Fizyka. |pdf
75
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego FIZYKA MATERIAŁY DO ZAJĘĆ WYRÓWNAWCZYCH DLA I ROKU INŻYNIERII MATERIAŁOWEJ WYDZIAŁU MECHANICZNEGO POLITECHNIKI KRAKOWSKIEJ Elżbieta Augustyn
-
Upload
phungnguyet -
Category
Documents
-
view
270 -
download
2
Transcript of Fizyka. |pdf

Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
FIZYKA
MATERIAŁY DO ZAJĘĆ WYRÓWNAWCZYCH
DLA I ROKU
INŻYNIERII MATERIAŁOWEJ
WYDZIAŁU MECHANICZNEGO
POLITECHNIKI KRAKOWSKIEJ
Elżbieta Augustyn

2
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego

3
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
SPIS TREŚCI
Wektory i działania na wektorach ………………………………………………………..
Współrzędne biegunowe, cylindryczne i sferyczne ……………………………………...
Ruch prostoliniowy ………………………………………………………………………
Ruch krzywoliniowy, ruch po okręgu ……………………………………...…………….
Ruch dwuwymiarowy ……………………………………………………………………
Środek masy, zasada zachowania pędu i energii …………………………………………
Zasady dynamiki Newtona, tarcie, praca ……………………………………...…………
Elektrostatyka ……………………………………………………………………………
Prąd stały …………………………………………………………………………………
Elementy szczególnej teorii względności ………………………………………………..
Hydrostatyka …………………………………………………………………………….
Literatura …………………………………………………………………………………
5
12
18
24
31
36
41
46
54
61
66
71

4
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego

5
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
WEKTORY I DZIAŁANIA NA WEKTORACH
1. Wektory w układzie współrzędnych.
Wektorem o początku A i końcu B nazywamy uporządkowaną parę punktów A i B.
Dane są dwa punkty 𝐴 = (𝑥𝐴, 𝑦𝐴) i 𝐵 = (𝑥𝐵, 𝑦𝐵) na płaszczyźnie XY.
Współrzędne wektora 𝐴𝐵 wyrażają się wzorem:
𝐴𝐵 = [𝑥𝐵 − 𝑥𝐴, 𝑦𝐵 − 𝑦𝐴]=[𝑎1, 𝑎2]
Odległość punktów A i B będziemy nazywać długością wektora 𝐴𝐵 , co możemy
wyrazić wzorem:
|𝐴𝐵 | = √(𝑥𝐵 − 𝑥𝐴)2 + (𝑦𝐵 − 𝑦𝐴)2 = √𝑎12 + 𝑎2
2
Cechy wektora:
zwrot wektora 𝐴𝐵 , czyli zwrot półprostej AB na której leży wektor
kierunek wektora 𝐴𝐵 - dwa wektory mają ten sam kierunek, gdy proste
wyznaczone przez te wektory mają ten sam kierunek
wartość wektora 𝐴𝐵 - długość wektora, czyli odległość między punktami
A i B

6
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
2. Wektory równe i przeciwne.
Dwa wektory nazywamy przeciwnymi, jeżeli mają ten sam kierunek i równe długości
oraz przeciwne zwroty. Wektorem przeciwnym do wektora 𝐴𝐵 będzie wektor −𝐵𝐴 .
Dwa wektory nazywamy równymi, jeżeli mają ten sam kierunek i zwrot oraz równe
długości.
3. Działania na wektorach.
Dane są dwa wektory 𝑎 = [𝑎1, 𝑎2, 𝑎3] i = [𝑏1, 𝑏2, 𝑏3] oraz 𝑘 ∈ ℝ.
Dodawanie wektorów:
Sumą tych wektorów będzie wektor postaci:
𝑎 + = [𝑎1, 𝑎2, 𝑎3] + [𝑏1, 𝑏2, 𝑏3] = [𝑎1 + 𝑏1, 𝑎2 + 𝑏2, 𝑎3 + 𝑏3]
Odejmowanie wektorów:
Różnicą tych wektorów będzie wektor postaci:
𝑎 − = [𝑎1, 𝑎2, 𝑎3] − [𝑏1, 𝑏2, 𝑏3] = [𝑎1 − 𝑏1, 𝑎2 − 𝑏2, 𝑎3 − 𝑏3]
Mnożenie wektora przez liczbę rzeczywistą:
Iloczyn liczby rzeczywistej i wektora wyraża wzór:
𝑘 𝑎 = 𝑘[𝑎1, 𝑎2, 𝑎3] = [𝑘𝑎1, 𝑘𝑎2, 𝑘𝑎3]

7
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
4. Iloczyn skalarny i jego własności.
Iloczynem skalarnym niezerowych wektorów 𝑎 = [𝑎1, 𝑎2, 𝑎3] i = [𝑏1, 𝑏2, 𝑏3] nazywamy liczbę równą iloczynowi długości tych wektorów przez cosinus kąta
zawartego między nimi:
𝑎 ° = |𝑎 || | cos(𝑎 , ) = 𝑎1𝑏1 + 𝑎2𝑏2 + 𝑎3𝑏3
Cosinus kąta zawartego między niezerowymi wektorami:
Z definicji iloczynu skalarnego bezpośrednio otrzymujemy jeszcze wzór na cosinus
kąta zawartego między niezerowymi wektorami 𝑎 = [𝑎1, 𝑎2, 𝑎3] i = [𝑏1, 𝑏2, 𝑏3]:
cos(𝑎 , ) =𝑎 °
|𝑎 || |
Własności iloczynu skalarnego:
𝑎 °𝑎 = 𝑎2
𝑎 ° = °𝑎
(𝑘𝑎 ) ° = 𝑘(𝑎 ° ) = 𝑎 °(𝑘 )
𝑐 °(𝑎 + ) = 𝑐 °𝑎 + 𝑐 °
𝑎 ° = 0 ⇒ 𝑎 ⊥

8
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Cosinusy kierunkowe wektora.
Niezerowy wektor 𝑎 = [𝑎1, 𝑎2, 𝑎3] tworzy z osiami układu współrzędnych
odpowiednio kąty α, β, γ równe:
cos 𝛼 =𝑎𝑥
|𝑎 |
cos 𝛽 =𝑎𝑦
|𝑎 |
cos 𝛾 =𝑎𝑧
|𝑎 |
Rzut wektora na wektor.
Dane są dwa niezerowe wektory 𝑎 = [𝑎1, 𝑎2, 𝑎3] i = [𝑏1, 𝑏2, 𝑏3] i kąt α między
nimi. Rzutem wektora 𝑎 na wektor nazywamy wektor 𝑎𝑏 o długości:
|𝑎𝑏 | = |𝑎 | cos 𝛼
5. Iloczyn wektorowy i jego własności.
γ
β α
a
z
x
y
0

9
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Iloczynem wektorowym pary wektorów niekolinernych 𝑎 = [𝑎1, 𝑎2, 𝑎3] i
= [𝑏1, 𝑏2, 𝑏3] nazywamy taki wektor𝑐 = 𝑎 × spełniający warunki:
Długość wektora 𝑐 jest równa polu równoległoboku rozpiętego na wektorach 𝑎
i , czyli: |𝑎 × | = |𝑎 || | sin(𝑎, ).
Wektor 𝑐 jest prostopadły do płaszczyzny wyznaczonej przez wektory 𝑎 i .
Zwrot wektora 𝑐 jest taki, aby uporządkowana trójka wektorów 𝑎 , , 𝑐 miała
orientację zgodną z przyjętą orientacją przestrzeni.
Iloczyn wektorowy możemy również policzyć korzystając ze wzoru:
𝑎 × = |𝑖 𝑗
𝑎1 𝑎2 𝑎3
𝑏1 𝑏2 𝑏3
| = [𝑎2𝑏3 − 𝑎3𝑏2, 𝑎3𝑏1 − 𝑎1𝑏3, 𝑎1𝑏2 − 𝑎2𝑏1]
Geometrycznie długość wektora będącego iloczynem wektorowym 𝑎 × jest równa
polu równoległoboku rozpiętego na wektorach 𝑎 i .
Własności iloczynu wektorowego:
𝑎 × 𝑎 = 0
𝑎 × = − × 𝑎
(𝑘𝑎 ) × = 𝑘(𝑎 × ) = 𝑎 × (𝑘 )
(𝑎 + ) × 𝑐 = 𝑎 × 𝑐 + × 𝑐
𝑎 × = 0 ⇒ 𝑎 ∥
6. Iloczyn mieszany i jego własności.
Iloczynem mieszanym trzech wektorów 𝑎 , , 𝑐 nazywamy liczbę:

10
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
(𝑎 𝑐 ) = (𝑎 × ) °𝑐
Własności iloczynu mieszanego:
(𝑎 × ) °𝑐 = −( × 𝑎 ) °𝑐
(𝑎 × ) °𝑐 = −(𝑎 × 𝑐 ) °
(𝑎 × ) °𝑐 = (𝑐 × 𝑎 ) ° = ( × 𝑐 ) °𝑎
(𝑎 × ) °𝑐 = 0 ⇔ 𝑎 , , 𝑐 𝑠ą 𝑘𝑜𝑚𝑝𝑙𝑎𝑛𝑎𝑟𝑛𝑒
Geometrycznie długość wektora będącego iloczynem mieszanym (𝑎 × ) °𝑐
jest równa objętości równoległościanu rozpiętego na wektorach 𝑎 , i 𝑐 .
ZADANIA
1. Dane są punkty 𝐾 = (2,−1,2), 𝐿 = (−2,4, −10), 𝑀 = (−4,−√3, 1) . Znajdź
współrzędne wektorów: 𝐾𝐿 , 𝑀𝐾 , 𝐿𝑀 , oraz oblicz ich długość. Znajdź 𝐾𝐿 + 𝐿𝑀 oraz
𝑀𝐾 − 𝐾𝐿 .
2. Dane są dwa wektory: 𝑎 = −𝑖 + 4𝑗 + 2 , = 5𝑖 − 2 . Obliczyć:
a) Długość wektora |𝑎 | i | |
b) Iloczyn skalarny 𝑎 ° ,
c) Kąt zawarty między wektorami 𝑎 i ,
d) Iloczyn wektorowy 𝑎 × ,
e) Iloczyn wektorowy × 𝑎 ,
f) Iloczyn 𝑎 °(𝑎 × )
g) Iloczyn °(𝑎 × )
3. Znajdź cosinusy kierunkowe wektorów 𝑎 = (4,−1,−2) i = (−2,1, −1).

11
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
4. Znaleźć rzut wektora 𝑎 = 2𝑖 − 3𝑗 + na oś o kierunku wektora = −𝑖 − 4𝑗 + 2 i
odwrotnie rzut wektora na oś o kierunku 𝑎 .
5. Udowodnij poniższe tożsamości:
a) 𝑎 × ( × 𝑐 ) + × (𝑎 × 𝑐 ) + 𝑐 × (𝑎 × ) = 0
b) (𝑎 × ) × (𝑎 × 𝑐 ) = (𝑎 𝑐 )°𝑎
c) (𝑎 × ) °𝑐 = −(𝑎 × 𝑐 ) °
d) 𝑎 °( °𝑐 ) = °(𝑐 °𝑎 )-𝑐 °(𝑎 ° )
6. Znajdź sinus i cosinus kąta między wektorami 𝑎 i , jeżeli:
a) 𝑎 = (1,−1,2) = (−2,1, −5)
b) 𝑎 = (−3,4,4) = (−2,−1,2)
c) 𝑎 = (1,9, −2) = (3,1, −6)
d) 𝑎 = (5,0, −5) = (4,−1, −2)
7. Dane są trzy wektory: 𝑎 = −4𝑖 + 𝑗 − 3 , = 5𝑖 + 5𝑗 − 2 oraz 𝑐 = −2𝑖 + 6𝑗 − .
Znajdź pole równoległoboku rozpiętego na wektorach 𝑎 i oraz objętość
równoległościanu rozpiętego na wektorach 𝑎 , oraz 𝑐 .
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA
8. Dane są punkty 𝐸 = (1,−1,6), 𝐹 = (−2,1, −1), 𝐺 = (2,−√5,−1) . Znajdź:
a) współrzędne wektorów: 𝐸𝐹 , 𝐹𝐺 , 𝐸𝐺 ,
b) oblicz długość wektorów 𝐸𝐹 , 𝐹𝐺 , 𝐸𝐺 ,
c) współrzędne wektorów: 𝐸𝐹 + 𝐺𝐸 oraz 𝐹𝐺 − 𝐸𝐹 ,
d) iloczyny skalarne: 𝐸𝐹 °𝐸𝐺 , 𝐹𝐺 °𝐺𝐸 ,
e) iloczyny wektorowe: 𝐹𝐸 × 𝐸𝐺 , 𝐹𝐺 × 𝐺𝐸 ,
f) pole równoległoboku rozpiętego na wektorach 𝐸𝐹 i 𝐹𝐺
g) objętość równoległościanu rozpiętego na wektorach 𝐸𝐹 , 𝐹𝐺 i 𝐸𝐺 .
9. Dane są trzy wektory: 𝑎 = −2𝑖 + 𝑗 + 3 , = −2𝑖 + 4𝑗 − , 𝑐 = 𝑖 + 3𝑗 −
Obliczyć:
a) długości wektorów 𝑎 , , 𝑐 ,
b) iloczyny skalarne 𝑎 ° , 𝑎 °𝑐 , 𝑐 °

12
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
c) cosinus kąta zawartego między wektorami 𝑎 i ,
d) sinus kąta zawartego między wektorami 𝑐 i ,
e) iloczyny wektorowe 𝑎 × , × 𝑐 , 𝑎 × 𝑐 ,
f) iloczyn 𝑎 °(𝑐 × )
g) iloczyn 𝑐 °(𝑎 × )
h) iloczyn (𝑎 × ) × (𝑎 × 𝑐 )
i) iloczyn mieszany (𝑎 𝑐 )
10. Znajdź cosinusy kierunkowe wektorów = (−1,−3,2) i = (−12,−5,1),
𝑜 = (−1,−3,0).
11. Znaleźć rzut wektora 𝑎 = 5𝑖 − 5𝑗 + 2 na oś o kierunku wektora = −2𝑖 + 4𝑗 − 2
i odwrotnie rzut wektora na oś o kierunku 𝑎 .
WSPÓŁRZĘDNE BIEGUNOWE, CYLINDRYCZNE I SFERYCZNE
1. Współrzędne biegunowe.
Oprócz kartezjańskiego układu współrzędnych na płaszczyźnie możemy wprowadzić
jeszcze biegunowy układ współrzędnych.
Niech dany będzie punkt 𝑃 = (𝑥, 𝑦) w kartezjańskim układzie współrzędnych na
płaszczyźnie. Wielkości r i 𝜑 nazywamy współrzędnymi biegunowymi.

