.6.2. Noniusz, mikroskop noniuszowy .......................................................................................................... 133 6.6.3. Mikroskop skalowy ................................................................................................................................ 135 6.6.4. Mikroskopy jednomiejscowe z mikrometrami ...................................................................................... 137 6.6.5. Mikroskopy dwumiejscowe z mikrometrami ........................................................................................ 138
6.7. Podział teodolitów na klasy dokładnościowe .......................................................................... 143 6.8. Warunki geometryczne, sprawdzenie i rektyfikacja teodolitu ................................................. 144
6.8.1. Założenia ogólne .................................................................................................................................... 144 6.8.2. Warunki teodolitu .................................................................................................................................. 145 6.8.3. Sprawdzenie warunków: l⊥v i Q⊥v oraz rektyfikacja libel alidadowych ............................................. 147 6.8.4. Sprawdzenie warunku c⊥h i rektyfikacja błędu kolimacji .................................................................... 148 6.8.5. Sprawdzenie warunku h⊥v, eliminowanie błędu inklinacji .................................................................. 151 6.8.6. Sprawdzenie warunku n1⊥v i usunięcie błędu skręcenia krzyża kresek ................................................ 152 6.8.7. Sprawdzenie warunku przecinania się osi c, v i eliminowanie wpływu mimośrodu osi celowej ......... 153 6.8.8. Wykrywanie i eliminowanie błędu mimośrodu alidady ........................................................................ 154 6.8.9. Wykrywanie i eliminowanie błędów podziału limbusa ......................................................................... 155 6.8.10. Sprawdzenie i rektyfikacja pionu optycznego ..................................................................................... 156
6.9. Sprawdzenie i obsługa elementów mechaniczno-optycznych teodolitu .................................. 156 6.9.1. Sprawdzenie statywu, futerału i wyposażenia teodolitu ........................................................................ 156 6.9.2. Sprawdzenie śrub ................................................................................................................................... 157 6.9.3. Sprawdzenie libel .................................................................................................................................. 158 6.9.4. Sprawdzenie lunety i mikroskopu.......................................................................................................... 158 6.9.5. Uwagi dotyczące zasad obchodzenia się z teodolitem .......................................................................... 159

5
6.10. Wpływy błędów: libeli, kolimacji i inklinacji na pomiar kąta poziomego ............................ 159 6.10.1. Wpływ błędu niepionowego ustawienia osi v ...................................................................................... 159 6.10.2. Wpływ błędu kolimacji i inklinacji ..................................................................................................... 161
6.11. Pomiar kątów poziomych ....................................................................................................... 162 6.11.1. Orientacja kierunków na limbusie ....................................................................................................... 162 6.11.2. Czynności wstępne na stanowisku przed pomiarem kątów poziomych .............................................. 163 6.11.3. Pomiar pojedynczego kąta (pomiar zwykły) ....................................................................................... 164 6.11.4. Dziennik pomiaru kątów ...................................................................................................................... 165 6.11.5. Pomiar pojedynczego kąta poziomego metodą repetycyjną ................................................................ 166 6.11.5. Pomiar kątów poziomych metodą kierunkową ................................................................................... 169 6.11.7. Zarys innych metod pomiaru kątów poziomych .................................................................................. 171
6.12. Dokładność pomiaru kątów poziomych ................................................................................. 172 6.13. Pomiar kątów pionowych ....................................................................................................... 175
6.13.1. Rodzaje kątów pionowych. Koło pionowe teodolitu ........................................................................... 175 6.13.2. Pomiar kąta pionowego i wyznaczenie błędu indeksu ........................................................................ 177 6.13.3. Sprawdzenie miejsca zera KV i rektyfikacja błędu indeksu ................................................................ 179 6.13.4. Kompensatory kręgu pionowego ......................................................................................................... 181 6.13.5. Dokładność pomiaru kątów pionowych ............................................................................................... 183
6.14. Teodolity elektroniczne .......................................................................................................... 184
Rozdział 7: Pomiary azymutów ....................................................................................... 188 7.1. Pomiary busolowe .................................................................................................................... 188
7.1.1. Magnetyzm ziemski ............................................................................................................................... 188 7.1.2. Instrumenty busolowe ............................................................................................................................ 189 7.1.3. Sprawdzanie busol ..................................................................................................................................190 7.1.4. Pomiar azymutu magnetycznego ........................................................................................................... 191 7.1.5. Ciągi busolowe ...................................................................................................................................... 192
7.2. Żyroskopowy pomiar azymutów.............................................................................................. 194
Rozdział 8: Podstawowe zadania geodezyjne z rachunku współrzędnych................... 197 8.1. Geodezyjny układ współrzędnych prostokątnych .................................................................... 197 8.2. Orientacja pomiarów geodezyjnych ......................................................................................... 199 8.3. Podstawowe związki w płaskim układzie współrzędnych prostokątnych, płaskich ................ 202 8.4. Obliczenie azymutu i długości boku ze współrzędnych .......................................................... 203 8.5. Symbole rachunkowe S. Hausbrandta ...................................................................................... 205 8.6. Obliczenie kąta ze współrzędnych ........................................................................................... 206 8.7. Obliczanie współrzędnych punktów posiłkowych ................................................................... 207
8.7.1. Obliczenie współrzędnych punktu na prostej ........................................................................................ 208 8.7.2. Obliczenie współrzędnych punktu na domiarze prostokątnym ............................................................. 209 8.7.3. Obliczenie współrzędnych grupy punktów posiłkowych ...................................................................... 211 8.7.4. Obliczenie współrzędnych punktu wyznaczonego metodą biegunową ................................................. 212
8.8. Obliczenie współrzędnych punktów przecięć prostych ........................................................... 213 8.8.1. Obliczenie współrzędnych punktu przecięcia boku osnowy z ramką sekcyjną .................................... 213 8.8.2. Obliczenie współrzędnych punktu przecięcia się prostych ................................................................... 214
8.9. Obliczanie ciągów poligonowych, sytuacyjnych .................................................................... 217 8.9.1. Podstawowe pojęcia z poligonizacji ..................................................................................................... 217 8.9.2. Obliczenie ciągów otwartych, wiszących ............................................................................................. 218 8.9.3. Obliczenie ciągów otwartych z nawiązaniem pełnym ..........................................................................220 8.9.4. Obliczenie ciągów otwartych z nawiązaniem niepełnym ..................................................................... 225 8.9.4. Obliczenie ciągu poligonowego zamkniętego ...................................................................................... 226
8.10. Obliczanie wcięć pojedynczych ............................................................................................. 227 8.10.1. Kątowe wcięcie w przód ...................................................................................................................... 227 8.10.2. Wcięcie liniowe ................................................................................................................................... 229
8.11. Obliczenie domiarów prostokątnych ze współrzędnych ........................................................ 231 8.12. Wybrane programy do przeprowadzania obliczeń geodezyjnych........................................... 232
8.12.1. Program WinKalk ................................................................................................................................ 232 8.12.2. Program C-Geo .................................................................................................................................... 235

Spis treści 6
Rozdział 9: Obliczanie pola powierzchni ........................................................................ 240 9.1. Zasady i metody obliczania pól ................................................................................................ 240 9.2. Obliczanie pól prostych figur geometrycznych ....................................................................... 242 9.3. Obliczenie pola dowolnego wieloboku zamkniętego............................................................... 244
9.3.1. Obliczenie pola wieloboku w oparciu o jego podział na trójkąty ......................................................... 244 9.3.2. Obliczenie pola wieloboku zdjętego metodą rzędnych i odciętych ....................................................... 245 9.3.3. Obliczenie pola wieloboku zdjętego metodą biegunową ...................................................................... 245 9.3.4. Obliczenie pola wieloboku ze współrzędnych prostokątnych ............................................................... 246
9.4. Obliczanie pól metodą graficzną .............................................................................................. 248 9.5. Obliczanie pól metodą mechaniczną ........................................................................................ 251
9.5.1. Planimetr biegunowy ...……………………………………………………………………………..… 251 9.5.2. Pomiar pola przy biegunie ustawionym na zewnątrz figury …………………………………...…..…. 253 9.5.3. Pomiar pola z biegunem wewnątrz planimetrowanej figury …………………………...……………...256 9.5.4. Wyznaczenie stałych planimetru biegunowego ………………………...…………………………….. 257 9.5.5. Technika pomiaru pola przy pomocy planimetru ………...……….………………………………….. 258
9.6. Deformacje podkładów mapowych .......................................................................................... 260 9.7. Dokładność określania pól ....................................................................................................... 262 9.8. Wymogi instrukcji G-5 związane z obliczaniem pól (wybór fragmentów) ............................. 263 9.9. Nowe sposoby obliczania pól ................................................................................................... 264
9.9.1. Tendencje w usprawnieniach w dziedzinie obliczania pól .................................................................... 264 9.9.2. Digimetry i planimetry elektroniczne .................................................................................................... 265
9.10. Zastosowanie niektórych programów geodezyjnych do obliczania pól ................................ 267 9.10.1. Obliczanie pól programem WinKalk ................................................................................................... 267 9.10.2. Obliczanie pól programem C-Geo ....................................................................................................... 269
Rozdział 10: Pomiary wysokościowe (niwelacja) ........................................................... 271 10.1. Podstawowe pojęcia z zakresu niwelacji ............................................................................... 271 10.2. Metody pomiarów wysokościowych ...................................................................................... 272
10.2.1. Niwelacja geometryczna ...................................................................................................................... 272 10.2.2. Niwelacja trygonometryczna ............................................................................................................... 274 10.2.3. Niwelacja barometryczna (fizyczna) i inne sposoby pomiaru wysokości ........................................... 274
10.3. Sposoby i zastosowania niwelacji geometrycznej ................................................................. 275 10.4. Wpływ krzywizny Ziemi i refrakcji na pomiary wysokościowe ........................................... 279 10.5. Sprzęt niwelacyjny ................................................................................................................. 283
10.5.1. Łaty niwelacyjne .................................................................................................................................. 283 10.5.2. Niwelatory ............................................................................................................................................ 286
10.6. Budowa niwelatora libelowego .............................................................................................. 288 10.7. Sprawdzenie i rektyfikacja niwelatora libelowego ze śrubą elewacyjną ............................... 290
10.7.1. Sprawdzenie warunku l ⊥v .................................................................................................................. 291 10.7.2. Sprawdzenie warunku Q⊥v i rektyfikacja libeli okrągłej .................................................................... 291 10.7.3. Sprawdzenie warunku n1 ⊥ v i rektyfikacja skręcenia krzyża kresek .................................................. 291 10.7.4. Sprawdzenie warunku l || c i rektyfikacja błędu nierównoległości ...................................................... 291
10.8. Zasada działania niwelatorów samopoziomujących .............................................................. 296 10.9. Charakterystyka wybranych modeli niwelatorów samopoziomujących ................................ 298
10.9.1. Niwelator Ni 2 firmy Zeiss (Opton Oberkochen)................................................................................. 298 10.9.2. Niwelatory samopoziomujące wytwórni Zeiss Jena ............................................................................ 299 10.9.3. Niwelator NA 2 Wilda ......................................................................................................................... 302 10.9.4. Niektóre niwelatory samopoziomujące innych producentów .............................................................. 303
10.10. Obsługa, sprawdzenie i rektyfikacja niwelatorów samopoziomujących ............................. 304 10.11. Nowsze konstrukcje niwelatorów ........................................................................................ 305 10.12. Sprawdzanie łat niwelacyjnych ............................................................................................ 308 10.13. Niwelacja reperów ............................................................................................................... 310
10.13.1. Zasady ogólne .................................................................................................................................... 310 10.13.2. Etapy projektowania i zakładania sieci niwelacyjnych szczegółowej osnowy wysokościowej ........ 311 10.13.3. Pomiar sieci niwelacyjnych osnowy szczegółowej kl. III, IV ........................................................... 311 10.13.4. Niwelacja osnowy pomiarowej ......................................................................................................... 314

7
10.14. Niwelacja przekrojów (niwelacja podłużna i poprzeczna) .................................................. 314 10.14.1. Cele i zasady niwelacji przekrojów ................................................................................................... 314 10.14.2. Wyznaczenie i utrwalenie w terenie linii profilu podłużnego ........................................................... 315 10.14.3. Wytyczenie i utrwalenie linii profilów (przekrojów) poprzecznych ................................................. 316 10.14.4. Pomiar szczegółów sytuacyjnych położonych w obrębie pasa budowli ........................................... 317 10.14.5. Niwelacja trasy ................................................................................................................................... 317 10.14.6. Obliczenie wysokości zaniwelowanych punktów .............................................................................. 321 10.14.7. Sporządzenie profilu podłużnego .......................................................................................................322 10.14.8. Sporządzenie profilów poprzecznych ................................................................................................ 324
10.15. Niwelacja powierzchniowa siatkowa ................................................................................... 325 10.15.1. Założenia ogólne niwelacji powierzchniowej ................................................................................... 325 10.15.2. Zasady niwelacji siatkowej ............................................................................................................... 326 10.15.3. Tyczenie siatki ................................................................................................................................... 327 10.15.4. Niwelacja siatki .................................................................................................................................. 330 10.15.5. Prace kameralne ................................................................................................................................. 331
10.16. Niwelacja powierzchniowa sposobem punktów rozproszonych .......................................... 332 10.16.1. Zasady niwelacji punktów rozproszonych ........................................................................................ 332 10.16.2. Założenie i pomiar sieci stanowisk niwelatora .................................................................................. 333 10.16.3. Niwelacja punktów powierzchni terenu ............................................................................................ 334
10.17. Niwelacja powierzchniowa profilami .................................................................................. 340 10.18. Interpolacja warstwic ........................................................................................................... 341
10.18.1. Przedstawianie rzeźby terenu na mapie ............................................................................................. 341 10.18.2. Zasady interpolacji warstwic. Interpolacja rachunkowa ................................................................... 342 10.18.3. Interpolacja graficzna za pomocą siatek linii równoległych lub zbieżnych ...................................... 344 10.18.4. Interpolacja graficzna za pomocą przyborów kreślarskich ................................................................ 346 10.18.5. Inne sposoby interpolacji warstwic .................................................................................................... 346
10.19. Wykreślenie warstwic .......................................................................................................... 346 10.20. Niektóre zastosowania praktyczne mapy warstwicowej ...................................................... 349
10.20.1. Określenie wysokości punktu położonego między warstwicami ...................................................... 349 10.20.2. Określenie spadku odcinka zawartego między warstwicami ............................................................. 350 10.20.3. Wyznaczenie kierunku o zadanym spadku ........................................................................................ 350 10.20.4. Wykreślenie na mapie linii o jednostajnym pochyleniu .................................................................... 351 10.20.5. Wykreślenie profilu terenu na podstawie mapy warstwicowej ......................................................... 352
10.21. Zastosowania niwelacji w pracach inżynierskich ................................................................ 352 10.21.1. Wyznaczenie punktu o zadanej wysokości ....................................................................................... 352 10.21.2. Wyznaczenie linii o zadanym spadku ................................................................................................ 353 10.21.3. Przenoszenie wysokości na zadany poziom ...................................................................................... 355
10.22. Przeniesienie wysokości przez przeszkodę wodną .............................................................. 356
Rozdział 11: Pomiary sytuacyjne .................................................................................... 360 11.1. Istota pomiarów sytuacyjnych, grupy dokładnościowe szczegółów ...................................... 360 11.2. Pozioma osnowa pomiarowa .................................................................................................. 362
11.2.1. Nawiązanie poziomej osnowy pomiarowej ......................................................................................... 362 11.2.2. Związek liniowy jako niezależna osnowa pomiarowa ......................................................................... 363 11.2.3. Ciągi sytuacyjne .................................................................................................................................. 364 11.2.4. Linie pomiarowe .................................................................................................................................. 366 11.2.5. Zastosowanie wcięć do zakładania osnowy pomiarowej .................................................................... 367 11.2.6. Sieci modularne ................................................................................................................................... 368
11.3. Metody pomiaru sytuacyjnego ............................................................................................... 371 11.3.1. Pomiar sytuacyjny metodą ortogonalną (rzędnych i odciętych) ......................................................... 371 11.3.2. Pomiar sytuacyjny metodą biegunową .................................................................................................372 11.3.3. Zdjęcie szczegółów sytuacyjnych metodą przedłużeń ......................................................................... 373 11.3.4. Zdjęcie szczegółów sytuacyjnych metodą wcięć ................................................................................. 374 11.3.5. Miary kontrolne ................................................................................................................................... 375
11.4. Szkic polowy zdjęcia szczegółów sytuacyjnych .................................................................... 378 11.5. Organizacja zdjęcia sytuacyjnego .......................................................................................... 382
11.5.1. Organizacja zdjęcia sytuacyjnego metodą ortogonalną ....................................................................... 382 11.5.2. Organizacja zdjęcia sytuacyjnego metodą biegunową ........................................................................ 383

Spis treści 8
11.6. Zasady generalizacji konturów szczegółów terenowych podczas pomiaru sytuacyjnego ..... 385 11.7. Zarys technologii tworzenia mapy cyfrowej (numerycznej) .................................................. 386 11.8. Tachimetry elektroniczne ....................................................................................................... 388
Rozdział 12: Sporządzenie mapy sytuacyjnej ................................................................ 389 12.1. Mapa analogowa i numeryczna .............................................................................................. 389 12.2. Skala mapy ............................................................................................................................. 391
12.2.1. Pojęcie skali, skale map współczesnych i archiwalnych...................................................................... 391 12.2.2. Przeliczanie skal .................................................................................................................................. 392 12.2.3. Dokładność graficzna mapy ................................................................................................................. 393
12.3. Podziałki ................................................................................................................................. 393 12.3.1. Podziałka liniowa ................................................................................................................................. 393 12.3.2. Podziałka transwersalna ....................................................................................................................... 395
12.4. Podział map ze względu na treść ........................................................................................... 397 12.5. Mapa zasadnicza (podstawowa mapa kraju) .......................................................................... 399 12.6. Wykonanie pierworysu mapy sposobami tradycyjnymi ........................................................ 400
12.6.1. Zasady normalizacji formatów arkuszy map ....................................................................................... 401 12.6.2. Naniesienie ramki sekcyjnej i siatki kwadratów ................................................................................. 402 12.6.3. Naniesienie punktów osnowy szczegółowej i pomiarowej ................................................................. 405 12.6.4. Nanoszenie szczegółów sytuacyjnych zdjętych metodą ortogonalną .................................................. 407 12.6.5. Nanoszenie szczegółów sytuacyjnych zdjętych metodą biegunową ................................................... 409
12.7. Uzgodnienie styków i sprawdzenie dokładności graficznej pierworysu ............................... 411 12.8. Redakcja pierworysu i jego wykreślenie ................................................................................ 412 12.9. Kompletowanie operatu pomiaru sytuacyjnego ..................................................................... 416 12.10. Zarys wykorzystania programu MikroMap do wykonania map .......................................... 421 12.11. J. Biegalski – Podstawy tworzenia mapy programem C-Geo v. 6 ....................................... 427
12.11.1. Czynności wstępne ............................................................................................................................. 427 12.11.2. Tworzenie mapy ................................................................................................................................. 429

