ASG-EUPOS - gik.wilsig.tu.koszalin.plgik.wilsig.tu.koszalin.pl/kdeska/STP2018/STP 14...
82
ASG-EUPOS Serwisy czasu rzeczywistego PREZENTACJĘ PRZYGOTOWALI: RAFAŁ DRZEWICKI DAWID ŚMIECHOWSKI
-
Upload
truongdien -
Category
Documents
-
view
215 -
download
0
Transcript of ASG-EUPOS - gik.wilsig.tu.koszalin.plgik.wilsig.tu.koszalin.pl/kdeska/STP2018/STP 14...

ASG-EUPOS Serwisy czasu rzeczywistego PR E Z E NTACJĘ PR Z YG OTO WAL I: R A FA Ł DR Z E WICK I DAWID ŚMIECHOWSKI

SŁOWO WSTĘPU
INFORMACJE DOSTYCZĄCE SERWISU ASG-EUPOS
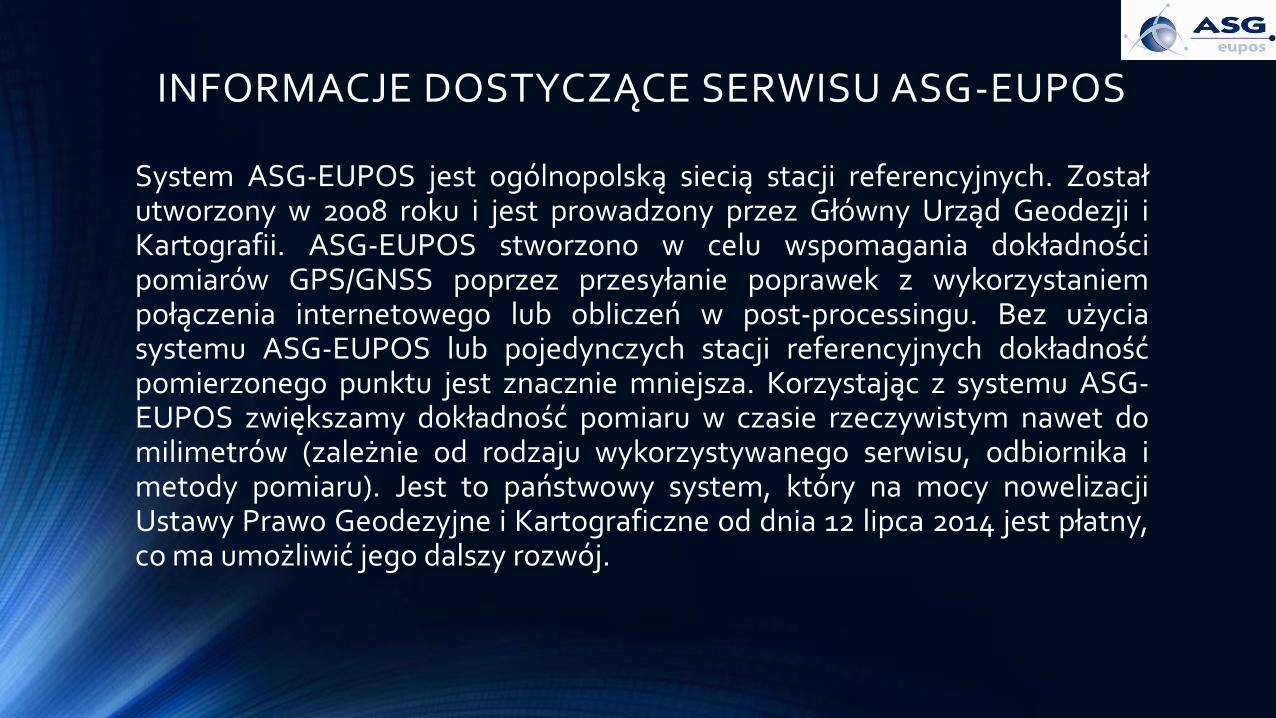
System ASG-EUPOS jest ogólnopolską siecią stacji referencyjnych. Został utworzony w 2008 roku i jest prowadzony przez Główny Urząd Geodezji i Kartografii. ASG-EUPOS stworzono w celu wspomagania dokładności pomiarów GPS/GNSS poprzez przesyłanie poprawek z wykorzystaniem połączenia internetowego lub obliczeń w post-processingu. Bez użycia systemu ASG-EUPOS lub pojedynczych stacji referencyjnych dokładność pomierzonego punktu jest znacznie mniejsza. Korzystając z systemu ASG-EUPOS zwiększamy dokładność pomiaru w czasie rzeczywistym nawet do milimetrów (zależnie od rodzaju wykorzystywanego serwisu, odbiornika i metody pomiaru). Jest to państwowy system, który na mocy nowelizacji Ustawy Prawo Geodezyjne i Kartograficzne od dnia 12 lipca 2014 jest płatny, co ma umożliwić jego dalszy rozwój.

SEGMENTY SYSTEMU ASG-EUPOS STACJE REFERENCYJNE
Jego rolą jest zbieranie danych obserwacyjnych do satelitów GNSS i przekazywanie ich w czasie rzeczywistym do Centrum Obliczeniowego. Składa się on z równomiernie rozłożonych na obszarze Polski i państw sąsiadujących stacji referencyjnych GNSS.
CENTRUM ZARZĄDZAJĄCE
Główną funkcją Centrum Zarządzającego jest wyliczenie i udostępnianie danych dla poszczególnych serwisów świadczonych przez system.Stacje referencyjne wysyłają w sposób ciągły swoje obserwacje GNSS prosto do Centrum Zarządzającego za pomocą łącz teleinformatycznych. Na podstawie tych obserwacji wyliczane są poprawki RTK/DGNSS, które następnie zostają udostępnione dla użytkowników systemu. Cały proces obliczeń i dostarczenia danych korekcyjnych odbywa się automatycznie. W tym przypadku pracownicy Centrum Zarządzania są odpowiedzialni za ciągłość obserwacji satelitarnych oraz wykonywanie testów poprawności działania całego systemu.Bezpośrednio z Centrum Zarządzającego użytkownik może pobrać pliki obserwacyjne z poszczególnych stacji referencyjnych systemu ASG-EUPOS lub przesłać własne pliki obserwacyjne w celu uzyskania precyzyjnej pozycji mierzonych szczegółów terenowych.Poza zapewnieniem usług związanych z wyznaczaniem pozycji Centrum Zarządzające pełni funkcję dotyczącą konserwacji państwowego układu odniesienia. Cotygodniowe wyliczenie współrzędnych stacji referencyjnych pozwala na bieżącą kontrolę stałości stacji, które definiują ten układ.
UŻYTKOWNICY
Prócz stacji referencyjnych i centrum obliczeniowego w skład struktury systemu ASG-EUPOS wpisują się także użytkownicy.Użytkownicy systemu mają możliwość wyboru sprzętu pomiarowego z szerokiego wachlarza urządzeń dostępnych na rynku. Poszczególne serwisy świadczone przez system ASG-EUPOS mogą być wykorzystane zarówno przez jedno, jak i dwuczęstotliwościowe odbiorniki GPS wyposażone w moduł komunikacyjny. Rozwiązania przyjęte w systemie dają możliwość korzystania z niego także użytkownikom nie posiadającym kosztownej aparatury pomiarowej, a wyposażonym przykładowo w prosty odbiornik turystyczny GPS.Dzięki ciągłej dostępności na obszarze całej Polski oferowanych serwisów użytkownik, który zdecyduje się na korzystanie z systemu ASG-EUPOS dysponuje możliwością precyzyjnego określenia swojej pozycji niezależnie od miejsca i czasu.

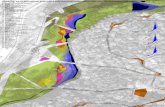
STACJE REFERENCYJNE ASG-EUPOS
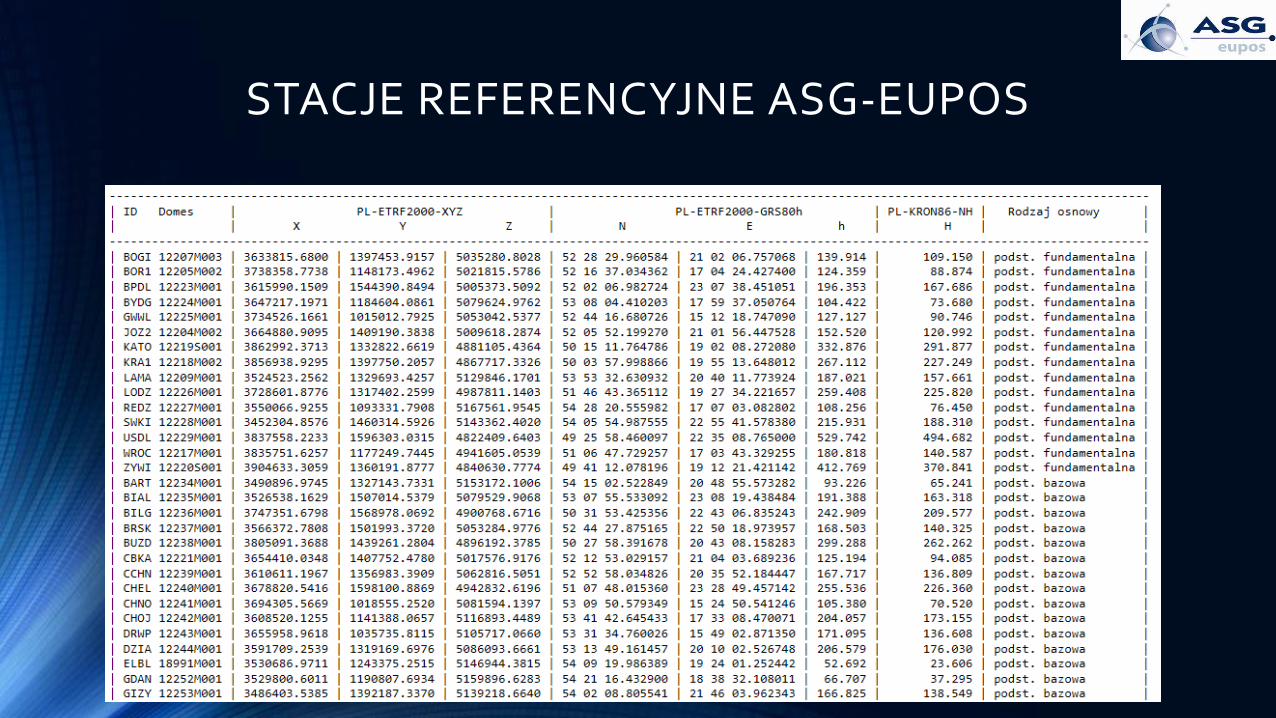
STACJE REFERENCYJNE ASG-EUPOS
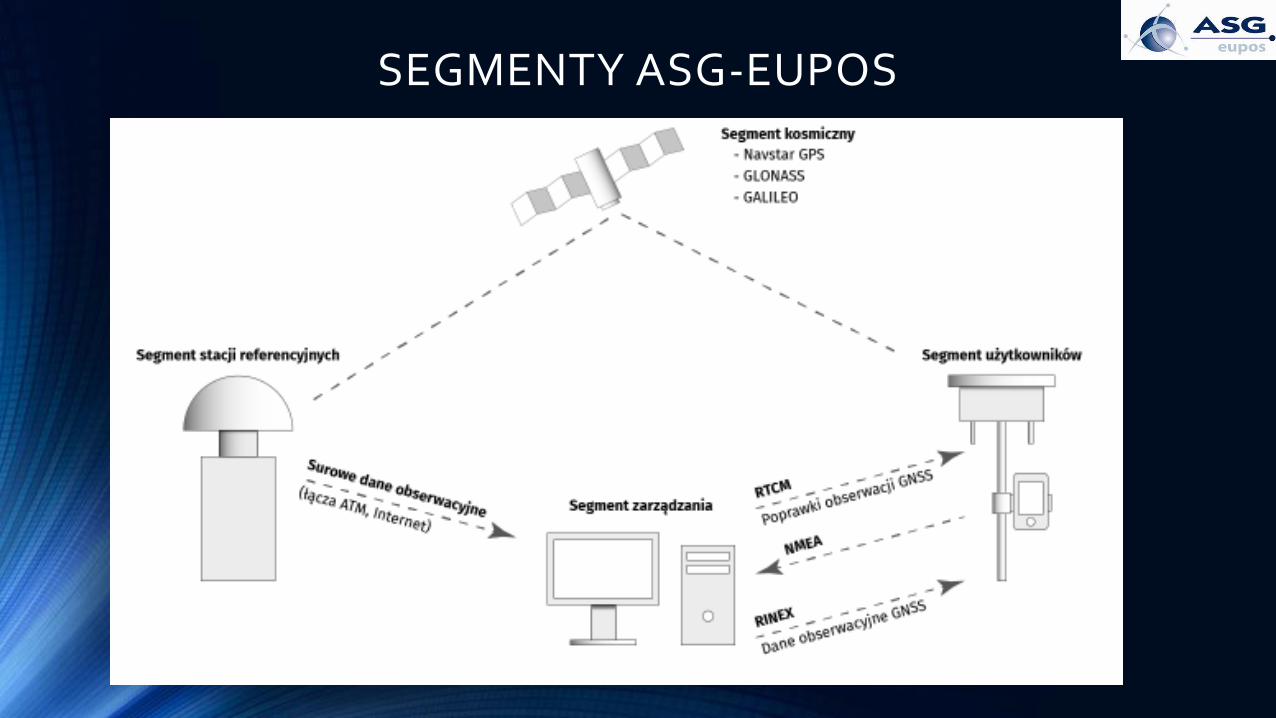
SEGMENTY ASG-EUPOS