13
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Gdzie: r – długość promienia wodzącego, czyli odległość punktu P od początku układu
współrzędnych, 𝑟 > 0, 𝑟 = √𝑥2 + 𝑦2
𝜑 - kąt skierowany, zawarty między osią OX a promieniem wodzącym, zwany
argumentem punktu P, 0 ≤ 𝜑 < 2𝜋, lub −𝜋 ≤ 𝜑 ≤ 𝜋
Punkt P w kartezjańskim układzie współrzędnych ma współrzędne równe (𝑥, 𝑦), natomiast w biegunowym układzie współrzędnych ma współrzędne (𝑟, 𝜑). Miedzy
tymi współrzędnymi zachodzi następująca zależność:
𝑥 = 𝑟𝑐𝑜𝑠𝜑
𝑦 = 𝑟𝑠𝑖𝑛𝜑
Przykład 1:
Znaleźć współrzędne biegunowe punktu P danego w układzie kartezjańskim 𝑃 =
(4, 4√3).
Punkt P we współrzędnych biegunowych będzie miał współrzędne r i 𝜑. Najpierw
obliczymy długość promienia wodzącego r, a następnie znajdziemy funkcje
trygonometryczne kąta 𝜑. A zatem:
𝑟 = √42 + (4√3)2= √16 + 48 = √64 = 8
sin𝜑 =4√3
8=
√3
2
cos𝜑 =4
8=
1
2
Kąt 𝜑 będzie miał miarę 𝜋
3.
Współrzędne biegunowe punktu P są następujące:
𝑟 = 8
𝜑 =𝜋
3
P
𝜑
r
y
x

14
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
A zatem 𝑃 = (8,𝜋
3).
2. Współrzędne cylindryczne (walcowe).
Niech dany będzie punkt 𝑃 = (𝑥, 𝑦, 𝑧) w kartezjańskim układzie współrzędnych w
przestrzeni. Wielkości r, 𝜑 i z nazywamy współrzędnymi cylindrycznymi.
Liczby r i 𝜑 są współrzędnymi biegunowymi rzutu punktu 𝑃 = (𝑥, 𝑦, 𝑧) na
płaszczyznę XY, natomiast r jest odległością punktu P od osi OZ.
Gdzie: r – długość promienia wodzącego, czyli odległość punktu P od początku układu
współrzędnych, 𝑟 > 0, 𝑟 = √𝑥2 + 𝑦2
𝜑 - kąt skierowany, zawarty między osią OX a promieniem wodzącym, zwany
argumentem punktu P, 0 ≤ 𝜑 < 2𝜋, lub −𝜋 ≤ 𝜑 ≤ 𝜋
Punkt P w kartezjańskim układzie współrzędnych ma współrzędne równe (𝑥, 𝑦, 𝑧), natomiast w biegunowym układzie współrzędnych ma współrzędne (𝑟, 𝜑, 𝑧). Miedzy
tymi współrzędnymi zachodzi następująca zależność:
𝑥 = 𝑟𝑐𝑜𝑠𝜑
𝑦 = 𝑟𝑠𝑖𝑛𝜑
𝑧 = 𝑧
x
0
𝑟 0
𝑧 0
𝜑
x
y
z

15
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Przykład 2:
Znaleźć współrzędne cylindryczne punktu P danego w układzie kartezjańskim
𝑃 = (2, 2√3, 5).
Punkt P we współrzędnych cylindrycznych będzie miał współrzędne r, 𝜑 i z. Najpierw
obliczymy długość promienia wodzącego r, a następnie znajdziemy funkcje
trygonometryczne kąta 𝜑. A zatem:
𝑟 = √22 + (2√3)2= √4 + 12 = √16 = 4
sin𝜑 =2√3
4=
√3
2
cos𝜑 =2
4=
1
2
Kąt 𝜑 będzie miał miarę 𝜋
3.
Współrzędne cylindryczne punktu P są następujące:
𝑟 = 4
𝜑 =𝜋
3
𝑧 = 5
A zatem 𝑃 = (4,𝜋
3, 5).
3. Współrzędne sferyczne (kuliste).
Niech dany będzie punkt 𝑃 = (𝑥, 𝑦, 𝑧) w kartezjańskim układzie współrzędnych w
przestrzeni. Wielkości r, 𝜑 i 𝜃 nazywamy współrzędnymi sferycznymi.

16
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Gdzie: r – długość promienia wodzącego, czyli odległość punktu P od początku układu
współrzędnych, 𝑟 > 0, 𝑟 = √𝑥2 + 𝑦2 + 𝑧2
𝜑 – azymut, czyli kąt skierowany, zawarty między osią OX a rzutem promienia
wodzącego na płaszczyznę XY, 0 ≤ 𝜑 < 2𝜋
𝜃 - odległość zenitalna, czyli kąt skierowany, zawarty między osią OZ a
promieniem wodzącym, −𝜋
2≤ 𝜃 ≤
𝜋
2
Punkt P w kartezjańskim układzie współrzędnych ma współrzędne równe (𝑥, 𝑦, 𝑧), natomiast w biegunowym układzie współrzędnych ma współrzędne (𝑟, 𝜑, 𝜃). Miedzy
tymi współrzędnymi zachodzi następująca zależność:
𝑥 = 𝑟 sin 𝜃 𝑐𝑜𝑠𝜑
𝑦 = 𝑟 sin 𝜃 𝑠𝑖𝑛𝜑
𝑧 = 𝑟 cos 𝜃
Przykład 3:
Znaleźć współrzędne sferyczne punktu P danego w układzie kartezjańskim 𝑃 =
(2, 2√3, 4√3).
Punkt P we współrzędnych cylindrycznych będzie miał współrzędne r, 𝜑 i 𝜃. Najpierw
obliczymy długość promienia wodzącego r, a następnie znajdziemy funkcje
trygonometryczne kąta 𝜑 oraz 𝜃. A zatem:
r
P
𝜃
𝜑
z
x y
x
y
z

17
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
𝑟 = √22 + (2√3)2+ (4√3)
2= √4 + 12 + 48 = √64 = 8
sin𝜑 =2√3
√22 + (2√3)2=
2√3
4=
√3
2
cos𝜑 =2
√22 + (2√3)2=
2
4=
1
2
Kąt 𝜑 będzie miał miarę 𝜋
3.
sin 𝜃 =
√22 + (2√3)2
8=
4
8=
1
2
cos 𝜃 =4√3
8=
√3
2
Kąt 𝜃 będzie miał miarę 𝜋
6.
Współrzędne cylindryczne punktu P są następujące:
𝑟 = 8
𝜑 =𝜋
3
𝜃 =𝜋
6
A zatem 𝑃 = (8,𝜋
3,𝜋
6).
ZADANIA
1. Znaleźć współrzędne biegunowe punktu P, który w układzie kartezjańskim ma
współrzędne 𝑃 = (1, √3).
2. Punkt A w biegunowym układzie współrzędnych ma następujące współrzędne
𝐴 = (2,𝜋
6). Znaleźć jego współrzędne w kartezjańskim układzie współrzędnych.
3. Dane jest równanie krzywej 𝑥2 + 𝑦2 = 𝑎2 w kartezjańskim układzie współrzędnych.
Napisać równanie tej krzywej w biegunowym układzie współrzędnych, którego
biegun pokrywa się z początkiem układu współrzędnych a oś biegunowa pokrywa się
z osią OX.
4. Dane są punkty we współrzędnych biegunowych 𝐴 = (1,𝜋
6), 𝐵 = (8,
3𝜋
4). Punkt O
jest biegunem. Obliczyć pole trójkąta AOB oraz jego obwód.

18
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
5. Punkt A we współrzędnych kartezjańskich ma współrzędne równe 𝐴 = (2, −√3, 1).
Znaleźć jego współrzędne w układzie cylindrycznym.
6. Dany jest punkt 𝐴 = (2,5𝜋
3, 1) we współrzędnych cylindrycznych. Znaleźć jego
współrzędne w układzie kartezjańskim.
7. Dany jest punkt 𝐴 = (4,𝜋
3,𝜋
4) we współrzędnych sferycznych. Znaleźc jego
współrzędne w układzie kartezjańskim oraz cylindrycznym.
8. Punkt A we współrzędnych kartezjańskich ma współrzędne równe 𝐴 = (1, √2,−1).
Znaleźć jego współrzędne w układzie sferycznym.
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA
9. Znaleźć współrzędne biegunowe punktu P, który w układzie kartezjańskim ma
współrzędne 𝑃 = (4, 2√2).
10. Punkt A w biegunowym układzie współrzędnych ma następujące współrzędne
𝐴 = (3,𝜋
4). Znaleźć jego współrzędne w kartezjańskim układzie współrzędnych.
11. Dane jest równanie krzywej 2𝑥2 + 4𝑦2 = 𝑎2 w kartezjańskim układzie
współrzędnych. Napisać równanie tej krzywej w biegunowym układzie
współrzędnych, którego biegun pokrywa się z początkiem układu współrzędnych a oś
biegunowa pokrywa się z osią OX.
12. Punkty A i B we współrzędnych kartezjańskich ma współrzędne równe 𝐴 =
(2,−√3, 1) oraz 𝐵 = (1, √2,−1). Znaleźć ich współrzędne w układzie
cylindrycznym oraz obliczyć odległość między nimi.
13. Dany jest punkt 𝐴 = (6,𝜋
6,3𝜋
4) we współrzędnych sferycznych. Znaleźć jego
współrzędne w układzie kartezjańskim oraz cylindrycznym.
14. Punkt A we współrzędnych kartezjańskich ma współrzędne równe 𝐴 = (2, −√3,−2).
Znaleźć jego współrzędne w układzie sferycznym.

19
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
RUCH PROSTOLINIOWY
1. Względność ruchu.
Jeżeli względem pewnego układu odniesienia poruszają się dwa ciała A i B z
prędkościami odpowiednio równymi 𝑣𝐴 i 𝑣𝐵 , to prędkość ciała A względem ciała B
jest równa prędkości jaką ma ciało A widziane przez obserwatora znajdującego się w
układzie odniesienia, w którym spoczywa ciało B. Prędkość tą nazywamy prędkością
względną.
Jeżeli dwa ciała A i B poruszają się z prędkościami odpowiednio równymi 𝑣𝐴 i 𝑣𝐵 ,
skierowanymi w tę samą stronę, to prędkość względna jest równa różnicy tych
prędkości.
𝑣𝐴𝐵 = 𝑣𝐴 − 𝑣𝐵
Jeżeli dwa ciała A i B poruszają się z prędkościami odpowiednio równymi 𝑣𝐴 i 𝑣𝐵 ,
skierowanymi w przeciwną stronę, to prędkość względna jest równa sumie tych
prędkości.
𝑣𝐴𝐵 = 𝑣𝐴 + 𝑣𝐵
Jeżeli dwa ciała A i B poruszają się z prędkościami odpowiednio równymi 𝑣𝐴 i 𝑣𝐵 ,
skierowanymi pod kątem prostym, to prędkość względna liczymy zgodnie z
twierdzeniem Pitagorasa:
𝑣𝐴𝐵 = √𝑣𝐴2 + 𝑣𝐵
2
2. Prędkość chwilowa.

20
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Prędkość chwilowa ciała to rzeczywista prędkość jaką posiada ciało w danej chwili.
𝑣 = (∆𝑟
∆𝑡)∆𝑡→0
3. Prędkość średnia a szybkość średnia.
Prędkością średnią ciała nazywamy stosunek wektora przemieszczenia do czasu, w
którym to przemieszczenie nastąpiło, czyli:
𝑣 ś𝑟 =∆𝑟
∆𝑡
Szybkością średnią ciała nazywamy stosunek drogi przebytej przez to ciało do czasu,
w którym została ona przebyta, czyli:
𝑣ś𝑟 =𝑠
𝑡=
∆𝑠
∆𝑡
4. Definicja przyspieszenia średniego i chwilowego.
Przyspieszeniem średnim nazywamy stosunek przyrostu prędkości do czasu, w
którym ten przyrost nastąpił, czyli:
𝑎 ś𝑟 =∆𝑣
∆𝑡
Przyspieszeniem chwilowym, czyli przyspieszeniem w danej chwili nazywamy
wielkość:

21
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
𝑎 = (∆𝑣
∆𝑡)∆𝑡→0
5. Przyspieszenie w ruchu prostoliniowym.
Jeżeli ciało porusza się wzdłuż prostej, to mamy możliwe dwa kierunki przyspieszenia
dodatni i ujemny.
Jeżeli ciało porusza się w kierunku, w którym wartość prędkości wzrasta, to wektory
przyspieszenia i prędkości są zwrócone zgodnie.
Natomiast jeżeli ciało porusza się w kierunku, w którym wartość prędkości maleje,
wektor przyspieszenia jest zwrócony przeciwnie do wektora prędkości. Przyspieszenie
to nazywamy wtedy opóźnieniem.
6. Ruch jednostajnie zmienny prostoliniowy.
Ciało porusza się ruchem jednostajnie zmiennym prostoliniowym, gdy porusza się po
linii prostej ze stałym przyspieszeniem dodatnim lub ujemnym. Jeżeli przyspieszenie
jest dodatnie, to mówimy, że ruch jest prostoliniowy jednostajnie przyspieszony.
Natomiast jeżeli przyspieszenie jest ujemne, to mówimy, że ruch jest prostoliniowy
jednostajnie opóźniony.
Droga w ruchu prostoliniowym jednostajnie zmiennym:
Droga w ruchu prostoliniowym jednostajnie zmiennym jest kwadratową funkcją czasu
i wyraża się wzorem:
𝑠 = 𝑠0 + 𝑣0𝑡 +𝑎𝑡2
2
gdzie: 𝑠0 - droga początkowa
𝑣0 - prędkość początkowa
a – przyspieszenie (opóźnienie)
Prędkość w ruchu prostoliniowym jednostajnie zmiennym:
Prędkość ciała v w dowolnej chwili w ruchu prostoliniowym jednostajnie zmiennym
możemy wyliczyć ze wzoru:
𝑣 = 𝑣0 + 𝑎𝑡

22
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
gdzie: 𝑣0 - prędkość początkowa
a – przyspieszenie (opóźnienie)
ZADANIA
1. Dwa tramwaje A i B jadą po sąsiednich torach z prędkościami odpowiednio
hkm70vA i hkm100vB . Jaka jest prędkość względna tramwaju B względem
A, gdy tramwaje te poruszają się:
a) w przeciwne strony,
b) w tę samą stronę.
c) prostopadle do siebie
2. Samochód pokonał trasę z Krakowa do Radomia w ciągu 2 godziny i 10 minut. Jaka
była średnia prędkość samochodu na tej trasie, jeśli wiadomo, że długość drogi
między Krakowem a Radomiem wynosi 196 km?
3. Łódź płynie z przystani P do Q i z powrotem. Zajmuje jej to 3 godziny. Jej prędkość
względem wody wynosi 6m/s a stała prędkość nurtu rzeki wynosi 4m/s. Oblicz średnią
szybkość łodzi względem brzegów. Ile wynosi odległość z przystani P do Q?
4. Biegacz przebiegł połowę trasy z prędkością hkm18v1 , a drugą połowę z inną
prędkością v2. Gdyby biegł cały czas ze stałą prędkością hkm12v to czas
potrzebny na przebycie całej trasy nie zmieniłby się. Oblicz wartość prędkości v2.[3]
5. Rowerzysta przejechał 4
1 drogi z prędkością sm5v1 i pozostałe
4
3 drogi z
prędkością sm8v2 . Obliczyć średnią prędkość rowerzysty na całej trasie.
6. Prędkość łodzi względem wody w spoczynku wynosi sm4v1 . Woda w rzece
płynie z prędkością sm3v2 . Oblicz, jak należy skierować łódź, aby przepłynąć
rzekę w kierunku prostopadłym do brzegów oraz w jakim czasie ta łódź przepłynie
rzekę o szerokości m100d ?
7. Samochód jadący z prędkością sm75v1 hamuje na drodze m140s zmniejszając
swą prędkość do sm15v2 . Zakładając, że ruch samochodu jest jednostajnie
zmienny, znaleźć przyspieszenie i czas hamowania tego samochodu.

