BADANIA PODSYSTEMU KONTROLI …...Studenckie Koło Naukowe Nowoczesnych Technik Sterowania Ruchem...
12
PRACE NAUKOWE POLITECHNIKI WARSZAWSKIEJ z. 69 Transport 2009 Andrzej KOCHAN 1 , Juliusz KAROLAK 2 1 Politechnika Warszawska Zaklad Sterownia Ruchem, Wydzial Transportu ul. Koszykowa 75, 00-662 Warszawa 2 Politechnika Warszawska, Wydzial Transportu Studenckie Kolo Naukowe Nowoczesnych Technik Sterowania Ruchem Kolejowym ”Balisa”, ul. Koszykowa 75, 00-662 Warszawa BADANIA PODSYSTEMU KONTROLI DYSPOZYTORSKIEJ Streszczenie Artykul opisuje wybrane zagadnienia zwizane z implementacj systemu kontroli dyspozytorskiej(kd). Przedstawiona zostala podstawowa funkcjonalno podsystemu kd, róne warianty konfiguracji oraz nowe funkcje wynikajce midzy innymi z wymaga interoperacyjnoci zawartych w Technicznych Specyfikacjach Interoperacyjnosci sformulowanych przez Europejsk Agencje Kolejow ERA. Wskazane zostaly take nowe funkcje charakterystyczne dla stanowisk laboratoryjnych w postaci symulatorów, które pozwol na rozszerzenie zastosowania podsystemu kd w dydaktyce. Eksperymenty przeprowadzane s z wykorzystaniem systemu ILTOR-2. Slowa kluczowe: kierowanie ruchem kolejowym, kontrola dyspozytorska, ksr, ILTOR-2, TSI, Multi-Touch. 1. WPROWADZENIE W dziedzinie sterowania i kierowania ruchem kolejowym coraz wicej funkcji realizowanych jest przy pomocy systemów komputerowych i informatycznych. Umiejtno poslugiwania si komputerami wymagane jest niemal na kadym stanowisku pracy zwizanym z transportem kolejowym. Systemy informatyczne zwizane ze sterowaniem i kierowaniem ruchem pocigów jeszcze do niedawna pozostawaly w pewnej separacji od systemów informatycznych ogólnego zastosowania. Bylo to argumentowane specyfik ich przeznaczenia i powizaniem z funkcjami bezpiecznociowymi. Obecnie systemy te staj si bardziej otwarte i s lczone z innymi systemami informatycznymi przy pomocy odpowiednio zaprojektowanych interfejsów. Zjawisko to jest szczególnie widoczne w warstwie kierowania ruchem, gdzie informacja o rzeczywistym ruchu pocigów, przyczynach opónie itp. znajduje coraz wiksz rzesz odbiorców. W zwizku z tym tematyka systemów informatycznych w dziedzinie kierowania i sterowania ruchem kolejowym (ksr) jest cigle obszarem interesujcym dla poszukiwa nowych rozwiza i porzdkowania ju istniejcych. W Zakladzie Sterowania Ruchem powstaje zintegrowane stanowisko „KSR Sosna” bdce kompletn implementacj systemu kierowania i sterowania ruchem kolejowym. Kompletn w takim znaczeniu, e jego elementy nale do wszystkich warstw definiowanych dla systemów tej klasy[7][8]. Przy Zespole Sterowania Ruchem Kolejowym na Wydziale Transportu od roku 2008 dziala kolo naukowe „Balisa” skupiajce studentów i pracowników naukowych zajmujcych
Transcript of BADANIA PODSYSTEMU KONTROLI …...Studenckie Koło Naukowe Nowoczesnych Technik Sterowania Ruchem...
P R A C E N A U K O W E P O L I T E C H N I K I W A R S Z A W S K I E J
z. 69 Transport 2009
Andrzej KOCHAN1, Juliusz KAROLAK2
1 Politechnika Warszawska Zakład Sterownia Ruchem, Wydział Transportu
ul. Koszykowa 75, 00-662 Warszawa 2 Politechnika Warszawska, Wydział Transportu
Studenckie Koło Naukowe Nowoczesnych Technik Sterowania Ruchem Kolejowym ”Balisa”, ul. Koszykowa 75, 00-662 Warszawa
BADANIA PODSYSTEMU KONTROLI DYSPOZYTORSKIEJ
Streszczenie
Artykuł opisuje wybrane zagadnienia zwi�zane z implementacj� systemu kontroli dyspozytorskiej(kd). Przedstawiona została podstawowa funkcjonalno� podsystemu kd, ró�ne warianty konfiguracji oraz nowe funkcje wynikaj�ce mi�dzy innymi z wymaga� interoperacyjno�ci zawartych w Technicznych Specyfikacjach Interoperacyjnosci sformułowanych przez Europejsk� Agencje Kolejow� ERA. Wskazane zostały tak�e nowe funkcje charakterystyczne dla stanowisk laboratoryjnych w postaci symulatorów, które pozwol� na rozszerzenie zastosowania podsystemu kd w dydaktyce. Eksperymenty przeprowadzane s� z wykorzystaniem systemu ILTOR-2.
Słowa kluczowe: kierowanie ruchem kolejowym, kontrola dyspozytorska, ksr, ILTOR-2, TSI, Multi-Touch.
1. WPROWADZENIE
W dziedzinie sterowania i kierowania ruchem kolejowym coraz wi�cej funkcji realizowanych jest przy pomocy systemów komputerowych i informatycznych. Umiej�tno�posługiwania si� komputerami wymagane jest niemal na ka�dym stanowisku pracy zwi�zanym z transportem kolejowym. Systemy informatyczne zwi�zane ze sterowaniem i kierowaniem ruchem poci�gów jeszcze do niedawna pozostawały w pewnej separacji od systemów informatycznych ogólnego zastosowania. Było to argumentowane specyfik� ich przeznaczenia i powi�zaniem z funkcjami bezpieczno�ciowymi. Obecnie systemy te staj� si�bardziej otwarte i s� ł�czone z innymi systemami informatycznymi przy pomocy odpowiednio zaprojektowanych interfejsów. Zjawisko to jest szczególnie widoczne w warstwie kierowania ruchem, gdzie informacja o rzeczywistym ruchu poci�gów, przyczynach opó�nie� itp. znajduje coraz wi�ksz� rzesz� odbiorców. W zwi�zku z tym tematyka systemów informatycznych w dziedzinie kierowania i sterowania ruchem kolejowym (ksr) jest ci�gle obszarem interesuj�cym dla poszukiwa� nowych rozwi�za� i porz�dkowania ju� istniej�cych.
