CAN
9
CAN-bus czyli wymiana informacji i diagnoza po szynie danych CAN-bus czyli wymiana informacji po szynie danych w Mercedesie klasy "S" Magistrala CAN jest tak skonstruowana, że w jednej chwili nadawać może tylko jedno urządzenie. Jeśli zdarzy się sytuacja, że wiele nadajników chce wysyłać dane, wszystkie milkną i jako pierwsze rozpoczynają transmisję te urządzenia, które mają najwyższy priorytet. W Mercedesie klasy S przez samochód przebiegają dwie, a w CL nawet trzy sprzężone ze sobą szyny danych. Dane ważne dla bezpieczeństwa jazdy, na przykład z układów sterowania napędem, przepływają szyną o większej przepustowości niż sygnały dotyczące na przykład klimatyzacji. W Mercedesie klasy S magistrala przenosi (w zależności od wyposażenia auta) do 650 sygnałów sterujących około 150 funkcjami 50 urządzeń elektronicznych. Informacje te mogą być wykorzystywane przez wiele układów do najróżniejszych zadań: np. przez klimatyzację do sterowania dmuchawą, radio w celu dopasowania siły głosu, deskę rozdzielczą do pokazywania prędkości czy przez komputer pokładowy i system nawigacji do znalezienia optymalnej trasy. Auta Mercedesa klasy S i CL, obok tradycyjnych kabli miedzianych, zawierają światłowody. Przez szynę o nazwie D2B może przepływać ponad 5,6 miliona bitów na sekundę, czyli około 60 razy więcej niż tradycyjną CAN. Dzięki temu, że magistrala D2B może przenosić także sygnały audio, system nagłaśniający, urządzenie głośno mówiące oraz system nawigacji mogą korzystać z tych samych głośników. Mimo iż ciągle przybywa w samochodach nowych układów elektronicznych, dzięki cyfrowemu układowi CAN zmniejszyło się okablowanie samochodu. W poprzedniku klasy S było 3,2 km kabli ważących 56 kg, dziś znajduje się tam tylko 2,2 km przewodów o masie 39 kg. W Volvo już od roku 1999 komunikacja wszystkich urządzeń odbywa się w technice CAN -bus. Chociaż przełącznik świateł steruje siedmioma różnymi funkcjami, dochodzą do niego tylko trzy przewody: plus, masa i sygnał danych. Takim kablem połączone są wszystkie urządzenia wykonawcze. Dzięki technice CAN-bus jednym przewodem mogą być przenoszone jednocześnie w obu kierunkach dwa sygnały lub więcej. Przepływają dane - np. sterujące silnikiem lub skrzynią biegów - z szybkością 250 kbit/s oraz do modułów mających mniej istotne zadania, jak sterowanie klimatyzacją lub światłem wewnątrz samochodu - te informacje transmitowane są z prędkością 125 kbit/s.Jeśli na przykład włączone mają być tylne światła przeciwmgielne, przełącznik świateł przekazuje przez szynę danych odpowiedni cyfrowy sygnał do wszystkich modułów. Układy, do których nie jest on adresowany, ignorują te informacje. Są one odbierane prze REM (Rear Electronic Module) umieszczony w bagażniku. Układ pobudza przekaźnik, który z kolei włącza lampy przeciwmgielne. To jednak nie koniec - jednocześnie REM kontroluje ich działanie. Jeśli wszystko jest w porządku, odpowiednia informacja przepływa przez szynę danych i na tablicy rozdzielczej zapala się lampka OK. Dzięki technice CAN-bus oraz elastycznie działającym modułom, sygnał wysłany do układu REM może naprzykład spowodować włączenie tylnego światła przeciwmgielnego, gdy przepali się żarówka znajdująca się w świetle hamowania.Komunikacja wszystkich pokładowych urządzeń sterujących odbywa się poprzez CAN (Controller Area Network). Nazwa ta obejmuje zarówno magistralę, jak i protokół określający sposób przesyłania danych. CAN działa na zasadzie rozsiewczej (broadcasting), co oznacza, że informacje są wysyłane przez jedno urządzenie, a pozostałe mogą je odbierać. Ponieważ wszystkie przesyłane pakiety danych zawierają identyfikator adresata, każdy z odbiorników "wie", czy są one przeznaczone dla niego.