23
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
8. Samochód jadący z prędkością hkm108v1 w pewnej chwili zaczął hamować. W
rezultacie zatrzymał się po upływie s10t . Zakładając, że ruch samochodu był
jednostajnie zmienny, wyznacz przyspieszenie samochodu oraz drogę, jaką przebył on
od chwili rozpoczęcia hamowania.
9. Zmotoryzowana kolumna wojskowa, której długość wynosi 𝑠 = 5𝑘𝑚, porusza się ze
stałą prędkością 𝑣1 = 10
. Z czoła kolumny został wysłany na jej tyły motocyklista z
meldunkiem. Prędkość motocyklisty wynosiła 𝑣2 = 2
. Po jakim czasie
motocyklista potwierdzi wykonanie rozkazu.[5]
10. Jaka drogę przebędzie ciało w ciągu piątej i siódmej sekundy ruchu jednostajnie
przyspieszonego, skoro jego prędkość po dwóch sekundach ruchu wynosi 𝑣1 = 2
.
Zakładamy, że prędkość początkowa jest równa zeru.
11. Dwa pojazdy jechały jednakowo długo. Pierwszy z nich połowę czasu jechał z
przyspieszeniem a a drugą połowę z przyspieszeniem 3a. Drugi z kolei pierwszą
połowę czasu jechał z przyspieszeniem 3a a drugą z przyspieszeniem a. Który z nich
przebył dłuższą drogę? Który z nich osiągnął większą prędkość końcową?
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA
12. Pierwszą połowę drogi samochód przebył z prędkością hkm72v1 a drugą z
prędkością hkm1082 v . Obliczyć średnią prędkość samochodu na tej trasie.
13. Kamil przygotowując się do zawodów przebiegł dwie piąte trasy z prędkością
hkm12v1 , a pozostałą część z inną prędkością. Gdyby biegł cały czas ze stałą
prędkością hkm18v to czas potrzebny na przebycie całej trasy nie zmieniłby się.
Oblicz z jaką prędkością Kamil przebiegł pozostałą część trasy. Jaką długość miała ta
trasa?
14. Znaleźć prędkość motorówki na stojącej wodzie, jeżeli podczas ruchu z prądem rzeki
szybkość tej motorówki względem brzegu wynosi sm15v1 a podczas ruchu pod
prąd sm8v2 . Jaka jest prędkość prądu wody w rzece?

24
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
15. Samolot leci z miasta A do miasta B, położonego względem A o km2800s na
zachód. Prędkość samolotu względem powietrza wynosi hkm800v1 . Obliczyć
czasy przelotu samolotu:
a) przy bezwietrznej pogodzie,
b) gdy na całej trasie wieje wiatr z północy na południe z prędkością sm30v2 .
c) gdy na całej trasie wieje wiatr z zachodu na wschód z prędkością sm20v2 .
16. W czasie s10t ciało poruszające się z prędkością sm8v0 zwiększyło swoją
prędkość pięciokrotnie. Oblicz stałe przyspieszenie ciała, prędkość średnią oraz drogę
przebytą przez ciało w czasie t. Przedstaw na wykresie drogę przebytą przez ciało w
czasie t.
17. Dwa ciała poruszają się ruchem jednostajnie przyspieszonym. Stosunek ich
przyspieszeń wynosi 3:4, stosunek czasów trwania ich ruchu jest równy 3:7. Oblicz w
jakim stosunku pozostają drogi przebyte przez te ciała?
18. Z jakim opóźnieniem poruszał się łyżwiarz, który mając prędkość początkową równą
𝑣0 = 8
, zatrzymał się po przebyciu drogi równej 𝑠 = 60𝑚? Oblicz czas po który
łyżwiarz się zatrzymał.
19. Oblicz drogę, jaką przebędzie ciało poruszające się z przyspieszeniem 𝑎 = 4
2 bez
prędkości początkowej w piątej sekundzie ruchu.
20. Po jakim czasie ruchu jednostajnie przyspieszonego z prędkością początkową
𝑣0 = 6
ciało osiągnie prędkość 𝑣1 = 16
, jeżeli przyspieszenie wynosi 𝑎 = 3
2?
Ile będzie wynosiła droga przebyta przez to ciało?

25
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
RUCH KRZYWOLINIOWY, RUCH PO OKRĘGU
1. Przyspieszenie w ruchu krzywoliniowym.
W ruchu krzywoliniowym wektor przyspieszenia z rozkładamy na dwie składowe:
składową styczną i składową normalną.
𝑎 = 𝑎 + 𝑎𝑛
a s a n
a v
R

26
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Przyspieszenie styczne odpowiada za zmianę wartości prędkości i wyraża się wzorem:
𝑎 = (∆𝑣
∆𝑡)∆𝑡→0
Natomiast przyspieszenie normalne wiąże się ze zmianą kierunku wektora prędkości i
możemy go wyrazić jako iloraz kwadratu prędkości ciała do jego promienia
krzywizny toru, czyli:
𝑎𝑛 =𝑣2
𝑅
Całkowite przyspieszenie możemy obliczyć korzystając z twierdzenia Pitagorasa:
𝑎 = √𝑎 2 + 𝑎𝑛
2
2. Prędkość kątowa.
Prędkością kątową nazywamy stosunek kąta zakreślonego przez promień wodzący do
czasu, w którym to nastąpiło, czyli:
𝜔 = (∆𝛼
∆𝑡)∆𝑡→0
Związek między prędkością liniową i kątową określa wzór:
𝜔 =𝑣
𝑅

27
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
3. Przyśpieszenie kątowe.
Przyspieszeniem kątowym nazywamy stosunek zmian prędkości kątowej do czasu, w
którym te zmiany zaszły, czyli:
𝜀 = (∆𝜔
∆𝑡)∆𝑡→0
W ruchu po okręgu przyspieszenie kątowe jest równe przyspieszeniu stycznemu,
czyli:
𝑎 = 𝜀𝑅
4. Przyspieszenie dośrodkowe.
W ruchu po okręgu przyspieszenie normalne jest nazywane przyspieszeniem
dośrodkowym i jest zawsze skierowane do środka okręgu, a jego wartość jest równa:
𝑎𝑑 = 𝑎𝑛 =𝑣2
𝑅= 𝜔2𝑅
Całkowite przyspieszenie w ruchu po okręgu wyraża się wzorem:
𝑎 = √𝑎 2 + 𝑎𝑛
2 = 𝑅√𝜔4 + 𝜀2
5. Ruch jednostajny po okręgu.
Jeżeli prędkość liniowa i kątowa pozostają stałe w ruchu po okręgu, to taki ruch
nazywamy ruchem jednostajnym po okręgu.

28
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
W ruchu jednostajnym po okręgu przyspieszenie styczne jest równe zero, natomiast
całkowite przyspieszenie jest równe przyspieszeniu dośrodkowemu.
Ruch po okręgu opisują takie wielkości jak częstotliwość obiegu i okres ruchu.
Okresem ruchu nazywamy czas, po którym ciało zakreśliło pełny okrąg, czyli:
𝑇 =2𝜋
𝜔
Częstotliwością obiegu nazywamy ilość pełnych obiegów po okręgu w jednostce
czasu, czyli:
𝑓 =1
𝑇
6. Ruch jednostajnie zmienny po okręgu.
Jeżeli przyspieszenie kątowe jest stałe w ruchu po okręgu, to taki ruch nazywamy
ruchem jednostajnie zmiennym po okręgu.
Jeżeli przyspieszenie kątowe jest dodatnie, to mówimy o ruchu jednostajnie
przyspieszonym po okręgu.
Jeżeli przyspieszenie kątowe jest ujemne, to mówimy o ruchu jednostajnie
opóźnionym po okręgu.
7. Siła dośrodkowa w ruchu po okręgu.
Każdą siłę działającą na ciało i powodującą jego ruch po okręgu nazywamy siłą
dośrodkową, gdyż jest skierowana do środka okręgu i powoduje powstawanie
przyśpieszenia dośrodkowego. Siła dośrodkowa wyraża się wzorem:
𝐹𝑑 = 𝑚𝑎𝑑 =𝑚𝑣2
𝑅= 𝑚𝜔2𝑅

29
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Siły dośrodkowej używamy wtedy, gdy ruch ciała opisujemy w inercjalnym układzie
odniesienia (nieporuszającym się).
8. Siła odśrodkowa bezwładności.
Siła odśrodkowa bezwładności jest siłą pozorną, której przyczyną jest przyspieszenie
układu odniesienia.
Wartość siły odśrodkowej jest taka sama jak wartość siły dośrodkowej, tylko ma
przeciwny zwrot.
𝐹𝑜𝑑 = −𝐹𝑑
𝐹𝑜𝑑 =𝑚𝑣2
𝑅= 𝑚𝜔2𝑅
Siły odśrodkowej używamy wtedy, gdy ruch ciała opisujemy w nieinercjalnym
układzie odniesienia (poruszającym się).
ZADANIA
1. Punkt materialny porusza się po okręgu o promieniu cm20R ze stałym, co do
wartości przyspieszeniem stycznym 2
s scm5a . Po jakim czasie t1 od chwili
rozpoczęcia ruchu przyspieszenie dośrodkowe ad będzie, co do wartości trzy razy
większe od przyspieszenia stycznego?[3]
2. Tarcza szlifierska wykonuje 8000 obrotów na minutę. Oblicz prędkość liniową
obrzeża tarczy szlifierskiej o średnicy 40cm.
3. Karuzela wykonuje w ciągu minuty 30n obrotów. Oblicz, jaką prędkość kątową,
liniową i przyspieszenie dośrodkowe ma człowiek, który siedzi na karuzeli. Promień
toru, po którym porusza się człowiek, wynosi m4R .
4. Oblicz przyspieszenie dośrodkowe ciała znajdującego się na równiku Ziemi. Porównaj
je z przyspieszeniem spadku swobodnego 2sm8,9g . Przyjmij, że promień
równikowy Ziemi wynosi 6380 km, a okres jej obrotu 24 h.

30
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
5. Z jaką częstotliwością obracają się koła samochodu o średnicy 60cm jadącego z
prędkością hkm80v ?
6. Minutowa wskazówka zegara jest 5,1n razy dłuższa od wskazówki godzinowej.
a) Ile razy większa jest prędkość liniowa końca wskazówki minutowej od prędkości
liniowej końca wskazówki godzinowej?
b) Oblicz stosunek przyspieszeń dośrodkowych końców obu wskazówek.
7. Kolarz rozpoczynając jazdę pierwsze s30t jedzie ruchem jednostajnie
przyspieszonym. Jaką prędkość osiąga po tym czasie, jeżeli promień kół rowerowych
m35,0r , a przyspieszenie kątowe tych kół 2srad5,0 ?[3]
8. Motocyklista startuje do wyścigu rozgrywanego na torze kołowym o promieniu
m90R . W ciągu czasu s10t wartość jego prędkości wzrasta jednostajnie od 0
do hkm72v . Jaka była wartość przyspieszenia stycznego (liniowego) i kątowego
motocyklisty? Oblicz przyspieszenie dośrodkowe motocykla w chwili s180 t . Jaki
kąt tworzył w tym momencie wektor przyspieszenia wypadkowego ze styczną do
toru?[3]
9. Samochód mając prędkość hkm120v zaczyna hamować bez poślizgu poruszając
się przy tym ruchem jednostajnie opóźnionym. Do całkowitego zatrzymania się
przebył on drogę m60s . Wiedząc, że promień kół samochodu wynosi cm30R
znajdź opóźnienie kątowe kół podczas hamowania.
10. Znaleźć maksymalną prędkość, z jaką samochód może poruszać się po zakręcie
asfaltowej drogi o promieniu krzywizny 𝑅 = 120𝑚. Efektywny współczynnik tarcia
między oponami samochodu a asfaltem wynosi 𝑓 = 0,5, a przyspieszenie ziemskie
jest równe 𝑔 = 9,8
2.
11. Oblicz promień toru kołowego, po którym jedzie rowerzysta ze stałą prędkością
równą 𝑣 = 12
. Kąt nachylenia roweru do poziomu wynosi 𝛼 = 60°. Oblicz siłę
odśrodkową działającą na rowerzystę, jeżeli jego masa wynosi 𝑚 = 80𝑘𝑔.
12. Ciężarek zawieszony na nici o długości 𝑙 = 15𝑐𝑚 obraca się po okręgu ruchem
jednostajnym w płaszczyźnie poziomej. Podczas ruchu nic odchyla się od pionu o kąt
𝛼 = 60°. Znajdź prędkość ciężarka oraz jego okres obrotu i częstotliwość.
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA

31
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
13. Promień kuli ziemskiej wynosi około 6370km. Z jaka prędkością porusza sie punkt na
powierzchni Ziemi wokół własnej osi?
14. Oblicz promień okręgu zakreślonego przez ciało poruszające sie z prędkością 36
km/h, jeżeli czas przebycia pełnego okrążenia wynosi 4π s?
15. Oblicz promień koła zamachowego maszyny parowej, jeżeli punkty położone na
obwodzie tego koła poruszają się z szybkością 𝑣1 = 6
. Natomiast punkty położone
o 15 cm bliżej środka koła poruszają się z szybkością 𝑣1 = 4
,.
16. W ciągu czasu t = 15s liczba obrotów koła napędowego zwiększyła sie od 𝑛1 =
150𝑜𝑏𝑟
𝑛 do 𝑛1 = 250
𝑜𝑏𝑟
𝑛. Obliczyc przyśpieszenie kątowe tego koła.
17. Krzesełko karuzeli porusza sie po okręgu ze stałą wartością prędkości równą 10 m/s ,
a czas jednego obrotu karuzeli wynosi 8 s. Jaka jest długość promienia okręgu, po
którym porusza sie krzesło karuzeli?
18. Przyspieszenie dośrodkowe ciała zataczającego okrąg o promieniu 14cm wynosi
𝑎 = 4
2. Jaki jest okres tego ruchu?
19. Płyta gramofonowa obraca sie z częstotliwością 35 obrotów na minutę. Promień tej
płyty wynosi 9 cm. Ile wynosi wartość prędkości, z jaka porusza sie igła gramofonu
względem punktu na jej brzegu? Oblicz przyśpieszenie kątowe.
20. Tarcza gramofonu obraca sie 45 razy w ciągu 1 minuty. Ile wynosi w okres obrotu tej
tarczy i jaka jest jej częstotliwość w Herzach?
21. Oblicz promień toru kołowego, po którym jedzie rowerzysta ze stałą prędkością
równą 𝑣 = 14
. Kąt nachylenia roweru do poziomu wynosi 𝛼 = 45°. Oblicz siłę
odśrodkową działającą na rowerzystę, jeżeli jego masa wynosi 𝑚 = 90𝑘𝑔.

32
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego X
𝑣
𝑣 = [𝑣𝑥, 𝑣𝑦]
𝑣 𝑥
𝑣 𝑦
𝑎 𝑛
𝑎 = [0,−𝑔]
𝑎
𝑣 0 = [𝑣0, 0]
𝑌
𝐻
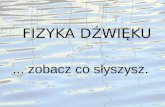
RUCH DWUWYMIAROWY
1. Rzut poziomy.

33
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Opis rzutu poziomego:
Ciało porusza się złożeniem dwóch ruchów: jednostajnie zmiennego wzdłuż
osi Y ze stałym przyspieszeniem ziemskim g i jednostajnie zmiennego wzdłuż
osi X ze stałą prędkością v0.
Całkowite przyspieszenie w tym rzucie jest równe sumie przyspieszenia
stycznego i normalnego: 𝑎 = 𝑎 + 𝑎𝑛 = 𝑔 , czyli 𝑔 = √𝑎 2 + 𝑎𝑛
2 .
Ciało porusza się po torze, którym jest parabola o wierzchołku w H skierowana
ramionami w dół.
Komplet równań opisujący ruch poziomy wzdłuż osi OX i OY:
𝑥 = 𝑣0𝑡
𝑣𝑥 = 𝑣0
𝑦 = 𝐻 −𝑔𝑡2
2
𝑣𝑦 = −𝑔𝑡
𝑎𝑦 = −𝑔
Zasięg rzutu jest równy:
𝑧 = 𝑣0√2𝐻
𝑔
Całkowity czas trwania rzutu wynosi:
𝑡 = √2𝐻
𝑔
Prędkość końcowa (w momencie uderzenia w ziemię) ciała jest równa:
𝑣 = √𝑣02 + 2𝑔𝐻

34
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Prędkość w dowolnej chwili wynosi:
𝑣 = √𝑣02 + (𝑔𝑡)2
2. Rzut ukośny.
Opis rzutu ukośnego:
Ciało zostało wyrzucone z prędkością v0 pod kątem α do poziomu.
Ciało porusza się złożeniem dwóch ruchów: jednostajnie zmiennego wzdłuż
osi Y i jednostajnego wzdłuż osi X.
Całkowite przyspieszenie w tym rzucie jest równe przyspieszeniu ziemskiemu.
Ciało porusza się po torze, którym jest parabola o wierzchołku w punkcie
𝑥 =1
2𝑧 i 𝑦 = 𝐻 𝑎𝑥 skierowana ramionami w dół.
Komplet równań opisujący ruch ukośny wzdłuż osi OX i OY:
𝛼
𝑎 = 𝑔 = [0,−𝑔]
𝑣 = [𝑣𝑥, 𝑣𝑦]
Y
X
𝐻 𝑎𝑥
𝑣 0 𝑣 0𝑦
𝑣 0𝑥 0

35
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
𝑥 = 𝑣0𝑡𝑐𝑜𝑠 𝛼
𝑣𝑥 = 𝑣0 cos 𝛼
𝑦 = 𝑣0𝑡𝑠𝑖𝑛𝛼 −𝑔𝑡2
2
𝑣𝑦 = 𝑣0 sin𝛼 − 𝑔𝑡
𝑎𝑦 = −𝑔
Zasięg rzutu jest równy:
𝑧 =𝑣0
2𝑠𝑖𝑛2𝛼
𝑔
Całkowity czas trwania rzutu wynosi:
𝑡 =2𝑣0𝑠𝑖𝑛𝛼
𝑔
Maksymalna wysokość na jaka wzniesie się ciało jest równa:
𝐻 𝑎𝑥 =𝑣02 sin2 𝛼
2𝑔
Prędkość w dowolnej chwili wynosi:
𝑣 = √𝑣𝑥2 + 𝑣𝑦
2
ZADANIA
1. Z wierzchołka wieży wyrzucono ciało w kierunku poziomym z prędkością
sm18v0 . Znaleźć przyspieszenie styczne i normalne do toru, po czasie s5t od
chwili wyrzucenia. Przyjmujemy przyspieszenie ziemskie równe 2sm8,9g .

36
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
2. Piłkę rzucono pod kątem α do poziomu nadając jej prędkość początkową sm10v0 .
a) Wykonaj rysunek.
b) Oblicz składowe wektora prędkości w najwyższym punkcie toru.
c) Oblicz składowe wektora przyspieszenia.
d) Oblicz czas trwania ruchu i zasięg rzutu.
Przyjmij wartość przyspieszenia ziemskiego 2sm10g .
3. Z armaty wystrzelono pocisk pod kątem 45 do poziomu z prędkością
początkową sm150v0 . Znajdź współrzędne położenia ciała oraz współrzędne
prędkości po czasie równym ¾ całkowitego czas trwania rzutu. Przyjmij
przyspieszenie ziemskie 2sm8,9g .
4. Pod jakim kątem do poziomu należy wyrzucić ciało, jeżeli wiadomo, że maksymalna
wysokość, na jaką wzniosło się ciało, jest trzy razy mniejsza od zasięgu rzutu? Opory
powietrza zaniedbujemy.
5. Pocisk został wystrzelony poziomo z karabinu umieszczonego na wieży o wysokości
44m z prędkością 𝑣0 = 240𝑚 𝑠⁄ . Oblicz ile czasu będzie trwał lot tego pocisku w
powietrzu oraz w jakiej odległości poziomej uderzy w ziemię. Ile wynosi składowa
pionowa jego prędkości w momencie uderzenia w ziemię.
6. Z dachu budynku rzucono poziomo kamień z prędkością 𝑣0 = 20𝑚 𝑠⁄ . Oblicz
składową przyspieszenia kamienia prostopadłą do toru po czasie 𝑡 = 3𝑠 oraz prędkość
z jaka kamień uderzy w ziemię.
7. Z wierzchołka góry wyrzucono ciało w kierunku poziomym z prędkością sm25v0 .
Znaleźć składowe wektora przyspieszenia, styczną i normalną do toru, po czasie
s5t od chwili wyrzucenia. Przyjmij 2sm8,9g .[3]
8. Kula pistoletowa wystrzelona poziomo przebiła dwie pionowo ustawione kartki
papieru, umieszczone w odległościach m201 l i m302 l od pistoletu. Różnica
wysokości, na jakich znajdują się otwory w kartkach wynosi h = 5cm. Oblicz
prędkość początkową kuli. Przyspieszenie ziemskie 2sm10g .[3]
9. W którym punkcie toru w rzucie ukośnym energia kinetyczna jest najmniejsza?
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA

37
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
10. Kominiarz z dachu wieżowca wyrzucił piłkę w kierunku poziomym z prędkością
sm5v0 . Znaleźć przyspieszenie styczne i normalne do toru, po czasie s3t od
chwili wyrzucenia. Przyjmujemy przyspieszenie ziemskie równe 2sm8,9g .
11. W którym punkcie toru w rzucie poziomym energia kinetyczna będzie dwa razy
większa od energii potencjalnej?
12. Pocisk wystrzelono pod kątem α do poziomu nadając mu prędkość początkową
sm200v0 .
a) Wykonaj rysunek przedstawiający tor pocisku.
b) Oblicz składowe wektora prędkości w najwyższym punkcie toru.
c) Oblicz składowe wektora przyspieszenia.
d) Oblicz czas trwania ruchu i zasięg rzutu.
Przyjmij wartość przyspieszenia ziemskiego 2sm10g .
13. Ciało rzucono pod kątem 45 do poziomu z prędkością początkową sm15v0 .
Znajdź współrzędne położenia ciała oraz współrzędne prędkości po czasie równym
2/5 całkowitego czas trwania rzutu. Przyjmij przyspieszenie ziemskie 2sm8,9g .
14. Pod jakim kątem do poziomu należy wyrzucić piłkę, aby spadła ona w odległości 4m
po czasie 6s. Z jaką prędkością należy wyrzucić tą piłkę?
15. Mama rzuciła Jasiowi z balkonu znajdującego się na wysokości 50m klucze poziomo z
prędkością 𝑣0 = 2𝑚 𝑠⁄ . Oblicz ile czasu będą klucze leciały w powietrzu oraz w
jakiej odległości poziomej musi stać Jasiu, aby złapać klucze tuż przed uderzeniem w
ziemię. Ile wynosi składowa pionowa ich prędkości w momencie uderzenia w ziemię.
16. Jaką energię kinetyczną musi posiadać ciało, aby wyrzucone pod kątem 45 doleciało na odległość 50m?
ŚRODEK MASY, ZASADA ZACHOWANIA PĘDU I ENERGII
1. Środek masy.

38
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Danych jest n punktów materialnych o masach 𝑚1, 𝑚1,⋯ ,𝑚𝑛 leżących na linii
prostej. Położenie środka masy układu tych punktów materialnych względem
pewnego punktu odniesienia wyraża się wzorem:
𝑥 =∑ 𝑚 𝑥
𝑛 =1
∑ 𝑚 𝑛 =1
=𝑚1𝑥1 +𝑚2𝑥2 +⋯+𝑚𝑛𝑥𝑛
𝑚1 +𝑚2 +⋯+𝑚𝑛
Gdzie:𝑥1, 𝑥2,⋯, 𝑥𝑛 są odległościami punktów materialnych o masach odpowiednio równych
𝑚1, 𝑚1, ⋯ ,𝑚𝑛 od punktu odniesienia względem którego jest liczone położenie środka
masy.
Dla punktów leżących na płaszczyźnie XY środek masy możemy zdefiniować
następująco:
𝑥 =∑ 𝑚 𝑥
𝑛 =1
∑ 𝑚 𝑛 =1
=𝑚1𝑥1 +𝑚2𝑥2 +⋯+𝑚𝑛𝑥𝑛
𝑚1 +𝑚2 +⋯+𝑚𝑛
𝑦 =∑ 𝑚 𝑦
𝑛 =1
∑ 𝑚 𝑛 =1
=𝑚1𝑦1 +𝑚2𝑦2 +⋯+𝑚𝑛𝑦𝑛
𝑚1 +𝑚2 +⋯+𝑚𝑛
Dla punktów leżących w przestrzeni XYZ środek masy definiujemy analogicznie
podając 𝑥𝑠, 𝑦𝑠, 𝑧𝑠.
2. Definicja pędu ciała.
Iloczyn masy ciała i jego prędkości nazywamy pędem ciała, czyli:
𝑝 = 𝑚𝑣
Pęd jest wielkością wektorową i nie ma swojej jednostki. Jednostką pędu jest 1𝑘𝑔 ∙
.
3. Zasada zachowania pędu.
Zasada zachowania pędu:

39
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Jeśli na układ ciał nie działają siły pochodzące od ciał spoza układu , czyli siły
zewnętrzne lub siły te równoważą się, to pęd układu pozostaje stały.
Siły działające pomiędzy ciałami układu, czyli siły wewnętrzne mogą zmieniać pędy
poszczególnych ciał, ale to nie zmienia pędu układu.
𝑝 = 𝑐𝑜𝑛𝑠𝑡
4. Energia kinetyczna.
Ciało posiada energię mechaniczną, jeżeli jest zdolne do wykonania pracy.
Energie mechaniczną dzielimy na kinetyczną i potencjalną.
Ciało o masie m poruszające się z prędkością v posiada energię kinetyczną równą:
𝐸𝐾 =𝑚𝑣2
2
Każde poruszające się ciało posiada energię kinetyczną!
5. Energia potencjalna ciężkości.
Ciało o masie m znajdujące się na wysokości h posiada energię potencjalną ciężkości
równą:
𝐸𝑝 = 𝑚𝑔ℎ
Każde ciało znajdujące się na wysokości posiada energie potencjalna ciężkości
względem poziomu!
Jednostką energii jest 1J (dżul).
6. Zasada zachowania energii mechanicznej.