W Zakładzie Sterowania Ruchem powstaje zintegrowane stanowisko „KSR Sosna” b�d�ce kompletn� implementacj� systemu kierowania i sterowania ruchem kolejowym. Kompletn� w takim znaczeniu, �e jego elementy nale�� do wszystkich warstw definiowanych dla systemów tej klasy[7][8].
Przy Zespole Sterowania Ruchem Kolejowym na Wydziale Transportu od roku 2008 działa koło naukowe „Balisa” skupiaj�ce studentów i pracowników naukowych zajmuj�cych
Andrzej Kochan, Juliusz Karolak
si� nowoczesnymi technikami sterowania i kierowania ruchem kolejowym. W roku 2009 koło naukowe realizuje grant „Opracowanie i wykonanie stanowiska kontroli dyspozytorskiej systemu KSR Sosna”, którego celem jest badanie nowych funkcji podsystemu kontroli dyspozytorskiej (kd) oraz poszukiwanie pozwalaj�cych na ich realizacj� rozwi�za�technicznych. W ramach grantu zdefiniowano nast�puj�ce zadania badawcze zwi�zane z wymaganiami zapewniaj�cymi interoperacyjno� zawartymi w Technicznych Specyfikacjach Interoperacyjno�ci (TSI) [13][10][11][12][6]:
• Zadanie 1: Wymiana informacji pomi�dzy przewo�nikiem a podsystemem kd – w ramach tego zadania s� implementowane algorytmy pozwalaj�ce na odpowiedni� reakcj� systemu kd na komunikaty wysyłane przez przewo�nika oraz wysyłanie odpowiednich komunikatów w zwi�zku ze zmieniaj�c� si� sytuacj� ruchow�, uzupełniana jest tak�e struktura bazy danych.
• Zadanie 2: Baza danych opisuj�ca tabor i infrastruktur� – to zadanie prowadzi do zdefiniowania odpowiednich struktur baz danych pozwalaj�cych na przechowywanie informacji o taborze i infrastrukturze w sposób opisany w TSI.
• Zadanie 3: Baza danych o ograniczeniach w infrastrukturze – w ramach tego zadania tworzona jest koncepcja bazy danych oraz aplikacje umo�liwiaj�ce dost�p do „Bazy danych powiadomie� o ograniczeniach w infrastrukturze”.
• Zadanie 4: Informacja o poci�gu w czasie rzeczywistym – realizacja rozwi�za� w ramach tego zadania umo�liwia prowadzenie podgl�du przemieszczania si� poci�gów po sieci kolejowej.
• Zadanie 5: Transmisja danych – TSI wymuszaj� na konstruktorach zastosowanie sieci komputerowej o odpowiedniej architekturze (peer-to-peer) i protokołów nale��cych do pełnego pakietu protokołów internetowych.
• Zadanie 6: Rejestracja awarii systemu – w ramach tego zadania, zgodnie zapisami w TSI OPE odnosz�cej si� do podsystemu „Ruch kolejowy” rejestracji podlega b�d� awarie wszelkich urz�dze� srk zaimplementowanych na stanowisku Sosna.
Ponadto okre�lono zadania wynikaj�ce z rozbudowy funkcjonalno�ci podsystemu kd oraz poprawy ergonomii jego obsługi:
• Zadanie 7: Symulacja rzeczywistego ruchu poci�gów w kontrolowanym przez podsystem kontroli dyspozytorskiej obszarze sieci kolejowej,
• Zadanie 8: Wykorzystanie panelu dotykowego dla poprawy ergonomii obsługi stanowiska kontroli dyspozytorskiej.
• Zadanie 9: Mo�liwo�ci współpracy podsystemu kierowania ruchem kolejowym z europejskim systemem sterowania ruchem poci�gów (ETCS) na ró�nych poziomach,
• Zadanie 10: Modelowanie elementów ksr w technologi obiektowej z wykorzystaniem UML[12].
W kolejnych punktach artykuł opisuje struktur� stanowiska „KSR Sosna”, obecn�funkcjonalno� podsystemu kontroli dyspozytorskiej oraz wybrane funkcje, które powstan�w wyniku realizacji wy�ej wymienionych zada�.
2. ZINTEGROWANE STANOWISKO KSR SOSNA
Stanowisko KSR Sosna stanowi�ce wyposa�enie laboratorium Sterowania Ruchem Kolejowym Wydziału transportu jest struktur� zło�on� z wielu elementów. Stanowisko integruje w sobie stanowiska składowe wyst�puj�ce w ró�nych warstwach funkcjonalnych modelu warstwowego ksr opisanego dalej.
78
Badania podsystemu kontroli dyspozytorskiej
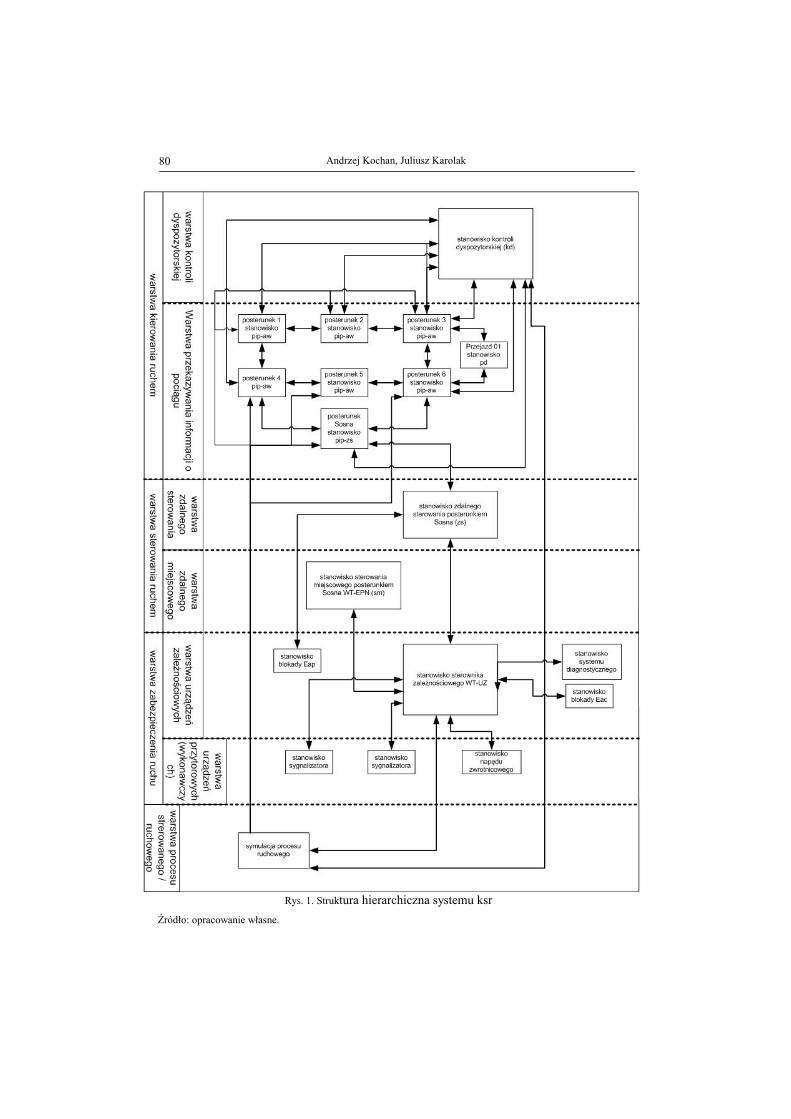
System kierowania i sterowania ruchem kolejowym (ksr) jest struktur� hierarchiczn�tworz�c� okre�lone poziomy i warstwy [3] (rys. 1).