description
Wszystko na Temat Magistrali CAN
Transcript of CAN
-
CAN-bus czyli wymiana informacji i diagnoza po szynie danych CAN-bus czyli wymiana informacji po szynie danych w Mercedesie klasy "S" Magistrala CAN jest tak skonstruowana, e w jednej chwili nadawa moe tylko jedno urzdzenie. Jeli zdarzy si sytuacja, e wiele nadajnikw chce wysya dane, wszystkie milkn i jako pierwsze rozpoczynaj transmisj te urzdzenia, ktre maj najwyszy priorytet. W Mercedesie klasy S przez samochd przebiegaj dwie, a w CL nawet trzy sprzone ze sob szyny danych. Dane wane dla bezpieczestwa jazdy, na przykad z ukadw sterowania napdem, przepywaj szyn o wikszej przepustowoci ni sygnay dotyczce na przykad klimatyzacji. W Mercedesie klasy S magistrala przenosi (w zalenoci od wyposaenia auta) do 650 sygnaw sterujcych okoo 150 funkcjami 50 urzdze elektronicznych. Informacje te mog by wykorzystywane przez wiele ukadw do najrniejszych zada: np. przez klimatyzacj do sterowania dmuchaw, radio w celu dopasowania siy gosu, desk rozdzielcz do pokazywania prdkoci czy przez komputer pokadowy i system nawigacji do znalezienia optymalnej trasy. Auta Mercedesa klasy S i CL, obok tradycyjnych kabli miedzianych, zawieraj wiatowody. Przez szyn o nazwie D2B moe przepywa ponad 5,6 miliona bitw na sekund, czyli okoo 60 razy wicej ni tradycyjn CAN. Dziki temu, e magistrala D2B moe przenosi take sygnay audio, system naganiajcy, urzdzenie gono mwice oraz system nawigacji mog korzysta z tych samych gonikw. Mimo i cigle przybywa w samochodach nowych ukadw elektronicznych, dziki cyfrowemu ukadowi CAN zmniejszyo si okablowanie samochodu. W poprzedniku klasy S byo 3,2 km kabli wacych 56 kg, dzi znajduje si tam tylko 2,2 km przewodw o masie 39 kg. W Volvo ju od roku 1999 komunikacja wszystkich urzdze odbywa si w technice CAN -bus. Chocia przecznik wiate steruje siedmioma rnymi funkcjami, dochodz do niego tylko trzy przewody: plus, masa i sygna danych. Takim kablem poczone s wszystkie urzdzenia wykonawcze. Dziki technice CAN-bus jednym przewodem mog by przenoszone jednoczenie w obu kierunkach dwa sygnay lub wicej. Przepywaj dane - np. sterujce silnikiem lub skrzyni biegw - z szybkoci 250 kbit/s oraz do moduw majcych mniej istotne zadania, jak sterowanie klimatyzacj lub wiatem wewntrz samochodu - te informacje transmitowane s z prdkoci 125 kbit/s.Jeli na przykad wczone maj by tylne wiata przeciwmgielne, przecznik wiate przekazuje przez szyn danych odpowiedni cyfrowy sygna do wszystkich moduw. Ukady, do ktrych nie jest on adresowany, ignoruj te informacje. S one odbierane prze REM (Rear Electronic Module) umieszczony w baganiku. Ukad pobudza przekanik, ktry z kolei wcza lampy przeciwmgielne. To jednak nie koniec - jednoczenie REM kontroluje ich dziaanie. Jeli wszystko jest w porzdku, odpowiednia informacja przepywa przez szyn danych i na tablicy rozdzielczej zapala si lampka OK. Dziki technice CAN-bus oraz elastycznie dziaajcym moduom, sygna wysany do ukadu REM moe naprzykad spowodowa wczenie tylnego wiata przeciwmgielnego, gdy przepali si arwka znajdujca si w wietle hamowania.Komunikacja wszystkich pokadowych urzdze sterujcych odbywa si poprzez CAN (Controller Area Network). Nazwa ta obejmuje zarwno magistral, jak i protok okrelajcy sposb przesyania danych. CAN dziaa na zasadzie rozsiewczej (broadcasting), co oznacza, e informacje s wysyane przez jedno urzdzenie, a pozostae mog je odbiera. Poniewa wszystkie przesyane pakiety danych zawieraj identyfikator adresata, kady z odbiornikw "wie", czy s one przeznaczone dla niego.