40
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Energia mechaniczna układu ciał nie zmienia się, gdy siły zewnętrzne nie wykonują
pracy nad tym układem.
Jeśli na ciało nie działają siły zmieniające jego energię wewnętrzną, to jego
całkowita energia mechaniczna jest stała, co można zapisać wzorem:
𝐸 = 𝐸𝐾 + 𝐸𝑝 = 𝑐𝑜𝑛𝑠𝑡
ZADANIA
1. Znajdź środek masy układu trzech punktów o masach 𝑚1 = 3𝑘𝑔, 𝑚2 = 5𝑘𝑔,
𝑚3 = 8𝑘𝑔 leżących na jednej prostej w odległościach 𝑥1 = 3𝑚, 𝑥2 = 1,6𝑚 , 𝑥3 =
6𝑚 od punktu odniesienia.
2. Znajdź współrzędne środka masy układu trzech cząstek o masach 𝑚1 = 0,5𝑘𝑔,
𝑚2 = 2𝑘𝑔, 𝑚3 = 4𝑘𝑔 umieszczonych w wierzchołkach trójkąta równobocznego o
boku 𝑎 = 2𝑚.
3. Wózek o masie 𝑚1 = 100𝑘𝑔 poruszający się z prędkością 𝑣1 = 𝑚/𝑠 zderza się
niesprężyście z poruszającym się wózkiem o masie 𝑚2 = 0𝑘𝑔. Po zderzeniu oba
wózki poruszają się dalej z prędkością 𝑣3 = 3𝑚/𝑠. Oblicz ile wynosiła prędkość
drugiego wózka?
4. Wagonik o masie 𝑚1 = 90𝑘𝑔 poruszający się po torze z prędkością 𝑣1 = 10𝑚/𝑠
zderza się niesprężyście z nieporuszającym się wagonikiem o masie 𝑚2 = 60𝑘𝑔. Po
zderzeniu oba wagoniki poruszają się dalej zgodnie ze zwrotem prędkości pierwszego
wagonika. Oblicz ile wynosi ich prędkość?
5. Z jaką prędkością po wystrzale odskoczy do tyłu działo o masie 𝑚1 = 300𝑘𝑔, jeżeli
masa wystrzelonego z prędkością 𝑣2 = 600𝑚/𝑠 pocisku wynosi 𝑚2 = 0,04𝑘𝑔?
6. Po równi pochyłej o wysokości ℎ = 1,5𝑚 i długości zbocza 𝑙 = 10𝑚 ześlizguje się
ciało o masie 𝑚 = 1𝑘𝑔. Znaleźć prędkość i energię kinetyczną ciała u podnóża równi.
Współczynnik tarcia 𝜇 = 0,05.
7. Korzystając z zasady zachowania energii oblicz, jaką prędkość końcową uzyska ciało
zsuwające się z równi pochyłej o wysokości h i kącie nachylenia α, jeżeli
współczynnik tarcia wynosi 𝜇.

41
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
8. Oblicz jaki pęd posiada ciało o masie 𝑚 = 3𝑘𝑔 spadające swobodnie z wysokości
ℎ = 10𝑚 gdy znajduje się w połowie wysokości h? Oblicz czas spadania tego ciała.
9. Oblicz stosunek energii kinetycznej klocka ześlizgującego się z równi pochyłej o kącie
nachylenia 𝛼 i współczynniku tarcia 𝜇 = 8/9 ∙ 𝑡𝑔𝛼, do energii kinetycznej tego
samego klocka ześlizgującego się z tej samej ale doskonale gładkiej równi?
10. Na jaką maksymalną wysokość wzniesie się ciało rzucone do góry z prędkością
𝑣 = 20𝑚/𝑠? Skorzystaj z zasady zachowania energii.
11. Ciało spada swobodnie z wysokości H. Oblicz stosunek energii kinetycznej do
potencjalnej tego ciała wysokości H/2 oraz H/4 licząc od poziomu Ziemi.
12. Z karabinu o masie 𝑚1 = 5𝑘𝑔, wystrzelono pocisk o masie 𝑚2 = 0,01𝑘𝑔. Po
wystrzale karabin odskoczył do tyłu z prędkością 𝑣1 = 1,5𝑚/𝑠. Oblicz z jaka
prędkością wystrzelono pocisk?
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA
13. Znajdź środek masy układu trzech punktów o masach 𝑚1 = 10𝑘𝑔, 𝑚2 = 15𝑘𝑔,
𝑚3 = 14𝑘𝑔 leżących na jednej prostej w odległościach 𝑥1 = 4,5𝑚, 𝑥2 = 6𝑚 ,
𝑥3 = 10,8𝑚 od punktu odniesienia.
14. Znajdź współrzędne środka masy układu czterech cząstek o masach 𝑚1 = 2,5𝑘𝑔,
𝑚2 = 1,6𝑘𝑔, 𝑚3 = 1𝑘𝑔, 𝑚4 = 2𝑘𝑔 umieszczonych w wierzchołkach kwadratu o
boku 𝑎 = 5𝑚.
15. Balon znajdujący się na wysokości ℎ nad powierzchnią ziemi rzucono pionowo do
góry z prędkością 𝑣0 = 5𝑚/𝑠. Prędkość końcowa ciała (tuż przed upadkiem)
wyniosła 𝑣 = 4𝑣0. Wyznaczyć ℎ. Na jaką maksymalną wysokość 𝐻 nad
powierzchnią ziemi wzniesie się balon? Skorzystać z zasady zachowania energii.
16. Oblicz średnią moc silnika samochodu o masie 𝑚 = 1200𝑘𝑔, który poruszając się
ruchem jednostajnie zmiennym w ciągu czasu 𝑡 = 10𝑠 uzyskał prędkość równą
𝑣 = 60𝑘𝑚/ℎ. Współczynnika tarcia opon samochodu o asfalt wynosi 𝜇 = 0,02.

42
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
17. Człowiek o masie 𝑚1 = 90𝑘𝑔 biegnący z prędkością 𝑣1 = 2𝑚/𝑠 dogania wózek o
masie 𝑚2 = 120𝑘𝑔 jadący z prędkością 𝑣2 = 1,5𝑚/𝑠 i wskakuje na ten wózek. Z
jaką prędkością będzie poruszał się teraz wózek? Jaka będzie prędkość wózka z
człowiekiem jeżeli człowiek będzie biegł naprzeciw wózka?
18. Korzystając z zasady zachowania energii oblicz, jaką prędkość końcową będzie miało
ciało zsuwające się z równi pochyłej o wysokości h i kącie nachylenia α, jeżeli nie
będzie tarcia. Jak zmieni się ta prędkość, jeżeli współczynnik tarcia będzie wynosił 𝜇?
19. Jaką pracę należy wykonać, aby wciągnąć pień drzewa o masie 𝑚 = 100𝑘𝑔 na zbocze
o długości 5m i kacie nachylenia do poziomu 𝛼 = 60°, jeżeli współczynnik tarcia
wynosi 𝜇 = 0,4?
20. Pocisk o masie 𝑚 = 0,3𝑘𝑔 poruszający się z prędkością 𝑣1 = 800𝑚/𝑠 przebija deskę
o grubości 𝑑 = 4𝑐𝑚 i jego prędkość maleje do wartości 𝑣2 = 600 𝑚/𝑠. Oblicz straty
energii dla tego pocisku. Wynik podaj w procentach.

43
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
ZASADY DYNAMIKI NEWTONA, TARCIE, PRACA
1. Zasady dynamiki Newtona:
W mechanice klasycznej wyróżniamy trzy zasady dynamiki Newtona.
I zasada dynamiki Newtona
Jeżeli na ciało nie działają żadne siły lub działające siły się równoważą (czyli siła wypadkowa
ma wartość zero), to ciało pozostaje w spoczynku lub porusza się ruchem jednostajnym
prostoliniowym.
II zasada dynamiki Newtona
Jeżeli działają na ciało siły nie równoważą się (czyli siła wypadkowa nie ma wartości zero), to
ciało porusza się ruchem zmiennym z przyśpieszeniem, którego wartość jest wprost
proporcjonalna do wartości siły wypadkowej 𝐹 𝑤 i odwrotnie proporcjonalna do masy ciała.
Kierunek i zwrot przyspieszenia jest zgodny z kierunkiem i zwrotem siły wypadkowej.
𝑎 =𝐹 𝑤𝑚
III zasada dynamiki Newtona
Jeżeli ciało A działa na ciało B siłą akcji 𝐹𝐴𝐵 , to ciało B działa na ciało A siłą reakcji 𝐹𝐵𝐴

44
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
równą co do wartości lecz o przeciwnym kierunku:
𝐹𝐴𝐵 = −𝐹𝐵𝐴
2. Rozkład sił na równi pochyłej.
Wartość siły zsuwającej jest równa:
𝐹𝑍 = 𝑄 sin𝛼 = 𝑚𝑔 sin𝛼
Wartość siły nacisku jest równa:
𝐹𝑁 = 𝑄 cos𝛼 = 𝑚𝑔 cos𝛼
Wartość siły tarcia jest równa:
𝑇 = 𝑓𝐹𝑁 = 𝑓𝑄 cos𝛼 = 𝑓𝑚𝑔 cos𝛼
3. Tarcie i rodzaje tarcia.
𝛼
𝑚
𝐹
𝐹𝑧
𝑄
𝑇
𝐹𝑁

45
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Na każde ciało działa siła tarcia. Wynika to z chropowatości otaczającej nas
rzeczywistości. Ciało na oko gładkie jest także chropowate. Jeżeli takie dwa
chropowate ciała stykają się ze sobą, to wówczas chropowatości zaczepiają się o
siebie i powoduje to powstawanie tarcia.
Siłę tarcia działającą na ciało spoczywające nazywamy siłą tarcia statycznego lub
spoczynkowego. Może ona przyjmować wartości od zera do wartości maksymalnej
równej Tmax.
Współczynnikiem tarcia statycznego nazywamy iloraz maksymalnej siły tarcia Tmax
statycznego do siły nacisku N, czyli:
𝑓𝑆 =𝑇 𝑎𝑥
𝑁
Gdy ciało zaczyna się poruszać siła tarcia gwałtownie maleje i przyjmuje stałą
wartość, którą nazywamy siłą tarcia kinetycznego 𝑇𝐾 .
Współczynnikiem tarcia kinetycznego nazywamy iloraz siły tarcia kinetycznego TK
do siły nacisku N, czyli:
𝑓𝐾 =𝑇𝐾𝑁
Oczywiście współczynnik tarcia kinetycznego jest mniejszy od współczynnika tarcia
statycznego.
4. Praca i moc.
Pracą nazywamy iloczyn współrzędnej siły działającej w kierunku przemieszczenia
i współrzędnej przemieszczenia, czyli:
𝑊 = 𝐹∆𝑟 cos𝛼

46
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Praca jest wielkością skalarną (iloczynem skalarnym wektora siły i przesunięcia).
Jednostką pracy jest 1J (dżul).
Mocą średnią nazywamy szybkość wykonywania pracy, czyli:
𝑃 =𝑊
𝑡
Jednostką mocy jest 1W (Watt).
ZADANIA
1. Z jakim przyspieszeniem będzie poruszał się układ dwóch ciał o masach 𝑚1 = 6𝑘𝑔 i
𝑚2 = 3𝑘𝑔 połączonych nieważką nicią, jeżeli ciało o masie 𝑚1 znajduje się na stole o
współczynniku tarcia 𝜇 = 0,1, a ciało o masie 𝑚2 zwisa poza stołem?
2. Po równi pochyłej o wysokości ℎ = 1,5𝑚 i długości zbocza 𝑙 = 15𝑚 ześlizguje się
ciało o masie 𝑚 = 1,5𝑘𝑔. Znaleźć prędkość tego ciała u podnóża równi, jeżeli
wiadomo, że współczynnik tarcia wynosi 𝜇 = 0,05.
3. Jaką drogę przebędzie dziewczynka poruszająca się na rolkach do momentu
zatrzymania się, jeżeli porusza się z prędkością 𝑣0 = 5𝑚/𝑠, a współczynnik tarcia
kółek rolek o podłoże wynosi 𝜇 = 0,02?
4. Oblicz przyspieszenie z jakim zsuwał się będzie klocek z równi pochyłej o kącie
nachylenia 𝛼 = 45°. Współczynnik tarcia 𝜇 = 0,32.
5. Dane są dwie nierówne masy połączone ze sobą za pomocą linki przerzuconej przez
gładki nieważki blok. Niech masa 𝑚1 będzie większa od masy 𝑚2. Znaleźć
naprężenie linki i przyspieszenie obu mas.
6. Oblicz opóźnienie, z jakim klocek, poruszający się z pewną prędkością 𝑣0, poruszał
się będzie w górę równi pochyłej o kącie nachylenia 𝛼 = 45°. Współczynnik tarcia
𝜇 = 0,14.
7. Ile razy dłużej ześlizguje się sześcienny klocek wykonany z drewna ze zbocza o kącie
nachylenia 𝛼 i współczynniku tarcia 𝜇, niż z tego samego zbocza ale o dwa razy
mniejszym współczynniku tarcia?

47
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
8. Mateusz pcha komodę o ciężarze 2 0𝑁 po poziomej podłodze, siłą skierowaną w dół
pod kątem 45° do poziomu, przesuwając ją ze stałą prędkością na odległość 4𝑚. Jaką
pracę wykonuje przy tym, jeżeli współczynnik tarcia kinetycznego wynosi 𝜇 = 0,2.
9. Oblicz, jaką pracę należy wykonać, aby zatrzymać ciało poruszające się ruchem
jednostajnie przyspieszonym bez tarcia z prędkością początkową równą 𝑣0 = 8𝑚/𝑠.
Masa tego ciała wynosi 2𝑘𝑔.
10. Karol ciągnie sanki o masie 4𝑘𝑔 ze stałą szybkością, po poziomej powierzchni na
drodze 𝑚. Sznurek od sanek tworzy kąt 30° z poziomem. Jaką pracę wykona Karol
przy ciągnięciu, jeśli współczynnik tarcia kinetycznego wynosi 0,2.
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA
11. Dwie masy 𝑚1 = 1𝑘𝑔 i 𝑚2 = 2,5𝑘𝑔 połączone są ze sobą za pomocą linki
przerzuconej przez gładki nieważki krążek. Znaleźć naprężenia linki i przyspieszenia
obu mas.
12. Oblicz prędkość jaką osiągnie zsuwający się klocek o masie 𝑚 = 0,8𝑘𝑔 u podnóża
zbocza o kącie nachylenia 𝛼 = 30°. Współczynnik tarcia 𝜇 = 0,2. Oblicz ile wynosi
czas zsuwania się tego klocka z tego zbocza.
13. Oblicz przyspieszenie z jakim będzie poruszał się układ ciał o masach 𝑚1 = 8𝑘𝑔,
𝑚2 = 3𝑘𝑔, 𝑚3 = 1𝑘𝑔 połączonych nieważką nicią, jeżeli ciało o masie 𝑚1 znajduje
się na stole o współczynniku tarcia 𝜇 = 0,2, a ciała o masach 𝑚2 i 𝑚3 zwisają poza
stołem? Oblicz siłę naciągu nici.
14. Oblicz opóźnienie, z jakim klocek, któremu nadano pewną prędkość, poruszał się
będzie w górę równi pochyłej o kącie nachylenia 𝛼 = 30°. Współczynnik tarcia
𝜇 = 0,1.[5]
15. Jaką drogę przebędzie pojazd do momentu zatrzymania się, jeżeli porusza się z
prędkością 𝑣0 = 40𝑚/𝑠, a współczynnik tarcia opon o asfalt wynosi 𝜇 = 0,1?
16. Jak długo ześlizguje się klocek o masie m z równi pochyłej o kącie nachylenia 𝛼 i
współczynniku tarcia 𝜇?
17. Marcin pcha biurko o ciężarze 200𝑁 po poziomej podłodze, siłą skierowaną w dół
pod kątem 30° do poziomu, przesuwając go ze stałą prędkością na odległość 2𝑚. Jaką
pracę wykonuje on przy tym, jeżeli współczynnik tarcia kinetycznego wynosi 𝜇 = 0,1.

