Algorytmy syntezy uk lad ow...
21
Algorytmy syntezy uk lad´owsterowania Literatura: T. Kaczorek, Teoria sterowania, t.1 i 2, PWN, W-wa 1980; T. Kaczorek, Teoria sterowania i system´ ow, PWN, W-wa, 1996. u(t) y(t) ✲ Obiekt sterowania Obserwator stanu v(t) ✲ ✲ ✲ ❄ x(t) z(t) Niech b¸edzie dany uk lad sterowania taki, ˙ ze nie wszystkie jego zmienne stanu s¸ a bezpo´ srednio dost¸epne (mierzalne). Uk lad pozwalaj¸ acy odtworzy´ c na podstawie znajomo´ sci sterowania i wyj´ scia niedost¸ epne zmienne stanu nazywa si¸e obserwatorem stanu. Stabilizowalno´ s´ c uk lad´owsterowania. Dob´orsprz¸ e˙ zenia zwrot- nego Niestabilny otwarty uk lad sterowania opisywany r´ ownaniami stanu ˙ x(t)= 0 1 -1 2 ! x(t)+ 1 0 0 -1 ! u(t), y(t)= -1 0 0 1 ! x(t). sterowanie ✲ Urz¸ adzenie steruj¸ ace Obiekt sterowania US OS wyj´ scie ✲ R´ ownanie warto´ sci w lasnych macierzy stanu uk ladu otwartego: det(sI - A)=0 ⇒ (s - 1) 2 =0 ⇒ s 1,2 = 1. Dwukrotna warto´ s´ c w lasna w prawej p´ o lp laszczy´ znie zmiennej zespolonej s implikuje niestabilno´ s´ c uk ladu otwar- tego. 1
Transcript of Algorytmy syntezy uk lad ow...

Algorytmy syntezy uk ladow sterowania
Literatura: T. Kaczorek, Teoria sterowania, t.1 i 2, PWN, W-wa 1980; T.
Kaczorek, Teoria sterowania i systemow, PWN, W-wa, 1996.
u(t) y(t)-
Obiekt sterowania Obserwator stanuv(t)
--
-
?
x(t) z(t)
Niech bedzie dany uk lad sterowania taki, ze nie wszystkie jego zmienne
stanu sa bezposrednio dostepne (mierzalne). Uk lad pozwalajacy odtworzyc na
podstawie znajomosci sterowania i wyjscia niedostepne zmienne stanu nazywa
sie obserwatorem stanu.
Stabilizowalnosc uk ladow sterowania. Dobor sprzezenia zwrot-
nego
Niestabilny otwarty uk lad sterowania opisywany rownaniami stanu
x(t) =
(0 1
−1 2
)x(t) +
(1 0
0 −1
)u(t), y(t) =
(−1 0
0 1
)x(t).
sterowanie-
Urzadzenie sterujace Obiekt sterowania
US OSwyjscie
-
Rownanie wartosci w lasnych macierzy stanu uk ladu otwartego: det(sI −A) = 0 ⇒ (s − 1)2 = 0 ⇒ s1,2 = 1. Dwukrotna wartosc w lasna w prawej
po lp laszczyznie zmiennej zespolonej s implikuje niestabilnosc uk ladu otwar-
tego.
1
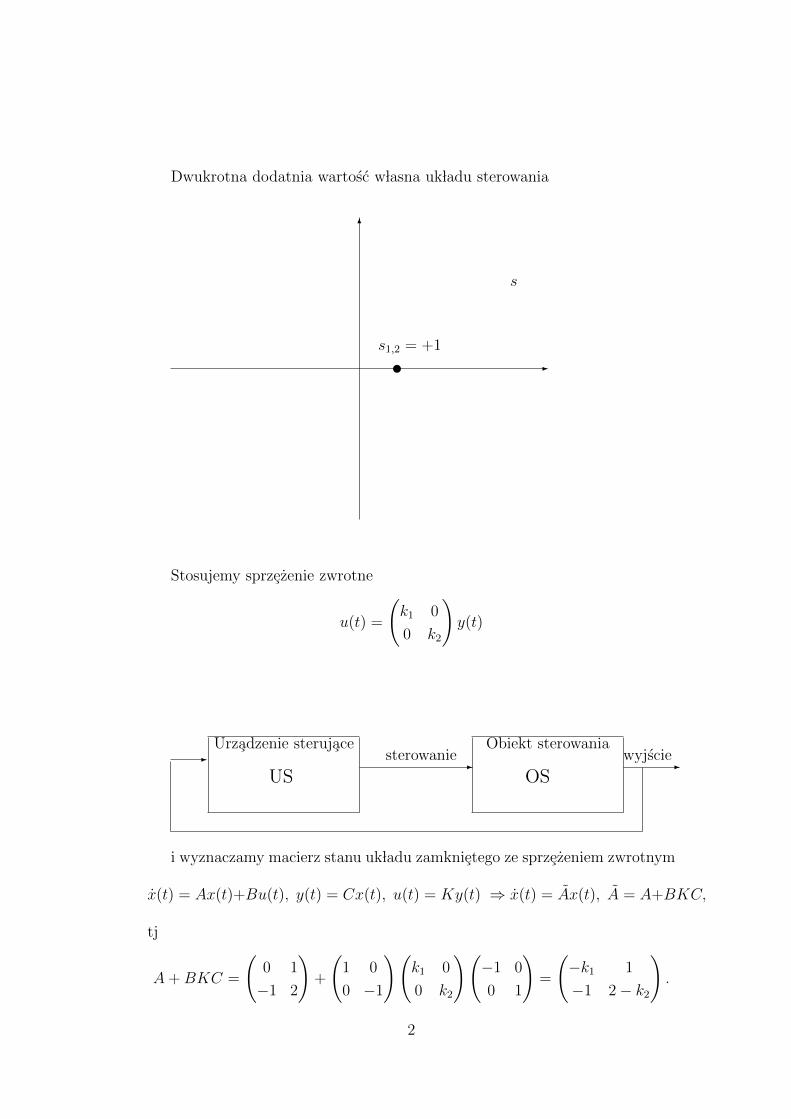
Dwukrotna dodatnia wartosc w lasna uk ladu sterowania
-
6
us1,2 = +1
s
Stosujemy sprzezenie zwrotne
u(t) =
(k1 0
0 k2
)y(t)
sterowanie-
Urzadzenie sterujace Obiekt sterowania
US OSwyjscie
--
i wyznaczamy macierz stanu uk ladu zamknietego ze sprzezeniem zwrotnym
x(t) = Ax(t)+Bu(t), y(t) = Cx(t), u(t) = Ky(t) ⇒ x(t) = Ax(t), A = A+BKC,
tj
A+BKC =
(0 1
−1 2
)+
(1 0
0 −1
)(k1 0
0 k2
)(−1 0
0 1
)=
(−k1 1
−1 2− k2
).
2

