01 Strona tytułowa ZN 1 - amw1.iq.pl · ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1...
122
AKADEMIA MARYNARKI WOJENNEJ im. Bohaterów Westerplatte ISSN 0860-889X KWARTALNIK ROK LIV Nr 1 (192) GDYNIA 2013
Transcript of 01 Strona tytułowa ZN 1 - amw1.iq.pl · ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1...

A K A D E M I A M A R Y N A R K I W O J E N N E J i m . B o h a t e r ó w W e s t e r p l a t t e
ISSN 0860-889X
KWARTALNIK
ROK LIV Nr 1 (192) GDYNIA 2013

R A D A N A U K O W A
prof. Leif Bjørnø (Dania); dr hab. inż. Krzysztof Czaplewski, prof. AMW; prof. dr hab. inż. Stanisław Dobrociński; prof. dr hab. inż. Antoni Drapella; prof. dr kpt. ż.w. Daniel Duda;
kontradm. dr inż. Czesław Dyrcz; prof. dr hab. inż. Andrzej Felski; prof. dr hab. inż. Krzysztof Ficoń; dr hab. inż. Jerzy Garus, prof. AMW; prof. dr hab. inż. Franciszek Grabski; dr hab. inż. Grażyna Grelowska, prof. AMW;
dr hab. inż. Andrzej Grządziela, prof. AMW; dr hab. inż. Wojciech Jędruch, prof. AMW; prof. dr hab. inż. Zygmunt Kitowski; dr hab. inż. Ryszard Kłos, prof. AMW;
prof. dr hab. inż. Eugeniusz Kozaczka; prof. dr Gvidonas Labeckas (Litwa); dr hab. inż. Artur Makar, prof. AMW; prof. dr hab. inż. Witold Malina; prof. dr hab. inż. Leszek Piaseczny; prof. dr hab. inż. Cezary Specht;
prof. dr hab. inż. Zbigniew Wiśniewski; dr hab. inż. Bogdan Żak, prof. AMW
K O M I T E T R E D A K C Y J N Y
Redaktor naczelny kontradm. dr inż. Czesław Dyrcz
Redaktorzy tematyczni: prof. dr hab. inż. Stanisław Dobrociński (mechanika techniczna)
prof. dr hab. inż. Antoni Drapella (informatyka) prof. dr hab. inż. Andrzej Felski (nawigacja)
dr hab. inż. Jerzy Garus, prof. AMW (automatyka i robotyka, mechatronika) prof. dr hab. Franciszek Grabski (matematyka)
dr hab. inż. Grażyna Grelowska, prof. AMW (hydroakustyka) dr hab. inż. Andrzej Grządziela, prof. AMW (budowa i eksploatacja maszyn)
dr hab. inż. Artur Makar, prof. AMW (hydrografia) Redaktor statystyczny
dr inż. Agata Załęska-Fornal Redaktor językowy/sekretarz
mgr Beata Różańska Członek KR z głosem doradczym
dr Lesław Mroziński
Wszys tk ie a r tyku ły zosta ły z recenzowane
Pierwotną (referencyjną) wersją czasopisma jest wersja on-line
Zeszyty Naukowe AMW są indeksowane w BazTech: http://baztech.icm.edu.pl oraz Index Copernicus: http://indexcopernicus.com
Artykuły Zeszytów Naukowych AMW są dostępne w wersji elektronicznej na stronie:
http://www.amw.gdynia.pl (zakładka: Nauka Zeszyty Naukowe AMW)
Redakcja Zeszytów Naukowych Akademii Marynarki Wojennej 81-103 Gdynia, ul. J. Śmidowicza 69
tel. 058 626 29 72 e-mail: [email protected]
Druk i oprawa Wydawnictwo Akademickie AMW

3
S P I S T R EŚC I
Sławomir J. Ambroziak, Ryszard J. Katulski, Jarosław Sadowski, Jacek Stefański
AEGIS — demonstrator technologii C-IED ................................................................ 7
Wojciech Anigacz
The technical aspects of protection of inland navigation (Techniczne aspekty zabezpieczenia żeglugi śródlądowej) ...................................... 19
Edward Chlebus, Tomasz Boratyński, Damian Opozda, Paweł Roczniak, Jan Bokszczanin, Tomasz Kruk, Tomasz Stencel, Maciej Sajkowski
Projekt, badania i wykonanie demonstratora zintegrowanego systemu kierowania akcją wytworzonego technologiami Rapid Manufacturing ................................................ 27
Stanisław Dobrociński, Leszek Flis, Jerzy Małachowski
Stabilność rozwiązań sprężysto-plastycznych zagadnień dynamiki ......................... 39
Wojciech Homik
Metryka wiskotycznego tłumika drgań skrętnych ..................................................... 55
Józef Lisowski
Metody komputerowego wspomagania decyzji manewrowej nawigatora w sytuacjach kolizyjnych .......................................................................................... 67
Tomasz Lus
Wstępne badania diagnostyczne szybkoobrotowych silników o zapłonie samoczynnym na okręcie podwodnym z wykorzystaniem metody obwiedni drgań ............................................................... 79
Jerzy Merkisz, Jarosław Markowski, Jacek Pielecha, Tadeusz Mikutel, Robert Kozłowski
Badania stężeń związków szkodliwych spalin turbinowego silnika śmigłowego w ustalonych warunkach eksploatacyjnych ......... 89

Spis treści
4
Ryszard Studański, Józef Zawadzki, Radosław Wąs
Stanowisko laboratoryjne do szerokopasmowej analizy sygnałów radiokomunikacyjnych .............................................................................. 97
Hubert Wysocki
Model ruchu operatorów dla różnicy wstecznej przy podstawach a, b ................... 109

5
C O N T E N T S
Sławomir J. Ambroziak, Ryszard J. Katulski, Jarosław Sadowski, Jacek Stefański
AEGIS — THE C-IED technology demonstrator ....................................................... 7
Wojciech Anigacz
The technical aspects of protection of inland navigation .......................................... 19
Edward Chlebus, Tomasz Boratyński, Damian Opozda, Paweł Roczniak, Jan Bokszczanin, Tomasz Kruk, Tomasz Stencel, Maciej Sajkowski
Design, testing and implementation an integrated rescue command system manufactured using innovative Rapid Manufacturing technologies ......................... 27
Stanisław Dobrociński, Leszek Flis, Jerzy Małachowski
Stability of solutions elastic-plastic dynamic issues ................................................. 39
Wojciech Homik
Certificate description viscous damper torsional vibrations...................................... 55
Józef Lisowski
Computer support methods of navigator manoeuvring decision in collisions situations ............................................................................................... 67
Tomasz Lus
Preliminary diagnostic tests on submarine high-speed marine diesel engine using envelope vibration method ......................................................... 79
Jerzy Merkisz, Jarosław Markowski, Jacek Pielecha, Tadeusz Mikutel, Robert Kozłowski
Emission tests of the turboprop engine of steady operating conditions .................... 89

Contents
6
Ryszard Studański, Józef Zawadzki, Radosław Wąs
Laboratory stand for analysis radiocommunication signals ...................................... 97
Hubert Wysocki
The backward a, b-difference operational calculus model ...................................... 109

ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1 (192) 2013
7
S ławomir J. Ambroziak, Ryszard J. Katulski, Jaros ław Sadowski, Jacek Stefański Poli technika Gdańska Wydział Elektroniki, Telekomunikacji i Informatyki Katedra Systemów i Sieci Radiokomunikacyjnych 80-233 Gdańsk Wrzeszcz, ul. Gabriela Narutowicza 11/12 e-mail: [email protected], [email protected], [email protected], [email protected]
A E G I S — D E M O N S T R A T O R T E C H N O L O G I I C - I E D
STRESZCZENIE
W artykule przedstawiono budowę i działanie opracowanego na Politechnice Gdańskiej demonstratora technologicznego systemu AEGIS, przeznaczonego do przeciwdziałania atakom z wykorzystaniem prowizorycznych urządzeń wybuchowych detonowanych drogą radiową (RCIED — Radio Controlled Improvised Explosive Devices). Przedstawiono zaimplementowaną oryginalną metodę generowania sygnału zagłuszającego o dowolnie ukształtowanym widmie częstotliwościo-wym, będącą przedmiotem zgłoszenia patentowego o numerze P.398050.
Słowa kluczowe: prowizoryczne ładunki wybuchowe, IED, C-IED, RCIED, demonstrator technologiczny.
WSTĘP
W XXI wieku konflikty asymetryczne zyskały znaczącą przewagę nad ich klasycznymi odpowiednikami, a siły zbrojne wielu państw konfrontowane są z prze-ciwnikiem, którego cele, organizacja i środki nie mieszczą się w konwencjonalnym pojęciu wojny. Kluczowymi elementami takiego konfliktu są działania skryte, zmienne i nastawione na zaskoczenie, których celem jest maksymalizacja efektów przy minimalizacji kosztów [3]. W takim stanie rzeczy szczególnego znaczenia nabie-ra konieczność metodycznego podejścia do kwestii przeciwdziałania prowizorycznym

8
urządzennajczęsts
Nrycznychklasyfikarzania kumetodę gkorzystyIED), de
Wfiniowani AAP-1sformułodzenie wludzi i (li inne ele
Fot. 1. U
Źródło: Rurządzeni2011, nr
Sławomir J
niom wybucsze i najgroźnNa wstępie h urządzeń wację. Następurtyny elektrgenerowania
ywane przez etonowane dr
PROWIZ
W związku znia IED w 19) posłużymowanej w [5]wybuchowe slub) środkówementy (prze
Urządzenia IE
R. Ambroziakiami wybucho4, s. 28–37.
J. Ambroziak,
chowym — niejsze narzęniniejszego
wybuchowycpnie przedstaomagnetyczna sygnału zastronę konflirogą radiową
CHZORYCZNY
z rozbieżnośnormie obromy się prop]: „Prowizorysporządzone w (przedmioedmioty) poc
ED wykonane poci
k, S. J. Ambrowymi w świ
, Ryszard J. K
IED (Improvędzie walki sł
artykułu prch, zawierająawiono budonej do ochrongłuszającegoiktu stosującą.
HARAKTERYCH URZĄ
ścią polskojęonnej NO-0pozycją uniwyczne urządzw sposób ptów) materiachodzenia wo
na bazie uzbriski moździerz
oziak, R. J. Kietle doktryny
Katulski, Jaros
vised Explołabszej stronyrzedstawionoącą definicję owę demonsny przed urząo pracę systecą urządzenia
RYSTYKA ĄDZEŃ WY
ęzycznej term02-A043 i słwersalnej dezenie wybuc
prowizorycznalnych. Zawojskowego i
rojenia wojskozowe, miny)
Katulski, Mety AJP-3.15, „
ław Sadowski
Zeszyty
sive Devicey konfliktu ao charakteryę tego rodzajustratora techądzeniami IEemów, którea RCIED (Ra
YBUCHOWY
minologii użyłownikach N
efinicji tegochowe (IED) ny, przeznacz
wiera przedmi(lub) niewoj
owego (pocisk
tody walki z p„Zeszyty Nau
i, Jacek Stefań
Naukowe AM
), stanowiącsymetrycznestykę prowiu broni oraznologii wytw
ED oraz opisamogą być w
adio Control
YCH
ywanej do zNATO (AAP
rodzaju bro— jest to ur
zone do rażeiot wybuchojskowego”.
ki artyleryjski
prowizorycznyukowe WSOW
ński
MW
cym ego. izo-z jej wa-ano wy-lled
zde-P-6 oni, rzą-enia owy
ie,
nymi WL”,

AEGIS —
1 (192) 2
Jjego opePonadto wojskowmanewro
Źródło: R
Łz nim stglobalnąw konflimieć niecyjnym, może byRafica Aryjskich
Zrycznychnie, kierumieszczmiędzy sa mianowładunek
Ukacji. Pr
— demonstrato
013
Jest to zatemeratorom naIED jest bro
wego (fot. 1owe wojsk n
Fot. 2. Urząd
R. Ambroziak,
Ładunki te, traty przeciwą opinię pubikt. W tym seproporcjona
a nawet stryć zamach boAl-Hariri. Te
z terytoriumZe względu h urządzeń wrowane drogązane w pojeźsobą, jednakwicie: przełąwybuchowyUrządzenia Irzykładowe s
or technologii
m urządzenie a uniknięcie onią efektyw.), jak równ
na poziomie t
dzenia IED wy
S. J. Ambrozi
z uwagi na wnika, umożl
liczną i pośrstanie rzeczyalne oddziałyrategicznym.ombowy w Len pojedyncz
m Libanu. na sposób d
wybuchowychą radiową, kździe z kiero
kże we wszysącznik powody, źródło zasiIED zazwycsposoby ukry
i C-IED
stosunkowokontaktu zb
wną, zbudownież cywilnetaktycznym.
ykonane na ba
iak, R. J. Katu
zwykle speliwiają stosujrednio na de
y IED w połąywanie na pr PrzykłademLibanie w 20zy akt terroru
detonacji wyrh: naciskowegkierowane przowcą samobóstkich możnadujący inicjacilania i pojemczaj są maskywania puła
o tanie i prostbrojnego z s
waną z elemeego (fot. 2.),
azie materiałó
ulski, wyd. cyt
ektakularny ującej je stronecyzje rządóączeniu z karowadzone om wpływu IE005 roku na ru doprowadz
yróżnia się nago działania, zewodowo, uójcą [6]. Urza wyróżnić ccję działania mnik. kowane w ceapek wykorzy
te w produkcsilniejszym ntów zarówn, ograniczają
w ogólnodost
t.
charakter atanie konfliktu
ów krajów zaampanią infooperacje na pED na stratebyłego premził do wycof
astępujące roinicjowane p
umieszczoneządzenia te mcharakterystyzapalnika, za
elu utrudnienystujących t
cji, pozwalajprzeciwnikieno pochodzeącą możliwo
tępnych
aku i związau wpływanieaangażowanyrmacyjną mo
poziomie opeegiczne decymiera tego krfania wojsk
odzaje prowiprzez podniese na samobójmogą różnić yczne elemenapalnik, głów
nia ich identyen rodzaj br
9
ące em. enia ości
ane e na ych oże era-yzje raju sy-
izo-sie-jcy, się
nty, wny
yfi-roni

10
przedstapłaszcze
Źródło: R
Zgicznychskach luskanalizonie ruchskrzyżow
Zkwencje trynie Ajego skucedury zczęści [4
Jnić różnsiły sojudiową (Rtego typjakie przzwykle anie elekt
Sławomir J
awiono na foe, folia, butel
R. Ambroziak,
Z powodu zwh stosująca Iudzkich, takowanie ruch
hu (wąskie uwania ulic, zjZagrożenia z ataków prze
AJP-3.15. W utków w razizwalczania s4]. Jak już to zo
ne rodzaje pusznicze najRCIED — R
pu ataki stanzeprowadzonaktualną jesttromagnetyc
J. Ambroziak,
otografii 3. Mki, opony, a
Fot. 3. Przy
S. J. Ambrozi
większenia mIED strona kkich jak targhu (mosty, prulice, spowajazdy z tras gzwiązane z peprowadzanycelu minimaie powodzensystemu IED
ostało napisaprowizoryczn
częściej stoRadio Contrnowiły od 50no z zastosot potrzeba n
czne.
, Ryszard J. K
Mogą do tegnawet spotk
kłady maskow
iak, R. J. Katu
możliwości okonfliktu stargi, często urzepusty, wiaalniacze ruchgłównych i ty
prowizorycznych przy ich alizacji ryzyknia, w dokumD zarówno ja
ane, ze wzglnych urządzesowane są u
rolled IED). 0 do 60% wowaniem IE
neutralizacji
Katulski, Jaros
go celu być kać można IE
wania urządze
ulski, wyd. cyt
osiągnięcia cra się rozmie
uczęszczane adukty), punhu) oraz puntym podobnenymi ładunkazastosowani
ka skutecznemencie zawaako całości,
ędu na sposóeń wybuchourządzenia I Dowodem
wszystkich aED [6]. W z
urządzeń RC
ław Sadowski
Zeszyty
wykorzystywED zalane bet
eń IED
t.
celów operaceszczać je wtrasy, punk
nkty powodujnkty charakte. ami wybuchiu określoneego ataku oraarte zostały p
jak i poszc
ób detonacjiowych. PodcIED detonowna to jest fa
ataków na sizwiązku z poCIED poprz
i, Jacek Stefań
Naukowe AM
wane kamientonem.
cyjnych i straw dużych skukty powodujjące spowolnerystyczne,
owymi i konzostały w d
az ograniczepriorytety i pzególnych je
i można wyrczas ataków wane drogą akt, iż w Iraiły sojusznicowyższym nez oddziaływ
ński
MW
nie,
ate-upi-ące nie-np.
nse-dok-enia pro-ego
róż- na ra-
aku cze, nie-wa-

AEGIS — demonstrator technologii C-IED
1 (192) 2013 11
Taki stan rzeczy był powodem podjęcia na Politechnice Gdańskiej w Kate-drze Systemów i Sieci Radiokomunikacyjnych prac nad systemem AEGIS, którego zadaniem jest ochrona obiektów mobilnych przed zagrożeniami związanymi z pro-wizorycznymi urządzeniami wybuchowymi detonowanymi drogą radiową.
NADAJNIK ZAGŁUSZAJĄCY SYSTEMU AEGIS
Nadajnik systemu AEGIS podzielony jest na dwa niezależne tory zagłusza-jące (rys. 1.) sterowane za pomocą komputera z panelem dotykowym. Pierwszy tor, obejmujący częstotliwości z zakresu od 20 MHz do 1 GHz, zbudowany jest z gene-ratora AFQ100A sygnałów w paśmie podstawowym oraz z generatora SMU200A, przenoszącego widmo sygnału w pasmo wysokich częstotliwości. Tak przygotowa-ny sygnał jest wzmacniany we wzmacniaczu 50W1000, a następnie podawany na zespół przełączanych filtrów pasmowo-zaporowych. W zależności od częstotliwości, które powinny być chronione (tzw. pasma chronione nie powinny być zagłuszane), np. częstotliwości działania wojskowych urządzeń radiokomunikacyjnych, można pod-łączać dowolne filtry, których przełączanie jest realizowane za pomocą przekaźni-ków transferowych (P1, P2, P3) wysokiej mocy. Następnie sygnał jest rozdzielany w diplekserze 5I210-20XQ1300 na dwa podpasma: od 20MHz do 500MHz oraz od 500MHz do 1GHz, które podawane są na dwie niezależne anteny nadawcze, odpo-wiednio AO1-0.03-0.50V/2013 oraz XPO3V-500-1300/034.
Z kolei drugi tor zagłuszający, obejmujący częstotliwości z zakresu od 0,8 GHz do 3 GHz, zbudowany jest z generatora AFQ100B sygnałów w paśmie podstawo-wym. Funkcje generatora częstotliwości nośnej i modulatora realizowane są przez generator SMBV100A. Zagłuszający sygnał w.cz. po wzmocnieniu we wzmacnia-czu 80S1G4 podawany jest na zespół filtrów pasmowo-zaporowych, przełączanych w identyczny sposób jak ma to miejsce w pierwszym torze zagłuszającym. Po pro-cesie filtracji sygnał podawany jest na antenę nadawczą OA2-0.3-10.0V/1505.
Należy podkreślić, że wykorzystywane generatory AFQ100A oraz AFQ100B pozwalają na generowanie w danej chwili zagłuszających sygnałów w.cz. w pa-smach o szerokościach odpowiednio 240MHz i 528MHz. W zależności od potrzeb zastosowanie tych generatorów w poszczególnych torach zagłuszających może być dowolne.

Sławomir J. Ambroziak, Ryszard J. Katulski, Jarosław Sadowski, Jacek Stefański
12 Zeszyty Naukowe AMW
Rys. 1. Schemat blokowy urządzenia zagłuszającego systemu AEGIS
Źródło: opracowanie własne.
Komputer sterujący IPPC-6192A-R1AE ma za zadanie realizację algorytmu generowania cyfrowej postaci sygnału zagłuszającego na podstawie wprowadzo-nych przez użytkownika parametrów. Następnie generowany jest sygnał zagłuszają-cy w paśmie podstawowym i dalej w paśmie wysokich częstotliwości. Ponadto komputer sterujący odpowiedzialny jest za sterowanie pracą generatorów AFQ100A, AFQ100B, SMBV100A i SMU200A (za pośrednictwem interfejsów Ethernet) oraz pracą przełączników filtrów (za pośrednictwem interfejsów RS232). Wytypowany komputer ma dotykowy wyświetlacz, co znacząco upraszcza obsługę urządzenia. Dodatkowo całość urządzenia zamontowana jest w dwóch szafach 19” posadowionych na specjalnym wózku, co ułatwia przemieszczanie urządzenia pod-czas testów. Wygląd demonstratora technologicznego nadajnika AEGIS przedsta-wiony został na fotografii 4. Parametry techniczne i eksploatacyjne zrealizowanego w powyższy sposób demonstratora zestawione zostały w tabeli 1.

AEGIS — demonstrator technologii C-IED
1 (192) 2013 13
Fot. 4. Wygląd demonstratora technologicznego nadajnika AEGIS
Źródło: opracowanie własne.

Sławomir J. Ambroziak, Ryszard J. Katulski, Jarosław Sadowski, Jacek Stefański
14 Zeszyty Naukowe AMW
Tabela 1. Parametry nadajnika zagłuszającego systemu AEGIS
Zagłuszane pasmo częstotliwości (20–3000) MHz
EIRP dla (20–1000) MHz ≤ 80 W
dla (0,8–3) GHz ≤ 128 W
Szerokość pasma zagłuszanego jednocześnie
dla (20–1000) MHz ≤ 240 MHz
dla (0,8–3) GHz ≤ 528 MHz
Metoda zagłuszania Bariera szerokopasmowa
Pobór mocy z sieci elektroenergetycznej < 1,6 kW (ok. 2,2 kW przy uruchamianiu)
Sterowanie – przewodowe — LAN – panel dotykowy
Rodzaj elementów promieniujących – 3 anteny dookólne – kable promieniujące
Zastosowanie
– ochrona obiektów mobilnych przed RCIED na terenie otwartym – zagłuszanie sieci komórkowych w pomieszczeniach – zagłuszanie dowolnych sieci radiokomunikacyjnych – możliwość dostosowania parametrów do wymagań obiorcy
Źródło: opracowanie własne.
INTERFEJS UŻYTKOWNIKA
Na rysunkach 2. i 3. przedstawiony został interfejs użytkownika, który wi-doczny jest na panelu dotykowym nadajnika AEGIS. Poprzez interfejs użytkownik może wybierać standardowy system do zagłuszania lub wprowadzać parametry sy-gnału zagłuszającego, wraz z chronionymi pasmami częstotliwości, za pośrednic-twem klawiatury numerycznej.
Ponadto możliwy jest wybór metody generowania sygnału zagłuszającego: WGN — na bazie białego szumu gaussowskiego lub CHIRP — na bazie sygnałów z przemiataniem częstotliwości. Użytkownik może także włączać poszczególne

AEGIS — demonstrator technologii C-IED
1 (192) 2013 15
filtry sprzętowe w tor sygnału zagłuszającego oraz sterować mocą poszczególnych generatorów. Pozostałe operacje wykonywane są przez komputer sterujący automa-tycznie, na podstawie wprowadzonych parametrów oraz zapisanego w pamięci algo-rytmu pracy.
Rys. 2. Wygląd interfejsu użytkownika — wybór systemu, zagłuszanie wyłączone
Źródło: opracowanie własne.

Sławomir J. Ambroziak, Ryszard J. Katulski, Jarosław Sadowski, Jacek Stefański
16 Zeszyty Naukowe AMW
Rys. 3. Wygląd interfejsu użytkownika — ręczna konfiguracja, zagłuszanie włączone
Źródło: opracowanie własne.
PODSUMOWANIE
W artykule przedstawiono nadajnik systemu AEGIS, emitujący barierę elek-tromagnetyczną w paśmie od 20 MHz do 3 GHz. Pasmo to obejmuje główny zakres środków, jakie można wykorzystać do bezprzewodowej detonacji IED [7]. Dodat-kowo przewidziano możliwość określania przez operatora tzw. pasm chronionych, dzięki czemu możliwe jest przeciwdziałanie detonacji urządzeń RCIED, przy jedno-czesnym zapewnieniu ciągłości własnej komunikacji. Nadajnik systemu AEGIS jest łatwy w obsłudze dzięki intuicyjnemu interfejsowi użytkownika, natomiast wybór zakłócanych pasm jest ułatwiony dzięki zastosowaniu ekranu dotykowego. Takie rozwiązania pozwalają na dopuszczenie do obsługi urządzenia osoby po krótkim przeszkoleniu.