Poziom zabezpieczenia ruchu obejmuje działania operacyjne, funkcje i rozwi�zania techniczne gwarantuj�ce bezpieczny ruch pojazdów kolejowych po układzie torowym. Na tym poziomie wyró�nia si�:
• warstw� wykonawcz� obejmuj�c� urz�dzenia wykonawcze sterowania ruchem kolejowym, urz�dzenia detekcji stanów awaryjnych taboru, urz�dzenia ł�czno�ci przewodowej i radiowej, urz�dzenia telewizji przemysłowej itd.;
• warstw� zale�no�ciow� obejmuj�c� podzespoły urz�dze� automatyki kolejowej uzale�niaj�ce wykonanie polece� nastawczych od spełnienia warunków ich realizacji. Fragment stanowiska realizuj�cy funkcje tej warstwy – komputerowy sterownik zale�no�ciowy pokazany jest na rys. 2
Poziom sterowania ruchem obejmuje działania operacyjne, funkcje i rozwi�zania techniczne zapewniaj�ce podejmowanie i realizowanie decyzji wynikaj�cych z rzeczywistego lub planowanego ruchu pojazdów kolejowych. Na tym poziomie wyró�nia si�:
• warstw� sterowania miejscowego (ms) rozumianego jako scentralizowane sterowanie ruchem poprzez oddziaływanie na urz�dzenia zewn�trzne z wykorzystaniem urz�dze�sterowania zlokalizowanych na sterowanym posterunku, przewiduj�ce mo�liwo�bezpo�redniego wgl�du i ingerencji personelu prowadz�cego ruch (dy�urnego ruchu) w sytuacj� ruchow�;
• warstw� sterowania zdalnego (zs) rozumianego jako scentralizowane sterowanie ruchem poprzez oddziaływanie z nastawni zdalnego sterowania na urz�dzenia posterunku sterowanego, za po�rednictwem urz�dze� zdalnego sterowania, zakładaj�ce całkowity brak mo�liwo�ci bezpo�redniego wgl�du i ingerencji dy�urnego ruchu w sytuacj�ruchow�.
Poziom kierowania ruchem obejmuje rozwi�zania techniczne, funkcje i działania operacyjne zapewniaj�ce �ledzenie i kontrolowanie sytuacji ruchowej oraz wykrywanie i rozwi�zywanie konfliktów ruchowych. Działania te realizowane s� przez dyspozytora liniowego dla odcinka dyspozytorskiego obejmuj�cego kilka okr�gów sterowania, a w ograniczonym zakresie równie� przez dy�urnego ruchu dla okr�gu sterowania (miejscowego lub zdalnego) i s�siaduj�cych okr�gów sterowania. Do tych działa� nale�y zaliczy równie� obowi�zki dró�nika, które prowadz� do wspomagania pracy dy�urnego ruchu w zakresie unikania konfliktów pomi�dzy ruchem kolejowym a ruchem drogowym. Na poziomie kierowania ruchem wyró�nia si�:
• warstw� przekazywania informacji o poci�gach (pip) obejmuj�c� funkcje wymiany informacji pomi�dzy dy�urnymi ruchu s�siaduj�cych posterunków oraz pomi�dzy tym personelem i dyspozytorem liniowym.
• warstw� powiadamiania dró�ników (pd) obejmuj�c� funkcje wymiany informacji pomi�dzy dy�urnymi ruchu a dró�nikami.
• warstw� kontroli dyspozytorskiej (kd) obejmuj�c� scentralizowane kierowanie ruchem poci�gów na odcinku dyspozytorskim, realizowane przez dyspozytora liniowego za pomoc� urz�dze� kontroli dyspozytorskiej.
79
Andrzej Kochan, Juliusz Karolak
Rys. 1. Struktura hierarchiczna systemu ksrródło: opracowanie własne.
80
Badania podsystemu kontroli dyspozytorskiej
Przedstawiony podział ma charakter modelowy i uwzgl�dnia maksymalne rozdzielenie funkcji poszczególnych poziomów, natomiast praktyczne realizacje systemów (urz�dze�) mog� by rozwi�zaniami zawieraj�cymi elementy kilku warstw tego samego poziomu lub ró�nych poziomów ksr.
Na rys.1 uwzgl�dniono dodatkowy poziom nie wyst�puj�cy standardowo w hierarchicznej strukturze systemów ksr. Jest to poziom symulacji procesu ruchowego. Jego wyst�powanie jest naturalne w warunkach badawczych, gdy� zast�puje rzeczywisty proces ruchowy i umo�liwia działanie poszczególnych elementów systemu ksr w laboratorium.
Rys. 2 Sterownik zale�no�ciowy na stanowisku „KSR SOSNA”
ródło: opracowanie własne.
3. KIEROWANIE RUCHEM I PODSYSTEM KONTROLI DYSPOZYTORSKIEJ NA STANOWISKU KSR SOSNA.
Kierowanie ruchem jest okre�lane jako funkcje i działania operacyjne zapewniaj�ce �ledzenie i kontrolowanie sytuacji ruchowej oraz wykrywanie i rozwi�zywanie konfliktów ruchowych[1]. Funkcje te realizowane s� przez podsystem kierowania ruchem (kr) systemu ksr. Podsystem kr składa si� z podsystemów:
81
Andrzej Kochan, Juliusz Karolak
• podsystemu kontroli dyspozytorskiej (kd), • podsystemu przekazywania informacji o poci�gu (pip), • podsystemu powiadamiania dró�ników (pd).
