Dynamicznemodelerelacji...
56
Transcript of Dynamicznemodelerelacji...
Uniwersytet WarszawskiWydziaª Matematyki, Informatyki i Mechaniki
Natalia BielczykNr albumu: 219556
Dynamiczne modele relacjiinterpersonalnych z opó¹nieniem
Praca magisterskana kierunku MATEMATYKA
Praca wykonana pod kierunkiemprof. dr hab. Tadeusza PªatkowskiegoInstytut Matematyki Stosowanej i Mechaniki
Lipiec 2010
O±wiadczenie kieruj¡cego prac¡
Potwierdzam, »e niniejsza praca zostaªa przygotowana pod moim kierunkiem i kwali�kuje si¦do przedstawienia jej w post¦powaniu o nadanie tytuªu zawodowego.
Data Podpis kieruj¡cego prac¡
O±wiadczenie autora (autorów) pracy
�wiadom odpowiedzialno±ci prawnej o±wiadczam, »e niniejsza praca dyplomowa zostaªa napisanaprzeze mnie samodzielnie i nie zawiera tre±ci uzyskanych w sposób niezgodny z obowi¡zuj¡cymiprzepisami.
O±wiadczam równie», »e przedstawiona praca nie byªa wcze±niej przedmiotem procedur zwi¡zanychz uzyskaniem tytuªu zawodowego w wy»szej uczelni.
O±wiadczam ponadto, »e niniejsza wersja pracy jest identyczna z zaª¡czon¡ wersj¡ elektron-iczn¡.
Data Podpis autora (autorów) pracy

Streszczenie
Praca dotyczy liniowych i nieliniowych modeli diadycznych z opó¹nieniem oraz liniowych modeli tria-dycznych z opó¹nieniem, opisuj¡cych relacje interpersonalne. Zasadnicz¡ cz¦±¢ pracy stanowi klasy�kacjawszystkich typów diad liniowych, ale w oparciu o te wyniki rozwa»ono te» triad¦ z opó¹nieniem oraz dwamodele nieliniowe.
Rozpatrzony zostaª problem istnienia rozwi¡za«, w najprostszych przypadkach zostaªy zastosowaneanalityczne metody rozwi¡zywania, a tak»e przeanalizowano stabilno±¢ asymptotyczn¡ rozwi¡za« w za-le»no±ci od warto±ci opó¹nienia i parametrów modelu. Analiza stabilno±ci dokonana zostaªa z u»y-ciem kryterium Michajªowa, a tak»e innych twierdze« u»ywanych w analizie systemów dynamicznych zopó¹nieniem. Pokazane zostaªy równie» rozwi¡zania numeryczne dla dwóch nowych, zaproponowanych napotrzeby tej pracy modeli nieliniowych, obrazuj¡ce, na czym polega stabilno±¢ asymptotyczna rozwi¡za«w ukªadach tego typu.
Sªowa kluczowe
równania ró»niczkowe zwyczajne z opó¹nieniem, ukªady dynamiczne, kryterium Michajªowa
Dziedzina pracy (kody wg programu Socrates-Erasmus)
11.1 Matematyka
Klasy�kacja tematyczna
91E99 Mathematical Psychology / None of the above
Tytuª pracy w j¦zyku angielskim
Dynamical Models of Interpersonal Interactions with Delay


Spis tre±ci
1. Wst¦p . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1. Ukªady dynamiczne w psychosocjologii . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2. Modele liniowe versus nieliniowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.1. Zagadnienia z czynnikiem decyzyjnym . . . . . . . . . . . . . . . . . . . . . . . . . 71.2.2. Zagadnienia z czynnikiem motywacyjnym . . . . . . . . . . . . . . . . . . . . . . . 71.2.3. Równania logistyczne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.4. Zjawisko histerezy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3. Analiza ukªadów dynamicznych . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3.1. Przestrze« fazowa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.3.2. Rodzaje stabilno±ci, atraktory i bifurkacje . . . . . . . . . . . . . . . . . . . . . . . 9
1.4. Ukªady dynamiczne w modelowaniu relacji mi¦dzyludzkich . . . . . . . . . . . . . . . . . . 11
2. Model dynamiczny zwi¡zku Romea i Julii z opó¹nieniem . . . . . . . . . . . . . . . . . 132.1. Model liniowy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1.1. Budujemy model liniowy z opó¹nieniem od pocz¡tku czyli równania oscylatora . . 132.1.2. Równania oscylatora z jednym opó¹nieniem . . . . . . . . . . . . . . . . . . . . . . 142.1.3. Równania oscylatora z jednym opó¹nieniem w dwóch miejscach . . . . . . . . . . . 162.1.4. Równania oscylatora z tªumieniem . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.1.5. Równania oscylatora z tªumieniem i opó¹nieniem . . . . . . . . . . . . . . . . . . . 18
3. Triada romantyczna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4. Modele nieliniowe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.1. Model Romeo - m¦»czyzna trudny . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.2. Model re�eksyjny Romeo - impulsywna Julia . . . . . . . . . . . . . . . . . . . . . . . . . 42
5. Podsumowanie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
A. Przykªad ukªadu o trzech przedziaªach stabilno±ci . . . . . . . . . . . . . . . . . . . . . 49
Bibliogra�a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
3

Rozdziaª 1
Wst¦p
1.1. Ukªady dynamiczne w psychosocjologiiW historii psychosocjologii miaªo miejsce wiele prób zaszczepienia metod i narz¦dzi z nauk przy-
rodniczych (Nowak, 1998). Przez dªu»szy czas próby te byªy jednak porzucane ze wzgl¦du na zbytnie,zdaniem psychologów, uproszczenia, które nale»aªoby podj¡¢, aby wypracowa¢ jakiekolwiek modele dy-namiczne interakcji mi¦dzyludzkich. Na przykªad klasyczny behawioryzm, który kªadzie du»y nacisk naewolucj¦ zachowania opart¡ na percypowaniu otoczenia i empirycznym poznawaniu, cho¢ wydawaªoby si¦to naturaln¡ konsekwencj¡, nigdy nie staª si¦ podstaw¡ do zbudowania takich modeli.
Psychologia napotkaªa generaln¡ trudno±¢ w ujmowaniu w równania niuansowej natury ludzkich my±li,uczu¢ i dziaªa«, ale z drugiej strony zjawisko zwi¡zane z ludzkim do±wiadczeniem jest tak wa»nym obiek-tem poznania, »e badanie tego fenomenu stanowi wr¦cz obowi¡zek nauki jako takiej.
Wraz z rozwojem wspóªczesnej matematyki stosowanej pierwsze próby wyj±cia spod tego impasustaªy si¦ mo»liwe. W latach 70-tych pojawiªy si¦ nieliniowe ukªady dynamiczne, które radykalnie po-szerzyªy mo»liwo±ci opisu zjawisk spotykanych w naturze. To podej±cie zyskaªo sobie du»¡ popularno±¢ zewzgl¦du na fakt, »e te same równania mo»na cz¦sto odnie±¢ do zupeªnie ró»nych procesów zachodz¡cychw przyrodzie - pocz¡wszy od mechaniki pªynów, poprzez analiz¦ przepªywu fal mózgowych, na reak-cjach chemicznych sko«czywszy. Ta pannaukowa wªasno±¢ modeli dynamicznych stworzyªa wra»enie, »estanowi¡ one spójn¡ caªo±¢, która daje dobry opis procesów zachodz¡cych w rzeczywistym ±wiecie, atakie zjawiska jak chaos, matematycznie nieintuicyjne atraktory czy efekt motyla, które pojawiaj¡ si¦ wnieliniowych modelach dynamicznych, tylko spot¦gowaªy to wra»enie.
Ukªad dynamiczny w ogólno±ci jest ukªadem, który ewoluuje w czasie. Oznacza to, »e stan ukªaduw danej chwili determinuje stan ukªadu w chwili nast¦pnej, dlatego mo»na powiedzie¢, »e rozwój takiegoukªadu jest generowany wewn¦trznie, oraz »e ukªad ten ma zdolno±¢ ewoluowania niezale»nie od warunkówzewn¦trznych. �ródªem zmian w ukªadzie jest wzajemny wpªyw jednych zmiennych na inne. Swego czasuzaobserowowano, »e wiele procesów zachodz¡cych w przyrodzie zawiera nieliniowe zale»no±ci, ale daje si¦je upro±ci¢ z zadowalaj¡c¡ dokªadno±ci¡, wprowadzaj¡c zale»no±ci liniowe.
Jednym z najwi¦kszych odkry¢ lat 80-tych byªa obserwacja, i» nawet proste ukªady, skªadaj¡ce si¦z kilku elementów, mog¡ wykazywa¢ bardzo skomplikowane zachowania, gdy równania ewolucji ukªaduposiadaj¡ czªony nieliniowe. Przyniosªo to nadziej¦, »e nawet wyj¡tkowo skomplikowane zjawiska w psy-chosocjologii mog¡ znale¹¢ relatywnie proste wytªumaczenie.
W procesie dynamicznym warto±¢ danej zmiennej w czasie t zale»y od warto±ci tej zmiennej w czasiet− 1, a tak»e determinuje warto±¢ zmiennej w czasie t + 1. Ta sama zmienna mo»e wi¦c by¢ traktowanazarówno jako przyczyna, jak i nast¦pstwo, co staje w sprzeczno±ci z tradycyjnym sposobem my±leniao jednokierunkowej relacji pomi¦dzy przyczyn¡ a skutkiem i tworzy swego rodzaju p¦tle przyczynowo-skutkowe. W historii psychologii zdarzaªy si¦ ju» jednak postulaty, by w ten sposób tªumaczy¢ ró»nezjawiska w socjopsychologii (Bandura 1986, za: Nowak).
W rzeczywistych ukªadach ¹ródªem zmian s¡ nie tylko zale»no±ci pomi¦dzy skªadowymi ukªadu (czyn-niki wewn¦trzne), ale te» wpªyw czynników zewn¦trznych. Trudno sobie wyobrazi¢, by �czynnik sytua-cyjny� lub �bodziec� wpªyn¡ª na zachowanie danej osoby niezale»nie od jej uwarunkowa« osobowo±ciowychi do±wiadczenia, i vice versa - dana osoba w ró»nych warunkach zachowa si¦ ró»nie. Dlatego w psychologiinacisk poªo»ono na podej±cie �osoba a sytuacja� (patrz: teoria ról, Lewicka 1993).
5

Ukªady dynamiczne mo»na zaobserowa¢ na ka»dym poziomie »ycia spoªecznego, pocz¡wszy od procesuksztaªtowania opinii, b¦d¡cego ukªadem dynamicznym zamkni¦tym w gªowie pojedynczego czªowieka, a»po interakcje pomi¦dzy grupami ludzi, a nawet caªymi spoªecze«stwami (gdzie czynnikiem zewn¦trznymmo»e by¢ na przykªad gro¹ba ze strony obcego pa«stwa).
Zmiany generowane wewn¦trznie przez ukªad dynamiczny warto charakteryzowa¢, o ile to mo»liwe,poprzez ogólny schemat tych zmian. Na przykªad, wahania pogodowe na przestrzeni czasu s¡ na ogóªbardziej interesuj¡ce ni» sekwencja kolejnych pojedynczych zmian w kolejnych chwilach dla wilgotno±ci,temperatury itd. W kontek±cie socjopsychologii, sugeruje to skupienie uwagi na stabilno±ci versus zmi-enno±ci cech pewnego zjawiska, jak na przykªad postawa danej osoby, która mo»e osi¡ga¢ bardzo ró»newarto±ci w dªu»szej perspektywie, ale je±li z przebiegu zmienno±ci tej cechy wyªoni si¦ pewien wzór,mo»emy mówi¢ o przewidywalno±ci i staªo±ci zjawiska.
Tendencja generowanych wewn¦trznie zmian do formowania prawidªowo±ci w czasie pomaga w uargu-mentowaniu tezy, »e my±l ludzka mo»e by¢ celnie scharakteryzowana jako strumie« ±wiadomo±ci (James1980, za: Nowak), b¦d¡cych ci¡giem nast¦puj¡cych po sobie my±li, który jednak jako proces ma cechyosobnicze. Oznacza to równie», »e my±lenie nie mo»e by¢ modelowane poprzez staª¡ struktur¦, je±linast¦pstwo my±li zdradza pewne prawidªowo±ci, czyli nie mo»na scharakteryzowa¢ my±lenia danej osobypoprzez u±rednienie w czasie pewnych warto±ci (najprostszy przykªad: osoba wykazuj¡ca ambiwalentneuczucia wobec innej osoby, stanowi¡ce ci¡g przeplataj¡cej si¦ miªo±ci i nienawi±ci, nie mo»e zosta¢ pod-sumowana jako osoba przyjmuj¡ca ±rednio neutralne stanowisko wobec drugiej osoby).
Rozwa»anie wzorów zachowania i procesów my±lowych w czasie ma te» du»o wspólnego z odwiecznymproblemem psychologii - teori¡ osobowo±ci. Z jakich± przyczyn ka»dego dnia budzimy si¦ ze snu jako tasama osoba, maj¡ca podobne wzorce reagowania na bod¹ce jak poprzednio, i wzorce te relatywnie powolizmieniaj¡ si¦ w czasie.
Opis osobowo±ci jako takiej wymaga odpowiedniego, dynamicznego podej±cia. Na przykªad, wyobra¹mysobie osob¦, która wykazuje pewn¡ zmienno±¢ pod wzgl¦dem stopnia, w jakim miewa ochot¦ na spotkaniaz innymi lud¹mi - bywaj¡ sytuacje, w których wykazuje wysoki bardzo poziom ekstrawersji, garnie si¦do innych, ªatwo anga»uje si¦ we wspólne przedsi¦wzi¦cia i z ch¦ci¡ przyjmuje zaproszenia w nieznanejej dot¡d miejsca; chwile przeplataj¡ si¦ jednak z sytuacjami, w których osoba ta preferuje cisz¦, spokóji samotno±¢, i nie jest ªatwo nakªoni¢ j¡ do wszelkiego kontaktu. Ten przykªad odpowiada rzeszy osóbdotkni¦tych tzw. depresj¡ dwubiegunow¡ (Ozgördal, 2009), której rozprzestrzenienie szacuje si¦ na 1%populacji w skali ±wiata. Spróbujmy teraz przyj¡¢, »e zachowanie takiej osoby jest chaotyczne i uwarunk-owane sytuacyjnie. Id¡ce za tym rozumowanie prowadzi do bª¦dnego wniosku, »e warto±¢ oczekiwananastroju, w jakim znajdziemy t¡ osob¦, b¦dzie zbli»ona do ±redniej, je±li chodzi o poziom ekstrawersji,czyli ani bardzo intro-, ani wyj¡tkowo ekstrawertyczne, podczas gdy w rzeczywisto±ci takie zachowaniemo»e si¦ u tej osoby nie pojawia¢ w ogóle. Natomiast je±li przyjmiemy, »e zmienno±¢ i pewna amplitudanastroju jest powtarzaln¡ prawidªowo±ci¡, zachowanie tej osoby stanie si¦ bardziej przewidywalne i mo»nab¦dzie powiedzie¢ o pewnej cesze, lub raczej w tym wypadku o wªa±ciwo±ci choroby, na któr¡ cierpi.
Nic zatem dziwnego, »e w latach 90-tych XX w. w psychologii osobowo±ci pojawiªa si¦ tendencja doopisu jednostki w kategoriach wzorców zachowania raczej ni» ±redniej wyci¡ganej z caªej palety postaw,które w ró»nym stopniu przejawia. Na przykªad teoria Mischela (1995, za: Nowak) mówi o staªo±cimechanizmów wewn¦trznych, które prowadz¡ do generowania zachowania, a nie o staªo±ci zachowaniajako takiego.
Odkrywanie wzorów i prawidªowo±ci stanowi klucz do zrozumienia procesów, których model stanowi¡ukªady dynamiczne. W tym celu stworzono i rozwini¦to wiele narz¦dzi matematycznych, jak analizaFouriera, falki czy analiza stanów koherentnych.
6

