Dr Mikołaj Tomaszyk Wydział Nauk Politycznych i Dziennikarstwa UAM
Upload
tate-carverCategory
view
65download
0description

dr Stanisław Lewicki
Wydział Fizyki UAM
"Podstawy Elektroniki"
2
LITERATURA
Elektronika w laboratorium naukowym T. Stacewicz, A. Kotlicki, PWN, 1994 r. Elektronika bez wielkich problemów Otto Limann, Horst Pelka, WKŁ, 1991 r. Elementy i uklady elektroniczne w pytaniach i odpowiedziach M. Rusek, J. Pasierbinski WNT, 1997r.Układy i elementy elektroniczne St. Kuta;Podstawy elektroniki B. Pióro, M. Pióro , W.Sz.i P., 1996 r. Układy półprzewodnikowe U. Tietze, Ch. Schenk , WNT, 1996 r. Sztuka elektroniki P. Horowitz, W. Hill , WKŁ, 1992 r.

3
WSTĘP
4
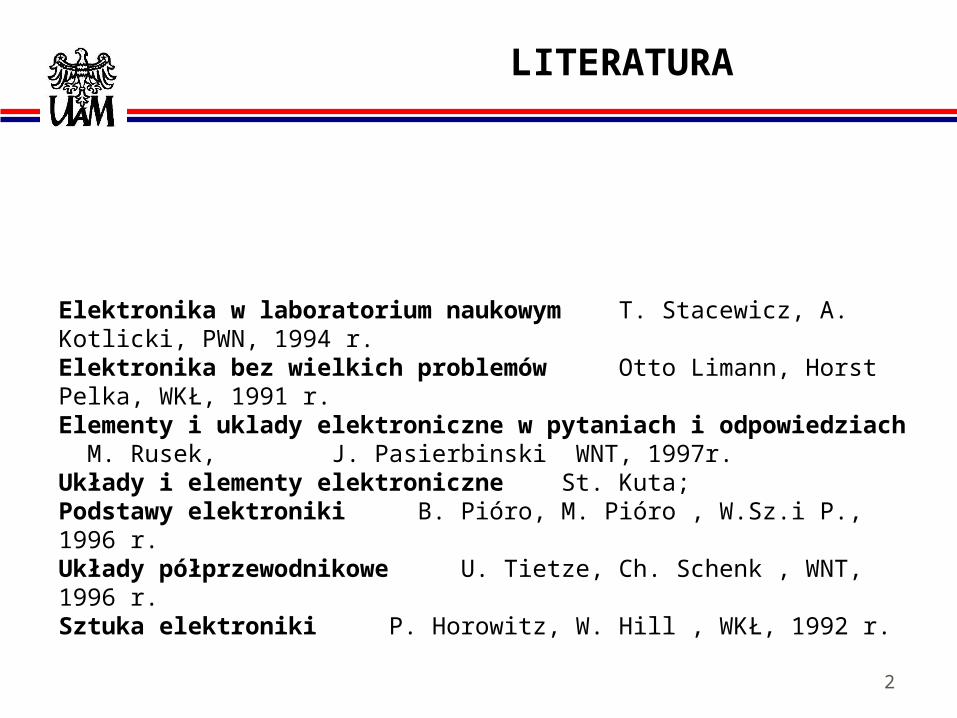
HISTORIA ELEKTROTECHNIKI
około 600 lat p.n.e
znane były (Grecja) właściwości rudy żelaznej (Fe3O4) - przyciągania przedmiotów żelaznych
i właściwości bursztynu, który potarty wełną przyciągał drobne lekkie przedmioty,
1600 lekarz William Gilbert stwierdził, że właściwości podobne do bursztynu posiadają również liczne inne ciała np. szkło i żywica. Uważał, że zjawiska elektryczne i magnetyczne są od siebie zupełnie niezależne,
1785 francuski fizyk Charles August Coulomb wyznaczył eksperymentalnie siłę oddziaływania na siebie ładunków elektrycznych,
1789 doświadczenie z żabimi udkami przeprowadzone przez lekarza włoskiego Luigi Galvaniego,
1799 zbudowanie przez Alessandro Volta pierwszego ogniwa i „stosu elektrycznego” będącego bateria szeregowo połączonych ogniw,
1800 elektroliza wody - Nicolson,
1802 łuk elektryczny - Pietrow,
1807 Davy odkrywa metale alkaliczne : sód i potas,
5
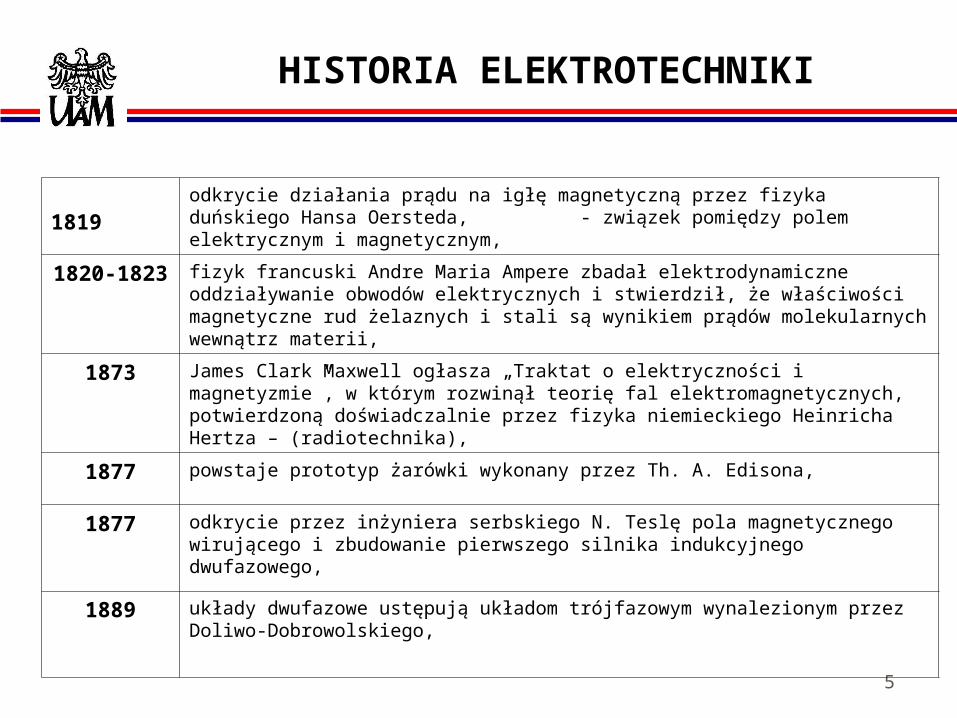
HISTORIA ELEKTROTECHNIKI
1819 odkrycie działania prądu na igłę magnetyczną przez fizyka duńskiego Hansa Oersteda, - związek pomiędzy polem elektrycznym i magnetycznym,
1820-1823 fizyk francuski Andre Maria Ampere zbadał elektrodynamiczne oddziaływanie obwodów elektrycznych i stwierdził, że właściwości magnetyczne rud żelaznych i stali są wynikiem prądów molekularnych wewnątrz materii,
1873 James Clark Maxwell ogłasza „Traktat o elektryczności i magnetyzmie”, w którym rozwinął teorię fal elektromagnetycznych, potwierdzoną doświadczalnie przez fizyka niemieckiego Heinricha Hertza – (radiotechnika),
1877 powstaje prototyp żarówki wykonany przez Th. A. Edisona,
1877 odkrycie przez inżyniera serbskiego N. Teslę pola magnetycznego wirującego i zbudowanie pierwszego silnika indukcyjnego dwufazowego,
1889 układy dwufazowe ustępują układom trójfazowym wynalezionym przez Doliwo-Dobrowolskiego,
6
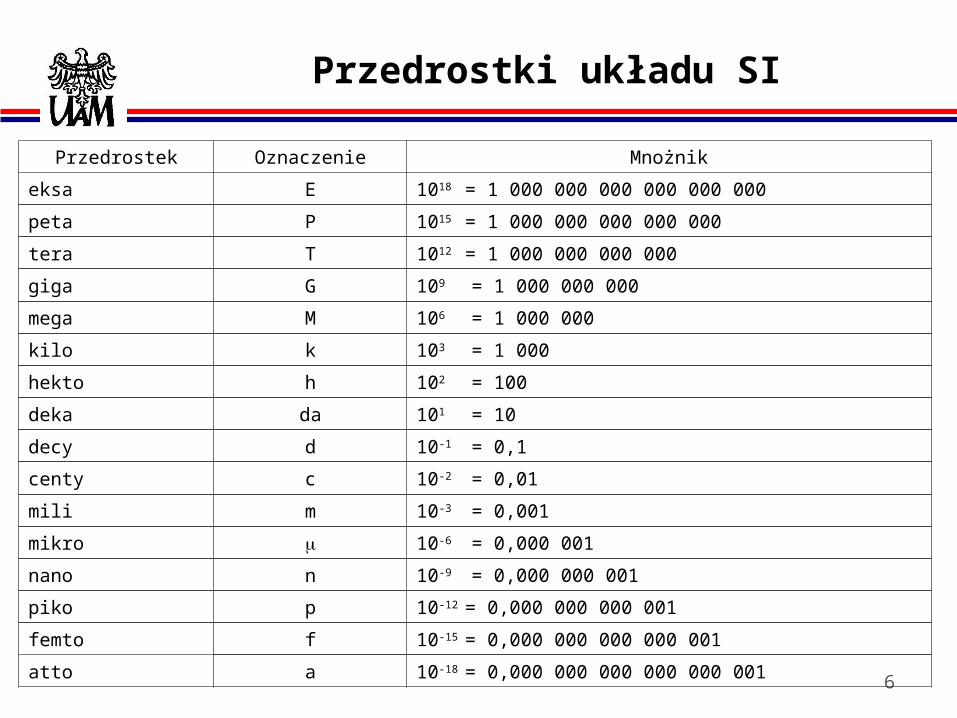
Przedrostki układu SI
Przedrostek Oznaczenie Mnożnik
eksa E 1018 = 1 000 000 000 000 000 000
peta P 1015 = 1 000 000 000 000 000
tera T 1012 = 1 000 000 000 000
giga G 109 = 1 000 000 000
mega M 106 = 1 000 000
kilo k 103 = 1 000
hekto h 102 = 100
deka da 101 = 10
decy d 10-1 = 0,1
centy c 10-2 = 0,01
mili m 10-3 = 0,001
mikro 10-6 = 0,000 001
nano n 10-9 = 0,000 000 001
piko p 10-12 = 0,000 000 000 001
femto f 10-15 = 0,000 000 000 000 001
atto a 10-18 = 0,000 000 000 000 000 001
7
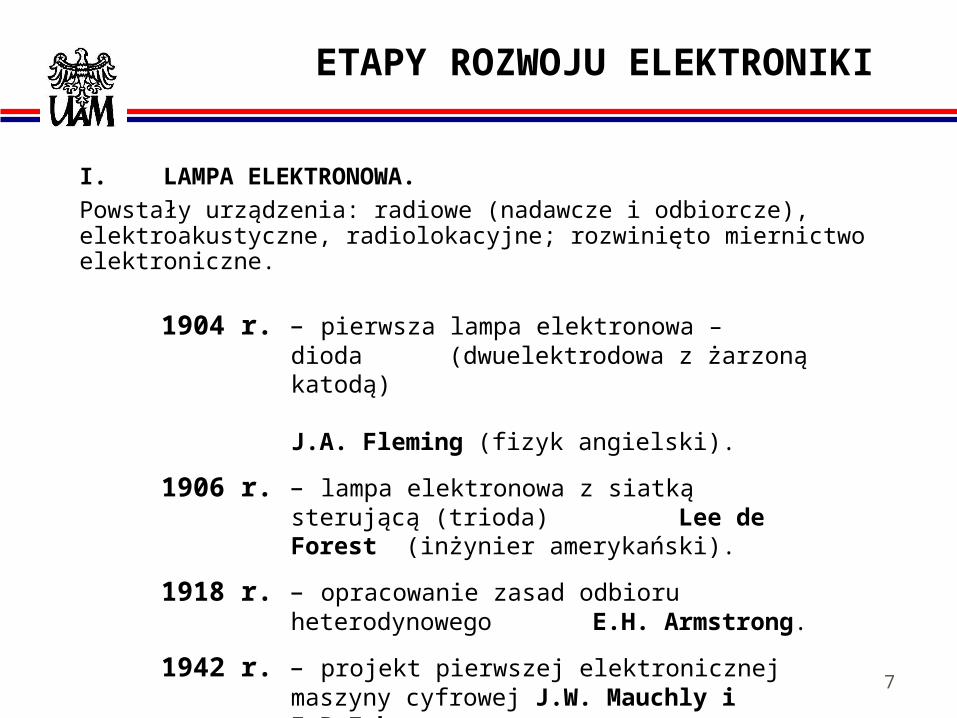
ETAPY ROZWOJU ELEKTRONIKI
I. LAMPA ELEKTRONOWA.Powstały urządzenia: radiowe (nadawcze i odbiorcze),
elektroakustyczne, radiolokacyjne; rozwinięto miernictwo elektroniczne.
1904 r. – pierwsza lampa elektronowa – dioda (dwuelektrodowa z żarzoną katodą) J.A. Fleming (fizyk angielski).
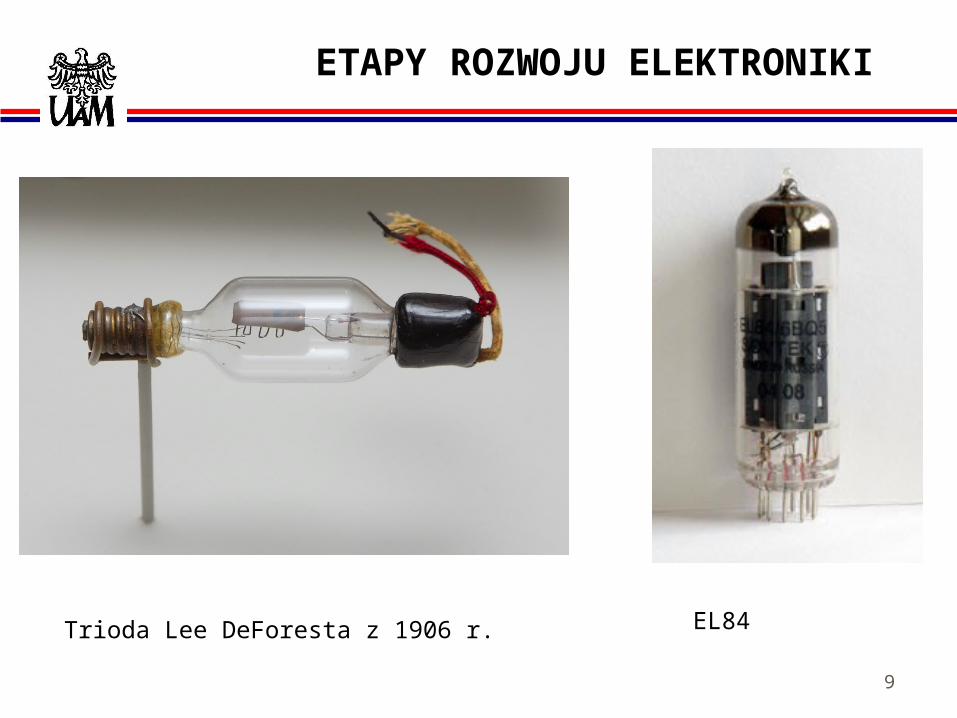
1906 r. – lampa elektronowa z siatką sterującą (trioda) Lee de Forest (inżynier amerykański).
1918 r. – opracowanie zasad odbioru heterodynowego E.H. Armstrong.
1942 r. – projekt pierwszej elektronicznej maszyny cyfrowej J.W. Mauchly i I.P.Eckert.
8
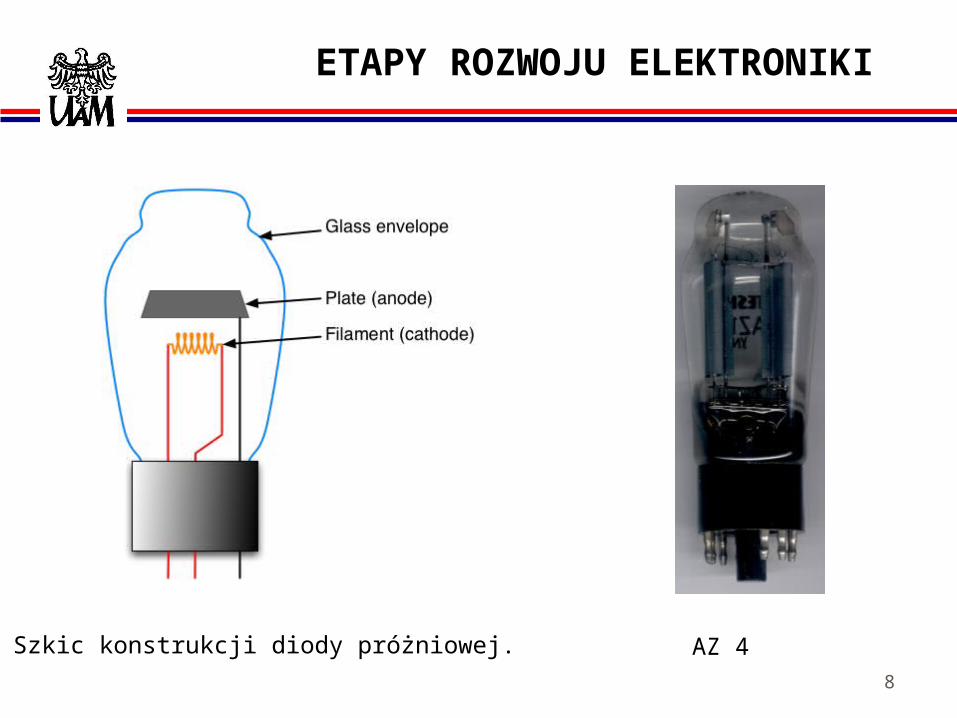
ETAPY ROZWOJU ELEKTRONIKI
Szkic konstrukcji diody próżniowej. AZ 4
9
ETAPY ROZWOJU ELEKTRONIKI
EL84Trioda Lee DeForesta z 1906 r.