197
Rozdział 8: Podstawowe zadania geodezyjne z rachunku współrz ędnych
8.1. Geodezyjny układ współrz ędnych prostok ątnych
Do wyznaczenia położenia punktów znajdujących się na powierzchni Ziemi wyko-rzystuje się współrzędne określone w układzie współrzędnych geograficznych astrono-micznych φ, λ lub prostokątnych, geocentrycznych, które następnie podlegają przeliczeniu na współrzędne geodezyjne B, L odniesione do elipsoidy o ściśle ustalonych parametrach, a po wprowadzeniu odpowiedniego odwzorowania kartograficznego są przekształcane na współrzędne prostokątne, płaskie X, Y (por. ust. 1.2, 1.3).
Konieczność przedstawienia zakrzywionej powierzchni Ziemi na płaszczyźnie powo-duje, że sferoidalne elementy geometryczne obiektów wyznaczone na powierzchni odnie-sienia (elipsoidzie lub kuli), muszą być następnie przeniesione na powierzchnię odwzoro-wania kartograficznego, rozwijalną na płaszczyznę, co umożliwia określanie położenia pomierzonych punktów za pomocą współrzędnych prostokątnych, płaskich X, Y. Ponieważ powierzchnia kuli lub elipsoidy nie da się rozwinąć na płaszczyznę bez rozerwania jej cią-głości i bez deformacji, toteż po przeniesieniu obiektów z powierzchni zakrzywionej na płaszczyznę muszą one ulec pewnym zniekształceniom.
Odwzorowanie kartograficzne jest sposobem przedstawienia powierzchni globu ziemskiego lub jego fragmentu w taki sposób, aby każdemu punktowi na powierzchni od-niesienia (elipsoidzie) odpowiadał ściśle określony punkt na płaszczyźnie.
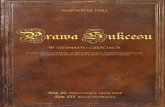
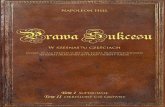
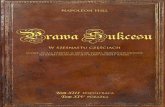
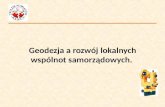
Dzięki odwzorowaniu można za pomocą ustalonych formuł matematycznych przeli-czyć współrzędne geograficzne geodezyjne B, L na współrzędne prostokątne płaskie X, Y. We współczesnej geodezji i kartografii rolę szczególną odgrywają odwzorowania walco-we, a zwłaszcza odwzorowanie wiernokątne, walcowe, poprzeczne (rys. 8.1) opracowane przez dwóch niemieckich matematyków C. F. Gaussa (1825 r.) i L. Krügera (1912 r.).
Dla walca stycznego do elipsoidy ziemskiej linią styczności jest południk osiowy
(środkowy) strefy, stanowiący linię, wzdłuż której zniekształcenia długości są równe zero. Inne południki ulegają zniekształceniom liniowym, które wzrastają w miarę oddalania się od południka osiowego. W celu ograniczenia do z góry założonych wartości dopuszczal-nych zniekształceń obiektów powstałych po ich przeniesieniu z powierzchni odniesienia na płaszczyznę, obszar kraju w odwzorowaniu Gaussa- Krügera (rys. 8.1) został podzielony
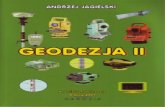
Rys. 8.2. Strefy odwzorowawcze
i układ współrzędnych x, y
x
y
Rys. 8.1. Zasada odwzorowania Gaussa-Krügera
oś walca
N
S
O
R
oś o
brot
u Z
iem
i

8.1. Geodezyjny układ współrzędnych prostokątnych 198
się na pasy południkowe, czyli tzw. strefy. Każdą z nich odwzorowuje się osobno na od-dzielny walec. Po rozcięciu walca wzdłuż tworzącej, południki stanowiące granice strefy dadzą pas odwzorowania w kształcie soczewki, w którym obrazy: południka środkowego strefy i równika są wzajemnie prostopadłymi liniami prostymi, co umożliwia ich wykorzy-stanie w charakterze osi układu współrzędnych prostokątnych płaskich. Każda strefa od-wzorowawcza posiada własny układ, w którym oś x skierowaną na północ stanowi obraz południka środkowego strefy, zaś oś y skierowaną na wschód – obraz równika (rys. 8.2). Obrazy sąsiadujących ze sobą stref odwzorowania Gaussa-Krügera po rozwinięciu na płaszczyznę stykają się ze sobą w punktach położonych na równiku Ziemi.
Układ współrzędnych „1965”
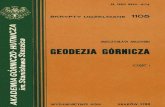
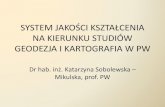
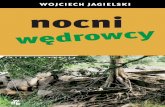
W końcu lat sześćdziesiątych wprowadzono jako obowiązujący w Polsce układ współrzędnych prostokątnych „1965” oparty na elipsoidzie Krasowskiego, w którym za-stosowano podział kraju na pięć stref odwzorowawczych, przy czym strefy I – IV były przedstawione w odwzorowaniu płaszczyznowym, konforemnym (wiernokątnym), nato-miast dla strefy V wykorzystano wiernokątne odwzorowanie Gaussa-Krügera (rys. 8.3).
Każda strefa posiada swój układ współrzędnych z półosią +x zwróconą na północ oraz półosią +y – skierowaną na wschód. Granice stref zostały oparte na podziale admini-stracyjnym sprzed r. 1975 i przebiegały wzdłuż granic dawnych województw.
W układzie „1965” sporządzano mapę zasadniczą we wszystkich skalach bazowych oraz inne opracowania wielkoskalowe. Układ ten do chwili obecnej stanowi też podstawę do określania w Polsce współrzędnych X, Y punktów poziomej osnowy geodezyjnej.
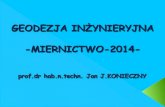
Układ współrzędnych „2000”
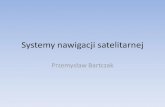
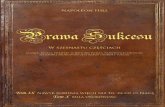
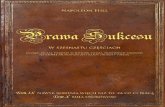
Układ ten obecnie obowiązuje w Polsce i ma z biegiem czasu zastąpić układ „1965”, który może być wykorzystywany tylko do roku 2009. Jest w całości oparty na odwzoro-waniu Gaussa-Krűgera i podziale obszaru Polski na cztery strefy trzystopniowe. Elipsoidą odniesienia jest tu międzynarodowa elipsoida GRS 80, zamiast elipsoidy Krasowskiego.
Rys. 8.4. Strefy układu „2000”
1 5° 2 1 ° 24 ° 1 8°
1 5° 2 1 ° 24 ° 1 8°
Olsztyn
Kielce
Rzeszów
Łódź
Zielona Góra
Lublin
Strefa 6 Strefa 7 Strefa 5
Poznań
Wrocław
Szczecin
Gdańsk
Katowice
Warszawa
Białystok
Kraków
Bydgoszcz
Opole
Strefa 8
Poznań
Wrocław
Szczecin
Gdańsk
Częstochowa
Katowice
Łódź
Warszawa
Białystok
Olsztyn
Kraków
Nowy Sącz
Lublin
Bydgoszcz
Kielce
V I
IV
II
III
Rys. 8.3. Strefy układu „1965”

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 199
Układ „2000” jest wykorzystywany w pracach geodezyjnych dla potrzeb Systemu Infor-macji o Terenie (SIT) oraz w pracach kartograficznych do sporządzania mapy zasadniczej i innych map w skalach 1:10 000 i większych.
Długości geograficzne wschodnie południków środkowych stref trzystopniowych wynoszą: 15°, 18°, 21°, 24°, zaś strefy te są oznaczone kolejnymi numerami: 5, 6, 7, 8 (rys. 8.4). Obraz równika jest linią prostą o równaniu X = 0, natomiast wszystkie punkty leżące na południku osiowym mają końcówkę współrzędnej Y równą 500 000 m. Dla jed-noznacznego określenia przynależności danego punktu do konkretnego pasa (strefy), jako pierwszą cyfrę współrzędnej Y podaje się numer pasa.
Jak już wspomniano w ust. 1.3 geodezyjny układ współrzędnych prostokątnych, pła-skich służy do określania położenia sytuacyjnego punktów terenowych za pomocą współ-rzędnych X, Y oraz posiada ścisły związek z przyjętym odwzorowaniem kartograficznym, umożliwiającym przedstawienie zakrzywionej powierzchni Ziemi lub jej fragmentu na płaszczyźnie rysunku w postaci mapy. Jak wynika z rys. 8.2 układ prostokątny, stosowany w geodezji różni się od układu matematycznego następującymi cechami:
• ustawieniem osi x, y układu, w którym oś x jest pionowa i skierowana w górę, zaś oś y – pozioma oraz skierowana w prawo,
• prawoskrętnym kierunkiem liczenia kątów (zgodnym z ruchem wskazówek zegara) i jednocześnie takim samym kierunkiem numeracji ćwiartek układu, podczas gdy układ matematyczny jest lewoskrętny.
Mimo wymienionych różnic znaki funkcji trygonometrycznych i wszystkie matema-tyczne zależności z trygonometrii oraz geometrii analitycznej zachowują zgodność w obu układach. W układzie geodezyjnym dodatni kierunek osi x z reguły wskazuje północ (N), zaś kierunek +y – wschód (E ). Kierunek półosi +x jest zgodny z kierunkiem południka przechodzącego przez początek układu, zaś pozostałe południki można z pewnym przybli-żeniem traktować jako proste wzajemnie równoległe, tworzące wraz z liniami równole-głymi do osi y tzw. siatkę topograficzną (rys. 8.2). Oś x jest wyznaczona przez obraz połu-dnika głównego danej strefy odwzorowania kartograficznego. Regularna, prostokątna siat-ka topograficzna, utworzona przez wybrane proste równoległe do osi układu stanowi pod-stawę do podziału mapy na arkusze w tzw. układzie sekcyjnym prostokątnym.
Położenie sytuacyjne punktu w układzie prostokątnym jest określane przez dwie wielkości liniowe: odciętą X i rzędną Y, (jako pierwszą wymienia się współrzędną X ).
Do ustalenia przestrzennego położenia danego punktu niezbędna jest jeszcze trzecia współrzędna H, którą w układzie geodezyjnym stanowi wysokość punktu względem przy-jętego poziomu odniesienia, tj. geoidy zerowej, określającej w systemie odniesień prze-strzennych poziom morza. Ujednolicony układ współrzędnych prostokątnych, obowiązują-cy na terenie całego kraju, jest jednym z najważniejszych elementów wspomnianego sys-temu i nosi nazwę układu państwowego. Oprócz tego dla wybranych obszarów kraju lub w wypadku stosowania niezależnych osnów, które nie mają nawiązania do osnowy pań-stwowej, mogą być czasem wykorzystywane układy lokalne.
8.2. Orientacja pomiarów geodezyjnych
W rozdziale 1 przedstawiliśmy krótką charakterystykę układów współrzędnych sto-sowanych w geodezji, w tym wykorzystywane najczęściej płaskie układy prawoskrętne: prostokątny i biegunowy. Orientację boku osnowy lub kierunku względem osi układu określa się za pomocą azymutu lub kąta kierunkowego, które tym różnią się od siebie, że stałym ramieniem azymutu jest kierunek północy, zaś w przypadku kąta kierunkowego

8.2. Orientacja pomiarów geodezyjnych 200
ramieniem tym jest dodatni kierunek osi x układu, która niekoniecznie musi być zoriento-wana na północ. W rachunku współrzędnych wielkościami wyjściowymi lub szukanymi mogą być zarówno elementy liniowe, do których zalicza się: współrzędne punktów X, Y, przyrosty współrzędnych odcinków ∆x, ∆y, długości zredukowane (poziome) d, jak i ele-menty kątowe: azymuty, kąty kierunkowe, poziome kąty wierzchołkowe w sieciach osnów poziomych i figurach geometrycznych .
Azymutem AAB boku AB nazywamy kąt pozio-my, liczony w przedziale od 0 do 360° od kierunku północy w prawo, czyli zgodnie z ruchem wskazó-wek zegara, zawarty między kierunkiem północy wychodzącym z punktu A a danym bokiem AB (rys. 8.5).
Jeśli punktem początkowym boku, dla którego określamy azymut jest punkt B, wtedy po wypro-wadzeniu z niego kierunku północy i zakreśleniu kąta w prawo pomiędzy północą a bokiem BA otrzymamy azymut boku odwrotnego, oznaczony symbolem: ABA. Zgodnie z rys. 8.5 azymut ten różni się od azymutu boku AB o wartość kąta półpełnego:
ABA = AAB ± 180° (8.1)
We wzorze (8.1) znak plus odnosi się do azymutów wyjściowych AAB mniejszych od 180° (200g), zaś znak minus dotyczy azymutów wyjściowych o wartościach przekraczają-cych kąt półpełny. Kierunek północy występujący w definicji azymutu może być określany w różny sposób, w związku z czym wyróżnia się kierunki północy: geograficznej, topogra-ficznej i magnetycznej (rys. 8.6).
Kierunek północy geograficznej (astronomicz-nej) wychodzący z danego punktu ziemskiego jest kierunkiem północnej części południka geograficz-nego, łączącego ten punkt z geograficznym biegu-nem północnym Ziemi. Wyznaczenie kierunku pół-nocy geograficznej i azymutu przedmiotu ziemskiego stanowią jedno z ważniejszych zadań astronomii geodezyjnej. Dość dokładnie kierunek ten wskazuje Gwiazda Polarna (α -Ursae Minoris) w gwiazdozbio-rze Małej Niedźwiedzicy. Kierunek północy magne-tycznej jest wskazywany przez igłę magnetyczną bu-soli, umieszczonej w punkcie początkowym A.
Bieguny magnetyczne Ziemi odznaczają się zmiennością położenia i z reguły nie pokrywają się z biegunami geograficznymi (por. ust. 7.1), toteż kie-runki południków: geograficznego i magnetycznego są od siebie odchylone o zmieniający się w czasie i przestrzeni kąt δ zwany deklinacją magnetyczną. Azymut geograficzny Ag obliczymy na podstawie azymutu magnetycznego Am i deklinacji po dodaniu tych kątów do siebie.
Kierunek północy topograficznej (kartograficznej) jest ściśle związany z przyjętym odwzorowaniem kartograficznym oraz z zależnym od niego układem współrzędnych pro-
⋆
A
B
δ γ
Ag
At
Am
Rys. 8.6. Azymuty: geograficzny,
topograficzny i magnetyczny
180
o
Rys. 8.5. Azymuty: boku wyjścio-
wego AAB i boku odwrotnego ABA
A
B
AAB
AAB
ABA

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 201
stokątnych. Dodatni kierunek osi x układu pokrywa się przeważnie z kierunkiem północy geograficznej (południka geograficznego), lecz dla punktów znajdujących się poza osią x, kierunek północy topograficznej stanowi prostą równoległą do półosi +x, natomiast połu-dniki wyznaczające północ geograficzną w różnych punktach terenowych nie są równole-głe, lecz zbiegają się w punkcie N – biegunie północnym Ziemi. Odchylenie kierunku pół-nocy topograficznej danego punktu A od północy geograficznej tego punktu jest równe ką-towi γ, zwanemu zbieżnością południków (rys. 8.6). Dodając kąt γ do azymutu topograficz-nego At , otrzymujemy azymut geograficzny Ag.
Dla ułatwienia obliczania azymutu, przyjmującego wartości w przedziale od 0 do ką-ta pełnego (0-360°), wygodne jest posługiwanie się kątem ostrym ϕ tzw. czwartakiem, który jako kąt ostry występuje tylko w pierwszej ćwiartce (stąd nazwa: czwartak). Wszyst-kie funkcje trygonometryczne czwartaka są więc dodatnie, zaś wyznaczenie wartości kąta na podstawie wartości tych funkcji ma charakter jednoznaczny.
Czwartak ϕAB jest definiowany jako kąt ostry zawarty pomiędzy linią osi x, czyli jej dodatnim lub ujemnym kierunkiem, a danym bokiem AB.
W ćwiartkach: I i IV ramieniem wyjściowym czwartaków jest prosta skierowana na północ, natomiast w ćwiartkach: II i III ramię to stanowi prosta skierowana na południe.
Na podstawie rysunku 8.7 można ustalić zależności pomiędzy azymutem a czwarta-kiem w poszczególnych ćwiartkach układu współrzędnych prostokątnych zestawione w tabeli 8.1. Zależności te pozwalają na określenie orientacji dowolnego kierunku, czyli obliczenie jego azymutu na podstawie wartości czwartaka φ i znajomości numeru lub symbolu ćwiartki (NE, SE, SW, NW) natomiast ćwiartkę można określić w oparciu o znaki przyrostów ∆x, ∆y.
Tabela 8.1. Azymut A i czwartak φ
Znaki przyrostów Nr i oznaczenie ćwiartki
Zakres wartości azymutu ∆x /cos A/ ∆y /sin A/
Zależność między azymutem a czwartakiem
I (NE) 0° − 90° + + A = ϕ
II (SE) 90° − 180° – + A = 180° – ϕ III (SW) 180° − 270° – – A = 180° + ϕ
IV (NW) 270° − 360° + – A = 360° – ϕ
W geodezji niższej najczęściej nie uwzględnia się krzywizny Ziemi, ponieważ wyniki pomiarów wykonywanych na małych obszarach są odnoszone do płaszczyzny. Z tego
Rys. 8.7. Zależności pomiędzy azymutem A i czwartakiem ϕ w poszczególnych ćwiartkach układu współrzędnych
I ćw. A=ϕ
ϕ A
+x
+y
N
S
W E O
A
II ćw. A=180°-ϕ
ϕ
A
+x
+y
N
S
W E O
B
III ćw. A=180°+ϕ
ϕ A
+x
+y
N
S
W E O
C
IV ćw. A=360°-ϕ
ϕ
A
+x
+y
N
S
W E O
D

