BIULETYN - Wojskowa Akademia Techniczna
43
WOJSKOWA AKADEMIA TECHNICZNA BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH WARSZAWA NR 11/2013
Transcript of BIULETYN - Wojskowa Akademia Techniczna

WOJSKOWA AKADEMIA TECHNICZNA
BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH
WARSZAWA NR 11/2013

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH KOLEGIUM REDAKCYJNE prof. dr hab. inż. Andrzej Ameljańczyk dr hab. inż. Ryszard Antkiewicz prof. dr hab. inż. Marian Chudy (redaktor naczelny) dr Lucjan Kowalski (redaktor statystyczny) dr hab. inż. Andrzej Najgebauer dr hab. inż. Tadeusz Nowicki dr hab. inż. Bolesław Szafrański dr hab. inż. Zbigniew Tarapata (redaktor tematyczny) prof. dr hab. inż. Andrzej Walczak (redaktor tematyczny) dr hab. inż. Kazimierz Worwa ADRES REDAKCJI Redakcja Biuletynu Instytutu Systemów Informatycznych Wydział Cybernetyki Wojskowej Akademii Technicznej 00-908 Warszawa, ul. S. Kaliskiego 2 e-mail: [email protected] tel.: (22)683-95-04, fax: (22)683-78-58 http://biuletynisi.wcy.wat.edu.pl Biuletyn ISI jest czasopismem indeksowanym w bazach: http://baztech.icm.edu.pl/ http://indexcopernicus.com/ Opracowanie stylistyczne w j. polskim: Jolanta Karaś Redakcja techniczna i projekt graficzny okładki: Barbara Fedyna Wydawca: Instytut Systemów Informatycznych Wydziału Cybernetyki WAT ISSN 1508-4183 Wersją pierwotną (referencyjną) czasopisma jest wydanie papierowe. Druk: Remigraf Sp. z o.o., ul. Dźwigowa 61, 01-376 Warszawa

SPIS TREŚCI
1. R. Kasprzyk, M. Cieślewicz, K. Krajewski, M. Perka, A. Stachurski
SAVE – State of the Art and Visionary Energetics …………………………………… 1
2. R. Kasprzyk, M. Zabielski, P. Kowalski, G. Oksiuta, K. Rzempołucha
GUARDIAN – Emergency Response System with Incremental Information
Delivery Model ..………………..………………………………………………….… 7
3. J. Koszela, T. Drozdowski, M. Niedziela, H. Ostap, R. Wantoch-Rekowski
Zaawansowane metody przygotowania danych terenowych do symulatora
szczebla taktycznego VBS2 …………………………………….…………………… 15
4. T. Rzeźniczak
Applying the Concept of Figural Goodness for Automatic Design to Dataset
Visualization …………………………………….……………….……………….…. 23
5. J. Szymonik
Sztuczne sieci neuronowe o radialnych funkcjach bazowych do śledzenia obiektów
w obrazach wideo …………………………………………………………………… 33


BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 1−6 (2013)
1
SAVE − State of the Art and Visionary Energetics
R. KASPRZYK, M. CIEŚLEWICZ, K. KRAJEWSKI, M. PERKA, A. STACHURSKI [email protected]
Institute of Computer and Information Systems
Faculty of Cybernetics, Military University of Technology Kaliskiego Str. 2, 00-908 Warsaw
The paper focuses on the attempt to improve the process of modeling the electrical grid infrastructure, designed within project SAVE (State of the Art and Visionary Energetics). The system, which is a response to a still increasing demand for electricity, will enable optimizing and planning the development of the existing energy transmission grid on the basis of the Smart Grid concept. Such an approach may support the process of setting up new companies interested in building renewable power plants and will encourage potential ”prosumers” to share their surplus of energy. SAVE may also show how to wisely use the energy and how expensive energy wasting can be.
Keywords: energetics, grid, network system, optimization. 1. Introduction Every day we use many appliances powered by electricity. These are everywhere, designed to support our daily duties and to provide various forms of entertainment. Besides, most of the produced electricity is consumed by modern sectors of industry. This proves that our civilization, high standard of living and economic development is heavily dependent on energy.
According to recent surveys, the demand for electricity is still increasing. It is expected that energy consumption only in the EU will grow up by 15% in the next ten years. Even though the waste of electricity during its transmission is inevitable, for many countries around the world this becomes a huge national problem. It is estimated that Poland wastes about 12% of the produced electricity (about a half more than average in EU) [4], which, apart from a significant economic loss, seriously affects our natural environment. To avoid it we should pay attention to the technical conditions of the electrical grid infrastructure. Experts have also estimated, that between 71% and 90% of the existing energy transmission lines should be replaced in Poland [4], otherwise we will suffer a sharp increase in energy prices.
Another key issue, associated with the use of energy, is the emission of greenhouse gases into the atmosphere. The reason is that energy production in many countries is dependent on fossil fuels [1]. Global trends, however, seek to overcome this conventional approach because it
has bad influence on the environment and leads to climate changes. To achieve this, we must replace traditional energy production with CO2 − free sources or optimize the existing electricity infrastructure. At the same time, increased popularity and lower costs of building renewable power generators begin to encourage individuals to produce their own energy. However, it is very expensive to store the energy and the way of its generating from natural resources is strongly dependent on climate conditions (wind, sunlight etc.). As a result, it may be difficult to precisely estimate the amount of produced energy.
The main goal of the paper is to propose a solution showing a possible way of managing and developing optimal infrastructure of the electrical grid, called SAVE. 2. The SAVE project The main idea of SAVE (State of the Art and Visionary Energetics) is to design an efficient power distribution infrastructure enabling to simulate its real features. It seems to be an innovative approach because at the moment there is no system working in a Smart Grid technology dedicated for commercial use [3]. SAVE boosts a great chance to promote the idea of ”the prosumer” [2]. In order to conduct the project, we solved a series of optimization problems attached to electrical grids. These included minimization of transmission losses for the existing grid infrastructure as well as increasing the security of the whole power system. Relying on latest scientific researches,

2
SAVE perfnetworks characterist
Moreovconsumer othrough theIn this case location of distributionefficient. Aenvironmenhence reducfuels comblower enerreliability o
The syas effectivexpenses, itfrom the roptimal exp 3. SAVE
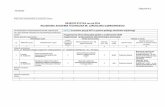
techn The SAVE in an n-tierlevel of scsystem. It (Figure 1):
R. Kaspr
forms the atopology,
ics. ver, withinof energy c
e spread of reSAVE may
f new power to make th
As a result, nt by reduccing the am
bustion. In trgy prices f the grid.
ystem’s perfove because, t may bring rreduction o
pansion of th
E’s architenologies
system is a r architecturecalability an
is divided
Fig. 1. Archite
rzyk, M. Cieśl
analysis of exploring
n a Smart can becomeenewable en answer a qur generatorshe grid mos
SAVE macing energy
mount of COthe long terand also
ormance canwith rela
rational beneof energy loe existing gr
ecture and
web applicae which prond extensibd into foll
ecture overview
lewicz, K. Kra
the complexits key
Grid everye a produceergy sourcesuestion of ths and energyst secure anday affect thy losses and
2 from fossirm this mayincrease th
n be regardedatively smalefits resultingoss and th
rid.
d used
ation workingovides a highility for thlowing tier
w
ajewski, M. P
x y
y er s. e y d e d il y e
d ll g e
g h e
rs
• Cw
• Pra u
• Lopral
• Inpr
• RTh
indepe• O
Qne
• C(u
• Ed Q
for .Nenvirondirectea variefirst sshortes
Wlibrarycrucialpath oextendmeasur
Inused PcreatinPrefusefeatureinteracfor tabtechniqconnecJava, tsource
Infor visuor oneformatdescribgrid (cits tran
Thbetweetransfeperformand cal
erka, A. Stach
lient tier –ith software resentation user-friendlyogic tierrocessing; cogorithms
ntegration trocessing fro
Resources tiehe SAVE ndent modul
OptimizationuickGraph aetwork systemommunicati
using the exisducational m
uickGraph iNet, Silverlnments. It
ed and undireety of netwosearch, breast path etc.
Within the SAy is mainly l characteristor maximumded by algorres calculatio
n order to crPrefuse, that ng rich inte supports
es for dataction. It provbles, graphsques, supporctivity [6]. Ptherefore it code for the
n the SAVE ualization of
e that was rt. In additionbed, showinapacity, cost
nsmission). here is a buen Prefuseerring data.ms all of thelculated resu
howski, SAVE
to enable th(via a web btier – desi
y GUI – respon
ontains impl
ier – taskedom data storaer – to collec
system coles listed bel
n module algorithms foms) ion modulesting social nmodule.
is a portablelight and
provides ected graph dork algorithmath first sea
AVE systemused to ev
tics, for exam flow [5].
rithms that on. eate our prois a set of
teractive daan extensimodelling,
vides optimiz, and trees,rt for animat
Prefuse is oriwas necessa
e .NET platfosystem, Preff the created read from thn, the edges
ng key chart of lines or e
uilt-in comme and Q All in operations,
ults are illustr
E…
he user to inbrowser) igned to gen
nsible for ementation o
d to separateage t and store donsists of ow: (using API
or deep analy
e for ”prosunetworking A
e library, suWindows Pcommonly
data structurems such as arch, A* s
m, the QuickGvaluate the
ample the shIt has also enable cen
oject we havsoftware tooata visualizive collectiovisualization
zed data stru, visual enction and datiginally writary to rewritorm. fuse is responetwork tophe GraphML
s of the grapracteristics oenergy loss d
munication chQuickGraph
all, Quickgwhile algori
rated by Pref
nteract
nerate
data of the
e data
data. three
I and ysis of
mers” API)
uitable Phone
used es and depth earch,
Graph most
hortest been
trality
e also ols for zation. on of n and ctures
coding tabase tten in te the
nsible pology
ML file ph are of the during
hannel for
kgraph ithmic fuse.

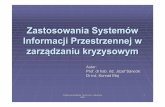
Figurtiers were of the
4. G The ithe stof thgraphtransfwith paramof potransmenerg
BIU
re 2 presentand layers wused to per
e SAVE syst
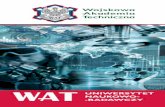
Graphical
intuitive intetructure of a
he editor, thh nodes: eneformers and
the edges.meters to eacower productmission, enegy consumpti
ULETYN INS
ts a packet-which showsform the cretem.
l user inter
erface allowsany electricalhe system energy producd end-users, In additio
ch edge deterion, capacityergy loss, mion (Figure 3
TYTUTU SY
-based strucs what techneated functio
Fig. 2. Pa
rface
s the user tol grid. With nables enterers (power , combining
on, users carmining the y, the cost ofmaximum lo3).
YSTEMÓW IN
cture of nologies onalities
acket-based st
o model the use ing the plants), g them an add amount
f energy oad and
Fig. 3. GUI o
NFORMATY
tructure of lay
verview
CZNYCH 11
yers
1−6 (2013)
3
3

4
We havwhile builditackle it, weBing (shown
After possible to the maximuminimum cThis is extexisting gsolutions.
5. Scena When the infrastructuachieve a sicost. Figuresystem SAV
R. Kaspr
ve also consing the grid ie used backgn in Figure 4building a simulate it
um flow, thecost fixed flotremely use
grid or com
arios
grid managre, it has to ignificant ime 5 presents aVE.
Fig. 5. SAV
rzyk, M. Cieśl
sidered terraiinfrastructureground maps4). dedicated n
ts real featu minimum cow in the prful when upmparing ne
Fig. 4
ger plans tobe decided w
mprovement aa use-case di
VE use cases
lewicz, K. Kra
in conditionse. In order tos provided by
network it iures, evaluatcost flow, throposed gridpgrading thew building
4. SAVE Syst
o modify itwhat to do toat a minimumiagram of th
ajewski, M. P
s, o y
is e e
d. e g
tem with back
ts o
m e
SAbuild aallows examinalgorithand bquestiothe potstoragewould
Ageneraresourcmoneywe areoffers to finthe mipossiblsurplus
ThcannotamongenergyThere
erka, A. Stach
kground map
AVE is a wa model of t
to performned grid, shms, showinad behavior
on of how ttential locatie batteries wbe at their lopart from th
ators for persces such a
y and knowle doomed to
a communnd a co-invissing resourle to easily s of energy.hese days, t even imaging manufactuy-efficient a
is a rich va
howski, SAVE
well-developthe grid topom a deep supported bng exactly rs. SAVE o expand thion of new pwhere the trowest. hat, building sonal use reqas the apprledge. Withofailure. To
nication platvestor whorces. With th
share or s
in fact, an ne how stron
urers can beand eco-frieariety of ele
E…
ped tool usology. Our s
analysis oby graph tits vulnerabmay answe
he grid, indicpower stationansmission
renewable pquires a variropriate locout any of prevent it, Stform that
o might prhis platformsell the pro
ordinary png the compee, while buendly appliaectrical equip
sed to ystem
of the theory bilities er the cating ns and losses
power ety of
cation, those,
SAVE helps
rovide m, it is
duced
person etition
uilding ances. pment

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 1−6 (2013)
5
to choose, at different prices, so we included a graphic energy calculator, which shows how long it will take to receive money spent on buying new appliances and then make it profitable, by saving the energy. 6. Development opportunities Due to a total lack of systems working in the Smart Grid technology SAVE is an innovative solution. It is designed for a wide range of clients including companies from the energy industry, green organizations and individuals. The target customer group is dependent on the dedicated functional module.
The SAVE system is able to reduce financial losses associated with electricity transmission waste and plan the optimum expansion of the existing grid infrastructure. This approach may support the process of setting up new companies interested in building renewable power plants and will encourage ”prosumers” to share their surplus of energy.
Capital resources for further development of the project will be provided by academic grants and partly by a company responsible for distributing energy. Clients will be supplied with software in two separate ways. Currently, it is possible to implement the system directly on their PCs, however, in the near future SAVE will be spread within a Windows Azure cloud.
At present, the SAVE project is in the final stage of prototype development (Technology Readiness Level 6). In the near future we plan to enter cooperation with a company responsible for distributing energy. We count on a fruitful cooperation in a win-win environment: the company receives free-of-charge a prototype of our system, while SAVE developers get valuable feedback on important changes and new functional modules needed.
Currently, the SAVE optimization module performs simulation on the segment of the grid topology, however, it will be dedicated for a larger area. This will result in a significant increase in the need for computing power. Therefore, we plan to use cloud computing models (Windows Azure) for further calculations.
It is also planned to extend the educational module with a strategy game, showing overall benefits derived from wise use of energy. This will also prove an overwhelming advantage of renewable energy resources over conventional ones for the environment in the future.
7. Summary As we can see, a still increasing demand for electricity determines not only the production growth, but also enforces the search for new and more effective solutions enabling to save it. Currently a large amount of energy is wasted during its transmission from the power plant to the end user. Of course, it is not possible to completely eliminate the problem, however, system that was described in the article is an attempt to make energy system more economical and efficient. It was developed on the basis of the SMART GRID concept and the theory of graphs and networks. With the use of optimization complex algorithms the system allows to assess energy transmission losses and additionally, proposes a sensible and planned energy production process, including the prosumer market share. This solution will certainly help to reduce energy costs and the energy from the alternative sources would become more environmentally friendly. Moreover, a well-planned modernization of the existing energy infrastructure, and the construction of smart grids will definitely improve the energy security of the country.
It is also worth noting that the system, which provides a layered architecture, is flexible and its functionalities can be easily updated and customized for the needs of the particular customer. 8. Bibliography [1] EREC, ”Renewable Energy Technology
Roadmap up to 2020”, http://www.erec.org/ fileadmin/erec_docs/Documents/Publications/EREC-Technoloy_Roadmap_def1.pdf.
[2] KIGEiT, ”Prosumer w ’Smart Grid’, czyli energetyka obywatelska oparta na źródłach energii odnawialnej, wysokoefektywnej ko-generacji, racjonalizacji zużycia, redukcji strat przemysłowych”, www.kigeit.org.pl.
[3] IEC, ”Smart Grid Standarization Roadmap”, http://www.iec.ch/smartgrid/ downloads/sg3_roadmap.pdf.
[4] http://www.rp.pl/artykul/649811.html. [5] http://quickgraph.codeplex.com/. [6] http://prefuse.org.