10
ETAPY ROZWOJU ELEKTRONIKI
II. TRANZYSTOR
Odkrycie półprzewodników oraz wdrożenie produkcji elementów półprzewodnikowych spowodowało gwałtowny rozwój elektroniki.
Automatyzacja produkcji spowodowała poprawę jakości oraz zwiększenie asortymentu wyrobów.
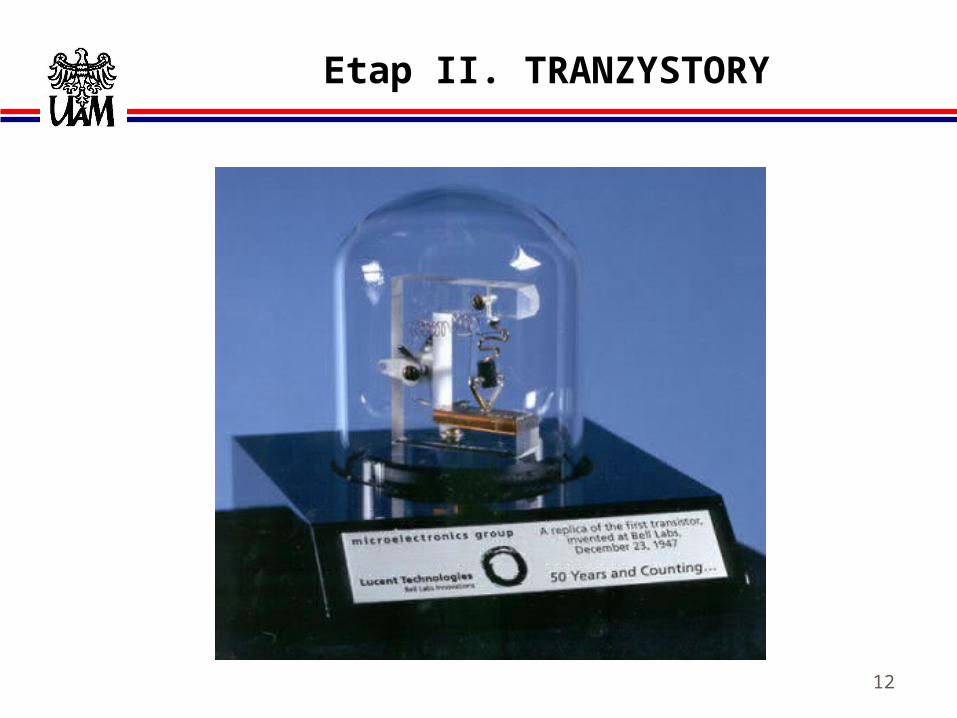
1947 r. – tranzystor bipolarny (Barden, Brattain i Shockley).
1952 r. – tranzystor polowy (unipolarny),
1958 r. – tyrystor.

11
Etap II. TRANZYSTORY
23 XII 1947
12
Etap II. TRANZYSTORY
13
ETAPY ROZWOJU ELEKTRONIKI
Miniaturyzacja elementów oraz ich zespolenie (integracja) w nierozbieralne urządzenia tzw. układy scalone to początek nowej technologii
MIKROELEKTRONIKI. Zaletami tej technologii są: niezawodność i taniość wyrobów.
III. UKŁAD SCALONY
14
Etap III . UKŁADY SCALONE
1958 r. – bipolarny układ scalony (KILBY). W Polsce pierwszy układ scalony wyprodukowano w 1961 r.
1962 r. – laser półprzewodnikowy,
1968 r. – polowy (unipolarny układ scalony),
15
Etap III . UKŁADY SCALONE
Ze względu na stopień scalenia występuje, w zasadzie historyczny, podział na układy:
* małej skali integracji (SSI - small scale of integration)
* średniej skali integracji (MSI - medium scale of integration)
* dużej skali integracji (LSI - large scale of integration)
* wielkiej skali integracji (VLSI - very large scale of integration)
* ultrawielkiej skali integracji (ULSI - ultra large scale of integration)

16
Etap III . UKŁADY SCALONE
17
Etap III . UKŁADY SCALONE

18
UKŁADY SCALONE
1961
RTL
19
UKŁADY SCALONE
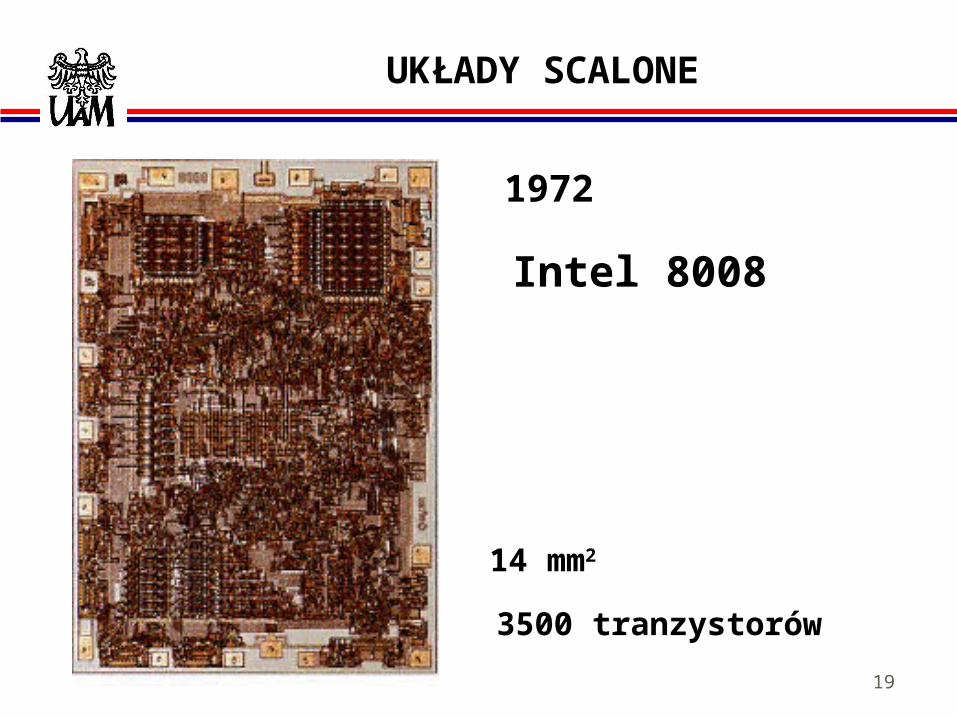
1972
3500 tranzystorów
Intel 8008
14 mm2
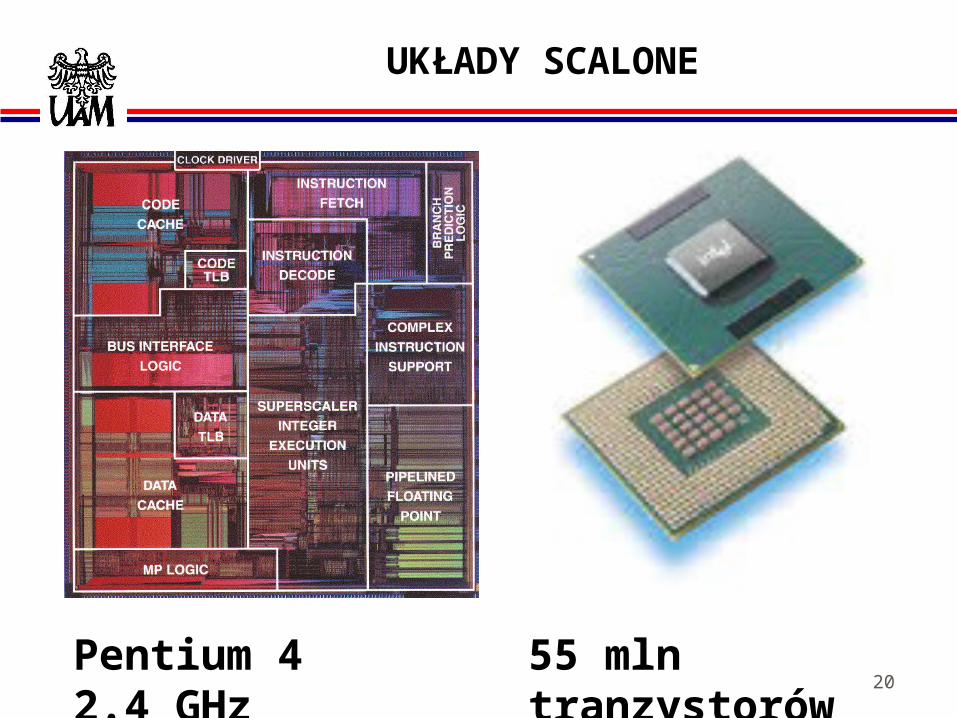
2055 mln tranzystorówPentium 4 2.4 GHz
UKŁADY SCALONE
21
PODSTAWOWE PRAWA
W układach elektronicznych obserwuje się i analizuje dwie wielkości:
napięcie (U ) oraz natężenie prądu elektrycznego ( I ).
22
Podstawowe prawa
PRĄD ELEKTRYCZNY =UPORZĄDKOWANY RUCH ŁADUNKÓW ELEKTRYCZNYCH.
I
23
ŁADUNEK ELEKTRYCZNY (Q)
Jednostka ładunku jest Kulomb [C ].
eC 1810*24,61
e jest ładunkiem elementarnym = ładunkowi elektronu.
24
NATĘŻENIE PRĄDU (I)
Natężeniem prądu elektrycznego lub krócej prądem elektrycznym nazywamy granicę stosunku wielkości ładunku elektrycznego q przenoszonego przez przekrój poprzeczny przewodnika do czasu t, gdy czas ten dąży do zera, tzn.
dt
dq
t
qi
t
0
lim
Prąd elektryczny jest wielkością skalarną. Jednostką natężenia prądu elektrycznego jest amper (1 A).
25
NATĘŻENIE PRĄDU (I)
s
CA
AsC
26
POTENCJAŁ (V)
Przy przesunięciu ładunku w polu elektrycznym wykonywana jest praca.
Pracę wykonaną podczas przemieszczenia ładunku jednostkowego (przypadającą na jednostkę ładunku) z danego punktu do nazywamy POTENCJAŁEM.
Potencjał punktu określany jest w woltach [V ].
C
JV
As
JV
27
NAPIĘCIE (U)
NAPIĘCIE - Różnica potencjałów.
Jednostką napięcia jest wolt [V].
Pomiędzy punktami panuje napięcie 1V, gdy praca wykonana przy przesunięciu ładunku 1C wynosi 1 J.
Napięcie oznaczane jest zwykle literą U. Napięcie między punktami A i B jest oznaczane jako UAB. Uzgodniono, że napięcie UAB jest dodatnie, gdy punkt A ma potencjał wyższy od punktu B.
28
PRAWO OHMA
W danym przewodniku, natężenie prądu jest proporcjonalne do napięcia na jego końcach.
PRAWO OHMA