8.3. Podstawowe związki w układzie współrzędnych prostokątnych, płaskich 202
względu linie południków traktowane są jako proste równoległe do osi x układu, zaś rów-noleżniki jako proste prostopadłe do południków. Linie te naniesione w stałych odstępach wynoszących 100 mm, tworzą na arkuszach mapy siatkę kwadratów zorientowaną według stron świata. Opis współrzędnych X, Y linii siatki na mapie umożliwia graficzne określenie położenia dowolnego punktu w układzie współrzędnych prostokątnych.
8.3. Podstawowe zwi ązki w układzie współrz ędnych prostok ątnych, płaskich
Dla uproszczenia dalszych rozważań załóżmy, że rozpatrywany bok AB znajduje się w I ćwiartce układu współrzędnych prostokątnych, płaskich, zaś jego azymut AAB jest ką-tem ostrym (rys. 8.8). Po zrzutowaniu punktów A, B na osie układu możemy zaznaczyć ich współrzędne: XA, YA, XB, YB , natomiast rzuty prostokątne boku AB na obie osie są graficzną ilustracją tzw. przyrostów współrzędnych: ∆xAB, ∆yAB , które obliczamy jako różnice współ-rzędnych punktów: A, B, czyli:
ABAB
ABAB
YYy
XXx
∆
∆
−=
−= (8.2)
Na podstawie wzorów (8.2) można sformułować ogólną zasadę obliczania przyrostów ∆x, ∆y danego boku. Jest nią odejmowanie od współrzędnych punktu końcowego boku, współrzędnych jego punktu początkowego. W indeksie dolnym symbolu przyrostu ∆...AB zawarty jest zwrot boku, przy czym podczas odejmowania współrzędna punktu B sta-nowi odjemną, zaś współrzędna punktu A − odjem-nik.
Na podstawie współrzędnych punktu począt-kowego boku i jego przyrostów można obliczyć współrzędne punktu końcowego:
ABAB
ABAB
yYY
xXX
∆
∆
+=
+= (8.3)
W oparciu o zależności w trójkącie ABK (rys. 8.8) można zestawić następujące wzory stosowane powszechnie w rachunku współrzędnych:
tg Ay
xABAB
AB
= ∆∆
(8.4)
d x yAB AB AB= +∆ ∆2 2 (8.5)
∆xAB = d ⋅ cos AAB AB
ABAB d
xA
∆cos =
(8.6) (8.6a)
∆yAB = d ⋅ sin AAB AB
ABAB d
yA
∆sin =
-d AB
-
+x
B
A
∆yAB
YA YB +y
∆xA
B
∆yAB XB
XA
ORys. 8.8. Związki pomiędzy azymutem, długością i przyrostami boku AB
O
AAB
K

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 203
8.4. Obliczenie azymutu i długo ści boku ze współrz ędnych
Zadanie polegające na obliczeniu azymutu i długości boku AB na podstawie danych współrzędnych jego punktów końcowych jest zamianą współrzędnych prostokątnych na biegunowe, występuje często w obliczeniach geodezyjnych i opiera się na wzorach: (8.4) i (8.5). Stosując do obliczenia azymutu wzór (8.4) otrzymujemy jednak wartość tangensa azymutu, a więc na tej podstawie nie można jeszcze jednoznacznie określić samego kąta AAB. Z tego powodu do obliczenia wartości liczbowej azymutu korzystamy z czwartaka ϕ oraz zależności pomiędzy azymutem a czwartakiem wynikających z rys. 8.7. Wybór od-powiedniego wzoru wymaga znajomości przedziału kątowego (ćwiartki), w którym wystę-puje poszukiwany azymut. Ćwiartkę tę ustalamy na podstawie znaków przyrostów ∆x, ∆y, które zgodnie z wzorami (8.6) są zgodne ze znakami funkcji trygonometrycznych azymu-tu: cos A, sin A. Każdej ćwiartce azymutu odpowiada tylko jedna kombinacja pary znaków (tabela 8.1).
Przebieg obliczenia azymutu AAB i długości dAB boku AB na podstawie współrzędnych punktów A, B obejmuje następujące etapy:
1. Obliczenie przyrostów ∆xAB, ∆yAB wg wzorów (8.2). 2. Obliczenie tangensa czwartaka ϕ z zależności:
tg ϕ ABAB
AB
y
x=
∆∆
(8.7)
3. Obliczenie wartości czwartaka ϕ na podstawie jego tangensa. 4. Ustalenie numeru ćwiartki azymutu w oparciu o znaki przyrostów (tabela 8.1). 5. Obliczenie azymutu A z zależności między azymutem A i czwartakiem ϕ, wybranej
zgodnie z ustalonym wcześniej numerem ćwiartki azymutu (tabela 8.1). 6. Obliczenie długości boku dAB wg wzoru (8.5). 7. Wykonanie obliczeń kontrolnych azymutu i długości.
Obliczenia kontrolne azymutu Kontrola obliczenia azymutu opiera się na wyznaczeniu azymutu A powiększonego
o kąt 45° (50g) i po odjęciu tego kąta, porównaniu go z azymutem z obliczenia pierwotne-go. Na podstawie wzoru na tangens sumy kątów i wzoru (8.4) możemy napisać:
( )tg tg tg
tg tg A
A
A+ ° =
+ °− ⋅ °
4545
1 45x
yx
y
∆
∆1
1∆
∆
−
+= ,
stąd:
( )tg Ax y
x yABAB AB
AB AB
+ ° =+−
45∆ ∆∆ ∆
(8.8)
Obliczenie wykonane w oparciu o wzór (8.8) dostarcza tangensa kąta (A+45°), a za-tem podobnie jak w poprzednim rachunku posłużymy się czwartakiem ψ, którego tangens określimy, stosując wzór:
ABAB
ABAB
yx
yx
∆∆∆∆ψ
−+
= tg (8.8a)

8.4. Obliczenie azymutu i długości boku ze współrzędnych 204
Dla ustalenia ćwiartki kąta (A+45°) potraktujemy znaki sumy: ∆x+∆y i różnicy: ∆x–∆y, tak samo, jak podczas obliczenia wynikowego znaki przyrostów: ∆y, ∆x. Warto przy tym zauważyć, że ćwiartka kąta (A+45°) w stosunku do ćwiartki azymutu A pozostaje bez zmian lub przechodzi w następną. Po przeliczeniu czwartaka ψ na kąt (A+45°), odej-mujemy od niego 45° (50g) i sprawdzamy, czy uzyskany kąt jest równy azymutowi otrzy-manemu z obliczenia pierwotnego. Identyczność obu wyników świadczy o poprawności rachunków.
Korzystanie ze wzoru (8.8) do kontroli obliczenia azymutu, opiera się na wcześniej wyliczonych przyrostach, a więc nie daje możliwości wykrycia ewentualnego błędu ich obliczenia. Z tego powodu można zalecić wykonywanie obliczeń kontrolnych azymutu bezpośrednio ze współrzędnych, według podanego niżej wzoru (8.9), będącego modyfika-cję wzoru (8.8):
( ) ( ) ( )( ) ( )tg AX Y X Y
X Y X YAB
B B A A
B B A A
+ ° =+ − +− − −
45 (8.9)
Ze wzoru (8.9) wynika, że tg (A+45°) równa się różnicy sum współrzędnych punk-tów A, B podzielonej przez różnicę różnic tych współrzędnych.
W ramach kontroli obliczenia długości dAB wyznaczamy długość boku AB na podsta-wie przekształconych wzorów (8.6), czyli:
dx
A
y
AABAB
AB
AB
AB
= =∆ ∆
cos sin (8.10)
Odpowiednikiem wzoru (8.10) jest podobna zależność (8.11), w której azymut A zo-stał zastąpiony przez czwartak ϕ, a zamiast przyrostów ∆x, ∆y występują ich wartości bez-względne:
ϕϕ sin
∆
cos
∆ ABABAB
yxd == (8.11)
Uwaga: Zastosowanie wzorów (8.4) i (8.7) do opracowania programu obliczenia azymutu ze współrzędnych stwarza niebezpieczeństwo zatrzymania obliczeń, gdy ∆x=0 (wystąpi błąd dzielenia przez zero). Należy więc do programu wprowadzić odpowiedni warunek lub po wcześniejszym obliczeniu ze współrzędnych długości boku, wykorzystać wzory: (8.5) i (8.6a) do wyznaczenia azymutu na podstawie funkcji sin A lub cos A.
Dość często podczas rozwiązywania zadań kontrolnych, wymagających obliczenia azymu-tów ze współrzędnych, azymuty wyrażają się okrągłymi wartościami: 0°, 90°, 180°, 270°, po-nieważ dotyczą odcinków równoległych do osi układu współrzędnych. W tych przypadkach wartość jednego z przyrostów boku jest zerowa. Rysunek 8.9 przedstawia kwadrat, którego boki są parami równoległe do osi x i y układu współ-rzędnych. Boki 1-2 i 3-4 są równoległe do osi y, toteż ich przyrosty: ∆x1-2 i ∆x3-4 są równe zero. Przy obliczaniu funkcji tg A dzielnik jest zerowy, przez co iloraz ∆y:∆x stanowi symbol nieokre-
+x
X1=X2
O
1 2
+y
X3=X4
Y1=Y4 Y2=Y3
4 3
Rys. 8.9. Azymuty boków i przekątnych

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 205
ślony, zaś w zależności od znaku drugiego przyrostu ∆y azymut A ma ustaloną wartość: 90° lub 270°, tj.: dla ∆y>0, A=90°, zaś gdy ∆y<0, A=270°, stąd A1-2 =
90°, A3-4 = 270°.
Boki równoległe do osi x posiadają przyrost ∆y = 0, a więc tangensy azymutów tych boków są także zerowe, natomiast same azymuty mogą przyjmować wartości: 0° (A4-1) i 180° (A2-3). Azymut boku jest równy zero, gdy ∆y=0, zaś ∆x>0, natomiast wynosi 180°, kiedy ∆y=0, zaś przyrost ∆x jest ujemny.
Dla przekątnej kwadratu 1-3 bezwzględne wartości przyrostów są równe, lecz ∆x ma znak minus, zaś ∆y znak plus, a więc azymut, zgodnie z tabelą 8.1 znajduje się w II ćwiart-ce. Otrzymamy zatem:
tg ϕ =1; ϕ = 45°; A1-3 = 180° – 45° = 135°. Z kolei dla przekątnej 2-4, wartości obu przyrostów są równe i ujemne, a więc, zgod-
nie z tabelą 8.1, azymut jest kątem w III ćwiartce. Otrzymamy zatem: tg ϕ =1; ϕ = 45°; A2-4 = 180° + 45° = 225°.
8.5. Symbole rachunkowe S. Hausbrandta *
Liczne zadania z rachunku współrzędnych wykazują pewne powtarzające się działa-nia matematyczne. Sposób ujednolicenia i usprawnienia obliczeń został opracowany przez S. Hausbrandta dzięki zastosowaniu wprowadzonych przez niego symboli rachunkowych. Symbole te upraszczają i systematyzują obliczenia, zwłaszcza wtedy, gdy są one wykony-wane za pomocą kalkulatora.
Podstawowym pojęciem w symbolice Hausbrandta jest forma rachunkowa prosta, stanowiąca czteroelementowy zespół liczb, ujętych w prostokątną tabelę:
dcbaf ≡ (8.12)
Forma rachunkowa złożona składa się z dwóch lub większej ilości form rachunko-wych prostych zapisanych obok siebie:
Fa b
c d
a b
c d
a b
c dn n
n n
≡ 1 1
1 1
2 2
2 2
..... (8.13)
Forma rachunkowa jest tylko sposobem zapisu liczb i nie określa żadnych działań matematycznych prowadzących do wyznaczenia konkretnej liczby. Są one możliwe tylko po wpisaniu obok formy lub jej symbolu oznaczenia funkcji formy rachunkowej.
W rachunkach geodezyjnych stosowane są następujące funkcje form rachunkowych: 1) Funkcja pierwsza (iloczyn wyznacznikowy) jest to suma wyznaczników drugiego
stopnia obliczonych z poszczególnych form rachunkowych prostych:
F1= a1d1 – b1c1+a2d2 – b2c2+...+andn – bncn = ∑(aidi - bici) (8.14)
2) Funkcja druga (iloczyn kolumnowy) jest to suma iloczynów par elementów znajdu-jących się w poszczególnych kolumnach formy rachunkowej:
F2 = a1c1+b1d1+a2c2+b2d2+...+ancn+bndn = ∑(aici+bidi) (8.15)
* Stefan Hausbrandt (1896-1971) wybitny polski geodeta, profesor Politechniki Warszawskiej, specjalizował się w rachunku wyrównawczym i metodach obliczeń geodezyjnych.

8.6. Obliczenie kąta ze współrzędnych 206
3) Funkcja zerowa (iloraz główny) jest to stosunek funkcji pierwszej do drugiej:
FF
F01
2
= (8.16)
4) Funkcje względne proste stanowią ilorazy funkcji pierwszej lub drugiej przez sumę elementów dolnego lub górnego wiersza formy rachunkowej. W zależności od tego, w którym wierszu ma nastąpić sumowanie, oznaczenie funkcji: (1) lub (2) umieszcza się u dołu lub u góry symbolu formy:
)( ;
)( ;
)( ;
)(2(2)1)1(2
)2(1
)1(iiiiiiii ba
FF
ba
FF
dc
FF
dc
FF
+=
+=
+=
+=
ΣΣΣΣ (8.17)
5) Funkcje względne kwadratowe są ilorazami funkcji pierwszej lub drugiej przez su-mę kwadratów elementów dolnego lub górnego wiersza formy. Podobnie jak w po-przedniej grupie funkcji miejsce zapisu oznaczenia funkcji wskazuje wiersz, które-go kwadraty elementów mają być zsumowane. Symbol funkcji jedynkę lub dwójkę w nawiasie kwadratowym lub małym kwadracie (np. 1 lub [ 1 ]) może być umiesz-czony u dołu lub u góry symbolu formy lub z prawej strony formy rachunkowej:
)( ;
)( ;
)( ;
)( 222[2]
221]1[
222
]2[221
]1[iiiiiiii ba
FF
ba
FF
dc
FF
dc
FF
+=
+=
+=
+=
ΣΣΣΣ (8.18)
Za pomocą podanych wyżej funkcji można zapisać wzory na rozwiązanie niektórych zadań z rachunku współrzędnych:
8.6. Obliczenie k ąta ze współrz ędnych
Zadanie obliczenia wartości kąta β na podstawie współrzęd-nych trzech punktów: C – wierzchołka kąta, L – punktu położonego na lewym ramieniu, P – punktu na prawym ramieniu, sprowadza się do obliczenia azymutów odcinków CL i CP (rys. 8.10), ramion ką-ta oraz jego wyznaczeniu z różnicy azymutów:
β = ACP – ACL (8.19)
Jeśli różnica azymutów obliczona wg wzoru (8.19) jest ujem-na, wówczas należy dodać do niej wartość kąta pełnego (360° lub 400g). Zaletą powyższego sposobu obliczenia jest przejrzystość ra-chunku i mniejsza możliwość pomyłek niż przy korzystaniu ze wzo-ru (8.20), natomiast wadą tego sposobu jest pracochłonność wynika-jąca z konieczności obliczania ze współrzędnych azymutów dwóch boków (wraz z kontrolą).
Drugi sposób obliczenia kąta β ze współrzędnych punktów: C, L, P polega na wykorzystaniu wyprowadzonego dalej wzoru (8.20). Na podstawie zależno-ści (8.19) i znanego wzoru trygonometrycznego na tangens różnicy kątów otrzymamy:
( ) tg tg1
tg tg tg tg
CLCP
CLCPCLCP AA
AAAA
⋅+−
=−=β
Rys. 8.10. Kąt jako
różnica azymutów
ramion
β C
L
P
AC
P
ACL

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 207
przy czym: CP
CPCP
CP
CLCL x
yA
x
yA
∆∆
∆∆
== tg; tg
Po podstawieniu powyższych związków do wzoru na tg β otrzymamy:
CPCL
CPCLCPCL
CPCL
CLCPCPCL
CL
CL
CP
CP
CL
CL
CP
CP
xx
yyxxxx
yxyx
x
y
x
yx
y
x
y
∆⋅∆∆⋅∆+∆⋅∆
∆⋅∆∆⋅∆−∆⋅∆
=
∆∆⋅
∆∆+
∆∆−
∆∆
=1
tg β
Po dokonaniu przekształceń algebraicznych tg β zostanie wyrażony wzorem:
CPCLCPCL
CLCPCPCL
yyxx
yxyx
∆⋅∆+∆⋅∆∆⋅∆−∆⋅∆
=β tg (8.20)
Wyraźne uproszczenie zapisu wzoru (8.20) na obliczenie kąta ze współrzędnych uzy-skamy, po zastosowaniu omówionych w ust. 8.5 symboli rachunkowych S. Hausbrandta:
tg β =∆ ∆∆ ∆
x y
x yCL CL
CP CP 0
(8.21)
Podobnie jak podczas obliczania azymutu ze współrzędnych do wyznaczenia kąta β można korzystać z pośrednictwa czwartaka ϕ, traktując znaki licznika i mianownika ułam-ka we wzorze (8.20) jako znaki przyrostów współrzędnych ∆y, ∆x.
Zaletą powyższego sposobu jest obliczenie funkcji tg β, a następnie wartości kąta β bezpośrednio z przyrostów współrzędnych, bez konieczności określania wartości azymu-tów obu ramion, natomiast wadą jest nieco złożona procedura ustalenia czwartaka, ćwiart-ki i samego kąta.
8.7. Obliczanie współrz ędnych punktów posiłkowych
a) b) c)
Rys. 8.11. Punkty posiłkowe: a) na prostej, b) na domiarze prostokątnym, c) na domiarze
biegunowym
Punktami posiłkowymi nazywamy dodatkowe punkty osnowy pomiarowej, których
nawiązanie do punktów o znanym położeniu, pozwalające na wyznaczenie współrzędnych punktów posiłkowych, jest realizowane za pomocą najprostszych konstrukcji geometrycz-nych (rys. 8.11) polegających na:
a) wytyczeniu punktu pośredniego na boku osnowy i pomiarze odległości l (miary bieżącej) do jednego z punktów znanych na początku lub końcu boku (rys. 8.11 a),