R. Kasprzyk, M. Cieślewicz, K. Krajewski, M. Perka, A. Stachowski, SAVE…
6
SAVE – Energetyka przyszłości
R. KASPRZYK, M. CIEŚLEWICZ, K. KRAJEWSKI, M. PERKA, A. STACHURSKI Artykuł ma na celu zademonstrowanie możliwości wykorzystania systemu SAVE w procesie optymalizacji istniejących sieci energetycznych, a także modelowania nowych. System ten jest odpowiedzią na wciąż rosnące zapotrzebowanie na energię elektryczną i brak nowoczesnych technologii w przemyśle energetycznym. System realizuje postawione mu zadania w oparciu o wkraczającą na światowy rynek koncepcję Smart Grid. Takie podejście pozwoli wesprzeć proces tworzenia nowych przedsiębiorstw, zainteresowanych budową elektrowni odnawialnych, i będzie zachęcać potencjalnych „prosumentów”, by przekazywali swoje nadwyżki energii. System SAVE może pokazać również, jak odpowiedzialnie korzystać z energii i jak kosztowne mogą być jej straty.
Słowa kluczowe: energetyka, sieć elektryczna, systemy sieciowe, optymalizacja.

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 7−13 (2013)
7
GUARDIAN – Emergency Response System with Incremental Information Delivery Model
R. KASPRZYK, M. ZABIELSKI, P. KOWALSKI, G. OKSIUTA, K. RZEMPOŁUCH [email protected]
Institute of Computer and Information Systems
Faculty of Cybernetics, Military University of Technology Kaliskiego Str. 2, 00-908 Warsaw
The main goal of this article is to show concepts of developing Emergency Response Systems (ERS), which withstands to the modern way of thinking about threat notification. It is also showed an idea of an incremental information delivery model – the new way of thinking about emergency actions management. The last issue considered are guidelines to develop Emergency Response Systems.
Keywords: emergency response system, Safety-Oriented Society, incremental information delivery model. 1. Introduction In the modern world, people have to face many dangerous situations: from robberies, rapes and fires to car accidents or murders. Most of the crimes included in the police statistics could be detected on the spot, if the emergency services could react early enough. The response time is one of the main factors in any rescue operation in order to maximize the chance of saving a human’s life.
There exist a number of solutions to presented issue ([3], [11], [12], [15]). The most promising are IT Emergency Response Systems (ERS) and IT Rapid Emergency Response Systems (RERS), which seem to have the shortest response time. The domain of ERS systems is still dynamically developed and many new solutions appear ([23], [24]). However, they are still imperfect, mainly because of their approach to reporting threats and delivering information about accident during rescue procedures [7].
The goal of this paper is the presentation of GUARDIAN – Emergency Response System developed at the Warsaw Military University of Technology. The article also describes an incremental information delivery model and the idea of Safety-Oriented Society. The last section presents guidelines which technologies are the best to implement the new model of information delivering and its utilization during rescue procedures.
The article does not describe in detail the organization of rescue action management.
More information about this problem can be obtained in [14] and [16].
The remainder of this paper is organized as follows. Section 2 introduces the GUARDIAN project and shortly describes its essential features. In Section 3, the GUARDIAN’s architecture is discussed. Section 4 shows the basic execution path of considered Emergency Response System. In Section 5, the Incremental information delivery model is showed, which is used in GUARDIAN project. Section 6 compares GUARDIAN with the other IT ERS solutions. Section 7 describes realization capabilities of IT Emergency Response Systems. In Section 8, we discuss problems and development opportunities of GUARDIAN. Section 9 shows short summary of our conclusions resulting from work on GUARDIAN system.
2. The GUARDIAN project GUARDIAN is a new type of Emergency Response System, which is it considered as a RERS system [25]. It has been developed for rapid response to the occurrence of any kinds of threats. Using a mobile technology, including GPS and smartphones, GUARDIAN allows to instantly call for help in just a few seconds. With use of GUARDIAN installed on the phone it is possible to quickly notify the nearby emergency services with just one click about the danger. Therefore, it provides an effective solution, where protecting the health and life of a human is important.

8
Researinformationare highly the emergento spend upthe operatorinto accounwithstand four minutcaused by procedure. process is cmuch of huconclusion procedures and the ochannel. Wimplementeprovides threscue proce• the aut
about tto start
• the supthe headqu
• the prabout t
3. GUAR GUARDIANFigure 1. ThReporter CCentral Serv
Fig. 1. The
R. Kasprzyk
rch shows tn systems devineffective [ncy number p to six minr. This is und
nt that, for exwithout oxytes. Describ
complexityDespite th
constantly imuman intera
that the is the huma
other side With that ed GUARDhree essentiaedures: tomation of the threat – t a rescue actpport of the emergency
uarters rovision of the rescue ac
RDIAN's
N’s archithe system halient, the Emver.
architecture o
k, M. Zabielsk
that the cuveloped to r[6]. For examin Poland, it
nutes to repodoubtedly toxample, humygen for apbed problemy of repor
he fact, thamproving, it saction. This
bottleneck an reaction of the coin mind,
DIAN – a al features
the process only one cli
tion communica
services
up to date ction status.
architectu
tecture is as a three mmergency C
of the GUARD
ki, P. Kowalsk
urrently usedreport threadmple, callingt is necessary
ort a threat too long taking
man brain canpproximately
m is mainlyrting threat
at mentionedstill needs too
leads to thof rescu
both on onommunication
our teamsystem thain managing
of notifyingick is needed
ation betweenand th
information
ure
shown onmain parts: th
lient and th
DIAN system
ki, G. Oksiuta,
d ds g y o g n y y ts d o e e e n
m at g
g d
n e
n
n e e
Thdeployis a mand a user tosuch a(entereGUARand esits typadditioprimarapproarescue which informaction for a delay t
AsystemreceiviemergeapplicaGooglenetworpath. Thave taDatabaprovidcalled [22]) procedthreats
ThEmergon the receiveoccurs commuassigne
EathroughXML-Rcommuif oneunavairequirecommu
4. B To exduringon Figu
, K. Rzempołu
he Reporter yed on a Smamobile applic
specially deo send a notifs the positio
ed during RDIAN mobsential informpe. The apponal forms wry notificatiach enables e
action withis necessary
mation can beavoiding thwhole info
the rescue opnother com
m is the Cening notificatiency units tation on the Maps APIrk algorithm The data aboaken place sase. In this es data for pAAR – the in order
dures for any. he third pency ClientSmartphone
e notificationear them
unicate withed to threat aach part ofh a Wi-Fi RPC protocunicate with e of the lable. It mee
ements of thunication cha
Basic execu
xplain the rescue pro
ure 2 is prese
uch, GUARDI
Client is a partphone, whcation. Usingesigned widfication with on, basic per
the instaile applicatimation abouplication pr
which can beion about emergency seh a minimumy to launch e delivered
he situation, ormation aboperation.
mponent of ntral Server.ions and assto them. Tohe Central I and a spec
to find the out all the reo far are sto
way the ost-incident After Actioto develop
y kind of fut
part of the. Using a m
e, it allows eons about tm and provh every unand the headqf GUARDIA
or GPRS col [8], wother parts ocommunica
ets one of thhe ERS systannels.
ution path
way GUARcedures, an ented.
IAN…
part of the shich means g a GPS Mget, it allowbasic inform
rsonal informallation of on on the p
ut the incidenrovides a s filled in aftthe threat. ervices to stam of informit. All addi
during the rin which w
out accident
the GUARD Its main ta
signing the co achieve th
Server usecialized grapshortest or fescue action
ored in the CCentral Datanalysis (whn Review prp better rture incident
e system imobile applicmergency unthe accidentvide servicit that has quarters.
AN can be connection
which allowof the systemation channhe most imptem i.e. a se
RDIAN opactivity dia
ystem that it
Module ws the mation mation f the phone) nt e.g. set of ter the
This art the mation itional rescue
waiting t will
DIAN ask is closest is the
es the ph and fastest ns that Central tabase hich is rocess rescue ts and
is an cation nits to t that es to
been
wired using
ws to m even nel is portant everal
perates agram

Fig.
I
on tsmartpersoconsishoul
Na notfrom aboutinformthis, emergrescu
Mto senis comdelivnext s
Dretriewhicha restype are nplacearea. dynamactionallowServea unopera
BIU
2. Activity dithe G
In the first sthe widget tphone. Afte
on calling fistent with ld be minimiNext, the tification abit. The basic
t the applicamation and t
GUARDIAgency units
ue services usMeanwhile tnd additionampletely optery model wsection. During that
eves notificath contains scue action:
of the threanotified aboue during the
This featumically chann. Addition
ws emergencyer about the snit notifies ation, the wh
ULETYN INST
iagram for basGUARDIAN
tep is sent aninstalled
er that, the for help is the idea th
ized. Central
out the danc message cant's positiothe type of t
AN searchesand sends ansing XML-Rthe applicantal data abouttional. This k
will be descri
time, the tion sent by informationthe place o
at. Moreoveut changes ine rescue acture helps tnging situationally, the y services tostate of the rabout the ehole procedu
TYTUTU SY
sic execution psystem
n alarm by con the Apengagementfinished, w
hat human
Server rger and reaontains infor
on, his/her pthe threat. Bas for the n alert to des
RPC protocolt has an oppot the incidentkind of inforibed in detai
Emergency the Central
n needed tof accident aer, emergencn situation thtion in endato respond on during theEmergency
o inform the rescue actionend of the ure is termin
STEMÓW IN
path of
clicking pplicant t of the
which is activity
receives ds data rmation
personal ased on nearest
signated l. ortunity t, but it rmation il in the
Client Server,
to start and the cy units hat take angered to the
e rescue Client
Central n. When
rescue nated as
wG
5
DGntHhiiGi
GTithetteprssafa
NFORMATYC
well as thGUARDIAN
5. Increm
model
During analGUARDIANnotifying thethe activity However, duhas an oinformation information GUARDIANinformation
The ideGUARDIANThe informaincrementallthey includehis GPS coendangered pto summon. the primary enough to stpossible to srequired equsituation givsend additiona photo fromforms or dautomatic tel
Fig. 3. Diagrmodel on th
CZNYCH 11 7
he basic exN system.
mental infol
lysis of the N system we Central Se
of the appuring a rescopportunity about the i
delivery, N purposes, delivery mod
ea of mentioN system, isation about ly. Firstly one: personal inoordinates, wplace and typEven thougmessage is
tart a rescue end appropri
uipment into ves an oppornal data, wh
m the endangdeliver morelephone serv
ram of incremhe example of
7−13 (2013)
xecution pa
formation
execution we can seeerver about tplicant can bcue action th
to send incident. Th
for this called
del. oned model, s showed oan incident
nly basic datanformation owhich allowpe of emerg
gh the informquite modesaction. Usiniate emergenright place.
rtunity, an apich contains
gered place, fe informatiovice.
ental informa
f the GUARDI
9
ath of the
delivery
path of thee that afterthe incident,be finished.he applicant
additionalis model of
he projectincremental
included inn Figure 3.is delivered
a is sent andof applicant,
ws to detectency servicemation fromst, it is goodng them, it isncy unit with
Then, if thepplicant canfor instance
filled specialon using an
ation delivery IAN system
e
e r , . t l f t l
n .
d d , t e
m d s h e n e l n

R. Kasprzyk, M. Zabielski, P. Kowalski, G. Oksiuta, K. Rzempołuch, GUARDIAN…
10
To sum up, the incremental information delivery model assumes that: 1) there is one type of notification, which is
obligatory to start a rescue action; 2) other steps of information delivery are
optional and they are used to extend the knowledge about the situation at the endangered place all the time during the rescue action. The presented idea is an approach, which is
adequate to the dynamics of situation at the endangered area. This lead to conclusion, that the idea of the incremental information delivery model should be implemented in every ERS currently developed, which allows applications to improve the time of reaction to the reported threats.
6. Comparison with other systems GUARDIAN with his incremental information delivery model is not the only way to respond to the dynamically nature of rescue actions. For example, some of modern rapid response ERS systems use other types of handling the dynamic nature of threats, which is reflected in computer simulation or predictive models.
One of solution from that domain is framework, developed by J. Sanjay and Ch. McLean [4]. It allows modeling and simulation for emergency response, which is especially useful in rescue action process developing. Using provided models of reaction for appropriately threat, it gives us opportunity to predict human behavior during danger situation. However, it does not implement any mechanisms to inform about the threats, but only to analyze rescue action.
Another solution, which is connected with RERS systems is FireFly [2]. Using danger prediction model, including fire zone model [5], and evacuation path finder, it informs about the threat and simultaneously determines the best evacuation path. This approach fits well in complex buildings and areas seems to be a complete technology for saving human life. Unfortunately, for best work it requires a set of sensors situated in analyzed place, which is expensive and limits mobility of system.
Apart from those system mentioned earlier, there are more other solutions. Some models used to monitoring threats like radiation or contamination are presented in ([13], [17]). Simulation models of diseases spreading can be found in ([19], [21]). Predictive models has been applied in another system developed at Military University of Technology named CARE
and FireFly, mentioned earlier. More information about this solution can be found in ([2], [18], [20]).
7. Realization capabilities The idea of the incremental information delivery model and modern technology, like wireless connection and GPS, make possible to create very effective RERS systems. Based on the experience gained during the development of the GUARDIAN it can be said, that some of the technologies are the best matches to develop effective emergency response systems. These technologies include dedicated electronic devices, Web Services and mobile platforms.
One of the solutions, which should be considered, is implementing Emergency Response System using dedicated electronic devices. The architecture of this approach is similar to the one used on the mobile platform except that mobile devices are replaced by specially designed electronic devices. This approach gives us promising possibilities. In this case, we can use a wireless connection or a GPS module, but also any kind of sensors that can monitor the environment (including a person’s health) and automatically notify emergency services about any threats. Thanks to that, it is possible to receive profit from both the mobile platform and web services with additional features, provided with more electronic elements. But there are also some disadvantages of this solution. Using dedicated electronic devices, the targeted market is narrower (due to cost of the solution). This results in a smaller group that can be saved using the system.
Web Services is another valuable technology to develop the modern emergency response system. Using Web Services we can provide a notification service, deployed on a server that can be obtained from every device which is connected to the Internet. This solution seems to be quite attractive because there is no need to use any dedicated devices. However, there are also disadvantages that significantly reduce the effectiveness of the Web Services. First of all, we have restricted precision to determine the accurate position of the endangered person, because described approach do not include a GPS module. Detecting the position through Wi-Fi or Internet Service Provider data is not adequate enough in many real situation due to large approximation of these technologies. In this way it is worth to use mobile platforms with a GPS module, which are installed in most modern mobile devices.