Podsystemy te komunikuj� si� ze sob� wymieniaj�c ze sob� informacje wg schematu na rys. 1 w cz��ci opisanej jako warstwa kierowania ruchem.
Na stanowisku KSR Sosna wszystkie podsystemy kr s� implementowane na bazie systemu ILTOR-2 opracowanego wspólnie przez Wydział Transportu Politechniki Warszawskiej i firmy Kontron oraz Siemens. Obecna konfiguracja podsystem kierowania ruchem kr na stanowisku KSR Sosna składa si� z:
• sze�ciu stanowisk pip, • jednego stanowiska kd.
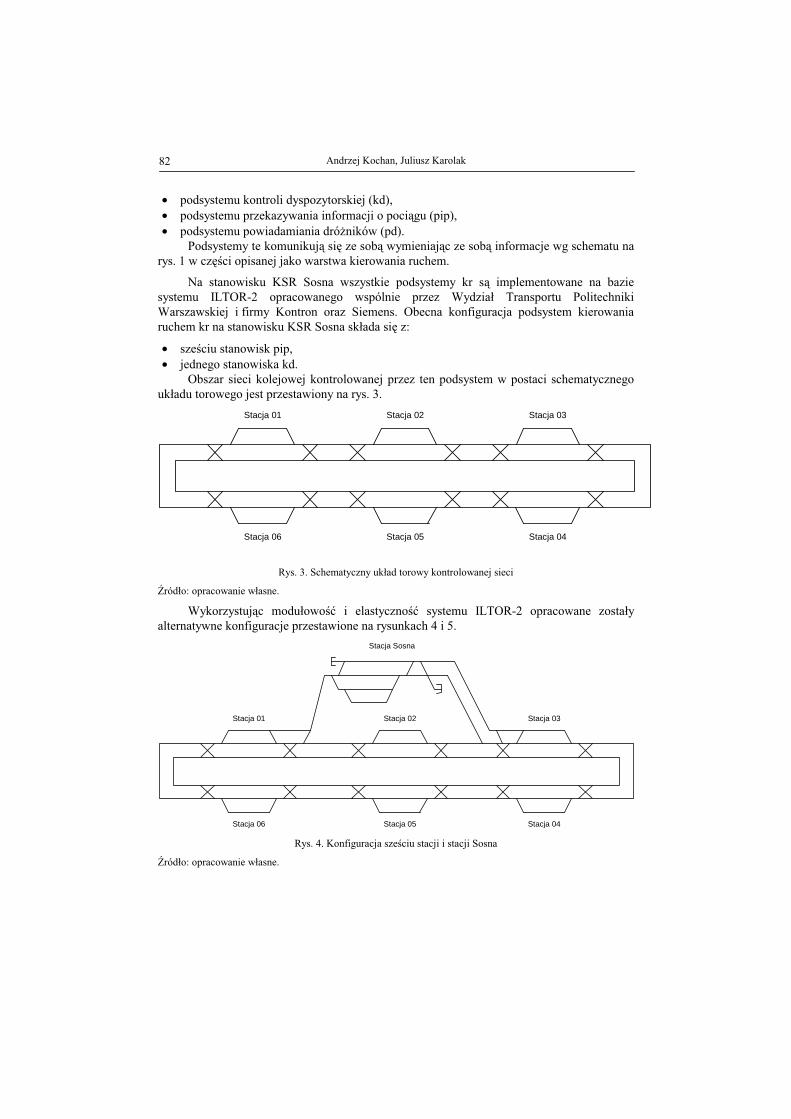
Obszar sieci kolejowej kontrolowanej przez ten podsystem w postaci schematycznego układu torowego jest przestawiony na rys. 3.
Stacja 01 Stacja 02 Stacja 03
Stacja 04Stacja 05Stacja 06
Rys. 3. Schematyczny układ torowy kontrolowanej sieci
ródło: opracowanie własne.
Wykorzystuj�c modułowo� i elastyczno� systemu ILTOR-2 opracowane zostały alternatywne konfiguracje przestawione na rysunkach 4 i 5.
Stacja 01 Stacja 02 Stacja 03
Stacja 04Stacja 05Stacja 06
Stacja Sosna
Rys. 4. Konfiguracja sze�ciu stacji i stacji Sosna
ródło: opracowanie własne.
82
Badania podsystemu kontroli dyspozytorskiej
Stacja 01 Stacja 02 Stacja 03
Stacja 10Stacja 11Stacja 12
Stacja Sosna
Stacja 04Stacja 05Stacja 06
Stacja 07 Stacja 08 Stacja 09
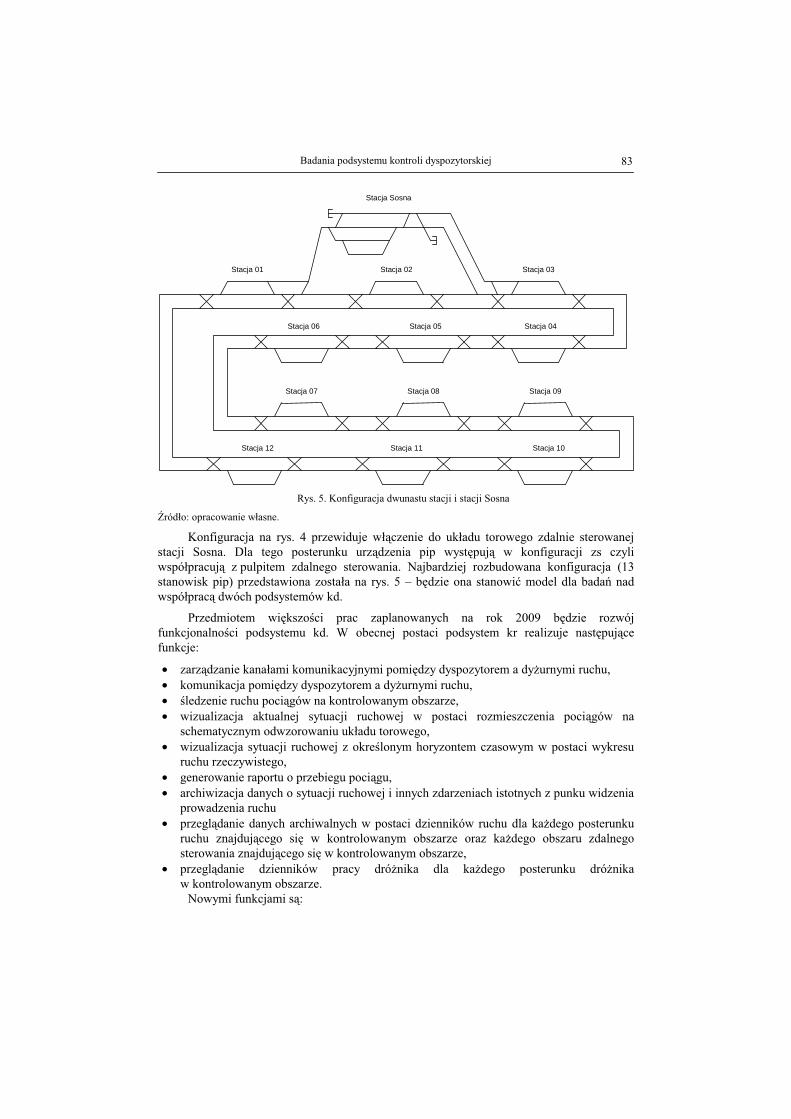
Rys. 5. Konfiguracja dwunastu stacji i stacji Sosna
ródło: opracowanie własne.