48
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
18. Adam ciągnie sanki o masie 5𝑘𝑔 ze stałą szybkością, po poziomej powierzchni na
drodze 10𝑚. Jaką pracę wykona on pry ciągnięciu, jeśli współczynnik tarcia
kinetycznego wynosi 0,1, a sznurek tworzy kąt 45° z poziomem. Jak zmieni się ta
praca jeśli na sanki posadzimy dziecko o masie 20kg?
ELEKTROSTATYKA
1. Prawo Coulomba i cechy pola elektrostatycznego.
Wartość siły wzajemnego oddziaływania dwóch ładunków punktowych lub równomiernie
naelektryzowanych kulek jest wprost proporcjonalna do iloczynu wartości ich ładunków i
odwrotnie proporcjonalna do kwadratu odległości między ich środkami.
Zapisując tą zasadę wzorem mamy:
𝐹𝑒 =𝑘|𝑞1𝑞2|
𝑟2
gdzie: k – współczynnik proporcjonalności równy 𝑘 =1
4𝜋𝜀0= 9 ∙ 109𝑁𝑚2 𝐶2⁄
q1 – wartość pierwszego ładunku
q2 – wartość drugiego ładunku
r – odległość między ładunkami
Pole, w który ma umieszczone naelektryzowane ciała w dowolnym punkcie działa siła
elektryczna nazywamy polem elektrostatycznym.
Proste, wzdłuż których działa siła elektryczna na ładunek próbny q nazywamy liniami
pola elektrostatycznego.

49
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Cechy pola elektrostatycznego:
a) Pole elektrostatyczne jest polem centralnym. Linie pola przecinają się w jednym
punkcie.
b) Pole elektrostatyczne jest polem jednorodnym, czyli polem, którego natężenie jest
takie samo w każdym punkcie przestrzeni. Linie tego pola są równoległe.
c) Pole elektrostatyczne jest polem zachowawczym, czyli polem w którym praca siły
zewnętrznej równoważącej siłę pola zależy tylko od położenia początkowego i
końcowego ciała przesuwanego w tym polu.
2. Natężenie pola elektrostatycznego.
Natężeniem pola elektrostatycznego w danym punkcie nazywamy stosunek siły
działającej na umieszczony w tym punkcie próbny ładunek do tego wartości tego
ładunku.
Możemy to zapisać wzorem:
=𝐹𝑒
𝑞
Natomiast wartość natężenia centralnego pola elektrostatycznego jest wprost
proporcjonalna do ładunku źródła pola i odwrotnie proporcjonalna do kwadratu
odległości punktu, w którym badamy pole, od środka źródła pola, czyli:
𝐸 =𝑘|𝑄|𝑞𝑟2
𝑞=
|𝑄|
𝑟2
3. Praca w polu elektrostatycznym.
Aby przemieścić ciało naładowane ładunkiem q miedzy punktami A i B w polu
elektrostatycznym musimy zadziałać na nie siłą Fz, która musi zrównoważyć siłę
elektryczną działającą w tym polu. Wartość tej siły jest taka sama jak siły Coulomba,
tylko działa w przeciwnym kierunku.
Pracę siły zewnętrznej równoważącej siłę Coulomba definiujemy następująco:

50
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
𝑊𝑧,𝐴→𝐵 = 𝑘𝑄𝑞 (1
𝑟𝐵−
1
𝑟𝐴)
Natomiast praca sił pola elektrycznego jest równa:
𝑊𝐴→𝐵 = −𝑊𝑧,𝐴→𝐵
Praca w polu elektrostatycznym nie zależy od kształtu toru, po którym porusza się
ładunek ani od przebytej drogi. Zależy tylko od wartości przemieszczenia wzdłuż linii
pola elektrostatycznego. Pole elektrostatyczne jest zatem polem sił zachowawczych.
4. Energia potencjalna w polu elektrostatycznym.
Energia potencjalna w polu elektrostatycznym jest wprost proporcjonalna do
iloczynu ładunków i odwrotnie proporcjonalna do odległości miedzy ładunkiem źródła
pola a ładunkiem w punkcie. Wyraża się wzorem:
𝐸𝑝 =𝑘𝑄𝑞
𝑟
Prace siły zewnętrznej można zapisać jako różnicę energii potencjalnej w punkcie B i
w punkcie A:
𝑊𝑧,𝐴→𝐵 = 𝐸𝑝𝐵 − 𝐸𝑝𝐴 = ∆𝐸𝑝
Natomiast praca siły pola elektrostatycznego wynosi:
𝑊𝐴→𝐵 = 𝐸𝑝𝐴−𝐸𝑝𝐵 = −∆𝐸𝑝
5. Potencjał w polu elektrostatycznym.

51
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Potencjałem pola elektrostatycznego w danym punkcie nazywamy stosunek energii
potencjalnej ładunku 𝑞 w tym punkcie pola do wartości tego ładunku, co zapisujemy
wzorem:
𝑉 =𝐸𝑝
𝑞=
𝑘𝑄
𝑟
Znając różnicę potencjałów między dwoma punktami A i B możemy obliczyć pracę
przy przesuwaniu ciała o ładunku q miedzy tymi dwoma punktami:
𝑊𝑧,𝐴→𝐵 = 𝑞(𝑉𝐵 − 𝑉𝐴)
Jednostką pracy obok dżula jest 1 elektronowolt.
1 elektronowolt jest to praca, jaką wykonuje siła pola elektrostatycznego, przesuwając
cząstkę o ładunku równym jednemu ładunkowi elementarnemu między dwoma
punktami pola elektrostatycznego, między którymi istnieje różnica potencjałów 1
wolta.
1𝑒𝑉 = 1,6 ∙ 10−19𝐽
6. Zasada zachowania ładunku.
Całkowita ilość ładunku w układzie ciał izolowanych elektrycznie do innych ciał jest
stała.
𝑄 = ∑𝑞 = 𝑐𝑜𝑛𝑠𝑡
7. Pojemność kondensatora.

52
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Kondensatorem nazywamy układ przewodników, w którym obecność jednego wpływa
na zwiększenie pojemności drugiego przewodnika.
Najprostszym kondensatorem jest kondensator płaski złożony z dwóch równoległych
płyt naładowanych różnoimiennie i oddzielonych od siebie izolatorem.
Pojemność kondensatora jest wprost proporcjonalna do powierzchni jego okładek i
odwrotnie proporcjonalna do odległości miedzy nimi.
𝐶 =𝜀0𝜀𝑟𝑆
𝑑
gdzie: 𝜀0 – stała dielektryczna próżni
𝜀𝑟 - przenikalność dielektryczna ośrodka
S – powierzchnia okładek kondensatora
d – odległość miedzy okładkami kondensatora
8. Połączenie szeregowe kondensatorów.
Dla układu kondensatorów połączonych szeregowo odwrotność pojemności
kondensatora zastępczego jest równa sumie odwrotności pojemności poszczególnych
kondensatorów.
1
𝐶𝑧=
1
𝐶1+
1
𝐶2+⋯+
1
𝐶𝑛
Przy połączeniu szeregowym ładunki zgromadzone na okładkach są sobie równe.
Natomiast napięcie całkowite jest równe sumie napiec na poszczególnych
kondensatorach:
𝐶𝑛 𝐶3 𝐶2
𝐶1
𝐶𝑧

53
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
𝑈 = 𝑈1 +𝑈2 +⋯+ 𝑈𝑛
9. Połączenie równoległe kondensatorów.
Dla układu kondensatorów połączonych równolegle pojemność kondensatora
zastępczego jest równa sumie pojemności poszczególnych kondensatorów.
𝐶𝑧 = 𝐶1 + 𝐶2 +⋯+ 𝐶𝑛
Przy połączeniu równoległym napięcia na wszystkich okładkach kondensatora są takie
same.
Natomiast ładunek całkowity jest równy sumie ładunków na poszczególnych
kondensatorach:
𝑄 = 𝑄1 + 𝑄2 +⋯+𝑄𝑛
10. Energia naładowanego kondensatora.
Aby naładować kondensator należy wykonać pracę. A zatem naładowany kondensator
posiada energię, która wyraża się wzorem:
𝐸 =𝑄𝑈
2=
𝐶𝑈2
2
𝐶1 𝐶𝑛 𝐶3 𝐶2 𝐶𝑧

54
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
ZADANIA
1. Wyznacz natężenie i potencjał pola elektrycznego w punkcie leżącym pośrodku
między dwoma ładunkami punktowymi q1 i q2, jeśli C105 9
21
qq . Odległość
pomiędzy ładunkami m2r , przenikalność elektryczna próżni
mVC1085,8ε 12
0 . [3]
2. Natężenie pola elektrycznego w odległości cm41 r od naładowanej cząstki wynosi
mV101 E . Oblicz potencjał pola w odległości cm101 r od cząstki.[3]
3. Dwie metalowe kule o promieniach cm51 r i cm102 r naładowano do potencjałów
V2001 V i V2502 V . Jaki będzie wspólny potencjał V obu kul po ich połączeniu
cienkim metalowym przewodem?[3]
4. Źródłem pola elektrycznego jest układ trzech ładunków punktowych, każdy o wartości
C10 11q , umieszczonych w wierzchołkach trójkąta równobocznego o boku
. Wyznacz natężenie pola elektrycznego w środkach boków tego trójkąta. a, .
Przenikalność elektryczna próżni mF)10π36(ε 19
0
.[3]
5. Dwie metalowe kule o promieniach r i 2r umieszczono w dużej odległości od siebie.
Mniejszą kulę naładowano ładunkiem q. Następnie kule połączono cienkim
metalowym przewodem powodując przepływ ładunku na większą kulę. Jaki ładunek
pozostał na kuli o promieniu r?[3]
6. Kondensator o pojemności 𝐶1 = 20𝜇𝐹 naładowano do napięcia 𝑈1 = 200𝑉 i
odłączono od źródła napięcia. Do tak otrzymanego kondensatora dołączono
równolegle kondensator o pojemności 𝐶2 = 10𝜇𝐹. Oblicz jakie ładunki zgromadziły
się na okładkach obu kondensatorów.
7. Dane są trzy kondensatory o pojemnościach 𝐶1 = 30𝜇𝐹, 𝐶2 = 40𝜇𝐹 i 𝐶3 = 60𝜇𝐹.
Wyznacz pojemność zastępczą układu jeżeli są one połączone:
a) szeregowo
b) równolegle
c) kondensatory o pojemnościach 𝐶1 i 𝐶2 szeregowo i równolegle z
kondensatorem o pojemności 𝐶3
d) kondensatory o pojemnościach 𝐶1 i 𝐶2 równolegle i szeregowo z
kondensatorem o pojemności 𝐶3
cm2a

55
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
8. Kondensator o pojemności μF201 C naładowany do napięcia V1001 U łączymy
równolegle z drugim kondensatorem o pojemności μF302 C .
a) Ile wynosi energia E0 zgromadzona w pierwszym kondensatorze przed
połączeniem?
b) Ile wynoszą energie E1 i E2 zgromadzone w pierwszym i drugim kondensatorze po
ich połączeniu w baterię? Oblicz stosunek energii E1/E2.[3]
9. Dwa kondensatory o pojemności μF201 C i μF602 C połączono szeregowo, a
całemu układowi dostarczono ładunek C105 3Q . Znaleźć pojemność i napięcie
dla układu kondensatorów, a także napięcie na okładkach każdego kondensatora.[3]
10. Przy przesunięciu ładunku mC1q w polu elektrycznym między dwoma punktami
została wykonana praca J20W . Oblicz różnicę potencjałów U między tymi
punktami.[3]
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA
11. W odległości r od ładunku punktowego natężenie pola elektrostatycznego wynosi E0.
W odległości rd 3 od tego ładunku umieszczono drugi ładunek o tej samej wartości
ale przeciwnym znaku. Wykonaj rysunek i zaznacz w punkcie C odległym o d od
każdego z tych ładunków odpowiednie wektory natężenia pola. Na podstawie rysunku
wyznacz wypadkowe natężenie pola elektrostatycznego w punkcie C.[3]
12. W dwóch przeciwległych wierzchołkach kwadratu umieszczono dwa
jednakowe ładunki q (patrz rysunek obok). Każdy z tych ładunków
wytwarza w punkcie A potencjał V1A V . Jaki będzie całkowity
potencjał w punkcie A jeżeli w przeciwległym wierzchołku
wprowadzimy dodatkowo ładunek qQ 2 ?[3]
13. Płaski kondensator próżniowy podłączony jest do źródła napięcia stałego . Zbadaj, czy
zmienią się następujące wielkości:
a) pojemność kondensatora,
b) napięcie
c) ładunek
d) natężenie pola elektrycznego
jeśli płytki kondensatora rozsuniemy na trzykrotnie większą odległość.
q
q
Q
A