1.2. Modele liniowe versus nieliniowe1.2.1. Zagadnienia z czynnikiem decyzyjnym
W wielu przypadkach w psychologii nie mo»emy si¦ odwoªa¢ do modelów, w których ewolucja ka»dejze zmiennych zale»y w liniowy sposób od warto±ci pozostaªych, czego przykªad stanowi problem progu(Kondo, 2009). W takim ukªadzie zmiana warto±ci A nie ma »adnego wpªywu na warto±¢ zmiennej B,dopóki pewna warto±¢ krytyczna A nie zostanie osi¡gni¦ta. Przy tej warto±ci krytycznej nast¦puje pewnazmiana warto±ci B, ale ju» »adne pó¹niejsze podwy»szenie warto±ci A nie wpªywa na kolejne zmiany B.
W zasadzie, ukªady tej natury pojawiaj¡ si¦ wsz¦dzie tam, gdzie mamy do czynienia z binarnymidecyzjami (typu tak/nie, dziaªaj/nie dziaªaj), i charakteryzuj¡ si¦ tym, »e gdy czynniki forsuj¡ce okre±lon¡decyzj¦ przybieraj¡ na sile, odbiór nowych argumentów, stoj¡cych przeciwko tej decyzji, ma niewielkiwpªyw na sytuacj¦. Kiedy natomiast argumenty za i przeciw podj¦ciu danej decyzji s¡ blisko równowagi,nawet niewielki napªyw nowych argumentów mo»e drastycznie wpªyn¡¢ na decyzj¦ i podj¦cie dziaªania.
W psychologii model tego rodzaju mo»na znale¹¢ w teorii dystrybucji postaw (Latane 1994, za:Nowak). Teoria ta mówi, »e w przypadku ogromnej wi¦kszo±ci kwestii, które maj¡ dla jednostki pom-niejsze znaczenie, rozkªad postaw reprezentowanych przez populacj¦ jest normalny, natomiast w przy-padku bardzo wa»nych dla spoªecze«stwa pyta« i problemów (na przykªad: czy Bóg istnieje), rozkªadpostaw w spoªeczno±ci jest dychotomiczny. Ten fenomen próbuje si¦ wyja±ni¢ wªa±nie poprzez efekt proguw zmianie osobistego podej±cia do spraw wa»nych u czªonka spoªeczno±ci - kiedy argumenty przewa»aj¡w jego osobistym rozrachunku na korzy±¢ jednej z mo»liwo±ci, argumenty przeciwko s¡ konsekwentnieignorowane, co w psychologii spoªecznej nosi szumn¡ nazw¦ efektu zaprzeczania, i jest o�cjalnie uznaneza tzw. bª¡d poznawczy, de�niowany jako �tendencja do krytycznego wery�kowania informacji, którezaprzeczaj¡ dotychczasowym opiniom, przy jednoczesnym bezkrytycznym akceptowaniu informacji, któreje potwierdzaj¡� (Aronson, 2008).
Jednocze±nie, argumenty przemawiaj¡ce za inn¡ opini¡ s¡ ignorowane do momentu, kiedy nie os-i¡gn¡ punktu krytycznego, w którym dramatycznie wpªyn¡ na pogl¡d, cz¦sto zmieniaj¡c go o 180 stopni.W formie anegdoty mog¦ tu przytoczy¢ pytanie, na które napotkaªam podczas egzaminu z psychologiispoªecznej na Wydziale Psychologii UW. Pytanie to brzmiaªo: �Kto jest najwi¦kszym przeciwnikiem SLD?a) zwolennik PiS; b) zwolennik PO; c) zwolennik LPR; d) byªy zwolennik SLD�. Poprawna odpowied¹ tod), a efekt ten jest jedn¡ z konsekwencji szeroko komentowanej w psychologii teorii autopercepcji DarylaBema (Bem, 1967). Oczywi±cie, twórca tej idei, jak i inni socjopsycholodzy jego czasów, nie potra�ª poda¢matematycznego modelu przemawiaj¡cego za opisywanym zjawiskiem, a jego prace opieraªy si¦ jedyniena badaniach empirycznych.
Nieliniowo±¢ charakteryzuje równie» sytuacje, w których wpªyw zmiennej A na zmienn¡ B zale»y odchwilowej warto±ci zmiennej A. Dzieje si¦ tak np. w funkcjach mocy o wykªadnikach mniejszych ni» 1.Kiedy warto±¢ B jest niska, B zareaguje silnie na zmiany w A, ale je±li B jest wysokie, nawet du»e zmianyA maj¡ na« niewielki wpªyw.
W psycho�zyce na przykªad, do±wiadczenie subiektywne jest funkcj¡ mocy bod¹ca, co zostaªo pot-wierdzone zwªaszcza w badaniach nad receptorami sªuchu (Stevens, 1961). Podobn¡ zale»no±¢ obserwujesi¦ w socjologii, w teorii wpªywu spoªecznego - je±li poziom wpªywu jest minimalny, dodanie do grupy jed-nej osoby o zdecydowanych pogl¡dach b¦dzie miaªo do±¢ znaczny wpªyw na opini¦ reszty. Kiedy poziomwpªywu jest relatywnie wysoki, dodanie osoby o okre±lonym stanowisku niewiele wniesie do opinii grupy(Latane, 1981, za: Nowak).
Generalnie, wszystkie zale»no±ci zawieraj¡ce efekt �su�tu� maj¡ natur¦ nieliniow¡. Su�t to sytuacja,w której do pewnej warto±ci B, A powoduje w nim zmiany, natomiast powy»ej tej warto±ci A nie ma ju»wpªywu na B.
1.2.2. Zagadnienia z czynnikiem motywacyjnymNieliniowo±¢ pojawia si¦ równie» w okoliczno±ciach, w których pewna zmienna zmienia znak (z dodat-
niego na ujemny lub odwrotnie) w zale»no±ci od warto±ci innych zmiennych. Najbardziej znan¡ zale»no±ci¡tej postaci jest zale»no±¢ typu �odwrócone U�. Prawo Yerkesa-Dodsona (1908) na przykªad mówi, »e efekty-wno±¢ w wykonywaniu zadania ro±nie wraz z poziomem motywacji do pewnego punktu, a powy»ej niegospada wraz z poziomem motywacji (to znaczy jest pewien optymalny poziom umotywowania, powy»ej
7
którego rezultaty osoby badanej zaczynaj¡ si¦ psu¢, poniewa», kolokwialnie mówi¡c, �chce zbyt mocno�).Rozwa»ania nad t¡ zale»no±ci¡ prowadziª Atkinson (1957, 1964, za: Nowak), który sformuªowaª
teori¦ motywacji osi¡gni¦¢. W tym modelu, warto±¢ przypisywana pojedynczemu celowi, V, wzrastawraz z trudno±ci¡ jego osi¡gni¦cia, i dlatego moze by¢ przedstawiona jako odwrotnie proporcjonalnado prawdopodobie«stwa sukcesu P. Motywacja do osi¡gniecia celu zachowuje si¦ wi¦c jak V ·P czyli jakP (1−P ) = P−P 2. Maksymalne warto±¢ na takiej paraboli wyst¡pi dla P=0.5. Gdy prawdopodobie«stwosukcesu wynosi 0 albo 1, warto±¢ motywacji do osi¡gni¦¢ przyjmie minimum czyli 0.
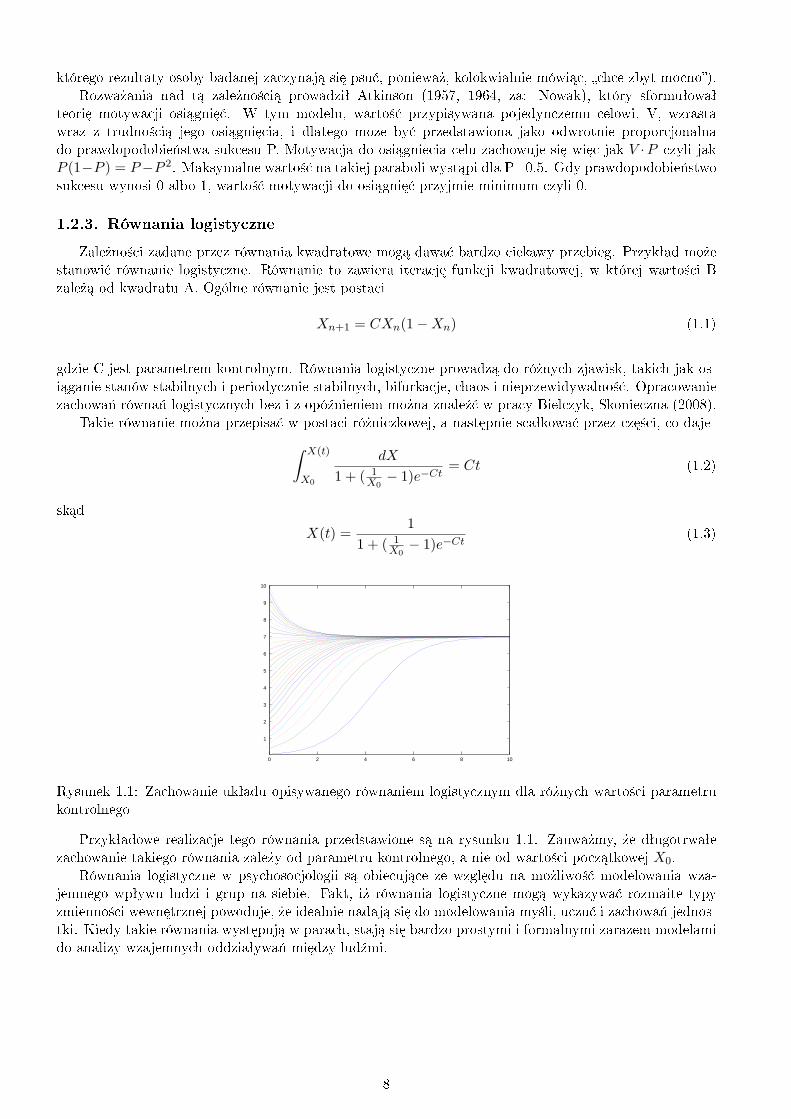
1.2.3. Równania logistyczneZale»no±ci zadane przez równania kwadratowe mog¡ dawa¢ bardzo ciekawy przebieg. Przykªad mo»e
stanowi¢ równanie logistyczne. Równanie to zawiera iteracj¦ funkcji kwadratowej, w której warto±ci Bzale»¡ od kwadratu A. Ogólne równanie jest postaci
Xn+1 = CXn(1−Xn) (1.1)
gdzie C jest parametrem kontrolnym. Równania logistyczne prowadz¡ do ró»nych zjawisk, takich jak os-i¡ganie stanów stabilnych i periodycznie stabilnych, bifurkacje, chaos i nieprzewidywalno±¢. Opracowaniezachowa« równa« logistycznych bez i z opó¹nieniem mo»na znale¹¢ w pracy Bielczyk, Skonieczna (2008).
Takie równanie mo»na przepisa¢ w postaci ró»niczkowej, a nast¦pnie scaªkowa¢ przez cz¦±ci, co daje∫ X(t)
X0
dX
1 + ( 1X0− 1)e−Ct
= Ct (1.2)
sk¡dX(t) =
11 + ( 1
X0− 1)e−Ct
(1.3)
1
2
3
4
5
6
7
8
9
10
0 2 4 6 8 10
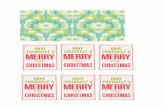
Rysunek 1.1: Zachowanie ukªadu opisywanego równaniem logistycznym dla ró»nych warto±ci parametrukontrolnego
Przykªadowe realizacje tego równania przedstawione s¡ na rysunku 1.1. Zauwa»my, »e dªugotrwaªezachowanie takiego równania zale»y od parametru kontrolnego, a nie od warto±ci pocz¡tkowej X0.
Równania logistyczne w psychosocjologii s¡ obiecuj¡ce ze wzgl¦du na mo»liwo±¢ modelowania wza-jemnego wpªywu ludzi i grup na siebie. Fakt, i» równania logistyczne mog¡ wykazywa¢ rozmaite typyzmienno±ci wewn¦trznej powoduje, »e idealnie nadaj¡ si¦ do modelowania my±li, uczu¢ i zachowa« jednos-tki. Kiedy takie równania wyst¦puj¡ w parach, staj¡ si¦ bardzo prostymi i formalnymi zarazem modelamido analizy wzajemnych oddziaªywa« mi¦dzy lud¹mi.
8
1.2.4. Zjawisko histerezyInnym zjawiskiem, manifestuj¡cym si¦ cz¦sto przy zale»no±ciach nieliniowych i bardzo powszechnym
w psychologii, jest histereza. Zjawisko to mówi, »e zmienna B, zale»na od A, dla danego A mo»e przyj¡¢dwie ró»ne warto±ci, a to, która z warto±ci jest wªa±nie obserwowana, zale»y od historii zmienno±ci B,to jest je±li B przyjmowaªo ostatnio niskie warto±ci, A musi przybiera¢ relatywnie wysokie warto±ci, abyspowodowa¢ wzrost B i na odwrót.
W psychosocjologii histereza zachodzi przy okazji takich zjawisk jak budowanie wra»enia (Asch, 1946),efekt dost¦pno±ci (Jones, 1968) czy perswazja (Miller, 1959). W praktyce oznacza to, »e ludzka opiniacechuje si¦ swego rodzaju bezwªadno±ci¡, i osoba, której prezentuje si¦ pewne stanowisko, inn¡ osob¦czy obiekt, czy któr¡ zapoznaje si¦ z jakim± tematem, b¦dzie potrzebowaªa wi¦cej czasu i argumentównegatywnych, by wróci¢ do swojej opinii pocz¡tkowej ni» osoba otrzymuj¡ca te bod¹ce z pozycji neutralnej.Tzw. p¦tl¦ histerezy mo»na dojrze¢ tak»e na przykªad w sposobie reagowania ludzi na pogod¦ - jesieni¡zakªadaj¡ kurtki przy ni»szej temperaturze ni» je wiosn¡ zdejmuj¡ (Aronson, 2008).
1.3. Analiza ukªadów dynamicznych1.3.1. Przestrze« fazowa
W procesie analizy ukªadu dynamicznego poszukuje si¦ przede wszystkim warunków stabilno±ci, którarozumiana jest jako zjawisko, w którym zmianom w ukªadzie przeciwdziaªaj¡ siªy, które si¦ w nim generuj¡w reakcji na bod¹ce z zewn¡trz. Zjawisko to objawia si¦ powracaniem ukªadu do pewnego stanu w reakcjina niewielkie zaburzenia, spowodowane przez dziaªanie siª z zewn¡trz.
Je±li zmienne dynamiczne w ukªadzie zostaªy zidenty�kowane, traktuje si¦ je jako n-wymiarow¡przestrze« fazow¡. Ka»dy punkt przestrzeni fazowej opisuje inny stan ukªadu, a zmiany czasowe wukªadzie odnosz¡ si¦ do ruchu tego punktu w czasie. Punkt kre±li krzyw¡ w przestrzeni fazowej, a trajek-tori¡ nazywamy drog¦, po której ów punkt si¦ porusza. Ze wzgl¦du na wspomnian¡ wcze±niej konieczno±¢analizowania przebiegu procesów zachodz¡cych w ukªadzie, trajektoria jest poszukiwan¡ wizualizacj¡ za-chowania ukªadu.
W socjologii od przestrzeni fazowej najcz¦±ciej wymaga si¦ jedynie, by byªa przestrzeni¡ stanów, wktórej opis pojedynczego stanu nie musi by¢ kompletny (niektóre zmienne nie musz¡ by¢ reprezentowane,a ró»ne trajektorie mog¡ mie¢ punkty wspólne). Oznacza to, »e znajomo±¢ stanu ukªadu w danej chwili niemusi pozwala¢ na przewidzenie stanu ukªadu w chwili nast¦pnej. Ewolucja ukªadu mo»e by¢ opisana jakozbiór zasad nast¦pstwa stanów, które to reguªy mog¡ by¢ zarówno deterministyczne, jak i stochastyczne.
Jako przykªad zastosowania przestrzeni stanów do psychosocjologii mo»na poda¢ problem d¡»enia-unikania autorstwa Millera (1944, za: Nowak). Wedªug tej teorii, obiekt posiadaj¡cy cechy zarównopo»¡dane, jak i niepo»¡dane, wywoªuje reakcje d¡»enia b¡d¹ unikania, w zale»no±ci od �zycznego i psy-chicznego dystansu do obiektu, poniewa» reakcja na bod¹ce po»¡dane i niepo»¡dane jest niezale»na istanowi inn¡ funkcj¦ owego dystansu. Na przykªad, dziewczynka, której podoba si¦ sukienka na wystawiesklepowej, my±li o swojej upragnionej kreacji gdy znajduje si¦ daleko od sklepu, czuj¡c nieodpart¡ ch¦¢przyjrzenia si¦ upatrzonej sukni. Natomiast gdy tylko podchodzi do wystawy sklepowej, wzbiera w niej»al, »e nie mo»e sobie pozwoli¢ na zakup, a ponadto kusi j¡ surowo wzbroniona kradzie», dyskomfortbierze wi¦c gór¦ nad zachwytem i mªoda osoba odchodzi. Taki scenariusz mo»e si¦ powtarza¢ wielokrot-nie, poniewa» tego dnia przed za±ni¦ciem dziecko znów wyobra»a sobie siebie w sukience, i nast¦pnegoranka znów maszeruje w stron¦ sklepu w nadziei, »e zdarzy si¦ cud i kreacja w niewytªumaczalny sposóbznajdzie si¦ w jej r¦kach.
1.3.2. Rodzaje stabilno±ci, atraktory i bifurkacjeNiech y(t) = [r(t), j(t)] - autonomiczny system dynamiczny (liniowy b¡d¹ nie); y(0) = y0.
1. Je±li rozwi¡zanie ukªadu, o warto±ciach pocz¡tkowych le»¡cych odpowiednio blisko punktu stabilno±ci,pozostaje blisko punktu stabilno±ci dla dowolnego t, mówimy o stabilno±ci w sensie lapunowa. Odpowiadato warunkowi:
∀ε>0∃δ>0 : ||y(0)|| < δ ⇒ ||y(t)|| < ε∀t≥0 (1.4)
9

2. Je±li rozwi¡zanie ukªadu, o warto±ciach pocz¡tkowych le»¡cych blisko punktu stabilno±ci, zbiega dopunktu stabilno±ci, mówimy o stabilno±ci asymptotycznej. Oznacza to, »e ukªad jest stabilny w sensieLapunowa oraz
∃δ>0 : ||y(0)|| < δ ⇒ limt�∞ y(t) = 0 (1.5)
3. Je±li rozwi¡zanie ukªadu jest asymptotycznie stabilne, oraz zbiega do punktu stabilno±ci odpowiednioszybko, to mówimy o eksponencjalnej stabilno±ci. Ukªad taki jest asymptotycznie stabilny oraz
∃α,β,δ>0 : ||y(0)|| < δ ⇒ ||y(t)|| ≤ α||y(0)||e−βt,∀t≥0 (1.6)
Po pewnym czasie (zwanym transient regime) trajektoria ka»dego ukªadu rozproszonego zaczyna za-jmowa¢ pewien podzbiór przestrzeni stanów, nazywany atraktorem. Mo»na tu wyró»ni¢ kilka typówatraktorów.
Atraktor punktowy wyst¦puje wtedy, gdy wszystkie trajektorie zmierzaj¡ do ustalonego punktu, nieza-le»nie od stanu pocz¡tkowego. S¡ dwie podstawowe metody stwierdzania istnienia atraktora punktowego:
a) obserwacja rozkªadu zmiennych dynamicznych w czasie. Je±li przestrze« stanów zaczyna ulega¢ograniczeniom, prawdopodobnie atraktor punktowy istnieje.
b) zaburzanie ukªadu. Je±li ukªad ma atraktor punktowy, to zawsze b¦dzie d¡»y¢ do tego samego stanuw jakim± czasie, niezale»nie od tego, jak bardzo byª zaburzony na pocz¡tku. Zwªaszcza ta metoda jestu»yteczna przy badaniu stabilno±ci w ukªadach opisuj¡cych zjawiska psychologiczne, takie jak formowanieopinii, koncepcji czy rozwój zwi¡zku, poniewa» postawy i cechy charakteru s¡ z de�nicji do±¢ odporne nachwilowe zawahania warunków zewn¦trznych.
Innym typem atraktora jest cykl graniczny, który wyst¦puje, gdy ukªad powraca do ka»dego stanu pookresie t. Jedna przestrze« fazowa mo»e posiada¢ wiele atraktorów tego rodzaju o ró»nych okresach, ato, który okres zostanie zrealizowany, zale»y od warunków pocz¡tkowych. I w ko«cu, atraktor quaziperi-odyczny wyst¡pi, gdy ka»da ze zmiennych dynamicznych posiada periodyczny atraktor, ale ich okresy s¡niewspóªmierne, i caªy ukªad nie wykazuje zachowa« okresowych.
Zachowanie nieliniowego ukªadu nie musi osi¡ga¢ »adnego z tych atraktorów i mo»e by¢ najzupeªniejchaotyczne.
W ukªadach dynamicznych, maªe zmiany warto±ci parametrów kontrolnych mog¡ prowadzi¢ do ogrom-nych zmian jako±ciowych w zachowaniu ukªadu, jak liczba i typ atraktorów. Takie radykalne zmianynazywane s¡ bifurkacjami. Istnieje równie» kilka typów bifurkacji.
Bifurkacja widªowa wyst¦puje, gdy zmiana parametrów kontrolnych w ukªadzie powoduje, ze jeden zatraktorów punktowych dzieli si¦ na dwa. Na przykªad, rozwa»my poziom zaanga»owania w wypracowanieopinii na dany temat jako parametr kontrolny. Je»eli osi¡gnie on odpowiednio wysoki poziom, temat, naktóry opinia si¦ tworzy, b¦dzie na tyle wa»ny, »e opinia zyska tendencj¦ do polaryzacji na �tak� albo �nie�(co ju» byªo wspomniane jako dychotomiczny rozkªad opinii dotycz¡cych spraw wa»nych w populacji, wodró»niniu od rozkªadu Gaussa, który charakteryzuje opinie na tematy maªo wa»ne).
Bifurkacja Hopfa natomiast wyst¡pi, gdy atraktor punktowy przejdzie w cykl graniczny. Takie bi-furkacje uwa»a si¦ za odpowiedzialne za ró»ne procesy �zjologiczne, na przykªad rozwój biaªaczki, którypolega na rozregulowaniu pracy szpiku kostnego, który przyjmuje okresowy i niezale»ny od warunkówzewn¦trznych tryb pracy (Skonieczna, 2008). Natomiast jako przykªad z dziedziny psychosocjologiimo»emy poda¢ par¦ maª»e«sk¡, która wypracowaªa zdolno±¢ osi¡gania dªu»szych stanów równowagi mimoprzej±ciowych sporów, co, jak mo»emy przyj¡¢, stanowi atraktor punktowy (kªótnie s¡ tu zwykªymizaburzeniami, którym ukªad si¦ opiera zgodnie z powy»ej przytoczon¡ de�nicj¡ atraktora punktowego).Napi¦cia spowodowane przez warunki zewn¦trzne mog¡ jednak nagle przyj¡¢ punkt krytyczny, w którymosi¡ganie równowagi przestanie by¢ mo»liwe i para zacznie oscylowa¢ pomi¦dzy przeplataj¡cymi si¦ okre-sami miªo±ci i nienawi±ci, co stanowi cykl graniczny.
I w ko«cu, mo»liwe s¡ jeszcze tzw. bifurkacje podwojonego okresu, w których cykl graniczny stajesi¦ niestabilny i jest zast¦powany przez nowy, o okresie dwa razy wi¦kszym (na przykªad w równaniachlogistycznych przy pewnych warto±ciach parametru kontrolnego C).
W tej pracy b¦dziemy rozwa»a¢ warunki stabilno±ci asymptotycznej dla liniowych i nieliniowychukªadów z opó¹nieniem, oraz warto±ci opó¹nie«, dla których nast¦puje bifurkacja Hopfa.
10

1.4. Ukªady dynamiczne w modelowaniu relacji mi¦dzyludzkichRelacje mi¦dzyludzkie w naturalny sposób skupiaj¡ na sobie uwag¦ psychosocjologów i byªy wielokotnie
poddawane analizie, jednak jak do tej pory opisuj¡ce je ukªady równa« ró»niczkowych zwyczajnych niezawieraªy opó¹nienia.
Modele te zakªadaj¡, »e zachowanie ka»dego z partnerów jest konsekwencj¡ zachowania obojga, orazpersonalnych celów. Najbardziej popularne s¡ modele liniowe, w których wprowadza si¦ zmienne takiejak �cele, preferencje i ideaªy� obojga partnerów (r∗, j∗), czyli stan, do którego partnerzy wolicjonalnied¡»¡ (Felmlee, 1999). Równania opisujace taki systam wygl¡daj¡ nast¦puj¡co:
{r(t) = a11[r∗ − r(t)] + a12[j(t)− r(t)]j(t) = a21[j∗ − j(t)] + a22[r(t)− j(t)]
(1.7)
Zmienne r(t) i j(t) oznaczaj¡ chwilowy stan samopoczucia danej osoby. W tym modelu zakªada si¦,»e a11 i a21 s¡ dodatnie, co implikuje, »e je±li chwilowy stan partnera jest gorszy ni» jego osobisty ideaª,motywuje go/j¡ to do poprawy tego stanu, natomiast je±li jest lepszy - przeciwnie, sytuacja ta ma wkªadujemny do samopoczucia w kolejnych chwilach.
Rozwi¡zania takiego ukªadu zachowuj¡ si¦ jak oscylator harmoniczny, a wszelkie przypadki, gdy takiukªad jest stabilny (czyli gdy oscylator jest tªumiony), opisano w kolejnym rozdziale. Analiz¦ jako±-ciow¡, przeprowadzon¡ przez socjologów akademickich, mo»na znale¹¢ we wspomnianych materiaªach¹ródªowych.
W pracy rozszerzymy powy»szy ukªad o czªony z pewnym opó¹nieniem τ i przeanalizujemy mo»liwepodtypy tego ukªadu ze wgl¦du na liczb¦ i rozmieszczenie opó¹nienia.
Poka»emy te» zjawisko asymptotycznej stabilno±ci na przykªadzie dwóch modeli nieliniowych.
11


Rozdziaª 2
Model dynamiczny zwi¡zku Romea i Julii zopó¹nieniem
2.1. Model liniowyProblem zwi¡zku i satysfakcji z niego czerpanej jest bardzo trudny do zoperacjonalizowania. Aby
prze±ledzi¢ jego przebieg, mo»na wprowadzi¢ jednak arbitralnie zmienne, oznaczaj¡ce zmienny w czasiestan zadowolenia ze zwi¡zku. Mamy tu zamiar modelowa¢ poziom zadowolenia partnerów, pªyn¡cego zrelacji mi¦dzy nimi, a nie ogólny stan szcz¦±liwo±ci w »yciu, zatem wªa±ciwe wydaje si¦ nazwanie tegostanu satysfakcj¡ (w zwi¡zku) raczej ni» samopoczuciem. Taki stan mo»e mie¢ warto±¢ dodatni¡ lubujemn¡, zale»nie od tego, czy dan¡ osob¦ mo»na scharakteryzowa¢ jako usatysfakcjonowan¡ (szcz¦±liw¡w zwi¡zku), lub nieusatysfakcjonowan¡ (nieszcz¦±liw¡ w zwi¡zku). Partnerzy w zwi¡zku przejawiaj¡ te»ró»ne cechy osobnicze, które uwzgl¦dnimy, wprowadzaj¡c parametry.
Rozwa»my wi¦c zwi¡zek pomi¦dzy dwojgiem partnerów, Romeem1 (r) i Juli¡ (j), w którym ka»de zpartnerów ma tendencj¦ do przemy±lania wªasnych i partnera stanów emocjonalnych.
Ogólna posta¢ ukªadu równa« w przypadku liniowym jest nast¦puj¡ca:{
r(t) = a11r(t− τ1) + a12j(t− τ2) + a13r(t) + a14j(t) + a15
j(t) = a21r(t− τ3) + a22j(t− τ4) + a23r(t) + a24j(t) + a25(2.1)
Wida¢ wyra¹nie, »e jest to nic innego, jak rozszerzenie modelu 1.7 o czªony zawieraj¡ce opó¹nienie.W dalszej cz¦±ci pracy zawsze b¦dziemy zakªada¢ ai5 = 0 dla i ∈ {1, 2}2.
Zaczniemy od najprostszych przypadków bez opó¹nienia, a w dalszej kolejno±ci wprowadzimy opó¹nie-nie w ró»nych kon�guracjach, by na koniec przeanalizowa¢ model liniowy w mo»liwie ogólnej postaci orazzasymulowa¢ ten model numerycznie dla ró»nych opó¹nie«.
Pytanie, jakie b¦dziemy sobie stawia¢, b¦dzie za ka»dym razem to samo: dla jakich warto±ci charak-teryzuj¡cych partnerów parametrów modelu 2.1, oraz dla jakich warto±ci ewentualnego opó¹nienia τ tenzwi¡zek stanie si¦ asymptotycznie stabilny, dla jakich warto±ci nast¡pi¡ oscylacje (np. w wyniku bifurkacjiHopfa), a kiedy z kolei warto±ci r(t) i j(t) zaczn¡ si¦ rozbiega¢ do niesko«czono±ci, co w praktyce oznaczazerwanie wi¦zi3.
2.1.1. Budujemy model liniowy z opó¹nieniem od pocz¡tku czyli równania oscylatoraRozwa»my Juli¦, która reaguje na stany emocjonalne Romea z pewnym wspóªczynnikiem reaktywno±ci
i bez opó¹nienia, oraz Romea, który reaguje na stany emocjonalne Julii z innym wspóªczynnikiem, równie»bez opó¹nienia. Jest to przypadek, w którym a11 = a13 = a14 = a22 = a23 = a24 = 0, τ2 = τ3 = 0.
1Wedªug Wielkiego Sªownika Ortogra�cznego PWN: Romeo (imi¦; posta¢) -mea, -meowi, -meem, Ms. -meo2Wyrazy te jedynie zmieniaj¡ warto±¢ rozwi¡zania stacjonarnego, natomiast nie maj¡ wpªywu na to, czy ukªad jest
asymptotyczne zbie»ny do tego rozwi¡zania, czy te» nie. W stosunku do modelu 1.7 czªony te odpowiadaj¡ czªonom a11r∗ i
a21j∗ odpowiednio, a wi¦c staªym wyra»aj¡cym idealny stan, do którego d¡»¡ partnerzy, wzi¦ty z pewnymi wagami.
3Je±li przynajmniej jedna z warto±ci r(t) i j(t) zd¡»a do −∞, mo»na spokojnie przyj¡¢, »e w rzeczywisto±ci prowadzi todo zerwania zwi¡zku, natomiast je±li przynajmniej jedna z tych warto±ci zd¡»a do +∞, a druga do +infty albo do staªejdodatniej, mo»na przypuszcza¢, »e w rzeczywisto±ci zako«czyªoby si¦ to ±lubem, po którym warto±ci wspóªczynników modelumog¡ si¦ zasadniczo zmieni¢ i zdarzy¢ si¦ mo»e wszystko...
13
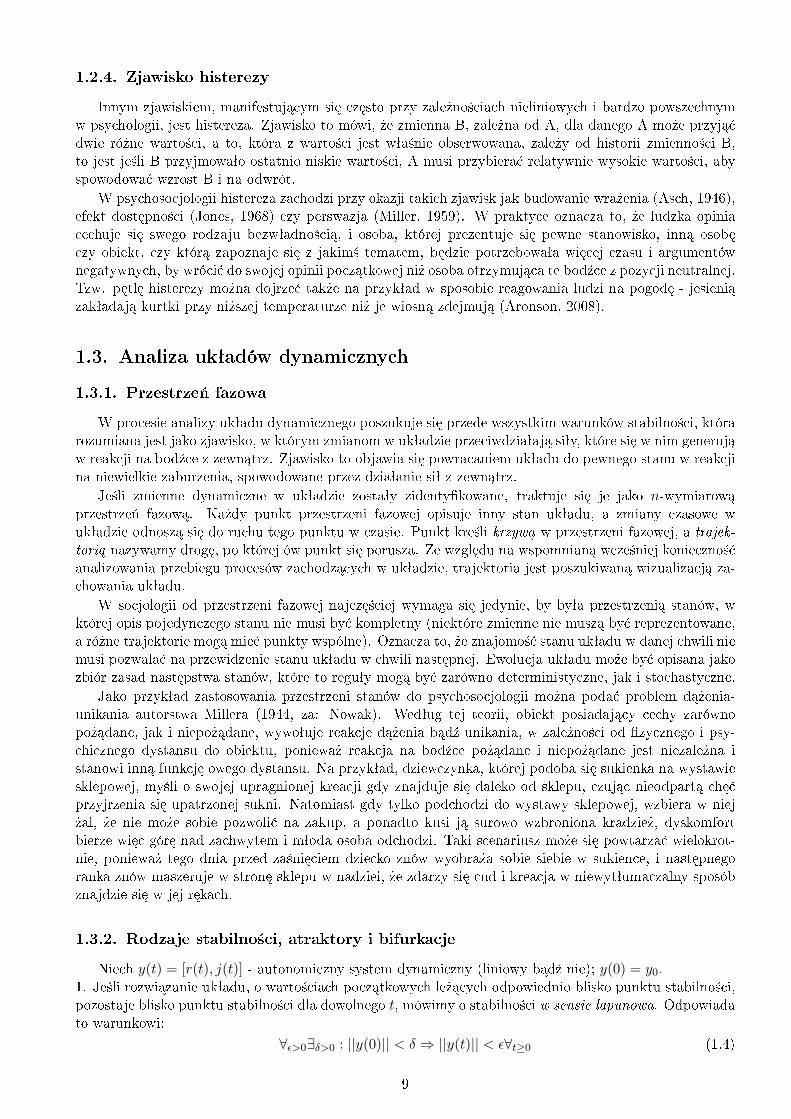
Zauwa»my, »e je±li wspóªczynniki a12 i a21 s¡ tego samego znaku, ukªad b¦dzie niestabilny, a warto±cir(t) i j(t) b¦d¡ rosªy eksponencjalnie. Poszukujemy przypadków stabilnych, rozpatrzmy wi¦c ukªad
{r(t) = a12j(t)j(t) = −a21r(t)
(2.2)
gdzie a12, a21 > 0.Jest ukªad, dla którego przy warunku pocz¡tkowym r(0) = j(0) = 1 dostajemy rozwi¡zanie:
{r(t) = a12
ω sin(ωt)− cos(ωt)j(t) = cos(ωt)− a21
ω sin(ωt),(2.3)
gdzie ω =√
a12a21. Rozwi¡zanie dla przypadku stabilnego pokazano na rysunku 2.1, dla niestabilnego -na rysunku 2.2.
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
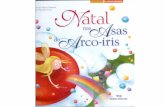
Rysunek 2.1: Rozwi¡zanie oscylatora harmonicznego dla a12 = a21 = 1, wraz z portretem fazowym
0 0.5 1 1.50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 0.5 1 1.5 2 2.5
x 104
0
0.5
1
1.5
2
2.5x 10
4
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
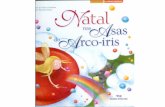
Rysunek 2.2: Rozwi¡zanie ukªadu 2.3 dla a12 = 1, a21 = −1, wraz z portretem fazowym
2.1.2. Równania oscylatora z jednym opó¹nieniemZbudujmy podobny ukªad, o takich samych parametrach, z pojedynczym opó¹nieniem τ3 := τ :
{r(t) = a12j(t)j(t) = −a21r(t− τ)
(2.4)
gdzie a12, a21 > 0.Podstawmy w drugim równaniu t := t + τ . Wówczas dostajemy j(t + τ) = −a21r(t) ⇒ j(t + τ) =
−a21r(t) = −ω2j(t), dla ω =√
a12a21. Podstawiaj¡c znów t := t− τ , otrzymujemy równanie ró»niczkowezwyczajne drugiego rz¦du z jednym opó¹nieniem:
j(t) = −ω2j(t− τ) (2.5)
14