Konfiguracja na rys. 4 przewiduje wł�czenie do układu torowego zdalnie sterowanej stacji Sosna. Dla tego posterunku urz�dzenia pip wyst�puj� w konfiguracji zs czyli współpracuj� z pulpitem zdalnego sterowania. Najbardziej rozbudowana konfiguracja (13 stanowisk pip) przedstawiona została na rys. 5 – b�dzie ona stanowi model dla bada� nad współprac� dwóch podsystemów kd.
Przedmiotem wi�kszo�ci prac zaplanowanych na rok 2009 b�dzie rozwój funkcjonalno�ci podsystemu kd. W obecnej postaci podsystem kr realizuje nast�puj�ce funkcje:
• zarz�dzanie kanałami komunikacyjnymi pomi�dzy dyspozytorem a dy�urnymi ruchu, • komunikacja pomi�dzy dyspozytorem a dy�urnymi ruchu, • �ledzenie ruchu poci�gów na kontrolowanym obszarze, • wizualizacja aktualnej sytuacji ruchowej w postaci rozmieszczenia poci�gów na
schematycznym odwzorowaniu układu torowego, • wizualizacja sytuacji ruchowej z okre�lonym horyzontem czasowym w postaci wykresu
ruchu rzeczywistego, • generowanie raportu o przebiegu poci�gu, • archiwizacja danych o sytuacji ruchowej i innych zdarzeniach istotnych z punku widzenia
prowadzenia ruchu • przegl�danie danych archiwalnych w postaci dzienników ruchu dla ka�dego posterunku
ruchu znajduj�cego si� w kontrolowanym obszarze oraz ka�dego obszaru zdalnego sterowania znajduj�cego si� w kontrolowanym obszarze,
• przegl�danie dzienników pracy dró�nika dla ka�dego posterunku dró�nika w kontrolowanym obszarze.
Nowymi funkcjami s�:
83
Andrzej Kochan, Juliusz Karolak
• wymiana informacji pomi�dzy zarz�dc� infrastruktury i przewo�nikiem wg zalece� TSI TAF[13],
• wykorzystanie panelu dotykowego dla obsługi wybranych funkcji podsystemu kd, • mo�liwo� pracy w trybie symulacji z wykorzystaniem symulatora rzeczywistego ruchu
poci�gów na wybranym fragmencie sieci kolejowej.
4. OPIS WYBRANYCH ZADA�
4.1. Zastosowanie monitora dotykowego
Realizacja zadania 8 zakłada zaprojektowanie nowego typu interfejsu opartego o panel dotykowy.
Zastosowanie panelu dotykowego ma na celu optymalizacj� obsługi kontroli dyspozytorskiej. Obszary, w których panel taki mo�e mie zastosowanie to:
• obsługa kanałów transmisji do posterunków ruchu, • wybór telegramu do wysłania, • wybór raportów i analiz, • interaktywne zobrazowanie sytuacji ruchowej.
Z analizy potencjalnych zastosowa� wynika, �e najwi�ksze korzy�ci przyniesie zastosowanie panelu dotykowego przy obsłudze standardowych, cz�sto powtarzanych czynno�ci o charakterze sekwencyjnym, które nie wymagaj� wprowadzania zbyt du�ej ilo�ci danych przy pomocy klawiatury. Analizie nale�ałoby jednak podda równie� mo�liwo�wywoływania na ekranie monitora klawiatury alfanumerycznej, tak, aby mo�liwym było usuni�cie klawiatury i myszy z przestrzeni roboczej dyspozytora. Urz�dzenia te b�d� dost�pne jedynie w przypadku awarii monitora.
Konstrukcja monitora dotykowego opiera si� na jednej z czterech technik, wykorzystuj�cej powstałe w wyniku dotyku:
• zmiany oporu elektrycznego pomi�dzy elektrodami zatopionymi w ekranie, • zmiany pojemno�ci elektrycznej, • przerwania strumienia �wietlnego emitowanego przez sie podczerwonych diod LED
umieszczonych na kraw�dziach ekranu, • zaburzenia fali akustycznej propaguj�cej si� po powierzchni ekranu.
W ramach realizowanego tematu system zostanie wyposa�ony w monitor LCD z tzw. nakładk� rezystancyjn�, czyli urz�dzenie, pozwalaj�ce reagowa komputerowi na dotyk, wykorzystuj�ce pierwsz� z wy�ej opisywanych technik.
Zastosowanie monitora dotykowego wymaga nowych koncepcji programistycznych zwi�zanych z dostosowaniem interfejsu aplikacji, z których korzysta dyspozytor, do sterowania nimi poprzez dotyk ekranu. Elementy aktywne, takie jak: klawisze, symbole, linie wykresów ruchu, powinny cechowa si� rozmiarami odpowiednio wi�kszymi, ni�w przypadku aplikacji obsługiwanej myszk� i klawiatur�, tak, aby zapewni operatywno�stanowiska. Ich kształt, barwa i rozmieszczenie musz� jednak spełnia wymagania wynikaj�ce z rozpoznawalno�ci elementów aplikacji dyspozytorskich. Celowym byłoby równie�rozwa�enie zastosowania sterowania gestami, co umo�liwiłoby wygodny sposób wyboru monitora, którego obraz i powi�kszenie dyspozytor chciałby w danej chwili uzyska na, znajduj�cym si� przed nim monitorze dotykowym.