29
PRAWO OHMA
gdzie:
I ~ UGUI
1G
R
30
PRAWO OHMA
R
UI
I
UR
IRU
31
PRAWO OHMA
R
UI
natężenie prądu I w przewodniku jest
i odwrotnie proporcjonalne do jego oporności R.
wprost proporcjonalne do napięcia U na jego końcach
32
PRAWO OHMA
RIU płynący w przewodniku (oporniku) prąd wywołuje spadek napięcia proporcjonalny do oporności przewodnika
33
PRAWO OHMA
I
UR
stosunek napięcia na końcach przewodnika do natężenia płynącego w nim prądu
jest stały
34
PRAWO OHMA
S
lR
Oporność przewodnika zależy od rodzaju materiału ( ); jest wprost proporcjonalna do jego długości (l ) i odwrotnie proporcjonalna do pola przekroju poprzecznego (S ).
35
PRAWO OHMA
Temperaturową zmianę oporności opisuje wzór:
010
TTRR TT
gdzie: RT - rezystancja w temperaturze T; RTo - rezystancja w temperaturze T0 = 293 K (20 °C); - współczynnik temperaturowy (jednostka 1/K).
36
OPORNOŚĆ
37
OPORNOŚĆ
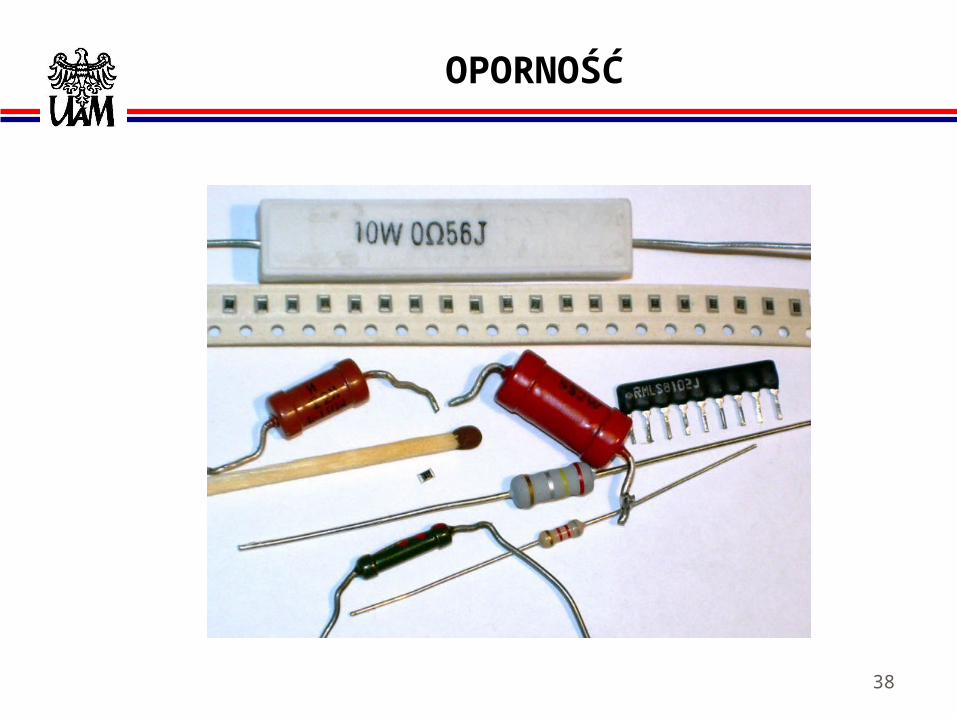
38
OPORNOŚĆ
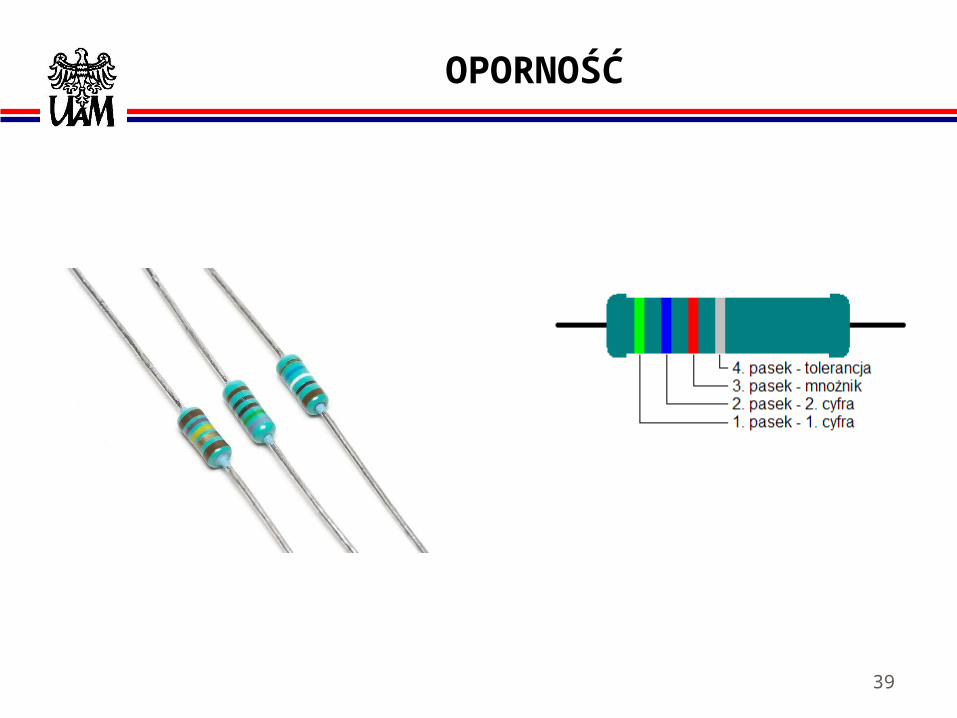
39
OPORNOŚĆ
40
PARAMETRY REZYSTORÓW
Rezystancja nominalna
Tolerancja (klasa dokładności)
Moc znamionowa
Napięcie graniczne
Temperaturowy współczynnik rezystancji
Współczynnik szumów

41
PRAWA KIRCHHOFFA
Suma prądów wpływających do węzła jest równa sumie prądów z niego wypływających.
0IPierwsze prawo Kirchhoffa:
Suma prądów w węźle jest równa zero.
R1
R2
R3
I2
I1
I3
A.Węzłem jest punkt A.
Prądy wpływające do węzła mają znak dodatni, a wypływające znak ujemny.
0321 IIII
42
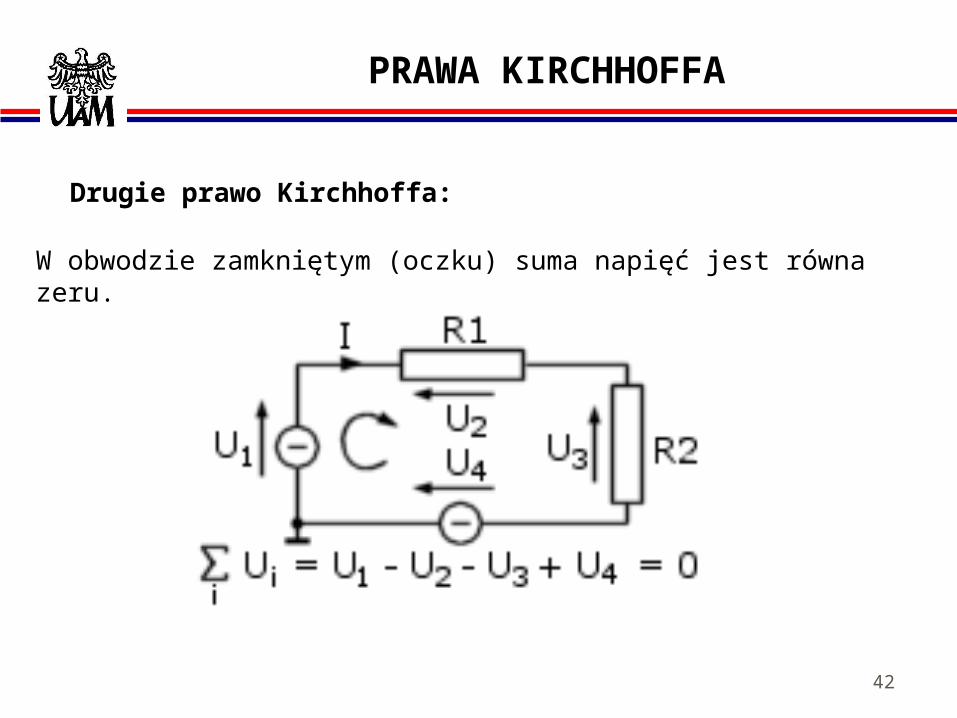
PRAWA KIRCHHOFFA
W obwodzie zamkniętym (oczku) suma napięć jest równa zeru.
Drugie prawo Kirchhoffa:
43
POMIAR
AMPEROMIERZ
VOLTOMIERZ
44
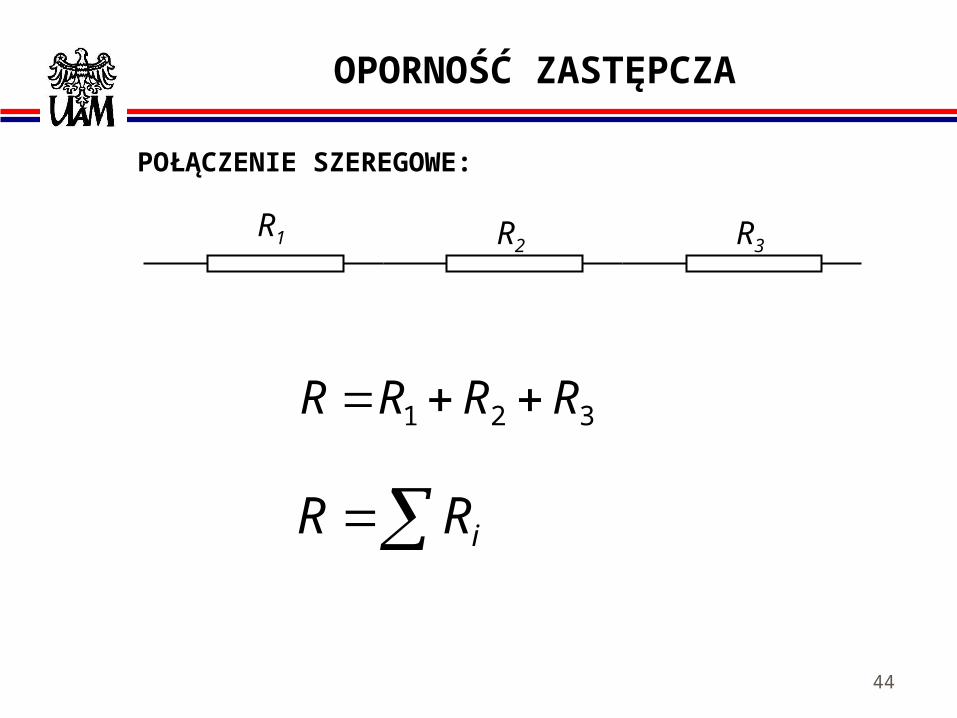
OPORNOŚĆ ZASTĘPCZA
POŁĄCZENIE SZEREGOWE:
iRR
R1 R2 R3
321 RRRR
45
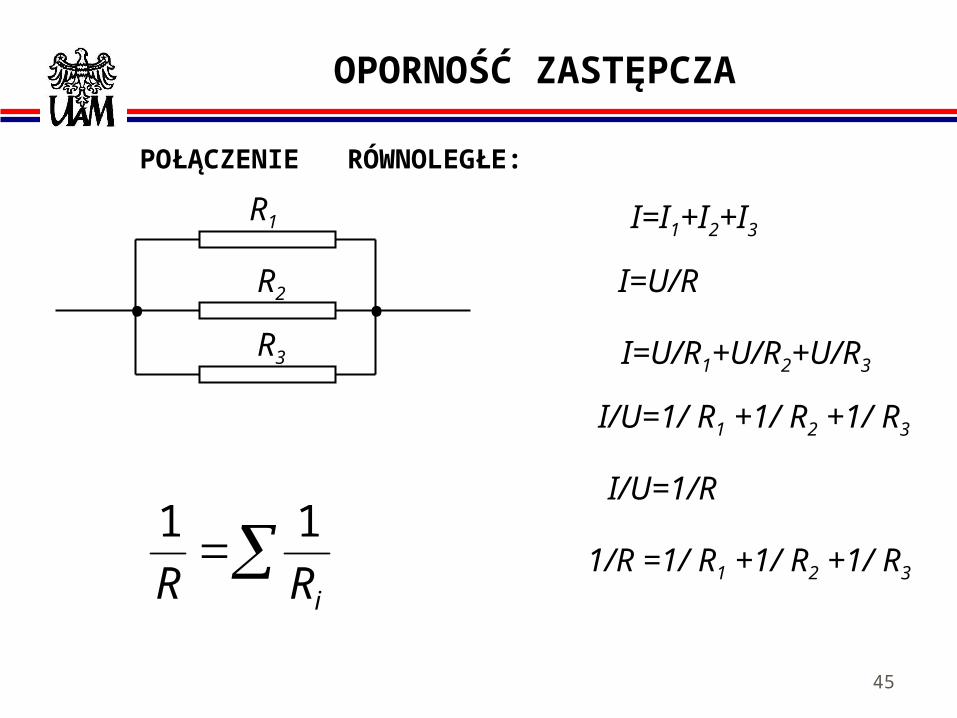
OPORNOŚĆ ZASTĘPCZA
POŁĄCZENIE RÓWNOLEGŁE:
iRR
11
R1
R3
R2. .I=U/R1+U/R2+U/R3
I=U/R
I=I1+I2+I3
I/U=1/ R1 +1/ R2 +1/ R3
I/U=1/R
1/R =1/ R1 +1/ R2 +1/ R3
46
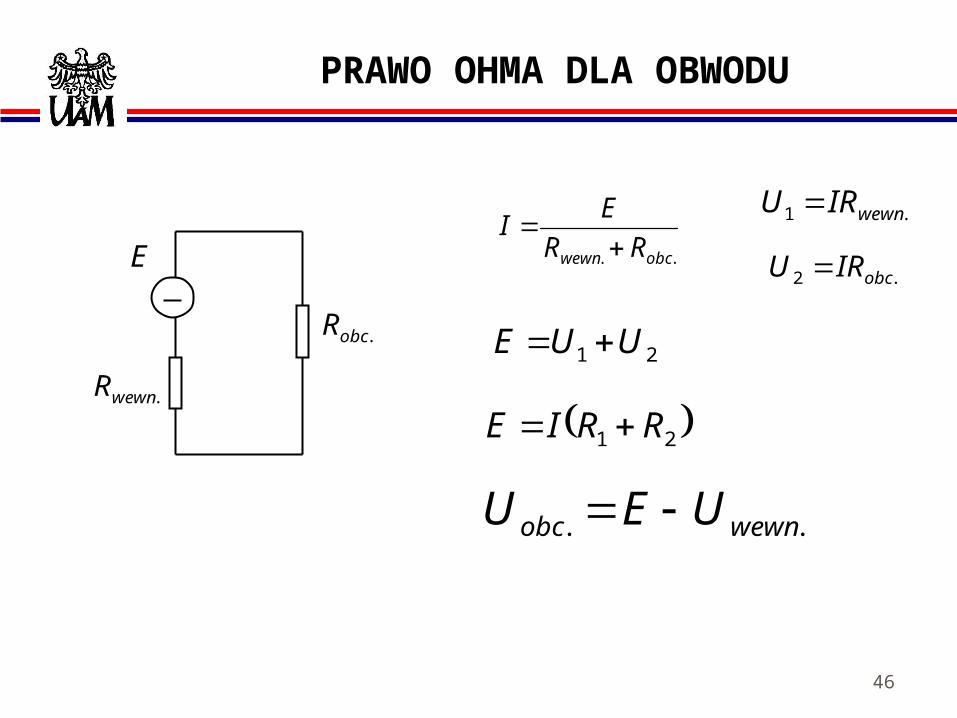
PRAWO OHMA DLA OBWODU
.. obcwewn RR
EI
21 RRIE
21 UUE
.1 wewnIRU
.2 obcIRU E
.wewnR
.obcR
.. wewnobc UEU
47
PRACA PRĄDU. ENERGIA.
JWs
UQL ItQ
UItL Jednostką pracy prądu elektrycznego (energii
elektrycznej) jest watosekunda:
VAsWs