USŁUGI SYSTEMU ASG-EUPOS
System ASG-EUPOS udostępnia 2 typy usług - poprawki otrzymywane są w czasie rzeczywistym lub w warunkach kameralnych po zakończonym
dniu pomiarowym.
1) SERWISY CZASU RZECZYWISTEGO:
• NAWGEO;
• KODGIS;
• NAWGIS;
2) SERWISY POST-PROCESSINGU:
• POZGEO;
• POZGEO D.

CHARAKTERYSTYKA POSZCZEGÓLNYCH SERWISÓW
SERWISY CZASU RZECZYWISTEGO
Serwisy te pozwalają na zwiększenie dokładności pomiaru w czasie rzeczywistym bezpośrednio w terenie dzięki pobieraniu poprawek przez Internet. Wykorzystując stacje obliczeniowe i połączenie GSM/GPRS lub Wi-Fi użytkownik otrzymuje korekty obserwacyjne do wykonywanych pomiarów, zwiększając dokładność odczytywanej pozycji. Dostępne są 3 serwisy czasu rzeczywistego, zróżnicowane według typu odbiornika i wymaganych dokładności pomiaru.

SERWISY CZASU RZECZYWISTEGO
Stacje referencyjne połączono za pomocą szybkich łączy transmisji danych zbieranych w interwałach 1-sekundowych z Centrum Obliczeniowym. Serwer obliczeniowy wyposażony w moduł opracowania VRS pobiera obserwacje z udostępnionych stacji i buduje w czasie prawie rzeczywistym lokalną bazę korekcji obszaru objętego siecią. Użytkownik wyposażony w moduł komunikacji w swoim odbiorniku łączy się z segmentem obliczeniowym i przekazuje swoje położenie uzyskane z systemu GPS (dokładność określenia nawet 5 m). Na podstawie przekazanej pozycji , segment obliczeniowy wykorzystując informacje z lokalnej bazy korekcji, tworzy zestaw danych korekcyjnych, wyliczonych na wirtualną stację referencyjną położoną w odległości około 1 m od zgłoszonego położenia odbiornika użytkownika. Zestaw ten przekazywany jest do odbiornika użytkownika. Przy zastosowaniu tej technologii, poprawki korekcyjne pozwalają na określanie położenia punktu z dokładnością kilku centymetrów nawet przy odległościach 70 km od stacji referencyjnej.

NAWGEO

SERWIS NAWGEO
NAWGEO to podstawowy serwis systemu ASG-EUPOS udostępniający dane korekcyjne do pomiarów w czasie rzeczywistym RTK i RTN. Umożliwia uzyskiwanie najwyższych dokładności zarówno w pomiarach kinematycznych, jak i określaniu położenia obiektów statycznych. Dzięki wielu dostępnym formatom danych korekcyjnych, serwis NAWGEO pozwala użytkownikowi wykorzystać szeroką gamę sprzętu pomiarowego dostępnego na rynku. Ze względu na możliwą do uzyskania wysoką dokładność pomiarów, serwis NAWGEO dedykowany jest przede wszystkim pomiarom geodezyjnym.
SERWIS NAWGEO
Najwyższe dokładności w pomiarach satelitarnych w czasie rzeczywistym można uzyskać wykorzystując dostępne w serwisie NAWGEO sieciowe rozwiązania RTN (ang. Real-Time Network). Ich przewaga nad rozwiązaniami opartymi o pojedynczą stację referencyjną (RTK, ang. Real-Time Kinematics) wynika z możliwości lepszego modelowania systematycznych błędów związanych m.in. z pracą zegarów atomowych na satelitach oraz opóźnień związanych z propagacją sygnału w atmosferze. Co za tym idzie, wykorzystanie sieciowych danych RTN umożliwia powtarzalność wyznaczeń współrzędnych bez względu na odległość odbiornika od fizycznej stacji referencyjnej. Należy pamiętać, że przy wykorzystaniu danych korekcyjnych z pojedynczej stacji referencyjnej błąd wyznaczenia współrzędnych wzrasta wraz ze wzrostem odległości od stacji, z której pochodzą dane. Dlatego zalecane jest stosowanie strumieni sieciowych w pomiarach RTK wszędzie tam gdzie jest to tylko możliwe.
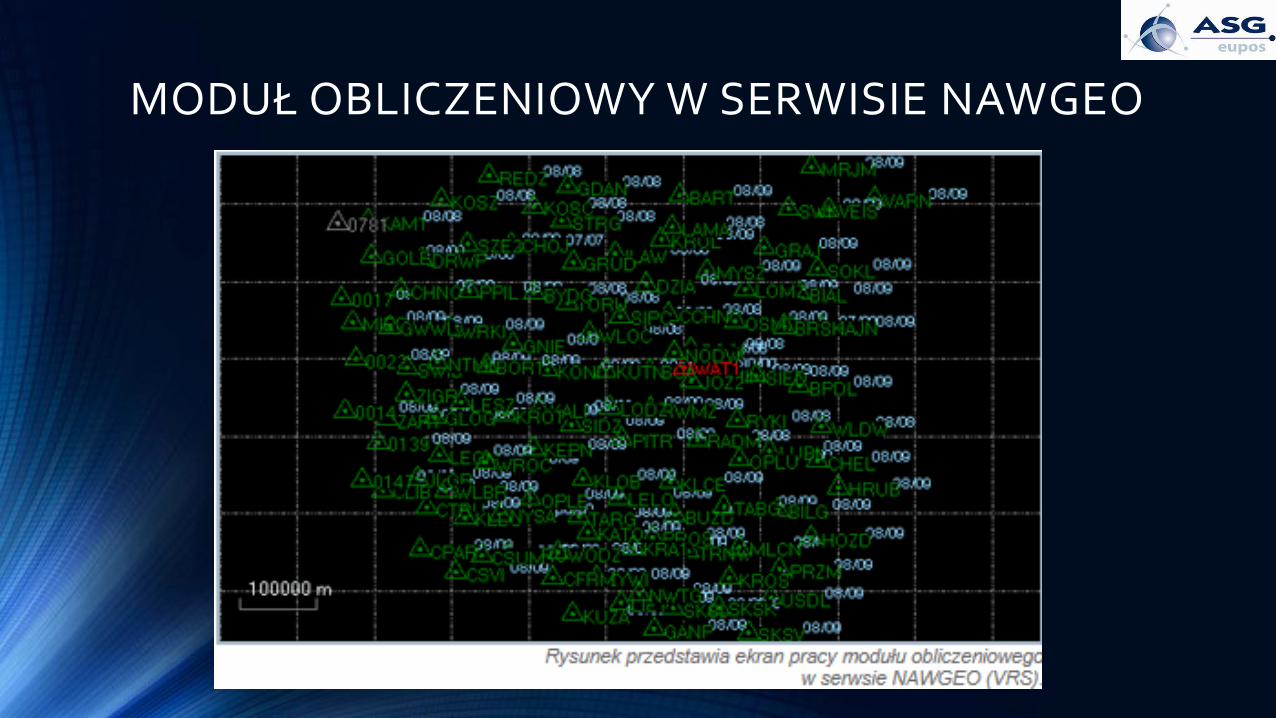
MODUŁ OBLICZENIOWY W SERWISIE NAWGEO
SERWIS NAWGEO
W systemie ASG-EUPOS udostępniane są trzy rodzaje rozwiązań sieciowych: VRS (ang. Virtual Reference Station), MAC (ang. Master and Auxiliary Concept) oraz FKP (niem. Flächenkorrekturparameter). Dla użytkownika nie jest istotne, z którego rozwiązania korzysta ponieważ informacje w nich zawarte generowane są przez to samo oprogramowanie i dają bardzo zbliżone rezultaty. Zaleca się użytkownikom, przeprowadzenie pomiarów testowych w oparciu o udostępniane strumienie, w celu wybrania odpowiedniego rozwiązania. Testy przeprowadzone przez wykonawcę systemu oraz zewnętrzne podmioty potwierdzają, że w optymalnych warunkach pomiarowych wszystkie rodzaje danych korekcyjnych pozwalają osiągnąć powtarzalność wyznaczeń w granicach ±0,03 m w poziomie i ±0,05 m w pionie.