84
Badania podsystemu kontroli dyspozytorskiej
4.2. Budowa stanowiska dyspozytorskiego
W projektowanym wariancie stanowisko składa si� b�dzie z czterech monitorów LCD o du�ej powierzchni – ka�dy o przek�tnej, co najmniej 22”. Jeden z monitorów b�dzie monitorem dotykowym. Dyspozytor zajmowa b�dzie miejsce przy biurku o wyprofilowanym blacie, na którym, pod regulowanym k�tem i w regulowanej odległo�ci od operatora, zainstalowany b�dzie si� monitor dotykowy. Umo�liwi to ustalenie najkorzystniejszego k�ta obsługi urz�dzenia. Pozostałe trzy monitory zostan� umieszczone powy�ej górnej kraw�dzi pierwszego tworz�c tym samym półkole wokół biurka. Pomi�dzy nim a biurkiem pozostanie przestrze� dostatecznie du�a, by mo�liwe było podej�cie do monitorów. �rodkowy monitor mo�e wisie bezpo�rednio na �cianie. Dwa s�siednie na wysi�gnikach. Rozbudowa stanowiska mo�liwa b�dzie poprzez zawieszenie kolejnych trzech monitorów ponadistniej�cymi.
Monitor dotykowy znajduj�cy si� na biurku, podczas normalnej eksploatacji stanowiska, zasłania b�dzie klawiatur� i mysz, dost�pne po jego uniesieniu i odsuni�ciu w stron�pozostałych trzech monitorów.
Po prawej stronie monitora dotykowego umieszczony zostanie panel ł�czno�ci, zawieraj�cy centralk� telefoniczn� i radiotelefony. Po lewej stronie mo�na b�dzie umie�ciurz�dzenia steruj�ce o�wietleniem sali, �aluzjami, klimatyzacj�, a cało� przykryewentualnie pulpitem z uchwytem na dokumenty.
Obsługa stanowiska odbywa si� b�dzie dwur�cznie. Dyspozytor wybierze wskazaniem dłoni (gest) interesuj�cy go monitor, którego obraz wy�wietlony zostanie natychmiast na monitorze dotykowym. Tym samym uzyska on mo�liwo� sterowania funkcjami powi�zanymi z wy�wietlanym obrazem. Je�eli wy�wietlany b�dzie fragment sieci kolejowej obj�tej dyspozytur�, mo�liwe b�dzie jego manualne przesuwanie wzdłu� linii. Powi�kszenie obiektów (stacji, odst�pów, fragmentów wykresu ruchu itp.) odbywa si� b�dzie przy u�yciu dwóch palców (w skrajnym wypadku nawet obu r�k) dzi�ki technologii Multi-Touch. Jest to technologia obsługi graficznych interfejsów za pomoc� dotyku wi�cej ni� jednym palcem jednocze�nie. Zbli�aj�c do siebie palce przytkni�te do ekranu, dyspozytor zmniejszy obraz, oddalaj�c – powi�kszy go.
Rozmieszczenie opisywanych elementów stanowiska wymaga analizy ergonomicznej i jest uwarunkowane wymiarami antropometrycznymi dyspozytora i jego polem widzenia. Dane niezb�dne do skonstruowania stanowiska uzyskane zostan� drog� bezpo�redniej obserwacji i zbierania opinii pracowników istniej�cych dyspozytur. Dopiero analiza zebranych materiałów i budowa stanowiska pozwoli na weryfikacj� tezy o słuszno�ci wprowadzenia tak radykalnych zmian w stanowisku dyspozytora i sformułowanie zało�e�dotycz�cych budowy stanowisk komputerowych mo�liwych do zastosowania na kolei.
4.3 M.odelowanie systemu kd w j�zyku UML
W ramach zadania 10 prowadzone s� prace zwi�zane z modelowaniem podsystemu kd jako elementu systemu ksr przy pomocy technik obiektowych. Wykorzystywanym j�zykiem opisu jest UML, który jest uznanym standardem w opisie modeli obiektowych. Prace te s�kontynuacj� prac prowadzonych wcze�niej w Zakładzie Sterowania Ruchem Kolejowym[2][9]. Podstawowym �rodkiem wyrazu j�zyka UML s� diagramy. W�ród nich wyró�niamy diagramy opisuj�ce struktury i diagramy opisuj�ce zachowania.
Model obiektowy systemu ksr jest zorganizowany w widoki. Wyró�nione zostały nast�puj�ce widoki:
85
Andrzej Kochan, Juliusz Karolak
• ogólny, • organizacyjny, • systemowy, • danych, • przepisów i specyfikacji technicznych.
Przeznaczeniem widoku ogólnego jest przedstawienie systemu jako cało�ci oraz jako struktury poł�czonych ze sob� komponentów. W tym widoku wyró�nione s� tylko te komponenty, których odr�bno� jest istotna z punktu widzenia cało�ci. Widok ogólny wyznacza zakres architektury, granice systemu, jego otoczenie i okre�la interfejsy. Widok organizacyjny ma za zadanie opisanie �rodowiska, w którym osadzony jest system, w którym b�dzie działał. Widok ten ma identyfikowa organizacje, przedsi�biorstwa, zespoły, stanowiska zaanga�owane w działanie systemu. Przypisywa do nich funkcje i obowi�zki. Wprowadzenie widoku systemowego ma dostarczy opisu �rodków technicznych realizuj�cych lub wspieraj�cych realizacj� celów stawianych przed systemem. Widok ten identyfikuje składowe komponenty systemu. Ma on na celu opisanie funkcji realizowane przez te komponenty i zdefiniowanie zale�no�ci pomi�dzy nimi. Widok danych pozwoli na identyfikacj� danych wykorzystywanych dla działania systemu. Znaczenie poj�cia wykorzystania danych jest tutaj bardzo szerokie. Obejmuje ono identyfikacj�:
• wewn�trznych i zewn�trznych �ródeł danych, • odbiorców danych, • kanałów przepływu danych, • miejsca składowania danych. cmp schemat przykładowego systemu k...