Mo»na pokaza¢, »e ukªad ma rozwi¡zanie tylko dla okre±lonych τ . Poszukujemy rozwi¡za« oscylacyjnychpostaci {
r(t) = eiω1t
j(t) = eiω2t
Po wstawieniu do ukªadu dostajemy{
iω1a12
= ei(ω2−ω1)t
− iω2a21
= ei(ω1(t−τ)−ω2t) = e−i(ω2−ω1)te−iω1τ
Po przemno»eniu stronami dostajemy − ω1ω2a12a21
= e−iω1τ . Lewa strona jest rzeczywista, prawa - zespolona,zatem jedyne rozwi¡zanie stabilne daje τ = 0 + 2kπ
ω , dla funkcji pocz¡tkowej na przedziale (−τ, 0]równej [cos(ωt), sin(ωt)], gdzie ω =
√a12a21 i wynosi r(t) = cos(ωt), j(t) = sin(ωt), oraz odpowiednio
r(t) = sin(ωt), j(t) = cos(ωt) dla funkcji pocz¡tkowej [sin(ωt), cos(ωt)]. Rozwi¡zania w przypadkustabilnym i niestabilnym pokazano na rysunkach poni»ej:
0 2 4 6 8 10−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1τ = 2*π
pozi
om s
atys
fakc
ji
czas
RomeoJulia
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5τ = 2π
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.3: Rozwi¡zanie oscylatora z jednym opó¹nieniem dla a12 = 1, a21 = 1, f0 = [sin(t), cos(t)] -przypadek stabilny
0 2 4 6 8 10−30
−20
−10
0
10
20
30
40
50τ = pi/2
pozi
om s
atys
fakc
ji
czas
RomeoJulia
−30 −20 −10 0 10 20−20
−10
0
10
20
30
40
50τ = pi/2
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.4: Rozwi¡zanie oscylatora z jednym opó¹nieniem dla a12 = 1, a21 = 1, f0 = [sin(t), cos(t)] -przypadek niestabilny
W ±wietle teorii psychologicznych mo»emy powiedzie¢, »e ten model jest zbyt prosty. W ogólnymprzypadku nie daje on rozwi¡za«, podczas gdy wiemy doskonale, »e istnieje pewien procent zwi¡zkówtrwaªych, które przerywa dopiero ±mier¢ jednego z partnerów, i nie jest to w spoªecze«stwie ewenement.Nale»y wi¦c szuka¢ nadal i stara¢ si¦ znale¹¢ taki model, by zbiór potrzebnych do stabilno±ci opó¹nie«nie byª miary zero.
15

2.1.3. Równania oscylatora z jednym opó¹nieniem w dwóch miejscachTym razem dodajmy do ukªadu równa« opó¹nienie w drugim miejscu:
{r(t) = a12j(t− τ2)j(t) = −a21r(t− τ3)
(2.6)
gdzie a12, a21 > 0.Po przeksztaªceniach analogicznych do oblicze« z punktu 2.1.2, otrzymujemy równanie
j(t) = −ω2j(t− (τ2 + τ3)) (2.7)
Rozwi¡zanie jak poprzednio, tym razem dla τ ′ := τ2 + τ3. Podobnie, jedynym mo»liwym oscylatoremjest [r(t), j(t)] = [sin(ωt), cos(ωt)], dla f0 = [sin(ωt), cos(ωt)] i dla τ ′ = 0 + 2kπ
ω , oraz odpowiednio[r(t), j(t)] = [cos(ωt), sin(ωt)], dla f0 = [cos(ωt), sin(ωt)], i dla takiego samego τ . Jest to ciekawy wniosek,mówi¡cy o tym, »e aby ukªad mógª by¢ stabilny dla danych parametrów al2, a21, szczególn¡ posta¢ musimie¢ suma warto±ci opó¹nie« Romea i Julii, a nie ka»de z tych opó¹nie« z osobna. Nie zmienia to jednakfaktu, »e jest to bardzo szczególny przypadek, a w ogólno±ci stabilno±ci nie ma.
2.1.4. Równania oscylatora z tªumieniemTym razem rozwa»ymy równania, dla których τi = 0 dla i ∈ {1, 2, 3, 4} oraz a13 = a14 = a23 = a24 = 0.
Dostajemy ukªad postaci {r(t) = a11r(t) + a12j(t)j(t) = a21r(t) + a22j(t)
(2.8)
Wielomian charakterystyczny ukªadu 2.8 dla τ = 0 wynosi w(λ) = λ2 − (a11 + a22)λ + a11a22 − a12a21.Mo»na tutaj rozpatrzy¢ nast¦puj¡ce przypadki:1. Je±li ∆(w(λ)) > 0, czyli (a11 + a22)2 − 4(a11a22 − a21a12) > 0, to pierwiastki tego wielomianu λ1, λ2
s¡ rzeczywiste, a rozwi¡zanie ma posta¢{
r(t) = A1eλ1t + A2e
λ2t
j(t) = B1eλ1t + B2e
λ2t
dla dowolnych A1, A2, B1, B2 ∈ <.oraz aby ukªad d¡»yª do punktu stabilnego, który mo»e w tym wypadku wynosi¢ jedynie (0, 0), musi zaj±¢λ1, λ2 < 0, czyli {
a11+a22−√
∆2 < 0
a11+a22+√
∆2 < 0
sk¡d dwa przypadki:a) a11 + a22 ≥ 0 ⇒ nie ma rozwi¡za«;b) a11 + a22 < 0 ⇒ √
∆ ∈ (−|a11 + a22|, +|a11 + a22|). Wówczas ∆ < (a11 + a22)2 ⇒ (a11 + a22)2 −4(a11a22−a21a12) < (a11+a22)2 ⇒ −4(a11a22−a21a12) < 0. St¡d ju» a11a22−a21a12 > 0, co w poª¡czeniuz rozpisanym warunkiem ∆ > 0 daje ukªad
a11 + a22 < 0(a11 − a22)2 + 4a12a21 > 0a11a22 − a21a12 > 0
(2.9)
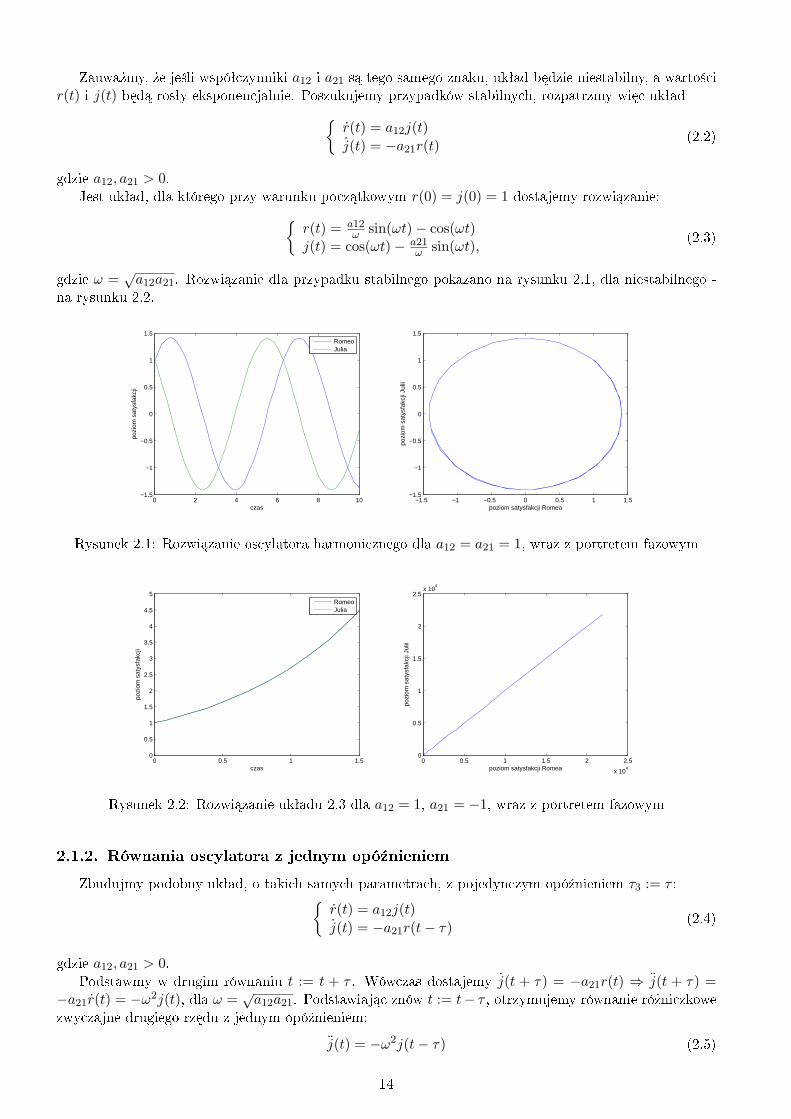
Jest to przypadek tzw. oscylatora nadtªumionego. Na rys. 2.5 pokazano przykªad ewolucji takiegoukªadu.
2. W przypadku ∆ = 0 ⇒ (a11 + a22)2 − 4(a11a22 − a21a12) = 0, ukªad ma podwójn¡ warto±¢ wªasn¡λ i rozwi¡zanie postaci {
r(t) = A1eλt + A2te
λt
j(t) = B1eλt + B2te
λt
16
0 1 2 3 4 5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1 −0.8 −0.6 −0.4 −0.2 0 0.2−0.2
0
0.2
0.4
0.6
0.8
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.5: Rozwi¡zanie oscylatora nadtªumionego dla a11 = −4, 83, a12 = −0, 11, a21 = 4, 17, a22 =−0, 90 wraz z portretem fazowym
0 5 10 15 20 25 30−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1 −0.8 −0.6 −0.4 −0.2 00
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.6: Rozwi¡zanie oscylatora w przypadku krytycznym dla a11 = −4, 05, a12 = −4, 01, a21 = 3, 67,a22 = 3, 60 wraz z portretem fazowym
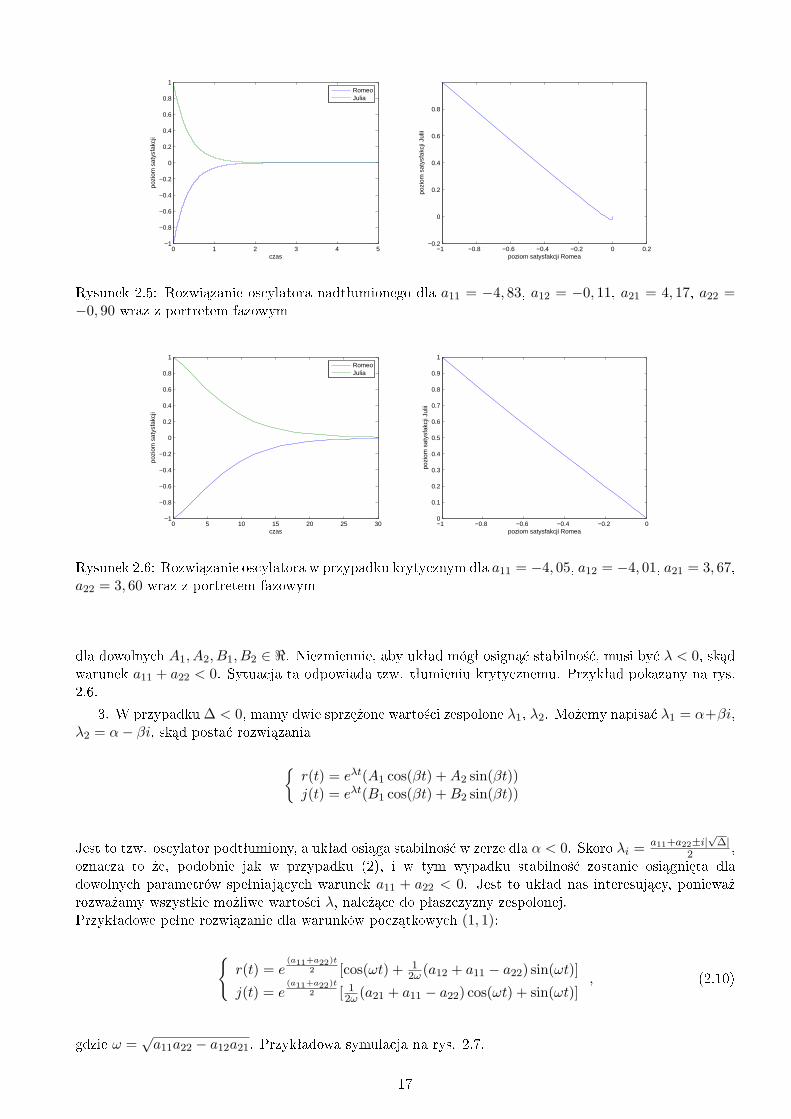
dla dowolnych A1, A2, B1, B2 ∈ <. Niezmiennie, aby ukªad mógª osign¡¢ stabilno±¢, musi by¢ λ < 0, sk¡dwarunek a11 + a22 < 0. Sytuacja ta odpowiada tzw. tªumieniu krytycznemu. Przykªad pokazany na rys.2.6.
3. W przypadku ∆ < 0, mamy dwie sprz¦»one warto±ci zespolone λ1, λ2. Mo»emy napisa¢ λ1 = α+βi,λ2 = α− βi, sk¡d posta¢ rozwi¡zania
{r(t) = eλt(A1 cos(βt) + A2 sin(βt))j(t) = eλt(B1 cos(βt) + B2 sin(βt))
Jest to tzw. oscylator podtªumiony, a ukªad osi¡ga stabilno±¢ w zerze dla α < 0. Skoro λi = a11+a22±i|√∆|2 ,
oznacza to »e, podobnie jak w przypadku (2), i w tym wypadku stabilno±¢ zostanie osi¡gni¦ta dladowolnych parametrów speªniaj¡cych warunek a11 + a22 < 0. Jest to ukªad nas interesuj¡cy, poniewa»rozwa»amy wszystkie mo»liwe warto±ci λ, nale»¡ce do pªaszczyzny zespolonej.Przykªadowe peªne rozwi¡zanie dla warunków pocz¡tkowych (1, 1):
{r(t) = e
(a11+a22)t2 [cos(ωt) + 1
2ω (a12 + a11 − a22) sin(ωt)]
j(t) = e(a11+a22)t
2 [ 12ω (a21 + a11 − a22) cos(ωt) + sin(ωt)]
, (2.10)
gdzie ω =√
a11a22 − a12a21. Przykªadowa symulacja na rys. 2.7.
17

0 1 2 3 4 5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1 −0.8 −0.6 −0.4 −0.2 0 0.2−0.2
0
0.2
0.4
0.6
0.8
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.7: Rozwi¡zanie oscylatora podtªumionego dla a11 = −0, 09, a12 = 0, 77, a21 = −1, 65, a22 =−1, 61 wraz z portretem fazowym
2.1.5. Równania oscylatora z tªumieniem i opó¹nieniemOpó¹nienie w jednym miejscu, typ I
Tym razem zakªadamy, »e τ1 > 0, i niech τ1 := τ . Zatem mamy ukªad{
r(t) = a11r(t− τ) + a12j(t)j(t) = a21r(t) + a22j(t)
(2.11)
Zakªadamy jeszcze dodatkowo, »e a11 + a22 6= 0 oraz a11a22 − a12a21 6= 0.Ukªad ten przeanalizujemy, posªuguj¡c si¦ analiz¡ warto±ci τ , przy których nast¦puje zmiana stabilno±ci,na podstawie pracy Cooke'a (1986).
Zgodnie z metod¡, najpierw rozpatrujemy stabilno±¢ dla τ = 0. Jak ªatwo zauwa»y¢, jest to przypadekidentyczny jak przypadek z poprzedniego podrozdziaªu, a wi¦c stabilno±¢ uzyskujemy dla wszystkich przy-padków tªumienia (poniewa» w ka»dym z tych przypadków rozwi¡zania wielomianu charakterystycznegomaj¡ cz¦±¢ rzeczywist¡ ujemn¡), zatem gdy
{a11 + a22 < 0a11a22 − a12a21 > 0
(2.12)
W ka»dym innym przypadku, to jest dodatniego opó¹nienia τ , stabilno±¢ ukªad osi¡ga wtedy, gdy cz¦±¢rzeczywista rozwi¡za« λi jest mniejsza od zera, dla i ∈ {1, 2}. Warto±ci wªasne zale»¡ w sposób ci¡gªy odparametrów modelu, w szczególno±ci od opó¹nienia.
Je±li istnieje taka warto±¢ τ0, dla której λi = ±iω0 (pierwiastki wielomianu charakterystycznego le»¡na osi urojonej), to ukªad mo»e si¦ destabilizowa¢, a je±li dodatkowo d
dτ Re(λi)|τ=τ0 > 0 dla dowolnegoi ∈ {1, 2}, to który± z pierwiastków wielomianu charakerystycznego przechodzi na praw¡ póªpªaszczyzn¦zespolon¡, i ukªad istotnie si¦ destabilizuje.Wielomian charakterystyczny tego ukªadu dla τ > 0 ma posta¢
w(λ) = λ2 − a22λ− a12a21 + e−λτ (a11a22 − λa11) (2.13)
Kiedy mo»e by¢ λ = iω? Wtedy, gdy 0 = −iω2− iωa22−a12a21 + e−iωτ (a11a22− iωa11), co z kolei mo»nazapisa¢ jako iω2 + iωa22 + a12a21 = e−iωτ (a11a22 − iωa11), po czym porówna¢ moduªy, sk¡d wynika
|ω2 + a12a21 + iωa22|2 = |a11a22 − iωa11|2
18