SERWIS NAWGEO
Pomiar polega na wysłaniu przez odbiorniki przybliżonego położenia przez wiadomość NMEA GGA do systemu obliczeniowego i otrzymaniu poprawek dla mierzonego terenu. Poprawki przesyłane są protokołem NTRIP w formacie RTCM lub CMR. Wybór formatu zależny jest od producenta odbiornika (dla większości jest to RTCM). W zależności od zakresu pomiarów dostęp możliwy jest 2 metodami: RTN i RTK .W miarę możliwości zalecane jest wykorzystywanie RTN, które daje lepsze modelowanie błędów dla mierzonego obszaru. Podczas połączenia z pojedynczą stacją (RTK) należy pamiętać, że błąd pomiaru rośnie wraz z odległością od stacji i wynosi średnio 1mm/km.
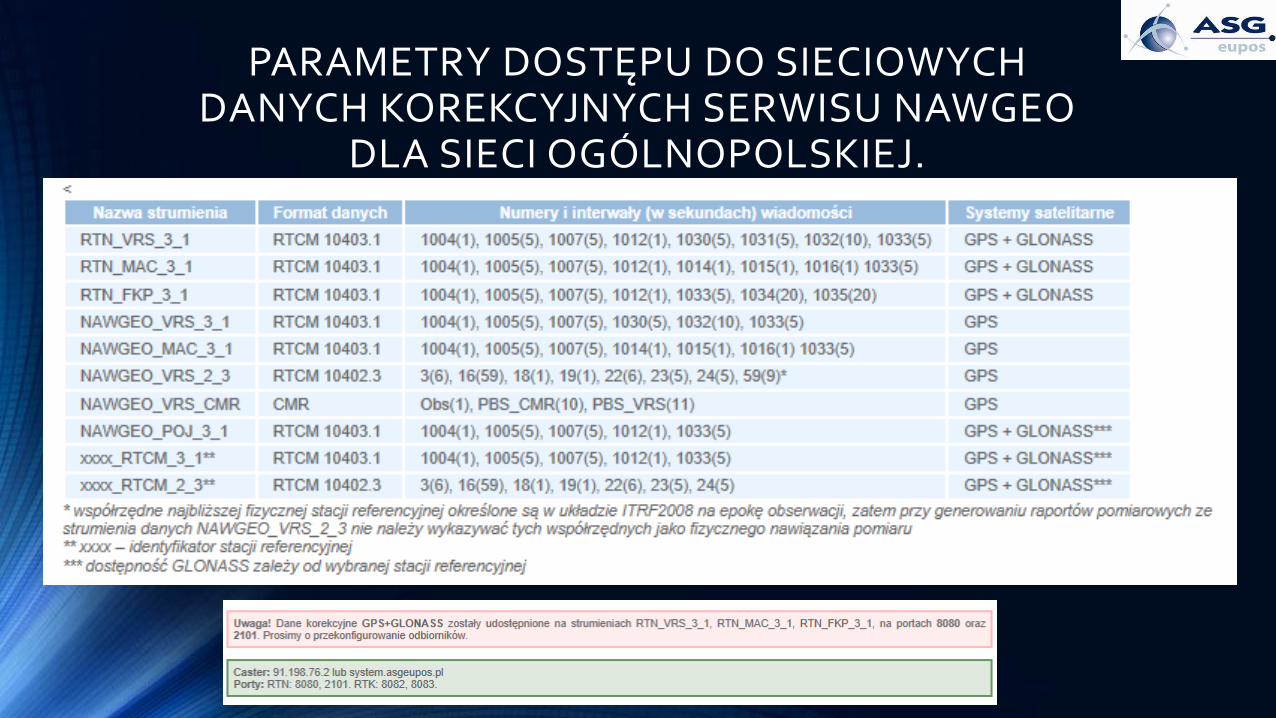
PARAMETRY DOSTĘPU DO SIECIOWYCH DANYCH KOREKCYJNYCH SERWISU NAWGEO
DLA SIECI OGÓLNOPOLSKIEJ.

SERWIS NAWGEO
W serwisie NAWGEO, poza rozwiązaniami sieciowymi, dostępne są także tradycyjne korekty RTK z pojedynczej, wybranej przez użytkownika stacji referencyjnej. Nie wymaga to od użytkownika przesłania danych o jego pozycji i jest stosowane w starszych typach odbiorników GNSS. Komunikacja użytkownika z siecią ASG-EUPOS odbywa się z wykorzystaniem protokołu NTRIP. Dane z pojedynczych stacji referencyjnych dostępne są w systemie ASG-EUPOS wyłącznie dla stacji położonych na terenie kraju.
Po zalogowaniu się na serwerze systemu (system.asgeupos.pl) użytkownik wybiera odpowiadający mu strumień danych korekcyjnych.

FORMATY DANYCH Z PODZIAŁEM NA PORTY, NA KTÓRYCH SĄ UDOSTĘPNIONE
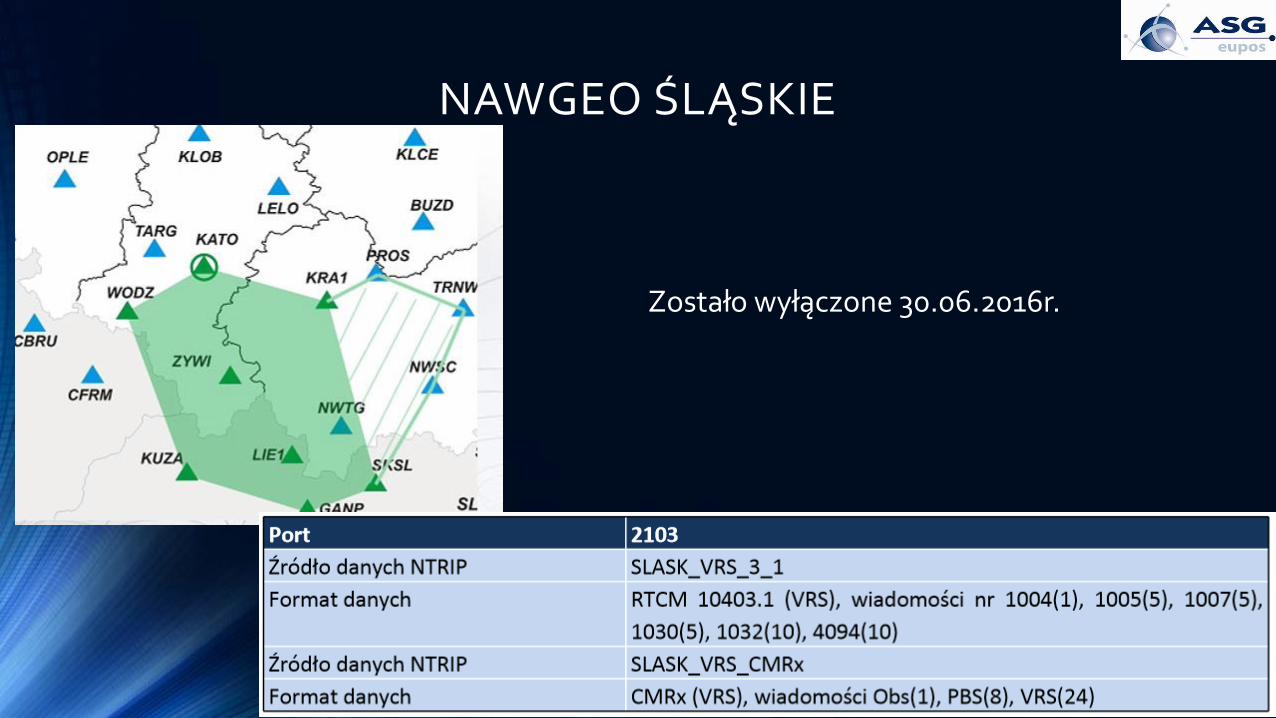
NAWGEO ŚLĄSKIE
Zostało wyłączone 30.06.2016r.
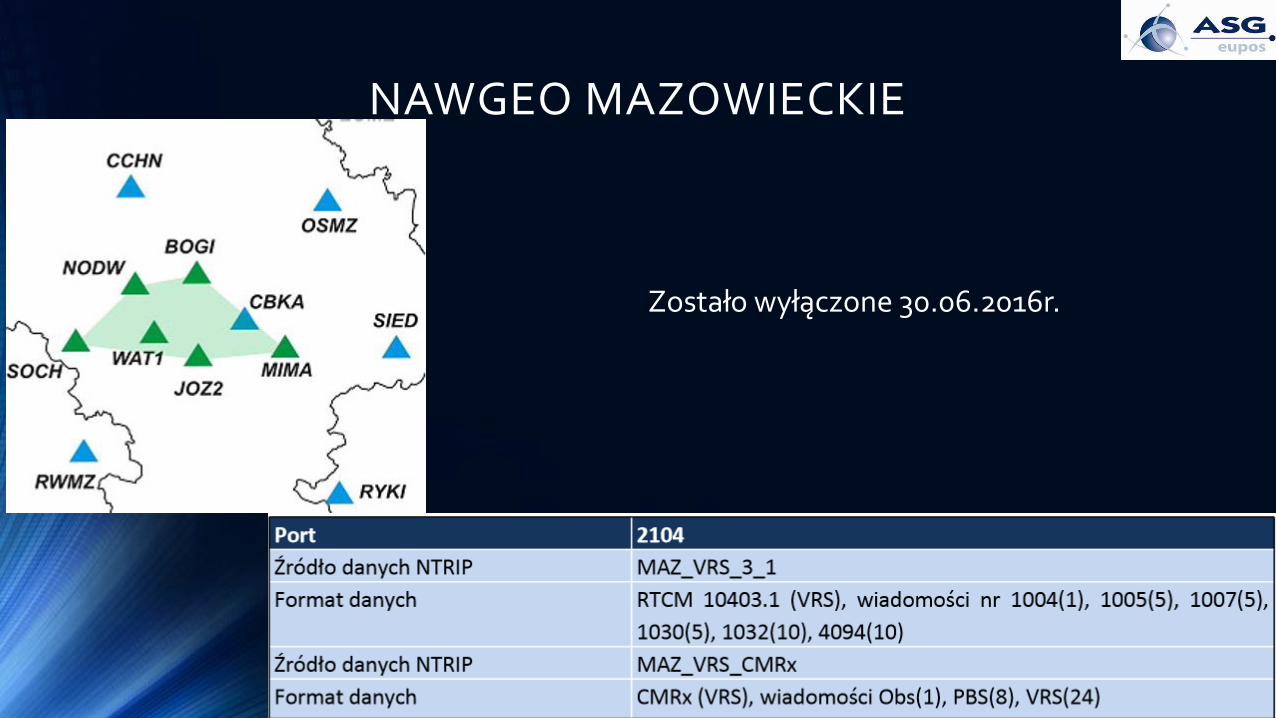
NAWGEO MAZOWIECKIE
Zostało wyłączone 30.06.2016r.

KODGIS

KODGIS
Serwis KODGIS przeznaczony jest głównie do wykonywania pomiarów na potrzeby budowy lub aktualizacji systemów informacji przestrzennej. Dla tego typu systemów wyznaczenie współrzędnych z dokładnością kilkudziesięciu centymetrów jest w zupełności wystarczające. Serwis KODGIS może być również wykorzystywany do wspomagania służb ratowniczych, w drogownictwie, archeologii, rolnictwie, leśnictwie, energetyce, telekomunikacji, turystyce i rekreacji, automatycznej nawigacji, itp. Wszędzie tam użytkownicy mogą stosować tańsze kodowe odbiorniki jednoczęstotliwościowe i korzystać z poprawek serwisu KODGIS, celem podniesienia dokładności wyznaczanych współrzędnych.

KODGIS
Wykorzystując dane korekcyjne serwisu KODGIS można uzyskać powtarzalność wyznaczeń współrzędnych nie gorszą niż ±0,25 m w poziomie, co sprawia że wiele firm zajmujących się opracowaniami kartograficznymi i GIS będzie mogło wykorzystać ten serwis do wykonania niezbędnych pomiarów. Żeby system ASG-EUPOS mógł wygenerować dane korekcyjne dla danego użytkownika o takiej dokładności wymagane jest przesłanie przybliżonej pozycji odbiornika w formacie NMEA GGA. Podobnie jak w przypadku RTK system generuje dane korekcyjne właściwe dla danego rejonu i wysyła je do odbiornika użytkownika w formacie RTCM. Różnica polega na rodzaju danych zawartych w wiadomościach RTCM, które w przypadku serwisu KODGIS zawierają jedynie obserwacje kodowe.

KODGIS Poniższa tabela przedstawia numery i interwały wiadomości RTCM wysyłanych do użytkownika serwisu KODGIS podczas wykonywania pomiaru.
• Msg. 1 - obserwacje kodowe GPS
• Msg. 31 - obserwacje kodowe GLONASS
• Msg. 3 - informacje dot. stacji referencyjnej
• Msg. 59 - dodatkowe informacje dot. VRS
Dane przesyłane są protokołem NTRIP, wymagającym od użytkownika autoryzacji poprzez podanie loginu i hasła. Dane do logowania w serwisach ASG-EUPOS użytkownik otrzymuje po zarejestrowaniu się w systemie.