P02 :pipP03 :pip
P04 :pip
P05 :pipP06 :pipP01 :pip
CKR :kd
P_SOSNA :pip
komunikuje si� komunikuje si�
komunikuje si�
komunikuje si�
komunikuje si�
komunikuje si�
komunikuje si�
komunikuje si�
komunikuje si�
komunikuje si�
komunikuje si�
komunikuje si�
komunikuje si�
komunikuje si�
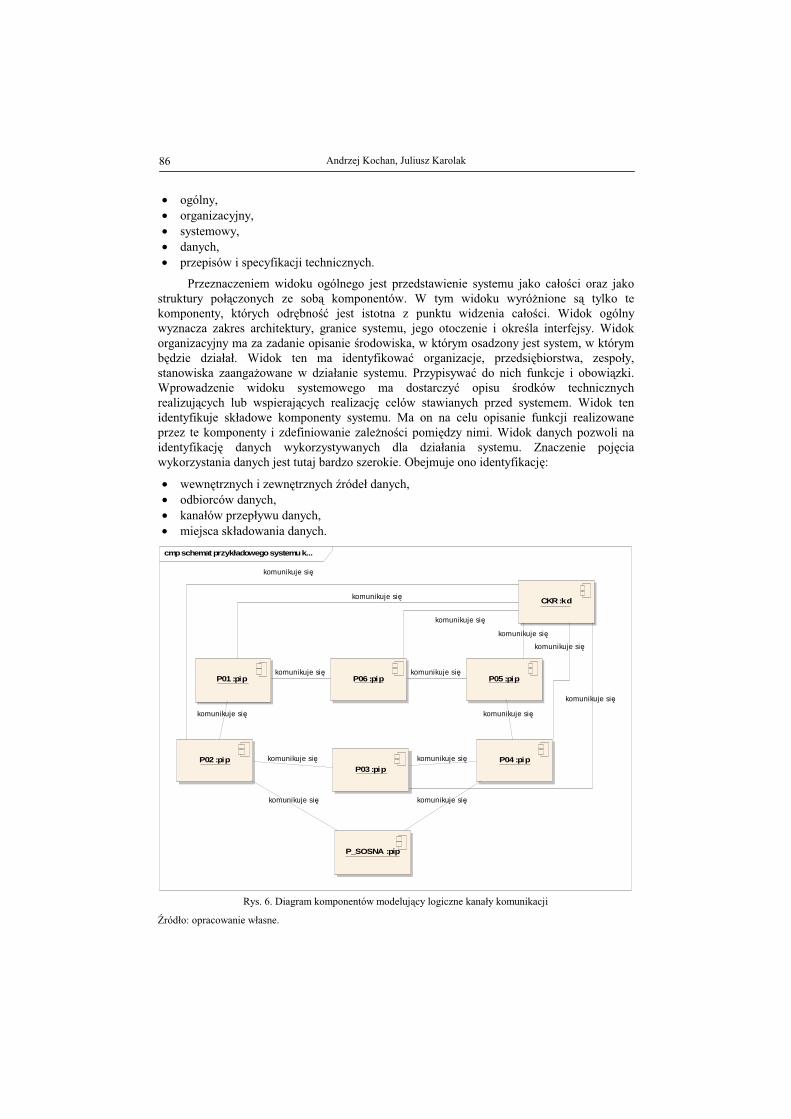
Rys. 6. Diagram komponentów modeluj�cy logiczne kanały komunikacji
ródło: opracowanie własne.
86
Badania podsystemu kontroli dyspozytorskiej
Widoki grupuj� w sobie odpowiednie diagramy. Prezentacja wszystkich diagramów wykracza poza zakres tego opracowania. Przykładem diagramu widoku organizacyjnego. jest diagram przedstawiony na rys.6. Jest to diagram komponentów, na którym w postaci komponentów s� przedstawione podsystemy kierowania ruchem wchodz�ce w skład stanowiska KSR Sosna. Komponenty s� poł�czone zwi�zkami asocjacji, które modeluj�logiczne kanały komunikacji pomi�dzy posterunkami.
sd pytanie o woln� dro...
P01 :Posterunek
zapowiadawczy
P02 :Posterunek
zapowiadawczy
Czy droga wolna dla pocigu 23? ()
Droga wolna dla poci�gu 23()
Odjazd poci�gu 23()
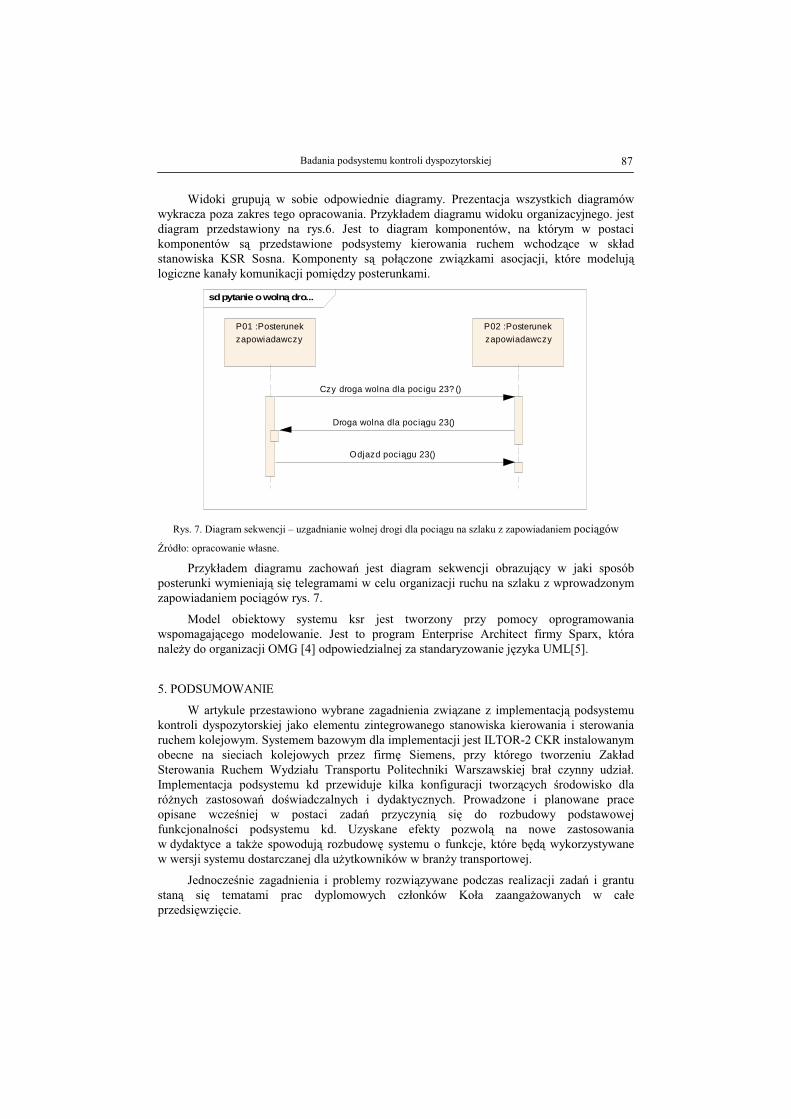
Rys. 7. Diagram sekwencji – uzgadnianie wolnej drogi dla poci�gu na szlaku z zapowiadaniem poci�gów ródło: opracowanie własne.
