13 Mechanika ćwiczenia I semestr
36
Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie” Akademia Morska w Szczecinie, ul. Waly Chrobrego 1-2, 70-500 Szczecin Materialy dydaktyczne Mechanika Semestr I Ćwiczenia
Transcript of 13 Mechanika ćwiczenia I semestr

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Materiały dydaktyczne
Mechanika
Semestr I
Ćwiczenia

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
8. Przedmiot: MECHANIKA Kierunek: Mechatronika
Specjalność: elektroautomatyka okrętowa Rozkład zajęć w czasie studiów – Studia pierwszego stopnia
Semestr Liczba tygodni w semestrze
Liczba godzin w tygodniu
Liczba godzin w semestrze Punkty
kredytowe A Ć L S Σ A Ć L S
I 15 – 2 – – 30 – 30 – – Razem w czasie studiów 30 – 30 – –
Treść zajęć wykładowych i ćwiczeniowych w semestrze I
Nr tematu
Tematy i ich rozwinięcie Razem W Ć
1 Podział, zadania i podstawowe pojęcia mechaniki ogólnej. Zasady statyki. Repetytorium z rachunku wektorowego.
4 2 2
2 Redukcja zbieżnego i równoległego układu sił. Para sił i jej wła-sności, moment pary sił (moment obrotowy).
4 2 2
3 Redukcja płaskiego układu sił: wektor główny i moment główny układu sił; redukcja tylko do wypadkowej lub tylko do pary sił.
4 2
2
4 Warunki równowagi statycznej płaskiego układu sił. 2 1 1 5 Moment siły względem osi, warunki równowagi statycznej prze-
strzennego układu sił. Środek sił równoległych. 4 2 2
6 Środek ciężkości ciał jednorodnych liniowych, płaskich i przestrzennych.
4 2 2
7 Momenty statyczne, bezwładności i dewiacji punktów material-nych i ciał o skończonych wymiarach (momenty geometryczne i masowe).
4 2 2
8 Rodzaje tarcia. Tarcie ślizgowe suche spoczynkowe i kinetyczne. Tarcie toczne. Tarcie w łożyskach tocznych.
6 3 3
9 Kinematyka punktu materialnego: równania ruchu i tor ruchu, prędkość i przyspieszenie punktu. Kinematyka punktu w ruchu po okręgu. Ruch harmoniczny punktu materialnego.
6 3 3
10 Kinematyka ciała doskonale sztywnego; ruch postępowy i obro-towy.
4 2 2
11 Kinematyka ciała sztywnego w ruchu płaskim: prędkości i przy-spieszenia ciała i jego punktów, chwilowy środek obrotu i środek przyspieszeń.
7 3 4
12 Podstawowe pojęcia teorii mechanizmów i maszyn (człon, para i łańcuch kinematyczny, ruchliwość, więzy)
2 2 -
13 Analiza kinematyczna mechanizmów (położenia i trajektorie, środek obrotu, prędkości i przyspieszenia członu i jego punktów). Mechanizmy dźwigniowe, krzywkowe, zębate.
5 2 3
14 Dynamika punktu materialnego: podstawowe pojęcia (w tym siła bezwładności), zadania i prawa dynamiki.
4 2 2
Razem 60 30 30

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Temat 1. Powtórzenie rachunku wektorowego.
Zagadnienia:
– Wielkości skalarowe i wektorowe. – Iloczyn skalarowy i wektorowy dwóch wektorów. – Moment siły względem punktu. – Twierdzenie Varignona.
Wielkości skalarowe i wektorowe.
Wielkości fizyczne skalarowe to takie, dla określenia których należy podać wyłącznie ich wartość liczbową, np. masa, czas, temperatura, ciepło, długość, odległość itp. Wielkości fizyczne wektorowe, inaczej skierowane, to takie, dla określenia których należy podać ich kierunek, zwrot, wartość liczbową i niekiedy punkt zaczepienia, w przypadku wektorów tzw. zacze-pionych. Wyróżnia się więc wektory:
– swobodne, które można równolegle przesuwać w przestrzeni, np. wektor momentu pary sił, wektor prędkości kątowej ciała w ruchu płaskim;
– posuwne, które można przesuwać jedynie wzdłuż ich ustalonej linii działania, np. wektor siły działającej na ciało doskonale sztywne, wektor prędkości kątowej i przyspieszenia kątowego ciała w ruchu obrotowym dokoła stałej osi;
– zaczepione, które są zaczepione w ściśle określonym punkcie przestrzeni, np. moment siły względem punktu, prędkość punktu materialnego.
Wartość wektora �� można określić za pomocą składowych w następujący sposób
|��| = � = ���� + �� + ��
AB � = ��
��
��� = ���� ; �� = ��� ; �� = �� �
Wektor w interpretacji geometrycznej przed-stawia się parą uporządkowanych punktów, np. A i B, z których A jest początkiem wekto-ra a B jest końcem wektora, i oznacza symbo-lem AB � lub ��. Rzutując wektor prostokątnie na osie układu OXYZ otrzymuje się wektory składowe ��� , ��, �� na osiach układu.
Wprowadza się tzw. wersory osi ��, � �, � �, tzn. wektory jednostkowe o kierunku i zwrocie odpowiedniej osi układu. Wektory składowe ��� , ��, �� można wówczas przedstawić w postaci
gdzie �� , �, � są składowymi wektora �� na osiach układu OXYZ.
O
X
Y
Z
��
��
���
A

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Wektory podlegają m.in. następującym prawom:
– Dodawania wektorów: �� + � � = ��
– Odejmowania wektorów: �� − � � = �� + �−� �� = ��
– Mnożenia przez liczbę: �� ∙ � = ��
Iloczyn skalarowy i wektorowy dwóch wektorów
Def. Iloczynem skalarowym dwóch wektorów �� i � � nazywa się skalar określony następująco �� ∙ � � = � ∙ � ∙ cos gdzie α jest miarą kąta zawartego między wektorami �� i � �. Iloczyn skalarowy jest rozdzielny względem dodawania i jest przemienny, tzn. �� ∙ � � = � � ∙ �� . Iloczyny skalarowe wersorów osi są następujące �� ∙ �� = �� ∙ �� = � � ∙ � � = 1 �� ∙ �� = �� ∙ � � = � � ∙ �� = 0 tzn. iloczyny skalarowe tych samych wersorów są równe 1, zaś różnych wersorów są równe 0. Tw. Łatwo wykazać, że iloczyn skalarowy dwóch wektorów �� = �� �� + � �� + �� � � � = �� �� + � �� + �� � można przedstawić za pomocą składowych tych wektorów w następujący sposób �� ∙ � � = ���� + ��+��. Tw. Warunkiem koniecznym prostopadłości dwóch wektorów jest zerowanie się ich iloczynu skalarowego.
Def. Iloczynem wektorowym dwóch wektorów �� i � � nazywa się wektor �� �� × � � = �� o następujących własnościach: - �� ⊥ �� % �� ⊥ � � ; - zwrot �� wynika z reguły śruby prawoskrętnej (wyznacza go kierunek ruchu translacyjnego śruby prawej przy obracaniu tej śruby zgodnie z ruchem nakładania wektora �� na wektor � � po kącie mniej-szym od półpełnego); - wartość wektora �� jest równa: |��| = � ∙ � ∙ sin = � ∙ ℎ = ), gdzie α jest miara kąta zawartego mię-dzy wektorami �� i � �, a P jest polem powierzchni równoległoboku zbudowanego na wektorach �� i � � .
�� �� ��
−� � ��
�� � � ��

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Iloczyn wektorowy jest rozdzielny względem dodawania, ale nie jest przemienny, tzn. �� × � � = −� � × �� Iloczyny wektorowe wersorów osi �� × �� = �� × �� = � � × � � =0 �� × �� = � � �� × � � = �� � � × �� = �� tzn. iloczyny wektorowe tych samych wersorów są równe 0, natomiast iloczyn dwóch kolejnych wer-sorów jest trzecim wersorem. Tw. Warunkiem koniecznym równoległości dwóch wektorów jest zerowanie się ich iloczynu wektorowe-go. Moment siły względem punktu Def. Momentem siły * � względem punktu O nazywa się wektor + �, o następujących własnościach: - + �, jest prostopadły do płaszczyzny utworzonej przez siłę -� i punkt O; - zwrot wektora momentu + �, wynika z reguły śruby prawoskrętnej (wyznacza go ruch translacyjny śruby prawej, przy jej obracaniu w kierunku wyznaczonym działaniem siły względem punktu O); - wartość momentu + �, określa wyrażenie .+ �,. = +, = .-�. ∙ ℎ ∙ sin = - ∙ ℎ ∙ sin [Nm] gdzie h jest ramieniem siły względem punktu O, a α jest miarą kata między promieniem wodzącym siły 3� a wektorem siły.
Można udowodnić twierdzenie: 4 �5 = 6 � × * � „Momentem siły względem punktu jest iloczyn wektorowy promienia wodzącego siły 6 � i wektora
siły * � (lecz nie w odwrotnej kolejności)”.
α O -�
3�
+ �,
h
-�
��
� �
��
h
P