Mo»emy tutaj wprowadzi¢ funkcj¦ F (ω), której miejsca zerowe b¦dziemy bada¢, równ¡
F (ω)= (ω + a12a21)2 + ω2a2
22 − ω2a211 − a11a
222
= ω4 + ω2(a222 − a2
11 + 2a12a21) + a212a
221 − a2
11a222
= y2 + y(a222 − a2
11 + 2a12a21) + a212a
221 − a2
11a222,
gdzie ω jest miejscem zerowym tej funkcji tylko gdy F (y) = 0 dla y = ω2 i y > 0.Delta funkcji kwadratowej F (y) wynosi ∆(F (y)) = (a2
11 + a222)
2 + 4a12a21(a222 − a2
11) i potrzebny jestwarunek ∆(F (y)) > 0, poniewa» w przypadku ∆(F (y)) < 0 nie ma w ogóle rozwi¡za«, a w przypadku∆(F (y)) = 0 przeanalizowanie ukªadu t¡ metod¡ jest bardzo trudne.Rozwa»my dwa przypadki:
a) je±li |a12a21| < |a11a22|, to wyraz wolny fukcji F (y) jest ujemny, a wi¦c F (0) < 0. Jest to funkcjakwadratowa o dodatnim wspóªczynniku kierunkowym, której zbiorem argumentów jest o± urojona, dlategona dodatniej póªosi urojonej ma ona jedynie jeden pierwiastek y0, a zatem tylko jedn¡ par¦ rozwi¡za«±iω0 dla ω0 =
√y0. S¡ to rozwi¡zania symetryczne wzgl¦dem osi rzeczywistej powierzchni zespolonej, w
takich przypadkach mo»na si¦ wi¦c ograniczy¢ do rozwa»ania póªpªaszczyzny o dodatniej cz¦±ci urojonej.B¦dziemy wi¦c odt¡d rozwa»a¢ jeden pierwiastek urojony pseudowielomianu, równy +
√y0. Punkt y0 ma
warto±¢ 12 [−(a2
22 − a211 + 2a12a21) +
√∆(F (y))], a pochodna w tym punkcie: F ′(y0) = 2y0 + a2
22 − a211 +
2a12a21 =√
∆(F (y)) > 0. Z twierdzenia pochodz¡cego z pracy Skoniecznej, Fory± (2009), pochodnafunkcji F (y) w danym punkcie ma ten sam znak, co pochodna warto±ci pseudowielomianu po czasie,tzn. ∂Re[w(iω)]
∂τ |ω=iy. Dlatego, je±li w punkcie y0, le»¡cym na osi urojonej, pochodna funkcji F ′(y0) jestdodatnia, to odpowiadaj¡cy jej pierwiastek urojony pseudowielomianu przechodzi z lewej póªpªaszczyznyzespolonej na praw¡ i odwrotnie - je±li ta pochodna jest ujemna, pierwiastek przemieszcza si¦ z prawejstrony na lew¡. Zatem w tym przypadku:
1) je±li ukªad jest niestabilny dla τ = 0 (gdy nie zachodzi »adne z tªumie« oscylatora, opisanych wpoprzednim podrozdziale, czyli gdy a11a22−a12a21 < 0 lub a11+a22 > 0), oznacza to, »e pseudowielomianw stanie stacjonarnym znajduje si¦ po prawej stronie rozwa»anej póªpªaszczyzny. Jednak mamy tylkojedn¡ par¦ czysto urojonych warto±ci pseudowielomianu (jedn¡ warto±¢ dodatni¡ i jedn¡ warto±¢ do niejprzeciwn¡), i w obu punktach pochodna odpowiadaj¡cej funkcji F (y) jest dodatnia, wi¦c w tych punktachmo»liwe jest przej±cie jedynie z lewej strony na praw¡. Dlatego tutaj pseudowielomian, który rozpoczynapodró» po pªaszczy¹nie zespolonej z prawej strony, nie ma szansy przej±¢ na drug¡ stron¦ osi urojonej, iukªad pozostanie niestabilny dla ka»dego τ .
2) je±li ukªad jest stabilny dla τ = 0, czyli a11a22− a12a21 > 0 oraz a11 + a22 < 0, to pseudowielomianstartuje z lewej strony pólpªaszczyzny zespolonej i istnieje takie krytyczne τc, dla którego zachodzi bi-furkacja Hopfa, a powy»ej tej warto±ci ukªad si¦ destabilizuje. Zauwa»my, »e kiedy rozwi¡zanie przejdziena praw¡ stron¦ póªpªaszczyzny zespolonej, nie ma ju» szansy powrotu, a zatem taka zmiana jest trwaªa.Niech ω0 =
√y0, gdzie y0 - jedyny pierwiastek dodatni funkcji F (y). Wówczas bifurkacja nast¡pi dla
najmniejszego τ , które speªnia w(iω0) = 0, czyli dla najmniejszej warto±ci τ takiej, »e Re[w(iω0)] iIm[w(iω0)] s¡ równe 0:
{Re[w(iω0)] = 0 = −ω2
0 − a12a21 − a11ω0 sin(ω0τ) + a11a22 cos(ω0τ)Im[w(iω0)] = 0 = −a22ω0 − a11a22 sin(ω0τ)− a11ω0 cos(ω0τ),
czyli dla
τc =1ω0
arccos[a12a21a22
a11(ω20 + a2
22)]
oraz ω0 = (12(a2
11 − a222 − 2a12a21 + ((a2
11 + a222)
2 + 4a12a21(a222 − a2
11))12 )
12 ,
pod warunkiem sin(ω0τc) =−ωj(ω
2j +a2
22+a21a12)
a11(ω2j +a2
22)> 0, oraz 2π − τc w przeciwnym przypadku.
19
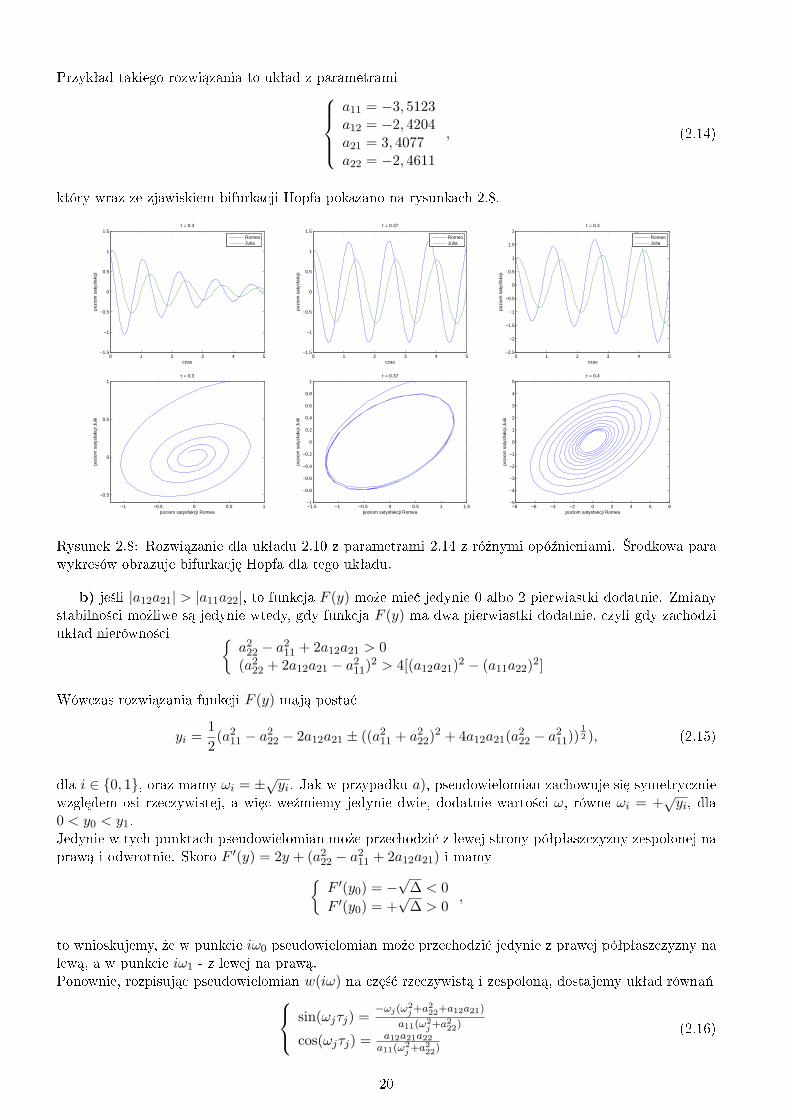
Przykªad takiego rozwi¡zania to ukªad z parametrami
a11 = −3, 5123a12 = −2, 4204a21 = 3, 4077a22 = −2, 4611
, (2.14)
który wraz ze zjawiskiem bifurkacji Hopfa pokazano na rysunkach 2.8.
0 1 2 3 4 5−1.5
−1
−0.5
0
0.5
1
1.5τ = 0.3
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 1 2 3 4 5−1.5
−1
−0.5
0
0.5
1
1.5τ = 0.37
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 1 2 3 4 5−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 0.4
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1 −0.5 0 0.5 1
−0.5
0
0.5
1τ = 0.3
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1.5 −1 −0.5 0 0.5 1 1.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1τ = 0.37
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−8 −6 −4 −2 0 2 4 6 8−5
−4
−3
−2
−1
0
1
2
3
4
5τ = 0.4
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.8: Rozwi¡zanie dla ukªadu 2.10 z parametrami 2.14 z ró»nymi opó¹nieniami. �rodkowa parawykresów obrazuje bifurkacj¦ Hopfa dla tego ukªadu.
b) je±li |a12a21| > |a11a22|, to funkcja F (y) mo»e mie¢ jedynie 0 albo 2 pierwiastki dodatnie. Zmianystabilno±ci mo»liwe s¡ jedynie wtedy, gdy funkcja F (y) ma dwa pierwiastki dodatnie, czyli gdy zachodziukªad nierówno±ci {
a222 − a2
11 + 2a12a21 > 0(a2
22 + 2a12a21 − a211)
2 > 4[(a12a21)2 − (a11a22)2]
Wówczas rozwi¡zania funkcji F (y) maj¡ posta¢
yi =12(a2
11 − a222 − 2a12a21 ± ((a2
11 + a222)
2 + 4a12a21(a222 − a2
11))12 ), (2.15)
dla i ∈ {0, 1}, oraz mamy ωi = ±√yi. Jak w przypadku a), pseudowielomian zachowuje si¦ symetryczniewzgl¦dem osi rzeczywistej, a wi¦c we¹miemy jedynie dwie, dodatnie warto±ci ω, równe ωi = +
√yi, dla
0 < y0 < y1.Jedynie w tych punktach pseudowielomian mo»e przechodzi¢ z lewej strony póªpªaszczyzny zespolonej napraw¡ i odwrotnie. Skoro F ′(y) = 2y + (a2
22 − a211 + 2a12a21) i mamy
{F ′(y0) = −√∆ < 0F ′(y0) = +
√∆ > 0
,
to wnioskujemy, »e w punkcie iω0 pseudowielomian mo»e przechodzi¢ jedynie z prawej póªpªaszczyzny nalew¡, a w punkcie iω1 - z lewej na praw¡.Ponownie, rozpisuj¡c pseudowielomian w(iω) na cz¦±¢ rzeczywist¡ i zespolon¡, dostajemy ukªad równa«
sin(ωjτj) =−ωj(ω
2j +a2
22+a12a21)
a11(ω2j +a2
22)
cos(ωjτj) = a12a21a22
a11(ω2j +a2
22)
(2.16)
20
sk¡dτj0 =
1ωj
arccos[a12a21a22
a11(ω2j + a2
22)],
gdy sin(ωjτj0) =−ωj(ω
2j +a2
22+a12a21)
a11(ω2j +a2
22)> 0, oraz 2π − 1
ωjarccos[ a12a21a22
a11(ω2j +a2
22)] w przeciwnym przypadku.
Funkcje trygonometryczne s¡ okresowe, zatem otrzymujemy dwa ci¡gi czasów, dla których pseudowielo-mian mo»e przekracza¢ o± urojon¡:
τjn = τj0 +2nπ
ωj, (2.17)
dla n ∈ N .Tutaj równie» wyst¦puj¡ dwa przypadki:
0 2 4 6 8 10−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2τ = 0.35
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10−1
−0.5
0
0.5
1
1.5τ = 0.39
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5τ = 0.45
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1τ = 0.35
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1 1.5−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1τ = 0.39
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−5 0 5−4
−3
−2
−1
0
1
2
3
4τ = 0.45
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
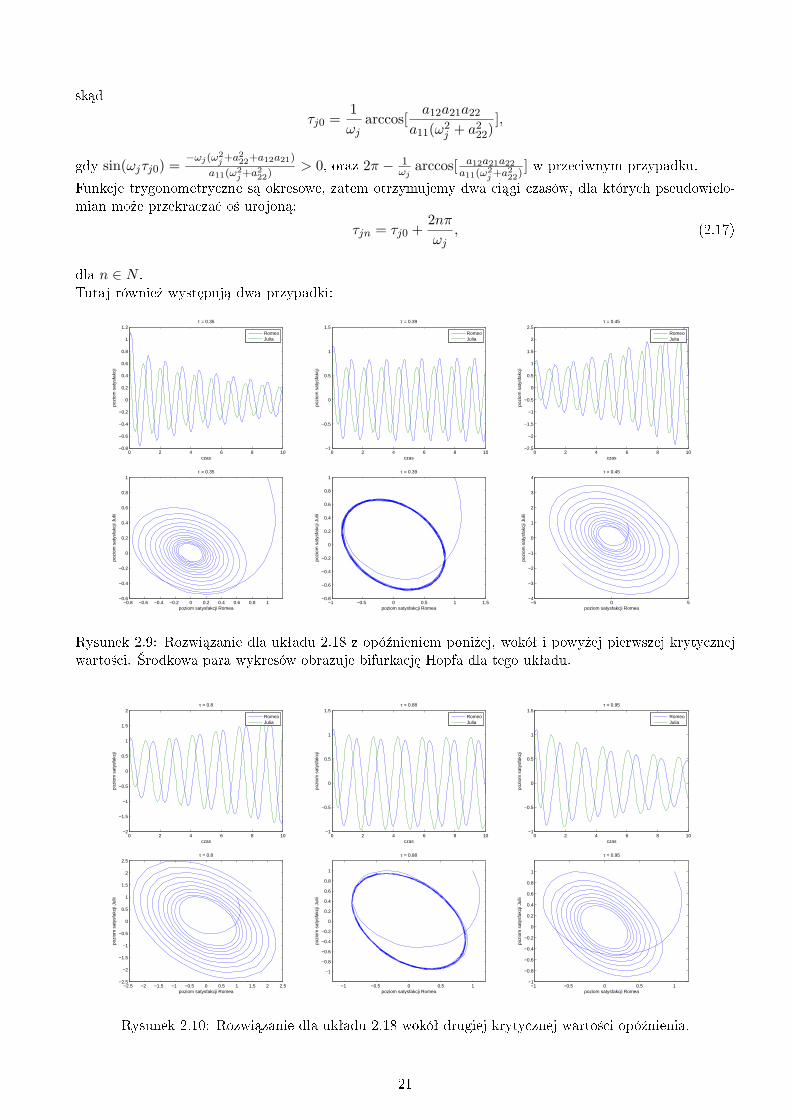
Rysunek 2.9: Rozwi¡zanie dla ukªadu 2.18 z opó¹nieniem poni»ej, wokóª i powy»ej pierwszej krytycznejwarto±ci. �rodkowa para wykresów obrazuje bifurkacj¦ Hopfa dla tego ukªadu.
0 2 4 6 8 10−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 0.8
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10−1
−0.5
0
0.5
1
1.5τ = 0.88
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10−1
−0.5
0
0.5
1
1.5τ = 0.95
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5−2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
2.5τ = 0.8
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
τ = 0.88
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
τ = 0.95
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.10: Rozwi¡zanie dla ukªadu 2.18 wokóª drugiej krytycznej warto±ci opó¹nienia.
21

0 5 10 15−1
−0.5
0
0.5
1
1.5τ = 1.4
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15−1
−0.5
0
0.5
1
1.5τ = 1.52
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15−1
−0.5
0
0.5
1
1.5τ = 1.65
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1 −0.5 0 0.5 1−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2τ = 1.40
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2τ = 1.52
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
τ = 1.65
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.11: Rozwi¡zanie dla ukªadu 2.18 wokóª trzeciej krytycznej warto±ci opó¹nienia.
1. Gdy ukªad startuje od stabilno±ci w zerze, to jego pierwiastki znajduj¡ si¦ w stanie stacjonarnympo lewej stronie póªpªaszczyzny zespolonej, a destabilizacja nast¡pi, gdy ukªad przekroczy o± urojon¡ zlewej strony pªaszczyzny zespolonej na praw¡, czyli gdy τ10 < τ00. Zatem, je±li jest speªniony ten warunek,zajdzie co najmniej jedna zmiana stabilno±ci. Interesuje nas jednak raczej, kiedy nast¡pi wi¦cej ni» jednazmiana stabilno±ci, poniewa» takiego zjawiska w przypadku a) w ogóle nie mieli±my szans zobaczy¢.
Wiemy, z twierdzenia o destabilizacji (Cooke, 1986), »e je±li dla dowolnego ukªadu dynamicznego wpewnym przedziale warto±ci τ nast¦puje niestabilno±¢, to dla τ � +∞ równie» otrzymamy niestabilno±¢,dlatego dla rozwa»anego przypadku, je±li chcemy otrzyma¢ wi¦cej ni» jedn¡ zmian¦ stabilno±ci, musz¡ by¢co najmniej trzy, tak, aby ukªad mógª odby¢ przej±cia stabilno±¢-niestabilno±¢-stabilno±¢-niestabilno±¢, isko«czy¢ w niestabilno±ci. St¡d ukªad nierówno±ci
τ10 < τ00 < τ11
Reasumuj¡c, aby otrzyma¢ trzy zmiany stabilno±ci, potrzebujemy, by parametry modelu speªniaªy ukªadnierówno±ci
∆(F ) > 0|a12a21| > |a11a22|a11 + a22 < 0a11a22 − a12a21 > 0a2
11 − a222 − 2a12a21 > 0
1ω1
arccos( a12a21a22
a11(ω21+a2
22)) < 1
ω0arccos( a12a21a22
a11(ω20+a2
22))
1ω0
arccos( a12a21a22
a11(ω20+a2
22)) < 1
ω1arccos( a12a21a22
a11(ω21+a2
22)) + 2π
ω1
Je±li chcemy zobaczy¢ taki przypadek, wystarczy numerycznie znale¹¢ i zasymulowa¢ ukªad dla parametrów,które speªniaj¡ te nierówno±ci, pami¦taj¡c o tym, »e domy±lnym zbiorem warto±ci funkcji arccos jest [0, π)i je±li dla danego k¡ta α dostajemy sin(α) < 0, oznacza to, »e w praktyce szukamy k¡ta 2π−arccos(cos(α)).W ten sposób otrzymany ukªad o wspóªczynnikach
a11 = −2, 1779a12 = 4, 7596a21 = −4, 6357a22 = −1, 7376
(2.18)
obrazuj¡ rysunki 2.9, 2.10, 2.11. W ka»dym przypadku odt¡d do ko«ca rozdziaªu warto±¢ r0(t) naprzedziale (−τ ; 0] wynosi 1 oraz y0(0) = 1, co oznaczamy skrótowo jako [r0, j0] = [1, 1].
22

Mo»na zauwa»y¢, »e dla wi¦kszych opó¹nie« (rys. 2.11) ukªad potrzebuje dªu»szej chwili, by wypra-cowa¢ oscylacje, co jest naturaln¡ konsekwencj¡ faktu, »e jednocze±nie wydªu»a si¦ czas, na którym zadanyjest warunek pocz¡tkowy, b¦d¡cy tutaj funkcj¡ staª¡.
T¡ sam¡ metod¡ mo»na uzyska¢ dowoln¡ liczb¦ przedziaªów stabilno±ci, pami¦taj¡c, »e z ka»dymkolejnym przedziaªem dochodz¡ do powy»szego ukªadu kolejne dwie nierówno±ci, a wi¦c trudniej jestnumerycznie �utra�¢� w taki zestaw parametrów, aby speªniaª on wszystkie nierówno±ci naraz, co stanowiproblem jedynie ilo±ciowy, a nie jako±ciowy. W Dodatku A pokazano inny przykªad, tym razem dla 5zmian, a wi¦c 3 przedziaªów stabilno±ci.
Warto zwróci¢ uwag¦, jak fascynuj¡ce jest to zjawisko. Wprowadzenie najprostszej mo»liwej postaciopó¹nienia w jednym miejscu w ukªadzie powoduje, »e ukªad ten mo»e dla odpowiednich parametrówzmienia¢ swój charakter w zale»no±ci od opó¹nienia w zasadzie w niesko«czono±¢.
2. Gdy ukªad startuje od braku stabilno±ci, przynajmniej jeden z jego pierwiastków znajduje si¦ wstanie stacjonarnym po prawej stronie póªpªaszczyzny zespolonej, a stabilizacja nast¡pi, gdy ten pier-wiastek przekroczy o± urojon¡ z prawej strony podró»uj¡c w stron¦ lew¡, czyli poprzez punkt iω0. St¡d,musi zaj±¢
τ00 < τ10
W tym wypadku równie» mo»na otrzyma¢ nieograniczon¡ liczb¦ przedziaªów stabilno±ci, pami¦taj¡c, »eukªad w niesko«czono±ci musi si¦ destabilizowa¢. W literaturze pojawiª si¦ przypadek tego rodzaju, ojednym przedziale stabilno±ci (Bodnar, 2010) nie zaczynaj¡cym si¦ od zera, przy czym do ukªadu typu2.11 doª¡czono w nim jeszcze jeden czªon bez opó¹nienia (do pierwszego równania doª¡czono wyra»eniea13r(t) po prawej stronie) argumentuj¡c, »e dla prostszych ukªadów liniowych, jak 2.11, takie zjawiskonie zachodzi. Podamy tutaj przykªad na to, »e takie zjawisko jednak zachodzi dla ukªadów typu 2.11,to jest »e istnieje ukªad, dla którego zachodzi niestabilno±¢ w zerze, jeden przedziaª stabilno±ci, i trwaªadestabilizacja.Ukªad taki powinien speªnia¢:
τ00 < τ10 < τ01,
co w sumie daje ukªad nierówno±ci
∆(F (y)) > 0|a12a21| > |a11a22|(a11 + a22 > 0)v(a11a22 − a12a21 < 0)a2
11 − a222 − 2a12a21 > 0
1ω0
arccos[ a12a21a22
a11(ω20+a2
22)] < 1
ω1arccos[ a12a21a22
a11(ω21+a2
22)]
1ω1
arccos[ a12a21a22
a11(ω21+a2
22)] < 1
ω0arccos[ a12a21a22
a11(ω20+a2
22)] + 2π
ω0
Przykªad takiego ukªadu dostajemy dla wspóªczynników
a11 = 3, 1428a12 = −2, 5648a21 = 4, 2926a22 = −1, 5002
(2.19)
Jest to ukªad, który speªnia pokªadane w nim nadzieje. Jest on niestabilny w zerze, bo a11 + a22 > 0, azachowanie ukªadu wokóª dwóch punktów zmiany stabilno±ci obrazuj¡ rysunki 2.12 i 2.13.
23

