AMS-3000S技術情報 Vol.1 「外部機器の接続情報」
13
1 AMS-3000S 技術情報 Vol.1 「外部機器の接続情報」 2003 年 8 月 22 日初版 2006 年 2 月 6 日改訂(1.21) ナビコムアビエーション(株) 1 はじめに AMS-3000S に GPS、コンパス、高度計などの外部機器を接続する方法を解説します。GPS は必 須、コンパス、高度計は接続を推奨、TAS、衛星電話(外部通信機器)はオプションです。接続ブ ロック図を以下に示します。結線図を次ページに示します。 注意 : ARINC429 入力には、ARINC1 と ARINC2 とがありますが、ARINC2 のみ使用します。 GPS受信機 ( 必須) コ ンパス (推奨 ) ARINC429出力 気圧高度計 (オプション ) グレイコート ゙出力 気圧高度計 (推奨) TA S9900 BX or TCAD9900B (オプション) 外部通信機器 (オプション ) AMS-300 0S マップジェネレータ本体 コントローラ ディスプレイ 外部表示機器 (オプション ) RS-2 32C ARINC429 高度計は パラレルI/F または ARINC429で接続可 RS-2 32C RS-2 32C パラ レルI/F コントローラケーフ ゙ル ディスフ ゚レイケーブル ( RGB) コンポジット ビデオ出力 外部12 V 電源出力 28V電源入力 エアマップAMS-3000S 接続 ブロック図
Transcript of AMS-3000S技術情報 Vol.1 「外部機器の接続情報」
1
AMS-3000S 技術情報 Vol.1
「外部機器の接続情報」
2003 年 8 月 22 日初版
2006 年 2 月 6 日改訂(1.21)
ナビコムアビエーション(株)
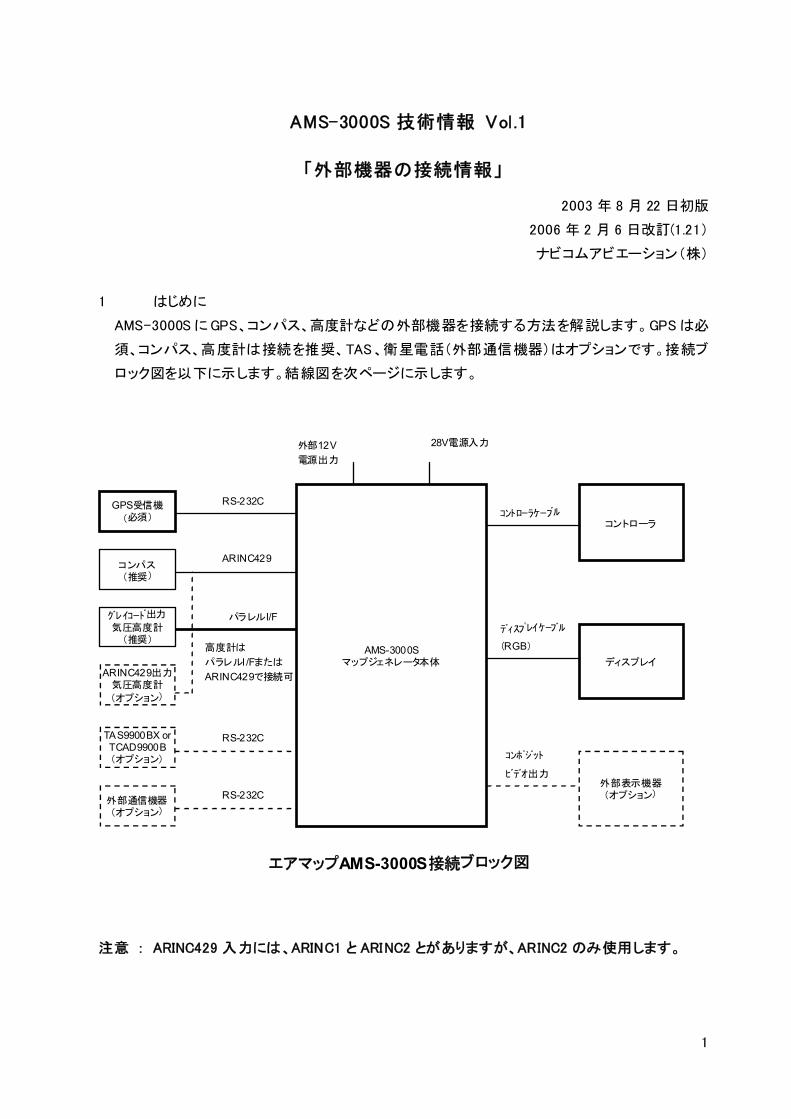