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 7−13 (2013)
11
In our opinion, the best way to develop an Emergency Response System that suits current needs is the mobile platform, with use of GPS system and programs, like widget, developed on mobile operating system. That is the reason for creating GUARDIAN in the presented way, using Android and Windows Phone operating system and mobile devices equipped with GPS module. This approach assumes that users have a mobile device such as a smartphone or tablet with the mobile application, which allows user to send notifications to the Central Server. Mobile platforms provide some crucial services during a rescue action, for instance a wireless connection and a GPS module ([9], [10]). Fortunately, the current situation on the mobile device market suggests that the amount of mobile device users will grow year by year. In conjunction with high precision in detecting endangered place, the mobile platform is one of the most adapted technology intended to develop rapid response ERS systems.
These considerations show a classic problem of balancing costs and capabilities. The presented approaches are different taking into account usability, features and costliness. Moreover, the field of the RERS systems is still young and dynamically developed, so looking for one best solution is unfounded. 8. Problems and development
opportunities Despite the fact, that GUARDIAN implements most of features connected with modern RERS systems, there are still some problems that are not completely solved, for example: When an applicant informs the Central Server
about the danger the basic message can give us fast information about the place of the danger only in the case when the applicant is in the endangered place. To solve this, we have provided a special form to fill, but this results in violating the incremental information delivery model. So the main problem is to provide a solution which is consistent with the model;
If an applicant sends a notification and his mobile devices is stolen, the thief can cancel the alarm. The solution is to create an authorization and authentication mechanism, but this results in additional delay in the process of threat notification. Although the functionality of the
GUARDIAN system seems to be sufficient,
there are some ways to extend its capabilities, which includes for example: 1) Patient card − After installing the Reporter
Client, the application will be asking for basic information about user's health. The answer to the questions will be optional, but they will allow to provide the best medical help in case of a danger;
2) Crime maps − Using data gained during rescue operations, the GUARDIAN system will be able to create crime maps, which will show the most dangerous areas, sorted by the type of a threat. This feature will be useful especially for the police and other emergency services;
3) Visualization of rescue operations − Another idea is to provide a management panel in the system with basic statistics and information about ongoing rescue operations. This could help decision makers in the headquarters to choose the best solution. We are convinced that this way of data visualization is very important, especially when we are talking about a system which is crucial for a human life;
4) Analytical tools to explore and mining data from the Central Database, particularly in the context of danger notification procedure optimization. The data gained by the GUARDIAN system
will allow to do some research into the effectiveness of rescue actions and used procedures. It will also be helpful to do post-accident analysis, which could even be evidence in some sort of cases. Using data mining methods, we could be able to search for some patterns in incidents and thanks to that we could develop a method, for instance, to predict the execution of rescue operation. This kind of knowledge is invaluable when human life is paramount. 9. Summary Because domain of Emergency Response System is relatively new branch of IT systems, we suppose that many of innovative approaches will appear soon. One of the solutions, presented in this paper, is the GUARDIAN system, which fulfils the principles of creating modern ERS systems defined in the article. Additionally, we have identified some rules to create that kind of systems and technologies useful to satisfy all the presented requirements. In one of the sections were presented some of best practices, suggested to implement for every innovative Emergency Response System.

R. Kasprzyk, M. Zabielski, P. Kowalski, G. Oksiuta, K. Rzempołuch, GUARDIAN…
12
To provide the best system for rapid response to threats, we have to replace operators in headquarters and standard methods with new solutions. The GUARDIAN system gives an opportunity to create an innovative ERS system and allows to take the first steps in implementing the guidelines described earlier.
10. Bibliography [1] http://www.statystyka.policja.pl/portal/st/91
8/Wybrane_statystyki.html − Selected police statistics, 2011.
[2] M. Kapałka, J. Przychodzeń, M. Zabielski, „Koncepcja systemu wspomagającego ewakuację z wykorzystaniem modeli prognozowania zagrożenia”, Kwartalnik Polskiego Towarzystwa Symulacji Komputerowej, Vol. 3 (2011).
[3] http://ec.europa.eu/echo/policies/disaster_response/mechanism_en.htm − The Community mechanism of civil protection, European Commission.
[4] J. Sanjay, and Ch. McLean. ”Simulation for emergency response: a framework for modeling and simulation for emergency response”, Proceedings of the 35th Conference on Winter Simulation: Driving Innovation. Winter Simulation Conference, 2003.
[5] A. Karp, Sz. Łukasik, „Symulacja pożaru budynku”, engineering work, promoter dr inż. Jarosław Wąs, Akademia Górniczo- -Hutnicza w Krakowie, 2011.
[6] http://www.straz.gov.pl/data/binaries/pdf/spr_opis.pdf − „Założenia do organizacji i funkcjonowania systemu powiadamiania ratunkowego na obszarze województwa”, National Headquarters of the State Fire Service of Poland.
[7] K. Ficoń, „Jakościowy model identyfikacyj-ny systemu reagowania kryzysowego”, Zeszyty naukowe Akademii Marynarki Wojennej, XLVIII, Nr 4 (2007).
[8] http://www.xmlrpc.com – XML-RPC standard webpage, UserLand Software.
[9] E. Burnette, ”Hello, Android. Programowanie na platformę Google dla urządzeń mobilnych”, IIIrd edition, Helion, 2011.
[10] http://wazniak.mimuw.edu.pl/index.php? title=Systemy_mobilne − Materials connected with mobile systems by Mikołaj Sobczak.
[11] http://isok.imgw.pl/home − Informatyczny System Osłony Kraju, Ministry of Regional Development.
[12] http://rcb.gov.pl/?page_id=12 − The Daily Reports System, Krajowe Centrum Zarządzania Kryzysowego.
[13] R. Kalinowski, Monitorowanie zagrożeń, UPH Publishing, Siedlce, 2003.
[14] M. Żuber, Katastrofy naturalne i cywilizacyjne: zagrożenia i reagowanie kryzysowe, Wyższa Szkoła Oficerska Wojsk Lądowych im. gen. Tadeusza Kościuszki, Wrocław, 2006.
[15] http://www.projektproteus.pl/index.php − „Zintegrowany mobilny system wspomagający działania antyterrorystyczne i antykryzysowe” − Proteus Project, Industrial Research Institute for Automation and Measurements.
[16] E. Kołodziński, „Zagrożenia bezpieczeń-stwa i organizacja przeciwdziałania ich skutkom”, Infokart S.A., 2005.
[17] Z. Mierczyk, „Zaawansowane technologie monitorowania zagrożeń bezpieczeństwa”, VI Międzynarodowa Konferencja Naukowa Zarządzanie Kryzysowe, Olsztyn, 2008.
[18] R. Kasprzyk, B. Lipiński, K. Wilkos, C. Bartosiak, ”CARE − Creative Application to Remedy Epidemics”, Biuletyn Instytutu Systemów Infor-matycznych, Nr 3, 45−52, (2009).
[19] R. Kasprzyk, A. Najgebauer, D. Pierzchała, ”Modelling and Simulation of Infection Disease in Social Networks”, Computational Collective Intelligence, LNAI 6922, 388−398 (2011).
[20] R. Kasprzyk, C. Bartosiak, K. Szkółka, P. Giętkowski, ”CARE2 – Creative Application to Remedy Epidemics”, in: Technologie podwójnego zastosowania, 65−75, WAT, Warszawa, 2012.
[21] R. Kasprzyk, ”Diffusion in Networks”, Journal of Telecommunications and Information Technology, Nr 2, 99−106, (2012).
[22] http://www.au.af.mil/au/awc/awcgate/army/tc_25-20/tc25-20.pdf − ”A Leader’s Guide to After-Action Reviews” (TC25-20), US Army.
[23] X. Li and P. Fu, ”A spatial diffusion model for police emergency response system”, International Conference on Remote Sensing, Environment and Transportation Engineering (RSETE), 2011.
[24] A. Fruhling, „STATPack™ An Emergency Response System for Microbiology Laboratory Diagnostics and Consultation”, Advances in Management Information Systems, Vol. 16, 123−149 (2010).

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 7−13 (2013)
13
[25] R. Chen, R. Sharman, H. R. Rao, S. J. Upadhyaya, ”Coordination in emergency response management”, Communications of the ACM, Vol. 51, 66−73 (2008).
GUARDIAN − system reagowania na zagrożenia z przyrostowym modelem
dostarczania informacji
R. KASPRZYK, M. ZABIELSKI, P. KOWALSKI, G. OKSIUTA, K. RZEMPOŁUCH
Głównym celem artykułu jest przedstawienie współczesnych koncepcji dotyczących systemów reagowania na zagrożenia oraz idei społeczeństwa zorientowanego na bezpieczeństwo. Zaprezentowany został również pomysł przyrostowego modelu dostarczania informacji – podejścia, które w sposób istotny zmienia sposób myślenia o kwestii zarządzania akcją ratunkową. Ponadto omówiono możliwości rozwoju współczesnych systemów reagowania na zagrożenia na przykładzie systemu GUARDIAN wytworzonego i rozwijanego w Wojskowej Akademii Technicznej.
Słowa kluczowe: społeczeństwo zorientowane na bezpieczeństwo, system reagowania na zagrożenia, przyrostowy model dostarczania informacji.


BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 15–22 (2013)
15
Zaawansowane metody przygotowania danych terenowych do symulatora
szczebla taktycznego VBS2
J. KOSZELA, T. DROZDOWSKI, M. NIEDZIELA, H. OSTAP, R. WANTOCH-REKOWSKI
Wojskowa Akademia Techniczna, Wydział Cybernetyki, ul. Gen. Sylwestra Kaliskiego 2, 00-908 Warszawa
Artykuł zawiera opis procesu wytwarzania danych terenowych dla szczebla taktycznego VBS2. Zaprezentowano model terenu wykorzystywany w tym symulatorze oraz formaty danych terenowych, na podstawie których generowany może być wskazany teren. Następnie przedstawiono technologie i środowiska wykorzystane do generacji terenu ze wskazaniem najważniejszych właściwości. Zarówno w przypadku formatów danych (SHP, GDB, VPF, TDED), jak i narzędzi szczególną uwagę zwrócono na aspekt dostępności do specyfikacji dostępnych formatów danych. Artykuł kończy opis procesu generacji danych terenowych dla wybranego obszaru rzeczywistego na potrzeby VBS2.
Słowa kluczowe: VBS2, symulacja, dane terenowe. 1. Wprowadzenie Jednym z aspektów przygotowania ćwiczeń wspomaganych komputerowo, także z wykorzystaniem symulatora VBS2, jest przygotowanie odpowiednich danych terenowych. Aspekt ten jest szczególnie ważny w przypadku symulatora VBS2, który znajduje zastosowanie na bardzo niskim szczeblu z wymaganiem na dużą dokładność zobrazowania obiektów (rysunek 1).
Rys. 1. Przykład zobrazowania w symulatorze VBS2
2. Podstawowe właściwości
symulatora VBS2 Symulator VBS2 umożliwia symulację działań pojedynczego żołnierza i pojazdu. VBS2 należy do klasy symulatorów wirtualnych z krokowym upływem czasu. Pozwala także na symulację większych grup: plutonów, kompanii. Ograniczenia w zakresie maksymalnego
szczebla symulowanych wojsk wynikają jedynie z ilości dostępnych zasobów dla symulatora, w szczególności pamięci operacyjnej. Symulacja wyglądem przypomina grę typu FPS (ang. First-person shooter), jednakże we wnętrzu tkwi zaawan-sowany silnik symulacyjny. Na wyniki symulacji mają między innymi wpływ takie aspekty jak pogoda, rodzaj użytej broni i amunicji, zmęczenie, wyszkolenie, morale, rozpoznanie. Symulator VBS2 umożliwia równoległy udział w symulacji wielu graczy, zarówno współdziałających ze sobą, jak i działających po przeciwnych stronach konfliktu. W trakcie trwania symulacji ad-ministrator może na bieżąco modyfikować scenariusz, dostosowując go do potrzeb szkoleniowych. Rozbudowane moduły edytora misji oraz analizy posymulacyjnej dopełniają funkcjonalność niezbędną do użycia VBS2 w szkoleniu. Dodatkowo VBS2 umożliwia rozbudowę swojej funkcjonalności poprzez dostępne API i bardzo elastyczny język skryptowy. 3. Podstawowe elementy modelu
terenu symulatora VBS2 Symulator VBS2 generuje trójwymiarowe zobrazowanie symulacji, co wymaga od formatu zapisu terenu w nim wykorzystywanego niezwykłej szczegółowości, co docelowo ma zapewnić pozytywne wrażenia użytkowników symulatora. Teren w symulatorze VBS2 przechowywany jest w skompresowanych

J. Koszela, T. Drozdowski, M. Niedziela, H. Ostap, R. Wantoch-Rekowski, Zaawansowane metody…
16
plikach (.pbo). Zawartość pliku (.pbo) stanowią: plik z ukształtowaniem terenu (.wrp), tekstury (.png), pliki z opisem materiałów (.rvmat), modele 3D obiektów występujących na mapie (.p3d), skrypty i pliki konfiguracyjne (.lbt), (.cpp). Model terenu w VBS2 ma strukturę warstwową. Największą objętościowo i najważ-niejszą warstwą jest warstwa ukształ- towania terenu, zawierająca siatkę punktów wysokościowych. Punkty siatki rozmieszczone są równomiernie, a odległość pomiędzy nimi określa dokładność odwzorowania terenu i deter-minuje wielkość zajętej pamięci w komputerze. Mapa VBS2 o rozmiarach 10 km x 10 km, z do-kładnością 10 m, zajmuje około 50 MB pamięci.
Rys. 2. Fragment terenu w VBS2 z zaznaczonym podziałem na komórki
Na rysunku 2 widać punkty tworzące siatkę punktów wysokościowych, rozmieszczonych co 10 m. Na teren nałożona jest tekstura na podstawie zdjęcia satelitarnego, które przy takiej dokładności mapy ma dokładność 1 texel/1 m. Na siatce punktów wysokościowych zbudowane są komórki terenu, które pełnią kluczową rolę w symulatorze, gdyż są wykorzystywane do wyznaczania dróg dla przemieszczających się obiektów. Służą również w procesie wy-znaczania kolizji pomiędzy obiektami. Komórki te mogą mieć także przypisane dodatkowe atrybuty, jak np. muzyka tła.
Kolejną warstwą jest tekstura nałożona na cały teren. Wykorzystuje się ją głównie w sytuacji, kiedy obserwator znajduje się w dużej odległości, np. obserwator jest na pokładzie samolotu. Następna warstwa związana jest z pokryciem terenu. Określa ona, na jakich obszarach znajdują się jakie rodzaje podłoża. Ma to znaczenie przy przemieszczaniu się pododdziałów i przy wyświetlaniu terenu, gdyż rodzaj podłoża determinuje użycie konkretnej tekstury. Kolejną warstwą jest warstwa dróg, która podobnie jak pokrycie terenu tworzona jest na podstawie maski, najczęściej tworzonej na bazie zdjęć satelitarnych. Warstwa dróg przed
wyświetleniem na ekranie podlega jeszcze dodatkowej obróbce, zakręty są zaokrąglane, tworzone są skrzyżowania itp. Ostatnią warstwę tworzą obiekty terenowe, dla których oprócz położenia i orientacji w przestrzeni potrzebne są modele 3D. Symulator sam ostatecznie dokonuje umiejscowienia obiektu w terenie, dzięki czemu np. drzewa nie wiszą w powietrzu albo nie rosną pod ziemią (rysunek 3). Obiekty takie jak budynki mogą posiadać modele wnętrz. Dodatkowo możliwe jest definiowanie interakcji z elementami obiektów, co pozwala np. otwierać drzwi czy okna. Aktualnie VBS2 jest zdolny do obsługi terenu o wielkości 150 km x 150 km. Docelowo wielkość terenu ma przestać być ograniczona, ze względu na wprowadzany mechanizm stronicowania (multi-map). Aktual-nie głównym ograniczeniem dla wielkości terenu są zasoby komputera, na którym ma być prowadzona symulacja, oraz 32-bitowa architektura symulatora. W planie jest również wydanie wersji VBS2 w 64-bitowej architekturze. Bardzo ważnym aspektem wpływającym na wielkość terenu, jaką zdolny jest obsłużyć symulator, jest sposób umieszczenia obiektów w terenie. Umieszczenie ich na stałe w terenie zmniejszy znacznie maksymalną wielkość terenu, ponieważ symulator na starcie ładuje cały teren do pamięci, dlatego też obiekty i drogi umieszcza się w plikach skryptowych, które ładowane są dynamicznie przez symulator w razie koniecz-ności, dzięki czemu oszczędzamy zasoby komputera.
Rys. 3. Fragment widoku 3D terenu w VBS2