0 5 10 15 20−4
−3
−2
−1
0
1
2
3
4τ = 0.25
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 0.27
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 0.3
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5−4
−3
−2
−1
0
1
2
3
4τ = 0.25
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1.5 −1 −0.5 0 0.5 1 1.5−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 0.27
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 0.3
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.12: Rozwi¡zanie dla ukªadu 2.19 wokóª pierwszej krytycznej warto±ci opó¹nienia.
Opó¹nienie w jednym miejscu, typ II
Tym razem opó¹nienie wprowadzamy, jak poprzednio, do wzoru na pochodn¡ satysfakcji Romea, aleumieszczamy w czªonie odpowiadaj¡cym za reakcj¦ na stan Julii, co powinno by¢ bli»sze rzeczywisto±cini» przypadek poprzedni: {
r(t) = a11r(t) + a12j(t− τ)j(t) = a21r(t) + a22j(t)
(2.20)
Pseudowielomian charakterystyczny dla tego ukªadu ma posta¢
w(λ) = λ2 − (a11 + a22)λ + a11a22 − a12a21e−λτ , (2.21)
a odpowiadaj¡ca funkcja F (y) = y2 + (a211 + a2
22)y + (a11a22)2 − (a12a21)2.Dostajemy, odwrotnie ni» w poprzednim ukªadzie, przypadki:
a) gdy |a11a22| < |a12a21|, to wyraz wolny fukcji F (y) jest ujemny, a wi¦c F (0) < 0 i mamy jedenpierwiastek dodatni y0, w którym F ′(y0) =
√∆(F (y)) > 0, a wi¦c w tym miejscu mo»liwe jest jedynie
przej±cie pseudowielomianu z lewej strony na praw¡. Wówczas:1) je±li ukªad jest niestabilny dla τ = 0, tzn. a11 + a22 > 0 lub a11a22− a12a21 < 0, to jest niestabilny
dla dowolnego τ .2) je±li ukªad jest stabilny dla τ = 0, to istnieje τc, dla którego zachodzi bifurkacja Hopfa i ukªad si¦
destabilizuje. Jest to, jak poprzednio, najmniejsza warto±¢ τ taka, »e Re[w(iω0)] i Im[w(iω0)] s¡ równe0. Ich posta¢ {
Re[w(iω)] = −ω2 − a12a21 cos(ωτ) + a11a22
Im[w(iω)] = −(a11 + a22)ω + a12a21 sin(ωτ)
sk¡d dostajemy {sin(ω0τc) = ω0(a11+a22)
a12a21
cos(ω0τc) = −ω20+a11a22
a12a21,
(2.22)
dla ω0 = [12(−a211 − a2
22 + [(a211 + a2
22)2 − 4((a11a22)2 − (a12a21)2)]
12 )]
12 i szukane krytyczne τc wynosi
τc =1ω0
arccos[a11a22 − ω2
0
a12a21],
24
0 5 10 15 20−0.5
0
0.5
1
1.5
2τ = 0.9
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−0.5
0
0.5
1
1.5
2τ = 0.96
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−0.5
0
0.5
1
1.5
2τ = 1.0
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−0.4 −0.2 0 0.2 0.4 0.6 0.8 1 1.2−0.5
0
0.5
1
1.5
2τ = 0.9
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−0.4 −0.2 0 0.2 0.4 0.6 0.8 1 1.2−0.5
0
0.5
1
1.5
2τ = 0.96
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 1.0
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.13: Rozwi¡zanie dla ukªadu 2.19 wokóª drugiej krytycznej warto±ci opó¹nienia.
pod warunkiem sin(ω0τc) = ω0(1+a11+a22)a12a21
> 0 i 2π − 1ω0
arccos[a11a22−ω20
a12a21] w przeciwnym przypadku.
b) gdy |a11a22| > |a12a21|, to zmiany stabilno±ci s¡ mo»liwe tylko gdy F (y) ma dwa pierwiastkidodatnie, czyli gdy {
a211 + a2
22 < 0(a2
11 + a222)
2 − 4[(a11a22)2 − (a12a21)2] > 0
Ale ten ukªad nierówno±ci nigdy nie zachodzi, bo a211 + a2
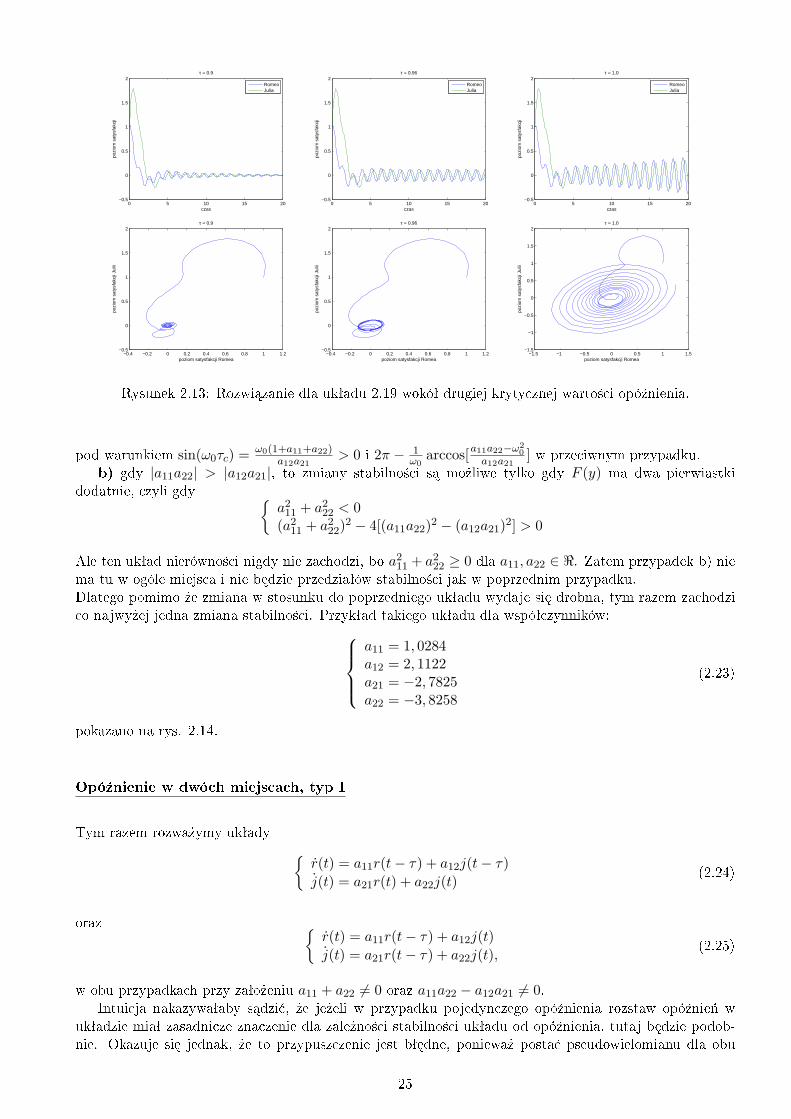
22 ≥ 0 dla a11, a22 ∈ <. Zatem przypadek b) niema tu w ogóle miejsca i nie b¦dzie przedziaªów stabilno±ci jak w poprzednim przypadku.Dlatego pomimo »e zmiana w stosunku do poprzedniego ukªadu wydaje si¦ drobna, tym razem zachodzico najwy»ej jedna zmiana stabilno±ci. Przykªad takiego ukªadu dla wspóªczynników:
a11 = 1, 0284a12 = 2, 1122a21 = −2, 7825a22 = −3, 8258
(2.23)
pokazano na rys. 2.14.
Opó¹nienie w dwóch miejscach, typ I
Tym razem rozwa»ymy ukªady{
r(t) = a11r(t− τ) + a12j(t− τ)j(t) = a21r(t) + a22j(t)
(2.24)
oraz {r(t) = a11r(t− τ) + a12j(t)j(t) = a21r(t− τ) + a22j(t),
(2.25)
w obu przypadkach przy zaªo»eniu a11 + a22 6= 0 oraz a11a22 − a12a21 6= 0.Intuicja nakazywaªaby s¡dzi¢, »e je»eli w przypadku pojedynczego opó¹nienia rozstaw opó¹nie« w
ukªadzie miaª zasadnicze znaczenie dla zale»no±ci stabilno±ci ukªadu od opó¹nienia, tutaj b¦dzie podob-nie. Okazuje si¦ jednak, »e to przypuszczenie jest bª¦dne, poniewa» posta¢ pseudowielomianu dla obu
25
0 5 10 15 20−4
−3
−2
−1
0
1
2
3
4
5τ = 0.45
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−6
−4
−2
0
2
4
6τ = 0.495
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−80
−60
−40
−20
0
20
40
60
80τ = 0.60
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−4 −3 −2 −1 0 1 2 3 4 5−4
−3
−2
−1
0
1
2
3τ = 0.45
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−6 −4 −2 0 2 4 6−4
−3
−2
−1
0
1
2
3
4τ = 0.495
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−80 −60 −40 −20 0 20 40 60 80−40
−30
−20
−10
0
10
20
30
40
50τ = 0.60
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
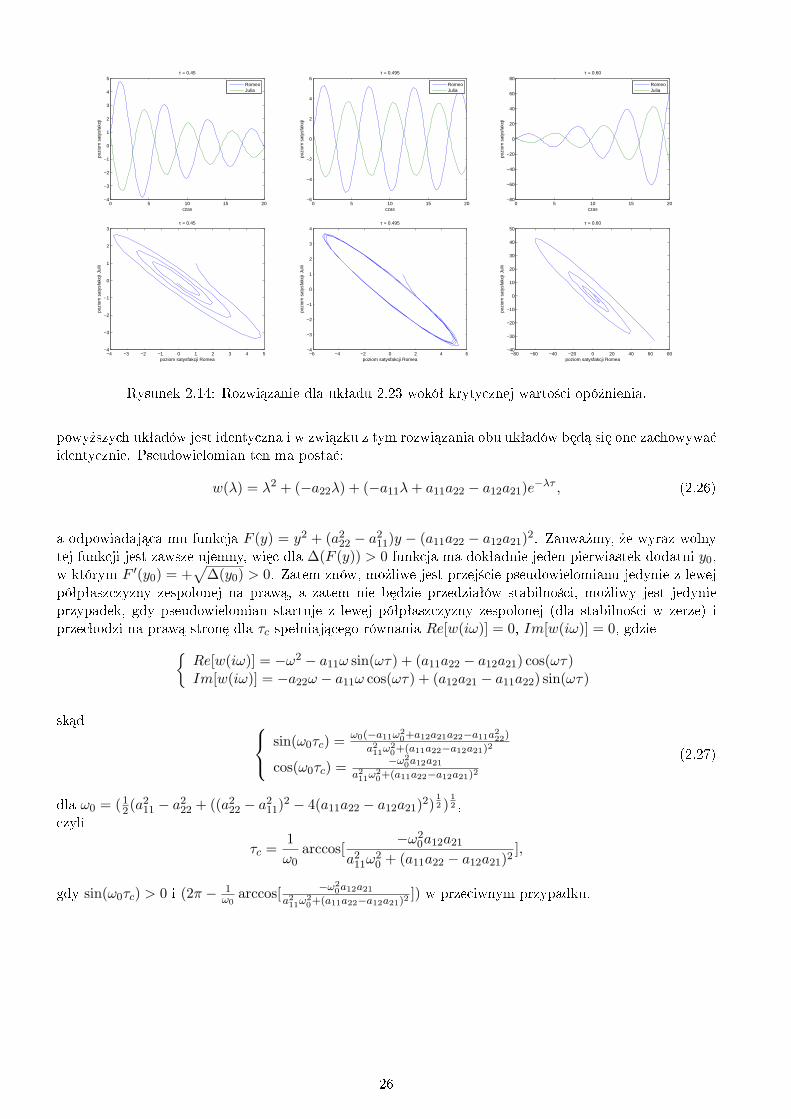
Rysunek 2.14: Rozwi¡zanie dla ukªadu 2.23 wokóª krytycznej warto±ci opó¹nienia.
powy»szych ukªadów jest identyczna i w zwi¡zku z tym rozwi¡zania obu ukªadów b¦d¡ si¦ one zachowywa¢identycznie. Pseudowielomian ten ma posta¢:
w(λ) = λ2 + (−a22λ) + (−a11λ + a11a22 − a12a21)e−λτ , (2.26)
a odpowiadaj¡ca mu funkcja F (y) = y2 + (a222 − a2
11)y − (a11a22 − a12a21)2. Zauwa»my, »e wyraz wolnytej funkcji jest zawsze ujemny, wi¦c dla ∆(F (y)) > 0 funkcja ma dokªadnie jeden pierwiastek dodatni y0,w którym F ′(y0) = +
√∆(y0) > 0. Zatem znów, mo»liwe jest przej±cie pseudowielomianu jedynie z lewej
póªpªaszczyzny zespolonej na praw¡, a zatem nie b¦dzie przedziaªów stabilno±ci, mo»liwy jest jedynieprzypadek, gdy pseudowielomian startuje z lewej póªpªaszczyzny zespolonej (dla stabilno±ci w zerze) iprzechodzi na praw¡ stron¦ dla τc speªniaj¡cego równania Re[w(iω)] = 0, Im[w(iω)] = 0, gdzie
{Re[w(iω)] = −ω2 − a11ω sin(ωτ) + (a11a22 − a12a21) cos(ωτ)Im[w(iω)] = −a22ω − a11ω cos(ωτ) + (a12a21 − a11a22) sin(ωτ)
sk¡d
sin(ω0τc) = ω0(−a11ω20+a12a21a22−a11a2
22)
a211ω2
0+(a11a22−a12a21)2
cos(ω0τc) = −ω20a12a21
a211ω2
0+(a11a22−a12a21)2
(2.27)
dla ω0 = (12(a2
11 − a222 + ((a2
22 − a211)
2 − 4(a11a22 − a12a21)2)12 )
12 ,
czyliτc =
1ω0
arccos[−ω2
0a12a21
a211ω
20 + (a11a22 − a12a21)2
],
gdy sin(ω0τc) > 0 i (2π − 1ω0
arccos[ −ω20a12a21
a211ω2
0+(a11a22−a12a21)2]) w przeciwnym przypadku.
26
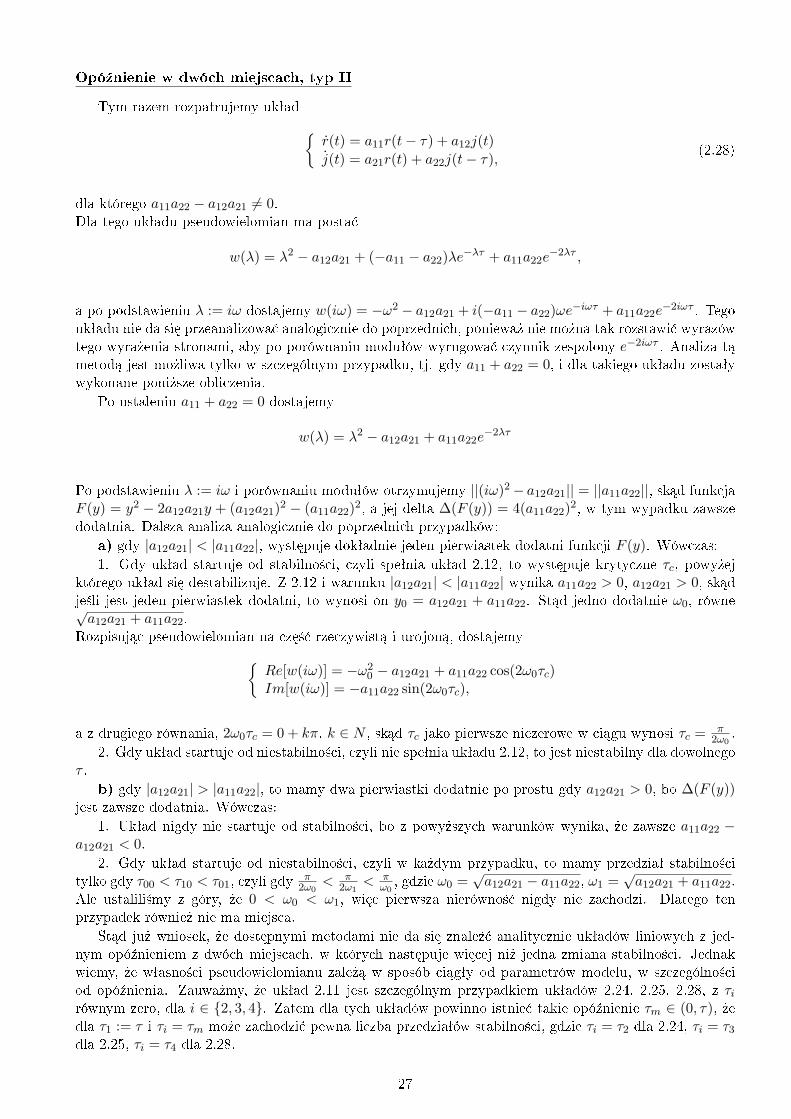
Opó¹nienie w dwóch miejscach, typ II
Tym razem rozpatrujemy ukªad{
r(t) = a11r(t− τ) + a12j(t)j(t) = a21r(t) + a22j(t− τ),
(2.28)
dla którego a11a22 − a12a21 6= 0.Dla tego ukªadu pseudowielomian ma posta¢
w(λ) = λ2 − a12a21 + (−a11 − a22)λe−λτ + a11a22e−2λτ ,
a po podstawieniu λ := iω dostajemy w(iω) = −ω2 − a12a21 + i(−a11 − a22)ωe−iωτ + a11a22e−2iωτ . Tego
ukªadu nie da si¦ przeanalizowa¢ analogicznie do poprzednich, poniewa» nie mo»na tak rozstawi¢ wyrazówtego wyra»enia stronami, aby po porównaniu moduªów wyrugowa¢ czynnik zespolony e−2iωτ . Analiza t¡metod¡ jest mo»liwa tylko w szczególnym przypadku, tj. gdy a11 + a22 = 0, i dla takiego ukªadu zostaªywykonane poni»sze obliczenia.
Po ustaleniu a11 + a22 = 0 dostajemy
w(λ) = λ2 − a12a21 + a11a22e−2λτ
Po podstawieniu λ := iω i porównaniu moduªów otrzymujemy ||(iω)2− a12a21|| = ||a11a22||, sk¡d funkcjaF (y) = y2 − 2a12a21y + (a12a21)2 − (a11a22)2, a jej delta ∆(F (y)) = 4(a11a22)2, w tym wypadku zawszedodatnia. Dalsza analiza analogicznie do poprzednich przypadków:
a) gdy |a12a21| < |a11a22|, wyst¦puje dokªadnie jeden pierwiastek dodatni funkcji F (y). Wówczas:1. Gdy ukªad startuje od stabilno±ci, czyli speªnia ukªad 2.12, to wyst¦puje krytyczne τc, powy»ej
którego ukªad si¦ destabilizuje. Z 2.12 i warunku |a12a21| < |a11a22| wynika a11a22 > 0, a12a21 > 0, sk¡dje±li jest jeden pierwiastek dodatni, to wynosi on y0 = a12a21 + a11a22. St¡d jedno dodatnie ω0, równe√
a12a21 + a11a22.Rozpisuj¡c pseudowielomian na cz¦±¢ rzeczywist¡ i urojon¡, dostajemy
{Re[w(iω)] = −ω2
0 − a12a21 + a11a22 cos(2ω0τc)Im[w(iω)] = −a11a22 sin(2ω0τc),
a z drugiego równania, 2ω0τc = 0 + kπ, k ∈ N , sk¡d τc jako pierwsze niezerowe w ci¡gu wynosi τc = π2ω0
.2. Gdy ukªad startuje od niestabilno±ci, czyli nie speªnia ukªadu 2.12, to jest niestabilny dla dowolnego
τ .b) gdy |a12a21| > |a11a22|, to mamy dwa pierwiastki dodatnie po prostu gdy a12a21 > 0, bo ∆(F (y))
jest zawsze dodatnia. Wówczas:1. Ukªad nigdy nie startuje od stabilno±ci, bo z powy»szych warunków wynika, »e zawsze a11a22 −
a12a21 < 0.2. Gdy ukªad startuje od niestabilno±ci, czyli w ka»dym przypadku, to mamy przedziaª stabilno±ci
tylko gdy τ00 < τ10 < τ01, czyli gdy π2ω0
< π2ω1
< πω0, gdzie ω0 =
√a12a21 − a11a22, ω1 =
√a12a21 + a11a22.
Ale ustalili±my z góry, »e 0 < ω0 < ω1, wi¦c pierwsza nierówno±¢ nigdy nie zachodzi. Dlatego tenprzypadek równie» nie ma miejsca.
St¡d ju» wniosek, »e dost¦pnymi metodami nie da si¦ znale¹¢ analitycznie ukªadów liniowych z jed-nym opó¹nieniem z dwóch miejscach, w których nast¦puje wi¦cej ni» jedna zmiana stabilno±ci. Jednakwiemy, »e wªasno±ci pseudowielomianu zale»¡ w sposób ci¡gªy od parametrów modelu, w szczególno±ciod opó¹nienia. Zauwa»my, »e ukªad 2.11 jest szczególnym przypadkiem ukªadów 2.24, 2.25, 2.28, z τi
równym zero, dla i ∈ {2, 3, 4}. Zatem dla tych ukªadów powinno istnie¢ takie opó¹nienie τm ∈ (0, τ), »edla τ1 := τ i τi = τm mo»e zachodzi¢ pewna liczba przedziaªów stabilno±ci, gdzie τi = τ2 dla 2.24, τi = τ3
dla 2.25, τi = τ4 dla 2.28.
27

Opó¹nienie w trzech miejscach
Jak b¦dzie zatem wygl¡da¢ zachowanie ukªadu{
r(t) = a11r(t− τ) + a12j(t− τ)j(t) = a21r(t− τ) + a22j(t),
(2.29)
przy zaªo»eniach a11 + a22 6= 0 oraz a11a22 − a12a21 6= 0?Pseudowielomian dla takiego ukªadu ma posta¢
w(λ) = λ2 − a22λ + (−a11λ + a11a22)e−λτ − a12a21e−2λτ (2.30)
Niestety, z tego pseudowielomianu nie da si¦ ju» w ogóle uzyska¢ funkcji wielomianowej F (y) bez zerowanianiektórych wspóªczynników, analiza u»ywan¡ tutaj metod¡ nie jest wi¦c mo»liwa. Oczywi±cie, s¡ ukªady,które s¡ stabilne w zerze (dla tych samych warunków, co wszelkie inne ukªady w tym rozdziale) i destabi-lizuj¡ si¦ w niesko«czono±ci, natomiast trudno bez dokªadnego przepisu znale¹¢ takie, które destabilizuj¡si¦ wi¦cej razy.
Dla eksperymentu mo»na tutaj zasymulowa¢ ukªad o parametrach takich jak 2.18, ale po przeper-mutowaniu ich tak, aby zamieni¢ miejscami Romea i Juli¦. W ukªadzie 2.11 o parametrach 2.18 czªonzawieraj¡cy opó¹nienie jest jedynym takim czªonem w ukªadzie, a ponadto znajduje si¦ w równaniu napochodn¡ zmiennej, któr¡ opisuje, natomiast w ukªadzie 2.29 jest tylko jeden czªon bez opó¹nienia irównie» odpowiada on tej samej zmiennej, której pochodn¡ opisuje. We wspomnianym ukªadzie mieli±my3 zmiany stabilno±ci, mo»na wi¦c sprawdzi¢, czy w ukªadzie 2.29 z parametrami
a11 = −1, 7376a12 = −4, 6357a21 = 4, 7596a22 = −2, 1779
(2.31)
zachowuje si¦ analogicznie. Okazuje si¦, »e nie. Ten ukªad oczywi±cie równie» startuje od stabilno±ci, alema tylko jedn¡ bifurkacj¦ Hopfa i ko«czy w niestabilno±ci (rys. 2.15).
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5τ=0.078
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5τ=0.088
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10−4
−3
−2
−1
0
1
2
3
4
5τ=0.095
czas
pozi
om s
atys
fakc
ji
RomeoJulia
Rysunek 2.15: Rozwi¡zanie dla ukªadu 2.31 wokóª krytycznej warto±ci opó¹nienia.
Opó¹nienie w ukªadach liniowych rozszerzonych o inne czªony niezerowe
Wró¢my do ukªadu równa« postaci 2.1 i zaªó»my, »e a13 6= 0. Mamy wi¦c ukªad{
r(t) = a11r(t− τ) + a12j(t) + a13r(t)j(t) = a21r(t) + a22j(t),
(2.32)
który dla τ = 0 jest identycznej postaci jak 2.11, z warunkami stabilno±ci{
a11 + a13 + a22 < 0(a11 + a13)a22 − a12a21 > 0
(2.33)
28