1 はじめに
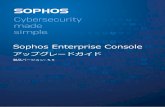
AMS-3000S にGPS、コンパス、高度計などの外部機器を接続する方法を解説します。GPS は必
須、コンパス、高度計は接続を推奨、TAS、衛星電話(外部通信機器)はオプションです。接続ブ
ロック図を以下に示します。結線図を次ページに示します。
注意 : ARINC429 入力には、ARINC1 と ARINC2 とがありますが、ARINC2 のみ使用します。
GPS受信機
(必須)
コンパス(推奨)
ARINC429出力気圧高度計
(オプション)
グレイコード 出力
気圧高度計(推奨)
TAS9900BX orTCAD9900B(オプション)
外部通信機器(オプション)
AMS-3000Sマップジェネレータ本体
コントローラ
ディスプレイ
外部表示機器(オプション)
RS-232C
ARINC429
高度計は
パラレルI /Fまたは
ARINC429で接続可
RS-232C
RS-232C
パラレルI/F
コントローラケーブル
ディスプレイケ フー゙ル
(RGB)
コンポジット
ビデオ出力
外部12V電源出力
28V電源入力
エアマップAMS-3000S接続ブロック図
2
3
3
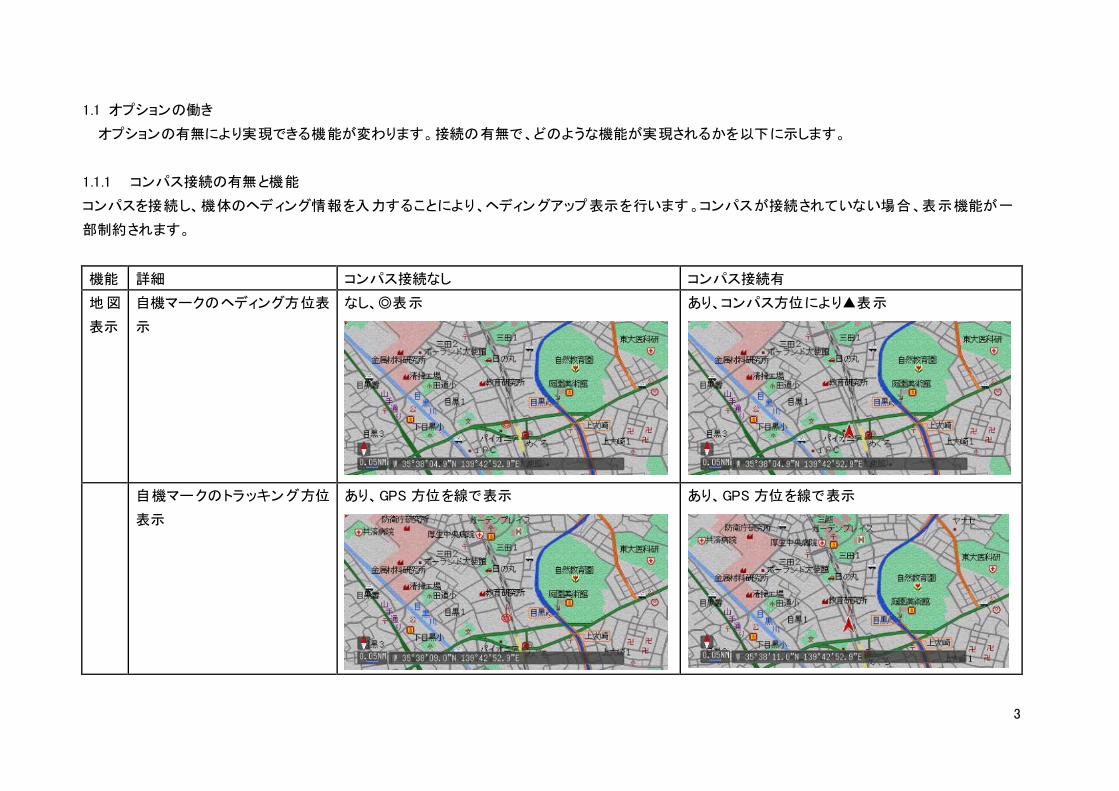
1.1 オプションの働き
オプションの有無により実現できる機能が変わります。接続の有無で、どのような機能が実現されるかを以下に示します。
1.1.1 コンパス接続の有無と機能
コンパスを接続し、機体のヘディング情報を入力することにより、ヘディングアップ表示を行います。コンパスが接続されていない場合、表示機能が一
部制約されます。
機能 詳細 コンパス接続なし コンパス接続有
地 図
表示
自機マークのヘディング方位表
示
なし、◎表示
あり、コンパス方位により▲表示