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 15–22 (2013)
17
4. Opis podstawowych formatów danych terenowych w kontekście ich wykorzystania w VBS2
SHP Format zapisu danych wektorowych, który został wprowadzony do użytkowania przez firmę ESRI na początku lat 90. ubiegłego wieku. Pierwotnie format zamknięty, dziś jego specyfikacja jest dostępna publicznie. Umożliwia przechowywanie kształtów, to jest: punktów, zbiorów punktów, linii, łamanych, zbiorów łamanych, wieloboków umiej-scowionych w przestrzeni, wraz z opisującymi je atrybutami. Jeden „shapefile” może przechowywać kształty tylko jednego rodzaju, podobnie wszystkie kształty w „shapefile” opisują te same atrybuty, dlatego też jeden „shapefile” przechowuje zazwyczaj dane o podobnych obiektach, np. o jeziorach, natomiast dane o sieci drogowej będą umieszczone w kolejnym „shapefile”. Pracując z wieloma „shapefile”, najczęściej każdy z nich traktuje się jako osobną warstwę na mapie (rysunek 4). Na każdy „shapefile” składają się co najmniej trzy pliki. Plik (.shp) przechowujący dane o kształtach, plik (.shx) zawierający indeks przestrzenny, którego wykorzystanie znacznie przyśpiesza proces wyszukiwania kształtów w (.shp), oraz plik (.dbf) zawierający dane o atrybutach kształtów, będący de facto bazą danych w formacie dBase IV. Format ten jest powszechnie wykorzystywany do przechowywania informacji w systemach GIS, dzięki czemu istnieje cała gama narzędzi open source i komercyjnych używających tego formatu. Dostępne są również API w wielu językach programowania (C++, C#, Java, Python) umożliwiające przygotowanie aplikacji wykorzystujących ten format.
Rys. 4. Przykładowy „plik” SHP zawierający dane na temat strumieni i rzek zobrazowany
w programie ArcCatalog
VPF VPF to format zapisu danych wektorowych powszechnie stosowany w wojskowych i publicznych systemach GIS. Został on szczegółowo opisany w dokumencie MIL-STD- -2407 wydanym przez Ministerstwo Obrony USA w 1996 roku, który jest udostępniony publicznie. Podobnie jak format SHP, VPF służy do przechowywania danych o kształtach, choć tu mówi się raczej o obiektach i klasach, umiejscowionych w przestrzeni, z tą jednak różnicą, że cała mapa zawiera się w jednym „pliku” VPF, co z kolei wymagałoby wielu „plików” SHP. Sam model terenu zastosowany w formacie VPF przypomina geodatabazę; każdy obiekt powiązany może być z kształtem, a pomiędzy obiektami mogą występować relacje. Informacje geolokacyjne mogą w ramach plików VPF być dzielone na macierze, co ma zwiększyć szybkość dostępu do danych i szybkość wyszukiwania obiektów. Bezpo-średnio z tych cech formatu wynika jego skomplikowana struktura. Dane na temat obiektów z podobnych klas przechowywane są w tych samych folderach, np. dane na temat hydrologii, na które będą składały się dane jezior, rzek, oczek wodnych itp. VPF jest formatem dużo mniej popularnym niż SHP i dużo mniej narzędzi potrafi poprawnie obsługiwać ten format (rysunek 5). Dostępne są API (Java) pozwalające wykorzystać ten format we własnych aplikacjach.
Rys. 5. Przykładowe dane hydrologiczne (rzeki i bagna) zapisane w formacie VPF,
prezentowane w narzędziu ArcMap
GDB GDB to format bazy danych geograficznych wykorzystywany przez oprogramowanie firmy ESRI. Łączy on w sobie możliwości przechowywania informacji geoprzestrzennych oraz typowo bazodanowych. Format ten został wykorzystany w trakcie przygotowania danych do VBS2, aby ułatwić pracę z wieloma plikami

J. Koszela, T. Drozdowski, M. Niedziela, H. Ostap, R. Wantoch-Rekowski, Zaawansowane metody…
18
SHP, VPF i DTED. Przy wykorzystaniu API od firmy ESRI pozwoliło toujednolicić i uprościć proponowane rozwiązanie, które korzystało jedynie z zasobów geobazy danych. Jedna geobaza danych jest katalogiem, w którym umieszczone są wszystkie jej zasoby. Format zapisu danych w GDB jest własnością firmy ESRI i nie jest udostępniony publicznie, stąd decydując się na ten format, należy korzystać z oprogramowania tej firmy bądź z API przez nią udostępnianych (C++, Java, C#, Python). Odpowiednie API można pozyskać ze strony producenta. DTED DTED to siatkowy format zapisu danych wysokościowych powszechnie stosowany w wojskowych systemach GIS. Format ten został szczegółowo opisany w dokumencie MIL-PRF-89020B wydanym przez Departament Obrony USA, który finalną postać uzyskał w 2000 roku. Podobnie jak w przypadku poprzednich formatów opracowanych przez Departament Obrony USA jego specyfikacja jest dostępna publicznie. Dane wysokościowe zapisane w tym formacie przechowywane są w postaci tablic danych wysokościowych, a podane są w metrach nad poziomem morza.
Rys. 6. Przykładowe zobrazowanie danych wysokościowych zapisanych w formacie DTED,
poziom 2
Format DTED przewiduje trzy poziomy szczegółowości: 0, 1, 2. Choć w ostatnim czasie zostały zaproponowane trzy kolejne, to nie doczekały się one standaryzacji. Tabela 1 przedstawia odległość pomiędzy punktami wysokościowymi oferowaną przez poszczególne poziomy.
Tabela 1. Gęstość punktów wysokościowych dla różnych poziomów DTED
Poziom DTED Odległość pomiędzy sąsiednimi punktami wysokościowymi
0 ~1 km 1 ~100 m 2 ~30 m 3 ~10 m 4 ~3 m 5 ~1 m
W zależności od szerokości geograficznej
odległość pomiędzy punktami wyrażona w stopniach zmienia się, i tak np. dla DTED2 w okolicach równika wynosi ona jedną sekundę kątową, a w pobliżu bieguna 6 sekund kątowych.
W zależności od poziomu struktura plików zapisu danych wysokościowych w formacie DTED różni się, jednak same dane wysokościowe zapisywane są w postaci tabel. Jedna tabela z danymi ma szerokość i wysokość jednego stopnia kątowego. Taka komórka zapisana jest w jednym pliku i może zawierać dane 3601 punktów wysokościowych, dla DTED2, a dla DTED1 1201 punktów. Dane wysokościowe punktów brzegowych każdej z komórek powtarzane są w sąsiednich komórkach. W jednej tabeli dane wysokościowe zapisane są wierszami, a wiersze ułożone są zgodnie z szerokością geograficzną im odpowiadającą, w kolejności od najmniejszej do największej.
Dokładność danych wysokościowych dla poziomu DTED2 odpowiada szczegółowości konturów na mapie w skali 1:50000 (rysunek 6), natomiast DTED1 odpowiada szczegółowością mapa w skali 1:250000.
5. Generowanie terenu
z wykorzystaniem różnych zasobów informacyjnych
Ze względu na bardzo dużą popularność symulatora VBS2 w zastosowaniach woj-skowych na całym świecie dostępne są dla niego narzędzia i środowiska służące do wspomagania wytwarzania danych terenowych, takie jak TerraTools firmy TerraSim. Są to jednak rozwiązania komercyjne i zawierają pewne ograniczenia.
Producent VBS2 udostępnia wraz z symulatorem zestaw narzędzi pomocnych przy generacji map, które z dodatkowym wspomaganiem w postaci własnego oprogramowania umożliwiają budowanie zaawansowanych map. Rysunek 7 przedstawia

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 15–22 (2013)
19
proponowany sposób przygotowania danych terenowych dla symulatora VBS2 z wykorzystaniem różnych źródeł danych mapowych oraz własnych i dostarczanych przez producenta narzędzi [7].
Rys. 7. Schemat procesu generacji danych terenowych dla symulatora VBS2
W przypadku generacji terenu dla VBS2 na
niektórych etapach istnieje potrzeba ręcznej weryfikacji. Wynika to z faktu, że teren musi być dość szczegółowo odwzorowany, a dane geograficzne często pozbawione są wielu istotnych z punktu widzenia VBS2 elementów, np. takich jak: orientacja budynków, rozkład wnętrz budynków, tekstury obiektów itp.
Na wstępie użytkownik musi zdefiniować obszar, dla jakiego generowany będzie teren. Korzystając z aplikacji wytworzonej na WAT, użytkownik na mapie zaznacza interesujący go teren, podaje również rozmiar mapy i jej poziom szczegółowości (rysunek 8).
Rys. 8. Przykładowe umiejscowienie terenu do generacji mapy dla VBS2
Aplikacja dokonuje wszystkich niezbęd-nych obliczeń oraz tworzy plik projektu terenu w formacie POSEW60 (rysunek 9) wraz z niezbędnymi plikami konfiguracyjnymi, który w efekcie końcowym jest przekształcany do formatu 8WVR używanego przez silnik gry VBS2 – Virtual Reality (rysunek 10).
Rys. 9. Diagram klas opisujący pełną strukturę pliku
w formacie POSEW60 [1]
Następnie na podstawie warstwy wysokościowej bazującej na danych w formacie DTED aplikacja tworzy mapę wysokościową i zapisuje ją bezpośrednio do pliku z terenem. Na tym etapie może zajść konieczność wykonania przez aplikację interpolacji danych wysokościowych, zwłaszcza w sytuacji kiedy dane wysokościowe będą miały zbyt małą rozdzielczość w stosunku do tej wybranej przez użytkownika. W tym momencie można zastosować interpolację bilinearną lub najbliższego sąsiada.
Rys. 10. Sposób zapisu wartości punktów wysokościowych w tablicy pliku mapy formatu
8WVR [1] W kolejnym kroku na podstawie wybranej
warstwy z danymi mapowymi, np. w formacie CADRG, generowana jest tekstura terenu, ustalenie rozmiaru odbywa się automatycznie. Tekstura w pierwszej kolejności zapisywana jest do pliku (.png), a później ładowana przez użytkownika do pliku projektu terenu za pomocą aplikacji VBS2 Visitor3. Następnie, wykorzystując dane zapisane rastrowe w formatach CADRG, MrSID, GeoTiff oraz dane wektorowe w formatach SHP i VPF, tworzony jest przez użytkownika plik maski

J. Koszela, T. Drozdowski, M. Niedziela, H. Ostap, R. Wantoch-Rekowski, Zaawansowane metody…
20
terenu (rysunek 11). Można w tym celu wykorzystać program Global Mapper, który standardowo dołączany jest do VBS2. Wraz z plikiem maski tworzony jest plik legendy oraz uzupełniane są wpisy w plikach konfiguracyjnych dotyczące terenu i jego właściwości mających wpływ na symulację, np. trudność pokonywania, zapiaszczenie, tekstura, jaka ma zostać użyta. Użytkownik musi przed przystąpieniem do tego etapu przygotować zestaw danych terenowych, które znajdą odniesienie w tworzonym pliku maski.
Rys. 11. Przykładowy plik maski terenu z zaznaczonymi rodzajami terenu i podziałem mapy na segmenty [2]
Po utworzeniu pliku maski tworzona jest
baza danych o obiektach terenowych. Zawartość bazy danych zostaje wygenerowana na podstawie danych w formatach SHP i VPF. Sama baza danych została tak zaprojektowana, aby nie było konieczności wykonywania kolejnych konwersji i jej schemat odpowiada formatowi plików (.lbt), za pomocą których obiekty będą dołączane do danych terenowych dla symulatora. Użycie tych plików skutkuje możliwością dodania do terenu dużo większej liczby obiektów, w stosunku do dodania ich bezpośrednio do danych terenowych, dzięki temu, że dane w nich zawarte będą mogły być przez VBS2 ładowane dynamicznie, kiedy będą potrzebne. Ze względu na różny zakres danych informacyjnych przechowywanych w formatach SHP, VPF i (.lbt) niezbędne jest na tym etapie uzupełnienie zawartości bazy danych. Dane geoprzestrzenne nie zawierają standardowo takich informacji jak orientacja obiektów w przestrzeni czy też ich wielkość, natomiast takie dane wymagane są przez symulator do poprawnego renderowania obiektów. W opisywanym rozwiązaniu brakujące dane generowane były losowo w oparciu o cechy charakterystyczne dla wybranego obszaru. Należy również dodać, że na tym etapie dla danych obszarowych, np. dla lasów, generowane
są pojedyncze obiekty, które losowo zapełniają wskazany obszar. Ważnym elementem na tym etapie jest również biblioteka modeli obiektów, gdyż każdemu dodawanemu obiektowi musi zostać przyporządkowany model 3D. Biblioteka obiektów musi zostać przygotowana przez użytkownika, który powinien na tym etapie uwzględnić charakter terenu, np. występowanie określonych gatunków drzew czy też typową dla rejonu zabudowę (rysunek 12).
W tym momencie niezbędna jest ingerencja użytkownika w zawartość bazy danych w celu poprawienia danych zawartych w bazie. Krok ten jest konieczny ze względu na losowanie w poprzednim kroku pewnych parametrów obiektów, co często może prowadzić do nie-właściwych rezultatów, np. budynki tworzące osiedle będą zorientowane każdy w inną stronę. Dokonanie niezbędnych modyfikacji ułatwia generowany podgląd terenu.
Rys. 12. Podgląd terenu w trakcie edycji zawartości bazy danych o obiektach terenowych [1]
Kolejny krok jest opcjonalny. Istnieje
możliwość uzupełnienia obiektów pozyskanych z plików SHP i VPF. Można w tym celu posłużyć się szeregiem programów. Jednym z nich jest program opracowany na WAT umożliwiający generowanie losowych terenów zabudowanych (rysunek 13).
Rys. 13. Przykład dodania do terenu dla VBS2 obszaru zabudowanego przy wykorzystaniu
generatora opracowanego w WAT [3]