-
Oglne informacje Podstawowe wasnoci magistrali CAN to: - Dua odporno na zewntrzne zakcenia elektromagnetyczne, dziki zastosowaniu rnicowej techniki transmisji bitw. Ponadto kada ramka CAN opatrzona jest sum kontroln CRC-15. Wedug matematycznych oblicze jeden przekamany bit moe zosta nie wykryty raz na 1000 lat cigej pracy magistrali (prawdopodobiestwo niewykrycia wynosi 10^-11). - Transmisja na magistrali odbywa si metod broadcastow w konfiguracji multi-master. - Dostp do medium transmisyjnego realizowany jest poprzez mechanizm CSMA/CA (Carrier Sense Multiple Access with Collision Avoidance). Zapewnia on transmisj wiadomoci z uwzgldnieniem jej priorytetu. W odrnieniu od magistrali Ethernetowej, wspomniany mechanizm zapobiega utracie informacji w przypadku kolizji na magistrali. - Dane na magistrali mog by transmitowane z prdkoci do 1Mbps na odlego max. 40 metrw. Wraz ze wzrostem odlegoci prdko maleje. Naley pamita, e rzeczywista efektywno (prdko) przesyanych danych po uwzgldnieniu nagwka i danych nadmiarowych wynosi ~50% (take przy identyfikatorze 29-bitowym).
Szybko transmisji kbps
Dugo magistrali m
1000 40
500 100
200 200
100 660
50 10000
5 100000
- Standard CAN definiuje kilka typw ramek. Ramka danych moe zawiera do 8 bajtw danych. Mechanizm wykrywania i obsugi bdw korzysta z ramek bdw (error frames). Istnieje moliwo uycia ramek zdalnych (RTR Remote Transmission Request frames), oraz ramek przeadowania (overload frames). - Elastyczno systemu doczenie kolejnych wzw bez koniecznoci zmian hardwerowych i softwerowych. - CAN jest to magistral asynchroniczn i szeregow. Warstwa fizyczna Standard CAN jest zdefiniowany w dwch warstwach modelu odniesienia, co daje pen elastyczno w stosunku do pozostaych warstw. Jako medium transmisyjne podstaw jest medium miedziane (skrtka ekranowana lub nieekranowana). Rzadkie s przypadki stosowania wiatowodu, natomiast prowadzone s obecnie badania nad uyciem fal radiowych. Warstwa fizyczna definiuje:
-
- poziomy sygnaw wystpujcych na magistrali. Stan dominujcy, odzwierciedla niski poziom logiczny, natomiast stan recesywny, odzwierciedla wysoki poziom logiczny. - impedancj falow magistrali. zalenoci bitowe, z ktrych wynika prdko transmisji. - kodowanie za pomoc metody NRZ (Non-return-to-Zero). - synchronizacj na magistrali, ktr zapewnia metoda bit stuffing, polegajca na dostawieniu bitu stanu przeciwnego po serii 5 bitw tego samego stanu. Istnieje kilka norm definiujcych parametry magistrali przy rnych prdkociach transmisji. Standardy te rni si poziomami napi a take wartoci impedancji terminujcej na kocu magistrali. Wynika std maksymalna liczba wzw jak mona podpi do magistrali Najbardziej znane normy to: 1.ISO11898 dla magistral o szybkiej transmisji danych (do 1Mb/s). - szybko transmisji 125kpbs 1Mbps - od 2 do 30 wzw na sie - maksymalna dugo magistrali to 40 m - terminatory 120ohm jako elementy dopasowania impedancyjnego - przewd dwuyowy ekranowany - zasilanie 5V - zakres napi sygnau od -2 do +7V - minimalny prd wyjciowy nadajnika wikszy od 25mA 2.ISO11519 dla magistral o wolnej transmisji danych (do 125kb/s). - szybko transmisji do 125kbps - od 2 do 20 wzw w sieci - szybko przesyanych danych zaley od obcienia magistrali przez pojemno wprowadzan przez wzy - pojedyczy terminator na kocu linii - prd wyjciowy wikszy ni 1mA - napicie zasilania 5V - zakres napi od -2V do + 7V Czas trwania kadego z bitw jest cile zdefiniowany przez cztery segmenty. Koncepcj t przedstawia poniszy rysunek:
-