Rownanie wartosci w lasnych uk ladu zamknietego przybiera postac
det(sI − A) = s2 + (k1 + k2 − 2)s+ k1(k2 − 2) + 1 = 0,
a warunki jego stabilnosci sa nastepujace
k1 + k2 − 2 > 0, k1(k2 − 2) + 1 > 0.
Dla k1 = 0 i k2 = 4 wartosci w lasne uk ladu zamknietego sa postaci s1,2 =
−1. Uk lad zamkniety jest stabilny ze stopniem stabilnosci η = 1. Procesy
przejsciowe zanikaja w uk ladzie nie wolniej niz Cte−t.
Dwukrotna ujemna wartosc w lasna uk ladu sterowania
-
6
u
s
s1,2 = −1
Dla k1 = 2 i k2 = 4 wartosci w lasne uk ladu zamknietego sa postacis1,2 =
−2± . Uk lad zamkniety jest stabilny ze stopniem stabilnosci η = 2. Procesy
przejsciowe zanikaja w uk ladzie nie wolniej niz Ce−2t. Pojawiaja sie jednak
przebiegi oscylacyjne z oscylacyjnoscia
µ.= max
1≤i≤n|Im(si)|/|Re(si)| = 0.5.
3

Chcac zapewnic duzy stopien stabilnosci i ma la oscylacyjnosc uk ladu stero-
wania analizujemy zagadnienie przesuwania wartosci w lasnych macierzy stanu
uk ladu.
Przesuwanie wartosci w lasnych macierzy stanu uk ladu
Wektor stanu i wektor sterowania maja taki sam wymiar
Pierwotny uk lad sterowania zaprojektowany na podstawie fizyko-chemicznego
modelu obiektu sterowania i informacji o zadaniu sterowania, jakie stawiane
jest w odniesieniu do danego obiektu, moze nie wykazywac dobrych w lasnosci
dynamicznych. Ma la zmiana parametrow uk ladu powoduje utrate jego sta-
bilnosci (uk lad ma ma ly stopien stabilnosci), w uk ladzie obserwowane sa szko-
dliwe dla uk ladu przebiegi oscylacyjne o duzej amplitudzie i czestotliwosci, a
wielkosc zadajaca (jesli uk lad ma cechy uk ladu sledzacego) jest odtwarzana na
wyjsciu uk ladu z ma la dok ladnoscia.
W zwiazku z tym nasuwa sie pytanie, jak zmodyfikowac uk lad sterowania
opisywany rownaniem stanu
x(t) = Ax(t) +Bu(t), x(t) ∈ Rn, u(t) ∈ Rn,
aby poprawic jego w lasnosci dynamiczne. Rozwazymy zadanie modyfikacji
uk ladu sterowania przy nastepujacych za lozeniach:
• macierz sterowania B jest nieosobliwa,
• wszystkie sk ladowe wektora stanu sa dostepne tj. C = I,
• wartosci w lasne s1, ..., sn macierzy stanu A sa jednokrotne.
Oczywiscie rozwazany uk lad jest sterowalny i obserwowalny. Nalezy tak
zmodyfikowac pierwotny uk lad sterowania, aby wartosci w lasne macierzy stanu