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Twierdzenie Varignona.
Twierdzenie: „Moment sumy n sił zaczepionych w jednym punkcie jest równy sumie momentów tychże sił ”.
Twierdzenie to zostanie zastosowane do dwóch sił, będących składowymi siły -� leżącej w płaszczyź-nie OXY.
Zadanie 1.1.
Dane są dwa wektory sił: AB � i AC � o współrzędnych punktów wyznaczających te wektory: A(-2,-3,3), B(1,2,5), C(2,3,5). Należy:
a) Podać składowe wektorów AB � i AC � na osiach układu. b) Wyznaczyć składowe wektora wypadkowego tych sił. c) Wyznaczyć rzuty prostokątne wektorów tych sił na osie układu OXYZ. d) Znaleźć iloczyn skalarowy wektorów AB � i AC � wyrażony ich składowymi.
Zadanie 1.2.
Dany jest wektor siły AB � = (−3,3,2) o linii działania przechodzącej przez punkt C(1,1,0). Należy wyznaczyć moment siły AB � względem punktów O(0,0,0) i C(1,1,0). Kiedy moment wektora względem punktu jest równy 0? Jakimi wektorami są wektory momentów sił leżących w płaszczyźnie OXY, OXZ i OYZ względem punktów leżących w danej płaszczyźnie? Literatura: [1], rozdz. 7, str. 30÷33. [2], rozdz.2.6; rozdz. 7.4 i 7.5. [4], rozdz. 1, str. 9÷14.
Temat 2. Redukcja zbieżnego i równoległego układu dwóch sił.
Zagadnienia:
– Wyznaczanie wypadkowej układu zbieżnego i równoległego dwóch sił – Wyznaczanie sił reakcji podporowych. – Wyznaczanie sił wewnętrznych w cięgnach i prętach.
+ �, = (−-� ∙ <) ∙ � � + - ∙ = ∙ � � = = �- ∙ = − -� ∙ <� ∙ � � -�� = -� ∙ �� -� = - ∙ ��
Moment siły -� względem punktu O jest
równy sumie momentów sił składowych -��
i -� względem punktu O
gdzie:
x, y – współrzędne dowolnego punktu na
linii działania siły -�
Moment + �, leży na osi OZ (tutaj wchodzi za płaszczyznę rysunku).
X
Y
Z
y (x, y)
-�
-��
-�
�� �� � �
+ �,

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Przykład 2.1.
Ramię robota, pokazanego schematycznie na rysunku, unosi ładunek o ciężarze G = 250 N. Dane: AB = AC =1 m; BC=CD=1.1 m. Należy wyznaczyć siłę F z jaką siłownik AC działa na ramię BD w poło-żeniu pokazanym na poniższym schemacie i określonym powyższymi wymiarami.
Warunkiem wystarczającym równowa-gi trzech sił nierównoległych jest zamy-kanie się wieloboku tych sił. Rysujemy w pewnej skali wielobok sił: >�, ? �@A i ? ��A, przy czym dla siły >� zna-my jej kierunek, zwrot i wartość. Z pro-porcji długości wektorów >�, ? �@A i ? ��A wyznaczamy wartości sił ? �@A i ? ��A. Zwroty tych sił wyznacza obieg w wie-loboku sił zgodny ze zwrotem siły >�.
Skala sił: 200 N
? ��A
? �@A
>�
E
A
B
C
D
>�
1
2 3
? ��A
? �@A? ��A = −? �A�
Z kolei z zasady akcji i reakcji wynika, że siła ? ��A oddziaływania siłownika na ramię 1 jest wektorem przeciwnym do ? �A�, czyli
Kierunek siły ciężkości ładunku >� jest pionowy i przecina się w punkcie E z kierunkiem siły ? ��A. Na ramię 1 działa jeszcze trzecia siła ? �@A oddziaływania podstawy 3 w punkcie B. Z twierdzenia o równowadze trzech sił nierównoległych wynika, że siły te muszą być zbieżne, czyli kierunek siły ? �@A musi przechodzić przez punkt E.
Rozwiązanie: Zakładamy, że ramię 1 i siłownik 2 są nieważkie (ciężar ich jest pomijalnie mały w stosunku do ciężaru G ładunku). Na nieważki siłownik działają tylko dwie siły: siła ? �A� oddziaływania ramienia 1 i ? �@� oddziaływania podstawy 3. Na pod-stawie drugiej zasady statyki wiemy, że dwie siły pozostają w równowadze, jeżeli mają przede wszystkim ten sam kierunek. Stąd wynika, że kierunek sił ? �A� i ? �@� jest kierunkiem prostej AC.
A
? �A�
? �@�
B
C
D
>�
1
2 3

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Zadanie 2.2.
Podnośnik śrubowy ABCDE ma cztery doskonale sztywne ramiona o długości AB = BC = CD = DE = l = 0.3 m., połączone przegubowo w sposób pokazany na schemacie. Podnośnik obciążony jest w przegubie C pionową siłą ciężkości pojazdu G = 4000 N. Należy wyznaczyć siły wewnętrzne w ra-mionach AB, BC, CD i DE, oraz w śrubie BE w położeniu podnośnika, przy którym miara kąta α = 30⁰. Zadanie rozwiązać wykreślnie i analitycznie.
Zadanie 2.3.
Pozioma dźwignia zaworowa ABC silnika spalinowego, traktowana jako doskonale sztywna belka, podparta jest przegubowo w punkcie B. W punkcie końcowym C na dźwignię działa pionowa siła sprężyny -� o wartości F = 500 N. Należy wyznaczyć sposobem wykreślnym i analitycznym pionowe siły -�Bi -�C oddziaływania na dźwignię popychacza w punkcie A i przegubu w punkcie B. Dane: AB = 1.5 BC = 0.3 m.
Literatura: [4] rozdz. 2. str. 15÷33.
A B C
-�
A
B
C
D
E α
>�

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Temat 3. Redukcja płaskiego ogólnego układu sił.
Zagadnienia:
– Wektor główny i moment główny płaskiego układu sił. – Redukcja płaskiego układu tylko do wypadkowej; równanie linii działania wypadkowej.
Przykład 3.1.
Na płaski model kadłuba statku działa układ czterech sił: -�A, -��, -�@, -�D o wartościach liczbowych: F1= 50 N, F2 = 300 N, F3 = 200 N i F4 = 500 N oraz o liniach działania pokazanych na schemacie. Należy wyznaczyć:
a) wektor główny E �F i moment główny + �F podanego układu sił w punkcie O;
b) wypadkową E � (jeżeli istnieje) podanego układu sił, tzn. jej linię działania, zwrot i wartość.
Wyznaczamy moment główny w punkcie O
+ �F = +F � � = G +H,D
HIA � �
gdzie znak momentu jest dodatni, gdy działanie siły względem punktu O jest zgodne z kierunkiem nakładania pierwszej osi układu, tj. OX na oś drugą, tj. OY, po kącie mniejszym od półpełnego; w rozważany przypadku jest to kierunek w lewo, czyli
+F = -A ∙ sin 45° ∙ 3 − -� ∙ sin 45° ∙ 1 − -@ ∙ sin 60° ∙ 1 − -@ ∙ cos 60° ∙ 3 −
−-D ∙ 3 = −2079.3 [Nm] Ad. b) Wyznaczamy wypadkową układu sił Ponieważ wektor główny E �F nie jest wektorem zerowym, więc podany układ sił można zredukować
tylko do jednej siły wypadkowej E �
E � = E��� + E��
E �F = EF� �� + EF �� EF� = -A cos 45° + -� cos 45° − −-@ cos 60° + -D ≅ 647.5 [N] EF = -A sin 45° − -� sin 45° + +-@ sin 60° ≅ −3.57 [N]
Rozwiązanie: Ad. a) Wyznaczamy wektor główny w
punkcie O
gdzie:
X
Y
O
-�A
-��
-�@
-�D
�� ��
60⁰
45⁰
45⁰
1 2
1 2
3
-1
-3
-1
R �S
R � (0;3.21)