Ponadto pseudowielomian dla tego ukªadu ma posta¢
w(λ) = λ2 + (−a22 − a13)λ + (−a11λ + a11a22)e−λτ + a13a22 − a12a21, (2.34)
a odpowiadaj¡ca mu funkcja F (y) = y2 + (a222 + a2
13 + 2a12a21 − a211)y + (a13a22 − a12a21)2 − (a11a22)2 i
∆(F (y)) = (a222 + a2
13 + 2a12a21 − a211)
2 − 4(a13a22 − a12a21)2 + 4(a11a22)2.Pierwiastki pseudowielomianu, jak i wªasno±ci funkcji F (y), zale»¡ w sposób ci¡gªy od parametrów,
a dla a13 = 0 mamy przypadek identyczny jak 2.11, wi¦c b¦dzie istniaª taki przedziaª a13 ∈ (−ε, ε),dla którego ukªad b¦dzie si¦ zachowywaª tak samo jak ukªad 2.11, to znaczy dla którego mo»na uzyska¢dowoln¡ liczb¦ przedziaªów stabilno±ci.
Do czego taki ukªad si¦ mo»e przyda¢? Wyra»enia opisuj¡ce ci¡gi krytycznych τ wyra»aj¡ si¦ inn¡funkcj¡ ni» dla ukªadu 2.11, dlatego mo»emy uzyska¢ inny przebieg zmienno±ci zachowania ukªadu wzale»no±ci od opó¹nienia. Na przykªad, znale¹¢ ukªad wspóªczynników a11, a12, a21, a22 i a13 = 0 takich,by uzyska¢ po»¡dan¡ liczb¦ zmian stabilno±ci, a potem tak zmieni¢ warto±¢ a13, aby uzyskane przedziaªyodpowiednio rozsun¡¢. Mo»e si¦ to przyda¢ przy modelowaniu realnie przebiegaj¡cych w przyrodzie pro-cesów, w których wyst¦puje zale»no±¢ charakteru procesu od opó¹nienia pewnej reakcji organizmu/ukªadubiologicznego (jak zjawisko hematopoezy, Bielczyk 2008).
Dla porz¡dku podamy wi¦c, jak wygl¡daj¡ warunki stabilno±ci w tym ukªadzie i poka»emy przykªaddla dwóch przedziaªów stabilno±ci z pocz¡tkiem w zerze, dla warto±ci pozostaªych parametrów takichsamych jak dla ukªadu 2.18 i niezerowej warto±ci a13 takiej, aby uzyska¢ równie» trzy zmiany stabilno±ci.Analogicznie do przypadku 2.11, mo»emy podzieli¢ t¡ sytuacj¦ na dwa przypadki:
a) je±li |a13a22 − a12a21| < |a11a22| i ∆(F (y)) > 0, to funkcja F (y) ma dokªadnie jeden dodatnipierwiastek, w którym pochodna jest dodatnia. St¡d analogicznie do poprzednich przypadków:
1. Je±li pseudowielomian startuje od stabilno±ci w zerze, to jedna destabilizacja w punkcie τc, speª-niaj¡cym równania
sin(ω0τc) = −ω0(ω20+a2
22+a12a21)
a11(ω20+a2
22)
cos(ω0τc) = −a13ω20+a22(a12a21−a13a22)
a11(ω20+a2
22),
(2.35)
dla ω0 = [12(a211−a2
22−a213−2a12a21 +[(a2
22 +a213 +2a12a21−a2
11)2−4(a13a22−a12a21)2 +4(a11a22)2]
12 )]
12 .
2. Je±li pseudowielomian startuje od niestabilno±ci, to niestabilno±¢ dla ka»dego τ .b) je±li |a13a22−a12a21| > |a11a22|, ∆(F (y)) > 0 i a2
22+a213+2a12a21−a2
11 < 0, to funkcja F (y) ma dwapierwiastki dodatnie, zatem znów, dwa ci¡gi czasów τjn, w których pseudowielomian mo»e przekracza¢ o±urojon¡, speªniaj¡ce równania
sin(ωjτj) =−ωj(ω
2j +a2
22+a12a21)
a11(ω2j +a2
22)
cos(ωjτj) = −a13ω20+a22(a12a21−a13a22)
a11(ω2j +a2
22),
(2.36)
dla [12(a211 − a2
22 − a213 − 2a12a21 ± [(a2
22 + a213 + 2a12a21 − a2
11)2 − 4(a13a22 − a12a21)2 + 4(a11a22)2]12)]
12 ,
j ∈ {0, 1}, 0 < ω0 < ω1, oraz zachodzi równo±¢ 2.17. Na rysunkach 2.16, 2.17, 2.18 zamieszczonowykresy opisuj¡ce zachowanie ukªadu dla parametrów 2.18 oraz a13 = 1, 5574. Jest to ukªad stabilny wzerze, bo speªnia warunki 2.33, oraz ma trzy zmiany stabilno±ci, bifurkacje Hopfa przechodz¡c kolejno dlaτ1 = 0, 239, τ2 = 1, 245, τ3 = 1, 35. Ukªad 2.18 przechodziª bifurkacje Hopfa odpowiednio dla warto±ciopó¹nienia 0, 39, 0, 88, 1, 52. Jak wida¢, tutaj pierwsza destabilizacja nast¦puje szybciej, za to drugazmiana stabilno±ci pó¹niej ni» w poprzednim przypadku.
Naszym celem jest rozwa»enie ukªadu 2.1, we wszystkich mo»liwych odmianach. Jednak cel ten zostaªju» osi¡gni¦ty, poniewa» pokazali±my, »e dopisanie czªonów bez opó¹nienia do danego ukªadu z opó¹nieni-ami niczego nie zmienia1, je±li chodzi o charakter ukªadu i maksymaln¡ liczb¦ przedziaªów stabilno±ci,jak¡ mo»emy uzyska¢. Rozwa»yli±my ju» wszystkie podukªady z a13, a14, a23 i a24 równymi zeru, czyli
1...podczas gdy dopisanie czªonów bez opó¹nienia do czªonów bez opó¹nienia tym bardziej: ar(t) + br(t) = (a + b)r(t).Jak równie» dopisanie czªonów z opó¹nieniem do czªonów z opó¹nieniem: cr(t− τ) + dr(t− τ) = (c + d)r(tτ).
29
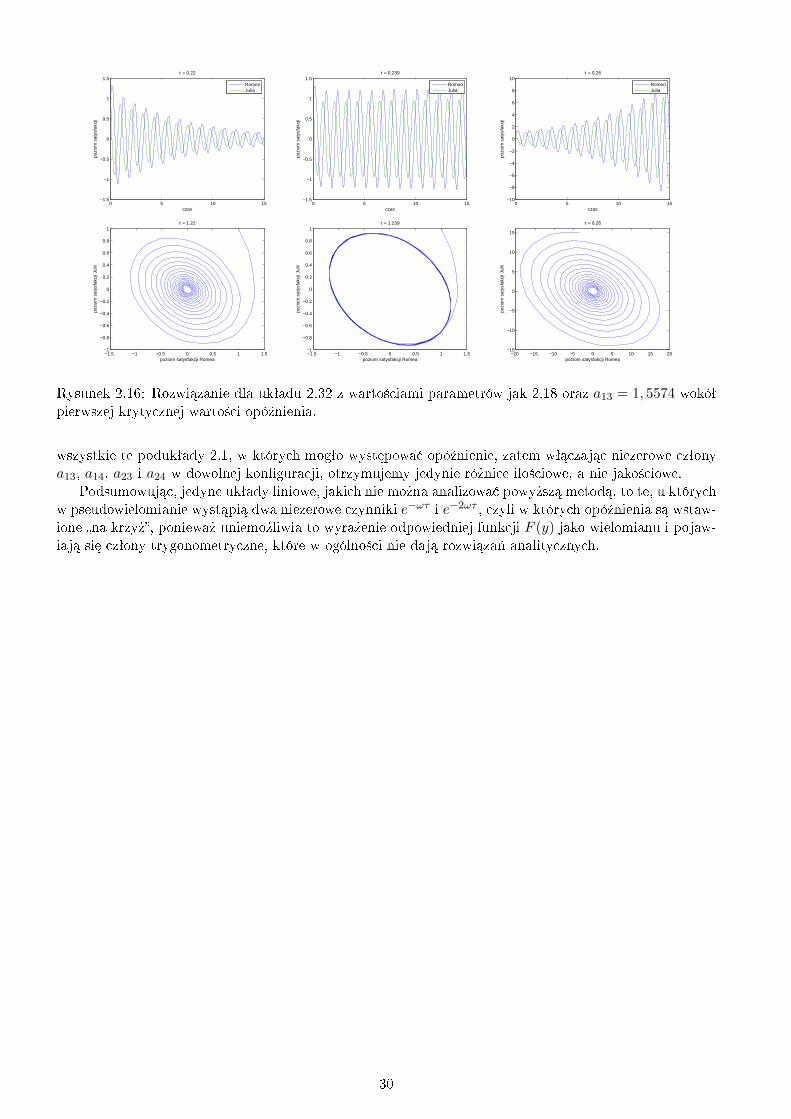
0 5 10 15−1.5
−1
−0.5
0
0.5
1
1.5τ = 0.22
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15−1.5
−1
−0.5
0
0.5
1
1.5τ = 0.239
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15−10
−8
−6
−4
−2
0
2
4
6
8
10τ = 0.26
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1.5 −1 −0.5 0 0.5 1 1.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1τ = 1.22
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1.5 −1 −0.5 0 0.5 1 1.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1τ = 1.239
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−20 −15 −10 −5 0 5 10 15 20−15
−10
−5
0
5
10
15
τ = 0.26
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.16: Rozwi¡zanie dla ukªadu 2.32 z warto±ciami parametrów jak 2.18 oraz a13 = 1, 5574 wokóªpierwszej krytycznej warto±ci opó¹nienia.
wszystkie te podukªady 2.1, w których mogªo wyst¦powa¢ opó¹nienie, zatem wª¡czaj¡c niezerowe czªonya13, a14, a23 i a24 w dowolnej kon�guracji, otrzymujemy jedynie ró»nice ilo±ciowe, a nie jako±ciowe.
Podsumowuj¡c, jedyne ukªady liniowe, jakich nie mo»na analizowa¢ powy»sz¡ metod¡, to te, u którychw pseudowielomianie wyst¡pi¡ dwa niezerowe czynniki e−ωτ i e−2ωτ , czyli w których opó¹nienia s¡ wstaw-ione �na krzy»�, poniewa» uniemo»liwia to wyra»enie odpowiedniej funkcji F (y) jako wielomianu i pojaw-iaj¡ si¦ czªony trygonometryczne, które w ogólno±ci nie daj¡ rozwi¡za« analitycznych.
30
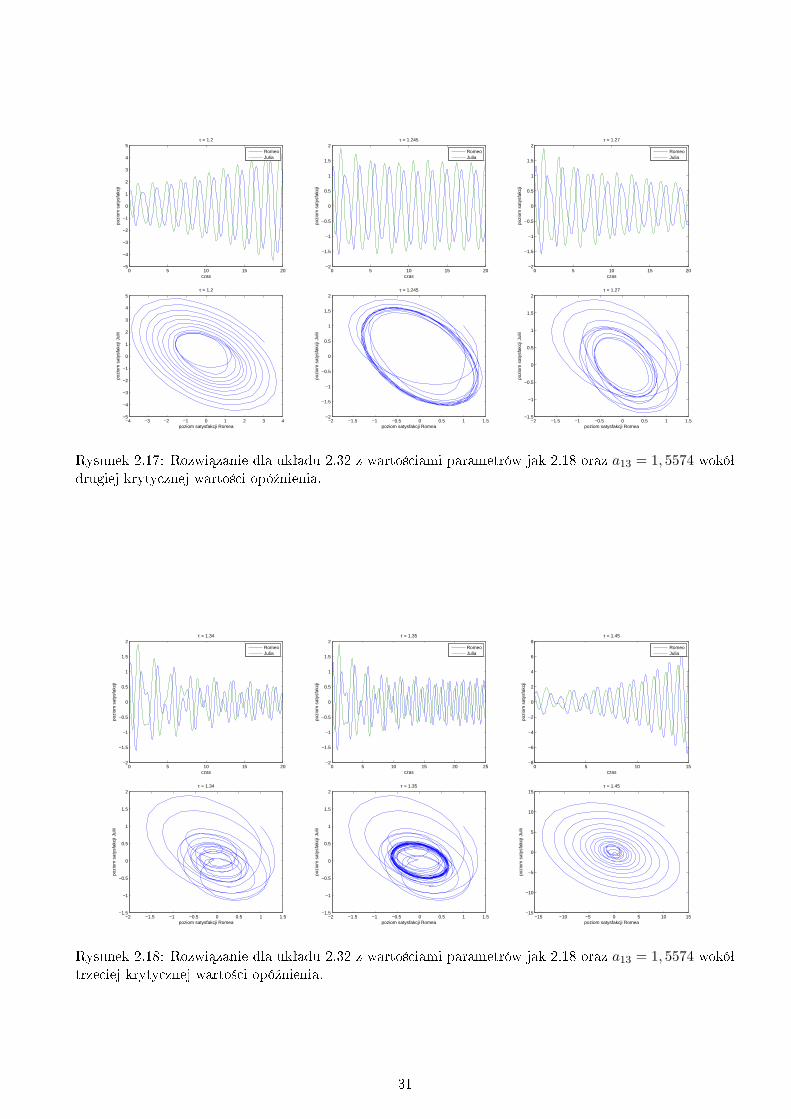
0 5 10 15 20−5
−4
−3
−2
−1
0
1
2
3
4
5τ = 1.2
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 1.245
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 1.27
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−4 −3 −2 −1 0 1 2 3 4−5
−4
−3
−2
−1
0
1
2
3
4
5τ = 1.2
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−2 −1.5 −1 −0.5 0 0.5 1 1.5−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 1.245
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−2 −1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 1.27
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.17: Rozwi¡zanie dla ukªadu 2.32 z warto±ciami parametrów jak 2.18 oraz a13 = 1, 5574 wokóªdrugiej krytycznej warto±ci opó¹nienia.
0 5 10 15 20−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 1.34
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20 25−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 1.35
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15−8
−6
−4
−2
0
2
4
6
8τ = 1.45
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−2 −1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 1.34
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−2 −1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 1.35
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−15 −10 −5 0 5 10 15−15
−10
−5
0
5
10
15τ = 1.45
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek 2.18: Rozwi¡zanie dla ukªadu 2.32 z warto±ciami parametrów jak 2.18 oraz a13 = 1, 5574 wokóªtrzeciej krytycznej warto±ci opó¹nienia.
31


Rozdziaª 3
Triada romantyczna
Literatura mówi, »e w histori¦ Romea i Julii zamieszany byª jeszcze dobrze urodzony kawaler Parys,przeznaczony przez rodzin¦ Julii do o»enku z dziewczyn¡. W tej sytuacji mo»na rozwa»y¢ nast¦puj¡cemutacje ukªadu 2.1:
r(t) = a11r(t) + a12j(t)j(t) = a21r(t− τ) + a22j(t) + a23p(t− τ)p(t) = a32j(t) + a33p(t)
(3.1)
r(t) = a11r(t) + a12j(t)j(t) = a21r(t) + a22j(t− τ) + a23p(t)p(t) = a32j(t) + a33p(t)
(3.2)
Ka»da z tych postaci jest uprawniona, poniewa» Romeo i Parys nie maj¡ ze sob¡ kontaktu, wi¦cnaturalne jest, »e nie reaguj¡ na swój stan nawzajem. Natomiast patrz¡c z punktu widzenia Julii, prze»ywaona kon�ikt i to ona potrzebuje w tej sytuacji przemy±le« i analizy. Ukªad 3.1 opisuje Juli¦-pragmatyczk¦,która analizuje otoczenie, a wi¦c zachowanie i stan ka»dego z dwóch panów, natomiast ukªad 3.2 odpowiadaJulii-introwertyczce, która ma tendencj¦ do analizowania przede wszystkim wªasnych stanów1.
Pseudowielomiany odpowiadaj¡ce tym ukªadom maj¡ posta¢
w1(λ)= λ3 + (−a11 − a22 − a33)λ2 + (a11a22 + a11a33 + a22a33)λ− a11a22a33 ++[(−a12a21 − a23a32)λ + a12a21a33 + a23a32a11]e−λτ
dla ukªadu 3.1 oraz
w2(λ)= λ3 + (−a11 − a33)λ2 + (a11a33 − a12a21 − a32a23)λ + a12a21a33 + a11a23a32 ++(−a22λ
2 + (a11a22 + a22a33)λ− a11a22a33)e−λτ
dla ukªadu 3.2, a odpowiadaj¡ce im funkcje F (y) maj¡ odpowiednio posta¢
F1(y)= y[y − (a11a22 + a11a33 + a22a33)]2 − y(a12a21 + a23a32)2 +−(a12a21a33 + a11a23a32)2
F2(y)= y(a11a33 − a12a21 − a23a32 − y)2 + [y(a11 + a33) + a12a21a33 + a11a23a32]2 +−(a11a22a33 − a22y)2 − y(a22a33 + a11a22)2
1do równania j(t) = a21r(t−τ)+a22j(t)+a23p(t−τ) mogliby±my dopisa¢ czªony r(t) i p(t), ale wiemy z cz¦±ci dotycz¡cejukªadów liniowych, »e taki ukªad miaªby podobne wªa±ciwo±ci. Podobnie z równaniem j(t) = a21r(t) + a22j(t− τ) + a23p(t)i czªonem j(t).
33

Obie te funkcje s¡, podobnie jak pseudowielomiany, stopnia 3, zatem wszelka analiza metod¡ z poprzed-niego rozdziaªu byªaby skomplikowana obliczeniowo i nie obeszªoby si¦ bez wzorów Cardano. Formalnierzecz bior¡c, jest to jednak mo»liwe.
Natomiast mo»emy w tym miejscu odwoªa¢ si¦ do wiedzy zdobytej w wyniku uprzednich rozwa»a«i znale¹¢ zale»no±ci pomi¦dzy ukªadami 3.1 i 3.2 a prostszymi modelami. Zauwa»my, »e ukªad 3.2 jestwariacj¡ na temat 2.11, poniewa» mo»na w nim znale¹¢ pojedyncze opó¹nienie w jednym z równa«,przy czªonie odpowiadaj¡cym tej samej zmiennej, której pochodn¡ wyra»a to równanie, mo»na si¦ wi¦cspodziewa¢, »e w takich ukªadach mo»na uzyska¢ dowoln¡ liczb¦ przedziaªów stabilno±ci, podobnie jak wprzypadkach typu 2.11.
Z kolei ukªad 3.1 odpowiada bardziej rozbudowanej wersji 2.20 - tzn. ukªadowi, w którym opó¹nieniewstawiamy do zmiennych w równaniu innym ni» równania na pochodn¡ tych zmiennych. Dla a11 = a33 = amo»emy t¡ odpowiednio±¢ pokaza¢ wprost, podstawiaj¡c s(t) := a21r(t)+a23p(t) i dostaj¡c ukªad równa«
{j(t) = a22j(t) + 1· s(t− τ)s(t) = (a12a21 + a23a32)j(t) + as(t)
(3.3)
Najbardziej interesuj¡cy jest przypadek, w którym dostajemy przedziaªy stabilno±ci. Dla poparciatezy, »e w ukªadach typu 3.2 mo»na uzyska¢ wiele zmian stabilno±ci, a nie tylko jedn¡, mo»emy rozszerzy¢znaleziony przykªad 2.18 (zamieniaj¡c tutaj Romea i Juli¦ miejscami) o czªony zawieraj¡ce p(t) i pokaza¢,»e istniej¡ takie, które zachowuj¡ si¦ podobnie, to jest daj¡ rozwi¡zania o dwóch przedziaªach (trzechzmianach) stabilno±ci.We¹my ukªad
a11 = −1, 7376a12 = −4, 6357a21 = 4, 7596a22 = −2, 1779a23 = 4.7596a32 = −2.6357a33 = −1.7376
(3.4)
W tym modelu wyst¦puje z namysªem rozwa»aj¡ca swoje stany, kapry±na Julia, dla której stan satysfakcjikochanka i kandydata na m¦»a, cho¢ z ró»nych powodów, to jednak s¡ tak samo wa»ne i w taki sam sposóbwpªywaj¡ na jej stan (a21 = a23), podczas gdy zarówno Romeo, jak i Parys maj¡ tendencj¦ do d¡»eniado równowagi, to jest ich poziom satysfakcji ro±nie, gdy rozwa»any stan satysfakcji jest ujemny i maleje,gdy jest dodatni (a11, a12, a22, a23 < 0), zarówno w rozwa»aniach nad sob¡, jak i nad partnerem. Przytym Parys jest mniej zaanga»owany ni» Romeo, wi¦c reaguje na stan Julii ze wspóªczynnikiem o mniejszejwarto±ci bezwzgl¦dnej.
Zmiany stabilno±ci tego ukªadu pokazane s¡ na rys. 3.1.Warto zauwa»y¢, »e we wszystkich trzech cyklach granicznych wahania nastroju u Julii s¡ najwi¦ksze,
Romea - mniejsze, a u niezaanga»owanego emocjonalnie Parysa - najmniejsze.
34

0 1 2 3 4 5−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ=0.38
czas
pozi
om s
atys
fakc
ji
RomeoJuliaParys
0 1 2 3 4 5−1.5
−1
−0.5
0
0.5
1
1.5τ=0.3
czas
pozi
om s
atys
fakc
ji
RomeoJuliaParys
0 1 2 3 4 5−1.5
−1
−0.5
0
0.5
1
1.5τ=0.33
czas
pozi
om s
atys
fakc
ji
RomeoJuliaParys
0 1 2 3 4 5−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ=0.6
czas
pozi
om s
atys
fakc
ji
RomeoJuliaParys
0 1 2 3 4 5−1.5
−1
−0.5
0
0.5
1
1.5τ=0.69
czas
pozi
om s
atys
fakc
ji
RomeoJuliaParys
0 1 2 3 4 5−1.5
−1
−0.5
0
0.5
1
1.5τ=0.75
czas
pozi
om s
atys
fakc
ji
RomeoJuliaParys
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5τ=1.2
czas
pozi
om s
atys
fakc
ji
RomeoJuliaParys
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5τ=1.29
czas
pozi
om s
atys
fakc
ji
RomeoJuliaParys
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5τ=1.4
czas
pozi
om s
atys
fakc
ji
RomeoJuliaParys
Rysunek 3.1: Rozwi¡zanie dla ukªadu 3.4, dla ró»nych warto±ci pocz¡tkowych. Rysunki po±rodku obrazj¡kolejne bifurkacje Hopfa dla tego ukªadu.
35


Rozdziaª 4
Modele nieliniowe
4.1. Model Romeo - m¦»czyzna trudny
W tym rozdziale rozwa»aniom poddane zostaªy dwa modele nieliniowe. W ogólno±ci, analiza liczbyprzedziaªów stabilno±ci w zale»no±ci od parametrów ukªadu dla modeli nieliniowych jest skomplikowana.Jest to jednak dobra okazja ku temu, by zobrazowa¢ lepiej zjawisko asymptotycznej stabilno±ci w ukªadachdynamicznych i pokaza¢, jak taki ukªad zachowuje si¦ w zale»no±ci od parametrów, warunków pocz¡tkowychi opó¹nienia.Najpierw rozpatrzymy ukªad postaci
{r(t) = ar(t)[1− r(t)] + bj(t− τ)j(t) = cr(t− τ) + dj(t− τ)
(4.1)
Zakªadamy dodatkowo, »e macierz wspóªczynników(
a bc d
)
ma niezerowy wyznacznik, czyli ad− bc 6= 0, oraz »e wszystkie wspóªczynniki nie s¡ równe zeru.W tym modelu rozpatrujemy zwi¡zek Romea, który ma nieliniowy wzór reagowania na swój wªasny
poziom satysfakcji (czynnik a) i reaguje na« szybko. Jak wida¢, znak reakcji Romea mo»e by¢ zarównododatni, jak i ujemny przy danym znaku aktualnego stanu Romea r(t), co nazwiemy ambiwalencj¡. Romeojest tak»e reaktywny na poziom satysfakcji Julii z pewnym opó¹nieniem (czynnik b). Julia natomiastliniowo reaguje zarówno na wªasny poziom satysfakcji (czynnik d), jak i na poziom satysfakcji partnera(czynnik c), w obu przypadkach z pewnym opó¹nieniem. Zauwa»my, »e te równania zawieraj¡ czªonlogistyczny, omawiany we wst¦pie, ciekawe zatem, jak wygl¡da ewolucja takiego ukªadu w porównaniu zprzytoczonym wcze±niej przypadkiem prostego równania logistycznego.Stanów stacjonarnych szukamy jak poprzednio i otrzymujemy (r∗, j∗) = (0, 0) ∨ (ad−bc
ad , −c(ad−bc)ad2 ).
Zauwa»my, »e je±li cd > 0, to niezerowy stan stacjonarny przyjmuje dla Romea i Julii warto±ci przeciwnegoznaku, jednym sªowem - tylko jedno z tych dwojga mo»na uwa»a¢ za szcz¦±liwe. W przeciwnym wypadkuszcz¦±liwi s¡ oboje lub »adne z nich.
Na pocz¡tek przeanalizujemy warunki asymptotycznej stabilno±ci dla tych dwóch przypadków z os-obna, za pomoc¡ jedynej dost¦pnej tutaj metody, czyli kryterium Michajªowa.
1. Rozpatrzmy przypadek (r∗, j∗) = (0, 0). Linearyzacji dokonujemy przez proste podstawienie r := r,j := j, i otrzymujemy
{ ˙r(t) = ar(t)(1− r(t)) + bj(t− τ)˙j(t) = cr(t− τ) + dj(t− τ)
={ ˙r(t) = ar(t) + bj(t− τ)
˙j(t) = cr(t− τ) + dj(t− τ)(4.2)
Dla τ = 0 dostajemy równania analogiczne do ukªadu 2.8, a zatem stabilno±¢ wyst¡pi, gdy{
a + d < 0ad− bc > 0
(4.3)
37