uk ladu zmodyfikowanego mia ly z gory zadane wartosci
sM1 , sM2 , ..., s
Mn .
4
-
6
u u
u
us
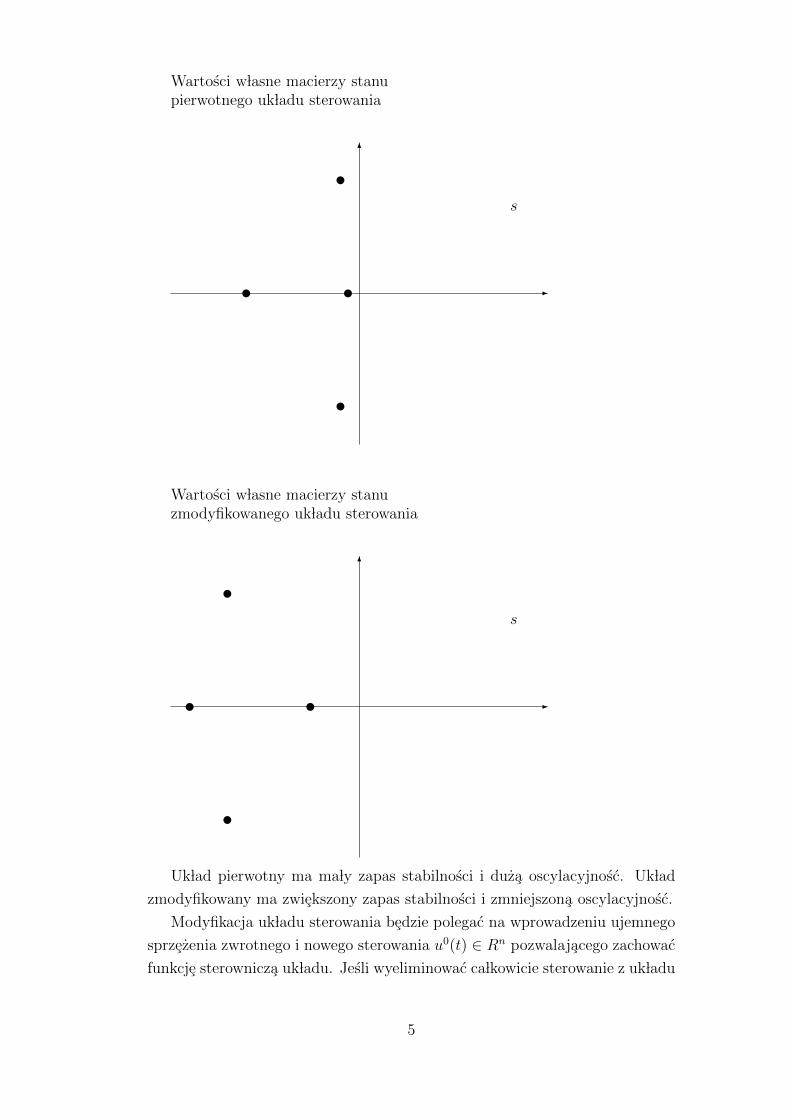
Wartosci w lasne macierzy stanupierwotnego uk ladu sterowania
-
6
u u
u
us
Wartosci w lasne macierzy stanuzmodyfikowanego uk ladu sterowania
Uk lad pierwotny ma ma ly zapas stabilnosci i duza oscylacyjnosc. Uk lad
zmodyfikowany ma zwiekszony zapas stabilnosci i zmniejszona oscylacyjnosc.
Modyfikacja uk ladu sterowania bedzie polegac na wprowadzeniu ujemnego
sprzezenia zwrotnego i nowego sterowania u0(t) ∈ Rn pozwalajacego zachowac
funkcje sterownicza uk ladu. Jesli wyeliminowac ca lkowicie sterowanie z uk ladu
5

determinujac jego przebieg za pomoca sprzezenia zwrotnego, to uk lad staje sie
uk ladem autonomicznym, ktory sam okresla ewolucje swojej dynamiki.
u(t)-
Obiekt sterowaniaPierwotny uk lad sterowania
OSx(t)
-
uM(t)x --
Sprzezenie zwrotne Obiekt sterowania
SP OSxM(t)
--
Zmodyfikowany uk lad sterowaniau0(t)
?+
−
Dla uk ladu zmodyfikowanego uzyskujemy rownania
xM(t) = AxM(t) +BuM(t), uM(t) = u0(t)−KspxM(t), (∗),
gdzieKsp ∈ Rn×n jest poszukiwana macierza sprzezenia zwrotnego od stanu
do sterowania.
Po oznaczeniu
uMB (t).= BuM(t)
rownanie (*) przyjmie postac
xM(t) = AxM(t) + uMB (t).
Stosujemy przekszta lcenie diagonalizujace
xM(t) = PxM(t),
gdzie macierz P jest utworzona z wektorow w lasnych macierzy A. Dla
xM(t) uzyskujemy rownanie
˙xM(t) = P−1APxM(t) + P−1uMB (t)
6

tj.
˙xM(t) = diag1≤i≤n(si)xM(t) + uMB (t), uMB (t)
.= P−1uMB (t), (∗∗).
Narzucamy na wielkosc uMB (t) warunek
uMB (t) = P−1Bu0(t)− diag1≤i≤n(sMi )xM(t), (∗ ∗ ∗).
Po podstawieniu do rownania (**) mamy
˙xM(t) = diag1≤i≤n(si − sMi )xM(t) + P−1Bu0(t).
Poniewaz chcemy, aby macierz stanu uk ladu zmodyfikowanego mia la wartosci
w lasne sMi , wiec musi byc si − sMi = sMi tj. sMi = si − sMi , i = 1, ..., n.
Tak wiec
˙xM(t) = diag1≤i≤n(sMi )xM(t) + P−1Bu0(t).
Biorac pod uwage zaleznosc xM(t) = P−1xM(t) mamy
P−1xM(t) = diag1≤i≤n(sMi )P−1xM(t) + P−1Bu0(t).
i
xM(t) = Pdiag1≤i≤n(sMi )P−1xM(t) +Bu0(t).
Natomiast dla wyrazenia uMB (t) mamy
uMB (t) = PuMB (t)
i z warunku (***) uzyskujemy
uMB (t) = Bu0(t)− Pdiag1≤i≤n(sMi )xM(t),
uMB (t) = Bu0(t)− Pdiag1≤i≤n(sMi )P−1xM(t),
BuM(t) = Bu0(t)− Pdiag1≤i≤n(sMi )P−1xM(t)
i ostatecznie
7