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
gdzie: E� = EF� = 647.5 [N], E = EF = −3.57 [N] Linia działania wypadkowej E � określona jest następującym równaniem w postaci kierunkowej
<(=) = EFEF� = − +FEF� ≅ − 3.57647.5 = − −2079.3647.5 ≅ −0.0055 = + 3.21
czyli wypadkowa E � będąc wektorem równoległym do wektora głównego E �F i o tym samym zwrocie jak wektor główny przechodzi przez punkt (0; 3.21).
Zadanie 3.2.
Na belkę podpartą na podporze stałej A i podporze przesuwnej B działają w sposób pokazany na schemacie: siła skupiona -� o wartości F = 100 kN, para sił T �A, T �� o wartości TA = T� = 50 kN i o ramieniu 2 m oraz obciążenie ciągłe trójkątne o maksymalnym natężeniu qmax = 100 kN/m. Należy wyznaczyć w punkcie O wektor główny E �F i moment główny + �F oraz wypadkową E � podanego układu sił (jeżeli istnieje).
Literatura: [4] rozdz. 3. str. 43÷59.
Temat 4. Warunki równowagi statycznej płaskiego układu sił.
Zagadnienia:
– wyznaczanie sił reakcji podporowych; – wyznaczanie sił wewnętrznych w prętach kratownic.
Przykład 4.1.
Kratownica dźwigara dachowego, pokazana schematycznie na rysunku poniżej, obciążona jest siłami skupionymi -�A, -�� i -�@ o wartościach liczbowych: -A = 100 kN, -� = 200 kN, -@ = 50 kN. Pręty kratownicy tworzą trójkąty równoboczne o boku 2m. Należy wyznaczyć:
e) siły reakcji w podporach A i B; f) siły wewnętrzne w prętach kratownicy metodą wydzielania węzłów sposobem wykreślnym i
analitycznym; g) siły wewnętrzne we wskazanych gwiazdką prętach kratownicy metodą przecięć Rittera.
2 m
X
Y
A=O B
qmax
2 m 2 m
45⁰
-� T �A
T ��

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Rozwiązanie: Ad a) Wyznaczamy siły reakcji w podporach A i B.
Uwalniamy myślowo kratownicę od więzów i w ich miejsce wstawiamy siły reakcji podporowych. W nieprzesuwnej (stałej) podporze A są w ogólności dwie składowe siły reakcji: ? �B� i ? �B, natomiast w
przesuwnej podporze B jest tylko jedna (tutaj pionowa) składowa ? �C.
Piszemy równania równowagi statycznej wszystkich sił czynnych i sił reakcji podporowych działają-cych na całą kratownicę; w równaniu momentów sił zakłada się, że moment działający w prawo jest dodatni G -H� = -@ + ?B� − -A cos 45° = 0
G -H = ?B − -A sin 45° + ?C − -� = 0
G +H, = −-@ √3 − -A sin 45° ∙ 2 + ?C ∙ 4 − -� ∙ 6 = 0
skąd otrzymuje się wartości sił reakcji podporowych: ?B� = -A cos 45° − -@ = 50√2 − 50 = 50 �√2 − 1� ≅ 20.71 [kN]
X
Y
A=O B 45⁰
2 m 2 m 2 m 2 m
-�A -��
-�@
? �B�
? �B ? �C
X
Y
A=O B 45⁰
2 m 2 m 2 m 2 m
-�A -��
-�@

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
?C = 32 -� + √34 -@ + √24 -A ≅ 357 [kN] ?B = -A sin 45° − ?C + -� ≅ −86.3 [kN] Ad b) Wyznaczamy siły wewnętrzne w prętach metodą wydzielania węzłów.
Oznaczamy węzły cyframi rzymskimi a pręty – cyframi arabskimi.
Sprawdzamy jeszcze warunek konieczny statycznej rozwiązywalności kratownicy płaskiej: 2 · w = 2 · 9 = 18 = p + 3 = 15 +3 = 18
gdzie w jest liczbą węzłów : w = 9, a p jest liczbą prętów: p = 15. Warunek ten jest spełniony i wystar-czający, aby kratownica była statycznie rozwiązywalna, gdyż każdy węzeł jest dołączony za pomocą tylko dwóch prętów. Rozwiązywanie kratownicy rozpoczyna się od węzła, w którym zbiegają się co najwyżej dwa pręty o nieznanych siłach wewnętrznych. Tutaj można więc zacząć od węzła I. Wydzielamy myślowo węzeł z kratownicy, zastępując przecięte pręty siłami wewnętrznymi S1 i S2. W sposobie graficznym budujemy zamknięty wielobok sił S1, S2 i -��, a w sposobie analitycznym piszemy równania równowagi sił działa-jących na węzeł I.
XA
X�
-��
Skala sił 100 N
60⁰
G -H� = −X� − XA cos 60° = 0
G -H = XA sin 60° − -� = 0
XA = -�sin 60° = 200 ∙ 2√3 ≅ 230.9 [kN] X� = −XA cos 60° = − 200 ∙ 2√3 ∙ 2 =
≅ −115.5 [kN]
stąd siły w prętach
Sposób graficzny Sposób analityczny
III ? �B�
? �B ? �C XA X� VII
IX I
II IV
V
VI VIII
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
X
Y
A=O B 45⁰
-�A -��
-�@

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Pręt 1 jest prętem rozciąganym a pręt 2 – ściskanym. Rozwiązujemy teraz kolejny węzeł tj. II, wydzie-lając go myślowo z kratownicy, potem węzeł III, itd. Należy oczywiście przyjąć zwrot siły S1 działają-cej na węzeł II, przeciwny do zwrotu tejże siły działającej na węzeł I. Stąd wyjątkowo nie zaznacza się symbolu wektora przy wektorach sił wewnętrznych w prętach kratownicy, budując wieloboki sił dla poszczególnych węzłów.
Ad. c) Wyznaczamy siły wewnętrzne w wybranych prętach kratownicy metodą Rittera.
Wyznaczając siły wewnętrzne w prętach kratownicy metodą wydzielania węzłów, należy rozpocząć rozwiązywanie od krańcowych węzłów. Metodą przecięć Rittera można w jednym kroku wyznaczyć siły w dowolnie wybranych prętach. Tutaj są to pręty 7 i 8.
Metoda ta przebiega w następujących etapach:
– Myślowo rozcina się w sposób zupełny kratownicę na dwie części. W zadaniu należy wyzna-czyć siły wewnętrzne w dwóch tylko prętach, jednakże zupełność przecięcia kratownicy na dwie oddzielne części, zmusza do przecięcia trzech prętów kratownicy (sposób przecięcia po-kazano na rysunku). Należy dodać, że liczba przeciętych prętów nie może być większa od trzech, gdyż dla dowolnego płaskiego układu sił można napisać co najwyżej trzy równania równowagi statycznej.
– Odrzuca się myślowo jedną z części kratownicy (tutaj wygodniej jest odrzucić lewą część, gdyż układ sił działających na część prawą jest prostszy) i w miejsce odrzuconych prętów przykłada się siły wewnętrzne X�Y, X�Z % X�[ w tych prętach. Zakłada się zwroty sił w prętach na zewnątrz przekroju, czyli zakłada się, że pręty są rozciągane.
– Formułuje się równania równowagi statycznej sił działających na tylko prawą część kratowni-cy
G +H\] = ?C ∙ 1 − -� ∙ 3 − XY ∙ √3 = 0
G +H] = X[ ∙ √3 + ?C ∙ 2 − -� ∙ 4 = 0
G -H = −XZ ∙ cos 30° + ?C − -� = 0
i wyznacza na ich podstawie wartości sił w wybranych prętach kratownicy
XY = ?C − -� ∙ 3√3 ≅ −140.3 [kN]
? �B�
? �B
III
? �C
VII
IX I
II IV
V
VI VIII
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
X
Y
A=O B 45⁰
-�A -��
-�@
XY
XZ
X[
2 m