自機マークのトラッキング方位
表示
あり、GPS 方位を線で表示
あり、GPS 方位を線で表示
4
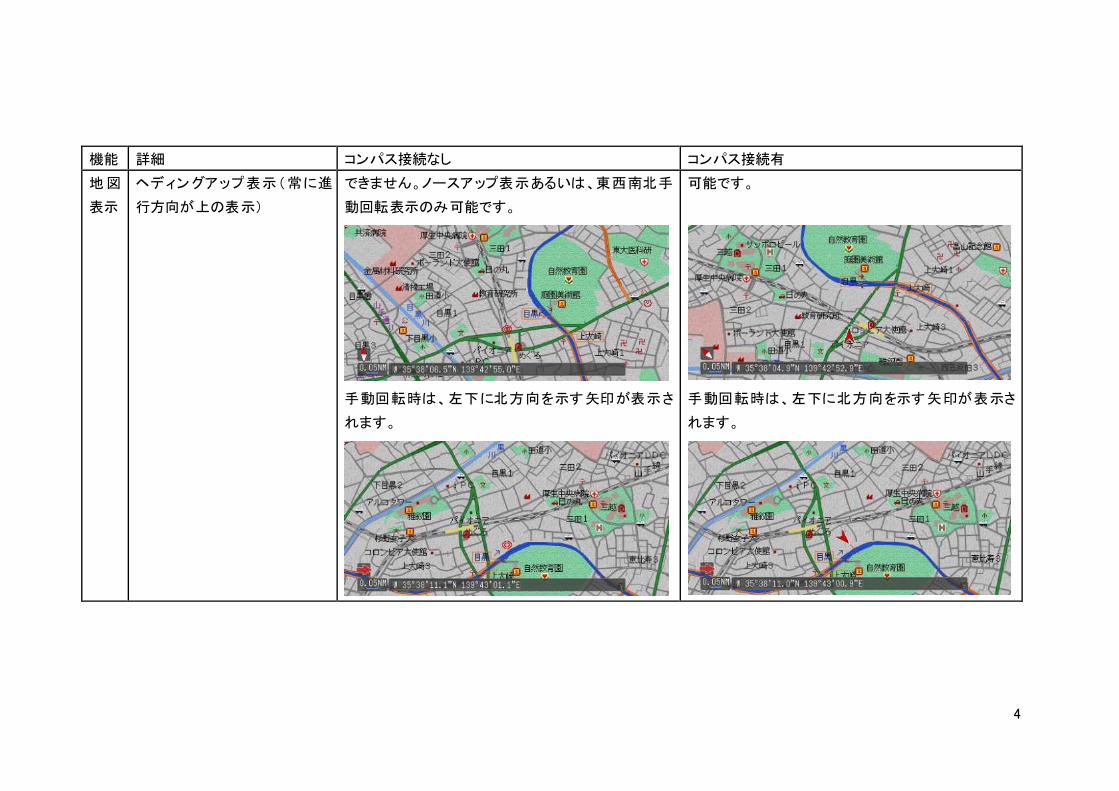
機能 詳細 コンパス接続なし コンパス接続有
地 図
表示
ヘディングアップ表示(常に進
行方向が上の表示)
できません。ノースアップ表示あるいは、東西南北手
動回転表示のみ可能です。
手動回転時は、左下に北方向を示す矢印が表示さ
れます。
可能です。
手動回転時は、左下に北方向を示す矢印が表示さ
れます。
5
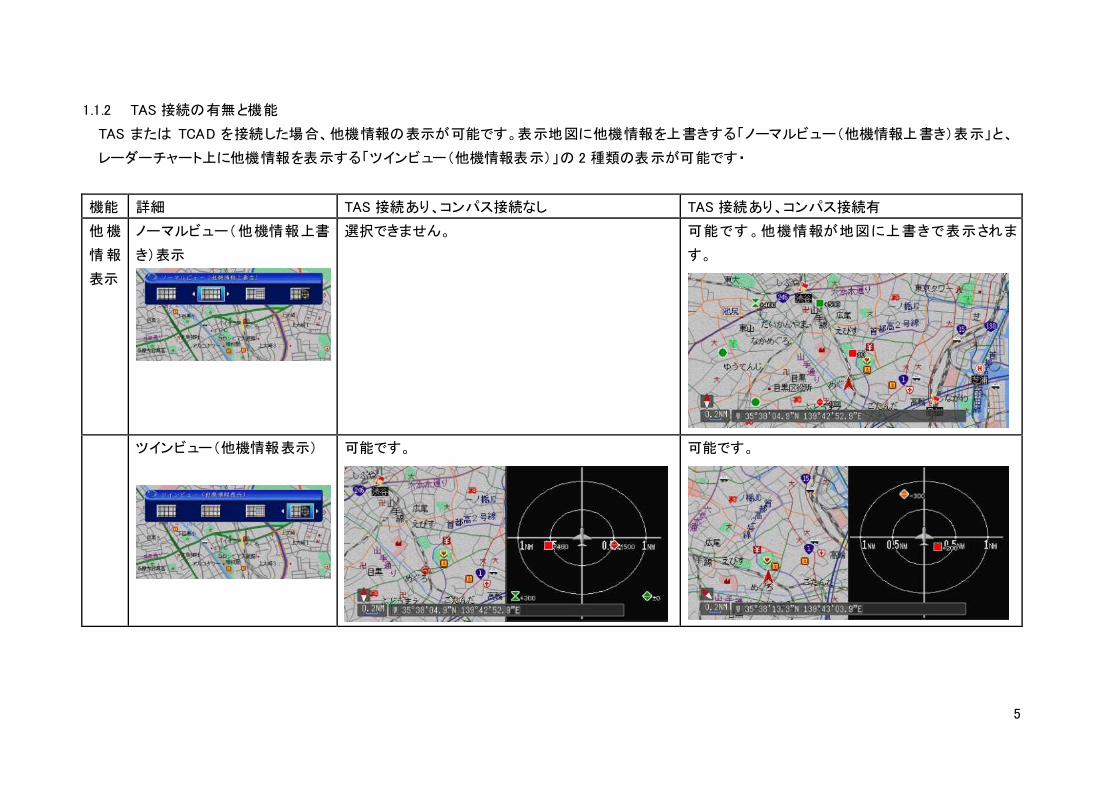
1.1.2 TAS 接続の有無と機能
TAS または TCAD を接続した場合、他機情報の表示が可能です。表示地図に他機情報を上書きする「ノーマルビュー(他機情報上書き)表示」と、
レーダーチャート上に他機情報を表示する「ツインビュー(他機情報表示)」の 2 種類の表示が可能です・
機能 詳細 TAS 接続あり、コンパス接続なし TAS 接続あり、コンパス接続有
他 機
情 報
表示
ノーマルビュー(他機情報上書
き)表示
選択できません。
可能です。他機情報が地図に上書きで表示されま
す。
ツインビュー(他機情報表示)
可能です。
可能です。

6
1.1.3 高度計接続の有無と機能
高度計を接続することにより、高度警戒領域表示機能を実現します。この機能は、高度計で検出した高度情報と、システムで持っている標高データ
から自機高度より高い標高を持つ領域を塗りつぶす機能です。
機能 詳細 高度計接続なし 高度計接続あり
地 図
表示
高度警戒領域表示 できません。
可能です。1NM(2km)スケール、2NM(5km)スケールを
選択すると表示されます。
設定 QNH 補正値入力 選択できません。
QNH 補正値の入力は必須です。
「スタートメニュー」、「設定・確認」、「高度計 QNH 補