Poszczeglne elementy to: tq time quantum jest to najmniejszy niepodzielny odcinek czasu sucy do obliczenia zalenoci pozostaych segmentw (segmenty skadaj si z cakowitej wielokrotnoci liczby tq). Warto tq zaley od czstotliwoci taktowania danego wza. Segment synchronizacji jest to segment znajdujcy si w pierwszej fazie trwania bitu. Suy do synchronizacji wzw znajdujcych si w sieci. W chwili trwania segmentu synchronizacji nastpuje zmiana wartoci bitu. Czas trwania tego fragmentu zawsze wynosi 1 tq. Segment propagacji segment ten jest uywany do kompensacji opnie przez przewody transmisyjne oraz kontrolery obsugujce. Segment ten jest programowalny od 1 do 8 tq. Segment pierwszego bufora fazy jest wykorzystywany do kompensacji bdw fazowych zboczy sygnaw. Warto tego pola moe by ustawiana w zakresie od 1 do tq. Warto tego pola moe by wyduona w momencie resynchronizacji. Po tym fragmencie bitu nastpuje prbkowanie wartoci bitu (jednokrotne lub trzykrotne). Segment drugiego bufora fazy jest rwnie wykorzystywany do kompensacji bdw fazowych zboczy sygnaw. Warto tego pola rwnie moe by ustawiana w zakresie od 1 do tq. W trakcie resynchronizacji dugo tego pola moe by automatycznie skrcona. Przed tym segmentem bitu nastpuje prbkowanie wartoci bitu (jednokrotne lub trzykrotne). Chwila prbkowania magistrali jest parametrem wpywajcym na wraliwo wza. Zmniejszenie wpywu zmian czstotliwoci taktujcej uzyskujemy poprzez
-
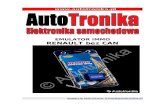
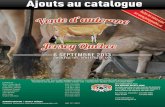
wyprzedzajce prbkowanie, natomiast opnione prbkowanie obnia wraliwo wzw na opnienia wynikajce z toru transmisyjnego. Warstwa cza danych Warstwa cza danych definiuje struktur ramki, oraz mechanizm dostpu do medium. W przypadku identyfikatora 11-bitowego standardu CAN2.0B struktura ramki przedstawia si nastpujco:
Poszczeglne elementy to : - SOF (Start of Frame) bit dominujcy bit oznaczajcy pocztek ramki - ID (Identificator) pole to reprezentuje 11-bitowy identyfikator ramki - RTR bit Jeeli jest w stanie recesywnym, to mamy do czynienia z ramk zdaln (brak pola danych), w przeciwnym wypadku mamy do czynienia z ze zwyk ramk danych - IDE (Identificator Extension) Bit ktry pozwala rozrni czy mamy do czynienia identyfikatorem podstawowym ramki, czy tez z rozszerzonym. Dla identyfikatora 11-bitowego, bit ten znajduje si w stanie dominujcym. - r0 Bit zarezerwowany. Jest akceptowalny w dowolnym stanie recesywnym lub dominujcym. - DLC (Data Length Code) 3 bitowe pole informujce jaka ilo bajtw jest przesyana w aktualnej ramce - Data field Pole danych. Moe zawiera od 0 do 8 bajtw danych. - CRC (Cyclic Redundancy Check) field 15-bitowe pole sumy kontrolnej. Suma kontrolna liczona jest na podstawie wszystkich bitw poprzedzajcych pole sumy
-
kontrolnej. Pole sumy kontrolnej koczy ogranicznik (CRC-D - delimiter), znajdujcy si zawsze w stanie recesywnym. Warto zapamita fakt, e suma kontrolna liczona jest na podstawie strumienia bez bitw dostawionych. - ACK (Acknowledge) 2-bitowe pole potwierdzenia (ACK slot, ACK-D - delimiter). Suy do potwierdzenia przez wze odbierajcy poprawnoci transmisji. - EOF (End of Frame) 7-bitowe pole koca ramki. Jest to cig bitw znajdujcych si w stanie recesywnym. - INT (Interval) 3-bitowa przerwa midzyramkowa, zawsze znajdujc si w stanie recesywnym Po kadej przesanej ramce musi wystpi co najmniej 3-bitowa przerwa midzyramkowa. W przypadku ramki z identyfikatorem 29-bitowym (poniej), bit IDE ustawiony jest w stan recesywny, co sygnalizuje, e kolejne 18-bitw stanowi skadow cz identyfikatora 29-bitowego. Wystpuje tutaj dodatkowe pole SSR (Substitute Remote Request bit).
Jak atwo policzy, uywajc identyfikatora 11-bitowego moemy zaadresowa 2048 wzw. Poniewa specyfikacja mwi, e siedem najstarszych bitw nie moe znajdowa si jednoczenie w stanie recesywnym , dlatego te efektywna liczba identyfikatorw moliwych do uycia wynosi 2032 (20482^4). Dla identyfikatora 29-bitowego liczba ta ronie do okoo 536 milionw. Tak dua liczba wzw z kolei nie jest moliwa do podczenia z przyczyn fizycznych, gdy kady dodatkowy wze wprowadza pojemno i dodatkowo obcia magistral powodujc znieksztacenia przebiegw na niej wystpujcych. Dlatego praktyczna liczba wzw nie powinna przekracza 32 urzdze (przy maksymalnej prdkoci).