uM(t) = u0(t)−B−1Pdiag1≤i≤n(sMi )P−1xM(t).
Porownujac to wyrazenie z wyjsciowym rownaniem dla sterowania uM(t)
wnioskujemy, ze
Ksp = B−1Pdiag1≤i≤n(sMi )P−1, (∗ ∗ ∗∗).
Z powyzszego rozumowania wynika nastepujacy
Algorytm syntezy zmodyfikowanego uk ladu sterowania:
• okreslic macierz diagonalna z elementami sMi = si − sMi ,
• wyznaczyc przekszta lcenie diagonalizujace P dla macierzy stanu A i jego
odwrotnosc P−1,
• obliczyc macierz odwrotna B−1,
• wyznaczyc poszukiwana macierz sprzezenia zwrotnego ze wzoru (****).
Przyk lad: Pierwotny uk lad sterowania opisywany jest rownaniem stanu
x(t) =
(0 1
−12 −7
)x(t) +
(0 1
1 2
)u(t).
Wartosci w lasne macierzy stanu A uk ladu pierwotnego okreslone przez
rownanie
det(sI − A) = s2 + 7s+ 12 = 0
sa rowne s1 = −3, s2 = −4.
Stosujac sprzezenie zwrotne w funkcji wektora stanu nalezy uk lad zmody-
fikowac tak, aby uzyskac wartosci w lasne macierzy stanu uk ladu zmodyfiko-
wanego rowne s1 = −5, s2 = −7.
Obliczamy pomocnicza macierz diagonalna diag1≤i≤n(sMi ) = diag(2, 3).
Znajdujemy przekszta lcenie diagonalizujace macierzy A z rownan dla jej
wektorow w lasnych
(s1I − A)P1 =
(−3 −1
12 4
)(P 11
P 21
)= 0
oraz
(s2I − A)P2 =
(−4 −1
12 3
)(P 12
P 22
)= 0
8

Stad
P =
(1 1
−3 −4
), P−1 =
(4 1
−3 −1
).
Okreslamy macierz
B−1 =
(−2 1
1 0
)oraz macierz sprzezenia zwrotnego
Ksp = B−1Pdiag1≤i≤n(sMi )P−1 =
(−2 1
1 0
)(1 1
−3 −4
)(2 0
0 3
)(4 1
−3 −1
)
=
(14 8
−1 −1
)
Synteza jednowymiarowego wejsciowo-wyjsciowego
uk ladu sterowania o zadanych biegunach i zerach
Niech bedzie dany jednowymiarowy wejsciowo-wyjsciowy uk lad sterowania
opisywany transmitancja
G0(s) =L0(s)
M0(s),
gdzie
L0(s) = cn−1sn−1+cn−2s
n−2+...+c1s+c0, M0(s) = sn+an−1sn−1+...+a1s+a0.
Inaczej mowiac jednowymiarowy wejsciowo-wyjsciowy uk lad sterowania opi-
sywany jest rownaniem rozniczkowym n-tego rzedu
cn−1un−1(t)+cn−2u
n−2(t)+...+c1u(t)+c0 = anyn(t)+an−1y
n−1(t)+...+a1y(t)+a0.
Przechodzimy do opisu uk ladu w przestrzeni stanu zachowujac sterowanie pier-
wotne
u(t).= u(t)
i wybierajac w charakterze zmiennych stanu wielkosci
9

x1(t).= y(t), x2(t)
.= y(1)(t), ..., xn(t)
.= y(n−1)(t),
a w charakterze zmiennych wyjsciowych wielkosci
y1(t).= y(t), y2(t)
.= y(1)(t), ..., yn−1(t)
.= y(n−1).
Opis uk ladu w przestrzeni stanu przybierze postac
x(t) = Ax(t) + bu(t), y(t) = cx(t),
gdzie
A =
0 1 0 ... 0 0
0 0 1 ... 0 0
... ... ... ... ... ...
0 0 0 ... 0 1
−a0 −a1 −a2 ... −an−2 −an−1
, b =
0
0
...
0
1
, c =(c0 c1 ... cn−1
).
Macierz A w powyzszym opisie jest tzw. macierza Frobeniusa, a macierz
stanu tej postaci nazywa si postacia kanoniczna sterowalna.
Opis uk ladu za pomoca transmitancji operatorowej G0(s) jest zwiazany z
opisem w przestrzeni stanu zaleznoscia
G0(s) = c(sI − A)−1b =c((sI − A)adb
det(sI − A).
Z porownania opisow wynika, ze
L0(s) = c(sI − A)adb, M0(s) = det(sI − A).
Zak ladamy dostepnosc wszystkich zmiennych stanu i poszukujemy sprzezenia
zwrotnego od stanu do sterowania okreslonego macierza wierszowa
ksp = (k1sp, k2sp, ..., knsp)
oraz po laczenia rownoleg lego na wyjsciu okreslonego macierza wierszowa
kr = (k1r, k2r, ..., knr).
Uk lad zmodyfikowany jest opisany w przestrzeni stanu rownaniami
xM(t) = AxM(t) + buM(t), uM(t) = u0(t)− kspxM(t), y(t) = (c+ kr)xM(t),
10