正値設定」により設定します。
7
1.1.4 外部通信機器接続の有無と機能
機能 詳細 外部通信機器接続なし 外部通信機器接続あり
通 信
機能
位置情報通信、
メッセージ情報通信など
できません。 可能です。
通信機能の詳細は、インストールマニュアル「付録 B.1 外部通信仕様書」を参照して下さい。
8
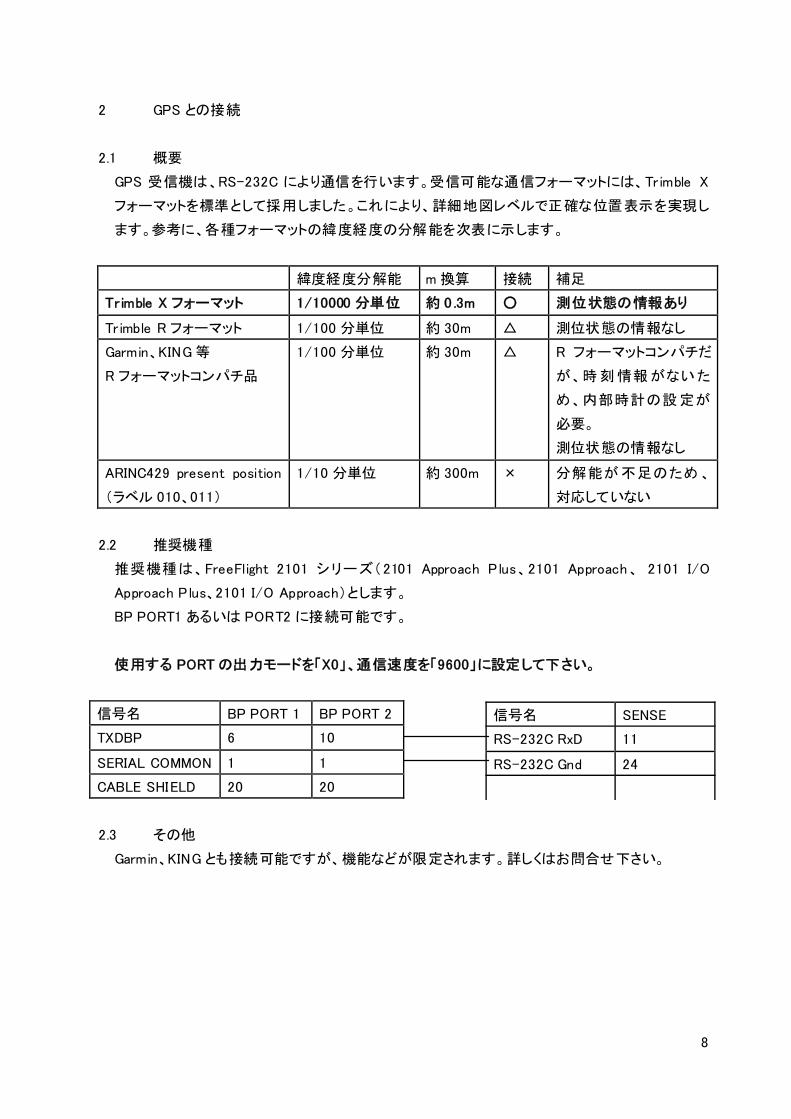
2 GPS との接続
2.1 概要
GPS 受信機は、RS-232C により通信を行います。受信可能な通信フォーマットには、Trimble X
フォーマットを標準として採用しました。これにより、詳細地図レベルで正確な位置表示を実現し
ます。参考に、各種フォーマットの緯度経度の分解能を次表に示します。
緯度経度分解能 m 換算 接続 補足
Tr imble X フォーマット 1/10000 分単位 約 0 .3m ○ 測位状態の情報あり
Tr imble R フォーマット 1/100 分単位 約 30m △ 測位状態の情報なし
Garmin、KING 等
R フォーマットコンパチ品
1/100 分単位 約 30m △ R フォーマットコンパチだ
が、時 刻 情報 がないた
め、内部時計の設 定が
必要。
測位状態の情報なし
ARINC429 present position
(ラベル 010、011)
1/10 分単位 約 300m × 分解能が 不足のため 、
対応していない
2.2 推奨機種
推奨機種は、FreeFlight 2101 シリーズ(2101 Approach P lus、2101 Approach、 2101 I/O
Approach P lus、2101 I/O Approach)とします。
BP PORT1 あるいは PORT2 に接続可能です。
使用する PORT の出力モードを「X0」、通信速度を「9600」に設定して下さい。