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
XZ = ?C − -�cos 30° ≅ 181.3 [kN] X[ = -� ∙ 4 − ?C ∙ 2√3 ≅ 49.7 [kN]
Pręt 6 jest ściskany, natomiast pręty 7 i 8 są rozciągane.
Zadanie 4.2.
Doskonale sztywna belka ABC z przegubem w punkcie B jest utwierdzona w punkcie A i podparta na podporze przesuwnej w punkcie C. Na belce znajduje się wózek wciągarki, za pomocą której jest przyciągany ukośnie pod kątem 60⁰ względem poziomu ładunek o ciężarze F = 10000 N.
Literatura: [2] rozdz. 6. str. 118÷133; [4] rozdz. 3. str. 43÷73; rozdz. 4. str. 96÷100.
Temat 5. Wybrane zagadnienia przestrzennego układu sił.
Zagadnienia:
– moment siły względem osi; – warunki równowagi statycznej przestrzennego układu sił.
Przykład 5.1.
Dźwig portowy wspiera się na trzech podporach ABD, z których A jest unieruchomiona w kierunkach trzech osi OX, OY i OZ, podpora D jest unieruchomiona w kierunkach osi OY i OZ, natomiast podpo-ra B jest unieruchomiona tylko w kierunku osi OZ. Ciężar podstawy dźwigu w kształcie graniastosłu-pa o podstawie trójkąta równobocznego o boku 12 √3⁄ m wynosi G1 = 15000 N. Ciężar wysięgnika wynosi G2 = 10000 N. Dźwig przyciąga za pomocą liny EK nachylonej do pionu pod kątem α ładunek siłą F = 5000 N. Należy wyznaczyć siły reakcji w podporach A, D i B.
Należy wyznaczyć: - Siły oddziaływania kół wózka wciągarki na belkę w punktach D i E - Siły reakcji w podporach A i C - Siły wzajemnego oddziaływania lewej i prawej części belki w przegubie B
A B C D E
3 m 1 m 1 m 7 m
-�
0.2 m

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Rozwiązanie:
Z treści zadania wynika, że w podporze A umiejscowionej w punkcie O wystąpią trzy niewiadome składowe siły reakcji: ? �B� , ? �B, ? �B, w podporze D – dwie niewiadome składowe siły reakcji: ? �_, ? �_ a w podporze B jedna niewiadoma składowa siły reakcji ? �C, czyli łącznie sześć niewiado-mych. Warunkiem równowagi przestrzennego układu sił jest zerowanie się sumy rzutów wszystkich sil czynnych na trzech osiach układu oraz zerowanie się sumy rzutów momentów wszystkich sił wzglę-dem trzech osi układu. Stąd sześć równań równowagi statycznej układu z sześcioma niewiadomymi składowymi sił reakcji podporowych G -H� = ?B� + - sin = 0
G -H = ?B + ?_ = 0
G -H = ?B + ?_ + ?C − >A − >� − - cos = 0
G +H� = ?C ∙ 6 − >A ∙ 2 − >� ∙ 6 − - ∙ cos ∙ 10 = 0
G +H� = −?_ ∙ 4 + >A ∙ 6√3 − ?C ∙ 6√3 + - ∙ sin ∙ 10 + - ∙ cos ∙ 6√3 = 0
G +H = ?_ ∙ 12√3 − - ∙ sin ∙ 10 = 0
gdzie:
` a12√3 , 10,0bX
Y
Z
c a12√3 , 0,0b
dA a 6√3 , 2,3b
d� a 6√3 , 6,8b
e a 6√3 , 6,0b
f a 6√3 , 10,10b
* �
gh �
gi �
j �kl j �km
j �kn
j �om j �on
j �pn
αααα

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
sin =6√3
qa 6√3b� + 10�= 6√336 ≅ 0.327; cos = 10
qa 6√3b� + 10�= 10√112 ≅ 0.945
Z powyższych równań otrzymuje się składowe sił reakcji podporowych: ?B� = −- sin ≅ −1635 [N] ?_ = - ∙ sin ∙ 10 ∙ √312 ≅ 2359.9 [N] ?B = −?_ = −2359.9 [N] ?C = >� + 13 >A + 53 - ∙ cos ≅ 22875 [N] ?_ = √32 >A − √32 ?C + 52 - ∙ sin + √32 - ∙ cos ≅ 1359.5 [N] ?B = >A + >�+- cos − ?_ − ?C ≅ 5490.5 [N] Literatura: [4] rozdz. 5. str. 101÷113; rozdz. 6. str. 114÷137.
Temat 6. Środek ciężkości ciał jednorodnych liniowych, płaskich i przestrzennych.
Zagadnienia:
– moment statyczny geometryczny lub masowy ciała względem płaszczyzny lub osi; – wyznaczanie współrzędnych środka ciężkości ciał liniowych, płaskich lub przestrzennych;
Przykład 6.1.
Wyznaczyć położenie środka ciężkości jednorodnej linii materialnej łamanej o długościach poszcze-gólnych odcinków li i współrzędnych środków ciężkości tych odcinków dH(=H, <H , rH).
O
X
Y
Z
�� �� � �
dH(=H, <H , rH)
dA(=A, <A, rA)
ds(=s, <s, rs)d(=t , <t , rt) XH ,uv = �H ∙ =H [m�]
X,uv = G(�H ∙ =H)sHIA
[m�]
Rozwiązanie: Moment statyczny geometryczny i-tego odcinka linii względem płaszczyzny OYZ (odcinek skupiamy myślowo w jego środku ciężkości Ci )
oraz moment statyczny rzeczywisty całej linii względem płaszczyzny OYZ
Na podstawie podstawowego twierdzenia o środku ciężkości, moment statyczny rze-czywisty jest równy momentowi statyczne-mu całej linii skupionej w jej środku ciężko-ści

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
X,uv = G(�H ∙ =H)sHIA
= wG �Hs
HIAx ∙ =t [m�]
stąd otrzymuje się współrzędną x
=t = ∑ (�H ∙ =H)sHIA∑ �HsHIA
i analogicznie pozostałe współrzędne
<t = ∑ (�H ∙ <H)sHIA∑ �HsHIA rt = ∑ (�H ∙ rH)sHIA∑ �HsHIA
W przypadku niejednorodnej odcinkami linii materialnej, tzn. niejednakowych gęstościach liniowych ρi poszczególnych odcinków, należy w powyższych wzorach uwzględnić gęstość ρi
=t = ∑ (�H ∙ zH ∙ =H)sHIA∑ (�HsHIA ∙ zH) <t = ∑ (�H ∙ zH ∙ <H)sHIA∑ (�HsHIA ∙ zH) rt = ∑ (�H ∙ zH ∙ rH)sHIA∑ (�HsHIA ∙ zH)
Przykład 6.2.
Należy wyznaczyć położenie środka ciężkości trójkąta o podanej geometrii względem układu OXYZ.
Można wykazać ponadto, że współrzędne środka ciężkości =t, <t , rt są średnią arytmetyczną współ-rzędnych wierzchołków trójkąta
=t = =B + =C + =_3 ; <t = <B + <C + <_3 ; rt = rB + rC + r_3
Przykład 6.3.
Należy wyznaczyć położenie środka ciężkości C�=t, <t� powierzchni przekroju ceownika o wymia-rach a = 4g, h = 6g, g pokazanych na schemacie.
ACFC = BCEC = DCHC = 21
Rozwiązanie: Dowodzi się na podstawie tw. Talesa, że środek ciężkości trójkąta C�=t, <t , rt� leży w punkcie przecię-cia się środkowych AF, DH i BE i że dzielą się one w stosunku 1:2, tzn.
Stąd wynika natychmiast, że środek ciężkości C leży w odległości jednej trzeciej wysokości trójkąta od jego podstawy.
O ��
�� � � X
Y
Z
A�=B, <B , rB�
B�=C, <C , rC�
D�=_, <_ , r_�E�=�, <� , r��
F�=�, <� , r��
C�=t, <t , rt�
H�=�, <� , r��

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Moment statyczny X całego pola powierzchni przekroju względem osi OY jest sumą momentów sta-tycznych pól powierzchni trzech prostokątów, które zgodnie z podstawowym twierdzeniem o środku ciężkości można skupić w ich środkach ciężkości, stąd X = )A ∙ =A + )� ∙ =� + )@ ∙ =@ = � ∙ � ∙ =A + (ℎ − 2 ∙ �) ∙ � ∙ =� + � ∙ � ∙ =@ =
= � ∙ � ∙ �2 + (ℎ − 2 ∙ �) ∙ � ∙ �2 + � ∙ � ∙ �2 = 18 �@ [m@] Zgodnie z podstawowym tw. o środku ciężkości można całe pole przekroju skupić w jego środku ciężkości i wówczas moment statyczny jest równy X = ()A + )� + )@) ∙ =t = [� ∙ � + (ℎ − 2 ∙ �) ∙ � + � ∙ �] ∙ =t = 12 �� ∙ =t
Z porównania powyższych momentów statycznych: rzeczywistego i zastępczego, otrzymuje się współrzędną xC
=t = 18 �@12 �� = 1.5 �
Oczywiście ze względu na symetrię przekroju współrzędna <t = ℎ 2� .
Przykład 6.4.
Należy wyznaczyć położenie środka ciężkości odcinka okręgu o promieniu R i kącie rozwarcia 2ψ, położonego symetrycznie względem osi OY w sposób pokazany na rysunku.
Elementarny moment statyczny tego łuku względem osi OX jest równy �X� = < ∙ �� = ? ∙ sin � ∙ �� = ?� ∙ sin � ∙ �� [m2]
Y
X
O
dl
y dφ
φ ψ R
C(0, <t)
Rozwiązanie: W przypadku ciał kołowych, kulistych, obłych nie istnieje możliwość podziału takich ciał na skończoną ilość ciał o znanych środkach cięż-kości, tak jak w poprzednim przykładzie prze-kroju ceownika. Należy więc dokonać podziału odcinka okręgu na nieskończoną liczbę nie-skończenie małych łuków okręgu o długości dl, przy czym �� = ? �� [m]
=A = �2 ; <A = �2 ; =� = �2 ; <� = ℎ2 =@ = �2 ; <@ = ℎ − �2
Rozwiązanie: Powierzchnię przekroju kątownika dzieli się na figury, tutaj prostokąty, dla których łatwo znaleźć środek cięż-kości. Współrzędne środków ciężkości poszczególnych prostokątów są następujące:
C�=t, <t �
d1=1, <1 X
Y
h
a
g
O
d3=3, <3
d2=2, <2