NAWGIS
NAWGIS Użytkownicy wymagający pozycjonowania z dokładnością do kilku metrów (do ok. 3 m), wyposażeni w odbiorniki GNSS mogące odbierać przynajmniej poprawki obserwacyjne DGNSS w formacie RTCM, będą zainteresowani serwisem NAWGIS. Odbiór poprawek DGNSS w tym serwisie nie wymaga dwukierunkowej komunikacji z Centrum Zarządzającym, tj. w przypadku dokładniejszego serwisu KODGIS. Nie jest wymagane przesłanie do systemu przybliżonej pozycji odbiornika, zatem z serwisu NAWGIS korzystać mogą użytkownicy wyposażeni w jeszcze prostsze odbiorniki kodowe. Poprawki DGNSS wyznaczane są, w zależności od wymagań, z północnej lub południowej podsieci stacji referencyjnych dla jej punktu środkowego i przesyłane w formacie RTCM przez Internet protokołem NTRIP.
Podobnie jak w przypadku poprawek RTK z pojedynczych stacji referencyjnych system generuje poprawkę właściwą dla danej części kraju (północnej lub południowej) i wysyła ją do odbiornika użytkownika w formacie RTCM. Różnica polega na rodzaju danych zawartych w wiadomościach RTCM, które w przypadku serwisu NAWGIS zawierają jedynie poprawki kodowe.

NAWGIS
Jest to serwis, w ramach którego udostępniane są poprawki do obserwacji kodowych (podobnie jak w serwisie KODGIS) z tą różnicą, że odbiornik nie musi wysyłać do centrum zarządzającego swojej pozycji początkowej. W konsekwencji dokładności współrzędnych uzyskiwanych w terenie zależą wprost proporcjonalnie od odległości do punktu, dla którego generowane są poprawki w danym źródle (NAWGIS_Polnoc: 53,2° N, 18,0° E, NAWGIS_Poludnie: 51,2° N, 20,2° E). Dodatkowo, serwis NAWGIS udostępnia jedynie poprawki dla systemu GPS, zatem korzysta z formatu RTCM 10402.1, kompatybilnego z większą liczbą urządzeń dostępnych na rynku. Poprawki przeznaczone są dla prostych kodowych odbiorników, które mogą pracować w trybie DGNSS. Często ograniczeniem do korzystania z systemu ASG-EUPOS jest konieczność komunikacji za pomocą protokołu NTRIP, który jest wymagany do połączeń z serwisami.

NAWGIS
Poniższa tabela przedstawia numery i interwały wiadomości RTCM wysyłanych do użytkownika serwisu NAWGIS podczas wykonywania pomiaru.
• Msg. 1 - obserwacje kodowe GPS
• Msg. 3 - informacje dot. stacji referencyjnej
• Msg. 59 - dodatkowe informacje dot. VRS
• Dane przesyłane są protokołem NTRIP, wymagającym od użytkownika autoryzacji poprzez podanie loginu i hasła. Dane do logowania w serwisach ASG-EUPOS użytkownik otrzymuje po zarejestrowaniu się w systemie.

POMIARY W CZASIE RZECZYWISTYM

POMIARY W CZASIE RZECZYWISTYM
W celu rozwiązania przez odbiornik GNSS zadania pomiarowego jakim jest wyznaczenie współrzędnych musi on śledzić co najmniej 4 „zdrowe” satelity GNSS. Związane jest to z faktem, że oprócz samych współrzędnych niewiadomą w równaniach obserwacyjnych jest tzw. poprawka zegara odbiornika umożliwiająca synchronizację czasu w odbiorniku z nominalnym czasem danego systemu GNSS. Taki, podstawowy tryb pomiaru nazywany jest autonomicznym. W zależności od śledzonego sygnału pomiarowego, czynników środowiskowych i klasy sprzętu dokładność takiego pomiaru waha się w granicach od kilku decymetrów do kilku (w skrajnie niekorzystnych warunkach obserwacji kilkunastu) metrów.
POMIARY W CZASIE RZECZYWISTYM
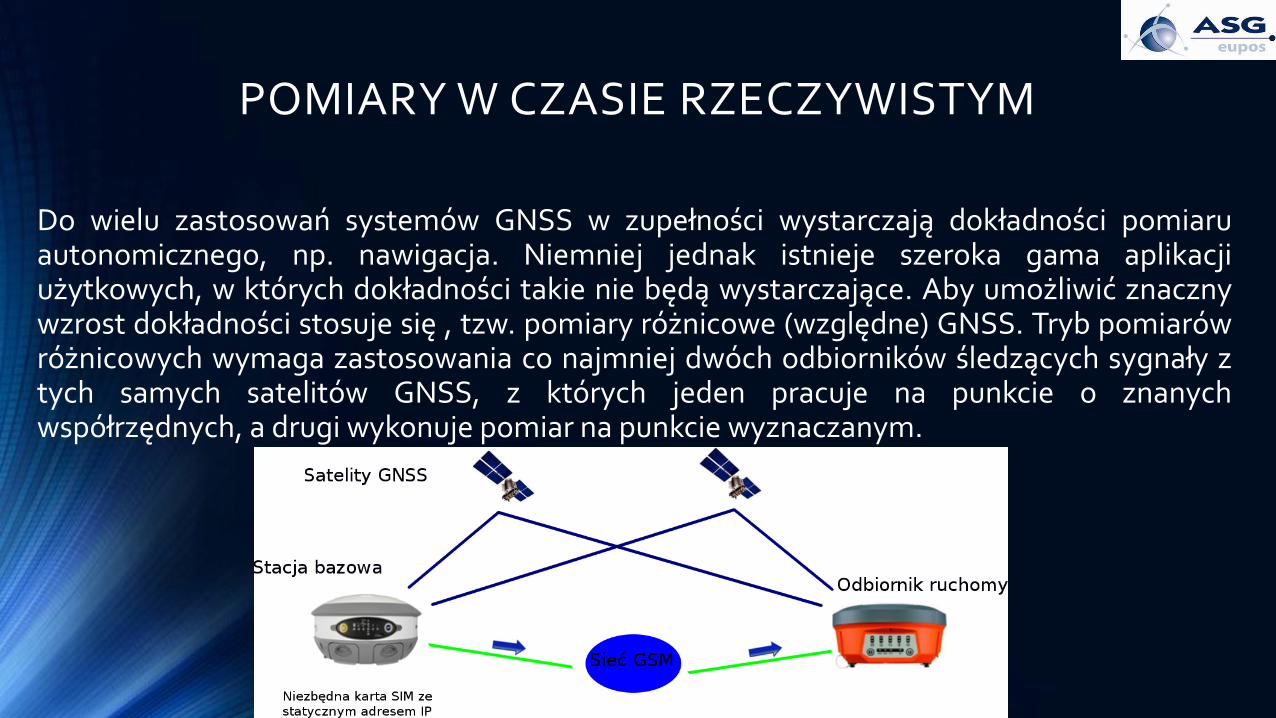
Do wielu zastosowań systemów GNSS w zupełności wystarczają dokładności pomiaru autonomicznego, np. nawigacja. Niemniej jednak istnieje szeroka gama aplikacji użytkowych, w których dokładności takie nie będą wystarczające. Aby umożliwić znaczny wzrost dokładności stosuje się , tzw. pomiary różnicowe (względne) GNSS. Tryb pomiarów różnicowych wymaga zastosowania co najmniej dwóch odbiorników śledzących sygnały z tych samych satelitów GNSS, z których jeden pracuje na punkcie o znanych współrzędnych, a drugi wykonuje pomiar na punkcie wyznaczanym.

POMIARY W CZASIE RZECZYWISTYM
W przypadku, gdy odbiorniki znajdują się w niewielkiej odległości od siebie można założyć, że sygnał satelitarny docierający do każdego z odbiorników jest zakłócany niemal identycznie, a co za tym idzie błędy pomiarowe również są identyczne. Dzięki uwzględnieniu poprawionych obserwacji bądź poprawek do obserwacji obliczonych na punkcie o znanych współrzędnych na punkcie wyznaczanym redukowane są błędy śledzonego sygnału satelitarnego, ale należy mieć na uwadze, że na punkt wyznaczany przenoszone są błędy pomiaru na punkcie o znanych współrzędnych takie jak błąd centrowania anteny GNSS, błąd współrzędnych punktu, błędy wielotorowości sygnału GNSS, błędy pochodzące z niekorzystnych warunków pomiaru (przeszkody terenowe, wpływ promieniowania elektromagnetycznego) oraz błędy pochodzące od samego odbiornika. Z tego powodu odbiorniki instalowane na punktach o znanych współrzędnych (punkty odniesienia) bardzo często mają wymuszone centrowanie, a jako punkty odniesienia powinny być wybierane miejsca o doskonałych warunkach do pomiaru GNSS pozbawione zakłóceń elekromagnetycznych oraz przeszkód terenowych.

POMIARY W CZASIE RZECZYWISTYM
Ze względu na występowanie lub nie ruchu anteny podczas pomiaru, różnicowe pomiary GNSS możemy podzielić na dwie grupy: pomiary kinematyczne oraz pomiary statyczne.
TECHNOLOGIE POMIARÓW KINEMATYCZNYCH
Techniki pomiarów w czasie rzeczywistym to szczególny typ pomiarów różnicowych, w którym współrzędne punktu wyznaczanego są dostępne bezpośrednio w terenie w każdej epoce pomiarowej. Żeby możliwe było ciągłe wyznaczanie pozycji z wysoką dokładnością konieczne jest zapewnienie nieprzerwanej komunikacji pomiędzy odbiornikiem ustawionym na punkcie o znanych współrzędnych (lub z siecią takich odbiorników), a odbiornikiem na punkcie wyznaczanym. Odbiorniki umieszczone na punktach o znanych współrzędnych najczęściej nazywane są odbiornikami (stacjami) bazowymi lub referencyjnymi, a stacje pracujące w trybie ciągłym noszą również nazwę stacji permanentnych. Odbiorniki, które wykonują pomiar na punkcie wyznaczanym nazywane są odbiornikami ruchomymi lub mobilnymi albo określane są angielskojęzycznym terminem „rover”. Ze względu na wykorzystywany do pomiaru sygnał GNSS, w różnicowych pomiarach w czasie rzeczywistym wyróżniamy techniki RTK (ang. Real-Time Kinematic) oraz DGNSS (ang. Differential GNSS).