48
MOC
Moc urządzenia to jego zdolność do wykonania pracy, tzn. stosunek ilości pracy do czasu w jakim została ona wykonana.
UIt
UItP
Jednostką mocy prądu elektrycznego jest wat.
s
JW
t
LP
49
MOC
RIP 2R
UP
2
R
PU
Podczas przepływu prądu przez opór na nim wydziela się ciepło. Moc stratna ciepło można wyznaczyć ze wzorów:
P
UR
2
UIP
50
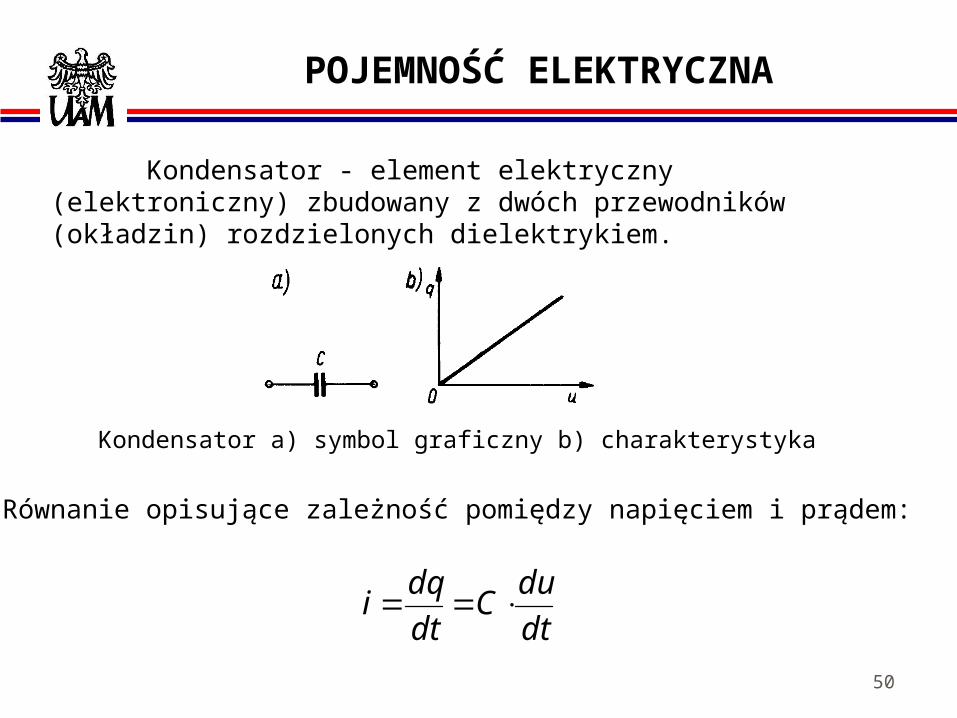
POJEMNOŚĆ ELEKTRYCZNA
Kondensator a) symbol graficzny b) charakterystyka
Równanie opisujące zależność pomiędzy napięciem i prądem:
dt
duC
dt
dqi
Kondensator - element elektryczny (elektroniczny) zbudowany z dwóch przewodników (okładzin) rozdzielonych dielektrykiem.
51
POJEMNOŚĆ ELEKTRYCZNA
POJEMNOŚĆ KONDENSATORA PŁASKIEGO:
d
SkC

52
POJEMNOŚĆ ELEKTRYCZNA

53
POJEMNOŚĆ ELEKTRYCZNA
54
POJEMNOŚĆ ELEKTRYCZNA
55
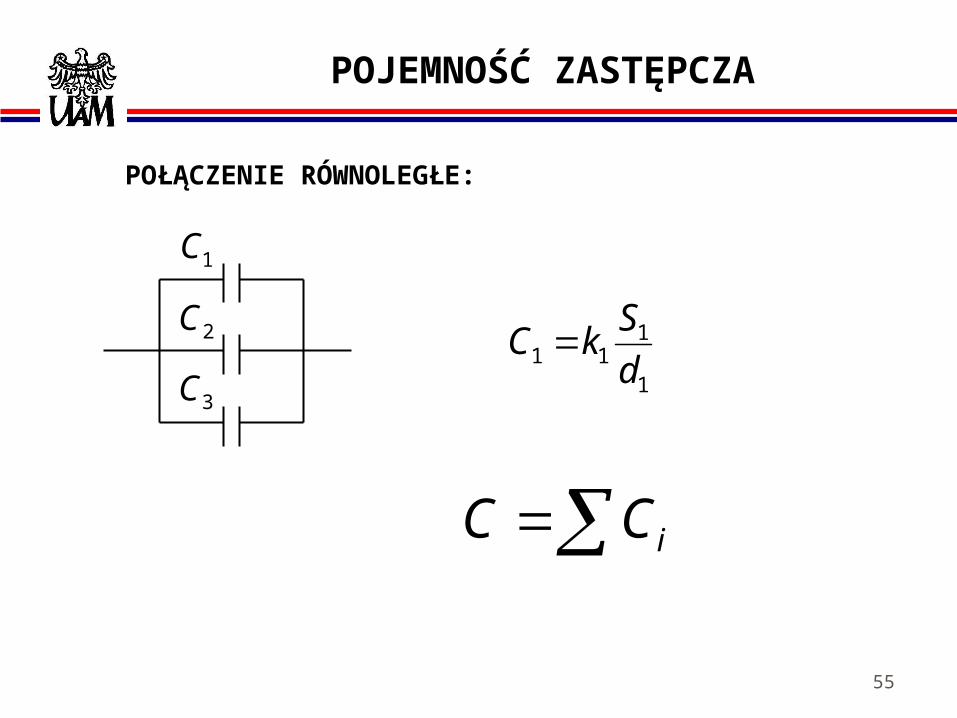
POJEMNOŚĆ ZASTĘPCZA
POŁĄCZENIE RÓWNOLEGŁE:
iCC
1C
2C
3C 1
111 d
SkC
56
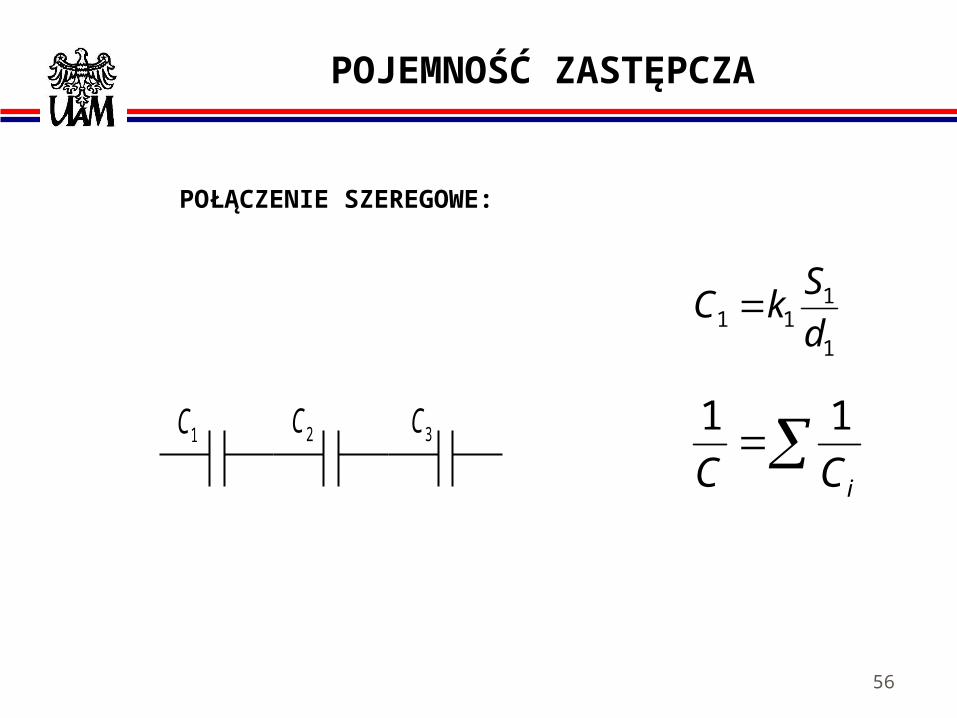
POJEMNOŚĆ ZASTĘPCZA
POŁĄCZENIE SZEREGOWE:
iCC
111C 2C 3C
1
111 d
SkC
57
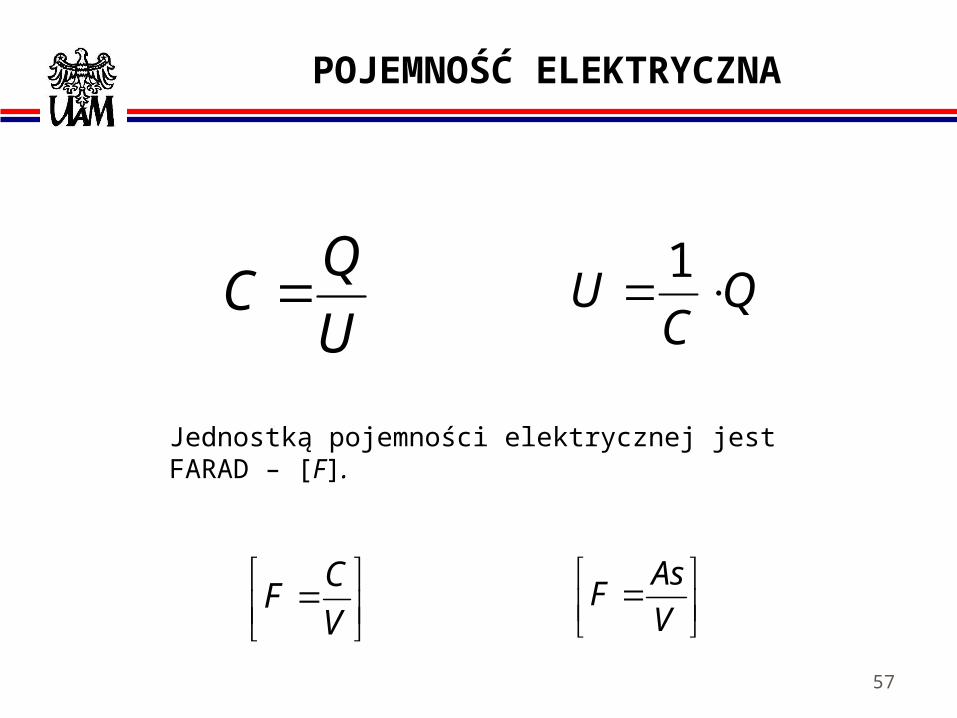
POJEMNOŚĆ ELEKTRYCZNA
U
QC
V
CF
V
AsF
Jednostką pojemności elektrycznej jest FARAD – [F].
QC
U 1

58
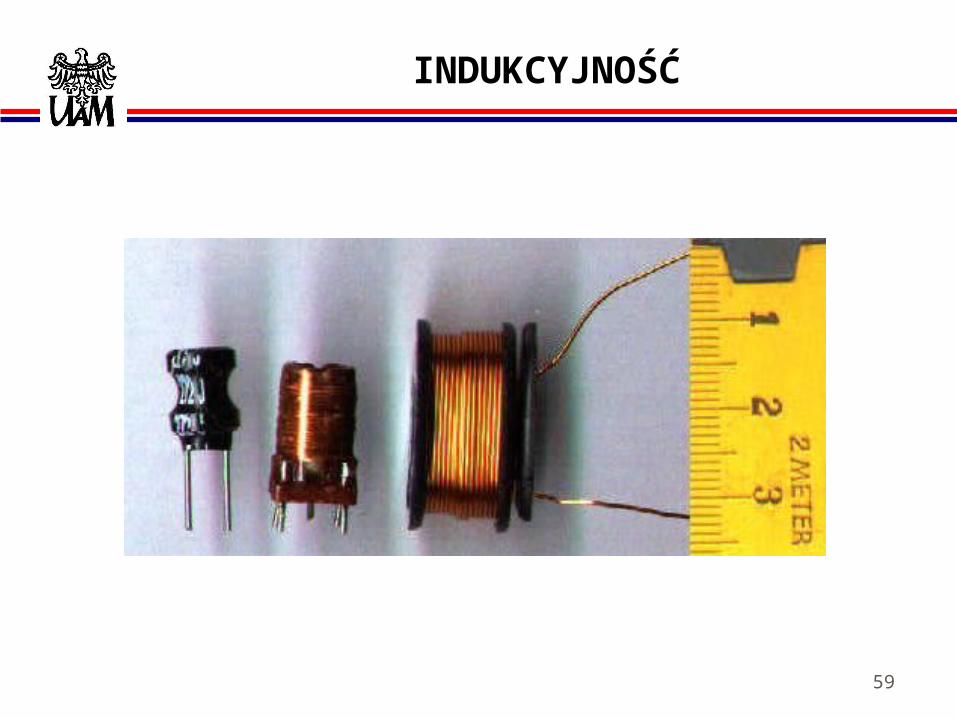
INDUKCYJNOŚĆ
sH
Cewka zwana również induktorem.
Jej właściwości opisuje indukcyjność własna L wyrażona stosunkiem wytworzonego w niej strumienia magnetycznego do natężenia płynącego przez nią prądu i.
iL
Jednostką indukcyjności jest henr :
A
VsH
59
INDUKCYJNOŚĆ