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 15–22 (2013)
21
Po wykonaniu poprawek i uzupełnieniu zawartości bazy danych na jej podstawie generowane są pliki (.lbt).
Na tym etapie użytkownik, korzystając z programu Visitor3 (lub nowszego Visitor4), scala wszystkie elementy wytworzone w trakcie realizacji procesu. Ma w tym miejscu również możliwość dokonania niezbędnych korekt.
Ostatnim krokiem jest spakowanie dołączonym do VBS2 narzędziem plików terenowych i zapisanie ich w formacie (.pbo). 6. Wnioski W opracowaniu przedstawiono sposób przygotowania danych terenowych na potrzeby wysokorozdzielczej symulacji działań taktycz-nych realizowanych w środowisku symulatora wirtualnego VBS2. Na potrzeby tego rodzaju symulacji wymagane jest bardzo szczegółowe odwzorowanie terenu działań na podstawie map cyfrowych standardu GIS (m.in.: VPF, DTED, SHP, CADRG, MrSID, GeoTiff). Efektywność procesu przekształcania danych terenowych zapisanych w formatach standardu GIS w dużej mierze zależy od jakości, szczegółowości i poprawności tych danych. Dokładność odwzorowania dla symulacji wysokorozdzielczej jest bardzo istotna dla realizacji symulacji na poziomie taktycznym, a w szczególności dla działań asymetrycznych i w terenie zabudowanym. Przedstawione w opracowaniu rozwiązanie zostało praktycznie wykonane i zastosowane do symulacji wielorozdzielczej działań konfliktowych i kryzysowych. 7. Bibliografia [1] M. Niedziela, praca dyplomowa
pt. Mechanizm generacji danych o ukształtowaniu terenu na potrzeby symulacji działań militarnych wysokiej rozdzielczości, Warszawa, WAT, 2011.
[2] http://community.bistudio.com [3] T. Szczepański, praca dyplomowa
pt. Projekt generatora elementów infrastruktury urbanistycznej w środowisku VBS2, Warszawa, WAT, 2011.
[4] R. Antkiewicz, W. Kulas, A. Najgebauer, D. Pierzchała, J. Rulka, Z. Tarapata, R. Wantoch-Rekowski, ”Modelling and simulation of C2 processes based on cases in the operational simulation system for CAX”, 1st Military Communication and Information System Conference MCC’2006, Gdynia, 2006.
[5] R. Antkiewicz, W. Kulas, A. Najgebauer, D. Pierzchała, J. Rulka, Z. Tarapata, R. Wantoch-Rekowski, ”Some aspects of designing and using deterministic and stochastic simulators for military trainings and CAX'es”, Proceedings of the Military Communications and Information Systems Conference MCC’2008, September 2008, Cracow, Poland.
[6] R. Antkiewicz, W. Kulas, A. Najgebauer, D. Pierzchała, J. Rulka, Z. Tarapata, R. Wantoch-Rekowski, M. Chmielewski, R. Kasprzyk, J. Koszela, „Symulacyjny model działań bojowych szczebla operacyjnego i taktycznego”, w: Badania operacyjne i systemowe a zagadnienia społeczeństwa informacyjnego, bezpieczeństwa i walki, str. 253–266, IBS PAN, Warszawa, 2008.
[7] J. Koszela, M. Mańko, M. Niedziela, H. Ostap, T. Tarnawski, ”Preparation of terrain data for the needs of multi-resolution battle space simulation system”, in: Concepts and Implementations for Innovative Military Communications and Information Technologies, Warszawa, 2010.

J. Koszela, T. Drozdowski, M. Niedziela, H. Ostap, R. Wantoch-Rekowski, Zaawansowane metody…
22
Advanced methods of terrain data preparation for VBS2 simulator
J. KOSZELA, T. DROZDOWSKI, M. NIEDZIELA, H. OSTAP,
R. WANTOCH-REKOWSKI The paper contains a description of the terrain data preparation for the virtual simulator VBS2. A model of terrain use in the simulator was presented. The technology and the software used to generate terrain data with the most important properties was presented. The specification of the main data formats was presented (SHP, GDB, VPF, TDED). The article concludes with a description of the process of generation of terrain data for the selected area.
Keywords: VBS2, simulation, terrain data.

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 23−31 (2013)
23
Applying the Concept of Figural Goodness for Automatic Design of Dataset Visualization
T. RZEŹNICZAK
Institute of Computer and Information Systems Faculty of Cybernetics, Military University of Technology
Kaliskiego Str. 2, 00-908 Warsaw, Poland Many approaches to automatic design of graphical presentation are focused on creating graphical presentation for a given data type, often without considering actual instances of data. This is due to the fact that they aim to be general purpose solutions. In this study a method which draws attention to characteristics of the actual data to be presented is adopted. Knowing characteristics of data that will be shown to the observer in advance, allows much more customized approach and better performance of constructed visualization. Visualisation performance in this case is understood as an ability to identify and recognize presented objects quickly and easily. Construction of the method relies heavily on research in the area of data visualization and perceptual psychology – with special emphasis on figural goodness.
Keywords: data visualization, graphical languages, structural information theory, figural goodness. 1. Introduction Data visualization is nowadays a common way to represent and analyze information. There are many well-known benefits of data visualization, among others: human natural ability to quickly process visual patterns, large amount of information represented in a single image, understanding of complex data is assisted. All of these results in great interest in the subject, so there is nothing surprising in many works being carried out on automatic design of graphical presentations [20, 23]. Their most common goal is to build a framework which creates a presentation method for a given data type. In their assumptions the data type is unrestricted. That means these are general purpose solutions that can present any kind of information. This gives great flexibility, but on the other hand surely there must be better solutions in some cases.
In this paper the space of data types for which a presentation is constructed is narrowed, this results in the ability to use more informed design. The data considered here is a set of objects, each with limited set of attributes (more precise definition will be provided later). Other narrowing assumption is that a presentation is constructed for well-defined purpose. The goal in this case is to identify and recognize presented object among others in the set. This is a very common human task, especially for diagnostic processes, where a number of characteristics
describing an actual state of some entity exist. These characteristics enable to recognize a cause of the entity's condition. A real-world example is medical diagnosis: referring to the process of identifying a possible disease based on symptoms [1, 2]. Here, the visualized objects correspond to the condition being diagnosed and the presentation goal is to support this process.
In the next section an attempt to outline the problem of constructing visual presentation to achieve the above goal will be undertaken. But in the beginning, in order to set some theoretical background, areas of: graphical languages, Gestalt psychology and Structural Information Theory, will be introduced [9, 11, 20, 21, 23, 27] . 2. Graphical languages A graphical language can be considered as a description of how a graphic corresponds to represented information. According to pioneers in the area of automatic design of graphical presentations, graphical languages are similar to other formal languages through defining precise semantic and syntactic of constructed sentences [20]. Therefore, presentations can be seen as sentences in a graphical language. In context of an input data set, the main characteristics of a graphical language are its: expressiveness and effectiveness.

24
The exspecified A graphicacriteria whethat expressdata. The sentences mare not cexpressive wand these fa
The complicatedon many interpretatioor any othperception. on automataccuracy ostudy on thperceptual presentationa graphicalpresentationobject, its an exampperception ithe other, comparing graphical Mackinaly perceptual type of graincludes qutypes [7, 20
Tab. 1. Mefficiency −
QuantitativPosition Length Angle
Slope Area (Size)Volume Intensity/Va
Colour (saturation)Colour (hueTexture ConnectionContainmenShape
Lookin
given set o
T. Rzeźnicz
xpressivenesfor each
al language en it is possis all the facts
issue here may introduccorrect. Thewhen it repr
acts only. effectivenes
d to evaluadifferent faon, its speedher characteFor example
ting presentf interpretat
he fact that task when
n. The taskl technique n. Determinin
length, colle of suchis equipped fMackinaly
perceptual tlanguages. prepared atasks’ effici
aphical codinuantitative, n0, 25].
Mackinlay’s ran− from the mo
ve OrdinaPositionIntensitColour (saturatColour
) TextureConnec
alue Contain
) Length
e) Angle Slope
n Area (Snt Volume
Shape
ng for optimof data, it
zak, Applying
s criteria cagraphical
satisfies exible to geners represented
is that thce additionalerefore, a resents all th
ss criteria ate, since
actors, like d, presentatioeristic relatee, Mackinalyation designtion [20]. Ha person hainterpreting
k strongly used to c
ng a positionlor, size, eh task. Sifor some task
measured ask required
For thia ranking (iency depenng. Mackinl
nominal and
nking of percest to the least
al Non Poty/Value Co
tion) Te
(hue) Coe Coction Intnment Co
(sah Sh
LeAn
Size) Sloe Ar
Vo
mal languageis necessary
g the Concept
an be clearlyl languagexpressivenesrate sentenced by the inpuhe generatedl facts whichlanguage i
he input fact
is morit can basaccuracy o
on simplicityed to humany in his workn focuses onHe based hias to perform
a graphicadepends on
construct thn of graphicaetc., may bince humanks better thaneffectivenes
d by differenis purposeTable 1) o
nding on thlay’s rankingordinal dat
eptual tasks efficient [20]
ominal osition olour (hue) exture
onnection ontainment tensity/Valueolour aturation) hape
ength ngle ope rea (Size) olume
e to represeny to identify
of Figural Go
y e. ss es ut d h is ts
e e
of y n k n is m al n e
al e n n
ss nt e, of e g a
nt fy
a spaMackindefinedchart, shape, by theipositioencodelanguainformby Beprimitipossiblintroduconsistoperatolangua
D
algebrasolutioprimiticonstruapproadesign languavisual optimacharactpercepPinkerLohse’graphsassumpinterprhumanand su
oodness for Au
ace of posnaly limitedd primitive ltree, verticaetc. The prim
ir encoding ton languages informatioages (color,
mation using rtin [4, 5]. ive languagele presentauced compots of primitivors which
ages based on
Fig. 1. Modelund
espite the a extends
on, it is still live techniquucted by Micach to the top
[23]. Deepages design
perception al presentatteristic of tion model ’s theory o’s model of [17, 18, 22ption that retation, taken perceptionubsequently
utomatic Desi
ssible grapd the space languages likal/horizontal mitive langutechniques, fge (vertical/on by its po size, shapsix retinal pSince the u
e may be notations’ ne
osition algebve languagesallow prod
n primitive o
l of graphical derstanding [2
fact that, capabilities
limited becauues. First-prichael Shiff, rpic of automp decomposispace and l
process ftion method
first-principsimilar to thof graph unf extracting ]. First-princtwo steps:
e place indepn decodes g
interpretati
ign…
phical languto a set of ke: line charaxis, color,
ages are clasfor instance: /horizontal
osition, retinpe, etc.) eproperties deusage of a t enough for eeds, Mackbra. The als and compo
ducing alternnes.
presentation 23]
the compoof Mackin
use of small inciple framerepresents an
mating presenition of grapleveraging hfor selectiod is the ple. Schiff hose presentnderstandinginformation ciple bases o
perceptionpendently. F
given presenion of perc
uages. well-
rt, bar , size, ssified single axis)
al list ncode efined single many
kinaly lgebra osition native
osition naly’s set of ework nother ntation phical
human on of
main used
ted by g and
from on the n and Firstly, ntation ceived

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 23−31 (2013)
25
information occurs. The presentation can be seen as a graphical description composed of graphical objects which are identified by perception and based on it a perceptual description is built. The perceptual description is then interpreted and transformed to a cognitive level. Cognitive description is a mental representation of information incorporated in a graphical presentation. The basic model of perceptual processing and information extraction is shown in Figure 1.
Coming back to the size of design space, in Schiff’s approach, graphical description is more fine-grained than Mackinaly’s set of primitive languages. Graphical objects that make up the graphical description are instances of graphical primitives. Possible primitives can be: lines, arrows, circles, rectangles. Each primitive has its fixed set of parameters, like: color, size, position, which altogether give large design space. To cope with this and handle construction of graphical language, Schiff defines two types of principles: logical principles and psychological principles [23]. Logical principles are a kind of filters which determine if a language is able to represent input data. Psychological principles perform further selection based on how suitable the language is, considering people accuracy and speed in correct understanding of encoding convention (encoding convention is elaborated in next sections). This is necessary since first-principle may have to deal with previously unknown graphical languages, contrary to Mackinaly’s approach [20].
Psychological principles are subsequently divided into interpretive principles and perceptual principles. Interpretive principles are most difficult to specify objectively, because they describe characteristics that make a presentation easy to understand without any confusion. On the other hand, the perceptual principles determine how effective a graphical language is for a given data, where effectiveness is measured by speed and accuracy of perceptual distinction made by observer of a graphical presentation. Comparing to interpretive principles, this area is far more explored by researches and has better theoretical foundations.
Summarizing, a set of principles is used for the purpose of filtering and selecting of an optimal graphical language for input data type. The finally selected language in terms of first-principle approach is composed of: • a set of graphical primitives that will be
used in the presentation
• a specification of correspondence between domains of each data tuple and some properties of the graphical primitives
• a specification of relationship between graphical primitives required to encode data relation, when multiple primitives encode single data relation.
3. Selecting encoding convention Now, let's focus on how to build a graphical language and eventually transform information into its graphical representation. As mentioned earlier, a graphical presentation can be described at several levels. The method of transition from one level to another is called encoding convention [23] – starting from the cognitive description, through the perceptual description down to the graphical description. Some examples of entities used at different levels are presented in Tab. 2. It is evident that encoding convention must specify a systematic method of mapping between subsequent description levels for a certain type of data set. Selected method should allow constructing a graphical presentation for any data set instance of given type. Automating the selection process is a critical area for the domain of automatic presentation design. In this article the area will be narrowed, so the encoding convention is partially predefined in a manual process, at the same time the focus is aimed at particular data type and detailed characteristics of the selected encoding convention.
Tab. 2. Examples of entities for different levels of description [23]
Level Entitites/Components and examples
Cognitive objects/tuples/relations (e.g. <attrib1, attrib2, ...>) domains (set of possible attributes)
Perceptual Perceptual objects (e.g. circle, rectangle) Properties (e.g. size, postion)
Graphical Graphic objects (e.g. circle, point) Parameters (e.g. x, y, radius)
The task of creating graphical
representation is naturally divided into two subtasks which rely on the introduced description levels. The first one is to transform from the given data set (which is actually a cognitive description) to perceptual model. The main issue here is to choose data representation which allows an observer to note