TECHNOLOGIE POMIARÓW KINEMATYCZNYCH

TECHNIKA REAL-TIME KINEMATIC DEFINICJA PRAWNA
Pomiarowa technika kinematyczna RTK to pomiar wykonywany przy użyciu zestawu pomiarowego, złożonego z odbiornika stacjonarnego, stanowiącego stację referencyjną, oraz jednego lub większej liczby odbiorników ruchomych, które mają zapewnioną bezpośrednią łączność z odbiornikiem stacjonarnym, względem którego jest wyznaczana w czasie rzeczywistym pozycja odbiorników ruchomych, na podstawie danych obserwacyjnych lub poprawek do danych obserwacyjnych przesyłanych ze stacji referencyjnej do tych odbiorników.
Rozporządzenie Ministra Spraw Wewnętrznych i Administracji z dnia 9 listopada 2011r. w sprawie standardów technicznych wykonywania geodezyjnych pomiarów sytuacyjnych i wysokościowych oraz opracowywania i przekazywania wyników tych pomiarów do państwowego zasobu geodezyjnego i kartograficznego (Dz. U. 2011r. nr 263 poz. 1572)
TECHNIKA REAL-TIME KINEMATIC CHARAKTERYSTYKA DZIAŁANIA
Odbiornik ruchomy otrzymuje ze stacji referencyjnej obserwacje fazowe oraz współrzędne centrum fazowego anteny, do którego odniesione są te obserwacje. Następnie tworzone są kombinacje liniowe obserwacji z wielu częstotliwości (np. widelane, narrow-lane lub iono-free) i odejmowane od siebie (różnice dwóch obserwacji dla tego samego satelity ze stacji referencyjnej i odbiornika ruchomego lub dla tego samego odbiornika różnica obserwacji do 2 satelitów). Dwukrotne zróżnicowanie obserwacji tworzy tzw. podwójne różnice, które są podstawą do obliczeń, tj. wyznaczenia tzw. nieoznaczoności fazy i rozwiązania zadania pomiarowego (wyznaczenia współrzędnych punktu i poprawki zegara odbiornika). Prawidłowe wyznaczenie nieoznaczoności fazy przez odbiornik ruchomy oznacza, że od tego momentu dokładność pomiaru odległości pomiędzy satelitą GNSS i roverem mieści się w granicach dokładności wyznaczenia fazy sygnału (zwykle ok. kilku cm). Stan obliczeń, gdy dla co najmniej 5 satelitów odbiornik ruchomy wyznaczy nieoznaczoność fazy, określany jest zazwyczaj jako fixed lub tryb precyzyjny. Warto pamiętać, że w technice RTK (lub RTN) prawidłowość wyznaczenia nieoznaczoności fazy skontrolować możemy jedynie na punkcie o znanych, prawidłowych współrzędnych (pomiar kontrolny na dwóch punktach osnowy geodezyjnej).
TECHNIKA REAL-TIME KINEMATIC CHARAKTERYSTYKA DZIAŁANIA
Rozwiązanie RTK sprawdza się, jeśli wykonujemy pomiary w niewielkiej odległości od stacji referencyjnej (optymalnie do 20 km, maksymalnie do 35-40 km. Należy zwrócić uwagę czy wybrana stacja referencyjna udostępnia dane korekcyjne GPS+GLONASS, czy tylko GPS. Jeśli posiadamy odbiornik obsługujący jedynie sygnał GPS, wybieramy po prostu najbliższą stację. Jeżeli posiadamy odbiornik obsługujący sygnały GPS+GLONASS i chcemy odbierać poprawki dla obu systemów, z okolicznych stacji wybieramy tą obsługującą GPS+GLONASS (nawet jeśli jakieś stacje GPS są bliżej). Ma to sens w przypadku gdy stacja GPS+GLONASS znajduje się w niewielkiej odległości (maksymalnie 40 km). Jeśli w okolicy nie ma takiej stacji, to rozsądniejsza będzie rezygnacja z poprawek dla GLONASSa i wykorzystanie jedynie poprawek dla GPS
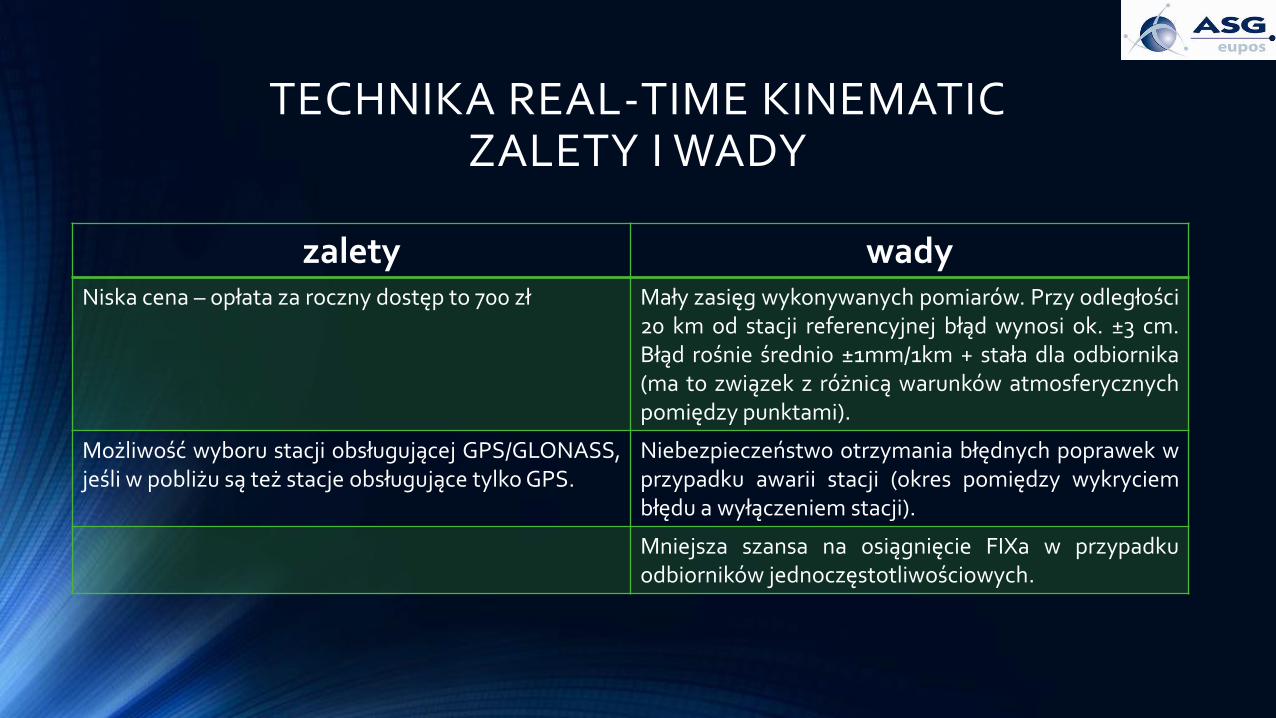
TECHNIKA REAL-TIME KINEMATIC ZALETY I WADY
zalety wady Niska cena – opłata za roczny dostęp to 700 zł Mały zasięg wykonywanych pomiarów. Przy odległości
20 km od stacji referencyjnej błąd wynosi ok. ±3 cm. Błąd rośnie średnio ±1mm/1km + stała dla odbiornika (ma to związek z różnicą warunków atmosferycznych pomiędzy punktami).
Możliwość wyboru stacji obsługującej GPS/GLONASS, jeśli w pobliżu są też stacje obsługujące tylko GPS.
Niebezpieczeństwo otrzymania błędnych poprawek w przypadku awarii stacji (okres pomiędzy wykryciem błędu a wyłączeniem stacji).
Mniejsza szansa na osiągnięcie FIXa w przypadku odbiorników jednoczęstotliwościowych.
TECHNIKA REAL-TIME KINEMATIC WYTYCZNE TECHNICZNE G-1.12
Link

TECHNIKA DIFFERENTIAL GNSS
Technika DGNSS wykorzystuje stację bazową (referencyjną), na której prowadzone są ciągle lub okresowe obserwacje kodowe (pomiary pseudoodległości) do satelitów na przynajmniej jednej częstotliwości pomiarowej (np. GPS L1). Odbiornik satelitarny stacji referencyjnej dysponuje informacją o współrzędnych centrum fazowego anteny stacji, a także, na podstawie almanachu satelitarnego, współrzędnymi (efemerydami) satelitów na orbicie. Możliwe jest zatem wyznaczenie – dla uproszczenia prawidłowej, bezbłędnej – odległości satelita-stacja referencyjna. Z różnicy zaobserwowanych i wyznaczonych ze współrzędnych pseudoodległości powstają residua, osobno dla każdego satelity i sygnału pomiarowego w danej epoce pomiarowej. Wysłanie tych residuów w postaci poprawek DGNSS umożliwia bieżące poprawianie pomiarów wykonywanych przez każdy inny odbiornik ruchomy (rover) znajdujący się w pobliżu stacji referencyjnej. Wraz ze wzrostem odległości do stacji referencyjnej założenie identyczności sygnałów odbieranych przez obydwa odbiorniki – stacjonarny i ruchomy coraz bardziej odbiega od rzeczywistości, zatem rosną błędy określenia pseudoodległości.
TECHNIKA DIFFERENTIAL GNSS
W zależności od odległości do stacji referencyjnej, a także parametrów samych odbiorników (klasy sprzętu pomiarowego), liczby śledzonych sygnałów pomiarowych, geometrii konstelacji satelitarnej i lokalnych czynników środowiskowych dokładność techniki DGNSS mieści się w granicach od kilkunastu cm do ok. 1 m. Należy jednak pamiętać, że przy znacznych odległościach od stacji referencyjnej (rzędu kilkuset km) dokładność pomiaru DGNSS może być nawet niższa od pomiaru autonomicznego.

TECHNIKA DIFFERENTIAL GNSS WYTYCZNE TECHNICZNE G-1.12
TECHNIKA REAL-TIME NETWORK DEFINICJA PRAWNA
Pomiarowa technika kinematyczna RTN to pomiar wykonywany przy użyciu odbiorników stacjonarnych, stanowiących sieć stacji referencyjnych, oraz jednego lub większej liczby odbiorników ruchomych, które mają zapewnioną bezpośrednią łączność ze stacjami referencyjnymi, względem których jest wyznaczana w czasie rzeczywistym pozycja odbiorników ruchomych, na podstawie danych obserwacyjnych lub poprawek do danych obserwacyjnych przesyłanych ze stacji referencyjnej do tych odbiorników za pośrednictwem ośrodka obliczeniowego.
Rozporządzenie Ministra Spraw Wewnętrznych i Administracji z dnia 9 listopada 2011r. w sprawie standardów technicznych wykonywania geodezyjnych pomiarów sytuacyjnych i wysokościowych oraz opracowywania i przekazywania wyników tych pomiarów do państwowego zasobu geodezyjnego i kartograficznego (Dz. U. 2011r. nr 263 poz. 1572)