AEGIS — demonstrator technologii C-IED
1 (192) 2013 17
Zaangażowanie polskiego wojska w ramach międzynarodowych sił wspar-cia bezpieczeństwa w Afganistanie ISAF (International Security Assistance Force) wymagało i nadal wymaga zapewnienia polskim żołnierzom maksimum bezpieczeń-stwa. W tym celu wyposażono ich na przykład w systemy obezwładniania elektro-magnetycznego. Obecnie przez Siły Zbrojne RP stosowane są między innymi system EJAB-MB izraelskiej firmy Elisra czy wypożyczone od Amerykanów urzą-dzenia zagłuszające DUKE — AN/VLQ-12(V)2 [4].
Należy zwrócić uwagę na fakt, że żaden z oferowanych na rynku systemów nie jest w pełni polskim produktem. Co najwyżej może być dystrybuowany przez polskich pośredników. Taki stan rzeczy był głównym powodem rozpoczęcia prac nad systemem AEGIS, do którego głównych zalet należą: szerokie pasmo genero-wanych sygnałów zagłuszających, możliwość wyboru wąskich pasm chronionych, a także nieskomplikowana obsługa. Warto też podkreślić, że rozwiązania zastoso-wane w nadajniku zagłuszającym AEGIS stanowią przedmiot zgłoszenia patento-wego P.398050 [2].
P o d z i ę k o w a n i a
Praca naukowa była finansowana ze środków na naukę w latach 2010–2012 w postaci projektu rozwojowego nr O R00 0007 12. Autorzy pracy pragną podzię-kować za przydzielone na ten cel środki finansowe.
BIBLIOGRAFIA
[1] Ambroziak R., Ambroziak S. J., Katulski R. J., Metody walki z prowizorycz-nymi urządzeniami wybuchowymi w świetle doktryny AJP-3.15, „Zeszyty Naukowe WSOWL”, 2011, nr 4, s. 28–37.
[2] Ambroziak S. J., Katulski R. J., Sadowski J., Stefański J., Układ do kształto-wania widma sygnału radiowego, zgłoszenie patentowe P.398050, 2012.
[3] Ciszewski T., Zarządzanie sytuacją kryzysową w środowisku zagrożonym IED, „Zeszyty Naukowe WSOWL”, 2010, nr 3, s. 205–224.
[4] Hołdanowicz G., Czeskie narzędzie przeciw R2CID, „RAPORT — Wojsko, Technika, Obronność”, 2010, nr 4, s. 26–29.
[5] Kowalkowski S., Improwizowane urządzenia wybuchowe — definicje, „Prze-gląd Wojsk Lądowych”, 2010, nr 6, s. 22–27.

Sławomir J. Ambroziak, Ryszard J. Katulski, Jarosław Sadowski, Jacek Stefański
18 Zeszyty Naukowe AMW
[6] Kowalkowski S., Zagrożenia i przeciwdziałanie IED, „Przegląd Wojsk Lądo-wych”, 2009, nr 5, s. 26–37.
[7] Witczak A., Fiszer R., Saslekov E., Mobilne systemy obezwładniania elektro-nicznego — możliwości realizacji, VIII Konferencja Naukowo-Techniczna KNTWE ’10 „Systemy rozpoznania i walki elektronicznej”, Pisz, 23–25 listo-pada 2010.
A E G I S — T H E C - I E D T E C H N O L O G Y D E M O N S T R A T O R
ABSTRACT
The article presents a technology demonstrator of AEGIS system, destined for Countering Improvised Explosives Devices. An implemented original method of generation of the jamming signal with freely shaped frequency spectrum is also presented. This method is a subject of patent application No. P.398050.
Keywords: improvised explosive devices, IED, C-IED, RCIED, technology demonstrator.

ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1 (192) 2013
19
Wojciech Anigacz Dolnoś ląska Szko ła Wyższa Wydział Nauk Technicznych 53-609 Wrocław, ul. Fabryczna 14 e-mail: [email protected]
T H E T E C H N I C A L A S P E C T S O F P R O T E C T I O N O F I N L A N D N A V I G A T I O N
ABSTRACT
In the article the problem of preserving geometric design conditions by devices of sluices is presented. The problem was illustrated by alignment of the shaft flap of the sluice on the Gliwicki Channel. Within changing the flap drive it was necessary also to perform the realignment of the flap. From the geodetic point of view, the problem was to perform coaxial setting of the two mutually invisible shafts flap within an accuracy not exceeding 0.5 mm. Thanks to first — class measuring equipment and aiding equipments (author’s patents) it was possible to achieve this goal.
Keywords: inland navigation, sluice, alignment.
INTRODUCTION
It is required that technical devices on sluices are permanently in order for their efficiency determines fluency of navigation not only on the concerned sluice, but on the whole water way [2, 3, 4]. Flaps are the most susceptible to damages both from the top and the bottom water. Generally the top water chamber flaps are more complicated than the bottom water flaps. As all devices, sluice flaps require relatively frequent conservation works due to operating in extreme conditions. In the article the problem of preserving geometric design conditions by devices of sluices is pre-sented. The problem was illustrated by alignment of the shaft flap of the sluice on the Gliwicki Channel.

Wojciech Anigacz
20 Zeszyty Naukowe AMW
PROBLEM
From the geodetic point of view, the problem was to perform coaxial setting of the two mutually invisible shafts flap within an accuracy not exceeding 0.5 mm. Initially the investor required accuracy of 0.2 mm, however as a result of negotia-tions with the investor and the designer it was agreed that the accuracy should amount at 0.5 mm. The accuracy of 0.2 mm in this case was unattainable mainly due to lack of shaft adjustment that would be precise enough. The problem comprises two aspects:
— achieving the same level (H) for both shaft axes; — coaxial setting of both the shafts in horizontal alignment (X, Y).
Setting of shaft axes in plane X – Y is presented below.
METHODOLOGY
The difficulty in setting the axes mainly consisted in highly difficult access to the measured shafts due to their:
— being inbuilt into the sluice walls; — location in flap sleeves; — lack of precise enough adjustment of shaft setting.
Accessible points are:
— front surfaces from the internal side of the sluice (fig. 1); — the upper surface of the shaft along the distance of 1 cm from the external side.
It was not possible to see all the measurement points from one measuring position. Therefore it was decided to apply an indirect measurement method with two measuring positions located above the shafts on both sides of the sluice chamber (fig. 2).

The techn
1 (192) 2
Source: o
Fig. 2. Cand
Source: o
Iside of tsulted frsluice ch
nical aspects o
013
Fig.
own study.
Cross vertical pd right (R); B,
A, D
own study.
Indentation mthe sluice chrom explicitnhamber, as w
of protection o
1. Front surfa
profile throug, C — mark o
D — measured
marks (remaamber were ness of the p
well as from t
of inland navig
aces from the
gh flap axes: Af the shaft axi
d (moved) poi
ains from tuaccepted to
points and gothe certainty
gation
internal side o
A – B & C – Dis, from the inints from the e
urning procemark the ref
ood visibilitythat they ma
mark o
of the sluice
D — axis of thnternal side of external side
ss) situated ference line.y from the oark the shaft
of the shaft ax
he shafts, left (
the sluice;
on the inter The choice ther side of axis.
xis
21
(L)
rnal re-the

22
Measure
Source: o
Source: o
ement schem
Fig.
own study.
Fig.
own study.
me is presente
3. Measureme
4. Measureme
ed in figures
ent from statio
ent from statio
3 and 4.
on II. Translat
on I. Translati
W
Zeszyty
tion station I
ion station II
Wojciech Anig
Naukowe AM
gacz
MW

The techn
1 (192) 2
Tthe line mset into tfrom pos
Fshaft axi
Source: o
Source: o
nical aspects o
013
The problemmarked by pthe C – D linsitions I and I
Figures 5 anis setting.
Fig. 5. Positi
own study.
Fig. 6. Posit
own study.
of protection o
m was reduceoints C, D. F
ne. Then, froII respectivel
MEAS
nd 6 shows
ion of the shaf
tion of the sha
of inland navig
d to shifting First, positionm these posily until satisf
SUREMENT
results from
ft axes before
aft axes after t
gation
the externalns of the institions points factory accor
T RESULT
m before and
the repair, cro
the repair, cro
ends of the truments (totA and B we
rdance was ob
TS
d after the co
oss horizontal
ss horizontal p
shafts (A, D)tal station) were being set btained.
orrection of
profile
profile
23
) to were
out
the

Wojciech Anigacz
24 Zeszyty Naukowe AMW
CONCLUSIVE REMARKS
Thanks to first — class measuring equipment and aiding equipments (au-thor’s patents) [1] it was possible to achieve this goal. Using laser equipment was also considered, however the idea was abandoned due to the fact that it was not pos-sible to see the whole line indirectly. From geometric point of view the problem seems easy. The shaft axes need to become coaxial. At the time of works no calcula-tions were carried out. The measured point either was within the line or it was not. If it was not, the shaft end needed to be shifted to the correct position. The correction of shaft setting was performed many times until satisfactory result was obtained. The first test of correctness of shaft setting is measurement of forces on hydraulic actuators, one on each side of the flap. The results of this test were successful. Another very important test is trouble-free service. The flap has been working relia-bly for three years so far. Due to the fact that the sluice has two chambers, the time factor, i.e. the time of excluding a chamber from operation, was of minor importance. The other chamber was used for navigation. The following were used: a total station of direction measurement 0.5” and movable tribrachs with micrometric screws of accuracy 0.005 mm which was the accuracy of measurement. The obtained accuracy of shaft setting of 0.5 mm resulted from mechanical and constructional limitations (lack of flexible, precise enough adjustment of shaft setting) not from measuring possibilities.
REFERENCES
[1] Anigacz W., Marszałek Ł., Statyw do przyrządów geodezyjnych (in English: Screw stand for geodetic devices), No W 116699, The Polish Patent Office, 2008.
[2] ASCE Task Committee, Guidelines for Instrumentation and Measurements for Monitoring Dam Performance, 2000.
[3] Litrico X., Belaud G., Baume J. P.,Ribot-Bruno J., Hydraulic Modeling of an Automatic Upstream Water-Level Control Gate, ‘Journal of Irrigation and Drainage Engineering’, ASCE, March/April 2005, pp. 176–189.
[4] US Army Corps of Engineers Jacksonville District, South Florida Water Management District: CERP Standard Design Manual, USA, 2003.

The technical aspects of protection of inland navigation
1 (192) 2013 25
T E C H N I C Z N E A S P E K T Y Z A B E Z P I E C Z E N I A ŻE G L U G I ŚR Ó D LĄD O W E J
STRESZCZENIE
W artykule przedstawiono problem zachowania projektowych warunków geometrycznych przez urządzenia śluz, co zilustrowano osiowaniem klapy śluzy na Kanale Gliwickim. Przy okazji zmiany sposobu napędu klapy zaszła konieczność jej ponownego osiowania. Z geodezyjnego punktu widzenia problem polegał na współosiowym ustawieniu dwóch wzajemnie niewidocznych wałów klapy z dokładnością nieprzekraczającą 0,5 mm. Dzięki zastosowaniu sprzętu pomiarowe-go najwyższej klasy oraz urządzeń wspomagających (patentów autora) udało się osiągnąć zamie-rzony cel.
Słowa kluczowe: żegluga śródlądowa, śluza, osiowanie.


ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1 (192) 2013
27
Edward Chlebus, Tomasz Boratyński, Damian Opozda, Pawe ł Roczniak Poli technika Wroc ławska Wydział Mechaniczny, Instytut Technologii Maszyn i Automatyzacji, CAMT 50-370 Wrocław, ul. Łukasiewicza 5 e-mail: [email protected]
Jan Bokszczanin, Tomasz Kruk Korporacja Wschód Sp. z o .o. 04-703 Warszawa, ul. Pożaryskiego 28 e-mail: biuro@korporacjawschód.pl
Tomasz Stencel, Maciej Sajkowski Poli technika Ś ląska Wydział Elektryczny, Katedra Energoelektroniki, Napędu Elektrycznego i Robotyki 44-100 Gliwice, ul. B. Krzywoustego 2 e-mail: [email protected]; [email protected]
P R O J E K T , B A D A N I A I W Y K O N A N I E D E M O N S T R A T O R A Z I N T E G R O W A N E G O
S Y S T E M U K I E R O W A N I A A K C JĄ W Y T W O R Z O N E G O T E C H N O L O G I A M I
R A P I D M A N U F A C T U R I N G
STRESZCZENIE
W artykule zaprezentowano wyniki projektu, którego celem były prace badawczo-rozwojowe nad opracowaniem i przetestowaniem w warunkach laboratoryjnych i morskich modelu zintegro-wanego systemu kierowania akcją (ZSKA). Wytworzony za pomocą technologii Rapid Manufacturing demonstrator ZSKA wraz z opracowanym oprogramowaniem specjalistycznym zintegrowano z giro-stabilizowanym morskim systemem monitoringu i innymi urządzeniami nawigacyjnymi statku. ZSKA jest w pełni funkcjonującym systemem, stwarzającym ogromne możliwości prowadzenia prac nad zaprojektowaniem, skonstruowaniem i wdrożeniem jednego lub kilku modeli prototypowych systemów wspomagających sprawowanie nadzoru nad różnymi obszarami, zarówno w zakresie bezpośredniej obserwacji, jak i wspomagania procesu decyzyjnego.
Słowa kluczowe: systemy bezpieczeństwa, systemy wizyjne, projektowanie, CAD, technologie szybkiego prototypowania.

E. Chlebus, T. Boratyński, D. Opozda, T. Roczniak, J. Bokszczanin, T. Kruk, T. Stencel, M. Sajkowski
28 Zeszyty Naukowe AMW
WSTĘP
W artykule zaprezentowano wyniki projektu, którego celem było opracowa-nie i przetestowanie w warunkach laboratoryjnych i morskich wytworzonego za pomocą innowacyjnych technologii Rapid Manufacturing (technologii szybkiego prototypowania) modelu zintegrowanego systemu kierowania akcją (ZSKA) oraz modelu oprogramowania specjalistycznego, integrującego ten system z girostabili-zowanym morskim systemem monitoringu i innymi urządzeniami nawigacyjnymi statku.
Do zasadniczych zadań realizowanych przez szeroko pojmowane morskie systemy monitoringu należą poprawa bezpieczeństwa żeglugi morskiej oraz ochrona środowiska naturalnego na obszarach morskich. Sprawne wykonywanie tych zadań wymaga gromadzenia, przetwarzania i dystrybucji aktualnych danych o sytuacji w strefie własnej odpowiedzialności, zgodnie z posiadanymi przez poszczególne służby nadzoru obszarów morskich kompetencjami. Analiza wykonanych na tej podstawie opracowań umożliwia ostrzeganie o zagrożeniach i przekazywanie infor-macji dotyczących bezpieczeństwa morskiego w celu zapobiegania wypadkom morskim i zagrożeniom ekologicznym oraz sprawne podejmowanie działań w przypadku ich zaistnienia, w tym: wspomagania akcji poszukiwawczo-ratowniczych, wspomagania akcji zwalczania zanieczyszczeń, wspomagania procesu decyzyjnego lub reagowa-nia na zagrożenia niestandardowe, wspomagania zarządzania bezpieczeństwem oraz wspomagania dochodzeń powypadkowych i wykrywania sprawców zanieczyszczeń poprzez wykorzystanie systemów śledzenia, identyfikacji i archiwizacji danych.
Jednostką centralną ZSKA jest wielofunkcyjny panel operatorski TDS-84 ze specjalistycznym oprogramowaniem, dzięki któremu możliwa jest realizacja nastę-pujących funkcji:
— sterowanie głowicą optoelektroniczną stanowiącą autonomiczne źródło infor-macji wizyjnej dla jednostki pływającej; głowica może być sterowana zarówno w trybie zautomatyzowanym, jak i ręcznym;
— dokonywanie kalkulacji czasowo-przestrzennych wspomagających prace nawi-gatorskie;
— integracja ZSKA z urządzeniami pokładowymi jednostki pływającej, takimi jak GPS, busola, MRU (czujnik kołysania jednostki pływającej);
— przyjmowanie informacji o wykrytych obiektach (współrzędne tych obiektów) z radaru pokładowego;

Projekt, badania i wykonanie demonstratora ZSKA…
1 (192) 2013 29
— przyjmowanie informacji z innych systemów zewnętrznych o aktualnej sytuacji na morzu, takich jak na przykład system mapy elektronicznej;
— wyświetlanie obrazów z kamery światła widzialnego oraz kamery termowizyj-nej, a także wyników pomiarów odległości do wykrytych obiektów za pomocą dalmierza laserowego.
ZSKA jest wyposażony w rejestrator umożliwiający archiwizację obrazu, na którym pracuje operator, w czasie rzeczywistym. Wyjście sygnałów wizyjnych z rejestratora zapewnia przesyłanie zobrazowania na zewnętrzny monitor umożliwia-jący podgląd aktualnej sytuacji przez inne osoby pracujące na jednostce pływającej. ZSKA ma też zespół konwerterów umożliwiających jego współpracę z urządzenia-mi i systemami zewnętrznymi, w tym współpracę w zakresie wymiany danych obejmujących aktualną sytuację w rejonie będącym przedmiotem zainteresowania jednostki ratowniczej. Demonstrator ten umożliwia ponadto przesyłanie do głowicy optoelektronicznej sygnałów sterowania z aparatów zewnętrznych. W zależności od potrzeb mogą to być:
— joystick, do sterowania głowicą optoelektroniczną; — przycisk dalmierza laserowego, umożliwiający wykonywanie pomiarów odle-
głości do obserwowanych obiektów; — potencjometr sterowania odległością podświetlacza laserowego pracującego na
rzecz niskozakresowego systemu aktywno-impulsowego.
ANALIZA KONSTRUKCYJNA I FUNKCJONALNA ZINTEGROWANEGO SYSTEMU KIEROWANIA AKCJĄ (ZSKA)
POD KĄTEM TECHNOLOGII WYTWARZANIA
Należało kompleksowo sprawdzić demonstrator systemu ZSKA wraz z pul-pitem sterowniczym w warunkach rzeczywistych. Kaszubski Dywizjon Straży Gra-nicznej w Gdańsku i Morska Służba Poszukiwania i Ratownictwa w Gdyni udostępniły kilka jednostek, na których możliwe było zainstalowanie i przetestowa-nie systemu ZSKA. Wizja lokalna jednoznacznie wykazała, że najlepszy do prze-prowadzenia badań będzie „Kapitan Poinc”.
Na jednostce wskazano potencjalne lokalizacje zarówno dla pulpitu operatora, jak i głowicy optoelektronicznej, która była wykorzystywana jako podstawowe źró-dło informacji w systemie podczas badań na morzu. Głównym ograniczeniem przy doborze miejsca instalacji głowicy była konieczność wykorzystania istniejącej infra-struktury bez możliwości wykonywania dodatkowych otworów montażowych.

E. Chlebus, T. Boratyński, D. Opozda, T. Roczniak, J. Bokszczanin, T. Kruk, T. Stencel, M. Sajkowski
30 Zeszyty Naukowe AMW
BADANIA NIEZAWODNOŚCI KOMPONENTÓW I PODZESPOŁÓW SYSTEMU Z WYKORZYSTANIEM METOD MES I CFD.
OPTYMALIZACJA KONSTRUKCJI NA PODSTAWIE UZYSKANYCH WYNIKÓW
Na podstawie założeń koncepcyjnych zamodelowano w środowisku CAD kilkanaście różnych rozwiązań pulpitu z systemem uchwytów/relingów, z których — po wcześniejszym przedstawieniu w systemie wirtualnej rzeczywistości — wy-brano dwa modele (rys. 1.), najlepiej odpowiadające z punktu widzenia ergono-miczności przyszłemu środowisku pracy.
W celu przeprowadzenia wirtualnej prezentacji modele CAD zaimportowano do programu EON Studio. W programie zostały nałożone odpowiednie kolory, a na ekrany wyświetlaczy nałożono tekstury. W drzewie symulacji EON ustawiono kolor światła padającego na model. Dodatkowo ustawiono port widzenia, definiując za-kres, w którym wirtualny obiekt będzie widoczny w prostokątnym układzie współ-rzędnych. Do oglądania obrazów 3D wymagane są aktywne okulary (migawkowe) typu DLP Link.
Rys. 1. Wybrany model wirtualny pulpitu sterowania oraz jego prototyp fizyczny
Źródło: E. Chlebus, T. Boratyński, T. Będza, D. Opozda, P. Roczniak, P. Krowicki, M. Rusińska, J. Kurzac, M. Olejarczyk, J. Bokszczanin, T. Kruk, T. Tyszka, T. Stencel, M. Sajkowski, Projekt, badania i wykonanie demonstratora Zintegrowanego Systemu Kierowania Akcją Ratowniczą z wykorzystaniem technologii Rapid Manufacturing, raport serii SPR, Wrocław 2012.
Wirtualna prezentacja pozwoliła na dokładne i szczegółowe przedstawienie załodze modeli i ich komponentów. Aby jednak przybliżyć przyszłym użytkowni-kom efekt wprowadzonych zmian, wykonano dwa prototypy demonstratorów ZSKA

Projekt, badania i wykonanie demonstratora ZSKA…
1 (192) 2013 31
w technologii druku przestrzennego wraz ze zoptymalizowanymi uchwytami, do-datkowo do jednego z prototypów dodając funkcję regulacji (dostosowania pulpitu do operatora). Użyto do tego celu technologii addytywnej 3D Printing (urządzenie Spectrum Z510, rys. 2.), która w krótkim czasie pozwala uzyskać modele pokazowe o praktycznie dowolnym kształcie ograniczonym wielkością przestrzeni roboczej. Zasada wytwarzania tą metodą opiera się na warstwowym spajaniu materiału w posta-ci proszku (skrobia, proszek celulozowo-gipsowy, proszki ceramiki) za pomocą trójbarwnego i przezroczystego spoiwa (lepiszcza) nanoszonego przez głowicę dru-kującą. Modele budowane są poprzez nakładanie około 2–4 warstw/min o grubości od 0,089 do 0,203 mm. Modele w celu uzyskania większej wytrzymałości zostały utwardzone poprzez przesycenie materiału żywicą epoksydową, a następnie obro-bione (łączenie, szlifowanie, malowanie).
Rys. 2. Schemat urządzenia do generatywnego wytwarzania
Źródło: M. Rusińska, G. Ziółkowski, E. Chlebus, Application of innovative manufacturing technologies in surgical planning, International Conference ‘Production Engineering 2011’, Wrocław, 30.06 — 01.07.2011.
Uwzględniając charakterystykę obciążenia pulpitu (jednostka ratunkowa podczas akcji w trakcie sztormu), należało wykonać obliczenia wytrzymałościowe MES konstrukcji nośnej przy warunku kilkukrotnego chwilowego obciążenia po-chodzącego od operatora w trakcie użytkowania. Konstrukcja nośna z elementów aluminiowych powinna być lekka, a zarazem zaprojektowana z kilkukrotną wartością

E. Chlebu
32
współczykoncepcjkroje elekonstrukstwa. Ko
Kcym, któnie uznanwspornikkich częwyświetdla operprzenoszpitu. Tu wymaga
Źródło: EJ. Kurzac
Z
jest optyWażne brunkach:
us, T. Boratyńsk
ynnika bezpji nośnych pementów skłkcji przy jednonstrukcje noKonstrukcjęórych diagrano konstrukcka rozchodzęści wewnęttlacza i klawratora. Te mizą obciążenia
należało róania wytrzym
E. Chlebus, T. Bc, M. Olejarczy
Zaprojektowymalne położbyło, aby ro: obrót wzglę
ki, D. Opozda, T
ieczeństwa. pulpitu sterowładowych konoczesnym zośne wykonaę stelażu podamy pokazancję w formie zą się trzy ratrznych pulp
wiatury. Po biejsca są najba w strefę ra
ównież zwerymałościowe.
Rys. 3. Mod
Boratyński, T. Byk, J. Bokszcza
wano ponadtożenie części związanie zaędem osi pio
T. Roczniak, J.
Przeprowadzwania, na poonstrukcji tazachowaniu ano ze stopuddawano wieno na rysunk
zwartej, wykamiona, zapepitu. Zwieńcbokach konstbardziej naraamion, nie deyfikować ko
del MES stelaż
Będza, D. Opoanin, T. Kruk, T
o mechanizmgórnej pulp
apewniało swonowej i pozi
Bokszczanin, T
zono zatem odstawie którak, aby uzyszałożonego aluminium 1elokrotnym
ku 3. Ostateckonanej ze stewniające swczeniem górntrukcji zaplaażone na odkeformując pr
onstrukcję uc
żu pod obciąż
ozda, P. RocznT. Tyszka, T. S
m obrotowy pitu zgodnie wobodę poziomej.
T. Kruk, T. Sten
Zeszyty
obliczenia Mrych dobranoskać relatywwspółczynni
1060. obliczeniom
cznie za najletopu aluminiuwobodny dosnym jest ramanowano mokształcenia, rzestrzeni wechwytów tak
żeniem
niak, P. KrowicStencel, M. Saj
(rys. 4.), któz preferencjycjonowania
ncel, M. Sajkow
Naukowe AM
MES wstępnyo kształt i prnie niską mika bezpiecz
m optymalizuepsze rozwiąum, w której stęp do wszyma mocowantaż uchwytale dzięki teewnętrznej p
k, aby spełni
cki, M. Rusińskjkowski, wyd. c
órego zadanią użytkowni
a w dwóch k
wski
MW
ych rze-
masę zeń-
ują-ąza- od yst-ania tów emu pul-iały
ka, cyt.
iem ika. kie-

Projekt, b
1 (192) 2
Źródło: EJ. Kurzac
Apulpitu Zaluminiozgodnie
Źródło: EJ. Kurzac
badania i wyk
013
E. Chlebus, T. Bc, M. Olejarczy
WYKO
I F
Aby zrozumZSKA (rys. 5owy stelaż, nz wytycznym
Rys. 5
E. Chlebus, T. Bc, M. Olejarczy
onanie demon
Rys.
Boratyński, T. yk, J. Bokszcza
ONANIE POBADANIA
FUNKCJON
mieć istotę us5.), tj. monitona którym zami przyszłyc
5. Stelaż pulpi
Boratyński, T. yk, J. Bokszcza
nstratora ZSKA
. 4. Mechanizm
Będza, D. Opanin, T. Kruk, T
ODZESPOŁA WYTRZYNALNE DEM
sytuowania pora TDS, klawamontowano h użytkowni
itu sterowania
Będza, D. Opanin, T. Kruk, T
KA…
m obrotowy
pozda, P. RoczT. Tyszka, T. S
ŁÓW SYSTYMAŁOŚCIMONSTRA
poszczególnywiatury, dżojkomponenty
ików.
a wraz z oprzy
pozda, P. RoczT. Tyszka, T. S
zniak, P. KrowStencel, M. Saj
TEMU ZSKAIOWE
ATORÓW
ych elementójstików itp., y ZSKA. Ro
yrządowaniem
zniak, P. KrowStencel, M. Saj
icki, M. Rusińsjkowski, wyd. c
A,
ów składowyzaprojektowazmieszczono
m
icki, M. Rusińsjkowski, wyd. c
33
ńska, cyt.
ych ano o je
ńska, cyt.