60
INDUKCYJNOŚĆ
dt
diL
dt
du
Cewka a) symbol graficzny b) charakterystyka
Równanie opisujące zależność pomiędzy napięciem i prądem w cewce:
61
PRĄD PRZEMIENNY (ZMIENNY)
tIti cos0
tUtu cos0
PRĄD PRZEMIENNY (ZMIENNY)
62
PRĄD PRZEMIENNY (ZMIENNY)
tjIti exp0
tjUtu exp0
63
LICZBY ZESPOLONE
Jednostka urojona. 1j
Postać ogólna liczby zespolonej:
a j
64
LICZBY ZESPOLONE
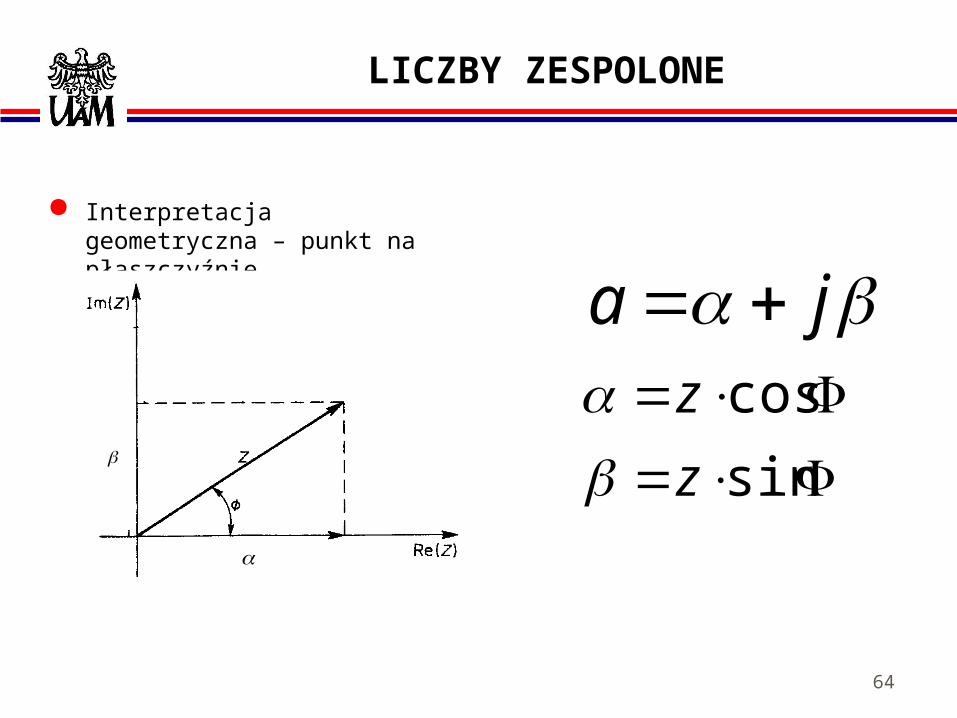
Interpretacja geometryczna – punkt na płaszczyźnie
sinz
a j cosz
65
LICZBY ZESPOLONE
Postać trygonometryczna liczby zespolonej:
*(cos sin )a z j
Postać wykładnicza liczby zespolonej:
*expa z j
66
LICZBY ZESPOLONE
Przykłady liczb zespolonych:
13
1 3
1 12 cos sin
3 3
2j
a j
a j
a e
67
LICZBY ZESPOLONE
Działania algebraiczne na liczbach zespolonych:
Dodawanie i odejmowanie:
1 1 2 2 1 2 1 2j j j
68
LICZBY ZESPOLONE
Mnożenie:
1 1 2 2 1 2 1 2 1 2 1 2j j j
1 1 1 2 2 2
1 2 1 2 1 2
cos sin cos sin
cos sin
z j z j
z z j
69
LICZBY ZESPOLONE
Dzielenie:
1 1 1 2 1 2 2 1 1 2
2 2 2 22 2 2 2 2 2
jj
j
70
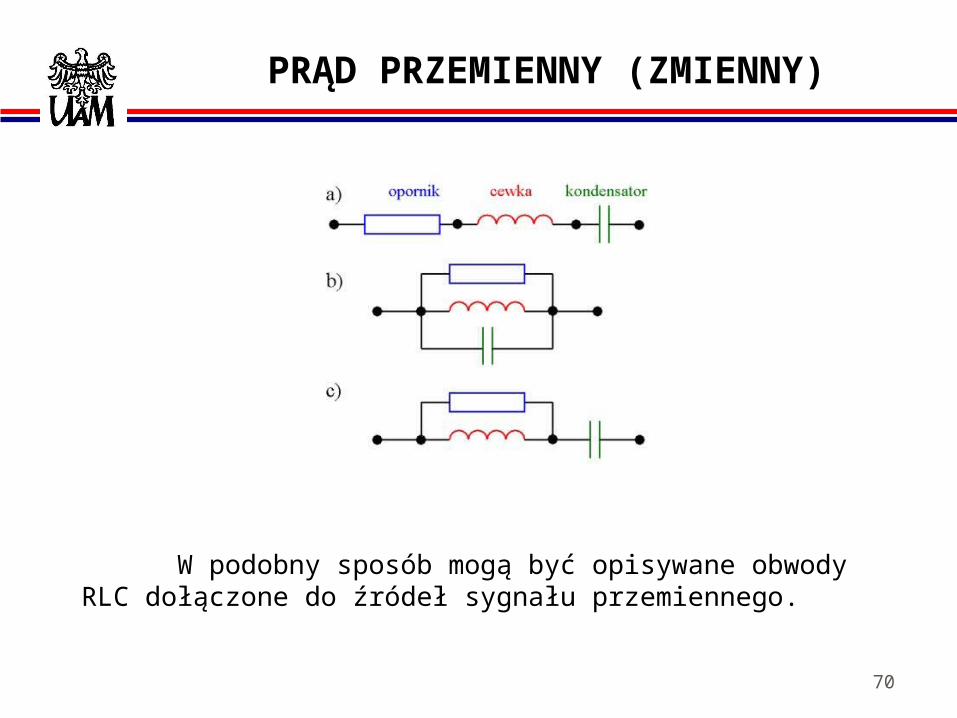
PRĄD PRZEMIENNY (ZMIENNY)
W podobny sposób mogą być opisywane obwody RLC dołączone do źródeł sygnału przemiennego.
71
PRĄD PRZEMIENNY (ZMIENNY)
72
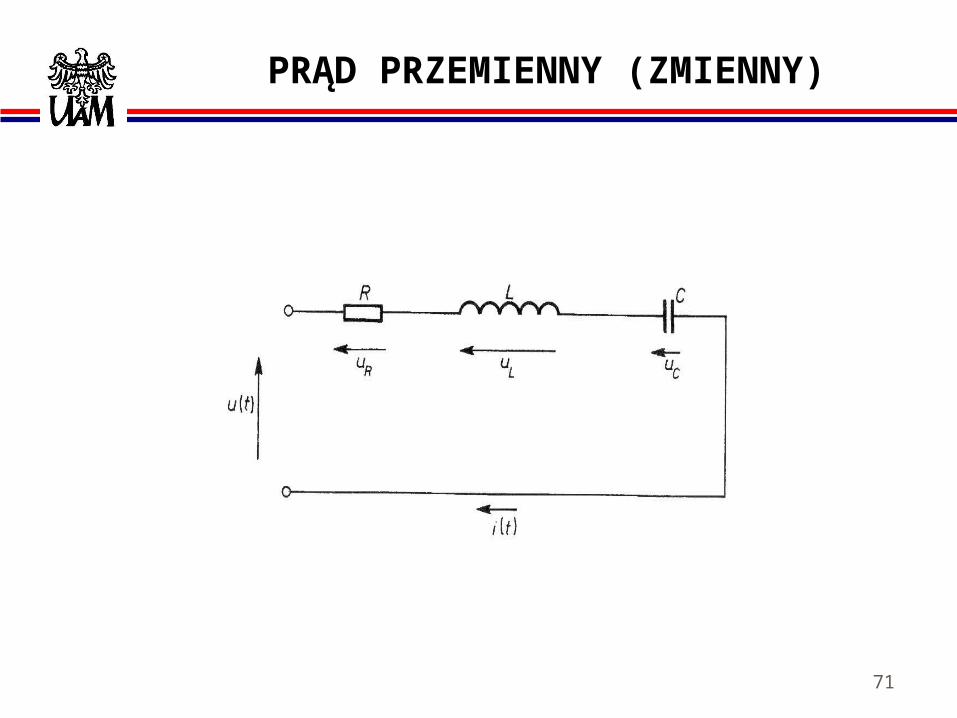
PRĄD PRZEMIENNY (ZMIENNY)
Przepływ prądu przez oporność (R), indukcyjność (L) i pojemność (C) wywołuje spadki napięcia określone wzorami:
,
dt
tdiLtuL
.1
dttiC
tuc
tRituR
73
PRĄD PRZEMIENNY (ZMIENNY).
W obwodzie zamkniętym:
dttiCdt
tdiLtRitu
1
Po podstawieniu:
Z – impedancja (zawada);
Część rzeczywistą Z nazywamy rezystancją (oporem czynnym - R), część urojoną – reaktancją (oporem biernym - X).
tjIti exp0
ZCj
LjRI
U
1
0
0
i wykonaniu działań, otrzymujemy:
74
OBWODY PRĄDU ZMIENNEGO
Wzór pozwalający obliczyć zawadę Z jest uogólnieniem prawa Ohma na sygnały zmienne. Umożliwia wyznaczanie napięć i prądów w dowolnych sieciach zawierających elementy RLC.
Obliczenia algebraiczne dla złożonych obwodów RLC są żmudne.
Metoda graficzna znacznie ułatwia rozwiązywanie.
Rozważania te są słuszne tylko dla sygnałów opisywanych funkcjami harmonicznymi.
75
OBWODY PRĄDU ZMIENNEGO
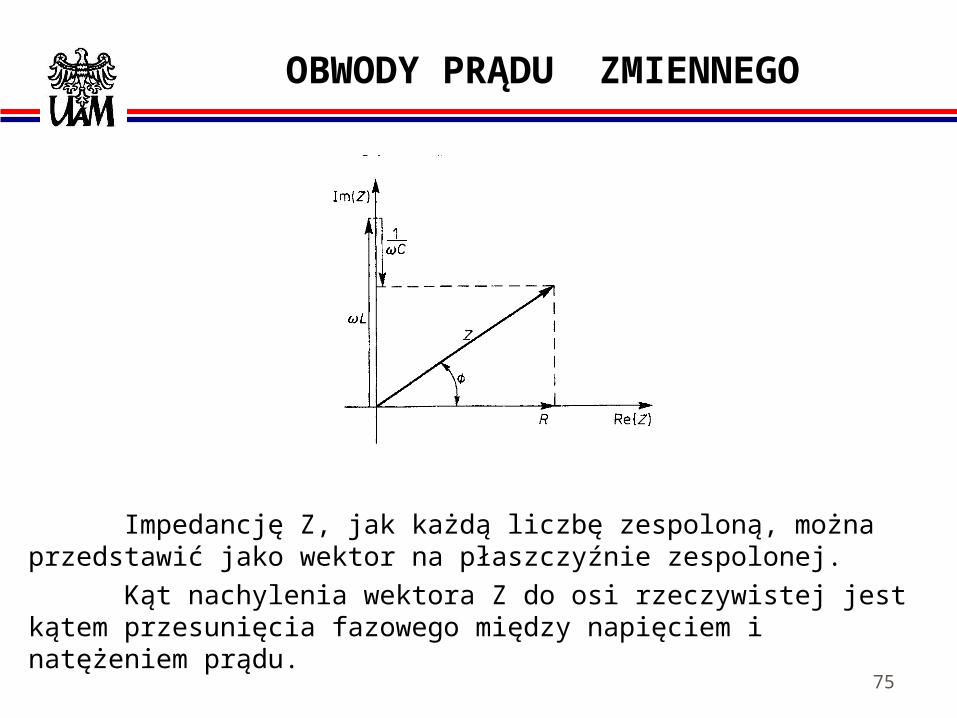
Impedancję Z, jak każdą liczbę zespoloną, można przedstawić jako wektor na płaszczyźnie zespolonej.
Kąt nachylenia wektora Z do osi rzeczywistej jest kątem przesunięcia fazowego między napięciem i natężeniem prądu.

76
SYGNAŁY
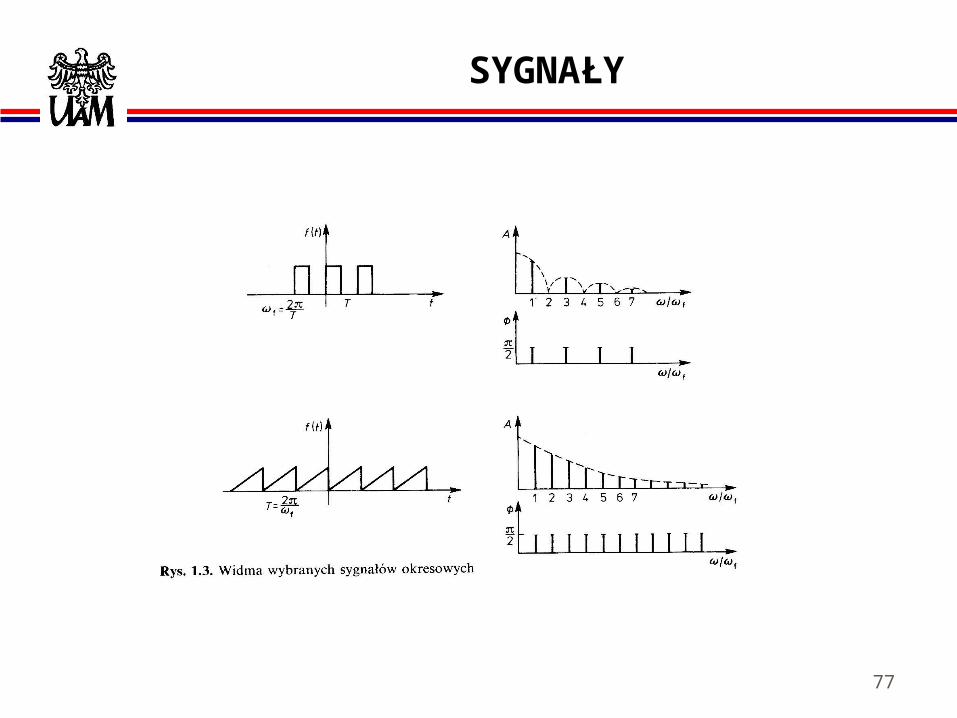
Każdy sygnał okresowy f(t) można przedstawić jako nieskończoną sumę funkcji harmonicznych o amplitudach An , częstościach kołowych nf (n jest liczbą naturalną) i przesunięciach fazowych n :
1
0 cosn
nfn tnAAtf
(zbiór trójek liczb An, nf,, n nazywany jest widmem sygnału f(t) a kolejne składowe n-tymi harmonicznymi).
TWIERDZENIE FOURIERA
77
SYGNAŁY
78
SYGNAŁY
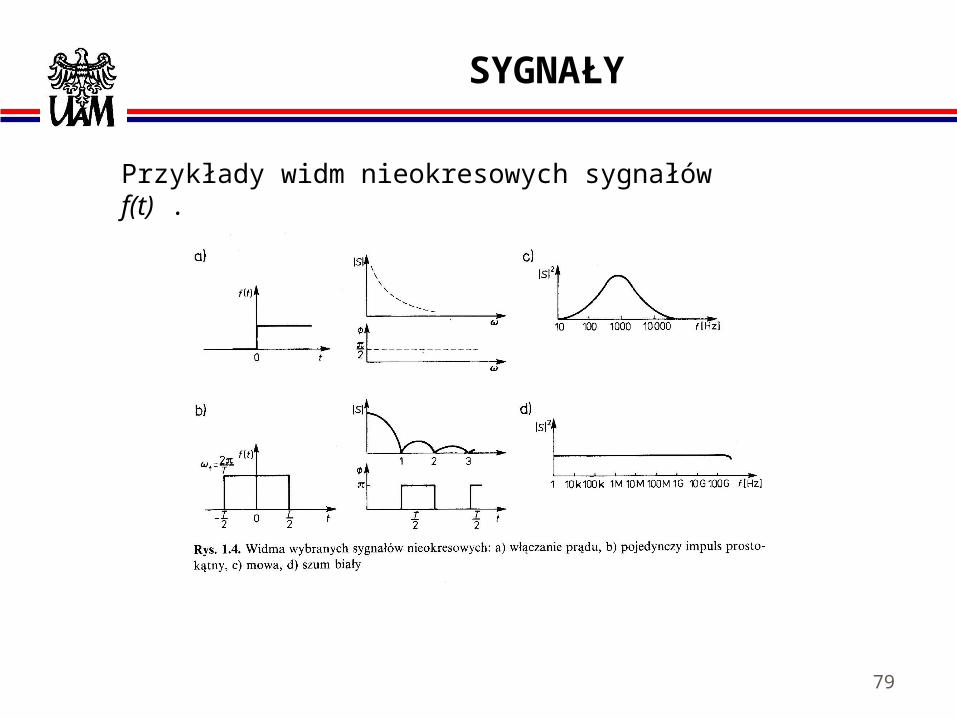
Jeżeli funkcja f(t) nie jest okresowa, to jej widmo S(ω) nie ma charakteru dyskretnego:
jtj eSdtetfS
79
SYGNAŁY
Przykłady widm nieokresowych sygnałów f(t) .
80
SYGNAŁY
81
SYGNAŁY
WNIOSEK:
możliwa jest analiza obwodu RLC pobudzanego dowolnym sygnałem.
Analizy pracy dowolnego obwodu pobudzanego sygnałem niesinusoidalnym można dokonać analizując jego zachowanie dla kilku składowych ( o największych amplitudach ) sygnału.
82
OBWODY ELEKTRYCZNE
źródło prądowe - przez źródło płynie prąd o natężeniu I bez względu na obciążenie.
W celu ułatwienia teoretycznego opisu sterowania przepływem energii, w elektronice stosuje się dwa modele idealnych źródeł:
źródło napięciowe - napięcie na jego zaciskach jest równe E i nie zależy od wartości pobieranego prądu.
83
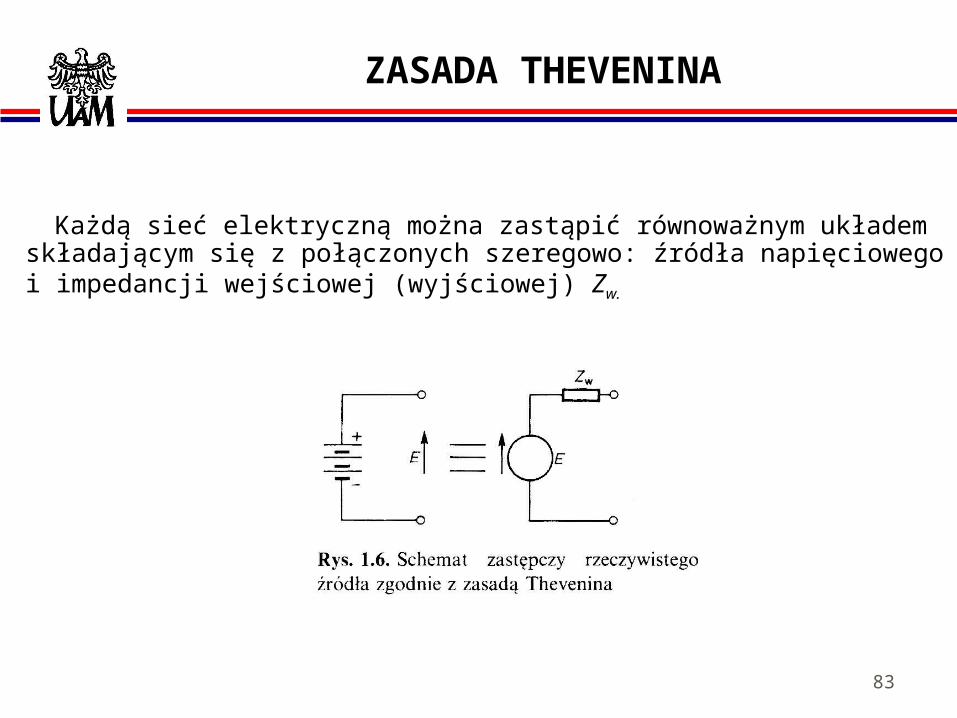
ZASADA THEVENINA
Każdą sieć elektryczną można zastąpić równoważnym układem składającym się z połączonych szeregowo: źródła napięciowego i impedancji wejściowej (wyjściowej) Zw.