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Rzeczywisty moment statyczny całego odcinka okręgu jest sumą elementarnych momentów statycz-nych
X� = � �X� = � ?� ∙ sin � ∙ ��� I �� � �
� I �� � �= ?� ∙ [− cos �]�� � �
�� � � =
= ?� ∙ �− cos ��� + �� + cos ��� − ��� = 2 ∙ ?� ∙ sin � [m2]
Na podstawie podstawowego tw. o środku ciężkości rzeczywisty moment statyczny ciała jest równy momentowi statycznemu całego ciała skupionego w jego środku ciężkości X� = ? ∙ 2� ∙ <t [m2] stąd z porównania obu wyrażeń otrzymuje się współrzędną yC
<t = ? ��� ��
W szczególnym przypadku półokręgu otrzymuje się <t = �� ? ≅ 0.637 ?.
Zadanie 6.5.
Wykazać, że środek ciężkości jednorodnego stożka kołowego o wysokości H leży w odległości H /4 od jego podstawy. Literatura: [2] rozdz. 9. str. 195÷211; [4] rozdz. 7. str. 138÷151.
Temat 7. Momenty bezwładności i dewiacji ciał jednorodnych.
Zagadnienia:
– wyznaczanie momentów geometrycznych i masowych ciał liniowych i płaskich; – wyznaczanie promienia bezwładności ciała; – zastosowanie transformacji równoległej momentów bezwładności.
Przykład 7.1.
Wyznaczyć masowe momenty bezwładności jednorodnego pręta prostego o długości l i masie m względem osi prostopadłej do pręta i przechodzącej przez jego środek ciężkości C lub przez jego ko-niec.
Rozwiązanie:
Pręt zostaje podzielony na nieskończenie małe elementy o długości dx i o masie �� = �� �= [kg]
X
YC
C=O x dx
l/2 l/2
A B

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Elementarny moment bezwładności względem osi OYC przechodzącej przez środek ciężkości pręta jest równy ��� = =� ∙ �� = �� =��= [kgm�] natomiast całkowity moment bezwładności jest sumą momentów elementarnych
�� = � =� ∙ �� = � �� =��=�����
= �� � =��=�����
= � ∙ ��12 [kgm�]
Moment bezwładności względem osi YA przechodzącej przez koniec pręta można wyznaczyć na pod-stawie tw. Steinera
�B = �t + � ∙ a�2b� = � ∙ ��3 [kgm�]
Przykład 7.2.
Należy wyznaczyć momenty bezwładności geometryczne i masowe, oraz promienie bezwładności pola powierzchni jednorodnego koła o masie m i promieniu R. Na tej podstawie wyznaczyć również moment bezwładności jednorodnego walca kołowego o masie m i promieniu zewnętrznym R.
Rozwiązanie:
�, = � ��, = � 2�3@�3�� = � ?D
2 = � cD32 [mD]
Całkowity masowy moment bezwładności pola powierzchni koła względem bieguna O otrzyma się po pomnożeniu momentu geometrycznego przez gęstość powierzchniową z�
�5 = �,z� = � ?D2 ��?� = �?�
2 = �c�8 [kgm�]
Momenty bezwładności geometryczne lub masowe względem osi OX lub OY można wyznaczyć na podstawie twierdzenia: �� + � = �,
przy czym w rozważanym przypadku osie OX i OY są osiami symetrii koła, stąd �� = � a więc
�� = � = �,2 = � ?D4 = � cD
64 [mD] oraz
X
Y
O
R
r
dr �) = 2�3�3 [m�]
��, = 3��) = 2�3@�3 [m�]
Pole powierzchni koła dzieli się na współśrodkowe nieskończenie cienkie elementarne pierścienie o promieniu wewnętrznym r i grubości dr. Pole po-wierzchni elementarnego pierścienia
Elementarny geometryczny moment bezwładności pola powierzchni koła względem bieguna O
oraz całkowity geometryczny moment pola powierzchni koła

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
�l = �m = �?�4 = �c�
16 [kgm�] Promienie bezwładności koła względem bieguna O lub osi OX i OY
%, = q�,) = q�?D/2�?� = ?√2 [m] %� = % = q��) = q�?D/4�?� = ?2 [m]
przy czym zachodzi oczywiście zależność %�� + %� = %,�
Moment bezwładności jednorodnego walca o masie m i promieniu R względem jego osi OO’ jest rów-ny momentowi bezwładności jednorodnego koła o takiej samej masie m i promieniu R, tzn.
�55� = �?�2 = �c�
8 [kgm�]
Zadanie 7.3.
Należy wykazać, że moment bezwładności materialnego jednorodnego pierścienia o masie mp i śred-nicach: zewnętrznej Dz wewnętrznej Dw jest określony wzorem
Literatura: [2] rozdz. 7. str. 142÷170; [4] rozdz. 16. str. 269÷279.
Temat 8. Tarcie.
Zagadnienia:
– zastosowanie praw tarcia ślizgowego suchego i tarcia tocznego; – równowaga układów mechanicznych z uwzględnieniem sił tarcia.
�55� = ��(c� + c�� )8 [kgm�]
c = qc� + c��2 [m]
a średnica bezwładności D wzorem
Dz
Dw O
O’
O
R O’ O
R

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Przykład 8.1.
Płaski model kadłuba pontonu w kształcie prostokąta o długości l = 7 m i wysokości h = 1 m oraz o ciężarze G = 5000 N, spoczywa na pochylni wsparty na ślizgu o współczynniku tarcia ślizgowego suchego µ = 0.2 oraz na rolce o średnicy d = 0.2 m i współczynniku tarcia tocznego δ = 2 mm. Jakie musi być nachylenie α pochylni względem poziomu, aby ponton mógł sam z niej zjechać ?
Rozwiązanie:
Kładzie się układ współrzędnych OXY w taki sposób, że punkt O pokrywa się z punktem A, a oś OX jest równoległa do pochylni. Przykłada się do modelu pontonu wszystkie siły zewnętrzne (tutaj jest to tylko pionowa siła ciężkości >�) oraz wszystkie siły reakcji podpór: w punkcie A składową styczną czyli siłę tarcia �B oraz składową normalną ? �B, w punkcie B składową styczną �C i składową nor-
malną ? �C przesuniętą z punktu B teoretycznego styku rolki z podłożem o wartość δ współczynnika tarcia tocznego.
Warunki równowagi statycznej modelu pontonu określone są dwoma równaniami sum składowych sił na osiach OX i OY oraz równaniem sumy momentów sił względem punktu np. O
C
d/2
l/
l/
h/
k
D A
α
>�
B X
Y
O
? �B
? �C
�B
�Cδ
C
d/2
l/
l/
h/
k
D A
α
>�
B