przy czym u0(t) jest nowym sterowaniem zewnetrznym. Oznaczmy transmi-
tancje operatorowa uk ladu zmodyfikowanego jako
G(s) =L(s)
M(s),
gdzie
L(s) = cn−1sn−1+ccn−2s
n−2+...+c1s+c0, M(s) = sn+an−1sn−1+...+a1s+a0.
Nalezy tak dobrac macierz sprzezenia zwrotnego i po laczenia rownoleg lego,
aby bieguny
sM1 , sM2 , ..., s
Mn
i zera
szM1 , szM2 , ..., szMn
transmitancji operatorowej uk ladu zmodyfikowanego mia ly z gory zadane wartosci.
11
-
6
u e u
u
us
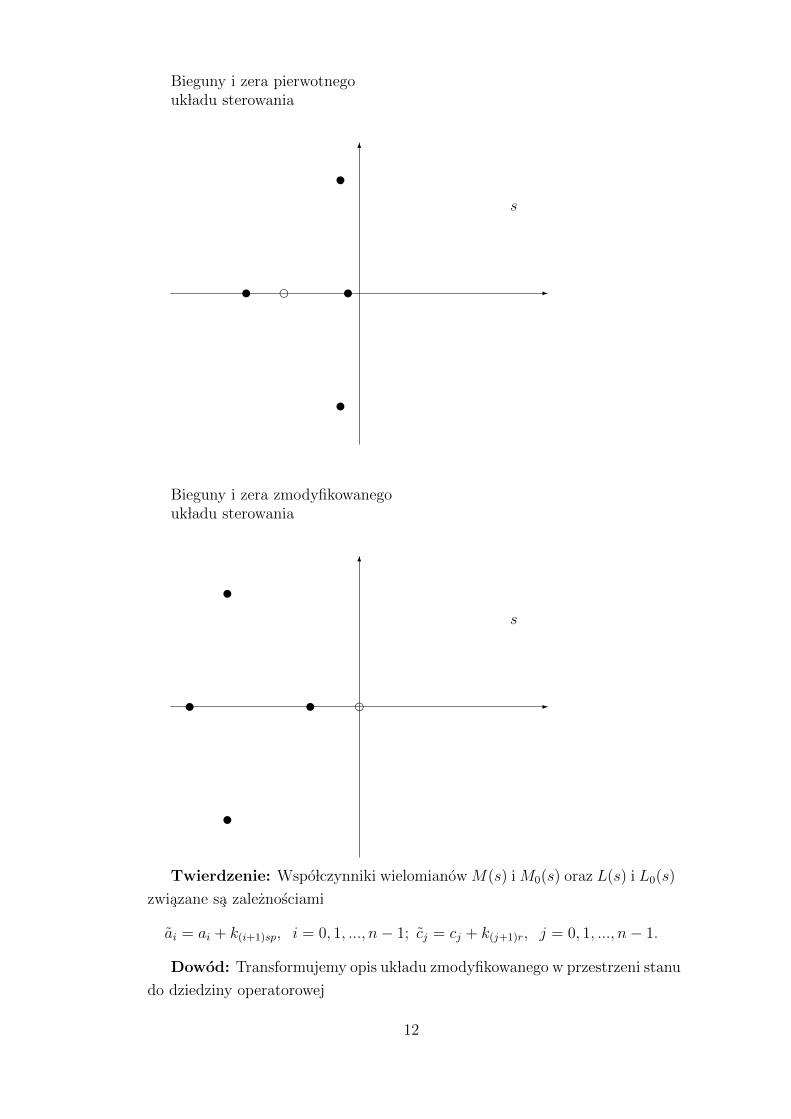
Bieguny i zera pierwotnegouk ladu sterowania
-
6
u eu
u
us
Bieguny i zera zmodyfikowanegouk ladu sterowania
Twierdzenie: Wspo lczynniki wielomianow M(s) i M0(s) oraz L(s) i L0(s)
zwiazane sa zaleznosciami
ai = ai + k(i+1)sp, i = 0, 1, ..., n− 1; cj = cj + k(j+1)r, j = 0, 1, ..., n− 1.
Dowod: Transformujemy opis uk ladu zmodyfikowanego w przestrzeni stanu
do dziedziny operatorowej
12