84
ZASADA NORTONA
Każda sieć elektryczna może być przedstawiona w postaci równoważnego układu składającego się ze źródła prądowego i bocznikującej je impedancji (wejściowej lub wyjściowej).

85
ZASADY THEVENINA I NORTONA
umożliwiają analizowanie nawet najbardziej skomplikowanych układów elektronicznych za pomocą prostych układów zastępczych.
TWIERDZENIA THEVENINA I NORTONA
86
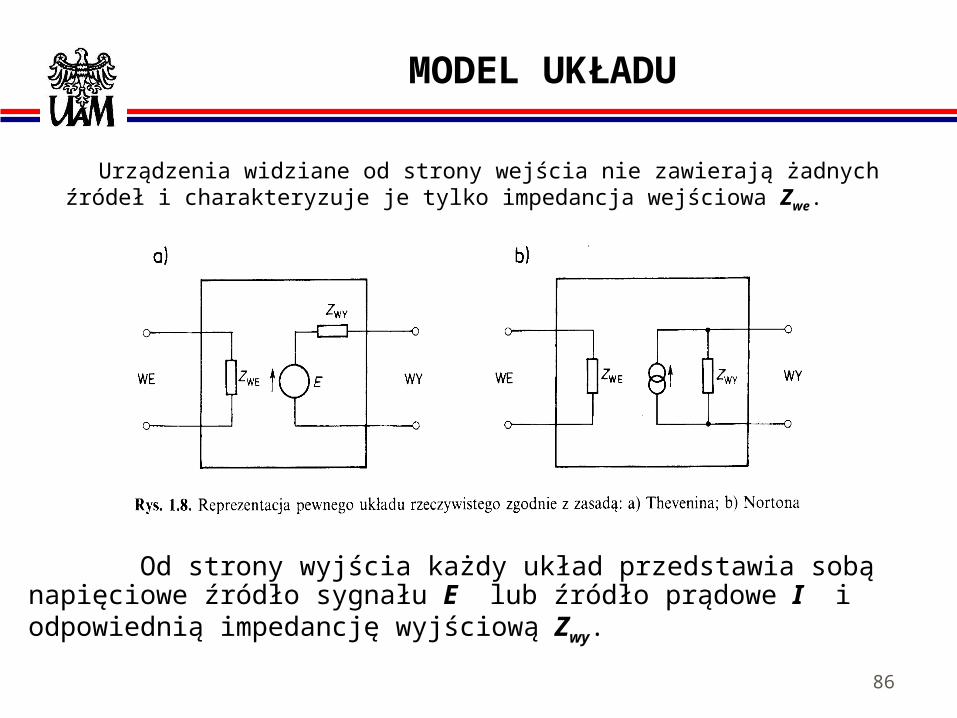
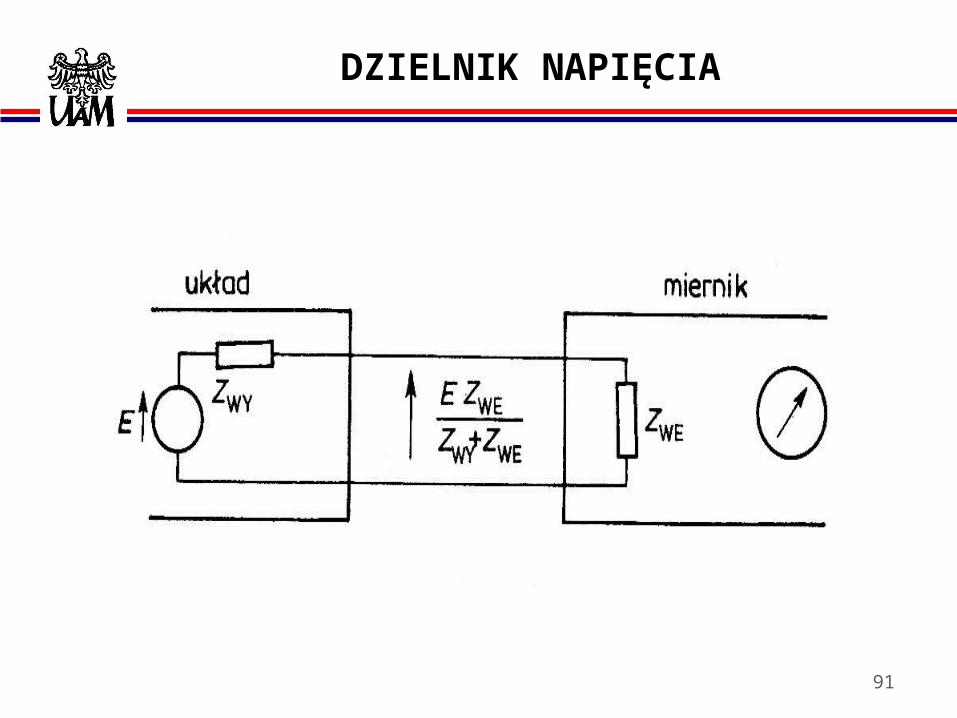
MODEL UKŁADU
Urządzenia widziane od strony wejścia nie zawierają żadnych źródeł i charakteryzuje je tylko impedancja wejściowa Zwe.
Od strony wyjścia każdy układ przedstawia sobą napięciowe źródło sygnału E lub źródło prądowe I i odpowiednią impedancję wyjściową Zwy.
87
ELEMENTY ELEKTRONICZNE
BIERNE - sposób sterowania przepływem energii elektrycznej zakodowany jest w ich konstrukcji.
np.: oporniki, kondensatory, cewki indukcyjne (transformatory), linie przesyłowe.
CZYNNE - umożliwiają sterowanie przepływem energii elektrycznej za pomocą sygnału elektrycznego lub innego rodzaju
np.: diody, tranzystory, tyrystory, lampy elektronowe, fototranzystory .
88
OBWODY ELEKTRONICZNE
89
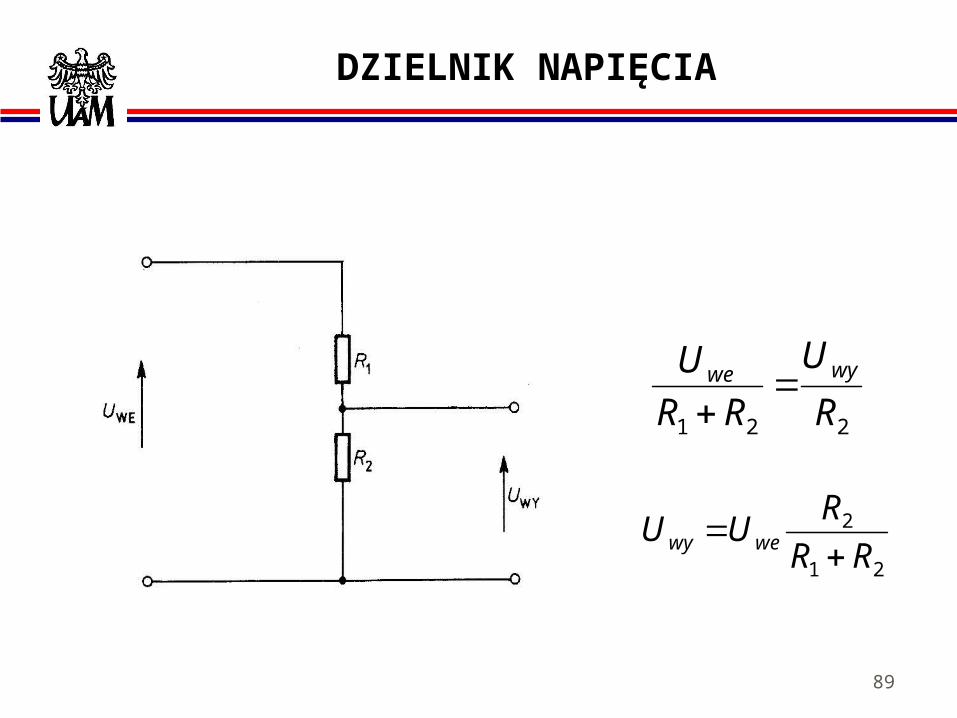
DZIELNIK NAPIĘCIA
21
2
RR
RUU wewy
221 R
U
RR
U wywe
90
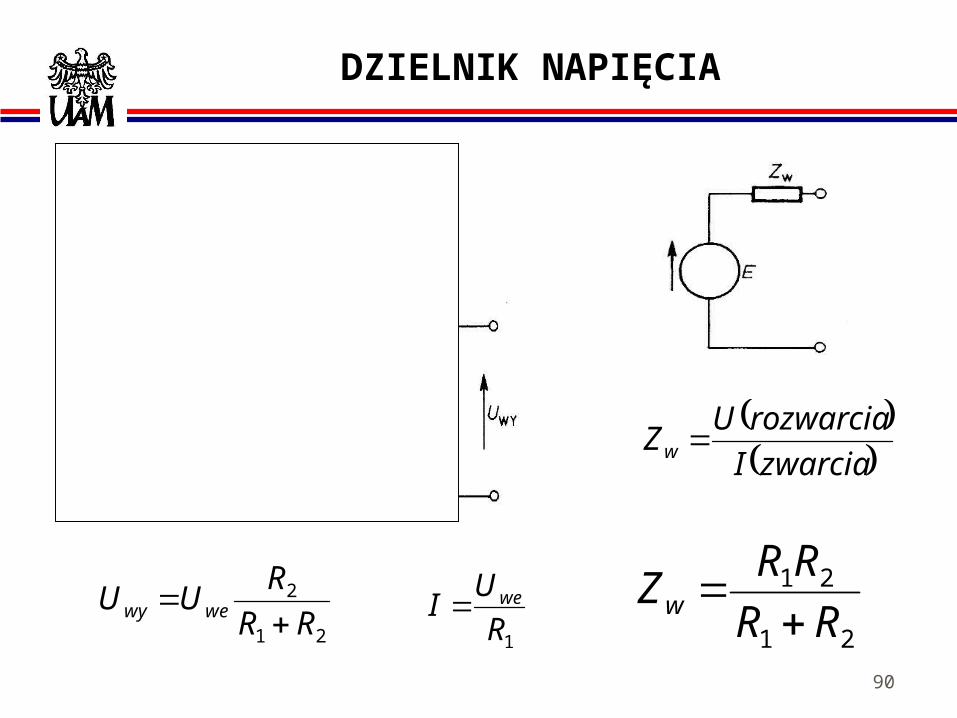
DZIELNIK NAPIĘCIA
21
2
RR
RUU wewy
zwarciaI
rozwarciaUZw
1R
UI we
21
21
RR
RRZw
91
DZIELNIK NAPIĘCIA
92
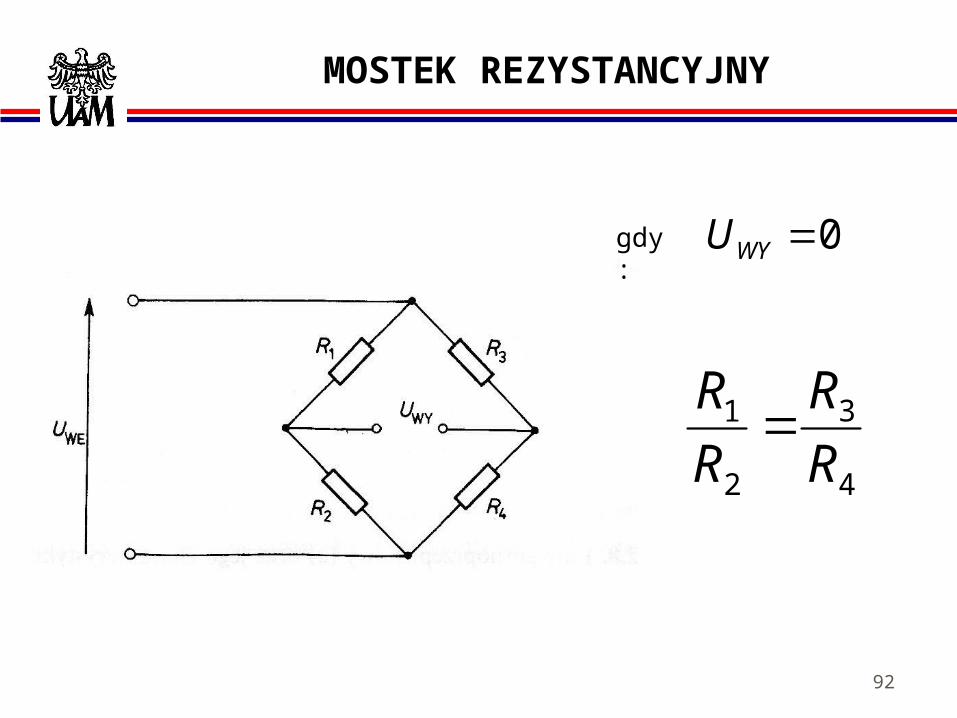
MOSTEK REZYSTANCYJNY
4
3
2
1
R
R
R
R
gdy:
0WYU