TECHNIKA REAL-TIME NETWORK CHARAKTERYSTYKA DZIAŁANIA
Metoda pomiaru RTN (Real Time Network) jest bardzo podobna do pomiaru RTK przy zachowaniu tej samej dokładności pomiaru, jednak do obliczenia poprawek jest wykorzystywane kilka stacji referencyjnych. Zastosowane są poprawki powierzchniowe VRS (ang. Virtual Reference Station).
Po otrzymaniu przybliżonej pozycji naszego odbiornika GNSS przez wiadomość NMEA GGA, system obliczeniowy tworzy wirtualną stację referencyjną w pobliżu odbiornika i dla niej wylicza poprawki, które są następnie przesyłane tak jakby pochodziły z pojedynczej stacji referencyjnej. Aby dokonać obliczeń system obliczeniowy pobiera i interpoluje poprawki z kilku otaczających użytkownika fizycznych stacji referencyjnych.
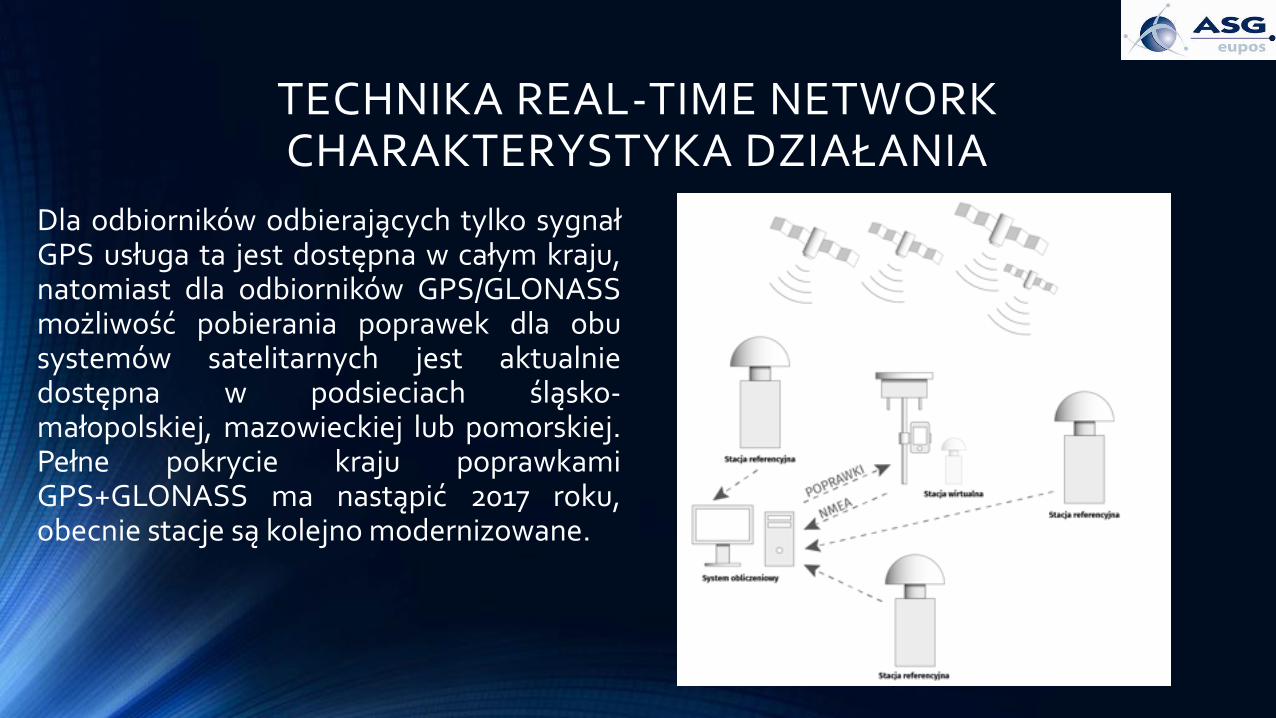
TECHNIKA REAL-TIME NETWORK CHARAKTERYSTYKA DZIAŁANIA
Dla odbiorników odbierających tylko sygnał GPS usługa ta jest dostępna w całym kraju, natomiast dla odbiorników GPS/GLONASS możliwość pobierania poprawek dla obu systemów satelitarnych jest aktualnie dostępna w podsieciach śląsko-małopolskiej, mazowieckiej lub pomorskiej. Pełne pokrycie kraju poprawkami GPS+GLONASS ma nastąpić 2017 roku, obecnie stacje są kolejno modernizowane.

TECHNIKA REAL-TIME NETWORK ZALETY I WADY
zalety wady Zasięg pomiarowy dostępny na terenie całego kraju z jednakową dokładnością wyznaczenia pozycji.
Wysoka cena - opłata za roczny dostęp to 1500 zł
Brak możliwości pobierania błędnych poprawek w przypadku awarii jednej ze stacji (algorytm obliczeniowy odrzuci niewłaściwe poprawki).
Metoda nie wszędzie dostępna dla poprawek GPS+GLONASS.
Większa szansa na osiągnięcie FIXa w przypadku odbiorników jednoczęstotliwościowych.
TYPY ROZWIĄZAŃ RTN
Istnieje wiele podejść do sposobu obliczania zestawu danych RTN, które są transmitowane z centrum obliczeniowego (zarządzającego) do odbiornika ruchomego w terenie. Trzy najbardziej rozpowszechnione z nich to: FKP, MAC i VRS lub PRS (nie fizyczna stacja referencyjna ).

FKP (FLÄCHENKORREKTURPARAMETER)
W koncepcji FKP wykorzystuje się obliczone w centrum obliczeniowym na podstawie danych obserwacyjnych z sieci stacji referencyjnych, gradienty wpływu jonosfery, troposfery i błędów orbit (tzw. geometryczne i jonosferyczne poprawki powierzchniowe) na obserwacje GNSS. Gradienty te pozwalają skorygować obserwacje z wybranej stacji referencyjnej w zależności od położenia względem niej odbiornika ruchomego.

MAC (MASTER AND AUXILIARY CONCEPT)
Koncepcja MAC zakłada, że dla wszystkich obserwacji uczestniczących w rozwiązaniu sieciowym wyznaczona oraz zredukowana zostaje do jednego poziomu nieoznaczoność fazy. Dla pewnej grupy stacji (zwykle od 5 do 8), zwanej komórką, wybierana jest jedna stacja główna (ang. master), a pozostałe stanowią tzw. stacje poboczne (ang. auxiliary). Dane ze stacji pobocznych przesyłane do odbiornika ruchomego w terenie zredukowane są o wartość obliczoną z danych geometrycznych (współrzędne satelitów i stacji, stąd mowa tu o „poprawkach”), zróżnicowane względem stacji głównej i rozdzielone na część dyspersyjną (lub jonosferyczną) i niedyspersyjną (lub geometryczną). Poprawki przesyłane dla stacji pobocznych, wraz z obserwacjami dla stacji głównej mogą np. posłużyć do odtworzenia pełnych obserwacji fazowych również na każdej stacji pobocznej. Dodatkowo, ponieważ obserwacje na wszystkich stacjach zredukowane są do jednego poziomu nieoznaczoności, możliwe jest zachowanie ciągłości rozwiązania fixed w odbiorniku ruchomym nawet w przypadku przeskoku rozwiązania z jednej stacji referencyjnej na inną.

MAC (MASTER AND AUXILIARY CONCEPT)

VRS (VIRTUAL REFERENCE STATIONS )
VRS zakłada obliczenie teoretycznych obserwacji GNSS dla punktu o zadanych współrzędnych w sieci stacji referencyjnych. Punkt ten tworzony jest w niewielkiej odległości od odbiornika ruchomego pracującego w terenie. Takie wirtualne obserwacje, wraz ze współrzędnymi punktu, dla którego zostały obliczone, przesyłane są następnie do rovera. Mogą one zostać fakultatywnie uzupełnione o charakterystykę dokładnościową modelowania części dyspersyjnej i niedyspersyjnej obserwacji, czy współrzędne najbliższej fizycznej stacji referencyjnej.
PROTOKÓŁ TRANSMISJI NMEA Protokół transmisji NMEA został opracowany przez National
Marine Electronics Association i jest standardowym protokołem wykorzystywanym przez odbiorniki GPS do komunikacji z urządzeniami elektronicznymi tj. komputer, echosonda lub autopilot. W oparciu o ten protokół utworzono już szereg innych formatów zapisu danych. Wiadomości NMEA-0183 używają zestawu znaku ASCII i mają precyzyjnie zdefiniowany format. Każda z nich zaczyna się od znaku $, a kończy się znakami końca linii <CR><LF> (ang. carriage return i line feed). Liczba widocznych znaków w pojedynczej sekwencji nie może przekraczać 80, a poszczególne dane oddzielone są od siebie za pomocą znaku przecinka. Pierwsze litery tworzą nagłówek, który określa, kod urządzenia oraz informacje, jakie znajdują się w danej linii. Dla urządzeń GPS kodem urządzenia jest GP, a informacje zawarte w linii definiowane są przez takie sekwencje nagłówków jak np. GGL czy GSV. Najważniejsze sekwencje przedstawiono i opisano poniżej.

WIADOMOŚĆ NMEA ODBIORNIKÓW GNSS
Istnieje wiele standardowych wiadomości NMEA, które mogą być wysyłane przez odbiorniki GNSS. Zwykle jednak tylko kilka najważniejszych z nich jest implementowanych przez producentów typowych odbiorników nawigacyjnych. Ilość tych wiadomości jest tym większa im wyższa jest klasa odbiornika i im więcej dodatkowych funkcji on posiada (np. wbudowany kompas, wysokościomierz, itp.). Najczęściej wykorzystywane w praktyce wiadomości NMEA zestawiono w tabeli.

WIADOMOŚĆ NMEA ODBIORNIKÓW GNSS

WIADOMOŚĆ GGA
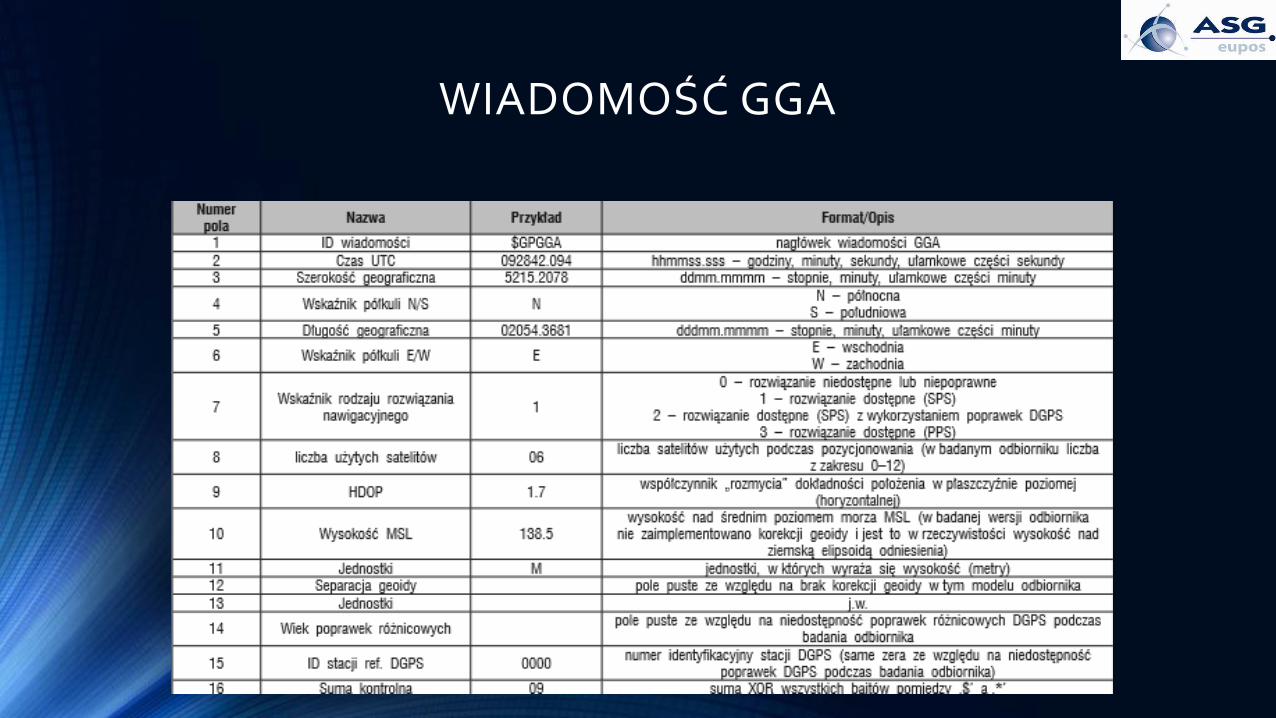
Wiadomość GGA należy do najczęściej wykorzystywanych w praktyce standardowych wiadomości NMEA. Jako jedyna zawiera ona ustalone przez odbiornik GNSS 3-wymiarowe położenie użytkownika w postaci współrzędnych elipsoidalnych (ϕ, λ, h). Współrzędne te stanowią odpowiednio szerokość geodezyjną, długość geodezyjną i wysokość nad ziemską elipsoidą odniesienia. W niektórych odbiornikach GPS zamiast wysokości nad ziemską elipsoidą odniesienia jest podawana wysokość nad geoidą, czyli nad średnim poziomem morza MSL (Mean Sea Level). Wymaga to przechowywania lub obliczania w odbiorniku GPS wartości separacji geoidy dla różnych lokalizacji na kuli ziemskiej. Zawartość wiadomości GGA została przedstawiona w tabeli.
WIADOMOŚĆ GGA
PROTOKÓŁ NTRIP
NTRIP (Networked Transport of RTCM via Internet Protocol) to protokół transmisji danych opracowany przez Bundesamt für Kartographie und Geodäsie (BKG), Frankfurt, Niemcy. Protokół ten w pierwotnej wersji miał być wykorzystywany do transportu danych korekcyjnych RTCM, co jest ujęte w jego nazwie. Jednak stał się on tak uniwersalny, że można go wykorzystać do przesyłania wszelakich danych gdzie wymagany transfer nie przekracza 5 kbit/s. Obecnie jest on wykorzystywany do transportu danych GNSS począwszy od danych RAW poprzez dane RTCM, a na danych tekstowych NMEA kończąc.