26
all semanta way, thatsecond subperceptual dgraphical properties, able to extrperceptual subtasks wrepresentati
Beforeconvention,which will graphical pras a set ofattributes wdomain. Thnumber of explicitly dethe data sinstance of modelled apossible dox∈ O is dethe presentidentify ininformationwords, ena graphicalof each obje
It musconvention data type (adata) – norepresentatiit can be dhuman perctreated difprocesses foelaborated f
On thproposed enas follows: • cogniti
O, a seach ob
• perceptobjects
• mappinlevel –x is repall poiconneccreates
• graphicof n edifferen
T. Rzeźnicz
tically relevt informatiotask is to cdescription sobjects wso as to ens
ract certain prelations
were called ion and layo
e explaining it is necessa
be exploreresentation. f objects; ea
where all attrhe domain tattributes foefined but deset. Followif informationas a set of main attribufined as x⊆ tation is to ndividual o
n about its ncoding col representaect from the st be noted,
is being prand even for
ot for any dion stage candone manuaceptual capabfferently an
for solving thfurther in the
he basis of ncoding conv
ive level desset of possibbject x∈ O istual level ds are: points ang between
– each attribupresented by ints that bected by lines a closed polcal level desqual cells, wnt attributes
zak, Applying
vant attributn can be ex
consider howhould be insith their sure that theperceptual p
effectively.by Shiff
ut. g a proposeary to introdued and the The data typach object hributes belontype is nomor particular epends on thing this den to be preseobjects O a
utes A, whereA. The maienable the
object x characteristi
onvention mation and dset O. , that selectrepared for r a particuladata type, tn be construcally, taking bilities. The nd engageshe problem, e article.
earlier defvention can
cription – a ble domain s defined as xdescription and lines cognitive an
ute of the coga single poin
elong to ones, so the wlygon cription – a where n is in the set
g the Concept
tes in suchxtracted. Thw the chosenstantiated into
layout ande recipient iroperties and. Describedrespectively
ed encodinguce data typgoal of th
pe is definedhas a set o
ng to a singlminal and th
object is nohe instance oefinition, thented can band a set oe each objecin purpose o
observer toand extracics. In othemust allow
differentiation
ted encodingone specifi
ar instance otherefore thcted once andinto accounlayout task is automatedwhat will b
finitions, thbe described
set of objectattributes A
x⊆ A – perceptua
nd perceptuagnitive objecnt on a planee object arwhole objec
point on grida number oA. Each cel
of Figural Go
h e n o d is d d
y:
g e e d
of e e
ot of e e
of ct of o ct er w n
g c
of e d
nt is d e
e d
ts A,
al
al ct e, e
ct
d of ll
rebe
• mlevrelinbe
Exampconvenabove is layogrid ineffectivby an o
Fig
Th
in this behindleast athe dat
Finominaonly nand noThe onvalues values.visualiare har
Seof percnoticedobject includispace visualiin relabasis,
oodness for Au
epresents a die placed only
mapping betwvel – each p
epresented byne is represetween dots.ple presentantion can bedefinition, t
out – how to n such a manvely extracteobserver.
g. 2. Example pproposed
he layout taarticle. Now
d this encoda couple of rta type charairst of all, al attributesnamed valueo arithmetic nly thing tha
is comparin. This impliezation such
rd to apply. econdly, looceptual tasksd that determ
is most effing nominal
is the mzation. Spac
ation to otheon which o
utomatic Desi
ifferent attriby inside a celween perceptpoint of the py a single dosented by s
ation usinge found in Fthe key prob
place pointnner that coged, identified
presentation –
d encoding con
ask will bew I will focuding convenreasons whicteristics.
objects a, which mes. There is operations
at can be dong them wies that standas line chart
oking at Maefficiency (T
mining a posficient for al. It is clearmost signife is treated i
er image attrother elemen
ign…
bute and a doll tual and grapperceptual let on the grid
single line d
g this encFigure 2. H
blem to solves and lines ognitive objecd and remem
– generated winvention
e elaboratedus on the ra
ntion. There ch originate
are describeans that theno defined are possibleone over noith other nodard techniquts, bar chart
ackinlay’s raTable 1), it csition of grapall the data r, that the uficant aspecin a particulaributes – it nts are distri
ot can
phical evel is d, each drawn
coding Having e here on the cts are
mbered
ith
later ational
is at from
ed by ey are
order e [25]. ominal ominal ues of s, etc.
anking can be phical types
use of ct of ar way is the ibuted

[6]. Twith axis. by rethe aarbitran obto be
Tnegleintrodpropeprobafact whichfacts As this to of objof shelabo 4. F
S A spestructGestatend [27]. formipercedots just co-woperceAnothconceon thseemcalledelemebad fof aa coFor sonly
Tthe ecorreand h[8]. rememfigure
NdetermUnfo
BIUL
The empty spa metric struFor the nom
egions divideabove argumrary locationbject, as it iwell justifie
There is oneected. Such duction of sherties of aably the mosthat it is thh allows toabout the o
he purpose oidentify dep
bject's figure hape on visuaorated further
From figuStructural
ecial sensitivtures was fialt psycholoto organizeOnly glob
ing an imageeption. That outlining a a set of doorkers form
eptual organiher achieveept of figurahe observatio
m to be simd good figents are comfigures. The an object omposition ome shapes degenerate itThe interest
efficiency oflation betwe
human opinioGarner fo
mber, descres much bettNow let’s fomine the rtunately, g
LETYN INST
pace of an imucture that c
minal data typed into subrements, lever
n in space to s proposed i
ed. e more argum
encoding hape percept
a graphical st important.he most inf receive a object than of presentatiopicted objectis strongly leal perceptionr in the next
ural goodnl Informat
vity of humafirst noticed ogy. They cle visual eleal relation, e, determineis why whenrectangle, w
ots. Max Wmulated prinization calledement of tal goodness [on that som
mpler and begures, wheremplex and pfigural goocan be wof regularitsuch as a cirts goodness in good figu
f processing.een performaon on the gooound evideribe, matchter than bad oocus on the
goodness gestalt psyc
TYTUTU SYS
mage is a cocan be descripe axis are cegions. Consraging the exhibit attribin this study
ment that canconvention
tion. From aobject, sh
. This is dueformative prgreater numanything elson specified t, taking advegitimate. Inn of figures section.
ness to tion Theor
an vision to by the auth
laimed that ements into
between eles the key asn looking at we see a fig
Wertheimer anciples expd gestalt lawtheir work [14, 21]. It i
me sets of eletter organizeas other spoorly organdness charac
well describty and simrcle, any chan[21].
ures is motiv. There is aance of somodness of theence that h and learnones. method of
of a chologists d
STEMÓW INF
ontainer ibed by covered sidering use of
butes of , seems
nnot be allows
all other hape is e to the roperty,
mber of se [21]. earlier,
vantage nfluence
will be
ry
’good’ hors of people groups
lements spect of a set of
gure not and his plaining ws [27].
is the is based lements zed, so sets of nized – cteristic bed as
mplicity. nge can
vated by a strong me tasks
e figure people
n good
how to figure.
did not
dwecs
nmamri
idbRtrrridaFastftaTaFte
pa
FORMATYC
define any owould be toexample the complexity. sides, figure[21]. It appeanot an adeqmust dependassembled tmain assumprelation of thimportant.
Fig. 3. A) inc
B) Exampgoodness, e
There ainto accountdetermining by WendellReflection transformatiorotations (0,reflections right-diagonis inverselydifferent figuall transforFor instancea square givsquare. At thtrapezoid profigure. This the gestalt an objectiveThe only approach is For varioustransformatioequally ’goo
Other tprevious issuanother ma
CZNYCH 11 2
objective me analyze a snumber of sBut even f
e’s complexiars that the nquate measud on the wogether. Whption of Geshe perceived
Example on hcreases perceivple on how reeven for the sa
are at least twt the whole
complexityl Garner [
Subset thons applica, 90, 180, 2(horizontal, al – axes). In
y proportionures generatrmations toe, applying ves in all ehe same timeoduces eightsimple experassumptions
ely simpler problem
that not all s figures thons may be
od’ [21]. theories whiue also existajor gestalt
23−31 (2013)
easure. A simstructure of sides increasfor the sameity can diffenumber of coure and the
way the comhich comes stalt psycholod components
how the numbved complexi
egularity affecame number o
wo approachstructure of
y. First was [8]. His Roheory def
able to a f270 – degree
vertical, len this approanal to the ted by the apo the origi
the transforeight versione, applying it different variment is cons, because
figure thenwith transcases can b
he number equal, but t
ich deal wet. They are dt principle
27
mple methoda figure, fores perceived
e number ofer (Figure 3)omponents is
complexitymponents are
back to theogy – globals is the most
er of sides ty; ts figural
of sides [21]
hes that takef a figure in
formulatedotation andfines eightfigure: foures) and foureft-diagonal,
ach goodnessnumber of
pplication ofinal figure.rmations onns the sameit to randomariants of thensistent witha square isn trapezoid.sformationale explained.of differentthey are not
ell with thederived from
formulated
7
d r d f ) s y e e l t
e n d d t r r , s f f . n e
m e h s . l . t t
e m d

28
by Koffka indicates tsimplicity. of a shape iof that shapunderstand does not speof the shapmethod wInformation
Fig. 4. Praghave m
is preferre
Attneav
visual systleveraging repetition [3but the oneencoding, bbits of infora first objecthe code shoLeeuwenberTheory (Sencoding mgeneralized the process 1. 2D vis
sequenonly ris unthe seq
2. The semeans regularsubseq
3. The seusing cLoad, discuss
T. Rzeźnicz
– Law of Pthat human Therefore, a
is reflected inpe. The examthis dependecify how tope. First ste
were made n Theory [24]
gnanz law vismany interpretaed. In this case
probable t
ve and McAtems encodregularities
3, 14]. Manye actually pebecause eacrmation needctive measurould look likrg introduce
SIT) [16]. model started
to 2D pattis composed
sual pattern nce of symbrestriction inambiguouslquence of symequence of
of encodinrities am
quences of syelection of complexity mwhich mus
sed earlier La
zak, Applying
Pragnanz [1perception
a preferred in the simplesmple in Figudency. The Po determine teps towards
thanks to].
ualization, onations, but thee interpretatiothan A [13]
Alister noticee shapes o
such as: sy perceptionserceived hasch regularityded for the core of simplicke was not sped Structural
Formalizatid from 1D aterns. Accord of three step
is representols (e.g. chais that the ly reprodumbols. symbols is
ng rules, whmong symymbols.
simplest cometric calledst be in linaw of Praegn
g the Concept
15]. The lawn is led byinterpretationst description
ure 4 helps toPragnanz lawthe simplicitys finding tho Shannon’
ne pattern can e simplest on B is more
d that humanoptimally bysymmetry os are possibles the shortesy means lesode. This wacity. But howpecified, until Informationion of SITand then warding to SITps [12, 13]:ted by a 1Daracters), th
2D patternucible from
encoded byhich describmbols and
ode is madd Informationne with thnanz.
of Figural Go
w y n n o w y e s
n y
or e, st ss as w il n T as T,
D e n
m
y e d
e n e
Rules
Iteratio
Symm
Alterna
The envisual regularmajor regularbasicalrationanamelyrepreseS-form(Table
Apsequencombinend copossiblinformmetric article the enapproxapproxcodes:• ab• ab• abSummaand ggoodnediffere 5. SI SIT dotransfosymbobe a convera figursides lecode. EFigurecodingload =versiontrapezo
oodness for Au
Tab. 3. Cod
Symbo
on aaa...a
etry abcdcb
ation abacadbacada
ncoding ruleregularities
rities, whichso calle
rities. Thelly cover all al is beyondy: iteration, enting them
m, A-form, re3). pplying the
nce and alnatorial explodes. To seale coding, oation load mis a separatenumber o
ncoded sequeximation. Fximated info
babab ↔ 3bcdcba ↔ bacad ↔ <arizing, SIT
gives the aess. Hence,nt figures is
IT and La
oes not proorm 2D pattels. The natureversible p
rsion methore contour anength and anExample for5, represent
g, could tak8). After ap
n, taking intoid is: S[(a)(e
utomatic Desi
ding rules exam
ol sequ. Co
aa m*
ba S[(
d a
<(a<(b
s are strongls. SIT deveh then was nd transpar
e holograpthe other reg
d the scopesymmetry,
m are respeferred toget
rules to thell the sublosion of thearch this spone needs mmetric. Sincee issue, for tof symbols ence can beor example
ormation lo
*((a)(b)) : inS[(a)(b)(c),(
<(a)>/<(b)(c)passes from ability to , comparinalso feasible
ayout Task
vide a specern/figure intural assumptiprocess. Thod is basend coding itngles betweer a trapezoidting it as a coke a form opplying ISAto account se),(b)]S[(d),(
ign…
mples [13]
ode
*(a)
(a)(b)(c),(d)]
a)>/<(b)(c)(d)b)(c)(d)>/<(a)
ly connectedeloped a snarrowed to rent hologrphic regulagularities (bre of this aralternation.
pectively: I-ther as ISA-
e original sybsequences e possible mipace and evmentioned ee SIT compthe purpose o
that remae a good ene, below ioad of follo
nf. load = 2 (d)] : inf. loa)(d)> : inf. lotheory to prcalculate fi
ng efficience.
k
cific way hoto 1D sequenion is that it
he most comed on follot as a sequenen them – cod is presentode, using coof aebeadcd-form, its sh
symmetries o(c)](inf. load
)> )>
d with set of
three raphic arities roader rticle), Rules -form, -forms
ymbol gives
inimal aluate
earlier, plexity of this
ain in nough is an owing
d = 4 oad =3 ractice figural cy of
ow to nce of t must mmon owing nce of ontour ed on ontour d (inf. horten of the
d = 5).

Figan
an
Ulangudescrthe fifindinattribobjeceffectremem
Ngrid previinformgrid meascalcuobjecload arran(the to tha proa goo
Aan inis notproblcompoptimvery probl ProbAs discuvisuaconnealtogany pbe obconfiattribvalid not
BIUL
g. 5. The figurend angels. 1D
nd applying IS
Using the uages and firibe the layofigural goodnng a method
butes A in scts O form gtive extrmbering themNow, let’s arrangementous sectionsmation load arrangemen
ure for the ulating and acts from O.
is then a ngements. Th
grid optimahe load). Gomise’ of eod figure. Although ntroduction t a subject helems which plete the lamal grid, com
crucial polems:
blem I – figuit was m
ussion on alized objectsecting themether they fo
point can be bserved, the nguration dep
butes and it isconfiguratio
allowed. Se
LETYN INST
e of trapezoidD sequence couSA-forms: S[(a
discussion
figural goodnout task. Reness nomenc
d of how to such a way good figuresracting, m. consider hot. Using mes, it is possib
of a given nt. An aggrgiven grid c
adding inform. The aggreselection cr
he lower loality is inve
Grid selectedach object
this articnature and ere, I will try
must be sayout task. mputational coint, there
ure constructmentioned e
encoding s are represe
m lines in orm a closed connected tonumber of ppends on thes of order k!.ons since inelection crit
TYTUTU SYS
d with labelleduld be: aebeada)(e),(b)]S[(d)
n on grness, let’s mecalling the clature, it coarrange the that all vis
s. So that it identifying
ow to find oethods preseble to calculobject for a
regated comcan be obtaimation loadsegated inforriteria of th
oad the bettersely propod this way visualisation
cle has detailed alg
y to show thesolved in o
Looking fcomplexity b
are three
ting arlier durin
conventionented by poisuch a wapolygon. In
o any line. Apossible conne number of Not all of th
ntersecting literia among
STEMÓW INF
d sides dcd, ),(c)]
raphical move to
task in oncerns grid of
sualized allows
and
optimal nted in late the a single
mplexity ined by
ds of all rmation he grid ter grid ortional
’holds n being
rather gorithm e list of rder to for the become
major
ng the n, the ints and ay that theory,
As it can nections f object hem are ines are g valid
pc
a
PWpfBa
2
3
TeihNissafsp
PPsicvnacocgp
pgimHaa
pmcO
FORMATYC
polygons arcondition, p[13, 26]. Tha naive algor
Problem II –When a figproduce thefind the miBasic approas follows: 1. Searchin
some sy2. Replaci
related I3. Continu
sequencThe search exponentiallyinitial code. has two sourN, the numbis N*(N+1)/space, but subsequenceactual interefinding ISsubsequenceproblem O(2
Problem IIIProblem I asingle figureis to checkcalculate thavalid grid arnumber of a square gridcolumns giveobviously incombinationgrids will problem has
Consideproblems, Pgraph theoryin a completmay be apHamiltoniana well-knowalgorithms th
Regardiproposed traminimal SITconcept andO(N3+logN) [1
CZNYCH 11 2
re based oroposed by he computrithm solving
– minimal cgure is con
contour conimal code oach to th
ng for ISA-fymbol subseqng the founISA-forms; uing searchce.
space for y with the nuThe expon
rces [10, 12,ber of differe/2, which g
all possies which mest. The seSA-forms e, which i2NlogN).
I – grid selecand Problem e and single k all possiblat for n attrrrangements rows and c
d). Manipulaes completelncreases the ns. For simpli
be considecomplexity
ering potentiProblem I cay. Assuming te graph, a sepproximated
n cycle in suwn problem fhat can be aping Problemansparallel pT code searcd achieves ac10].
23−31 (2013)
on spatially Tuijl and Lational comg this task is
code nstructed it de. The nexfor this co
is problem
form which cquences; nded subseq
hing in th
minimal cumber of symential scale 13]. In a coent length su
gives polynoible combi
make O(2N) econd probl
covering is a super
ction II are only grid, but th
le grids. It ributes in thexist (assum
columns in ating the ratily new arrang
number of icity reasons
ered, even of O(n!).
ial solutions an be repres
that points earch for a vad by findinuch a graph [for which mapplied exist. m II, P. vanprocessing ach that uses cceptable co
29
contiguousLeeuwenbergmplexity of
O(k!).
is easy toxt step is toontour code.
may look
can describe
quence with
he resulting
code growsmbols in theof this task
ode of lengthubsequences
omial searchinations ofare in our
em here isfor each
-exponential
consideringhe main task
is easy tohe set A, n!ming a fixed
the grid –o of rows togements andall possible
s only squarethough the
to the abovesented usingare vertexesalid polygonng minimal[13]. This isany heuristic
n der Helmapproach for
hyperstringomplexity of
9
s g f
o o . k
e
h
g
s e k h s h f r s h l
g k o
d – o d e e e
e g s n l s c
m r g f