E. Chlebu
34
Znie jest szybka roszacowprzewod
Mnych (stz sensorwielofuntorze zew
Uwi zmiancji ekranjest możwarunki
Wrowania Produktuszy wido
Źródło: EJ. Kurzac
us, T. Boratyńsk
Ze względu znane, stela
rekonfiguracjwania minimdów elektryczModel rzeczterowanie girów zainstalonkcyjnym mownętrznym),
W
Uchylno-obrnę położenia nu monitora żliwość zmian
do wzajemnWersja ostatezgodnie z te
u LRPD Poliok konstrukcj
Rpo
E. Chlebus, T. Bc, M. Olejarczy
ki, D. Opozda, T
na to, iż doaż zaprojektocja w celu zn
malnego gabaznych, a takż
zywisty stelairostabilizowowanych w onitorze wch na podstawi
WYKONANI
rotowa głowiekranu, dzięprzy zmiennny usytuowa
nej wymiany eczna stała s
echnologią witechniki Wroji 3D CAD p
Rys. 6. Widoko lewej model
Boratyński, T. yk, J. Bokszcza
T. Roczniak, J.
ocelowe, ergowano tak, analezienia oparytu pulpituże przeanalizża posłużył
waną głowicątej głowicy
hodzącym wie których ok
IE DEMON
ica, wybrana ęki czemu nanym oświetleania względeinformacji.
się podstawą wykorzystywaocławskiej. Nulpitu oraz je
k izometrycznl CAD, po pra
Będza, D. Opanin, T. Kruk, T
Bokszczanin, T
gonomiczne aby w czasieptymalnego u operatorskzowania procdo przeprową optoelektroraz ich zo
w skład pulpitkreślono now
NSTRATOR
do dalszychastępuje polepeniu. Kolejnąem innych cz do opracow
aną w LaboraNa rysunku 6ego fizyczną
ny pulpitu steruawej model rze
pozda, P. RoczT. Tyszka, T. S
T. Kruk, T. Sten
Zeszyty
rozmieszczee badań możrozmieszcze
kiego, sposobcesu montażu
wadzenia testroniczną, odbobrazowywantu operatora,
we założenia
A ZSKA
h prac, umożlpszenie waruą zaletą takiezłonków zało
wania konstrukatorium Szyb6. przedstawioą wersję — de
ującego: eczywisty
zniak, P. KrowStencel, M. Saj
ncel, M. Sajkow
Naukowe AM
enie elementżliwa była jenia elementóbu upakowau i serwisu. tów funkcjonbiór informanie zarówno , jak i na mokonstrukcyjn
liwia operatounków obserwego rozwiązaogi, co polep
kcji pulpitu sbkiego Rozwono najważnemonstrator.
icki, M. Rusińsjkowski, wyd. c
wski
MW
tów ego ów, ania
nal-acji
o na oni-ne.
oro-wa-ania psza
ste-woju niej-
ńska, cyt.

Projekt, b
1 (192) 2
Zrozwoju modelu czych trw
Źródło: EJ. Kurzac
Mkoncepcjfunkcjon
Rys. 8. O
Źródło: EJ. Kurzac
badania i wyk
013
Zastosowanidemonstratorzeczywiste
wałoby znac
Rys. 7. Wy
E. Chlebus, T. Bc, M. Olejarczy
Model demoją (rys. 8.),
nalnych przep
Opis rozmieszc
E. Chlebus, T. Bc, M. Olejarczy
onanie demon
ie technologiora, tj. czas oego, co w pznie dłużej [
ybrane przykła
Boratyński, T. yk, J. Bokszcza
onstratora ZSdopracowanprowadzonyc
czenia poszcze
Boratyński, T. yk, J. Bokszcza
nstratora ZSKA
ii szybkiego od momentu
przypadku k[2].
ady wytwarzan
Będza, D. Opanin, T. Kruk, T
SKA został wą w szczegóch z wykorzy
ególnych eleme
Będza, D. Opanin, T. Kruk, T
KA…
prototypowau pojawienia konwencjona
nia części pul
pozda, P. RoczT. Tyszka, T. S
wykonany zgółach podczaystaniem kon
mentów funkcjo
pozda, P. RoczT. Tyszka, T. S
ania znaczącsię pomysłu
lnych techn
lpitu sterownic
zniak, P. KrowStencel, M. Saj
godnie ze wsas prac analitnstrukcji przej
onalnych pulpi
zniak, P. KrowStencel, M. Saj
co skróciło cu do wykonaologii wytw
czego
icki, M. Rusińsjkowski, wyd. c
stępnie przyjtycznych i prjściowych [3
itu sterownicz
icki, M. Rusińsjkowski, wyd. c
35
czas ania wór-
ńska, cyt.
jętą prób 3].
zego
ńska, cyt.

E. Chlebu
36
Psymulacjnym, wyZSKA (transmisjdzeniam
Cpodczas systemu rzystywaprzed przwyłączen
Rys.
Źródło: EJ. Kurzac
Purządzeńjednostcesymulacjpływającwyposażobserwa
us, T. Boratyńsk
BA
Przed badanję sygnałów
ykonano pom(rys. 9.) orasji danych po
mi. Celem tych ppracy systewentylacji p
ania podczaszegrzaniem, nie lub awar
. 9. Rozkład te
E. Chlebus, T. Bc, M. Olejarczy
BA
Po zainstaloń pokładowye pływającejję przyrząducej (jednostkażeniu tego tyacji z wykorz
ki, D. Opozda, T
ADANIA LA
niami właściww urządzeń pmiary temperaz przeprowaomiędzy TD
pomiarów byemu. Uzyskapulpitu opers nieprzerwanktóre może
rię.
emperatur na p
Boratyński, T. yk, J. Bokszcza
ADANIA M
owaniu i uruych ze wskaz (kompas, ży
u przekazująca pływająca, ypu sprzętu)
zystaniem sys
T. Roczniak, J.
ABORATOR
wymi (tj. w pokładowychatury różnycadzono anal
DS-84 i wszy
yło określenieane wyniki ratora ZSKAnej wielogodspowodować
płycie czołow
Będza, D. Opanin, T. Kruk, T
MORSKIE D
uchomieniu zaniami rzeczyrobusola i Gcego dane o na której prz
). W ramachstemu ZSKA
Bokszczanin, T
RYJNE I L
warunkachh na mobilnych obszarów lizę stanów ystkimi wspó
e miejsc najbzostały wyk
A. System prdzinnej pracyć jego niekon
wej wielofunkc
pozda, P. RoczT. Tyszka, T. S
DEMONSTR
całego systezywistych urGPS). Dodatkprzechyłachzeprowadzanh badań przeA (rys. 10.).
T. Kruk, T. Sten
Zeszyty
LĄDOWE
morskich) pym stanowispulpitu sterologicznych
ółpracującym
bardziej rozgkorzystane drzewidywanyy i musi byćntrolowane z
cyjnego monit
zniak, P. KrowStencel, M. Saj
RATORA
emu zjustowrządzeń zainkowo do ZS
h i przegłębieno badania nieprowadzono
ncel, M. Sajkow
Naukowe AM
przeprowadzosku laboratorowania systew protokoła
mi z TDS ur
rzewających do opracoway jest do wykć zabezpieczozawieszenie
tora TDS-84
icki, M. Rusińsjkowski, wyd. c
wano symulastalowanychKA podłączo
eniach jednosie ma na swoo testy i pró
wski
MW
ono ryj-
emu ach rzą-
h się ania yko-ony się,
ńska, cyt.
ator h na ono stki oim óby

Projekt, badania i wykonanie demonstratora ZSKA…
1 (192) 2013 37
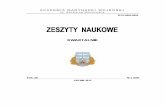
Rys. 10. Obraz widoku obiektu (pracownik na rusztowaniu) w skali normalnej,
widok z kamery termograficznej i obraz z kamery termograficznej w powiększeniu maksymalnym
Źródło: E. Chlebus, T. Boratyński, T. Będza, D. Opozda, P. Roczniak, P. Krowicki, M. Rusińska, J. Kurzac, M. Olejarczyk, J. Bokszczanin, T. Kruk, T. Tyszka, T. Stencel, M. Sajkowski, wyd. cyt.
PODSUMOWANIE
Wykonane próby morskie pozwoliły zauważyć, że przyjęta do realizacji koncepcja zintegrowanego systemu kierowania akcją charakteryzuje się bardzo roz-ległą funkcjonalnością. Pozwala to na stworzenie załodze jednostki ratowniczej możliwości bezpośredniego dostępu do kompleksowej informacji o sytuacji w rejonie działań na morzu. Zasób zgromadzonej oraz zobrazowywanej przez ZSKA informacji, która jest dostępna bez specjalnych ograniczeń dla wszystkich zainteresowanych osób funkcyjnych jednostki ratowniczej, pozwala na znaczne ograniczenie koniecz-ności dokonywania uzgodnień słownych i wzajemnego przekazywania sobie infor-macji cząstkowych.
Niestety, rozległa funkcjonalność okupiona została bardzo dużą ilością in-formacji przetwarzanej przez jednostkę centralną systemu, czyli moduł operatorski ZSKA, oraz koniecznością wykonywania dużej ilości czynności manualnych, co wymaga dalszych prac badawczo-rozwojowych.
BIBLIOGRAFIA
[1] Chlebus E., Boratyński T., Będza T., Opozda D., Roczniak P., Krowicki P., Rusińska M., Kurzac J., Olejarczyk M., Bokszczanin J., Kruk T., Tyszka T., Stencel T., Sajkowski M., Projekt, badania i wykonanie demonstratora Zinte-growanego Systemu Kierowania Akcją Ratowniczą z wykorzystaniem techno-logii Rapid Manufacturing, raport serii SPR, Wrocław 2012.
[2] Chlebus E., Boratyński T., Dybała B., Frankiewicz M., Kolinka P., Innowa-cyjne technologie Rapid Prototyping — Rapid Tooling w rozwoju produktu, Oficyna Wydawnicza Politechniki Wrocławskiej, Wrocław 2003.

E. Chlebus, T. Boratyński, D. Opozda, T. Roczniak, J. Bokszczanin, T. Kruk, T. Stencel, M. Sajkowski
38 Zeszyty Naukowe AMW
[3] Chlebus E., Boratyński T., Dybała B., Zastosowanie technologii generatyw-nych w projektowaniu i wytwarzaniu, [w:] CAD systems and technologies: sys-tems — equipment — proces, Kraków 2008.
[4] Rusińska M., Ziółkowski G., Chlebus E., Application of innovative manufac-turing technologies in surgical planning, International Conference ‘Production Engineering 2011’, Wrocław, 30.06 — 01.07.2011.
DESIGN, TESTING AND IMPLEMENTATION AN INTEGRATED RESCUE COMMAND SYSTEM MANUFACTURED USING INNOVATIVE RAPID
MANUFACTURING TECHNOLOGIES
ABSTRACT
This paper contains project results. The project goal was to research, develop and test (in laboratory and sea conditions) an Integrated Rescue Command System (IRCS) functional model. IRCS, manufactured using innovative Rapid Manufacturing technologies, along with spe-cialized software that was also developed were integrated with gyro-stabilized Sea Monitoring System and other ship navigation devices. IRCS functional model that was developed is a fully operational system that creates opportunity to design, manufacture and implement one or several prototype multi-area supervision systems intended for both direct monitoring and aiding decision process.
Keywords: security systems, vision systems, mechanical design, CAD, rapid prototyping technologies.

ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1 (192) 2013
39
Stanis ław Dobrociński, Leszek Flis Akademia Marynarki Wojennej Wydział Mechaniczno-Elektryczny, Instytut Budowy i Eksploatacji Okrętów 81-103 Gdynia, ul. J. Śmidowicza 69 e-mail: [email protected]; [email protected]
Jerzy Ma łachowski Wojskowa Akademia Techniczna Wydział Mechaniczny, Katedra Mechaniki i Informatyki Stosowanej 00-908 Warszawa, ul. S. Kaliskiego 2 e-mail: [email protected]
S T A B I L N OŚĆ R O Z W IĄZ AŃ S P RĘŻY S T O - P L A S T Y C Z N Y C H Z A G A D N I EŃ
D Y N A M I K I
STRESZCZENIE
W artykule przedstawiono wyniki obliczeń numerycznych zagadnienia rozchodzenia się fali naprężenia na przykładzie prostego pręta izotropowego. Wyniki numeryczne w zakresie sprę-żystym odniesiono do rozwiązania analitycznego, wskazując na poprawne działanie algorytmu. W zakresie plastycznym nie ma rozwiązań analitycznych, zaproponowano więc numeryczne rozwiązanie zagadnienia. Zastosowano algorytm obliczania naprężenia, który uwzględnia mak-symalne wartości tego parametru w rozpatrywanym obszarze i modyfikuje krok czasowy w trakcie obliczeń dla utrzymania stabilności rozwiązania. Modyfikacji w trakcie obliczeń ulega również macierz sztywności, ponieważ w czasie rozpatrywanego zjawiska materiał ulega umocnieniu.
Celem pracy jest zwrócenie uwagi na znaczenie doboru kroku czasowego zapewniają-cego stabilność rozwiązania podczas obliczeń, szczególnie gdy materiał przechodzi ze stanu sprężystego w plastyczny. Zaproponowany algorytm przyspiesza rozwiązanie przy zachowaniu stabilności obliczeń w porównaniu z klasyczną metodą iteracyjną.
Słowa kluczowe: MES, dynamika, fala sprężysto-plastyczna.

Stanisław Dobrociński, Leszek Flis, Jerzy Małachowski
40 Zeszyty Naukowe AMW
WSTĘP
Zagadnienia dynamiki charakteryzują się tym, że w poszczególnych punk-tach rozważanego obszaru występuje dociążenie lub odciążenie konstrukcji [5]. W pracy rozpatruje się deformacje sprężyste oraz plastyczne w ciałach izotropo-wych i jednorodnych. Zagadnienia tego typu komplikuje znacznie fakt, że po przej-ściu fali uplastyczniającej materiał ulega wzmocnieniu. Dlatego przy powtórnym przejściu fali propagują się one w ciele, napotykając różne granice sprężystości w poszczególnych punktach rozważanego obszaru. Istotna uwaga wynikająca z roz-ważań w niniejszej pracy dotyczy faktu, że w przypadku gdy w materiale wystąpią naprężenia powyżej granicy sprężystości, to część energii tracona jest na odkształcenia plastyczne i przy odciążeniu energia kinetyczna musi być pomniejszona o energię traconą [6].
Rozpatrzono pręt (rys. 1.) o stałym przekroju i przyjęto, że odkształcenia są na tyle małe, iż możemy stosować zasadę płaskich przekrojów, pomijając wpływ przemieszczeń poprzecznych na przemieszczenia wzdłużne.
Rys. 1. Rozpatrywany schemat uderzenia masy m w pręt o długości l. Pręt o średnicy d = 0,01 m, długości l = 20 m i gęstości ρ = 7850 kg/m3 jest na prawym końcu
utwierdzony, a na lewym końcu znajduje się masa skupiona mw = 3298,45 kg
Źródło: opracowanie własne.
Pręt wykonany jest ze stali 10GHMBA (węgiel, magnez, chrom, molibden, bar). Charakterystykę stali określono na podstawie próby jednoosiowego rozciąga-nia (rys. 2.). Aproksymując tę charakterystykę funkcją sklejaną, według poniższych zależności, otrzymano bardzo dobrą zgodność funkcji aproksymującej i funkcji aproksymowanej, określonej z eksperymentu.

Stabilność rozwiązań sprężysto-plastycznych zagadnień dynamiki
1 (192) 2013 41
dla 0dladladladla
Rys. 2. Przyjęta charakterystyka materiałowa stali 10GHMBA, gdzie:
E = 2,08·105 MPa — moduł Younga, Ew = 1,25·105 MPa — wzmocnienie, = 612,96 MPa, = 703,90 MPa, , 7,2866·10-3
Źródło: opracowanie własne.
OPIS DYSKRETNY PRĘTA
Aby ocenić wpływ nieliniowej części charakterystyki, opisanej funkcją , rozpatrzymy trójwęzłowy element pręta o długości le. Przemieszczenia
dowolnego punktu elementu pręta zapiszemy jako kombinację przemieszczeń jego węzłów [ ])(),(),( 321 tUtUtUT =U oraz funkcji kształtu )](),(),([ 321 xxx ϕϕϕ=Φ
)()(),( txtxu UΦ= .

Stanisław Dobrociński, Leszek Flis, Jerzy Małachowski
42 Zeszyty Naukowe AMW
Prędkość i przyspieszenie wyrażamy również za pomocą wartości węzłowych
)()(),( txtxu UΦ && = , )()(),( txtxu UΦ &&&& = .
Energię kinetyczną elementu pręta dxuAEel
k ∫=0
2
2&
ρ zapisujemy za pomocą
wartości węzłowych, otrzymując
UMUUΦΦU &&&& eTl
TTk
e
dxAE21
21
0
== ∫ ρ ,
gdzie:
∫=el
T dxA0
ΦΦMe ρ — macierz bezwładności elementu pręta;
A — pole przekroju porzecznego pręta.
Odkształcenia w elemencie wyrażą się wzorem UΦ x,tx =),(ε . Jeżeli do
całkowania będziemy wykorzystywać metodę Gaussa, to w i-tym punkcie odkształ-cenie wyrazi się jako UΦ )(),( ix,i xtx =ε . Dla pięciopunktowej procedury Gaussa
otrzymamy:
[ ] [ ]U)()()( ,3,2,154321 ixixixT xxx ϕϕϕεεεεε = .
Oznaczając [ ])()()( ,3,2,1 ixixix xxx ϕϕϕ=Β odkształcenia w punktach cał-
kowania, zapiszemy macierzowo UBε = . Odkształceń poszukujemy dla j-tego przyrostu obciążenia. Jeżeli w kolejnym kroku obciążenia przemieszczenie wzrasta o wartość ΔU, to całkowite przemieszczenia zapiszemy jako
Uj=Uj-1+ ΔU, i dalej
εj = εj-1+Δε = εj-1+B ΔU, przy czym TBU
=∂∂Δε
.

Stabilność rozwiązań sprężysto-plastycznych zagadnień dynamiki
1 (192) 2013 43
KOREKCJA MACIERZY SZTYWNOŚCI W ZALEŻNOŚCI OD OBCIĄŻENIA
Rozpatrzono następujące przedziały uwzględniane przy określaniu energii właściwej:
1. P r ę t z n a j d u j e s i ę w s t a n i e s p r ę ż y s t y m (rys. 3a), czyli
01 )( εεε ≤Δ+−i .
Energia właściwa w takim przypadku wynosi
( ) ])([22
211
21 εεεεε Δ+Δ+Φ=Δ+=Φ −−− iiii
EE .
Obliczamy pochodną energii właściwej względem przyrostu przemieszczeń
( )UBBBU
ΔεΔΦ TT
iE +=∂∂
−1 ,
a następnie całkujemy po objętości pręta, otrzymując
UKQU
ΔΔΦ ee
li dxA
e
+=∂∂∫0
,
gdzie:
( ) dxAdxEAee l
Ti
lT
ie ∫∫ −− ==
01
01 BBQ σε jest wektorem (macierz jednokolumnowa);
( )dxEAel
Te ∫=0
BBK jest macierzą.
2. P r ę t z n a j d u j e s i ę w s t a n i e s p r ę ż y s t y m 01 εε <−i , natomiast skut-
kiem przyrostu obciążenia ( ) 01 εεε >Δ+−i są odkształcenia plastyczne (rys. 3b).
Odkształcenia plastyczne zapiszemy jako
( ) iiip 01001 εεΔεεεΔεεΔεε −=−−=−+= −− . Dla tego przypadku określamy energię właściwą
( ) ( )2000
20 2
121
21
21
iwirrpwprri EE εεΔεεΔσεσεεσεσΦ −+−+=++= ;

Stanisław Dobrociński, Leszek Flis, Jerzy Małachowski
44 Zeszyty Naukowe AMW
( ) ]2)[(21
21
21
022
000 iwriwirri EE εεΔεΔεΔσεεσεσΦ −+++−= .
Po kolejnych przekształceniach otrzymujemy
]2)[(21
02
0 iwrii E εεΔεΔεΔσΦΦ −++= .
Rys. 3. Rozpatrywane przedziały uwzględniane przy określaniu energii właściwej
Źródło: opracowanie własne.

Stabilność rozwiązań sprężysto-plastycznych zagadnień dynamiki
1 (192) 2013 45
Człon i0Φ nie zależy od przyrostu przemieszczeń, stąd
( )iTw
iT
wT
wT
rEEE 00 2
21 εεΔεΔ
εεΔσ
ΔΦ
−∂
∂+−+=
∂∂ BBUBBB
U lub
UBBBU
ΔεΔεε
εσΔΦ Tw
wT
r
wiwr
EE
EE ⎟
⎠⎞
⎜⎝⎛
∂∂
++⎟⎠⎞
⎜⎝⎛
∂∂
−−=∂∂
21
0 .
Wprowadzamy oznaczenia
dxEEdxEE Tl
wwr
Tl
iw
iwre
ee
BBQ ∫∫ ⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛
∂∂+−=⎟
⎠⎞
⎜⎝⎛
∂∂−−=
0000 εΔ
εσε
εεσ ;
( ) dxEEdxEEee l
Ti
ww
Tl
iw
we BBBBK ∫∫ ⎥⎦
⎤⎢⎣⎡ −
∂∂
+=⎟⎠⎞
⎜⎝⎛
∂∂
+= −0
100
0 21
21 εε
εε
ε .
3. P r ę t z n a j d u j e s i ę w s t a n i e p l a s t y c z n y m ( ) 01 εεε >Δ+−i (rys. 3c).
Na podstawie rysunku 3c określamy energię właściwą
211 )(
2εΔεΔσΦΦ w
iiiE
++= −−
i obliczamy pochodną
21 )(
21 εΔ
εΔσ
ΔΦ TwT
wT
iEE
UBUBBB
∂∂
++=∂∂
− .
Analogicznie jak w poprzednich punktach przyjmujemy
( ) ( )dxEE,dxee l
Tww
el
Ti
e ∫∫ ⎟⎠⎞
⎜⎝⎛
∂∂
+== −00
1 21 BBKBQ εΔ
εσ .
Wykorzystując równania Lagrange’a, otrzymujemy następujące równanie ruchu pręta:
QUMUK =+ &&Δ .