PROTOKÓŁ NTRIP
Nie bez znaczenia dla dystrybucji danych z wykorzystaniem protokołu NTRIP był również rozwój telefonii komórkowej i możliwość łączenia się z Internetem za pomocą połączeń CSD (wydzwanianych), a później szybkich pakietowych transmisji danych jak GPRS, a obecnie rozwijanych (telefonia trzeciej generacji) szybkich multimedialnych transmisji danych jak EDGE czy UMTS. System do udostępniania danych GNSS tworzy moduł komunikacji HTTP/TCP/IP oraz moduły sprzętowo/programowe: moduł stacji referencyjnych, moduł Castera oraz moduł klienta. Schemat działania systemu dystrybucji danych z wykorzystaniem protokołu NTRIP prezentują poniższe rysunki.

PROTOKÓŁ NTRIP

STANDARD RTCM
RTCM (Radio Technical Commission for Maritime) – standard transmisji poprawek różnicowych dla użytkowników systemu GPS w odmianie DGPS. Pełna nazwa to RTCM SC-104. SC-104 oznacza powołaną specjalną komisję (Special Committee) o numerze 104. Wszystkie poprawki RTCM są przekazywane w czasie rzeczywistym z minimalną prędkością 50 bitów/s na częstotliwości L1 systemu GPS z wykorzystaniem kodu C/A.
Format RTCM SC-104 zawiera 63 typy wiadomości.

FORMAT CMR
CMR to format transmisji poprawek kinematycznych w systemie GPS RTK, charakteryzujący się lepszą kompresją danych niż format RTCM Format opracowany został przez firmę Trimble. Stosowany w niektórych typach odbiorników GPS. Zastosowanie znalazł w geodezji, pomiarach lądowych i morskich.

SPECYFIKACJA TECHNICZNA

TRANSMISJA DANYCH
NMEA 0183 GGA standard przesyłu współrzędnych i parametrów pracy odbiornika GNSS (użytkownika)
RTCM 10402.x, RTCM 10403.x, CMR standard udostępniania poprawek różnicowych i obserwacji GNSS w serwisach RT
NTRIP (v.1.0 lub 2.0) – (ang. Networked Transport of RTCM via IP) protokół komunikacji użytkownika z systemem

ZAKŁADANIE KONTA W SYSTEMIE ASG

ZAKŁADANIE KONTA W SYSTEMIE ASG-EUPOS Od kwietnia 2016 zmienił się sposób zamawiania usług w systemie ASG-EUPOS. Procedura została zautomatyzowana i w tym momencie wystarczy komputer z dostępem do Internetu oraz kilka minut czasu aby założyć konto i wykupić dostęp do wybranych serwisów. Zamówienie odbywa się przez Portal PZGiK. W ten sam sposób można przedłużyć ważność konta na kolejny okres czasu.

ABY UZYSKAĆ DOSTĘP DO SYSTEMU ASG-EUPOS NIEZBĘDNE JEST WYKONANIE PONIŻSZYCH CZYNNOŚCI
1) Wchodzimy na stronę Portalu PZGiK (https://pzgik.geoportal.gov.pl/imap/).
2) Najeżdżamy kursorem na kafelek ASG-EUPOS i klikamy Zamów usługi.
3) System poprosi o zalogowanie się lub założenie konta.
• Jeśli posiadamy już konto w Geoportalu to klikamy Zaloguj się, wpisujemy dane dostępowe i przechodzimy dalej.
• Jeśli jeszcze nie posiadamy konta, to klikamy Załóż konto i podajemy dane rejestracyjne.
• Po rejestracji otrzymamy maila w którym musimy kliknąć link aktywujący konto.
• Po tych czynnościach możemy się zalogować, a następnie uzupełnić dane konta.
4) Po zalogowaniu ponownie najeżdżamy kursorem na kafelek ASG-EUPOS i klikamy Zamów usługi.
5) Pojawi się panel Moje konto w systemie ASG EUPOS, gdzie do wyboru mamy dwie opcje:
• Powiąż istniejące konto ASG EUPOS z kontem Portalu PZGiK
• Utwórz nowe konto w systemie ASG EUPOS
6) Aby założyć nowe konto, wybieramy opcję drugą: Utwórz nowe konto w systemie ASG EUPOS, podajemy dane dla konta (podczas podawania danych nie należy używać polskich znaków, spacji i unikać zbyt długich nazw użytkowania lub firmy) i klikamy Zapisz konto.
7) Po prawidłowym przejściu poprzedniego kroku pojawi się komunikat Konto zostało utworzone w systemie ASG-EUPOS i powiązane z kontem Portalu PZGiK.
8) Teraz możemy zamówić dla naszego konta subskrypcję wybranego serwisu klikając Nowa subskrypcja.

ABY UZYSKAĆ DOSTĘP DO SYSTEMU ASG-EUPOS NIEZBĘDNE JEST WYKONANIE PONIŻSZYCH CZYNNOŚCI
8) Teraz możemy zamówić dla naszego konta subskrypcję wybranego serwisu klikając Nowa subskrypcja.
9) Do wyboru mamy 5 rodzajów serwisów:
• Udostępnianie danych korekcyjnych sieciowych (RTN) - NAWGEO RTN
• Udostępnianie danych korekcyjnych z pojedynczej stacji referencyjnej (RTK) - NAWGEO RTK
• Udostępnianie danych korekcyjnych różnicowych (DGPS) - KODGIS
• Udostępnianie satelitarnych obserwacji odnoszących się do stacji referencyjnych - POZGEO D
• Udostępnianie satelitarnych obserwacji dla punktów o zadanych współrzędnych (wirtualnych stacji referencyjnych) - POZGEO D
10) Po wybraniu odpowiedniego serwisu, wybieramy na jaki okres zamawiamy usługę (zazwyczaj 1 rok) i kiedy ma ona zostać aktywowana.
11) Gdy formularz jest już uzupełniony, klikamy Złóż zamówienie
12) Po chwili pokaże się okno z Dokumentem obliczenia opłaty i dwoma możliwościami płatności:
• Zapłać online
• Zapłać później
13) Jeżeli posiadamy konto w banku obsługiwane przez system płatności online, to możemy w nim wykonać płatność i uzyskać od razu dostęp do wykupionego serwisu.
14) Jeżeli chcemy zapłacić zwykłym przelewem, zapisujemy PDF z Dokumentem obliczenia opłaty i dokonujemy wpłaty na podany w nim numer konta. Wtedy wykupiony serwis stanie się aktywny po wpłynięciu przelewu na konto.

KONFIGURACJA ODBIORNIKA NA PRZYKŁADZIE MOBILEMAPPER 120/220
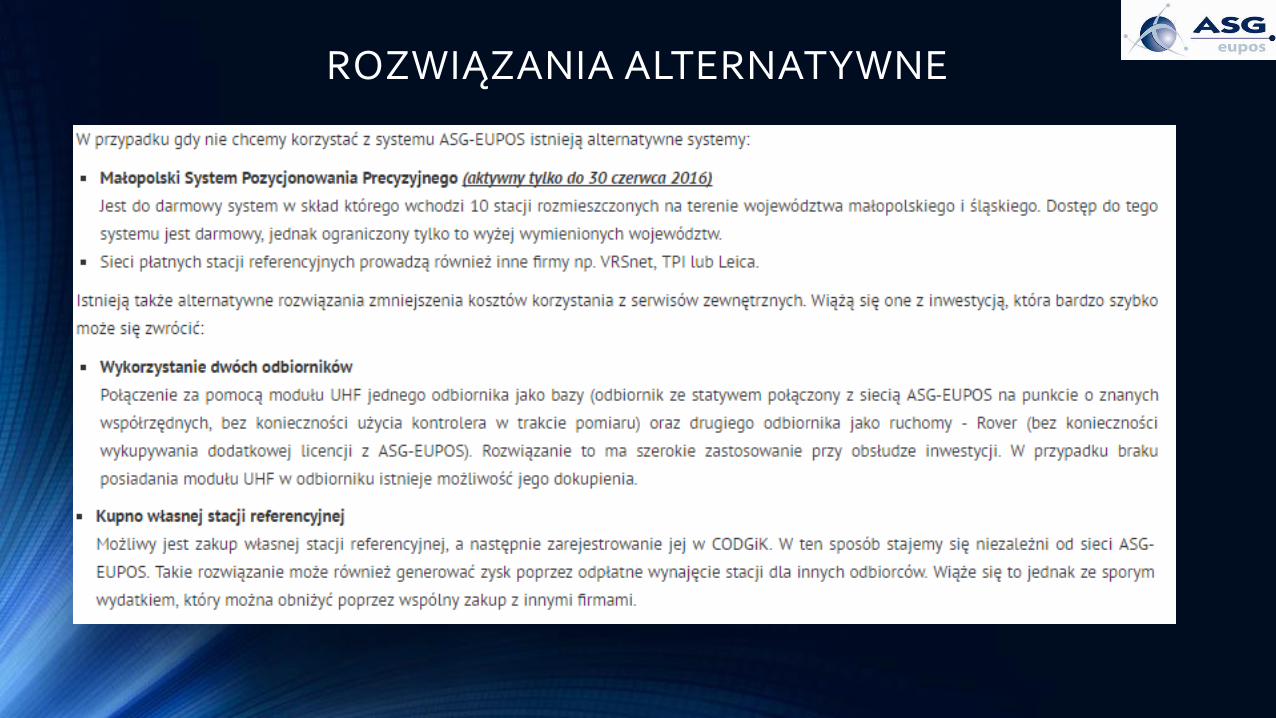
ROZWIĄZANIA ALTERNATYWNE