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
G -H� = − B − C + > sin = 0
G -H = ?B + ?C − > cos = 0
G +HC = ?C ∙ ¡ + > ∙ cos ∙ a� − �2b − > ∙ sin ∙ aℎ2 + �2b − ?B ∙ � = 0
W powyższych trzech równaniach jest pięć niewiadomych: B, C, ?B, ?C i . Dodatkowe dwa
równania równowagi układu wynikają z praw tarcia ślizgowego suchego i tarcia tocznego. Zakłada się, że na ślizgu A tarcie jest maksymalnie rozwinięte, czyli osiąga maksymalną wartość B = ¢ ∙ ?B
natomiast w punkcie B wartość siły tarcia C jest taka, że umożliwia toczenie się rolki bez poślizgu
G +H_(£¤�¥¦) = ?C ∙ ¡ − C ∙ �2 = 0
czyli
C = 2¡� ?C
przy czym należałoby sprawdzić, czy ta wartość tarcia ślizgowego nie przekracza wartości maksymal-nej określonej współczynnikiem tarcia ślizgowego w punkcie B. Po uwzględnieniu powyższych dwóch dodatkowych równań otrzymuje się po przekształceniach wyra-żenie określające kąt α
tan = ¢ �� − �2 + ¡� + ¡� �� + ¡ + ℎ + �2 �¢ − 2¡� � ≅ ¢ �� − �2� + ¡� �
� + ℎ + �2 �¢ − 2¡� � ≅ 0.0723
czyli kąt α ni powinien być mniejszy niż 4.13⁰.
Zadanie 8.2.
Jednorodny walec o ciężarze G2 = 10 kN i promieniu R = 1 m połączony sztywnym nieważkim prętem CD z jednorodnym prostopadłościanem o ciężarze G1= 20 kN spoczywają na równi pochyłej nachylo-nej do poziomu pod kątem α = 30⁰. Współczynnik tarcia tocznego walca wynosi δ = 5 mm. Jaki musi być współczynnik tarcia ślizgowego µ między prostopadłościanem a równią, aby układ pozostawał w spoczynku.
Literatura: [4] rozdz. 2. str. 33÷42; rozdz. 3. str. 74÷95.
C D
h
R
l α

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Temat 9. Kinematyka punktu materialnego.
Zagadnienia:
– określanie równań ruchu i toru ruchu punktu materialnego; – wyznaczanie promienia krzywizny toru ruchu; – wyznaczanie wektorów prędkości i przyspieszenia punktu materialnego.
Przykład 9.1.
W mechanizmie korbowo-tłokowym ramie wykorbienia OA i korbowód AB mają jednakową długość, tzn. OA = r = AB = l = 0.4 m. Ramię wykorbienia porusza się z ustalonym przyspieszeniem kątowym ε = 5 rad/s2 oraz prędkością kątową w danej chwili ω = 10 rad/s. Należy:
a) określić równanie ruchu i toru ruchu punktu P, znajdującego się na korbowodzie w odległości PB = l / 2 od sworznia tłokowego;
b) wyznaczyć wektory prędkości i przyspieszenia oraz promień krzywizny toru ruchu punktu P, dla położenia korby φ = 0;
c) wyznaczyć wektory prędkości i przyspieszenia punktu końcowego korby A dla położenia kor-by φ = 45⁰.
Rozwiązanie:
Ad. a) Układ współrzędnych OXY położono tak, że os OX jest osią symetrii tłoka a punkt O pokrywa się z osią wału korbowego. Równanie ruchu ustalonego obrotowego korby OA �(©) = ª© = 10 ∙ © [rad] Równania parametryczne ruchu punktu P
=(©) = 3 cos � + �2 cos � = 32 � cos � = 32 � cos ª© [m] <(©) = �2 sin � = �2 sin ª©
Równanie toru ruchu otrzyma się, po wyeliminowaniu z równań parametrycznych ruchu czasu t: =�(©)�32 ��� + <�(©)
��2�� = (cos ª©)� + (sin ª©)� = 1
Jest to równanie elipsy o środku w punkcie O i o półosiach 3� 2⁄ i � 2⁄ .
X
Y
O
r
l/2
l/2
B
A
P(x,y)
x
y
φ

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Ad b) Różniczkując równania ruchu punktu P otrzymuje się równania składowych prędkości
=(©) = − 32 � ª sin ª© < (©) = �2 ª cos ª© [m s⁄ ] a po kolejnym zróżniczkowaniu równania składowych przyspieszenia punktu P
=®(©) = − 32 � ª� cos ª© <® (©) = − �2 ª� sin ª© [m s�⁄ ] W położeniu początkowym ruchu, gdy punkt P znajduje się na osi OX droga kątowa φ = 0 i wówczas składowe prędkości i przyspieszenia są następujące
=(© = 0) = 0 < (© = 0) = �2 ª = 2 [m s⁄ ] =®(© = 0) = − 32 � ª� = −60 <® (©) = 0 [m s�⁄ ]
a wektory prędkości i przyspieszenia �̄°(© = 0) = 2 ȷ� ��°(© = 0) = −60 ı� czyli wektor prędkości jest skierowany pionowo w górę wzdłuż osi OY, zaś wektor przyspieszenia – poziomo w lewo wzdłuż osi OX.
Wektor prędkości �̄°(� = 0) wyznacza oś styczną τφ = 0. Przyspieszenie ��°(� = 0) jest całkowitym przyspieszeniem punktu P w chwili początkowej i leży ono na kierunku osi normalnej nφ = 0 , czyli jest to jednocześnie składowa normalna ��s przyspieszenia, której wartość określona jest wyrażeniem
�s(� = 0) = [¯°(� = 0)]�z(� = 0)
stąd promień krzywizny toru ruchu punktu P w chwili początkowej
��
�� X
Y
O
r
A
P(x,y)
φ
� 2⁄
3l/2
l/2
l/2
B
�̄°(� = 0)
��°(� = 0) P�I�
τ�I�
n�I�
Sφ = 0
X
Y
O
r
A
P(x,y)
φ
� 2⁄
3l/2
l/2
l/2
B

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
z(� = 0) = [¯°(� = 0)]��s(� = 0) = 2�
60 = 115 [m] wyznaczający położenie środka krzywizny Sφ = 0 toru ruchu w chwili początkowej.
Ad. c) Punkt końcowy korby A porusza się ruchem jednostajnym z prędkością kątową korby ω = 10 rad/s po okręgu o promieniu OA = r = 0.4 m. Wektor prędkości styczny do tego okręgu a prostopadły do promienia OA ma wartość ¯B = ª ∙ 3 = 4 [m s⁄ ] Wektor przyspieszenia w ruchu jednostajnym po okręgu ma tylko składową normalną ��µ� skierowaną do środka okręgu O. Wartość aAn tej składowej przyspieszenia wynosi
�Bs = ¯B�3 = 4�0.4 = 40 [m s�⁄ ]
Zadanie 9.2.
Ciężarek zawieszony na sprężynie wykonuje prostoliniowe drgania harmoniczne wzdłuż osi OX. W chwili początkowej nieruchomy ciężarek wychylony był z położenia zerowego na odległość x0 = 0.05 m. Ilość drgań na minutę wynosi n = 150 1/min. Należy określić równanie harmonicznego ruchu cię-żarka oraz równania parametryczne prędkości i przyspieszenia ciężarka oraz narysować wykresy tych wielkości. Wyznaczyć również amplitudy przemieszczenia, prędkości i przyspieszenia ciężarka. Literatura: [2] rozdz. 11.6. str. 241÷243; [4] rozdz. 8. str. 153÷168.
Temat 10. Kinematyka ciała doskonale sztywnego w ruchu postępowym i obrotowym.
Zagadnienia:
– kinematyka tłoka typowego silnika spalinowego podczas ustalonego ruchu obrotowego wału korbowego;
– wyznaczanie równań ruchu obrotowego jednostajnego i jednostajnie zmiennego ciała dosko-nale sztywnego.
r
Y
O
A
φ = 45⁰ X
��B = ��µ�
�̄B
B

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Przykład 10.1.
Należy wyznaczyć równania parametryczne przemieszczenia, prędkości i przyspieszenia tłoka typo-wego silnika spalinowego podczas jednostajnego ruchu obrotowego walu korbowego.
Rozwiązanie:
W typowym silniku spalinowym stosunek λ długości r korby do długości l korbowodu wynosi ¶ = 3 �⁄ = 1 4⁄ ∶ 1 3⁄ . Równanie parametryczne ruchu jednostajnego obrotowego wału korbowego określa drogę kątową φ(t) w sposób następujący �(©) = ª© [rad] gdzie ω [ rad/s] jest prędkością kątową wału korbowego.
Przemieszczenie tłoka x = = 3 + � − 3 cos � − � cos przy czym kąt α można określić za pomocą kąta φ ℎ = 3 sin � = � sin stąd przy < 90°
sin = 3� sin � = ¶ sin � cos = ¹1 − ¶�sin��
Po rozwinięciu pierwiastka ¹1 − ¶�sin�� w szereg Maclaurina przy ¶�sin�� → 0
¹1 − ¶�sin�� ≅ 1 − 12 ¶�sin��
i uwzględnieniu zależności
sin�� = 12 (1 − cos 2�)
otrzymuje się ostateczną postać równania parametrycznego ruchu tłoka
=(©) = 3 + 3�4� − 3 acos ª© + ¶4 cos 2 ª©b [m]
a po zróżniczkowaniu – równania parametryczne prędkości i przyspieszenia tłoka
=(©) = 3ª (sin ª© + ¶2 sin 2ª©) [m s⁄ ] =®(©) = 3ª� (cos ª© + ¶ cos 2ª©) [m s�⁄ ]
Ruch tłoka oraz jego prędkość i przyspieszenie składają się z dwóch składowych: harmonicznej pod-stawowej zmieniającej się z prędkością wału korbowego ω oraz z drugiej harmonicznej zmiennej z dwukrotnie większą prędkością kątową 2ω, przy czym amplituda drugiej harmonicznej przemieszcze-
O X
Y
A
B O’
h l r
φ α
x