56
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
14. Jak zmieni się pojemność kondensatora, jeżeli pomiędzy jego okładki odległe o d
wsuniemy symetrycznie metalową płytkę o grubości równej połowie odległości
między okładkami kondensatora?[5]
15. Pomiędzy okładki próżniowego kondensatora wkładamy równolegle dielektryk o
stałej dielektrycznej 𝜀𝑟 w ten sposób, że wypełnia on połowę odległości między
okładkami. Oblicz stosunek pojemności tego kondensatora do pojemności
kondensatora próżniowego.[5]
16. W dwóch przeciwległych wierzchołkach kwadratu A i C umieszczono jednakowe
ładunki Q. Bok kwadratu ma długość a. Obliczyć natężenie pola E w wierzchołku B.
Jaki ładunek q należy umieścić w wierzchołku D, aby natężenie pola w punkcie B
wynosiło zero?[3]
PRĄD STAŁY
1. Prąd elektryczny i jego natężenie.
Prądem elektrycznym nazywamy uporządkowany ruch nośników ładunku pod
wpływem pola elektrycznego.
Natężeniem prądu nazywamy iloraz ładunku elektrycznego ∆𝑞 przepływającego przez
dowolny poprzeczny przekrój przewodnika do czasu ∆𝑡, w którym ten ładunek
przepłynął, czyli:
𝐼 =∆𝑞
∆𝑡

57
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Jednostką natężenia prądu elektrycznego jest 1 A (amper).
2. Prawo Ohma.
Natężenie prądu płynącego przez jednorodny przewodnik jest wprost proporcjonalna
do napięcia między końcami przewodnika, czyli:
𝐼~𝑈
Można to przedstawić graficznie:
3. Prawo Ohma dla obwodu zamknietego.
Siła elektromotoryczna ε (SEM) źródła prądu jest pracą sił zewnętrznych, które
wykonuje źródło prądu nad jednostkowym ładunkiem dodatnim.
Rozważmy obwód składający się z oporu zewnętrznego R oraz oporu wewnętrznego r
oraz siły elektromotorycznej ε:
Wówczas możemy zapisać prawo Ohma dla tego obwodu:
𝜀 = 𝐼𝑅 + 𝐼𝑟
J
U
+ -
𝜀
I
r
R

58
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
4. Opór elektryczny.
Oporem elektrycznym przewodnika nazywamy stały dla tego przewodnika w danej
temperaturze stosunek napięcia U między jego końcami do natężenia prądu I
płynącego przez ten przewodnik.
𝑅 =𝑈
𝐼
Jednostką oporu elektrycznego jest 1Ω (Ohm).
5. Praca i moc prądu elektrycznego.
Praca pola elektrycznego potrzebna na przeniesienie ładunku q miedzy końcami
przewodnika jest równa iloczynowi tego ładunku i napięcia, czyli różnicy potencjałów
na końcach przewodnika. Możemy to zapisać wzorem:
𝑊 = 𝑞𝑈 = 𝑈𝐼𝑡
Iloraz pracy W wykonanej przez stały prąd elektryczny w czasie t, w którym ta praca
została wykonana nazywamy mocą prądu elektrycznego.
𝑃 =𝑊
𝑡= 𝑈𝐼 =
𝑈2
𝑅= 𝐼2𝑅

59
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
6. Pierwsze prawo Kirchhoffa.
Suma natężeń prądów wpływających do węzła jest równa sumie natężeń prądów
wypływających z tego węzła, czyli:
𝐼1 + 𝐼2 + 𝐼3 = 𝐼4 + 𝐼5 + 𝐼6
7. Drugie prawo Kirchhoffa dla oczek.
Suma algebraiczna sił elektromotorycznych i napięć w oczku sieci jest równe zeru.
𝜀1 − 𝜀2 = 𝐼(𝑅 + 𝑟1 + 𝑟2)
𝐼6
𝐼5
𝐼4
𝐼3
𝐼2
𝐼1
𝜀2
𝜀1
R
R
I
𝑟2 𝑟1
+

60
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
8. Połączenie szeregowe oporników.
Dla układu oporników połączonych szeregowo opór zastępczy jest równa sumie
oporów poszczególnych oporników.
𝑅𝑧 = 𝑅1 + 𝑅2 +⋯+ 𝑅𝑛
Przy połączeniu szeregowym natężenie prądu jest stałe w całym obwodzie.
Natomiast napiecie całkowite jest równy sumie napięć na poszczególnych opornikach:
𝑈 = 𝑈 + 𝑈2 +⋯+ 𝑈𝑛
9. Połączenie równoległe oporników.
Dla układu oporników połączonych równolegle odwrotność oporu zastępczego jest
równa sumie odwrotności oporów poszczególnych oporników.
1
𝑅𝑧=
1
𝑅1+
1
𝑅2+⋯+
1
𝑅𝑛
𝐼 𝑈
𝑈𝑛
𝑈3
𝑈2
𝑈1
𝑅𝑛
𝑅3
𝑅2
𝑅1
𝐼𝑛 𝐼3 𝐼2 𝐼1 𝐼𝑐
𝑈 𝑅𝑛
𝑅3
𝑅2
𝑅1

61
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Przy połączeniu równoległym napięcia na poszczególnych oporach są sobie równe.
Natomiast natężenie prądu jest równe sumie natężeń, zgodnie z pierwszym prawem
Kirchhoffa:
𝐼 = 𝐼1 + 𝐼2 +⋯+ 𝐼
ZADANIA
1. Dane są trzy oporniki o wartościach 𝑅1 = 20Ω, 𝑅2 = 50Ω i 𝑅3 = 60Ω. Wyznacz
rezystancję zastępczą układu jeżeli są one połączone:
a) szeregowo
b) równolegle
c) opory 𝑅1 i 𝑅2 szeregowo i równolegle z oporem 𝑅3
d) opory 𝑅1 i 𝑅2 równolegle i szeregowo z oporem 𝑅3
2. Do akumulatora o oporze wewnętrznym 25wR i sile elektromotorycznej
V25ε podłączono metalowy drut o stałym polu przekroju poprzecznego i oporze
225R . Obliczyć:
a) natężenie I płynącego prądu.
b) napięcie U na oporze R.
c) moc prądu P wydzielaną na oporze R. [3]
3. Dany jest obwód:
Oblicz natężenie prądu płynącego w tym obwodzie, jeżeli wiadomo, że: 𝜀1 = 10𝑉,
𝜀2 = 4𝑉, 𝑟1 = 1Ω, 𝑟2 = 1Ω, 𝑅1 = 6Ω, 𝑅2 = 4Ω.
4. Dany jest układ dwóch rezystorów 𝑅1 = 100Ω i 𝑅2 połączonych równolegle, przez
który przepływa prąd o natężeniu 𝐼 = 120𝑚𝐴. Do układu doprowadzono napięcie
𝑈 = 12𝑉. Wyznaczyć rezystancję 𝑅2.
R2 r2
R1 r1
ε2
ε1

62
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
5. Dwa rezystory o rezystancjach 𝑅1 = 10Ω, 𝑅2 = 20Ω połączone są szeregowo i
dołączone do źródła o napięciu 𝑈 = 1,2𝑉. Kiedy do skrajnych zacisków układu
połączenia szeregowego dwóch rezystorów dołączono trzeci rezystor o rezystancji 𝑅𝑥,
to w gałęzi głównej układu popłynął prąd 𝐼𝑥 = 100𝑚𝐴. Wyznaczyć spadki napięć 𝑈1 i
𝑈2 na rezystorach 𝑅1 i 𝑅2 oraz wartość rezystancji 𝑅𝑥. [8]
6. Obwód elektryczny składa się z baterii o oporze wewnętrznym 2r , spiętej
opornikiem 100R , do którego równolegle jest podłączony woltomierz o oporze
400VR .
a) narysuj schemat tego obwodu
b) jaki prąd płynie przez woltomierz, gdy wskazuje on napięcie U = 40 V?
c) ile wynosi wówczas natężenie prądu płynącego przez baterię?
d) oblicz siłę elektromotoryczną baterii. [3]
7. W obwodzie przedstawionym na poniższym rysunku płynie prąd o natężeniu A2I .
Siły elektromotoryczne źródeł są odpowiednio równe V8ε1 , V2ε2 , zaś ich
opory wewnętrzne wynoszą 121 rr . Opornik ma opór 3R . Jaką wartość
napięcia zmierzy woltomierz (zakładamy, że opór woltomierza jest nieskończenie
duży) między punktami A i B oraz C i A? [3]
8. Dany jest układ trzech rezystorów o rezystancjach 𝑅1 = 40Ω, 𝑅2 = 60Ω i 𝑅3 = 20Ω
połączonych szeregowo. Do zacisków układu rezystorów doprowadzono napięcie
𝑈 = 240𝑉. Obliczyć prąd płynący w układzie oraz napięcia na każdym z rezystorów.
9. Żarówka o mocy W60P przystosowana jest do napięcia V120U . Do sieci o
napięciu V2301 U włączono dwie takie żarówki połączone szeregowo. Jaka moc
wydziela się w obu żarówkach?[3]
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA
C BAr r
R
1 1 2 2

63
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
10. Obwód elektryczny składa się z akumulatora o sile elektromotorycznej 𝜀 oraz
opornika o oporności R. Po zamknięciu obwodu różnica potencjałów na zaciskach
akumulatora jest równa U. Obliczyć oporność wewnętrzną tego akumulatora.
Narysować schemat obwodu.[3]
11. Radioodbiornik przystosowany do napięcia 120V pobiera moc 50W. Jaki opór i w jaki
sposób (szeregowo czy równolegle) należy dołączyć do odbiornika aby włączyć go do
sieci o napięciu 230V?[3]
12. Równolegle do oporu 91R , który jest podłączony do baterii włączono opór
32R . Okazało się, że moc wydzielona w zewnętrznej części obwodu nie zmieniła
się. Wyznacz opór wewnętrzny baterii.[3]
13. Czajnik elektryczny ma dwa uzwojenia. Po włączeniu jednego z nich woda
zagotowała się po czasie min151 t , a po włączeniu drugiego woda zagotowała się po
min202 t . Po jakim czasie woda zagotuje się po włączeniu równoległym obydwu
uzwojeń? Zaniedbujemy straty spowodowane wymianą energii z otoczeniem.[3]
14. Dwie żarówki o mocach W151 P i W252 P połączono równolegle i włączono w
sieć pod napięcie V220U . Oblicz opór elektryczny układu żarówek.[3]
15. Oblicz opór przewodnika, przez który przepłynął ładunek 90C w czasie 0,5h pod
napięciem 18V.
16. Dane są trzy opory 𝑅1 = 6Ω, 𝑅2 = 4Ω, 𝑅3 = 8Ω. Oblicz opór zastępczy, jeżeli:
a) opory R1, R2, R3 są połączone szeregowo
b) opory R1, R2, R3 są połączone równolegle
c) opory R1, R2 są połączone szeregowo i równolegle z oporem R3
d) opory R1, R2 są połączone równolegle i szeregowo z oporem R3

64
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
ELEMENTY SZCZEGÓLNEJ TEORII WZGLĘDNOŚCI
W 1905 Albert Einstein sformułował pewna teorię zwaną szczególną teorią
względności. Była ona w pewnym sensie zaprzeczeniem klasycznej mechaniki
newtonowskiej. Zmieniła ona sposób pojmowania czasu i przestrzeni. Einstein oparł
swoją teorię na dwóch postulatach:
Prędkość światła jest jednakowa we wszystkich inercjalnych układach
odniesienia.
Według teorii Einsteina nic co posiada masę nie może poruszać się z
prędkością większą niż światło.
Prędkość światła wynosi 𝑐 = 3 ∙ 108
1. Masa i pęd w ujęciu relatywistycznym.
Zgodnie ze wzorem Einsteina 𝐸 = 𝑚𝑐2 zmiany energii ciała w mechanice
relatywistycznej powodują zmianę jego masy. Taką masę nazywamy masą
relatywistyczną, natomiast masę m0 nazywamy masą spoczynkową, czyli masą ciała,
które nie porusza się z prędkością bliską prędkości światła.
𝑚 =𝑚0
√1 −𝑣2
𝑐2
Pęd w mechanice relatywistycznej wyraża się wzorem:
𝑝 =𝑚0𝑣
√1 −𝑣2
𝑐2
2. Relatywistyczna transformacja prędkości.
Jeżeli szybkość światła jest jednakowa we wszystkich inercjalnych układach
odniesienia, to dla bardzo dużych prędkości nie jest prawdziwy wzór na prędkość

65
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
względną, gdyż wtedy otrzymalibyśmy prędkość większą od prędkości światła, a tak
być nie może.
Dla ciała poruszającego się z prędkością v’ w układzie U’, którego prędkość w
układzie U ma ten sam kierunek i zwrot co v’, prędkość w układzie U jest równa:
𝑣 =𝑣′ + 𝑢
1 +𝑢𝑣′𝑐2
3. Energia w ujęciu relatywistycznym.
Całkowita energia relatywistyczna wyraża się wzorem:
𝐸 =𝑚0𝑐
2
√1 −𝑣2
𝑐2
= 𝑚𝑐2
Energia spoczynkowa w mechanice relatywistycznej wyraża się wzorem:
𝐸0 = 𝑚0𝑐2
Często wzór ten nazywany jest równoważnością masy i energii.
Relatywistyczna energia kinetyczna jest różnicą całkowitej energii relatywistycznej i
energii spoczynkowej:
𝐸 = 𝐸 − 𝐸0 =𝑚0𝑐
2
√1 −𝑣2
𝑐2
−𝑚0𝑐2
Związek pędu masy i energii.
Pomiędzy masą pędem i energią zachodzi następujący związek:

66
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
𝐸2 = 𝑐2(𝑝2 +𝑚02𝑐2)
4. Dylatacja czasu.
Niech ∆𝑡 będzie czasem upływającym miedzy tymi samymi zdarzeniami
obserwowanymi z układu U, który porusza się względem układu U’ z prędkością v.
Natomiast ∆𝑡′ niech będzie czasem własnym upływającym miedzy dwoma
zdarzeniami w układzie U’.
Czas ∆𝑡 jest zawsze dłuższy od czasu własnego, co można zapisać następująco:
∆𝑡 =∆𝑡′
√1 −𝑣2
𝑐2
Zjawisko to nosi nazwę dylatacji czasu, czyli wydłużenia.
5. Kontrakcja długości.
Zjawisko kontrakcji dotyczy długości ciała w kierunku ruchu i polega na skróceniu
długości ciała w układzie, względem którego ciało to porusza się z prędkością
zbliżoną do prędkości światła. Jeżeli ciało znajduje się w spoczynku względem układu
U’, który porusza się z prędkością v względem układu U, to możemy to zapisać
wzorem:
𝑙 = 𝑙0√1−𝑣2
𝑐2
NALEŻY PAMIĘTAC, ŻE:
WSZYSTKIE WZORY SZCZEGÓLNEJ TEORII WZGLĘDNOSCI DLA 𝑣 ≪ 𝑐
PRZECHODZĄ WE WZORY MECHANIKI KLASYCZNEJ.