Stanisław Dobrociński, Leszek Flis, Jerzy Małachowski
46 Zeszyty Naukowe AMW
Całkowania równia ruchu dokonamy metodą Newmarka z krokiem cza-sowym tΔ . Znając dla czasu t wartości przemieszczenia tU , prędkości tU& oraz
przyspieszenia tU&& , poszukujemy tych wartości dla czasu tt Δ+ według wzorów:
( ) ( ) ttttttttttttt UUUt
U,UUt
UU)t(
U &&&&&&& −−=−−−= ++++ ΔΔΔΔ ΔΔΔ244
2 .
Jeżeli przyjmiemy UUU ttt ΔΔ +=+ , to równanie ruchu zapisze się wzorem
QUUMUMK −⎟⎠⎞
⎜⎝⎛ +=⎥
⎦
⎤⎢⎣
⎡+= ttt)t(
F &&&Δ
ΔΔ
442 .
W przypadku gdy pręt znajduje się w stanie plastycznym, to wartość K za-leży od rozwiązania, czyli zagadnienie jest nieliniowe. Dlatego wartości przyrostu przemieszczenia w danym kroku czasowym poszukiwać będziemy iteracyjnie, wy-korzystując metodę Newtona. Jeżeli przyjmiemy
QUUMUMK +⎟⎠⎞
⎜⎝⎛ +−⎟
⎠⎞
⎜⎝⎛ += tttt
F &&&Δ
ΔΔ
442 ,
to
tdd
dd
tF U
UKU
UKMK
U Δε
εΔ
Δε
εΔΔ ∂∂
−∂∂
+⎟⎠⎞
⎜⎝⎛ +=
∂∂
24 ,
ponieważ ,l
UUt Δε +=
to
ludd 1=Δε
.
Zgodnie z metodą Newtona, w kolejnym kroku iteracyjnym obliczamy po-
prawkę dla przemieszczenia według wzoru
FUUF −=
∂∂ δΔ
,
a następnie obliczamy UUU δΔΔ += .
Opisując materiał charakterystyką biliniową (rys. 3d), we wzorach na obli-czanie macierzy sztywności wielkość 0=∂∂ ε/Ew . Jeżeli weźmiemy pod uwagę

Stabilność rozwiązań sprężysto-plastycznych zagadnień dynamiki
1 (192) 2013 47
dwa sąsiadujące punkty pręta, przy czym jeden z nich znajduje się w stanie spręży-stym, a drugi w stanie plastycznym, to wystąpi skokowa zmiana wyrazów macierzy sztywności odpowiadających tym punktom [2]. Uwzględniając nieliniową część charakterystyki, uzyskamy w miarę monotoniczną zmianę wyrazów macierzy sztyw-ności. Oczywiście zmiana zależy od przyrostu obciążenia, gęstości podziału rozwa-żanego obszaru na elementy oraz wielkości kroku czasowego.
WYKORZYSTANIE ALGORYTMU NA PRZYKŁADZIE PROPAGACJI FALI NAPRĘŻENIA W PRĘCIE
Rozpatrzono przypadek, gdy masa uderzająca jest równa masie pręta. Nie możemy przyjąć, że naprężenia w całym pręcie są takie same. Musimy wziąć pod uwagę propagację frontu fali naprężenia wzdłuż osi pręta. W tym przypadku, jeżeli masa uderzająca porusza się z prędkością v0, to dla czasu t0 w przekroju pręta x = 0
powstaną naprężenia ovaρσ =1 , gdzie ρEa = jest prędkością propagacji czoła
fali naprężenia. Przyjmując prędkość masy uderzającej taką (v0 = 6,067 m/s), aby dla czasu
t = 0 naprężenie 001 4,0 σσσ ===x
, mamy pewność, że po odbiciu od utwierdzenia
naprężenie Lxn =
= σσ (wzrastają dwukrotnie) nie przekroczy granicy sprężystości.
Pręt będzie się znajdował w stanie sprężystym i rozwiązanie analityczne [3] (rys. 4.) jest niemal identyczne z rozwiązaniem numerycznym (rys. 5.). W momencie, gdy σ1 przyjmuje wartość zero, to czas t = tk i następuje oderwanie masy uderzającej od pręta.
Przyjmując prędkość v0 taką, aby dla czasu t = 0 naprężenie 001 8,0 σσσ ===x
,
otrzymamy rozwiązanie przedstawione na rysunku 6. W końcowej części pręta wystąpią odkształcenia plastyczne (rys. 7.).

48
Rys. 4. T
Źródło: K
Ry
Źródło: o
Teoretyczny prpręta mas
Kaliski S. i inn
ys. 5. Rozwiąz
opracowanie w
σ1
rzebieg przemsą m (x = 0) (a
ni, Drgania i f
zanie numerycprzy założen
własne.
u/
1/σ0
Stanisław D
mieszczenia w a) i naprężenia
fale w ciałach
czne uderzeniniach: 1 0σ =
/umax
σn/σ0
at/l
Dobrociński, L
punkcie środka w punktach
stałych, PAN
ia w pręt w za040 σ, , lT 00 =
Leszek Flis, Jer
Zeszyty
kowym uderza(x = 0 i x = l)
N, Warszawa 1
kresie sprężysa/ 40
K
rzy Małachow
Naukowe AM
anej powierzc(b)
966.
stym masą
t/T0
K
a
wski
MW
chni
at/l

Stabilnoś
1 (192) 2
Ry
Źródło: o
Źródło: o
ść rozwiązań s
013
ys. 6. Rozwiąz
opracowanie w
Rys. opracowanie w
ε/
σ1/σ
sprężysto-plas
zanie numerycprzy założe
własne.
7. Odkształcewłasne.
/ε0
u/um
σ0
stycznych zaga
czne uderzenieniach: 1 0σ =
enia plastyczn
max — sprężys
σn/σ
adnień dynam
ia w pręt w za080 σ, , lT 00 =
ne w końcowej
ste z rys. 7.
σ0
miki
kresie sprężysa/ 40
j części pręta
x
K
stym masą
m
t/T0
49

Stanisław Dobrociński, Leszek Flis, Jerzy Małachowski
50 Zeszyty Naukowe AMW
Na długości 0,15 m sztywność pręta zmienia się według stosunku wE/E , czyli w granicach 00601 ,− . Dla biliniowej charakterystyki materiału wystąpiłaby skokowa zmiana sztywności powodująca złe uwarunkowanie macierzy sztywności pręta. Uwzględniając nieliniową część charakterystyki w przedziale odkształceń ( )10 εε , oraz odpowiednio gęsty podział na elementy, uzyskujemy monotoniczną zmianę współczynników macierzy sztywności.
Jeżeli przyjmiemy prędkość v0 taką, aby dla czasu t = 0 naprężenie
001 02 σσσ ,x == = , otrzymamy rozwiązanie przedstawione na rysunku 8.
Rys. 8. Rozwiązanie numeryczne uderzenia w pręt w zakresie plastycznym masą przy założeniach: 01 02 σσ ,= , a/lT 200 =
Źródło: opracowanie własne. W obu końcach pręta występują odkształcenia plastyczne (rys. 9.). Energia
kinetyczna masy uderzającej wynosi
20 50 uuk vm,E = ,
t/T0
u/umax
σ1/σ0
σn/σ0
v/vmax
K

Stabilnoś
1 (192) 2
natomias
Onostkow
Zdać spad
Źródło: o
ść rozwiązań s
013
st energię kin
Obliczając ewych, otrzyma
Zmianę enerdek energii ca
Ryopracowanie w
εpl/ε0
sprężysto-plas
netyczną prę
E
energię jako amy
rgii w czasieałkowitej ko
s. 9. Odkształwłasne.
0
stycznych zaga
ęta dla czasu
∫=l
k uAE0
2
2&
ρ
pracę sił we
∫=l
sAE
02
σ
e przedstawiosztem trwały
cenia plastycz
adnień dynam
t obliczymy
dx)x(2 .
ewnętrznych
dxεσ .
ono na rysunych odkształc
zne w obu koń
miki
wzorem
h na przemie
nku 10., gdziceń plastyczn
ńcach pręta
x m
szczeniach j
ie wyraźnie nych.
m
51
jed-
wi-

Stanisław Dobrociński, Leszek Flis, Jerzy Małachowski
52 Zeszyty Naukowe AMW
Rys. 10. Zmiana energii w czasie z widoczną stratą energii całkowitej na odkształcenie plastyczne
Źródło: opracowanie własne.
WNIOSKI
Obliczenia numeryczne w zakresie sprężystym są zgodne z obliczeniami analitycznymi. W zakresie sprężysto-plastycznym i plastycznym wykorzystano ten sam algorytm, a wyniki obliczeń numerycznych wydają się intuicyjnie poprawne. Do ostatecznej weryfikacji algorytmu, zarówno w tym, jak i we wszystkich zagad-nieniach plastycznych, konieczna jest weryfikacja eksperymentalna.
Obliczenia wykonano na komputerach Centrum Informatycznego Trójmiejskiej Aka-demickiej Sieci Komputerowej.
Ek/Ek0
t/T0
V/V0
Es/Ek0
(Ek+Es)/Ek0

Stabilność rozwiązań sprężysto-plastycznych zagadnień dynamiki
1 (192) 2013 53
BIBLIOGRAFIA
[1] Bathe K. J., Finite Element Procedures, Prentice Hall, New Jersey 1996.
[2] Dobrociński S., Stabilność rozwiązań zagadnień odporności udarowej kon-strukcji, Akademia Marynarki Wojennej, Gdynia 2000.
[3] Kaliski S. i inni, Drgania i fale w ciałach stałych, PAN, Warszawa 1966.
[4] Kłosowski P., Woźnica K., Weichert D., Comparision of numerical modeling and experiments for the dynamic response of circular elasto-viscoplastic pla-tes, ‘European Journal of Mechanics’, 2000, 19, A/Solids.
[5] Meyers M. A., Dynamic behaviour of materials, A Wiley-Interscience Publi-cation, 1994.
[6] Potter D., Metody obliczeniowe fizyki, PWN, Warszawa 1977.
S T A B I L I T Y O F S O L U T I O N S E L A S T I C - P L A S T I C D Y N A M I C I S S U E S
ABSTRACT
This paper presents the results of numerical wave propagation problems with the example of a simple isotropic bar tension. Numerical results were compared to the elastic ana-lytical solution, indicating the correct algorithm operation. There are no analytical solutions in terms of plastic conditions, so the numerical solution of this problem is proposed. The article gives an algorithm for calculating the stress that includes account the maximum value of the parameter in this question and in the same time modifies the time step in the calculations for the stability of the solution. Modifications in the calculation of the stiffness matrix are caused by the phenomenon of material strengthening. The proposed algorithm dramatically accelerates the solution when the stability of the computation takes place comparing to classical iterative method.
The aim of this study is to highlight the importance of the selection of the time step in calculating the stability of solutions, especially when the state of elastic material goes into plastic.

Stanisław Dobrociński, Leszek Flis, Jerzy Małachowski
54 Zeszyty Naukowe AMW
The proposed algorithm accelerates the solution when the stability of the computation takes place and compared to classical iterative method.
Keywords: finite element method, dynamic, elastic-plastic wave.

ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1 (192) 2013
55
Wojciech Homik Poli technika Rzeszowska Wydział Budowy Maszyn i Lotnictwa, Katedra Konstrukcji Maszyn 35-959 Rzeszów, al. Powstańców Warszawy 8 e-mail: [email protected]
M E T R Y K A W I S K O T Y C Z N E G O TŁU M I K A D R G AŃ S K RĘT N Y C H
STRESZCZENIE
W artykule opisano zagadnienia związane z procesem wzbudzania drgań skrętnych ukła-dów napędowych jednostek pływających, a także metody ich tłumienia. Skoncentrowano się głównie na metodzie pośredniej — zastosowaniu tłumika wiskotycznego, opisując jego „metrykę” zawierającą podstawowe parametry konstrukcyjne, fizyczne oraz charakterystyki amplitudowo- -częstotliwościowe.
Słowa kluczowe: drgania skrętne, tłumik wiskotyczny.
WSTĘP
Użytkownicy jednostek pływających, zwłaszcza okrętów wojennych, ocze-kują od ich projektantów i producentów, by były przede wszystkim niezawodne w trudnych warunkach eksploatacji. Jednym z podstawowych zespołów, którego trwałość i niezawodność przekłada się w sposób bezpośredni na niezawodność jed-nostki pływającej, jest silnik. Niezawodność wielocylindrowych silników spalino-wych zależy nie tylko od projektantów i producentów silników, ale także — a może przede wszystkim — od ich użytkowników.
Wielu z nich w trakcie użytkowania silników ogranicza się jedynie do wy-miany podstawowych materiałów eksploatacyjnych (np. wymiany olejów, filtrów itp.), nie zdając sobie sprawy z konieczności diagnozowania, serwisowania czy

Wojciech Homik
56 Zeszyty Naukowe AMW
wymiany innych zespołów, których stan techniczny przekłada się w sposób bezpo-średni na ich żywotność i niezawodność.
Problem ten dotyczy między innymi tłumików drgań skrętnych, które pracu-ją w stanach okresowo zmiennych oraz w zmiennych warunkach atmosferycznych. Ich stan techniczny decyduje o żywotności i niezawodności podstawowego układu wielocylindrowego silnika spalinowego, którym jest układ korbowo-tłokowy, a także układu rozrządu.
Wieloletnia współpraca autora z producentem samochodowych i serwisan-tem okrętowych tłumików drgań skrętnych firmą DAMPOL oraz uzyskane w ramach tej współpracy doświadczenie pozwala wnioskować, że znacząca część użytkowni-ków silników nie wie, co to jest tłumik drgań skrętnych i jak ważnym z punktu wi-dzenia trwałości silnika jest jego stan techniczny.
Problem ten dotyczy w głównej mierze użytkowników pojazdów samocho-dowych. Większą świadomość i wiedzę z tego zakresu mają użytkownicy silników okrętowych. Wynika to głównie z tego, że użytkowane przez nich jednostki pływa-jące podlegają okresowym przeglądom dokonywanym przez Towarzystwa Klasyfi-kacyjne, takie jak GL (Germanischer Lloyd), DNV (Det Norske Veritas), Lloyd’s Register of sliping, Buremu Veritas, PRS (Polski Rejestr Statków) i MRMRS (Ro-syjski Rejestr Statków). Coraz częściej zdarzają się jednak przypadki, że i tu zapo-mina się o istnieniu w układzie tłumika drgań skrętnych — aż do momentu remontu kapitalnego jednostki.
ŹRÓDŁA DRGAŃ SKRĘTNYCH I METODY ICH TŁUMIENIA
Niezależnie od układu dynamicznego, w którym pracuje silnik, największe zagrożenie dla wału korbowego stanowią drgania skrętne [3, 7, 11, 13, 14, 15, 16]. Spośród szeregu sił działających w układzie korbowo-tłokowym, ruch obrotowy wału korbowego powoduje siła T styczna do okręgu zataczanego przez wykorbienie. Siła styczna T wpływa na wartość momentu obrotowego silnika, który jest równy. Zmienność siły T wywołuje dodatnie i ujemne przyspieszenia w ruchu obrotowym wału korbowego silnika, powodując powstawanie drgań skrętnych, które zmieniają się wraz ze zmianą prędkości obrotowej wału. Przebieg sił stycznych T w funkcji kąta obrotu ϕ wału korbowego przedstawia się najczęściej w postaci wykresu nazywane-go wykresem sił stycznych. Niejednokrotnie podczas prowadzonych analiz wykresy T(ϕ) zastępowane są wykresami jednostkowymi sił stycznych t(ϕ) [3, 12, 14].

Metryka w
1 (192) 2
Wjest takż(rys. 1.)
gdzie: Iss — mIsw — mωp — pH — r
W
Zagadniewających
Źródło: o
Mnimalizo
— zmi— zmi— zmi— zast
wiskotyczneg
013
W układachże mająca duśruba napędo
masowy mommasowy momprędkość kątrząd harmon
Warto pamięenie to jest nh i doczekało
Rys. 1. Rze
opracowanie w
Maksymalneować przez:
ianę prędkośianę częstościanę przebiegtosowanie tłu
go tłumika drg
h napędowycużą bezwodnowa [4, 12, 1
Mws
ment bezwłament bezwłatowa śruby;icznej zgodn
ętać, że śrubaniezwykle iso się wielu o
eczywisty i za
własne.
e amplitudy d
ci obrotowycci drgań własgu sił wymusumików drga
gań skrętnych
ch jednostek ność zamon7]. Moment
( 10120 I.. ⋅=
adności śrubyadności wody
ny z wielokro
a zanurzona wstotne dla propracowań [2
astępczy układ
drgań skrętn
ch silnika; snych całegoszających; ań (fot. 1.).
pływającycntowana na w
wzbudzający
) ,2
hII p
swssω
+
y; y zabieranej p
otnością liczb
w wodzie jeracy układu n2, 4, 8, 9, 10]
d napędowy je
nych wału ko
o układu;
h źródłem dwolnym końy drgania opi
przez śrubę;
by skrzydeł
st również tłunapędowego].
ednostki pływa
orbowego siln
drgań skrętnyńcu linii wałsuje zależnoś
śruby [17].
umikiem drgo jednostek p
ającej
nika można m
57
ych łów ść:
(1)
gań. pły-
mi-

58
Źródło: z
Wdo zrealitłumiki wału kor
Smyśle ok
Fot. 2.tłumika,
Źródło: z
zdjęcie wykona
W większościzowania ze wdrgań skrętnrbowego silnSpośród wiekrętowym są
. Okrętowy tłu2 — pierścień
zdjęcie wykona
Fot. 1
ane przez auto
ci przypadkówzględów konych, które nika. elu rozwiązańą tłumiki wisk
umik wiskotycń bezwładnośc
5 — szcze
ane przez auto
1. Tłumiki drg
ora.
ów pierwsze onstrukcyjno-najczęściej u
ń konstrukcykotyczne (fo
czny o średnicciowy, 3 — łożelina olejowa
ora.
gań skrętnych
trzy rozwiąz-eksploatacyjumieszczane
yjnych najczęot. 2.).
cy 850 mm pożysko promien(olej silikono
Zeszyty
zania mogą bjnych, dlatege są na swo
ęściej stosow
o regeneracji: niowe, 4 — ło
owy)
Wojciech Hom
Naukowe AM
być niemożlio też stosuje
obodnym koń
wanymi w pr
1 — obudoważysko wzdłużn
mik
MW
iwe e się ńcu
rze-
a żne,

Metryka wiskotycznego tłumika drgań skrętnych
1 (192) 2013 59
Pierwsze tego typu tłumiki zastosowano w USA na początku XX wieku w przemyśle okrętowym do tłumienia drgań skrętnych wałów rozrządu w silnikach okrętów podwodnych. Ich celem było zapewnienie równomierności pracy silnika, co w bezpośredni sposób przekładało się na obniżenie zjawisk wibroakustycznych jed-nostki. Pomimo zastosowania, jak na owe czasy, nowatorskiego rozwiązania polega-jącego na szeregowym połączeniu dwóch tłumików wypełnionych cieczami o różnych lepkościach, nie osiągnięto zadowalających rezultatów [1, 6]. Stało się tak głównie dlatego, że oleje silikonowe były produkowane na bazie olejów organicznych i po stosunkowo krótkim użytkowaniu w trudnych warunkach traciły swoje właściwości fizyczne. Renesans tłumiki wiskotyczne przeżyły w latach czterdziestych minionego stulecia, kiedy to firma Dow Corning Corporation wprowadziła na rynek nieorga-niczne oleje silikonowe, które zapewniały odpowiednie parametry fizyczne tłumika. Obecnie do napełniania tłumików wiskotycznych stosuje się stabilizowane oleje silikonowe AK produkowane przez firmę Bayer i Wacker.
CHARAKTERYSTYKI TŁUMIKA WISKOTYCZNEGO
Niezależnie od rozwiązania konstrukcyjnego wszystkie tłumiki drgań skręt-nych montowane na wałach korbowych silników okrętowych w myśl obowiązują-cych przepisów powinny być poddawane okresowym badaniom, co 18 000–25 000 godzin pracy. Okresowa diagnostyka (badania) tłumików może być prowadzona jedynie przez wyspecjalizowany personel firmy produkującej tłumiki lub serwisan-tów posiadających stosowne certyfikaty.
Z praktycznego punktu widzenia każdy producent tłumików drgań skręt-nych powinien mieć opracowane skuteczne metody diagnozowania tłumików drgań skrętnych, umożliwiające stwierdzenie, czy eksploatowany tłumik jest jeszcze efek-tywny. Naturalnym kryterium efektywności tłumika jest kryterium amplitudowe oparte na rzeczywistej charakterystyce amplitudowej tłumionych drgań skrętnych. Wiedząc o tym, każdy z uznanych producentów tłumików opracowuje dla swojego wyrobu (tłumika) „metrykę”, która pozwala nie tylko sprawdzić stan techniczny tłumika, ale także przypadkach odtworzyć jego cechy fizyczne i konstrukcyjne. Me-tryka tłumika wiskotycznego drgań skrętnych powinna zawierać:
— parametry geometryczne tłumika; — wielkości luzów (luzu zewnętrznego, luzu wewnętrznego, luzu bocznego) po-
między pierścieniem bezwładnościowym a obudową;

Wojciech Homik
60 Zeszyty Naukowe AMW
— masowy moment bezwładności pierścienia bezwładnościowego Ip; — masowy moment bezwładności obudowy Iow; — lepkość oleju silikonowego, którym tłumik został napełnionyη; — materiał łożysk; — charakterystyki amplitudowo-częstotliwościowe lub charakterystyki amplitu-
dowe.
Charakterystyki amplitudowo-częstotliwościowe danego typu tłumika spo-rządzane są na specjalnych stanowiskach badawczych, których konstrukcja stanowi tajemnicę firmy. Również Firma DAMPOL, z którą podczas realizacji projektu ba-dawczego nr N N509 547440 autor współpracował, dla każdego z produkowanych tłumików drgań opracowywała jego metrykę, w której umieszczała charakterystyki amplitudowe oraz amplitudowo-częstotliwościowe.
W celu sporządzenia pełnej metryki produkowanego seryjnie przykładowe-go wiskotycznego tłumika drgań do badań przygotowano trzy partie tłumików: tłu-miki dobre, tłumiki zablokowane (odwzorowanie przypadku, w którym doszło do znaczącego wzrostu lepkości oleju lub też mechanicznego połączenia pierścienia z obudową), tłumiki puste (odwzorowanie przypadku, w którym doszło np. do wy-cieku oleju).
Rys. 2. Charakterystyka amplitudowa metodyki pomiaru
Źródło: opracowanie własne. Podczas prowadzenia badań wszystkich tłumików układ pomiarowy stano-
wiska badawczego zliczał liczbę okresów Tt drgań od czasu tn, dla którego amplituda drgań wynosiła an, do czasu t1, gdy wartość amplitudy drgań a1 była równa 0.5 an.

Metryka wiskotycznego tłumika drgań skrętnych
1 (192) 2013 61
Badania wszystkich partii tłumików zostały przeprowadzone na tym samym stanowisku badawczym, w tych samych warunkach termicznych (ta sama tempera-tura otoczenia, ta sama temperatura własna, temperatura nasycenia ok. 70°C) i przy tym samym wymuszeniu (rys. 3–6).
Rys. 3. Charakterystyka amplitudowa drgań swobodnych stanowiska
Źródło: opracowanie własne.
Rys. 4. Charakterystyka amplitudowa drgań tłumionych stanowiska — tłumik dobry
Źródło: opracowanie własne.