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
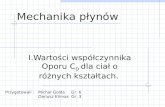
nia stanowi ¶/4 ≅ 0.125 ÷ 0.17 amplitudy pierwszej harmonicznej, natomiast amplituda drugiej har-monicznej przyspieszenia stanowi aż ¶ ≅ 0.25 ÷ 0.33 amplitudy pierwszej harmonicznej. Stąd wykres przemieszczenia, prędkości a szcze-gólnie przyspieszenia wyraźnie odbiega od wykresu funkcji harmonicznej. Na rysunkach poniżej po-kazano przykładowe wykresy wielkości kinematycznych ruchu tłoka dla parametrów: ω = 112.8 rad/s, r = 1.1 m, l = 4.3 m, λ ≅ 0.256.
0
0,5
1
1,5
2
2,5
0 0,01 0,02 0,03 0,04 0,05 0,06
t [s]
przemieszczenie tłoka xB(t) [m]
GMP GMPDMP
-150
-100
-50
0
50
100
150
0 0,01 0,02 0,03 0,04 0,05 0,06
t [s]
prędkość tłoka vB(t) [m/s]
GMPGMPDMP
-15000
-10000
-5000
0
5000
10000
15000
20000
0 0,01 0,02 0,03 0,04 0,05 0,06
t [s]
przyspieszenie tłoka aB(t) [m/s2]
GMPGMP DMP

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Można wykazać, że ekstremalna wartość przyspieszenia występuje w GMP (górnym martwym punk-cie) i wynosi �C»¦� = =®»¦� = 3ª�(1 + ¶) [m s�⁄ ]
natomiast ekstremalna wartość prędkości tłoka wynosi ¯C»¦� = =»¦� = 3ª ¹1 + ¶� [m s⁄ ]
i występuje dla kąta φ określonego wyrażeniem
cos � = −1 + √1 + 8¶�4¶
Zadanie 10.2.
Należy wyznaczyć równanie parametryczne φ = φ(t) ruchu obrotowego jednostajnego ciała doskonale sztywnego, gdy prędkość kątowa ciała ω = ω0 = const, oraz ruchu jednostajnie zmiennego, gdy przy-spieszenie kątowe ciała ε = ε0 = const. Narysować również wykresy drogi kątowej φ(t), prędkości ką-towej ω(t) i przyspieszenia kątowego ε(t) ciała. Literatura: [4] rozdz. 10. str. 184÷191.
Temat 11. Kinematyka ciała doskonale sztywnego w ruchu płaskim.
Zagadnienia:
– wyznaczanie prędkości kątowej i przyspieszenia kątowego ciała; – wyznaczanie wektorów prędkości i przyspieszenia punktów ciała; – wyznaczanie chwilowego środka obrotu i środka przyspieszeń.
Przykład 11.1.
Koło o promieniu R = 1 m toczy się po prostoliniowym torze w płaszczyźnie pionowej z prędkością środka koła ̄ ,¼= 10 m/s i przyspieszeniem środka koła �,¼= 5 m/s2. Należy wyznaczyć:
a) chwilowy środek obrotu Sv , prędkość kątową ω i przyspieszenie kątowe ε koła oraz przyspieszenie ��½¾ chwilowego środka obrotu Sv;
b) prędkość �̄B i przyspieszenie ��B punktu A koła leżącego na poziomej średnicy koła.
A O’
R ��,¼ �̄,¼

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Rozwiązanie:
Ad a) Zakładamy, że koło toczy się bez poślizgu, więc punkt styku koła z podłożem jest w danym momencie ruchu nieruchomy, tzn. jego prędkość jest równa zero. Jest to wiec chwilowy środek obrotu koła Sv.
Przyspieszenie ��½¾ chwilowego środka obrotu Sv można uważać, jako złożenie przyspieszenia ��,¼ bieguna O’ oraz przyspieszenia względnego ��½¾/,¼ punktu Sv względem bieguna O’ ��½¾ = ��,¼ + ��½¾/,¼ przy czym przyspieszenie względne jest suma przyspieszenia względnego stycznego ��½¾/,¼¿ i przyspie-szenia względnego normalnego ��½¾/,¼s , stąd ��½¾ = ��,¼ + ��½¾/,¼¿ + ��½¾/,¼s gdzie: �½¾/,¼¿ = À ∙ SÂO¼ = À ∙ ? [m s�⁄ ] �½¾/,¼s = ª� ∙ SÂO¼ = ª� ∙ ? [m s�⁄ ].
oraz �½¾/,¼¿ = �,¼ skąd otrzymuje się wartość przyspieszenia kątowego koła À = �,¼ ?⁄ = 5 1⁄ = 5 [rad s�� ] Całkowite przyspieszenie chwilowego środka obrotu Sv jest więc równe przyspieszeniu względnemu normalnemu ��½¾/,¼s punktu Sv względem O’ ��½¾ = ��½¾/,¼s przy czym wartość tego przyspieszenia wynosi �½¾ = �½¾/,¼s = ª� ∙ ? = 100 [m s�⁄ ]
A O’
R ��,¼ �̄,¼
S¾
��½¾/,¼¿
��½¾/,¼s
��,¼
��½¾/,¼¿ + ��,¼ = 0
Wektory przyspieszenia ��,¼ % ��½¾/,¼¿ leżą na tym samym kierunku stycznym do koła w punkcie Sv. Ponieważ koło porusza się bez poślizgu, więc punkt Sv styku koła z podłożem nie może wykonać w kierunku stycznym jakiegokolwiek ruchu, czyli przyspieszenie punktu Sv w tym kierunku musi być równe 0, stad równanie wektorowe
lub ��½¾/,¼¿ = −��,¼
A O’
R ��,¼ �̄,¼
S¾
¯,¼ = ª?
ª = ¯,¼? = 101 = 10 [rad s⁄ ]
Prędkość punktu O’ można teraz określić jako prędkość punktu w ruchu po okręgu o promieniu SvO’=R i o środku w punk-cie Sv
stąd chwilowa prędkość kątowa koła

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Ad. b) Prędkość punktu A koła można przedstawić jako sumę wektorową prędkości pewnego bieguna, np. O’ oraz prędkości względnej ̄�B/,¼ punktu A względem tegoż bieguna �̄B = �̄,¼ + �̄B/,¼ przy czym ¯B/,¼ = ª ∙ ? = 10 [m s⁄ ]
Przyspieszenie punktu A można przedstawić jako sumę geometryczną przyspieszenia pewnego biegu-na, np. O’, oraz przyspieszenia względnego ��B/,¼ punktu A względem tegoż bieguna ��B = ��,¼ + ��B/,¼ = ��,¼ + ��B/,¼¿ + ��B/,¼s
przy czym �B/,¼¿ = À ∙ AO¼ = À ∙ ? = 5 [m s�⁄ ] �B/,¼s = ª� ∙ AO¼ = ª� ∙ ? = 100 [m s�⁄ ]
Ad. c) Chwilowy środek przyspieszeń Sa leży na prostej odchylonej od kierunku przyspieszenia do-wolnego punktu ciała, np. punktu Sv, o kąt β określony wyrażeniem
tan Ä = Àª� = 510� = 0.05
czyli o kąt β = 2.86⁰, w kierunku wyznaczonym zwrotem przyspieszenia kątowego ε (tutaj w prawo). Odległość środka przyspieszeń Sa od punktu (tutaj Sv) wynosi
X¦X¾ = �½¾√ªD + À� = 100√10D + 5� = 100100.12 ≅ 0.999 [m]
�B = ���B/,¼s + �,¼�� + ��B/,¼¿ �� =
= ¹105� + 5� = 105.12 [m s�⁄ ]
Wartość przyspieszenia punktu A wynosi
O’ A ��,¼ ��B/,¼s
��B/,¼¿ ��B
A
S¾
�̄,¼ O’ �̄,¼
�̄B/,¼ �̄B
¯B = �¯,¼� + ¯B/,¼� = ¹10� + 10� == 10√2 [m s⁄ ]
Prędkość �̄B jest prostopadła do kierunku ASv a wartość tej prędkości wynosi