8.7. Obliczanie współrzędnych punktów posiłkowych 208
b) rzutowaniu prostokątnym punktu na bok osnowy za pomocą węgielnicy lub teodoli-tu i zmierzenie domiarów prostokątnych: odciętych l i rzędnych h,
c) zmierzenie z punktu znanego do punktu posiłkowego domiarów biegunowych α, d.
8.7.1. Obliczenie współrzędnych punktu na prostej
Zadanie obliczenia współrzędnych punktu pośredniego (posiłkowego) P, położonego na prostej AB, polega na wyznaczeniu jego współrzędnych XP, YP na podstawie znanych współrzędnych punktów skrajnych: XA
, YA ; XB, YB i pomierzonej odległości punktu P od jednego z tych punktów (lAP lub lBP). Z zadaniem tym mamy do czynienia bardzo często podczas zagęszczania poziomej osnowy pomiarowej, szczególnie zaś wtedy, gdy do zdję-cia szczegółów sytuacyjnych wykorzystuje się metodę ortogonalną. Z punktów posiłko-wych na bokach osnowy mogą następnie wychodzić linie pomiarowe i ciągi sytuacyjne niższych rzędów. Zagadnienie zagęszczania osnowy pomiarowej zostanie przedstawione szerzej podczas omawiania osnowy dla zdjęcia szczegółów sytuacyjnych.
Z rys. 8.12 i wzorów (8.3) wynikają związki:
XP = XA + ∆xAP ; YP = YA + ∆yAP.
Zgodnie z wzorami (8.6) przyrosty: ∆xAP, ∆yAP obli-czymy z zależności:
∆xAP= lAP ⋅cos AAP ; ∆yAP = lAP ⋅sin AAP
Azymuty boków AP i AB są identyczne, ponieważ oba odcinki znajdują się na tej samej prostej i mają ten sam zwrot, stąd:
cos cos cos A A Ax
dAB APAB
AB
= = =∆
oraz
sin sin sin A A Ay
dAB APAB
AB
= = =∆
Funkcje trygonometryczne sinus, cosinus azymutu AAB: obliczone według wzorów (8.6 a) noszą nazwę współczynników kierunkowych boku AB.
Ostateczne wzory na obliczenie współrzędnych punktu posiłkowego P na prostej AB przyjmą postać:
XP = XA + lAP ⋅ cos AAB
YP = YA + lAP ⋅ sin AAB
Odległość lAP , stanowi tzw. miarę bieżącą punktu P. Po jej odmierzeniu należy kon-tynuować wyznaczanie dalszych miar bieżących do następnych punktów posiłkowych i zakończyć pomiar odległości w punkcie B, w wyniku czego otrzymujemy miarę bieżącą
końcową, czyli długość boku AB – pomABd „pomierzoną”. Miara ta powinna być zgodna
z długością – oblABd „obliczoną”, uzyskaną ze znanych współrzędnych punktów A, B
w oparciu o wzór (8.5). Zgodnie z instrukcją techniczną G-4 (wyd. IV z r. 2002) różnica pomiędzy długością pomierzoną i obliczoną, czyli odchyłka fd dla linii pomiarowych nie może przekraczać odchyłki dopuszczalnej obliczonej ze wzoru:
(8.22)
Rys. 8.12. Współrzędne punktu
na prostej
+x
+y
XB
XP
XA
YP YB YA
K
∆∆∆∆yAB
∆yAP
∆xA
P
B
A
P K′ ∆yAP
O
lAP
∆∆ ∆∆xA
B
AAB
∆∆∆∆yAB

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 209
fdmax = 0,07 m + 50 mm/km (8.23)
Dla linii pomiarowej o długości d = 200 m odchyłka fdmax wyniesie 0,08 m, zaś dla d = 600 m fdmax = 0,10 m.
Jeśli otrzymana odchyłka fd nie przekracza odchyłki dopuszczalnej, wtedy poprawia-my wszystkie miary bieżące znajdujące się na danym boku o poprawkę v obliczoną zgod-nie z założeniem, że błąd określenia miary bieżącej wzrasta wprost proporcjonalnie do jej długości. Poprawka vi i-tej miary bieżącej l i wyniesie więc:
vf
dli
d
ABi= − ⋅ (8.24)
Pomierzona długość końcowa, będąca miarą bieżącą punktu B, otrzyma zatem po-prawkę równą pełnej odchyłce fd ze znakiem minus, przez co miara końcowa zostanie do-prowadzona do długości dAB obliczonej ze współrzędnych.
Kontrolę obliczenia współrzędnych punktu P może stanowić rachunek dla boku od-wrotnego, dla którego punktem wyjściowym jest punkt B. Do obliczenia wykorzystamy zmodyfikowane wzory (8.22) w postaci:
XP = XB + lBP ⋅ cos ABA
YP = YB + lBP ⋅ sin ABA
We wzorach (8.25) występuje azymut boku odwrotnego ABA, którego funkcje: cos, sin mają przeciwne znaki w porównaniu z analogicznymi funkcjami azymutu wyjściowego AAB. Wynika to ze zmiany znaków przyrostów ∆xBA , ∆yBA, które w porównaniu do przyro-stów boku wyjściowego AB mają również znaki przeciwne. Potrzebną do obliczeń długość lBP otrzymamy jako różnicę:
lBP = dAB – lAP (8.26)
Dla większej liczby punktów pośrednich położonych na danym boku AB stosowanie powyższej metody kontroli jest zbyt pracochłonne, toteż lepiej jest korzystać z przedsta-wionego dalej sposobu rachunku, polegającego na wprowadzeniu do obliczeń przyrostów domiarów prostokątnych zamiast samych domiarów.
8.7.2. Obliczenie współrzędnych punktu na domiarze prostokątnym
Podczas zagęszczania poziomej osnowy pomiarowej często stosowanym sposobem utworzenia dodatkowego punktu tej osnowy jest punkt P położony na domiarze prostokąt-nym, czyli na końcu prostopadłej PP′, otrzymanej po zrzutowaniu węgielnicą punktu P i znalezieniu punktu pośredniego P′ na prostej AB utworzonej przez punkty A, B o znanych współrzędnych. Dla określenia współrzędnych punktu P należy pomierzyć domiary pro-stokątne tego punktu: odciętą l równą długości odcinka AP′ i rzędną h, czyli długość od-cinka P′P (rys. 8.13). Punkt na domiarze prostokątnym może zastępować często stosowaną w praktyce konstrukcję ciągu wiszącego z pojedynczym bokiem, nazywanego popularnie „bagnetem”. W tym ostatnim przypadku niezbędne jest korzystanie z teodolitu, którym trzeba pomierzyć kąt nawiązania ciągu, natomiast do wyznaczenia punktu na domiarze prostokątnym wystarcza użycie węgielnicy i ruletki.
Oprócz pomiaru długości odcinków: AP′ i P′P należy na szkicu polowym wyraźnie zaznaczyć, po której stronie prostej AB występuje prostopadła z wyznaczanym punktem P.
(8.25)

8.7. Obliczanie współrzędnych punktów posiłkowych 210
Z trójkąta prostokątnego K′P′P (rys. 8.13) wynikają następujące zależności:
K′P′ = – ∆xP′P = h ⋅ sin A K′P = + ∆yP′P = h ⋅ cos A
Długość odcinka K′P′ jest zawsze do-datnia, niezależnie od położenia domiaru, lecz przyrost ∆xP′P dla rzędnej h w prawo (jak na rys. 8.13) jest ujemny, ponieważ współrzędna X maleje podczas przechodze-nia z punktu P′ do punktu P. Gdyby rzędna h była skierowana w lewo, wtedy przyrost ∆xP′P jako dodatni powodowałby wzrost współrzędnej X wzdłuż odcinka P′P.
Przyrosty współrzędnych pomiędzy punktami A-P wyrażają wzory:
∆xAP = l ⋅ cos A – h ⋅ sin A
(8.27) ∆yAP =
l ⋅ sin A + h ⋅ cos A
Na podstawie przyrostów: ∆xAP, ∆yAP wyznaczymy współrzędne punktu P:
XP = XA + ∆xAP = XA + ∆xAP′ + ∆xP′P YP = YA + ∆yAP = YA + ∆yAP′ + ∆yP′P
a po podstawieniu związków (8.27) otrzymamy:
XP = XA
+ l ⋅ cos A – h ⋅ sin A (8.28)
YP = YA
+ l ⋅ sin A + h ⋅ cos A
W dwóch pierwszych członach powyższych wzorów zawarte jest obliczenie współ-rzędnych punktu P′ (spodka prostopadłej). Kolejny, trzeci składnik wzorów to iloczyny wyrażające przyrosty współrzędnych wzdłuż odcinka prostopadłego P′P: ∆xP′P, ∆yP′P .
Wzory (8.28) służą do wyznaczania współrzędnych punktu P przy obu możliwych położeniach domiaru tj. z lewej i prawej strony boku osnowy pomiarowej. Przy podsta-wianiu do nich wartości rzędnej h, należy uwzględnić jej znak w myśl zasady: Rzędna h w prawo otrzymuje znak plus, natomiast rzędna h w lewo – znak minus.
Odcięta l jest prawie zawsze dodatnia. Jedyny wyjątek, gdy trzeba jej przypisać znak minus zachodzi wtedy, gdy miara bieżąca punktu wypada na wstecznym przedłużeniu linii pomiarowej AB poza jej punkt początkowy A (z miarą 0,00). Domiary l, h są współrzędny-mi w prawoskrętnym układzie prostokątnym, płaskim, w którym linia pomiarowa AB jest osią odciętych o początku układu w punkcie wyjściowym A, natomiast dodatni kierunek osi rzędnych wychodzi z punktu A i biegnie w prawo (rys. 8.14). Zadanie wyznaczenia współrzędnych punktu na prostej można uważać za szczególny przypadek punktu na do-miarze, którego rzędna h jest równa zero.
Podobnie jak podczas obliczania współrzędnych punktu na prostej kontrolę rachunku może stanowić powtórne obliczenie współrzędnych punktu P po zmianie kierunku obli-czenia na odwrotny tzn. z B do A.
XP′ K
∆xP
′P
AAB
l
Rys. 8.13. Punkt na domiarze prostokątnym
XB
XA
YA YB YP′
A
B
P
P′
∆yP′P
YP
XP
O
∆yAP′
+x
+y
AAB ∆x
P′P
∆yP′P
∆xA
P′
K′
∆yAP′
h(+)

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 211
Podane wcześniej związki (8.27) na obliczenie przyrostów współrzędnych ∆xAP, ∆yAP punktu na domiarze prostokątnym można zapisać w postaci wzoru zapisanego za pomocą symboli rachunkowych S. Hausbrandta:
( )2,1
cossin,
AA
hlyx APAP =∆∆ (8.29)
Obecność obok siebie dwóch symboli funkcji oddzielonych przecinkiem oznacza, że funkcja pierwsza odnosi się do obliczenia ∆xAP, zaś druga – do ∆yAP
.
8.7.3. Obliczenie współrzędnych grupy punktów posiłkowych
Przy dużej liczbie punktów położonych na prostej i domiarach prostokątnych, odnie-sionych do jednego boku osnowy pomiarowej, podane wcześniej dla pojedynczych punk-tów sposoby obliczania współrzędnych i kontroli rachunku są zbyt pracochłonne z uwagi na konieczność prowadzenia osobnego rachunku dla każdego punktu posiłkowego.
Podobnie jak ma to miejsce podczas obliczania ciągów poligonowych, przyrosty wy-stępujące we wzorach: (8.27) i (8.29), liczone względem tego samego punktu początkowe-go A, można w obu omówionych wcześniej rodzajach zadań zastąpić przyrostami domia-rów ∆l, ∆h obliczanymi dla odcinków łączących sąsiednie punkty posiłkowe. Obliczenie tych przyrostów jest przeprowadzane tak samo jak przyrostów współrzędnych ∆x, ∆y tzn. tworzone są różnice, w których od domiaru punktu następnego N odejmowany jest domiar punktu poprzedniego P:
∆lPN = l N – lP
(8.30) ∆hPN = hN – hP
Wzory (8.27), (8.29) można teraz zmodyfikować do postaci:
∆xPN = ∆lPN ⋅ cos A – ∆hPN ⋅ sin A (8.31)
∆yPN = ∆lPN ⋅ sin A + ∆hPN ⋅ cos A albo
( )2,1
cossin,
AA
hlyx PNPN
PNPN
∆∆=∆∆ (8.32)
Nietrudno udowodnić, że obliczane w ten sposób przyrosty domiarów prostokątnych ∆l, ∆h oraz przyrosty współrzędnych ∆x, ∆y muszą spełniać niżej zestawione warunki, któ-re można wykorzystać do kontroli sumowych poszczególnych etapów obliczeń:
[∆l] = dAB ; [∆h] = 0 ; [∆x] = ∆xAB ; [∆y] = ∆yAB (8.33)
Rys. 8.14. Układ współrzędnych prostokątnych z odciętymi l i rzędnymi h
+h
54 55
54A
265,32
121,14
0,00
16,39
l=121,14 h=-16,39
+l

8.7. Obliczanie współrzędnych punktów posiłkowych 212
Nawiasy kwadratowe w powyższych wzorach oznaczają sumy wielkości oznaczo-nych poszczególnymi symbolami.
Na rys. 8.15 przedstawiono dane do obliczenia współrzędnych grupy punktów posił-kowych (1-5). Rozwiązanie przykładu zamieszczono obok rysunku.
Zadanie obliczania współrzędnych punktu na podstawie domiarów prostokątnych stanowi także najprostszy przypadek transformacji współrzędnych (przy dwóch punktach dostosowania), czyli przeliczania współrzędnych z jednego układu zwanego pierwotnym, na inny układ zwany wtórnym. Rolę układu pierwotnego pełni układ współrzędnych linii pomiarowej A l h ze współrzędnymi l, h, natomiast układem wtórnym jest układ Oxy, w którym wyrażone są współrzędne X, Y punktów znanych A, B. Punkty te pełnią rolę punk-tów dostosowania, ponieważ ich współrzędne są znane w obydwu układach. Azymut AAB linii pomiarowej jest odpowiednikiem kąta skręcenia układu pierwotnego względem ukła-du wtórnego. Współrzędne punktu A (początek układu pierwotnego) wynoszą: lA = 0, hA = 0 w układzie pierwotnym oraz XA, YA w układzie wtórnym. Punkt końcowy B w układzie pierwotnym ma współrzędne: lB = dAB, hB = 0 oraz XB, YB w układzie wtórnym.
8.7.4. Obliczenie współrzędnych punktu wyznaczonego metodą biegunową
Określenie położenia sytuacyjnego punktu P metodą biegunową, w nawiązaniu do boku AB osnowy pomiaro-wej, polega na wyznaczeniu domiarów biegunowych: odle-głości poziomej AP = dAP oraz kąta poziomego BAP = α, stanowi więc zamianę współrzędnych biegunowych na prostokątne. Długość dAP to odległość szukanego punktu P od stanowiska A teodolitu, zaś kąt α jest zawarty pomiędzy bokiem AB osnowy a celową AP (rys. 8.16).
Na rozwiązania tego zadania składają się następujące czynności rachunkowe:
1) wyznaczenie azymutu boku AB ze współrzędnych, 2) obliczenie azymutu boku AP:
AAP = AAB+α lub AAP= ABA+α – 200g 3) obliczenie przyrostów boku AP:
∆xAP = dAP⋅ cos AAP ; ∆yAP = dAP⋅ sin AAP 4) obliczenie współrzędnych punktu P:
XP = XA + ∆xAP ; YP = YA + ∆yAP
Rys. 8.16. Punkt na domiarze
biegunowym
XB
XA
YA YB YP
A
B
P XP
O
+x
+y
AAB ∆xAP
∆yAP
α
AAP
dAP
AAP
Rys. 8.15. Domiary prostokątne grupy punktów posiłkowych
5
1 541541541541 542542542542
4
3
2 15,68
22,47
187,50
124,56
78,12
12,40
47,93
0,00
34,75
23,94
X= 4 950,12 Y= 7 251,84
X= 4 964,44 Y= 7 064,95
(A) (B)
Domiary prostokątne Przyrosty domiarów Bok osnowy Przyrosty
współrzędnych Współrzędne
punktów
Ozn
acz
enia
p
unk
tów
Odcięta l
Rzędna h
±
odciętej ∆ l
±
rzędnej ∆ h
±
∆xAB ∆yAB
dAB obl.
fd , fd max
Współczynniki kierunkowe
cos A sin A
∆ x= ∆l⋅cos A
–∆h⋅sin A ±
∆ y= ∆l⋅sin A
+∆h⋅cos A ±
X Y Ozn
acze
nia
p
unk
tów
1 2 3 4 5 6 7 8 9 10 11 12
541 0,00 0,00 4950,12 7251,84 541 + 34,74 0,00
+14,32; -186,89 187,438 m
+0,062; 0,08
+0,0763986 -0,9970773
+ 2,65 – 34,64 1
-1
34,75 0,00 4952,77 7217,20 1 + 13,17 – 15,68 – 14,62 – 14,33
2 -2
47,93 - 15,68 4938,15 7202,87 2 0,00 – 6,79 – 6,77 – 0,52
3 -2
47,93 - 22,47 4931,38 7202,35 3 + 30,19 + 46,41 + 48,57 – 26,55
4 -2
78,12 + 23,94 4979,95 7175,80 4 + 46,42 – 11,54 – 7,96 – 47,17
5 -4
124,56 + 12,40 4971,99 7128,63 5 + 62,92 – 12,40 – 7,55 – 63,68
542 -6
187,50 0,00 4964,44 7064,95 542
+ 187,44 0,00 + 14,32 – 186,89

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 213
8.8. Obliczenie współrz ędnych punktów przeci ęć prostych
8.8.1. Obliczenie współrzędnych punktu przecięcia boku osnowy z ramką sekcyjną
Mapy topograficzne do celów gospodarczych i mapa zasadnicza (podstawowa mapa kraju) są sporządzane w podziale sekcyjnym, prostokątnym. Pojedynczy arkusz mapy za-sadniczej formatu A1 (594×841 mm), zwany sekcją mapy, zawiera w sobie prostokąt ram-ki sekcyjnej o wymiarach 500×800 mm, ograniczający rysunek danego arkusza mapy. Pio-nowe ramki sekcyjne są równoległe do osi x układu współrzędnych prostokątnych, zaś ramki poziome − równoległe do osi y.
Miejsce pomiędzy krawędziami arkusza a ramką jest podzielone na pola przeznaczo-ne na tzw. opisy pozaramkowe. Rysunek mapy zawarty wewnątrz ramki sekcyjnej danego arkusza wykazuje ciągłość z rysunkiem znajdującym się na arkuszach sąsiednich. Oznacza to, że sytuacja przedstawiona na każdej sekcji jest kontynuowana na sekcjach przyległych bez powtórzeń przedstawianych obiektów oraz luk między nimi.
Podczas sporządzania mapy należy najpierw nanieść osnowę geodezyjną, a następnie punkty sytuacyjne zdjętych szczegółów. Po wykreśleniu połączeń punktów i wprowadze-niu znaków umownych zostaje utworzony rysunek mapy. Zespół prac graficznych i obli-czeń pomocniczych związanych z wykonaniem mapy nosi nazwę kartowania.
Często zdarza się, że pojedynczy bok osnowy jest położony na dwóch lub nawet trzech sekcjach, przecinając jedną lub dwie ramki sekcyjne (rys. 8.17). Przed nanoszeniem szczegółów sytuacyjnych konieczne jest wykreślenie na każdym arkuszu mapy odpowied-niego fragmentu boku osnowy, do czego niezbędna jest znajomość współrzędnych punk-tów jego przecięć z ramką.
Z podobieństwa trójkątów ABB′, ANN′, AMM′ (rys. 8.17), wynikają związki:
tg Ay
x
y
x
y
xABAB
AB
AM
AM
AN
AN
= = =∆∆
∆∆
∆∆
(8.34)
Punkty przecięcia M i N położone na linii ramki mają zawsze jedną współrzędną zna-ną, równą stałej odległości ramki od tej osi układu, do której dana ramka jest równoległa.
+y
+x prostokąt ramki sekcyjnej
M
A
B
∆xA
M
∆yAM
∆yAB
XR=XM
YR=YN
∆xA
B
∆xA
N
YM YA
XN
XA
YB
XB
Rys. 8.17. Punkty przecięcia boku osnowy z ramką sekcyjną
∆yAN
B′ M′ N′
N