Wojciech Homik
62 Zeszyty Naukowe AMW
Rys. 5. Charakterystyka amplitudowa drgań tłumionych stanowiska — tłumik zablokowany
Źródło: opracowanie własne.
Rys. 6. Charakterystyka amplitudowa drgań tłumionych stanowiska — tłumik pusty
Źródło: opracowanie własne.
Otrzymane podczas badań charakterystyki amplitudowe umieszczone wraz z liczbą zliczonych okresów Tt ( 17≈tT — stanowisko, 25≈tT — tłumik dobry,
97≈tT — tłumik zablokowany, 3≈tT — tłumik suchy) w metryce tłumika są cennym źródłem informacji o tłumiku, nawet w przypadku, gdy zaniechano jego produkcji. Umożliwiają one, jak już wspomniano, nie tylko określenie jego stanu technicznego, ale także w sytuacjach szczególnych jego odtworzenie. Opisana przykładowa

Metryka w
1 (192) 2
metryka potliwy
Wpowinnai rzeczysilnika wPrzykładamplitudstanowisw ramac
tłu
Źródło: o
wiskotyczneg
013
jest niewątpsposób możnWarto też wa zawierać sywiste charawraz z tłumikdy takich chadowo-częstotsku i obiekcch realizacji
Rys. 7. Przumików wisk
opracowanie w
go tłumika drg
pliwie przydana dostarczywspomnieć, stanowiskowakterystyki kiem, uzyskaarakterystyk tliwościowe,cie rzeczywiwspomniane
zykładowe chaotycznych o r
własne.
gań skrętnych
atna w przypć do produceże metryka
we charakteryamplitudowane podczaspokazano na
, które autorstym (samocego wniosku
arakterystyki aróżnych lepko
padku tłumikenta.
okrętowegoystyki amplo-częstotliw
s pierwszycha rysunkachr uzyskał podchodzie osob
u badawczeg
amplitudowo-ościach cieczy
ków, które w
o tłumika ditudowo-czę
wościowe wah prób jednos7. i 8. Są to dczas prowabowym mar
go.
-częstotliwoścw temperatur
w prosty, niek
rgań skrętnyęstotliwościoału korbowestki napędowcharakteryst
adzenia próbrki VW Pass
ciowe rze +45oC
63
kło-
ych owe ego
wej. tyki
b na sat)

64
Rys
Źródło: o
Asek bada
[1] Bisin nee
[2] Bryinvspo
[3] Brui Ł
[4] DiSch
[5] Go
s. 8. Przykłado
opracowanie w
Artykuł zostaawczy nr N N
shop R. E. Da propulsio
ers/Transacti
ryndum L., Jvestigation oonse, Maritim
run R., SzybŁączności, W
en R., Schwhiff und Mas
oliński J., Wi
owa rzeczywisł
własne.
ał sfinansowaN509 547440)
D., Price W. Gon system haions 1979, V
Jakobsen S.of propellerme System In
bkobieżne sWarszawa 197
wanecke H.,schine, MTZ
ibroizolacja m
sta charakteryłumika wiskot
any ze środk0).
BIBLIOGR
G., Tam P. Kaving a fluid
Vol. 91, part 5
B., Matosevr damping antegrity, 18–
silniki wysok73.
Die propel, 1973, 11–1
maszyn i urz
ystyka amplitutycznego
ków Narodow
RAFIA
K. Y, On damd drive, The5, p. 6.
vic M., A thand transien–21 Septemb
koprężne, W
llerbedingte 12.
ządzeń, WNT
Zeszyty
udowo-częstot
wego Centru
mping of torse Institute of
heoretical annt torsional er 1990.
Wydawnictwa
Wechselwir
T, Warszawa
Wojciech Hom
Naukowe AM
tliwościowa
m Nauki (wn
sional vibratf Marine En
nd experimenresonance
a Komunika
rkung zwisch
a 1979.
mik
MW
nio-
tion ngi-
ntal re-
acji
hen

Metryka wiskotycznego tłumika drgań skrętnych
1 (192) 2013 65
[6] Homik W., Diagnostyka, serwisowanie i regeneracja tłumików drgań skręt-nych wałów korbowych okrętowych silników spalinowych, ‘Polish Maritime Research’, 2010, No 1.
[7] Jenzer J., Some vibration aspects of modern ship machinery, ‘New Sulzer Die-sel Report’, July 1996, No 23.
[8] Ker Wilson W., ‘Practical Solution of Torsional Vibration Problems’, Vol. I–IV, Chapman & Hall, London 1968.
[9] Maciotta R., Saija Merlino F., Research on damping of torsional vibrations in the Dieselengined propelling plants, ‘FIAT Technical Bulletin’, 1966, 2.
[10] MacPherson D. M., Puleo V. R., Packard M. B., Estimation of Entrained Wa-ter Added Mass Properties for Vibration Analysis, ‘The Society of Naval Ar-chitects & Marine Engineers’, New England Section, June 2007.
[11] Jędrzejowski J., Mechanika układów korbowych silników samochodowych, Wydawnictwa Komunikacji i Łączności, Warszawa 1986.
[12] Selvaggi M., Experimental research on damping due to propellers in torsional vibration of marine propulsion plants, Proceedings of 11th CIMAC Congress, Barcelona, 1975, Vol. 2.
[13] Wajand J. A., Silniki o zapłonie samoczynnym, Wydawnictwa Naukowo- -Techniczne, Warszawa 1988.
[14] Wajand J. A, Wajand J. T., Tłokowe silniki spalinowe średnio- i szybkoobro-towe, Wydawnictwa Naukowo-Techniczne, Warszawa 1993.
[15] Warszak W., Tłokowe sprężarki ziębnicze, Wydawnictwa Naukowo- -Techniczne, Warszawa 1972.
[16] Werner J., Wajand A., Silniki spalinowe małej i średniej mocy, Wydawnictwa Naukowo-Techniczne, Warszawa 1971.
[17] Zygmuntowicz J., Metodyka obliczeń drgań skrętnych — metodyka obliczeń tłumików wiskotycznych drgań skrętnych, Warszawa 2010.

Wojciech Homik
66 Zeszyty Naukowe AMW
C E R T I F I C A T E D E S C R I P T I O N V I S C O U S D A M P E R
T O R S I O N A L V I B R A T I O N S
ABSTRACT
In this paper discussed are the problems concerned with the induction of torsional vibra-tions in the ships drive systems as well as dampingmethods. The main focus of attentions is the indirect method an application of viscotic damper through its ‘certificate description’, which in-cludes the basic construction and physical parameters and amplitude-frequency characteristics.
Keywords: torsional vibrations, viscous damper.

ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1 (192) 2013
67
Józef Lisowski Akademia Morska w Gdyni Wydział Elektryczny, Katedra Automatyki Okrętowej 81-225 Gdynia, ul. Morska 83 e-mail: [email protected]
METODY KOMPUTEROWEGO WSPOMAGANIA D E C Y Z J I M A N E W R O W E J N A W I G A T O R A
W S Y T U A C J A C H K O L I Z Y J N Y C H
STRESZCZENIE
W artykule przedstawiono zastosowanie elementów teorii gier i sztucznej inteligencji do automatyzacji procesu sterowania obiektami ruchomymi na przykładzie bezpiecznego sterowania własnym statkiem w sytuacjach kolizyjnych podczas mijania się ze spotkanymi statkami. Przed-stawiono algorytmy wyznaczania bezpiecznej trajektorii statku wspomagające decyzję manewrową nawigatora w sytuacji kolizyjnej. Rozważania zilustrowano przykładami komputerowej symulacji w oprogramowaniu Matlab/Simulink bezpiecznych trajektorii statku w rzeczywistej sytuacji na morzu.
Słowa kluczowe: nawigacja morska, bezpieczeństwo żeglugi, zapobieganie kolizjom, sterowanie rozgrywające, sterowanie optymalne.
WSTĘP
Do istotnych zagadnień teorii procesów decyzyjnych w nawigacji morskiej należy bezpieczne sterowanie statkiem. Problem bezkolizyjnych strategii w stero-waniu na morzu pojawia się już u Isaacsa [7], zwanego „ojcem gier różniczko-wych”, i rozwijany był przez wielu autorów zarówno w aspekcie teorii gier, jak i sterowania w warunkach niepewności. Chociaż sformułowanie problemu uniknię-cia kolizji wydaje się całkiem oczywiste, to oprócz niepewności informacji, jaka wynikać może zarówno z oddziaływania zakłóceń hydrometeorologicznych, jak też nieprecyzyjnego charakteru reguł Międzynarodowego Prawa Drogi Morskiej (MPDM), istotna jest subiektywność nawigatora w ocenie sytuacji i podejmowanej

Józef Lisowski
68 Zeszyty Naukowe AMW
decyzji manewrowej [1, 2]. Tematyka wyznaczania strategii bezpiecznych jest nadal aktualna ze względu na ciągle rosnący ruch statków na poszczególnych akwenach, a jednocześnie z powodu zwiększających się wymagań bezpieczeństwa żeglugi i ochrony środowiska oraz rosnących możliwości komputerowego wspomagania pracy nawigatorów [3, 4].
MODELE PROCESÓW STEROWANIA RUCHEM STATKU
W celu zapewnienia bezpieczeństwa żeglugi statki zobowiązane są respek-tować reguły MPDM. Jednak te reguły stosują się tylko do dwóch statków w zakre-sie dobrej widzialności, a w warunkach ograniczonej widzialności podają jedynie zalecenia ogólnego charakteru i nie są w stanie uwzględnić wszystkich niezbędnych warunków rzeczywistego procesu [6].
Rzeczywisty proces mijania się statków często zachodzi więc w warunkach nieokreśloności i konfliktu, przy nieścisłym współdziałaniu statków w myśl reguł MPDM. Dlatego celowe jest przedstawienie procesu oraz opracowanie i badanie dla celów praktycznych metod bezpiecznego sterowania statkiem z zastosowaniem ele-mentów teorii gier. Konieczność jednoczesnego uwzględnienia strategii spotkanych statków oraz ich własności dynamicznych jako obiektów sterowania przesądza o zastosowaniu do opisu procesu modelu gry różniczkowej, często nazywanej przez inżynierów grą dynamiczną [5, 13, 14].
Ruch dynamiczny statków w czasie odbywa się pod wpływem wielkości ste-rujących u z odpowiednich dopuszczalnych zbiorów sterowania U:
[ ])()( , σσjw UUU , (1)
gdzie: )(σ
wU — zbiór strategii własnego statku; )(σ
jU — zbiór strategii j spotkanego statku;
0=σ — oznacza symbolicznie stabilizację kursu lub trajektorii; 1=σ — oznacza symbolicznie realizację manewru antykolizyjnego w celu minima-
lizacji ryzyka kolizji, co w praktyce osiąga się spełnieniem następującej nierówności (rys. 1.):
bjj DtDD ≥= )(minmin , (2)

Metody k
1 (192) 2
gdzie: jDmin —
Dj —Db —
1−=σ —
Źródło: o
Wnia ruche
1) sterowa) sta
2) gry jea) un
•
•
•
b) sp
komputeroweg
013
— najmniejs— aktualna o— bezpieczn
widzialno— oznacza
mniejszejtowniczegnieprzyja
Rys. 1. Sy
opracowanie w
W przyjętej em statków:
wanie optymabilizacja ku
ednostronne nikanie kolizj
manewrów
manewrów
manewrów
potkanie statk
go wspomagan
sza odległośćodległość dona odległośćości na morzusymboliczni odległości go, przekazyaciela itp.
ytuacja mijania
własne.
symbolice za
malne ursu lub trajek
zji za pomocąw własnego st
w spotkanego
w kooperujący
ków [ 1−w UUU
nia decyzji ma
ć zbliżenia wo j statku; ć zbliżenia wu, reguł MPDie manewrowzbliżenia, nawania ładunk
a się własnego
apisu można
ktorii [ 0wUU
ą: tatku [ 1
wUUU
j statku [UU
ych [ 11jwUUU
]1−jU ;
manewrowej na
własnego stat
w danych waDM oraz właswanie statkiea przykład pku ze statku
o statku z j spo
a wyróżnić n
]0jU ;
]0jU ,
]10jwUU ,
]1j ;
awigatora…
ku i j spotka
arunkach zalesności dynamem w celu opodczas zbliżna statek, ni
otkanymi statk
następujące ro
nego statku;
eżna od stopmicznych statosiągnięcia nżenia statku iszczenia okr
kami
odzaje sterow
69
pnia tku; naj-ra-
rętu
wa-

70
3) gry koa) sy
(na prjednąsystem
b) sy
UOGÓ
Nobiektam
Rys.
Źródło: o W
..,2,1=i
gdzie:
( )00 ϑϑ −txr
( )j tx j ϑϑ −r
onfliktowe ytuacje jedno
rzykład niebeą ze stron przym antykolizyj
ytuacje pości
ÓLNIONY M
Najbardziej ami jest model
2. Schemat uo
opracowanie w
Własności pr
xi =&
( )0.., ϑϑ +⋅ jj
0ϑ — wymiar
jϑ — wymiar
ostronnej gry
ezpieczna syty braku obser
yjny, drugi z u
igu [ 11jw UUU −
MODEL PRW SYTUA
adekwatnyml gry dynami
ogólnionego m
własne.
rocesu opisa
,..,[( 1010 xxfiϑϑ
) , j = 1, 2, …
rowy wektor
rowy wektor
dynamiczne
tuacja wynikłrwacji drugiejuszkodzonym
] oraz [ 1wUU
ROCESU STACJACH K
m modelem pricznej j uczes
modelu gry dy
ne są przez r
),,...,., xx mj
mjϑϑ
…, m,
r stanu własn
r stanu j-tego
ej [ ]01jw UUU −
ła z błędnej oej — jeden stam radarem lub
]1−jwU .
TEROWANKOLIZYJNY
rocesu mijanstników (rys
ynamicznej pr
równanie sta
,...,,(, 1010 uuu vv
nego statku;
o obiektu;
Zeszyty
oraz [ 0wUUU
oceny procesuatek wyposażb bez tego wy
NIA RUCHEYCH
nia się statkus. 2.).
rocesu sterowa
anu:
]),,..., tuu mj
mvj
ν
Józef Lisow
Naukowe AM
]1−jU
u zbliżenia prżony w radar yposażenia);
EM STATK
z j spotkany
ania statkiem
}
wski
MW
rzez lub
KU
ymi
(3)

Metody komputerowego wspomagania decyzji manewrowej nawigatora…
1 (192) 2013 71
( ) 00 νν −tuo
r — wymiarowy wektor sterowania własnego statku;
jj tu j νν −)(r — wymiarowy wektor sterowania j-tego obiektu [9, 12].
Ograniczenia stanu i sterowania wynikają z zachowania bezpiecznej odle-głości mijania Db z zachowaniem reguł manewrowania MPDM:
0≤)u,x(g jjjjjνϑ . (4)
Synteza sterowania rozgrywającego statkiem polega na minimalizacji kryte-rium jakości sterowania danego w postaci całkowej i końcowej:
[ ] ( ) min)()(0
02
00 →++= ∫ k
t
tkj
j tdtrdttxIk
ϑ . (5)
Wypłata całkowa przedstawia straty drogi statku na wymijanie spotkanych obiektów, a wypłata końcowa określa końcowe ryzyko kolizji do j-tego obiektu i końcowe odchylenie trajektorii własnego statku od zadanej trasy rejsu.
METODY WSPOMAGANIA DECYZJI MANEWROWEJ NAWIGATORA
Uwzględniając dużą złożoność modelu gry dynamicznej, do praktycznej syntezy programów sterowania formułuje się modele uproszczone, z jednoczesnym zastosowaniem wybranych metod sztucznej inteligencji [8]. Poszczególnym mode-lom procesu można przyporządkować odpowiednie algorytmy komputerowego wspomagania decyzji manewrowej nawigatora w sytuacjach kolizyjnych (tab. 1.).
Tabela 1. Metody komputerowego wspomagania decyzji manewrowej nawigatora w sytuacji kolizyjnej na morzu
Program wspomagania decyzji manewrowej
Model procesu sterowania
Metoda syntezy sterowania
Rodzaj decyzji manewrowej
AWDM_gpnk gra pozycyjna niekooperacyjna
programowanie liniowe dualne
trajektoria rozgrywająca
AWDM_gmnk gra macierzowa niekooperacyjna
programowanie liniowe dualne
trajektoria rozgrywająca
AWDM_gpk gra pozycyjna kooperacyjna
programowanie liniowe dualne
trajektoria rozgrywająca
AWDM_odyn optymalizacja dynamiczna
programowanie dynamiczne sztuczna
sieć neuronowa
trajektoria optymalna
AWDM_okin optymalizacja kinematyczna
programowanie liniowe
trajektoria optymalna
Źródło: opracowanie własne.

72
A
Dmodel gków niekśla się, wwłasnegokażdego cyjną wł
Fsnego stwyboru kursu i pspotkanynieniem
Rys. 3. statkam
Źródło: o
A l g o r y t m
Do syntezy bgry dynamiczkooperującywyznaczając o statku ora ze spotkanyłasnego statk
Funkcję celutatku do najboptymalnej prędkości za
ych statków, dynamiki wł
Bezpieczna trmi, w ogranicz
AWDM_
opracowanie w
m A W D M _
bezpiecznegznej, uproszcch ze sobą [zbiory dopu
az zbiory doych statków.ku z warunku
* mIu
=
u sterowaniabliższego putrajektorii wapewniającyw odległoścłasnego statk
rajektoria włazonej widzialn
M_gpnk, wypła
własne.
_ g p n k
o sterowaniaczony do wi10]. Optymauszczalnych opuszczalnyc Następnie w
u:
minmaxin00
Iuu j
j
a własnego sunktu zwrotuwłasnego stat
ch najmniejsi nie mniejsz
ku w postaci c
asnego statku wności na morzuta końcowa gr
a statkiem wieloetapowejalne sterowanstrategii spo
ch strategii wwyznacza się
0 ],[ SLxI k =
statku S0 chau Lk na zadatku sprowadzsze straty drzej niż założoczasu wyprze
w sytuacji mijzu Db = 2 Mm,ry: r(tk) = 0, d
Zeszyty
wykorzystuje gry pozycynie własnym
otkanych statwłasnego staę optymalną
*0S .
arakteryzuje anej trasie reza się do wyrogi na bezpona wartość edzenia mane
jania się z j =, wyznaczona d(tk) = 4.11 M
Józef Lisow
Naukowe AM
się uogólnioyjnej j uczestm statkiem oktków względatku względstrategię po
odległość wejsu. Kryteriyznaczenia jepieczne mijaDb, z uwzgl
ewru (rys. 3.)
19 spotkanymprzez program
Mm
wski
MW
ony tni-kre-dem dem ozy-
(6)
wła-ium ego anie lęd-).
mi m

Metody k
1 (192) 2
A
Pprocesu niekoope
Wstatków)bór stratw zakreszania teW zagadgracz II rozkład pcie dla k
otrzymujtych. Roprawdop
Rys. 4. statkam
Źródło: o
komputeroweg
013
A l g o r y t m
Pomijając rózapobiegani
erujących zeW grze mac) mają do dytegii wynikajsie jej rozwi
ego problemdnieniu dualdo maksym
prawdopodokryterium ster
uje się macieozwiązaniempodobieństwi
Bezpieczna trmi, w ogranicz
AWDM_
opracowanie w
go wspomagan
m A W D M _
ównania dynia kolizjom
e sobą [11]. cierzowej gryspozycji pewają z reguł Mązania poprz
mu można polnym gracz
malizacji ryzyobieństwa użrowania w p
erz prawdopom zadania bez
ie (rys. 4.).
rajektoria włazonej widzialn_gmnk, wypła
własne.
nia decyzji ma
_ g m n k
namiki statkusprowadza
acz I (własnwną liczbę s
MPDM. Najczez zastosowosłużyć się I dąży do myka kolizji. ycia przez gostaci:
uI mmin
0
=∗
odobieństwazpiecznego s
asnego statku wności na morzuata końcowa g
manewrowej na
u, podstawowsię do gry m
ny statek) orstrategii czysczęściej gra
wanie strategidualnym pr
minimalizacjSkładowe st
graczy ich str
jur
j
max
a użycia possterowania je
w sytuacji mijzu Db = 2 Mm,gry: r(tk) = 0, d
awigatora…
wy model grmacierzowej
raz gracze IIstych. Ogrannie ma punkii czystych. Wrogramowanji ryzyka kotrategii miesrategii czysty
zczególnychest strategia
jania się z j =, wyznaczona d(tk) = 4.36 M
ry dynamicz j uczestnik
I (j spotkanyniczenia na wktu siodłoweW celu rozw
niem liniowyolizji, natomiszanej wyrażych. W rezu
h strategii czo największ
19 spotkanymprzez program
Mm
73
znej ków
ych wy-ego
wią-ym. iast żają ulta-
(7)
zys-zym
mi m

74
A
Kpostać (r
Rys. 5. statkam
Źródło: o
A
Kruchome
Dprzez sztczoną prARPA (r
A l g o r y t m
Kryterium jarys. 5.):
Bezpieczna trmi, w ogranicz
AWDM
opracowanie w
A l g o r y t m
Kryterium bej domeny pr
Domena w ptuczną sieć nrzez większąrys. 6.).
m A W D M _
akości sterow
* mIu
=
rajektoria włazonej widzialn
M_gpk, wypłat
własne.
m A W D M _
bezpiecznegorzyporządkow
postaci kołaneuronową Ną grupę dośw
_ g p k
wania (6) dla
minminin00
Iuu j
j
asnego statku wności na morzuta końcowa gr
_ o d y n
o sterowania wanej spotka
),( txg jj
a, sześciokątNeural Netwowiadczonych
pozycyjnej g
0 ],[ SLxI k =
w sytuacji mijzu Db = 2 Mm,ry: r(tk) = 0, d
jest spełnieanemu statko
0≤ .
ta, elipsy lubork Toolbox
h nawigatoró
Zeszyty
gry kooperac
*0S .
jania się z j =, wyznaczona
d(tk) = 3.63 Mm
enie ograniczowi:
b paraboli jex MATLAB, ów, na przyk
Józef Lisow
Naukowe AM
yjnej przyjm
19 spotkanymprzez program
m
zenia w post
est generowawcześniej n
kład na kursa
wski
MW
muje
(8)
mi m
taci
(9)
ana nau-ach

Metody k
1 (192) 2
Srowania wymijansterowan
Rys. 6. statkam
Źródło: o
A
Kmatyczn
komputeroweg
013
Stosując prosprowadza
nie spotkanynia czasoopty
Bezpieczna trmi, w ogranicz
AW
opracowanie w
A l g o r y t m
Kryterium janej przyjmuje
go wspomagan
gramowaniesię do zape
ych statków, ymalnego:
*I
rajektoria włazonej widzialn
WDM_odyn, wa
własne.
m A W D M _
akości sterowe postać (rys.
*I
nia decyzji ma
dynamiczneewnienia naj
co przy sta
00
≅= ∫∫kk tt
dVdtV
asnego statku wności na morzuartość końcow
_ o k i n
wania (6) dl. 7.):
0* ,[min
0
xIu
=
manewrowej na
e Bellmana, ajmniejszych ałej prędkoś
min→dt .
w sytuacji mijzu Db = 2 Mm,wa kryterium:
la nierozgryw
*0] SLk = .
awigatora…
kryterium opstrat drogi
ci ruchu spr
jania się z j =, wyznaczona
htK 67.1=∗
wającej opty
ptymalnego sna bezpiecz
rowadza się
(
19 spotkanymprzez program
ymalizacji ki
(
75
ste-zne do
(10)
mi m
ine-
(11)

76
Rys. 7. statkam
Źródło: o
Rys. 8. Poprogram
Źródło: o
Bezpieczna trmi, w ogranicz
AWDopracowanie w
orównanie bezmy komputero
opracowanie w
rajektoria włazonej widzialn
DM_odyn, wartwłasne.
zpiecznych trajowego wspoma
własne.
asnego statku wności na morzutość końcowa
jektorii własneagania decyzji
spotkanych s
w sytuacji mijzu Db = 2 Mm,a kryterium: d(
ego statku wyzi manewrowejstatków
Zeszyty
jania się z j =, wyznaczona (tk)=3.25 Mm
znaczonych pr nawigatora w
Józef Lisow
Naukowe AM
19 spotkanymprzez program
rzez poszczegów sytuacji j = 1
wski
MW
mi m
ólne 19

Metody komputerowego wspomagania decyzji manewrowej nawigatora…
1 (192) 2013 77
WNIOSKI
Zastosowanie uproszczonych modeli gry dynamicznej procesu do syntezy komputerowych programów wspomagania umożliwia wyznaczenie bezpiecznej trajektorii optymalnej i rozgrywającej statku w sytuacjach mijania się z większą liczbą spotkanych statków jako pewnej sekwencji manewrów kursem i prędkością.
Opracowane programy komputerowe uwzględniają reguły MPDM i czas wyprzedzenia manewru, aproksymujący własności dynamiczne własnego statku, a także oceniają odchylenie końcowe trajektorii rzeczywistej od zadanej.
Przedstawione programy komputerowe są formalnymi modelami procesów decyzyjnych nawigatora prowadzącego statek i mogą być zastosowane w systemie komputerowego wspomagania nawigatora przy podejmowaniu decyzji manewrowej w sytuacjach kolizyjnych.
BIBLIOGRAFIA
[1] Bist D. S., Safety and security at sea, Butter Heinemann, Oxford-New Delhi 2000.
[2] Bole A., Dineley B., Wall A., Radar and ARPA manual, Elsevier, Amsterdam — Tokyo 2006.
[3] Cahill R. A., Collisions and thair causes, The Nautical Institute, London 2002.
[4] Cockcroft A. N., Lameijer J. N. F., The collision avoidance rules, Elsevier, Amsterdam — Tokyo 2002.
[5] Engwerda J. C., LQ dynamic optimization and differential games, John Wiley & Sons, West Sussex 2005.
[6] Gluver H., Olsen D., Ship collision analysis, A. A. Balkema, Rotterdam — Brookfield 1998.
[7] Isaacs R., Differential games, John Wiley & Sons, New York 1965.
[8] Lisowski J., Algorytmy komputerowego wspomagania nawigatora w sytua-cjach kolizyjnych, „Przegląd Telekomunikacyjny i Wiadomości Telekomuni-kacyjne”, 2011, nr 7, s. 671–673.
[9] Lisowski J., The multistage positional game of marine objects with different degree of cooperation, ‘Solid State Phenomena’, 2012, Vol. 180, pp. 56–63.