93
MOSTEK REZYSTANCYJNY
94
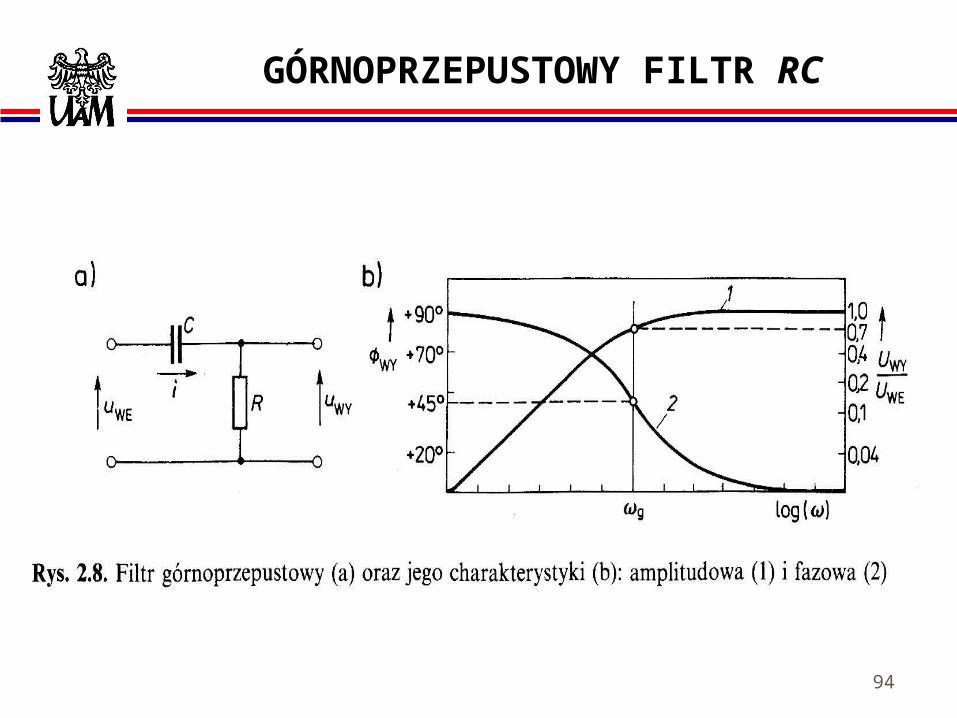
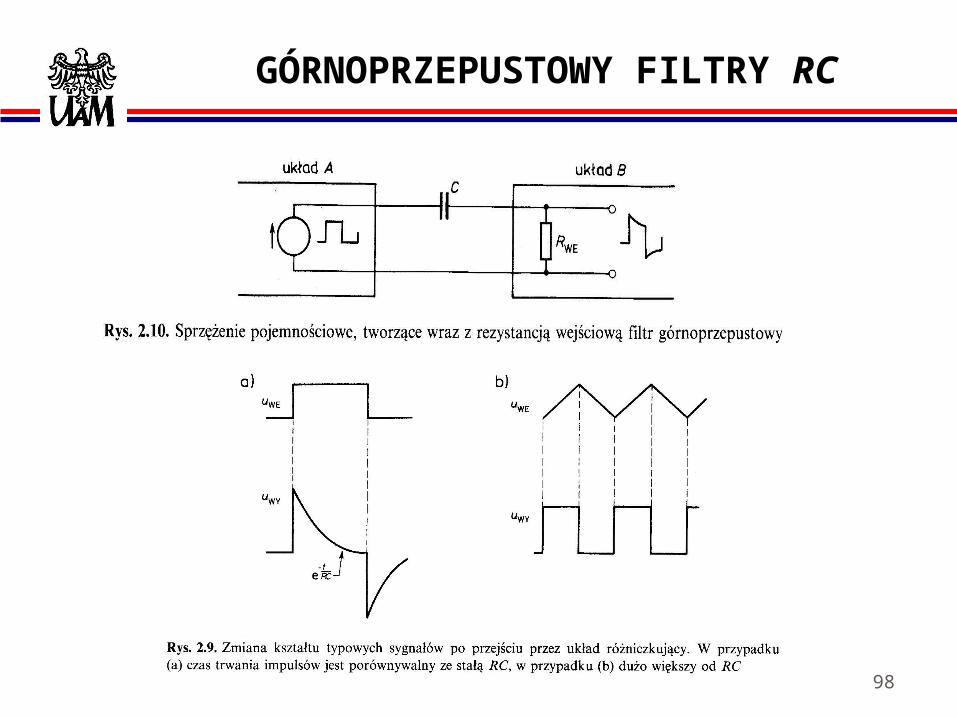
GÓRNOPRZEPUSTOWY FILTR RC

95
GÓRNOPRZEPUSTOWY FILTR RC
RCj
R
u
u
we
wy
/1
21 CR
CR
U
U
we
wy
71,02
1
we
wy
U
U1CRg
Stosunek amplitud tych napięć wynosi:
gdy:
Pulsację g nazywamy kołową częstością graniczną.RCg
1

96
GÓRNOPRZEPUSTOWY FILTR RC
Przyjmuje się, że pasmo przenoszenia tego układu rozciąga się od g do nieskończoności.
Często filtry RC charakteryzuje się podając tzw. stałą czasową:
RCg
1
Dla g przesunięcie fazowe pomiędzy sygnałem wyjściowym a wejściowym wynosi /4 (45).
97
GÓRNOPRZEPUSTOWY FILTR RC
Zastosowania:
- kształtowanie charakterystyk częstotliwościowych obwodów,
- przesuwanie fazy sygnałów,- modyfikowanie kształtów przebiegów elektrycznych,- w urządzeniach wielostopniowych jako układy
sprzężenia pojemnościowego.
98
GÓRNOPRZEPUSTOWY FILTRY RC
99
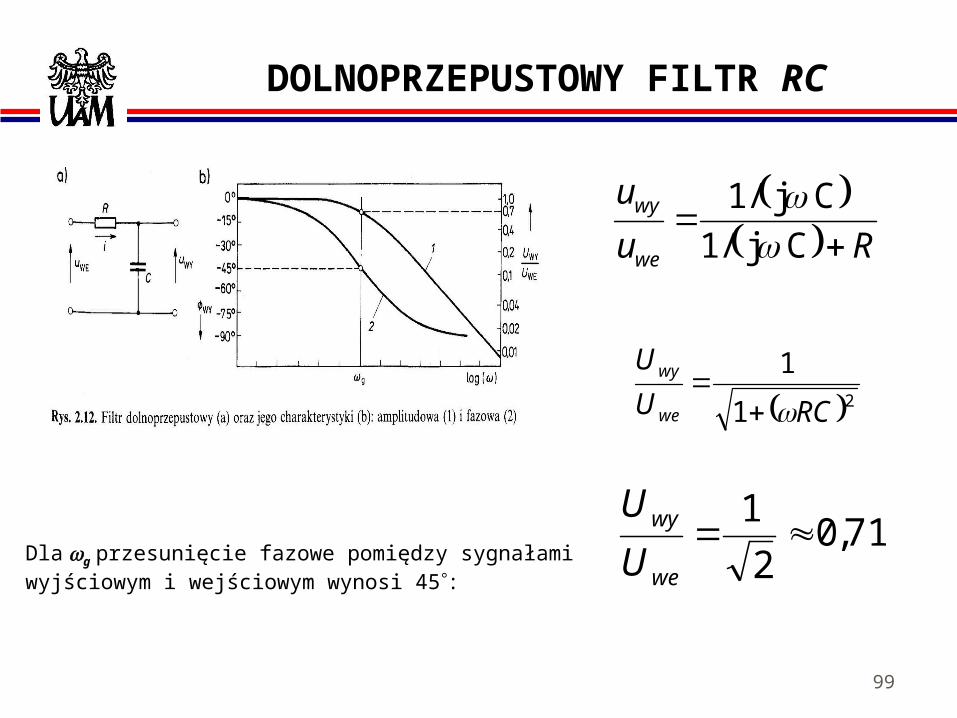
DOLNOPRZEPUSTOWY FILTR RC
Ru
u
we
wy
Cj/1
Cj/1
21
1
RCU
U
we
wy
Dla g przesunięcie fazowe pomiędzy sygnałami wyjściowym i wejściowym wynosi 45:
71,02
1
we
wy
U
U
100
DOLNOPRZEPUSTOWY FILTR RC
Zastosowania:
- w układach kształtowania charakterystyk częstotliwościowych,
- jako przesuwnik fazowy,- w układach formowania przebiegów elektrycznych,- do uśredniania w czasie przebiegów elektrycznych .

101
SZEREGOWY OBWÓD REZONANSOWY
Gdy:
CjLjR
tuti
1
22
00
1
CLR
UI
R
UIR
0LC
10
102
SZEREGOWY OBWÓD REZONANSOWY
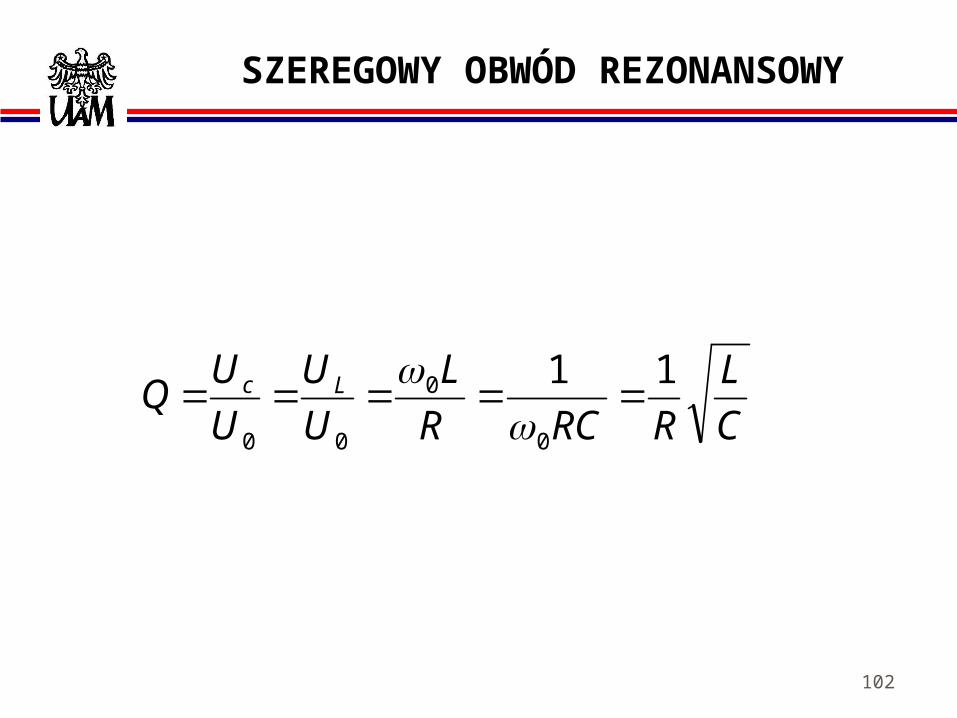
C
L
RRCR
L
U
U
U
UQ Lc 11
0
0
00
103
SZEREGOWY OBWÓD REZONANSOWY
P
W
TRI
LI
R
LQ m
R
R 2
21
21
2
02
0
104
SZEREGOWY OBWÓD REZONANSOWY
Dobroć Q układu rezonansowego wyraża
stosunek energii zmagazynowanej:
do mocy traconej
20
2 LIW R
m
2
2RIP R
0
2
Tw ciągu jednego okresu drgań.
105
SZEREGOWY OBWÓD REZONANSOWY
106
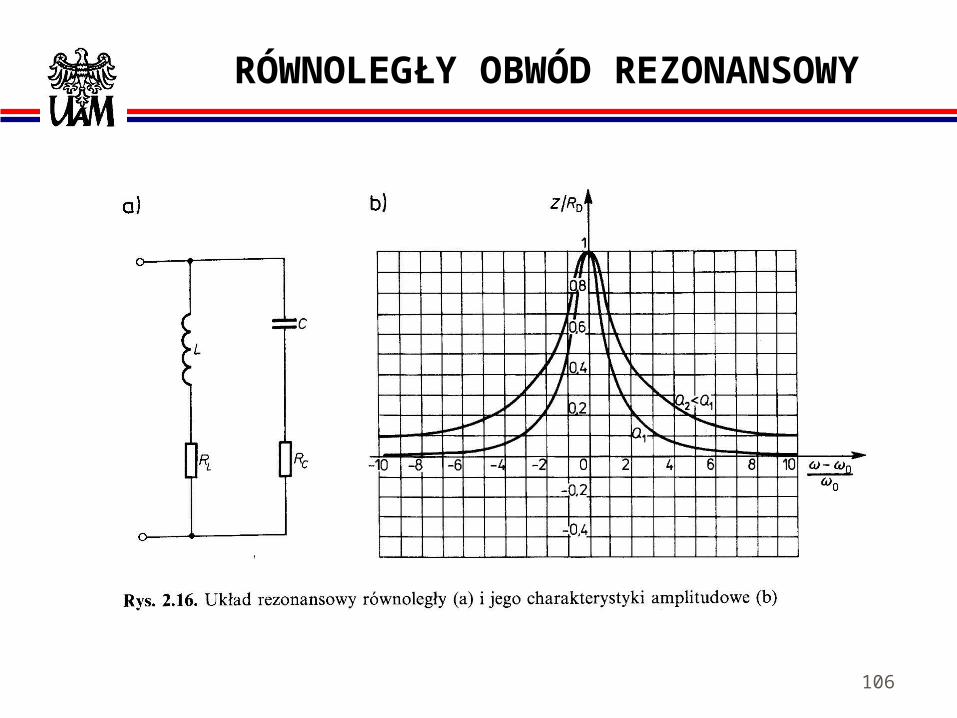
RÓWNOLEGŁY OBWÓD REZONANSOWY
107
RÓWNOLEGŁY OBWÓD REZONANSOWY
gdy: RC 0 oraz RL<<L
2
2
0D
L
CRLLC
CRL
220
2
20
LR
LCRRI
L
CLR
LC
10
DL RL
CR