Przykładem diagramu zachowa� jest diagram sekwencji obrazuj�cy w jaki sposób posterunki wymieniaj� si� telegramami w celu organizacji ruchu na szlaku z wprowadzonym zapowiadaniem poci�gów rys. 7.
Model obiektowy systemu ksr jest tworzony przy pomocy oprogramowania wspomagaj�cego modelowanie. Jest to program Enterprise Architect firmy Sparx, która nale�y do organizacji OMG [4] odpowiedzialnej za standaryzowanie j�zyka UML[5].
5. PODSUMOWANIE
W artykule przestawiono wybrane zagadnienia zwi�zane z implementacj� podsystemu kontroli dyspozytorskiej jako elementu zintegrowanego stanowiska kierowania i sterowania ruchem kolejowym. Systemem bazowym dla implementacji jest ILTOR-2 CKR instalowanym obecne na sieciach kolejowych przez firm� Siemens, przy którego tworzeniu Zakład Sterowania Ruchem Wydziału Transportu Politechniki Warszawskiej brał czynny udział. Implementacja podsystemu kd przewiduje kilka konfiguracji tworz�cych �rodowisko dla ró�nych zastosowa� do�wiadczalnych i dydaktycznych. Prowadzone i planowane prace opisane wcze�niej w postaci zada� przyczyni� si� do rozbudowy podstawowej funkcjonalno�ci podsystemu kd. Uzyskane efekty pozwol� na nowe zastosowania w dydaktyce a tak�e spowoduj� rozbudow� systemu o funkcje, które b�d� wykorzystywane w wersji systemu dostarczanej dla u�ytkowników w bran�y transportowej.
Jednocze�nie zagadnienia i problemy rozwi�zywane podczas realizacji zada� i grantu stan� si� tematami prac dyplomowych członków Koła zaanga�owanych w całe przedsi�wzi�cie.
87
Andrzej Kochan, Juliusz Karolak
LITERATURA [1] D�browa-Bajon Mirosława: Podstawy sterowania ruchem kolejowym. Oficyna Wydawnicza
Politechniki Warszawskiej, Warszawa 2007. [2] D�browa-Bajon Mirosława, Kochan Andrzej, The Computer System of the Railway Station
Information Service ŽELEZNICE NA PRAHU TRETIEHO TISÍCRO^IA "Na ceste k Európskej železnici"�ilina, Słowacja May 2003.
[3] Grochowski Krzysztof, Konopi�ski Lech „Kierowanie i sterowanie ruchem kolejowym w inteligentnym systemie transportowym” Prace Naukowe Politechniki Warszawskiej – Seria Transport z. 61, Warszawa 2007, s. 55.
[4] http://www.omg.org/ [5] http://www.uml.org/ [6] Karolak Juliusz, Kochan Andrzej: Zadania badawcze na stanowisku KSR Sosna w �wietle TSI,
materiały konferencyjne XXVIII Seminarium Kola Naukowego „Mechanik“ Wojskowej Akademii Technicznej, Warszawa 2009.
[7] Kochan Andrzej: Elementy kierowania ruchem kolejowym na stanowisku dydaktyczno-badawczym KSR-EDU, Mi�dzynarodowa Konferencja Naukowa TRANSPORT XXI WIEKU, Stare Jabłonki, 18 – 21 wrze�nia 2007;(w:) Prace Naukowe Politechniki Warszawskiej. Seria: Transport, z. 62/2007.
[8] Kochan Andrzej: Model informacyjny systemu kierowania ruchem kolejowym, Prace naukowe Transport, Oficyna Wydawnicza Politechniki Warszawskiej 2007.
[9] Kochan Andrzej, Wawrzy�ski Wojciech,The Object-Oriented Approach To The Control Systems Reliability Modelling in Transport Procedings of 5th International Carpathian Control Conference ICCC’2004 Zakopane May 25-28,2004.
[10] Techniczna specyfikacja dla interoperacyjno�ci odnosz�cej si� do podsystemu aplikacji telematycznych dla przewozów towarowych transeuropejskiego systemu kolei konwencjonalnych. Zał�cznik do Rozporz�dzenia komisji (WE) 62/2006 z dn. 23 grudnia 2005 r. Dziennik Urz�dowy UE L13 z dn. 18.1.2006.
[11] Techniczna specyfikacja dla interoperacyjno�ci odnosz�cej si� do podsystemu „Ruch kolejowy” transeuropejskiego systemu kolei konwencjonalnych (OPE). Zał�cznik do Decyzji komisji (WE) z dn. 1 sierpnia 2006 r. Notyfikowanej jako dokument nr C(2006)3593. Dziennik Urz�dowy UE L359 z dn. 18.12.2006.
[12] Techniczna specyfikacja dla interoperacyjno�ci odnosz�cej si� do podsystemu „Ruch kolejowy” transeuropejskiego systemu kolei du�ych pr�dko�ci (OPE). Zał�cznik do Decyzji komisji (WE) z dn. 1 lutego 2008 r. Notyfikowanej jako dokument nr C(2008)3556. Dziennik Urz�dowy UE L84 z dn. 26.3.2008.
[13] Varian Mickael: Technical Specification of Interoperability. Trans-European Conventional Rail System Subsystem Telematics Applications for Passengers. Version 0.3-Draft. 2008.
THE RESEARCH OF THE TRAIN DISPATCHING SYSTEM
Abstract
The article describes selected issues related to an implementation of The Train Dispatching System (kd system). These issues come from research tasks identified for KSR Sosna as a part of research project conducted by scientific circle “Balisa”. A basic functionality of the kd system as well as different configurations was presented. New functionality resulted from TSI regulations were described. An proposition of devices location with touchscreen was presented. The research is conducted with usage of the ILTOR-2 system
Key words: railway traffic control, dispatching control, TSI, ILTOR-2.
Recenzent: Mirosława D�browa-Bajon
88