T. Rzeźniczak, Applying the Concept of Figural Goodness for Automatic Design…
30
The biggest issue in solving layout task comes from Problem III – grid selection. It is evident from the above discussion, that using naive approaches and checking all potential grids for a large set of attributes A is not possible in finite time (e.g. 100 attributes gives around 10157 different grids). This problem does has not had yet good solution and will be a major topic of further research. 6. Conclusions This article aims to outline the problem of data visualization, where a method of visualization is built for a specific data, not only for a data type but also for an instance of data. This allows to use their characteristics and build otherwise inaccessible solutions. At this stage the use of the data instance is not fully leveraged. It is implicitly covered in the whole presented method, which expresses in the fact that the data set is known from the beginning, but still it is not used directly in a specific algorithm. For example any particular characteristic of an object o from O is never considered. This leaves room which can be explored in grid selection algorithm. Since the naive solution to this problem is unacceptable, the work must be focused on other methods. Heuristic methods seem to be a good candidate to make use of the data characteristics. For example dividing the grid selection problem into smaller subproblems is one of a potentially possible approach. The division may be set based on occurrence frequency of particular attributes in visualized objects, taking into account similar groups of attributes shared by different objects or any other pattern appearing in data. Knowing such patterns allows to extract them and for instance to prepare fixed solution (fixed good figure) for the subset of attributes and objects. Then, it can be used as a constant element of the grid, which reduces the number of possible grid arrangements. This and other heuristics will be the subject of further research. 7. Bibliography [1] A. Ameljańczyk, Multiple Optimization,
Warszawa, 1986. [2] A. Ameljańczyk, ”Properties of the
Algorithm for Determining an Initial Medical Diagnosis Based on a Two-Criteria Similarity Model”, Biuletyn Instytutu Systemów Informatycznych, Nr 8, 9–16, (2011).
[3] F. Attneave, ”Some informational aspects of visual perception”, Psychological Review, 61, 183–193 (1954).
[4] J. Bertin, Graphics and Graphic Information-Processing, Walter de Gruyter, Berlin, 1981.
[5] J. Bertin, Semiology of Graphics: Diagrams, Networks, Maps, The University of Wisconsin Press, Wisconsin, 1983.
[6] S. Card, J. Mackinlay, B. Shneiderman, Readings in information visualization: using vision to think, Morgan Kaufmann Publishers, San Francisco, 1999.
[7] W. Cleveland, R. McGill, ”Graphical Perception: Theory, Experimentation, and Application to the Development of Graphical Methods”, Journal of the American Statistical Association, 79, (1984).
[8] W. Garner, The processing of information and structure, MD: Lawrence Erlbaum Associates, 1974.
[9] E. Goldmeier, ”Similarity in Visually Perceived Forms”, International Universities Press, Inc., 1972.
[10] P. van der Helm, ”Transparallel processing by hyperstrings”, Proceedings of the National Academy of Sciences USA, 101 (30), 10862–10867, 2004.
[11] P. van der Helm, E. Leeuwenberg, ”Accessibility: A Criterion for Regularity and Hierarchy in Visual Pattern Codes”, Journal of Mathematical Psychology, 35, 151–213 (1991).
[12] P. van der Helm, E. Leeuwenberg, ”Avoiding Explosive Search in Automatic Selection of Simplest Pattern Codes”, Pattern Recognition, Vol. 19, No. 2, 181–191 (1986).
[13] P. van der Helm, E. Leeuwenberg, ”Goodness of Visual Regularities: A Nontransformational Approach”, Psychological Review, Vol. 103, No. 3, 429–456 (1996).
[14] J. Hochberg, E. McAlister, ”A quantitative approach to figural goodness”, Journal of Experimental Psychology, 46, 361–364 (1953).
[15] K. Koffka, Principles of Gestalt psychology, New York: Harcourt, Brace, 1935.
[16] E. Leeuwenberg, ”A perceptual coding language for visual and auditory patterns”, American Journal of Psychology, 84(3), 307–349 (1971).
[17] G. Lohse, A cognitive model for the perception and understanding of graphs,

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 23−31 (2013)
31
The University of Michigan dissertation, 1991.
[18] G. Lohse, ”A cognitive model for the perception and understanding of graphs”, Human-Computer Interaction, 8(4), 353–388 (1993).
[19] A. MacEachren, How Maps Work, The Guilford Press, New York, 1995.
[20] J. Mackinlay, ”Automating the Design of Graphical Presentations of Relational Information”, ACM Transactions on Graphics , Vol. 5, Issue 2 (1986).
[21] S. Palmer, Vision Science: Photons to Phenomenology, MIT Press, 1999.
[22] S. Pinker, ”A theory of graph comprehension”, Artificial intelligence and the future of testing, Lawrence Erlbaum Associates, 1990.
[23] M. Schiff, Designing graphic presentations from first principles, Doctoral Dissertation, University of California, Berkeley, 1998.
[24] C. Shannon, W. Weaver, The mathematical theory of communication, Urbana: University of Illinois Press, 1949.
[25] S. Stevens, ”On the Theory of Scales of Measurement”. Science, 103 (2684), 677–680 (1946).
[26] H. van Tuijl, E. Leeuwenberg, ”Perceptual interpretation of complex line patterns”. Journal of Experimental Psychology: Human Perception and Performance, 6, 197–221 (1980).
[27] M. Wertheimer, ”Gestalt theory”, A sourcebook of Gestalt psychology, 1–11, New York: The Humanities Press, 1924/1950.
Zastosowanie koncepcji „figural goodness”
do automatycznego projektowania wizualizacji zbioru danych
T. RZEŹNICZAK Wiele rozwiązań z zakresu automatyzacji konstruowania prezentacji graficznych koncentruje się na konstruowaniu prezentacji graficznych dla wybranego typu danych, najczęściej bez uwzględniania konkretnej instancji danych w procesie przygotowania metody prezentacji. Wynika to z faktu, że podejścia te starają się być rozwiązaniami uniwersalnymi. W pracy zaproponowana jest metoda, która zwraca uwagę na cechy danych, które faktycznie będą przedstawiane. Znając charakterystykę danych, do zaprezentowania możliwe jest znacznie lepsze dostosowanie podejścia i poprawa wydajności zbudowanej wizualizacji. Wydajność wizualizacji w tym przypadku jest rozumiana jako zdolność obserwatora do odnajdywania i rozpoznawania prezentowanych obiektów w szybki i łatwy sposób. Budowa metody opiera się głównie na badaniach w obszarze wizualizacji danych i psychologii percepcji – ze szczególnym naciskiem na figural goodness.
Słowa kluczowe: wizualizacja danych, języki graficzne, structural information theory, figural goodness.


BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 33−39 (2013)
33
Sztuczne sieci neuronowe o radialnych funkcjach bazowych do śledzenia obiektów w obrazach wideo
J. SZYMONIK
Instytut Systemów Informatycznych, Wydział Cybernetyki Wojskowa Akademia Techniczna
ul. Gen. S. Kaliskiego 2, 00-908 Warszawa W pracy przedstawiono opis sztucznej sieci neuronowej do lokalizacji i śledzenia obiektu w obrazach wideoz wykorzystaniem środowiska MATLAB oraz wyniki badań odporności algorytmu na mogące wystąpić zakłócenia. W artykule zaprezentowana została architektura sztucznej sieci neuronowej o radialnych funkcjach bazowych. Pokazany został zarówno algorytm śledzenia celu z wykorzystaniem powyższej architektury sieci, jak i metoda modelowania oraz lokalizacji celu. W podsumowaniu przedstawione zostały wyniki przeprowadzonych symulacji algorytmów śledzących opartych na sztucznych sieciach neuronowych.
Słowa kluczowe: śledzenie obiektów, sztuczne sieci neuronowe, radialne funkcje bazowe. 1. Wprowadzenie Maszyny widzące i analizujące swoje otoczenie już istnieją, a ich ciągły rozwój jest przy-spieszany poprzez postęp zarówno w dziedzinie mikroelektroniki, jak i w algorytmach analizy sygnału wideo. Proces estymacji pozycji interesującego nas obiektu w czasie, w sekwen-cji obrazów nazywamy śledzeniem obiektów. Jedną z fundamentalnych cech urządzeń przeznaczonych do obserwowania, rozumienia oraz reagowania na otaczające środowisko jest ich zdolność do detekcji oraz wcześniej wspomnianego śledzenia interesujących nas obiektów.
Główne problemy, które należy wziąć pod uwagę podczas projektowania trakera, są związane z podobieństwem wyglądu celu i innych obiektów otoczenia. Pozostałe przeszkody stojące na drodze efektywnego procesu śledzenia związane są ze zmianami wyglądu samego celu powodowanymi m.in.: • zmianami pozycji • światłem z otoczenia • przesłonięciem celu (częściowym lub
całościowym) • szumem wprowadzanym przez urządzenia
pomiarowe, sensory [5]. Wśród wielu podejść naukowych do
problemu śledzenia, detekcji i rozpoznawania obiektów, ważną rolę odgrywają wielo-kryterialne algorytmy rozpoznawania wzorców [2], [3] bazujące na teorii podobieństwa [4], dynamiczne sieci Bayesa [7] oraz algorytmy oparte na sztucznych sieciach neuronowych [6].
Niniejszy artykuł jest poświęcony właśnie metodzie śledzenia adaptacyjnego online wykorzystującego sieci neuronowe o radialnych funkcjach bazowych [12].
2. Wybór architektury sztucznej sieci neuronowej
W przypadku algorytmów bazujących na sztucznych sieciach neuronowych, metodologia iteracyjnego szukania jest szeroko stosowana w celu aktualizacji parametrów sieci. Z tego powodu proces uczenia sieci jest bardzo intensywny obliczeniowo i często trenowanie sieci może zająć od kilku do kilkunastu godzin [1]. Kolejnym problemem przy korzystaniu z sieci neuronowych z propagacją wsteczną jest możliwość jej przetrenowania, co do-prowadzi do utraty przez nią możliwości do generalizowania, czyli dostosowywania się sieci do nowych sytuacji. Co więcej algorytmy bazujące na uczeniu są zwykle projektowane do śledzenia wybranych obiektów, co wymaga każdorazowo długotrwałego procesu uczenia sieci offline.
Ze względu na powyższe czynniki w kolejnym punkcie zaprezentowana zostanie uniwersalna metoda śledzenia obiektów opierająca się na sieciach neuronowych o radial-nych funkcjach bazowych i wykorzystująca uczenie sieci online.
Algorytm ten uwzględniać będzie również adaptację mogącego się zmieniać modelu obiektu wraz z każdym nowym obrazem sekwencji wideo.

J. Szymonik, Sztuczne sieci neuronowe o radialnych funkcjach bazowych…
34
3. Radialne funkcje bazowe Specjalną odmianę sztucznych sieci neuronowych stanowią te o radialnej funkcji bazowej (ang. radial basis function neural networks – sieci neuronowe typu RBF), w której neuron ukryty realizuje funkcję zmieniającą się radialnie wokół wybranego centrum . Reprezentuje on hipersferę dokonującą podziału kołowego wokół punktu centralnego – rysunek 1 [10].
Rys. 1. Podział przestrzeni danych przez sieć radialną;
Źródło: [10] Niech i oznaczają dwa punkty leżące
w przestrzeni . Punkt uważany jest za ustalony i nazywany punktem centrum. Punkt uważany jest za zmienny.
Radialną funkcją bazową nazywa się funkcję postaci:
, , , (3.1)
gdzie: , jest odległością między punktami i .
Centrum w powyższej definicji gra rolę parametru funkcji. Funkcje radialne nazywane bywają czasami jądrami (ang. kernels).
Przy określaniu odległości między punktami i używa się najczęściej odległości euklidesowej [5].
, || || / . (3.2)
Najczęściej stosowaną funkcją bazową jest
radialna funkcja Gaussa określana wzorem:
, , exp || || , (3.3)
gdzie: jest wektorem wartości wejściowych, to
wektor określający centra funkcji bazowych. Wartość parametru kontroluje własności gładkości funkcji interpolującej [6].
4. Opis algorytmu śledzenia
Wiarygodne śledzenie obiektu może zostać osiągnięte, jeżeli możliwa jest separacja obszaru zawierającego obiekt od otaczającego tła w każdej chwili. Pierwszym krokiem będzie utworzenie funkcji gęstości prawdo-podobieństwa (histogramów) dla obiektu ( ) oraz tła ( ). Do określenia, które z pikseli należą do obiektu, a które nie, wykorzystany został logarytm wskaźnika wiarygodności:
, ,
, (4.1)
gdzie: i są prawdopodobieństwami
przynależności -tego piksela odpowiednio do obiektu lub tła; jest małą niezerową wartością służącą do uniknięcia numerycznej nie-stabilności. Nieliniowy logarytm wiarygodności mapuje dystrybucję obiekt/tło jako wartości pozytywne dla barw związanych z pierwszym planem oraz jako wartości ujemne dla pikseli o barwach związanych z tłem [12].
Binaryzacja obrazu określona jest następującym wzorem:
1 ż 0 ż , (4.2)
gdzie: jest wartością progową decydującą
o przynależności pikseli. Kolejnym krokiem podczas tworzenia
modelu obiektu zainteresowania jest wybór odpowiedniej przestrzeni cech. W tym celu dla każdego piksela określić można wartości reprezentujące informacje o jego barwie, bazując na różnych systemach określania barw (RGB, YCbCr, HSV). Wartością charakteryzującą piksel była również liczba określająca przynależność piksela do tła bądź obiektu (odpowiednio była to wartość −1 oraz +1).
Algorytm klasyfikacji oparty został na dwóch sieciach typu RBF: • zadaniem pierwszej jest maksymalizacja
poprawnej klasyfikacji pikseli należących do obiektu
• zadaniem drugiej jest maksymalizacja poprawnej klasyfikacji pikseli nie- należących do obiektu (należących do tła).
Uproszczony schemat sztucznej sieci neu-ronowej zaprezentowany jest na rysunku 2.