信号名 BP PORT 1 BP PORT 2
TXDBP 6 10
SERIAL COMMON 1 1
CABLE SHIELD 20 20
2.3 その他
Garmin、KING とも接続可能ですが、機能などが限定されます。詳しくはお問合せ下さい。
信号名 SENSE
RS-232C RxD 11
RS-232C Gnd 24
9
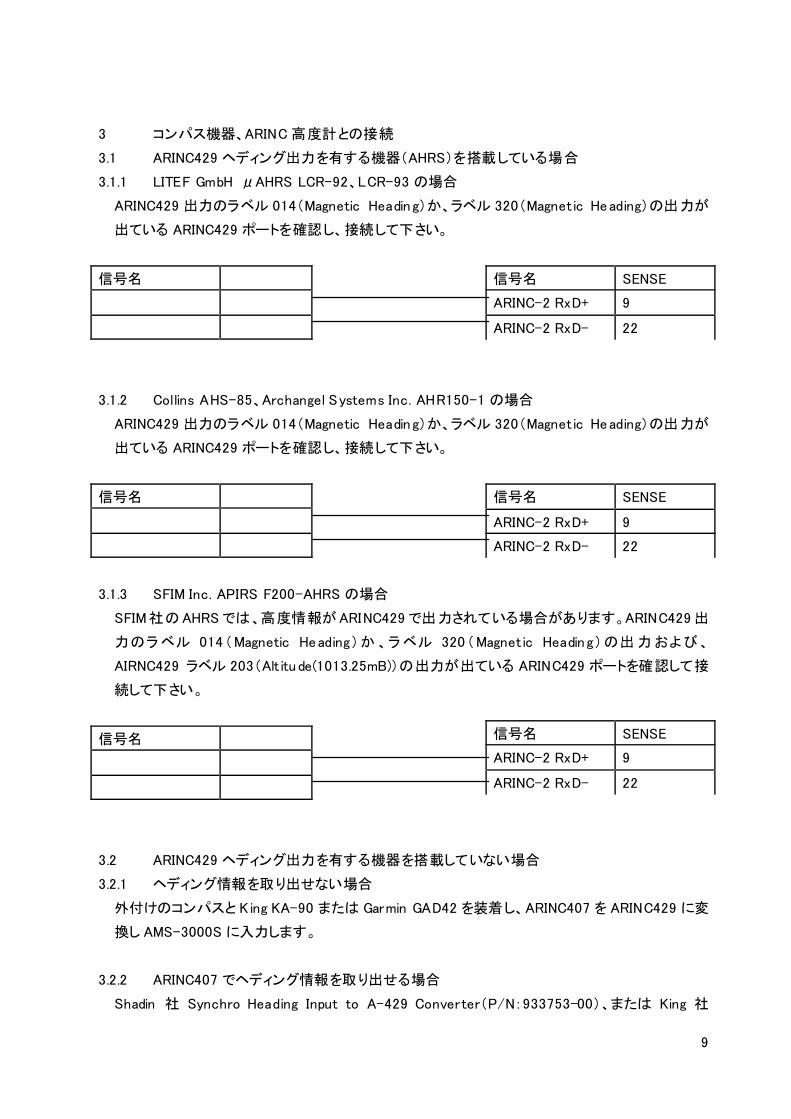
3 コンパス機器、ARINC 高度計との接続
3.1 ARINC429 ヘディング出力を有する機器(AHRS)を搭載している場合
3.1.1 LITEF GmbH μAHRS LCR-92、LCR-93 の場合
ARINC429 出力のラベル 014(Magnetic Headin g)か、ラベル 320(Magnet ic Heading)の出力が
出ている ARINC429 ポートを確認し、接続して下さい。
信号名
3.1.2 Collins AHS-85、Archangel Systems Inc. AHR150-1 の場合
ARINC429 出力のラベル 014(Magnetic Headin g)か、ラベル 320(Magnet ic Heading)の出力が
出ている ARINC429 ポートを確認し、接続して下さい。
信号名
3.1.3 SFIM Inc. APIRS F200-AHRS の場合
SFIM 社の AHRS では、高度情報が ARINC429 で出力されている場合があります。ARINC429 出
力のラ ベル 014(Magnetic Heading)か 、ラ ベル 320(Magnet ic Headin g)の出 力 および、
AIRNC429 ラベル 203(Alt itu de(1013.25mB))の出力が出ている ARINC429 ポートを確認して接
続して下さい。