67
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
ZADANIA
1. Z jaką prędkością porusza się cząstka, jeżeli jej masa relatywistyczna jest 1,2 razy
większa od jej masy spoczynkowej?
2. Dwie rakiety poruszają się naprzeciw siebie ze stałymi prędkościami. Prędkość
pierwszej rakiety wynosi 𝑣1 = 0,3𝑐, a prędkość drugiej rakiety 𝑣2 = 0,4𝑐. Obliczyć
szybkość względną tych rakiet, jeżeli poruszają się one:
a) w tym samym kierunku,
b) w przeciwnym kierunku.
3. Stosunek energii kinetycznej poruszającej się cząstki o masie m do jej pędu wynosi
0,6 ∙ 108
. Oblicz z jaką prędkością porusza się cząstka.
4. W układzie U’ poruszającym się ze stałą prędkością v względem osi X układu
współrzędnych znajduje się pręt o długości 𝑙0 = 2𝑚 tworzący z osią X kąt 𝛼 = 30°.
Jaka długość pręta i jaki kąt zmierzy obserwator znajdujący się w układzie U, który się
nie porusza.
5. Mion poruszający się z prędkością 𝑣 = 0, 𝑐 przebywa pewną drogę. Oblicz tę drogę
jeśli wiadomo, że czas jego życia wynosi 𝑡 = 2,5 ∙ 10−6𝑠.
6. Jaki pęd i jaką energię kinetyczną posiada proton, który został przyspieszony w
akceleratorze do prędkości 𝑣 = 0, 𝑐.
7. Jasiu wybiera się w podróż statkiem kosmiczny, który porusza się z prędkością
𝑣 = 0,5𝑐. Wiadomo, że podróż będzie trwała 5 lat. Ile lat upłynie w tym czasie na
Ziemi?
8. Długość pręta wynosi 𝑙0 = 3𝑚. Oblicz jego długość jeżeli został on przyspieszony do
prędkości 𝑣 = 0,6𝑐.
9. Masa relatywistyczna cząstki jest 1,4 razy większa od jej masy spoczynkowej. Oblicz
pęd tej cząstki oraz energię spoczynkową.
10. W spoczywającą cząstkę o masie 𝑚0 uderza cząstka o tej samej masie spoczynkowej
𝑚0 i energii kinetycznej 𝐸 . W wyniku tego zderzenia obie cząstki łączą się w jedną
całość i poruszają się razem. Z jaką prędkością poruszają się te cząstki razem i jaka
jest ich masa spoczynkowa?

68
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
11. Oblicz zgodnie z zasadami mechaniki klasycznej jakie powinno być napięcie pola
elektrycznego, aby poruszający się w nim elektron uzyskał prędkość światła? Jaką
prędkość uzyska w tym polu elektron zgodnie z zasadami mechaniki
relatywistycznej?[4]
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA
12. Dwie rakiety poruszają się naprzeciw siebie ze stałymi prędkościami. Prędkość
pierwszej rakiety wynosi 𝑣1 = 0,4𝑐, a prędkość drugiej rakiety 𝑣2 = 0,6𝑐. Obliczyc
szybkość względną tych rakiet, jeżeli poruszają się one:
a) w tym samym kierunku,
b) w przeciwnym kierunku.
13. Cząstka o masie spoczynkowej 𝑚0 = 6,64 ∙ 10−27𝑘𝑔 została przyspieszona do
prędkości 𝑣 = 0,5𝑐. Jak zmieniła się masa tej cząstki? Jaki jest jej pęd i energia
kinetyczna?
14. Spoczywająca cząstka o masie 𝑚0 rozpada się na dwie cząstki o masach
spoczynkowych równych odpowiednio 𝑚1 i 𝑚2. Znaleźć energie kinetyczne tych
cząstek.
15. Oblicz pęd protonu i jego energię całkowitą, jeśli został on przyspieszony w
akceleratorze do prędkości 𝑣 = 0,8𝑐.
16. Pan Janusz zaplanował, że 30 dni urlopu wykorzysta na podróż statkiem kosmicznym.
Wiadomo, że statek kosmiczny porusza się z prędkością 𝑣 = 0,8𝑐. Jak długi będzie w
rzeczywistości urlop pana Janusza?
17. Oblicz masę spoczynkową cząstki poruszającej się z prędkością 𝑣 = 0,6𝑐, jeżeli jej
pęd jest równy 25 ∙ 106𝑘𝑔 ∙
.
18. Spoczywająca cząstka o masie m rozpada się dwie części o masach spoczynkowych
0,3m i 0,7m. Oblicz energię kinetyczną każdej części oraz ich stosunek.

69
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
HYDROSTATYKA
1. Ciśnienie i siła parcia.
Ciśnieniem nazywamy stosunek siły F jaką dana ciecz, lub gaz lub ciało stałe wywiera
na jednostkę powierzchni S, czyli:
𝑝 =𝐹
𝑆
Jednostką ciśnienia jest 1 Pascal (1Pa). Ciśnienie jest równe 1 Pascalowi, gdy ciało
działa siłą równą 1N na powierzchnię o wielkości 1m2.
Ciśnienie jest wielkością skalarną.
Siłą parcia nazywamy siłę F, jaką gaz lub ciecz lub ciało stałe o ciśnieniu p wywiera
na powierzchnie S, czyli:
𝐹 = 𝑝𝑆
Siła ta działa na każdy element powierzchni naczynia i jest skierowana do niego
prostopadle.
2. Ciśnienie hydrostatyczne.

70
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Ciśnieniem hydrostatycznym nazywamy ciśnienie jakie wywiera słup cieczy na dno
naczynia. Ciśnienie hydrostatyczne zależy od wysokości słupa cieczy a nie od kształtu
naczynia.
Ciśnienie hydrostatyczne wyraża się wzorem:
𝑝 = 𝜌𝑔ℎ
gdzie: ρ – gęstość cieczy
g – przyspieszenie ziemskie
h – wysokość słupa cieczy
3. Prawo Pascala.
Ciśnienie spowodowane działaniem z zewnątrz sił na ciecz lub gaz jest przekazywane
we wszystkich kierunkach jednakowo i zawsze prostopadle do ścianek naczynia.
4. Prasa hydrauliczna.
Porównując wartości ciśnień otrzymujemy równanie dla prasy hydraulicznej:
𝐹1𝑆1
=𝐹2𝑆2
5. Naczynia połączone.
F1
F2
S1
S2

71
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
Poziom cieczy jednorodnej w naczyniach połączonych jest stały i nie zależy od
kształtu tych naczyń. Jeżeli ta ciecz lub gaz jest w równowadze, to ciśnienie panujące
na tym samym poziomie we wszystkich ramionach naczyń jest takie samo.
Jeśli w naczyniach połączonych będą się znajdowały dwie różne (nie mieszające się)
ciecze w równowadze, to ciśnienie panujące na poziomie zetknięcia cieczy i na
każdym poziomie poniżej zetknięcia, są takie same.
6. Równanie ciągłości.
Jeżeli założymy, że ciecz jest nieściśliwa i nielepka, równanie ciągłości możemy
zapisać następująco:
𝑆1𝑣1 = 𝑆2𝑣2
gdzie: S1 – pole powierzchni pierwszej
S2 – pole powierzchni drugiej
v1 – prędkość przepływu cieczy przez powierzchnie S1
v2 - prędkość przepływu cieczy przez powierzchnie S2
7. Prawo Archimedesa.
Na każde ciało zanurzone w cieczy, lub w gazie działa siła wyporu skierowana
pionowo do góry, równa co do wartości ciężarowi wypartej cieczy.
Możemy to zapisać wzorem:
𝐹𝐴 = 𝑉𝑧𝜌𝑐𝑔
gdzie: 𝑉𝑧 - objętością zanurzonego ciała lub jego zanurzonej części
𝜌𝑐 – gęstość cieczy, w której zanurzono ciało
g – przyspieszenie ziemskie
ZADANIA
1. Masa pojemnika całkowicie wypełnionego wodą wynosi 𝑚1 = 560𝑔. Gdy do tego
pojemnika wrzucono kamyk o masie 𝑚2 = 50𝑔, część wody wylała się i wówczas

72
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
masa wody, pojemnika i kamyka była równa 𝑚3 = 480𝑔. Oblicz gęstość kamyka,
jeśli gęstość wody jest równa 𝜌𝑤 = 1𝑔
𝑐 3.
2. W naczyniu cylindrycznym o podstawie 2cm5S znajduje się rtęć i woda. Masy obu
cieczy są sobie równe. Wysokość słupa obu cieczy w naczyniu wynosi cm30h .
Wiedząc, że gęstość rtęci wynosi 33
r mkg106,13ρ , a wody 33
w mkg10ρ i
przyspieszenie ziemskie 2sm8,9g , oblicz siłę parcia cieczy na dno naczynia.
3. Jaka jest średnia gęstość ryby tkwiącej nieruchomo w morskiej wodzie której gęstość
jest równa 𝜌𝑤 = 1,05𝑔
𝑐 3?
4. Kra lodowa o powierzchni 2m5,0S i jednakowej grubości pływa w wodzie
wynurzona na powierzchnię na wysokość cm5h . Wiedząc, że gęstość lodu wynosi
3
l mkg900ρ a wody 33
w mkg10ρ oblicz masę kry lodowej.
5. Kulka drewniana o gęstości 3
k mkg640ρ znajduje się na głębokości m1h
poniżej poziomu wody o gęstości 33
w mkg10ρ . Kulkę tę puszczono. Oblicz na jaką
wysokość H wyskoczy kulka ponad poziom wody? Siły tarcia pomijamy.
6. Łódź podwodna znajduje się na głębokości 300m. Oblicz, jakie działa na nią ciśnienie
i ile razy to ciśnienie jest większe od ciśnienia atmosferycznego, które wynosi
Pa105
A p . Wartość przyspieszenia ziemskiego jest równa 2sm10g a gęstość
wody 33 mkg10ρ .
7. W próżni ciężar ciała wynosi P1, w wodzie P2, a w badanej cieczy wynosi P3. Oblicz
gęstość ciała i gęstość badanej cieczy. Obliczenia numeryczne wykonać dla N8,11 P ,
N6,12 P i N66,13 P .[3]
ZADANIA DO SAMODZIELNEGO ROZWIĄZANIA
8. W naczyniu o kształcie walca znajduje się ciecz. Całą tę ciecz przelano do drugiego
naczynia w kształcie walca, którego promień podstawy jest n = 3 razy mniejszy. Jak
zmieni się parcie oraz ciśnienie cieczy na dno naczynia?[3]

73
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
9. Oblicz gęstość drewna, z którego wykonano klocek sześcienny, jeśli po zanurzeniu go
w nafcie o gęstości 𝜌𝑛 = 84 𝑔
3 pływa on zanurzony do 4
5 swojej objętości.[11]
10. W naczyniu cylindrycznym pod tłokiem znajduje się ciecz o gęstości 3cmg9,0ρ .
Siła nacisku na tłok wynosi N10F . Jaka jest siła parcia na dno naczynia jeżeli
wysokość słupa cieczy wynosi m5,0h a średnica tłoka wynosi cm10d ?[3]
11. Probówka obciążona ołowiem waży N2,0P i pływając w cieczy o gęstości
3
1 cmg8,0ρ zanurza się do pewnej głębokości. W innej cieczy, o gęstości ρ2
zanurza się do tej samej głębokości po wrzuceniu dodatkowego ciężarka N05,0Q .
Obliczyć ρ2.[3]
12. Kra lodowa o powierzchni 2m1,0S i jednakowej grubości pływa w wodzie
wynurzona na powierzchnię na wysokość cm5h . Gęstość lodu 3
l mkg900ρ ,
wody 33
w mkg10ρ . Oblicz masę kry lodowej.[3]
13. Do wody o gęstości 33 mkg10ρ spada kulka o masie g2m i objętości 3cm3V
z wysokości cm20H , liczonej od powierzchni wody. Nie uwzględniaj lepkości i
napięcia powierzchniowego wody. Przyjmij wartość przyspieszenia ziemskiego 2sm10g .
a) Jakie siły działają na kulkę w wodzie? Przedstaw je graficznie i oblicz siłę
wypadkową.
b) Oblicz głębokość, na jaką zanurzy się kulka.[3]

74
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
LITERATURA:
1. R. Resnick, D. Halliday, Fizyka cz.1 i 2 PWN Warszawa 1994
2. K. Sierański, P. Sitarek, K. Jezierski, Repetytorium Wzory i prawa z objaśnieniami,
Oficyna Wydawnicza Scripta Wrocław 2002
3. K. Jezierski, K. Sierański, I. Szlufarska, Repetytorium Zadania z rozwiązaniami
Oficyna Wydawnicza Scripta Wrocław 2003
4. K. Jezierski, B. Kołodka, K. Sierański Zadania z rozwiązaniami Oficyna Wydawnicza
Scripta Wrocław 1996
5. K. Chyla Zbiór prostych zadań z fizyki Wydawnictwo „Zamiast Korepetycji” Kraków
1996
6. W. Mroszczyk, J. Salach Zbiór zadań z fizyki Zamkor Kraków 2005
7. J. Jędrzejewski, W. Kruczek, A. Kujawski Zbiór zadań z fizyki t. 1 i 2 WNT Warszawa
1995

75
Projekt „Inżynieria materiałowa – inżynieria przyszłości” współfinansowany ze środków Unii Europejskiej w ramach Europejskiego Funduszu Społecznego
8. M. Pilawski Elementy obwodów prądu stałego WSiP Warszawa 1986
9. M. Pilawski Elementy obwodów prądu zmiennego WSiP Warszawa 1990
10. W. Dziurda, T. Stępień Zbiór zadań z fizyki z rozwiązaniami cz.II Wydawnictwo
Politechniki Krakowskiej, Kraków 2000
11. U.Ilczuk, E.Kurek Konkursy z fizyki WSiP, Warszawa 1993