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 33−39 (2013)
35
Rys. 2. Uproszczona architektura
sieci neuronowej typu RBF. Źródło: [12]
Problem klasyfikacji dwuklasowej może
zostać przedstawiony w sposób następujący: para , , 1,2, … , ( – liczba pikseli) przedstawia parę próbka–etykieta, gdzie jest n-wymiarowym wektorem w przestrzeni cech a jest etykietą jednej z dwóch klas. Zadaniem procesu klasyfikacji jest przypisanie etykiety dla nowego wektora w przestrzeni cech, z odpowiednią dokładnością.
Przy założeniu, że neurony ukryte realizują funkcję Gaussa o parametrach (wektor wartości średnich w przestrzeni cech) oraz (wariancja), wyjście z sieci można określić następującym wzorem:
∑ exp , (4.3)
gdzie − wartości wag pomiędzy warstwą ukrytą a neuronami wyjściowymi, – wektor wartości wejściowych z uwzględnieniem wag wejściowych. Postać macierzowa (4.3):
, (4.4)
gdzie:
, , , , … , ,
, , … , ,, (4.5)
− funkcja Gaussa, i-ty wiersz odpowiada
i-temu ukrytemu neuronowi w odniesieniu do wartości wejściowych , , … . . W praktycznych zastosowaniach liczba neu-ronów ukrytych jest znacznie mniejsza od ilości danych wejściowych.
Wartości parametrów funkcji Gaussa wybierane są losowo, natomiast wagi połączeń
pomiędzy neuronami wyjściowymi oraz neuronami warstwy ukrytej wyznaczane są analitycznie. Jeżeli , to wartości wag ( ) obliczane są z wykorzystniem metody najmniej-szych kwadratów jako [8]:
, (4.6)
gdzie: jest pseudo-odwrotną macierzą Moore’a-Penrose’a; przyjmujemy .
Projektowanie klasyfikatora opartego na sieciach typu RBF składa się z dwóch faz. Postępowanie w pierwszej fazie, tzw. fazie rozwoju klasyfikatora, można zawrzeć w następujących krokach: 1. Przypisanie poszczególnym neuronom sieci
typu RBF losowych wartości parametrów oraz .
2. Obliczenie macierzy wyjściowej warstwy ukrytej .
3. Estymacja wartości macierzy . 4. Obliczenie dokładności klasyfikacji
(w procentach) pikseli należących do obiektu oraz tła według wzorów:
100
(4.7)
100 ł
(4.8)
5. Zapisanie wartości parametrów neuronów warstwy ukrytej, dla których i osiągnęły maksymalne wartości. W przypadku fazy drugiej – fazy adaptacji
online, dla każdej kolejnej pary , wykonywane są następujące czynności [12]: 1. Obliczony zostaje wektor wartości
wyjściowych warstwy ukrytej: , , , , … , ,
2. Obliczone zostaje wyjście:
(4.9) 3. Następuje adaptacja wag wyjściowych α,
korzystając z algorytmu najmniejszych kwadratów (ang. RecursiveLeastSquares).
, (4.10)
. (4.11)

J. Szymonik, Sztuczne sieci neuronowe o radialnych funkcjach bazowych…
36
Ze względu na to, iż szybkość działania algorytmu jest bardzo istotna, należy wybrać tylko nieliczne piksele z każdej kolejnej ramki w celu przeprowadzenia adaptacji wag (jedną z proponowanych metod jest wybranie pikseli tworzących spiralę Archimedesa).
5. Model obiektu i jego lokalizacja Klasyfikatory oparte na sztucznych sieciach neuronowych są w stanie aproksymować prawdopodobieństwo a posteriori z dowolną dokładnością [11]. Etykiety dwóch klas oznaczone są jako +1 lub −1. Prawdo-podobieństwo a posteriori piksela , otrzymanego z wykorzystaniem klasyfikatora obiektu:
| , , . (5.1)
W podobny sposób obliczane jest prawdopodobieństwo a posteriori piksela , otrzymanego z wykorzystaniem klasyfikatora pikseli nienależących do obiektu.
| , , . (5.2)
Model celu opracowywany jest przy użyciu
tylko tych pikseli, które zostały sklasyfikowane poprawnie jako piksele należące do obiektu przez oba klasyfikatory (np. w klasyfikatorze obiektu piksele, które posiadają prawdo-podobieństwo a posteriori większe niż 0.5, są zadeklarowane jako należące do klasy obiektu). W ten sposób otrzymujemy model celu w postaci:
| min , 1.0 . (5.3)
Lokalizacja celu w poszczególnych ramkach sekwencji wideo jest osiągana poprzez iteracyjne poszukiwanie mody prawdopodobieństwa a posteriori estymowanego przez sieć neuronową typu RBF.
Położenie środka kandydata na cel w obecnej ramce jest początkowo takie samo jak to estymowane dla obiektu w poprzedniej ramce. Rozważmy k-tą iterację lokalizacji obiektu. Niech będzie środkiem kandydata na cel,
− zbiorem pikseli kandydata na obiekt, 1, … , , ze środkiem w punkcie .
W takim wypadku prawdopodobieństwo a posteriori i-tego piksela | otrzymywane jest jako:
| min | , 1.0 | ). (5.4)
Prawdopodobieństwo kandydata na cel podczas k-tej iteracji ( ) otrzymywane jest poprzez testowanie cech otrzymanych z lokalizacji . Nowa lokalizacja środka obiektu jest estymowana jako środek ciężkości prawdopodobieństw a posteriori ważonych modelem celu ( ), co przedstawia równanie (5.5):
∑ | |∑ | |
. (5.5) Operacja iteracji zostaje zakończona w momencie, gdy zmiana w lokalizacji środka ciężkości dla dwóch kolejnych iteracji spadnie poniżej określonej wartości [12]. 6. Graficzny interfejs użytkownika
W celu przeprowadzania symulacji przygotowany został autorski graficzny interfejs użytkownika (wykorzystujący środowisko programistyczne Matlab®) przedstawiony na rysunku 3. Poniżej opisane zostały poszczególne elementy okna oraz ich funkcje: 1. Przycisk Wybierz Film służy do wskazania
ścieżki pliku wideo, z którego użytkownik będzie korzystał podczas testowania trakera.
2. Przycisk Odtwórz Film daje możliwość podglądu wybranego pliku.
3. Przycisk Przygotuj Dane wykonuje opera-cje oddzielenia wybranego obiektu od tła oraz przygotowuje odpowiednią macierz cech w celu zapisania obiektu w przestrzeni cech.
4. Przycisk Trenowanie Sieci służy do wytrenowania sztucznej sieci typu RBF.
5. Okienko wyświetlające czas, jaki był potrzebny do wytrenowania sieci z wykorzystaniem uprzednio przygotowanych danych w sekundach.
6. Okienko wyświetlające poprawność klasyfikacji pikseli jako należących do celu (%).
7. Okienko wyświetlające poprawność klasyfikacji pikseli jako należących do tła (%).
8. Przycisk Rozpocznij Śledzenie uruchamia proces śledzenia wybranego przez użytkownika obiektu.
9. Okno wyświetlające efekt działania trakera.

7. P Podczporów
z b
Wwarsti wyekspew wadziałazostaalgorwe w
Sprzepwideo• r
r(
• sm
BIUL
Rys. 3. GrafŹródło
Podsumow
zas symuwnaniu podlez adaptacją obez adaptacjW obu altwy ukryteynosi 16. erymentalniearstwie ukrytania algorytm
ały pod kąrytmu na zak
wprowadzeniuSymulacje dprowadzone o zaczerpnięrobot.avi, nrobot człek(rysunek 4a)samolot.avi, myśliwiec Su
1
2
3
4
5
6
7
LETYN INST
ficzny interfejso: opracowani
wanie
ulacji dziaegały dwie jeonline i online. lgorytmach ej sieci Wartość ta
e – powyżtej nie zaobsemu. Symulacątem sprawkłócenia i pru. działania algzostały na dętych z portalna którym kokształtny
na którymu-30 (rysune
1
2
TYTUTU SYS
s użytkownikaie własne
ałania algego konfigur
liczba neujest taka
a została wżej 16 neuerwowano pcje przeprowdzenia odproblemy om
gorytmu prodwóch sekwelu youtube.cośledzony
bądź jego
m śledzony ek 4b).
9
STEMÓW INF
a.
gorytmu racje:
uronów sama
wybrana uronów oprawy
wadzone porności
mówione
ogramu encjach om:
będzie część
będzie
pdm••
•
nndzw
wzpozz2bbpp•
•
t(og
drp
8
FORMATYC
Rys. 4. a) gł
Ź
Na pprzygotowandokładniejszmów: • orygina• zaszumi
o średni• zaszumi
klatki zpoddanez wykfiltru GstandardPodczas
na tak przynie było różdetekcji oraz metod niewykonaniem
Różnicaw momencizachowania przesłonięciaobrazów przzostał obiezakłócenie. O220 x 10 mabadanego obbez adaptpoprawnościparametrów • poprawn
do obiek• poprawn
do tła ntraker gubił c(rysunek 5)online po prgo dalej popr
Dopierodwukrotnie srozmiaru 22podążał za
a)
CZNYCH 11 3
Przykłady obłowa robota c
b) myśliwŹródło: opraco
podstawie ne zostały ze zbadanie
alny – w dobriony – dodaiej 0 oraz waiony i rozmaszumionej e operacji rkorzystaniemGaussa o rdowym odchs badania dzygotowanychżnicy w przaz śledzenie miała pro
m tych operaca w dziie przesłoniętrakera w p
a śledzonegozedstawiającyekt, który Obiekt ten toający na celubiektu. W tytacji wykią działanwytrenowanność klasyfiktu na pozioność klasyfia poziomie 9cel po jego p). Algorytmrzejściu celurawnie (rysuo w przszerokości p20 x 20) alga obiektem
33−39 (2013)
biektów do ślezłekokształtneiec Su-30. owanie własne
sekwencji nowe, mają
e właściwoś
rej jakości any został szariancji 0.025mazany – psekwencji wrozmazania
m dolnoprzrozmiarze 1hyleniu równziałania obu h sekwencjaeprowadzanyia obiektówoblemów z cji. iałaniu pojęcia celu. Aprzypadku co obiektu, dych ruch rob
będzie o prostokąt ou przesłonięcym przypadk
kazał się nia. Mimonia sieci: ikacji pikselimie 92% ikacji pikseli93%, przejściu prz
m śledzący u przez przesunek 6). zypadku pprostokąta−prgorytm z ad
po przej
b)
37
edzenia: ego;
e
obrazówące na celuści algoryt-
zum Gaussa5 poszczególnewideo zostały
(ang. blur)zepustowego0 x 10 oraz
nym 10. algorytmówch obrazówym procesie
w − żadnapoprawnym
ojawiła sięAby zbadaćczęściowego
do sekwencjibota dodanywprowadzał
o wymiarachcie ok. 30%ku algorytm
niewielkąo dobrych
i należących
i należących
ez przesłonęz adaptacjąsłonę śledził
powiększeniarzesłony (dodaptacją niejściu przez
7
w u -
a
e y ) o z
w w e a
m
ę ć o i y ł h
% m ą h
h
h
ę ą ł
a o e z

38
przeszkodę.powierzchn
Rys. 5. Rez
w prz
Rys. 6. Re
w przypa
Powyż
wyższość sieciach neonline nadprocesu a
J. Szym
. Przesłona ni śledzonego
zultat działanizypadku wystą
przesłonŹródło: oprac
ezultat działanadku częściowŹródło: oprac
ższe rozwatrakera op
euronowych d algorytmeadaptacji.
monik, Sztuczn
zajmowała o obiektu.
ia algorytmu bąpienia części
nięcia celu. cowanie własn
nia algorytmu wego przesłoncowanie własn
ażania wspartego na
typu RBF em niewyko
Pomimo
ne sieci neuron
ponad 50%
bez adaptacji iowego
ne
z adaptacją nięcia celu. ne
skazują nsztucznych
z adaptacjorzystującympoprawnego
nowe o radial
%
a h ą
m o
śledzenstąpienz wykGaussaporadz
Isoparty wrażliwśledzonzmianę
Coz racjii brakmoże rzeczywalgorytmetodazaimplśledzenSystem 8. Bi [1] J.
”DNWan
[2] Akri z
[3] AmBim
[4] AmalSy
[5] ARoW
[6] CReO
[7] Z.NeScO
[8] G”Eap
[9] E.Th
[10] S.AlTe
lnych funkcjac
nia obiektnia szumu Gkorzystaniema, prostszy zzić sobie z cztotne jest
na sieciawy na zmianego, jego oę barwy obieo więcej, zapi niewielkicku potrzeby
być stosowistego. W tmami rozpoa adaptacyjlementowanania zagrożeń
ms).
ibliografia
Ahmed, M.NDesign and Imetwork for R
World Academnd Technolog. Ameljańczy
ryterialna w pzarządzania,. Ameljańczy
modelowania iuletyn Instytatycznych, N. Ameljańczy
models in medgorithms”, Bystems, Vol. . Bartkowiakozszerzone A
Wrocławski, g.M. Bishop, ecognition, Oxford, 2005.. Ghahraman
Networks, Depcience, Univctober 1997..B. Huang, Q
Extreme learnpplications”, . Maggio, A.heory and Pr. Osowski, Silgorytmicznyechniczne, W
ch bazowych…
tów w Gaussa lub
m filtru dolz algorytmówzęściowym p
spostrzeżenach neuronany pozycji świetlenia (c
ektu). prezentowanch wymagańy długiego owana w s
połączeniu oznawania wjna śledzena np. w systeń (ang. Video
a
N. Jafri, J. Amplementati
Real-Time Obmy of Sciencegy, 6/2005. yk, Optymalproblemach Ossolineumyk, „Matemapajęczynowetutu Systemó
Nr 4, str. 9–1yk, ”Multicrdical diagnosBio-algorithm21, No. 1 (2
k, Sieci NeurANN08, Uniwgrudzień 200Neural Netw
Oxford Univ
ni, Learning Bpartment of Cersity of Tor. Q.Y. Zhu, C.ning machinNeurocompu
. Cavallaro, Vractice, Wileieci Neuronoym, WydawnWarszawa 19
…
przypadku rozmycia o
lnoprzepustow nie był wrzesłonięciem
nie, że algnowych nie
(rotacji) obco pociąga za
na sieć neuronń obliczenio
jej trenowsystemach
z odpowiewzorców, b
nia może zemie detekcjo Threat Dete
Ahmad, M.I. Kion of a neurbject Trackine, Engineerin
lizacja wielo-sterowania
m, Wrocław, atyczne aspeego obiektów
ów Infor-6 (2009).
riteria similarstics support ms and Med-013).
ronowe. Notawersytet 08. works for Patersity Press,
Bayesian Computer ronto, Canad
K. Siew, ne: Theory anuting 70 (200Video Trackiey, 2011. owe w Ujęciunictwa Nauko97.
wy- obrazu owego
wstanie m. orytm jest biektu a sobą
nowa, owych wania, czasu
ednimi badana zostać i oraz ection
Khan, al ng”, ng
-
1984. ekty w”,
rity
atki
ttern
da,
nd 06). ing
u owo-

BIULETYN INSTYTUTU SYSTEMÓW INFORMATYCZNYCH 11 33−39 (2013)
39
[11] R. Rojas, A short proof of the posterior probability property of classifier neural networks, Institut für Informatik, Freie Universität, Berlin 1996.
[12] R. Venkatesh Babu, S. Suresh, A. Makur, ”Online adaptive radial basis function networks for robust object tracking”, Comput. Vis. Image Understand., 2009.
Artificial neural networks with radial basis functions
for video object tracking
J. SZYMONIK
The main problem considered in this article was the artificial neural network design for target localization and target tracking in video sequence, with the use of Matlab environment. What is more, the algorithm resistance to noise and disturbances that may occur was studied. The article presents the architecture of artificial neural network with radial basis functions. The algorithm for tracking as well as the method for target modeling and localization with the use of the above network architecture is shown. In the summary there are results of conducted simulations in Matlab of video trackers based on artificial neural networks.
Keywords: object tracking, artificial neural networks, radial basis functions.