ASG-EUPOS TO NIE MONOPOL, SĄ TEŻ ALTERNATYWY

TPI NETPRO Sieć dostępna jest jedynie dla klientów firmy TPI, którzy kupili odbiornik Topcon lub Sokkia. TPI NETpro jest częścią światowej sieci TopNET Live tworzonej przez firmę Topcon. System TopNET Live dostępny między innymi jest w krajach takich jak Stany Zjednoczone, Kanada, Australia, Wielka Brytania, Dania, Włochy.
TPI NETpro udostępnia poprawki sieciowe RTK zarówno do systemu GPS jak i GLONASS. Wykorzystanie najnowszych odbiorników, anten oraz oprogramowania do generowania korekt umożliwia działanie z dwoma systemami GNSS. Co więcej, system jest przygotowany do pracy z będącym w trakcie tworzenia europejskim systemem GALILEO. Praca z korektami GNSS znacząco podnosi niezawodność pomiaru, jak również jego dokładność.
W sieci TPI NETpro działa łącznie 136 stacji referencyjnych, w tym 117 stacji równomiernie rozmieszczonych na terenie całego kraju. Dodatkowo do naszego systemu włączyliśmy 19 zagranicznych stacji zlokalizowanych na terenie Czech (9 stacji), Ukrainy (7 stacji) i Niemiec (3 stacje) aby poprawić pracę odbiorników na terenach przygranicznych. Planujemy włączanie do sieci kolejnych stacji z krajów sąsiednich.
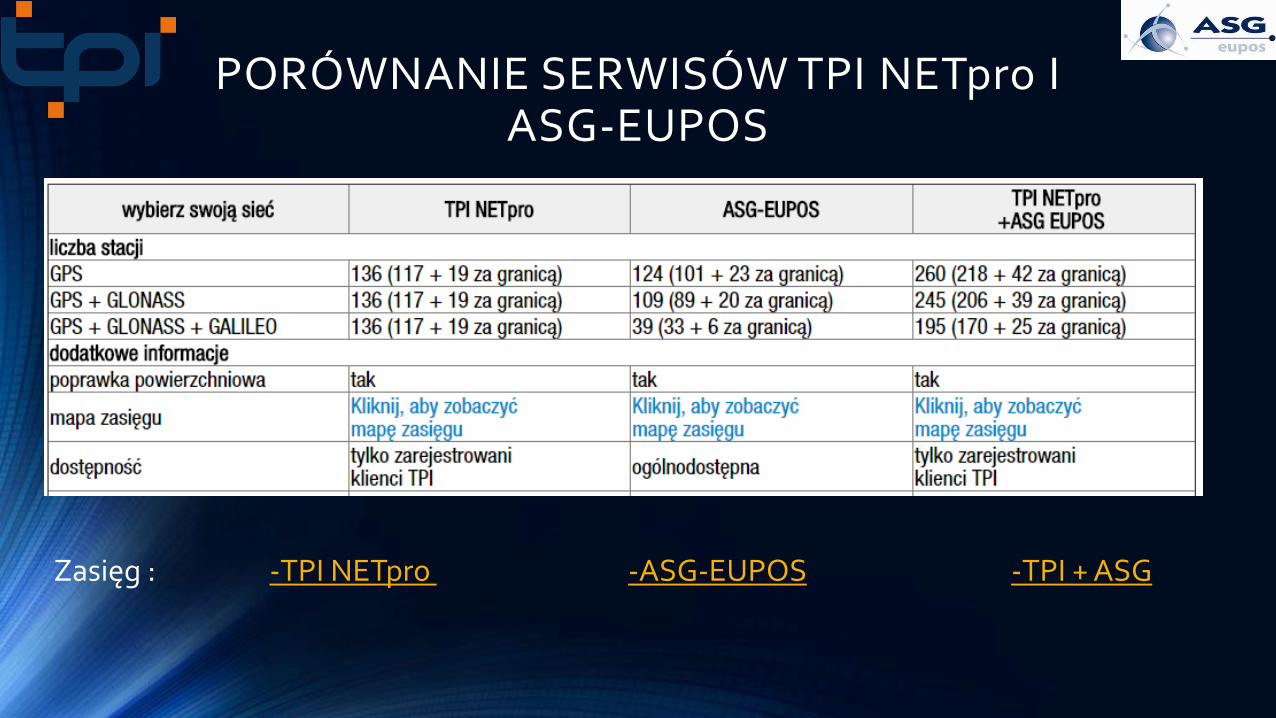
PORÓWNANIE SERWISÓW TPI NETpro I ASG-EUPOS
Zasięg : -TPI NETpro -ASG-EUPOS -TPI + ASG
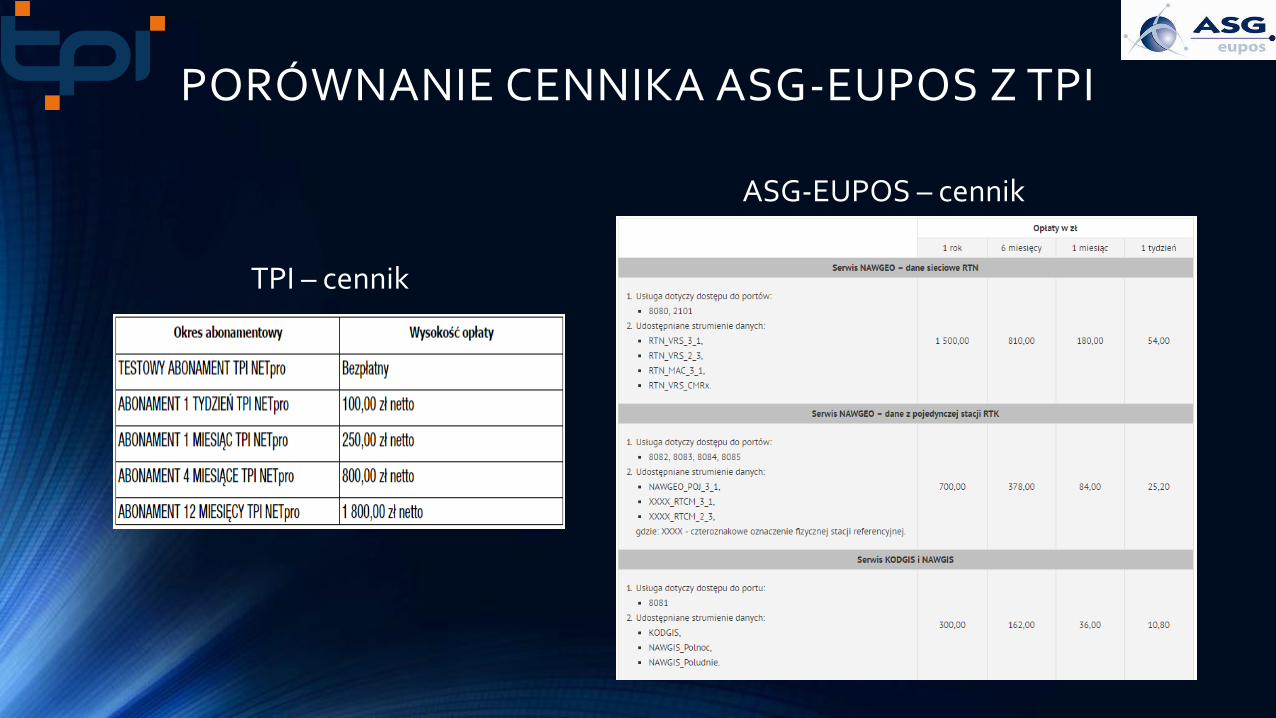
PORÓWNANIE CENNIKA ASG-EUPOS Z TPI
TPI – cennik
ASG-EUPOS – cennik

SMARTNET POLSKA
SmartNet to sieć GNSS zbudowana w oparciu o najnowocześniejsze oprogramowanie i urządzenia Leica Geosystems, dostarczająca na okrągło poprawki DGNSS i RTK. W sieci SmartNet użytkownicy mają nie tylko łatwy dostęp do precyzyjnych poprawek, ale mogą przede wszystkim cieszyć się największą dostępnością i niezawodnością usług sieciowych i realizować wiarygodne pomiary w różnych warunkach śledzenia satelitów. Jest to możliwe dzięki zapewnieniu zgodności z uznanymi międzynarodowymi standardami oraz dodatkowym płatnym opcjom, które spełniają potrzeby lokalnych użytkowników.
Dostępne w sieci usługi RTK obejmują: przesyłanie poprawek Leica MAX (zgodnie z RTCM Master Auxiliary Concept) stanowiących pierwszy i jedyny międzynarodowy standard w sieciach RTK, rozwijany przez Leica Geosystems i innych członków rady RTCM, poprawki i-MAX, wirtualne stacje referencyjne (VRS) oraz FKP.
Wysoka jakość dostarczanych usług jest gwarantowana przez rozbudowane centra przetwarzania i monitoringu danych, które są pod stałym nadzorem 24 h/dobę przez 365 dni w roku.
Dzięki szerokiemu zakresowi usług sieciowych i RTK, sieć SmartNet stała się standardem w pracy z danymi GNSS. Wielu profesjonalistów korzysta z możliwości jakie daje SmartNet w celu efektywnej i szybkiej realizacji zadań pomiarowych w geodezji, inżynierii, budownictwie, rolnictwie, sterowaniu maszynami, pomiarach katastralnych, archeologii, monitoringu strukturalnym, badaniu miejsc wypadków, i wielu innych zastosowaniach.

VRSNET
Sieć VRSnet firmy Trimtech składa się obecnie z 65 stacji referencyjnych. Jako że budowana jest w ramach różnych projektów dofinansowanych z regionalnych programów operacyjnych, aktualnie zbudowana jest z trzech segmentów pokrywających województwa: zachodniopomorskie, świętokrzyskie i śląskie. Dodatkowo do sieci włączono pojedyncze stacje w różnych częściach kraju . Trimtech rozbudować VRSnet o kolejne stacje, tak aby pokryć ich zasięgiem całą Polskę. Na wszystkich działających stacjach trwają prace, mające na celu ich przyjęcie do PZGiK. Sieć VRSnet jest ogólnodostępna i obecnie mogą się do niej rejestrować i testować bez opłat wszyscy zainteresowani użytkownicy (na razie nie ustalono jej cennika). Trimtech podkreśla, że VRSnet jest jedyną siecią stacji referencyjnych w Polsce, która dzięki obsłudze standardu CMRx oferuje nie tylko korekty dla systemów GPS i GLONASS, ale także chińskiego BeiDou.
NADOWSKI NET
Sieć stanowi obecnie 47 stacji zapewniających stabilną i dokładną korektę GPS & GLONASS na terenie województw – śląskiego, opolskiego, małopolskiego, świętokrzyskiego i podkarpackiego. Wszystkie stacje sieci NadowskiNET stanowią punkty wielofunkcyjnej osnowy szczegółowej PZG.

MAŁOPOLSKI SYSTEM POZYCJONOWANIA PRECYZYJNEGO

LITERATURA
- Jagielski A., Geodezja II, Wydawnictwo Geodpis, Kraków 2007.
- Lamparski J., Świątek K., GPS w praktyce geodezyjnej, Wydawnictwo Gall, Katowice 2016.
- Czasopismo Elektronika Praktyczna 10/2006

ŹRÓDŁA INTERNETOWE
-http://ep.com.pl/files/3937.pdf -https://sklep.navigate.pl/index.php/porady/105-asg-eupos-jak-korzystac -http://www.technologiagps.org.pl/dzialanie-gps.html -http://journals.bg.agh.edu.pl/GEODEZJA/200503/Geodezja_2005_02_12.pdf -http://ntrip.w.interiowo.pl/ntrip.html -http://www.niezbednik.marecki.swidnica.pl/Przepisy/ASG%20EUPOS/ ASG%20EUPOS%20Poradnik%202013%20wydanie%202.pdf -https://sklep.navigate.pl/index.php/porady/105-asg-eupos-jak-korzystac -http://nav-sat.cba.pl/index.php/gnss/gps-navstar/nmea-0183/ -http://www.kosmos.gov.pl/download/Prezentacja_GUGIK.pdf -http://docplayer.pl/7731616-Serwisy-czasu-rzeczywistego-nawgeo-kodgis-nawgis.html -http://geoforum.pl/?page=news&id=17942&link=czy-jest-alternatywa-dla-asg-eupos- -http://www.tpinet.pl/index.php/o-sieci/opis-sieci -https://sklep.navigate.pl/index.php/porady/105-asg-eupos-jak-korzystachgohlbnhgg#oplaty