信号名
3.2 ARINC429 ヘディング出力を有する機器を搭載していない場合
3.2.1 ヘディング情報を取り出せない場合
外付けのコンパスと King KA-90 または Garmin GAD42 を装着し、ARINC407 を ARINC429 に変
換し AMS-3000S に入力します。
3.2.2 ARINC407 でヘディング情報を取り出せる場合
Shadin 社 Synchro Heading Input to A-429 Converter(P/N:933753-00)、または King 社
信号名 SENSE
ARINC-2 RxD+ 9
ARINC-2 RxD- 22
信号名 SENSE
ARINC-2 RxD+ 9
ARINC-2 RxD- 22
信号名 SENSE
ARINC-2 RxD+ 9
ARINC-2 RxD- 22
10
HSI/GPS Inter face Adapter KA-90、または Garmin 社 Interface Adaptor GAD42 を装着し、
ARINC407 を ARINC429 に変換し AMS-3000S に入力します。
4 高度計との接続
4.1 概要
グレイコードを出力するアルチチュードエンコーダとのパラレル接続と、ARINC429 による接続が
選択可能です。いずれも QNH 補正前の情報を取得し、AMS-3000S の入力画面で QNH 補正値
を入力して使用します。
4.2 パラレル入力、ARINC429 入力の優先度
3.1.3 項で示す SFIM 社の AHRS を使用すると ARINC429 で高度情報が取得できる場合があり
ます。ARINC429 とパラレルの両方から高度情報が得られた場合には、AMS-3000S は、パラレ
ル接続の高度情報を使用します。
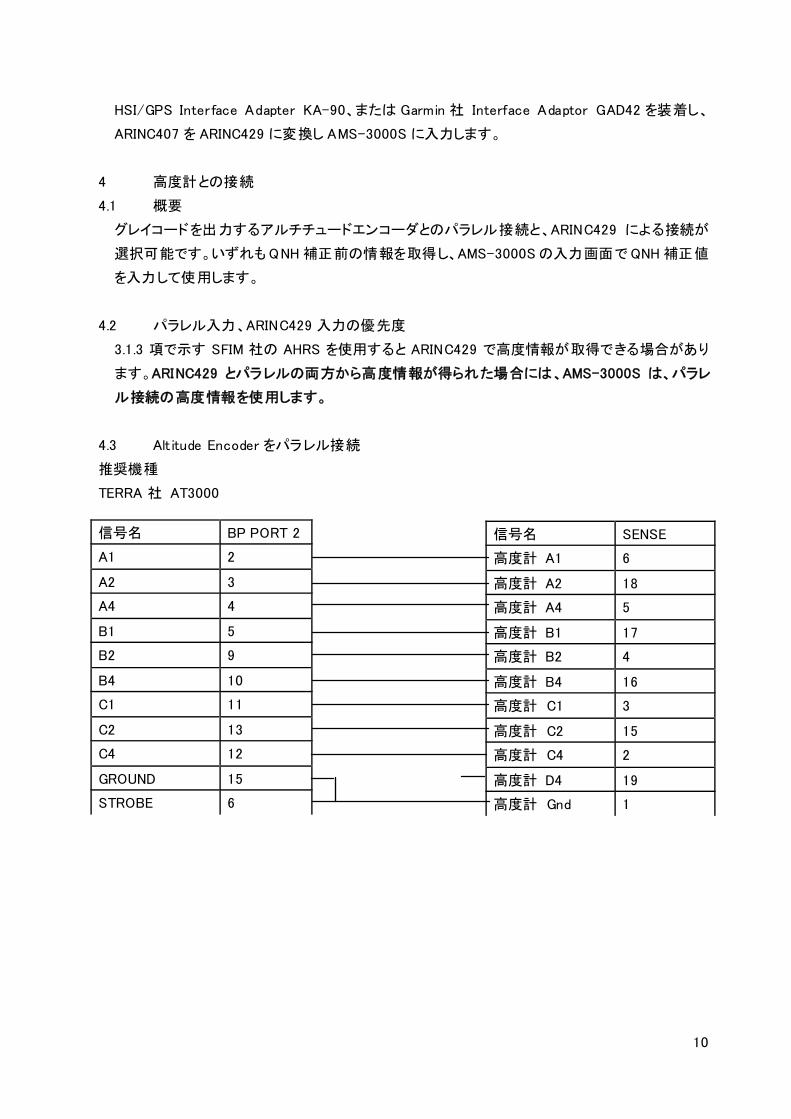