(sI − A)XM(s) = bU(s), U(s) = U0(s)− kspXM(s), Y (s) = (c+ kr)XM(s).
Obliczamy G(s) = Y (s)/U(s) uzyskujac
G(s) =(c+ kr)(sI − A)−1b
1 + ksp(sI − A)−1b
=(c+ kr)(sI − A)adb
(1 + ksp(sI − A)−1b)det(sI − A).
Tak wiec
L(s) = (c+ kr)(sI − A)adb = c(sI − A)adb+ kr(sI − A)adb,
M(s) = (1 + ksp(sI − A)−1b)det(sI − A) = det(sI − A) + ksp(sI − A)adb.
Zaleznosci te, po porownaniu z wielomianami L0(s) iM0(s), przyjma postac
L(s) = L0(s) + kr(sI − A)adb, M(s) = M0(s) + ksp(sI − A)adb.
Z powyzszych zaleznosci wynika, ze bieguny transmitancji uk ladu zmodyfi-
kowanego zaleza tylko od elementow macierzy sprzezenia zwrotnego ksp, a zera
tej transmitancji zaleza tylko od elementow macierzy po laczenia rownoleg lego
kr.
Wprowadzajac oznaczenie
(sI − A)adb =
D1n
D2n
...
Dnn
mozna zapisac wyrazenia
ksp(sI − A)adb =∑
1≤i≤n
kispDin, kr(sI − A)adb =∑
1≤i≤n
kirDin.
Ze specjalnej struktury macierzy (sI − A)ad wynika, ze Din = si−1, i =
1, ..., n (obliczanie Din sprowadza sie do obliczania wyznacznikow macierzy
o strukturze trojkatnej z uwzglednieniem znaku dope lnienia algebraicznego).
Ostatecznie zaleznosci miedzy wielomianami M0(s) i M(s) oraz L0(s) i L(s)
przybieraja postac
13

M(s) = M0(s) +∑
1≤i≤n
kispsi−1, L(s) = L0(s) +
∑1≤i≤n
kirsi−1,
co oznacza, ze
ai = ai + k(i+1)sp (i = 1, ..., n− 1), cj = cj + k(j+1)r.
Na tej podstawie okreslamy
Algorytm syntezy zmodyfikowanego wejsciowo-wyjsciowego uk ladu
sterowania:
• majac dane bieguny sM1 , ..., sMn i zera szM1 , ...szMn transmitancji uk ladu
zmodyfikowanego wyznaczyc wspo lczynniki aj, ci wielomianow M(s) i L(s) ze
wzoru
G(s) =(s− szM1 ) · ... · (s− szMn )
(s− sM1 ) · ... · (s− sMn ).
• wyznaczyc poszukiwane wspo lczynniki macierzy sprzezenia zwrotnego i
po laczenia rownoleg lego z zaleznosci
kisp = ai−1 − ai−1 (i = 1, ..., n), kjr = cj−1 − cj−1 (j = 1, ..., n).
Przyk lad: Jest dany wejsciowo-wyjsciowy uk lad sterowania o transmitancji
operatorowej
G0(s) =2s+ 3
(s+ 1)(s+ 6)=
2s+ 3
s2 + 7s+ 6,
a wiec s1 = −1, s2 = −6, sz1 = −3/2 i
a1 = 7, a0 = 6, c1 = 2, c0 = 3.
Nalezy okreslic elementy macierzy sprzezenia zwrotnego ksp = (k1sp, k2sp) i
macierzy po laczenia rownoleg lego kr = (k1r, k2r) tak, aby transmitancja uk ladu
zmodyfikowanego mia la bieguny s1 = −8, s2 = −10 i zero sz1 = 0.
Wyznaczamy wspo lczynniki ai, cj:
G(s) =s
(s+ 8)(s+ 10)=
s
s2 + 18s+ 80,
14

a wiec
a1 = 18, a0 = 80, c1 = 1, c0 = 0.
Nastepnie wyznaczamy poszukiwane elementy macierzy ksp i kr z zaleznosci
k1sp = a0 − a0 = 80− 6 = 74, k2sp = a1 − a1 = 18− 7 = 11,
k1r = c0 − c0 = 0− 3 = −3, k2r = c1 − c1 = 1− 2 = −1.
Dostepnosc tylko czesci zmiennych stanu
Za lozmy, ze tylko czesc zmiennych stanu jest dostepnych bezposrednio,
przy czym dana jest zaleznosc wiazaca wektor dostepnych zmiennych stanu z
wektorem stanu postaci
zM(t) = C1xM(t), C1 ∈ Rm×n,
gdzie
C1 =
1 0 ... 0 0 ... 0
0 1 ... 0 0 ... 0
... ... ... ... ...
0 0 ... 1 0 ... 0
Nalezy okreslic macierz wierszowa sprzezenia zwrotnego ksp = (k1sp k2sp ... kmsp)
i macierz po laczenia rownoleg lego kr = (k1r k2r ... kmr) uk ladu tak, aby bie-
guny
sM1 , sM2 , ..., s
Mn
i zera
szM1 , szM2 , ..., szMn
transmitancji operatorowej uk ladu zmodyfikowanego mia ly z gory zadane wartosci.
Uk lad zmodyfikowany opisywany jest w przestrzeni stanu rownaniami
xM(t) = AxM(t) + buM(t), uM(t) = u0(t)− kspzM(t), y(t) = (c+ kr)zM(t),
przy czym u0(t) jest nowym sterowaniem zewnetrznym.
Z rownan tych wyznaczamy analogicznie do poprzedniego przypadku zaleznosci
miedzy wielomianami M(s) i M0(s) oraz L(s) i L0(s) o postaci
M(s) = M0(s) + kspC1(sI − A)adb,
15