108
RÓWNOLEGŁY OBWÓD REZONANSOWY
Dobroć obwodu:
R
LQ 00
109
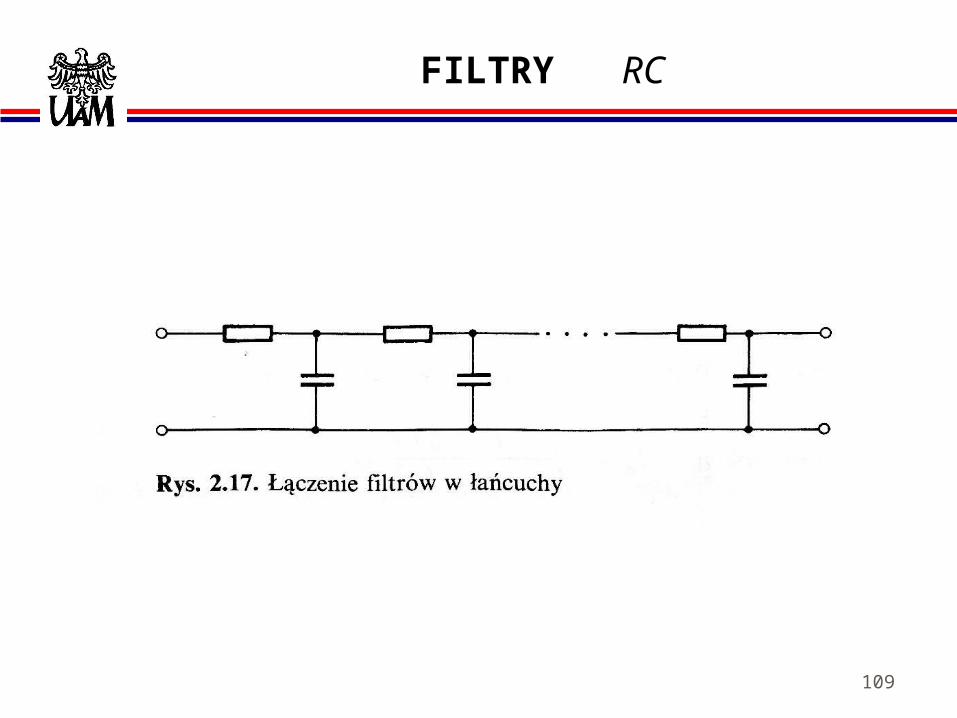
FILTRY RC

110
FILTRY RC

111
FILTRY RC
112
OBWODY ELEKTRYCZNE
Układ nazywamy liniowym, jeżeli dla każdej częstości kołowej doprowadzony do wejścia sygnał opisywany funkcją harmoniczną:
tAtfWE cos
na wyjściu wytworzy sygnał opisywany również funkcją harmoniczną:
Obwód liniowy.
tAktfWY cos
gdzie: k() jest transmitancją układu - funkcją zespoloną niezależną od czasu.
Moduł funkcji k() nazywamy CHARAKTERYSTYKĄ CZĘSTOTLIWOŚCIOWĄ, a zależność kąta fazowego od częstotliwości – CHARAKTERYSTYKĄ FAZOWĄ.
113
WIDMO SYGNAŁU
UKŁADY NIELINIOWE.
Sygnał wejściowy:
Sygnał wyjściowy:
tAswe cos
tnAksn
nwy cos0
nn
nnwe
nnwy tADsDs
cos00
114
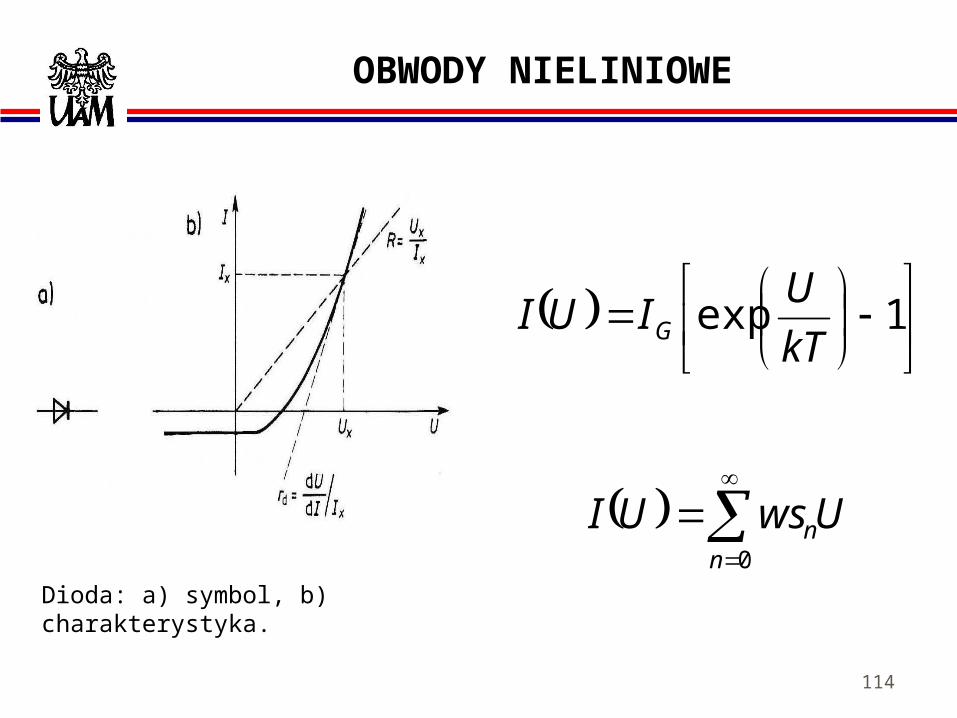
OBWODY NIELINIOWE
Dioda: a) symbol, b) charakterystyka.
1exp
kT
UIUI G
UwsUIn
n
0
115
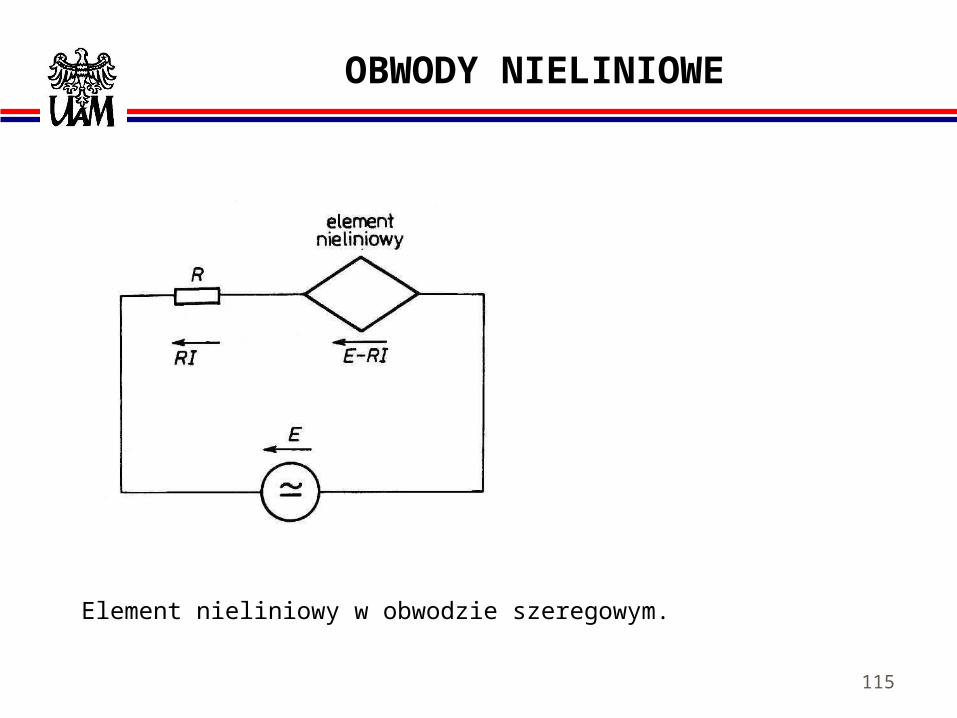
OBWODY NIELINIOWE
Element nieliniowy w obwodzie szeregowym.

116
OBWODY NIELINIOWE
Graficzne rozwiązanie układu.
117
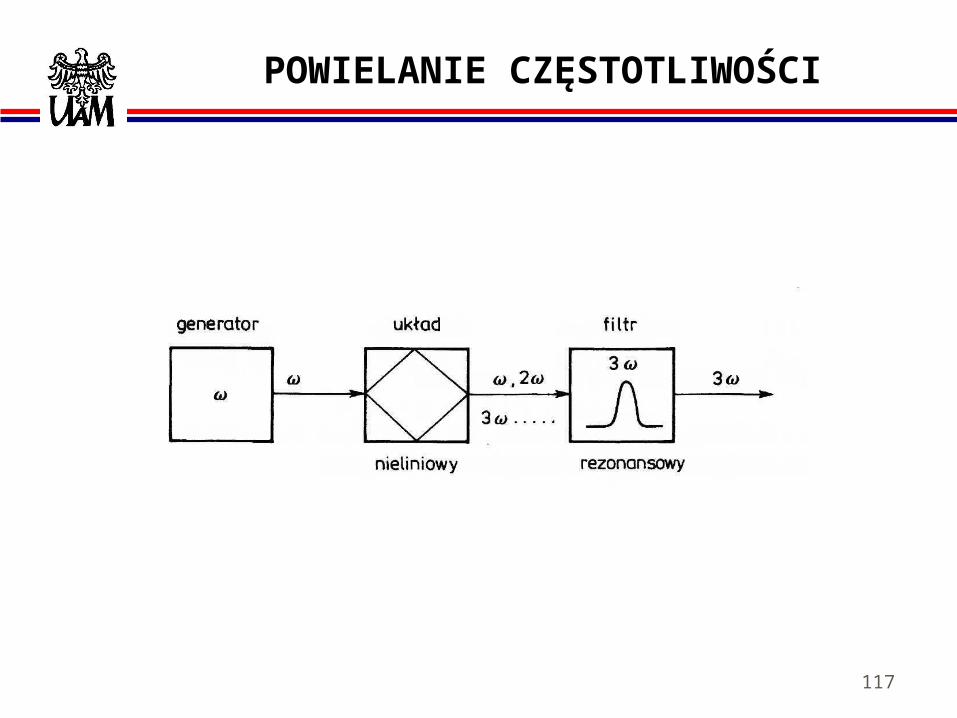
POWIELANIE CZĘSTOTLIWOŚCI
118
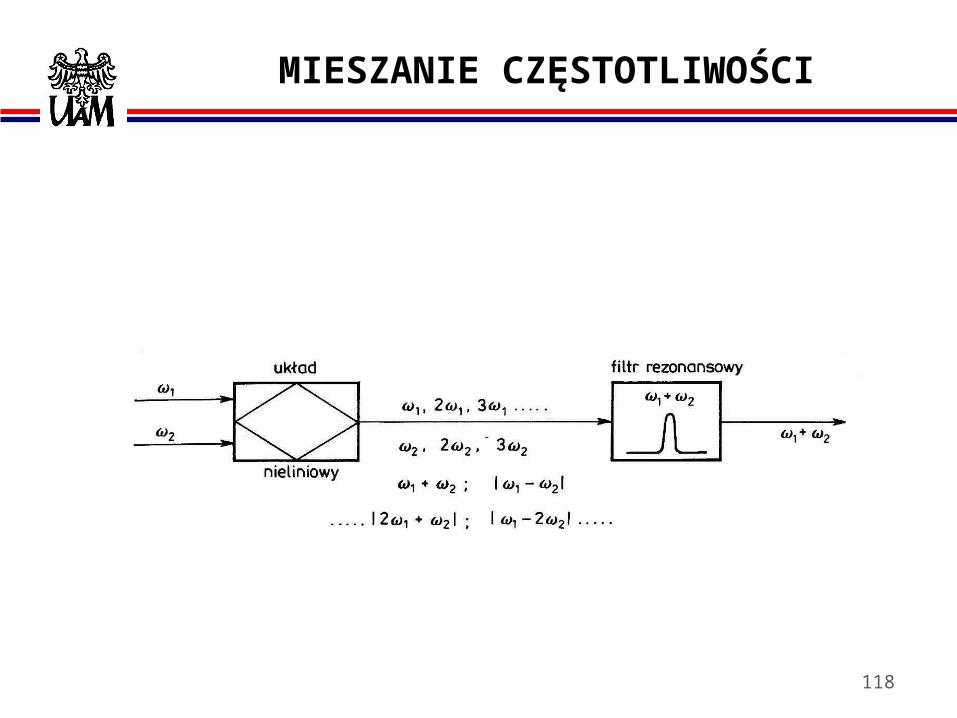
MIESZANIE CZĘSTOTLIWOŚCI
119
MODULACJA AMPLITUDY
ttmUtUtU coscos2
1sin 00

120
MODULACJA AMPLITUDY
Kształt fali zmodulowanej amplitudowo i jej widmo.
121
MODULACJA AMPLITUDY
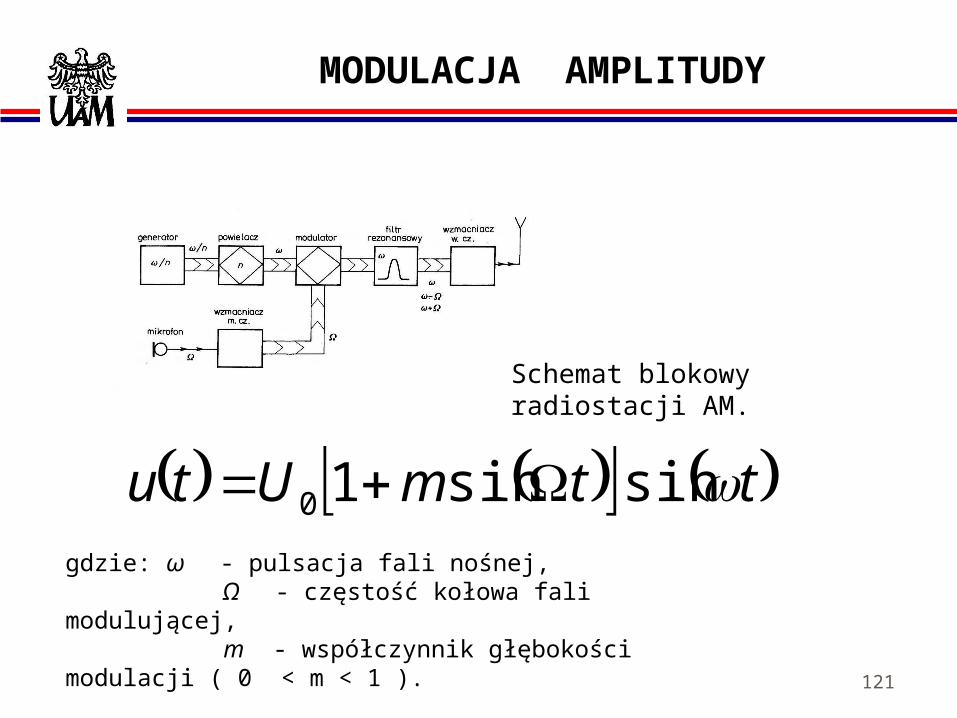
gdzie: ω - pulsacja fali nośnej, Ω - częstość kołowa fali modulującej, m - współczynnik głębokości modulacji ( 0 < m < 1 ).
Schemat blokowy radiostacji AM.
ttmUtu sinsin10

122
DETEKCJA AM.
Schemat blokowy odbiornika detektorowego.
123
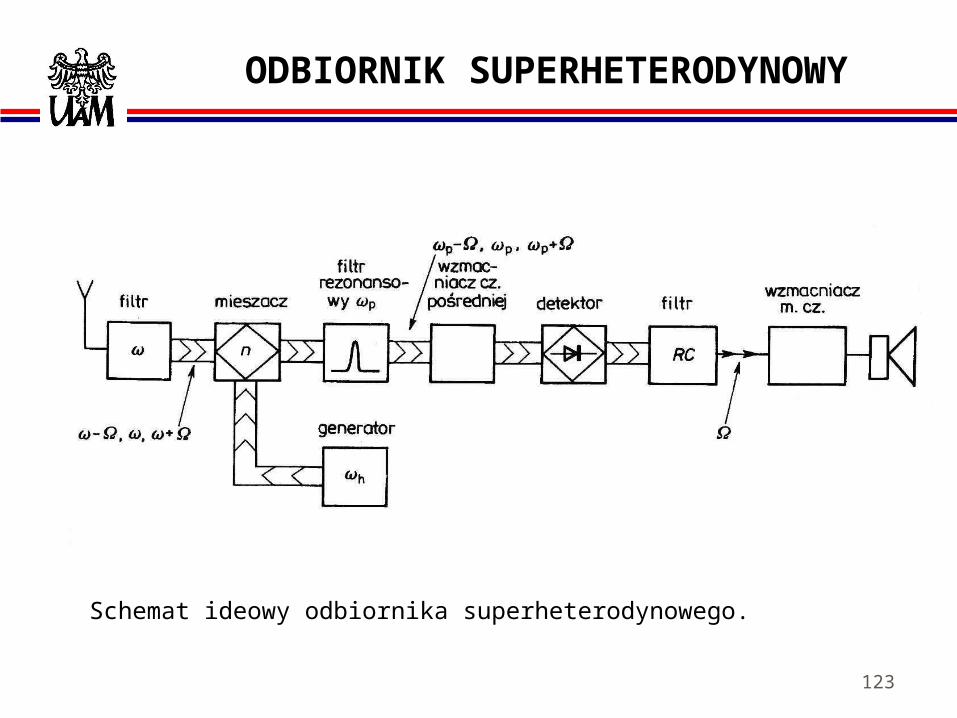
ODBIORNIK SUPERHETERODYNOWY
Schemat ideowy odbiornika superheterodynowego.