Aby prze±ledzi¢, co si¦ dzieje dla niezerowego opó¹nienia, dokonujemy podstawienia wykªadniczego iotrzymujemy ukªad równa« {
(λ− a)r0 − be−λτ j0 = 0−ce−λτr0 + (λ− de−λτ )j0 = 0
sk¡d ju» równanieJ =
(λ− a −be−λτ
−ce−λτ λ− de−λτ
),
sk¡d wielomian|J | = w(λ) = λ2 + (−de−λτ − a)λ + ade−λτ − bce−2λτ (4.4)
Po podstawieniu λ := iω dostajemy posta¢ wielomianu, którego cz¦±¢ rzeczywista i urojona maj¡ posta¢jak poni»ej: {
Re[w(iω)] = −ω2 − d sin(ωτ)ω + ad cos(ωτ)− bc cos(2ωτ)Im[w(iω)] = −d cos(ωτ)ω − aω − ad sin(ωτ) + bc sin(2ωτ)
(4.5)
Dla ω = 0 dostajemy [w(iω)] = ad − bc ∈ R, zatem arg(w(0)) = 0 lub π. Dla ω � +∞ zachodziRe[w(iω)] � −∞, oraz Im[w(iω)] � ±∞, zale»nie od sgn(a), natomiast skªadnik Re[w(iω)] jest szybciejrozbie»ny do niesko«czono±ci ni» skªadnik Im[w(iω)], dlatego arg(w(iω)) = π + 2kπ.Zatem, aby zachodziªa stabilno±¢, musi by¢ arg[w(0)] = 0. Tutaj znajdziemy podprzedziaª dla maªych τ ,taki, »e jeszcze zachodzi dla niego stabilno±¢, metod¡ analizy znaku Im[w(iω)], tzn. znajdziemy takie τ ,»e Im[w(iω)] > 0 dla ka»dego ω.St¡d warunek konieczny ad− bc > 0, aby zachodziªa stabilno±¢, oraz mamy−d cos(ωτ)ω − aω − ad sin(ωτ) + bc sin(2ωτ) > 0, sk¡d dalej−d cos(ωτ)ω − aω > ad sin(ωτ)− bc sin(2ωτ) = sin(ωτ)(ad− 2bc cos(ωτ))i po przemno»eniu obu stron nierówno±ci przez (-1) otrzymujemy ci¡g wyra»e«(−|d|+ a)ω < (−d cos(ωτ) + a)ω < sin(ωτ)(−ad + 2bc cos(ωτ))Praw¡ stron¦ tej nierówno±ci mo»na ograniczy¢ z góry przez wyra»enie sin(ωτ)(−ad+2bc), o ile speªnionyjest warunek bc > 0, a st¡d mamy dalej(−|d|+ a)ω < sin(ωτ)(−ad + 2bc), i dla −ad + 2bc < 0 mo»na oszacowa¢ sin(ωτ) < (−|d|+a)ω
2bc−ad , sk¡d
τ <−|d|+ a
2bc− ad(4.6)
przy speªnionych warunkach ad > 0, bc > 0, ad > 2bc.2. Dla przypadku (r∗, j∗) = (ad−bc
ad , −c(ad−bc)ad2 ):
Po zlinearyzowaniu dostajemy{
˙r(t) = (2bcd − a)r(t) + bj(t− τ)
˙j(t) = cr(t− τ) + dj(t− τ), (4.7)
Podobnie jak poprzednio, przy opó¹nieniu równym zeru otrzymujemy zwykªy oscylator, w którym tªu-mienie wyst¡pi, gdy {
bc− ad > 01d(d2 + 2bc− ad) < 0
(4.8)
Zauwa»my, »e warunki 4.8 i 4.3 wzajemnie si¦ wykluczaj¡, co oznacza, »e dla bardzo maªych opó¹nie« conajwy»ej jeden z punktów stacjonarnych mo»e by¢ asymptotycznie stabilny.Po podstawieniu wykªadniczym dostajemy macierz
J =(
λ + a− 2bcd −be−λτ
−ce−λτ λ− de−λτ
)(r0
j0
)=
(00
)
38
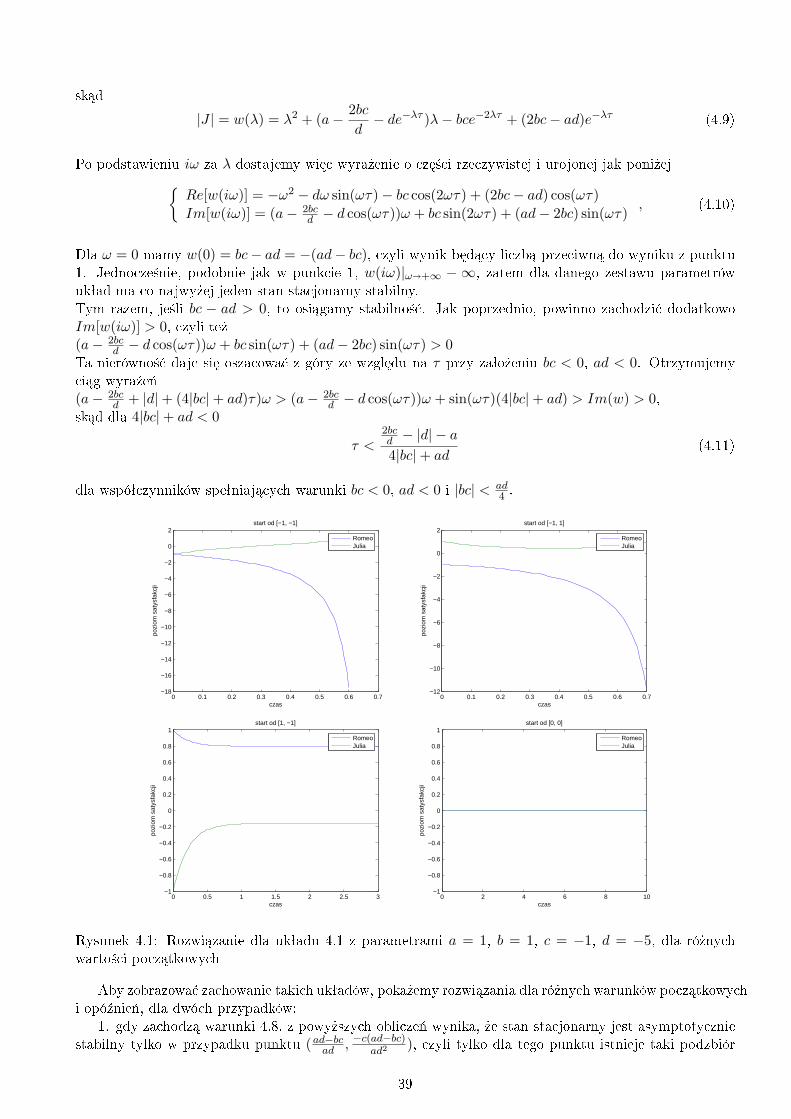
sk¡d|J | = w(λ) = λ2 + (a− 2bc
d− de−λτ )λ− bce−2λτ + (2bc− ad)e−λτ (4.9)
Po podstawieniu iω za λ dostajemy wi¦c wyra»enie o cz¦±ci rzeczywistej i urojonej jak poni»ej{
Re[w(iω)] = −ω2 − dω sin(ωτ)− bc cos(2ωτ) + (2bc− ad) cos(ωτ)Im[w(iω)] = (a− 2bc
d − d cos(ωτ))ω + bc sin(2ωτ) + (ad− 2bc) sin(ωτ), (4.10)
Dla ω = 0 mamy w(0) = bc− ad = −(ad− bc), czyli wynik b¦d¡cy liczb¡ przeciwn¡ do wyniku z punktu1. Jednocze±nie, podobnie jak w punkcie 1, w(iω)|ω�+∞ − ∞, zatem dla danego zestawu parametrówukªad ma co najwy»ej jeden stan stacjonarny stabilny.Tym razem, je±li bc − ad > 0, to osi¡gamy stabilno±¢. Jak poprzednio, powinno zachodzi¢ dodatkowoIm[w(iω)] > 0, czyli te»(a− 2bc
d − d cos(ωτ))ω + bc sin(ωτ) + (ad− 2bc) sin(ωτ) > 0Ta nierówno±¢ daje si¦ oszacowa¢ z góry ze wzgl¦du na τ przy zaªo»eniu bc < 0, ad < 0. Otrzymujemyci¡g wyra¹e«(a− 2bc
d + |d|+ (4|bc|+ ad)τ)ω > (a− 2bcd − d cos(ωτ))ω + sin(ωτ)(4|bc|+ ad) > Im(w) > 0,
sk¡d dla 4|bc|+ ad < 0
τ <2bcd − |d| − a
4|bc|+ ad(4.11)
dla wspóªczynników speªniaj¡cych warunki bc < 0, ad < 0 i |bc| < ad4 .
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−18
−16
−14
−12
−10
−8
−6
−4
−2
0
2start od [−1, −1]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7−12
−10
−8
−6
−4
−2
0
2start od [−1, 1]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 0.5 1 1.5 2 2.5 3−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1start od [1, −1]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1start od [0, 0]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
Rysunek 4.1: Rozwi¡zanie dla ukªadu 4.1 z parametrami a = 1, b = 1, c = −1, d = −5, dla ró»nychwarto±ci pocz¡tkowych
Aby zobrazowa¢ zachowanie takich ukªadów, poka»emy rozwi¡zania dla ró»nych warunków pocz¡tkowychi opó¹nie«, dla dwóch przypadków:
1. gdy zachodz¡ warunki 4.8, z powy»szych oblicze« wynika, »e stan stacjonarny jest asymptotyczniestabilny tylko w przypadku punktu (ad−bc
ad , −c(ad−bc)ad2 ), czyli tylko dla tego punktu istnieje taki podzbiór
39

0 2 4 6 8 10−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8start od [0,01, 0]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8start od [0,01, −0,01]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 1 2 3 4 5 6 7−4
−3
−2
−1
0
1
2start od [0, −0,01]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
Rysunek 4.2: Rozwi¡zanie dla ukªadu 4.1 z parametrami a = 1, b = 1, c = −1, d = −5, dla warto±cipocz¡tkowych le»¡cych blisko zera
otwarty (m,n)x(k, l) ∈ <x<, dla którego (r0, j0) = (r(0), j(0)) ∈ (m,n)x(k, l), i rozwi¡zanie jest zbie»nedo tego punktu.We¹my ukªad
a = 1b = 1c = −1d = −5
, (4.12)
speªniaj¡cy te warunki. Jest to model, w którym Romeo reaguje ambiwalentnie na swoje wªasne stany, orazpozytywnie na pozytywny stan Julii i negatywnie na jej negatywny stan, natomiast Julia jest osob¡ d¡»¡c¡do stanu równowagi i zarówno jej wªasny, jak i partnera poziom satysfakcji dziaªa na ni¡ stymuluj¡co,gdy jest ujemny, oraz chªodzi jej zadowolenie, gdy jest dodatni.
Niezerowy punkt stacjonarny ma warto±¢ (0, 8;−0, 16). Okazuje si¦ wi¦c, »e stan stacjonarny jestkorzystny dla Romea, czyli dla ambiwalentnego partnera, i niekorzystny dla Julii, przy czym warto±¢bezwzgl¦dna satysfakcji Romea jest wyra¹nie wi¦ksza ni» warto±¢ bezwzgl¦dna satysfakcji Julii, mo»nawi¦c s¡dzi¢, »e w naturze taki stan mógªby si¦ przez jaki± czas utrzyma¢ (tzn. stan, w którym jednoz partnerów jest bardzo zadowolone, a drugie tylko troch¦ niezadowolone). Mo»e to by¢ sytuacja, jakazdarza si¦ cz¦sto - gdy niezadowolona kobieta tkwi przy bardzo kapry±nym i ambiwalentnym m¦»czy¹nie.
Zbie»no±¢ do tego punktu dla zerowego opó¹nienia i ró»nych warunków pocz¡tkowych pokazuj¡ rysunkiA.1, A.2. Na rysunku A.2 wida¢ wyra¹nie brak zbie»no±ci do punktu (0, 0).
Jak wida¢, punkt (0, 0) nie le»y w zbiorze warto±ci pocz¡tkowych, z których mo»emy uzyska¢ zbie»no±¢do punktu stacjonarnego, nie jest to te» trzecia ¢wiartka <x<. Natomiast wychodz¡c z ka»dego innegopunktu osi¡gamy ten punkt stabilno±ci dla opó¹nienia równego 0.
We¹my teraz takie warunki pocz¡tkowe, aby ukªad byª zbie»ny do punktu (0, 8,−0, 16) dla τ = 0.Niech b¦dzie to punkt (1, 1). Dla tego punktu obejrzymy zmiany stabilno±ci w zale»no±ci od opó¹nienia.Za ka»dym razem jako warunek pocz¡tkowy (a, b) rozumiemy r(t) = a dla t ∈ (−τ, 0] oraz j(0) = b. Zsymulacji wynika, »e jest przynajmniej jedna taka zmiana, a punkt bifurkacji Hopfa i zachowanie ukªaduprzed i po pokazane s¡ na rysunku A.3.
2. gdy ukªad speªnia warunki 4.3, z oblicze« wynika, »e stan stacjonarny jest asymptotycznie stabilnytylko w przypadku punktu (0, 0). Poka»emy, »e istnieje taki przedziaª otwarty (m,n)x(k, l) ∈ <x<, dlaktórego (r0, j0) ∈ (m,n)x(k, l), i rozwi¡zanie jest zbie»ne do punktu (0, 0).We¹my ukªad 4.1 z parametrami
a = 1b = −4c = 1d = −2
(4.13)
Jest to model, w którym Romeo jest ambiwalentny w odbiorze wªasnych stanów, natomiast zadowolenieJulii bardzo chªodzi jego entuzjazm i na odwrót, natomiast Julia reaguje wzmo»eniem satysfakcji napozytywny stan Romea i odwrotnie, a wobec wªasnych stanów ma tendencj¦ do d¡»enia do równowagi.
Tutaj, zgodnie z wcze±niejszymi obliczeniami, dla rozwi¡zania stacjonarnego istnieje taki zbiór ot-warty warto±ci pocz¡tkowych wokóª (0, 0), dla którego rozwi¡zanie jest zbie»ne do (0, 0), oraz pewien
40
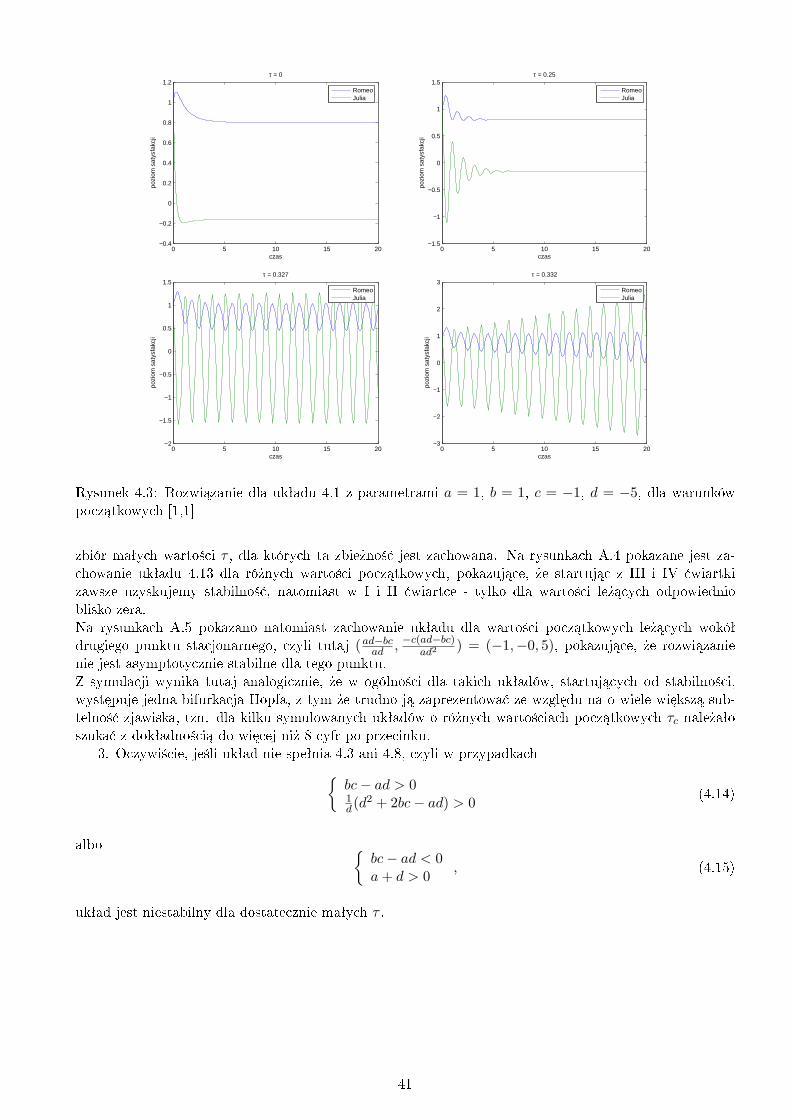
0 5 10 15 20−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2τ = 0
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−1.5
−1
−0.5
0
0.5
1
1.5τ = 0.25
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−2
−1.5
−1
−0.5
0
0.5
1
1.5τ = 0.327
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−3
−2
−1
0
1
2
3τ = 0.332
czas
pozi
om s
atys
fakc
ji
RomeoJulia
Rysunek 4.3: Rozwi¡zanie dla ukªadu 4.1 z parametrami a = 1, b = 1, c = −1, d = −5, dla warunkówpocz¡tkowych [1,1]
zbiór maªych warto±ci τ , dla których ta zbie»no±¢ jest zachowana. Na rysunkach A.4 pokazane jest za-chowanie ukªadu 4.13 dla ró»nych warto±ci pocz¡tkowych, pokazuj¡ce, »e startuj¡c z III i IV ¢wiartkizawsze uzyskujemy stabilno±¢, natomiast w I i II ¢wiartce - tylko dla warto±ci le»¡cych odpowiednioblisko zera.Na rysunkach A.5 pokazano natomiast zachowanie ukªadu dla warto±ci pocz¡tkowych le»¡cych wokóªdrugiego punktu stacjonarnego, czyli tutaj (ad−bc
ad , −c(ad−bc)ad2 ) = (−1,−0, 5), pokazuj¡ce, »e rozwi¡zanie
nie jest asymptotycznie stabilne dla tego punktu.Z symulacji wynika tutaj analogicznie, »e w ogólno±ci dla takich ukªadów, startuj¡cych od stabilno±ci,wyst¦puje jedna bifurkacja Hopfa, z tym »e trudno j¡ zaprezentowa¢ ze wzgl¦du na o wiele wi¦ksz¡ sub-telno±¢ zjawiska, tzn. dla kilku symulowanych ukªadów o ró»nych warto±ciach pocz¡tkowych τc nale»aªoszuka¢ z dokªadno±ci¡ do wi¦cej ni» 8 cyfr po przecinku.
3. Oczywi±cie, je±li ukªad nie speªnia 4.3 ani 4.8, czyli w przypadkach{
bc− ad > 01d(d2 + 2bc− ad) > 0
(4.14)
albo {bc− ad < 0a + d > 0
, (4.15)
ukªad jest niestabilny dla dostatecznie maªych τ .
41
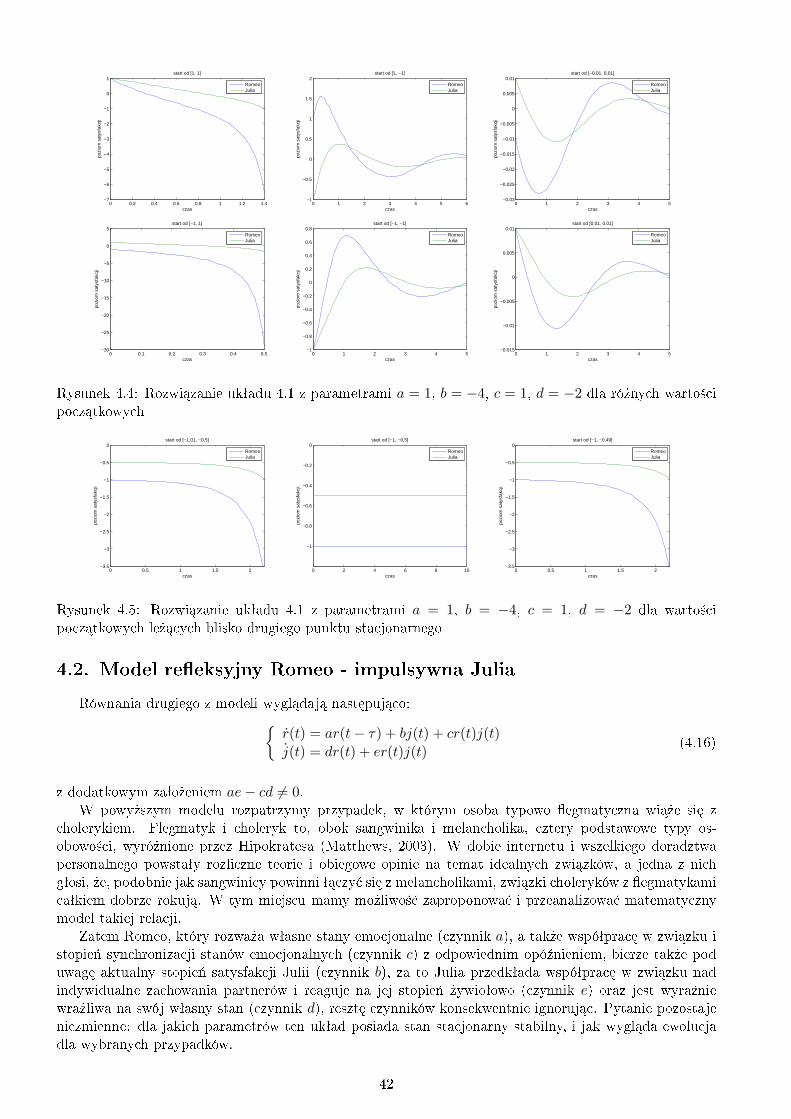
0 0.2 0.4 0.6 0.8 1 1.2 1.4−7
−6
−5
−4
−3
−2
−1
0
1start od [1, 1]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 1 2 3 4 5 6−1
−0.5
0
0.5
1
1.5
2start od [1, −1]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 1 2 3 4 5−0.03
−0.025
−0.02
−0.015
−0.01
−0.005
0
0.005
0.01start od [−0,01, 0,01]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 0.1 0.2 0.3 0.4 0.5−30
−25
−20
−15
−10
−5
0
5start od [−1, 1]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 1 2 3 4 5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8start od [−1, −1]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 1 2 3 4 5−0.015
−0.01
−0.005
0
0.005
0.01start od [0,01, 0,01]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
Rysunek 4.4: Rozwi¡zanie ukªadu 4.1 z parametrami a = 1, b = −4, c = 1, d = −2 dla ró»nych warto±cipocz¡tkowych
0 0.5 1 1.5 2−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0start od [−1,01, −0,5]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10
−1
−0.8
−0.6
−0.4
−0.2
0start od [−1, −0,5]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 0.5 1 1.5 2−3.5
−3
−2.5
−2
−1.5
−1
−0.5
0start od [−1, −0,49]
czas
pozi
om s
atys
fakc
ji
RomeoJulia
Rysunek 4.5: Rozwi¡zanie ukªadu 4.1 z parametrami a = 1, b = −4, c = 1, d = −2 dla warto±cipocz¡tkowych le»¡cych blisko drugiego punktu stacjonarnego
4.2. Model re�eksyjny Romeo - impulsywna JuliaRównania drugiego z modeli wygl¡daj¡ nast¦puj¡co:
{r(t) = ar(t− τ) + bj(t) + cr(t)j(t)j(t) = dr(t) + er(t)j(t)
(4.16)
z dodatkowym zaªo»eniem ae− cd 6= 0.W powy»szym modelu rozpatrzymy przypadek, w którym osoba typowo �egmatyczna wi¡»e si¦ z
cholerykiem. Flegmatyk i choleryk to, obok sangwinika i melancholika, cztery podstawowe typy os-obowo±ci, wyró»nione przez Hipokratesa (Matthews, 2003). W dobie internetu i wszelkiego doradztwapersonalnego powstaªy rozliczne teorie i obiegowe opinie na temat idealnych zwi¡zków, a jedna z nichgªosi, »e, podobnie jak sangwinicy powinni ª¡czy¢ si¦ z melancholikami, zwi¡zki choleryków z �egmatykamicaªkiem dobrze rokuj¡. W tym miejscu mamy mo»liwo±¢ zaproponowa¢ i przeanalizowa¢ matematycznymodel takiej relacji.
Zatem Romeo, który rozwa»a wªasne stany emocjonalne (czynnik a), a tak»e wspóªprac¦ w zwi¡zku istopie« synchronizacji stanów emocjonalnych (czynnik c) z odpowiednim opó¹nieniem, bierze tak»e poduwag¦ aktualny stopie« satysfakcji Julii (czynnik b), za to Julia przedkªada wspóªprac¦ w zwi¡zku nadindywidualne zachowania partnerów i reaguje na jej stopie« »ywioªowo (czynnik e) oraz jest wyra¹niewra»liwa na swój wªasny stan (czynnik d), reszt¦ czynników konsekwentnie ignoruj¡c. Pytanie pozostajeniezmienne: dla jakich parametrów ten ukªad posiada stan stacjonarny stabilny, i jak wygl¡da ewolucjadla wybranych przypadków.
42

Jak za chwil¦ poka»emy, posta¢ pseudowielomianu dla tego ukªadu jest podobna jak w przypadkuukªadów liniowych, i podobnie mo»na bada¢ mo»liw¡ liczb¦ zmian stabilno±ci, przeprowadzaj¡c analog-iczn¡ procedur¦, natomiast tutaj, ze wzgl¦du na istnienie dwóch ró»nych punktów stabilno±ci dla ukªadu,bardziej interesuj¡cy jest przypadek, gdy w zale»no±ci od warto±ci pocz¡tkowych w ukªadzie d¡»y on dojednego lub drugiego punktu stabilno±ci.
Znajdziemy wi¦c punkty stacjonarne tego ukªadu, dla ka»dego z punktów stacjonarnych przedziaª dlaopó¹nienia le»¡cy blisko zera i taki, »e ukªad jest dla tego przedziaªu τ stabilny, oraz zobaczymy, jakukªady zachowuj¡ si¦ dla ró»nych τ .
Punkty stacjonarne uzyskujemy przez przyrównanie do zera obu pochodnych w równaniach ukªadu iuzyskujemy (r∗, j∗) = (0, 0) lub ( bd
ae−cd ,−de ).
a) rozpatrzmy przypadek (r∗, j∗) = (0, 0). Ukªad jest od razu przesuni¦ty do zera, wi¦c upraszcza si¦do postaci { ˙r(t) = ar(t− τ) + bj(t)
˙j(t) = dr(t)(4.17)
Zauwa»my, »e jest to wersja ukªadu liniowego typu 2.11, który opracowali±my wcze±niej, i dla któregoa11 := a, a12 := b, a21 := d, a22 := 0.Przy τ = 0 otrzymujemy oscylator, dla którego tªumienie nast¦puje przy
{bd < 0a < 0
(4.18)
Jest to analog ukªadu 2.11, st¡d pseudowielomian charakterystyczny:
w(λ) = λ2 − a11e−λτλ− a12a21 = λ2 − ae−λτλ− bd (4.19)
b) dla przypadku (r∗, j∗) = ( bdae−cd ,−d
e ), linearyzujemy ukªad przez podstawienie{
r := r − bdae−cd
j := j + de
Po podstawieniu do 4.16, dostajemy{
˙r(t) = ar(t− τ) + abeae−cd j(t)− cd
e r(t)˙j(t) = bde
ae−cd j(t)(4.20)
To równie» jest typ ukªadu, który analizowali±my wcze±niej, tym razem 2.32 (dla a11 := a, a12 := abeae−cd ,
a13 := − cde , a21 := 0, a22 := bde
ae−cd), i równie» nadaje si¦ do analizy t¡ metod¡.Przy τ = 0 otrzymujemy oscylator, dla którego tªumienie nast¦puje przy
{a− cd
e + bdeae−cd < 0
bd > 0(4.21)
Jest to analog ukªadu 2.32, a zatem pseudowielomian charakterystyczny ma posta¢ w(λ) = λ2 + (−a22 −a13)λ + (−a11λ + a11a22)e−λτ + a13a22 − a12a21, sk¡d
w(λ) = λ2 + [−bde2 + acde− c2d2
e(ae− cd)]λ + (−aλ +
abde
ae− cd)e−λτ − bcd2
ae− cd(4.22)
Warto byªoby znale¹¢ takie parametry a, b, c, d, e, aby ukªad byª stabilny dla obu punktów równocze±nie,czyli dla tego samego τ . Niestety, nie jest to mo»liwe w zerze, poniewa» warunki stabilno±ci dla obu punk-tów stacjonarnych znów si¦ wykluczaj¡ (tzn. oba mog¡ by¢ naraz niestabilne w zerze, ale nie mog¡ obaby¢ stabilne).
Jedyna systematyczna metoda szukania takich ukªadów to numeryczne szukanie ukªadów wspóªczyn-ników, oddaj¡cych jedn¡ z dwóch mo»liwych sytuacji:
43