L(s) = L0(s) + krC1(sI − A)adb.
Elementy macierzy wierszowych ksp i kr dobieramy tak, aby spe lnione by ly
zaleznosci
M(sMi ) = 0, i = 1, ..., n; L(szMi ) = 0, i = 1, ...,m.
Z ostatnich zaleznosci uzyskujemy uk lady rownan:
GspkTsp = Msp, Grk
Tr = Lr,
gdzie
Gsp =
(C1(sM1 I − A)b)T
...
(C1(sMm I − A)b)T
, Gr =
(C1(szM1 I − A)b)T
...
(C1(szMm I − A)b)T
,
oraz
Msp = −
M0(sM1 )
...
M0(sMm )
, Lr = −
L0(szM1 )
...
L0(szMm
.
Poniewaz macierze Gsp i Gr sa nieosobliwe jako macierze Vandermonde’a,
wiec poszukiwane macierze wierszowe mozna jednoznacznie wyjasnic.
Przyk lad: Niech transmitancja uk ladu pierwotnego ma postac
G0(s) =c1s+ c0
s2 + a1s+ a0.
Uk lad ten w przestrzeni stanow opisuja rownania
x(t) =
(0 1
−a0 −a1
)x(t) +
(0
1
)u(t), y(t) =
(c0 c1
)x(t).
Za lozmy, ze dostepna jest tylko zmienna stanu x1. Dla wielomianow L(s)
i M(s) uszyskujemy wyrazenia
L(s) = c1s+ c0 + kr, M(s) = s2 + a1s+ a0 + ksp.
Transmitancja uk ladu zmodyfikowanego ma jedno zero
szM1 = −c0 + krc1
16

i dwa bieguny
sM1,2 = −0.5a1 ± 0.5(a21 − 4(a0 + ksp))1/2.
Wzory te pozwalaja okreslic wspo lczynniki ksp i kr przesuwajace zero i
bieguny uk ladu w zadane po lozenia.
17
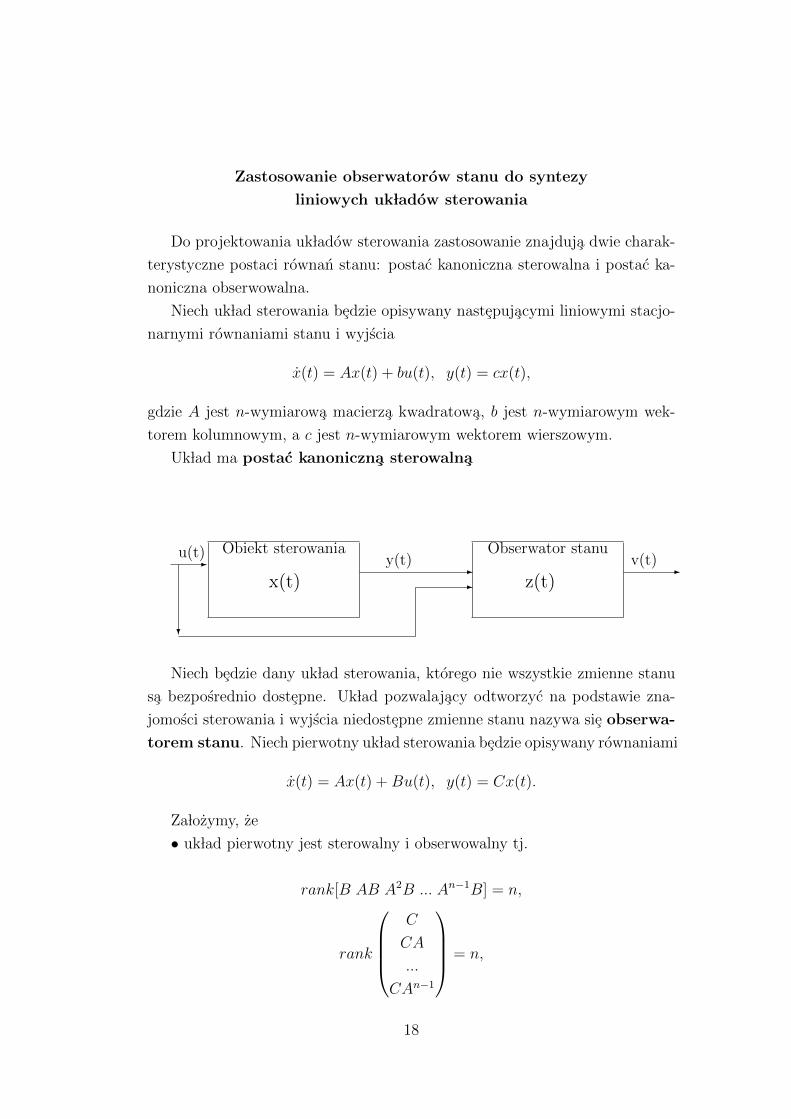
Zastosowanie obserwatorow stanu do syntezy
liniowych uk ladow sterowania
Do projektowania uk ladow sterowania zastosowanie znajduja dwie charak-
terystyczne postaci rownan stanu: postac kanoniczna sterowalna i postac ka-
noniczna obserwowalna.
Niech uk lad sterowania bedzie opisywany nastepujacymi liniowymi stacjo-
narnymi rownaniami stanu i wyjscia
x(t) = Ax(t) + bu(t), y(t) = cx(t),
gdzie A jest n-wymiarowa macierza kwadratowa, b jest n-wymiarowym wek-
torem kolumnowym, a c jest n-wymiarowym wektorem wierszowym.
Uk lad ma postac kanoniczna sterowalna
u(t) y(t)-
Obiekt sterowania Obserwator stanuv(t)
--
-
?
x(t) z(t)
Niech bedzie dany uk lad sterowania, ktorego nie wszystkie zmienne stanu
sa bezposrednio dostepne. Uk lad pozwalajacy odtworzyc na podstawie zna-
jomosci sterowania i wyjscia niedostepne zmienne stanu nazywa sie obserwa-
torem stanu. Niech pierwotny uk lad sterowania bedzie opisywany rownaniami
x(t) = Ax(t) +Bu(t), y(t) = Cx(t).
Za lozymy, ze
• uk lad pierwotny jest sterowalny i obserwowalny tj.
rank[B AB A2B ... An−1B] = n,
rank
C
CA
...
CAn−1
= n,
18