4.3 Alt itude Encoder をパラレル接続
推奨機種
TERRA 社 AT3000
信号名 BP PORT 2
A1 2
A2 3
A4 4
B1 5
B2 9
B4 10
C1 11
C2 13
C4 12
GROUND 15
STROBE 6
信号名 SENSE
高度計 A1 6
高度計 A2 18
高度計 A4 5
高度計 B1 17
高度計 B2 4
高度計 B4 16
高度計 C1 3
高度計 C2 15
高度計 C4 2
高度計 D4 19
高度計 Gnd 1
11
4.4 ADC、AHRS から ARINC 経由で取得
4.4.1 SFIM Inc. APIRS F200-AHRS の場合
ARINC429 ラベル 203(Alt itude(1013.25mB))が出力されている場合、使用可能です。3.1 .3 項を
参照して下さい。
4.4.2 Rockwell Collin s ADS-85、ADS-850 の場合
AIRNC429 ラベル 203(Alt itude (1013.25mB))をデコード可能です。ラベル 203 の出力を確認して
接続して下さい。
信号名
5 TAS との接続
Ryan 社 TAS9900BX または、TCAD9900B と接続可能です。RS-232C で接続します。詳細はイ
ンストレーションマニュアルをご覧下さい。
6 外部通信機器との接続
衛星電話 Aero-M、その他ヘリテレ無線などの外部通信機器と接続可能です。RS-232C で接続
します。仕様に関しては、インストレーションマニュアルをご覧下さい。接続方法等、詳細はお問
合せ下さい。
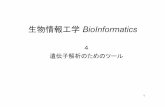
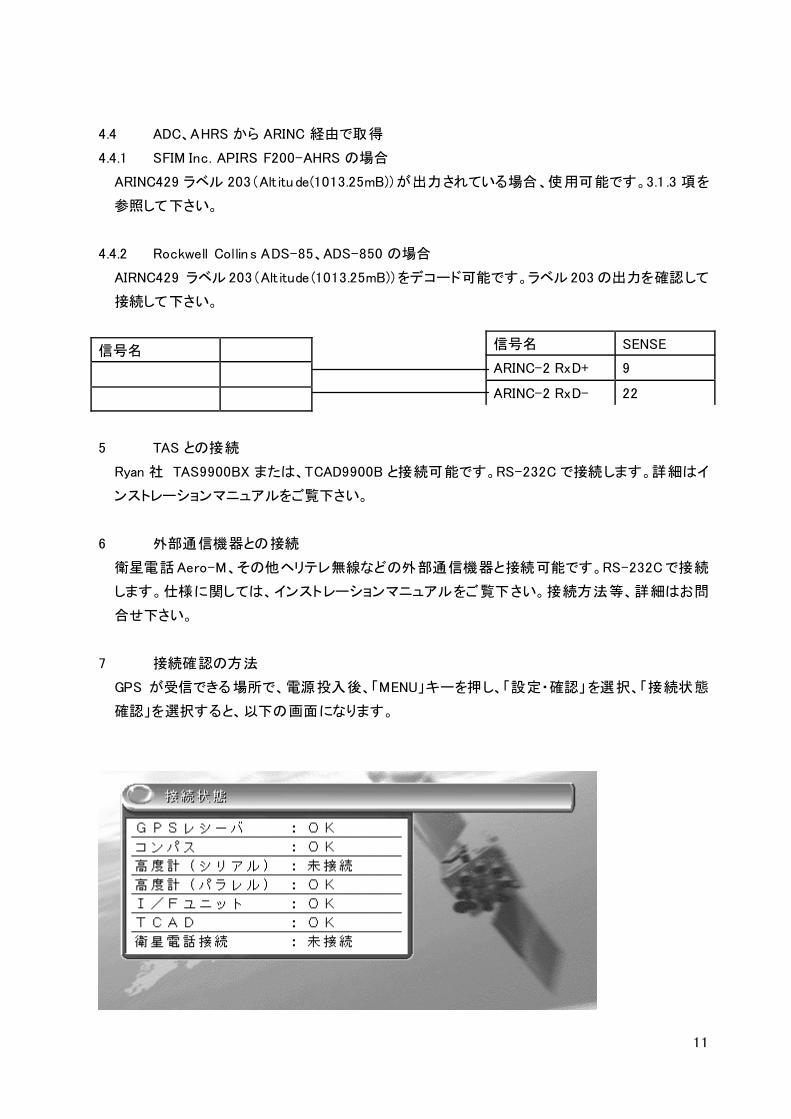
7 接続確認の方法
GPS が受信できる場所で、電源投入後、「MENU」キーを押し、「設定・確認」を選択、「接続状態