1. Gdy dla (0, 0) ukªad jest stabilny dla ka»dego τ , a dla niezerowego punktu stacjonarnego wyst¦pujeprzedziaª stabilno±ci (dwie zmiany);2. Gdy dla niezerowego punktu stacjonarnego ukªad jest stabilny dla ka»dego τ , a dla (0, 0) wyst¦pujeprzedziaª stabilno±ci.�adna inna metoda nie gwarantuje tutaj, »e istnieje τ , dla którego wyst¦puj¡ dwa punkty stabilno±cinaraz, poniewa» w sposób systematyczny da si¦ jedynie stwierdzi¢ liczb¦ zmian stabilno±ci, a nie punkty,w których te zmiany nast¦puj¡ (dlatego je±li dla obu punktów stacjonarnych dostajemy przedziaªy stabil-no±ci, jest maªe prawdopodobie«stwo, »e w pewnym momencie si¦ pokryj¡).
Niestety, ukªadu speªniaj¡cego »aden z powy»szych warunków nie udaªo si¦ numerycznie znale¹¢,mo»liwe wi¦c, »e w tym ukªadzie w ogóle nie zachodzi takie zjawisko. Warto jednak powiedzie¢ o tejmetodzie, poniewa» mo»e si¦ okaza¢ skuteczna przy analizie innych ukªadów, przy których warunki sta-bilno±ci w zerze dla punktów stacjonarnych wykluczaj¡ si¦ nawzajem.Dla porz¡dku, podamy tutaj zestaw warunków dla przypadku 1: dla punktu stacjonarnego (0, 0) stabilno±¢w zerze nast¡pi gdy {
bd < 0a < 0
,
oraz brak zmian stabilno±ci wyst¡pi, gdy dla odpowiadaj¡cej temu ukªadowi funkcji F (y) = y2 + (a222 −
a211+2a12a21)y+a2
12a221−a2
11a222 = y2+(2bd−a2)y+(bd)2, delta jest ujemna, czyli (2bd−a2)2−4(bd)2 < 0,
lub gdy funkcja ta ma dwa pierwiastki i oba ujemne, czyli gdy
(2bd− a2)2 − 4(bd)2 > 0a2 − 2bd < 0(bd)2 > 0
,
z czego ostatni warunek jest oczywi±cie zawsze speªniony.Natomiast dla punktu ( bd
ae−cd ,−de ) wyst¡pi przedziaª stabilno±ci, gdy odpowiadaj¡ca funkcja F (y) =
y2 + (a222 + a2
13 + 2a12a21 − a211)y + (a13a22 − a12a21)2 − (a11a22)2 b¦dzie miaªa dwa pierwiastki dodatnie,
czyli gdy
∆ > 0 : [ bdeae−cd
2+ ( cd
e )2 − a2]2 − 4( bcd2
ae−cd)2 + 4( abdeae−cd)2 > 0
y0y1 > 0 : ( bcd2
ae−cd)2 − ( abdeae−cd)2 > 0
y0 + y1 > 0 : a2 − ( bdeae−cd)2 − ( cd
e )2 > 0
oraz τ00 < τ10 < τ01, gdzie cos(ωiτi) = cd(ae−cd)2ω2i +cd(bde)2
ae(ae−cd)2ω2i +ae(bde)2
, sin(ωiτi) = −ωia , τi,j+1 = τi,j + 2π
ωi,
gdzie ω0 = (12(a2 − ( bde
ae−cd)2 − ( cde )2 −√∆))
12 , ω1 = (1
2(a2 − ( bdeae−cd)2 − ( cd
e )2 +√
∆))12 .
Wnioski:Dla maªych τ mamy, podobnie jak w przypadku poprzedniego modelu, zbie»no±¢ asymptotyczn¡ dla
co najwy»ej jednego punktu stacjonarnego, przez co pominiemy rysowanie wykresów dla tego ukªadu,poniewa» jest to sytuacja bardzo podobna do poprzedniej, natomiast mo»na w tym miejscu jeszczeprzeanalizowa¢ ten ukªad jako±ciowo.
Oczywi±cie, korzystna sytuacja to ta, w której uzyskujemy stabilno±¢, w której warto±¢ satysfakcjiobojga partnerów jest dodatnia. Ma to miejsce tylko dla ( bd
ae−cd ,−de ). Je±li chodzi o warto±¢ tego punktu
dla Romea, mo»liwe s¡ ró»ne kon�guracje znaków wspóªczynników, natomiast to, czy Julia mo»e by¢trwale zadowolona, zale»y, co ciekawe, tylko od niej samej, to jest dokªadnie jeden ze wspóªczynnikówd, e musi by¢ dodatni. Oznacza to, »e je±li u Julii nast¦puje pozytywna reakcja na poziom wspóªpracyw zwi¡zku (e > 0), to jednocze±nie szcz¦±cie samego Romea powinno studzi¢ jej entuzjazm (d < 0) iodwrotnie.
Warto równie» zauwa»y¢, »e w powy»szym modelu to strona impulsywna swoj¡ postaw¡ w peªnistanowi o swoim wªasnym samopoczuciu w stanie stabilnym, natomiast strona re�eksyjna jest od niejzale»na, tj. nastawienie Julii ma wpªyw na warto±¢ punktu stacjonarnego dla Romea, natomiast niedziaªa to w drug¡ stron¦.
Je±li chodzi o zbie»no±¢ do tego punktu dla maªych τ , warunkiem koniecznym jest bd > 0, z czegowynika, »e partnerzy nie mog¡ oboje wzmacnia¢ satysfakcji lub braku satysfakcji drugiego (b > 0, d > 0),ani oboje d¡»y¢ do równowagi, czyli reagowa¢ pozytywnie na brak satysfakcji i negatywnie na satysfakcj¦
44

u partnera (b < 0, d < 0). Jednym sªowem, w tym modelu obopólna satysfakcja w dªu»szej perspektywiemo»liwa jest tylko wtedy, je±li partnerzy maj¡ ró»ne nastawienie do siebie nawzajem.
45

Rozdziaª 5
Podsumowanie
Podsumowuj¡c rozwa»ania nad liniowymi i nieliniowymi ukªadami dynamicznymi z opó¹nieniem,mo»na powiedzie¢, »e nie zawsze prawd¡ jest, i» ka»de z partnerów musi reagowa¢ pozytywnym wz-mocnieniem na nastroje drugiego, aby zwi¡zek byª stabilny, nie jest te» prawd¡, »e musi by¢ na tyledojrzaªe, by szybko analizowa¢ wªasny stan czy stan drugiej osoby, mo»e te» by¢ wobec samego siebiedo±¢ ambiwalentne (patrz: model Romeo - m¦»czyzna trudny). Ciekawe zjawiska pojawiaj¡ si¦ zwªaszczatam, gdzie dokªadnie jedno z partnerów po±wi¦ca czas na re�eksj¦ nad samym sob¡ (jak we wszystkichmutacjach ukªadu typu 2.11, wzbogaconego o czªony bez opó¹nienia), poniewa» w takim wypadku mo»esi¦ okaza¢, »e jest kilka ró»nych stopni re�eksyjno±ci (kilka ró»nych przedziaªów opó¹nienia), w przypadkuktórych efekt dla funkcjonowania zwi¡zku jest korzystny, tj. nast¡pi stabilno±¢.
To obrazuje zªo»ono±¢ i ró»norodno±¢ ludzkich relacji, w których wa»na jest kon�guracja cech inawyków, co sprawia, »e nawet niedoskonaªe jednostki - kapry±ne, niezdecydowane, �egmatyczne, reagu-j¡ce z ró»nym znakiem w zale»no±ci od chwilowej koniunktury - s¡ w stanie ª¡czy¢ si¦ w pary. I, co»yciowe, cz¦sto losy zwi¡zku, i fakt, czy si¦ zawi¡»e, czy te» szybko si¦ rozpadnie, zale»y od warunkówpocz¡tkowych, czyli od stanu obu osób w chwili, gdy si¦ spotkaj¡. Jak pokazaª model 'Romeo - m»czyznatrudny', niekoniecznie spotkanie w momencie, w którym oboje zainteresowani maj¡ dobry nastrój, musidziaªa¢ na korzy±¢ stabilnego zwi¡zku, za to dobrze mo»e si¦ sko«czy¢ spotkanie drugiego w kªopotach.
47


Dodatek A
Przykªad ukªadu o trzech przedziaªachstabilno±ci
Przykªad ukªadu postaci {r(t) = a11r(t− τ) + a12j(t)j(t) = a21r(t) + a22j(t)
, (A.1)
a11 + a22 6= 0,o trzech przedziaªach stabilno±ci.Reasumuj¡c dost¦pne twierdzenia i warunki dotycz¡ce zmian stabilno±ci, aby otrzyma¢ trzy przedziaªystabilno±ci, potrzebujemy, by ukªad speªniaª ukªad nierówno±ci
∆(F ) > 0|a12a21| > |a11a22|a11 + a22 < 0a11a22 − a12a21 > 0a2
11 − a222 − 2a12a21 > 0
1ω1
arccos( a12a21a22
a11(ω21+a2
22)) < 1
ω0arccos( a12a21a22
a11(ω20+a2
22))
1ω0
arccos( a12a21a22
a11(ω20+a2
22)) < 1
ω1arccos( a12a21a22
a11(ω21+a2
22)) + 2π
ω11ω1
arccos( a12a21a22
a11(ω21+a2
22)) + 2π
ω1< 1
ω0arccos( a12a21a22
a11(ω20+a2
22)) + 2π
ω01ω0
arccos( a12a21a22
a11(ω20+a2
22)) + 2π
ω0< 1
ω1arccos( a12a21a22
a11(ω21+a2
22)) + 4π
ω1
Ukªad o wspóªczynnikach
a11 = −1.1456a12 = 3.7345a21 = −1.9965a22 = −0.9997
(A.2)
speªnia ten ukªad nierówno±ci, co obrazuj¡ obrazuj¡ poni»sze rysunki.
49
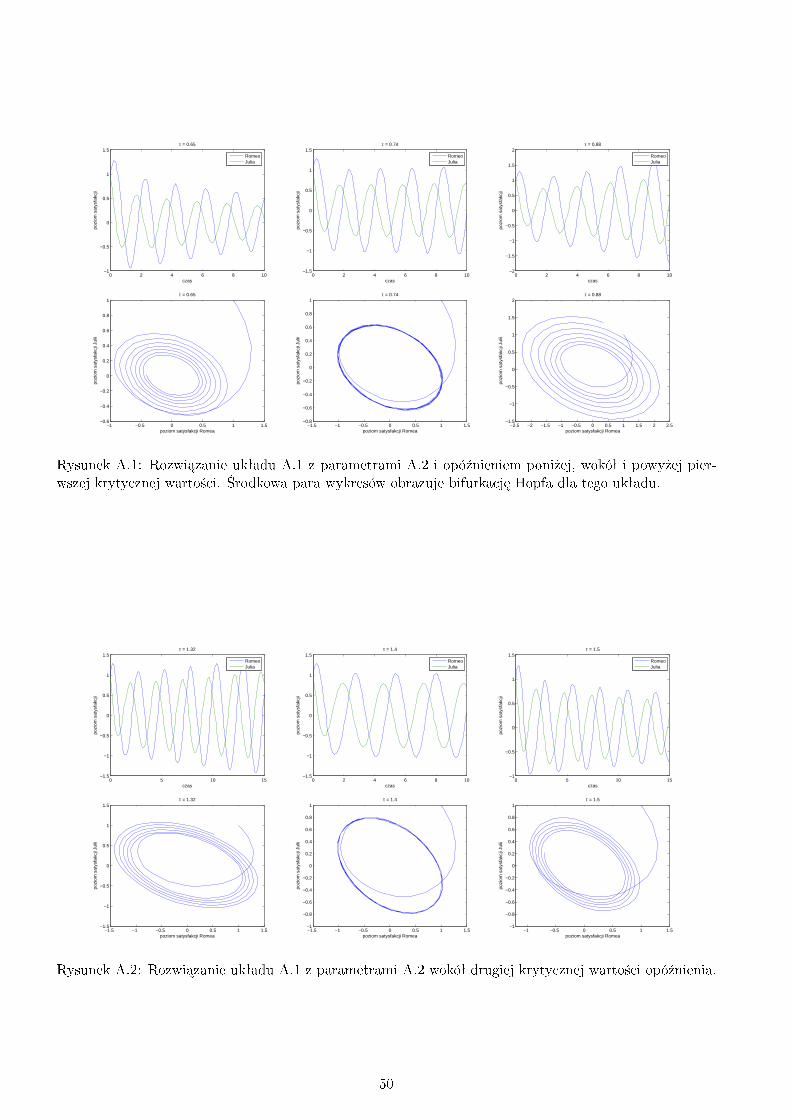
0 2 4 6 8 10−1
−0.5
0
0.5
1
1.5τ = 0.65
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5τ = 0.74
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10−2
−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 0.88
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1 −0.5 0 0.5 1 1.5−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1τ = 0.65
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1.5 −1 −0.5 0 0.5 1 1.5−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1τ = 0.74
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5−1.5
−1
−0.5
0
0.5
1
1.5
2τ = 0.88
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek A.1: Rozwi¡zanie ukªadu A.1 z parametrami A.2 i opó¹nieniem poni»ej, wokóª i powy»ej pier-wszej krytycznej warto±ci. �rodkowa para wykresów obrazuje bifurkacj¦ Hopfa dla tego ukªadu.
0 5 10 15−1.5
−1
−0.5
0
0.5
1
1.5τ = 1.32
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 2 4 6 8 10−1.5
−1
−0.5
0
0.5
1
1.5τ = 1.4
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15−1
−0.5
0
0.5
1
1.5τ = 1.5
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5τ = 1.32
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1.5 −1 −0.5 0 0.5 1 1.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1τ = 1.4
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1 1.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1τ = 1.5
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek A.2: Rozwi¡zanie ukªadu A.1 z parametrami A.2 wokóª drugiej krytycznej warto±ci opó¹nienia.
50
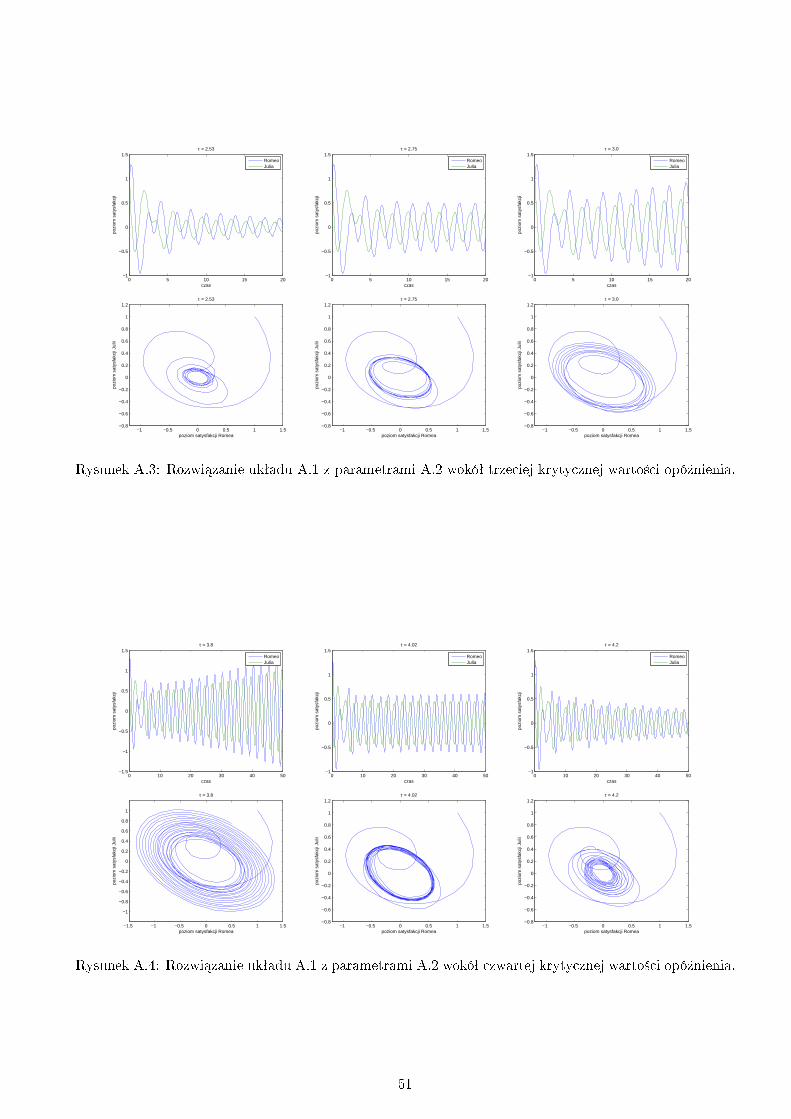
0 5 10 15 20−1
−0.5
0
0.5
1
1.5τ = 2.53
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−1
−0.5
0
0.5
1
1.5τ = 2.75
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 5 10 15 20−1
−0.5
0
0.5
1
1.5τ = 3.0
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1 −0.5 0 0.5 1 1.5−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2τ = 2.53
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1 1.5−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2τ = 2.75
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1 1.5−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2τ = 3.0
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek A.3: Rozwi¡zanie ukªadu A.1 z parametrami A.2 wokóª trzeciej krytycznej warto±ci opó¹nienia.
0 10 20 30 40 50−1.5
−1
−0.5
0
0.5
1
1.5τ = 3.8
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 10 20 30 40 50−1
−0.5
0
0.5
1
1.5τ = 4.02
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 10 20 30 40 50−1
−0.5
0
0.5
1
1.5τ = 4.2
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1.5 −1 −0.5 0 0.5 1 1.5
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
τ = 3.8
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1 1.5−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2τ = 4.02
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1 1.5−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2τ = 4.2
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek A.4: Rozwi¡zanie ukªadu A.1 z parametrami A.2 wokóª czwartej krytycznej warto±ci opó¹nienia.
51

0 10 20 30 40 50−1
−0.5
0
0.5
1
1.5τ = 4.5
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 10 20 30 40 50−1
−0.5
0
0.5
1
1.5τ = 4.91
czas
pozi
om s
atys
fakc
ji
RomeoJulia
0 10 20 30 40 50−1
−0.5
0
0.5
1
1.5τ = 5.1
czas
pozi
om s
atys
fakc
ji
RomeoJulia
−1 −0.5 0 0.5 1 1.5−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2τ = 4.5
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1 −0.5 0 0.5 1 1.5−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2τ = 4.91
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
−1.5 −1 −0.5 0 0.5 1 1.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
τ = 5.1
poziom satysfakcji Romea
pozi
om s
atys
fakc
ji Ju
lii
Rysunek A.5: Rozwi¡zanie ukªadu A.1 z parametrami A.2 wokóª pi¡tej krytycznej warto±ci opó¹nienia.
52
Bibliogra�a
[1] Aronson, E., Akert, R. M., Wilson, T. (2008). Social Psychology. Pearson Education Press.
[2] Asch, S. (1946). Forming impressions on personalities. Journal of Abnormal and Social Psychology,41, 259-290.
[3] Atkinson, J. W. (1957). Motivational determinants of risk-taking behavior. Psychological Review, 64,359-372.
[4] Atkinson, J. W. (1964). An introduction to motivation. Princeton, NJ: Van Nostrand.
[5] Bem, D.J. (1967). Self-perception: An alternative interpretation of cognitive dissonance phenomena.Psychological Review, 74, 183-200.
[6] Berbeka, J. (2005). Jako±¢ »ycia ludno±ci w województwie maªopolskim. Zeszyty naukowe nr 697,Akademia Ekonomiczna w Krakowie.
[7] Bandura, A. (1986). Social Foundations on thought and action. Englewood Cli�s, NJ: Prentice-Hall.
[8] Bielczyk, N., Skonieczna, J. (2008). Porównanie zastosowania kryterium Michajªowa i Nyquista wprzypadku modeli dynamiki populacji. Praca licencjacka pod kier. dr U. Fory±. UW, 2008.
[9] Bodnar, M., Fory±, U., Poleszczuk, J., Bielczyk, N. (2010). Delay Can Stabilise: Love A�air Dynam-ics. Krajowa Konferencja Zastosowa« Matematyki w Biologii i Medycynie, Krynica 2010.
[10] Cooke, K. L., van den Driessche, P. (1986). On Zeros of Some Transcendental Equations. FunkcialajEkvacioj, 29, 77-90.
[11] Felmlee, D. H., Greenberg, D. F. (1999). A dynamic systems model of dyadic interaction, Journal ofMathematical Sociology, 23(3): 155-180.
[12] Jones, E., Rock, L., Shaver, K., Goethals, G., Ward, L. (1968). Patterns of performance and abilityattribution: An unexpected primacy e�ect. Journal of Personality and Social Psychology, 10, 317-340.
[13] Kondo, T., Munakata, T. (2009). Stochastic resonance and self-tuning: a simple threshold system.Physical Review. Statistical, Non-linear, and soft matter physics, 79(6 Pt 1):061121.
[14] Latane, B. (1981). The psychology of social impact. American Psychologist, 36, 343-356.
[15] Latane, B., Nowak, A. (1994). Attitudes as catastrophes. From dimensions to categories with in-creasing involvement, Dynamical systems in social psychology (pp. 219-249). San Diego: AcademicPress.
[16] Lewicka, M. (1993). Aktor czy obserwator. Psychologiczne mechanizmy odchyle« od racjonalno±ci wmy±leniu potocznym. PTP. Warszawa-Olsztyn.
[17] Matthews, G., Ian, J., Whiteman, D., Whiteman, M. C. (2003). Personality traits. Cambridge Uni-versity Press.
[18] Miller, N., Campbell, D. (1959). Recency and primacy in persuasion as function of the timing ofspeeches and measurements. Journal of Abnormal and Social Psychology , 59, 1-9.
53
[19] Miller, N. (1994). Experimental studies of con�ict. Personality and the behavior disorders (pp. 431-465). New York: Ronald.
[20] Mischel, W., Shoda, Y. (1995). A cognitive-a�ective system theory of personality. Reconceptualizingsituations, dispositions, dynamics, and invariance in personality structure. Psychological Review, 102,246-268.
[21] Mylius, Sido. D. (1999). What Pair Formation Can Do to the Battle of the Sexes: Towards MoreRealistic Game Dynamics, Journal of Theoretical Biology, 197: 469-485.
[22] Nowak, A., Vallacher, Robin R. Dynamical Social Psychology, The Guilford Press, (New York, 1998).
[23] Orgördal, S., van Haren, E., Hauser, M., Ströhle, A., Bauer, M., Assion, H.J., Juckel, G. (2009).Early Mood Swings as Symptoms of the Bipolar Prodrome: Preliminary Results of a RetrospectiveAnalysis, Psychopatology, 42(5):337-342.
[24] Peradzy«ski, Z., Kurzyna, J. (2003). Chaotic oscillations for a nonlinear oscillator with time delay,From quanta to societies, 271-285.
[25] Piotrowska, M. J. (2007). A remark on the ODE with two discrete delays, Journal of MathematicalAnalysis and Applications 329: 664-676.
[26] Piotrowska, M. J. (2008). Hopf bifurcation in a solid avascular tumour growth model with two discretedelays, Mathematical and Computer Modelling, 47: 597-603.
[27] Skonieczna, J., Fory±, U. (2009). Stability switches for some class of delayed population models.Applicationes Mathematicae.
[28] Stevens, S. (1961). To honor Fechner and repeal his law. Science, 133, 80-86.
[29] Yerkes, R. M., Dodson, J. D. (1908). The relation of strength of stimulus to rapidity of habit forma-tion. Journal of Comparative Neurology and Psychology, 18, 459-482.
54