• rzad macierzy C jest rowny q, q < n.
Do uk ladu do laczamy obserwator stanu opisany rownaniami
z(t) = A0z(t) +B0u(t) +B1y(t), v(t) = C0z(t) + C1y(t),
przy czym
z(t), v(t) sa odpowiednio n−q-wymiarowym wektorem stanu i n-wymiarowym
wektorem wyjsc obserwatora, a A0, B0, B1, C0, C1 sa macierzami sta lymi.
Podamy warunki, przy spe lnieniu ktorych obserwator stanu bedzie odtwarza l
wektor stanu uk ladu pierwotnego.
Niech H bedzie sta la macierza o wymiarach (n− q)×n. Biorac pod uwage
rownania uk ladu pierwotnego rownania obserwatora mozna napisac rownanie
z(t)−Hx(t) = A0z(t)− (HA−B1C)x(t) + (B0 −HB)u(t). (∗)
Jezeli macierze H, A0, B0, B1 dobierzemy tak, aby zachodzi ly rownosci
A0H = HA−B1C, B0 = HB,
to rownanie (*) przyjmie postac
e(t) = A0e(t), e(t).= z(t)−Hx(t). (∗∗)
Rozwiazanie rownania (**) jest postaci
e(t) = exp(A0t)e(0).
Jezeli wartosci w lasne macierzy A0 leza w lewej po lp laszczyznie, to dla dowol-
nych warunkow poczatkowych
z(t)→ Hx(t), t→∞.
Narzucajac rownosc
(C0 C1
)(HC
)= In, (∗ ∗ ∗)
uzyskujemy warunek odtwarzania stanu
v(t)→ x(t), t→∞.
Rownosc (***) mozna przedstawic w postaci rownowaznej
(A0 B1) = HA(C0 C1). (∗ ∗ ∗∗)
19

Z powyzszych rozwazan wynika nastepujacy
Algorytm syntezy obserwatora stanu:
• wybrac elementy macierzy H tak, aby (a) macierz(H
C
)
by la macierza nieosobliwa, a macierz A0 mia la zadane wartosci w lasne
po lozone w lewej po lp laszczyznie zmiennej zespolonej,
• korzystajac z warunku
(C0 C1
)(HC
)= In,
obliczyc macierz (C0 C1):
(C0 C1) =
(H
C
)−1
,
• obliczyc macierze A0 i B1 z warunku
(A0 B1) = HA(C0 C1).
• wyznaczyc macierz B0 z rownania B0 = HB.
Przyk lad: wyznaczyc obserwator stanu dla uk ladu sterowania
x(t) =
(−2 1
0 −1
)x(t) +
(0
1
)u(t), y(t) =
(1 0
)x(t).
Przyjmujemy macierz H w postaci H = [h 1].Macierz(H
C
)=
(h 1
1 0
)
jest macierza nieosobliwa. Wobec tego obliczamy
(C0 C1) =
(H
C
)−1
=
(0 1
1 −h
)oraz
(A0 B1) = HA(C0 C1) = (h− 1,−h(h+ 1)), B0 = HB = (1).
20

Niech macierz A0 ma miec poszukiwana wartosc w lasna rowna -3. Uzysku-
jemy to dla h = −2. Macierze zwiazane z opisem obserwatora stanu przybiora
postac
H = (−2, 1), A0 = (−3), B0 = (1), B1 = (−2), CT0 = (0 1), CT
1 = (1 2),
a obserwator opisany jest rownaniami
z(t) = −3z(t) + u(t)− 2y(t), v(t) = (0 1)T z(t) + (1 2)Ty(t).
Obserwatory stanu dyskretnych uk ladow sterowania
Jesli w uk ladzie dyskretnym nie wszystkie zmienne stanu sa dostepne, to
mozna zaprojektowac obserwator stanu uk ladu dyskretnego.
u(k) y(k)-
Obiekt sterowania Obserwator stanuv(k)
--
-
?
x(k) z(k)
Dla uk ladow dyskretnych istnieje mozliwosc zaprojektowania obserwatora
stanu o skonczonym czasie trwania procesow przejsciowych (the deadbeat
observer). Z rownaniami dyskretnego uk ladu sterowania
x(k + 1) = Ax(k) +Bu(k), y(k) = Cx(k)
wiazemy obserwator stanu uk ladu dyskretnego
z(k + 1) = A0z(k) +B0u(k) +B1y(k), v(k) = C0z(k) + C1y(k).
Jesli uda sie okreslic elementy macierzy rownan obserwatora tak, ze macierz
A0 bedzie l-nilpotentna tj. Al0 = 0, to b lad odtwarzania stanu bedzie zerowy
poczawszy od momentu l, gdyz
e(l) = Al0e(0) = 0.
21