確認」を選択すると、以下の画面になります。
信号名 SENSE
ARINC-2 RxD+ 9
ARINC-2 RxD- 22
12
それぞれの項目は、以下のように表示されます。
GPSレシーバ : OK(通信有)/未接続(通信無)
コンパス : OK(通信有)/未接続(通信無)
高度計(シリアル) : OK(通信有)/未接続(通信無)
高度計(パラレル) : OK(通信有)/未接続(通信無)
I/Fユニット : OK(通信有)/NG(通信無)
TCAD : OK(通信有)/未接続(通信無)
衛星電話接続 : OK(通信有)/未接続(通信無)/― ― (確認中)
補足 : 衛星電話接続は、画面遷移時に確認します。確認には 10 秒程度かかります。
接続したのに「未接続」の表示になっている場合は、接続状況(配線は正しいか等)を再度確認
して下さい。
13
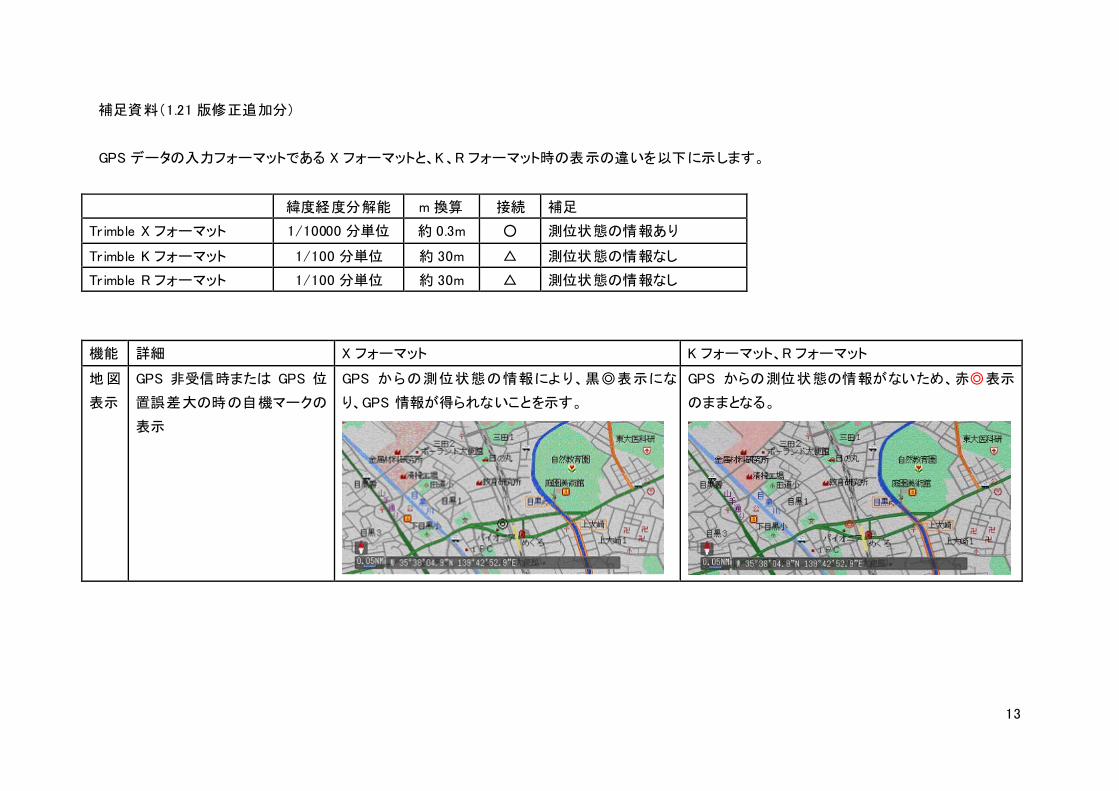
補足資料(1.21 版修正追加分)
GPS データの入力フォーマットである X フォーマットと、K、R フォーマット時の表示の違いを以下に示します。
緯度経度分解能 m 換算 接続 補足
Tr imble X フォーマット 1/10000 分単位 約 0.3m ○ 測位状態の情報あり
Tr imble K フォーマット 1/100 分単位 約 30m △ 測位状態の情報なし
Tr imble R フォーマット 1/100 分単位 約 30m △ 測位状態の情報なし
機能 詳細 X フォーマット K フォーマット、R フォーマット
地 図
表示
GPS 非受信時または GPS 位
置誤差大の時の自機マークの
表示
GPS からの測位状態の情報により、黒◎表示にな
り、GPS 情報が得られないことを示す。
GPS からの測位状態の情報がないため、赤◎表示
のままとなる。