8.8. Obliczenie współrzędnych punktów przecięć prostych 214
Dla wszystkich punktów leżących na ramce poziomej, równoległej do osi y jest to wartość XR , natomiast dla punktów na ramce pionowej, która jest równoległa do osi x, stałą i znaną współrzędną jest YR. Można więc z góry zapisać: XM =XR oraz YN =YR. Po wprowadzeniu znanych współrzędnych ramek do wzoru (8.34) i prostych przekształceniach otrzymamy:
∆yAM = tg AAB ⋅(XR – XA) oraz ∆xAN = ( )1
tg AY Y
ABR A⋅ −
Ostateczny wzór dla przecięcia z ramką poziomą przyjmie postać:
YM = YA + (XR – XA)⋅ tg AAB (8.35)
Szukana współrzędna XN dla punktu przecięcia boku AB z ramką pionową wyniesie:
XN = XA + (YR – YA)⋅ ctg AAB (8.36)
Występujące we wzorach (8.35) i (8.36) funkcje: tg AAB oraz ctg AAB obliczymy z przyrostów współrzędnych boku AB:
AB
ABAB x
yA
∆∆
= tg ; AB
ABAB y
xA
∆∆
= ctg
Kontrola naniesienia punktu przecięcia boku osnowy z ramką sekcyjną polega na gra-ficznym sprawdzeniu długości odcinków AM lub AN wyliczonych uprzednio ze współ-rzędnych.
8.8.2. Obliczenie współrzędnych punktu przecięcia się prostych
Konieczność obliczania współrzędnych punktu przecięcia się prostych występuje często przy geodezyjnym opracowaniu inwestycji lub planów zagospodarowania prze-strzennego. Prostymi, dla których wyznacza się punkty przecięcia, są najczęściej: osie dróg, ulic, budowli, linie obrysów budynków, granice działek itp. Proste te są określone poprzez pary punktów o znanych współrzędnych.
Na rys. 8.18 pokazane są dwie proste: AB i CD, przecinające się w punkcie P, który dla obydwu prostych jest punktem wspólnym. Punkty: A, B, C, D wyznaczające proste mają znane współrzędne prostokątne, płaskie X, Y.
I sposób:
Na podstawie wzoru (8.4) na tangens azymutu mo-żemy zapisać następujące równania:
Dla prostej AB:
tg AY Y
X X
Y Y
X X
Y Y
X XABB A
B A
P A
P A
B P
B P
= = −−
= −−
= −−
λ (8.37)
Dla prostej CD:
tg AY Y
X X
Y Y
X X
Y Y
X XCDD C
D C
P C
P C
D P
D P
= = −−
= −−
= −−
µ (8.38)
Wartości funkcji: tg AAB = λ oraz tg ACD
= µ nazywamy współczynnikami kierunko-wymi prostych. Z przekształceń równań (8.37) i (8.38) można uzyskać cztery związki określające współrzędna YP, wyrażone poprzez wielkości znane i niewiadomą XP:
A D
C B
P
Rys. 8.18. Przecięcie prostych

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 215
YP= YA + λ (XP – XA) ; YP = YC + µ (XP – XC) (8.39) oraz
YP= YB + λ (XP – XB) ; YP= YD + µ (XP – XD) (8.40)
Po zrównaniu stronami pierwszej pary równań i wyliczeniu XP otrzymamy:
XY Y X X
PC A A C= − + ⋅ − ⋅
−λ µλ µ
(8.41)
Podobne czynności wykonane dla drugiej pary równań (8.40) dostarczą zależności:
XY Y X X
PD B B D= − + ⋅ − ⋅
−λ µλ µ
(8.42)
Obliczenie współrzędnych punktu przecięcia się dwóch prostych w oparciu o powyż-sze związki rozpoczynamy od obliczenia współczynników kierunkowych: λ, µ, po czym obliczamy współrzędną XP za pomocą wzoru (8.41) i kontrolujemy poprawność obliczenia, korzystając z drugiego wzoru (8.42).
Współrzędną YP obliczamy i sprawdzamy za pomocą jednej z par wzorów (8.39) lub (8.40), wstawiając do nich wyliczoną wcześniej niezaokrągloną wartość XP.
II sposób:
Wychodząc ze wzorów: (8.37) i (8.38) możemy także zapisać równania:
YP − λ·XP = YA − λ·XA
YP − µ·XP = YC − µ·XC
Wyrażenia znajdujące się na prawych stronach powyższych równań zawierają znane wielkości, toteż przyjmiemy dla nich oznaczenia:
YA − λ·XA = c1
(8.44) YC − µ·XC = c2
Po wprowadzeniu tych oznaczeń do równań (8.43) otrzymamy:
c1 = YP − λ·XP
c2 = YP − µ·XP
Po odjęciu powyższych równań stronami utworzymy formułę do obliczenia współ-rzędną XP, zaś po jej podstawieniu do pierwszego równania otrzymamy wzór na współ-rzędną YP.
µλ −−
= 12 ccX P
(8.45)
µλµλ
−⋅−⋅
= 12 ccYP
(8.43)

8.8. Obliczenie współrzędnych punktów przecięć prostych 216
III sposób:
Podczas obliczania większej liczby przecięć wygodniej jest posługiwać się znanymi z geometrii analitycznej równaniami prostych w postaci ogólnej:
dla prostej 1 (AB): a1⋅X + b1⋅Y + c1 = 0 (8.46)
dla prostej 2 (CD): a2⋅X + b2⋅Y + c2 = 0 (8.47)
Równania (8.37) i (8.38) prostych przechodzących przez dwa znane punkty można zapisać w postaci wyznacznikowej:
0=∆∆
−−
ABAB
APAP
xy
XXYY (8.48)
0=∆∆
−−
CDCD
CPCP
xy
XXYY (8.49)
Przejście do ogólnych równań prostych 1, 2 uzyskamy po częściowym rozwinięciu powyższych wyznaczników:
Y x X yY X
y xY x X y
Y X
y xP AB P ABA A
AB ABP CD P CD
C C
CD CD
⋅ − ⋅ +− −
= ⋅ − ⋅ +− −
=∆ ∆∆ ∆
∆ ∆∆ ∆
0 0 oraz
Wynikają stąd wzory na współczynniki równań ogólnych (8.46), (8.47) obu prostych:
a1= – ∆yAB ; b1= + ∆xAB ; c1 =− −Y X
y xA A
AB AB∆ ∆ (8.50)
a2= – ∆yCD ; b2= + ∆xCD ; c2 = − −Y X
y xC C
CD CD∆ ∆ (8.51)
Współrzędne punktu P obliczymy po rozwiązaniu układu równań (8.46), (8.47), sto-sując metodę przeciwnych współczynników. Wzory na niewiadome: XP , YP w postaci al-gebraicznej i wyznacznikowej przyjmą postać:
22
11
22
11
1221
2112
22
11
22
11
1221
1221 ; (8.52)
ba
ba
ca
ca
baba
cacaY
ba
ba
cb
cb
baba
cbcbX PP −=
⋅−⋅⋅−⋅
=+=⋅−⋅⋅−⋅
= (8.53)
Kontrola obliczenia współrzędnych punktu przecięcia się dwóch prostych polega na podstawieniu obliczonych wartości: XP
, YP do wyjściowych równań prostych (8.46), (8.47) lub (8.48), (8.49) i sprawdzeniu ich spełnienia, czyli zerowania się pary równań algebra-icznych lub obu wyznaczników. Rozbieżności lewych stron równań od zera są związane z dokładnością obliczenia współrzędnych punktu P. Jeśli współrzędne punktu przecięcia zaokrąglono do 0,01 m, wtedy rozbieżności zerowania równań są rzędu ±1 m2, zaś przy za-okrągleniach do 0,001 m odchylenia od zera nie przekraczają na ogół ±0,1 m2.

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 217
Zaletą opisanego wyżej sposobu obliczenia jest otrzymywanie obydwu niewiado-mych XP, YP niezależnie od siebie, a nie jak w sposobie I obliczanie niewiadomej YP z udziałem niewiadomej XP obarczonej błędem zaokrąglenia wyniku.
IV sposób:
Zadanie obliczenia współrzędnych punktu przecięcia się prostych można rozwiązać, wykorzystując kątowe wcięcie w przód (rys. 8.19). W tym celu ze współrzęd-nych punktów: A, B, C, D należy obliczyć minimum jedną parę kątów: 1, 2; 3, 4; 5, 6 lub 7, 8. Każda z nich umoż-liwia sprowadzenie omawianego zadania do pojedyncze-go wcięcia w przód, którego rozwiązanie (patrz ust. 8.10.1) dostarczy współrzędnych punktu P. Dla kontroli rachunku wskazane jest dodatkowe obliczenie współrzęd-nych punktu P za pomocą drugiego wcięcia.
V sposób:
Oprócz zaznaczonych wyżej kątów ze współrzędnych punktów: A, B, C, D można także obliczyć wybrane długości boków lub przekątnych czworoboku ABCD, a następnie z twierdzenia sinusów w określonym trójkącie jedną lub więcej odległości: AP, BP, CP, DP. Na podstawie odpowiedniego zestawu elementów geometrycznych obliczenie współrzęd-nych punktu przecięcia prostych daje się wtedy sprowadzić do typowych zadań geodezyj-nych takich jak: wcięcie liniowe, punkt na prostej lub ciąg wiszący (bagnet).
8.9. Obliczanie ci ągów poligonowych, sytuacyjnych
8.9.1. Podstawowe pojęcia z poligonizacji
Poligonizacja stanowi metodę i jednocześnie technologię określania położenia punk-tów osnowy poziomej nazywanych punktami poligonowymi, będących wierzchołkami wie-loboków zamkniętych lub otwartych, w których mierzy się kąty poziome i długości bo-ków. Wyniki tych pomiarów oraz znane współrzędne punktów nawiązania ciągów umoż-liwiają obliczenie współrzędnych prostokątnych punktów poligonowych.
Ciąg poligonowy jest wielobokiem otwartym lub zamkniętym, którego wierzchołki (punkty załamania) są punktami poziomej osnowy geodezyjnej. W ciągu obserwacjami są kąty wierzchołkowe i długości boków wieloboku. Ciągi mogą występować pojedynczo lub zespołowo, tworząc sieci poligonowe.
Sieć poligonowa stanowi zespół powiązanych z sobą ciągów poligonowych, łączą-cych się w tzw. punktach węzłowych, czyli punktach wspólnych, w których schodzą się co najmniej trzy równorzędne ciągi poligonowe.
Ciągi sytuacyjne są ciągami poligonowymi zakładanymi w ramach poziomej osnowy pomiarowej, dla potrzeb zdjęcia szczegółów sytuacyjnych i spełniającymi wymagania do-kładnościowe przewidziane dla tej osnowy.
W zależności od przeznaczenia osnowy poligonowej i dokładności jej pomiaru roz-różniano dawniej: poligonizację techniczną i precyzyjną. Poligonizacja techniczna stano-wiła szczegółową i pomiarową osnowę geodezyjną dla pomiarów sytuacyjnych, natomiast poligonizacja precyzyjna, zastępująca niegdyś triangulację niższych rzędów, odznaczała się długimi bokami ciągów i wysoką dokładnością pomiaru oraz była przeznaczona do
Rys. 8.19. Kąty wcięć w przód
A D
C B
P
1 2
4
3
6 5 7
8

8.9. Obliczanie ciągów poligonowych, sytuacyjnych 218
nawiązywania osnów szczegółowych niższych klas i osnów pomiarowych. Obecnie po wprowadzeniu jednolitej klasyfikacji osnowy poziomej podział ten nie jest już używany.
Ze względu na ksz ta ł t ciągi poligonowe dzielą się na zamknięte i otwarte. Przyjmując jako kryterium podziału sposób nawiązan ia , rozróżniamy ciągi:
a) niezależne (bez nawiązania), b) nawiązane jednopunktowo (wiszące), c) nawiązane dwupunktowo (obustronnie).
Zgodnie z PN-86/N-02207: „Nawiązanie geodezyjne jest to zespół czynności pomia-rowych i obliczeniowych mających na celu określenie współrzędnych punktów wyznacza-nych w układzie współrzędnych punktów nawiązania”.
W ciągu nawiązanym wyznaczane punkty poligonowe są połączone z punktami na-wiązania (o znanych współrzędnych X, Y) za pośrednictwem elementów nawiązujących: boków i kątów nawiązania. Elementy nawiązania służą do geometrycznego przeniesienia współrzędnych z istniejącej osnowy poziomej na nowo zakładane punkty poligonowe.
Nawiązanie ciągu poligonowego, otwartego zawierające z każdej strony ciągu oby-
dwa elementy nawiązujące, nosi nazwę nawiązania pe łnego . Jeśli na jednej ze stron ciągu otwartego nie ma pary punktów nawiązania, wówczas możliwe jest także nawiązanie niepełne. Na rys. 8.20 d pokazano ciąg otwarty bez nawiązania kątowego z jednej strony oraz ciąg bez nawiązania kątowego z obu stron. Posiada on tylko nawiązanie liniowe i od metody rachunku nazywany jest czasem ciągiem wliczeniowym.
8.9.2. Obliczenie ciągów otwartych, wiszących
W ciągu poligonowym, otwartym wyznaczane punkty poligonowe są jednostronnie lub obustronnie połączone z punktami nawiązania za pośrednictwem elementów nawiązu-jących: boków i kątów nawiązania.
Bok nawiązania (rys. 8.21) jest odcinkiem zawartym pomiędzy punktem nawiązania danego ciągu a najbliższym punktem poligonowym, zaś kąt nawiązania (rys. 8.21) jest ką-tem mierzonym na bliższym punkcie nawiązania. Jego jedno ramię stanowi bok nawiąza-nia, zaś drugie ramię – tzw. bok kierunkowy (orientacyjny) utworzony przez punkt nawią-
Rys. 8.20. Rodzaje ciągów poligonowych: a) zamknięty, niezależny, b) otwarty, wiszący,
c) otwarty, obustronnie nawiązany z nawiązaniem pełnym, d) otwarty z nawiązaniem niepełnym
(bez nawiązania kątowego na końcu), e) otwarty, obustronnie bez nawiązania kątowego.
A
B
1 2
1 2
3
4
6
5
A
B
1 2
3
D
C
Oznaczenia: - punkt nawiązania - punkt poligonowy - pomierzona długość boku - celowa dwustronna - celowa jednostronna
B 1
2 3
C
a) b) c)
A
B
1 2
3
C
c)
d) e)

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 219
zania (wierzchołek tego kąta) i sąsiedni punkt osnowy wyższej klasy w stosunku do danego ciągu poligonowego.
Nawiązanie ciągu poligonowego za-wierające z każdej strony ciągu po dwa elementy nawiązujące (kątowy i liniowy) nosi nazwę nawiązania pełnego. Podczas projektowania osnowy pomiarowej, zwłaszcza w trudnych warunkach tereno-wych, dopuszcza się jednak zakładanie ciągów otwartych, nawiązanych w sposób niepełny lub ciągów nawiązanych jedno-stronnie (jednopunktowo), zwanych także ciągami wiszącymi (rys. 8.20 b, 8.21). Ciąg wi-szący nie daje jednak możliwości kontroli zarówno pomiaru jak i obliczeń, ponieważ nie zawiera obserwacji nadliczbowych. Z tego powodu ilość punktów i boków tego ciągu (łącznie z bokiem nawiązania) nie może być większa od dwóch.
W zależności od przyjętego kierunku obliczenia i strony, po której w ciągach poligo-nowych położone są kąty wierzchołkowe wyróżniamy kąty: lewe α i prawe β. Dla ciągu wiszącego, przedstawionego na rys. 8.21 można prowadzić obliczenia tylko w kierunku wskazanym strzałką, zgodnym z następstwem punktów: B, 1, 2, a więc zaznaczone kąty występują po lewej stronie ciągu, czyli są kątami lewymi.
Ob l iczen ie c iągu wiszącego przebiega podobnie jak podane wcześniej obli-czenie współrzędnych punktu zdjętego metodą biegunową. Kolejność czynności rachun-kowych jest następująca:
1. Obliczenie azymutu boku AB ze współrzędnych (z kontrolą).
2. Obliczenie azymutów boków: B-1, 1-2.
Z rysunku 8.22 wynika, że:
An = Ap – δ oraz δ = 180°– α ,
stąd dla kątów lewych azymuty kolejnych boków oblicza się według wzoru:
An = Ap + α – 180° (8.54)
Jest to formuła na obliczenie azymutu boku następnego An na podstawie azymutu boku po-przedniego Ap i kąta lewego α zawartego między tymi bokami. Kąt prawy β stanowi dopełnienie kąta lewego α do 360° (400g), a zatem: α = 360° – β. Po podsta-wieniu tej zależności do wzoru (8.31), otrzymamy za-pis do obliczania azymutów kolejnych boków na pod-stawie kątów prawych:
An = Ap – β + 180° (8.55)
3. Obliczenie przyrostów boków: B-1 i 1-2 na pod-stawie wzorów (8.6):
∆x = d ⋅ cos A ; ∆y = d ⋅ sin A
A
B dB-1 bok nawiązania
kąt nawiązania (lewy)
αB
kierunek obliczenia
Rys. 8.21. Ciąg poligonowy, wiszący
bok kierunkowy AB
1
2
α1
bok poligonowy d1-2
punkt nawiązania ciągu punkt poligonowy
kąt wierzchołkowy ciągu (lewy)
punkt kierunkowy
B
180°
1
δ=Ap-An
ββββ
αααα
Rys. 8.22. Wyznaczenie azymutu An
A
Ap
Ap
An