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Przykład 11.2.
W przekładni planetarnej koło satelitarne o promieniu R1 = 0.2 m obiega nieruchome koło centralne o promieniu R2 = 0.4 m napędzane jarzmem O1O2, które porusza się w danej chwili z prędkością kątową ω0 = 5 rad/s i przyspieszeniem kątowym ε0 = 20 rad/s2. Należy wyznaczyć dla położenia koła sateli-tarnego pokazanego na rysunku:
a) chwilowy środek obrotu Sv , prędkość kątową ω1 i przyspieszenie kątowe ε1 koła satelitarnego oraz przyspieszenie ��½¾ chwilowego środka obrotu Sv tego koła;
b) prędkość �̄B i przyspieszenie ��B punktu A pokazanego na rysunku; c) chwilowy środek przyspieszeń Sa koła satelitarnego.
Literatura: [2] rozdz. 13 str. 300÷337; [4] rozdz. 11. str. 192÷214.
Temat 13. Analiza kinematyczna mechanizmów.
Zagadnienia:
– wyznaczanie położeń i torów ruchu punktów elementów mechanizmów; – wyznaczanie prędkości i przyspieszeń członów i ich punktów; – wyznaczanie środków prędkości i przyspieszeń oraz centroid członów mechanizmów pła-
skich.
Przykład 13.1.
Konstrukcja nośna robota składa się z pionowego utwierdzonego słupa AB i dwóch ramion AC i BD o zmiennej długości, uwarunkowanej pracą siłowników hydraulicznych zainstalowanych w tych ramio-
O1
O2
R1
R2
ω0, ε0 A
S¾
O’
��½¾
Sa
β

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
nach, w sposób pokazany na rysunku. Należy określić zależność między prędkościami ruchu siłowni-ków, warunkujących pionowy ruch końca D ramienia BD.
Koniec D ramienia BD ma przemieszczać się wzdłuż prostej pionowej, czyli xD = const i stąd �=_�© = ��© [(� + CD) sin 2�] = �(CD)�© sin 2� + 2 � (� + CD) cos 2� = 0
Prędkość �̄�wysuwu siłownika CD ma wartość równą szybkości zmiany długości CD
¯� = �(CD)�© = −2� =_ cos 2�(sin 2�)� [m s⁄ ] natomiast prędkość �̄A wysuwu siłownika AC ma wartość równą szybkości zmiany długości AC
¯A = �(AC)�© = ��© (2� cos �) = − 2�� sin � [m s⁄ ] czyli
� = −¯A2� sin � [rad s⁄ ] Ostatecznie, w celu zapewnienia pionowego ruchu końca D ramienia CD, między prędkościami wy-suwu siłowników musi zachodzić zależność
¯� = =_� cos 2�sin � (sin 2�)� ¯A
przy czym, jeżeli - � → 0 to ̄ � → ∞ - � → 45⁰ to ̄ � → 0.
Zadanie 13.2.
W mechanizmie korbowo-tłokowym należy wyznaczyć, dla pionowego położenia korby OA o długo-ści r = 0.2 m, chwilowy środek obrotu Sv oraz prędkość kątową ω i przyspieszenie kątowe ε korbowo-du AB o długości l = 0.6 m, jeżeli korba obraca się ze stałą prędkością kątową ω0 = 20 rad/s. Literatura: [2] rozdz. 13 str. 300÷337; [4] rozdz. 11 str. 192÷214; [4] rozdz. 12 str. 215÷219.
A
O
B
C
D
φ
l
l φ
φ
180⁰-2φ
xC xD
X
�̄A �̄�
=t = AC ∙ sin � = 2� sin � cos � = = � sin 2� =_ = =t + CD ∙ sin(180° − 2�) = = (� + CD) sin 2�
CD = =_sin 2� − �
Rozwiązanie: Odcinki ramion AB i BC są jednakowej dłu-gości, stąd trójkąt ABC jest trójkątem równo-ramiennym i oba kąty u podstawy trójkąta są równe φ. Współrzędne x punktów C i D są określone wyrażeniami
stąd

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
Temat 14. Dynamika punktu materialnego.
Zagadnienia:
– określanie równania dynamicznego ruchu punktu materialnego; – wyznaczanie poprzez całkowanie równań parametrycznych i parametrów ruchu punktu mate-
rialnego; – wyznaczanie sił reakcji więzów.
Przykład 14.1.
Ciało doskonale sztywne o masie m = 2 kg, traktowane jako punkt materialny, porusza się do góry wzdłuż równi pochyłej, nachylonej pod kątem α = 30⁰. W chwili początkowej ciało ma prędkość v0 = 10 m/s. Współczynnik tarcia ślizgowego suchego między równią a ciałem wynosi µ = 0.2. Należy określić równanie dynamiczne ruchu ciała i wyznaczyć równanie parametryczne ruchu. Określić rów-nież drogę, jaką przebędzie ciało do chwili, gdy prędkość ciała zmniejszy się dwukrotnie oraz po ja-kim czasie to nastąpi?
Rozwiązanie.
Przykładamy do ciała wszystkie siły zewnętrzne oraz siły reakcji więzów. Są nimi siła ciężkości >�, jako siła zewnętrzna, oraz siły reakcji równi: normalnej ? �s i stycznej siły tarcia �.
Na podstawie II prawa Newtona układamy równania dynamiczne ruchu ciała wzdłuż osi OX i OY �=® = −>∥ − �<® = 0 = −>È + ?s przy czym >∥ = �� sin >È = �� cos Ponadto zakładamy, że tarcie ślizgowe suche jest maksymalnie rozwinięte, czyli = ¢?s stąd równania dynamiczne
?s − �� cos = 0
�=® = −�� sin − ¢?s = −�� sin − ¢�� cos = −��(sin + ¢ cos )
Otrzymano w ten sposób równanie różniczkowe ruchu ciała wzdłuż równi
�=® = −��(sin + ¢ cos )
α
s
�̄�
>�È
>�∥
>�
? �s �
X Y
O

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
które całkuje się dwukrotnie obustronnie
� �=®�© = �[−��(sin + ¢ cos )]�©
�=(©) = −��(sin + ¢ cos ) © + d¾
� �=�© = �[−��(sin + ¢ cos ) ©]�© + � d¾ �©
�=(©) = −��(sin + ¢ cos )2 ©� + d¾© + d�
Stałe całkowania wyznacza się z warunków początkowych ruchu
=(© = 0) = ¯� = d¾� stąd d¾ = �¯�
=(© = 0) = 0 = d� Ostateczna postać równań parametrycznych prędkości i przemieszczenia jest następująca =(©) = −�(sin + ¢ cos ) © + ¯�
=(©) = −�(sin + ¢ cos )2 ©� + ¯�©
Czas tk po jakim prędkość ciała zmniejszy się do połowy wartości początkowej wynika z równania =(© = ©¥) = −�(sin + ¢ cos ) ©¥ + ¯� = ¯�2
stąd
©¥ = ¯�2�(sin + ¢ cos ) = 102 ∙ 9.81 ∙ (sin 30° + 0.2 ∙ cos 30°) = 0.757 [s] natomiast droga przebyta w tym czasie przez ciało wyniesie
Ê = =(© = ©¥) = −�(sin + ¢ cos )2 ©¥� + ¯�©¥ = 38 ¯���(sin + ¢ cos ) =
= 38 ∙ 10�9.81 ∙ (sin 30° + 0.2 ∙ cos 30°) = 5.678 [m]
Zadanie 14.2.
Działo pokładowe wyrzuca pocisk o masie m = 10 kg z prędkością początkową v0 = 900 m/s. Zakłada-jąc brak oporu powietrza i zerową wysokość pocisku względem Ziemi w chwili początkowej ruchu, należy:
a) wyznaczyć równania różniczkowe i parametryczne ruchu pocisku wystrzelonego z działa pod kątem α = 30⁰ względem poziomu;
b) wyznaczyć tor ruchu pocisku o maksymalnym zasięgu poziomym xmax i pionowym ymax, oraz kąt względem poziomu wystrzału pocisku w obu przypadkach.
Literatura: [4] rozdz. 15 str. 241÷268.
Spis literatury
1. Kasyk L., Krupiński R.: Poradnik matematyczny. Akademia Morska, Szczecin 2006. 2. Leyko J.: Mechanika ogólna. T.1: Statyka i kinematyka. Wydawnictwo Naukowe
PWN, Warszawa 2005. 3. Leyko J.: Mechanika ogólna. T.2: Dynamika. Wydawnictwo Naukowe PWN, Warszawa 2006.

Projekt „Rozwój i promocja kierunków technicznych w Akademii Morskiej w Szczecinie”
Akademia Morska w Szczecinie, ul. Wały Chrobrego 1-2, 70-500 Szczecin
4. Niezgodziński M. E., Niezgodziński T. Zbiór zadań z mechaniki ogólnej. Wydawnic-two Naukowe PWN, Warszawa 2008.