-
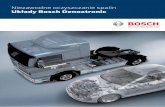
Jak ju wczeniej wspomniano dostp do medium jest realizowany poprzez proces arbitrau bitowego. Kady wze nasuchuje tego co dzieje si na magistrali w danej chwili, przez co wie kiedy medium jest wolne a kiedy zajte. Gdy zachodzi potrzeba transmisji dany wze w przypadku braku aktywnoci na magistrali, zaczyna transmitowa dane, blokujc dostp innym wzom, ktre naturalnie przeczaj si w tryb odbioru. Czsto jednak wystpuj zdarzenia gdy dwa lub wicej wzw chce jednoczenie rozpocz transmisj danych. W takim przypadku stosowana jest tzw. logika iloczynu na rezystorze (wired and).
Sprztowo realizowana jest ona poprzez zwyky tranzystor bipolarny pracujcy w ukadzie otwartego kolektora. Jak wiadomo taki ukad tranzystora pozwala wymusi na wyjciu stan niski, ktry odpowiada stanowi dominujcemu w standardzie CAN. A wic gdy dany wze wystawi na magistral stan recesywny a wykryje stan dominujcy, przegrywa proces arbitrau, przechodzc w stan odbioru. Omawiany przypadek zosta przedstawiony na rysunku poniej:
-
Analizujc przykadow realizacj takiego mechanizmu, mona doj do wniosku, e najwikszy priorytet ma ramka o najmniejszej wartoci w polu identyfikatora. Niedopuszczalne jest zatem wysanie ramki o takim samym identyfikatorze z dwch rnych wzw, gdy moe to doprowadzi do nieprzewidywalnych skutkw. Natomiast dozwolone jest przesyanie ramek w formie podstawowej i rozszerzonej na tej samej magistrali, co w niektrych przypadkach moe zwikszy efektywno transmisji. Warstwa aplikacyjna Standard CAN posiada bogat rodzin standardw w warstwie aplikacyjnej i uytkownika. S to : CANopen Oparty na standardzie grupy CiA (CAN in Automation standard DS 301). Bardzo popularny protok, uywany w systemach wbudowanych. Pozwala stworzy w peni dynamiczn sie urzdze. Jest zorientowany na obiektowe przesyanie danych. Posiada mechanizmy takie jak PDO (Proccess Data Object), SDO (Service Data Object), NMT (Network Management), SYNC (Synchronization Object), EMG (Emergency Object). CAN Areospace standard wprowadzony przez NASA (National Aeronautic & Space Administration). Uywany do systemu kontrolno-nawigacyjnego. CAN Kindom - specyfikacja warstwy aplikacji stworzona przez szwedzka firm Kvaser AB. Zaakceptowana przez organizacj CiA, oraz dostpna bez opat. Daje on projektantom swobod w tworzeniu wasnego systemu, otwierajc moliwo do projektowania systemu moduowego.
-
Device Net szeroko stosowany w aplikacjach automatyki przemysowej Jest to otwarty standard sieciowy warstwy aplikacyjnej stworzony przez firm Rocwell/Allen-Bardley. Rozwizanie jest zaakceptowane przez CiA. SDS - (Smart Distributed System) specyfikacja stworzona przez firm Honeywell, zajmujc si systemami sterujcymi oraz kontrolno-pomiarowymi. Specyfikacja jest oglnie dostpna bez dodatkowych opat i zatwierdzona przez organizacj CiA. SafetyBus standard opracowany przez grup Safety Network International e.V. Stosowany w przemyle transportowym, i automatyce przemysowej SAE - standard zdefiniowany przez grup Society of Automotive Engineers. Stosowany jest jako system komunikacji urzdze kontrolnych, pomiarowych w samochodach osobowych (J1850) i ciarowych (J1939) (USA) Zastosowanie Magistrala CAN jest powszechnie stosowana w rnych dziedzinach. W przemyle motoryzacyjnym na bazie magistrali CAN realizuje si cyfrowa magistral pojazdw. Jest ona gwnym medium zbiorczym dla sensorw, ukadw wykonawczych, jak i elementw dodatkowych.Stosowana technika priorytetw standardu CAN pozwala na rozgraniczenie sterowania z jednej strony elementw nadzwyczaj wanych, takich jak poduszki powietrzne, z drugiej strony kwestii bahych takich jak transmisja danych midzy sprztem dodatkowym A wic na "CANie" spoczywa bardzo dua odpowiedzialno.








![REDUCTION OF CHANGEOVER TIME IN A CNC MILLING … · application of MTS it is possible to join the plates, so that even long pieces can be machined [22]. MTS or MTS + plates can be](https://static.fdocuments.pl/doc/165x107/613ab8460051793c8c013390/reduction-of-changeover-time-in-a-cnc-milling-application-of-mts-it-is-possible.jpg)