8.9. Obliczanie ciągów poligonowych, sytuacyjnych 220
4. Przeprowadzenie kontroli obliczenia przyrostów. Obliczone przyrosty ∆x, ∆y należy sprawdzić za pomocą jednego z wielu możliwych
do zastosowania sposobów. Jednym z nich jest ponowne obliczenie przyrostów w oparciu o wzory kontrolne:
∆x = S + C (8.56)
∆y= S – C przy czym:
S = ( )dA
245⋅ + °sin
oraz C = ( )dA
245⋅ + °cos (8.57)
Wyprowadzenie wzorów (8.56), (8.57): Ze wzorów na sinus i cosinus sumy kątów można napisać:
sin (A + 45°) = 22 ⋅ sin A + 2
2 ⋅ cos A oraz cos (A + 45°) = 22 ⋅ cos A – 2
2 ⋅ sin A
Po dodaniu i odjęciu powyższych równań stronami otrzymamy:
sin (A + 45°) + cos (A + 45°) = 2 ⋅ cos A oraz sin (A + 45°) – cos (A + 45°) = 2 ⋅ sin A ,
Po obustronnym pomnożeniu obydwu wcześniejszych równań przez 2
d uzyskamy wzory na przyrosty:
d
2⋅sin (A + 45°) +
d
2⋅cos (A + 45°) = d⋅cos A = ∆x
oraz
d
2⋅sin (A + 45°) –
d
2⋅cos (A + 45°) = d⋅sin A = ∆y,
Po wprowadzeniu do powyższych związków wielkości S, C wyrażonych wzorami (8.57), uzyskamy podane wcześniej wzory (8.56).
5. Obliczenie współrzędnych XN , YN punktów następnych na podstawie współrzęd-
nych XP , YP punktów poprzednich i przyrostów między tymi punktami wg wzorów:
XN = XP + ∆xP N ; YN = YP + ∆yP N
8.9.3. Obliczenie ciągów otwartych z nawiązaniem pełnym
Obliczenie ciągu wiszącego jest zadaniem jednoznacznie wyznaczalnym, ponieważ liczba spostrzeżeń n, czyli łączna ilość pomierzonych boków i kątów w tym ciągu jest równa ilości niewiadomych u, którymi są szukane pary współrzędnych X, Y poszczegól-nych punktów poligonowych. W przeciwieństwie do ciągu wiszącego, zadanie obliczenia ciągu obustronnie nawiązanego (z nawiązaniem pełnym) zawiera trzy spostrzeżenia nad-liczbowe. Ciąg przedstawiony na rys. 8.23 zawiera łącznie 9 obserwacji (spostrzeżeń) tzn. elementów pomierzonych (w tym 5 kątów i 4 długości), zaś trzy punkty poligonowe do-starczają sześciu niewiadomych (X, Y). Liczba spostrzeżeń nadliczbowych n – u jest więc równa 3. Dotyczy to każdego ciągu z pełnym nawiązaniem kątowym i liniowym, niezależ-nie od liczby boków. Trzy obserwacje nadliczbowe dostarczają trzech warunków, a te

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 221
z kolei trzech odchyłek pomiędzy wartościami pomierzonymi i teoretycznymi. Podczas przybliżonego wyrównania tego ciągu odchyłki te odnoszą się do sumy kątów oraz sum przyrostów współrzędnych: [∆x], [∆y].
Ciąg poligonowy otwarty, z pełnym nawiązaniem obustronnym posiada z każdej strony po dwa elementy nawiązania (kąt i bok), za pomocą których jest geometrycznie po-łączony z punktami osnowy wyższej klasy lub rzędu*. Ciąg pokazany na rys. 8.23 ma peł-ne nawiązanie do punktów: B, C za pośrednictwem elementów: αB , dB-1 i αC , d3-C .
W praktyce możliwe jest także obliczenie ciągu poligonowego z obustronnym nawią-zaniem niepełnym, w którym brak jednego (rys. 8.20 d) lub nawet dwóch kątów nawiązania (rys. 8.20 e). W tym ostatnim przypadku zespół obserwacji ciągu zawiera i tak jedno spo-strzeżenie nadliczbowe, pozwalające na ograniczoną kontrolę wyników pomiaru i obli-czeń.
Podany dalej sposób obliczenia ciągu otwartego, obustronnie nawiązanego stanowi wyrównanie p rzyb l iżone, dawniej dopuszczalne do stosowania tylko dla osnowy pomiarowej. Obecnie zarówno dla sieci osnów szczegółowych jak i pomiarowych wyma-gane jest znacznie bardziej pracochłonne wyrównanie ścisłe, którego zasady zostaną poda-ne na zajęciach z rachunku wyrównawczego. Zaletami metod ścisłych jest zapewnienie poprawnego wyrównania obserwacji, możliwość dokonania oceny dokładności wyników pomiaru i położenia punktów. Zdaniem autora wspomniany wymóg w odniesieniu do po-ziomej osnowy pomiarowej jest przesadny, tym bardziej iż nowa instrukcja techniczna G-4 (z r. 2002) dopuszcza stosowanie ciągów wiszących, niepodlegających żadnemu wyrów-naniu.
Rachunek obliczenia ciągu można rozpocząć od jego dowolnej strony, zwracając przy tym uwagę na rodzaj kątów związany z przyjętym kierunkiem obliczenia. Czynności zmierzające do wyznaczenia współrzędnych punktów poligonowych ciągu otwartego, obu-stronnie nawiązanego zawierają omówione wcześniej elementy postępowania w ramach obliczania ciągu wiszącego, lecz ze względu na trzy warunki wynikające z tej samej ilości obserwacji nadliczbowych, obejmują także wyznaczenie odchyłek: kątów wierzchołko-wych fkt i przyrostów fx , fy oraz ich rozrzucenie na wymienione elementy. Wartości odchy-łek umożliwiają weryfikację wyników pomiaru poprzez porównanie odchyłek otrzyma-nych z dopuszczalnymi (maksymalnymi), podanymi w odpowiednich instrukcjach tech-nicznych.
Dla obliczenia metodą przybliżoną współrzędnych punktów ciągu otwartego, obu-stronnie nawiązanego trzeba wykonać następujące czynności:
1. Na podstawie dzienników pomiarowych, szkicu osnowy i wykazów współrzędnych wpisać do formularza obliczeniowego (wzór: tabela 8.2) dane wyjściowe: oznacze-
* Zgodnie z aktualnie obowiązującymi standardami technicznymi osnowa pozioma szczegółowa i pomiarowa ma być jednorzędowa.
kierunek obliczenia 1
3
2 A
D
B
C
αB
α1
α2
α3
αC
Rys. 8.23. Ciąg poligonowy otwarty, z pełnym nawiązaniem obustronnym
dB-1 d1-2
d2-3 d3-C

8.9. Obliczanie ciągów poligonowych, sytuacyjnych 222
nia punktów, średnie wartości kątów wierzchołkowych, zredukowane długości bo-ków i współrzędne punktów nawiązania ciągu. W formularzu należy zaznaczyć jednostki, w których wyrażone są kąty (stopnie lub grady) i rodzaj kątów do obli-czenia (kąty prawe albo lewe). W kol. 13 „Uwagi” można też wykonać szkic ciągu.
2. Obliczyć (wraz z kontrolą) azymuty boków utworzonych przez punkty nawiązania: azymut początkowy – AP (AAB) i azymut końcowy – AK (ACD), a następnie wpisać je w odpowiednich pozycjach w kol. 3 formularza. Obliczenie azymutów kierunko-wych można zamieścić w kol. 13 „Uwagi, szkice”.
3. Obliczyć sumę praktyczną kątów poziomych: lewych [α ]p lub prawych [β ]p i wpisać ją w kol. 2 pod wartościami kątów.
4. Obliczyć sumę teoretyczną kątów [α ] t lub [β ] t na podstawie odpowiedniego wzoru: • dla kątów lewych:
[α ] t = AK – AP + n⋅180° (8.58) • dla kątów prawych:
[β ] t = AP – AK + n⋅180° (8.59)
gdzie: n – liczba pomierzonych kątów. Uzasadnienie tych wzorów podamy teraz w oparciu o oznaczenia z rys. 8.23.
Zgodnie ze wzorem (8.54) azymuty kolejnych boków ciągu obliczane z kątów le-wych wyniosą:
AB 1 = AAB+αB – 180° A1 2 = AB 1+α1 – 180° A2 3 = A1 2+α2 – 180° A3 C = A2 3+α3 – 180° ACD = A3 C+αC – 180°
Suma: ACD = AAB+ [α ] – n⋅180°
Po podsumowaniu powyższych równań stronami i uporządkowaniu zapisu na-stąpi redukcja prawie wszystkich azymutów za wyjątkiem azymutów nawiązują-cych. Po wprowadzeniu oznaczeń: AAB ≡ AP oraz ACD ≡ AK, otrzymamy wzór:
AK = AP + [α ] t – n⋅180°,
z którego po prostym przekształceniu wynika wzór (8.58). Dla kątów prawych zapiszemy zależność:
[α ] = [ 360°– β ] = n⋅360°– [β ],
a następnie związek: AK = AP + n⋅360°– [β ] – n⋅180°,
który po przekształceniu daje wzór (8.59) na sumę teoretyczną kątów prawych. 5. Obliczenie odchyłki kątowej fkt otrzymanej jako różnica sumy praktycznej i sumy
teoretycznej kątów ciągu.
fkt = [α ]p – [α ]t (8.60)
fkt = [β ]p – [β ]t (8.60 a)
6. Obliczenie odchyłki kątowej dopuszczalnej (maksymalnej) fkt max. zgodnie z wyma-ganiami instrukcji G-4 i porównanie z nią odchyłki otrzymanej fkt. Odchyłka ta

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 223
umożliwia ocenę dokładności i przydatności obserwacji kątowych ciągu. Odchyłka otrzymana nie może przekraczać odchyłki dopuszczalnej, czyli:
fkt � fkt max. (8.61)
Przekroczenie maksymalnej odchyłki świadczy o nadmiernych błędach po-miaru kątów, który w tym wypadku należy powtórzyć. Przy zakładaniu osnowy pomiarowej na większym obszarze dla ok. 30% ciągów sytuacyjnych można zwięk-szyć tolerancję i uwzględnić odchyłki nieprzekraczające wartości 2fkt max.. Według instrukcji G-4 (z r. 1983) dopuszczalna odchyłka kątowa fkt max dla ciągów sytuacyj-nych ma być obliczana na podstawie wzoru:
fkt max = ± m0⋅ n (8.62) gdzie: m0
– średni błąd pomiaru kąta, który przyjmuje się jako: • m0= ±60″ (180cc) dla ciągów o długości do 1,2 km, • m0 = ±30″ (90cc) dla ciągów o długości ponad 1,2 km.
Długość ciągu L jest sumą długości wszystkich pomierzonych boków tego ciągu (łącznie z bokami nawiązania). Wartość dopuszczalnej odchyłki kątowej można również określić z tabeli znajdującej się w załącznikach na końcu instrukcji G-4.
7. Równomierne rozrzucenie otrzymanej odchyłki kątowej na poszczególne kąty. Każdy pomierzony kąt poziomy uzyska jednakową poprawkę vkt wyrażoną w se-kundach lub decymiligradach, wynoszącą:
vf
nktkt= − (8.63)
Jeśli iloraz (−fkt):n powoduje powstanie reszty, tzn. obliczone poprawki zawie-rają część całkowitą i ułamek dziesiętny, to poprawki zaokrąglamy raz w górę, a drugi raz w dół do pełnych sekund (lub cc), doprowadzając sumę poprawek do-kładnie do wartości – fkt (patrz przykład w tab. 8.2). Poprawki wpisujemy kolorem czerwonym nad wartościami kątów w kol. 2.
8. Obliczenie według wzoru (8.54) lub (8.55) azymutów boków poligonowych na podstawie wartości azymutu początkowego AP i poprawionych kątów. Kontrolą ob-liczenia azymutów jest uzyskanie na końcu rachunku niezmienionego azymutu końcowego AK.
9. Obliczenie przyrostów współrzędnych ∆x, ∆y poszczególnych boków na podstawie wzorów (8.6)
10. Kontrola obliczenia przyrostów w oparciu o wzory (8.56) i (8.57). 11. Obliczenie sum przyrostów: praktycznych: [∆x]p
, [∆y]p i teoretycznych: [∆x] t , [∆y] t.
Sumy teoretyczne przyrostów są równe różnicy współrzędnych punktów nawiąza-nia (punkty B, C na rys. 8.23) końcowego K i początkowego P.
[∆x] t = XK – XP (8.64) [∆y] t = YK – YP
12. Obliczenie odchyłek przyrostów: fx , fy oraz odchyłki liniowej fL . Wartości tych od-chyłek stanowią w metodzie przybliżonej podstawę do oceny dokładności ciągów. Odchyłki przyrostów są różnicami pomiędzy sumami praktycznymi i teoretycznymi odpowiednich przyrostów współrzędnych:
fx = [∆x]p – [∆x] t (8.65) fy = [∆y]p – [∆y] t

8.9. Obliczanie ciągów poligonowych, sytuacyjnych 224
Odchyłka liniowa fL otrzymana w danym ciągu jest równa pierwiastkowi z sumy kwadratów odchyłek przyrostów:
fL = f fx y2 2+ (8.66)
13. Obliczenie odchyłki liniowej dopuszczalnej fL max. i porównanie z nią odchyłki fL otrzymanej. Nie może ona przekroczyć odchyłki dopuszczalnej, czyli:
fL � fL max (8.67)
Gdy azymuty boków były wyznaczane z kątów poprawionych, to zgodnie z instr. G-4 (z r. 1983) odchyłkę dopuszczalną fL max należy obliczyć na podstawie wzoru:
fL max = ( )( ) 22
2
02
12
2 1cL
n
nnmLu
b
bb +⋅++
⋅
+⋅
ρ (8.68)
gdzie: L – długość ciągu wyrażona w metrach, u – współczynnik błędów przypadkowych pomiarów liniowych (wg G-4 u = 0,0059), nb – ilość boków ciągu, c – wpływ błędów położenia punktów nawiązania (wg instr. G-4 c = 0,10 m). ρ – zamiennik miary łukowej (ρ″=206 265″, ρcc=636 620cc)
Dla ok. 30% ciągów można dopuścić odchyłki dochodzące do wartości 2 fL max .
Wartości odchyłek kątowych i liniowych maksymalnych są zestawione w tabeli znaj-dującej się w załącznikach do instrukcji G-4 oraz w Przewodniku do ćwiczeń…”.
14. Rozrzucenie odchyłek przyrostów proporcjonalnie do długości boków. Poprawki przyrostów wyrażają się wzorami:
a) (8.69 oraz (8.69) iyy
iixx
i dL
fvd
L
fv ⋅−=⋅−=
gdzie: L – długość ciągu w metrach (czyli suma długości pomierzonych boków), di – długość i – tego boku, dla którego obliczana jest poprawka przyrostu.
Poprawki należy zaokrąglić do pełnych centymetrów, zaś ich suma musi być dokładnie równa odchyłce przyrostów ze znakiem przeciwnym. Poprawki wyrażone centymetrach wpisuje się kolorem czerwonym nad końcówkami poszczególnych przyrostów.
Wartości poprawek przyrostów można też obliczać bardziej racjonalnym spo-sobem, proporcjonalnie do bezwzględnej wartości przyrostów według wzorów:
a) (8.70 | |||
oraz (8.70) |||| i
yyii
xxi y
y
fvx
x
fv ∆⋅
∆Σ−=∆⋅
∆Σ−=
15. Obliczenie współrzędnych punktów poligonowych: XN , YN na podstawie współ-rzędnych punktów poprzednich: XP
, YP i przyrostów poprawionych: ∆xPN , ∆yPN :
XN = XP + ∆xPN
YN = YP + ∆yPN
Obliczenie powyższe ma charakter wieloetapowy i dotyczy kolejno wszyst-kich punktów wyznaczanych. Po dodaniu do współrzędnych X, Y ostatniego punktu poligonowego pary przyrostów ∆x , ∆y dla końcowego boku nawiązania kontrolę

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 225
obliczenia zbioru współrzędnych tych punktów stanowi uzyskanie niezmienionych współrzędnych punktu nawiązania C.
Przykład: Obliczyć współrzędne punktów: 1, 2, 3 w ciągu sytuacyjnym otwartym, nawiązanym
obustronnie do punktów: B, C (rys. 8.23).
Tabela 8.2. Obliczenie ciągu sytuacyjnego otwartego, nawiązanego obustronnie
Przyrosty Kontrola przyrostów Współrzędne
Ozn
. pu
nktu Kąty
α – lewe β – prawe
g c cc
Azymuty A
g c cc
Boki d ∆x ∆y 2
d
A+50g S C
∆x=S+C ∆y=S -C X Y O
zn.
punk
tu
Uwagi, obliczenia
1 2 3 4 5 6 7 8 9 10 11 12 13
A 2000,00 3000,00 A
97 87 87
B 245 57 +25
20 2010,00 3300,00 B
143 45 32 150,00 +2
-94,62 +2
116,39 106,066
193,4532 +10,89 -105,51
-94,62 +116,40
1 154 33 +24
20 1915,40 3416,41 1
97 78 76 200,00 +3
+6,95 +3
+199,88 141,421
147,7876 +103,41 -96,46
+6,95 +199,87
2 254 80 +25
50 1922,38 3616,32 2
152 59 51 175,50 +2
-129,05 +3
+118,94 124,097
202,5951 -5,06
-123,99 -129,05 +118,93
3 170 20 +24
00 1793,35 3735,29 3
122 79 75 210,80 +3
-73,88 +3
197,43 149,058
172,7975 +61,77 -135,66
-73,89 +197,43
C 230 80 +25
90 1719,50 3932,75 C
153 60 90
D 1421,10 4199,10 D
L
=736,30 ∑p=-290,60
∑t=-290,50
∑p=+632,64
∑t=+632,75
[α]p
[α]t
1055 1055
71 73
80 03
fx= – 0,10 fL= ± 0,15
fy= – 0,11
fL max=±0,21
Obliczenie azymutu AAB ze współrzędnych: tg A = (+300,00):(+10,00)
I ćw. ϕ =97-87-87
AAB=97,8787g
Kontrola:
tg (A+50g) =
+−
310 00
290 00
,
,
ψ =52,1213g
A+50g= 147,8787g �
tgACD=(+266,35):(-298,40)
II ćw. ϕ =46,3910g
ACD=153,6090g
Kontrola:
tg (A+50g) =
−−
32 05
564 75
,
,
ψ =3,6090g
A+50g = 203,6090g
�
fkt
fkt max
– 1
±4
23 02
Ciągi poligonowe, otwarte powinny być zbliżone do prostoliniowych i równobocz-nych. Największym błędem jest obarczony punkt środkowy ciągu, ponieważ jest najbar-dziej oddalony od punktów nawiązania.
8.9.4. Obliczenie ciągów otwartych z nawiązaniem niepełnym
Przybliżone wyrównanie ciągu poligonowego, otwartego, z nawiązaniem niepełnym (rys. 8.20 d) przebiega podobnie do opisanego wcześniej przypadku obliczenia ciągu z na-wiązaniem pełnym, jednak z uwagi na brak na końcu ciągu drugiego znanego punktu, a więc także kąta nawiązania, nie można określić azymutu końcowego AK. Nie da się więc także obliczyć sumy teoretycznej kątów, a tym samym dokonać ich wyrównania. Azymuty poszczególnych boków ciągu, a następnie przyrosty obliczamy więc w oparciu o azymut początkowy AP uzyskany ze współrzędnych oraz niewyrównane kąty wierzchołkowe. Dal-szy tok postępowania jest identyczny z przebiegiem obliczeń opisanym w ust. 8.9.3. We-dług instrukcji G-4 (wyd. III z r. 1983) dopuszczalna odchyłka liniowa dla przypadku, gdy przyrosty współrzędnych obliczone zostały na podstawie azymutów uzyskanych z kątów bezpośrednio pomierzonych powinna być obliczona w oparciu o wzór:
fL max = ( )( ) 22
2
02
6
2 1cL
n
nnmLu
b
bb +⋅++
⋅
+⋅
ρ (8.71)