Józef Lisowski
78 Zeszyty Naukowe AMW
[10] Millington I., Funge J., Artificial intelligence for games, Elsevier, Amsterdam — Tokyo 2009.
[11] Modarres M., Risk analysis in engineering, Taylor & Francis Group, Boca Raton 2006.
[12] Nisan N., Roughgarden T., Tardos E., Vazirani V. V., Algorithmic game theory, Cambridge University Press, New York 2007.
[13] Osborne M. J., An introduction to game theory, Oxford University Press, New York 2004.
[14] Straffin P. D., Teoria gier, Wydawnictwo Naukowe Scholar, Warszawa 2001.
C O M P U T E R S U P P O R T M E T H O D S O F N A V I G A T O R M A N O E U V R I N G D E C I S I O N
I N C O L L I S I O N S S I T U A T I O N S
ABSTRACT
The paper introduces the application of selected methods of game theory and artificial intelligence for automation of the control process of moving objects on the example of safe ship steering in a collision situation. For each approximated model of the dynamic game, an appropriate method of safe steering to support the navigator decision in a collision situation has been assigned. The considerations have been illustrated an example of a computer simulation in Matlab/Simulink of several methods to determine the safe ship’s trajectory in situations of passing many of the objects encountered, recorded on the ship’s radar screen in real navigational situation at sea.
Keywords: marine navigation, safety of navigation, collision avoidance, control unfolding, optimal control.

ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1 (192) 2013
79
Tomasz Lus Akademia Marynarki Wojennej Wydział Mechaniczno-Elektryczny, Instytut Budowy i Eksploatacji Okrętów 81-103 Gdynia, ul. J. Śmidowicza 69 e-mail: [email protected]
W S TĘP N E B A D A N I A D I A G N O S T Y C Z N E S Z Y B K O O B R O T O W Y C H S I L N I K Ó W
O Z A PŁO N I E S A M O C Z Y N N Y M N A O K RĘC I E P O D W O D N Y M Z W Y K O R Z Y S T A N I E M
M E T O D Y O B W I E D N I D R G AŃ
STRESZCZENIE
W artykule zostały przedstawione wyniki wstępnych badań diagnostycznych okrętowych tłokowych silników spalinowych typu MB820 stosowanych na okrętach podwodnych (OP) Polskiej Marynarki Wojennej z wykorzystaniem nowej metody bazującej na kątowej analizie obwiedni przyspieszeń drgań. Silniki tego typu nie są wyposażone w zawory indykatorowe, zatem w celu oceny stanu technicznego układów cylindrowych można wykorzystać przebiegi drgań rejestrowane na głowicach cylindrów. W czasie badań czujniki ciśnienia wewnątrzcylindrowego były zamontowane na zaworach dekompresyjnych. Przebiegi ciśnienia były wykorzystywane jako sygnały referencyjne do synchronizacji przebiegów drgań. Wynikiem badań są tzw. dynamiczne fazy rozrządu, wyko-rzystywane przez specjalistów przy ocenie stanu technicznego i regulacji poszczególnych cylin-drów silnika.
Słowa kluczowe: okrętowe tłokowe silniki spalinowe, diagnostyka, układ paliwowy, układ rozrządu.
WSTĘP
Nowa metoda diagnostyczna była testowana na szybkoobrotowym siniku okrę-towym MB820 na OP typu Kobben. Typowe wibroakustyczne metody diagnostyczne

Tomasz Lus
80 Zeszyty Naukowe AMW
bazujące na analizie amplitudowej lub analizie częstotliwości sygnału drganiowe-go [1, 5] są wrażliwe na zmiany prędkości obrotowej i obciążenia silnika. Nowa metoda diagnostyczna [4] bazuje na analizie obwiedni sygnału drganiowego w dzie-dzinie kąta obrotu wału korbowego silnika. Tak zwane „dynamiczne” fazy rozrządu są niezbędne do oceny stanu regulacji silnika. Konwencjonalne metody obsługi i regulacji mechanizmu rozrządu silnika bazują na pomiarach luzów zaworowych oraz kontroli faz rozrządu na kole zamachowym niepracującego silnika. Aby doko-nać oceny wartości luzów zaworowych i faz rozrządu na pracującym silniku, trzeba dysponować „dynamicznymi” fazami rozrządu. Wybrane wartości tych parametrów dla silników MB820 przedstawiono w artykule. Polska Marynarka Wojenna eksploa-tuje cztery OP typu Kobben. Na każdym z nich znajdują się dwa silniki MB820, które napędzają generatory prądu stałego. Metody wibroakustyczne mogą być przydatne w diagnozowaniu właśnie takich złożonych systemów napędowych. Przedstawiono wybrane problemy związane z diagnozowaniem szybkoobrotowego silnika spalino-wego na OP z wykorzystaniem metody wibroakustycznej.
OBIEKT BADAŃ — SILNIK MB820/N1
Silnik MB820 jest dwunastocylindrowym czterosuwowym szybkoobroto-wym niedoładowanym silnikiem okrętowym w układzie „V”, w dwóch blokach po sześć cylindrów, o kącie rozchylenia pomiędzy blokami wynoszącym 60 stopni kąto-wych, zwartej i lekkiej budowie [6], którego komora spalania cechuje się występowa-niem dodatkowej komory wstępnej. Strona silnika od koła zamachowego jest oznaczana jako tylna. Określenia kierunku obrotów wału korbowego silnika dokonu-je się, patrząc na silnik od tylnego końca wału. Gdy wał obraca się zgodnie z ruchem wskazówek zegara, silnik ma „prawy” kierunek obrotów. Numeracja cylindrów w blokach również jest prowadzona od tylnego końca wału. Pierwszy i siódmy cy-linder znajdują się przy kole zamachowym silnika, a silnik ma tzw. „lewy” kierunek obrotów. Każdy cylinder ma dwa zawory dolotowe i dwa zawory wylotowe napę-dzane wspólnym wałkiem krzywkowym poprzez popychacze, drążki popychaczy i dźwignie zaworowe. Dwa kolektory wylotowe są połączone z tłumikiem hałasu. Wszystkie pompy niezbędne do pracy silnika — podająca paliwo, olejowa i wody chłodzącej — są zamontowane na silniku i napędzane przez przekładnie zębate lub pasami klinowymi od jego wału korbowego. Silnik ma dwie pompy wtryskowe

Wstępne badania diagnostyczne szybkoobrotowych silników o zapłonie samoczynnym…
1 (192) 2013 81
paliwa oddzielne dla poszczególnych bloków. Na pompie lewego bloku zamonto-wany jest regulator prędkości obrotowej. Pompa wtryskowa prawego bloku ma za-montowaną pompę podającą paliwa napędzaną jedną z krzywek na wałku pompy oraz pompę ręczną podawania paliwa. Tuleje cylindrowe typu mokrego zamocowa-ne w bloku są zamknięte od góry oddzielnymi głowicami mocowanymi do bloku silnika ośmioma śrubami ściągowymi. Każda z głowic cylindrów ma wytoczenie do mocowania za pomocą gwintu komory wstępnej wraz z palnikiem. Powyżej komory wstępnej są umieszczone kanały wody chłodzącej uszczelnione od przestrzeni ole-jowej azbestową uszczelką. Podstawowe dane techniczne silnika i parametry regula-cji układu rozrządu są przedstawione w tabeli 1.
Tabela 1. Podstawowe dane techniczne i fazy rozrządu silnika MB820/N1
Cykl pracy czterosuwowy niedoładowany Liczba i układ cylindrów 12 w układzie „V” Średnica cylindra/skok tłoka 175 mm/205 mm Całkowita objętość skokowa 59,2 dm3
System spalania Diesel z komorą wstępną Stopień sprężania 18,5 Prędkość obrotowa mocy znamionowej/ biegu luzem
1400 min-1/600 min-1
Moc znamionowa ciągła przy 1400 obr/min 440 kW Kolejność zapłonów 1-8-5-10-3-7-6-11-2-9-4-12 Luz zaworu dolotowego/wylotowego w stanie zimnym
0,40/0,45 mm
Ciśnienie otwarcia wtryskiwacza 17,0–17,5 MPa
Masa suchego silnika 3710 kg Otwarcie zaworu dolotowego 14o przed GMP
Zamknięcie zaworu dolotowego 56o za DMP
Otwarcie zawory wylotowego 48o przed DMP
Zamknięcie zaworu wylotowego 19o za GMP
Przykrycie zaworów 33o 14o + 19o
Początek wtrysku paliwa na biegu luzem 24o przed GMP
Zakres zmian automatycznej zmiany kąta wtrysku paliwa 24o–36o przed GMP
Źródło: opracowanie własne.

Tomasz Lus
82 Zeszyty Naukowe AMW
WYKORZYSTANIE PRZEBIEGÓW CIŚNIENIA WEWNĄTRZCYLINDROWEGO JAKO SYGNAŁU REFERENCYJNEGO
W celu oceny wartości ciśnień wewnątrzcylindrowych okrętowych silników wolno- i średnioobrotowych wyposaża się je w zawory indykatorowe na poszczegól-nych głowicach cylindrowych. Większość szybkoobrtowych silników okrętowych (łącznie z silnikiem typu MB820), podobnie jak większość silników trakcyjnych, nie jest wyposażona w zawory indykatorowe. W celu pomiaru ciśnienia wewnątrzcylin-drowego w silniku MB820 wykorzystano zawory dekompresyjne. W miejsce zawo-rów dekompresyjnych cylindrów zainstalowano czujniki ciśnienia firmy KISTLER typu 7613B (rys. 1.).
Rys. 1. Głowica cylindra z czujnikiem drgań (1) i ciśnienia cylindrowego (2)
mocowanego w miejsce zaworu dekompresyjnego
Źródło: opracowanie własne.
Takie rozwiązanie mogło być zastosowane tylko na dwóch z dwunastu cy-lindrów silnika w układzie „V” (na cylindrze nr 1 lewego bloku silnika i na cylin-drze nr 7 prawego bloku silnika) ze względu na utrudniony dostęp do pozostałych zaworów dekompresyjnych. Czujnik ciśnienia nie powinien być montowany na stałe w miejsce zaworu dekompresyjnego ze względu na niebezpieczeństwo uszkodzenia silnika, szczególnie w czasie rozruchu. Wybrany fragment zarejestrowanych w cza-sie badań przebiegów ciśnienia był wykorzystywany jako sygnał referencyjny (wy-zwalający) do synchronizacji zapisu przebiegów drgań z poszczególnych sześciu cylindrów w każdym z dwóch bloków silnika. Czujniki drgań były montowane na kolektorze dolotowym powietrza przy każdej z głowic cylindrowych, jak to pokaza-no na rysunku 1.

Wstępne badania diagnostyczne szybkoobrotowych silników o zapłonie samoczynnym…
1 (192) 2013 83
WYNIKI BADAŃ
Typowe metody wizualnej analizy sygnału drganiowego w dziedzinie cza-su/kąta obrotu wału dają zwykle ograniczoną ilość informacji. Metoda prezentowana w artykule polega na analizie, w zależności od kąta obrotu wału korbowego, obwiedni sygnału przyspieszeń drgań generowanych przez układy funkcjonalne pracującego silnika. Została ona opracowana w Akademii Marynarki Wojennej dla silników wolno-, średnio- i szybkoobrotowych i jest ciągle rozwijana dla nowych typów sil-ników okrętowych. Sygnał w tej metodzie jest analizowany jedynie jako zdarzenie na osi czasu/kąta obrotu wału korbowego. Przy dostatecznie wysokiej częstości próbkowania oraz stabilnej osi czasu/kąta, mając właściwy sygnał referencyjny, można stosunkowo łatwo wyznaczyć charakterystyczne dla pracującego silnika punkty z przebiegu obwiedni przyspieszeń drgań. Właściwa kolejność występowa-nia odpowiednich sygnałów drganiowych (właściwy charakter przebiegu sygnału drganiowego) oznacza, że silnik jest w dobrym stanie technicznym. W przypadku silników wielocylindrowych, gdy trzeba analizować jednocześnie wiele nakładają-cych się na siebie sygnałów drganiowych, mogą wystąpić problemy z interpretacją wyników badań. Sygnały drganiowe zarejestrowane jednocześnie na głowicach sze-ściu cylindrów jednego z bloków dwunastocylindrowego silnika MB820 zostały przesunięte (dosunięte) do GMP pierwszego cylindra w danym bloku w celu uła-twienia i zwiększenia dokładności dalszej ich analizy. Jako znacznik GMP został wykorzystany fragment przebiegu ciśnienia wewnątrzcylindrowego.
W przypadku dosunięcia przebiegów drgań do GMP pierwszego cylindra w danym bloku, wzór przebiegu drgań daje operatorowi analizatora możliwość roz-poznania charakterystycznych punków na wykresie faz rozrządu. Dla siników MB820 istnieje możliwość odczytywania określonych kątów odpowiadających występowa-niu impulsów drganiowych również na biegu jałowym sinika, co jest zaskakującą i bardzo cenną informacją uzyskaną w czasie badań wstępnych.
Używając analizatora przebiegów drgań, który jest wyposażony w specjalną funkcję „zoom” (co zostało przedstawione na rys. 3.), każdą część przebiegu można powiększyć i odczytać parametry dynamicznych faz rozrządu silnika.

Tomasz Lus
84 Zeszyty Naukowe AMW
Rys. 2. Przebiegi drgań z sześciu głowic cylindrów tego samego bloku silnika MB820
przesunięte (dosunięte) do GMP pierwszego cylindra w bloku — silnik obciążony nominalnie. Pionowe linie oznaczają odpowiednio wartości kątów: ZZw — statycznego zamknięcia
zaworów wylotowych, ZZd — statycznego zamknięcia zaworów dolotowych, PW — statycznego początku wtrysku paliwa, OZw — statycznego otwarcia zaworów
wylotowych, OZd — statycznego otwarcia zaworów dolotowych
Źródło: opracowanie własne.
Używając kursora, operator analizatora może określić kąty początku otwar-cia wtryskiwaczy paliwa oraz kąty zamknięcia i otwarcia zaworów dolotowych i wylotowych danego cylindra w danym bloku sinika z wystarczającą do regulacji (czy sprawdzenia stanu regulacji) dokładnością.
Wybrane wyniki badań silnika MB820 z użyciem tej metody są przedsta-wione na rysunku 3. i w tabeli 2. Z lewej strony rysunku przedstawiono powiększo-ne (za pomocą funkcji „zoom”) fragmenty przebiegów obwiedni przyspieszeń drgań w charakterystycznych punktach obiegu. Z prawej strony rysunku przedstawiono „dynamiczny” (białe puste kropki) i „statyczny” (czarne pełne kropki) kołowy wy-kres faz rozrządu silnika. Przedstawiono również różnice pomiędzy wartościami „statycznych” i „dynamicznych” faz rozrządu. Zmierzone wartości kątów „dynamicz-nych” faz rozrządu i różnice pomiędzy wartościami średnimi dla lewego (cyl. 1–6) i prawego bloku (cyl. 7–12) silnika obciążonego i na biegu jałowym przedstawiono w tabeli 2.

Wstępne badania diagnostyczne szybkoobrotowych silników o zapłonie samoczynnym…
1 (192) 2013 85
Rys. 3. Dynamiczne i statyczne wartości kątów początku wtrysku paliwa
w silniku MB820 Źródło: opracowanie własne.
Tabela 2. Wartości średnie kątów „dynamicznych” faz rozrządu dla lewego (1–6 cyl.)
i prawego (7–12 cyl.) bloku silnika MB820 obciążonego i na biegu jałowym
Wartość średnia/blok
Obciążenie znamionowe silnika Bieg jałowy ZZw [˚] ZZd [˚] Pw [˚] OZd [˚] ZZw [˚] ZZd [˚] Pw [˚]
średnia 1–6 –343,5 –138,5 –1,5 308,2 –349,6 –139,0 0,6 średnia 7–12 –344,9 –139,7 –5,0 304,1 –345,9 –133,8 –0,7
Źródło: opracowanie własne.

Tomasz Lus
86 Zeszyty Naukowe AMW
WNIOSKI
Ocena stanu technicznego silników spalinowych jest bardzo złożonym pro-cesem. Większość uszkodzeń i zakłóceń w pracy silników jest generowana przez układ paliwowy i układ rozrządu czynnika roboczego. Zgodnie z instrukcjami, ob-sługa jest zobowiązana do stosunkowo częstego kontrolowania stanu technicznego tych i innych układów silnika.
Otwieranie i zamykanie się wtryskiwaczy paliwa, otwieranie i zamykanie się zaworów dolotowych i wylotowych silnika jest źródłem sygnałów drganiowych, których propagacja następuje w całej strukturze silnika. Istnieje szereg narzędzi pozwalających analizować zmiany charakteru przebiegów sygnałów drganiowych w systemach monitoringu stanu technicznego urządzeń w czasie rzeczywistym. Za-prezentowana specjalna metoda obróbki sygnałów drganiowych daje możliwość zmiany sposobu dokonywania obsług profilaktycznych silników [2, 3] z dotychczas stosowanej metody według liczby przepracowanych godzin na metodę według stanu technicznego, bez obawy o uszkodzenie pracującego silnika. Tak zwane „dynamiczne” fazy rozrządu można zarejestrować, stosując odpowiednią obróbkę sygnału. Zareje-strowane dynamiczne kąty faz rozrządu różnią się od tzw. kątów „statycznych” faz rozrządu podawanych w instrukcji obsługi silnika. Kąty określane statycznie nie mogą być przydatne w obsługach profilaktycznych z wykorzystaniem analizatora pracy silnika. Wynika z tego konieczność tworzenia bazy danych dynamicznych wartości faz rozrządu. Na wartości kątów dynamicznych faz rozrządu silników wpływa prędkość obrotowa i obciążenie silnika. Biorąc pod uwagę fakt, że badania silnika mogą się odbywać w różnych warunkach obciążenia, konieczne jest posiada-nie zarejestrowanych parametrów dla szerokiego spektrum obciążeń silnika.
W trakcie badań wstępnych nie zarejestrowano wszystkich charakterystycz-nych punktów kołowego wykresu rozrządu. Nie uzyskano z dostateczną dokładno-ścią dynamicznych kątów otwarcia zaworów wylotowych. Prawdopodobnie było to spowodowane faktem, że zawory wylotowe znajdują się blisko osi symetrii silnika, a czujniki drgań były montowane na zewnątrz silnika na kolektorze dolotowym po-wietrza. Dodatkowo nie zarejestrowano sygnałów drganiowych od zamknięcia wtry-skiwaczy, gdyż sygnał od ich otwarcia przy stosowanym sposobie filtracji zanika dłużej, niż trwa okres wtrysku. Aby uzyskać lepsze wyniki badań, wydaje się, że czujniki drgań powinny być montowane do silnika na wkręty lub przyklejane — mocowanie magnetyczne czy dociskanie czujnika ręką nie pozwala uzyskać pełnego spektrum drgań (1–3) kHz. Ponadto w trakcie badań stwierdzono, że czujnik drgań powinien mieć wyższą częstotliwość drgań własnych. Filtr górnoprzepustowy powi-nien mieć zmieniony zakres, a filtr obwiedniowy zmienioną stałą czasową.

Wstępne badania diagnostyczne szybkoobrotowych silników o zapłonie samoczynnym…
1 (192) 2013 87
BIBLIOGRAFIA
[1] Batko W., Dąbrowski Z., Nowoczesne metody badania procesów wibroaku-stycznych, Wydawnictwo i Zakład Poligrafii Instytutu Technologii Eksploata-cji — PIB, Radom 2006.
[2] Bengtsson M., Condition Based Maintenance System Technology — Where is Development Heading?, Euromaintenance 2004 — Proceedings of the 17th European Maintenance Congress, 11th — 13th of May, 2004, AMS (Spanish Maintenance Society), Barcelona 2004.
[3] Klockars T., Eykerman A., Mayr I., Making the most of perfect maintenance timing, ‘Wärtsilä Technical Journal’, 01.2010, pp. 57–60.
[4] Lus T., Tunnig method for high-speed marine Diesel engine MB820 type, ‘Journal of Kones Powertrain and Transport’, 2010, Vol. 17, No 2, pp. 277–284.
[5] Madej H., Diagnozowanie uszkodzeń mechanicznych w silnikach spalinowych maskowanych przez elektroniczne urządzenia sterujące, Wydawnictwo Nau-kowe Instytutu Technologii Eksploatacji — PIB, Radom 2009.
[6] Marine diesel engine MB 820N/1type manual, MERCEDES-BENZ.
[7] Wimmer A., Glaser J., Engine Indication, Institute of Technique Application Publisher, Warsaw 2004.
P R E L I M I N A R Y D I A G N O S T I C T E S T S O N S U B M A R I N E H I G H - S P E E D M A R I N E
D I E S E L E N G I N E U S I N G E N V E L O P E V I B R A T I O N M E T H O D
ABSTRACT
Checking and tuning of the fuel injection valves opening pressures, fuel valves timing and exhaust or inlet valves clearances is a common practice in high-speed marine diesel engines maintenance. Cost lowering tendency in engine maintenance schedules and unmanned vessel’s propulsion plants need new approach to these old and reliable procedures. Dynamic valve gear timing diagrams are indispensable to perform an accurate engine tuning. A new original diagnostic and tuning method for high-speed marine diesel engine MB820 type is presented in the paper.

Tomasz Lus
88 Zeszyty Naukowe AMW
In the principle this method based on measurements of: internal cylinder pressure curves and on vibration signals. Typical diagnostic methods which based on vibration signals analysis are sensitive to engine load and speed changes. Tests presented in this paper were focused on the possibilities and differences of the dynamic timing diagram assessing at engine rated load and when idling.
Keywords: marine diesel engine, diagnostics, fuel injector, valve gear.

ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1 (192) 2013
89
Jerzy Merkisz, Jaros ław Markowski, Jacek Pielecha Poli technika Poznańska Wydział Maszyn Roboczych i Transportu, Instytut Silników Spalinowych i Transportu 60-965 Poznań, ul. Piotrowo 3 e-mail: [email protected]; [email protected]; [email protected]
Tadeusz Mikutel , Robert Koz łowski 3. Skrzyd ło Lotnictwa Transpor towego w Powidzu 62-430 Powidz, ul. Witkowska 8
BADANIA STĘŻEŃ Z W IĄZ K Ó W S Z K O D L I W Y C H SPALIN TURBINOWEGO SILNIKA ŚMIGŁOWEGO
W US T AL O N Y CH W A R U N K A C H E K S P L O A T A C Y J N Y C H
STRESZCZENIE
W artykule przedstawiono wyniki badań emisji związków szkodliwych spalin silnika będą-cego źródłem napędu samolotu PZL M28 „Bryza”. Przeprowadzono je w warunkach próby silników na płycie lotniska. Następnie dokonano ich analizy, która pozwoliła na ocenę możliwości wykorzy-stania tego typu testów statycznych w pomiarach emisji związków toksycznych spalin z turbinowych silników śmigłowych.
Słowa kluczowe: emisja, związki szkodliwe, turbinowy silnik śmigłowy.
WSTĘP
Z chwilą wstąpienia Polski w struktury NATO nastąpiła reorganizacja pol-skiego lotnictwa wojskowego. Rozwój transportowego lotnictwa wojskowego sty-mulują odmienne mechanizmy i jest on ukierunkowany na zapewnienie gotowości do realizacji zadań związanych z działalnością w strukturze NATO. Większość zadań

Jerzy Merkisz, Jarosław Markowski, Jacek Pielecha, Tadeusz Mikutel, Robert Kozłowski
90 Zeszyty Naukowe AMW
transportowych lotnictwa wojskowego wiąże się z działalnością Polskich Sił Zbroj-nych poza granicami kraju. Powoduje to zapotrzebowanie na środki transportu lotni-czego charakteryzujące się możliwościami przemieszczania dużej masy ładunku na możliwie dalekie odległości. Taka specyfika zapotrzebowania zbliża transportowe lotnictwo wojskowe do lotnictwa cywilnego. Wzajemne relacje pomiędzy tymi dwoma parametrami wskazują na celowe wykorzystanie samolotów transportowych, których źródłem napędu są turbinowe silniki śmigłowe.
Zapotrzebowanie na transport lotniczy przekłada się niemal bezpośrednio na wzrost liczby samolotów. To z kolei nie jest bez znaczenia dla stanu środowiska naturalnego. W dalszym ciągu poważnym zagrożeniem jest emisja dwutlenku węgla oraz cząstek stałych — stanowiąca barierę rozwoju współczesnych silników spali-nowych. Obecne przepisy dotyczące wpływu środków transportu lotniczego na śro-dowisko wprowadzone przez EPA (Environmental Protection Agency — Agencja Ochrony Środowiska) oraz ICAO (International Civil Aviation Organization — Organizacja Międzynarodowego Lotnictwa Cywilnego) odnoszą się głównie do emisji hałasu i związków szkodliwych spalin ze szczególnym uwzględnieniem tlen-ków azotu. Dotyczą one silników przepływowych i zawierają procedury testów sta-cjonarnych, w zależności od warunków pracy silnika [3].
Realizacja badań emisji związków szkodliwych spalin silników lotniczych w testach stacjonarnych może być wykorzystana do budowy algorytmów pozwala-jących ocenić rzeczywistą emisyjność statków powietrznych, a tym samym może przyczynić się do dalszego rozwoju ich napędów.
METODYKA BADAŃ
O b i e k t b a d a ń
Do badań emisji związków szkodliwych zawartych w spalinach silnika lotniczego wykorzystano samolot PZL M28 „Bryza”, którego zespół napę-dowy stanowi silnik turbośmigłowy dwuwirnikowy ze sprężarką turbinową i swo-bodną turbiną śmigła TWD-10 B/PZL-10S wraz ze śmigłem HC-B5MP-3D/M 10876 ANSK (fot. 1.). Parametry zespołu napędowego PZL M28 „Bryza” przedsta-wiono w tabeli 1.

Badania stężeń związków szkodliwych spalin turbinowego silnika śmigłowego…
1 (192) 2013 91
Fot. 1. Silnik TWD-10 B/PZL-10S na samolocie PZL M28 „Bryza”
Źródło: zdjęcie wykonane przez autorów.
Tabela 1. Podstawowe dane zespołu napędowego PZL M28 „Bryza”
Silnik TWD-10 B/PZL-10S Moc na startowych parametrach pracy 705 kW (960 KM)
Masa silnika 230+2% kg Śmigło Hartzell HC-B5MP-3D/M 10876 ANSK
Typ ciągnące o zmiennym skoku z możliwością przejścia na rewers i ustawienia w chorągiewkę
Kierunek obrotów prawy Liczba łopat 5
Kąt ustawienia łopat: chorągiewka 79°
maksymalny rewers –14° Maksymalna prędkość obrotowa śmigła 1700 obr/min (93,1% nśm)
Prędkość obrotowa śmigła: chorągiewka maks. 400 obr/min (21,9% nśm)
rewers 1650 obr/min (90,3% nśm) Zabroniony przedział prędkości
na ziemi (400–1400) obr/min (21,9–76,7)% nśm
Źródło: Instrukcja eksploatacyjna samolotu M28 „Bryza”.

Jerzy Merkisz, Jarosław Markowski, Jacek Pielecha, Tadeusz Mikutel, Robert Kozłowski
92 Zeszyty Naukowe AMW
A p a r a t u r a b a d a w c z a
Do pomiarów stężenia związków szkodliwych wykorzystano mobilny anali-zator do badań toksyczności SEMTECH DS firmy SENSOR (fot. 2.). Analizator ten umożliwiał pomiar stężenia tlenku węgla, dwutlenku węgla, węglowodorów, tlenków azotu oraz tlenu. Gazy spalinowe wprowadzane są do analizatora za pomocą sondy pomiarowej utrzymującej temperaturę 191°C, następnie są filtrowane z cząstek sta-łych (w przypadku silników ZS) i następuje pomiar stężenia węglowodorów w anali-zatorze płomieniowo-jonizacyjnym. Następnie spaliny są schładzane do temperatury 4°C i następuje kolejno pomiar stężenia tlenków azotu, tlenku węgla, dwutlenku węgla oraz tlenu [1].
Fot. 2. Widok analizatora spalin
Źródło: zdjęcie wykonane przez autorów.
Na potrzeby pomiarów emisji związków szkodliwych spalin dokonano mon-tażu dodatkowych wsporników przy dyszy wylotowej spalin silnika niezbędnych do zamocowania sondy pomiarowej. Przewody doprowadzające spaliny do analizatora zamocowano do konstrukcji płatowca samolotu, analizator zaś umieszczono we wnętrzu samolotu przy drzwiach luku bagażowego (fot. 3.).

Badania stężeń związków szkodliwych spalin turbinowego silnika śmigłowego…
1 (192) 2013 93
Fot. 3. Miejsce zamocowania sondy poboru spalin i umieszczenia analizatora
Źródło: zdjęcie wykonane przez autorów.
C e l b a d a ń i j e g o r e a l i z a c j a
Celem przeprowadzonych badań było dokonanie pomiaru emisji związków szkodliwych spalin z silnika turbośmigłowego podczas przedstartowej próby silnika samolotu znajdującego się na płycie lotniska. W trakcie próby silnika dokonano ciągłego pomiaru stężeń związków tlenku węgla, dwutlenku węgla, węglowodorów i tlenków azotu. Zdecydowano się na pomiary podczas przedstartowej próby silnika, ponieważ zawiera ona w swej procedurze obciążenia silnika odpowiadające obcią-żeniom możliwie zbliżonym do rzeczywistych warunków eksploatacyjnych. Próba przedstartowa silnika jest realizowana zgodnie z instrukcją zalecaną przez producen-ta danego zespołu napędowego. Przebieg próby i wartości poszczególnych parame-trów eksploatacyjnych silnika były rejestrowane przez rejestrator znajdujący się na wyposażeniu badanego statku powietrznego.
WYNIKI POMIARÓW
Zarejestrowano dane eksploatacyjne zespołu napędowego w dziedzinie czasu oraz dokonano ciągłego pomiaru stężeń wybranych związków szkodliwych spalin. Dzięki temu można było zsynchronizować poszczególne fazy próby silnika z po-miarami emisji poszczególnych związków. Wynik takiego zestawienia można zobrazować wykreślnie (rys. 1.). Na wykresie wyróżniono pionowymi liniami poszczególne fazy próby przedstartowej silnika. Charakterystyczny dla silników turbinowych jest początek uruchomienia. W tej części próby widoczne jest tylko

Jerzy Merkisz, Jarosław Markowski, Jacek Pielecha, Tadeusz Mikutel, Robert Kozłowski
94 Zeszyty Naukowe AMW
duże stężenie węglowodorów, bezpośrednio związane z dostarczeniem paliwa do komory spalania. Następnie z chwilą inicjacji zapłonu w komorze spalania gwał-townie rosną stężenia związków tlenku węgla, dwutlenku węgla, a także węglo-wodorów. Wzrost stężeń tych związków jest konsekwencją procesu spalania, który początkowo jest mało efektywny. Stężenia tych związków szybko maleją w miarę rozgrzewania się silnika.
Rys. 1. Wyniki pomiarów stężenia związków szkodliwych spalin w dziedzinie czasu
podczas przebiegu próby przedstartowej silnika TWD-10 B/PZL-10S
Źródło: opracowanie własne. Rozgrzewanie się silnika przyczynia się do wzrostu stężenia tlenków azotu
w spalinach. Podczas próby nie odnotowano stężeń tlenków azotu większych niż 80 ppm, a w około 70% czasu trwania próby wartość stężenia wynosiła około 30 ppm. Wartości stężeń tlenku węgla i węglowodorów w dalszej części próby silnika cha-rakteryzują się małą dynamiką zmian i oscylują w zakresie wartości: tlenek węgla — 40 ppm, węglowodory — 15 ppm. Natomiast wartości stężenia dwutlenku węgla związane są z obciążeniem silnika i wynoszą: dwutlenek węgla — 2%, silnik bez obciążenia; dwutlenek węgla — 3,5%, silnik z obciążeniem. Tak niskie stężenia

Badania stężeń związków szkodliwych spalin turbinowego silnika śmigłowego…
1 (192) 2013 95
tego związku w spalinach związane są z dużym współczynnikiem nadmiaru powie-trza w komorze spalania.
PODSUMOWANIE
Przeprowadzone badania stanowią początkowy fragment dalszej analizy, zmierzającej do podjęcia próby oszacowania emisji związków toksycznych spalin silnika turbośmigłowego w rzeczywistych warunkach eksploatacyjnych samolotu. Ostatecznie uzyskane podczas realizacji tego typu badań informacje mogą być wykorzystane do weryfikacji i opracowania uniwersalnych procedur badawczych określających wskaźniki i charakterystyki emisji statków powietrznych oraz ich oddziaływanie na środowisko.
BIBLIOGRAFIA
[1] Instrukcja analizatora spalin SEMTECH DS.
[2] Instrukcja eksploatacyjna samolotu M28 „Bryza”.
[3] Kotlarz W., Turbinowe zespoły napędowe źródłem skażeń powietrza na lotni-skach wojskowych, Wyższa Szkoła Oficerska Sił Powietrznych, Dęblin 2003.
[4] Opinia Europejskiego Komitetu Ekonomiczno-Społecznego z dnia 28 lipca 2009 roku w sprawie „Europejski sektor lotniczy: stan obecny i perspektywy”.
E M I S S I O N T E S T S O F T H E T U R B O P R O P E N G I N E
O F S T E A D Y O P E R A T I N G C O N D I T I O N S
ABSTRACT
The article presents the results of the exhaust gas emissions research of the aircraft PZL M28 ‘Bryza’ engine provided during the stationary engines test on the apron. The paper

Jerzy Merkisz, Jarosław Markowski, Jacek Pielecha, Tadeusz Mikutel, Robert Kozłowski
96 Zeszyty Naukowe AMW
presents the results of the comparative analysis of achieved measurements. The analysis enables us to assess the method of the emissions measurement of the toxic gases contained in the exhaust gases of the turboprop engines.
Keywords: emissions, toxic compounds, turboprop engines.

ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1 (192) 2013
97
Ryszard Studański Akademia Marynarki Wojennej Wydział Mechaniczno-Elektryczny, Instytut Elektrotechniki i Automatyki Okrętowej 81-103 Gdynia, ul. J. Śmidowicza 69 e-mail: [email protected]
Józef Zawadzki, Rados ław Wąs Marynarka Wojenna RP
S T A N O W I S K O L A B O R A T O R Y J N E D O S Z E R O K O P A S M O W E J A N A L I Z Y
S Y G N AŁÓ W R A D I O K O M U N I K A C Y J N Y C H
STRESZCZENIE
W artykule przedstawiono możliwości stanowiska laboratoryjnego zapewniającego reje-strację sygnałów w paśmie do 20 MHz. Opisano zastosowane procedury przetwarzania. Zwrócono uwagę na efektywność przetwarzania w dziedzinie częstotliwości. Ponadto opisano zastosowanie stanowiska do wykrywania sygnałów DS SS o widmowej gęstości mocy poniżej tła szumu.
Słowa kluczowe: cyfrowe przetwarzanie sygnałów, odbiór szerokopasmowy, wykrywanie sygnałów.
WSTĘP
Nieustanny postęp technologiczny w obszarze podzespołów elektronicznych powoduje, że możliwe jest cyfrowe przetwarzanie sygnałów o coraz wyższych czę-stotliwościach obejmujących coraz szersze pasmo. Pozwala to na nowe podejście do technik odbiorczych i w znacznym stopniu wyeliminowanie skomplikowanych, często niewydolnych, analogowych sposobów przetwarzania sygnałów. Cyfrowe przetwarzanie sygnałów rejestrowanych w szerokim paśmie jest szczególnie intere-sujące dla potrzeb analizy sygnałów radiokomunikacyjnych. Przykładem takiego rozwiązania jest prezentowane stanowisko laboratoryjne zapewniające analizę sy-gnałów zarejestrowanych w szerokim paśmie.

Ryszard Studański, Józef Zawadzki, Radosław Wąs
98 Zeszyty Naukowe AMW
OPIS STANOWISKA
Podstawowy schemat blokowy zestawu odbiorczego rejestratora zaprezen-towano na rysunku 1. Sygnał wysokiej częstotliwości z wyjścia antenowego jest dostarczany na wejście odbiornika szerokopasmowego. Odbiornik ten pełni jedynie funkcję mieszacza, sprowadzając sygnał w.cz. do pasma pośrednich częstotliwości, tak by można było odebrany sygnał przetworzyć do postaci cyfrowej, a następnie przekazywany jest do komputera, gdzie realizowane jest właściwe przetwarzanie.
Rys. 1. Schemat blokowy zestawu odbiorczego
Źródło: opracowanie własne.
W omawianym rejestratorze komputer nadzoruje pracę karty akwizycji da-nych (przetwornika A/C) oraz odbiornika szerokopasmowego, a ponadto realizuje przetwarzanie sygnałów oraz ich zapis w pamięci trwałej dla potrzeb ewentualnej późniejszej analizy.
Zaprezentowany na rysunku 2. schemat przetwarzania jest dostosowany do odbioru sygnałów jednego z satelitarnych systemów radiokomunikacyjnych. W sys-temie tym zastosowano modulację OQPSK, a szerokość pasma kanału jest równa 10 kHz. Omawiany rejestrator pozwala na jednoczesną analizę sygnałów w paśmie do 20 MHz. Dla takiej szerokości pasma karta akwizycji danych próbkuje sygnały z czę-stotliwością 50 MHz. Aby odczytać informacje przesyłane w pojedynczym kanale częstotliwościowym, należy odfiltrować pożądany kanał, a następnie sprowadzić go

Stanowisko laboratoryjne do szerokopasmowej analizy sygnałów radiokomunikacyjnych
1 (192) 2013 99
do niższych częstotliwości. W rejestratorze przyjęto, że operacje synchronizacyjne przeprowadzane są na sygnale o częstotliwości 50 kHz. Wówczas można zmniej-szyć liczbę próbek tego sygnału 64-krotnie. Dopiero wówczas uruchamiane są pro-cedury synchronizacyjne.
Rys. 2. Schemat blokowy przetwarzania sygnału
Źródło: opracowanie własne.
Pierwszym etapem synchronizacji sygnału jest wstępne określenie jego czę-stotliwości. Częstotliwość ta jest niezbędna do wytworzenia sygnału wzorcowego używanego w bloku synchronizacji symbolowej i ramkowej. Częstotliwość sygnału wzorcowego musi być zbliżona do częstotliwości sygnału odbieranego, aby syn-chronizacja ramkowa i symbolowa, realizowana poprzez korelację wzajemną wzor-ca i sygnału odbieranego (blok korelacyjny), była efektywna. Gdy znany jest takt symbolowy i ramkowy, można przeprowadzić dokładną synchronizację częstotliwo-ści i fazy. Po zgromadzeniu wszystkich informacji o sygnale odbieranym można go zdemodulować. Przez dalsze przetwarzanie należy rozumieć ewentualne dekodowanie kanałowe, deszyfrację, dekodowanie źródłowe — procedury niezbędne do wyod-rębnienia informacji ze zdemodulowanego sygnału, a związane ściśle z rozpatrywa-nym system radiokomunikacyjnym.
Stanowisko do szerokopasmowej rejestracji sygnałów składa się z podsta-wowych czterech elementów:
— zestawu anten; — odbiornika szerokopasmowego; — 14-bitowego przetwornika A/C; — komputera będącego faktycznym rejestratorem sygnałów.

Ryszard Studański, Józef Zawadzki, Radosław Wąs
100 Zeszyty Naukowe AMW
Na rysunku 3. pokazano schemat stanowiska do analizy i rejestracji sygnałów satelitarnych. Prezentowany rejestrator dysponuje trzema antenami odbiorczymi:
— paraboliczną z promiennikiem pasywnym; — paraboliczną z promiennikiem aktywnym; — tubową SAS 571.
Ponieważ podczas testów rejestratora rozpatrywano jeden z satelitarnych systemów komunikacyjnych, anteny paraboliczne służą jedynie do akwizycji sygna-łów w łączu w dół tego systemu i są skierowane na dwa różne satelity, natomiast antena tubowa jest stosowana do odbioru sygnałów w łączu w górę. Sygnały z wyjść antenowych są dostarczane na wejście odbiornika poprzez wzmacniacze niskoszumne. W przypadku sygnałów w łączu w dół zastosowano dodatkowo filtr pasma L (w pa-śmie tym pracuje analizowany system).
Rys. 3. Schemat stanowiska do analizy sygnałów systemów satelitarnych
Źródło: opracowanie własne.

Stanowisko laboratoryjne do szerokopasmowej analizy sygnałów radiokomunikacyjnych
1 (192) 2013 101
W sytuacji gdy serwer obliczeniowy zostanie wyposażony w oprogramowa-nie pozwalające dekodować i deszyfrować zapisywane transmisje, można dołączyć do niego dekodery niezbędne do odtwarzania sygnałów mowy czy też transmisji faksowych.
OPROGRAMOWANIE REJESTRATORA SZEROKOPASMOWEGO
Jak wspomniano we wstępie, najważniejszym elementem radia programowal-nego jest część programowa. Przygotowane oprogramowanie umożliwia sterowanie:
— kartą akwizycji w zakresie wyboru częstotliwości próbkowania; — odbiornikiem co do wyboru:
• częstotliwości środkowej sygnałów wejściowych, • szerokości pasma, w którym odbierane są sygnały, • częstotliwości środkowej na wyjściu odbiornika (p.cz.).
W celu weryfikacji omawianego szerokopasmowego rejestratora badania przeprowadzono, analizując sygnały radiokomunikacyjne satelitarnego systemu komunikacyjnego.
Po uruchomieniu aplikacji i włączeniu analizy sygnałów są one automatycz-nie rejestrowane w pamięci komputera. W aplikacji przewidziane są pola w interfej-sie użytkownika, w których zawarte są informacje systemowe rozsyłane w kanałach rozsiewczych. Dane te są odczytywane w czasie rzeczywistym. W badaniach spraw-dzono możliwość jednoczesnego odbioru wielu kanałów komunikacyjnych. System przetwarzania oparto na pracy wielowątkowej. Każdy kanał analizowano w osobnym wątku. Analiza poprawności odbioru była przeprowadzana na podstawie znanych, niezaszyfrowanych i powtarzanych w każdej ramce preambuł. Prezentowany zestaw zapewniał jednoczesny odbiór, bez wprowadzania opóźnień, do ośmiu kanałów.
Aplikacja udostępnia również tryb archiwalny, w którym użytkownik wska-zuje wcześniej zapisany plik do analizy.
Funkcjonalność takiej aplikacji można dowolnie rozbudowywać o udostęp-nienie użytkownikowi wyboru analizy poszczególnych, wybranych przez niego ka-nałów lub też kanałów według rodzajów transmisji (faks, mowa, dane — zależnie od rodzajów transmisji udostępnianych przez dany system radiokomunikacyjny).
Przygotowane oprogramowanie dowodzi, że jednoczesna rejestracja wielu kanałów częstotliwościowych jest możliwa. Dzięki takiej metodzie rejestracji sygna-łów nie traci się informacji transmitowanych w nieanalizowanych kanałach.

102
Nkopasmorzeczywi
— odb— wek— ana— kart— sum— ante— sate— filtr— kom
Rys. 4. S
Źródło: o
PRZETWSYG
Na stanowisowych sygnistych sygnał
biornik szerokktorowy genelizator widmtę akwizycji
mator sygnałuenę dookólnąelitarną antenr pasmowy 1mputer.
Schemat blokow w
opracowanie w
WARZANIEGNAŁÓW S
ku przeznacałów fizyczłów radiokom
kopasmowy;erator sygnał
ma; (przetwornik
u; ą do pracy wnę do pracy w525–1559 M
owy stanowiskwarunkach od
własne.
Ryszard
E DLA POTSZEROKOP
zonym do bnych prowa
munikacyjnyc
; łów z wbudo
k A/C);
w zakresie 0,3w paśmie L;
MHz;
ka laboratoryjnddziaływania s
d Studański, Jó
TRZEB WYPASMOWY
badań laboratadzonych w ch zastosowa
owanym gen
3–10 GHz;
nego do badańsygnałów rzec
ózef Zawadzk
Zeszyty
YKRYWANYCH DS SS
toryjnych z warunkach
ano następują
eratorem szu
ń wykrywania czywistych
ki, Radosław W
Naukowe AM
NIA
użyciem szeoddziaływaące urządzen
umu;
sygnałów DS
Wąs
MW
ero-ania nia:
SS

Stanowisko laboratoryjne do szerokopasmowej analizy sygnałów radiokomunikacyjnych
1 (192) 2013 103
Konfiguracja urządzeń zapewniła przeprowadzenie eksperymentu, którego celem było wykrycie transmisji szerokopasmowej DS SS z modulacją BPSK o ujemnej wartości SNR, realizowanej w sąsiedztwie rzeczywistych i względnie silnych sygnałów wąskopasmowych stanowiących zakłócenie dla algorytmów de-tekcji (przełącznik wejścia RF1 w odbiorniku ustawiony w pozycji A — rys. 4.).
DETEKCJA SYGNAŁÓW DS SS Z ELIMINACJĄ SYGNAŁÓW WĄSKOPASMOWYCH
Eksperyment wykonano w celu wykrycia transmisji szerokopasmowej DS SS z modulacją BPSK o ujemnej wartości SNR, realizowanej w sąsiedztwie rzeczywi-stych i względnie silnych sygnałów wąskopasmowych stanowiących zakłócenie dla algorytmów detekcji. Zaprezentowano wyniki dla procedur realizowanych w dwóch przypadkach, tj. przy nieaktywnym oraz aktywnym bloku wykrywania i eliminacji sygnałów wąskopasmowych. Doświadczenie przeprowadzono w układzie pomiaro-wym, którego schemat przedstawiono na rysunku 4. (przełącznik wejścia RF1 w odbiorniku ustawiony w pozycji A).
Celem eksperymentu było sprawdzenie możliwości wykrycia sygnału DS SS z modulacją BPSK w obecności sygnałów rzeczywistych. Jako tło wykorzystano sygnały satelitarne odbierane w zakresie częstotliwości od 1525 MHz do 1560 MHz, natomiast sygnał DS SS z modulacją BPSK zapewniał generator. Zakres częstotli-wościowy pasma do badań dobrano w taki sposób, by w sąsiedztwie poszukiwanego sygnału występowały względnie silne zakłócenia wąskopasmowe. Wartości stosunku maksymalnego poziomu mocy nośnej do poziomu szumu dla sygnałów „zakłócają-cych” zawierały się w przedziale od 10 do 20 dB (rys. 5a). Parametry generowanego sygnału DS SS dobrano w taki sposób, by na wejściu karty akwizycji uzyskać ujemny stosunek mocy poszukiwanego sygnału do mocy szumu wynoszący SNR = –10 dB. Zakres częstotliwości objęty występowaniem transmisji szerokopasmowej z bezpo-średnim rozpraszaniem widma zaznaczono na rysunku 5a oraz 6a w postaci zacie-niowanego pola (BDS = 2,44 MHz, fn = 21,4 MHz na p.cz.). Wyniki doświadczenia w postaci charakterystyk widma gęstości mocy sygnałów analizowanego pasma oraz WGM dla próbek sygnału podniesionych do kwadratu (w zakresie dwukrotnie więk-szych częstotliwości) przedstawiono na rysunkach 5. i 6. W prezentowanych charak-terystykach widmowych zastosowano FFT o rozmiarze N = 214.