8.9. Obliczanie ciągów poligonowych, sytuacyjnych 226
8.9.5. Obliczenie ciągu poligonowego zamkniętego
Ciąg poligonowy zamknięty (rys. 8.24) jest zamkniętym wielo-bokiem, w którym pomierzono wszystkie kąty wierzchołkowe i długości boków. Przeważnie sta-nowi on osnowę niezależną, czyli nienawiązaną do osnowy wyższej klasy lub rzędu, zakładaną dla pomiaru sytuacyjnego małego ob-szaru np. działki, kompleksu bu-dynków itp. Jest też osnową wy-korzystywaną bardzo często do celów dydaktycznych. Danymi wyjściowymi do obliczenia ciągu
zamkniętego, oprócz pomierzonych w terenie kątów i długości, są współrzędne jednego wierzchołka i azymut boku wychodzącego z tego wierzchołka. W ciągu zamkniętym poka-zanym na rys. 8.24 a dane są współrzędne punktu 1 i azymut boku 1-2.
Przebieg obliczeń ciągu zamkniętego jest podobny do obliczenia ciągu otwartego, nawiązanego obustronnie. Różnice występują tylko na etapach określania sum teoretycz-nych kątów i przyrostów. W ciągu zamkniętym oprócz dotyczącego wszystkich rodzajów ciągów poligonowych podziału kątów na lewe i prawe można także wyróżnić kąty we-wnętrzne i zewnętrzne. Sumy teoretyczne kątów wewnętrznych i zewnętrznych wieloboku zamkniętego wynoszą odpowiednio:
Suma kątów wewnętrznych = (n – 2) ⋅180° (8.72)
Suma kątów zewnętrznych = (n + 2) ⋅180° (8.73)
Wzór (8.71) można bez trudu uzasadnić w oparciu o rysunek 8.24 b, na którym wie-lobok został podzielony na n trójkątów. Łączna suma ich kątów wynosi:
[β]+[γ] = n⋅180°,
a ponieważ: [γ] = 360° = 2⋅180°, stąd:
[β] = n⋅180° − 2⋅180° = (n − 2)180°
Po uwzględnieniu we wzorze (8.71), że każdy kąt wewnętrzny β jest dopełnieniem odpowiadającego mu kąta zewnętrznego γ do 360°, można także uzasadnić wzór (8.73). Jeśli kierunek obliczenia jest zgodny z ruchem wskazówek zegara, wtedy kąty wewnętrzne ciągu zamkniętego są jednocześnie kątami prawymi (rys. 8.24). Po zmianie tego kierunku na przeciwny kąty wewnętrzne staną się kątami lewymi.
W celu obliczenia ciągu zamkniętego wykonujemy podobne czynności jak dla ciągu nawiązanego obustronnie tj.:
• Obliczamy odchyłkę kątową fkt i po stwierdzeniu, że nie przekracza ona odchyłki dopuszczalnej fkt max
, rozrzucamy ją równomiernie na poszczególne kąty wierzchoł-kowe.
• Na podstawie kątów poprawionych wyznaczamy azymuty kolejnych boków poli-gonowych, korzystając z wzoru (8.54) lub (8.55). Po uwzględnieniu w ostatniego
Rys. 8.24. Ciąg poligonowy zamknięty
β1
β2
β4 β3
β5
1
5
4 3
2
d3-4
N A1-2
d5-1 d1-2
d 2-3
d4-5
β1
β2
β3
β5
1
5
4 3
2
β4
S
γ1
γ2 γ3
γ4
γ5
a) b)

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 227
kąta kontrolę tego rachunku stanowi uzyskanie na końcu obliczenia azymutu iden-tycznego z danym azymutem wyjściowym.
• Obliczamy przyrosty boków, rozpoczynając i kończąc rachunek w tym samym punkcie początkowym. Wynika stąd, że sumy teoretyczne obydwu rodzajów przy-rostów są w ciągu zamkniętym równe zero, a więc sumy praktyczne przyrostów równają się odchyłkom przyrostów:
[∆x ]t = 0 ; [∆y ] t = 0 (8.74) oraz [∆x ]p = fx ; [∆y ]p = fy (8.74 a)
• Z odchyłek fx i fy obliczamy odchyłkę liniową fL , zaś ze wzoru (8.68) lub tabeli w instr. G-4 odchyłkę dopuszczalną fL max.. Gdy spełniony jest warunek fL � fL max , wtedy poprawiamy przyrosty odpowiednio rozrzucając na nie poprawki obliczone z odchyłek fx i fy.
• Obliczamy współrzędne kolejnych punktów poligonowych, dochodząc na końcu do punktu wyjściowego o danych współrzędnych, które na tym etapie rachunku po-winniśmy uzyskać w postaci niezmienionej.
Ciąg zamknięty może stanowić osnowę niezależną lub uzyskać nawiązanie jednopunktowe z orientacją. W drugim przypadku do wieloboku zamkniętego włączamy punkt nawią-zania oraz mierzymy kąt nawiązania zawarty pomiędzy bo-kiem ciągu B1 a bokiem kierunkowym BA (rys. 8.25). Obli-czenie takiego ciągu można przeprowadzić na zasadzie obli-czenia ciągu obustronnie nawiązanego do tego samego punktu nawiązania i boku kierunkowego.
8.10. Obliczanie wci ęć pojedynczych
Wcięcia pojedyncze są prostymi, jednoznacznie wyznaczalnymi zadaniami geodezyj-nymi, których celem jest określenie współrzędnych prostokątnych jednego punktu (rza-dziej dwóch punktów np. w zadaniach Hansena i Mareka). Wcięcia te zawierają tyle ob-serwacji n, na ile jest to konieczne do jednoznacznego wyznaczenia u niewiadomych (n = u), którymi są współrzędne X, Y punktu wcinanego. Wynika stąd, że w konstrukcjach wcięć pojedynczych nie występują spostrzeżenia nadliczbowe, a tym samym problem wy-równania. Liczba obserwacji przekraczająca liczbę niewiadomych występuje natomiast w konstrukcjach wcięć wielokrotnych.
Główne zadania wcięć to zagęszczanie poziomej osnowy geodezyjnej, wyznaczenie położenia punktów dostępnych i niedostępnych w pracach inwentaryzacyjnych, a także podczas pomiarów odkształceń i przemieszczeń.
8.10.1. Kątowe wcięcie w przód
Kątowe wcięcie w przód polega na określeniu współrzędnych punktu wcinanego P na podstawie kątów poziomych: α, β zmierzonych w trójkącie ABP (rys. 8.26) ze stanowisk A, B o znanych współrzędnych. Odcinek AB stanowi bazą wcięcia, zaś celowe łączące punkty znane z punktem szukanym, noszą nazwę celowych zewnętrznych lub celowych w przód, od czego pochodzi nazwa tego wcięcia. Rozwiązanie zadania ma charakter jed-noznaczny, ponieważ w trójkącie ABP znane są tylko trzy elementy geometryczne: dłu-gość bazy dAB określona współrzędnymi punktów A, B oraz dwie obserwacje kątowe: α, β.
Rys. 8.25. Nawiązanie jed-
nopunktowe z orientacją
A
B
1
2
3

8.10. Obliczanie wcięć pojedynczych 228
Kolejność czynności rachunkowych prowadzących do określenia wartości współrzędnych X, Y punktu wcinanego P jest następująca:
1. Obliczenie azymutu i długości boku AB ze współ-rzędnych.
2. Wyznaczenie azymutów boków wcinających AP, BP. Zgodnie z rys. 8.26 azymuty te wynoszą: AAP = AAB + α oraz ABP = ABA – β .
3. Obliczenie długości boków AP, BP na podstawie twierdzenia sinusów:
sin)( sin
= ; sin)( sin
αβα
ββα
⋅+
⋅+
= ABBP
ABAP
dd
dd
4. Obliczenie przyrostów boków wcinających:
∆xAP = dAP ⋅ cos AAP , ∆yAP = dAP ⋅ sin AAP ∆xBP = dBP ⋅ cos ABP , ∆yBP = dBP ⋅ sin ABP .
5. Dwukrotnie określenie współrzędnych punktu P na podstawie: a) współrzędnych punktu A i przyrostów boku AP:
XP = XA + ∆xAP ; YP = YA + ∆yAP ,
b) współrzędnych punktu B i przyrostów boku BP: XP = XB + ∆xBP ; YP = YA + ∆yBP
.
Zgodność obydwu par wyników stanowi kontrolę rachunkową.
6. Kontrola obliczenia współrzędnych punktu P, polegająca na stwierdzeniu zgodności wyników dwukrotnego określenia trzeciego wartości kąta γ trójkąta ABP.
a) jako dopełnienie pomierzonych kątów α, β do 180° γ pom. = 180°– (α+β ) b) γ obl. ze współrzędnych punktów: A, B, P w oparciu o wzór (8.19).
Ten logiczny tok obliczeń, oparty na rozwiązaniu trójkąta ABP, jest jednak wieloeta-powy i dość pracochłonny. Zadanie obliczenia wcięcia w przód możemy rozwiązać spraw-niej, stosując sposób oparty na pomocniczych symbolach rachunkowych Hausbrandta (8.58):
( , )( )
X YX Y X Y
P PA A B B=
− +1 11,2
ctg ctg β α (8.75)
Zaletą obliczeń za pomocą powyższego wzoru jest otrzymywanie ostatecznych wyni-ków po podstawieniu do formy rachunkowej danych wyjściowych i wykonaniu jednego ciągu obliczeń, bez potrzeby notowania rezultatów etapów pośrednich. Po przekształceniu symboli rachunkowych Hausbrandta na postać algebraiczną otrzymamy związki:
XX Y X Y
PA A B B=
⋅ + + ⋅ −+
ctg ctg
ctg ctg
β αα β
(8.76)
YX Y X Y
PA A B B=
− + ⋅ + + ⋅+
ctg ctg
ctg ctg
β αα β
Rys. 8.26. Kątowe wcięcie
w przód
A B
P
β α
γ
dAB
ABA
A AP
AAB
ABP

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 229
Zestawiając formę rachunkową występującą we wzorze (8.75), należy przypisać punktom znanym i pomierzonym kątom α, β prawidłową konfigurację przedstawioną na rys. 8.26, zgodnie z którą punkt A i kąt α muszą znajdować się po prawej stronie bazy wcięcia. Przestawienie oznaczeń punktów bazy i kątów powoduje w rezultacie błędny wy-nik obliczeń.
Kontrolę wyników wcięcia przeprowadzamy tak samo, jak w ramach poprzedniego sposobu tj. poprzez dwukrotne obliczenie kąta γ :
a) z dopełnienia kątów α, β γ pom. = 180°– (α+β ), b) ze współrzędnych punktów A, B, P po dostosowaniu wzoru (8.21) do oznaczeń
z rys. 8.26:
0. ∆∆
∆∆ tg
PBPB
PAPAobl yx
yx=γ
Trójkąt ABP powinien być tak zbudowany, aby kąt γ zawierał się w przedziale od 30° do 150°. Wynik wcięcia w przód jest najdokładniejszy, gdy boki wcinające AP, BP przeci-nają się pod kątem prostym, a więc gdy: γ =90°.
Główną zaletą kątowego wcięcia w przód jest możliwość określania współrzędnych celów niedostępnych. Ponieważ omawiane zadanie jest jednoznacznie wyznaczalne, a więc nie zapewnia ono kontroli obserwacji, dlatego zaleca się pomiar elementu kontrolnego np. dodatkowego kąta, boku, wysokości trójkąta itp. Jeśli z tej samej bazy wcina się jednocze-śnie kilka punktów dostępnych, wtedy elementami sprawdzającymi mogą być odległości między punktami wcinanymi zmierzone w terenie i obliczone ponownie ze współrzędnych.
8.10.2. Wcięcie liniowe
Pojedyncze wcięcie liniowe jest konstrukcją jednoznacznie wyznaczalną, polegającą na określeniu współrzędnych prostokątnych punktu wcinanego P na podstawie dwu odle-głości zmierzonych pomiędzy punktem P a parą punktów znanych A, B.
Konstrukcję wcięcia liniowego tworzy trójkąt ABP (rys. 8.27), którego podstawą jest baza wcięcia utworzona przez dwa punkty A, B o znanych współrzędnych, zaś wierzchoł-kiem − punkt wyznaczany P. Ramionami trójkąta są boki wcinające o pomierzonych długościach: dBP = a, oraz dAP = b. Wcięcie liniowe jest wykorzystywane do zagęszczania osno-wy pomiarowej, wyznaczania położenia punktów na opisach topograficznych i zdejmowania szczegółów sytuacyjnych za pomocą samych domiarów liniowych, bez potrzeby użycia węgielnicy lub teodolitu.
Zadanie obliczenia wcięcia liniowego można zrealizo-wać na wiele sposobów. Jednym z nich jest jego przekształ-cenie na kątowe wcięcie w przód i wykorzystanie postępowania opisanego w ust. 8.10.1.
Po uzyskaniu ze współrzędnych długości odcinka AB (c=AB), obliczamy wartości ką-tów α, β (oraz kąta γ − dla kontroli) na podstawie twierdzenia Carnota (cosinusów) w opar-ciu o znane długości boków trójkąta ABP:
B A
P
β α
Rys. 8.27. Wcięcie liniowe
h
P′ q
γ
p c= p + q
a
b

8.10. Obliczanie wcięć pojedynczych 230
cos
cos
cos
α
β
γ
= − + + =
= + − + =
= + + − =
a b c
bc
C
bc
a b c
ac
C
ac
a b c
ab
C
ab
a
b
c
2 2 2
2 2 2
2 2 2
2 2
2 2
2 2
(8.77)
Kontrola: α + β + γ = 180°
Wyrażenia Ca , Cb , Cc noszą nazwę karnotianów, zaś ich suma równa się sumie kwa-dratów boków trójkąta, co jest wykorzystywane do kontroli ich obliczenia:
Ca+Cb+Cc= a2+b2+c2 (8.78)
Nieco łatwiej można wyznaczyć wartości kątów trójkąta: α, β, γ , stosując twierdzenie Carnota tylko dla określenia jednego z nich, zaś dla pozostałych – twierdzenie sinusowe.
Wygodnym i szybkim sposobem rozwiązania wcięcia liniowego w przód jest zasto-sowanie pomocniczych symboli rachunkowych Hausbrandta i obliczenie współrzędnych punktu P w oparciu o wzór:
( , )( )
X YX Y
P C
X Y
P CP PA A
b
B B
a
=− +4 4
1,2
(8.79)
Po doprowadzeniu wzoru (8.79) do postaci algebraicznej otrzymamy:
XX C Y P X C Y P
C CPA b A B a B
a b
=⋅ + ⋅ + ⋅ − ⋅
+4 4
(8.80)
YX P Y C X P Y C
C CPA A b B B a
a b
= − ⋅ + ⋅ + ⋅ + ⋅+
4 4
Wyraz 4P oznacza poczwórne pole trójkąta ABP, które można obliczyć na podstawie karnotianów ze wzoru:
4P C C C C C Ca b a c b c= ⋅ + ⋅ + ⋅ (8.81)
Dokładność określenia współrzędnych punktu za pomocą wcięcia liniowego zależy od dokładności pomiaru boków i kształtu trójkąta ABP. Najkorzystniejsze wcięcie ma miejsce wtedy, gdy boki AP, BP przecinają się pod kątem prostym.
Inny sposób rozwiązania wcięcia liniowego polega na jego przekształceniu w zadanie obliczenia współrzędnych punktu na domiarze prostokątnym. W tym celu należy określić odciętą punktu P czyli jeden z odcinków p lub q, na które spodek wysokości trójkąta dzieli bazę wcięcia c (rys. 8.27) oraz samą wysokość h jako rzędną punktu wcinanego.
Na podstawie twierdzenia Pitagorasa w trójkątach APP′, BPP′ możemy napisać:
h2= a2 – p2 = b2 – q2
a stąd: a2 – b2 = p2 – q2 = (p – q)⋅(p + q) .
Ponieważ: p + q = c ,

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 231
a więc: p – q = a b
c
2 2−
Po dodaniu i odjęciu stronami dwóch ostatnich równań na sumę i różnicę odcinków p, q, otrzymamy wzory (8.82), (8.83) na obliczenie długości p, q:
22
222
c
C
c
cbap b=+−= (8.82)
c
C
c
cbaq a
22
222
=++−= (8.83)
Rzędną (domiarem) punktu P jest wysokość trójkąta h, którą obliczymy jako:
2222 qbpah −=−= (8.84)
8.11. Obliczenie domiarów prostok ątnych ze współrz ędnych
Przed wyznaczeniem w terenie położenia projektowanych obiektów budowlanych na-leży je opracować geodezyjnie, określając ich jednoznaczną lokalizację za pomocą współ-rzędnych. Następnie z tych współrzędnych oblicza się miary konieczne do wyniesienia projektu w teren i wpisuje je na szkicach dokumentacyjnych, potrzebnych do tyczenia obiektów podczas pomiarów realizacyjnych. Jeśli obiekty mają być wytyczone w terenie metodą ortogonalną, to na podstawie współrzędnych punktów sytuacyjnych obiektów obli-cza się domiary prostokątne.
Omawiane zadanie jest więc odwrotnością omówionego wcześniej zadania, polegają-cego na obliczeniu współrzędnych punktów na podstawie domiarów prostokątnych. Do wytyczenia metodą rzędnych i odciętych punktu P o znanych współrzędnych X, Y, należy określić domiary prostokątne l, h względem boku osnowy realizacyjnej, wyznaczonego przez dwa zadane punkty osnowy poziomej A, B. Przyrosty współrzędnych odcinka AP obliczamy ze wzorów (8.27):
∆xAP = l ⋅ cos A – h ⋅ sin A
∆yAP = l ⋅ sin A + h ⋅ cos A
Po obustronnym pomnożeniu powyższych równań najpierw przez cos A, a następnie przez (– sin A), otrzymamy dwie pary równań, które następnie dodamy stronami:
∆xAP ⋅ cos A= l ⋅ cos2 A – h ⋅ sin A cos A –∆xAP ⋅ sin A = – l sin A cos A + h sin2 A ∆yAP ⋅ sin A= l ⋅ sin2 A + h ⋅ sin A cos A +∆yAP ⋅ cos A = +l sin A cos A + h cos2A
∆xAP ⋅ cos A + ∆yAP ⋅ sin A = l –∆xAP sin A + ∆yAP cos A = h
Po uporządkowaniu równań sumowych wzory na domiary prostokątne obliczone ze współrzędnych punktów: A, B, P przyjmą postać:
l = ∆yAP ⋅ sin A + ∆xAP ⋅ cos A (8.85)
h = ∆yAP ⋅ cos A – ∆xAP ⋅ sin A
Wzory (8.82) można również zapisać za pomocą symboli S. Hausbrandta:

8.12. Wybrane programy do przeprowadzania obliczeń geodezyjnych 232
( , )sin cos
h ly x
A AAP AP=
∆ ∆
1,2
(8.86)
Oznaczenia przyrostów występujących we wzorach (8.85), (8.86) wskazują na ich ob-liczanie względem punktu wyjściowego A. Przyrosty ∆xAP, ∆yAP można zastąpić przyrosta-mi: ∆xP-N , ∆yP-N pomiędzy sąsiednimi punktami rzutowanymi na daną prostą AB, przy czym symbole P, N oznaczają: P – punkt poprzedni, N – punkt następny. W ten sposób za-miast domiarów l, h otrzymamy w wyniku obliczeń ich przyrosty: ∆hPN , ∆lPN wyrażone wzorem:
2,1cossin
∆∆)∆,∆(
AA
xylh PNPN
PNPN = (8.87)
Zaletą takiego sposobu rachunku są pośrednie kontrole obliczanych przyrostów oparte na zależnościach występujących również w zadaniu odwrotnym (zob. ust. 8.7.3):
• [∆l] = dAB , czyli suma przyrostów obliczonych miar bieżących ma być równa długo-
ści odcinka prostej AB, na którą rzutujemy punkty domierzane; • [∆h] = 0 , tzn. suma przyrostów rzędnych jest równa zero (rzędna w prawo ma znak
„+” , zaś rzędna w lewo znak „–”); • [∆x] = XB – XA oraz [∆y] = YB – YA , suma przyrostów współrzędnych odcinków
utworzonych przez wytyczane ortogonalnie sąsiednie punkty sytuacyjne ma być równa różnicom współrzędnych (przyrostom) obliczonym dla punktów końcowych A, B linii pomiarowej.
8.12. Wybrane programy do przeprowadzania oblicze ń geodezyjnych
8.12.1. Program WinKalk
Wśród licznych programów komputerowych wykorzystywanych w Polsce do obli-czeń geodezyjnych dużą popularnością odznaczają się programy: WinKalk, C-Geo, Geo-net. Realizują one wiele typowych obliczeń geodezyjnych, w tym wszystkie zadania z rachunku współrzędnych, które zostały opisane w niniejszym podręczniku.
Dystrybutorem i posiadaczem praw autorskich programu WinKalk jest firma infor-matyczna Coder. Po dokonaniu zakupu programu firma ta dostarcza dyskietki instalacyjne, za pomocą których instaluje się program w systemie Windows. Program funkcjonuje tylko po uzyskaniu z firmy unikalnego kodu potwierdzającego posiadanie przez użytkownika licencji wydanej na odpowiednią ilość stanowisk komputerowych. Do zalet omawianego programu można zaliczyć: łatwą i prostą obsługę, pracę w systemie operacyjnym Win-dows, możliwości prezentacji graficznej na ekranie monitora i drukarce w postaci kartome-trycznych szkiców sporządzanych w skali określonej przez operatora.
Program składa się z wersji bazowej dla obliczeń typowych i modułów do zadań spe-cjalnych takich jak: tyczenie tras, współpraca z rejestratorami polowymi, wyrównanie sieci płaskich i niwelacyjnych, obliczanie objętości mas ziemnych. Zasada działania programu WinKalk opiera się na użyciu wielu formularzy (okienek), z których każdy realizuje inną

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 233
funkcje obliczeniową (np. domiary, tachimetria itd.), a z kolei każda funkcja umożliwia sporządzenie raportu z obliczeń i szkicu obliczanej konstrukcji geodezyjnej.
Oprócz wersji bazowej użytkownik może dodatkowo (za dopłatą) zamówić kilka mo-dułów specjalnych:
• moduł „Trasy” − wspomagający tyczenie łuków i krzywych przejściowych. • moduł „Rejestrator” – zawierający pakiet funkcji do współpracy z rejestratorami
polowymi. • moduł „Wyrównanie” – pozwalający na przeprowadzenie ścisłego wyrównania
niewielkich sieci płaskich i niwelacyjnych.
a) b)
Rys. 8.28. Zadania geodezyjne programu WinKalk zawarte w menu: „Pomiary” i „Obliczenia”
Wersja bazowa programu WinKalk obejmuje realizację typowych geodezyjnych za-dań zawartych w menu „Pomiary”(rys. 8.28 a) i „Obliczenia” (rys. 8.28 b) poprzez wyko-nanie następujących obliczeń:
• współrzędnych punktów na prostej i domiarach prostokątnych, • współrzędnych prostokątnych punktów na domiarach biegunowych, • przecięcia prostych, • przecięcia z ramką sekcyjną, • ciągów sytuacyjnych i busolowych, • wcięć pojedynczych (kątowego, liniowego, przestrzennego, wstecz, kombinowane-
go, w bok i stanowiska swobodnego), • dzienników niwelacji technicznej, precyzyjnej i trygonometrycznej, • objętości mas ziemnych, • danych do wyniesienia punktów o znanych współrzędnych metodą ortogonalną, • danych do analogicznego wyniesienia metodą biegunową, • azymutów i długości ze współrzędnych, • kątów ze współrzędnych, • pól ze współrzędnych, • transformacji współrzędnych. • projektowania działek na zadaną powierzchnię i wymiary, • tworzenia bazy działek danego obiektu pomiarowego.

8.12. Wybrane programy do przeprowadzania obliczeń geodezyjnych 234
a) b)
Rys. 8.29. Okno „Wybór obiektu” w programie WinKalk
Po instalacji, której przebieg opisany jest szczegółowo w instrukcji obsługi, można rozpocząć użytkowanie programu, uruchamiając go kliknięciem myszką w ikonę programu na pulpicie lub w folderze „Geodezja” założonym podczas in-stalacji. Wszystkie dane, wyniki pomiarów i obliczeń oraz szkice są grupowane w obrębie pliku z nazwą obiektu pomiarowego wybraną przez użytkownika.
Gdy program jest uruchamiany po raz pierwszy, lista obiektów jest pusta (rys. 8.29 a), a więc pierwszą czynnością jest utworzenie nowego obiektu. Po naci-
śnięciu przycisku pojawia się pole dialogowe (rys. 8.30), w którym wpisujemy nazwę obiektu np. „Kraków” i naciskamy na klawiaturze komputera kla-wisz [Enter]. Obiekt zostaje utworzony i następuje wy-świetlenie głównego okna programu z wybraną nazwą obiektu na pasku tytułowym oraz pozycjami menu (rys. 8.31).
Rys. 8.31. Główne menu programu WinKalk
Z reguły obliczenia wykonywane za pomocą programu rozpo-czynamy od wpisania do bazy numerów i współrzędnych punktów znanych np. należących do osnowy wykorzystywanej do nawiązania pomiarów. Chcąc wprowadzić nowe punkty do bazy danych obiektu wybieramy z menu „Punkty” opcję „Wpis” (rys. 8.32). Następuje wówczas wyświetlenie tabeli „Nowy punkt” (rys. 8.33), w komór-kach której wpisuje się numer punktu, jego współrzędne i ewentual-ny kod. Przeglądanie danych dotyczących punktów w oknie „Punk-ty” może nastąpić po uruchomieniu polecenia: „Punkty/Edycja” (rys. 8.34).
W oknie tym znajduje się szereg przycisków, przy pomocy których wykonywane są następujące operacje:
• „Raport” − edycja punktów w postaci stabelaryzowanego pliku RTF lub drukowa-nie wykazu współrzędnych punktów,
• szkic położenia punktów w wybranej skali, • wstawianie, usuwanie i odświeżanie danych, • kasowanie wszystkich punktów,
Rys. 8.32. Opcja
„Wpis punktów”
Rys. 8.30. Wprowadzenie nazwy
obiektu

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 235
• zamykanie okna, • filtrowanie punktów na podstawie ich numerów, kodów lub typów, • wyświetlanie punktów bliskich, mieszczących się w kole o zadanym promieniu, • poszukiwanie punktu o wybranym numerze, • zmiana atrybutów: numeru, kodu lub typu punktu, • statystyka punktów (ilość i zakresy współrzędnych), • przegląd punktów w dodatkowej bazie danych (po jej podłączeniu).
Więcej informacji dotyczących zastosowań programu WinKalk i przykłady obliczeń można znaleźć w „Przewodniku do ćwiczeń z geodezji I”.
8.12.2. Program C-Geo
Program C-Geo wrocławskiej firmy Softline działa w systemie operacyjnym Win-dows (w wersjach: 95, 98, NT, 2000, Millennium, XP) i ma charakter uniwersalny, służy bowiem zarówno do wykonywania obliczeń jak i tworzenia map. Po zainstalowaniu pro-gramu z płyty CD (domyślnie proponuje się instalację w folderze o ścieżce „C:\C-GEO6”) program jest uruchamiany za pomocą ikony z napisem C-GEO, którą dla wygody użytkownika można w formie skrótu umieścić na pulpicie ekranu.
W uproszczeniu praca z programem C-Geo składa się z czterech podstawowych eta-pów obejmujących: założenie projektu, wprowadzenie danych, wykonanie niezbędnych obliczeń geodezyjnych i raportów z obliczeń, wygenerowanie mapy i jej redakcja. Podsta-wowymi pojęciami występującymi w programie są:
• Projekt – plik o nazwie wybranej przez użytkownika, w którym zgrupowane są da-ne w postaci tabel i map. Wyróżnia się także pojęcie Projektu roboczego, czyli pro-jektu, w którym aktualnie wykonywane są prace;
• Tabela − zbiór, w którym zapisane są numery, kody i współrzędne punktów; • Mapa − rysunek mapy utworzony na podstawie danych w tabeli, który bez niej nie
może istnieć; • Obiekt – przedmiot terenowy przedstawiany na mapie (np. budynek, działka itp.).
Rys. 8.33. Okienko wpisu nowego
punktu do bazy danych
Rys. 8.34. Edycja punktów wpisanych do bazy
danych obiektu

8.12. Wybrane programy do przeprowadzania obliczeń geodezyjnych 236
Po uruchomieniu programu ukazuje się okno główne z paskiem menu (rys. 8.35).
Rys. 8.35. Pasek menu głównego programu C-Geo
Na początku pracy trzeba wybrać projekt zapisany wcześniej lub założyć nowy po-przez menu Plik/Projekty (rys. 8.36). Pojawi się wówczas okno zarządzania projektami (rys. 8.39), które umożliwia wprowadzanie nowych projektów i tabel współrzędnych.
Okno dialogowe (rys. 8.39) zawiera listę dostępnych projektów w aktualnym katalo-gu projektów. Bezpośrednio po instalacji programu lista ta jest pusta, toteż chcąc założyć
nowy projekt klikamy na ikonie , po czym w wywołanym okienku „Zakładanie nowe-go projektu” (rys. 8.37) wpisujemy nazwę np. „ćwiczenia” i naciskamy przycisk [�OK].
Rys. 8.36. Wybór
menu „Projekty”
Rys. 8.37. Ustalenie nazwy
projektu Rys. 8.38. Określenie nazwy
tabeli
Rys. 8.39. Okno „Projekty

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 237
Przyciski funkcyjne w oknie „Projekty” zestawione są w trzech grupach: Projekty, Archiwum, Narzędzia (rys. 8.39).
W grupie „Projekty” znajdują się następujące przyciski o następujących funkcjach:
– Otwarcie tabeli zaznaczonej w oknie „Projekty”;
– Założenie nowego projektu po wpisaniu jego nazwy w okienku (rys. 8.37);
– Założenie nowej tabeli po wpisaniu jej nazwy w okienku (rys. 8.38);
– Usunięcie zaznaczonego projektu lub tabeli;
– Wskazanie wcześniej zaznaczonej tabeli jako „tabeli roboczej” z ikoną przy nazwie, w której zapisywane są na bieżąco wyniki obliczeń. Z tabeli tej moduły obliczeniowe pobierają potrzebne dane, toteż przed rozpoczęciem ob-liczeń trzeba założyć w projekcie przynajmniej jedną tabelę roboczą.
– Wskazanie zaznaczonej tabeli jako „tabeli podstawowej” z ikoną . Jest to tabela, w której zapisane dane nie są modyfikowane podczas obliczeń np. współrzędne punktów nawiązania.
– Wyświetlanie zawartości dysków w celu odnalezienia folderu (projektu) za-pisanego w nośnikach pamięci danego komputera.
W grupie „Archiwum” występują następujące przyciski:
– Zapisanie projektu jako tzw. kopii bezpieczeństwa (domyślnie na ścieżce C:\C-geo6\projekty). Do archiwizacji projektów w formie spakowanej wyko-rzystywany jest ogólnie znany program ZIP.
– Wczytanie kopii bezpieczeństwa projektu.
W grupie „Narzędzia” występują następujące przyciski:
– Dokonanie naprawy uszkodzonych plików indeksowych w wybranym projek-cie i wybranej tabeli. Przycisku tego należy użyć w przypadku pojawiających się komunikatów o błędach bazy danych.
– Przycisk do zmiany nazw tabel. Zmiany nazw projektów dokonuje się z po-ziomu eksploratora Windows.
Rys. 8.40. Tabela programu C-Geo z wpisanymi punktami osnowy poziomej

8.12. Wybrane programy do przeprowadzania obliczeń geodezyjnych 238
Wpisywanie współrzędnych punktów i ich oznaczeń oraz kodów wykonuje się w ta-beli (rys. 8.40). Wprowadzanie nowej wartości może polegać na bezpośrednim wpisywa-niu liczb lub imporcie danych z rejestratorów, innych plików albo programów.
Po założeniu tabeli roboczej i wpisaniu współrzędnych punktów nawiązania można przystąpić do obliczeń w zakresie zgodnym z listą zawartą w menu „Obliczenia” (rys. 8.41).
W oknie tabeli znajdują się przyciski spełniające następujące funkcje:
– modyfikacja struktury tabeli (dodawanie kolumn lub wierszy),
– usuwanie zaznaczonych punktów,
– skopiowanie zaznaczonych punktów do bufora,
– wstawianie do tabeli punktów z bufora,
– zaznaczanie wszystkich punktów występujących w tabeli,
– odznaczanie (usunięcie zaznaczenia) wszystkich punktów w tabeli,
– zaznaczanie odwrotne w stosunku do zaznaczenia aktualnego,
– transmisja punktów do tabeli z rejestratorów polowych lub instrumentów,
– sporządzenie wykazu współrzędnych w formie raportu do późniejszego druku,
– wydruk wykazu współrzędnych wg schematu ustalonego w osobnym okienku,
– włączenie/wyłączenie edycji raportów,
– wizualizacja punktów tabeli przez utworzenie ich modelu przestrzennego (3D),
– przejście z okna tabeli do okna przypisanej do niej mapy,
– zamknięcie okna tabeli.
Menu podręczne tabel jest dostępne po naciśnięciu prawego przycisku myszy.
Rys. 8.41. Pozycje menu
„Obliczenia”
Rys. 8.42. Obliczenie azymutu i długości ze współrzędnych

Rozdz. 8: Podstawowe zadania geodezyjne z rachunku współrzędnych 239
Jeśli przykładowo chcemy obliczyć azymut i długość ze współrzędnych, wtedy z me-nu „Obliczenia” wybieramy opcję „Azymuty, długości, kąty”, co powoduje otwarcie okna o tej samej nazwie (rys. 8.42). W oknie tym w odpowiednich komórkach tabeli wpisujemy symbole punktów, po czym naciskamy przycisk „Oblicz” . Dane do obliczeń są pobie-rane z uprzednio założonych tabel, lecz możliwe jest także ich bezpośrednie wpisywanie do formularza modułu obliczeniowego.
Funkc je i kon w modułach obliczeniowych C-Geo są następujące
– Nowe dane - usunięcie wpisanych danych i przygotowanie miejsca dla nowych.
– Wczytaj zadanie - wczytanie z dysku zadań zapisanych wcześniej.
– Zapisz zadanie - zapisanie wprowadzonych danych na dysk.
– Oblicz - wykonanie obliczeń.
– Raport - przygotowanie raportu dla opcji RAPORTY. Wybór tej opcji powoduje wykonanie obliczeń i zapisanie wyników do specjalnego zbioru.
– Wydruk wyników obliczeń
– Rysunek - wykonanie rysunku dla wyników obliczeń.
– Na mapę - przeniesienie rysunku na mapę. Jeżeli dla aktualnego zbioru roboczego jest założona mapa, użycie tego przycisku powoduje przeniesienie rysunku oblicza-nej konstrukcji na mapę.
– Edycja kodów punktów – włączanie/wyłączanie możliwości pokazywania kodów.
– Zamknięcie modułu.
– Odległość pozioma (w danych lub wynikach obliczeń),
– Odległość skośna (w danych lub wynikach obliczeń),
Powyższe funkcje są również dostępne w menu podręcznym wyświetlanym po naci-śnięciu prawego klawisza myszki na edytorze zadania. Do menu zadania są także przypi-sane skróty klawiszowe pozwalające na wywołanie żądanej opcji bezpośrednio z klawiatu-ry. Więcej informacji dotyczących zastosowań programu C-Geo wraz z przykładami obli-czeń zamieszczono w „Przewodniku do ćwiczeń z geodezji I” (wyd. II).

Geodezja Tom 1
Andrzej Jagielski
Niniejsza darmowa publikacja zawiera jedynie fragment pełnej wersji
całej publikacji.
Aby przeczytać ten tytuł w pełnej wersji kliknij tutaj.
Niniejsza publikacja może być kopiowana, oraz dowolnie rozprowadzana tylko i wyłącznie w formie
dostarczonej przez Wydawnictwo GEODPIS. Zabronione są jakiekolwiek zmiany w zawartości publikacji
bez pisemnej zgody Wydawnictwa GEODPIS - wydawcy niniejszej publikacji. Zabrania się jej
odsprzedaży.
Pełna wersja niniejszej publikacji jest do nabycia w sklepie
internetowym
www.witmir.pl