Ryszard Studański, Józef Zawadzki, Radosław Wąs
104 Zeszyty Naukowe AMW
Rys. 5. Przykładowe WGM sygnału na wyjściu karty akwizycji (a) oraz wynik wykrywania transmisji DS SS przy braku procedur
eliminacji sygnałów wąskopasmowych (b)
Źródło: opracowanie własne. Analizując uzyskane wyniki, można stwierdzić, że w przypadku gdy sygna-
ły wąskopasmowe nie były poddawane eliminacji (rys. 5b), warunek detekcji został spełniony dla sześciu składowych widma. Jak łatwo zauważyć, żadna ze składowych przewyższających próg detekcji nie pochodzi od poszukiwanego sygnału DS SS ukrytego w szumie. Ponadto w środkowej części pasma analizy pojawiły się niepo-żądane „fałszywe” składowe jako produkty intermodulacji, powstające w wyniku podniesienia próbek sygnału do potęgi drugiej. Podsumowując przeprowadzone doświadczenia, można stwierdzić, że proces detekcji został zakłócony poprzez sy-gnały wąskopasmowe, a uzyskane wyniki dają mylne wyobrażenie o istnieniu w analizowanym paśmie sygnałów szerokopasmowych DS SS o ujemnych warto-ściach SNR.
3.6 3.8 4 4.2 4.4 4.6 4.8
x 107
0
2
4
6
x 10-8
1.8 1.9 2 2.1 2.2 2.3 2.4 2.5
x 107
-35
-30
-25
-20
-15
-10
-5

Stanowisko laboratoryjne do szerokopasmowej analizy sygnałów radiokomunikacyjnych
1 (192) 2013 105
Wobec powyższego procedury detekcji zostały powtórzone na tym samym ciągu próbek, ale tym razem z uaktywnionym blokiem wykrywania i eliminacji sy-gnałów wąskopasmowych. W wyniku zastosowania odpowiednich procedur wykry-to i wyeliminowano sześć sygnałów wąskopasmowych. Wówczas uzyskano WGM, którego postać w zakresie pasma analizy zaprezentowano na rysunku 6a. Tak przy-gotowany sygnał przetworzono zgodnie z algorytmem wykrywania transmisji DS SS z modulacją BPSK metodą analizy widma próbek podniesionych w dziedzinie czasu do potęgi drugiej, a uzyskany wynik w formie graficznej, wraz z zaznaczonymi pro-gami detekcji, przedstawiono na rysunku 6b.
Rys. 6. WGM sygnału z rys. 5a po przeprowadzeniu eliminacji sygnałów wąskopasmowych (a) oraz wynik realizacji procedur wykrywania transmisji DS SS z modulacją BPSK (b)
Źródło: opracowanie własne.
1.8 1.9 2 2.1 2.2 2.3 2.4 2.5
x 107
-35
-30
-25
-20
-15
-10

Ryszard Studański, Józef Zawadzki, Radosław Wąs
106 Zeszyty Naukowe AMW
W przeprowadzonym doświadczeniu częstotliwość środkowa w.cz. dla ob-wodów wejściowych odbiornika odpowiadała częstotliwości nośnej wygenerowane-go sygnału z widmem rozproszonym, co w konsekwencji powinno skutkować pojawieniem się składowej Ph (harmoniczna pochodząca od poszukiwanego sygnału DS SS) na częstotliwości 42,8 MHz, a więc dokładnie dwukrotnie wyższej od no-śnej p.cz. wynoszącej 21,4 MHz.
Analizując uzyskane wyniki (rys. 6b), można przyjąć, że w obserwowanym przypadku detekcja składowej Ph nastąpiła bezbłędnie, a częstotliwość fali nośnej (w paśmie p.cz.) wykrytego sygnału DS SS określona została jako 21, 401 978 MHz, co przy rozdzielczości widma fWGM = 6,103 kHz (wynikającej z rozmiaru zastoso-wanej FFT) jest wynikiem odbiegającym od rzeczywistej częstotliwości wygenero-wanego sygnału o 1,978 kHz, czyli poniżej rozróżnialności częstotliwościowej wyznaczonego WGM.
PODSUMOWANIE
Aktualne oprogramowanie stanowiska umożliwia rejestrację i analizę sygna-łów wybranych standardów geostacjonarnego satelitarnego systemu łączności Inmar-sat i wykrywanie sygnałów DS SS o gęstości widmowej mocy mniejszej od szumu termicznego. Przeprowadzone badania wskazują na zasadność szerokopasmowej rejestracji sygnałów dla potrzeb ich analizy.
Zaproponowane rozwiązanie jest zdecydowanie prostszym i tańszym od rozwiązań stosujących analizę dla każdego z kanałów w oddzielnych torach odbior-czych. Przetwarzanie sygnałów w dziedzinie częstotliwości, takie jak filtracja, prze-miana, synchronizacja, zapewnia odbiór kanałów w czasie rzeczywistym. Ponadto uniwersalność stanowiska pozwala na prowadzenie analizy w dowolnym paśmie czę-stotliwości (ograniczenia stanowią zakres częstotliwości systemu antenowego oraz przestrajania odbiornika) i dla dowolnych standardów radiokomunikacyjnych (po ich programowej implementacji).

Stanowisko laboratoryjne do szerokopasmowej analizy sygnałów radiokomunikacyjnych
1 (192) 2013 107
BIBLIOGRAFIA
[1] Burel G., Detection of Spread Spectrum Transmissions Using Fluctuations of Correlation Estimators, IEEE Int. Symp. on Intelligent Signal Processing and Communication Systems, Hawaii 2000.
[2] Jażdżewski R., Median Filter Application for the Detection of Direct Sequence Spread Spectrum Signals in the Presence of Narrowband Interferences, Regional Conference on Military Communication and Information Systems, Zegrze 2001.
[3] Katulski R. J., Studanska A., Stefanski J., Studanski R., Was R., Influence of Narrowband Interferences on DS CDMA Signals Detection, Proceedings of the 18th International Conference, September 2008, Wilno — Litwa, Vilnius ‘Technika’ 2008, pp. 57–62.
[4] Luc A., Vosicki V, Janicek M., Transmission and Detection of DS SS Signal Under Noise, Regional Conference on Military Communication and Information Systems, Zegrze 2000.
[5] Studański R., Brewka M., Studańska A., Wąs R., Cyfrowy odbiór sygnałów systemu Inmarsat, XVII International Scietific and Technical Conference ‘The role of navigation in support of human activity’, Gdynia 2010.
[6] Studański R., Wąs R., Detekcja sygnałów DS CDMA metodą sumowania widma, V Międzynarodowa Konferencja „Perspektywy i rozwój systemów ratownictwa, bezpieczeństwa i obronności w XXI wieku”, Gdańsk 2005.
[7] Studański R., Wąs R., Wykrywanie sygnałów DS SS dla potrzeb morskich sys-temów analiz radiowych, Krajowa Konferencja Radiokomunikacji, Radiofonii i Telewizji, Poznań 2006, s. 360–363.
L A B O R A T O R Y S T A N D F O R A N A L Y S I S R A D I O C O M M U N I C A T I O N S I G N A L S
ABSTRACT
A laboratory stand for wideband analysis radiocommunication signals is presented in the paper. The stand is designed for signals acquisition in wide spectrum and research a field of digital signal processing. Procedures used for simultaneous acquiring many frequency channels in selected

Ryszard Studański, Józef Zawadzki, Radosław Wąs
108 Zeszyty Naukowe AMW
wide band are described. The method of detection of direct sequence spread spectrum signals (DS SS) which power spectral density is lower than noise is also discussed. Executed research were performed with signals locally generated and with signals from real radio communication systems.
Keywords: digital signal processing, wideband receiving of signals, signals detection.

ZESZYTY NAUKOWE AKADEMII MARYNARKI WOJENNEJ ROK LIV NR 1 (192) 2013
109
Hubert Wysocki Akademia Marynarki Wojennej Wydział Mechaniczno-Elektryczny, Katedra Matematyki i Fizyki 81-103 Gdynia, ul. J. Śmidowicza 69 e-mail: [email protected]
M O D E L R A C H U N K U O P E R A T O R Ó W D L A R ÓŻN I C Y W S T E C Z N E J
P R Z Y P O D S T A W A C H
STRESZCZENIE
W pracy skonstruowano dyskretny model rachunku operatorów Bittnera, w którym po-chodna rozumiana jest jako operacja różnicowa . Stanowi on uogólnienie ‐modelu z różnicą wsteczną .
Słowa kluczowe: rachunek operatorów, pochodna, pierwotne warunki graniczne, różnica wsteczna, element wy-kładniczy.
PODSTAWY RACHUNKU OPERATORÓW
Rachunkiem operatorów Bittnera [1–3] nazywamy zespół
(1)
gdzie i są przestrzeniami liniowymi (nad tym samym ciałem skalarów 1) takimi, że . Operacja liniowa (co zapisujemy ), nazywana pochodną (abstrakcyjną), jest surjekcją. Ponadto jest zbiorem wskaźni-ków dla operacji takich, że , zwanych pier-wotnymi i dla operacji takich, że , zwanych warunkami granicznymi.
1 Będziemy zakładali, że i są przestrzeniami rzeczywistymi, tzn. .

Hubert Wysocki
110 Zeszyty Naukowe AMW
Jądro operacji , tzn. nazywamy zbiorem stałych dla pochodnej . Nietrudno sprawdzić, że warunki graniczne są rzutami na podprze-strzeń . Przez indukcję określa się ciąg przestrzeni 2 w taki sposób, że
Wówczas oraz
gdzie
W pracy wykorzystane zostaną następujące twierdzenia pomocnicze [3]:
Lemat 1. Abstrakcyjne równanie różniczkowe
z warunkami granicznymi
ma jednoznaczne rozwiązanie
(2)
Lemat 2. Przy danej pochodnej rzut wyznacza pierwotną z warunku
Ponadto rzut jest warunkiem granicznym przy pierwotnej .
Każdy rachunek operatorów określony przez zadanie obiektów (1) nazywa-my jego reprezentacją lub modelem.
Przykład 1. Niech będzie zbiorem liczb całkowitych. Jest oczywiste, że zbiór nieskończonych ciągów rzeczywistych ze zwykłymi działaniami
2 oznacza zbiór liczb całkowitych dodatnich.

Model ruchu operatorów dla różnicy wstecznej przy podstawach a, b
1 (192) 2013 111
dodawania ciągów i mnożenia ciągów przez liczby rzeczywiste jest przestrzenią liniową. W pracy [8] wykazano, że zespół (1), gdzie ,
oraz (3)
(4)
(5)
tworzy dyskretny ‐model rachunku operatorów Bittnera z pochodną jako różnicą wsteczną 3.
‐MODEL
Uogólnieniem pochodnej (3) jest operacja
4, (6)
gdzie są ciągami danymi i takimi, że
(7)
Operację (6) będziemy nazywali różnicą wsteczną przy podstawach (por. 4]). Łatwo sprawdzić, że
oraz
o ile ciągi spełniają warunek (7).
3 Z uwagi na definicję pierwotnych , zakłada się, że . 4 W pracy tej mnożenie ciągów oznacza zwykłe mnożenie po współrzędnych.

Hubert Wysocki
112 Zeszyty Naukowe AMW
Do konstrukcji modelu rachunku operatorów związanego z pochodną (6) wykorzystamy ideę rozwiązywania równania opisaną w pracy [6]. Niech . Nietrudno sprawdzić, że ciągi mają postać
(8)
gdzie jest dowolną stałą rzeczywistą. Niech będzie ciągiem dla . W związku z tym przyjmijmy również, że .
Rozważmy równanie różnicowe
tzn. (9) Mamy stąd
(10)
Ponieważ
więc z (10) otrzymujemy
Ostatecznie (11) gdzie
(12)
Równanie (11) możemy przedstawić w postaci
(13)

Model ruchu operatorów dla różnicy wstecznej przy podstawach a, b
1 (192) 2013 113
Z lematu 1. (dla ) wynika, że rozwiązaniem równania (13) jest ciąg
gdzie są pierwotnymi (4), natomiast warunkami granicznymi (5). Z (12) otrzymujemy . Zatem
(14)
jest rozwiązaniem równania (9).
Niech
(15)
Korzystając z definicji (5) warunków granicznych , otrzymujemy
Zatem . Ponadto
ponieważ . Ostatecznie jest rzutem na dla każdego .
Z lematu 2. wynika, że rzut wyznacza pierwotną ze wzoru (14). Mianowicie
(16)
Ponadto jest warunkiem granicznym odpowiadającym pierwotnej (16). W ten sposób otrzymujemy:
Wniosek 1. Zespół (6), (15), (16) tworzy dyskretny ‐model rachunku operato-rów Bittnera (17)

Hubert Wysocki
114 Zeszyty Naukowe AMW
Przykład 2. W modelu (17), dla
równanie różnicowe (18) przyjmuje postać
(19)
Wyznaczymy takie rozwiązanie równania (19), żeby
(20)
gdzie oraz są danymi wartościami początkowymi.
Z lematu 1. wynika, że równanie (18) z warunkami granicznymi
(21)
ma dokładnie jedno rozwiązanie dane wzorem (2) dla , tzn.
(22)
Z (15) wynika, że warunki początkowe (20) jednoznacznie określają warun-ki graniczne (21). Mianowicie
gdzie .
Korzystając z (22), otrzymujemy następujące rozwiązanie zagadnienia (19), (20):
‐model (17) możemy również uzyskać z dyskretnej reprezentacji ra-chunku operatorów
5 (23)
wprowadzonej przez autora w pracy [8].
5 Index ,,1” występujący w operacjach modelu (23) oznacza ciąg .

Model ruchu operatorów dla różnicy wstecznej przy podstawach a, b
1 (192) 2013 115
Mamy bowiem
oraz
ELEMENT WYKŁADNICZY
Niech i będą takimi liczbami rzeczywistymi, że oraz
Rozwiązanie zagadnienia
(24)
nazywamy elementem wykładniczym (o wykładniku )6. Ponieważ , zatem na podstawie (8) wnioskujemy, że rozwią-zaniem zagadnienia (24) jest ciąg
(25)
W szczególności element wykładniczy odpowiadający różnicy wstecznej ma postać
(26)
6 W (24) liczbę utożsamiamy z ciągiem stałym .

Hubert Wysocki
116 Zeszyty Naukowe AMW
Ciąg (25) jest jedynym rozwiązaniem zagadnienia (24). Istotnie, gdyby ist-niały dwa rozwiązania zagadnienia (24), to dla mielibyśmy , czyli . Ponadto byłoby
skąd wynika, że dla każdego .
Przykład 3. Niech będzie rozwiązaniem bilateralnego niejednorod-nego równania różnicowego rzędu
(27)
gdzie są danymi liczbami rzeczywistymi oraz .
Relacja (27) określa ciąg jednoznacznie, jeżeli dla pewnego znanych jest kolejnych jego wyrazów
(28)
Wówczas, na podstawie (27), pozostałe wyrazy wyznaczamy rekurencyjnie, stosując wzory
oraz
Niech . Nietrudno sprawdzić, że dla podstawienie
gdzie , pozwala sprowadzić (27) do równania jednorodnego
(29)

Model ruchu operatorów dla różnicy wstecznej przy podstawach a, b
1 (192) 2013 117
Uwzględniając (28), równaniu (29) odpowiadają warunki początkowe
(30)
Stosując model rachunku operatorów z pochodną jako różnicą wsteczną (przy-kład 1.), równanie (29) możemy przedstawić w postaci
(31)
gdzie oraz
(32)
co wynika z twierdzenia 1 [9]. Z kolei na podstawie wniosku 1 [9] stwierdzamy, że warunkom początkowym (30) odpowiadają równoważne warunki graniczne postaci
(33)
Zagadnienie (31), (33) możemy rozwiązać w tzw. przestrzeni wyników ge-nerowanej przez ciągi dwustronne [9]. Mówiąc najogólniej, wyniki powstają przez ,,dzielenie” ciągów dwustronnych przez injekcyjne endomorfizmy przestrzeni . Rezultatem takiego działania mogą być wyniki regularne, czyli ciągi dwustronne oraz wyniki singularne, które nie są elementami przestrzeni [7]. Na przykład
jest wynikiem singularnym [3], natomiast element wykładniczy (26) jest wynikiem regularnym postaci
tzn.
(34)
gdzie jest tzw. operatorem Heaviside’a, natomiast jest operacją iden-
tycznościową określoną na przestrzeni [9].
Szczególnym przypadkiem równania postaci (27) jest równanie określające tzw. ciąg soczewkowy [5].

Hubert Wysocki
118 Zeszyty Naukowe AMW
Formalnym ciągiem soczewkowym generowanym przez uporządkowaną trójkę liczb nazywamy ciąg będący rozwiązaniem zagadnienia
; (35)
(36) gdzie
Wówczas . Ponadto stałe i są ,,niezmiennikami” ciągu w tym sensie, że ich wartości mogą być wyznaczone na podstawie każdych trzech kolej-nych wyrazów tego ciągu. Jeżeli , to (35) jest równoważne równaniu jednorodnemu
(37) gdzie
natomiast (36) odpowiadają warunki początkowe
(38)
Z kolei w ‐modelu zagadnienie (37), (38) przyjmuje postać
gdzie oraz
Dla ustalenia uwagi rozważmy zagadnienie
generowane przez trójkę . Jest ono równoważne zagadnieniu
; (39)
(40)
gdzie .

Model ruchu operatorów dla różnicy wstecznej przy podstawach a, b
1 (192) 2013 119
Działając na równanie (39) obustronnie operacją , po uwzględnieniu wa-runków granicznych (40), otrzymujemy
czyli
gdzie jest operatorem Heaviside’a odpowiadającym pierwotnej .
Stąd, po rozkładzie na ułamki proste, uzyskujemy ciąg w postaci wyniku
(41)
gdzie
Porównując (41) z (34), stwierdzamy, że wyraża się przez elementy wy-kładnicze. Ostatecznie wyraz ogólny dwustronnego ciągu soczewkowego
generowanego przez uporządkowaną trójkę liczb ma postać
skąd, po prostych przekształceniach, otrzymujemy (por. 5])
BIBLIOGRAFIA
[1] Bittner R., On certain axiomatics for the operational calculus, ‘Bull. Acad. Polon. Sci.’, 1959, Cl. III, 7(1), pp. 1–9.
[2] Bittner R., Algebraic and analytic properties of solutions of abstract differential equations, ‘Dissertationes Math.’, 41, PWN, Warszawa 1964.

Hubert Wysocki
120 Zeszyty Naukowe AMW
[3] Bittner R., Rachunek operatorów w przestrzeniach liniowych, PWN, Warszawa 1974.
[4] Hosseinzadeh H., Afrouzi G. A., Backward ‐difference operator and solving difference equations, ‘Int. J. Contemp. Math. Sci.’, 2008, Vol. 3, 36, pp. 1755–1765.
[5] Kocik J., Lens sequences, e‐print: arXiv:0710.3226v1.
[6] Levy H., Lessman F., Finite Difference Equations, Pitman and Sons, London 1959.
[7] Wysocki H., The result derivative. Distributive results, ‘Acta Math. Hung.’, 1989, 53 (3–4), pp. 289–307.
[8] Wysocki H., Model nieklasycznego rachunku operatorów Bittnera dla różnicy wstecznej, „Zeszyty Naukowe AMW”, 2010, nr 2 (181), s. 37–48.
[9] Wysocki H., Rozwiązanie liniowego równania różnicowego w przestrzeni wyni-ków generowanej przez ciągi dwustronne, „Zeszyty Naukowe AMW”, 2010, nr 3 (182), s. 85–101.
T H E B A C K W A R D - D I F F E R E N C E O P E R A T I O N A L C A L C U L U S M O D E L
ABSTRACT
The paper presents a discrete model of Bittner’s operational calculus, in which the deriva-tive is understood as a difference operation . The model is a generalization of the -model with the backward difference .
Keywords: operational calculus, derivative, integrals, limit conditions, backward difference, exponential element.

Wskazówki dla autorów
1. Artykuły należy dostarczać w wersjach elektronicznej w formacie edytora Word (.doc lub .docx) oraz papierowej (dwa egzemplarze). Powinny mieć parzystą liczbę stron i nie przekraczać objętości jednego arkusza autorskiego. Wszystkie artykuły są recenzowane.
Przebieg procedury recenzowania
Wszystkie artykuły są recenzowane. Procedura recenzowania artykułów jest zgodna z zaleceniami Ministerstwa Nauki i Szkolnictwa Wyższego, opisanymi m.in. w dokumencie Dobre praktyki w procedurach recenzyjnych w nauce, Warszawa 2011. Złożone w Redakcji ZN artykuły są poddawane ocenie formalnej przez redaktorów tematycznych, kwalifikowane do recenzji merytorycznych, a następnie recenzowane przez dwóch niezależnych recenzentów, którymi są osoby mające tytuł naukowy profesora lub stopień naukowy doktora habilitowanego w danej dziedzinie i reputację rzetelnego recenzenta. Recenzenci muszą gwarantować: niezależność opinii, brak konfliktu interesów oraz brak relacji osobistych i służbowych z autorami artykułu. Recenzowanie odbywa się w systemie single-blind peer review process (recenzenci znają tożsamość autorów, ale autorzy nie znają tożsamości recenzentów). Jeżeli recenzent nie podejmuje się wykonania recenzji, Komitet Redakcyjny ZN może wyznaczyć innego recenzenta. W przypadkach spornych powoływani są dodatkowi recenzenci. Opinie wszystkich recenzentów są należycie respektowane. Recenzja ma formę pisemną i kończy się jednoznacznym wnioskiem co do dopuszczenia artykułu do publikacji lub jego odrzucenia. Recenzentom nie wolno wykorzystywać wiedzy na temat artykułu przed jego publikacją. Autor jest informowany o wyniku dokonanej recenzji i otrzymuje ją do wglądu po zatajeniu nazwiska recenzenta, następnie jest możliwa korespondencja z Redakcją ZN AMW dotycząca ewentualnych uwag. Raz w roku podawana jest lista recenzentów.
2. Autorzy mają obowiązek złożyć wraz z tekstem oświadczenia o przeniesieniu praw autorskich oraz wkładzie autorów w powstanie publikacji (dostępne na stronie internetowej AMW w zakładce Zeszyty Naukowe -> Informacje dla autorów).
3. Format artykułu: ⎯ B5 ⎯ marginesy 25 mm ⎯ pojedynczy odstęp między wierszami ⎯ czcionka Times New Roman, wys. 11 p.
4. Układ artykułu: ⎯ imię i nazwisko ⎯ afiliacja ⎯ tytuł ⎯ streszczenie ⎯ słowa kluczowe ⎯ wstęp ⎯ część zasadnicza opisująca metodykę badań i uzyskane wyniki ⎯ wnioski (lub podsumowanie) ⎯ bibliografia ⎯ tytuł, streszczenie i słowa kluczowe w języku angielskim
5. Rysunki: ⎯ ponumerowane, ich szerokość nie może przekraczać 13 cm ⎯ podpisy pod rysunkami czcionką 10 p.
6. Tabele: ⎯ ponumerowane, ich szerokość nie może przekraczać 13 cm ⎯ tytuły nad tabelami czcionką 10 p. ⎯ tekst w tabelach 10 p.
7. Wzory: ⎯ ponumerowane, pisane w edytorze równań

8. Bibliografia: ⎯ ujednolicona i uporządkowana alfabetycznie, zapisana wg poniższych kryteriów [1] Autor (nazwisko, inicjał imienia), Tytuł, wydawca, miejsce i rok wydania.
(zapis dla monografii) [2] Autor (nazwisko, inicjał imienia), Tytuł, [w:] Tytuł, red. (inicjał imienia, nazwisko), wydawca,
miejsce i rok wydania. (zapis dla tekstu w książce pod redakcją)
[3] Autor (nazwisko, inicjał imienia), Tytuł, „Tytuł Czasopisma”, rok, numer, strony. (zapis dla artykułu w czasopiśmie naukowym)
[4] Autor (nazwisko, inicjał imienia), Tytuł, nazwa konferencji, wydawca, miejsce i rok, strony. (zapis dla referatu konferencyjnego)
[5] Autor (nazwisko, inicjał imienia), Tytuł, właściciel, numer, data. (zapis dla patentu)
[6] Numer i rok. Tytuł. (zapis dla normy)
Stosowana norma: PN-ISO 690:2002. Dokumentacja. Przypisy bibliograficzne. Zawartość, forma i struktura
W przypadku wykorzystania dokumentu elektronicznego należy stosować dodatkowo normę: PN-ISO 690-2:1999. Informacja i dokumentacja. Przypisy bibliograficzne. Dokumenty elektroniczne i ich części